vectores y escalares - iliberis.com · vectores y escalares las magnitudes escalares son aquellas...
TRANSCRIPT
VECTORES Y ESCALARES Las magnitudes escalares son aquellas que quedan totalmente definidas al expresar la cantidad y la unidad en que se mide. Ejemplos son la masa, el tiempo, el trabajo y todas las energías, etc. Las magnitudes que no quedan completamente definidas con solo indicar la cantidad las llamamos vectores. La mayoría de las magnitudes físicas lo son, e incluso algunas que no son vectores se definen como producto escalar de vectores, como ocurre con el trabajo, la potencia, el flujo, la ddp, etc Si a una puerta entreabierta le aplicamos una fuerza de 2 Newton podemos abrirla, cerrarla e incluso no moverla, todo depende de cómo se aplique esa fuerza. Cuando decimos que un coche se mueve con una velocidad de 20 m/s, quien nos escuche es incapaz de saber si va hacia el norte o el sur o el sureste. Debemos decirle algo más. Para caracterizar completamente una magnitud vectorial, como son la velocidad, aceleración, fuerza, etc, es preciso indicar tres cosas:
1. El módulo, que es la cantidad de magnitud y que naturalmente deberá ir acompañada de la unidad en que se ha medido.
2. La dirección, que es la recta sobre la cual actúa la magnitud vectorial. Por ejemplo, cuando un coche circula por una calle, la calle es la dirección en la que se mueve el coche.
3. El sentido, que es el que nos indica si recorre la calle hacia un lado o el contrario.
Es interesante hacer notar que con frecuencia los conceptos dirección y sentido se emplean mal en la vida cotidiana, así cuando se dice que una calle es de dirección prohibida, lo que se quiere decir es que es de sentido único, puesto que un coche tanto si circula en un sentido o el contrario lleva la misma dirección. Una calle de dirección prohibida, en el sentido estricto, sería una calle por la que no se puede circular en ningún sentido. Notación de un vector: Las magnitudes vectoriales se pueden notar de dos maneras:
• Con una letra corriente, sobre la que se pone una flechita: Fr
• Con una letra tipo negrita: F
Cuando se nota de una de estas dos maneras se expresa el vector completo (módulo, dirección y sentido) Cuando solo se quiere expresar el módulo se hace poniendo la letra normal sin la
flechita o bien de una de las formas anteriores, pero encerrándolo entre barras: F o Fr
En lo sucesivo utilizaremos las notaciones siguientes:
Vector: vr
ar
Fr
... Módulo: v a F ...
Naturalmente, puesto que la mayoría de las magnitudes físicas son vectores es absolutamente necesario que manejes con soltura todo lo relacionado con ellos, y aunque los vectores son entes matemáticos, y por eso cuando se estudia el cálculo vectorial resulta algo abstracto, porque las matemáticas en sí lo son, ya verás que la física no es así. En lo que sigue, para no referirnos a una magnitud física concreta sino a vectores en
general, utilizaremos los vectores ,...C,B,Arrr
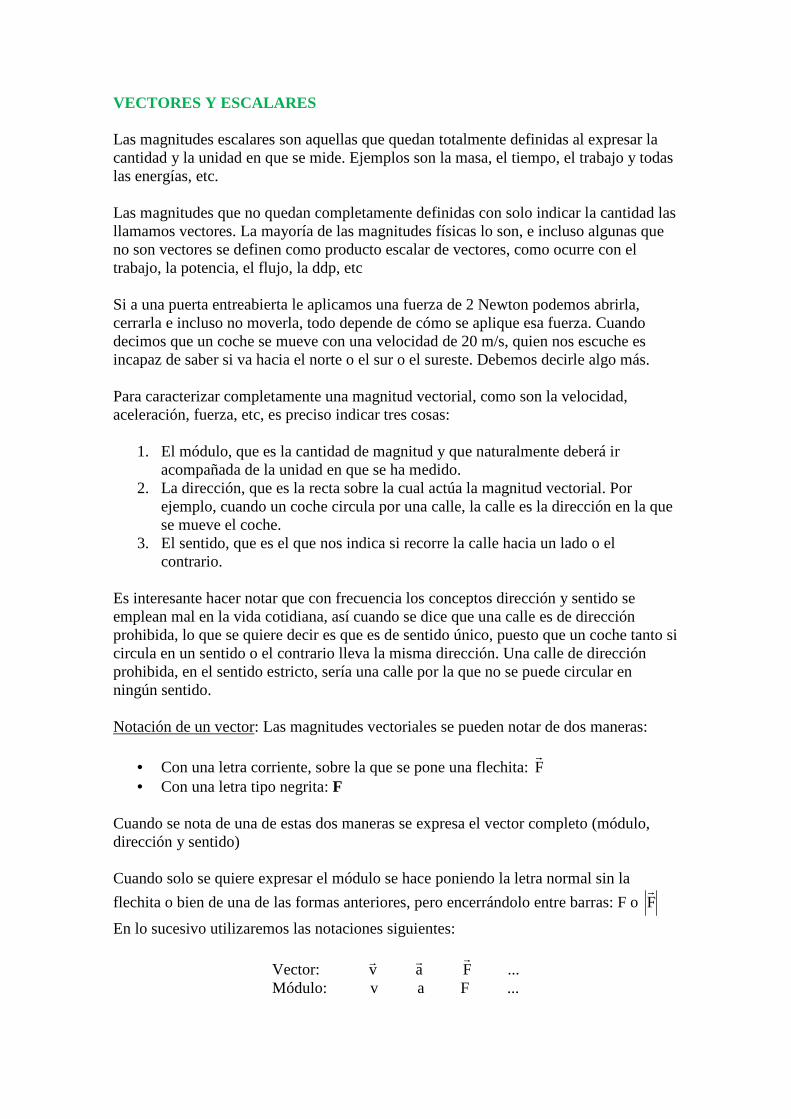
FORMAS DE EXPRESAR UN VECTOR Un vector se puede expresar de varias formas y deber conocer perfectamente cada una de ellas y la forma de pasar de unas a otras. Estas formas son: 1. Dado el módulo, la dirección y el sentido Supongamos, para facilitar la comprensión, que el vector se encuentra contenido en el plano del papel y más adelante generalizaremos para tres dimensiones. Supongamos un sistema de referencia o ejes cartesianos y vamos a representar un vector Ar
de módulo 4, que forma un ángulo de 30º con el eje X y apunta hacia el noroeste:
• Al decir que el módulo es de 4 unidades representamos un segmento de 4 unidades de largo.
• Al decir que forma un ángulo de 30º con el eje X nos están dando la dirección del vector, es decir la recta sobre la que está montado
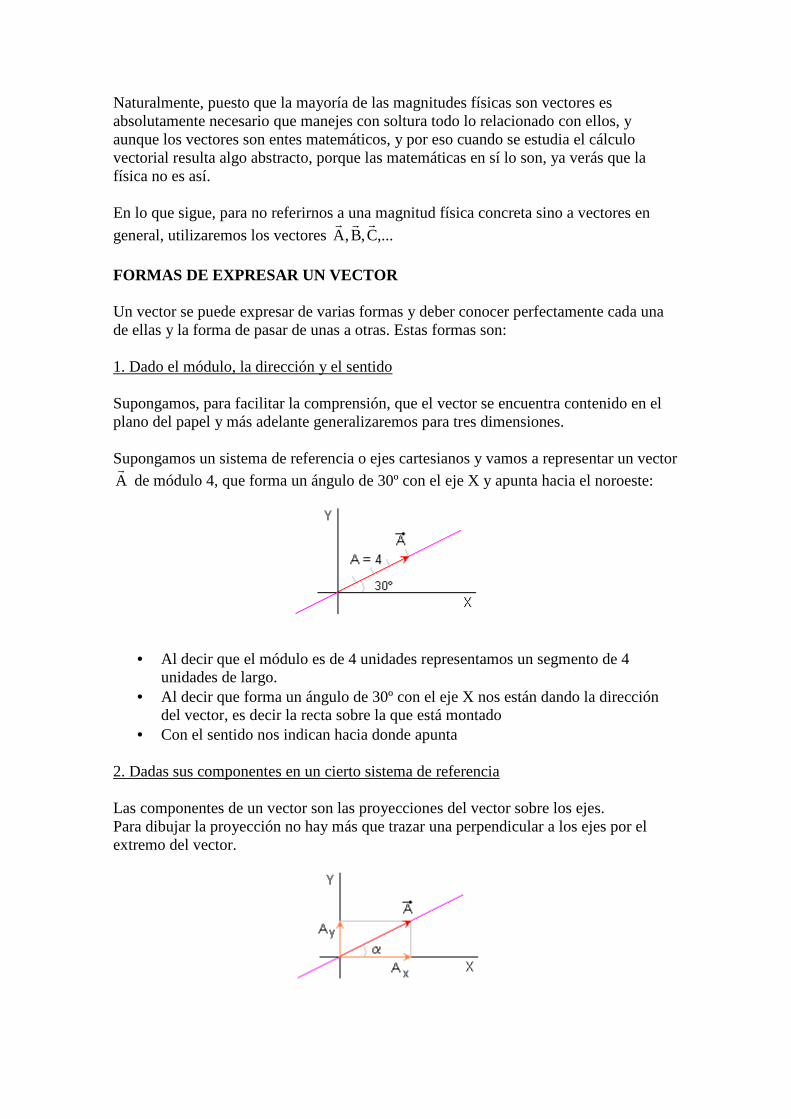
• Con el sentido nos indican hacia donde apunta 2. Dadas sus componentes en un cierto sistema de referencia Las componentes de un vector son las proyecciones del vector sobre los ejes. Para dibujar la proyección no hay más que trazar una perpendicular a los ejes por el extremo del vector.

Se definen unos vectores unitarios (es decir que tienen módulo igual a la unidad) y que tienen la dirección de los ejes y apuntan hacia la parte positiva:
• Para el eje X, el vector unitario ir
• Para el eje Y, el vector unitario j
r
• Para el eje Z, el vector unitario kr
con esto representamos al vector unitario A
r en función de sus componentes de la
siguiente forma:
jAiAA yx
rrr+=
Ejemplo: Pon en función de sus componentes un vector que tiene de módulo 5 unidades y forma un ángulo de 37º con el eje X.
jAiAA yx
rrr+=
El único problema está en saber cuanto valen las componentes del vector Ax y Ay. Como sabes, por definición, el coseno de un ángulo es igual al cateto contiguo dividido por la hipotenusa. El cateto contiguo al ángulo es igual, como se aprecia en la figura, Ax y la hipotenusa es el módulo del vector, por tanto:
A
Acos x=α ⇒ α⋅= cosAA x
De la misma manera, recordando que el seno de un ángulo, por definición, es igual al cateto opuesto (Ay) dividido por la hipotenusa (A), tendremos:
A
Asen y=α ⇒ α⋅= senAA y
por tanto, sustituyendo en la expresión del vector tendremos que el vector A
r en función
de sus componentes es:
j3i 4j 37sen5i 37cos5j senAi cosAjAiAA yx
rrrrrrrrr+=⋅+⋅=α⋅+α⋅=+=

Ejemplo:
Ahora vamos a resolver el ejercicio al revés, es decir, dado el vector j3i 4Arrr
+= calcular su módulo, la dirección y sentido, es decir el ángulo que forma con los ejes. La primera operación es ayudarnos de una figura, por lo menos hasta que estos conceptos se manejen suficientemente. Así que tomamos 4 divisiones en el eje X (ya que Ax=4) y 3 divisiones en el eje Y (Ay=3) y se levantan las perpendiculares a los ejes hasta que se corten en lo que será el extremo del vector:
Como puedes ver, el triángulo (en azul) es un triángulo rectángulo del que conocemos los catetos que son Ax y Ay, así que aplicando el teorema de Pitágoras podemos calcular la hipotenusa A que es precisamente el módulo del vector:
2y
2x
2 AAA += ⇒ 534AAA 222y
2x =+=+=
Para calcular el ángulo que el vector forma con el eje X recordemos que la tangente de un ángulo es igual a seno partido por coseno, es decir al cateto opuesto (Ay) dividido por el cateto contiguo (Ax)
x
y
A
A tg =α ⇒ º37
4
3arctg
A
Aarctag
x
y ===α
El ángulo α se mide siempre desde el eje X en sentido antihorario, de manera que a demás de la dirección nos indica el sentido. En efecto, ya que un vector de la misma dirección y sentido opuesto formaría con el eje X un ángulo de 217º (180+37) Naturalmente, el ángulo β que forma con el eje Y es el complementario de α, es decir que º533790 =−=β
Ejemplos: Haz un resumen de las dos formas de expresar un vector que hemos visto y resuelve los dos ejercicios siguientes: a) Un vector tiene de módulo 7 unidades y forma un ángulo de 30º con el eje X.
Exprésalo en función de sus componentes. Solución: j 5,3i 1,6Arrr
+=
b) Hallar el módulo y el ángulo que forma con el eje X el vector j 8i 6Arrr
+=
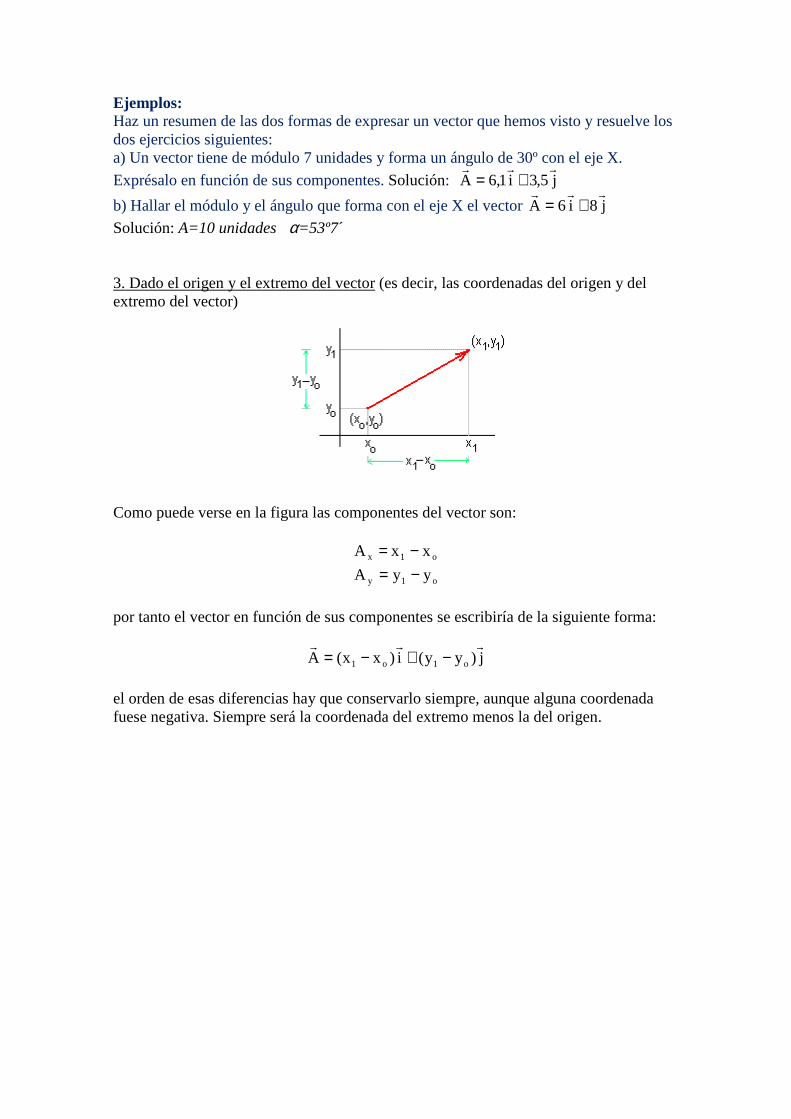
Solución: A=10 unidades α=53º7́ 3. Dado el origen y el extremo del vector (es decir, las coordenadas del origen y del extremo del vector)
Como puede verse en la figura las componentes del vector son:
o1x xxA −=
o1y yyA −=
por tanto el vector en función de sus componentes se escribiría de la siguiente forma:
j)yy(i) xx(A o1o1
rrr−+−=
el orden de esas diferencias hay que conservarlo siempre, aunque alguna coordenada fuese negativa. Siempre será la coordenada del extremo menos la del origen.
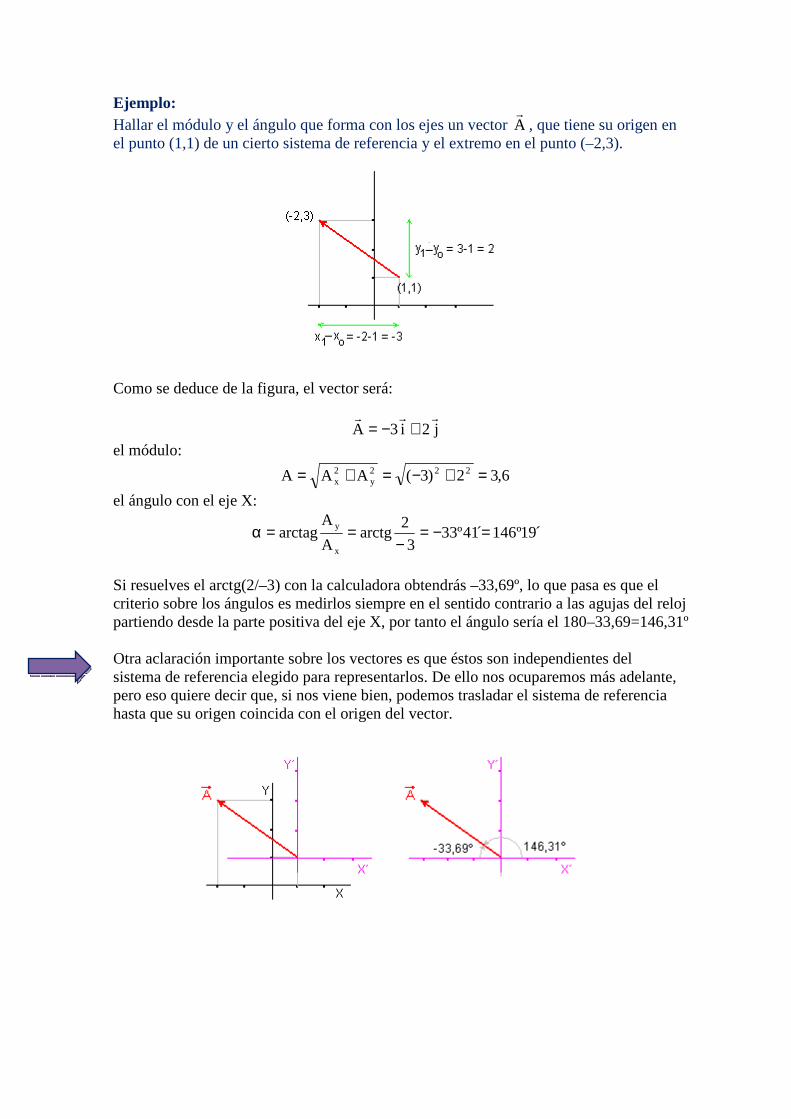
Ejemplo: Hallar el módulo y el ángulo que forma con los ejes un vector A
r, que tiene su origen en
el punto (1,1) de un cierto sistema de referencia y el extremo en el punto (–2,3).
Como se deduce de la figura, el vector será:
j 2i 3Arrr
+−= el módulo:
6,32)3(AAA 222y
2x =+−=+=
el ángulo con el eje X:
´19º146´41º333
2arctg
A
Aarctag
x
y =−=−
==α
Si resuelves el arctg(2/–3) con la calculadora obtendrás –33,69º, lo que pasa es que el criterio sobre los ángulos es medirlos siempre en el sentido contrario a las agujas del reloj partiendo desde la parte positiva del eje X, por tanto el ángulo sería el 180–33,69=146,31º Otra aclaración importante sobre los vectores es que éstos son independientes del sistema de referencia elegido para representarlos. De ello nos ocuparemos más adelante, pero eso quiere decir que, si nos viene bien, podemos trasladar el sistema de referencia hasta que su origen coincida con el origen del vector.

VECTOR UNITARIO DE UN VECTOR El vector unitario de un vector A
r es aquel que tiene de módulo la unidad y la misma
dirección y sentido que el vector Ar
. Se representa como Aur
Puesto que el vector unitario tiene la misma dirección y sentido que el A
r puede
servirnos para expresarlo, ya que si multiplicamos el vector unitario Aur
por el módulo
del vector Ar
obtendremos a dicho vector:
AuAArr
⋅= En la expresión anterior: A es el módulo del vector y Au
rnos da su dirección y sentido.
Ejemplo: Calcular el vector unitario del vector j 3i 4A
rrr+=
Teniendo en cuenta que AuAArr
⋅= y despejando el vector unitario, tendremos que
(puesto que el módulo del vector es 534AAA 222y
2x =+=+= ):
j5
3i
5
4
5
j 3i 4
A
AuA
rrrrr
r +=+==
PRODUCTO DE UN ESCALAR POR UN VECTOR Sea un escalar (un número) t, al multiplicarlo por un vector A
r se tiene (exactamente
igual que cuando se multiplican funciones):
jtAitAAt yx
rrr+=
Como vemos, al multiplicar un vector por un escalar se obtiene otro vector, cuyas componentes han quedado multiplicadas por dicho escalar y por tanto: El vector que se obtiene es de la misma dirección y sentido (si el escalar es positivo) que el vector A
r,
solo que su módulo ha quedado multiplicado por el escalar. Evidentemente, si el escalar es negativo el vector tendría la misma dirección, pero el sentido opuesto.
De acuerdo con la segunda ley de Newton a mFrr
= , por tanto la fuerza y la aceleración son dos vectores de la misma dirección y del mismo sentido.

Ejemplo: Multiplicar por 2 el vector j4i3A
rrr+= y comprobar que el nuevo vector B
r tiene la
misma dirección y sentido y que su módulo es dos veces mayor que el del vector Ar
j8i6j42i32A2Brrrrrr
+=⋅+⋅== El ángulo que forma el vector A
r con el eje X viene dado por:
º13,533
4arctag ==α
y el ángulo que forma Br
con el eje X es
º13,536
8arctag ==α
el módulo de Ar
es:
543A 22 =+=
el módulo de Br
es:
1086B 22 =+= Ya te habrás dado cuenta de que habíamos utilizado el concepto de producto de un escalar por un vector antes de explicarlo, porque no es ni más ni menos que lo que hicimos al definir un vector como producto de su módulo por su vector unitario. COSENOS DIRECTORES DE UN VECTOR Se llaman así a los cosenos de los ángulos que el vector forma con los ejes. Por convenio a los ángulos se les asignan las letras βα , y γ a los ángulos que el vector forma con los ejes X, Y y Z respectivamente.
A
Acos x=α
A
Acos y=β
A
Acos z=γ
Como puedes imaginar, conociendo los cosenos directores de un vector y su módulo también podremos expresar al vector.
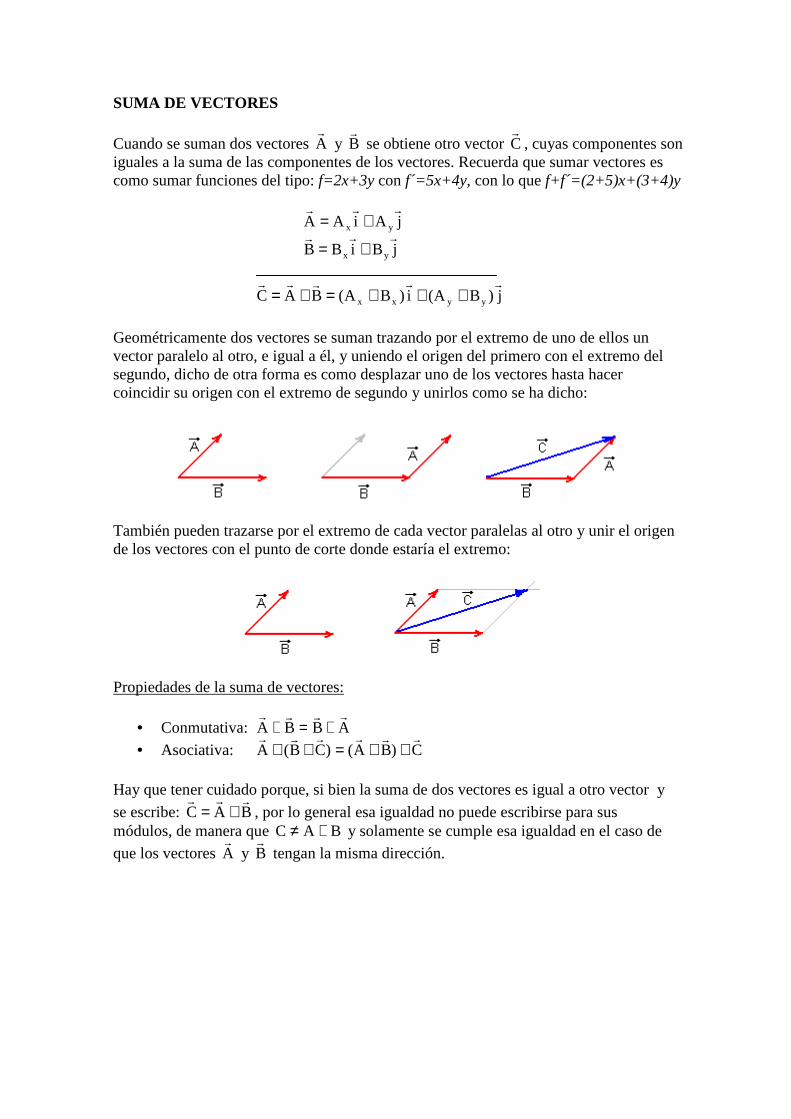
SUMA DE VECTORES
Cuando se suman dos vectores Ar
y Br
se obtiene otro vector Cr
, cuyas componentes son iguales a la suma de las componentes de los vectores. Recuerda que sumar vectores es como sumar funciones del tipo: f=2x+3y con f´=5x+4y, con lo que f+f´=(2+5)x+(3+4)y
jAiAA yx
rrr+=
jBiBB yx
rrr+=
j) BA(i) BA(BAC yyxx
rrrrr+++=+=
Geométricamente dos vectores se suman trazando por el extremo de uno de ellos un vector paralelo al otro, e igual a él, y uniendo el origen del primero con el extremo del segundo, dicho de otra forma es como desplazar uno de los vectores hasta hacer coincidir su origen con el extremo de segundo y unirlos como se ha dicho:
También pueden trazarse por el extremo de cada vector paralelas al otro y unir el origen de los vectores con el punto de corte donde estaría el extremo:
Propiedades de la suma de vectores:
• Conmutativa: ABBArrrr
+=+
• Asociativa: C)BA()CB(Arrrrrr
++=++ Hay que tener cuidado porque, si bien la suma de dos vectores es igual a otro vector y
se escribe: BACrrr
+= , por lo general esa igualdad no puede escribirse para sus módulos, de manera que BAC +≠ y solamente se cumple esa igualdad en el caso de
que los vectores Ar
y Br
tengan la misma dirección.

Ejemplo: Dados los vectores j4i3A
rrr+= y i2B
rr= obtener el vector suma.
Simplemente lo que hay que hacer es poner los vectores uno debajo del otro y sumarlos:
j4i3Arrr
+=
i2Brr
=
j 4i 5j 4i) 23(BACrrrrrrr
+=++=+= Como puedes comprobar los módulos de los vectores son A=5 y B=2 mientras que C=6,4, por tanto:
BAC +≠ DIFERENCIA DE VECTORES Restar dos vectores es igual que sumarle a uno el opuesto al otro, es decir que:
)B(ABArrrr
−+=− Se dice que dos vectores son opuestos cuando tienen el mismo módulo, la misma dirección, pero sentidos contrarios. El vector opuesto se obtiene cambiándole el signo a todas las componentes del vector, es decir, multiplicándolo por –1. Ejemplo:
Dados los vectores j4i3Arrr
+= y i2Brr
= , obtener el vector BArr
−
Si el vector i2Brr
= entonces el vector opuesto es i2Brr
−=− , así que:
j4i3Arrr
+=
i2Brr
−=−
j 4i j 4i) 23()B(ACrrrrrrr
+=+−=−+= gráficamente sería:
Recuerda: Siempre que haya que sumar vectores debes hacer lo siguiente:
• Si vienen dados en función de sus componentes, se suman miembro a miembro como hemos visto antes
• Si vienen dados como módulo y dirección (que será probablemente el caso más frecuente) debes hacer lo siguiente:
� Elegir un sistema de referencia, que puede ser cualquiera, y por lo tanto
el que más interese, es decir aquel en el que la mayoría de los vectores tengan las direcciones de los ejes.
� Descomponer todos los vectores en ese sistema de referencia, es decir ponerlos en función de sus componentes
� Una vez hecho esto, se ponen unos debajo de otros y se suman miembro a miembro
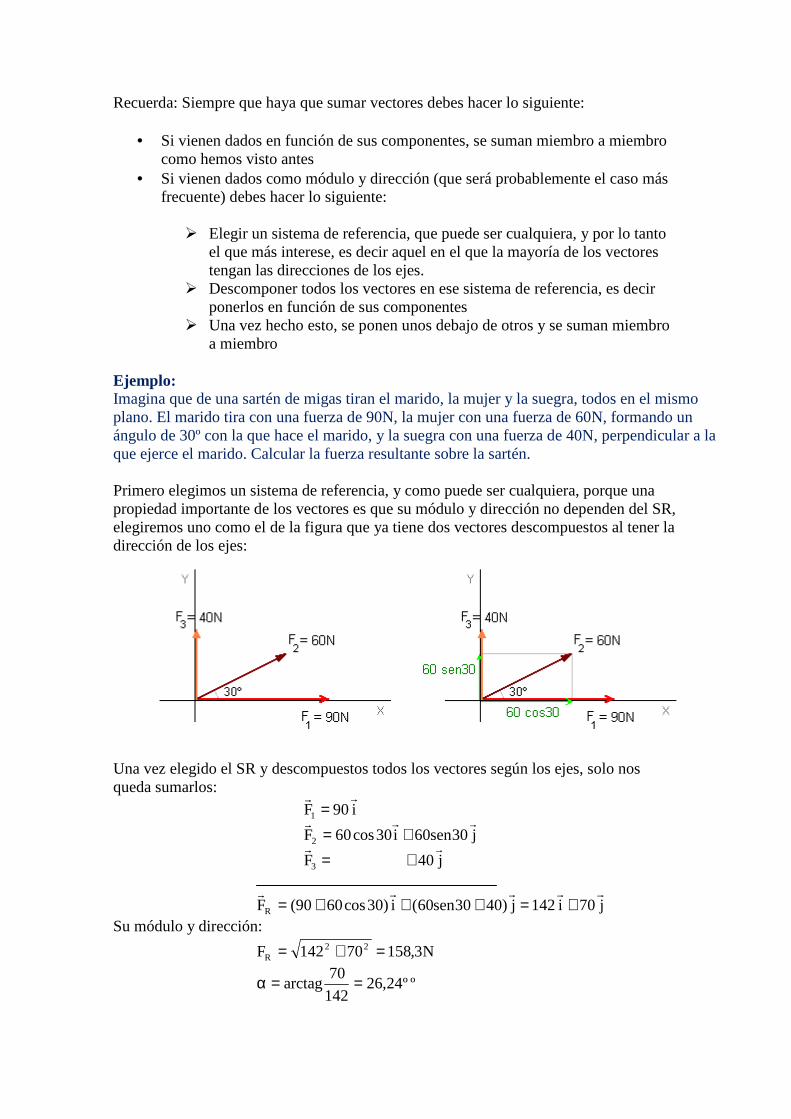
Ejemplo: Imagina que de una sartén de migas tiran el marido, la mujer y la suegra, todos en el mismo plano. El marido tira con una fuerza de 90N, la mujer con una fuerza de 60N, formando un ángulo de 30º con la que hace el marido, y la suegra con una fuerza de 40N, perpendicular a la que ejerce el marido. Calcular la fuerza resultante sobre la sartén. Primero elegimos un sistema de referencia, y como puede ser cualquiera, porque una propiedad importante de los vectores es que su módulo y dirección no dependen del SR, elegiremos uno como el de la figura que ya tiene dos vectores descompuestos al tener la dirección de los ejes:
Una vez elegido el SR y descompuestos todos los vectores según los ejes, solo nos queda sumarlos:
i 90F1
rr=
j 30sen60i30cos60F2
rrr+=
=3Fr
j 40r
+
j 70i 142j) 4030sen60(i) 30cos6090(FR
rrrrr+=+++=
Su módulo y dirección:
N3,15870142F 22R =+=
ºº24,26142
70arctag ==α
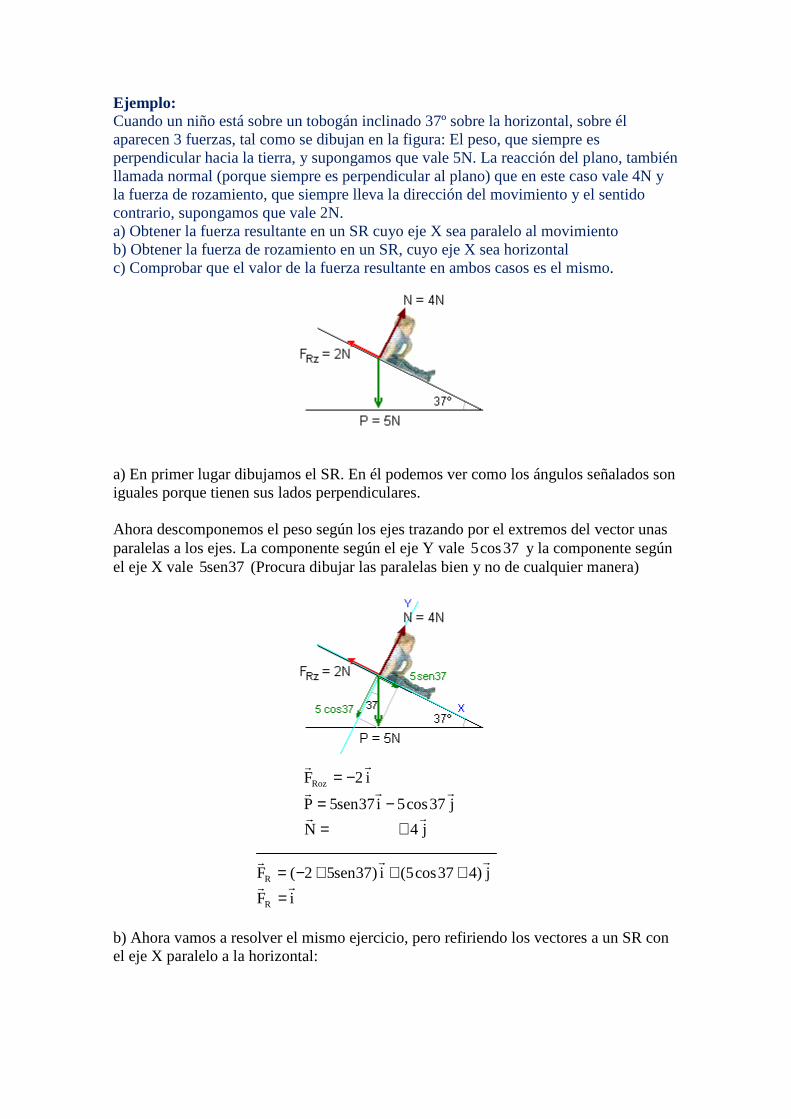
Ejemplo: Cuando un niño está sobre un tobogán inclinado 37º sobre la horizontal, sobre él aparecen 3 fuerzas, tal como se dibujan en la figura: El peso, que siempre es perpendicular hacia la tierra, y supongamos que vale 5N. La reacción del plano, también llamada normal (porque siempre es perpendicular al plano) que en este caso vale 4N y la fuerza de rozamiento, que siempre lleva la dirección del movimiento y el sentido contrario, supongamos que vale 2N. a) Obtener la fuerza resultante en un SR cuyo eje X sea paralelo al movimiento b) Obtener la fuerza de rozamiento en un SR, cuyo eje X sea horizontal c) Comprobar que el valor de la fuerza resultante en ambos casos es el mismo.
a) En primer lugar dibujamos el SR. En él podemos ver como los ángulos señalados son iguales porque tienen sus lados perpendiculares. Ahora descomponemos el peso según los ejes trazando por el extremos del vector unas paralelas a los ejes. La componente según el eje Y vale 37cos5 y la componente según el eje X vale 37sen5 (Procura dibujar las paralelas bien y no de cualquier manera)
i 2FRoz
rr−=
j 37cos5i37sen5Prrr
−=
=Nr
j 4r
+
j) 437cos5(i) 37sen52(FR
rrr+++−=
i FR
rr=
b) Ahora vamos a resolver el mismo ejercicio, pero refiriendo los vectores a un SR con el eje X paralelo a la horizontal:

j 37sen2i37cos2FRoz
rrr+−=
=Pr
j5r
−
j 37cos4i37sen4Nrrr
+=
j) 37cos4537sen2(i) 37sen437cos2(FR
rrr+−++−=
j 6,0i 8,0 FR
rrr−=
c) El vector resultante en cada SR ha sido:
i FR
rr= ⇒ N1FR = y º0=α
j 6,0i 8,0 FR
rrr−= ⇒ N1FR = y º37´ −=α
Salta a la vista que ambos vectores tienen distintas componentes y que por tanto las componentes de un vector dependen del SR elegido para referirlo. Sin embargo el módulo del vector es el mismo en ambos casos y aunque el ángulo que forma con el eje X no lo es, su dirección sí, ya que como puedes ver ambos SR están girados un ángulo de 37º y por tanto la relación entre los ángulos es º37´+= αα PRODUCTO ESCALAR DE DOS VECTORES
Por definición, el producto escalar de dos vectores Ar
y Br
es igual al producto de sus módulos por el coseno del ángulo que forman. Por tanto, como su nombre indica, el resultado es un escalar, es decir un número. Se nota con un punto grueso entre ambos vectores:
α=• cosB ABArr
De la definición de producto escalar se deduce que:
• El producto escalar de dos vectores perpendiculares entre sí, es decir que formen 90º, es nulo porque cos90=0. Así pues:
001190cosjiji =⋅⋅=⋅•=•rrrr
0kjkiji =•=•=•rrrrrr

• El producto escalar de un vector unitario por él mismo es igual a la unidad:
11110cosiiii =⋅⋅=⋅•=•rrrr
1kkjjii =•=•=•rrrrrr
A partir de la definición de producto escalar puede deducirse otra forma alterativa para calcularlo. Vamos a efectuar el producto escalar de dos vectores en función de sus componentes (Recuerda que se multiplican exactamente como si se tratara de polinomios)
jAiAA yx
rrr+=
jBiBB yx
rrr+=
jjBAijBAjiBAiiBABA yyxyyxxx
rrrrrrrrrr•+•+•+•=•
y nos queda que:
yyxx BABABA +=•rr
Propiedades del producto escalar:
• Conmutativa: ABBArrrr
•=• • No puede tener la propiedad asociativa porque sencillamente es imposible
multiplicar tres vectores escalarmente, pero sí se cumple C)BA()CB(Arrrrrr
••=•• aunque el resultado de ello obviamente es un vector.
• Distributiva: CABA)CB(Arrrrrrr
•+•=•• Interpretación geométrica del producto escalar: El producto escalar de dos vectores es igual al producto del módulo de uno de ellos por la proyección del otro sobre él. Veamos:
α=• cosB ABArr
= BP A
A
BAPB
rr•= y también
B
BAPA
rr•=
Ángulo que forman dos vectores: El producto escalar puede utilizarse para saber si dos vectores son perpendiculares, porque en tal caso el resultado sería nulo. Pero también puede utilizarse para saber el ángulo que forman dos vectores entre sí, ya que:
yyxx BABA cosB ABA +=α=•rr
de aquí:
B A
BABAcos yyxx +
=α
naturalmente α es el arco coseno de esa expresión
Ejemplo:
Obtener el producto escalar de los vectores j3i 4Arrr
+= y j5i 12Brrr
+= ¿Qué ángulo forman entre sí?
63154853124BABABA yyxx =+=⋅+⋅=+=•rr
Para calcular el ángulo que forman los vectores necesitamos conocer los módulos, así que:
534A 22 =+=
13512B 22 =+= El ángulo que forman es:
´15º14135
63arccos
B A
BABAarccos yyxx =
⋅=
+=α
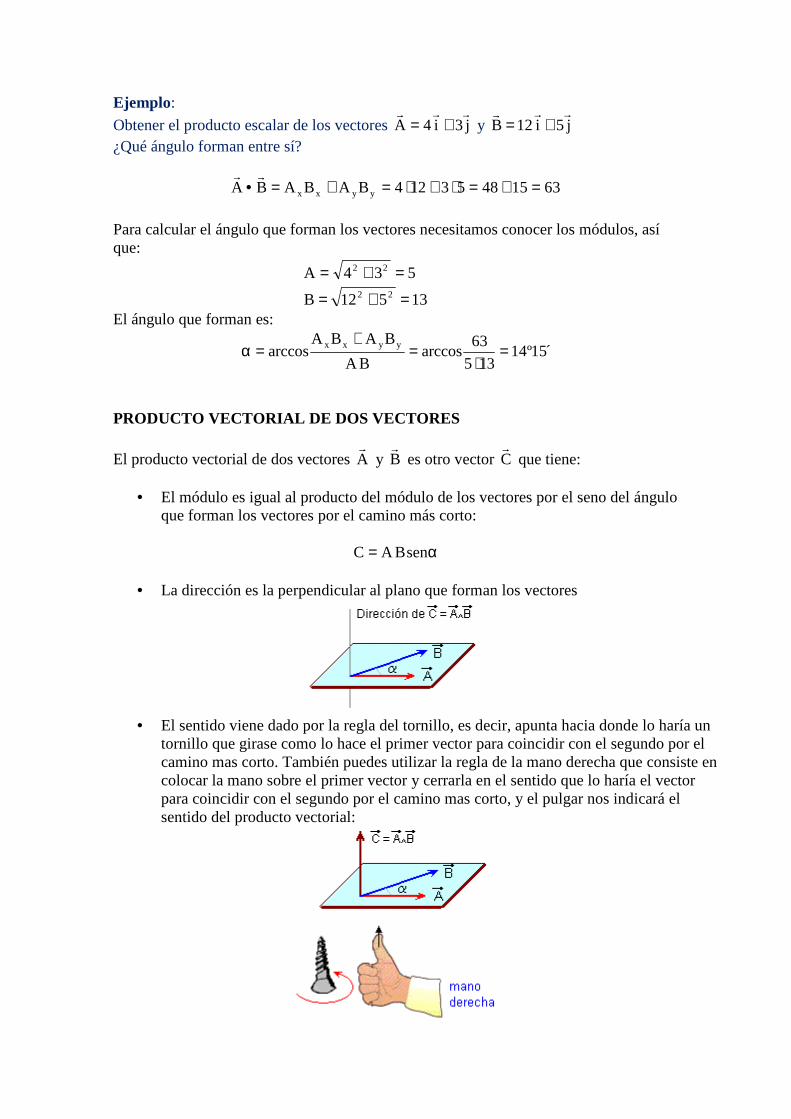
PRODUCTO VECTORIAL DE DOS VECTORES
El producto vectorial de dos vectores Ar
y Br
es otro vector Cr
que tiene:
• El módulo es igual al producto del módulo de los vectores por el seno del ángulo que forman los vectores por el camino más corto:
α= sen B AC
• La dirección es la perpendicular al plano que forman los vectores
• El sentido viene dado por la regla del tornillo, es decir, apunta hacia donde lo haría un
tornillo que girase como lo hace el primer vector para coincidir con el segundo por el camino mas corto. También puedes utilizar la regla de la mano derecha que consiste en colocar la mano sobre el primer vector y cerrarla en el sentido que lo haría el vector para coincidir con el segundo por el camino mas corto, y el pulgar nos indicará el sentido del producto vectorial:

• Notación: Se nota con un aspa o el símbolo ∧ (como una v invertida). Utilizaremos siempre la segunda forma porque el aspa es fácil de confundir con una equis.
De la definición de producto vectorial se deduce que:
• El producto vectorial de dos vectores de la misma dirección es nulo porque sen0=0.
0kkjjii =∧=∧=∧rrrrrr
• Cuando realicemos el producto vectorial de dos vectores unitarios distintos se obtiene otro también unitario y perpendicular al plano que forman. Por ejemplo:
111190senjiji =⋅⋅=⋅∧=∧rrrr
como sabemos esto es solo el módulo del vector, su dirección será la perpendicular al
plano que contiene los vectores ir
y jr
, es decir, su dirección será según el eje Z, y su sentido según la regla de la mano derecha hacia arriba, por tanto:
kjirrr
=∧
Así pues, con la ayuda de la figura y aplicando la regla de la mano derecha podemos comprobar que:
kjirrr
=∧ kijrrr
−=∧
jkirrr
−=∧ jikrrr
=∧
ikjrrr
=∧ ijkrrr
−=∧ Ahora vamos a ver como a partir de la definición de producto vectorial puede deducirse la forma para calcularlo a partir de sus componentes. Basta con multiplicar como si se tratase de polinomios, pero cuidando de no alterar el orden, porque como hemos visto más arriba no tiene la propiedad conmutativa.
kAjAiAA zyx
rrrr++=
kBjBiBB zyx
rrrr++=
+∧+∧+∧=∧ kiBAjiBAiiBABA zxyxxx
rrrrrrrr
0 kr
– jr
+∧+∧+∧+ kjBAjjBAijBA zyyyxy
rrrrrr
–kr
0 ir
kkBAjkBAikBA zzyzxz
rrrrrr∧+∧+∧+
jr
–ir
0

agrupando queda:
k) BABA(j)BABA(i) BABA(BA xyyxzxxzyzzy
rrrrr−+−+−=∧
Precisamente este vector coincide con el desarrollo del siguiente determinante:
ir
jr
kr
=∧ BArr
xA yA zA
xB yB zB
en la primera fila se ponen siempre los vectores unitarios. En la segunda fila las componentes del primer vector y en la tercera fila las componentes del segundo vector. (Si alteramos el orden de alguna fila, como sabemos, obtendríamos el determinante cambiado de signo y por tanto el vector opuesto.) Propiedades del producto vectorial:
• NO tiene la propiedad conmutativa, ya que si se altera el orden de los vectores se obtendría el vector opuesto, así que:
ABBArrrr
∧≠∧ o bien que: )AB(BArrrr
∧−=∧
• Asociativa: C)BA()CB(Arrrrrr
∧∧=∧∧
• Distributiva: CABA)CB(Arrrrrrr
∧+∧=∧∧ Interpretación geométrica del producto vectorial: El módulo del producto vectorial de dos vectores es igual al área del paralelogramo que ambos vectores forman entre sí.
α=∧ sen B ABArr
= AreaalturaBaseh A B =⋅=
2
BAuloAreaTriáng
rr∧
=

Ejemplo:
Obtener el producto vectorial de los vectores j3i 4Arrr
+= y j5i 12Brrr
+= ¿Cuál es el área del triángulo que forman entre sí? Ya calculamos en el ejercicio anterior el módulo de esos vectores y el ángulo que forman entre sí, por tanto el módulo del vector que resulta de multiplicarlos vectorialmente es, de acuerdo con la definición:
16´15º14sen135sen ABBA =⋅⋅=α=∧rr
La dirección del vector será la perpendicular al plano que forman los vectores, que como solamente tienen componentes según los ejes X e Y evidentemente están en ese
plano y por lo tanto el vector Cr
debe tener la dirección del eje Z, es decir la dirección del vector unitario k
r o de k
r− según sea su sentido.
Como se deduce de la figura, al aplicar la regla de la mano derecha, el vector resultante tienen dirección y sentido del vector k
r− , por lo tanto el vector producto vectorial será:
k 16BACrrrr
−=∧= Al mismo resultado habríamos llegado si resolvemos el determinante:
ir
jr
kr
=∧ BArr
4 3 0 = k 16k)3620(rr
−=− 12 5 0
Y el área del triángulo que forman los vectores es:
2u 82
16
2
BAuloAreaTriáng ==
∧=
rr
(Con u2 queremos indicar unidades cuadradas, ya que no sabemos en que están medidas las divisiones de los ejes)

MOMENTO DE UN VECTOR RESPECTO DE UN PUNTO Imagina el vector r
r que tiene su origen en el punto O y su extremo en cualquier lugar
del vector Ar
. El momento del vector Ar
respecto de un punto O es por definición igual al producto vectorial de Ar
rr∧
ArMrrr
∧= El módulo del momento, teniendo en cuenta que se trata de un producto vectorial, será:
d Asen A rM =α=
El ángulo α es el ángulo que forma el vector rr
con el vector Ar
. Fíjate en la figura. En el triángulo rectángulo en amarillo, la hipotenusa es el módulo del vector r
r y uno de los
catetos es d, que representa la distancia más corta del punto O al vector Ar
.
α=α−π= sen r)(sen rd donde se ha tenido en cuenta que el α=α−π sen)(sen Así que finalmente podemos poner que d Asen A rM =α= Ejemplo: Una puerta tiene 1 m de ancha. Si ejerces una fuerza de 20 N en el borde, calcula el momento de la fuerza respecto de las bisagras en los siguientes casos: a) Cuando la fuerza forme un ángulo de 90º respecto de la puerta b) Cuando forme un ángulo de 37º con la puerta c) Cuando la fuerza tenga la misma dirección que la puerta. El momento de que la fuerza ejerce respecto de las bisagras es α= sen F rM así que según el ángulo que forme la fuerza con la puerta tendremos:
a) mN 2090sen201sen F rM ⋅=⋅⋅=α= b) mN 1237sen201sen F rM ⋅=⋅⋅=α= c) 00sen201sen F rM =⋅⋅=α=

Como ves, no es la fuerza aplicada a una puerta la responsable de que gire, sino el momento que provoca la fuerza. Ya sabes por experiencia que cuando tienes que cerrar una puerta, en especial si es muy pesada, que:
• Siempre le empujas en el borde, porque de esa forma haces que el módulo de rr
sea mayor y por tanto el momento de la fuerza
• Siempre procuras empujarle en dirección perpendicular a la fuerza para que el seno del ángulo sea máximo.
• Nunca se te ocurriría empujarle en la dirección de la puerta. Sabes que así por mucha fuerza que realices nunca la vas a mover, porque 00sen = y el momento nulo.
TEOREMA DE VARIGNON Dice que en un sistema de fuerzas concurrentes el momento de la fuerza resultante, respecto de un punto, es igual a la suma de los momentos de cada fuerza, referidos naturalmente al mismo punto. (Es evidente que el teorema es válido no solo para el vector fuerza sino para cualquier tipo de vector.)
321 MMMMvvvv
++=
la demostración es muy simple:
M Fr ) FFF(r FrFrFr MMMM 321321321
vrrrrrrrrrrrrvvvv=∧=++∧=∧+∧+∧=++=
Ejemplo: Para subir un cubo de agua que pesa 100 N utilizamos una polea de 20 cm de radio y ejercemos al otro lado una fuerza de 150 N. Calcular el momento que hace girar la polea.
La fuerza resultante, puesto que una polea ideal simplemente modifica la dirección de la fuerza, es de 50 N. De acuerdo al teorema de Varignon, el momento del sistema será igual al momento de la fuerza resultante, por tanto:
mN 10502,0F rM R ⋅=⋅== También podemos calcular el momento de cada fuerza por separado y sumarlos. (teniendo en cuenta que son vectores): mN 101002,01502,0M ⋅=⋅−⋅= El signo menos del segundo momento es debido a que produce un giro en sentido contrario al primero. Recuerda que se trata de vectores.
DERIVADA DE UN VECTOR Como muy bien sabes, la derivada de una constante es nula, por lo tanto para que un vector admita derivada es preciso que varíe respecto del escalar al que se deriva. En muchos casos, en física, los vectores van a variar con respecto al tiempo, en otras
palabras son vectores que dependen del tiempo y representaremos como )t(Ar
o
simplemente Ar
pero sin olvidar que dependen del tiempo, por ejemplo: j4it3Arrr
+= Antes de continuar es muy importante recordar que un vector se compone de módulo, dirección y sentido, y que por lo tanto éste puede variar respecto al escalar, en módulo o en dirección o en ambas cosas a la vez, y que en todos los casos admitiría derivada.
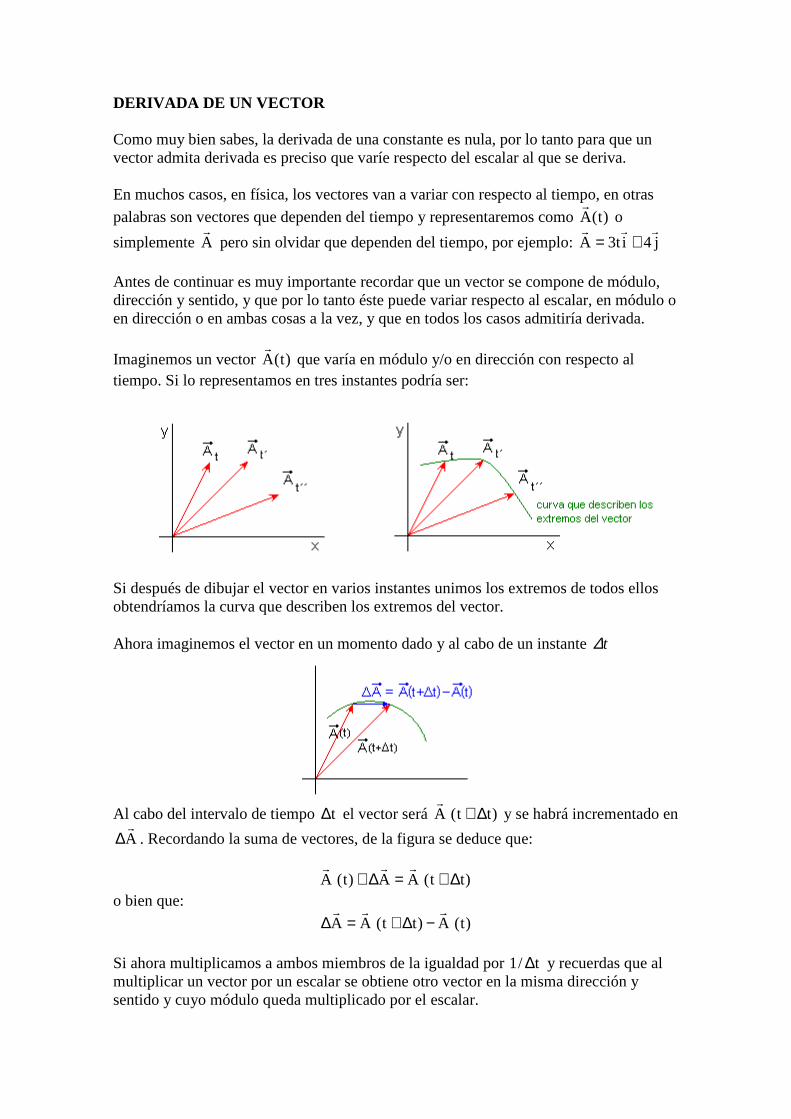
Imaginemos un vector )t(Ar
que varía en módulo y/o en dirección con respecto al tiempo. Si lo representamos en tres instantes podría ser:
Si después de dibujar el vector en varios instantes unimos los extremos de todos ellos obtendríamos la curva que describen los extremos del vector. Ahora imaginemos el vector en un momento dado y al cabo de un instante t∆
Al cabo del intervalo de tiempo t∆ el vector será )tt (A ∆+
r y se habrá incrementado en
Ar
∆ . Recordando la suma de vectores, de la figura se deduce que:
)tt (AA)t (A ∆+=∆+rrr
o bien que:
)t (A)tt (AArrr
−∆+=∆ Si ahora multiplicamos a ambos miembros de la igualdad por t/1∆ y recuerdas que al multiplicar un vector por un escalar se obtiene otro vector en la misma dirección y sentido y cuyo módulo queda multiplicado por el escalar.

Si t∆ es un intervalo pequeño su inversa será grande, por tanto t/A ∆∆r
será un vector
en la misma dirección y sentido que Ar
∆ , pero con un módulo mayor:
t
)t (A)tt (A
t
A
∆−∆+=
∆∆
rrr
Si t∆ lo hacemos cada vez menor y menor, sería como tomar límites a la expresión anterior cuando t∆ tiende a cero, tendremos lo que por definición es la derivada:
dt
Ad
t
)t (A)tt (Alim
t
Alim 0t0t
rrrr
=∆
−∆+=∆∆
→∆→∆
Imagina que si el intervalo de tiempo t∆ lo vamos tomando cada vez más pequeño
(puesto que tiende a cero) entonces el vector t/A ∆∆r
va siendo cada vez más tangente a la curva que describen los extremos del vector. Justamente en el límite, cuando 0t →∆ , el vector será tangente a la curva:
“La derivada de un vector respecto de un escalar es otro vector, cuya dirección es la tangente a la curva que describen los extremos del vector sin derivar, y cuyas componentes son las derivadas de las componentes del vector.”
kdt
dAj
dt
dAi
dt
dA
dt
Ad zyxrrr
r
++=
En la figura se representa el vector en dos instantes y su derivada en esos instantes. Como puedes ver es tangente a la curva que describen los extremos del vector-
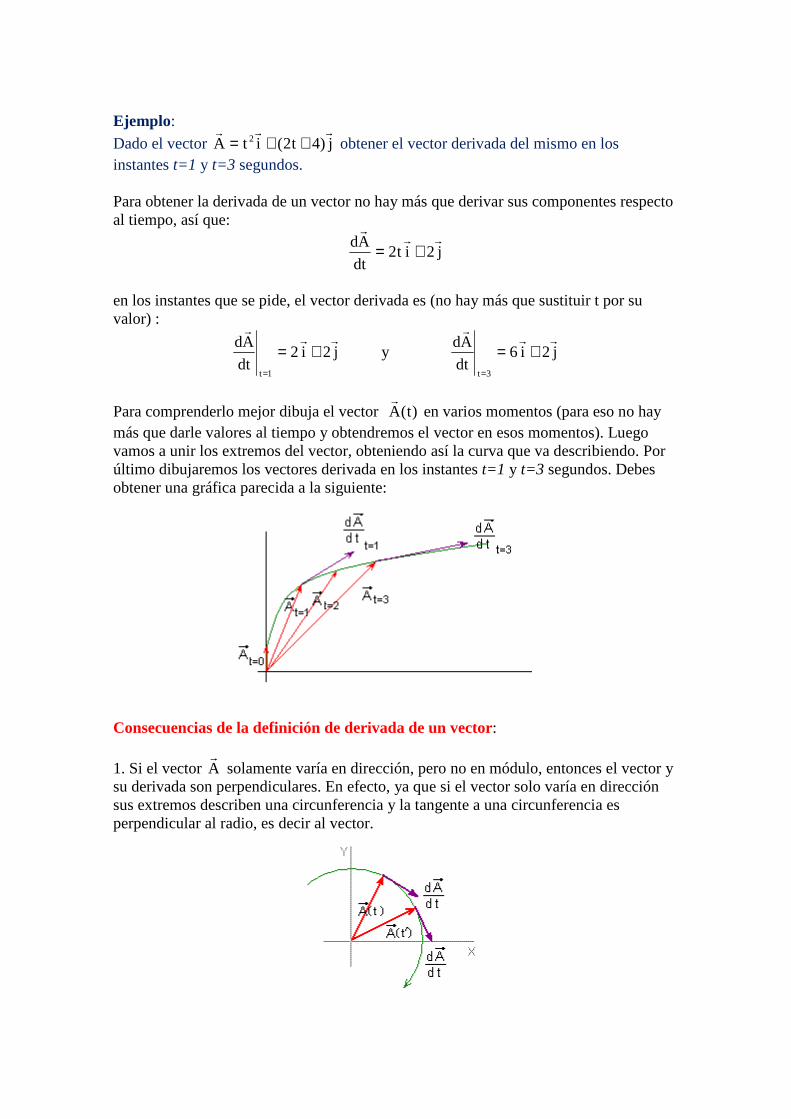
Ejemplo:
Dado el vector j)4t2(itA 2rrr
++= obtener el vector derivada del mismo en los instantes t=1 y t=3 segundos. Para obtener la derivada de un vector no hay más que derivar sus componentes respecto al tiempo, así que:
j2i t2dt
Ad rrr
+=
en los instantes que se pide, el vector derivada es (no hay más que sustituir t por su valor) :
j2i 2dt
Ad
1t
rrr
+==
y j2i 6dt
Ad
3t
rrr
+==
Para comprenderlo mejor dibuja el vector )t(Ar
en varios momentos (para eso no hay más que darle valores al tiempo y obtendremos el vector en esos momentos). Luego vamos a unir los extremos del vector, obteniendo así la curva que va describiendo. Por último dibujaremos los vectores derivada en los instantes t=1 y t=3 segundos. Debes obtener una gráfica parecida a la siguiente:
Consecuencias de la definición de derivada de un vector: 1. Si el vector A
r solamente varía en dirección, pero no en módulo, entonces el vector y
su derivada son perpendiculares. En efecto, ya que si el vector solo varía en dirección sus extremos describen una circunferencia y la tangente a una circunferencia es perpendicular al radio, es decir al vector.

2. Si el vector A
r solamente varía en módulo, pero no en dirección, entonces el vector y
su derivada son paralelos. En efecto, pues si el vector no varía en dirección sus extremos describen una recta, la que los contiene, y la tangente a una recta es otra recta montada sobre ella.
3. Teniendo en cuenta que un vector puede expresarse en función de su vector unitario de la forma:
AuAArr
⋅= si derivamos esa expresión. (Se hace exactamente igual que si se deriva un producto cualquiera, es decir, sería la derivada del primero por el segundo sin derivar más el primero sin derivar por la derivada del segundo.)
dt
udAu
dt
dA
dt
Ad AA
rr
r
+=
La derivada de un vector puede descomponerse en dos vectores:
• El primer sumando es un vector en la dirección y sentido de Ar
. Efectivamente, ya que tiene la dirección y sentido de su vector unitario.
• El segundo sumando es un vector normal al vector Ar
. Efectivamente, ya que se trata de la derivada de un vector unitario y por tanto solo puede variar en dirección, y, como hemos razonado anteriormente, un vector que solo varía en dirección y su derivada son perpendiculares.

Ejemplo: ¿En qué casos la derivada del módulo coincide con el módulo de la derivada de un vector? Si te paras a leer este trabalenguas hasta entender lo que dice, verás que en realidad es una tontería. Veamos, un vector puede expresarse como:
AuAArr
⋅= si derivamos:
dt
udAu
dt
dA
dt
Ad AA
rr
r
+=
es evidente que, en general, el módulo de la derivada y la derivada del módulo de un vector son diferentes:
dt
dA
dt
Ad ≠r
Solamente serán iguales cuando el segundo sumando de la igualdad sea nulo, y lo será si:
• 0A = , es decir si se trata de un vector nulo.
• 0dt
ud A =r
eso sucederá si el vector unitario Aur
es constante porque en tal caso su
derivada será nula, es decir, sucederá si no cambia en dirección, puesto que su módulo siempre vale 1.
• Por tanto la conclusión es que, la derivada de un vector coincide con el módulo de la derivada, cuando el vector A
r sea nulo o bien solo cambie en módulo, pero
no en dirección.