cinemática de una partícula - ingeniería electrónica ... · movimiento de los cuerpos sin...
TRANSCRIPT
1
Cinemática de una partícula
1. Introducción.
2. El movimiento.
a. Ecuación del movimiento.
b. Trayectoria.
c. La ecuación intrínseca del movimiento.
3. El vector Velocidad.
4. El vector Aceleración.
a. Componentes intrínsecas del vector aceleración.
5. Tipos de movimientos más representativos.
a. Movimientos rectilíneos.
b. Movimientos curvilíneos.
6. Composición de movimientos.
7. Transformaciones de Galileo.
2
1. Introducción
La CINEMÁTICA es la parte de la FÍSICA que se ocupa del estudio del movimiento de los cuerpos sin atender a las causas que lo produce.
En este tema estudiaremos la Cinemática de la Partícula o Punto Material.
Un análisis cinemático del movimiento es un estudio parcial del movimiento, pues supone considerar sólo sus características o propiedades.
Una PARTÍCULA o PUNTO MATERIAL es un ente físico dotado de masa pero sin dimensiones.
La aproximación del PUNTO MATERIAL es sólo válida cuando las dimensiones del cuerpo (móvil) son despreciables frente a las del movimiento general que estamos considerando.
3
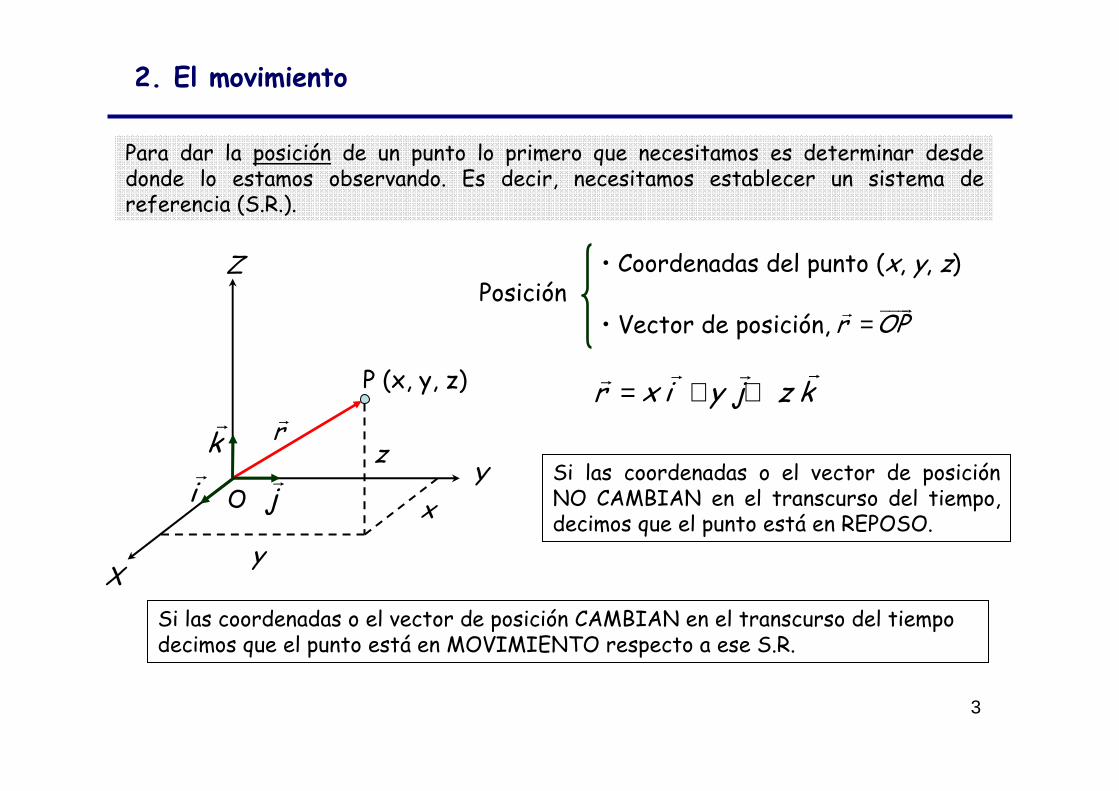
2. El movimiento
Para dar la posición de un punto lo primero que necesitamos es determinar desde donde lo estamos observando. Es decir, necesitamos establecer un sistema de referencia (S.R.).
O x
y
z
P (x, y, z)�
r
Posición• Coordenadas del punto (x, y, z)
• Vector de posición, r OP=�����
r x i y j z k= + +�� ��
i�
k�
j� Si las coordenadas o el vector de posición
NO CAMBIAN en el transcurso del tiempo, decimos que el punto está en REPOSO.
Si las coordenadas o el vector de posición CAMBIAN en el transcurso del tiempo decimos que el punto está en MOVIMIENTO respecto a ese S.R.
Z
Y
X
4
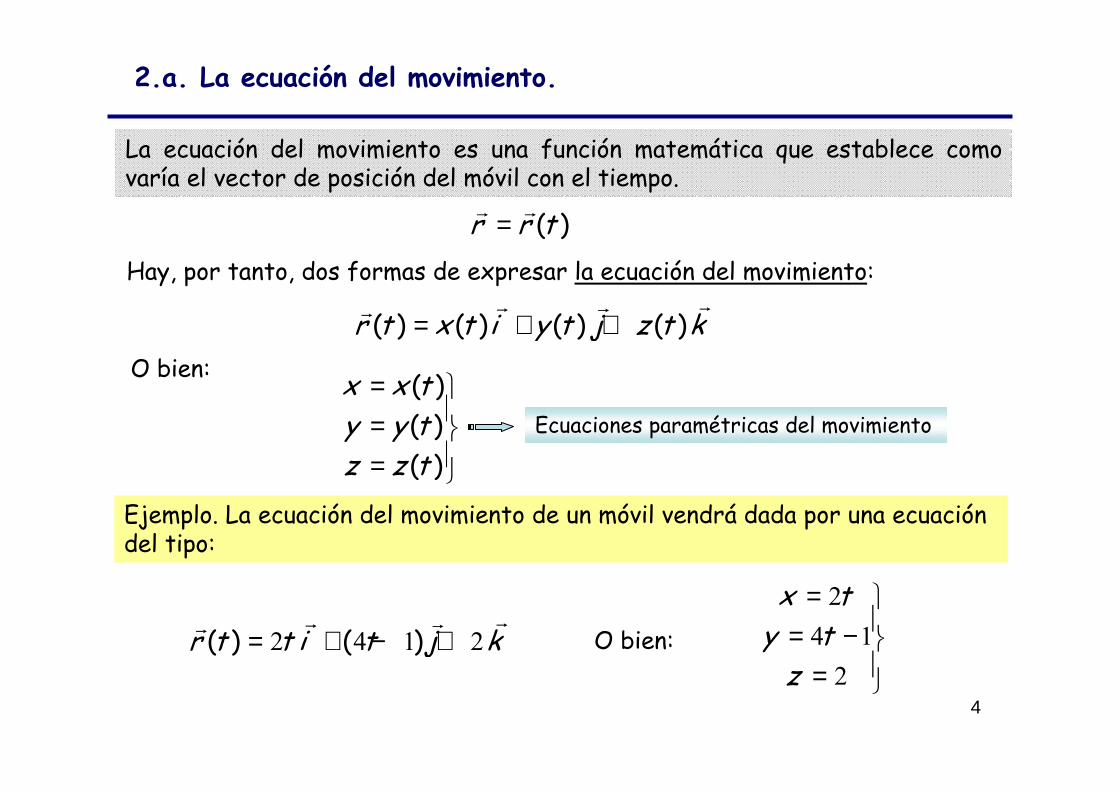
2.a. La ecuación del movimiento.
( )( )( )
x x ty y tz z t
= = =
Ecuaciones paramétricas del movimiento
La ecuación del movimiento es una función matemática que establece como varía el vector de posición del móvil con el tiempo.
Hay, por tanto, dos formas de expresar la ecuación del movimiento:
( ) ( ) ( ) ( )r t x t i y t j z t k= + +�� ��
O bien:
Ejemplo. La ecuación del movimiento de un móvil vendrá dada por una ecuación del tipo:
2 4 1 2( ) ( )r t t i t j k= + − +�� ��
O bien:
2
4 1
2
x ty tz
= = − =
=� �
( )r r t
5
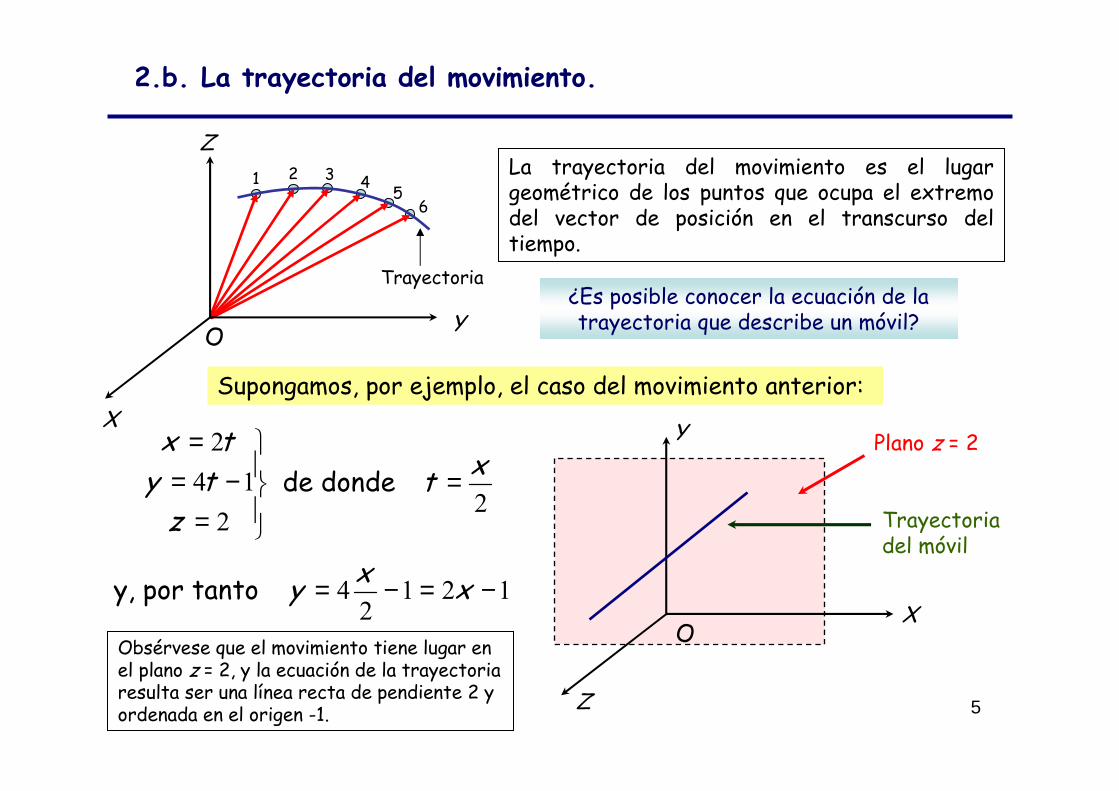
2.b. La trayectoria del movimiento.
1 2 3 45
6
La trayectoria del movimiento es el lugar geométrico de los puntos que ocupa el extremo del vector de posición en el transcurso del tiempo.
Trayectoria
X
Y
Z
O
¿Es posible conocer la ecuación de la trayectoria que describe un móvil?
Supongamos, por ejemplo, el caso del movimiento anterior:
2
4 1
2
x ty tz
= = − =
2=de donde xt
X
Plano z = 2
Trayectoria del móvil
4 1 2 12
= − = −y, por tanto xy x
Z
Y
OObsérvese que el movimiento tiene lugar en el plano z = 2, y la ecuación de la trayectoria resulta ser una línea recta de pendiente 2 y ordenada en el origen -1.
6
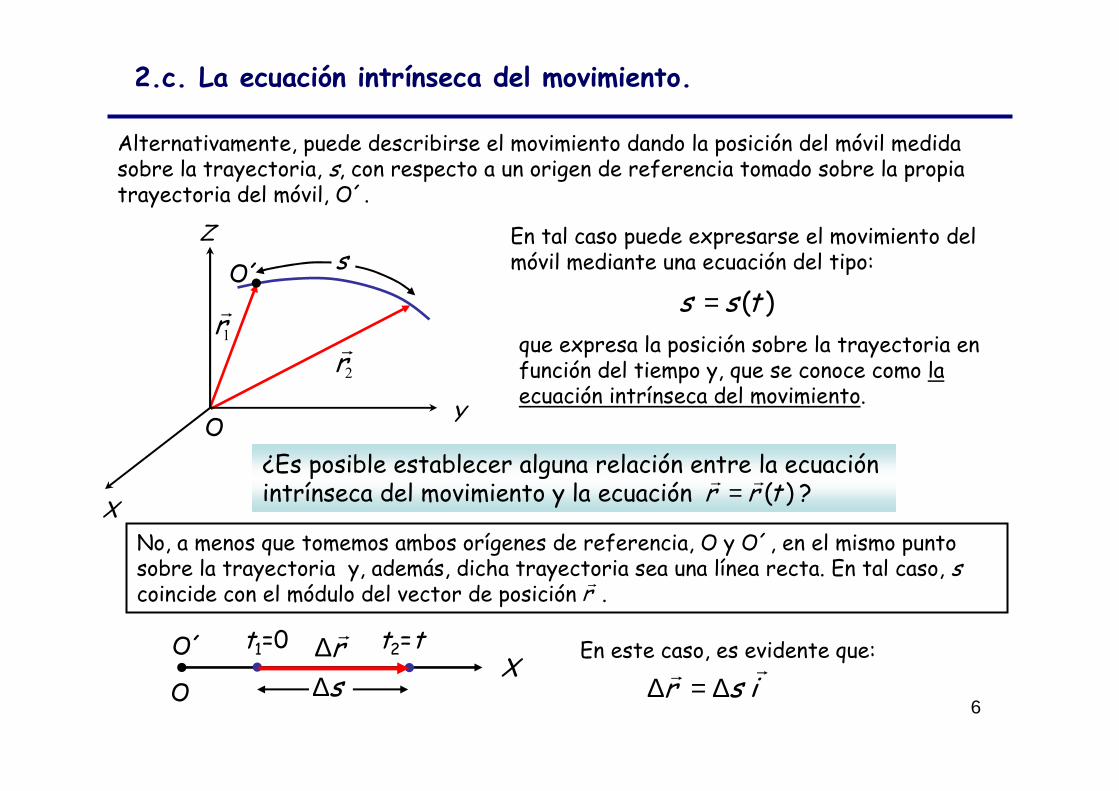
2.c. La ecuación intrínseca del movimiento.
Alternativamente, puede describirse el movimiento dando la posición del móvil medida sobre la trayectoria, s, con respecto a un origen de referencia tomado sobre la propia trayectoria del móvil, O´.
X
Y
Z
O
O´ s
1
�r2
�r
En tal caso puede expresarse el movimiento del móvil mediante una ecuación del tipo:
= ( )s s tque expresa la posición sobre la trayectoria en función del tiempo y, que se conoce como la ecuación intrínseca del movimiento.
¿Es posible establecer alguna relación entre la ecuación intrínseca del movimiento y la ecuación ?=
� �
( )r r t
No, a menos que tomemos ambos orígenes de referencia, O y O´, en el mismo punto sobre la trayectoria y, además, dicha trayectoria sea una línea recta. En tal caso, scoincide con el módulo del vector de posición .
�
r
O´
OX
t1=0 t2=t∆�r
∆sEn este caso, es evidente que:
∆ = ∆��r s i
7
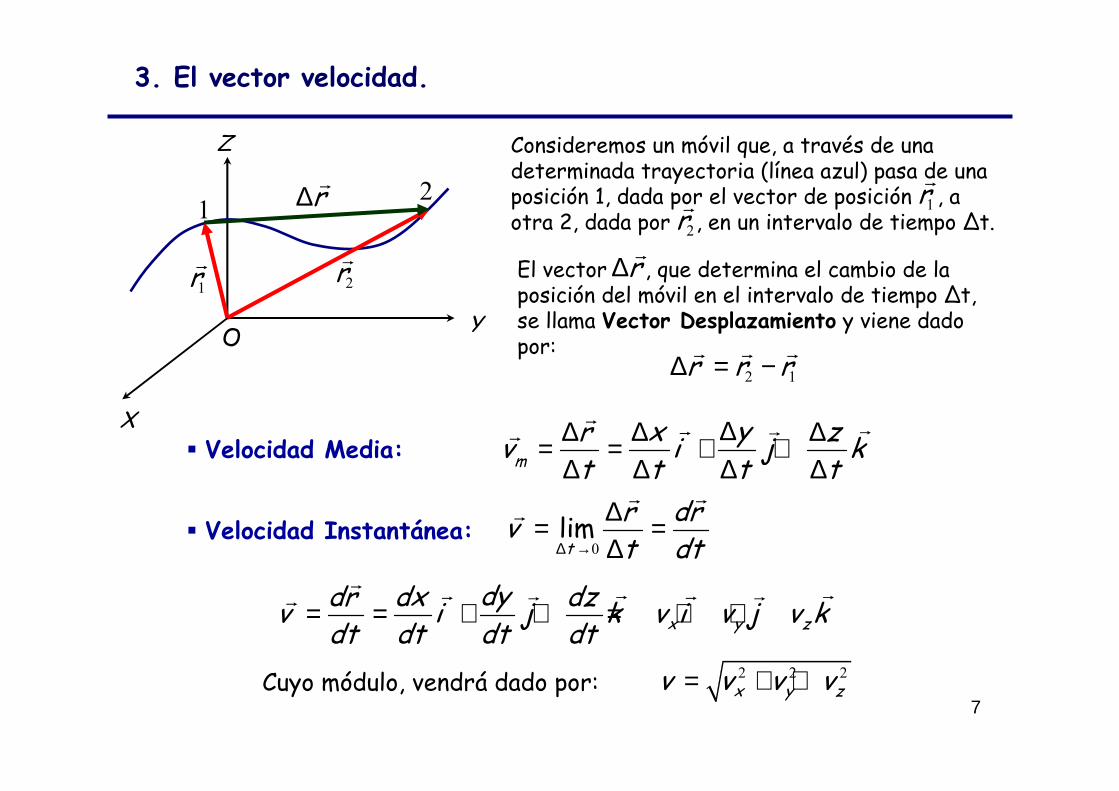
3. El vector velocidad.
X
Y
Z
O
1
�r 2
�r
∆�r
12
Consideremos un móvil que, a través de una determinada trayectoria (línea azul) pasa de una posición 1, dada por el vector de posición , a otra 2, dada por , en un intervalo de tiempo ∆t.2
�r1
�r
El vector , que determina el cambio de la posición del móvil en el intervalo de tiempo ∆t, se llama Vector Desplazamiento y viene dado por:
∆�r
2 1∆ = −� � �r r r
� Velocidad Media:∆∆ ∆ ∆= = + +
∆ ∆ ∆ ∆
��� ��
myr x zv i j k
t t t t
� Velocidad Instantánea:0∆ →
∆= =∆
� �
�
limt
r drvt dt
= = + + = + +�
� �� �� ��
x y zdydr dx dzv i j k v i v j v k
dt dt dt dt
Cuyo módulo, vendrá dado por: 2 2 2= + +x y zv v v v
8
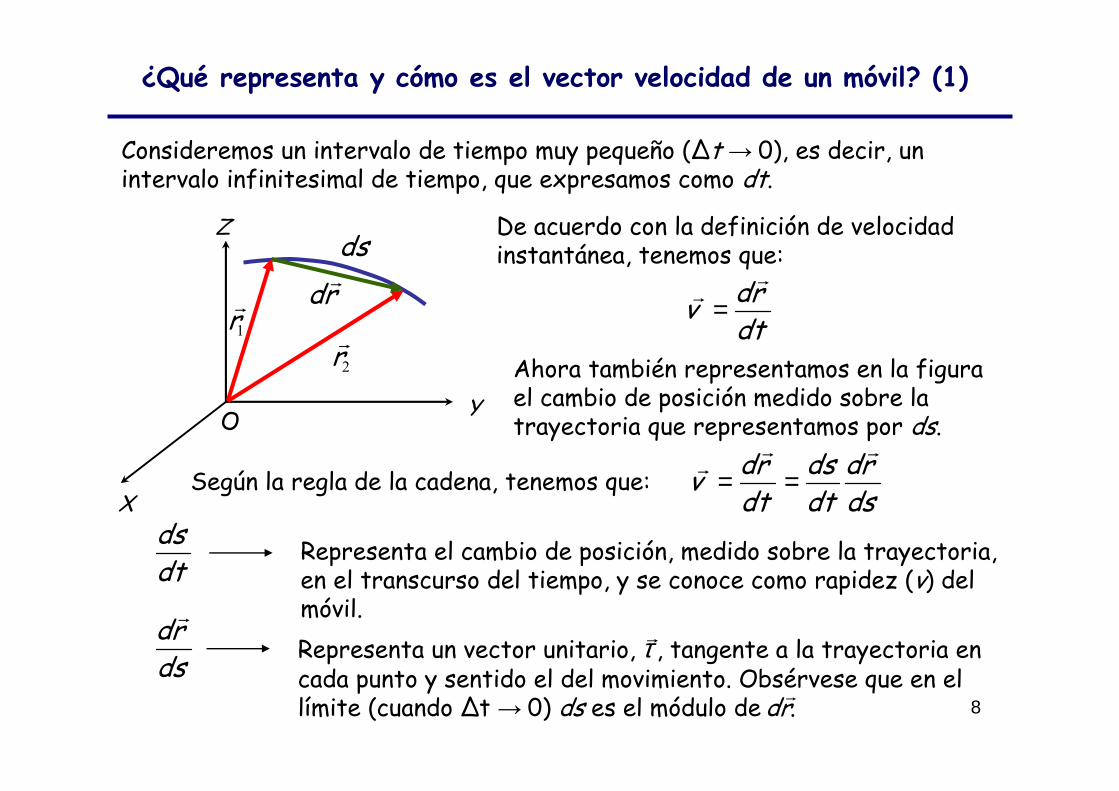
¿Qué representa y cómo es el vector velocidad de un móvil? (1)
Consideremos un intervalo de tiempo muy pequeño (∆t → 0), es decir, un intervalo infinitesimal de tiempo, que expresamos como dt.
=�
� drvdt
X
Y
Z
O
1
�r2
�r
�dr
dsDe acuerdo con la definición de velocidad instantánea, tenemos que:
Ahora también representamos en la figura el cambio de posición medido sobre la trayectoria que representamos por ds.
= =� �
� dr ds drvdt dt ds
Según la regla de la cadena, tenemos que:
dsdt
Representa el cambio de posición, medido sobre la trayectoria, en el transcurso del tiempo, y se conoce como rapidez (v) del móvil.�
drds
Representa un vector unitario, , tangente a la trayectoria en cada punto y sentido el del movimiento. Obsérvese que en el límite (cuando ∆t → 0) ds es el módulo de .
�
dr
τ�
9
¿Qué representa y cómo es el vector velocidad de un móvil? (2)
X
Y
Z
O
1
�r2
�r
�dr
ds
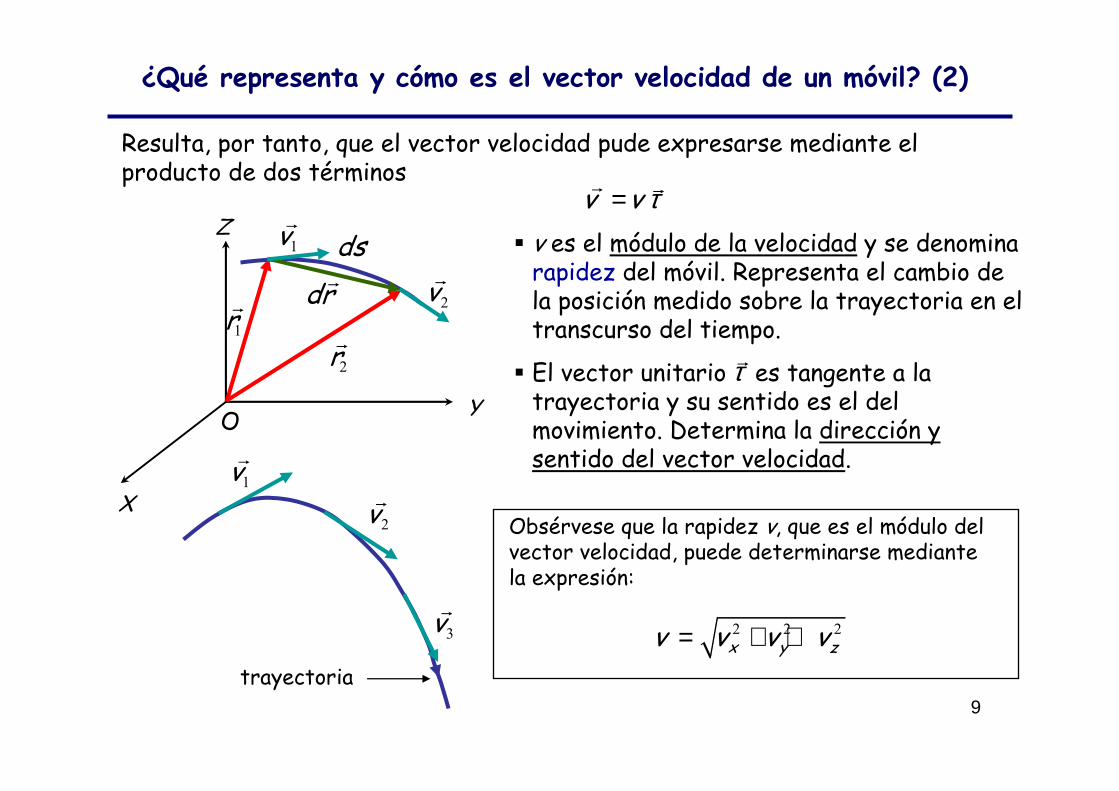
Resulta, por tanto, que el vector velocidad pude expresarse mediante el producto de dos términos
τ=� �v v
� v es el módulo de la velocidad y se denomina rapidez del móvil. Representa el cambio de la posición medido sobre la trayectoria en el transcurso del tiempo.
� El vector unitario es tangente a la trayectoria y su sentido es el del movimiento. Determina la dirección y sentido del vector velocidad.
τ�
2
�v
3
�v
1
�v
2
�v
1
�v
trayectoria
Obsérvese que la rapidez v, que es el módulo del vector velocidad, puede determinarse mediante la expresión:
2 2 2= + +x y zv v v v
10
4. El vector aceleración.
1
�r2
�r
�dr
ds1
�v
2
�v 1
�v
X
Y
Z
O
2
�v ∆�v
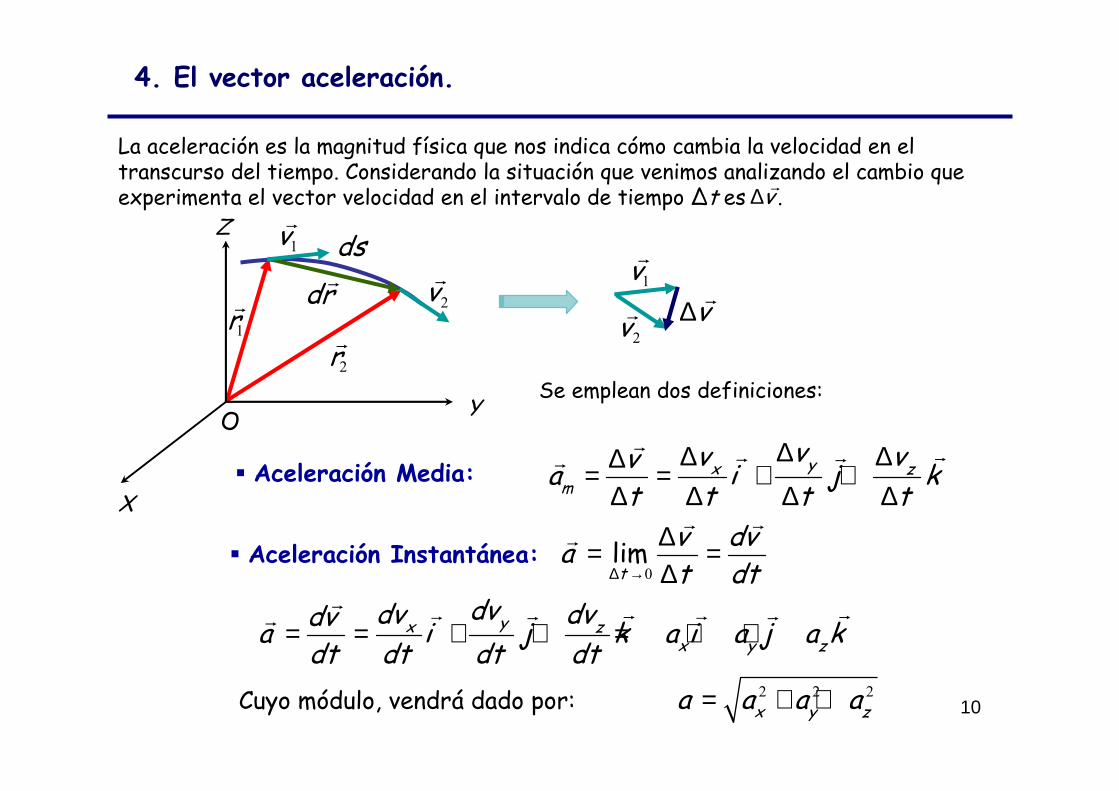
La aceleración es la magnitud física que nos indica cómo cambia la velocidad en el transcurso del tiempo. Considerando la situación que venimos analizando el cambio que experimenta el vector velocidad en el intervalo de tiempo ∆t es . ∆
�
v
� Aceleración Media:∆∆ ∆∆= = + +
∆ ∆ ∆ ∆
��� �� yx z
m
vv vva i j k
t t t t
Se emplean dos definiciones:
� Aceleración Instantánea:0∆ →
∆= =∆
� �
�
limt
v dva
t dt
= = + + = + +�
� �� �� �� yx zx y z
dvdv dvdva i j k a i a j a k
dt dt dt dt
Cuyo módulo, vendrá dado por: 2 2 2= + +x y za a a a
11
4a. Componentes intrínsecas del vector aceleración.
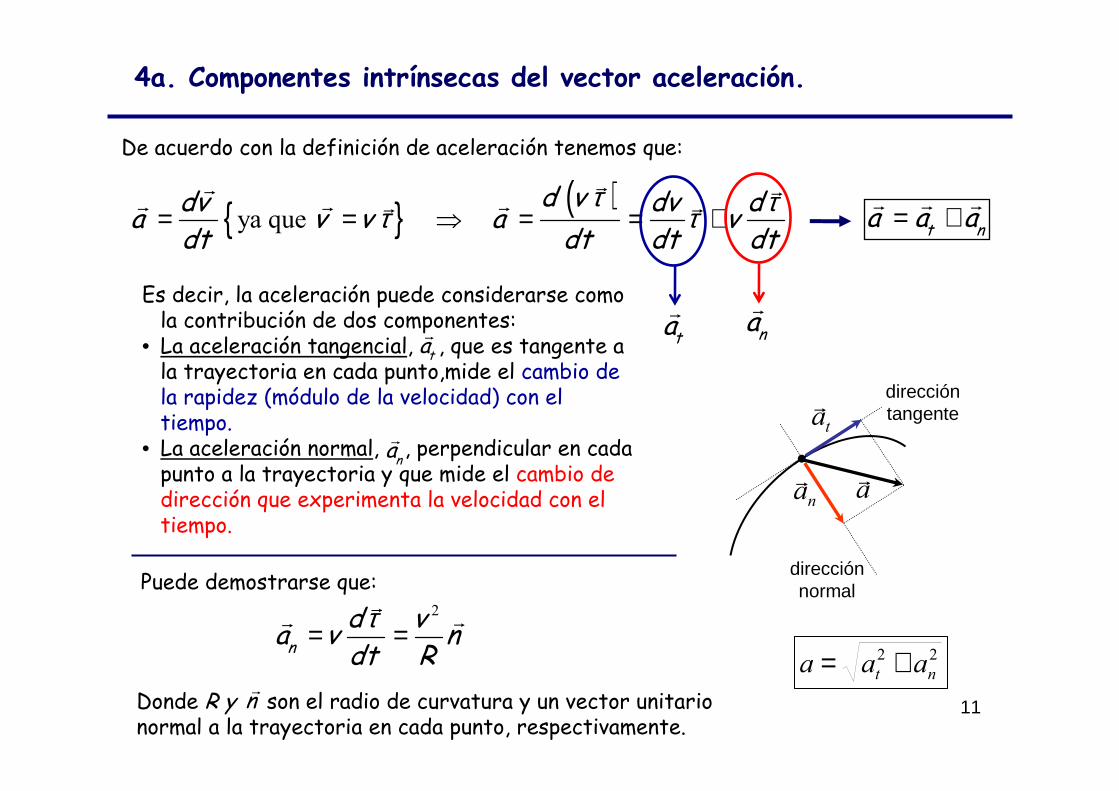
De acuerdo con la definición de aceleración tenemos que:
{ } ( )ya que
τ ττ τ= = ⇒ = = +�� �
� � �� �d vdv dv da v v a v
dt dt dt dt
�
ta�
na
= +� � �
t na a a
Es decir, la aceleración puede considerarse como la contribución de dos componentes:
• La aceleración tangencial, , que es tangente a la trayectoria en cada punto,mide el cambio de la rapidez (módulo de la velocidad) con el tiempo.
• La aceleración normal, , perpendicular en cada punto a la trayectoria y que mide el cambio de dirección que experimenta la velocidad con el tiempo.
dirección tangente
dirección normal
a�
22
nt aaa +=
ta�
na�
Puede demostrarse que:
�
ta
�
na
2τ= =�
��
n
d va v n
dt R
Donde R y son el radio de curvatura y un vector unitario normal a la trayectoria en cada punto, respectivamente.
�
n
4a. Componentes intrínsecas del vector aceleración. Otra forma
1v�
2v�
2v�
v∆�
nv∆�
tv∆�
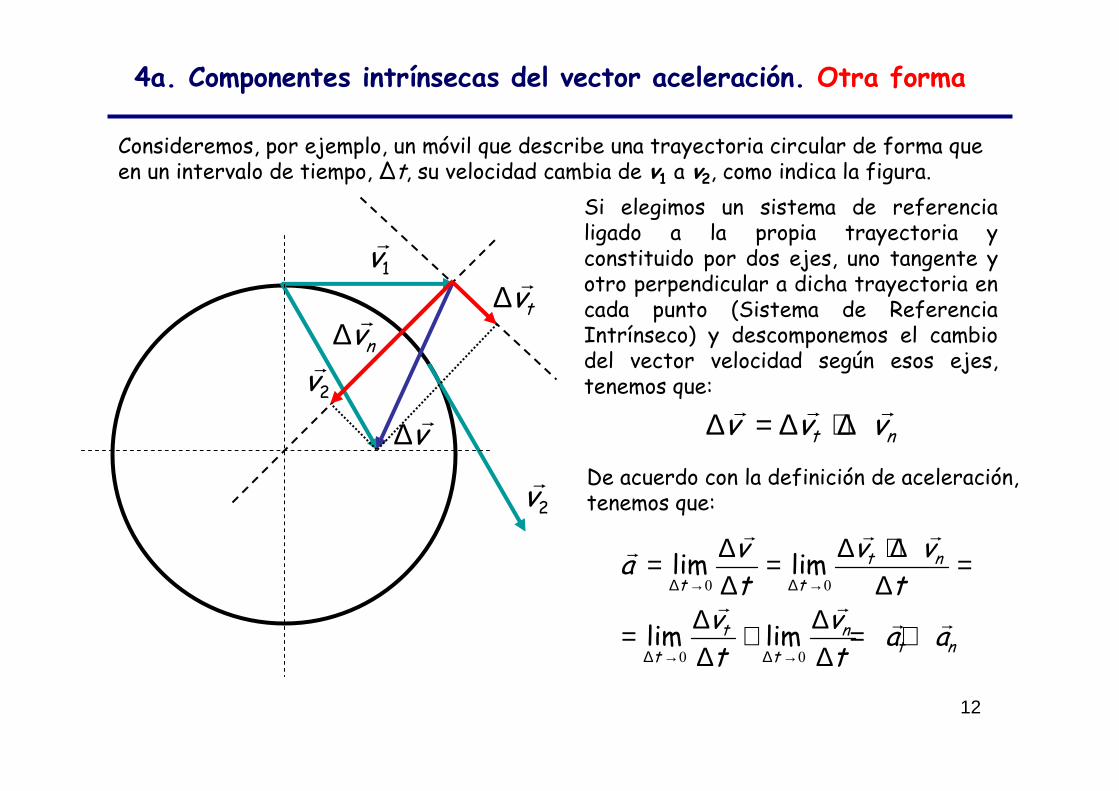
t nv v v∆ = ∆ + ∆� � �
De acuerdo con la definición de aceleración, tenemos que:
0 0
0 0
lim lim
lim lim
t n
t t
t nt n
t t
v vva
t tv v
a at t
∆ → ∆ →
∆ → ∆ →
∆ + ∆∆= = =∆ ∆
∆ ∆= + = +∆ ∆
� ��
�
� �
� �
Consideremos, por ejemplo, un móvil que describe una trayectoria circular de forma que en un intervalo de tiempo, ∆t, su velocidad cambia de v1 a v2, como indica la figura.
Si elegimos un sistema de referencia ligado a la propia trayectoria y constituido por dos ejes, uno tangente y otro perpendicular a dicha trayectoria en cada punto (Sistema de Referencia Intrínseco) y descomponemos el cambio del vector velocidad según esos ejes, tenemos que:
12
13
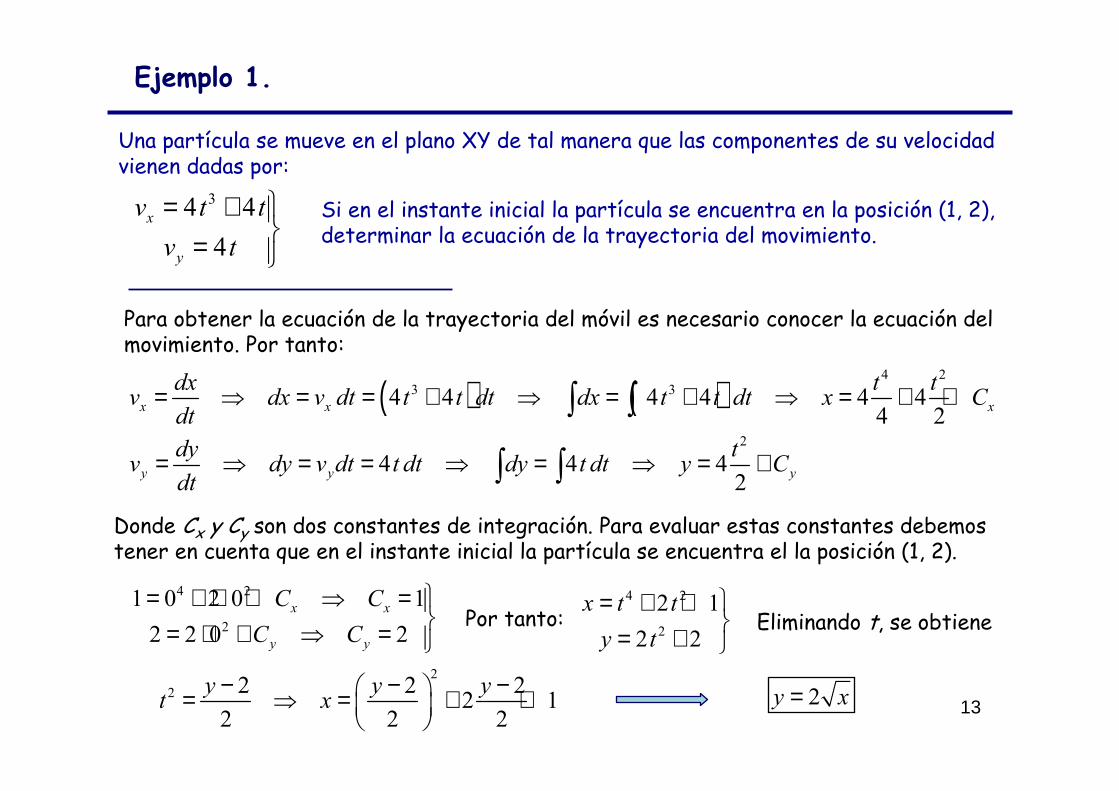
Ejemplo 1.
Una partícula se mueve en el plano XY de tal manera que las componentes de su velocidad vienen dadas por:
Si en el instante inicial la partícula se encuentra en la posición (1, 2), determinar la ecuación de la trayectoria del movimiento.
34 4
4
x
y
v t t
v t
= + =
Para obtener la ecuación de la trayectoria del móvil es necesario conocer la ecuación del movimiento. Por tanto:
( ) ( )4 2
3 34 4 4 4 4 44 2
x x x
dx t tv dx v dt t t dt dx t t dt x C
dt= ⇒ = = + ⇒ = + ⇒ = + +∫ ∫
2
4 4 42
y y y
dy tv dy v dt t dt dy t dt y C
dt= ⇒ = = ⇒ = ⇒ = +∫ ∫
Donde Cx y Cy son dos constantes de integración. Para evaluar estas constantes debemos tener en cuenta que en el instante inicial la partícula se encuentra el la posición (1, 2).
4 2
2
1 0 2 0 1
2 2 0 2
= + ⋅ + ⇒ = = ⋅ + ⇒ =
x x
y y
C C
C CPor tanto:
4 2
2
2 1
2 2
x t t
y t
= + +
= + Eliminando t, se obtiene
2
2 2 2 22 1
2 2 2
y y yt x
− − − = ⇒ = + +
2y x=
14
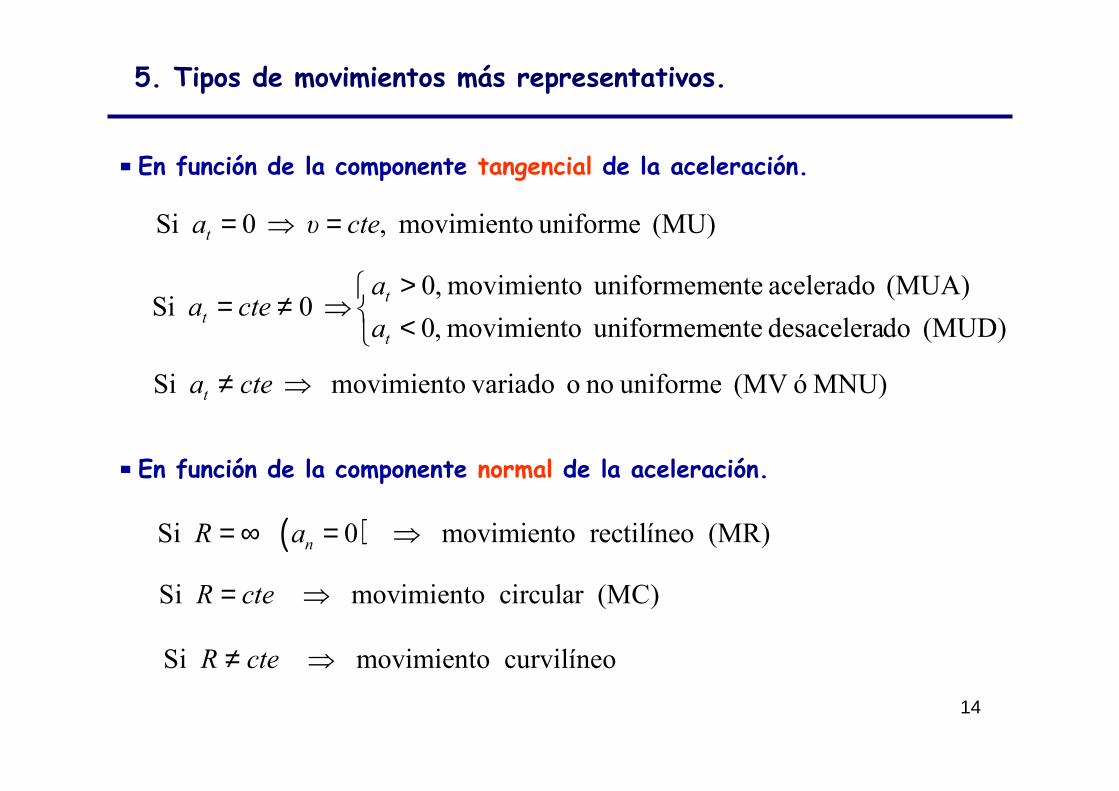
5. Tipos de movimientos más representativos.
En función de la componente tangencial de la aceleración.
(MU) uniforme movimiento , 0 Si cteυat =⇒=
(MUD) dodesacelera nteuniformeme movimiento ,0
(MUA) acelerado nteuniformeme movimiento ,0 0 Si
<>
⇒≠=t
t
ta
actea
En función de la componente normal de la aceleración.
( )Si 0 movimiento rectilíneo (MR) nR a= ∞ = ⇒
Si movimiento circular (MC) R cte= ⇒
Si movimiento curvilíneo R cte≠ ⇒
MNU) ó (MV uniforme no o variadomovimiento Si ⇒≠ cteat
15
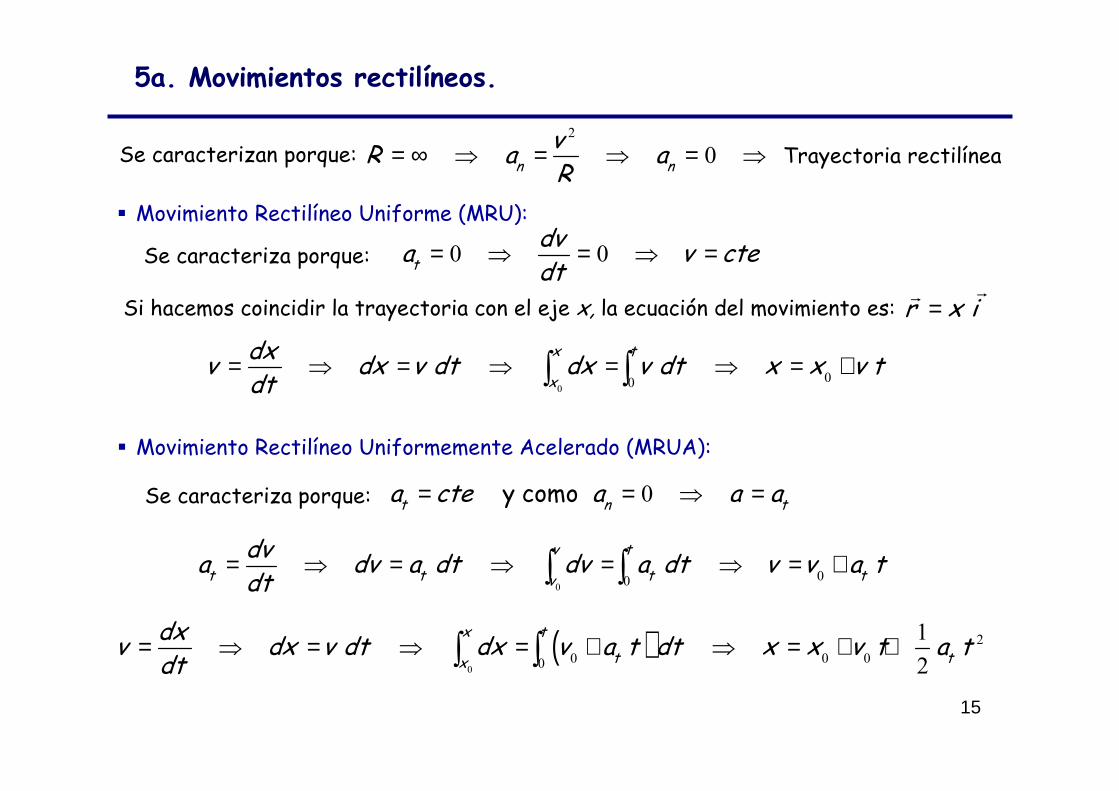
5a. Movimientos rectilíneos.
Se caracterizan porque:2
0n n
vR a a
R= ∞ ⇒ = ⇒ = ⇒ Trayectoria rectilínea
Si hacemos coincidir la trayectoria con el eje x, la ecuación del movimiento es: r x i=��
000
x t
x
dxv dx v dt dx v dt x x v t
dt= ⇒ = ⇒ = ⇒ = +∫ ∫
� Movimiento Rectilíneo Uniforme (MRU):
Se caracteriza porque: 0 0t
dva v cte
dt= ⇒ = ⇒ =
� Movimiento Rectilíneo Uniformemente Acelerado (MRUA):
Se caracteriza porque: 0y como t n ta cte a a a= = ⇒ =
000
v t
t t t tv
dva dv a dt dv a dt v v a t
dt= ⇒ = ⇒ = ⇒ = +∫ ∫
( )0
2
0 0 00
1
2
x t
t tx
dxv dx v dt dx v a t dt x x v t a t
dt= ⇒ = ⇒ = + ⇒ = + +∫ ∫
16
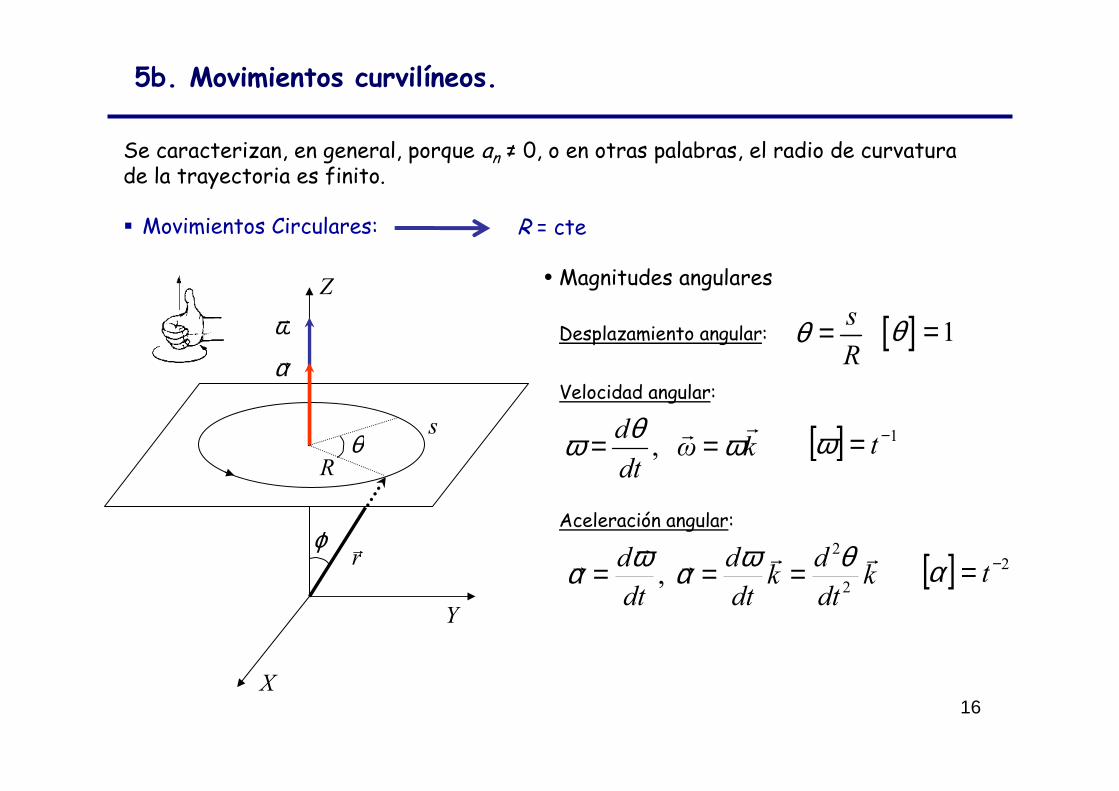
5b. Movimientos curvilíneos.
Se caracterizan, en general, porque an ≠ 0, o en otras palabras, el radio de curvatura de la trayectoria es finito.
� Movimientos Circulares: R = cte
Z
X
Y
R
r�ϕ
ω�
α�
θs
• Magnitudes angulares
Desplazamiento angular:s
Rθ = [ ] 1θ =
Velocidad angular:
, d
ω kdt
θω ω= =�
� [ ] 1−= tω
Aceleración angular:
kdt
dk
dt
d
dt
d ���
�
�
2
2
,θωαωα === [ ] 2−= tα
17
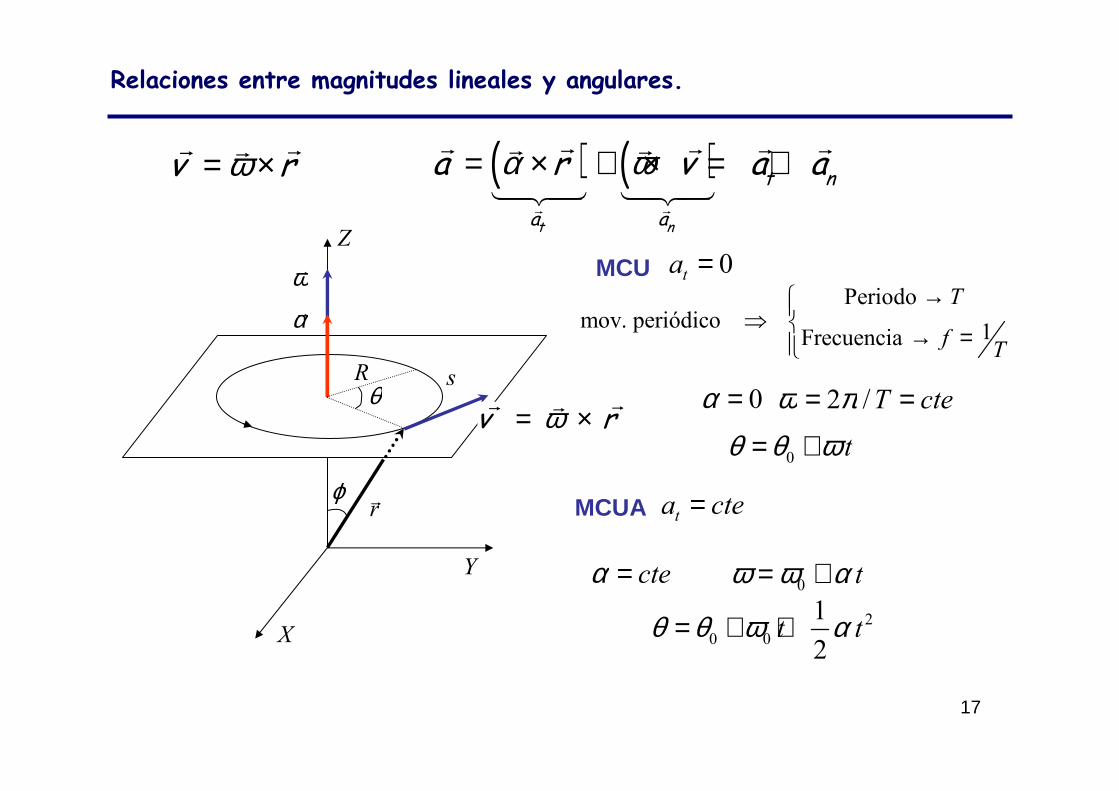
Relaciones entre magnitudes lineales y angulares.
θ
α�ω�
Z
X
Y
r�
v rω= ×�� �
ϕ
sR
v rω= ×�� � ( ) ( )
t n
t n
a a
a r v a aα ω= × + × = +� �
�� � � �� �
����� �����
MCU 0=ta
cteT == /2πω0=α
0 tθ θ ω= +
MCUA cteat =
0 tω ω α= +cte=α2
0 0
1
2t tθ θ ω α= + +
Periodomov. periódico
1Frecuencia
T
fT
→⇒ → =
18
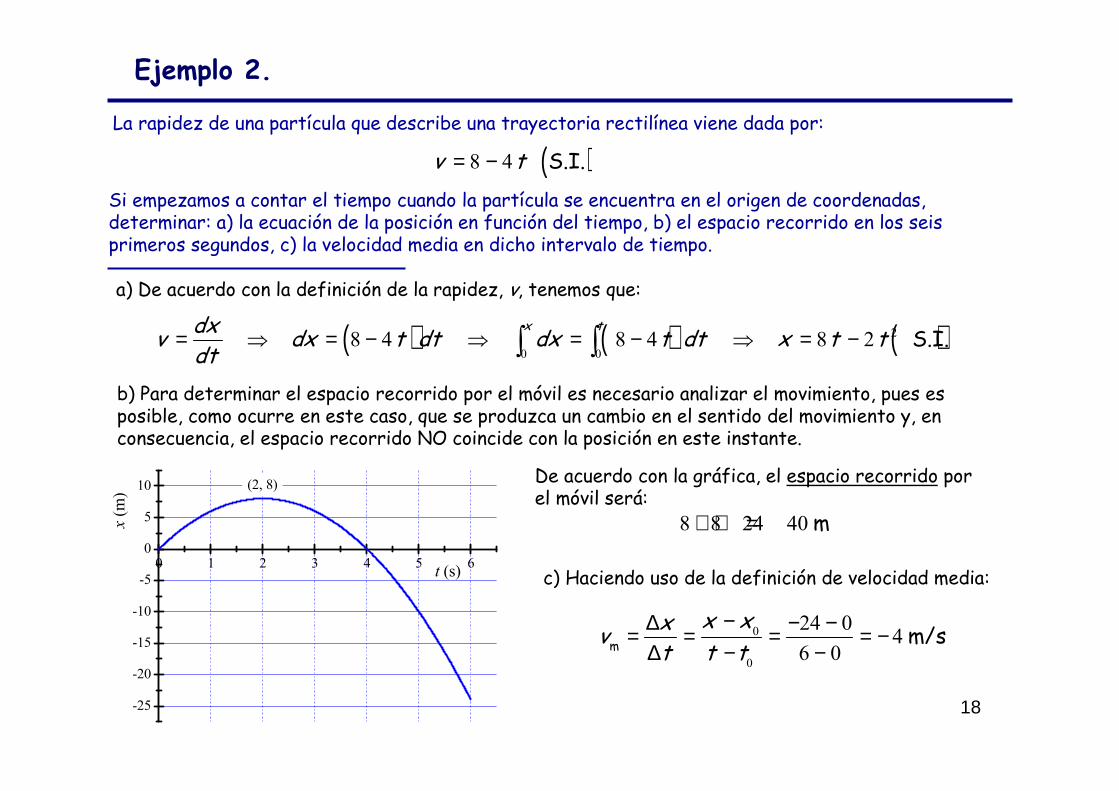
Ejemplo 2.
La rapidez de una partícula que describe una trayectoria rectilínea viene dada por:
( )8 4 S.I.v t= −
Si empezamos a contar el tiempo cuando la partícula se encuentra en el origen de coordenadas, determinar: a) la ecuación de la posición en función del tiempo, b) el espacio recorrido en los seis primeros segundos, c) la velocidad media en dicho intervalo de tiempo.
a) De acuerdo con la definición de la rapidez, v, tenemos que:
( ) ( ) ( )2
0 08 4 8 4 8 2 S.I.
x tdxv dx t dt dx t dt x t t
dt= ⇒ = − ⇒ = − ⇒ = −∫ ∫
b) Para determinar el espacio recorrido por el móvil es necesario analizar el movimiento, pues es posible, como ocurre en este caso, que se produzca un cambio en el sentido del movimiento y, en consecuencia, el espacio recorrido NO coincide con la posición en este instante.
0 1 2 3 4 5 6
-25
-20
-15
-10
-5
0
5
10
x (m)
t (s)
(2, 8)De acuerdo con la gráfica, el espacio recorrido por el móvil será:
8 8 24 40 m+ + =
c) Haciendo uso de la definición de velocidad media:
0
0
24 04
6 0m
m/sx xx
vt t t
−∆ − −= = = = −∆ − −
19
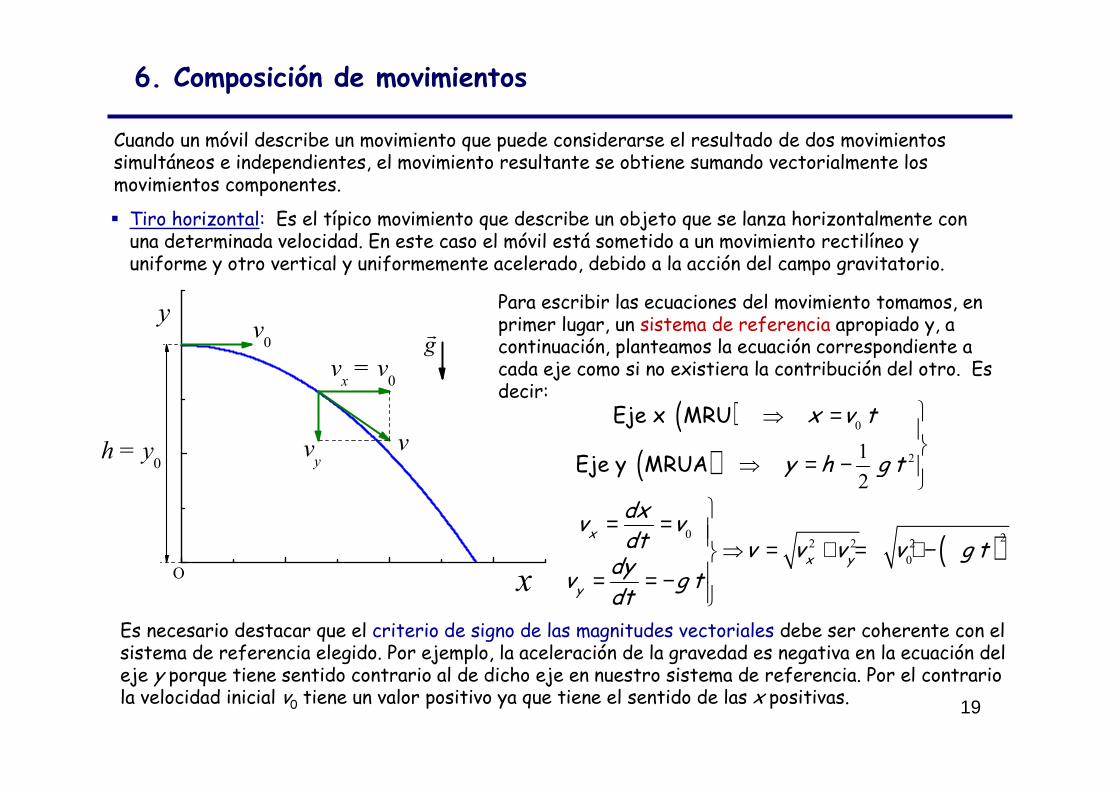
6. Composición de movimientos
Cuando un móvil describe un movimiento que puede considerarse el resultado de dos movimientos simultáneos e independientes, el movimiento resultante se obtiene sumando vectorialmente los movimientos componentes.
� Tiro horizontal: Es el típico movimiento que describe un objeto que se lanza horizontalmente con una determinada velocidad. En este caso el móvil está sometido a un movimiento rectilíneo y uniforme y otro vertical y uniformemente acelerado, debido a la acción del campo gravitatorio.
Para escribir las ecuaciones del movimiento tomamos, en primer lugar, un sistema de referencia apropiado y, a continuación, planteamos la ecuación correspondiente a cada eje como si no existiera la contribución del otro. Es decir:
vvy
vx = v
0
O x
y
h = y0
v0
�
g
( )( )
0
21
2
Eje x MRU
Eje y MRUA
x v t
y h g t
⇒ =
⇒ = −
Es necesario destacar que el criterio de signo de las magnitudes vectoriales debe ser coherente con el sistema de referencia elegido. Por ejemplo, la aceleración de la gravedad es negativa en la ecuación del eje y porque tiene sentido contrario al de dicho eje en nuestro sistema de referencia. Por el contrario la velocidad inicial v0 tiene un valor positivo ya que tiene el sentido de las x positivas.
( )0 22 2 2
0
x
x y
y
dxv v
dt v v v v g tdy
v g tdt
= =
⇒ = + = + −= = −
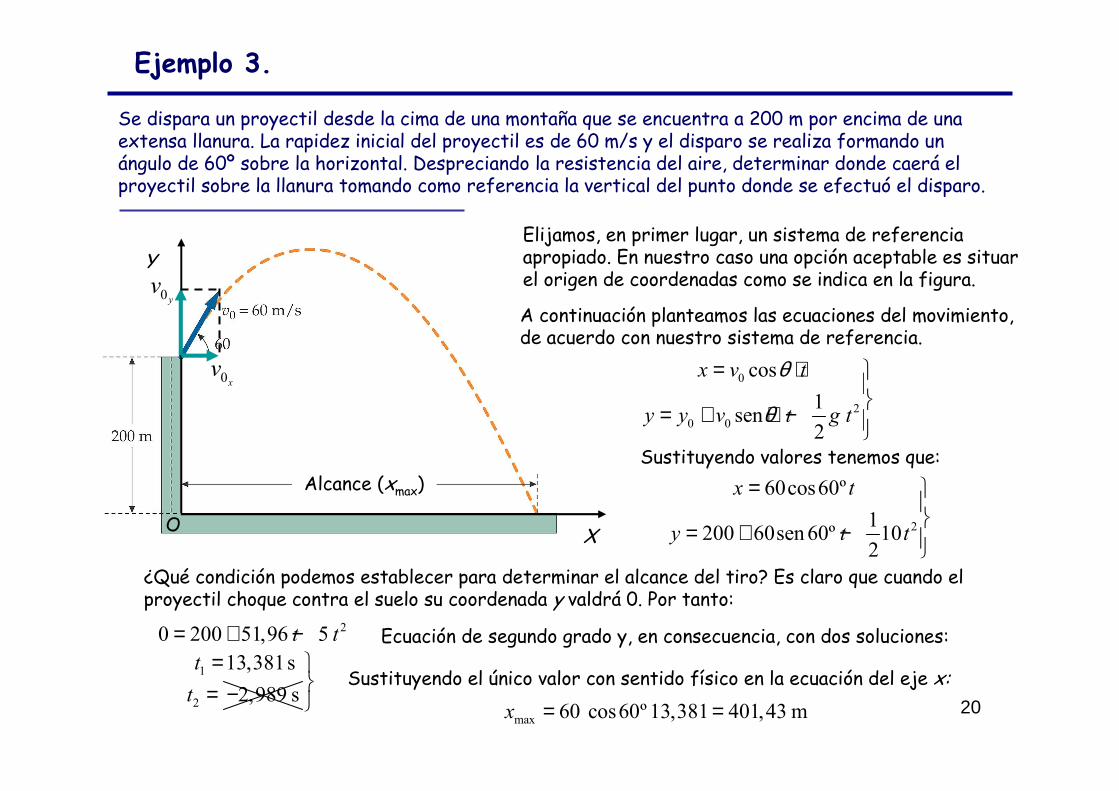
Ejemplo 3.
Se dispara un proyectil desde la cima de una montaña que se encuentra a 200 m por encima de una extensa llanura. La rapidez inicial del proyectil es de 60 m/s y el disparo se realiza formando un ángulo de 60º sobre la horizontal. Despreciando la resistencia del aire, determinar donde caerá el proyectil sobre la llanura tomando como referencia la vertical del punto donde se efectuó el disparo.
Elijamos, en primer lugar, un sistema de referencia apropiado. En nuestro caso una opción aceptable es situar el origen de coordenadas como se indica en la figura.
X
Y
O
A continuación planteamos las ecuaciones del movimiento, de acuerdo con nuestro sistema de referencia.
0
2
0 0
cos
1sen
2
x v t
y y v t g t
θ
θ
= ⋅ = + ⋅ −
2
60cos60º
1200 60sen60º 10
2
x t
y t t
= = + −
Sustituyendo valores tenemos que:
0xv
0yv
¿Qué condición podemos establecer para determinar el alcance del tiro? Es claro que cuando el proyectil choque contra el suelo su coordenada y valdrá 0. Por tanto:
20 200 51,96 5t t= + − Ecuación de segundo grado y, en consecuencia, con dos soluciones:
1
2
13,381s
2,989 s
t
t
== −
max 60 cos60º 13,381 401,43 mx = =Sustituyendo el único valor con sentido físico en la ecuación del eje x:
Alcance (xmax)
20
7. Transformaciones de Galileo.
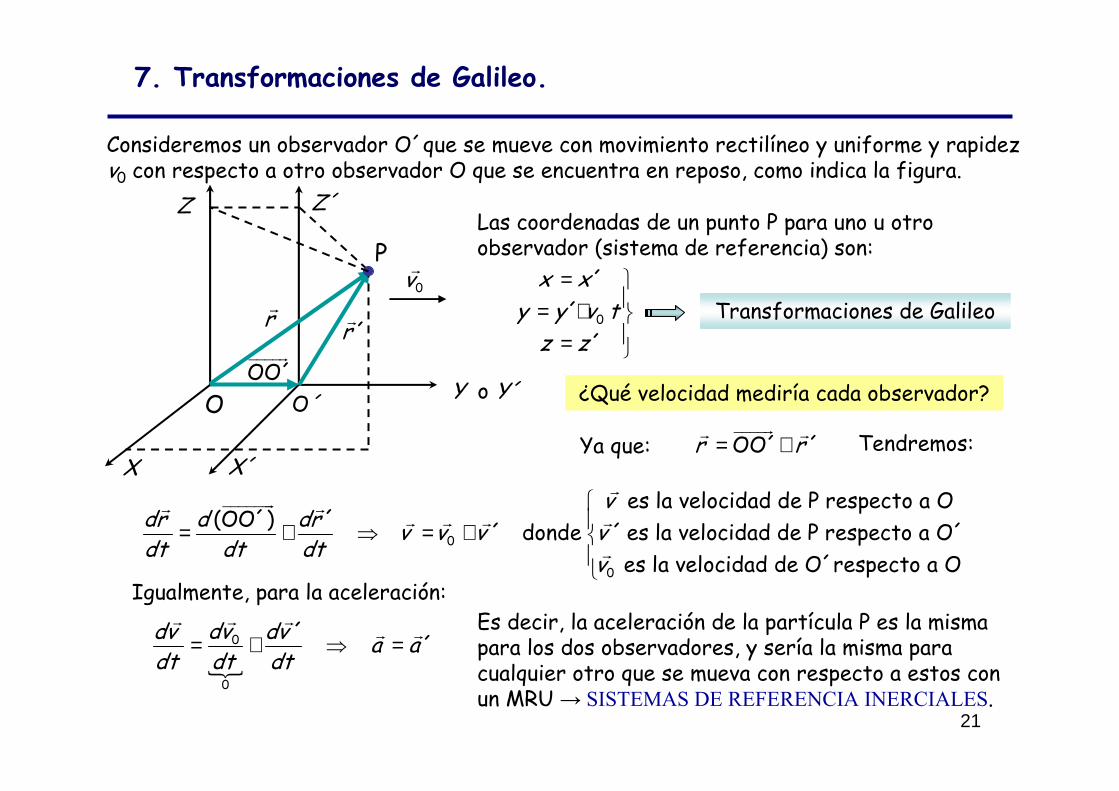
Consideremos un observador O´que se mueve con movimiento rectilíneo y uniforme y rapidez v0 con respecto a otro observador O que se encuentra en reposo, como indica la figura.
X
Y
Z
Oo Y´
X´
Z´
O´
r�
´r�
OO´�����
PLas coordenadas de un punto P para uno u otro observador (sistema de referencia) son:
0
´
´
´
x x
y y v t
z z
= = + =
0v�
Transformaciones de Galileo
¿Qué velocidad mediría cada observador?
Ya que: OO´ ´r r= +�����
� �
Tendremos:
0
0
es la velocidad de P respecto a O(OO´) ´
´ donde ́es la velocidad de P respecto a O´
es la velocidad de O´respecto a O
vdr d dr
v v v vdt dt dt
v
= + ⇒ = +
�
�������� �
� � � �
�
Igualmente, para la aceleración:
�
0
0
´´
dvdv dva a
dt dt dt= + ⇒ =�� �
� �Es decir, la aceleración de la partícula P es la misma para los dos observadores, y sería la misma para cualquier otro que se mueva con respecto a estos con un MRU → SISTEMAS DE REFERENCIA INERCIALES.
21