instituto politÉcnico nacionalsappi.ipn.mx/cgpi/archivos_anexo/20070707_5125.pdf · 2011-11-14 ·...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
COORDINACION GENERAL DE POSGRADO E INVESTIGACION
INFORME TÉCNICO FINAL DE PROYECTOS DE INVESTIGACION 2007
I. IDENTIFICACIÓN DEL PROYECTO.
ESCUELA, CENTRO O UNIDAD:ESIME, Culhuacan CLAVE DEL PROYECTO: 20070707
TITULO: DESARROLLO Y ANÁLISIS DE UN MÉTODO PARA EL DIAGNÓSTICO DE TURBINAS DE GAS CON BASE EN LA CLASIFICACIÓN UNIVERSAL
PROGRAMA EN DONDE SE UBICA EL PROYECTO:
PERIODO EN QUE SE REALIZO EL PROYECTO: del 01 01 07 al 31 12 07 d m a d M a
II. RESPONSABILIDAD TÉCNICA Y ADMINISTRATIVA.
Indicar nombre e incluir firmas autógrafas (en el ejemplar impreso) de los responsables técnicos y administrativos. Vo. Bo.
Dr. Igor Loboda
Ing. Ernesto Mercado Escutia
Director del proyecto Director de ESIME, Culhuacan
Teléfono del director(a) del proyecto: 56562058 o ext73254 Fecha de elaboración del informe: 23 01 08 d m a
2
III. RESUMEN
Normalmente, las turbinas de gas industriales operan sin paros por un periodo largo de uso. Durante cada ciclo de operación el control y las condiciones ambientales pueden variar considerablemente. Por esto el monitoreo de una turbina de gas no debe ser interrumpido para todas condiciones operacionales y el sistema de monitoreo necesita métodos apropiados para este propósito. Este artículo introduce la clasificación universal de fallas de turbina de gas que permite diagnosticar en condiciones de operación variables. Este concepto se aplica para una planta de potencia en regímenes estacionarios y transitorios.
Para la simulación de fallas en el conducto de flujo de esta planta se usan un modelo no lineal estático y un modelo no lineal dinámico. La clasificación de fallas es representada por una muestra de valores medidos (patrones) los cuales incluyen errores de medición. Esta muestra alimenta a una red neuronal usada después para realizar el diagnóstico. La red neuronal entrenada se somete después a una prueba estadística que nos permite calcular las probabilidades de un diagnóstico correcto. Con estas probabilidades, la clasificación propuesta se compara con la convencional. Esta comparación es trazada bajo una variedad de condiciones del diagnóstico. Los resultados demuestran que la disminución en confiabilidad del diagnóstico inducida por la clasificación universal es relativamente baja. Por otro lado, el uso de esta clasificación ofrece el monitoreo continuo y simplificación drástica de los algoritmos empleados.
Palabras claves: diagnóstico de turbinas de gas, clasificación de fallas universal, modelo termodinámico, redes neuronales, probabilidad de la diagnosis correcta.
IV. INTRODUCCIÓN
El deterioro de turbinas de gas afecta su rentabilidad y los costos de operación
considerablemente. Por consiguiente, una turbina de gas comúnmente tiene un sistema diagnóstico. Estas sistemas ampliamente usados hacen posible monitoreo de la maquina, predicen cambios de su estado en el futuro, identifican tipo de falla y su localización. Una parte importante de un sistema diagnóstico incluye los algoritmos de la localización de fallas que usan variables medidas en el conducto de flujo, como presiones y temperaturas del flujo, velocidades de rotación, y consumo de combustible /1/.
Comúnmente las fallas que afectan el desempeño de los componentes de turbina de gas (compresores, cámaras combustión, turbinas, etc.) son: obstrucción de los filtros de aire, contaminación y corrosión de superficies aerodinámicas, el aumento de claros en los alabes, desgaste en los sellos, quemaduras en los elementos de cámara de combustión y los alabes la turbina. Todas estas fallas evolucionan progresivamente por periodos prolongados y tienen que ser localizadas por las mediciones en el conducto de flujo /1,2 /.
Un poco de peculiaridades y tendencias en diagnóstico de turbina de gas son dignas de aviso. El número total grande de artículos en el campo nos permite mencionar sólo los trabajos que aproximan estrechamente a nuestra investigación.
Los despliegues de los mecanismos de deterioración mencionados dependen de la severidad de degradación, las condiciones de operación de la maquina, su tipo, y incluso las particularidades especificas de la maquina. De las numerosas fallas antes mencionadas tenemos que formar un número finito de clases. Hay varias maneras de construir estas clasificaciones y todas se relacionan a los componentes de turbina de gas. Teóricamente, una clasificación de fallas puede derivarse de pruebas reales o datos del funcionamiento. Pero en realidad los datos reales para hacer clasificación representativa no son suficientes normalmente. Mientras ha habido algunos informes de fallas reales que son consideradas, en particular, la contaminación

3
del compresor /2-4 /, el volumen de tal información de la falla está bastante limitado. Lo anterior ayuda a comprender por que se usan modelos matemáticos /2,4,5 / para describir las clases.
El procedimiento normal antes de hacer una clasificación es generar desviaciones de las mediciones actuales de sus valores nominales que corresponden a la turbina de gas en una condición de un funcionamiento correcto. Las clases se forman y el diagnóstico se realiza en espacio multidimensional de tales desviaciones. Notablemente, estudios del diagnóstico se basan en los métodos generales de la teoría de reconocimiento de patrones. Algunos de los métodos que podemos mencionar para su análisis son: método de Bayes /7 /, teoría de lógica difusa /2 /, redes neuronales /2,5,8,9 /. Las últimas están ganando aceptación extendida cada vez más.
Desde el principio, el diagnóstico de turbinas de gas se ha aplicado para regímenes estacionarios. No obstante, el enfoque de las actuales investigaciones ha cambiado la tendencia: los regimenes transitorios se analizan teóricamente y prácticamente ahora /2,5,10/. Eso permite ampliar el alcance del diagnóstico substancialmente y promete aumentar la confiabilidad de sus resultados.
La realidad que el análisis se extiende para incluir procesos transitorios no significa necesariamente que ese tipo diagnóstico puede llevarse a cabo fácilmente a cualquier proceso. El punto es que la descripción de las clases generalmente depende de condiciones ambientales (presión atmosférica, temperatura, y humedad) y variables de control (consumo de combustible.). Un cambio en estas condiciones implica reconstrucción de la clasificación que significativamente complica un diagnóstico rápido, efectuado en tiempo real.
El problema del impacto de las condiciones de operación hacia el proceso de diagnóstico no se ha cubierto adecuadamente en la literatura. La mayoría de los autores examinan sólo un régimen estacionario o transitorio las condiciones fijas de operación. Como un ejemplo, el estudio /5/, usando redes neuronales para el diagnóstico de turbina de gas a los regimenes transitorios, considera sólo un proceso transitorio bajo condiciones fijas en el ambiente y el cambio sólo en la variable de control. Otros trabajos, por ejemplo /1/, considerando el diagnóstico en diferentes regímenes estacionarios, usan las formulas de reducción a un régimen. Sin embargo, aparte de tener errores propios, tal las formulas de reducción son de poco provecho para el diagnósticos en regímenes transitorios.
Nuestros estudios se enfocan a desarrollar y probar algoritmos de diagnóstico para turbinas de gas ampliamente usada – turboeje de dos rotores y de la aplicación industrial. Nosotros encontramos que la descripción de las fallas depende poco del cambio en las condiciones de operación. Esta conclusión nos incitó crear una clasificación de fallas independiente de las condiciones de operación (clasificación universal) /11/. Para sostener la clasificación propuesta en este informe, desarrollamos en base de las redes neuronales los algoritmos de diagnóstico para los regímenes estacionarios y transitorios. El proceso diagnóstico con estos algoritmos que toma en cuenta los errores aleatorios de medición es sometido por las pruebas estadísticas. Se usan las probabilidades del verdadero diagnóstico encontradas durante las pruebas como el criterio de eficacia del diagnóstico. Con este criterio se comparan la clasificación universal y la convencional en las condiciones estáticas y dinámicas.
Este informe desarrolla y comprensivamente examina el concepto de la clasificación universal. Nosotros estudiamos el impacto de cada factor de las condiciones de operación en la confiabilidad del diagnóstico que usa esta clasificación sugerida. El impacto global de las variaciones en todas las variables también es examinado. Para hacer conclusiones más firmes, los cálculos más importantes con la clasificación universal se repiten para tipos diferentes de clases (singulares y múltiples). Una estimación de exactitud de las probabilidades obtenidas con la prueba estadística nos ayuda distinguir fluctuaciones aleatorias de las probabilidades y sus cambios sistemáticos a causa de los efectos estudiados.
**************** Sección 2 describen los modelos termodinámicos para un estado estable y varias fallas en
la planta de potencia bajo estudio. Sección 3 presenta un acercamiento empleó del diagnóstico, el

4
cálculo de índices de confiabilidad, y la prueba de la clasificación universal. La clasificación universal es considerada primero en la Sección 4 para el caso de estados estacionarios y Sección 5 se estudia diagnóstico para estados transitorios. Se discuten los resultados y conclusiones en Sección 6.
V. MÉTODOS Y MATERIALES
5.1. Simulación del desempeño de la turbina de gas
La implementación de modelos termodinámicos, influenciado de muchas maneras por los trabajos de H. I. H. Saravanamuttoo /ver 4 por ejemplo/, se ha vuelto un procedimiento normal en diagnóstico de turbinas de gas. Remplazando la acumulación costosa de datos reales de largo tiempo, los modelos matemáticos también pueden proporcionar nueva información no disponible en práctica. Los modelos estático y dinámico para la turbina industrial de gas empleada en este informe pueden caracterizarse como no lineales, unidimensionales y basados en la descripción de componentes de motor.
El modelo estático calcula variables medidas en el conducto de flujo →
Y (ver Apéndice I) bajo las condiciones de operación estacionarias. El vector de variables de control y condiciones ambientales
→U introduce en el modelo las condiciones de operación de la maquina. El
desempeño de los componentes de la turbina de gas se representa en los cálculos por las características de los componentes dadas en forma tabular. El vector de factores de corrección
→
Θ introduce en el modelo la degradación (fallas) de los componentes. Se presentan los elementos de este vector en Tabla A2 en Apéndice II. Ellos permiten cambiar el desempeño de los componentes en una dirección dada y simulan varias fallas así.
Normalmente, las secciones del calculo de conducto de flujo se localizan antes y después de cada componente. El cálculo se realiza sucesivamente desde la entrada de aire hasta la salida de gases. Por consiguiente, variables de salida de un componente sirven como variables de entrada para el siguiente componente. Un rasgo notable de tal cálculo secuencial es el hecho que algunas variables del conducto de flujo son aproximadamente determinadas en el primer uso, por lo cual el cálculo necesita ser ajustado. Para emparejar las variables del conducto de flujo un sistema de ecuaciones no lineales se forma y se resuelve. Este sistema refleja las condiciones de de operación de los componentes en un régimen estacionario. El cálculo secuencial se lleva a cobo muchas veces dentro del procedimiento iterativo por resolver este sistema, y la exactitud de variables de conducto de flujo se mejora gradualmente resultando al fin del cálculo en la dependencia deseada exacta ),(
→→→Θ= UFY .
Los valores nominales de factores de corrección 0→Θ corresponden a un buen estado del
motor. Para simular falla, se introducen en el modelo los cambios →Θδ . Cuando los cambios
→Θδ
asociados con las fallas reales son pequeños, la dependencia )(→→ΘY puede ser lineal. El modelo
lineal →→Θ= δδ HY se usa para simular las fallas cuando los requisitos de exactitud son
relativamente bajos. Ya que la matriz de influencia H generalmente depende de las condiciones de operación, se recalcula para cada nuevo régimen estacionario, para el cual el modelo es aplicado. Todavía se usan modelos lineales en el diagnóstico turbina de gas /9/ aunque ellos pueden causar errores /12 / notables.
En el caso de los regímenes transitorios, el vector →
U es una función de tiempo. Además la variable t se agrega a los parámetros de la entrada. Entonces, el modelo dinámico puede ser representado por la función ),),(( ttUFY
→→→Θ= . Del punto de vista matemático, esta función es el

5
resultado de resolver el sistema de ecuaciones diferenciales que reflejan la conducta de la unidad de turbina de gas durante los procesos transitorios. A cada paso de tiempo, su solución constituye un punto de operación cuasi-estacionario. A diferencia de la operación estacionaria, en la cual el modelo estático solo define un punto en el espacio
→
Y , el proceso transitorio calculado es una
curva )(tY→
en el mismo espacio. Esta curva se escribe como un juego de m puntos cuasi-
estacionarios )(),...,(),( 21 mtYtYtY→→→
. En la siguiente sección se describen las fallas de desarrollo variable simuladas por los
modelos estático y dinámico descritos arriba.
5.2. Clasificación de fallas (Metas 1 y 3)
5.2.1. Espacio diagnóstico. Comúnmente para sacar una información diagnóstica útil de los datos de medición crudos,
antes del diagnóstico mismo se calculan las desviaciones de medidas actuales *iY de sus valores
nominales ),( 0→→ΘUYi . Estas desviaciones se escriben en forma relativa y se normalizan para
facilitar simulación y reconocimiento de fallas. Para la operación estacionaria la desviación se define para la variable *
iY como:
Yii
iii
UY
UYYZσ),(
),(
0
0*
*→→
→→
Θ
Θ−= . (1)
En esta expresión, el término Yiσ es la amplitud de las posibles fluctuaciones aleatorias de la
fracción ),(
),(
0
0*
→→
→→
Θ
Θ−
UY
UYY
i
ii
. La amplitud Yiσ se calcula mediante el análisis de las mediciones reales y
permite la normalización de los errores de la desviación (1). Se dan los valores Yiσ , empleados más allá en los cálculos, en Apéndice I. Ellos son determinados en los datos del mantenimiento de la turbina industrial de gas como se describe en /13/.
En la simulación, las desviaciones se componen de dos componentes ε+= ii ZZ * . La componente sistemática
Yii
iii
UY
UYUYZ
σ
δ
),(
),(),(
0
00→→
→→→→→
Θ
Θ−Θ+Θ= (2)
es inducida por las fallas introducidas en el modelo termodinámico. La componente ε toma en cuenta los posibles errores en las desviaciones y es una variable aleatoria con distribución dentro del intervalo (-1,1). Un vector simulado
→→→
+= εZZ * corresponde a las desviaciones que se calculan en práctica para las medidas reales.
Las desviaciones para los puntos de la curva del proceso transitorio son determinadas de la
misma manera. Estas desviaciones se encuentran para cada par de puntos análogos )( jtY→
y
)(0 jtY→
, de los cuáles un punto corresponde a una falla introducida, mientras el otro es asociado con un estado normal. Tales desviaciones, calculadas sucesivamente para todos m puntos de la curva del proceso transitorio, forman el vector de desviaciones generalizado
→*W . En un espacio
diagnóstico →Z este vector es representado por la trayectoria de m puntos. Vectores *
→Z y
→*W son
los elementos que constituyen las clasificaciones formadas para las condiciones estáticas y dinámicas.
6
5.2.2. Principios para desarrollar las clasificaciones de fallas
Las clases de fallas de turbina de gas analizada se forman de la hipótesis de la teoría de reconocimiento de patrones que el objeto del reconocimiento sólo puede pertenecer a única de q siguientes clases prefijadas
qDDD ,...,, 21 . (3) Esta clasificación corresponde a una flota hipotética de motores con diferentes fallas de
severidad variable. Cada clase es representada por un juego de patrones - puntos *→Z o
trayectorias →
*W - en el espacio de desviaciones normalizadas. Deterioración del conducto flujo debido al funcionamiento normal puede ser representada en la clasificación como una clase separada.
Sobre el curso de la simulación estadística de las clases, el desarrollo de la falla es
determinado por la distribución uniforme de cambios →Θδ dentro del intervalo (0, -5%). El
izquierdo límite "nulo" implica que las fallas incipientes también se consideran, lo que permite cumplir los requisitos para un diagnóstico temprano /1/. Cinco por ciento del límite derecho corresponden aproximadamente a la pérdida de la maquina de capacidad para trabajo. Se generan
errores aleatorios →ε durante la simulación según la distribución de Gauss. La totalidad de
patrones de todas las clases forma una muestra de referencia Zr para los regímenes estacionarios o Wr para los transitorios.
Se desarrollan cuatro variaciones de la clasificación, determinadas por el tipo y número de clases, por verificar la clasificación universal propuesta bajo condiciones diferentes. Tipo de clase depende del número de factores de corrección para formar la clase.
La variación de un solo factor de corrección para cada clase resulta en la Variación A1 de clasificación, cual consiste en 8 clases singulares. El uso de la clasificación se lleva a cabo que el desarrollo de una falla real específica tiene sólo una dirección definida en el espacio de desviación.
Variación A1 es ligeramente diferente a la Variación A por la composición de los factores de corrección usados.
En Variación B dos parámetros del mismo componente son variados independientemente para formar una clase que abraza todas las fallas del componente (clase de falla múltiple). Cuatro clases incluidas en esta variación corresponden a cuatro componentes bajo el estudio: compresor, cámara de la combustión, turbina de generación de gas, y turbina de poder. Semejante clasificación sólo está siguiendo la hipótesis acerca de la apariencia inicial de fallas en un componente. Se usa en el diagnóstico de turbina de gas cuando a la información para describir fallas específicas del componente es escasa.
Variación C esta basado en la suposición que las fallas pueden ocurrir simultáneamente en dos componentes. Cada clase de falla múltiple es obtenida por la variación independiente de cuatro parámetros (dos parámetros por cada componente). El número total de clases (seis) incluye todo las posibles combinaciones de componentes en clases.
Variación A se usa por evaluar la clasificación bajo todas las condiciones estacionarias y en la mayoría de los cálculos bajo las condiciones dinámicas. Variaciones A1, B, y C sólo son empleado bajo las condiciones dinámicas en cálculos comparativos en Sección 5.5 por analizar el efecto de cambio en el tipo de la clase.
La estructura de las variaciones antedichas se describe a fondo en Apéndice II. Cada variación de la clasificación es presentada por su muestra de referencia y muestra de prueba. Estas muestras sirven para el entrenamiento y comprobación de la red neuronal correspondiente.
5.2.3. Redes Neuronales
Estudios /11,14/ describen los resultados generales de entrenamiento y prueba redes neuronales cuando se aplica a problemas de diagnóstico de la turbina industrial de gas que se

7
analiza en regímenes estacionarios y dinámicos. Por lo tanto esta sección se da una descripción breve de las redes utilizadas y un poco de sus peculiaridades en esta investigación.
Un perceptron multi-capa que contiene una capa oculta y funciones de activación de sigmoidales se seleccionó para diagnosticar la turbina de gas. Las muestras mencionadas Zr y Wr se usaron como fuentes de datos por entrenar el perceptron. El proceso de entrenamiento se dirigió a utilizar el algoritmo de retropropagacion, demostrado tener convergencia rápida y estabilidad /14/.
La dimensionalidad de los vectores *→Z y
→*W determina el número de nodos en la capa de
la entrada de la red. La cantidad de neuronas de la capa de salida es igual al número de clases analizadas según la variación seleccionada de la clasificación. Durante entrenamiento, el valor de la variable de salida que corresponde al número de la clase conocida se toma igual a uno, mientras las otras variables son iguales a cero. El número óptimo de neuronas de capa oculta, determinó separadamente para condiciones estacionarias y dinámicas /ver 11,14/, es constante en todos los cálculos.
5.2.4. Criterio para la Efectividad del Diagnóstico
La red neuronal en el proceso de entrenamiento usa el error-medio-cuadrado e entre los valores de salida y los actuales. En el modo del lote el error e se calcula para todos los patrones que participan en el entrenamiento. La meta del entrenamiento es minimizar error en función de los pesos desconocidos de conexión de la red. La calidad de la red es determinada por el error mínimo logrado. Sin embargo, el error mínimo obtenido en los patrones de entrenamiento no refleja directamente la efectividad del diagnóstico por la red entrenada. Se tiene que escoger otros patrones diferentes de los utilizados en el entrenamiento para saber la efectividad con la probabilidad de un diagnóstico correcto.
Cálculo de esta probabilidad involucra muestras nuevas Zt o Wt (muestras de prueba). Estas se forman en modo igual que las muestras de referencia pero con semillas diferentes de los generadores de números aleatorios. Usando muestra prueba, los índices de autenticidad son
determinados separadamente para cada clase y para toda la clasificación. Para cada patrón →
*Z (o →
*W ) de la muestra de prueba, la red elabora un diagnóstico correspondiente. Si el diagnóstico coincide con la clase de la falla conocida a priori, es clasificado como correcto. Para calcular la probabilidad de diagnóstico correcto jP , el número total de diagnosis correctas para una clase
jD se divide por el número total de patrones en esa clase. Tales probabilidades computadas para
todas las clases forman un vector →
P de probabilidades de diagnóstico correcto. Un escalar P es
después determinado como un valor promedio de elementos del vector →
P . Los elementos del
vector →
P son índices de distinción de cada clase, mientras el escalar P constituye el índice de exactitud de diagnóstico de toda la maquina teniendo en cuenta su sistema de medición y la clasificación de fallas aceptada.
5.2.5. Concepto de la clasificación universal.
Como indicamos previamente en la introducción, reconocimiento de fallas en una turbina
de gas normalmente tiene lugar bajo condiciones de operación →
U fijas. Un cambio en condiciones llevará a reconstruir la clasificación de la fallas porque en general la clasificación depende de las condiciones.
La influencia de las condiciones de operación en la clasificación basada en un modelo es aproximadamente determinada por su impacto en la matriz de influencia H. Para la turbina industrial de gas bajo el estudio este impacto resultó ser moderado. Para demostrar esto, matriz H se calculó para ocho puntos estacionarios de operación simulados por una disminución uniforme

8
en el consumo de combustible en rango de 100 a 50 por ciento del valor máximo bajo las condiciones ambientales estándares. Fig. 1 muestras la conducta de los elementos de la matriz, empleada para construir clases. Es evidente que todos los elementos dependen ligeramente de los modos estacionarios.
Esta peculiaridad formula la idea para formar y usar una clasificación universal la cual se construye con los siguientes principios: en el espacio de las desviaciones cada clase se forma de los patrones (puntos o trayectorias) que pertenecen a varias condiciones de operación. Después, la clasificación se usa para hacer un diagnóstico bajo cualquier condición de operación. Como resultado, empleando tal clasificación, el método de diagnóstico también se hace universal.
La manera alternativa de simplificar el proceso de diagnóstico podría ser construir la clasificación a una condición operación fija y aplicarla a las diferentes condiciones. Sin embargo, como mostraremos abajo, tal clasificación no realiza muy bien el diagnóstico.
Debido a alguna influencia residual de las condiciones de operación a la descripción de fallas, la unión de los patrones de diferentes condiciones en una clase producirá una "difusión" de patrones qué provocará una intersección más alta entre las clases y por lo tanto una disminución en confiabilidad. ¿Cuál es la magnitud de este impacto negativo? El apropiado uso de clasificación universal en práctica es gobernado por la respuesta a esta pregunta.
Fig. 1: Coeficientes de influencia contra puntos estacionarios de operación
(Los coeficientes corresponden a las mediciones de temperatura de la turbina libre y los factores de corrección empleados en la variación A de la clasificación)
La valoración de la disminución en confiabilidad cuando cambio a la clasificación
universal se llevó como sigue. Primero, nosotros escogimos varios modos estacionarios o dinámicos con diferentes condiciones de operación. Para cada modo se forma su clasificación "convencional". Usando la muestra de prueba, nosotros calculamos las probabilidades del diagnóstico correcto (por clase y para la clasificación en conjunto) para cada modo. Después
9
computamos probabilidad promedia para todos modos. Después la clasificación universal se construye para los mismos modos seleccionados, se aplica sucesivamente a cada modo, se calculan probabilidades del diagnóstico correcto y se computa valor promedio. Las diferencias entre las probabilidades promedias para la clasificación convencional y para la universal indicarán el efecto negativo del cambio a la clasificación universal.
La clasificación universal se analiza abajo en aplicación para los modos estacionarios y transitorios seleccionados y su aplicación a cualquier otra condición de operación se explica. Nosotros primero explicamos el caso menos sofisticado de diagnóstico, caso de los regímenes estacionarios.
5.3. Clasificación universal de fallas en estados estacionarios (Meta 2)
Para evaluar la clasificación universal, nosotros seleccionamos modos estacionarios
puestos por valores de consumo de combustible diferentes. Éstos son los mismos ocho modos usados en Sección 5.3 para evaluar comportamiento de la matriz de influencia.
Otras condiciones para los cálculos según las recomendaciones de /14/ eran siguientes: - El número de patrones por clase para las muestras de referencia y prueba es 1000. - El número de variables medidas iguala 7; su nomenclatura se muestra en tabla A1. - La variación A que incluye 8 clases se usa (vea Apéndice II). - El número de nodos en la capa oculta es 12. - El número de ciclos de entrenamiento es 200.
De lo anterior está claro que la estructura del perceptron empleado puede escribirse como "7-12-8", y muestras Zr y Zt incluyen 1000×8=8000 elementos cada una.
Una aproximación descrita para evaluar confiabilidad del diagnóstico permite una rigurosa valoración cuantitativa de la clasificación universal en los ocho modos seleccionados. En la Tabla 1 se muestran las probabilidades de un diagnóstico correcto para los dos enfoques, tradicional y nuevo.
Las primeras ocho filas incluyen los resultados del enfoque convencional aplicado
sucesivamente a cada modo estacionario. Aquí y en las tablas debajo de, la fila "Mean" da resultados promedios para ocho modos. La fila "UC" muestra las probabilidades del diagnóstico correcto que usa la clasificación universal en promedio para todos modos. Por último, la fila "Diff" incluye la diferencia entre las probabilidades promedias de dos enfoques. El análisis de la tabla muestra que (1) las probabilidades de un diagnóstico correcto separado por clase y por clasificación en conjunto cambian ligeramente del modo a modo, y (2) las probabilidades de un reconocimiento correcto permanecen inalteradas por la clasificación universal. Su efecto total ha resultado ser ligeramente positivo en lugar de negativo como esperamos a priori. En el promedio, confiabilidad incremento por 0.11% (crecimiento de probabilidad .0011 relativamente del nivel 0.8364 de la clasificación convencional) que puede ser explicado por la naturaleza aleatoria de las probabilidades derivados de las pruebas estadísticas.
Aunque la clasificación universal no tiene pérdidas de confiabilidad adicionales a los modos que donde la clasificación fue formada, también es importante saber su conducta a los modos diferentes. Para estimar confiabilidad de tal diagnóstico, se usaron los mismos ocho estados estacionarios de Tabla 1. Uno de ellos era escogido para la comprobación, mientras los otros eran empleados para la referencia. Se repitieron los cálculos según este nuevo esquema para cada modo usándolo para la comprobación. La probabilidad media de diagnóstico correcto era 0.8310. Esto significa la pérdida de confiabilidad de 0.54% la cual se considera como insignificativa.
La idea para construir la clasificación convencional para un modo de operación específico y aplicarla para otros modos también fue verificada. La red neuronal estaba consecutivamente

10
especializada en cada modo de tabla 1 y probó cada vez en absoluto los modos. El promedio nivel de confiabilidad en este caso había reducido por 0.6%. Esto significa que la clasificación general que excede la clasificación convencional a los estados estacionarios de entrenamiento, bueno comparado a estos con los nuevos estados estacionarios.
Para trazar conclusiones finales acerca de la clasificación propuesta, el análisis que incluye sólo variación del caudal de combustible en los regímenes estacionarios no es suficiente. Considerado las ventajas potenciales y la complejidad alta del diagnóstico de turbinas de gas en las condiciones estáticas, nosotros llevamos a cabo una valoración más versátil y completa de la clasificación universal para el caso de regímenes transitorios.
5.4. Valoración de la clasificación universal para regímenes transitorios (Meta 4)
5.4.1. Condiciones generales para el análisis Como en el caso anterior de regímenes estacionarios, nosotros empezaremos la valoración
de la clasificación universal evaluando el impacto de las variaciones del caudal de combustible establecido como una variable de control. En este caso, sin embargo, no el valor de la variable se cambia sino su perfil en tiempo. Se seleccionaron cuatro aceleraciones y cuatro desaceleraciones para el análisis. Todos ellos fueron especificados por el perfil de Gf (vea Apéndice III) bajo las condiciones atmosféricas estándar. Nosotros consideraremos a estos ocho procesos transitorios como básicos, ya que la mayoría de los cálculos se realiza para ellos.
Las condiciones de los cálculos corresponden en general a las descritas en la Sección 5.3. La diferencia es que el vector generalizado comprende 98 elementos ahora los cuales consisten un patrón para reconocer y un elemento de la clasificación. Una expansión sustancial de la capa de la entrada de la red neuronal dio lugar a un aumento en el número de nodos a la capa oculta a 25 /11/. Por lo consiguiente, la estructura del perceptrón empleada para las condiciones dinámicas puede escribirse como "98-25-8."
5. 4.2. Efectos de cambios en la variable de control
La Figure 2 ayuda analizar el impacto de variaciones en la variable de control en la presentación de las clases y la posibilidad de introducir la clasificación universal para el diagnóstico bajo las condiciones transitorias. Esta figura muestra las trayectorias para ocho regímenes transitorias y ocho clases mencionadas 821 ,...,, DDD en el espacio tridimensional de las desviaciones. Puede verse que los puntos de trayectoria son agrupados por clase en lugar de régimen, y que las clases son distinguibles.

11
Fig. 2: Representación de las clases en espacio de las desviaciones en diferentes procesos
transitorios (Máxima severidad de fallas, sin errores de medición)
Nosotros caracterizaremos cuantitativamente la clasificación universal propuesta como lo hicimos en Sección 5.3. Para una comparación más fácil, los nuevos resultados se muestran en Tabla 2 en la misma forma como en Tabla 1. Aquí y en otra parte en este papel "Accel" se refiere a la aceleración de la turbina de gas y "Decel" a la desaceleración.
Los datos de la Tabla 2 revelan que probabilidades P varían de 0.8414 a 0.8945 entre los regímenes, es decir más considerablemente que en el caso de la operación estacionaria.
Se relacionan estos cambios en confiabilidad más al cambio del perfil (vea Tabla 4A) que al tipo del proceso transitorio (aceleración o desaceleración). El nivel total de confiabilidad ha aumentado considerablemente comparando con los resultados mostrados en Tabla 1.
Respecto al problema primario, es decir el efecto de cambiar a la clasificación universal, este ha llegado a ser más notable: la probabilidad de un diagnóstico correcto disminuida por 0.002-0.063 por clase y por 0.028 (2.82%) en promedio.
Como en el caso de estados estacionarios, es de interés práctico saber la confiabilidad del diagnóstico en regímenes transitorios que no se usan para formar la clasificación universal. Para eso se realizaron los cómputos correspondientes que involucraron a todos los regímenes transitorios de la Tabla 2 según la secuencia descrita al final de Sección 5.3. Fue encontrada una pérdida promedia de confiabilidad para la clasificación universal de 4.40%, mientras la clasificación basada en un estado transitorio tenía la pérdida de 15.11%. Como puede verse, una aplicación de la clasificación universal a los nuevos estados transitorios induce una pérdida adicional de 1.58%=4.40%-2.82% que pueden ser considerados como aceptable. La clasificación convencional es bastante inutilizable en este caso.
El hecho que la introducción de la clasificación universal ha demostrado más problemático para la dinámica ha llevado más allá a un examen más completo en transitorios. En lo que sigue,

12
nosotros analizamos el impacto de las variaciones en condiciones de operación introducidas por separado y el efecto acumulativo de estas variaciones.
5.4.3. Variaciones en las condiciones de operación
E esta sección, el principio propuesto por formar la clasificación se pone a la prueba que usa un experimento factorial completo. Los cuatro factores que se varían independientemente son el perfil de consumo de combustible, el tipo de proceso transitorio, la temperatura TH y presión PH del aire ambiental. El primero de estos factores tiene cuatro valores diferentes y el resto tiene dos valores cada uno. La variación independiente de los factores produce 32 puntos de operación del plan de experimento y 32 regímenes transitorios correspondientes para ser analizados.
Para cada uno de estos transitorios la clasificación convencional es formada y la probabilidad de un diagnóstico correcto P se computa. Tabla 3 define los puntos del plan y da probabilidades por los estados transitorios correspondientes. Los datos de la tabla indican que las probabilidades P cubran el rango (0.8403-0.8981) que sólo está 1.088 veces más ancho que el rango correspondiente para 8 regímenes de la Tabla 2. Por consiguiente, inclusión de la temperatura TH y presión PH en la lista de los factores variados y aumentando del número de regímenes transitorios de 8 a 32 efecto muy poco a la dispersión de índices de confiabilidad. Como antes, la variable del control tenía un impacto más grande.
Por supuesto, para evaluar la propiedad de la clasificación propuesta es importante evaluar la pérdida total probable de confiabilidad mientras se varían todas las condiciones de operación. Para evaluarlo, nosotros calculamos que la probabilidad promedia P a para los 32 transitorios de Tabla 3 y nos da como resultado 0.8730. La misma probabilidad para la clasificación universal utilizada a los mismos regímenes es 0.8428. Eso quiere decir que la pérdida de confiabilidad puede estimarse como ∆ P = -0.0302.
Tabla 1. Confiabilidad del diagnóstico en regímenes estacionarios
→
P Regímenes estacionarios
d1 D2 d3 d4 d5 d6 d7 d8
P
1 0.857 0.805 0.893 0.727 0.892 0.871 0.900 0.884 0.85362 0.848 0.751 0.881 0.730 0.900 0.840 0.881 0.836 0.83343 0.828 0.760 0.887 0.733 0.889 0.841 0.861 0.820 0.82744 0.861 0.762 0.882 0.732 0.910 0.853 0.882 0.792 0.83425 0.855 0.741 0.895 0.732 0.896 0.849 0.886 0.833 0.83596 0.874 0.759 0.895 0.732 0.898 0.842 0.878 0.816 0.83677 0.862 0.747 0.902 0.713 0.914 0.842 0.878 0.828 0.83578 0.869 0.750 0.907 0.710 0.907 0.829 0.884 0.818 0.8342
En total 8 regímenes estacionarios Mean 0.857 0.759 0.893 0.726 0.901 0.846 0.881 0.828 0.8364UC 0.849 0.746 0.889 0.737 0.912 0.837 0.894 0.836 0.8375Diff -0.008 -0.013 -0.004 0.011 0.011 -0.009 0.013 0.008 0.0011
Tabla 2. Diagnóstico en regímenes transitorios
→
P Tipo de régimen
transitorio
Numero de perfil d1 d2 d3 d4 d5 d6 d7 d8
P
1 0.923 0.792 0.924 0773 0.902 0.911 0.899 0.902 0.8782 2 0.902 0.782 0.923 0.782 0.906 0.892 0.908 0.873 0.8710 3 0.848 0.769 0.921 0.748 0.897 0.882 0.897 0.799 0.8451
Accel
4 0.925 0.838 0.931 0.831 0.905 0.911 0.904 0.911 0.8945 1 0.905 0.802 0.930 0.835 0.901 0.892 0.909 0.912 0.8855 2 0.895 0.811 0.912 0.825 0.894 0.892 0.923 0.916 0.8835
Decel
3 0.834 0.768 0.907 0.744 0.906 0.867 0.895 0.810 0.8414
13
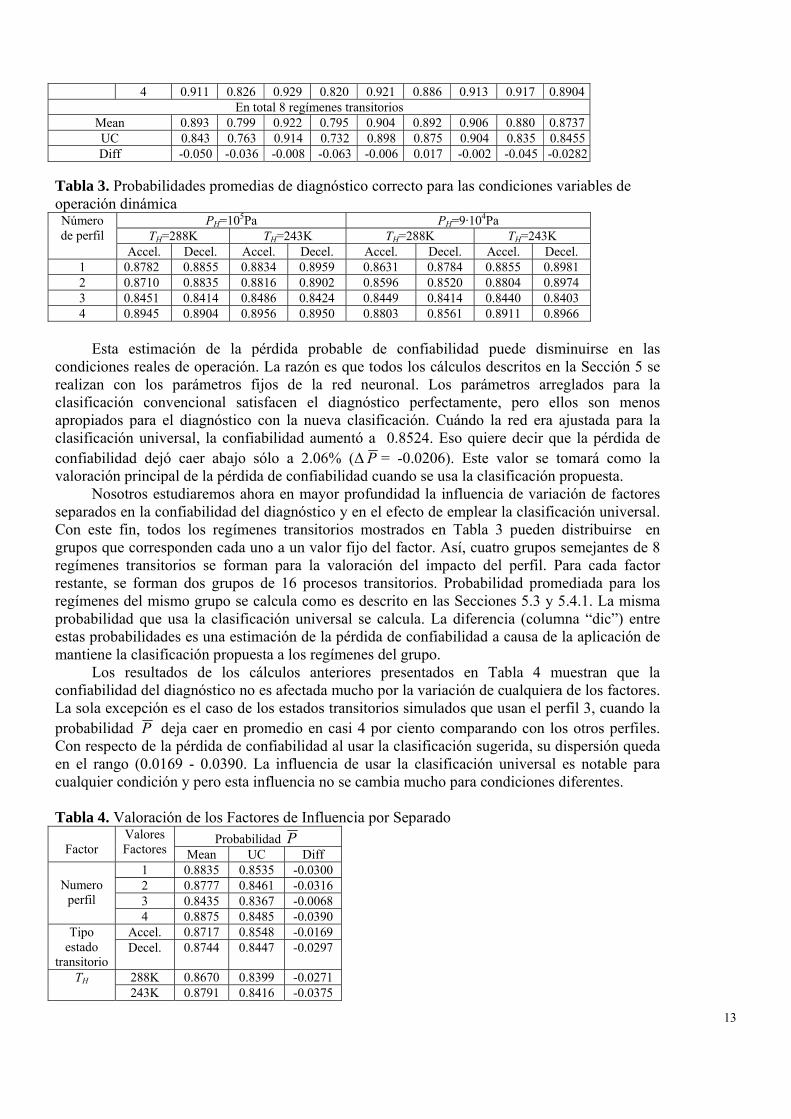
4 0.911 0.826 0.929 0.820 0.921 0.886 0.913 0.917 0.8904 En total 8 regímenes transitorios
Mean 0.893 0.799 0.922 0.795 0.904 0.892 0.906 0.880 0.8737 UC 0.843 0.763 0.914 0.732 0.898 0.875 0.904 0.835 0.8455 Diff -0.050 -0.036 -0.008 -0.063 -0.006 0.017 -0.002 -0.045 -0.0282
Tabla 3. Probabilidades promedias de diagnóstico correcto para las condiciones variables de operación dinámica
PH=105Pa PH=9·104Pa TH=288K TH=243K TH=288K TH=243K
Número de perfil
Accel. Decel. Accel. Decel. Accel. Decel. Accel. Decel. 1 0.8782 0.8855 0.8834 0.8959 0.8631 0.8784 0.8855 0.8981 2 0.8710 0.8835 0.8816 0.8902 0.8596 0.8520 0.8804 0.8974 3 0.8451 0.8414 0.8486 0.8424 0.8449 0.8414 0.8440 0.8403 4 0.8945 0.8904 0.8956 0.8950 0.8803 0.8561 0.8911 0.8966
Esta estimación de la pérdida probable de confiabilidad puede disminuirse en las
condiciones reales de operación. La razón es que todos los cálculos descritos en la Sección 5 se realizan con los parámetros fijos de la red neuronal. Los parámetros arreglados para la clasificación convencional satisfacen el diagnóstico perfectamente, pero ellos son menos apropiados para el diagnóstico con la nueva clasificación. Cuándo la red era ajustada para la clasificación universal, la confiabilidad aumentó a 0.8524. Eso quiere decir que la pérdida de confiabilidad dejó caer abajo sólo a 2.06% (∆ P = -0.0206). Este valor se tomará como la valoración principal de la pérdida de confiabilidad cuando se usa la clasificación propuesta.
Nosotros estudiaremos ahora en mayor profundidad la influencia de variación de factores separados en la confiabilidad del diagnóstico y en el efecto de emplear la clasificación universal. Con este fin, todos los regímenes transitorios mostrados en Tabla 3 pueden distribuirse en grupos que corresponden cada uno a un valor fijo del factor. Así, cuatro grupos semejantes de 8 regímenes transitorios se forman para la valoración del impacto del perfil. Para cada factor restante, se forman dos grupos de 16 procesos transitorios. Probabilidad promediada para los regímenes del mismo grupo se calcula como es descrito en las Secciones 5.3 y 5.4.1. La misma probabilidad que usa la clasificación universal se calcula. La diferencia (columna “dic”) entre estas probabilidades es una estimación de la pérdida de confiabilidad a causa de la aplicación de mantiene la clasificación propuesta a los regímenes del grupo.
Los resultados de los cálculos anteriores presentados en Tabla 4 muestran que la confiabilidad del diagnóstico no es afectada mucho por la variación de cualquiera de los factores. La sola excepción es el caso de los estados transitorios simulados que usan el perfil 3, cuando la probabilidad P deja caer en promedio en casi 4 por ciento comparando con los otros perfiles. Con respecto de la pérdida de confiabilidad al usar la clasificación sugerida, su dispersión queda en el rango (0.0169 - 0.0390. La influencia de usar la clasificación universal es notable para cualquier condición y pero esta influencia no se cambia mucho para condiciones diferentes.
Tabla 4. Valoración de los Factores de Influencia por Separado
Probabilidad P Factor
Valores Factores Mean UC Diff
1 0.8835 0.8535 -0.0300 2 0.8777 0.8461 -0.0316 3 0.8435 0.8367 -0.0068
Numero
perfil 4 0.8875 0.8485 -0.0390
Accel. 0.8717 0.8548 -0.0169 Tipo estado
transitorio Decel. 0.8744 0.8447 -0.0297
288K 0.8670 0.8399 -0.0271 TH 243K 0.8791 0.8416 -0.0375

14
105Pa 0.8764 0.8404 -0.0360 PH 9·104Pa 0.8697 0.8406 -0.0291
Es interesante averiguar la tendencia de confiabilidad a cambiar cuando el número de
factores variables y el número total de regímenes transitorios se aumentan gradualmente. Para este propósito, nosotros analizamos un proceso transitorio primero bajo las condiciones operación fijas, después cuatro procesos determinados por el cambio en el perfil, seguido por ocho procesos determinados por los cambios independientes del tipo y el perfil del proceso dinámico, y así sucesivamente hasta 32 procesos. Para cada uno de los casos descritos en Tabla 5 el índice P se calculó usando la clasificación universal. Su disminución ∆P relativamente el caso de un sólo régimen transitorio también fue calculada. La conducta de los valores ∆P muestran que cuando el número de factores analizados y los procesos dinámicos crecen, el aumento en la pérdida de confiabilidad es lento y termina completamente en la última columna de la tabla. Nosotros podemos esperar las pérdidas que están dentro del nivel del dos por ciento previamente calculado así cuando la clasificación universal se actualiza para incluir a los nuevos regímenes transitorios. Sección 5.7 mostrará que las pérdidas pueden ser aun más pequeñas en un mantenimiento real.
Así, el método propuesto para formar la clasificación se examinó bajo la variación de condiciones ambientales y con variaciones diferentes en la selección de la variable de control. Sin embargo, actualmente los programas de las turbinas de gas son complejos y variables de control puede ser diferentes en cada nueva fase del programa. Por esta razón, después de haber probado la clasificación universal en estados transitorios determinado por el perfil de consumo de combustible, es deseable probarlo con otras variables del control.
Tabla 5. Influencia de la adicción de regímenes transitorios en exactitud del diagnóstico
con la clasificación universal Factores de variación
Valores usados
Numero de perfil 1 1, 2, 3, 4 1, 2, 3, 4 1, 2, 3, 4 1, 2, 3, 4 Tipos de regimens
transitorios
Accel. Accel. Accel., Decel. Accel., Decel. Accel., Decel.
TH 288 288 288 288, 243 288, 243 PH 105Pa 105Pa 105Pa 105Pa 105Pa, 9·104Pa
Cantidad de regímenes transitorios 1 4 8 16 32
Probabilidades UCP 0.8782 0.8583 0.8455 0.8404 0.8428
∆P 0.0 -0.0199 -0.0327 -0.0378 -0.0354
5.4.4. Influencia del reemplazo de la variable de control Ya que la matriz de influencia y la descripción de clases generalmente dependen de la
selección de la variable de control, hay que aclarar las dudas acerca de la imposibilidad de usar la clasificación universal cuando el consumo de combustible se sustituye con otra variable. Para quitar todas las dudas se analizaron dos variables de control adicionales: velocidad de rotación de generador gas ng y velocidad de rotación de la libre nft, ambos ampliamente usados en los programas de control.
Para las nuevas variables, se hicieron los cálculos de confiabilidad del diagnóstico similares a los de la Sección 5.4.2 para ocho estados transitorios separados y usando las clasificaciones convencional y universal. Los resultados en todas las tres variables de control se acumulan en la Tabla 6. El análisis de los datos de la tabla demuestran que la distribución de las probabilidades sobre los procesos transitorios depende de la variable de control seleccionada, mientras las pérdidas promedias de confiabilidad (línea "Diff") para las nuevas variables caen

15
casi en dos veces (de 2.82% a 1.37% y 1.84%). Basándose en este resultado es razonable asumir que en el caso de un actual programa de control las pérdidas se quedarán debajo del nivel definido en la sección anterior.
Tabla 6. Probabilidades de Diagnóstico Correcto P con Diferentes Variables de Control
Variable de control Tipo régimen
transitorio
Numero deperfil Gf ng nft
1 0.8782 0.8671 0.8530 2 0.8710 0.8640 0.8290 3 0.8451 0.8808 0.8264
Accel.
4 0.8945 0.8634 0.8216 1 0.8855 0.8668 0.8604 2 0.8835 0.8722 0.8238 3 0.8414 0.8841 0.8435
Decel.
4 0.8904 0.8635 0.8221 En total ocho regímenes transitorios Mean 0.8737 0.8702 0.8350 UC 0.8455 0.8565 0.8166 Diff -0.0282 -0.0137 -0.0184
Puesto que este artículo estudia una nueva manera de formar la clasificación de fallas en la
turbina gas, es importante ponerla a prueba con varios tipos y cantidades de clases.
5.4.5. Influencia de la cantidad y tipo de clases Consideramos las variaciones de clasificación A1, B, y C descritas en la Sección 5.2.2.
Todas estas variaciones emplean los mismos factores de corrección por simular fallas como es determinado en la Tabla A3. La manera de formar clases, así como su cantidad en la clasificación, son únicas para cada variación.
Para cada variación, la confiabilidad del diagnóstico se estimó para ocho regímenes transitorios básicos como se hizo en Sección 5.4.2 para la Variación A. Tabla 7 incluye los resultados de los cálculos siguiendo el formato de la Tabla 6. Las probabilidades de la Tabla 7 muestran que para las variaciones B y C hay un aumento menor en pérdidas al cambiar a la clasificación universal. Sin embargo, las pérdidas resultaron ser proporcionales al aumento total en confiabilidad por estas variaciones. Por lo tanto podemos concluir que las pérdidas relativas permanecen constantes.
Tabla 7. Probabilidades de diagnóstico correcto para diferentes variaciones en la Clasificación
Variación de clasificación (numero de clases)
Tipo de regimen
transitorio
Numero de
perfil A1 (8 clases)
B (4 clases)
C (6 clases)
1 0.8775 0.9427 0.9232 2 0.8620 0.9275 0.9205 3 0.8411 0.9008 0.8958
Accel.
4 0.8921 0.9512 0.9355 1 0.8811 0.9450 0.9478 2 0.8831 0.9420 0.9430 3 0.8408 0.8970 0.8790
Decel.
4 0.8868 0.9472 0.9377 Para ocho regímenes
Mean 0.8706 0.9317 0.9228 UC 0.8429 0.9023 0.8937 Diff -0.0277 -0.0294 -0.0291

16
Después de hacer examen detallado de la clasificación universal para el diagnóstico en los
regímenes transitorios es seguro asumir que existen pérdidas de confiabilidad en todos casos considerados pero ellas estaban limitadas y pueden ser consideradas aceptables.
5.4.6. Discusión de resultados
Secciones 5.3 y 5.4 examinaron una turbina de gas con la clasificación universal de fallas
por medio de la simulación estadística del proceso de diagnóstico en las condiciones estáticas y dinámicas. Usando las probabilidades de un diagnóstico correcto calculadas sobre el curso de la simulación, la clasificación propuesta demostró no tener efecto adverso en los regímenes estacionarios.
Se puso particular énfasis en el diagnóstico bajo variando condiciones en los rtegímenes transitorios. Un experimento factorial completo se realizó en la investigación. Cuatro factores más importantes fueron variados independientemente: perfil de variable de control, tipo de proceso dinámico (aceleración o desaceleración), temperatura del medio ambiente, y presión del medio ambiente. Esto ayudó determinar el impacto de las variaciones de cada factor en la confiabilidad del diagnóstico cuando la clasificación universal se usa. La pérdida probable total de confiabilidad fue encontrar un valor que no excediera el dos por ciento.
Estas conclusiones se obtuvieron a través de la simulación y pueden ponerse en práctica considerando un par de observaciones.
Primero. Los puntos de operación del experimento factorial completo se localizan bastante lejos unos de otros y forman un hiper-paralelepípedo de volumen grande. Sin embargo, la mayoría de los puntos de operación reales de turbinas de gas estacionarias forman regiones mucho más compactas en el espacio de las condiciones de operación. Ahora, en condiciones reales dejarán caer y producirán menos pérdidas de confiabilidad del diagnóstico comparando con el nivel del dos-por ciento logrado.
Segundo. Cálculos con tres las variables de control diferentes mostraron que el cambio del caudal de combustible por otras variables mejora las condiciones por usar la clasificación sugerida. Esto es por qué cuando los programas de control reales están en uso, las pérdidas reales de confiabilidad pueden demostrar ser más bajas que aquéllas estimadas a través de la simulación.
Tercero. Una comparación de los resultados para tres diferentes variaciones de la clasificación mostró que las pérdidas de confiabilidad son proporcionales al nivel de confiabilidad del diagnóstico para cada variación. Es decir las pérdidas relativas a causa de la introducción de la clasificación universal son constantes para los diferentes tipos de clases simuladas. Por consiguiente, sería razonable asumir que para cada nueva variación de la clasificación las pérdidas en práctica no son probables aumentar.
Con lo explicado anteriormente, que involucra la aplicación práctica de los resultados derivados de la simulación dinámica del proceso de diagnóstico, también puede emplearse para las condiciones estacionarias en vista de las consideraciones siguientes. Con lo señalado al principio, en los modos estacionarios la aplicación de la clasificación propueswta es más adecuada. Además, los primeros puntos de la trayectoria transitoria representan una operación estacionaria.
Así, se ha demostrado la viabilidad del principio de la clasificación universal para casos específicos de condición operación, variable de control, y clasificación de falla. ¿Significa que la clasificación universal será válida para los nuevos casos de funcionamiento futuro? Como puede verse de Fig.1, la conducta de coeficientes de influencia es bastante monótona. Esto significa que la descripción de la clase cambia ligeramente bajo las nuevas condiciones operación y el principio de clasificación universal puede aplicarse. Además, el análisis realizado en las Secciones 5.3 y 5.4 ha confirmado que la clasificación universal puede realizar diagnóstico con éxito a los estados estacionarios y transitorios que no se usaron en formación de la clasificación.
17
VI. RESULTADOS FINALES
Nosotros hemos investigado la posibilidad de crear la clasificación universal de fallas de
turbina de gas para diagnosticar bajo las condiciones variables de operación. La clasificación propuesta se probó en los regímenes estacionarios y transitorios con variar de todos los factores principales que afectan desempeño de la clasificación. El examen se realizó por medio de la simulación estadística del proceso de diagnóstico que usa a los modelos termodinámicos no-lineales para la simulación de fallas y las redes neuronales para su reconocimiento. Se usó la probabilidad de un diagnóstico correcto, uno de los indicadores mayores de la efectividad de diagnóstico, como un criterio de perfección.
Ninguno de los numerosos casos considerados encontró obstáculos a aplicar la clasificación universal. Ninguna pérdida de confiabilidad que usó la clasificación sugerida bajo las condiciones operación estacionaria se descubrió. Bajo las condiciones dinámicas la estimación obtenida de la posible pérdida de confiabilidad fue encontrada para ser sólo dos por ciento. La viabilidad de tocar en la práctica los resultados de la simulación matemática fue analizada. Es demostrado que las pérdidas de confiabilidad bajo las condiciones reales pueden ser minores que las pérdidas obtenida por la simulación.
Nuestros resultados nos permiten considerar que los estudios realizados son suficientes para los propósitos de aplicación práctica de la clasificación universal en sistemas reales de monitoreo y diagnóstico. Reconocidamente, el anterior es sólo aplicable a la unidad de turbina de gas analizada. Otros tipos de turbina de gas requieren estudios adicionales.
VII. IMPACTO
Impacto del proyecto realizado consiste en un mejoramiento general de los sistemas
automatizados del diagnóstico de las turbinas de gas por la simplificación drástica de los algoritmos la cual permite su realización en sistema reales de diagnóstico en los regímenes estacionarios y transitorios. Además, las recomendaciones sobre ajuste óptimo de los algoritmos diagnósticos simplificarán la integración de estos a sistemas automatizados tanto existentes como diseñados y el uso efectivo de los algoritmos.
REFERENCIAS
1. Boyce, Meherwan P., 1995. Gas Turbine Engineering Handbook, Gulf Publishing Company,
605p. 2. Rao, B.K.N., 1996, Handbook of Condition Monitoring, Elsevier Advanced Technology,
Oxford. 3. A. P. Tarabrin, V. A. Schurovsky, A. I. Bodrov, J. –P. Stalder, 1998, “An analysis of axial
compressor fouling and a blade cleaning method”, Transactions of ASME, Journal of Turbomachinery, April 1998, Vol. 120, pp. 256 – 261.
4. H. I. H. Saravanamuttoo, B. D. MacIsaac, Thermodynamic models for pipeline gas turbine diagnostics. ASME Journal of Engineering for Power, Vol. 105, pp.875-884 ASME Paper No.83-GT-235.
5. Ogaji, S.O.T., Li, Y. G., Sampath, S., et al., 2003, “Gas path fault diagnosis of a turbofan engine from transient data using artificial neural networks”, IGTI/ASME Turbo Expo International Technical Congress, Atlanta, Georgia, USA, 10p.
6. Pipe, K., 1987. Application of advanced pattern recognition techniques in machinery failure prognosis for Turbomachinery. In: Proc. Condition Monitoring 1987 Int. Conf., British Hydraulic Research Association, UK, pp.73-89.

18
7. Loboda, I., 2003. Trustworthiness problem of gas turbine parametric diagnosing. In: Proc. Fifth IFAC Symposium on Fault Detection, Supervision and Safety of Technical Process. Washington, D.C., 6p.
8. C. Romesis, K. Mathioudakis. Setting up of a probabilistic neural network for sensor fault detection including operation with component fault. Journal of Engineering for Gas Turbines and Power, July 2003, Volume 125, Issue 3, pp. 634-641.
9. A.J. Volponi, H. DePold, R. Ganguli. The use of Kalman filter and neural network methodologies in gas turbine performance diagnostics: a comparative study. Journal of Engineering for Gas Turbines and Power, October 2003, Volume 125, Issue 4, pp. 917-924.
10. Peter Turney, Michael Halasz. Contextual Normalization Applied to Aircraft Gas Turbine Engine Diagnosis. Journal of Applied Intelligence, 1993, Issue 3, pp. 109-129
11. Loboda I., Yepifanov S., Feldshteyn Y. A generalized fault classification for gas turbine diagnostics on steady states and transients, IGTI/ASME Turbo Expo International Technical Congress, Barcelona, Spain, May 8-11, 2006, 11р. (accepted)
12. Ph. Kamboukos, K. Mathioudakis. Comparison of linear and non-linear gas turbine performance diagnostics. Journal of Engineering for Gas Turbines and Power, 2005, Vol.127, Issue 1, pp.49-56
13. Loboda, I., Yepifanov, S., and Feldshteyn, Y., 2004, “Deviation problem in gas turbine health monitoring”, IASTED International Conference on Power and Energy Systems, Clearwater Beach, Florida, USA, 6p.
14. Loboda I., Nakano Miyatake M., Goryachiy A. et al., 2005, “Gas Turbine Fault Recognition by Artificial Neural Networks”, The Fourth International Congress of Electromechanical Engineering and Systems, National Polytechnic Institute, Mexico City, Mexico, 5p.
APENDICE I. Simulación de las variables del conducto de flujo
La estructura de la simulación de variables, cual corresponde a un sistema regular de medición, y errores máximos de desviaciones Yiσ son dados en Tabla A1. Los datos mostrados fueron obtenidos en caso cuando la variable de control es consumo de combustible.
Tabla A1. Variables de medición del conducto de flujo
№ Variables de medición Yiσ
1 Presión total de compresor 0.015
2 Presión total de la turbina de alta presión 0.015
3 Temperatura total de compresor 0.025
4 Temperatura total de la turbina de alta presión 0.015
5 Temperatura total de la turbina libre 0.020
6 Velocidad de rotación del generador de gas 0.005
7 Velocidad de rotación de la turbina libre 0.005
APPENDIX II. Variaciones de clasificación
La lista de los factores de corrección →Θ usados para formar las clases de fallas en la turbina
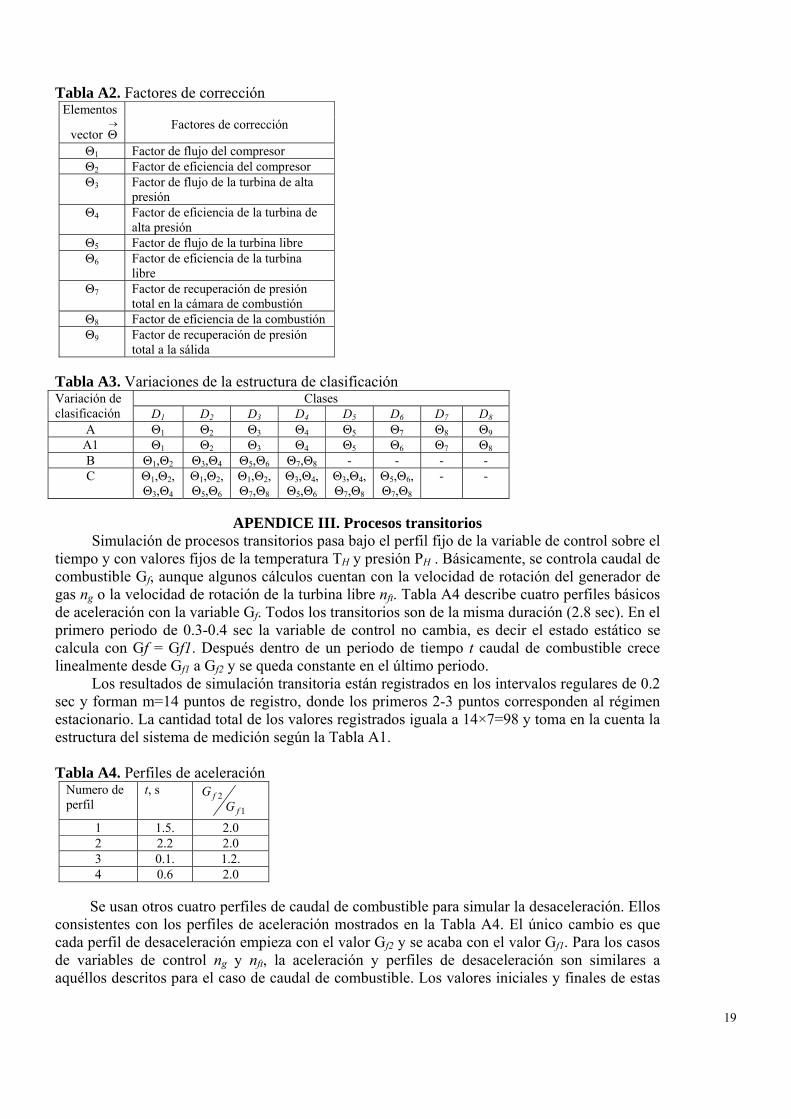
industrial de gas se muestran en la Tabla A2. El diagrama de composición de las clases de por los factores de corrección se da en Tabla A3 para cuatro variaciones de la clasificación. Para la clase dada y variación de la clasificación la celda de la tabla contiene factores de corrección para formar la clase.
19
Tabla A2. Factores de corrección Elementos
vector →Θ
Factores de corrección
Θ1 Factor de flujo del compresor Θ2 Factor de eficiencia del compresor Θ3 Factor de flujo de la turbina de alta
presión Θ4 Factor de eficiencia de la turbina de
alta presión Θ5 Factor de flujo de la turbina libre Θ6 Factor de eficiencia de la turbina
libre Θ7 Factor de recuperación de presión
total en la cámara de combustión Θ8 Factor de eficiencia de la combustión Θ9 Factor de recuperación de presión
total a la sálida Tabla A3. Variaciones de la estructura de clasificación
Clases Variación de clasificación D1 D2 D3 D4 D5 D6 D7 D8
A Θ1 Θ2 Θ3 Θ4 Θ5 Θ7 Θ8 Θ9 A1 Θ1 Θ2 Θ3 Θ4 Θ5 Θ6 Θ7 Θ8 B Θ1,Θ2 Θ3,Θ4 Θ5,Θ6 Θ7,Θ8 - - - - C Θ1,Θ2,
Θ3,Θ4 Θ1,Θ2, Θ5,Θ6
Θ1,Θ2, Θ7,Θ8
Θ3,Θ4, Θ5,Θ6
Θ3,Θ4, Θ7,Θ8
Θ5,Θ6, Θ7,Θ8
- -
APENDICE III. Procesos transitorios
Simulación de procesos transitorios pasa bajo el perfil fijo de la variable de control sobre el tiempo y con valores fijos de la temperatura TH y presión PH . Básicamente, se controla caudal de combustible Gf, aunque algunos cálculos cuentan con la velocidad de rotación del generador de gas ng o la velocidad de rotación de la turbina libre nft. Tabla A4 describe cuatro perfiles básicos de aceleración con la variable Gf. Todos los transitorios son de la misma duración (2.8 sec). En el primero periodo de 0.3-0.4 sec la variable de control no cambia, es decir el estado estático se calcula con Gf = Gf1. Después dentro de un periodo de tiempo t caudal de combustible crece linealmente desde Gf1 a Gf2 y se queda constante en el último periodo.
Los resultados de simulación transitoria están registrados en los intervalos regulares de 0.2 sec y forman m=14 puntos de registro, donde los primeros 2-3 puntos corresponden al régimen estacionario. La cantidad total de los valores registrados iguala a 14×7=98 y toma en la cuenta la estructura del sistema de medición según la Tabla A1.
Tabla A4. Perfiles de aceleración
Numero de perfil
t, s 1
2
f
fG
G
1 1.5. 2.0 2 2.2 2.0 3 0.1. 1.2. 4 0.6 2.0
Se usan otros cuatro perfiles de caudal de combustible para simular la desaceleración. Ellos
consistentes con los perfiles de aceleración mostrados en la Tabla A4. El único cambio es que cada perfil de desaceleración empieza con el valor Gf2 y se acaba con el valor Gf1. Para los casos de variables de control ng y nft, la aceleración y perfiles de desaceleración son similares a aquéllos descritos para el caso de caudal de combustible. Los valores iniciales y finales de estas

20
nuevas variables corresponden a dos regímenes estacionarios dados por valores del caudal de combustible Gf1 y Gf2.