mecanismos y elementos de máquinas mecanismos y sistemas ... sistema biela... · motores...
TRANSCRIPT
Área Departamental Aeronáutica
Facultad de Ingeniería
Universidad Nacional de La Plata
Mecanismos y Elementos de Máquinas –
Mecanismos y Sistemas de Aeronaves
Pablo L. Ringegni
Revisión 6
La Plata 2018
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 2
Índice
MECANISMOS Y ELEMENTOS DE MÁQUINAS – MECANISMOS Y SISTEMAS DE AERONAVES .............................................................................................................. 1
Índice 2
SISTEMA BIELA-MANIVELA 3
Desplazamiento lineal (x) del pistón en función del ángulo............................................................................. 3 Velocidad del pistón. .......................................................................................................................................... 4 Aceleración del pistón. ....................................................................................................................................... 5
DESPLAZAMIENTO, VELOCIDAD Y ACELERACIÓN DE UN PUNTO CUALQUIERA DE BIELA. 8 Desplazamiento. ................................................................................................................................................. 8 Velocidad. ........................................................................................................................................................... 9 Aceleración. ........................................................................................................................................................ 9
CINEMÁTICA DE LA MANIVELA 10 Desplazamiento del punto C: ............................................................................................................................ 10 Velocidad del punto C: ..................................................................................................................................... 10 Aceleración del punto C: .................................................................................................................................. 10
MODELIZACIÓN DEL SISTEMA BIELA MANIVELA 11 Modelización del pistón:................................................................................................................................... 11 Modelización de la manivela: ........................................................................................................................... 12 Modelización de la biela: .................................................................................................................................. 12
Modelo dinámicamente equivalente 13
Modelo práctico o aproximado 14
ESTUDIO DE FUERZAS EN EL SISTEMA BIELA –MANIVELA. DIMENSIONADO PRELIMINAR
DE SUS COMPONENTES 16 Componente Perno de Pistón ............................................................................................................................ 17 Componente Biela ............................................................................................................................................ 18 Componente Muñón de manivela ..................................................................................................................... 19 Componente manivela ...................................................................................................................................... 20 Análisis de reacciones en los vínculos .............................................................................................................. 21 Análisis en las paredes del pistón ..................................................................................................................... 22 Diagrama del par motor .................................................................................................................................... 23
Bibliografía 24
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 3
SISTEMA BIELA-MANIVELA
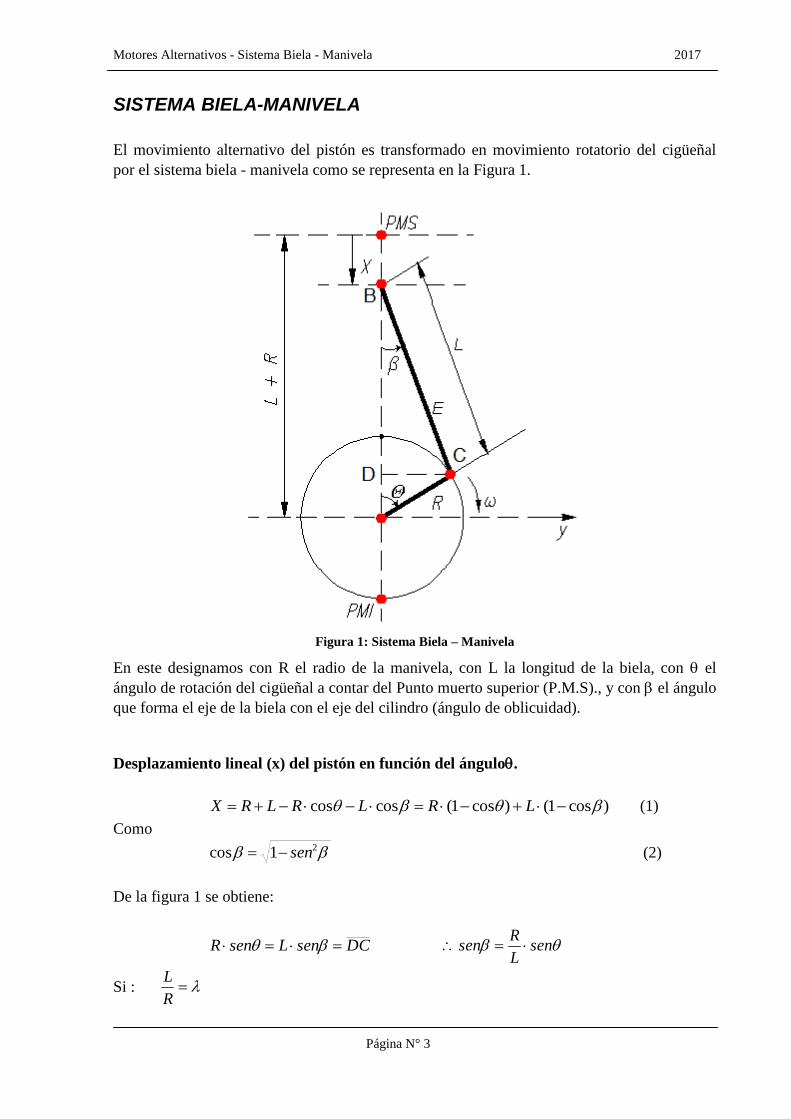
El movimiento alternativo del pistón es transformado en movimiento rotatorio del cigüeñal
por el sistema biela - manivela como se representa en la Figura 1.
Figura 1: Sistema Biela – Manivela
En este designamos con R el radio de la manivela, con L la longitud de la biela, con el
ángulo de rotación del cigüeñal a contar del Punto muerto superior (P.M.S)., y con el ángulo
que forma el eje de la biela con el eje del cilindro (ángulo de oblicuidad).
Desplazamiento lineal (x) del pistón en función del ángulo.
)cos1()cos1(coscos LRLRLRX (1)
Como
21cos sen (2)
De la figura 1 se obtiene:
DCsenLsenR senL
Rsen
Si : R
L

Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 4
Se tiene:
sensen 1
Reemplazando en (2) tenemos:
xaeequivalentFunciónsensen 1:1
11cos 2
2
2
Desarrollando en serie y tomando los dos primeros términos tenemos:
21...
42211
2 xxxx
Entonces se tiene que:
2
2
2
2
2 4
2cos11
2
111
11cos
senxsen
Reemplazando en (1) tenemos:
)2cos1(4
1)cos1(
)2cos1(4
)cos1(2
RX
LRX
Velocidad del pistón.
La velocidad del pistón está dada por:
d
dx
dt
d
d
dx
dt
dxX
22
1sensenRX
Donde: 60
2 n
rad/seg
La velocidad máxima del pistón se obtiene cuando:
0
dt
Xd o bien 0
dt
d
d
Xd
0)2cos1
(cos2
Rdt
Xd
O sea, cuando:
0)2cos1
(cos
Y tomando:
1cos22cos 2

Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 5
Tenemos:
0)1cos2(1
cos 2
2
1
44cos
2
max
U
En la práctica, la velocidad máxima del pistón se obtiene con suficiente aproximación cuando
la biela y la manivela son perpendiculares entre sí. Se obtiene entonces de la Figura 1 que:
11
max
tgR
LtgU
Quedando para este caso práctico la velocidad máxima:
11 22
1tgsentgsenRX
Aceleración del pistón.
La aceleración del pistón la podemos obtener considerando:
)2cos1
(cos2
RX
d
Xd
dt
d
d
Xd
dt
XdX
La aceleración máxima se obtiene tomando d/dt = 0, o sea:
0)22
(3
sensenRdt
d
Como: cos22 sensen
Tendremos: 0)cos4
1(3
senR
dt
d
O sea, cuando: 0)cos4
1(
sen
Se cumple esto cuando:
sen = 0 o bien
cos = - /4

Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 6
La primera solución (sen = 0) corresponde a = 0 o =
Es decir en los puntos muertos superior e inferior.
El valor de la aceleración para estos ángulos será:
)1
1(2
01
R (máxima) PMS
)1
1(2
2
R (mínima) PMI
La segunda solución (cos = - /4) corresponde a una aceleración cuyo valor es el
siguiente:
1
8
116
2
4
)1cos2
(cos)2cos1
(cos
2
2
2
222
3
RR
RR
1
8
2
3 R es un mínimo.
Consideremos los dos mínimos existentes:
)1
1(2
2
R
1
8
2
3 R
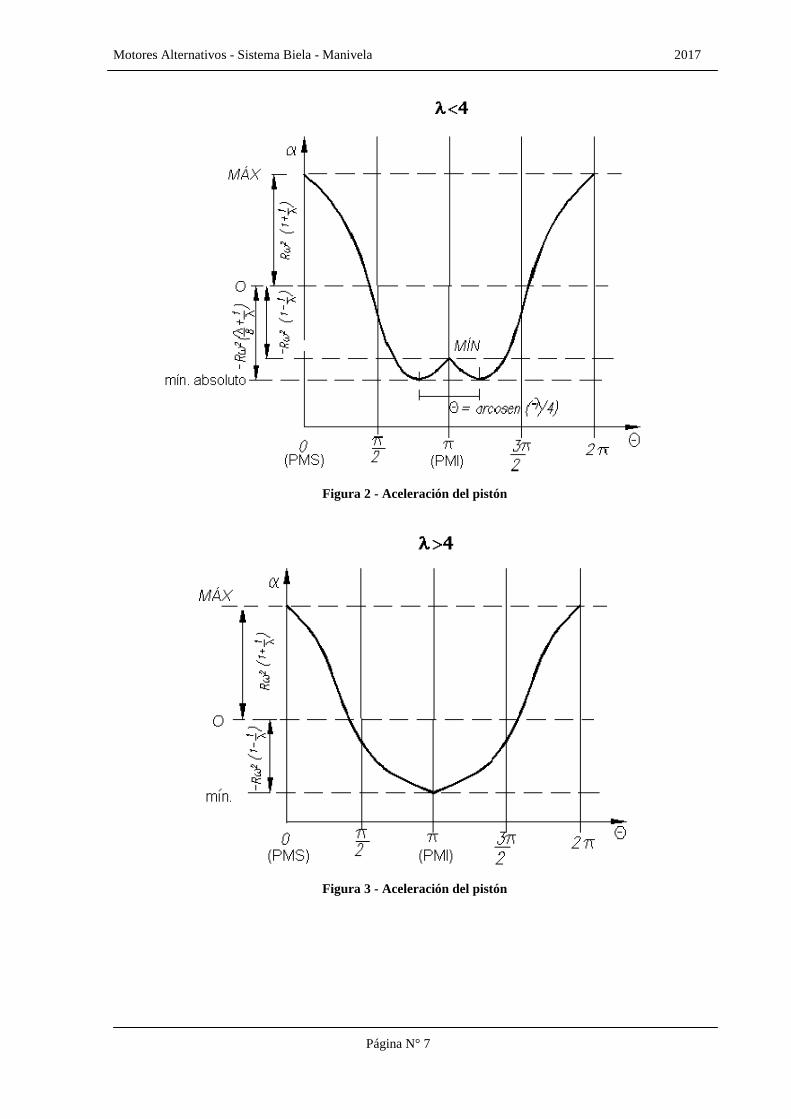
* Si = 4 tenemos que 2 = 3 existe un solo mínimo.
* Cuando 4 el valor mínimo corresponde a:
1
8
2R
y se alcanza dos veces, una antes del P.M.I. y otra después del P.M.I. (ver Figura 2).
* Cuando 4 no es posible que exista la solución cos = - /4, por lo tanto el valor mínimo
de la aceleración corresponde al P.M.I. y tiene un valor igual a:
)1
1(2
R
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 7
Figura 2 - Aceleración del pistón
Figura 3 - Aceleración del pistón
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 8
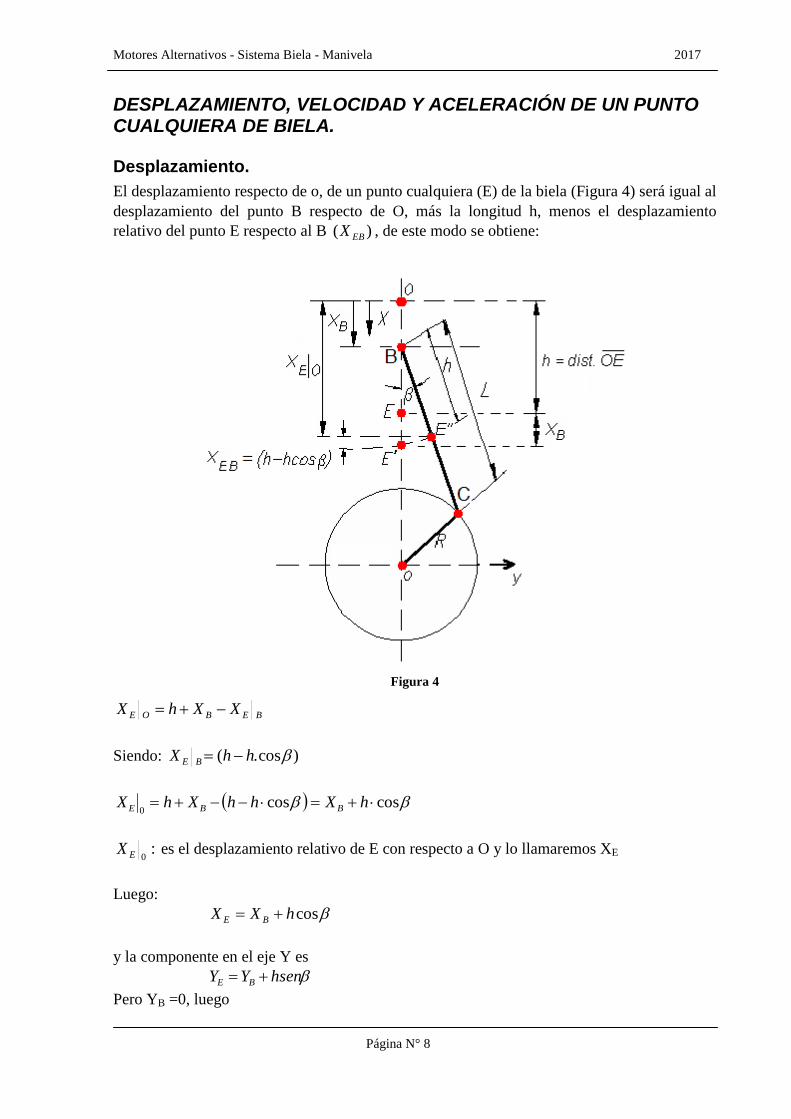
DESPLAZAMIENTO, VELOCIDAD Y ACELERACIÓN DE UN PUNTO CUALQUIERA DE BIELA.
Desplazamiento.
El desplazamiento respecto de o, de un punto cualquiera (E) de la biela (Figura 4) será igual al
desplazamiento del punto B respecto de O, más la longitud h, menos el desplazamiento
relativo del punto E respecto al B )( EBX , de este modo se obtiene:
Figura 4
BEBOE XXhX
Siendo: )cos.( hhX BE
coscos0
hXhhXhX BBE
:0EX es el desplazamiento relativo de E con respecto a O y lo llamaremos XE
Luego:
coshXX BE
y la componente en el eje Y es
hsenYY BE
Pero YB =0, luego

Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 9
hsenYE
Sustituyendo sen y cos de la igualdad:
2
22
2
2
2
2
2
4
2cos11cos
4
2cos1
2
...2
11cos
1
sen
sensen
sensen
Tenemos que:
senL
hRY
hL
hRX
E
E
)2cos1(1
4
1)cos1(
E = punto considerado de la biela si el pistón estuviera en PMS;
E’= punto E si la biela tuviera solamente movimiento hacia abajo (se cumple OE=BE’);
E’’= punto actual biela después del desplazamiento del pistón en su valor X y rotación de la
biela.
Velocidad.
Las dos componentes de la velocidad
X E EY
del punto E serán:
11 2
2
cos
E EE
E EE
dX dX d hX R sen sen
dt d dt L
dY dY d hY R
dt d dt L
Aceleración.
Las dos componentes Ex y E
y de la aceleración serán:
2
2
1cos 1 cos 2
E Ex
E
E Ey
E
d X d X d hR
dt d dt L
d Y d Y d hR sen
dt d dt L
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 10
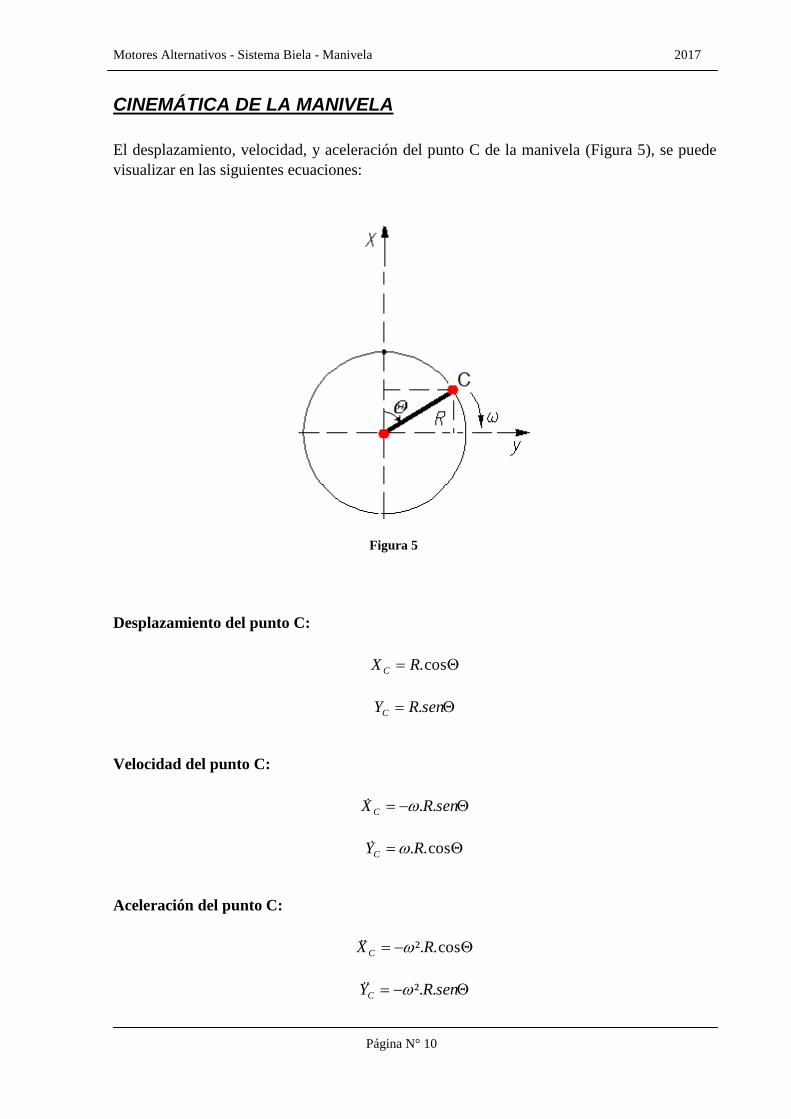
CINEMÁTICA DE LA MANIVELA
El desplazamiento, velocidad, y aceleración del punto C de la manivela (Figura 5), se puede
visualizar en las siguientes ecuaciones:
Figura 5
Desplazamiento del punto C:
cos.RX C
senRYC .
Velocidad del punto C:
senRX C ..
cos..RYC
Aceleración del punto C:
cos.².RX C
senRYC .².
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 11
MODELIZACIÓN DEL SISTEMA BIELA MANIVELA
Para efectuar un análisis de fuerzas dinámicas completo de cualquier mecanismo se necesitan
conocer las propiedades másicas (masa, centro de gravedad, momento de inercia) de los
eslabones móviles.
La manivela se encuentra en rotación pura y el pistón en traslación pura (figura 6). La biela
se encuentra con un movimiento complejo (rotación más traslación) y para efectuar un
análisis dinámico exacto se necesitaría determinar la aceleración lineal de su CG para todas
las posiciones, lo cual implicaría evaluar todas las secciones de la biela punto a punto, desde
el muñón que articula con el pistón, hasta el muñón que articula con la manivela. Por este
motivo, se presenta la necesidad de obtener un modelo de la biela que permita simplificar el
análisis dinámico por lo que a continuación se presentará dicho análisis. La misma necesidad
se plantea para el pistón y la manivela.
Se parte del análisis del sistema biela-manivela completo, analizando componente por
componente: pistón, manivela y biela.
Cabe destacar que se estudiará el caso en que el sistema biela manivela es un mecanismo que
tiene un movimiento de entrada rotacional en la manivela con velocidad angular constante y
genera un movimiento de salida rectilíneo alternativo del pistón
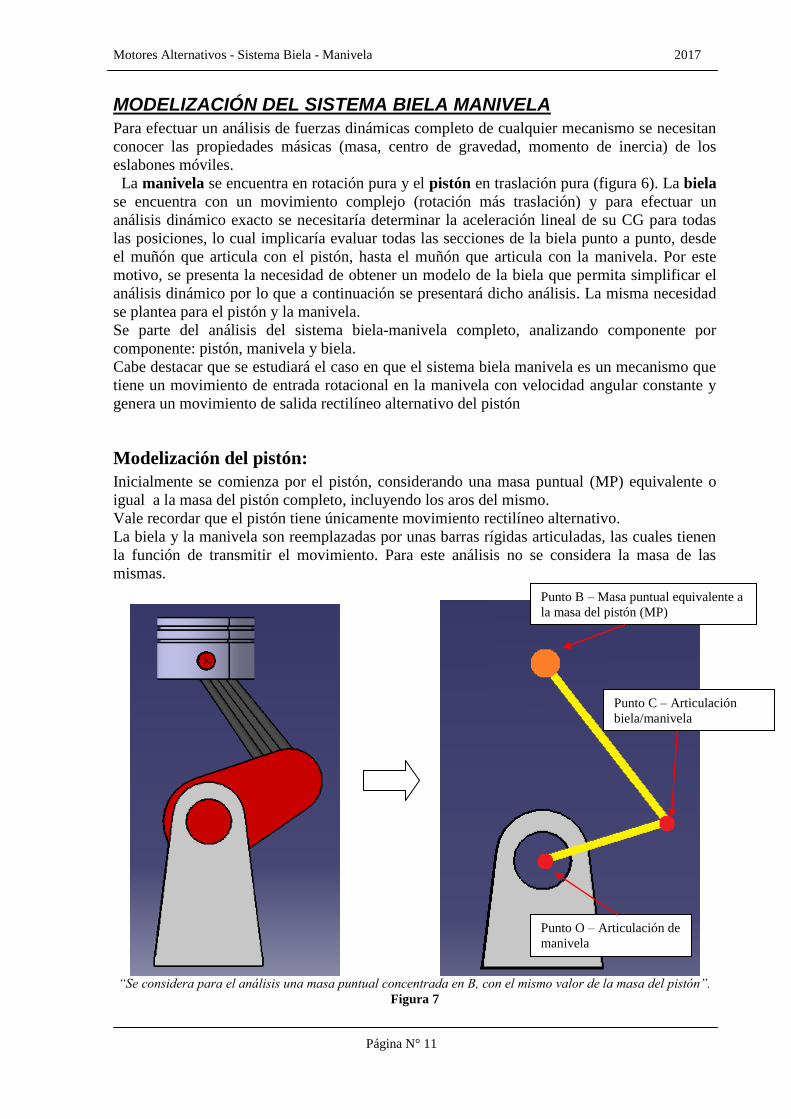
Modelización del pistón:
Inicialmente se comienza por el pistón, considerando una masa puntual (MP) equivalente o
igual a la masa del pistón completo, incluyendo los aros del mismo.
Vale recordar que el pistón tiene únicamente movimiento rectilíneo alternativo.
La biela y la manivela son reemplazadas por unas barras rígidas articuladas, las cuales tienen
la función de transmitir el movimiento. Para este análisis no se considera la masa de las
mismas.
“Se considera para el análisis una masa puntual concentrada en B, con el mismo valor de la masa del pistón”.
Figura 7
Punto B – Masa puntual equivalente a
la masa del pistón (MP)
Punto C – Articulación
biela/manivela
Punto O – Articulación de
manivela
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 12
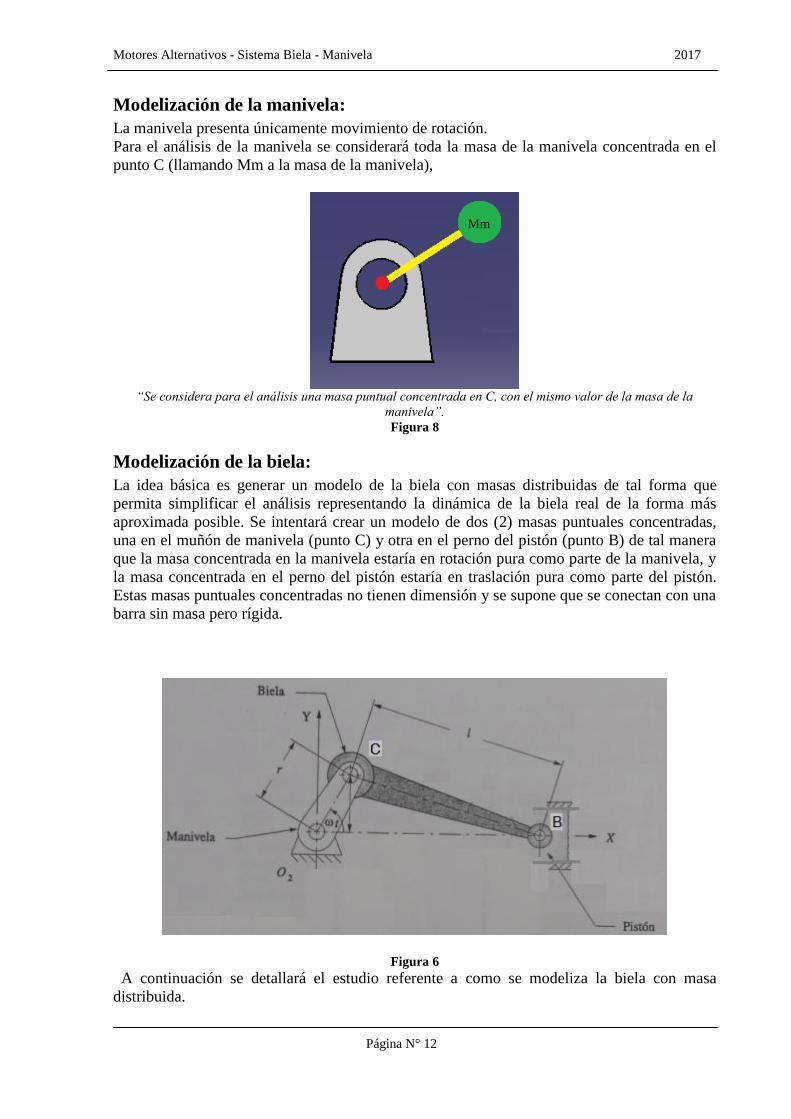
Modelización de la manivela:
La manivela presenta únicamente movimiento de rotación.
Para el análisis de la manivela se considerará toda la masa de la manivela concentrada en el
punto C (llamando Mm a la masa de la manivela),
“Se considera para el análisis una masa puntual concentrada en C, con el mismo valor de la masa de la
manivela”.
Figura 8
Modelización de la biela:
La idea básica es generar un modelo de la biela con masas distribuidas de tal forma que
permita simplificar el análisis representando la dinámica de la biela real de la forma más
aproximada posible. Se intentará crear un modelo de dos (2) masas puntuales concentradas,
una en el muñón de manivela (punto C) y otra en el perno del pistón (punto B) de tal manera
que la masa concentrada en la manivela estaría en rotación pura como parte de la manivela, y
la masa concentrada en el perno del pistón estaría en traslación pura como parte del pistón.
Estas masas puntuales concentradas no tienen dimensión y se supone que se conectan con una
barra sin masa pero rígida.
Figura 6
A continuación se detallará el estudio referente a como se modeliza la biela con masa
distribuida.
Mm
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 13
Modelo dinámicamente equivalente
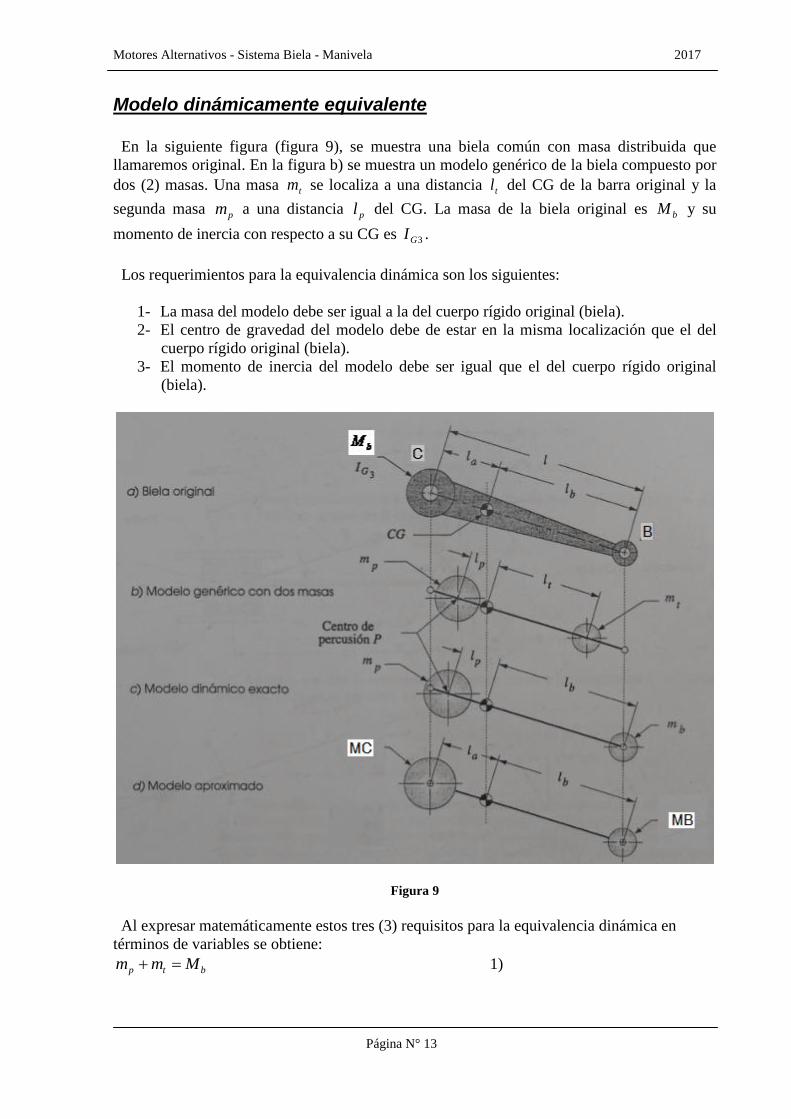
En la siguiente figura (figura 9), se muestra una biela común con masa distribuida que
llamaremos original. En la figura b) se muestra un modelo genérico de la biela compuesto por
dos (2) masas. Una masa tm se localiza a una distancia tl del CG de la barra original y la
segunda masa pm a una distancia pl del CG. La masa de la biela original es bM y su
momento de inercia con respecto a su CG es 3GI .
Los requerimientos para la equivalencia dinámica son los siguientes:
1- La masa del modelo debe ser igual a la del cuerpo rígido original (biela).
2- El centro de gravedad del modelo debe de estar en la misma localización que el del
cuerpo rígido original (biela).
3- El momento de inercia del modelo debe ser igual que el del cuerpo rígido original
(biela).
Figura 9
Al expresar matemáticamente estos tres (3) requisitos para la equivalencia dinámica en
términos de variables se obtiene:
btp Mmm 1)
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 14
ttpp lmlm .. 2)
3².². Gttpp Ilmlm 3)
Existen cuatro (4) incógnitas con tres (3) ecuaciones, pm , pl , tm , tl , por lo que se debe de
elegir un valor para cualquier variable a fin de resolver el sistema. Se elegirá la distancia tl
que será igual a la distancia del CG al perno del pistón, bl , como se ve en c). Esto colocará
una masa en una localización deseada, que es el perno del pistón y que está animado de
traslación. Al resolver las ecuaciones anteriores 1) y 2) se obtiene el valor de las masas
supuestas:
bp
bbp
ll
lMm
. 4)
bp
p
bbll
lMm
. 5)
Y sustituyendo estas expresiones de pm y bm en 3), se tiene una relación entre pl y
bl (ecuación 6), que es la que tiene que cumplir el modelo que se intenta construir para que el
mismo se comporte dinámicamente igual a la biela original:
bb
Gp
bpbGb
bp
p
bp
bp
bb
lM
Il
llMIlll
lMl
ll
lM
.
..²..²..
3
3
6)
Esta expresión 6) obtenida, representa en un cuerpo rígido, la relación entre la distancia del
centro de percusión al CG ( pl ) y la ubicación del centro de rotación percusiva ( bl ) (respecto
del CG) correspondiente. Es decir que la distancia pl es la localización del centro de percusión
correspondiente a un centro de rotación en bl , así que la segunda masa pm debe de colocarse
en el centro de percusión P del eslabón para obtener una equivalencia dinámica exacta junto
con las masas determinadas en 4) y 5).
Modelo práctico o aproximado
La configuración de la biela original es grande en el muñón de manivela y pequeña en el
extremo del perno del pistón. Esto coloca el CG cerca del extremo grande. El centro de
percusión P estará aún más cerca del extremo grande de lo que estaría el CG. Por esta razón se
puede colocar la segunda masa concentrada, que pertenece a P, en la manivela con un error
relativamente pequeño respecto al modelo dinámico. Este nuevo modelo práctico o
aproximado es adecuado para los cálculos de diseño preliminares.
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 15
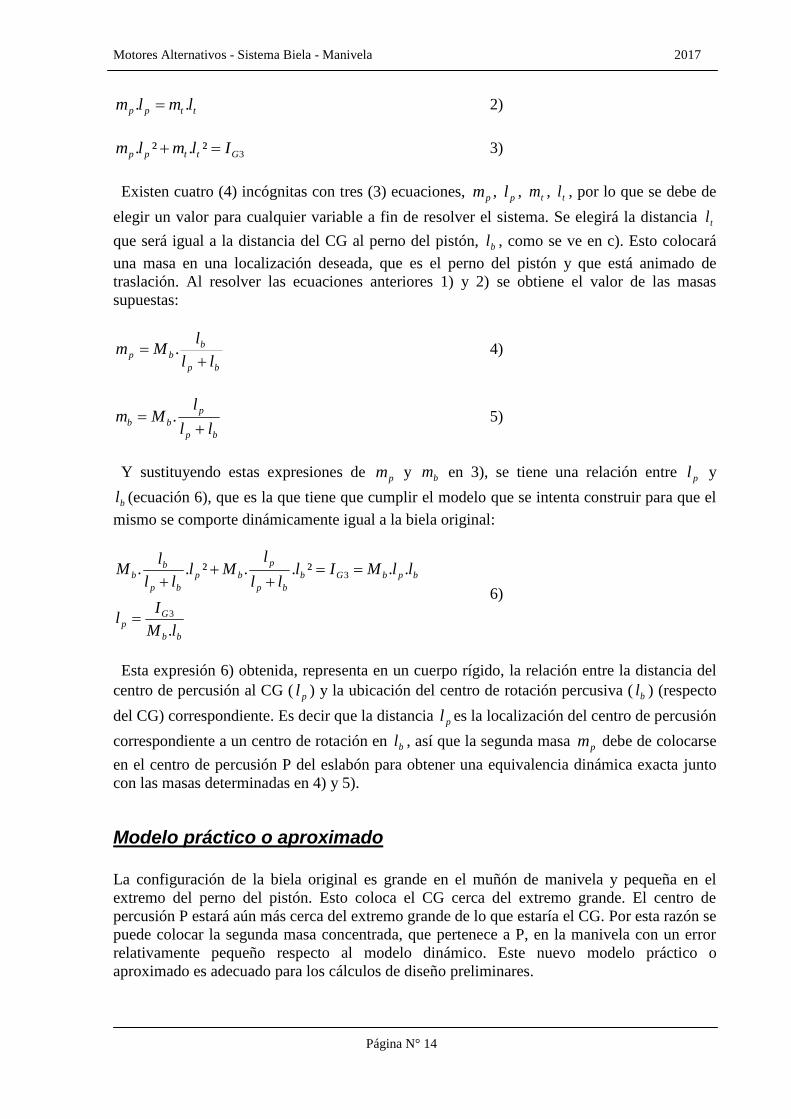
Al sustituir la distancia al por pl y llamando a las masas concentradas a esas distancias MC y
MB, se vuelven a escribir las ecuaciones como:
ap ll
ba
bb
ll
lMMC
.
ba
ab
ll
lMMB
.
Estas ecuaciones determinan la cantidad de la masa total de la biela que se debe de colocar en
cada extremo para modelar dinámicamente dicho eslabón en forma práctica o aproximada.
“Se considera para el análisis una masa puntual concentrada en B y otra en C, sumando ambas el valor de la
masa de la biela original”.
Figura 10
El momento de inercia para el modelo práctico o aproximado queda:
bab llMI ..2
Por lo tanto, aparece entre ambos modelos una diferencia de cuplas ( CC ) de valor:
senlllMIIC pabbCGC .
²)..(.).( 2
Punto B – Masa puntual equivalente a la
masa de la biela concentrada en B (MB).
Punto C – Masa puntual de la
biela concentrada en C (MC)
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 16
ESTUDIO DE FUERZAS EN EL SISTEMA BIELA –MANIVELA. DIMENSIONADO PRELIMINAR DE SUS COMPONENTES
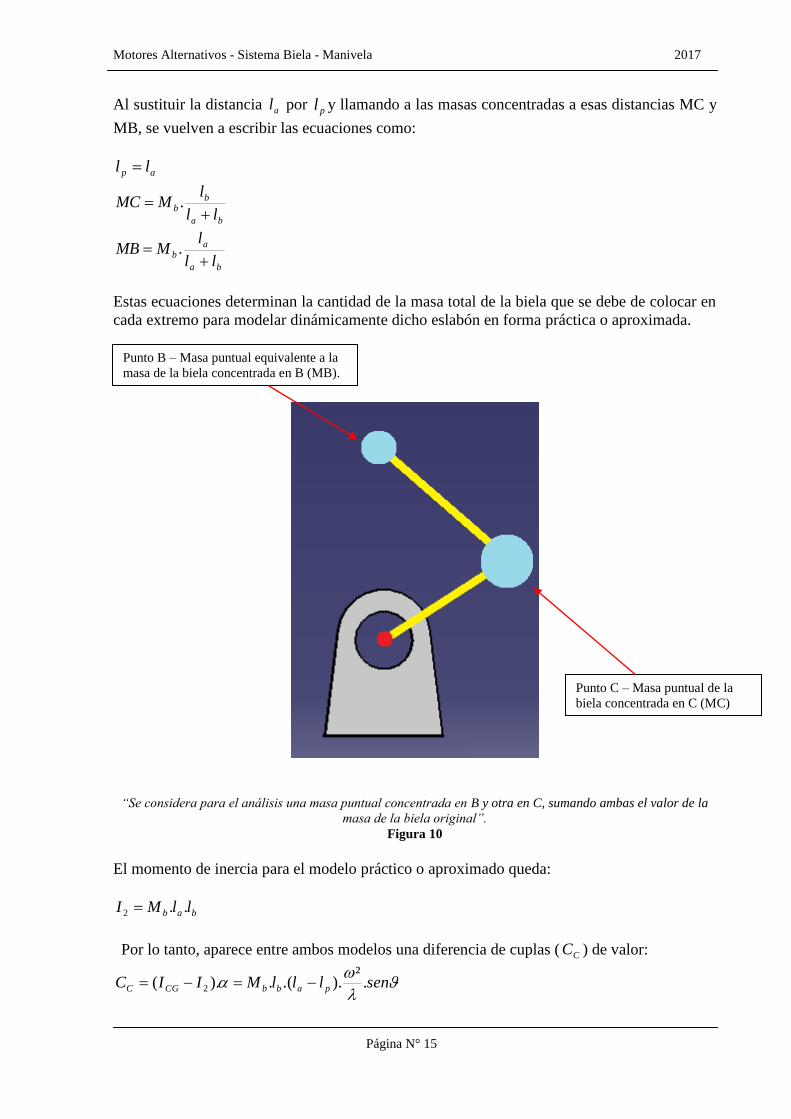
De acuerdo a lo visto anteriormente, el modelo práctico del sistema biela manivela queda:
Figura 11
donde:
MP: masa del pistón
MB: masa de la biela concentrada en el punto B.
MC: masa de la biela concentrada en el punto C.
:mcM masa de la manivela concentrada en C.
A continuación se realizará el dimensionado de los componentes del sistema:
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 17
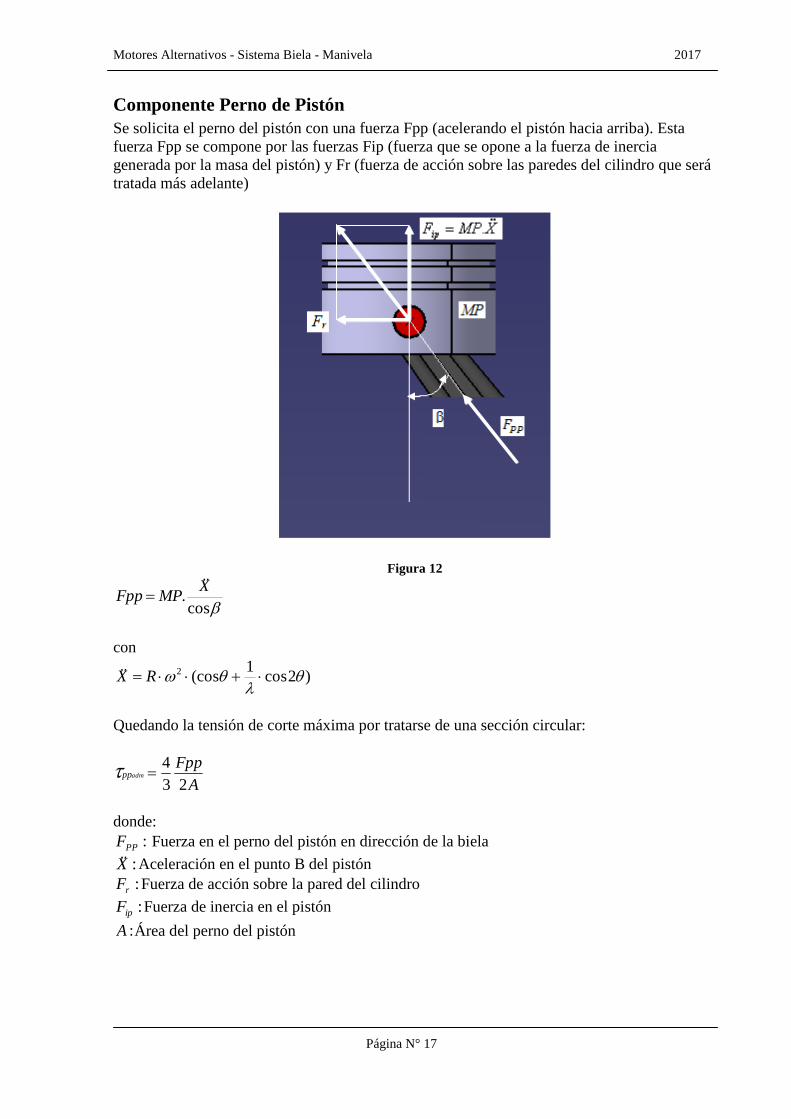
Componente Perno de Pistón
Se solicita el perno del pistón con una fuerza Fpp (acelerando el pistón hacia arriba). Esta
fuerza Fpp se compone por las fuerzas Fip (fuerza que se opone a la fuerza de inercia
generada por la masa del pistón) y Fr (fuerza de acción sobre las paredes del cilindro que será
tratada más adelante)
Figura 12
cos.
XMPFpp
con
)2cos1
(cos2
RX
Quedando la tensión de corte máxima por tratarse de una sección circular:
A
Fppadmpp
23
4
donde:
:PPF Fuerza en el perno del pistón en dirección de la biela
:X Aceleración en el punto B del pistón
:rF Fuerza de acción sobre la pared del cilindro
:ipF Fuerza de inercia en el pistón
:A Área del perno del pistón
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 18
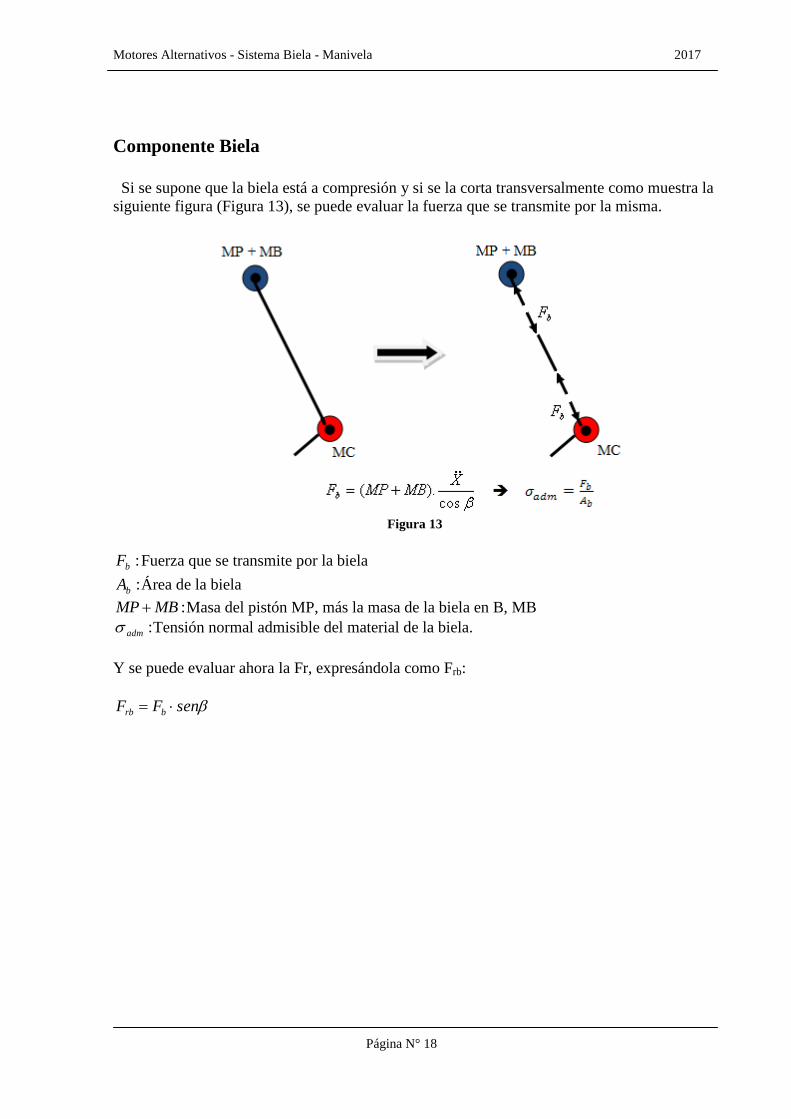
Componente Biela
Si se supone que la biela está a compresión y si se la corta transversalmente como muestra la
siguiente figura (Figura 13), se puede evaluar la fuerza que se transmite por la misma.
Figura 13
:bF Fuerza que se transmite por la biela
:bA Área de la biela
:MBMP Masa del pistón MP, más la masa de la biela en B, MB
:adm Tensión normal admisible del material de la biela.
Y se puede evaluar ahora la Fr, expresándola como Frb:
senFF brb

Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 19
Componente Muñón de manivela
Figura 14
:mmF Fuerza de reacción que actúa en el muñón de manivela (se resuelve x teorema del
coseno)
:mcF Fuerza de la masa de la biela en C, radial, debida a la rotación alrededor de O, dada por:
Fmc = MC R ω2
:bF Fuerza que se transmite por la biela hacia el muñón de la manivela
Si se descompone la Fmm en dirección radial y tangencial, el esquema de fuerzas queda:
Figura 15
Fb
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 20
donde:
Fmm =
:admmm Tensión de corte admisible del material del muñón de la manivela.
:r
bF Componente radial de Fb en la dirección radial de la manivela.
:t
bF Componente tangencial de Fb en la dirección perpendicular de la manivela.
:mmA Área del muñón de manivela.
)(. senFF b
t
b
)cos(. b
r
b FF
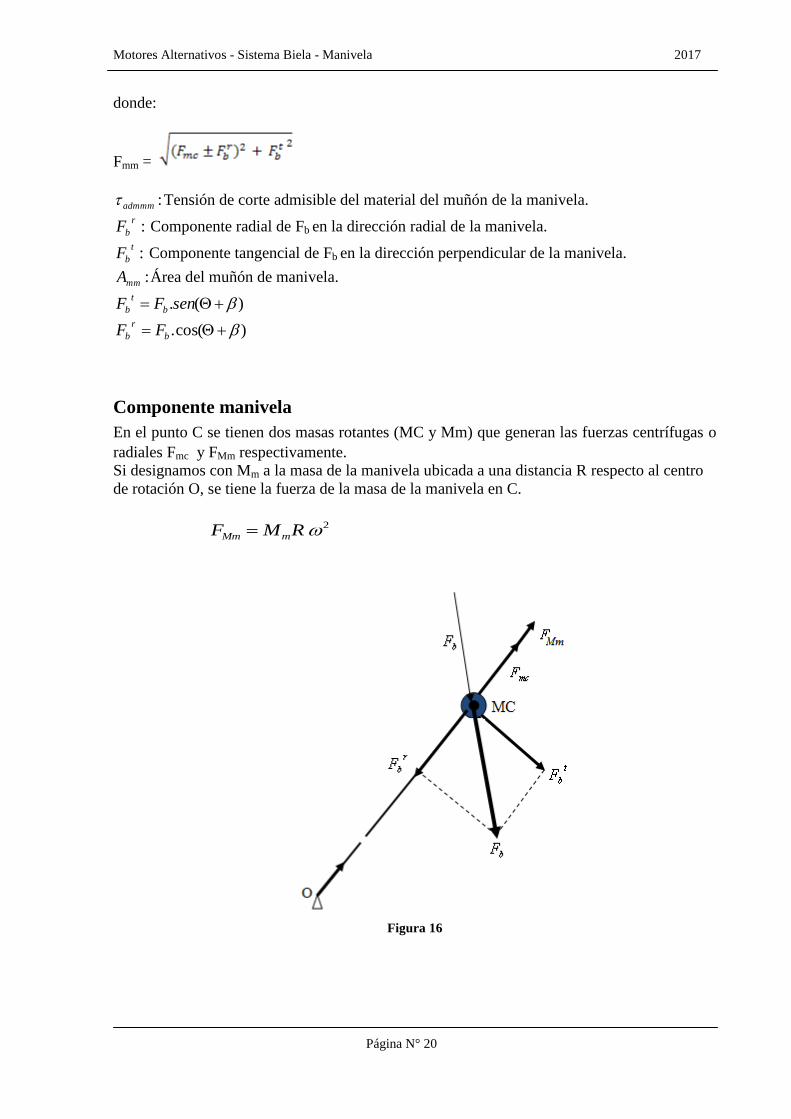
Componente manivela
En el punto C se tienen dos masas rotantes (MC y Mm) que generan las fuerzas centrífugas o
radiales Fmc y FMm respectivamente.
Si designamos con Mm a la masa de la manivela ubicada a una distancia R respecto al centro
de rotación O, se tiene la fuerza de la masa de la manivela en C.
2RMF mMm
Figura 16
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 21
En la manivela se presentan esfuerzos de tracción/compresión, de corte y de flexión que
generan las siguientes tensiones:
- m
r
bmcMm AFFFcompresióntracción /)(/
- JrmRFt
bflexión /)..(
- m
t
b AFcorte /)(
donde:
mA : Área de la manivela
rm: radio de la sección de la manivela
J : momento de inercia de la manivela
Para el dimensionado deberá usarse alguna hipótesis de rotura.
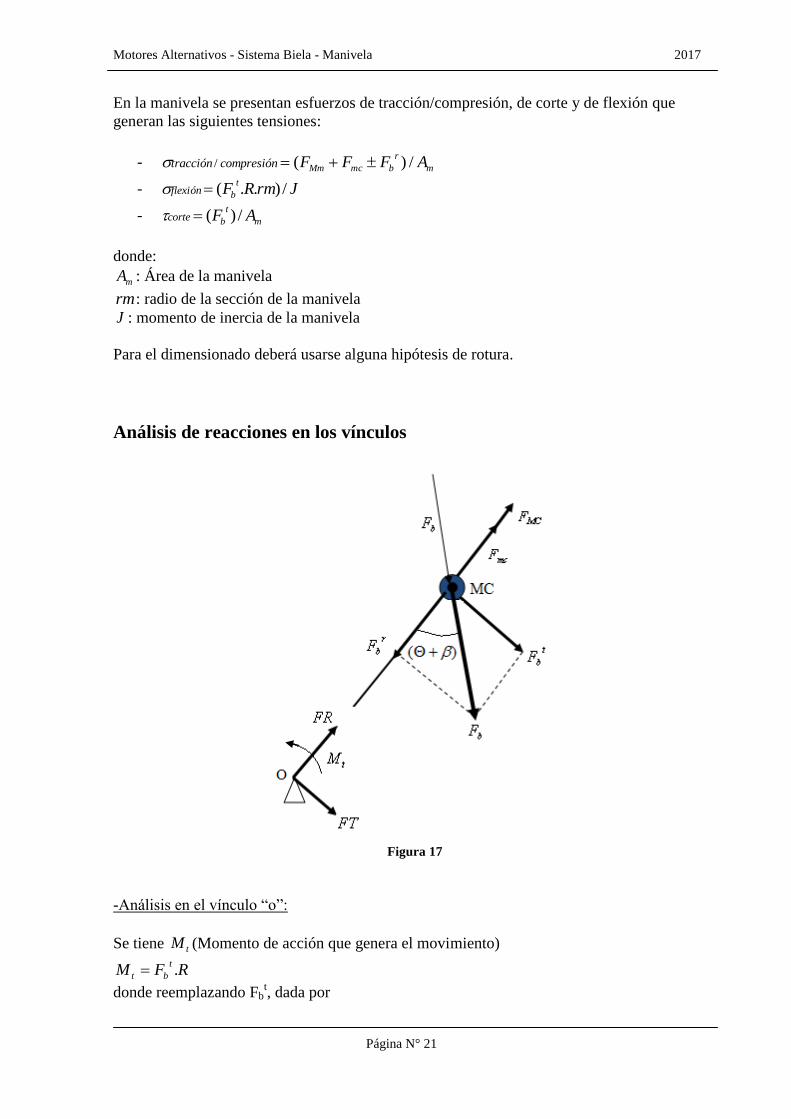
Análisis de reacciones en los vínculos
Figura 17
-Análisis en el vínculo “o”:
Se tiene tM (Momento de acción que genera el movimiento)
RFMt
bt .
donde reemplazando Fbt, dada por

Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 22
)(. senFF b
t
b
se obtiene:
)(.. senRFM bt
Las fuerzas de reacción se evalúan como:
cos.. FTsenFRRY en el vínculo en dirección Y
senFTFRRX .cos. en el vínculo en dirección X
Con:
)(r
bmcMC FFFFR Resultante de las fuerzas radiales en la articulación
FT = t
bF Fuerza en la articulación debido a esfuerzos tangenciales
Análisis en las paredes del pistón
Figura 18
senFF brb
cos..
senXMBMPFrb
tgXMBMPFrb ..
donde:
:rbF Fuerza de acción normal en las paredes del cilindro
Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 23
La componente rbF es tanto mayor cuanto mayor es el ángulo y es evidentemente la razón
de la pérdida de potencia causada por el rozamiento entre el pistón y la pared del cilindro.
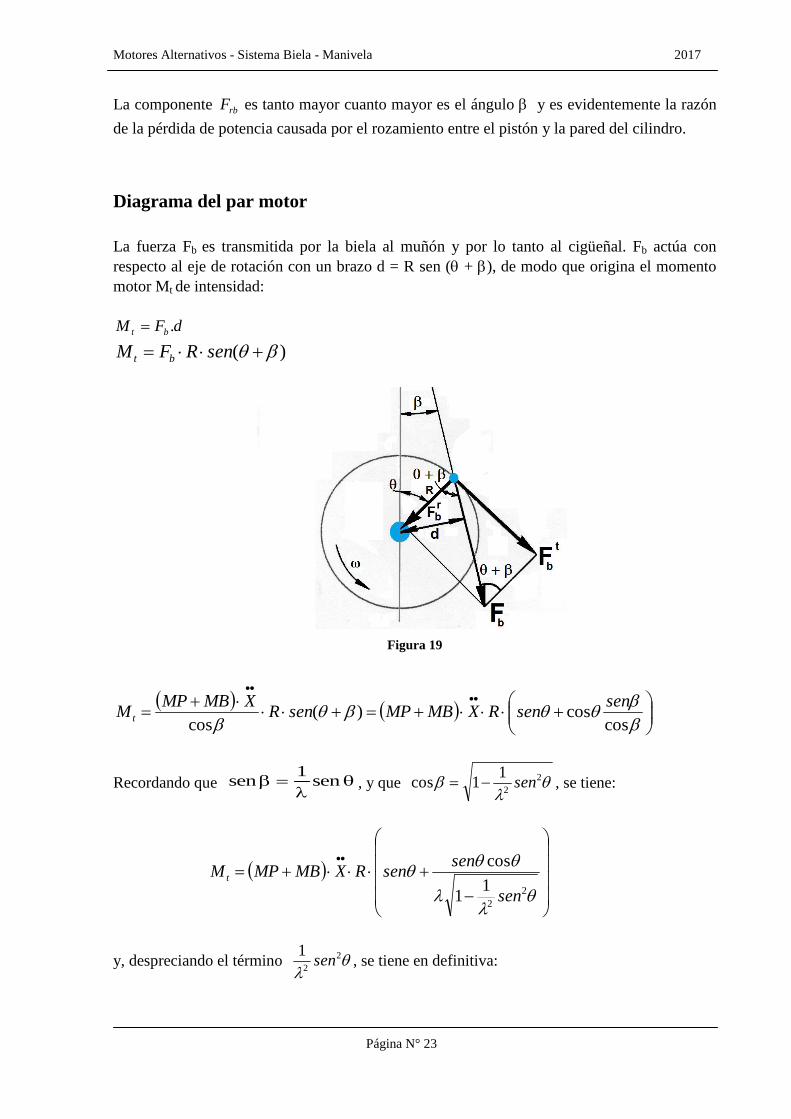
Diagrama del par motor
La fuerza Fb es transmitida por la biela al muñón y por lo tanto al cigüeñal. Fb actúa con
respecto al eje de rotación con un brazo d = R sen ( + ), de modo que origina el momento
motor Mt de intensidad:
dFM bt .
)( senRFM bt
Figura 19
coscos)(
cos
sensenRXMBMPsenR
XMBMPM t
Recordando que
sen1
sen , y que
2
2
11cos sen , se tiene:
2
2
11
cos
sen
sensenRXMBMPM t
y, despreciando el término
2
2
1sen , se tiene en definitiva:

Motores Alternativos - Sistema Biela - Manivela 2017
Página N° 24
22
1sensenRXMBMPM t
La misma expresión del momento motor puede obtenerse descomponiendo la fuerza Fb en una
componente radial Fbr y una tangencial Fb
t.
La primera, Fbr, evidentemente no contribuye al momento motriz, mientras la segunda, Fb
t,
actúa con un brazo R constante. El momento motriz vale:
RFM t
bt
De la figura se tiene inmediatamente:
)( senFF b
t
b
Y por lo tanto:
)( senRFM bt
De este modo se puede trazar en función de el diagrama del par motor Mt el cual se anula
para = 0 y = .
Bibliografía
- Manuales del Ingeniero Técnico. Motores Térmicos. Motores de pistón y turbinas a
gas. Günther Schneider
- Motori Endotermici. Dante Giacosa
- Diseño de Maquinaria. Robert L. Norton (Segunda Edición)
- Apunte de Cátedra de Motores (Dpto. Aeronáutica). Algunas partes están transcriptas
del mismo.