módulo i impresa - cecyteq … · en los resultados de aprendizaje y sitios de inserción laboral...
TRANSCRIPT

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo I
Submódulo I
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 2 de 21
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 21
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 4 de 21
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 5 de 21
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 21
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 21
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 21
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 21
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 10 de 21
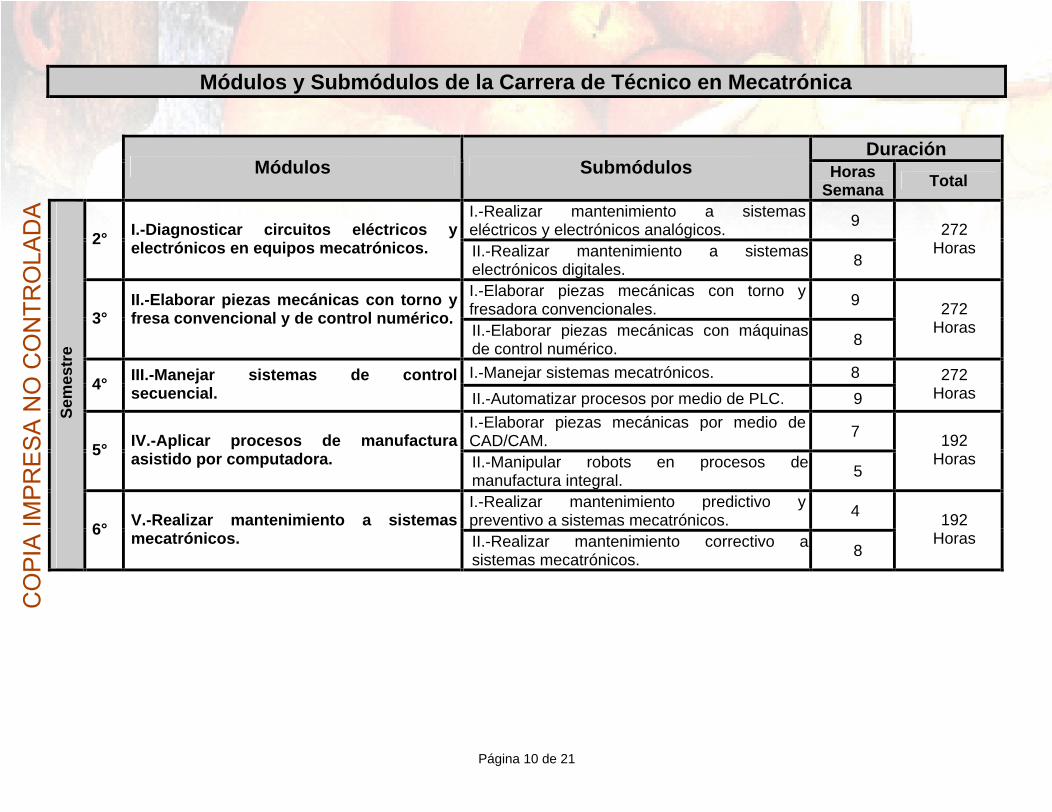
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 21
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 21
Programa de Estudio
Módulo I Diagnosticar circuitos eléctricos y electrónicos en
equipos mecatrónicos Duración 272 Horas
Submódulo I Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos Duración 9 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de realizar mantenimiento a sistemas eléctricos y electrónicos analógicos, empleando procedimientos normalizados.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Realizar pruebas de funcionamiento a circuitos eléctricos según procedimientos establecidos. 2. Realizar pruebas de funcionamiento a circuitos electrónicos analógicos según procedimientos
establecidos. 3. Localizar y corregir fallas en equipos electrónicos mediante un proceso de eliminación deductivo
y/o causas potenciales descritas en manuales y diagramas.
Estrategia de Aprendizaje
A) Encuadre grupal:
A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen diagnostico.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 13 de 21
Estrategia de Aprendizaje
B) Relación con el entorno:
El docente realiza visitas con los alumnos a empresas de servicios o manufactura en donde se pueda observar el proceso de
ensamblado, prueba y diagnostico de sistemas electrónicos.
C) Desarrollo de las esferas de competencia:
1. Realizar pruebas de funcionamiento a circuitos eléctricos según procedimientos establecidos.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar pruebas de funcionamiento de componentes eléctricos dentro de un sistema.
Realizar medición de variables eléctricas (Voltaje, corriente, resistencia y frecuencia), utilizando el multímetro, osciloscopio y generador de funciones para CA y CD según aplique.
Revisar las conexiones eléctricas de acuerdo a los procedimientos de mantenimiento.
Conectar componentes eléctricos a corriente directa y/o alterna en serie, paralelo y mixto.
Aplicar las medidas de seguridad al trabajar con equipo energizado.
Utilizar software de simulación para comprobación previa de funcionamiento de circuitos eléctricos.
Conocimientos sobre:
Leyes y principios eléctricos.
Notación científica.
Movimiento ondulatorio.
Actitudes:
Orden.
Responsabilidad.
El docente diseñará actividades para que el alumno demuestre la competencia: Realizar pruebas de funcionamiento a circuitos eléctricos según procedimientos establecidos.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 14 de 21
Estrategia de Aprendizaje
2. Realizar pruebas de funcionamiento a circuitos electrónicos analógicos según procedimientos establecidos.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar pruebas de funcionamiento de componentes electrónicos analógicos dentro de un sistema.
Conectar componentes electrónicos de acuerdo a un plano de conexión.
Interpretar las hojas características del fabricante y diagramas de conexión.
Utilizar dispositivos semiconductores (diodo, transistor, FET, regulador) en aplicaciones de rectificación, conmutación y regulación de voltaje.
Utilizar dispositivos tiristores como el DIAC TRIAC y SCR, PUT, UJT y opto acopladores en aplicaciones de manejo y control de potencia.
Utilizar amplificadores operacionales para el acondicionamiento y tratamiento de señales.
Utilizar software de simulación para comprobación previa de funcionamiento de circuitos electrónicos analógicos.
Conocimientos sobre:
Materiales semiconductores.
Dispositivos de estado sólido.
Amplificación de señales.
Atenuación de señales.
Filtrado de señales.
Fuentes de poder.
Actitudes:
Orden.
Responsabilidad.
Iniciativa.
El docente diseñara actividades para que el alumno demuestre la competencia: Realizar pruebas de funcionamiento a circuitos electrónicos analógicos según procedimientos establecidos.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 15 de 21
Estrategia de Aprendizaje
3. Localizar y corregir fallas en equipos electrónicos mediante un proceso de eliminación deductivo y/o causas potenciales
descritas en manuales y diagramas.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar mantenimiento en equipos y sistemas electrónicos analógicos.
Soldar y desoldar componentes eléctricos y electrónicos.
Utilizar la ropa y equipo de seguridad durante el trabajo de acuerdo a las características del mismo.
Seleccionar los materiales equipos y herramientas para llevar a cabo el mantenimiento.
Limpiar los equipos conforme a lo estipulado en el reporte de mantenimiento.
Realizar los reportes necesarios (de actividades realizadas, de fallas).
Diagnosticar funcionamiento de componentes eléctricos y electrónicos analógicos.
Conocimientos sobre:
Tipos de mantenimiento.
Procesos de mantenimiento.
Llenado de reportes.
Normas de seguridad aplicables.
Técnicas de mantenimiento.
Actitudes:
Orden.
Responsabilidad.
Iniciativa.
El docente diseñara actividades para que el alumno demuestre la competencia: Localizar y corregir fallas en equipos electrónicos mediante un proceso de eliminación deductivo y/o causas potenciales descritas en manuales y diagramas.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 16 de 21
Estrategia de Aprendizaje
D) Cierre del submódulo.
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar actividades integradoras sobre el diagnostico de fallas de un sistema; en equipos y de forma individual donde el alumno demuestre todas las capacidades del submódulo.
E) Recursos materiales de apoyo:
Tablilla de proyectos Projectboard.
Resistencias de ½ W, 1W, 10W, de valores comerciales.
Potenciómetros de diferentes valores (1K, 10K, 22K, 100K, 220K, 1M, 10M)
Capacitores (electrolíticos, cerámicos, poliéster, No polarizados) de diferentes valores.
Cable de varios colores y calibres.
Alambre telefónico.
Cinta de aislar.
Diodos rectificadores (1A y 3A).
Diodos zener de 1W (2.2V, 3.3V, 5.1V, 9.1V, 12V).
Reguladores integrados (LM7805, LM317, LM337, LM7812, LM7912, LM7905).
Diodos emisores de luz.
Foto diodos.
Transistores NPN y PNP de pequeña señal.
Transistores NPN y PNP de gran señal.
Fototransistores NPN.
Fototransistores PNP.
Fotorresistencias.
Foto celdas.
Amplificadores operacionales (LM741, LM324, LM311, TL084).
FET´S canal N y canal P.
MOSFET´S Canal N y canal P.
DIAC´S (de diferente voltaje de disparo).
SCR´S (de 3A, 8A, 15A).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 17 de 21
Estrategia de Aprendizaje
TRIAC´S (de 3A, 8A, 15A).
UJT´S.
PUT´S.
Osciloscopio de doble trazo.
Multímetro digital.
Generador de funciones de 10Mhz.
Estación para soldar con regulación de temperatura.
Soldadura 60/40.
Tablilla fenólica perforada para soldar.
Herramienta y equipo de seguridad.
Opto acopladores (a fototransistor, a foto triad).
Computadora personal.
Software para simulación de circuitos electrónicos digitales.
Fuente de alimentación de CA. Variable.
Fuente de alimentación de CD. Variable.
Juego de caimanes.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 18 de 21
Evaluación de Competencias
Actividad: El alumno en forma individual realizará mantenimiento a un circuito electrónico analógico.
Evidencias por desempeño 30%: 1. Las pruebas de funcionamiento a circuitos eléctricos según procedimientos establecidos realizadas. 2. Las pruebas de funcionamiento a circuitos electrónicos analógicos según procedimientos establecidos realizadas. 3. Las fallas en equipos electrónicos mediante un proceso de eliminación deductivo y/o causas potenciales descritas en
manuales y diagramas localizadas y corregidas.
Evidencias por producto 60%: 1. Las pruebas de funcionamiento a circuitos eléctricos según procedimientos establecidos realizadas. 2. Las pruebas de funcionamiento a circuitos electrónicos analógicos según procedimientos establecidos realizadas. 3. Las fallas en equipos electrónicos mediante un proceso de eliminación deductivo y/o causas potenciales descritas en
manuales y diagramas localizadas y corregidas.
Evidencias de conocimiento 0%:
Evidencias de actitud 10%:
Responsabilidad: Evidencias por desempeño:
1. Las pruebas de funcionamiento a circuitos eléctricos según procedimientos establecidos realizadas. 2. Las pruebas de funcionamiento a circuitos electrónicos analógicos según procedimientos establecidos realizadas. 3. Las fallas en equipos electrónicos mediante un proceso de eliminación deductivo y/o causas potenciales descritas en
manuales y diagramas localizadas y corregidas.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 19 de 21
Fuentes de Información
Boylestad Robert & Nashelsky Louis, Electrónica Teoría de Circuitos y Dispositivos Electrónicos, Pearson.
Boylestad Robert, Teoria de Circuitos y Dispositivos Electrónicos (8°/ Ed).Prentice Hall.
Boylestad Robert, Fundamentos de Electrónica (4°/ Ed),Pearson.
Boylestad, Introducción al Análisis de Circuitos, (10°/Ed).Prentice Hall.
Cooper, Kenneth & Helfrick Albert, Instrumentación Electrónica Moderna y Técnicas de Medición, Pearson.
Dawes ,Chester, Tratado de Electricidad 1,Corriente alterna,(14° Ed),Gustavo Gili
Dawes ,Chester, Tratado de Electricidad 1,Corriente continua, (13° Ed).Gustavo Gili
Floyd Thomas, Fundamentos de Electrónica Digital,Limusa
Maloney Timothy, Electrónica Industrial Moderna, (3°/Ed.), Pearson.
Malvino, Principios de Electrónica, (6°/ Ed) Mc. Graw Hill.
Rashid, Muhammad, Electrónica de Potencia, Circuitos, Dispositivos y Aplicaciones, Prentice Hall. (3°/edición),
Wolf Stanley, Guía para Mediciones Electrónicas y Prácticas de Laboratorio Prentice Hall. (2°/ Ed),
Donovan Robert, Electrónica Digital, Cecsa
Dorf Richard, Circuitos Eléctricos, Alfaomega
Rutkowski, Electrónica Analógica del Estado Sólido, Paraninfo
Wolf,Gerhard, Electrónica Digital, Marcombo
Zbar Paul, Prácticas de Electrónica Industrial, Alfaomega.
Zbar Paul, Prácticas de Electrónica, Alfomega.
Zbar, Paul, Prácticas de Electricidad, Alfaomega.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 20 de 21
Glosario
ADC: Convertidor analógico-digital.
AMPLIFICADOR OPERACIONAL: Es un dispositivo amplificador de la diferencia de sus dos entradas, con una alta ganancia, una impedancia de entrada muy alta y una baja impedancia de salida.
BJT TRANSISTOR BIPOLAR: Elemento semiconductor formado por tres capas semiconductoras NPN o PNP.
CIRCUITO PARALELO: Circuito por donde el total de la corriente se divide por varias ramas y/o elementos. Circuito que tiene más de un camino para la corriente.
CIRCUITO SERIE: Circuito por donde circula la misma corriente por todos los elementos. Circuito que tiene un único camino para la corriente.
CORRIENTE ALTERNA (CA): Corriente eléctrica que cambia su amplitud y polaridad en forma periódica con el tiempo.
CORRIENTE CONTINUA (CC): Modo de suministro de energía eléctrica donde la polaridad de la tensión se mantiene constante. (caso contrario a la corriente alterna)
CORRIENTE: Cantidad de carga que circula por un conductor por unidad de tiempo.
DAC: Convertidor digital-analógico.
DIAC: Dispositivo semiconductor que puede conducir en ambos sentidos.
DIODO: Elemento semiconductor formado por un material N y un P.
FET: Transistor de efecto de campo.
FRECUENCIA: Cantidad de ciclos por segundo de una señal medida en Hertz.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 21 de 21
Glosario
MULTÍMETRO: Instrumento de múltiples propósitos, que se puede usar para medir resistencias, voltajes, corrientes.
OPTOACOPLADOR: El Opto acoplador es un dispositivo que se compone de un diodo LED y un fototransistor, de manera de que cuando el diodo LED emita luz, ésta ilumine el fototransistor y conduzca. Estos dos elementos están acoplados de la forma más eficiente posible.
OSCILOSCOPIO: Instrumento utilizado para la medición de la amplitud y período de señales de corriente alterna. El osciloscopio muestra en la pantalla la forma de onda medida, su forma y su periodo.
POTENCIA: Es la energía (o trabajo) dividido por el tiempo.
PUT: Transistor de union programable.
RECTIFICADOR: Circuito que convierte la corriente Alterna (C.A.) en corriente continua (C.C.).
REGULADOR DE VOLTAJE: Circuito diseñado para mantener una tensión constante, independientemente del valor de la carga.
RESISTENCIA: La oposición que presenta un material al paso de la corriente eléctrica.
SCR: Rectificador controlado de silicio.
TRIAC: Transistor de Corriente Alterna.
UJT: Transistor monounión.
VOLTAJE: Fuerza electromotriz capaz de hacer circular corriente a través de un material.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo I
Submódulo II
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 2 de 20
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 20
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 4 de 20
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 5 de 20
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 6 de 20
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 20
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 20
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 20
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 10 de 20
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 20
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 12 de 20
Programa de Estudio
Módulo I Diagnosticar circuitos eléctricos y electrónicos en
equipos mecatrónicos. Duración 272 Horas
Submódulo II Realizar mantenimiento a sistemas electrónicos digitales. Duración 8 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de realizar mantenimiento a sistemas electrónicos digitales, empleando procedimientos normalizados.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Realizar pruebas de funcionamiento a circuitos electrónicos digitales según procedimientos establecidos.
2. Localizar y corregir fallas en equipos electrónicos digitales mediante un proceso de eliminación deductivo y/o causas potenciales descritas en manuales y diagramas.
Estrategia de Aprendizaje
A) Encuadre grupal:
A través de una exposición el maestro deberá:
Presentar el submódulo
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen diagnostico.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 13 de 20
Estrategia de Aprendizaje
B) Relación con el entorno:
Realizar una visita a una empresa de servicios o manufactura en donde se pueda observar el proceso de ensamblado, prueba y diagnóstico de sistemas electrónicos.
C) Desarrollo de las esferas de competencia:
1. Realizar pruebas de funcionamiento a circuitos electrónicos digitales según procedimientos establecidos.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar pruebas de funcionamiento de componentes electrónicos digitales dentro de un sistema.
Conectar componentes electrónicos de acuerdo a un plano de conexión.
Interpretar las hojas características del fabricante de elementos electrónicos y los diagramas de conexión.
Realizar circuitos combinatorios que incluyan compuertas lógicas (NOT, AND, OR, NAND, NOR, OR-EX, NOR-EX) de acuerdo a un diagrama de conexión.
Realizar circuitos secuenciales temporizados para el control de procesos que incluyan flip-flops (SR, D, J-K).
Utilizar medios de almacenamiento (Memorias) como parte de un sistema.
Utilizar convertidores Analógico-Digital y Digital-Analógico para el acondicionamiento de señales entre sistemas electrónicos digitales y analógicos.
Utilizar microcontroladores para el desarrollo de sistemas digitales integrales.
Utilizar software de simulación para comprobación previa de funcionamiento de circuitos electrónicos digitales.
Conocimientos sobre:
Conversiones entre los diferentes sistemas de numeración Binario, Octal y Hexadecimal.
Familias lógicas.
Manejo de manuales.
Lenguaje de programación ensamblador (de acuerdo al microcontrolador elegido).
Manejo de simulador de circuitos electrónicos.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 14 de 20
Estrategia de Aprendizaje Actitudes:
Orden.
Responsabilidad.
Iniciativa.
El docente diseñara actividades para que el alumno demuestre la competencia: Realizar pruebas de funcionamiento a circuitos electrónicos digitales según procedimientos establecidos.
2. Localizar y corregir fallas en equipos electrónicos digitales mediante un proceso de eliminación deductivo y/o causas potenciales descritas en manuales y diagramas.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Dar mantenimiento a equipos y sistemas electrónicos digitales.
Soldar y desoldar componentes eléctricos y electrónicos.
Utilizar la ropa y equipo de seguridad durante el trabajo de acuerdo a las características del mismo.
Seleccionar los materiales equipos y herramientas para llevar a cabo el mantenimiento.
Limpiar los equipos conforme a lo estipulado en el reporte de mantenimiento.
Realizar los reportes necesarios (de actividades realizadas, de fallas).
Utilizar equipo e instrumentos de diagnostico para la solución de problemas en circuitos electrónicos digitales (punta lógica y analizador lógico).
Conocimientos sobre:
Tipos de mantenimiento.
Procesos de mantenimiento.
Llenado de reportes.
Normas de seguridad aplicables.
Técnicas de mantenimiento.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 15 de 20
Estrategia de Aprendizaje
Actitudes:
Orden.
Responsabilidad.
Iniciativa.
El docente diseñará actividades para que el alumno demuestre la competencia: Localizar y corregir fallas en equipos electrónicos digitales mediante un proceso de eliminación deductivo y/o causas potenciales descritas en manuales y diagramas.
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora en equipos donde el alumno demuestre todas las capacidades del submódulo.
E) Recursos materiales de apoyo:
Tablilla de proyectos Projectboard.
Resistencias de ½ W de valores comerciales.
Capacitores (electrolíticos, cerámicos, poliéster).
Cable de varios colores y calibres.
Alambre telefónico de varios colores.
Cinta de aislar.
Diodos emisores de luz de varios colores.
Circuitos Integrados (Compuertas lógicas).
Circuitos Integrados (Flips-flops).
Circuitos Integrados (ADC y DAC).
Circuitos Integrados (Microcontroladores).
Programador de memorias y microcontroladores.
Punta lógica.
Fuente de alimentación de CD variable.
Generador de funciones.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 16 de 20
Estrategia de Aprendizaje
Analizador lógico
Estación para soldar con regulación de temperatura.
Soldadura 60/40.
Tablilla fenólica perforada para soldar.
Herramienta y equipo de seguridad.
Computadora personal.
Software para simulación de circuitos electrónicos digitales.
Software para programación y simulación de microcontroladores.
Juego de caimanes.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 17 de 20
Evaluación de Competencias
Actividad: El alumno realizará actividades de localización de fallas o anomalías de un circuito electrónico digital.
Evidencias por desempeño 30%: 1. Las pruebas de funcionamiento a circuitos electrónicos digitales según procedimientos establecidos realizadas. 2. Las fallas en equipos electrónicos digitales mediante un proceso de eliminación deductivo y/o causas potenciales
descritas en manuales y diagramas localizadas y corregidas.
Evidencias por producto 60%: 1. Las pruebas de funcionamiento a circuitos electrónicos digitales según procedimientos establecidos realizadas. 2. Las fallas en equipos electrónicos digitales mediante un proceso de eliminación deductivo y/o causas potenciales
descritas en manuales y diagramas localizadas y corregidas.
Evidencias de conocimiento 0%:
Evidencias de actitud 10%:
Responsabilidad: Evidencias por desempeño.
1. Las pruebas de funcionamiento a circuitos electrónicos digitales según procedimientos establecidos realizadas. 2. Las fallas en equipos electrónicos digitales mediante un proceso de eliminación deductivo y/o causas potenciales
descritas en manuales y diagramas localizadas y corregidas.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 18 de 20
Fuentes de Información
Boylestad Robert & Nashelsky Louis,Electrónica Teoría de Circuitos y Dispositivos Electrónicos,, Pearson.
Boylestad Robert, Teoría de Circuitos y Dispositivos Electrónicos (8°/ Ed).Prentice Hall.
Boylestad Robert, Fundamentos de Electrónica (4°/ Ed),Pearson.
Boylestad, Introducción al Análisis de Circuitos,(10°/Ed).Prentice Hall.
Cooper, Kenneth & Helfrick Albert, Instrumentación Electrónica Moderna y Técnicas de Medición, Pearson.
Dawes ,Chester, Tratado de Electricidad 1,Corriente alterna,(14° Ed),Gustavo Gili
Dawes ,Chester, Tratado de Electricidad 1,Corriente continua, (13° Ed).Gustavo Gili
Floyd Thomas, Fundamentos de Electrónica Digital,Limusa
Maloney Timothy, Electrónica Industrial Moderna, (3°/Ed.), Pearson.
Malvino, Principios de Electrónica, (6°/ Ed) Mc. Graw Hill.
Rashid, muhammad, Electrónica de Potencia, Circuitos, Dispositivos y Aplicaciones, Prentice Hall. (3°/edición),
Wolf Stanley, Guía para Mediciones Electrónicas y Prácticas de Laboratorio, Prentice Hall (2°/ Ed),.
Donovan Robert, Electrónica Digital, Cecsa
Dorf Richard, Circuitos Eléctricos, Alfaomega
Rutkowski, Electrónica Analógica del Estado Sólido, Paraninfo
Wolf,Gerhard, Electrónica Digital, Marcombo
Zbar Paul, Prácticas de Electrónica Industrial, Alfaomega.
Zbar Paul, Prácticas de Electrónica, Alfomega.
Zbar, Paul, Prácticas de Electricidad, Alfaomega.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 19 de 20
Glosario
ADC: Convertidor analógico-digital.
AMPLIFICADOR OPERACIONAL: Es un dispositivo amplificador de la diferencia de sus dos entradas, con una alta ganancia, una impedancia de entrada muy alta y una baja impedancia de salida.
BJT TRANSISTOR BIPOLAR: Elemento semiconductor formado por tres capas semiconductoras NPN o PNP.
CIRCUITO PARALELO: Circuito por donde el total de la corriente se divide por varias ramas y/o elementos. Circuito que tiene más de un camino para la corriente.
CIRCUITO SERIE: Circuito por donde circula la misma corriente por todos los elementos. Circuito que tiene un único camino para la corriente.
CORRIENTE ALTERNA (CA): Corriente eléctrica que cambia su amplitud y polaridad en forma periódica con el tiempo.
CORRIENTE CONTINUA (CC): Modo de suministro de energía eléctrica donde la polaridad de la tensión se mantiene constante (caso contrario a la corriente alterna).
CORRIENTE: Cantidad de carga que circula por un conductor por unidad de tiempo.
DAC: Convertidor digital-analógico.
DIAC: Dispositivo semiconductor que puede conducir en ambos sentidos.
DIODO: Elemento semiconductor formado por un material N y un P
FET: Transistor de efecto de campo.
FRECUENCIA: Cantidad de ciclos por segundo de una señal medida en Hertz.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 20 de 20
Glosario
MULTÍMETRO: Instrumento de múltiples propósitos, que se puede usar para medir resistencias, voltajes y corrientes.
OPTOACOPLADOR: El Optoacoplador es un dispositivo que se compone de un diodo LED y un fototransistor, de manera de que cuando el diodo LED emita luz, ésta ilumine el fototransistor y conduzca. Estos dos elementos están acoplados de la forma más eficiente posible.
OSCILOSCOPIO: Instrumento utilizado para la medición de la amplitud y período de señales de corriente alterna. El osciloscopio muestra en la pantalla la forma de onda medida, su forma y su periodo.
POTENCIA: Es la energía (o trabajo) dividido por el tiempo.
PUT: Transistor de union programable.
RECTIFICADOR: Circuito que convierte la corriente Alterna (C.A.) en corriente continua (C.C.).
REGULADOR DE VOLTAJE: Circuito diseñado para mantener una tensión constante, independientemente del valor de la carga.
RESISTENCIA: La oposición que presenta un material al paso de la corriente eléctrica.
SCR: Rectificador controlado de silicio.
TRIAC: Transistor de Corriente Alterna.
UJT: Transistor monounión.
VOLTAJE: Fuerza electromotriz capaz de hacer circular corriente a través de un material.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo II
Submódulo I
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 2 de 21
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 3 de 21
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 4 de 21
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 5 de 21
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 21
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 21
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 21
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 21
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 10 de 21
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 21
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 21
Programa de Estudio
Módulo II
Elaborar piezas mecánicas con torno y fresa convencional y de control numérico. Duración 272 Horas
Submódulo I Elaborar piezas mecánicas con torno y fresadora convencionales. Duración 9 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de Aplicar las técnicas adecuadas en las diferentes operaciones de torneado y fresado para maquinar piezas mecánicas con precisión.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Aplicar las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas.
2. Aplicar técnicas de fresado básico para la realización de piezas mecánicas.
Estrategia de Aprendizaje
A) Encuadre grupal:
A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 13 de 21
Estrategia de Aprendizaje
B) Relación con el entorno:
El docente realiza visitas con los alumnos a empresas de servicios o manufactura en donde se pueda observar el proceso de
maquinado de piezas mecánicas.
C) Desarrollo de las esferas de competencia:
1. Aplicar las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Operar el torno paralelo.
Convertir unidades.
Revisar las condiciones de operación del torno.
Seleccionar la secuencia de maquinado de acuerdo con las especificaciones.
Seleccionar los instrumentos de medición, las herramientas de corte y los dispositivos de sujeción de acuerdo al material y a las condiciones de maquinado.
Montar el material de acuerdo a las características del mismo.
Montar la herramienta de corte de acuerdo con la altura del eje de rotación del torno, la geometría del material y la secuencia del maquinado.
Ajustar las revoluciones por minuto y el avance de acuerdo con las características del material y tipo de maquinado.
Ajustar el ángulo de inclinación de acuerdo con las especificaciones.
Aplicar la profundidad de corte de acuerdo a las especificaciones y a las características del material.
Verificar la geometría del material de acuerdo a sus especificaciones, antes de ser desmontada.
Entregar pieza terminada limpia y libre de rebaba.
Aplicar los lineamientos de seguridad e higiene durante el maquinado.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 14 de 21
Estrategia de Aprendizaje
Conocimientos sobre:
Hojas de proceso.
Instrumentos de medición.
Sistemas de unidades.
Tipos de herramientas.
Partes principales del torno.
Tipos de torneado.
Tipos de conos.
Tipos de roscas.
Actitudes:
Limpieza.
Orden.
Responsabilidad.
El docente diseñará una actividad para que el alumno demuestre la competencia: Aplicar las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas.
2. Aplicar técnicas de fresado básico para la realización de piezas mecánicas.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Operar la fresadora.
Convertir unidades
Revisar la fresadora en condiciones de operación
Seleccionar la secuencia de fresado de acuerdo con las especificaciones.
Seleccionar los instrumentos de medición, las herramientas de corte y los dispositivos de sujeción de acuerdo al material y a las condiciones de maquinado.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 15 de 21
Estrategia de Aprendizaje
Montar el material de acuerdo a las características del mismo.
Montar la herramienta de corte de acuerdo con la secuencia de fresado.
Montar los dispositivos de sujeción de acuerdo con las herramientas de corte y las características del material.
Ajustar las revoluciones por minuto y el avance de acuerdo con las características del material y tipo de maquinado.
Aplicar la profundidad de corte de acuerdo a las especificaciones y a las características del material.
Verificar la geometría del material de acuerdo a sus especificaciones, antes de ser desmontada.
Entregar pieza terminada limpia y libre de rebaba.
Aplicar los lineamientos de seguridad e higiene durante el maquinado.
Conocimientos sobre:
Hojas de proceso.
Instrumentos de medición.
Sistemas de unidades.
Tipos de herramientas de corte.
Partes principales de la fresa.
Tipos de fresado.
Actitudes:
Limpieza.
Orden.
Responsabilidad.
El docente diseñará una actividad para que el alumno demuestre la competencia: Aplicar técnicas de fresado básico para la realización de piezas mecánicas.
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora sobre el ensamble de piezas realizadas en torno y/o fresadora por equipos y de forma individual donde el alumno demuestre todas las capacidades del submódulo.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 16 de 21
Estrategia de Aprendizaje
E) Recursos materiales de apoyo:
Caja portaherramientas.
Tornos convencionales.
Fresadoras convencionales.
Prensas.
Calibrador vernier 0-150mm.
Micrómetro de exteriores 0-25mm LEG 0.01mm.
Micrómetro de exteriores 25-50mm LEG 0.01mm.
Micrómetro de exteriores 50-75mm LEG 0.01mm.
Micrómetro de exteriores 75-100mm LEG 0.01mm.
Micrómetro de profundidades 0-75mm LEG 0.01mm.
Micrómetro de interiores de 5 -30 mm LEG 0.01 mm.
Micrómetro de interiores de 25 -50 mm LEG 0.01 mm.
Escuadra de espaldón de 75x100mm.
Regla escala metálica de 150mm.
Juego de paralelas (diversas medidas).
Base magnética.
Indicador de carátula tipo vástago.
Cortador de 2 filos diámetro 20mm.
Cortador de 2 filos diámetro 10mm.
Cortador de 2 filos diámetro 6mm.
Cortador de 2 filos diámetro 12mm.
Cortador de 2 filos diámetro 16mm.
Cortador de 4 filos diámetro 20mm.
Cortador de 4 filos diámetro 10mm.
Cortador de 4 filos diámetro 6mm.
Cortador de 4 filos diámetro 12mm.
Cortador de 4 filos diámetro 16mm.
Cortador ranura en T.
Cortador angular de 60º.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 17 de 21
Estrategia de Aprendizaje
Barra porta inserto para desbaste exterior.
Barra porta inserto para desbaste interior.
Barra porta inserto para acabado exterior.
Barra porta inserto para acabado interior.
Barra porta inserto para rasurado.
Moleteador.
Insertos para desbaste.
Insertos para acabado.
Cortador plano porta insertos 100mm, 150 mm.
Martillo de plástico.
Martillo de bronce.
Juego de limas.
Boquillas para fresadora (6, 10, 12, 16, 20 o las aplicables).
Llave de nariz.
Llave para prensa tipo dado.
Llave combinada dado y española 19mm (o la aplicable).
Martillo de acero.
Calibrador de espesores.
Calibrador de alturas.
Mesa de calibración.
Lentes de seguridad.
Rayador.
Desarmadores plano y de cruz (diferentes medidas).
Calzas angulares para prensa.
Calza redonda de bronce 10 mm.
Brochas.
Brocha de ixtle.
Aceitera.
Juego de llaves allen.
Flexómetros.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 18 de 21
Evaluación de Competencias
Actividad: El alumno en forma individual realizará piezas mecánicas utilizando torno paralelo y fresadora.
Evidencias por desempeño 30%: 1. Las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas aplicadas. 2. Las técnicas de fresado básico para la realización de piezas mecánicas aplicadas.
Evidencias por producto 60%: 1. Las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas aplicadas. 2. Las técnicas de fresado básico para la realización de piezas mecánicas aplicadas.
Evidencias de conocimientos 0%:
Evidencias de actitudes 10%: Responsabilidad: Evidencias por desempeño
1. Las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas aplicadas.
2. Las técnicas de fresado básico para la realización de piezas mecánicas aplicadas.
Orden: Evidencias por desempeño
1. Las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas aplicadas.
2. Las técnicas de fresado básico para la realización de piezas mecánicas aplicadas.
Limpieza: Evidencias por producto
1. Las técnicas de torneado cilíndrico, torneado cónico y roscado en la producción de piezas mecánicas aplicadas.
2. Las técnicas de fresado básico para la realización de piezas mecánicas aplicadas.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 19 de 21
Fuentes de Información
John l. Feirer, (1999), Maquinado de metales con máquinas herramientas,
Ed. CECSA.14ª edición
Appold, Feiler, Reinmard, Scmmit,(1993),Tecnología de los metales, Editorial Reverte Edición DGETI.
Henry Ford, Teoría del taller, Editorial ,Gustavo Gili.
Jütz,Scharkus,Lobert,(1992), Prontuario de metales, Editorial Reverte Edición DGETI.
Kibbe, Neely, Meyer, White,(1994), Manual de máquinas Herramientas. Editorial Limusa. Prácticas de Taller,
Nadreau Robert,(1984), El torno y la fresa, Ediciones G. Gili S.A.
Pollack Heman W, (1988), Manual de Máquinas Herramientas, Prentice Hall Hispano Americano S.A.
George W. Genevro/stephen s. Heineman,(1994), Manual de Maquinas Herramientas, Ed. Prentice Hall.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 20 de 21
Glosario
ABRASIVO: Sustancia de dureza que reducida a polvo sirve para afinar superficies de los cuerpos.
ACABADO: Mecanizado perfecto.
ADHERENCIA: Acción y efecto de adherir o pegarse una cosa con otra.
ANTISÉPTICO: Que evita la putrefacción.
BASTO: Sin pulimento.
BRIDAS: Elemento de agarre.
CHUCK: Parte del torno donde se fijo la pieza.
CORINDON: Abrasivo artificial.
CROQUIS: Dibujo hecho a pulso.
ENSAMBLE: Unir piezas encajadas una en otra.
LISAS: Pulidas.
MECANIZAR: Trabajo de arrancar viruta.
PINZAS AJUSTABLES: Parte de agarre de una máquina.
PLATO MAGNÉTICO: Elemento de sujeción de la rectificadora.
PRENSA: Elemento de sujeción.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 21 de 21
Glosario
PULIDAS: Terminado que se le hace a los metales.
ROZAMIENTO O FRICCIÓN: Pasar una cosa frotando la superficie de otra.
ASERRÍN: Conjunto de partículas que se desprenden de la madera u otro material que se cierra.
SUJECIÓN: Fijar una pieza.
TAMIZ: Cedazo muy fino.
TENAZ: Que opone mucha resistencia a romperse o deformarse.
VIRUTA: Hoja delgada sacada con la herramienta de corte al mecanizar una pieza metálica.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo II
Submódulo II
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 2 de 22
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 22
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 4 de 22
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 5 de 22
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 6 de 22
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 7 de 22
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 22
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 22
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
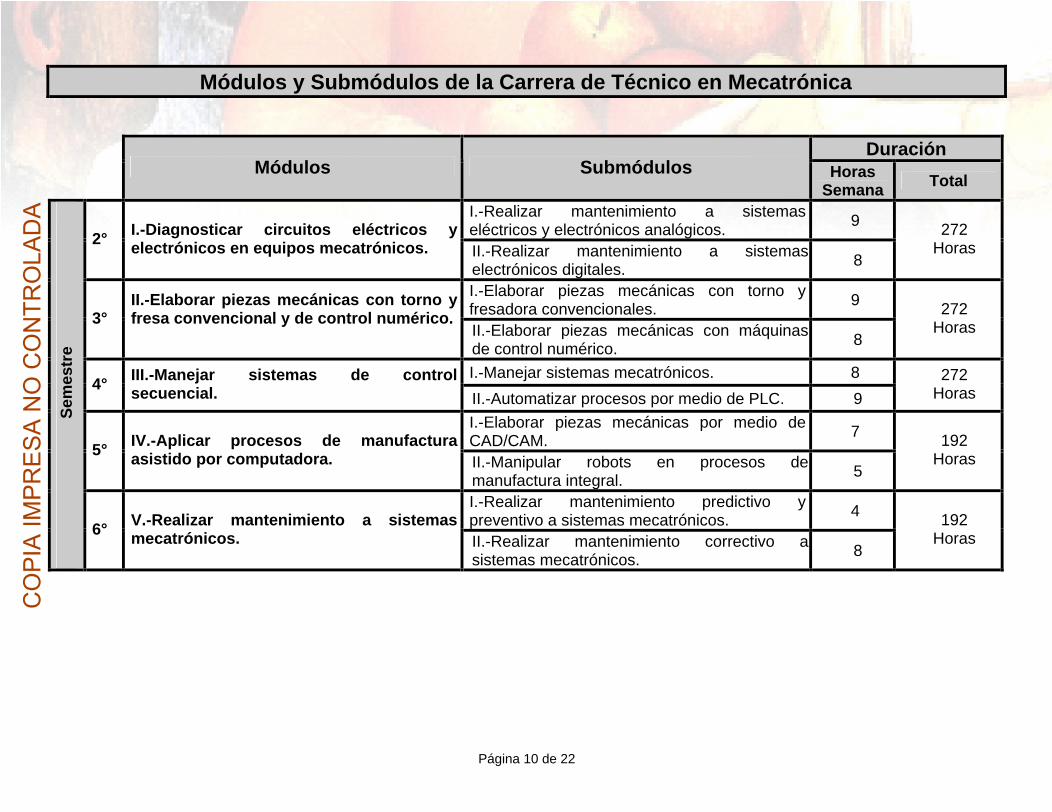
Página 10 de 22
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
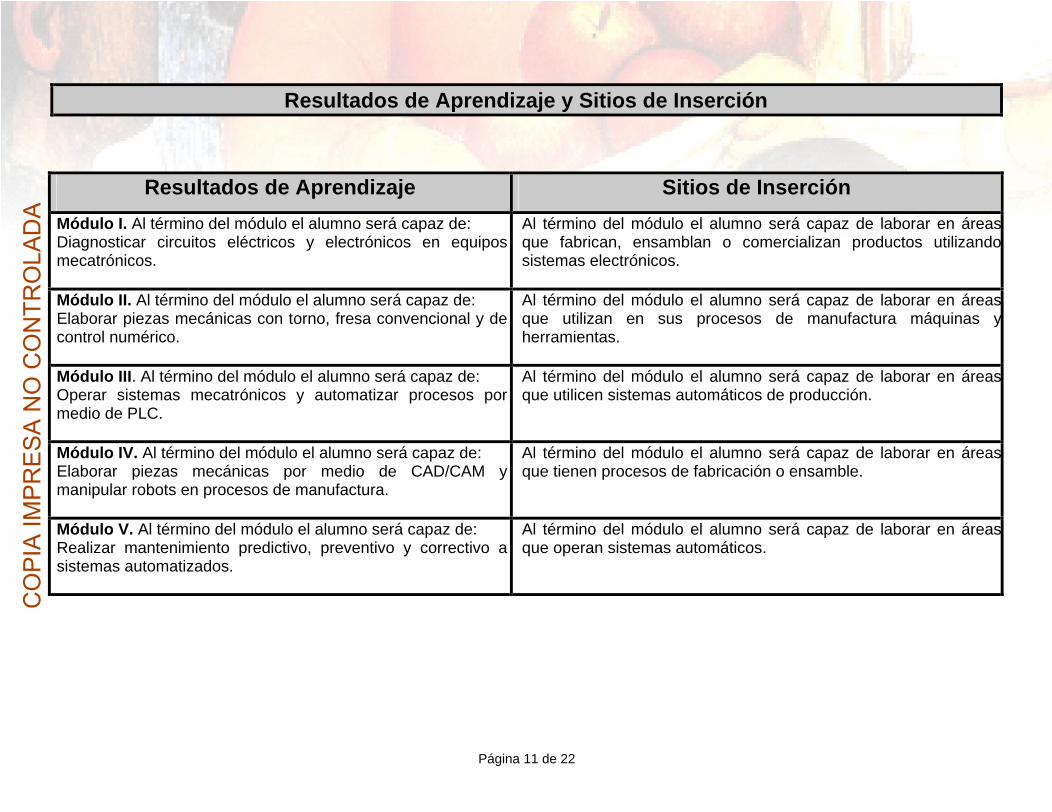
Página 11 de 22
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 22
Programa de Estudio
Módulo II Elaborar piezas mecánicas con torno y fresa
convencional y de control numérico. Duración 272 Horas
Submódulo II Elaborar piezas mecánicas con máquinas de control numérico.
Duración 8 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de realizar piezas mecánicas utilizando máquinas de control numérico.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Realizar el programa del maquinado de piezas mecánicas por control numérico.
2. Fabricar piezas mecánicas en centro de maquinado de control numérico.
3. Fabricar piezas mecánicas en torno de control numérico.
Estrategia de Aprendizaje
A) Encuadre grupal: A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 13 de 22
Estrategia de Aprendizaje
B) Relación con el entorno:
El docente realizará visitas con los alumnos a empresas de servicios o manufactura en donde se pueda observar el proceso de maquinado de piezas mecánicas utilizando maquinaria de control numérico.
C) Desarrollo de las esferas de competencia:
1. Realizar el programa del maquinado de piezas mecánicas por control numérico.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Simular el programa de control numérico.
Manejar lenguaje de control numérico.
Determinar si el dibujo o la pieza recibida esta de acuerdo con las instrucciones del procedimiento.
Determinar las medidas del producto están de acuerdo con las especificaciones.
Realizar el programa de control numérico del producto de acuerdo con los estándares de especificación.
Crear la librería de herramientas de acuerdo con la geometría de la pieza.
Verificar la ruta de maquinado de acuerdo con la geometría de la pieza.
Verificar el programa de maquinado de acuerdo con la geometría de la pieza.
Conocimientos sobre:
Hojas de proceso.
Instrumentos de medición.
Sistemas de unidades.
Tipos de herramientas.
Manejo de PC.
Software de simulación (el que aplique).
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 14 de 22
Estrategia de Aprendizaje
Actitudes:
Orden.
Responsabilidad.
El docente diseñará una actividad para que el alumno demuestre la competencia: Realizar el programa del maquinado de piezas mecánicas por control numérico.
2. Fabricar piezas mecánicas en centro de maquinado de control numérico.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Operar el centro de maquinado de control numérico.
Identificar las partes principales del centro de maquinado.
Revisar el centro de maquinado en condiciones de operación.
Seleccionar la herramienta de sujeción de acuerdo con la geometría de la pieza.
Colocar en la bancada la herramienta de sujeción y el sólido de acuerdo con la geometría de la pieza.
Seleccionar los instrumentos de medición, las herramientas de corte de acuerdo al material y a las secuencias de maquinado.
Realizar la puesta en marcha del centro de maquinado de acuerdo con el manual de operación.
Montar la herramienta de corte de acuerdo con la secuencia de maquinado.
Insertar el programa en el controlador del centro de maquinado de acuerdo con las instrucciones del procedimiento.
Realizar los ajustes de compensaciones de posiciones de las herramientas (offset de altura).
Realizar los ajustes de compensaciones de geometría de las herramientas (offset de diámetro).
Establecer el sistema de coordenadas.
Realizar la corrida de prueba en vació.
Realizar la corrida del programa con material.
Verificar la pieza terminada de acuerdo con las especificaciones de diseño
Entregar pieza terminada limpia y libre de rebaba.
Aplicar los lineamientos de seguridad e higiene durante el maquinado.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 15 de 22
Estrategia de Aprendizaje
Conocimientos sobre:
Hojas de proceso.
Instrumentos de medición.
Sistemas de unidades.
Tipos de herramientas de corte.
Partes principales del centro de maquinado.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Fabricar piezas mecánicas en centro de maquinado de control numérico.
3. Fabricar piezas mecánicas en torno de control numérico.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para :
Operar el centro de maquinado de control numérico.
Identificar las partes principales del torno de control numérico.
Revisar el torno de control numérico en condiciones de operación.
Seleccionar la herramienta de sujeción de acuerdo con la geometría de la pieza.
Colocar en el cabezal la herramienta de sujeción y el sólido de acuerdo con la geometría de la pieza.
Seleccionar los instrumentos de medición, las herramientas de corte de acuerdo al material y a las secuencias de maquinado.
Realizar la puesta en marcha del torno de control numérico de acuerdo con el manual de operación.
Montar las herramientas de corte de acuerdo con las secuencias de maquinado.
Insertar el programa en el controlador del torno de control numérico de acuerdo con las instrucciones del procedimiento.
Realizar los ajustes de compensaciones de posiciones de las herramientas.
Realizar los ajustes de compensaciones de geometría de las herramientas (offset de diámetro).
Establecer el sistema de coordenadas.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 16 de 22
Estrategia de Aprendizaje
Realizar la corrida de prueba en vacío.
Realizar la corrida del programa con material.
Verificar la pieza terminada de acuerdo con las especificaciones de diseño
Entregar pieza terminada limpia y libre de rebaba.
Aplicar los lineamientos de seguridad e higiene durante el maquinado.
Conocimientos sobre:
Hojas de proceso.
Instrumentos de medición.
Sistemas de unidades.
Tipos de herramientas de corte.
Partes principales del torno de control numérico.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñara actividades para que el alumno demuestre la competencia: Fabricar piezas mecánicas en torno de control numérico.
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora en donde ensamble piezas maquinadas en torno y/o centro de maquinado de CN, por equipos y de forma individual donde el alumno demuestre todas las capacidades del submódulo.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 17 de 22
Estrategia de Aprendizaje
E) Recursos materiales de apoyo:
Caja portaherramientas.
Torno de control numérico.
Centro de maquinado de control numérico.
Kit de herramientas de corte y sujeción para el centro de maquinado de CN especifico.
Kit de herramientas de corte y sujeción para el torno de CN especifico.
Prensa especifica para el centro de maquinado específico.
Calibrador vernier 0-150mm.
Micrómetro de exteriores 0-25mm LEG 0.01mm.
Micrómetro de exteriores 25-50mm LEG 0.01mm.
Micrómetro de exteriores 50-75mm LEG 0.01mm.
Micrómetro de exteriores 75-100mm LEG 0.01mm.
Micrómetro de profundidades 0-75mm LEG 0.01mm.
Micrómetro de interiores de 5 -30 mm LEG 0.01 mm.
Micrómetro de interiores de 25 -50 mm LEG 0.01 mm.
Escuadra de espaldón de 75x100mm.
Regla escala metálica de 150mm.
Juego de paralelas (diversas medidas).
Base magnética.
Indicador de carátula tipo vástago.
Martillo de plástico.
Martillo de bronce.
Juego de limas.
Boquillas para fresadora (6, 10, 12, 16, 20 o las aplicables).
Llave de nariz.
Llave para prensa tipo dado.
Llave combinada dado y española 19mm (o la aplicable).
Martillo de acero.
Calibrador de espesores.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 18 de 22
Estrategia de Aprendizaje
Calibrador de alturas.
Mesa de calibración.
Lentes de seguridad.
Rayador.
Desarmadores plano y de cruz (diferentes medidas)
Calzas angulares para prensa.
Calza redonda de bronce 10 mm.
Brochas.
Brocha de ixtle.
Aceitera.
Juego de llaves allen.
Flexómetros.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 19 de 22
Evaluación de Competencias
Actividad: El alumno en forma individual realizará piezas mecánicas utilizando torno y centro de maquinado de control numérico.
Evidencias por desempeño 30%: 1. El programa del maquinado de piezas mecánicas por control numérico realizado. 2. Las piezas mecánicas en centro de maquinado de control numérico fabricadas. 3. Las piezas mecánicas en torno de control numérico fabricadas.
Evidencias por producto 60%: 1. El programa del maquinado de piezas mecánicas por control numérico realizado. 2. Las piezas mecánicas en centro de maquinado de control numérico fabricadas. 3. Las piezas mecánicas en torno de control numérico fabricadas.
Evidencias de conocimientos 0%:
Evidencias de actitudes 10%: Responsabilidad:
Evidencias por desempeño. 1. El programa de maquinado de piezas mecánicas por control numérico realizado. 2. Las piezas mecánicas en centro de maquinado de control numérico fabricadas. 3. Las piezas mecánicas en torno de control numérico fabricadas.
Limpieza: Evidencias por producto.
1. El programa de maquinado de piezas mecánicas por control numérico realizado. 2. Las piezas mecánicas en centro de maquinado de control numérico fabricadas. 3. Las piezas mecánicas en torno de control numérico fabricadas.
Orden: Evidencias por desempeño.
1. El programa de maquinado de piezas mecánicas por control numérico realizado. 2. Las piezas mecánicas en centro de maquinado de control numérico fabricadas. 3. Las piezas mecánicas en torno de control numérico fabricadas.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 20 de 22
Fuentes de Información
Juan González Núñez (1990). El control numérico en las máquinas herramienta, CECSA
José Castañeda Nava (1999). Control numérico, DGETI CNAD
José Castañeda Nava (1999). Torno de control numérico, DGETI CNAD
Denford, Dyna Myte, T.S. Harrison & Sons, Manuales De Programación De Las Empresas, EMCO, ( ALPHA )
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 21 de 22
Glosario
ABRASIVO: Sustancia de dureza que reducida a polvo sirve para afinar superficies de los cuerpos.
ACABADO: Mecanizado perfecto.
ADHERENCIA: Acción y efecto de adherir o pegarse una cosa con otra.
ANTISÉPTICO: Que evita la putrefacción.
BASTO: Sin pulimento.
BRIDAS: Elemento de agarre.
CHUCK: Parte del torno donde se fijo la pieza.
CORINDON: Abrasivo artificial.
CROQUIS: Dibujo hecho a pulso.
ENSAMBLE: Unir piezas encajadas una en otra.
LISAS: Pulidas.
MECANIZAR: Trabajo de arrancar viruta.
PINZAS AJUSTABLES: Parte de agarre de una máquina.
PLATO MAGNÉTICO: Elemento de sujeción de la rectificadora.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 22 de 22
Glosario
PRENSA: Elemento de sujeción.
PRECISIÓN: Exactitud al mecanizar.
PULIDAS: Terminado que se le hace a los metales.
ROZAMIENTO O FRICCIÓN: Pasar una cosa frotando la superficie de otra.
ASERRÍN: Conjunto de partículas que se desprenden de la madera u otro material que se cierra.
SUJECIÓN: Fijar una pieza.
TAMIZ: Cedazo muy fino.
TENAZ: Que opone mucha resistencia a romperse o deformarse.
VIRUTA: Hoja delgada sacada con la herramienta de corte al mecanizar una pieza metálica.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo III
Submódulo I
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 2 de 23
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 23
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 4 de 23
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 5 de 23
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 23
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 23
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 23
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 23
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 10 de 23
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 23
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 23
Programa de Estudio
Módulo III Manejar sistemas de control secuencial. Duración 272 Horas
Submódulo I Manejar sistemas mecatrónicos. Duración 8 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de manejar sistemas que emplean sensores y actuadores eléctricos, neumáticos, hidráulicos y mecanismos.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Aplicar los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos.
2. Aplicar los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos.
3. Aplicar los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos.
4. Aplicar mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos.
Estrategia de Aprendizaje A) Encuadre grupal: A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 13 de 23
Estrategia de Aprendizaje B) Relación con el entorno:
El docente realizará visitas con los alumnos a empresas de servicios o manufactura en donde se observe la aplicación de sistemas automatizados.
C) Desarrollo de las esferas de competencia:
1. Aplicar los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Operar elementos neumáticos.
Revisar el compresor en condiciones de operación.
Revisar unidad de mantenimiento en condiciones de operación.
Verificar el trabajo ejecutado en los componentes del sistema neumático.
Ajustar los valores de las variables de operación de acuerdo a los rangos establecidos.
Aplicar los lineamientos de seguridad e higiene.
Utilizar software de simulación para comprobación previa de funcionamiento de circuitos neumáticos.
Conocimientos sobre:
Fundamentos físicos.
Preparación del aire comprimido.
Actuadores neumáticos.
Válvulas neumáticas.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Aplicar los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 14 de 23
Estrategia de Aprendizaje
2. Aplicar los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Operar elementos hidráulicos.
Revisar la bomba en condiciones de operación.
Verificar el trabajo ejecutado en los componentes del sistema hidráulico.
Ajustar los valores de las variables de operación de acuerdo a los rangos establecidos.
Aplicar los lineamientos de seguridad e higiene.
Utilizar software de simulación para comprobación previa de funcionamiento de circuitos hidráulicos.
Conocimientos sobre:
Fundamentos físicos.
Actuadores hidráulicos.
Válvulas hidráulicas.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Aplicar los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 15 de 23
Estrategia de Aprendizaje
3. Aplicar los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Operar motores eléctricos.
Verificar las condiciones de operación de acuerdo a especificaciones.
Verificar condiciones de aislamiento.
Verificar sistemas de protección.
Verificar condiciones de arranque.
Verificar sistemas de paro de emergencia.
Realizar conexiones de acuerdo a especificaciones.
Operar sistemas de control de velocidad.
Conocimientos sobre:
Hojas de proceso.
Instrumentos de medición.
Tipos de motores.
Elementos de protección.
Controles de velocidad (el que aplique).
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Aplicar los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 16 de 23
Estrategia de Aprendizaje
4. Aplicar mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar acoplamiento de mecanismos.
Determinar componentes de un mecanismo.
Determinar grados de libertad del mecanismo.
Aplicar mecanismos para transferencia de movimiento.
Conocimientos sobre:
Componentes de un mecanismo.
Tipos de mecanismos.
Cadena cinemática.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Aplicar mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos.
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora sobre el ensamble de actuadores con mecanismos que permitan realizar secuencias de movimiento, por equipo y de forma individual donde el alumno demuestre todas las capacidades del submódulo.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 17 de 23
Estrategia de Aprendizaje E) Recursos materiales de apoyo:
Válvulas neumáticas diversas.
Tablero neumático.
Sistema de aire comprimido.
Electro válvulas.
Software de simulación para neumática, hidráulica, mecanismos.
Cilindros neumáticos de simple y doble efecto.
Cilindros hidráulicos de simple y doble efecto.
Válvulas hidráulicas.
Bomba hidráulica.
Motores de CC y CA.
Motores a pasos unipolares.
Servomotores.
Variadores de velocidad para motores de CA y CC.
Mecanismo biela-manivela.
Mecanismo cremallera-piñón.
Mecanismo tornillo sin fin.
Mecanismo de inversión.
Mecanismo de retorno rápido.
Mecanismo reductor de velocidad.
Mecanismo con engranes rectos y helicoidales.
Mecanismo de levas.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 18 de 23
Evaluación de Competencias Actividad: El alumno en forma individual y por equipos realizará actividades en donde se demuestre la operación y funcionamiento de los sistemas electromecánicos integrantes de un sistema mecatrónico.
Evidencias por desempeño 30%: 1. Los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos aplicados. 2. Los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos aplicados. 3. Los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos aplicados. 4. Los mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos aplicados.
Evidencias por producto 60%: 1. Los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos aplicados. 2. Los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos aplicados. 3. Los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos aplicados. 4. Los mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos aplicados.
Evidencias de conocimientos 0%:
Evidencias de actitudes 10%: Responsabilidad: Evidencias por desempeño:
1. Los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos aplicados. 2. Los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos aplicados. 3. Los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos aplicados. 4. Los mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos aplicados.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 19 de 23
Evaluación de Competencias
Limpieza: Evidencias por producto:
1. Los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos aplicados. 2. Los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos aplicados. 3. Los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos aplicados. 4. Los mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos aplicados.
Orden: Evidencias por producto:
1. Los principios de funcionamiento y conexión de elementos neumáticos en sistemas mecatrónicos aplicados. 2. Los principios de funcionamiento y conexión de elementos hidráulicos en sistemas mecatrónicos aplicados. 3. Los principios de funcionamiento y conexión de los motores de C.C. y C.A en sistemas mecatrónicos aplicados. 4. Los mecanismos de diversos tipos y características en la implementación de sistemas mecatrónicos aplicados.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 20 de 23
Fuentes de Información
Harry Mileaf (1983). Electricidad, EDITORIAL LIMUSA.
Festo Didactic (1992). Hidráulica Manual De Estudio
Festo Didactic (1992). Neumática Manual De Estudio
Overseas Vocational Training Association (1997). Mecatrónica I, II y III manual de instrucción, ED. SEP DGETI.
Fiedler G. (1988). Electroneumática-prácticas avanzadas, Festo Didactic.
Mandano/Acevedo/Pérez (1992). Controladores lógicos y autómatas programables, EDIT. MARCOMBO.
Michel G. (1990). Autómatas programables industriales-arquitectura y aplicaciones, EDIT. MARCOMBO
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 21 de 23
Glosario
ACTUADORES: Transductor, que transforma señales eléctricas en movimientos mecánicos.
ALGORITMO: Conjunto definido de reglas o procesos para la solución de problemas en un número finito de pasos.
ANALÓGICO: Representación de una variable o información mediante valores que varíen de forma continua. Se opone a numérico o digital.
AUTOMATIZACIÓN: Se le denomina así a cualquier tarea realizada por máquinas en lugar de personas. Es la sustitución de procedimientos manuales por sistemas de cómputo.
CIRCUITO: Es un ciclo, un camino sin interrupciones que permite por ejemplo, que la corriente salga por un lado de la pila y regrese por el otro. También es necesario un circuito para obtener electricidad del tomacorriente.
CONTROLADOR: Es la parte del software que controla un periférico particular.
CONTROL NUMÉRICO: Los datos están representados en forma de códigos numéricos almacenados en un medio adecuado. Se llaman también sistemas de punto a punto, o de camino continuo.
COORDENADAS: Sistema de ejes para el posicionamiento de un punto en el plano o en el espacio. Pueden ser: a) Angulares. Si la referencia de un punto se hace mediante la definición de ángulos a partir de los ejes (origen de los ángulos). b) Polares. Se establece un punto mediante la indicación de un ángulo y un valor escalar (numérico). c) Rectangulares. Cuando los puntos están definidos por varios números (dos o tres).
DISPOSITIVO: Mecanismo de un aparato o equipo que, una vez accionado, desarrolla de forma automática la función que tiene asignada.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 22 de 23
Glosario
EJE: Cada una de las líneas según las cuales se puede mover el robot o una parte de él (algún elemento de su estructura). Pueden ser ejes o líneas de desplazamiento longitudinal sobre sí mismo (articulación prismática) o ejes de giro (rotación). Cada eje define un grado de libertad del robot.
ELEMENTO: Cada uno de los componentes de la estructura de un manipulador. Pueden ser elemento maestro, esclavo, de unión, Terminal, etc.
GRADO DE LIBERTAD: Cada uno de los movimientos básicos que definen la movilidad de un determinado robot. Puede indicar un movimiento longitudinal o de rotación. (Ver Eje.)
HERRAMIENTA: Es un instrumento para prolongar o ampliar alguna capacidad humana.
HIDRÁULICO: Es un manipulador cuya energía de movimiento viene proporcionada por un fluido que presiona émbolos. Se consigue una gran potencia en la operación del robot, aunque se pierda precisión.
INTERFACE: Circuito o conector que hace posible el "entendimiento" entre dos elementos de hardware, es decir, permite su comunicación.
INSTRUMENTO: Es un elemento que permite hacer algún tipo de medición, comprobar el buen funcionamiento de un artefacto, o a veces cuando está incorporado al propio artefacto sirve para hacer un uso correcto del mismo.
INTERRUPTOR: Su función es cortar o no, el paso de la corriente eléctrica: por medio de distintos tipos de mecanismos, juntan y separan cables. La llave de la luz y el pulsador de un timbre son ejemplos de interruptores.
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
NEUMÁTICO: Es un manipulador cuya energía de movimiento viene proporcionada por un sistema de aire comprimido (conductos que lo contienen, émbolos de empuje, sistema compresor, etc.).
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 23 de 23
Glosario
PASO A PASO, MOTOR: Motor eléctrico que gira un numero exacto de grados al recibir una adecuada secuencia de comandos de control. Son motores sumamente precisos.
SENSOR: Transductor que capta magnitudes y las transforma en señales eléctricas.
SISTEMA: Conjunto organizado de elementos diferenciados cuya interrelación e interacción supone una función global.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo III
Submódulo II
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 2 de 22
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 22
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 4 de 22
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 5 de 22
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 22
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 22
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 22
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 9 de 22
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 10 de 22
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 22
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 22
Programa de Estudio
Módulo III Manejar sistemas de control secuencial. Duración 272 Horas
Submódulo II Automatizar procesos por medio de PLC. Duración 9 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de manejar sistemas que emplean sensores y actuadores eléctricos, electro neumático, electro hidráulico y mecanismos por medio de controladores lógicos programables.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Aplicar sensores en la automatización de un proceso.
2. Aplicar relevadores electromagnéticos para la automatización de un proceso.
3. Aplicar PLC´s como medio de control, para la automatización de un proceso.
Estrategia de Aprendizaje
A) Encuadre grupal: A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 13 de 22
Estrategia de Aprendizaje
B) Relación con el entorno:
El docente realiza visitas con los alumnos a empresas de servicios o manufactura en donde se observe la aplicación de
sistemas automatizados.
C) Desarrollo de las esferas de competencia:
1. Aplicar sensores en la automatización de un proceso.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Manipular sensores.
Utilizar equipo de seguridad personal de acuerdo con el reglamento de Seguridad al equipo de protección personal.
Identificar que el sensor en los diagramas corresponde con su nomenclatura y simbología.
Identificar físicamente el sensor de acuerdo a la orden de trabajo emitida.
Seleccionar la herramienta y equipo de diagnostico correspondiente al tipo de sensor.
Calibrar el sensor de acuerdo al procedimiento establecido.
Desmontar el sensor de acuerdo a procedimiento establecido y al reglamento de seguridad e higiene.
Desensamblar el sensor de acuerdo al tipo y procedimiento establecido.
Diagnosticar el sensor de acuerdo a la inspección y sus especificaciones técnicas.
Reemplazar el sensor de acuerdo a las especificaciones técnicas del fabricante.
Ensamblar el sensor de acuerdo a su procedimiento de ensamble.
Ajustar el sensor de acuerdo a procedimiento establecido.
Conocimientos sobre:
Tipos de sensores.
Variables físicas.
Conversión de unidades.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 14 de 22
Estrategia de Aprendizaje Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Aplicar sensores en la automatización de un proceso.
2. Aplicar relevadores electromagnéticos para la automatización de un proceso.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Manipular relevadores y contactores en circuitos de control.
Realizar diagramas de escalera.
Interpretar diagramas de escalera.
Realizar diagramas de tiempo.
Utilizar equipo de seguridad personal de acuerdo con el reglamento de Seguridad e higiene relativo al equipo de protección personal.
Identificar que el relevador, interruptor o contactor en los diagramas corresponde con su nomenclatura y simbología.
Identificar físicamente el relevador, interruptor o contactor de acuerdo a la orden de trabajo emitida.
Seleccionar la herramienta y equipo de diagnostico correspondiente al tipo de relevador, interruptor o contactor.
Desmontar el relevador, interruptor o contactor de acuerdo a procedimiento establecido y al reglamento de seguridad e higiene.
Diagnosticar el relevador, interruptor o contactor de acuerdo a la inspección y sus especificaciones técnicas.
Reemplazar el relevador, interruptor o contactor de acuerdo a las especificaciones técnicas del fabricante.
Ajustar el relevador, interruptor o contactor de acuerdo a procedimiento establecido.
Aplicar circuitos básicos de control.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 15 de 22
Estrategia de Aprendizaje Conocimientos sobre:
Sistema americano.
Sistema europeo.
Elementos de control de un circuito secuencial.
Tipos de relevador.
Tipos de interruptor.
Contactores.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Aplicar relevadores electromagnéticos para la automatización de un proceso.
3. Aplicar PLC s como medio de control, para la automatización de un proceso.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Manipular Controladores Lógicos Programables.
Verificar las pruebas operativas de acuerdo con lo especificado en la orden de trabajo.
Verificar las condiciones del controlador de acuerdo con su información técnica.
Realizar la conexión del controlador con los elementos del sistema a controlar de acuerdo a especificaciones.
Realizar el programa de control de acuerdo a especificaciones.
Realizar simulación de operación.
Transferir el programa al controlador.
Realizar corrida de prueba y ajuste de valores.
Realizar la puesta en marcha del sistema.
Utilizar equipo de seguridad personal de acuerdo con el reglamento de Seguridad e higiene relativo al equipo de protección personal.
Seleccionar la herramienta y equipo de diagnostico correspondiente.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 16 de 22
Estrategia de Aprendizaje Conocimientos sobre:
Tipos de PLC.
Lenguajes de PLC.
Estructura del PLC.
Manejo de PC.
Software de simulación.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Aplicar PLC´s como medio de control, para la automatización de un proceso
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora sobre el ensamble de actuadores, sensores, mecanismos y controlador lógico programable que permita realizar la automatización de un proceso, por equipo y de forma individual donde el alumno demuestre todas las capacidades del submódulo.
E) Recursos materiales de apoyo:
Tablero neumático
Sistema de aire comprimido
Electro válvulas
Software de simulación para PLC (el aplicable)
Actuadores neumáticos
Actuadores hidráulicos
Motores
Variadores de velocidad
Mecanismos
Controlador Lógico Programable
Estaciones de botones
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 17 de 22
Estrategia de Aprendizaje
Fuentes de alimentación (lo aplicable)
Puntas de conexión apilables
Desarmador (varios tipos y tamaños)
Relevadores
Timers
Contadores
Fusibles
Interruptores (diferentes modos de activación)
Contactores
Elementos de sobrecarga
Arrancadores
Computadora Personal
Pinzas de corte, punta, tipo electricista
Cable para conexiones
Lentes de seguridad
Zapatos dieléctricos
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 18 de 22
Evaluación de Competencias Actividad: El alumno en forma individual y por equipo realizará la automatización de un proceso (ensamble y/o productivo).
Evidencias por desempeño 30%: 1. Los sensores en la automatización de un proceso aplicados. 2. Los relevadores electromagnéticos para la automatización de un proceso aplicados. 3. Los PLC´s como medio de control, para la automatización de un proceso aplicados
Evidencias por producto 60%: 1. Los sensores en la automatización de un proceso aplicados. 2. Los relevadores electromagnéticos para la automatización de un proceso aplicados. 3. Los PLC´s como medio de control, para la automatización de un proceso aplicado.
Evidencias de conocimiento 0%:
Evidencias de actitudes 10%: Limpieza:
Evidencias por desempeño: 1. Los sensores en la automatización de un proceso aplicados. 2. Los relevadores electromagnéticos para la automatización de un proceso aplicados. 3. Los PLC´s como medio de control, para la automatización de un proceso aplicado.
Orden: Evidencias por desempeño:
1. Los sensores en la automatización de un proceso aplicados. 2. Los relevadores electromagnéticos para la automatización de un proceso aplicados. 3. Los PLC´s como medio de control, para la automatización de un proceso aplicado.
Responsabilidad: Evidencias por Producto:
1. Los sensores en la automatización de un proceso aplicados. 2. Los relevadores electromagnéticos para la automatización de un proceso aplicados. 3. Los PLC como medio de control, para la automatización de un proceso aplicado.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 19 de 22
Fuentes de Información
Overseas Vocational Training Association (1997). Mecatrónica I, II y III manual de instrucción, ED. SEP DGETI.
Fiedler G. (1988). Electroneumática-prácticas avanzadas, Festo Didactic.
Mandano/Acevedo/Pérez (1992). Controladores lógicos y autómatas programables, EDIT. MARCOMBO.
Michel G. (1990). Autómatas programables industriales-arquitectura y aplicaciones, EDIT. MARCOMBO
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 20 de 22
Glosario
ACTUADORES: Transductor, que transforma señales eléctricas en movimientos mecánicos.
ALGORITMO: Conjunto definido de reglas o procesos para la solución de problemas en un número finito de pasos.
ANALÓGICO: Representación de una variable o información mediante valores que varíen de forma continua. Se opone a numérico o digital.
AUTOMATIZACIÓN: Se le denomina así a cualquier tarea realizada por máquinas en lugar de personas. Es la sustitución de procedimientos manuales por sistemas de cómputo.
CIRCUITO: Es un ciclo, un camino sin interrupciones que permite por ejemplo, que la corriente salga por un lado de la pila y regrese por el otro. También es necesario un circuito para obtener electricidad del tomacorriente.
CONTROLADOR: Es la parte del software que controla un periférico particular.
CONTROL NUMÉRICO: Los datos están representados en forma de códigos numéricos almacenados en un medio adecuado. Se llaman también sistemas de punto a punto, o de camino continuo.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 21 de 22
Glosario
COORDENADAS: Sistema de ejes para el posicionamiento de un punto en el plano o en el espacio. Pueden ser: a) Angulares. Si la referencia de un punto se hace mediante la definición de ángulos a partir de los ejes (origen de los ángulos). b) Polares. Se establece un punto mediante la indicación de un ángulo y un valor escalar (numérico). c) Rectangulares. Cuando los puntos están definidos por varios números (dos o tres).
DISPOSITIVO: Mecanismo de un aparato o equipo que, una vez accionado, desarrolla de forma automática la función que tiene asignada.
EJE: Cada una de las líneas según las cuales se puede mover el robot o una parte de él (algún elemento de su estructura). Pueden ser ejes o líneas de desplazamiento longitudinal sobre sí mismo (articulación prismática) o ejes de giro (rotación). Cada eje define un grado de libertad del robot.
ELEMENTO: Cada uno de los componentes de la estructura de un manipulador. Pueden ser elemento maestro, esclavo, de unión, Terminal, etc.
GRADO DE LIBERTAD: Cada uno de los movimientos básicos que definen la movilidad de un determinado robot. Puede indicar un movimiento longitudinal o de rotación. (Ver Eje.)
HERRAMIENTA: Es un instrumento para prolongar o ampliar alguna capacidad humana.
HIDRÁULICO: Es un manipulador cuya energía de movimiento viene proporcionada por un fluido que presiona émbolos. Se consigue una gran potencia en la operación del robot, aunque se pierda precisión.
INTERFACE: Circuito o conector que hace posible el "entendimiento" entre dos elementos de hardware, es decir, permite su comunicación.
INSTRUMENTO: Es un elemento que permite hacer algún tipo de medición, comprobar el buen funcionamiento de un artefacto, o a veces cuando está incorporado al propio artefacto sirve para hacer un uso correcto del mismo.
INTERRUPTOR: Su función es cortar o no, el paso de la corriente eléctrica: por medio de distintos tipos de mecanismos, juntan y separan cables. La llave de la luz y el pulsador de un timbre son ejemplos de interruptores.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 22 de 22
Glosario
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
NEUMÁTICO: Es un manipulador cuya energía de movimiento viene proporcionada por un sistema de aire comprimido (conductos que lo contienen, émbolos de empuje, sistema compresor, etc.).
PASO A PASO, MOTOR: Motor eléctrico que gira un numero exacto de grados al recibir una adecuada secuencia de comandos de control. Son motores sumamente precisos.
PLC: Es un aparato electrónico operado digitalmente que usa una memoria programable para el almacenamiento interno de instrucciones las cuales implementan funciones especificas tales como lógicas, secuénciales, temporización, conteo y aritméticas, para controlar a través de módulos de entrada /salida digitales y analógicas, varios tipos de maquinas o procesos.
SENSOR: Transductor que capta magnitudes y las transforma en señales eléctricas.
SISTEMA: Conjunto organizado de elementos diferenciados cuya interrelación e interacción supone una función global.
SISTEMA DE CONTROL: Un grupo de elementos o componentes que operan a un dispositivo, a un mecanismo o a nuestro propio cuerpo. Es un sistema de control.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo IV
Submódulo I
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 2 de 19
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 19
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 4 de 19
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 5 de 19
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 19
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 19
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 19
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 19
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
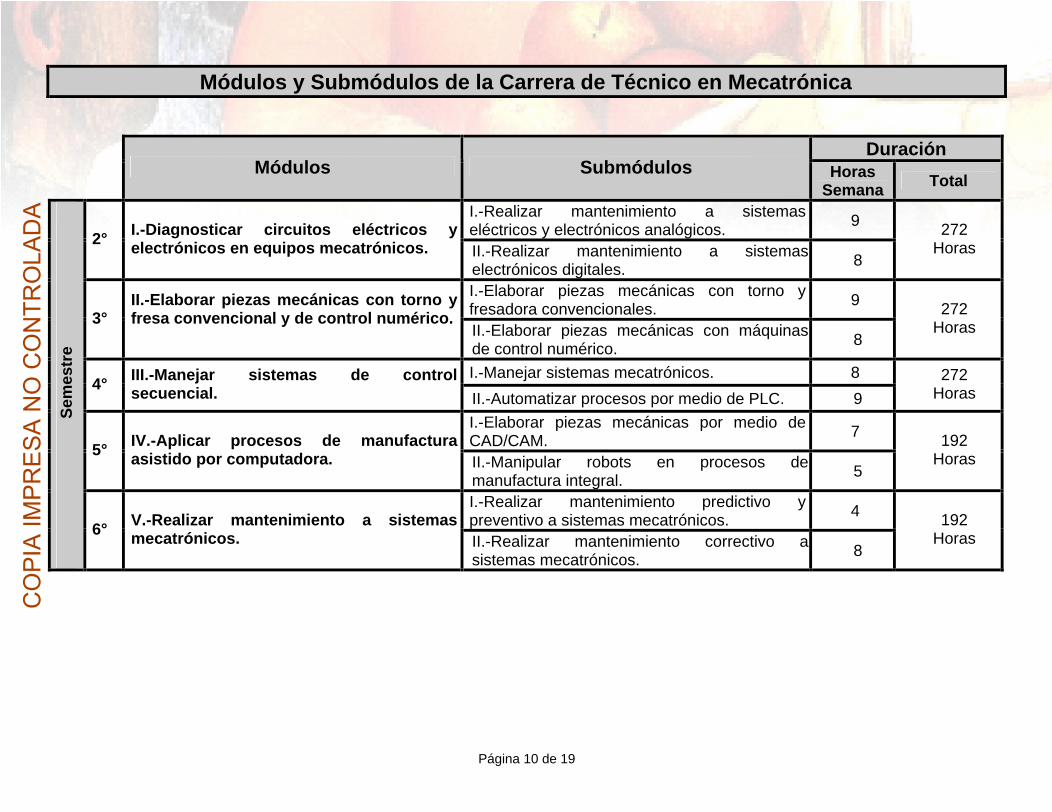
Página 10 de 19
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 19
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 19
Programa de Estudio
Módulo IV Aplicar procesos de manufactura asistido por
computadora. Duración 192 Horas
Submódulo I Elaborar piezas mecánicas por medio de CAD/CAM. Duración 7 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de elaborar piezas mecánicas utilizando herramientas de CAD y CAM para el diseño y planeación del proceso de manufactura.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Manipular software de CAD para el diseño y planeación de los planos de fabricación de piezas mecánicas
2. Manipular software de CAM para la creación de los programas de control numérico para la manufactura de piezas mecánicas.
Estrategia de Aprendizaje
A) Encuadre grupal: A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 13 de 19
Estrategia de Aprendizaje B) Relación con el entorno:
El docente realizará visitas con los alumnos a empresas de servicios o manufactura en donde se observe la aplicación del diseño y manufactura asistida por computadora.
C) Desarrollo de las esferas de competencia:
1. Manipular software de CAD para el diseño y planeación de los planos de fabricación de piezas mecánicas.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Manipular entidades simples (líneas, círculos, cilindros, esferas, curvas, bezier, spline) y complejas.
Editar entidades como: intersección, recortado, proyección, traslaciones, escalados, rotaciones, copias, mirror, offset, copy, mov, las aplicables.
Manipular entidades como: intersección, recortado, proyección, traslaciones, escalados, rotaciones, copias, mirror, offset, copy, mov, las aplicables.
Establecer Sistemas de Coordenadas de usuario, cartesianas, cilíndricas, esféricas.
Determinar tipos de objetos2D,2½D,3D.
Desarrollar modelos geométricos alámbricos.
Crear un nuevo modelo vacío.
Elegir una distribución de ventanas.
Asignar vistas a las ventanas.
Seleccionar los planos de construcción y trabajo.
Desarrollar modelos geométricos de superficies.
Crear un nuevo modelo vacío.
Elegir una distribución de ventanas.
Asignar vistas a las ventanas.
Seleccionar los planos de construcción y trabajo.
Superficies planas.
Superficies regladas.
De revolución.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 14 de 19
Estrategia de Aprendizaje
De extrusión.
Bezier.
Spline.
Desarrollar modelos geométricos de sólidos.
Crear un nuevo modelo vacío.
Elegir una distribución de ventanas.
Asignar vistas a las ventanas.
Seleccionar los planos de construcción y trabajo.
Bloques.
Cilindros.
Conos.
Cuñas.
Toroides.
Determinar vistas, cortes y detalles necesarios para manufactura de pieza, a partir de un sólido.
Realizar planos de manufactura: según normas estándar, acotación, tolerancias, escala, unidades, notas.
Conocimientos sobre:
NOM. De dibujo Técnico.
Sistema de unidades.
Manejo de archivos electrónicos.
Actitudes:
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Manipular software de CAD para el diseño y planeación de los planos de fabricación de piezas mecánicas.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 15 de 19
Estrategia de Aprendizaje
2. Manipular software de CAM para la creación de los programas de control numérico para la manufactura de piezas
mecánicas.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas en:
Aplicar el protocolo de intercambio de datos adecuado entre el software y la máquina de control numérico (el que aplique).
IGES.
ANSI.
SET.
VDA.
XBF.
PDDI.
ESPRIT.
PDES.
STEP STEP.
Determinar la estructura y formato del archivo de control numérico aplicable.
ASCII.
ASCII Fijo.
ASCII Comprimido.
Binario.
Realizar el Preprocesado del archivo.
Realizar el Postprocesado del archivo.
Clasificar partes aplicadas al diseño de piezas.
Planificar procesos:
Identificar la secuencia de procesos.
Planificar y/o ordenar compra de material.
Planificar producción e inspección.
Generar el Programa de Control Numérico.
Fabricar piezas según tolerancias y requerimientos (material, acabado).
Controlar la calidad, utilizando técnicas de control estadístico.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 16 de 19
Estrategia de Aprendizaje Conocimientos sobre:
Programación de control numérico.
Resistencia de materiales.
Herramientas de corte.
Actitudes:
Limpieza
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Manipular software de CAM para la creación de los programas de control numérico para la manufactura de piezas mecánicas.
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora sobre el ensamble de piezas diseñadas y maquinadas, de forma individual y por equipos donde el alumno demuestre todas las capacidades del submódulo.
E) Recursos materiales de apoyo:
50 PC´s Pentium IV, 3 GHz. HDD 80 GB, grabador de CD, Pantalla de 17
Software CAD. Con licencia.
Manuales de dibujo técnico.
Piezas mecánicas para modelo.
50 Vernier.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 17 de 19
Evaluación de Competencias Actividad: El alumno en forma individual realizará el diseño, planeación y manufactura de piezas mecánicas utilizando CAD / CAM.
Evidencias por desempeño 30%:
1. El software de CAD para el diseño y planeación de los planos de fabricación de piezas mecánicas manipulado. 2. El software de CAM para la creación de los programas de control numérico para la manufactura de piezas mecánicas
manipulado.
Evidencias por producto 60%: 1. El software de CAD para el diseño y planeación de los planos de fabricación de piezas mecánicas manipulado. 2. El software de CAM para la creación de los programas de control numérico para la manufactura de piezas mecánicas
manipulado.
Evidencias de conocimiento 0%:
Evidencias de actitudes 10%: Limpieza: Evidencias por desempeño
1. El software de CAD para el diseño y planeación de los planos de fabricación de piezas mecánicas manipulado. 2. El software de CAM para la creación de los programas de control numérico para la manufactura de piezas
mecánicas manipulado.
Responsabilidad: Evidencias por producto
1. El software de CAD para el diseño y planeación de los planos de fabricación de piezas mecánicas manipulado. 2. El software de CAM para la creación de los programas de control numérico para la manufactura de piezas
mecánicas manipulado. CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 18 de 19
Fuentes de Información
Parametric Technology Corporation. Creating Milling Sequences with Pro/Engineer Wildfire - CAD/CAM/CAE-
Kunwoo Lee, (1999). Principles of CAD/CAM/CAE Editorial Addison-Wesley
"Ibrahim Zeid, (1991). CAD/CAM Teory and Practice. Ed. MacGraw-Hill Inc.
M.P. Groover and E.W. Zimmers Jr (1984). CAD/CAM: Computer-Aided Design and Manufacturing. Ed. Prentice Hall International
Inc.
Julio Blanco Fernández; Félix Sanz Adán; Julio Blanco Fernández; Félix Sanz Adán (Paraninfo). CAD-CAM. GRÁFICOS, ANIMACIÓN Y SIMULACIÓN POR ORDENADOR
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 19 de 19
Glosario
CAD: Diseño asistido por computadora.
CAM: Manufactura asistida por computadora.
CONTROLADOR: Es la parte del software que controla un periférico particular.
CONTROL NUMÉRICO: Los datos están representados en forma de códigos numéricos almacenados en un medio adecuado. Se llaman también sistemas de punto a punto, o de camino continuo.
COORDENADAS: Sistema de ejes para el posicionamiento de un punto en el plano o en el espacio. Pueden ser: a) Angulares. Si la referencia de un punto se hace mediante la definición de ángulos a partir de los ejes (origen de los ángulos). b) Polares. Se establece un punto mediante la indicación de un ángulo y un valor escalar (numérico). c) Rectangulares. Cuando los puntos están definidos por varios números (dos o tres).
DISPOSITIVO: Mecanismo de un aparato o equipo que, una vez accionado, desarrolla de forma automática la función que tiene asignada.
EJE: Cada una de las líneas según las cuales se puede mover el robot o una parte de él (algún elemento de su estructura). Pueden ser ejes o líneas de desplazamiento longitudinal sobre sí mismo (articulación prismática) o ejes de giro (rotación). Cada eje define un grado de libertad del robot.
ELEMENTO: Cada uno de los componentes de la estructura de un manipulador. Pueden ser elemento maestro, esclavo, de unión, Terminal, etc.
INTERFACE: Circuito o conector que hace posible el "entendimiento" entre dos elementos de hardware, es decir, permite su comunicación.
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
SISTEMA: Conjunto organizado de elementos diferenciados cuya interrelación e interacción supone una función global.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo IV
Submódulo II
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 2 de 18
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 18
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 4 de 18
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 5 de 18
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 18
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 18
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 18
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 18
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 10 de 18
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 18
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
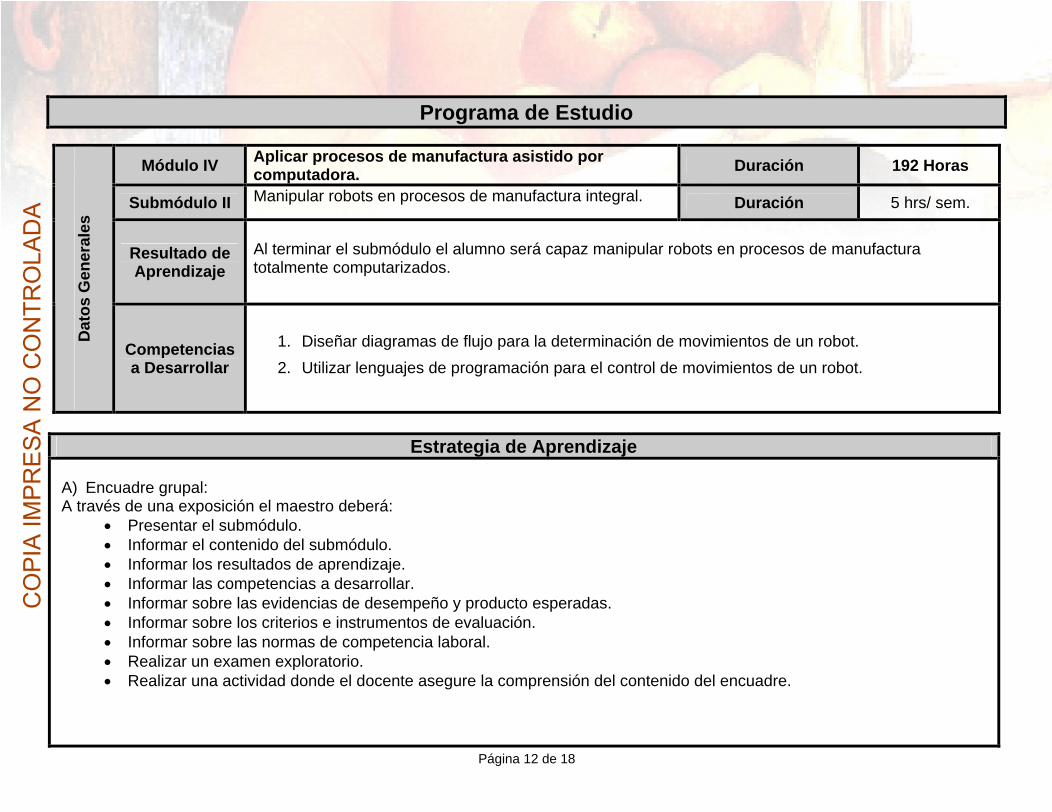
Página 12 de 18
Programa de Estudio
Módulo IV Aplicar procesos de manufactura asistido por
computadora. Duración 192 Horas
Submódulo II Manipular robots en procesos de manufactura integral. Duración 5 hrs/ sem.
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz manipular robots en procesos de manufactura totalmente computarizados.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Diseñar diagramas de flujo para la determinación de movimientos de un robot.
2. Utilizar lenguajes de programación para el control de movimientos de un robot.
Estrategia de Aprendizaje
A) Encuadre grupal: A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 13 de 18
Estrategia de Aprendizaje B) Relación con el entorno:
El docente realiza visitas con los alumnos a empresas de servicios o manufactura en donde se observe la aplicación de
robots dentro del proceso de manufactura.
C) Desarrollo de las esferas de competencia:
1. Diseñar diagramas de flujo para la determinación de movimientos de un robot.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Establecer variables y constantes.
Establecer condiciones iniciales.
Establecer límites de seguridad de acuerdo a especificaciones técnicas del robot.
Establecer secuencias del proceso a controlar.
Considerar grados de libertad.
Establecer velocidades de desplazamiento.
Identificar la ruta más idónea para la realización del movimiento considerando obstáculos permanentes y temporales.
Localizar los puntos de manufactura, como son: almacén, módulos de inspección y sensado, transporte.
Utilizar simbología de los diagramas de flujo.
Verificar que el diagrama planteado cumpla con todas las condiciones del proceso.
Conocimientos sobre:
Sensores y actuadores.
Simbología de diagramas de flujo.
Actitudes:
Orden
Responsabilidad
El docente diseñara actividades para que el alumno demuestre la competencia: Diseñar diagramas de flujo para la implementación de un programa de robot.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 14 de 18
Estrategia de Aprendizaje 2. Utilizar lenguajes de programación para el control de movimientos de un robot.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar movimientos del robot de forma manual.
Establecer de coordenadas de forma manual.
Realizar el programa de control en el lenguaje que aplique.
Capturar el programa.
Editar el programa.
Modificar el programa.
Compilar el programa de control (si aplica).
Simular el programa de control generado.
Depurar el programa de control.
Transferir programa (si aplica).
Verificar el programa de control dentro de un proceso de manufactura.
Realizar ajustes finales de operación.
Respaldar programas desde el robot hacia medios magnéticos, electrónicos e impresos o el que aplique.
Ejecutar el programa de control.
Controlar el robot por señales o medios externos (si aplica).
Conocimientos sobre:
Sistemas de coordenadas.
Interpolación de movimientos.
Sistemas operativos.
Actitudes:
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Utilizar lenguajes de programación para el control de movimientos de un robot.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 15 de 18
Estrategia de Aprendizaje D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora sobre la transportación de piezas por medio de un robot de forma individual donde el alumno demuestre todas las capacidades del submódulo.
E) Recursos materiales de apoyo:
3 Robots (6 grados de libertad).
Software de simulación de movimientos de robot.
Piezas para transportación.
Banda transportadora.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 16 de 18
Evaluación de Competencias Actividad: El alumno en forma individual realizará el diseño de programas de control de movimientos para robots.
Evidencias por desempeño 30%: 1. Los diagramas de flujo para la determinación de movimientos de un robot diseñados. 2. Los lenguajes de programación para el control de movimientos de un robot utilizados.
Evidencias por producto 60%: 1. Los diagramas de flujo para la determinación de movimientos de un robot diseñados. 2. Los lenguajes de programación para el control de movimientos de un robot utilizados.
Evidencias de conocimiento 0%:
Evidencias de actitudes 10%:
Orden: Evidencias por producto
1. Los diagramas de flujo para la determinación de movimientos de un robot diseñados. 2. Los lenguajes de programación para el control de movimientos de un robot utilizados.
Responsabilidad: Evidencias por desempeño.
1. Los diagramas de flujo para la determinación de movimientos de un robot diseñados. 2. Los lenguajes de programación para el control de movimientos de un robot utilizados.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 17 de 18
Fuentes de información
García Criollo Roberto, (2000). Estudio del trabajo, Ingeniería de métodos., México MC Graw Hill
Bernat Romani, (1999). Jugar con las máquinas, Ed. Ters Torres/Edunsa
Clive Gifford, (1998). Robots Descubre cómo funcionan estas máquinas SM Saber
Murphy, Robin (2001). Introduction to AI Robotics. MIT Press.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 18 de 18
Glosario
CAD: Diseño asistido por computadora.
CAM: Manufactura asistida por computadora.
CONTROLADOR: Es la parte del software que controla un periférico particular.
CONTROL NUMÉRICO: Los datos están representados en forma de códigos numéricos almacenados en un medio adecuado. Se llaman también sistemas de punto a punto, o de camino continuo.
COORDENADAS: Sistema de ejes para el posicionamiento de un punto en el plano o en el espacio. Pueden ser: a) Angulares. Si la referencia de un punto se hace mediante la definición de ángulos a partir de los ejes (origen de los ángulos). b) Polares. Se establece un punto mediante la indicación de un ángulo y un valor escalar (numérico). c) Rectangulares. Cuando los puntos están definidos por varios números (dos o tres).
DISPOSITIVO: Mecanismo de un aparato o equipo que, una vez accionado, desarrolla de forma automática la función que tiene asignada.
EJE: Cada una de las líneas según las cuales se puede mover el robot o una parte de él (algún elemento de su estructura). Pueden ser ejes o líneas de desplazamiento longitudinal sobre sí mismo (articulación prismática) o ejes de giro (rotación). Cada eje define un grado de libertad del robot.
ELEMENTO: Cada uno de los componentes de la estructura de un manipulador. Pueden ser elemento maestro, esclavo, de unión, Terminal, etc.
INTERFACE: Circuito o conector que hace posible el "entendimiento" entre dos elementos de hardware, es decir, permite su comunicación.
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
SISTEMA: Conjunto organizado de elementos diferenciados cuya interrelación e interacción supone una función global.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo V
Submódulo I
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 2 de 22
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 22
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 4 de 22
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 5 de 22
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 22
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 22
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 22
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 9 de 22
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 10 de 22
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 11 de 22
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 22
Programa de Estudio
Módulo V Realizar mantenimiento a sistemas mecatrónicos. Duración 192 Horas
Submódulo I Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos. Duración 4 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz de realizar la planeación y administración del mantenimiento predictivo y preventivo de los diferentes sistemas que conforman un sistema mecatrónico.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Elaborar el plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa.
2. Elaborar el plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa.
Estrategia de Aprendizaje
A) Encuadre grupal: A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 13 de 22
Estrategia de Aprendizaje B) Relación con el entorno:
El docente realiza visitas con los alumnos a empresas de servicios o manufactura en donde se observe la planeación del mantenimiento a sistemas mecatrónicos.
C) Desarrollo de las esferas de competencia:
1. Elaborar el plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Planear el mantenimiento de acuerdo con la información técnica y la solicitud de intervención.
Programar el mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa como son:
Sistema Eléctrico.
Interruptores de media tensión.
Interruptores de potencia.
Interruptores de baja tensión.
Contactores y relevadores, (de tiempo y conteo).
Generadores y Motores eléctricos, servomotores.
Interruptores de Posición, Presión, Nivel, Flujo.
Arrancadores.
Interruptores de sobre carga.
Sistema Mecánico.
Bandas, catarinas.
Rodamientos.
Retenes y sellos.
Poleas, cadenas.
Juntas.
Engranes, flechas.
Mecanismos.
Acoplamientos, embragues.
Lubricantes.
Refrigerantes.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 14 de 22
Estrategia de Aprendizaje
Sistema Neumático.
o Válvulas. o Cilindros. o Compresores. o Tanque de almacenamiento. o Unidades de mantenimiento. o Motores. o Líneas de distribución. o Conexiones.
Sistema Hidráulico. o Válvulas. o Cilindros. o Bombas. o Tanque de almacenamiento. o Intercambiadores de calor. o Motores. o Líneas de distribución. o Conexiones.
Controlar la información técnica de mantenimiento de acuerdo a las políticas y los procedimientos establecidos.
Cumplir con los requerimientos de seguridad e higiene con base en la normatividad vigente.
Responder a las emergencias de acuerdo a los procedimientos establecidos por la empresa.
Llenar bitácoras de mantenimiento.
Conocimientos sobre:
Mediciones de Flujos, Presiones, Temperaturas, Niveles, Ruidos, Emisiones, Fugas, lo aplicable.
Nomenclatura y simbología de diagramas eléctricos, neumáticos e hidráulicos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 15 de 22
Estrategia de Aprendizaje Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Elaborar el plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa.
2. Elaborar el plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Planear el mantenimiento de acuerdo con la información técnica y la solicitud de intervención.
Programar el mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa como son:
Sistemas electrónicos analógicos:
Sensores y transductores.
Fuentes de alimentación.
Elementos de protección y seguridad.
Acondicionadores de señal.
Sistemas electrónicos digitales:
Elementos de temporización.
Elementos de conteo.
Elementos de almacenamiento.
Codificadores y decodificadores.
Sistemas electrónicos microprocesados:
Controladores Lógicos Programables.
Controlador aplicable.
Variadores de velocidad.
Manejadores de servomotores.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 16 de 22
Estrategia de Aprendizaje
Conocimientos sobre:
Mediciones de Corriente, Voltaje, Frecuencia, Resistencia, dB., Potencia, temperatura, velocidad.
Nomenclatura y simbología de diagramas eléctricos y electrónicos.
Actitudes:
Orden
El docente diseñara actividades para que el alumno demuestre la competencia: Elaborar el plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa.
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora sobre el mantenimiento de un sistema en equipos y de forma individual donde el alumno demuestre todas las capacidades del submódulo.
E) Recursos materiales de apoyo:
Sistemas mecatrónicos para pruebas y practicas.
Bitácoras de mantenimiento.
Manuales técnicos.
Herramientas manuales.
Equipo de seguridad.
Sistemas eléctricos para prácticas y pruebas.
Sistemas neumático e hidráulicos para prueba
Sistemas microprocesados para prueba.
Sistemas electromecánicos para prácticas y pruebas.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 17 de 22
Evaluación de Competencias Actividad: El alumno en forma individual realizará el diseño y planeación del mantenimiento preventivo y predictivo de sistemas que componen a un sistema mecatrónico
Evidencias por desempeño 15%: 1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa elaborado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa elaborado.
Evidencias por producto 60%: 1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa elaborado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa elaborado.
Evidencias de conocimiento 15%: 1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa elaborado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa elaborado.
Evidencias de actitudes 10%: Orden: Evidencias por desempeño.
1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa elaborado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa elaborado.
Limpieza: Evidencias por desempeño
1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa elaborado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa elaborado
Responsabilidad: Evidencias por producto
1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa elaborado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa elaborado
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 18 de 22
Fuentes de Información
Lazo Cerna Humberto, Seguridad Industrial, ED. Diana.
Antonio Creus Instrumentación Industrial, Editorial Alfaomega.
W. G. Holzbock, Instrumentos Para medición y control, ED. CECSA.
William D. Cooper - Albert D. Helfrick, Instrumentación Electrónica Moderna y Técnicas de Medición, Editorial Prentice Hall.
Normas Técnicas de Competencia Laboral, CONOCER.
Wildi y De Vito, Experimentos con equipo eléctrico, Editorial LIMUSA.
Mileaf Harry Electricidad Tomo I y II Editorial LIMUSA.
González Muñiz, Ramón Manual básico de prevención de riesgos laborales Editorial Thompson Paraninfo.
R. J. Tocci, Sistemas Digitales, principio y aplicaciones. Edit. Prentice Hall.
R. Boylestad. Teoría de circuitos electrónicos, ED. Trillas.
Morris Mano. Electrónica Digital. ED. Prentice Hall.
Manual del Ingeniero Electrónico, Mc Graw Hill.
Robert F. Coughlin, Amplificadores Operacionales y circuitos integrados lineales. ED. Prentice Hall
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Hidráulica Nivel Básico. Manual De Estudio.
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Neumática Nivel Básico. Manual De Estudio.
Antonio Gullén Salvador, (1999), Introducción a la Neumática, ED., Alfaomega.
Overseas Vocational Training Association, (1997), Mecatrónica I, II y III manual de instrucción, ED. SEP DGETI.
Fiedler G., (1988), Electroneumática-prácticas avanzadas, Festo Didactic.
Thomson (2000), Paraninfo. Neumática.
Mandano/Acevedo/Pérez, (1992), Controladores lógicos y autómatas programables, ED., Marcombo.
Michel G., (1990), Autómatas programables industriales-arquitectura y aplicaciones, ED., Marcombo
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 19 de 22
Glosario
ACTUADOR: Dispositivo que transforma señales hidráulicas o neumáticas en movimientos lineales o circulares.
AMPERÍMETRO: Instrumento para realizar medición de flujo de corriente en un elemento o circuito.
AUTOMATIZACIÓN: Se le denomina así a cualquier tarea realizada por máquinas en lugar de personas. Es la sustitución de procedimientos manuales por sistemas de cómputo.
BOMBA: Dispositivo Mecánico que impulsa a un fluido en función de una fuerza centrifuga.
CAD: Diseño asistido por computadora.
CALIBRAR: Ajustar los valores de salida de un instrumento a valores deseados, dentro de una tolerancia especificada para valores particulares de la señal de entrada.
CAM: Manufactura asistida por computadora.
CIRCUITO PARALELO: Circuito por donde el total de la corriente se divide por varias ramas y/o elementos. Circuito que tiene más de un camino para la corriente.
CIRCUITO SERIE: Circuito por donde circula la misma corriente por todos los elementos. Circuito que tiene un único camino para la corriente.
CIRCUITO: Es un ciclo, un camino sin interrupciones que permite por ejemplo, que la corriente salga por un lado de la pila y regrese por el otro. También es necesario un circuito para obtener electricidad del tomacorriente.
COMPRESOR: Sistema que permite comprimir aire para ser utilizado por dispositivos neumáticos.
CONDICIONES OPERATIVAS: Valores de los parámetros de funcionamiento de un proceso
CONTROLADOR: Es la parte del software que controla un periférico particular.
CORRIENTE ALTERNA: (CA) Corriente eléctrica que cambia su amplitud y polaridad en forma periódica con el tiempo.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
Página 20 de 22
Glosario
CORRIENTE CONTINUA (CC): Modo de suministro de energía eléctrica donde la polaridad de la tensión se mantiene constante. (Caso contrario a la corriente alterna).
CORRIENTE: Cantidad de carga que circula por un conductor por unidad de tiempo.
DISPOSITIVO: Mecanismo de un aparato o equipo que, una vez accionado, desarrolla de forma automática la función que tiene asignada.
DTI: Diagrama de tubería e instrumentación.
EJE: Cada una de las líneas según las cuales se puede mover el robot o una parte de él (algún elemento de su estructura). Pueden ser ejes o líneas de desplazamiento longitudinal sobre sí mismo (articulación prismática) o ejes de giro (rotación). Cada eje define un grado de libertad del robot.
ELEMENTO: Cada uno de los componentes de la estructura de un manipulador. Pueden ser elemento maestro, esclavo, de unión, Terminal, etc.
EQUIPO DE MEDICIÓN: Conjunto de aparatos de medición con patrones de medida.
ESPECIFICACIONES TÉCNICAS: Condicionamientos de aplicación de un instrumento.
FRECUENCIA: Cantidad de ciclos por segundo de una señal medida en Hertz.
HIDRÁULICA: Ciencia que estudia el movimiento de los equipos usando como fuerza al aceite.
HIDRÁULICO: Es un manipulador cuya energía de movimiento viene proporcionada por un fluido que presiona émbolos. Se consigue una gran potencia en la operación del robot, aunque se pierda precisión.
INFORMACIÓN TÉCNICA: Aplicaciones prácticas del instrumento.
INTERFASE: Circuito o conector que hace posible el "entendimiento" entre dos elementos de hardware, es decir, permite su comunicación.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 21 de 22
Glosario
MANTENIMIENTO: Actividades de control que consisten en mediciones, registro, análisis, reemplazo de partes, corrección, mejoramiento y la eliminación de factores que puedan ser perjudiciales para los equipos.
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
MEDICIÓN: Determinar la cantidad de una magnitud por comparación con un patrón.
MULTÍMETRO: Instrumento de múltiples propósitos, que se puede usar para medir resistencias, voltajes, corrientes, etc.
NEUMATICA: Ciencia que estudia el movimiento de los equipos usando como fuerza el aire.
NEUMÁTICO: Es un manipulador cuya energía de movimiento viene proporcionada por un sistema de aire comprimido (conductos que lo contienen, émbolos de empuje, sistema compresor, etc.).
NOM: Norma oficial mexicana.
NOMENCLATURA: Conjunto de términos técnicos.
NTCL: Norma técnica de competencia laboral
OHMETRO: Instrumento para realizar medición de la oposición al flujo de corriente que presenta un elemento o circuito.
OSCILOSCOPIO: Instrumento utilizado para la medición de la amplitud y período de señales de corriente alterna. El osciloscopio
muestra en la pantalla la forma de onda medida, su forma y su periodo.
POTENCIA: Es la energía (o trabajo) dividido por el tiempo.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 22 de 22
Glosario
PRUEBA: Realizar un ensayo para comprobar ciertas condiciones en un sistema.
REPORTE: Documento que contiene información de una actividad específica.
RESISTENCIA: La oposición que presenta un material al paso de la corriente eléctrica.
SIMBOLOGÍA: Conjunto de símbolos técnicos.
SISTEMA: Conjunto organizado de elementos diferenciados cuya interrelación e interacción supone una función global.
VERIFICAR: Comprobar, probar.
VOLTAJE: Fuerza electromotriz capaz de hacer circular corriente a través de un material.
VOLTÍMETRO: Instrumento para realizar medición de voltaje.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

PPRROOGGRRAAMMAA
DDEE
EESSTTUUDDIIOO
Módulo V
Submódulo II
Noviembre, 2005
TTééccnniiccoo
eenn
MMeeccaatt rróónniiccaa
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
Página 2 de 22
Reforma Curricular del Bachillerato Tecnológico Estructura y Programas de Estudio de la
Carrera de Técnico en Mecatrónica
Profesores que elaboraron la estructura y programas de estudio de la carrera de Técnico en Mecatrónica:
NOMBRE PLANTEL Mario Alberto Clemente Lechuga. Estado de México. Alfredo Tapia Campos. Puebla. Alberto Enrique García Gómez. Campeche. José Juan Vázquez Tovar. San Luís Potosí.
Coordinador(es) de Diseño:
Coordinador del Componente de Formación Profesional:
NOMBRE ESTADO Ismael Enrique Lee Cong Quintana Roo René García Badillo. Veracruz
NOMBRE Espiridión Licea Pérez.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 3 de 22
Directorio
Dr. Reyes S. Tamez Guerra. Secretario de Educación Pública.
Dra. Yolóxochitl Bustamante Diez. Subsecretaria de Educación Media Superior.
Ing. Lorenzo Vela Peña. Director General de Educación Tecnológica Industrial.
Mtro. Roberto Lagarda Lagarda. Coordinador Nacional de Organismos Descentralizados Estatales de CECyTEs.
Lic. Elena Karakowsky Kleyman. Responsable de Desarrollo Académico de los CECyTEs.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 4 de 22
Mensaje para los Maestros
El Modelo de la Educación Media Superior Tecnológica comprende y alienta continuamente un proceso de formación humana en todas las etapas de la vida, a la vez que faculta para responder por nuestros egresados como seres sociales, transformadores, con destrezas adquiridas, creatividad, claridad de criterio y solidaridad. Así mismo, se busca una mayor flexibilidad para el tránsito dentro del sistema bachillerato tecnológico e impulsar las oportunidades de calidad y pertinencia de los procesos educativos que se desarrollan al interior de los planteles, en vinculación estrecha con el medio social.
El presente programa tiene el propósito de orientar el trabajo docente en el componente de formación profesional siguiendo una estructura modular, ya que cada módulo se divide en submódulos, los cuales especifican lo que el alumno será capaz de realizar al término de cada uno en sitios de inserción laboral.
Los módulos de formación profesional se elaboraron de acuerdo con los lineamientos establecidos por la Coordinación Nacional de los CECyTEs, en trabajos colegiados con docentes que cuentan con experiencia en el diseño y operación de programas de educación basada en competencias.
En cada submódulo se presenta el desarrollo didáctico, considerando los resultados de aprendizaje a lograr, las competencias a desarrollar, las estrategias de aprendizaje, los recursos y materiales de apoyo, los criterios y las evidencias para realizar la evaluación.
En los resultados de aprendizaje y sitios de inserción laboral de cada módulo se presenta lo que el alumno será capaz de hacer (los aprendizajes demostrados a través de competencias) y el área en donde podrá laborar.
En las estrategias de aprendizaje se consideran:
El encuadre grupal: proporciona al alumno la información relacionada con los contenidos y competencias a desarrollar, así como los criterios para la evaluación de competencias.
La relación con el entorno: son actividades que contextualizan el escenario y sitios de inserción donde el alumno desarrollará la función laboral.
El desarrollo de las esferas de competencia: son actividades de solución de problemas, demostración de procedimientos técnicos, búsqueda de información con apoyo de las tecnologías de la información y comunicación, investigación de campo y bibliográfica, aplicación de evaluaciones formativas y realimentación.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 5 de 22
El cierre del submódulo: son actividades que sintetizan y realimentan el proceso de aprendizaje, además de evaluar las competencias adquiridas.
Los recursos materiales de apoyo: son los medios necesarios para desarrollar y ejercitar la competencia.
La evaluación de las competencias: proceso mediante el cual se verifica el aprendizaje de acuerdo a los resultados de evaluación a través de las evidencias de conocimiento, desempeño o producto.
En la evaluación de competencias se consideran:
Las evidencias por desempeño: son las habilidades y destrezas que el alumno deberá demostrar al realizar una actividad relacionada con un resultado de aprendizaje o competencia a desarrollar.
Las evidencias por producto: son los productos tangibles que el alumno deberá entregar, como resultado de una actividad relacionada con una competencia a desarrollar.
Las evidencias de conocimiento: son los aprendizajes que manifiestan los alumnos, producto de la aplicación de un instrumento de evaluación.
Las evidencias de actitudes: Son los valores, actitudes y hábitos que el alumno manifiesta al desarrollar una actividad.
Las fuentes de información: es una lista que constituye el acervo básico de consulta para el desarrollo de los contenidos del submódulo.
El glosario: es la lista de palabras técnicas con su respectiva definición.
Cada docente podrá establecer las actividades complementarias para lograr los resultados de aprendizaje de acuerdo con su experiencia, así como sugerencias y/o recomendaciones para la operación del programa.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 6 de 22
Contenido
I. Estructura de la Carrera.
Justificación de la Carrera.
Estructura Curricular del Bachillerato Tecnológico.
Propósito de la carrera.
Perfil profesional de la carrera.
Módulos y submódulos por semestre.
Resultados de aprendizajes y sitios de inserción de los módulos.
II. Programa de Estudio
Nombre del módulo.
Nombre del submódulo y duración.
Resultado de aprendizaje del submódulo.
Competencias a desarrollar.
Estrategias de aprendizaje.
A) Encuadre grupal.
B) Relación con el entorno.
C) Desarrollo de las esferas de competencia.
D) Cierre del submódulo.
E) Recursos materiales de apoyo.
Evaluación de competencias.
III. Fuentes de Información
IV. Glosario
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 7 de 22
Justificación de la Carrera
El mundo globalizado exige a todos los países se preparen para competir, México no es ajeno a esto, por lo que se prepara
con la adquisición de nueva tecnología y la capacitación del personal para el manejo de la misma.
Las empresas que operan en nuestro país cada día mejoran sus procesos de producción automatizándolos para poder ser
competitivos; desde la puerta de un supermercado, un elevador, equipo médico, pequeñas líneas de ensamble, hasta las grandes
industrias como la automotriz, minera, eléctrica, aérea, petrolera, etc.
La carrera de técnico en mecatrónica brinda el personal capacitado en esas nuevas tecnologías a dichas empresas o
industrias, ya que cuenta con los conocimientos y habilidades que le permitirán un excelente desempeño del mantenimiento de
sistemas y equipos cada vez más complejos que incluyen en su operación la unión sinérgica de áreas como son: la programación,
electricidad, electrónica, mecánica, hidráulica, neumática, robótica entre otras (mecatrónica).
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 8 de 22
COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs Estructura Curricular del Bachillerato
Tecnológico en Mecatrónica Clave-TMT-04
1er. Semestre
2o. Semestre
3er. Semestre
4o. Semestre
5o. Semestre
6o. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica
correspondiente (1) 5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral
y Escrita II 4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica
correspondiente (2) 5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas
Lectura, Expresión Oral y Escrita I
4 horas
Módulo I Diagnosticar circuitos
eléctricos y electrónicos en
equipos mecatrónicos
17 horas
Módulo II Elaborar piezas mecánicas
con torno y fresa convencional y de control
numérico 17 horas
Módulo III Manejar sistemas de control secuencial
17 horas
Módulo IV Aplicar procesos de
manufactura asistido por computadora
12 horas
Módulo V Realizar mantenimiento
a sistemas mecatrónicos
12 horas
COMPONENTE DE FORMACIÓN BÁSICA
1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA
480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico Administrativas Administración (1) Economía (2)
Área Químico Biológicas Bioquímica (1) Biología Contemporánea (2)
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 9 de 22
Estructura de la Carrera de Técnico en Mecatrónica
Propósito de la Carrera:
Al término de la carrera el egresado será capaz de realizar el mantenimiento a sistemas mecatrónicos.
Perfil Profesional:
Al término de la carrera el egresado será capaz de laborar en áreas donde operen sistemas automatizados para la generación de productos y servicios.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 10 de 22
Módulos y Submódulos de la Carrera de Técnico en Mecatrónica
Duración
Módulos Submódulos Horas Semana Total
I.-Realizar mantenimiento a sistemas eléctricos y electrónicos analógicos.
9 2° I.-Diagnosticar circuitos eléctricos y
electrónicos en equipos mecatrónicos. II.-Realizar mantenimiento a sistemas electrónicos digitales.
8
272 Horas
I.-Elaborar piezas mecánicas con torno y fresadora convencionales.
9 3°
II.-Elaborar piezas mecánicas con torno y fresa convencional y de control numérico.
II.-Elaborar piezas mecánicas con máquinas de control numérico.
8
272 Horas
I.-Manejar sistemas mecatrónicos. 8 4° III.-Manejar sistemas de control
secuencial. II.-Automatizar procesos por medio de PLC. 9
272 Horas
I.-Elaborar piezas mecánicas por medio de CAD/CAM.
7 5° IV.-Aplicar procesos de manufactura
asistido por computadora. II.-Manipular robots en procesos de manufactura integral.
5
192 Horas
I.-Realizar mantenimiento predictivo y preventivo a sistemas mecatrónicos.
4
Sem
estr
e
6° V.-Realizar mantenimiento a sistemas mecatrónicos. II.-Realizar mantenimiento correctivo a
sistemas mecatrónicos. 8
192 Horas
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
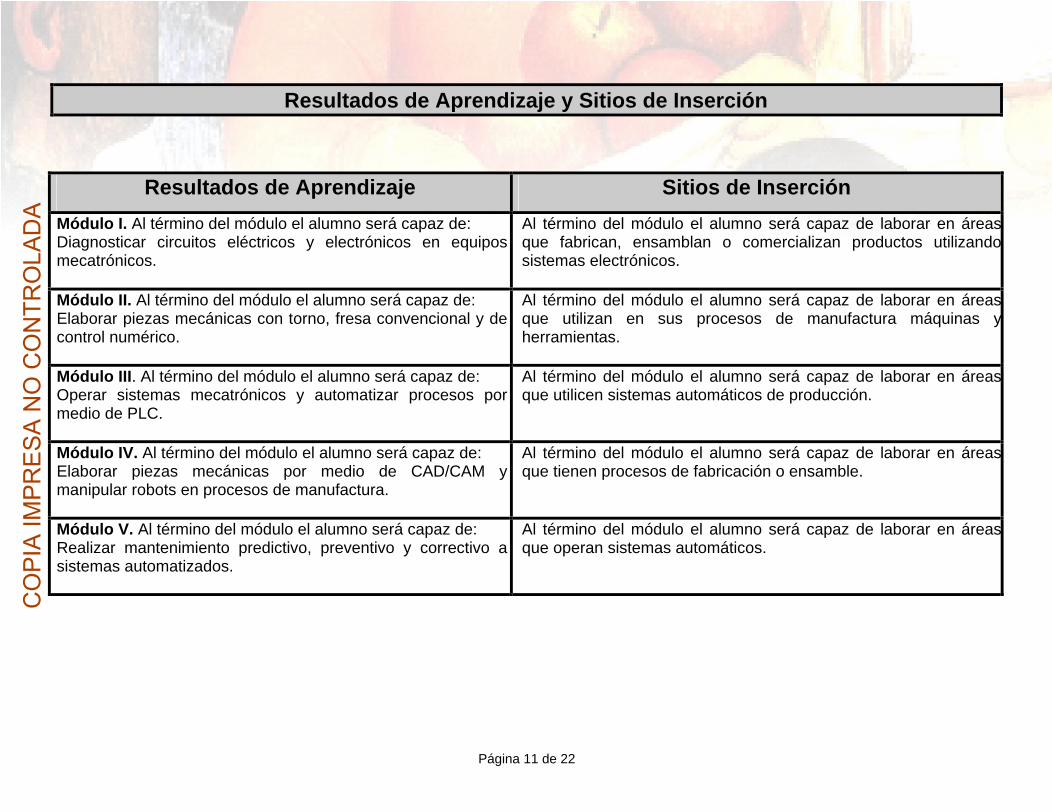
Página 11 de 22
Resultados de Aprendizaje y Sitios de Inserción
Resultados de Aprendizaje Sitios de Inserción
Módulo I. Al término del módulo el alumno será capaz de: Diagnosticar circuitos eléctricos y electrónicos en equipos mecatrónicos.
Al término del módulo el alumno será capaz de laborar en áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Módulo II. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas con torno, fresa convencional y de control numérico.
Al término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de manufactura máquinas y herramientas.
Módulo III. Al término del módulo el alumno será capaz de: Operar sistemas mecatrónicos y automatizar procesos por medio de PLC.
Al término del módulo el alumno será capaz de laborar en áreas que utilicen sistemas automáticos de producción.
Módulo IV. Al término del módulo el alumno será capaz de: Elaborar piezas mecánicas por medio de CAD/CAM y manipular robots en procesos de manufactura.
Al término del módulo el alumno será capaz de laborar en áreas que tienen procesos de fabricación o ensamble.
Módulo V. Al término del módulo el alumno será capaz de: Realizar mantenimiento predictivo, preventivo y correctivo a sistemas automatizados.
Al término del módulo el alumno será capaz de laborar en áreas que operan sistemas automáticos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 12 de 22
Programa de Estudio
Módulo V Realizar mantenimiento a sistemas mecatrónicos Duración 192 Horas
Submódulo II Realizar mantenimiento correctivo a sistemas mecatrónicos. Duración 8 hrs/sem
Resultado de Aprendizaje
Al terminar el submódulo el alumno será capaz realizar mantenimiento correctivo de los diferentes sistemas que conforman un sistema mecatrónico.
Dat
os
Gen
eral
es
Competencias a Desarrollar
1. Realizar mantenimiento correctivo a sistemas electromecánicos de acuerdo a políticas de la empresa.
2. Realizar mantenimiento correctivo a sistemas electrónicos de acuerdo a políticas de la empresa.
Estrategia de Aprendizaje
A) Encuadre grupal: A través de una exposición el maestro deberá:
Presentar el submódulo.
Informar el contenido del submódulo.
Informar los resultados de aprendizaje.
Informar las competencias a desarrollar.
Informar sobre las evidencias de desempeño y producto esperadas.
Informar sobre los criterios e instrumentos de evaluación.
Informar sobre las normas de competencia laboral.
Realizar un examen exploratorio.
Realizar una actividad donde el docente asegure la comprensión del contenido del encuadre.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 13 de 22
Estrategia de Aprendizaje B) Relación con el entorno:
El docente realiza visitas con los alumnos a empresas de servicios o manufactura en donde se observe la operación de sistemas mecatrónicos con el fin de obtener un panorama real de lo que es la aplicación del mantenimiento correctivo para mantener las líneas de manufactura funcionando sin fallas.
C) Desarrollo de las esferas de competencia:
1. Realizar mantenimiento correctivo a sistemas electromecánicos de acuerdo a políticas de la empresa.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar el mantenimiento correctivo reportado en la orden de trabajo de:
Interruptores de media tensión.
Interruptores de potencia.
Interruptores de baja tensión.
Contactores y relevadores, (de tiempo y conteo).
Generadores y Motores eléctricos, servomotores.
Interruptores de Posición, Presión, Nivel, Flujo.
Arrancadores.
Interruptores de sobre carga.
Bandas.
Rodamientos.
Retenes y sellos.
Poleas.
Juntas.
Engranes.
Mecanismos.
Acoplamientos.
Lubricantes.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 14 de 22
Estrategia de Aprendizaje
Refrigerantes.
Válvulas.
Cilindros.
Compresores.
Tanque de almacenamiento.
Unidades de mantenimiento (Purga o lo que aplique)
Motores.
Líneas de distribución.
Conexiones.
Válvulas.
Cilindros.
Bombas.
Tanque de almacenamiento (niveles, fugas o lo que aplique).
Intercambiadores de calor.
Motores.
Líneas de distribución.
Conexiones.
Responder a las emergencias de acuerdo a los procedimientos establecidos por la empresa.
Llenar bitácoras de mantenimiento.
Conocimientos sobre:
Mediciones de Flujos, Presiones, Temperaturas, Niveles, Ruidos, Emisiones, Fugas, lo aplicable.
Nomenclatura y simbología de diagramas eléctricos, neumáticos e hidráulicos.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 15 de 22
Estrategia de Aprendizaje
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñara actividades para que el alumno demuestre la competencia: Realizar el plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa
2. Realizar el mantenimiento correctivo a sistemas electrónicos de acuerdo a políticas de la empresa.
El docente diseñará actividades y escenarios para que el alumno desarrolle:
Habilidades y destrezas para:
Realizar el mantenimiento correctivo reportado en la orden de trabajo de.
Sensores y transductores.
Fuentes de alimentación.
Elementos de protección y seguridad.
Acondicionadores de señales.
Elementos de temporización de estado sólido.
Elementos de conteo de estado sólido.
Elementos de almacenamiento de estado sólido o magnético.
Encoders.
Controladores Lógicos Programables.
Controladores.
Variadores de velocidad.
Manejadores de servomotores.
Responder a las emergencias de acuerdo a los procedimientos establecidos por la empresa.
Llenar de bitácoras de mantenimiento.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A
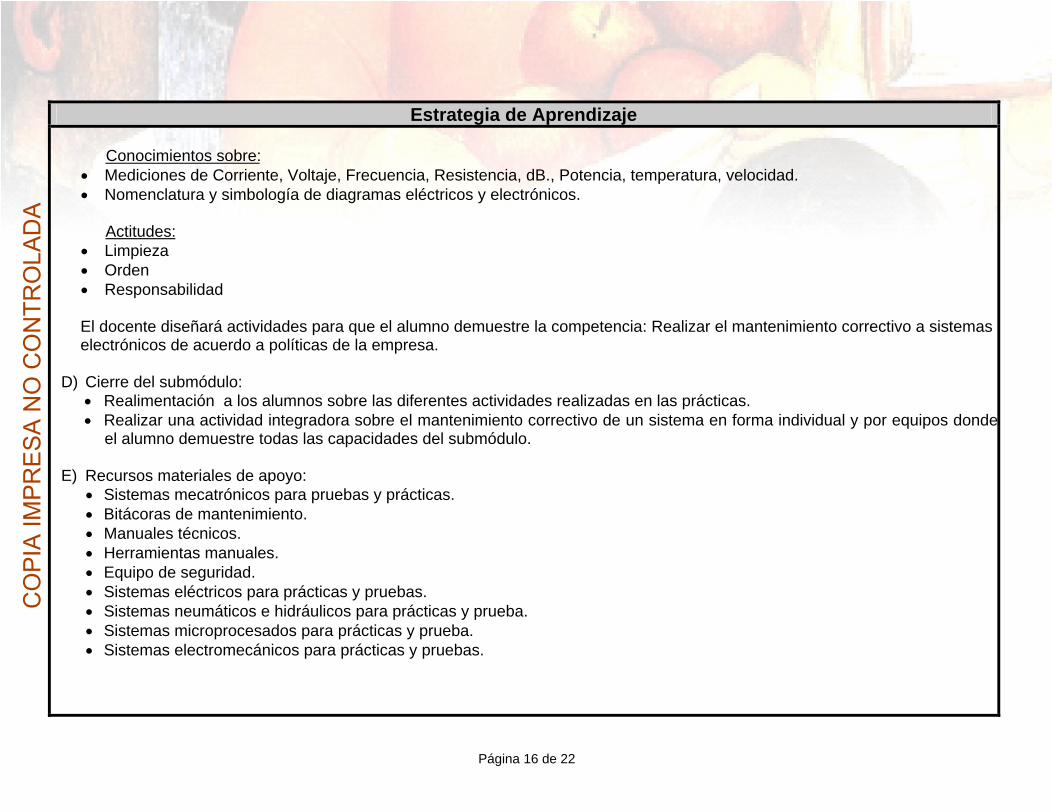
Página 16 de 22
Estrategia de Aprendizaje
Conocimientos sobre:
Mediciones de Corriente, Voltaje, Frecuencia, Resistencia, dB., Potencia, temperatura, velocidad.
Nomenclatura y simbología de diagramas eléctricos y electrónicos.
Actitudes:
Limpieza
Orden
Responsabilidad
El docente diseñará actividades para que el alumno demuestre la competencia: Realizar el mantenimiento correctivo a sistemas electrónicos de acuerdo a políticas de la empresa.
D) Cierre del submódulo:
Realimentación a los alumnos sobre las diferentes actividades realizadas en las prácticas.
Realizar una actividad integradora sobre el mantenimiento correctivo de un sistema en forma individual y por equipos donde el alumno demuestre todas las capacidades del submódulo.
E) Recursos materiales de apoyo:
Sistemas mecatrónicos para pruebas y prácticas.
Bitácoras de mantenimiento.
Manuales técnicos.
Herramientas manuales.
Equipo de seguridad.
Sistemas eléctricos para prácticas y pruebas.
Sistemas neumáticos e hidráulicos para prácticas y prueba.
Sistemas microprocesados para prácticas y prueba.
Sistemas electromecánicos para prácticas y pruebas.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 17 de 22
Evaluación de Competencias Actividad: El alumno en forma individual y en equipos realizará el mantenimiento correctivo de sistemas que componen a un sistema mecatrónico.
Evidencias por desempeño 20%: 1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa realizado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa realizado.
Evidencias por producto 70%: 1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa realizado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa realizado.
Evidencias de conocimientos 0%:
Evidencias de actitudes 10%: Limpieza: Evidencias por producto
1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa realizado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa realizado.
Orden: Evidencias por desempeño
1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa realizado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa realizado.
Responsabilidad: Evidencias por producto
1. El plan de mantenimiento a sistemas electromecánicos de acuerdo a políticas de la empresa realizado. 2. El plan de mantenimiento a sistemas electrónicos de acuerdo a políticas de la empresa realizado.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 18 de 22
Fuentes de información
Lazo Cerna Humberto, Seguridad Industrial, ED. Diana.
Antonio Creus Instrumentación Industrial, Editorial Alfaomega.
W. G. Holzbock, Instrumentos Para medición y control, ED. CECSA.
William D. Cooper - Albert D. Helfrick, Instrumentación Electrónica Moderna y Técnicas de Medición, Editorial Prentice Hall.
Normas Técnicas de Competencia Laboral, CONOCER.
Wildi y De Vito, Experimentos con equipo eléctrico, Editorial LIMUSA.
Mileaf Harry Electricidad Tomo I y II Editorial LIMUSA.
González Muñiz, Ramón Manual básico de prevención de riesgos laborales Editorial Thompson Paraninfo.
R. J. Tocci, Sistemas Digitales, principio y aplicaciones. Edit. Prentice Hall.
R. Boylestad. Teoría de circuitos electrónicos, ED. Trillas.
Morris Mano. Electrónica Digital. ED. Prentice Hall.
Manual del Ingeniero Electrónico, Mc Graw Hill.
Robert F. Coughlin, Amplificadores Operacionales y circuitos integrados lineales. ED. Prentice Hall
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Hidráulica Nivel Básico. Manual De Estudio.
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Neumática Nivel Básico. Manual De Estudio.
Antonio Gullén Salvador, (1999), Introducción a la Neumática, ED., Alfaomega.
Overseas Vocational Training Association, (1997), Mecatrónica I, II y III manual de instrucción, Ed. SEP DGETI.
Fiedler G., (1988), Electroneumática-prácticas avanzadas, Festo Didactic.
Thomson (2000), Paraninfo. Neumática.
Mandano/Acevedo/Pérez, (1992), Controladores lógicos y autómatas programables, ED., Marcombo.
Michel G., (1990), Autómatas programables industriales-arquitectura y aplicaciones, ED., Marcombo
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 19 de 22
Glosario
ACTUADOR: Dispositivo que transforma señales hidráulicas o neumáticas en movimientos lineales o circulares.
AMPERÍMETRO: Instrumento para realizar medición de flujo de corriente en un elemento o circuito.
AUTOMATIZACIÓN: Se le denomina así a cualquier tarea realizada por máquinas en lugar de personas. Es la sustitución de procedimientos manuales por sistemas de cómputo.
BOMBA: Dispositivo Mecánico que impulsa a un fluido en función de una fuerza centrifuga.
CAD: Diseño asistido por computadora.
CALIBRAR: Ajustar los valores de salida de un instrumento a valores deseados, dentro de una tolerancia especificada para valores particulares de la señal de entrada.
CAM: Manufactura asistida por computadora.
CIRCUITO PARALELO: Circuito por donde el total de la corriente se divide por varias ramas y/o elementos. Circuito que tiene más de un camino para la corriente.
CIRCUITO SERIE: Circuito por donde circula la misma corriente por todos los elementos. Circuito que tiene un único camino para la corriente.
CIRCUITO: Es un ciclo, un camino sin interrupciones que permite por ejemplo, que la corriente salga por un lado de la pila y regrese por el otro. También es necesario un circuito para obtener electricidad del tomacorriente.
COMPRESOR: Sistema que permite comprimir aire para ser utilizado por dispositivos neumáticos.
CONDICIONES OPERATIVAS: Valores de los parámetros de funcionamiento de un proceso
CONTROLADOR: Es la parte del software que controla un periférico particular.
CORRIENTE ALTERNA: (CA) Corriente eléctrica que cambia su amplitud y polaridad en forma periódica con el tiempo.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA
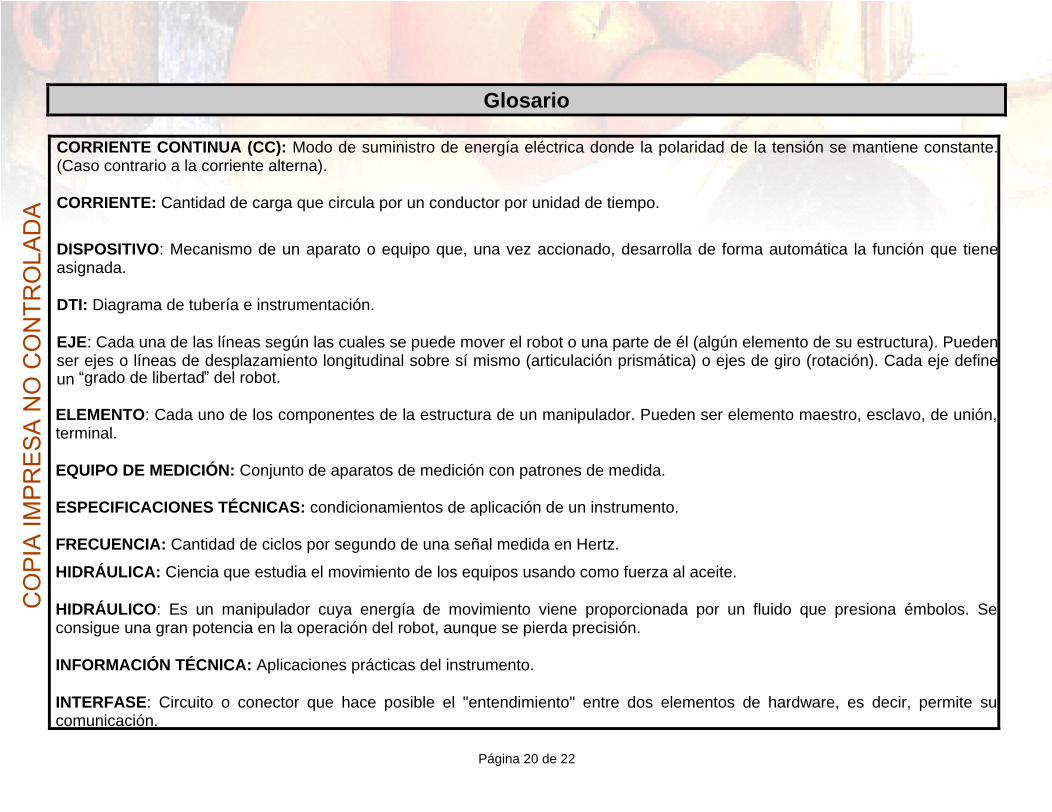
Página 20 de 22
Glosario
CORRIENTE CONTINUA (CC): Modo de suministro de energía eléctrica donde la polaridad de la tensión se mantiene constante. (Caso contrario a la corriente alterna).
CORRIENTE: Cantidad de carga que circula por un conductor por unidad de tiempo.
DISPOSITIVO: Mecanismo de un aparato o equipo que, una vez accionado, desarrolla de forma automática la función que tiene asignada.
DTI: Diagrama de tubería e instrumentación.
EJE: Cada una de las líneas según las cuales se puede mover el robot o una parte de él (algún elemento de su estructura). Pueden ser ejes o líneas de desplazamiento longitudinal sobre sí mismo (articulación prismática) o ejes de giro (rotación). Cada eje define un grado de libertad del robot.
ELEMENTO: Cada uno de los componentes de la estructura de un manipulador. Pueden ser elemento maestro, esclavo, de unión, terminal.
EQUIPO DE MEDICIÓN: Conjunto de aparatos de medición con patrones de medida.
ESPECIFICACIONES TÉCNICAS: condicionamientos de aplicación de un instrumento.
FRECUENCIA: Cantidad de ciclos por segundo de una señal medida en Hertz.
HIDRÁULICA: Ciencia que estudia el movimiento de los equipos usando como fuerza al aceite.
HIDRÁULICO: Es un manipulador cuya energía de movimiento viene proporcionada por un fluido que presiona émbolos. Se consigue una gran potencia en la operación del robot, aunque se pierda precisión.
INFORMACIÓN TÉCNICA: Aplicaciones prácticas del instrumento.
INTERFASE: Circuito o conector que hace posible el "entendimiento" entre dos elementos de hardware, es decir, permite su comunicación.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A

Página 21 de 22
Glosario
MANTENIMIENTO: Actividades de control que consisten en mediciones, registro, análisis, reemplazo de partes, corrección, mejoramiento y la eliminación de factores que puedan ser perjudiciales para los equipos.
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
MÁQUINA: Artificio o conjunto de aparatos combinados para recibir cierta forma de energía, transformarla y restituirla en otra más adecuada o para producir un efecto determinado.
MEDICIÓN: Determinar la cantidad de una magnitud por comparación con un patrón.
MULTÍMETRO: Instrumento de múltiples propósitos, que se puede usar para medir resistencias, voltajes, corrientes, etc.
NEUMATICA: Ciencia que estudia el movimiento de los equipos usando como fuerza el aire.
NEUMÁTICO: Es un manipulador cuya energía de movimiento viene proporcionada por un sistema de aire comprimido (conductos que lo contienen, émbolos de empuje, sistema compresor, etc.).
NOM: Norma oficial mexicana.
NOMENCLATURA: Conjunto de términos técnicos.
NTCL: Norma técnica de competencia laboral
OHMETRO: Instrumento para realizar medición de la oposición al flujo de corriente que presenta un elemento o circuito.
OSCILOSCOPIO: Instrumento utilizado para la medición de la amplitud y período de señales de corriente alterna. El osciloscopio
muestra en la pantalla la forma de onda medida, su forma y su periodo.
POTENCIA: Es la energía (o trabajo) dividido por el tiempo.
CO
PIA
IMP
RE
SA
NO
CO
NTR
OLA
DA

Página 22 de 22
Glosario
PRUEBA: Realizar un ensayo para comprobar ciertas condiciones en un sistema.
REPORTE: Documento que contiene información de una actividad específica.
RESISTENCIA: La oposición que presenta un material al paso de la corriente eléctrica.
SIMBOLOGÍA: Conjunto de símbolos técnicos.
SISTEMA: Conjunto organizado de elementos diferenciados cuya interrelación e interacción supone una función global.
VERIFICAR: Comprobar, probar.
VOLTAJE: Fuerza electromotriz capaz de hacer circular corriente a través de un material.
VOLTÍMETRO: Instrumento para realizar medición de voltaje.
C
OP
IA IM
PR
ES
A N
O C
ON
TRO
LAD
A