caappiittuulloo 22 meeccaanniissmmooss división 2 ... · el desarrollo general de la metodología...
TRANSCRIPT

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
CCAAPPIITTUULLOO 22
MMEECCAANNIISSMMOOSS
División 2
Mecanismos de Barras: Análisis de Casos.
Mecanismos de cuatro barras
Análisis Algebraico Vectorial de
Posición, Velocidad y Aceleración

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
1. Introducción
En esta división del capítulo de mecanismos se presentarán los conceptos básicos de los
mecanismos de barras. Se verán los mecanismos de cuatro o más eslabones. Movimientos
especializados: intermitentes, inversiones, etc. Se efectuará el análisis y síntesis del
mecanismo genérico de cuatro barras para diferentes configuraciones. Etiología
2. Determinación del grado de libertad de un mecanismo
Se recordará de la División 1 del presente capítulo que un mecanismo (o eslabonamiento)
puede estar compuesto por un grupo de piezas o eslabones que al estar interconectados
generan un movimiento especificado. El eslabonamiento se compone, en primera instancia
de análisis, por “cuerpos rígidos”. Estos cuerpos rígidos se conectan unos con otros por
medio de enlaces o pares cinemáticos o juntas cinemáticas. La naturaleza de tales
conectores como también su forma determina las propiedades del eslabonamiento. Aun
cuando se pueden concebir muchos tipos de enlaces o pares cinemáticos (y de hecho muchos
existen, ver Figura 2.3), solamente unos cuatro tienen uso práctico en los eslabonamientos.
En la Figura 2.14 se muestran tales casos que permiten un grado de libertad (f = 1), dos
grados de libertad (f = 2) o tres grados de libertad (f = 3).
a) Junta de rotación: permite un solo una rotación en el plano (f = 1).
b) Junta prismática: permite solamente un desplazamiento axial (f = 1).
c) Junta cilíndrica: permite rotación y desplazamiento axial (f = 2).
d) Junta esférica: permite rotaciones en tres direcciones (f = 3).
(a) (b)
(c) (d) Figura 2.14. Pares cinemáticos o enlaces más comunes y prácticos
Las juntas de rotación y prismáticas son muy frecuentes en mecanismos concebibles en un
plano (Figura 2.13. (a) y (b)). Mientras que las juntas cilíndricas y esféricas son más comunes
en los mecanismos de movimientos espaciales o en tres dimensiones.

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Muchas veces se suele emplear una palabra específica para denominar un determinado tipo de
eslabón, como por ejemplo: manivela, cigüeñal, etc. Estas palabras son de uso más común o
convencional para los diseñadores. Dado que el objetivo principal de los diseñadores de
mecanismos es suministrar una determinada salida ante una entrada definida, entonces el
asunto pasa por elaborar las cadenas cinemáticas apropiadas para tal fin. En las Figuras 2.4 a
3.13 se muestran suficientes ejemplos. En la Figura 2.15 se extractan algunos casos típicos de
mecanismos de barras. Nótese que se pueden generar mecanismos complejos solamente con
cuatro tipos elementales de pares cinemáticos. En la Figura 2.15.a se muestran dos casos de
cadenas cinemáticas en el plano, en tanto que en la Figura 2.15.b se muestran cadenas
cinemáticas en el espacio. Por otro lado las cadenas cinemáticas pueden ser abiertas o
cerradas tal como se muestra en la Figura 2.16. Es claro que las cadenas cinemáticas abiertas
permitirán una mayor cantidad de grados de libertad que se deben especificar para poder
definir el sistema.
(a)
(b) Figura 2.15. Ejemplos de casos simples y complejos de cadenas cinemáticas.
Figura 2.16. Cadenas cinemáticas. (a) Abiertas. (b) Cerradas.
Observando la Figura 2.16, se puede colegir que el caso (a) posee tres grados de libertad, en
tanto que el caso (b) solo posee un grado de libertad. El grado de libertad que posee un
mecanismo se puede calcular empleando la siguiente expresión:
J
i
ifJLGDL1
1 (2.1)
Siendo:
= 3 o 6 según el mecanismo sea planar o espacial.

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
L = número de eslabones (la tierra es considerada un eslabón adicional)
J = número de juntas o pares cinemáticos.
fi = grado de libertad de la junta i-ésima.
-----------------------------------------------------------------------------------------------------------------
Ejemplo 2.1.a: El mecanismo de 3 eslabones articulados de la Figura 2.16.a, según se ha comentado en el
párrafo anterior, posee tres grados de libertad que pueden vincularse a los ángulos que forman las barras con la
línea horizontal imaginaria, instante a instante. Esto se puede justificar con la expresión (2.1). En efecto, siendo
que se trata de un sistema en el plano =3, hay cuatro eslabones (no olvidar la presencia de la tierra mediante el
anclaje), o sea L=4, hay tres juntas cinemáticas del tipo visto en la Figura 2.14.a (junta de rotación que ofrece un
solo grado de libertad), con esto J=3 y fi=1, luego aplicando la (2.1) se tiene:
31134313
11
i
J
i
ifJLGDL
Ejemplo 2.1.b: A diferencia del Ejemplo 2.1.a, el caso del mecanismo de la Figura 2.16.b, es tal que =3, L=4,
J=4, fi=1. En consecuencia la cantidad de grados de libertad es:
11144314
11
i
J
i
ifJLGDL
-----------------------------------------------------------------------------------------------------------------
La ecuación (2.1) es general para los diferentes tipos de mecanismos o cadenas cinemáticas,
sin embargo no se trata de una panacea ya que en algunos casos no se cumple estrictamente
como se puede ver en los siguientes ejemplos.
-----------------------------------------------------------------------------------------------------------------
Ejemplo 2.2: En la Figura adjunta se pueden apreciar dos mecanismos con un eslabón conectado mediante
juntas rotantes a otros tres que se vinculan con juntas rotantes a la tierra, en el caso de la izquierda de longitudes
distintas y en el caso de la derecha los tres verticales con la misma longitud.
cero GDL efectivo 1 GDL efectivo
Veamos que sucede en un caso y otro. En efecto, siendo que se trata de un sistema en el plano =3, hay cinco
eslabones (no olvidar la presencia de la tierra mediante el anclaje), o sea L=5, hay seis juntas cinemáticas del tipo
visto en la Figura 2.14.a (junta de rotación que ofrece un solo grado de libertad), con esto J=6 y fi=1, luego
aplicando la (2.1) se tiene:
01165316
11
i
J
i
ifJLGDL
Lo cual da cero grado de libertad, implicando movimiento bloqueado. Esta realidad es clara en el caso de la
figura de la izquierda, pero no en la de la derecha, ya que la misma puede rotar con uno solo de los tres eslabones
que gire poseyendo en consecuencia un grado de libertad.
-----------------------------------------------------------------------------------------------------------------

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Para aplicaciones específicas y más detalladas, se debe recurrir al concepto de síntesis
numérica. Este concepto permite establecer el número de eslabones y pares cinemáticos que
se necesitan para obtener una determinada movilidad o la respuesta ante una entrada definida.
El desarrollo general de la metodología de síntesis numérica de una cadena cinemática está
fuera de los alcances pretendidos para un primer curso de mecanismos en el contexto de
elementos de máquina y los mismos pueden seguirse en las referencias [1] y [3].
Por otro lado, los conceptos mencionados anteriormente se concentrarán para el caso de
mecanismo genérico de CUATRO BARRAS en virtud de su amplia aplicabilidad. En
este sentido, si en un mecanismo de cuatro barras dado, se selecciona arbitrariamente el
eslabón que sirve como conductor de movimiento o más comúnmente llamado manivela,
puede ocurrir que la manivela no rote completamente. Esto no es siempre necesario en la
práctica. Aun así, es necesario un criterio para determinar si la manivela rota 360º o no. Dado
el mecanismo de cuatro barras de la Figura 2.17 se puede establecer el criterio expuesto en la
ecuación (2.2) y denominado Criterio de Grashof-Gruebler.
qpsl (2.2)
Siendo:
l es la longitud del eslabón más largo
s es la longitud del eslabón más corto
p y q son las longitudes de los eslabones restantes
El criterio (2.2) pronostica el comportamiento de rotación o la posibilidad de rotación de
diferentes casos practicables en un mecanismo de cuatro barras. En la Figuras 2.17.b y 2.17.c
se muestran dos posibles casos de mecanismos que se deslindan de la estructura genérica de la
Figura 2.17.a. Tales casos particulares se denominan Inversiones del mecanismo. En el caso
de un mecanismo de cuatro barras se pueden obtener solamente cuatro inversiones.
Entonces si se cumple la condición o criterio (2.2), entonces se dice que el tipo de
eslabonamiento es eslabonamiento de tipo Grashof y por lo menos un eslabón podrá
realizar una rotación completa, claramente será el de menor longitud en tanto que por el
tipo de inversión se le permita movimiento. Esto no quiere decir que no existan otras
posibilidades donde algunos eslabones puedan tener una rotación completa, lo cual depende
estrictamente de la geometría. Esto se verá en el programa SAM 6.1 (ver referencia [4]) u
otros disponibles (Autodesk Force Effect Motion, para celular y tablet)
El concepto de inversión de movimiento es sumamente útil en el diseño de mecanismos, lo
cual permite que nuevas características se tornen evidentes. Para ello, obsérvese con
detenimiento la Figura 2.18, donde se ha fijado por turnos distintas barras del mismo sistema
para dar paso a 4 tipos distintos de movimientos. Obsérvese que en cada caso se dispuesto un

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
ancla como indicadora del eslabón que no rota y además mostrando la trayectoria del punto
que efectúa un ciclo completo sobre una circunferencia.
Figura 2.17. Capacidad de movilidad en un mecanismo de cuatro barras
Figura 2.18. Ejemplos de inversión de movimientos en mecanismos de cuatro barras
-----------------------------------------------------------------------------------------------------------------
Nota: Cuando se debe diseñar un mecanismo, hoy en día se emplean programas con diferente grado
de sofisticación que permiten reproducir la cinemática y la dinámica instante a instante. Sin embargo
existen situaciones en las cuales por necesidades de tiempo o espacio, se debe efectuar un trabajo
más manual, incluso simulando movimientos con reglas, compás en láminas de metal, madera y hasta
cartón. No se debe perder de vista esta alternativa.
-----------------------------------------------------------------------------------------------------------------
3. Sistema de cuatro barras
El aparentemente simple mecanismo (o cadena cinemática) de cuatro eslabones es en realidad
un dispositivo notoriamente sofisticado que permite efectuar una variada gama de operaciones
con unos pocos elementos constitutivos, según como sea diseñado y según como se ejecute su
movimiento de entrada. Tal mecanismo como el que se muestra en la Figura 2.19, puede ser
empleado para:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Coordinación de movimiento angular: El eslabón conductor b genera un movimiento
angular preestablecido para el eslabón d.
Generación de curvas: El eslabón conductor b causa que el punto C se mueva
siguiendo un camino o curva determinada.
Generación de movimiento: El eslabón conductor b causa que el segmento CD se
mueva de acuerdo a una roto-traslación preestablecida.
Figura 2.19. Mecanismo de cuatro barras genérico
A veces se necesita controlar la velocidad de salida tanto como la posición. Cuando las
rotaciones de la manivela de entrada (normalmente la “b” de la Figura 2.19) y la manivela de
salida (la “d” de la Figura 2.19) están coordinadas, es bastante fácil establecer una relación de
velocidades de entrada y de salida como bd / . Esto se puede hacer prolongando la línea AB
hasta que corte la línea OAOB, donde se obtiene el punto S. De tal manera que se puede hallar
la relación:
BAA
A
b
d
OOSO
SO
(2.3)
Ahora bien, hallar la velocidad lineal de un punto cualquiera en el cuerpo acoplador AB,
no es una tarea franca e inmediata, aunque no difícil, dado que se deben emplear las
ecuaciones de movimiento acopladas de tres cuerpos rígidos.
Por otro lado, se puede establecer una relación entre los torques de las manivelas b y d en
virtud de la conservación de la energía. De tal manera que se puede plantear:
dt
dT
dt
dT bd
(2.4)
Con la cual se puede obtener la relación de torques RT como:
b
d
d
bT
dt
d
dt
d
T
TR
(2.5)
Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Téngase presente que la (2.5) es una entidad que expresa la relación de torque en un instante
determinado, aun si la velocidad de entrada es constante.
El análisis de la cinemática de cualquier mecanismo articulado de barras implica el
conocimiento instante a instante de las posiciones de los puntos característicos tales como
los centros de las juntas cinemáticas o bien puntos especiales en los que se quiera conocer el
movimiento. Además se requiere conocer velocidades y aceleraciones de puntos específicos o
de elementos específicos. En definitiva se deberá conocer POSICION, VELOCIDAD y
ACELERACION. Para efectuar tales análisis existen diversos métodos y enfoques que, para
sistemas contenidos en el plano, pueden clasificarse en:
- Análisis algebraico
- Análisis vectorial-fasorial
El primer enfoque (análisis algebraico) permite elaborar formas de solución a partir de
relaciones angulares sencillas de entender pero conducentes a potenciales errores si no se
tienen en cuenta las características de las funciones trigonométricas inversas en los distintos
cuadrantes y como las calculan las computadoras y/o calculadoras. El segundo enfoque es
más expeditivo pues se basa en entidades vectoriales que rotan (los denominados fasores) que
son fácilmente manipulables para hallar las fórmulas de tipo vectorial para la posición,
velocidad y aceleración de puntos característicos.
4. Mecanismo de 4 barras: Análisis algebraico de posición
Un mecanismo de cuatro barras puede ser sintetizado mediante un grupo de expresiones que
identifican la posición de los puntos característicos del mismo en función de los datos
geométricos y del valor del grado de libertad que se prescribe, por caso la velocidad de
rotación de una de las barra b. Sin embargo se debe tener presente que pueden suscitarse
inconvenientes para poder describir la posición (y consecuentemente la velocidad y
aceleración) de los puntos característicos y en consecuencia de todo el mecanismo, debido a la
descripción vinculada fuertemente a funciones trigonométricas inversas. Tales funciones al
ser resueltas en calculadoras y/o computadoras no discriminan estrictamente la ubicación del
cuadrante y en consecuencia pueden aparecer discontinuidades indebidas si no se toman los
recaudos apropiados. Recuérdese que las funciones ArcSin[], ArcCos[], ArcTan[] de una
calculadora (como también de un programa de computadora) no discriminan si el ángulo está
en el cuadrante que corresponde, por ejemplo ArcSin[0.5]=30º y ArcSin[-0.5]=-30º, mientras
que Sin[30º] =Sin[150º]=0.5, y Sin[330]=Sin[-30]=-0.5.
Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
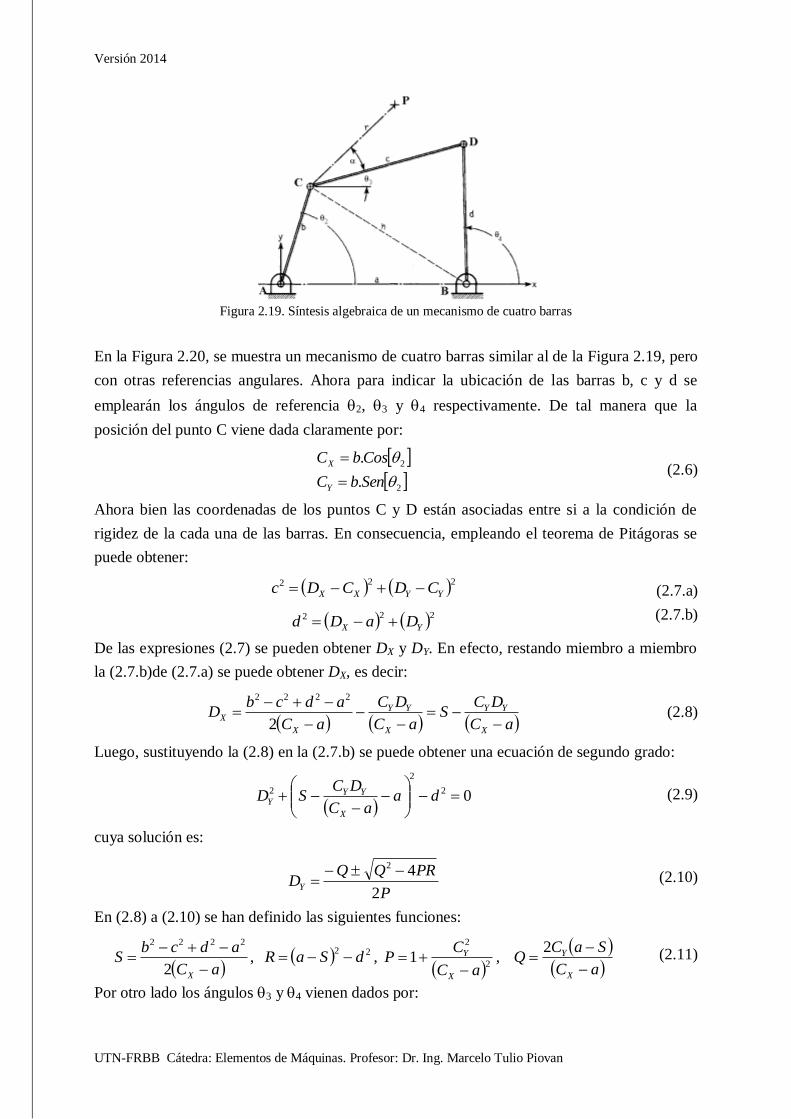
Figura 2.19. Síntesis algebraica de un mecanismo de cuatro barras
En la Figura 2.20, se muestra un mecanismo de cuatro barras similar al de la Figura 2.19, pero
con otras referencias angulares. Ahora para indicar la ubicación de las barras b, c y d se
emplearán los ángulos de referencia 2, 3 y 4 respectivamente. De tal manera que la
posición del punto C viene dada claramente por:
2
2
.
.
SenbC
CosbC
Y
X
(2.6)
Ahora bien las coordenadas de los puntos C y D están asociadas entre si a la condición de
rigidez de la cada una de las barras. En consecuencia, empleando el teorema de Pitágoras se
puede obtener:
222
YYXX CDCDc
222
YX DaDd
(2.7.a)
(2.7.b)
De las expresiones (2.7) se pueden obtener DX y DY. En efecto, restando miembro a miembro
la (2.7.b)de (2.7.a) se puede obtener DX, es decir:
aC
DCS
aC
DC
aC
adcbD
X
YY
X
YY
X
X
2
2222
(2.8)
Luego, sustituyendo la (2.8) en la (2.7.b) se puede obtener una ecuación de segundo grado:
02
2
2
da
aC
DCSD
X
YYY (2.9)
cuya solución es:
P
PRQQDY
2
42 (2.10)
En (2.8) a (2.10) se han definido las siguientes funciones:
aC
adcbS
X
2
2222
, 22dSaR ,
22
1aC
CP
X
Y
,
aC
SaCQ
X
Y
2 (2.11)
Por otro lado los ángulos 3 y 4 vienen dados por:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
XX
YY
CD
CDArcTan3 (2.12)
aD
DArcTan
X
Y4 (2.13)
Ahora bien, la posición del punto P se puede obtener de la misma manera que en la ecuación
(2.8), es decir:
32
32
..
..
SenrSenbP
CosrCosbP
Y
X (2.14)
Nótese que la posición del punto P, aún depende del valor del ángulo 3 calculado según
(2.12). Esto exige tener un cuidado especial con los signos de los argumentos, como se verá
en el Ejemplo 2.3. En la Tabla 3.1 siguiente se aprecia las posibles variantes para la función
ArcTan[ ].
X
Y
A
AArcTan ubicado en el cuadrante
Si 0YA y 0XA Primero, 90,0
Si 0YA y 0XA Segundo, 180,90
Si 0YA y 0XA Tercero, 270,180
Si 0YA y 0XA Cuarto, 360,270
Tabla 3.1. Valores de la función ArcTan[].
Figura 2.21. Posibles configuraciones para un mecanismo de cuatro barras conducido por manivela.
Nótese que de la expresión (2.10) se pueden obtener dos soluciones. Esto quiere decir que la
solución es válida para dos configuraciones que permite el mecanismo de cuatro barras. Tales
posiciones se llaman “Configuración abierta” y “Configuración cruzada” como se ve en la
Figura 2.21

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
-----------------------------------------------------------------------------------------------------------------
Ejemplo 2.3: El mecanismo de la Figura 2.20 tiene las siguientes dimensiones: a=100 mm, b=60 mm, c=85 mm,
d=95mm, r=60 mm, =. El movimiento se genera por rotación de la barra b con respecto al eje que pasa por
el punto A, comenzando desde (0)=60o=/3, a una velocidad =2 en sentido anti-horario. Se pide calcular la
posición de los puntos C, D y P en función del tiempo. Para la resolución de este problema se empleará el
programa Mathematica.
En primer lugar se debe verificar la condición de Grashof-Gruebler para determinar
180160
958560100
dcba
, luego la barra “b” rota 360º.
Luego se tiene que determinar la ley de variación del ángulo en función del tiempo (observe que el sentido de
rotación es positivo de acuerdo a la terna XYZ de la Figura 2.19):
Dado que dt
d2
, luego
ttddt
tt
23
2
0
2
0
2
2
Ahora se deben calculan los ángulos y , empleando el soft de álgebra simbólica Mathematica (se
recomienda a los alumnos bajar archivo Ejemplo2_3.nb de la página web de la asignatura y seguir el detalle).
Para calcular los ángulos, primero se necesitan tener desarrolladas las expresiones (2.6) a (2.11), que por ser muy
voluminosas no se expresan “in-extenso” y si se quiere ver la forma se quitan los caracteres “;” al final de cada
renglón.
Ahora se calculan los ángulos 3 y 4 como:
Ahora con 3 y 4 se determina la posición del punto P.
Ahora se determinarán las coordenadas de la posición inicial de los puntos mencionados:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
A continuación se graficará la trayectoria de los puntos C, D y P, y la forma del mecanismo en el instante inicial.
En ellos se ha empleado la función ArcTan[] convencional de Mathematica y una función ArcTan2[]
programada especialmente, según la Tabla 3.1, para evitar desfasajes.
ArcTan[] por defecto de Mathematica/calculadora ArcTan[] programada de acuerdo a Tabla 3.1
Se puede notar que existe un desfasaje espurio (por falta de continuidad) en el gráfico de la izquierda y que
conduce a una configuración inaceptable e ilógica en las trayectorias del punto P. Obsérvese que cuando se
tiene en cuenta la valoración real de la función arco tangente, las trayectorias son lo que deben ser, o sea
manteniendo la continuidad de la trayectoria.
-----------------------------------------------------------------------------------------------------------------
5. Mecanismo de 4 barras: Análisis vectorial de posición
Una forma ventajosa para efectuar el análisis de posición (y luego de velocidad y de
aceleración) es mediante el empleo de formas vectoriales para los eslabones, recurriendo al
concepto vectorial de los números complejos. En efecto se recordará que un vector AR en el

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
plano (ver Figura 2.22.a) puede representarse por medio de cualquiera de las siguientes
expresiones:
iA eR.R , con AR R (2.15.a)
j i ˆ.ˆ. SenRCosRA R (2.15.b)
SenRiCosRA ... R (2.15.c)
La (2.15.a) se denomina representación polar o fasorial, en tanto que las dos restantes se
denominan representaciones cartesianas. Todas son útiles sin embargo la representación polar
es bastante más útil en tanto que permite condensar sobre una expresión simple, mayor
contenido de información. Además la función (2.15.a) es una de las más fáciles para derivar
(en consecuencia para poder efectuar luego el análisis de velocidad y aceleración) es decir:
Si iA eR.R luego
iA eRid
d..
R (2.16)
Por otro lado recuérdese que en los vectores en representación compleja como la (2.16) o
(2.15.a) o (2.15.c), al efectuar una multiplicación con el operador ‘i’, se tiene como resultado
una rotación de 90º en el sentido antihorario. Así pues, el vector AB i RR . , luego y de modo
semejante AC i RR .2 y BAD ii RRR ..3 , tal como se puede apreciar en la Figura 2.21.b.
Figura 2.22. Representación de vectores en números imaginarios
Figura 2.23. Mecanismo de cuatro barras representado vectorialmente

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Así pues la ecuación vectorial que describe el mecanismo de cuatro barras de la Figura 2.23
puede representarse como:
01432 RRRR (2.17)
O bien
0.... 1432 iiii
edecebea (2.18)
Téngase presente que la (2.18) es una ecuación de equilibrio vectorial y que se necesita
conocer los valores de 2, 3 y 4. Claramente 2 es una variable independiente (ángulo de
entrada) y se deben obtener 3 y 4 en función de a, b, c, d y de 2. Nótese que 1 es un
ángulo nulo.
Así pues para resolver en forma polar la ecuación (2.18) se deberá descomponer en sus partes
reales e imaginarias recordando que 1 = 0, es decir:
0... 432 dCoscCosbCosa (2.19.a)
0... 432 SencSenbSena (2.19.b)
Las expresiones (2.19) forman un sistema de dos ecuaciones con dos incógnitas, lo cual
permite su resolución.
Así pues, de la (2.19) podemos obtener:
342 ... CosbdCoscCosa (2.20.a)
342 ... SenbSencSena (2.20.b)
De donde elevando al cuadrado miembro a miembro y sumando ambas expresiones se tiene
luego de una serie de simplificaciones:
424232241 SenSenCosCosKCosKCosK (2.21)
Siendo
a
dK 1 ,
c
dK 2 ,
ac
dcbaK
2
2222
3
(2.22)
Para resolver la (2.22) en 4 se emplean las siguientes identidades trigonométricas:
21
22
42
4
4
Tan
Tan
Sen ,
21
21
42
42
4
Tan
Tan
Cos (2.23)
De tal manera que se puede hallar la siguiente ecuación
022
442
CBA KTanKTanK
(2.24)
donde

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
3221
2
3122
1
2
1
KCosKKK
SenK
KKCosKK
C
B
A
(2.25)
Luego la solución de (2.29) dará:
A
CABB
K
KKKKArcTan
2
42
2
4 (2.26)
Ahora bien para hallar una expresión del ángulo 3 en función de a, b, c, d y de 2, se procede
en forma similar a la efectuada más arriba. De manera que:
D
FDEE
K
KKKKArcTan
2
42
2
3 (2.27)
Siendo:
5241
2
5124
1
2
1
KCosKKK
SenK
KKCosKK
F
E
D
(2.28)
Con:
a
dK 1 ,
b
dK 4 ,
ab
badcK
2
2222
5
(2.29)
Nótese que en (2.26) y (2.27) se pueden obtener dos soluciones tanto para 4 como para 3.
En estas circunstancias, si el numerador del argumento de la función Arco Tangente es
positivo se tendrá la configuración cruzada del mecanismo de cuatro barras de la Figura 2.21
(o sea la correspondiente al punto D), en tanto que si el numerador del argumento de la
función Arco Tangente es negativo se tendrá la configuración abierta del mismo mecanismo
(o sea la correspondiente al punto D’). Nuevamente en este caso hay que ser cuidadoso con el
empleo de la función arco tangente. En el siguiente ejemplo se podrá ver la evaluación de las
configuraciones abierta y cruzada.
-----------------------------------------------------------------------------------------------------------------
Ejemplo 2.4: El mecanismo de la Figura 2.23 tiene las siguientes dimensiones: a=60 mm, b=85 mm, c=95 mm,
d=100mm. El movimiento se genera por rotación de la barra ‘a’ con respecto al eje que pasa por el punto A,
comenzando desde (0)=60o=/3, a una velocidad =2 en sentido anti-horario. Se pide calcular la posición de
los puntos C y D en función del tiempo aplicando la metodología vectorial (llamada también fasorial) y
comprobar las dos configuraciones posibles: abierta y cruzada.
Para la resolución de este problema se empleará el programa Mathematica.
En primer lugar se debe verificar la condición de Grashof-Gruebler para determinar si el mecanismo rota o no:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
180160
bcad, luego la barra “a” rota 360º.
Luego se tiene que determinar la ley de variación del ángulo en función del tiempo (observe que el sentido de
rotación es positivo de acuerdo a la terna XYZ de la Figura 2.20):
Dado que dt
d2
, luego
ttddt
tt
23
2
0
2
0
2
2
Ahora se deben calculan los restantes ángulos como se indica en las expresiones (2.26) y (2.27) empleando el
soft de álgebra simbólica Mathematica (se recomienda bajar archivo Ejemplo2_4.nb de la página web de la
asignatura y seguir el detalle). Para calcular los ángulos, primero se necesitan tener desarrolladas las expresiones
(2.6) a (2.11), que por ser muy voluminosas no se expresan “in-extenso” y si se quiere ver la forma se quitan los
caracteres “;” al final de cada renglón. Primero de determinan las constantes Ki:
Ahora se calculan los ángulos 3 y 4 para la CONFIGURACIÓN CRUZADA (que por ser voluminosa no se
muestra en el apunte y se deja al alumno seguir y observar los pasos en la hoja de cálculo de Mathematica):
Ahora con 3 y 4 se determina la posición de los puntos C y D.
Ahora se determinarán las coordenadas de la posición inicial de los puntos mencionados:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
A continuación se graficará la trayectoria de los puntos C y D, y la forma del mecanismo en el instante inicial y
en un instante t=0.7 seg. En ellos se ha empleado tanto la función ArcTan[] que por defecto ofrece el programa
Mathematica como la función ArcTan[] programada especialmente para evitar los desfasajes
Configuración cruzada en t=0 seg Configuración cruzada en t=0.7 seg.
Ahora se calculará la CONFIGURACIÓN ABIERTA. Para ello 3 y 4 se calculan de la siguiente manera:
Ahora se determinarán las coordenadas de la posición inicial de los puntos mencionados:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
A continuación se graficará la trayectoria de los puntos C y D, y la forma del mecanismo en el instante inicial y
en un instante t=0.7 seg. En ellos se ha empleado tanto la función ArcTan[] que por defecto ofrece el programa
Mathematica como la función ArcTan[] programada especialmente para evitar los desfasajes
Configuración abierta en t=0 seg. Configuración abierta en t=0.7 seg.
-----------------------------------------------------------------------------------------------------------------
6. Mecanismo de 4 barras: Análisis vectorial de velocidad
Las ecuaciones de posición para el mecanismo de cuatro barras se obtuvieron en forma
vectorial en el apartado anterior. En la Figura 2.24 se muestra el mismo esquema que en la

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Figura 2.23 pero ahora indicando los vectores de velocidad. La velocidad de rotación 2 es la
velocidad de entrada y se supone conocida, en consecuencia se deben obtener las restantes
componentes de velocidad en función de los ángulos de posición (obtenidos según el apartado
anterior), las longitudes de los eslabones y la velocidad de rotación de entrada.
Figura 2.24. Mecanismo de cuatro barras representado vectorialmente junto con sus velocidades
Para obtener la ecuación vectorial de velocidades del mecanismo de la Figura 2.23 se tiene
que derivar respecto del tiempo la ecuación vectorial de la posición dada por (2.18). De
manera que se tiene:
0...... 432 432 dt
deci
dt
debi
dt
deai
iii (2.30)
Obsérvese que la ecuación (2.30) no es otra cosa que la ecuación de diferencia de velocidad o
ecuación de la velocidad relativa dada por:
0 DDCC VVV (2.31)
De tal manera que:
dt
deci
dt
debi
dt
deai
iii 432 432 .. ,.. ,..
DDCC
VVV (2.32)
Téngase presente que:
dt
d
dt
d
dt
d 44
33
22 , ,
(2.33)
Lo que se pretende obtener son los valores de CV , DCV , DV , 3 y 4 en función de los datos
geométricos y cinemáticos disponibles.
Así pues, el procedimiento de solución será parecido al desarrollado en el apartado anterior.
Entonces, expandiendo la (2.30) en su forma trigonométrica teniendo en cuenta (2.15.c) se
obtienen las siguientes dos componentes (real e imaginaria, o en los ejes X e Y):
0443322 SencSenbSena (2.34)
0443322 CoscCosbCosa (2.35)
Resolviendo en forma simultanea la (2.34) y la (2.35) se tiene:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
43
2423
Sen
Sen
b
a (2.36)
34
3224
Sen
Sen
c
a (2.37)
Luego reemplazando (2.36) y (2.37) en (2.32) se obtienen las velocidades de la siguiente
manera:
444
333
222
..
..
..
SenCosic
SenCosib
SenCosia
D
DC
C
V
V
V
(2.38)
La expresión (2.38) también va a contener las dos posibles configuraciones de la Figura 2.21,
en tanto que los ángulos 3 y 4 tienen dos soluciones según se explico anteriormente.
7. Mecanismo de 4 barras: Análisis vectorial de aceleración
En los apartados anteriores se obtuvieron expresiones para calcular la posición y las
velocidades del mecanismo de cuatro barras. En este apartado se desean calcular las
aceleraciones de los eslabones. Tales aceleraciones y sus componentes tangenciales y
normales se pueden apreciar en la Figura 2.25. Dado que se tienen como datos las
dimensiones del mecanismo, la velocidad 2 y aceleración 2 del eslabón de entrada (es decir
la manivela o eslabón ‘a’), las posiciones de los puntos C y D y las velocidades de los
eslabones ‘b’ y ‘c’, se desea obtener las aceleraciones de los eslabones ‘b’ y ‘c’.
Figura 2.25. Mecanismo de cuatro barras representado vectorialmente junto con sus aceleraciones
La ecuación vectorial de aceleración se obtiene derivando respecto del tiempo la ecuación
vectorial de la velocidad, es decir la (2.35). Esta operación dará:
0......... 432
4
2
43
2
32
2
2 iii
eciebieai (2.39)
Nótese que la expresión (2.39) es la ecuación de diferencia de las aceleraciones o bien de la
aceleración relativa, es decir:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
0 DDCC AAA (2.40)
De tal manera que:
4
3
2
...
...
...
4
2
4
3
2
3
2
2
2
i
i
i
eci
ebi
eai
n
D
t
DD
n
DC
t
DCDC
n
C
t
CC
AAA
AAA
AAA
(2.41)
Téngase presente que:
dt
d
dt
d
dt
d 44
33
22 ,,
dt
d
dt
d
dt
d 44
33
22 ,,
(2.42)
Lo que se pretende obtener son los valores de CA , DCA ,DA , 3 y 4 en función de los datos
geométricos y cinemáticos disponibles.
Así pues empleando la representación vectorial (2.15.c) en la ecuación (2.39) y reordenando
se obtienen las componentes real e imaginaria (en X e Y respectivamente) como:
04
2
4443
2
3332
2
222 CosSencCosSenbCosSena (2.43)
04
2
4443
2
3332
2
222 SenCoscSenCosbSenCosa (2.44)
Luego de la (2.48) y (2.49) se tienen dos ecuaciones con dos incógnitas en 3 y 4. De tal
forma que resolviendo el sistema mencionado se obtiene:
DBEA
FADC
QQQQ
QQQQ
3 (2.45)
DBEA
FBEC
QQQQ
QQQQ
4 (2.46)
siendo:
4
2
43
2
32
2
222
34
4
2
43
2
32
2
222
34
. ,.
. ,.
SencSenbSenCosaQ
CosbQCoscQ
CoscCosbCosSenaQ
SenbQSencQ
F
ED
C
BA
(2.47)
Finalmente las aceleraciones CA , DCA y DA se obtienen reemplazando (2.45) y (2.46) en
(2.41). Las componentes tangenciales y normales de las aceleraciones CA , DCA y DA se
obtienen proyectando los vectores de aceleración sobre los vectores unitarios
correspondientes. Tales vectores unitarios se pueden calcular (Ver Figuras 2.24 y 2.23)
conociendo los vectores de velocidad (para las componentes normales de la aceleración) y los
vectores de posición (para las componentes radiales de la aceleración).

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
8. Bibliografía
[1] R.L. Norton, “Diseño de Maquinaria”, 2ª Ed., McGraw Hill, México, 2000.
[2] J.E. Shigley, R.E. Gustavson. “Standard Handbook of machine design”. McGraw-Hill-
Digital Edition, Cap.4, 2004.
[3] A.G.Erdman y G.N Sandor, “Diseño de mecanismos. Análisis y síntesis”. 3ª Ed. McGraw-
Hill, Mexico, 1998.
[4] SAM 6.1, http://www.artas.nl
9. Problemas Resueltos y para Completar
En esta sección se ofrecen algunos problemas resueltos completamente (y otros que el alumno
debe completar) para adquirir fluencia en la resolución de los Trabajos Prácticos
correspondientes.
Problema tipo 2.1: En la Figura 2.PTN1 se muestra la posición inicial (y a su vez genérica)
de un mecanismo de cuatro barras. La barra a es la que lleva el movimiento de rotación con
respecto al origen A rotando con una velocidad constante de 2 rad/seg en sentido antihorario.
Figura 2.PTN1. Descripción del mecanismo de cuatro barras.
Las dimensiones de cada barra son:
mmdmmcmmbmma 95857050
La posición en el instante inicial del ángulo es 60º. Calcular la posición instante a instante
de los puntos C y D, empleando la metodología vectorial vista.
Solución Problema tipo 2.1: En primer lugar se debe determinar si las dimensiones y
características del mecanismo verifican la condición de Grashof-Gruebler:
155145
85709550
cbda
(P.1)
Se observa que la expresión (P.1) se cumple, entonces el mecanismo tendrá garantida la
rotación completa de uno de sus eslabones. Nótese que el eslabón más pequeño (el eslabón a)
puede girar los 360º.
La variación del ángulo vendrá dada por la siguiente expresión:

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
t
dtdt
d
0222
2
20
tt
2223180
60
(P.2)
Luego la posición del punto C viene dada por
tSenaSenaC
tCosaCosaC
Y
X
22
22
3..
3..
(P.3)
Para calcular la posición del punto D se necesitará conocer la variación temporal del ángulo
, lo cual se hace con las expresiones deducidas anteriormente. Es decir empleando las
ecuaciones (2.30) a (2.34).
Mientras que la posición del punto D vendrá dada por la siguiente expresión vectorial:
32RRR
D (P.4)
Puesto en coordenadas cartesianas será:
3
3
.
.
SenbCD
CosbCD
YY
XX
(P.5)
Donde 3 se calcula de la (2.32) para la configuración abierta, o sea:
D
FDEE
K
KKKKArcTan
2
42
2
3
Siendo
5221
2
5124
1
2
1
KCosKKK
SenK
KKCosKK
F
E
D
,
a
dK 1 ,
c
dK 2 ,
b
dK 4 ,
ab
badcK
2
2222
5
(P.6)
Se sugiere a los alumnos completar los siguientes cuadros:
F
E
D
K
K
K
1
K , 2
K , 4
K , 5
K
Para hallar la posición de los puntos C y D, complete la siguiente tabla:
Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Tiempo: t [s] CX CY DX DY
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Nota: Verifique, empleando el programa Mathematica o SAM ARTAS o Autodesk
Motion o el que tenga a disposición, las posiciones de los puntos C y D tal que no se
manifieste una inversión de movimiento por mal empleo de la función ArcTan.
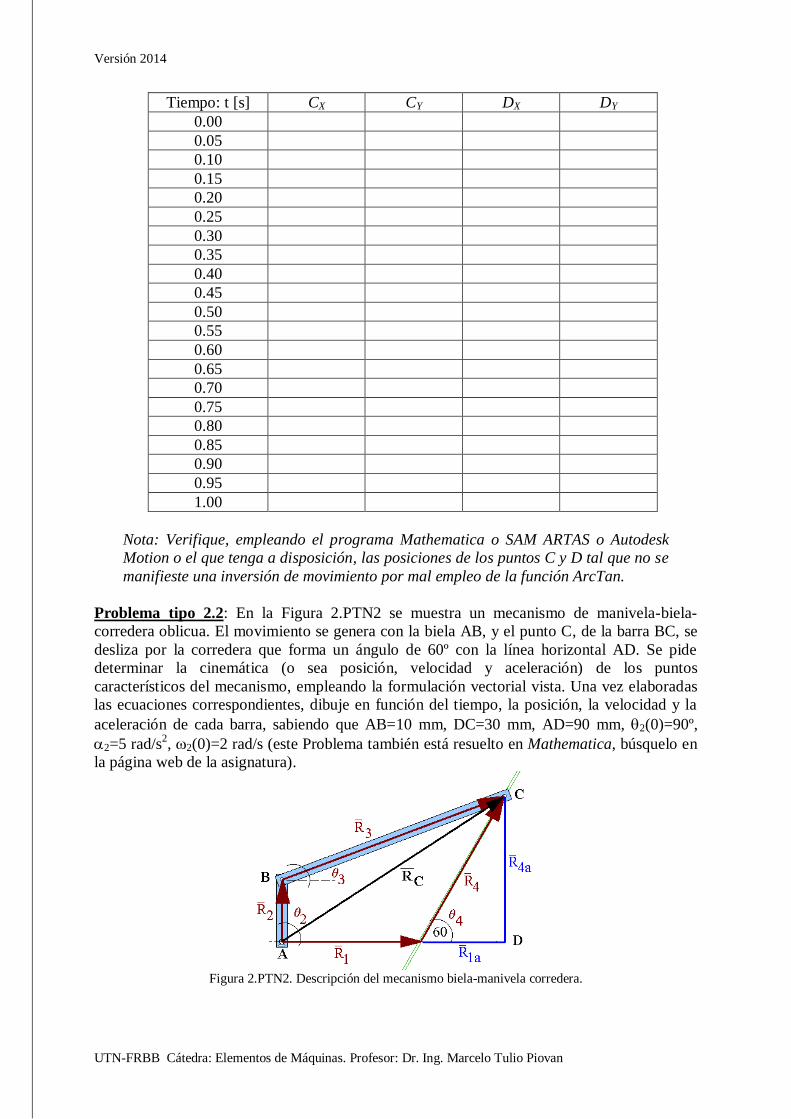
Problema tipo 2.2: En la Figura 2.PTN2 se muestra un mecanismo de manivela-biela-
corredera oblicua. El movimiento se genera con la biela AB, y el punto C, de la barra BC, se
desliza por la corredera que forma un ángulo de 60º con la línea horizontal AD. Se pide
determinar la cinemática (o sea posición, velocidad y aceleración) de los puntos
característicos del mecanismo, empleando la formulación vectorial vista. Una vez elaboradas
las ecuaciones correspondientes, dibuje en función del tiempo, la posición, la velocidad y la
aceleración de cada barra, sabiendo que AB=10 mm, DC=30 mm, AD=90 mm, 2(0)=90º,
2=5 rad/s2, 2(0)=2 rad/s (este Problema también está resuelto en Mathematica, búsquelo en
la página web de la asignatura).
Figura 2.PTN2. Descripción del mecanismo biela-manivela corredera.

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
Solución Problema Tipo 2.2: Para poder caracterizar este caso, empleando la metodología
vectorial se tienen que seguir los pasos explicados en los parágrafos 4, 5 y 6, correspondientes
a análisis de posición, velocidad y aceleración respectivamente.
Note que se tienen solo dos variables angulares: 2 y 3. Los argumentos de los vectores R1 y
R4 (o sea los ángulos 1 y 4) son constantes. El módulo de R1 es constante, pero el módulo
de R4 es variable.
Ahora bien, como la entrada de movimiento viene dada por la rotación temporal del ángulo
2, se debe integrar la siguiente ecuación diferencial:
2/0,20
0 iniciales scondicione lascon ,5
22
2
22
2
2
dt
d
dt
td (P.7)
Esto se efectúa de la siguiente manera:
255222
0
2
2
2
2
2
2
2 2
ttttdtddtdt
ddt
dt
dt
(P.8)
Integrando la última expresión de (P.8) se tiene:
2
22
5 2
2
ttt (P.9)
Esta última expresión es la ley de variación del ángulo de entrada de la manivela.
La ecuación vectorial de compatibilidad de desplazamiento del mecanismo es la siguiente:
01432 RRRR
Las posiciones iniciales de los vectores 4,..,1, jj
R son:
3//0,0
,0,3//0
4
22
3
21
SinDCABDCAD
ABTanDCAD
RR
RR (P.10)
Luego se debe efectuar la descomposición en las partes reales e imaginarias de la ecuación
(2.17) y resolver las incógnitas correspondientes que en este caso son ||R4|| y 3. Esta actividad
se deja propuesta a los alumnos para continuarla en forma algebraica. A modo de
comparación y ayuda en la resolución se deja en la página web de la asignatura el archivo de
Mathematica denominado “problema2_2.nb”.
10. Problemas propuestos
En todos los problemas analíticos propuestos a continuación se sugiere al alumno emplear los
programas de simulación de movimiento junto con el estudio detallado del algebra que puede
ser asistido mediante programas como Mathematica, Maple o Matlab. Tenga en cuenta que
los argumentos de los vectores, a menos que se indique lo contrario, siempre están
referidos al eje horizontal con sentido positivo hacia la derecha.
Problema 1.
Determine los grados de libertad de cada uno de los mecanismos que se ven en la siguiente
figura. Indique claramente la cantidad de eslabones, juntas cinemáticas y grados de libertad de
cada junta cinemática. Indique si el movimiento es posible o no en virtud de la condición de
Grashoff-Grübler, en tanto que sea aplicable.

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
(a) (b) (c)
(d) (e) (f)
Problema 2.
En la Figura adjunta se muestra el esquema de un mecanismo de retroceso rápido como el
usado en las limadoras. Empleando la metodología vectorial, determine la ley de variación de
la posición del punto B que desliza sobre la barra CD en la medida que la manivela AB está
rotando con un ángulo 2 y una velocidad 2 que se consideran datos. Los segmentos AB,
CA, CD y DE son considerados datos y tienen una longitud invariable. Los pasadores
ubicados en los puntos A y C están fijos y permiten la rotación de los eslabones a ellos
conectados.
Problema 3:
Con relación al Problema 2, sabiendo que 2 = 2 rad/seg, ||CA||=70 mm, ||AB||=25 mm,
||CB||=130mm, ||DE||=35 mm, en el instante inicial 2(0)=0, 4(0)=180º.
a) Determine las leyes de posición y velocidad del punto D y del punto E.
b) Grafique la posición del punto D.
c) Grafique la posición del punto E.
d) Grafique la velocidad del punto D y del punto E.
Problema 4.
En el mecanismo de corredera que se muestra en la Figura, el movimiento se genera por
medio de la manivela O2A, que rota respecto O2, y transmite con la biela AB un movimiento
horizontal a la corredera con centro de masa en B. Se pide que obtenga las ecuaciones de
posición y de velocidad para el punto B, sabiendo que en t=0, 2=75º. 4=90º en todo instante,
además tome los siguientes valores: a=60 mm, b=90 mm, c=75 mm, y =2 rad/seg para la
velocidad de la manivela R2. Note que el vector R4 tiene argumento y módulo fijos, mientras
que el vector R1 tiene argumento fijo (1=0º) y módulo variable en el tiempo.

Versión 2014
UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan
a) Grafique en el programa Mathematica (o el que disponga) la trayectoria del punto B.
b) Grafique en el programa Mathematica (o el que disponga) la velocidad del punto B.
Problema 5.
Con relación a la figura del problema anterior, evalúe toda la cinemática (es decir posición,
velocidad y aceleración) del mecanismo sabiendo que la manivela O2A empieza su
movimiento desde el reposo con una aceleración constante 2=2 rad/seg2 hasta llegar a una
velocidad de régimen de 10 rad/seg. Emplee los datos del problema anterior para su análisis.
Grafique la velocidad de los dos puntos característicos del mecanismo durante el tiempo que
se necesita para llegar a la velocidad de régimen.
Problema 6.
En la Figura adjunta se muestra un mecanismo de tijera de una etapa para elevación de
plataformas junto con un boceto que ejemplifica la síntesis del mecanismo. El funcionamiento
es el siguiente: Un actuador lineal mueve la junta deslizante del punto A en dirección al punto
C, lo que produce el movimiento vertical de la barra ED a través de la articulación en B. Las
barras AD y CE tienen la misma longitud de 1.5 m y están articuladas en el punto B ubicado
exactamente en la mitad. Conociendo los siguientes datos: OC=1.60 m, OA(0)=12 cm, la
velocidad de avance de A es 1 cm/seg, se pide:
a) hallar la relación vectorial de posiciones de los puntos B y D.
b) hallar el tiempo en que la distancia CD llega a 1.2 m.
Nota: designe Ud. cuales son las entidades variables y cuales las entidades constantes
(entiéndase por entidad a módulo o argumento de los vectores)