energÍa de deformaciÓn de una estructura
TRANSCRIPT
ENERGÍA DE DEFORMACIÓN DE UNAESTRUCTURA
1. Hipótesis empleadasLas hipótesis que supondremos en este capítulo son:
Material elástico lineal.
Estructura estable
La estructura es cargada lentamente.
La estructura admite superposición.
Asumiremos en una primer etapa del análisis que no hay intercambio de energía térmica, o sea que elproceso es adiabático.
Obsérvese que de acuerdo a lo planteado la estructura puede ser tanto una estructura isostática como unahiperestática.
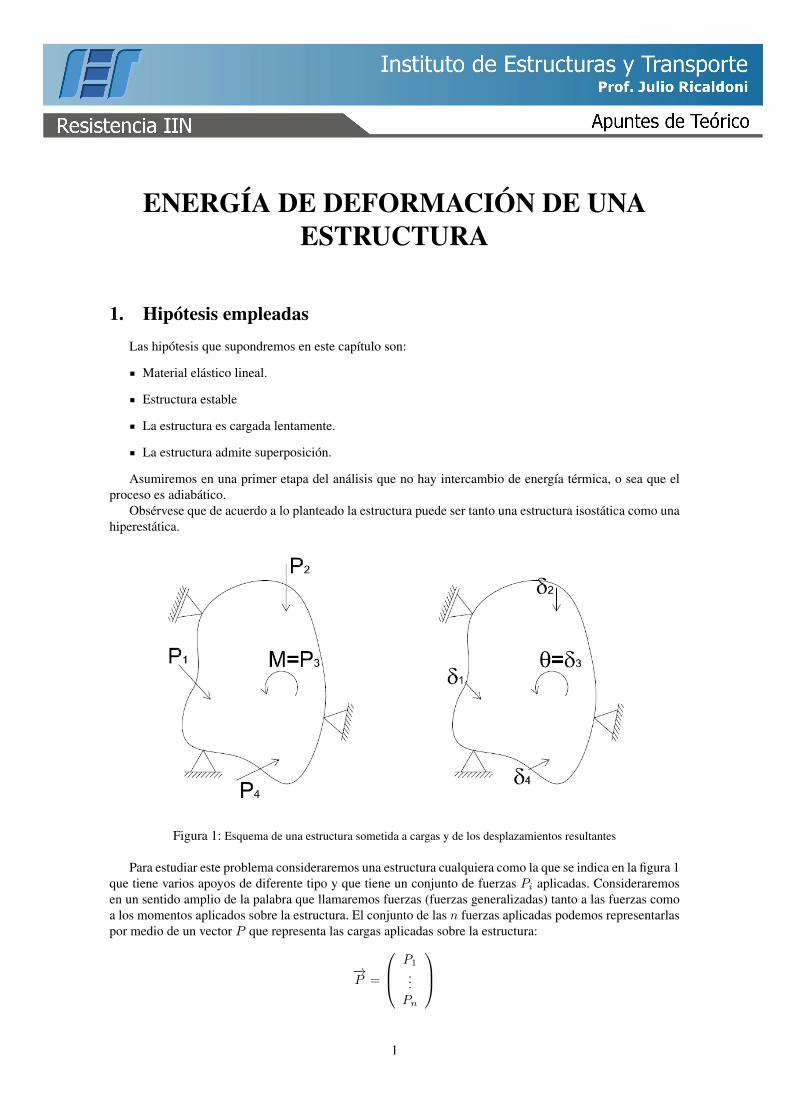
Figura 1: Esquema de una estructura sometida a cargas y de los desplazamientos resultantes
Para estudiar este problema consideraremos una estructura cualquiera como la que se indica en la figura 1que tiene varios apoyos de diferente tipo y que tiene un conjunto de fuerzas Pi aplicadas. Consideraremosen un sentido amplio de la palabra que llamaremos fuerzas (fuerzas generalizadas) tanto a las fuerzas comoa los momentos aplicados sobre la estructura. El conjunto de las n fuerzas aplicadas podemos representarlaspor medio de un vector P que representa las cargas aplicadas sobre la estructura:
−→P =
P1
...Pn
1

Consideraremos ahora los desplazamientos (desplazamientos generalizados) que están asociados a lasfuerzas anteriormente definidas. Estos serán los desplazamientos de los puntos en que están aplicadas lasfuerzas generalizadas (cuando estas son fuerzas propiamente) y los giros de los puntos en que están aplicadaslas fuerzas generalizadas (cuando éstas son momentos). En ambos casos tanto giros como desplazamientos(que consideraremos como desplazamientos generalizados) están orientados en la misma dirección y sentidoque las fuerzas P correspondientes. Los desplazamientos estarán expresados en la unidad de longitudempleada y los giros en radianes. Tomaremos siempre como origen de los desplazamientos la posiciónque tiene la estructura cuando está descargada, es decir que cuando el vector P = 0 los desplazamientosserán nulos. En consecuencia, si llamamos δi al desplazamiento asociado a la fuerza Pi tendremos que losdesplazamientos pueden ser expresados también como un vector que llamaremos δ:
−→δ =
δ1...δn
Puede pensarse que con esta forma de analizar el problema se este perdiendo generalidad pues solo
estamos considerando los desplazamientos de los puntos donde hay fuerzas aplicadas, pero en realidad estono es así, pues si quisiéramos conocer el desplazamiento de un punto cualquiera en cualquier direcciónalcanzaría con agregar ese desplazamiento y una fuerza en ese punto con la misma dirección y tomar lafuerza igual a cero.
2. Flexibilidad y rigidezEn la medida que asumimos linealidad y el principio de superposición tendremos que un desplazamiento
cualquiera δi puede expresarse como una combinación lineal de las cargas Pj .
δi =
n∑j=1
FijPj (1)
Donde Fij sera el desplazamiento δi que se produce como consecuencia de una fuerza aplicada Pj = 1.En forma matricial esa relación se puede expresar de la forma:
−→δ = FP (2)
La matriz F de dimensión n×n es conocida como la matriz de flexibilidad. Esta matriz es independientedel valor de las fuerzas aplicadas y solo depende de la estructura. Puede observarse que de alguna maneraexpresa el criterio intuitivo de flexibilidad, pues cuanto más grande es un término de la matriz F, eldesplazamiento será más grande (para la misma fuerza aplicada).
Es claro suponer que en general las fuerzas P producirán desplazamientos de los puntos de aplicación.No obstante ello existen casos en los que es posible que no existan desplazamientos, como cuando colocamosuna fuerza Pq en un apoyo o colocamos más fuerzas que las necesarias para definir el estado de carga enun punto (en una estructura plana las necesarias serían hasta dos fuerzas no colineales y un giro y en lasestructuras espaciales serían hasta tres fuerzas independientes y tres momentos independientes). En estoscasos podríamos tener desplazamientos nulos en todos los puntos para algún vector de cargas P 6= 0.
Salvo en estos casos donde las cargas están aplicadas en los apoyos o las fuerzas aplicadas en los hechosson nulas, en el resto de los casos la estructura sí se comporta elásticamente (no como un cuerpo rígido)deberá trasmitir esfuerzos y en consecuencia habrá desplazamientos de los puntos de aplicación de lasfuerzas.
Evitando las situaciones particulares anteriormente planteadas se puede concluir que todo vector fuerzaP 6= 0 produce un vector desplazamiento δ 6= 0. En lo sucesivo aceptaremos que se cumple esta propiedad.Esto es lo mismo que decir que la matriz de flexibilidad F no es singular o que su determinante es diferentede cero.
En estas condiciones la matriz de flexibilidad es invertible. Su inversa K es denominada matriz de rigidez.La matriz de rigidez permite calcular las fuerzas en función de los desplazamientos:
K = F−1−→P = Kδ (3)
2

En este caso la fila i de la matriz K sera el vector fuerza P que es necesario aplicar para lograr que seproduzca un desplazamiento unitario δi = 1 y que todos los demás sean nulos.
Esta matriz que es de dimensión n×n, también responde al criterio intuitivo de rigidez, que es contrarioal de flexibilidad. Cuanto más grande es un término de la matriz K, la fuerza necesaria, para producir undeterminado desplazamiento, tendrá que ser más grande.
La formulación de la relación, entre las fuerzas y los desplazamientos, con la matriz de flexibilidadconduce a los métodos de las fuerzas, mientras que la formulación con la matriz de rigidez conduce a losmétodos de los desplazamientos, como veremos más adelante.
3. Energía de deformación de la estructuraSabemos que el trabajo realizado por cualquier fuerza Pi tiene la forma:
Wi =
∫ δi
0
Pids (4)
Además, sabemos que las reacciones que se producen en los apoyos, dado que estos no se desplazan, noproducen trabajo.
Se puede agregar que de acuerdo a las hipótesis que hemos asumido, no existe intercambio con el exteriorde energía térmica y la energía cinética es despreciable. Por otro lado el material es elástico y lineal, o seaque toda la energía que recibe se convierte en energía potencial, en la forma de energía de deformación dela estructura, que denominaremos U . En estas condiciones es claro que el trabajo de las fuerzas aplicadas sedebe convertir en su totalidad en energía de deformación de la estructura. O sea que:
U =W =
n∑i=1
Wi =
n∑i=1
∫ δi
0
Pids (5)
Para calcular el trabajo W de las fuerzas aplicadas, teniendo en cuenta las hipótesis adoptadas delinealidad y superposición, tendremos que el trabajo no depende de la forma que es cargada la estructuray que solo depende de la carga total aplicada.
Dado que podemos cargar de cualquier manera la estructura se puede elegir cargarla de manera que todaslas cargas aumenten en forma simultanea conservando la proporcionalidad.
Es claro que en esas condiciones los desplazamientos también serán proporcionales a las cargasaplicadas. Luego el diagrama desplazamiento-fuerza en cada punto de aplicación de las fuerzas tiene laforma mostrada en la figura 2.
Figura 2: Se aplican las cargas proporcionalmente
Y en consecuencia:
Wi =1
2Piδi (6)
Entonces:
3

U =W =
n∑i=1
Wi =1
2
n∑i=1
Piδi =1
2δT · P =
1
2PT · δ (7)
Teniendo en cuenta que:
−→δ = FP (8)
Sustituyendo en la expresión 7 obtenemos:
U =W =1
2PTFP (9)
Obsérvese que la expresión del trabajo obtenida tiene solo términos de fuerzas al cuadrado, o sea que esuna forma cuadrática en las fuerzas Pi. Esta forma cuadrática esta caracterizada por la matriz F.
4. Propiedades de la matriz de flexibilidadTeorema 1. F es una matriz simétrica, es decir que fpq = fqp para todo p y q.
DemostraciónSi p = q es obvio que se cumple la igualdad.En el caso que p 6= q podemos demostrarlo utilizando el teorema de Betti o recorriendo otro camino de
carga, como a continuación se hace.Elegiremos un sistema de cargas de manera que si i 6= p e i 6= q entonces Pi = 0 o sea que solo son
distintas de cero las fuerzas Pp y Pq .Según 9 sabemos que:
W =1
2PTFP =
1
2
(fppP
2p + fpqPpPq + fqpPpPq + fqqP
2q
)(10)
y que:
δp = fppPp + fpqPq (11)δq = fqpPp + fqqPq (12)
Ahora procederemos a cargar la estructura de otra manera:
1. Cargo inicialmente Pp de cero hasta Pp, manteniendo Pq = 0. Es claro que en el punto de aplicaciónde Pq no se produce trabajo pues Pq = 0. Sabemos por 10 que al completar esta carga se tendrá que:
W =1
2PpfppPp =
1
2fppP
2p (13)
Y que los desplazamientos serán:
δp = fppPp (14)δq = fqpPp (15)
2. A continuación, cargo Pq de cero a Pq dejando Pp constante. Ahora tendremos trabajo de las fuerzasaplicadas en los dos puntos.
Tenemos entonces que los desplazamientos en los puntos se incrementan:
δp = fpqPq (16)δq = fqqPq (17)
En el punto de aplicación de la fuerza Pp, como se indica en la figura 3, se tendrá que:
Wp = PpfpqPq
.
Por su parte en el punto de aplicación de la fuerza Pq tenemos, como se indica en la figura 4, que:
Wq =1
2fqqP
2q
4

Figura 3: Pp en función de ∂p
Figura 4: Pq en función de ∂q
Sumando los trabajos producidos en las dos etapas de carga tenemos que:
W =1
2fppP
2p + fpqPpPq +
1
2fqqP
2q (18)
Como en las condiciones que estamos suponiendo el trabajo no depende de la forma que se colocó lacarga, podemos igualar la expresión 18 con la 10. Entonces tendremos que:
W =1
2(fppP
2p + fpqPpPq + fqpPqPp + fqqP
2q ) =
1
2fppP
2p + fpqPpPq +
1
2fqqP
2q (19)
Eliminando los términos similares y simplificando obtenemos que:
fpq = fqp (20)
que es lo que queríamos demostrar.
Teorema 2. La forma cuadrática definida por la matriz de flexibilidad F es semidefinida positiva, es decirque
∀−→P ⇒ PTFP ≥ 0
.
DemostraciónSi existiera un vector P tal que la forma cuadrática fuera negativa, al aplicar esa carga a un cuerpo que no
tiene energía de deformación, en vez de entregarle nosotros trabajo, estaríamos recibiendo trabajo del solido.
5

Esto nos permitiría generar trabajo con esa estructura y por otro lado la estructura quedaría con energía dedeformación negativa. Esto obviamente no es posible. Cabe agregar que si pudiéramos hacerlo generaríamosenergía con esa estructura y terminaríamos con los problemas energéticos del mundo.
Luego queda demostrado que la forma cuadrática es semidefinida positiva.Como consecuencia de lo anterior se puede ver fácilmente que ninguno de los términos diagonales de
la matriz F es negativo. O sea que Fii ≥ 0 para todo i. En caso que no fuera así tendríamos que al aplicarsolamente la fuerza Pi estaríamos teniendo que la forma cuadrática toma valores negativos, contradiciendolo que habíamos inferido anteriormente.
Teorema 3. SeaU = U(P1 . . . Pn) =W =
1
2PTFP
entonces∂U
∂Pi=
n∑k=1
fikPk
DemostraciónTenemos que:
U =1
2
n∑j=1
n∑k=1
fjkPjPk (21)
Cuando derivamos podemos distinguir cuatro casos:Un primer caso cuando j 6= i y k 6= i, en este caso al derivar se hacen cero las derivadas.Un segundo caso cuando j = i y k 6= i.Un tercer caso cuando k = i y j 6= i.Un cuarto caso cuando k = i y j = i.En estos últimos tres casos aparecen términos en la derivada.
∂U
∂Pi=
1
2
n∑k=1k 6=i
fikPk +1
2
n∑j=1j 6=i
fjiPj + fiiPi (22)
Por simetría de F sabemos que el segundo término de la suma es igual a
1
2
j=n∑j=1j 6=i
fijPj
Y en consecuencia es lo mismo que el primer termino. Luego se tiene que:
∂U
∂Pi=
k=n∑k=1k 6=i
fikPk + fiiPi (23)
Entonces, el segundo termino es el que falta en la primera sumatoria y obtenemos que:
∂U
∂Pi=
n∑k=1
fikPk (24)
Que es lo que queríamos demostrar.
Teorema 4. Segundo Teorema de CastiglianoSea
U = U(P1 . . . Pn) =W =1
2PTFP
entonces
δi =∂U
∂Pi
6

DemostraciónSabemos del teorema anterior que:
∂U
∂Pi=
n∑k=1
fikPk (25)
Y por otro lado de la expresión 1
δi =
n∑k=1
FikPk (26)
Juntando ambas expresiones se obtiene lo que se queríamos demostrar.
Teorema 5. La forma cuadrática definida por la matriz de flexibilidad es definida positiva.
SeaU = U(P1 . . . Pn) =W =
1
2PTFP
Entonces la forma cuadrática además de ser semidefinida positiva es también definida positiva o sea queademás se cumple que U = 0 solo cuando P = 0.
DemostraciónSabemos que la forma cuadrática no toma valores negativos y que tiene un mínimo U = 0 para P = 0.
Si tuviera otro valor de P 6= 0 que anule a U éste también tendría que ser un mínimo de la forma cuadrática.Luego se tienen que anular todas las derivadas parciales de U en relación a Pi para todo i tal que 1 ≤ i ≤ n.
Usando el teorema 3 y el segundo teorema de Castigliano (teorema 4) tendremos que se cumple paratodo i que:
∂U
∂Pi=
n∑k=1
fikPk = δi = 0 (27)
Luego, como todos los δi = 0 tenemos que el vector desplazamiento δ = 0. Por las consideraciones quehicimos en la sección 2 sabemos que si el vector P es distinto de cero entonces δ también es distinto de cero.Llegando a un absurdo pues habíamos supuesto que existía un valor de P distinto de cero que anulaba U ,con lo que hemos demostrado que con las hipótesis realizadas la forma cuadrática es definida positiva.
5. Energía de deformación con flexión y directaComo hemos visto las tensiones normales en un estado de flexión y directa puede expresarse de la forma:
σzz =N
A
(1 +
exx
ρ2y+eyy
ρ2x
)(28)
σxx = 0 (29)σyy = 0 (30)
Por ahora no consideraremos la energía de deformación generada por:
Torsión (que no aparece en problemas planos y solo aparece en problemas espaciales)
Cortante (que es generalmente despreciable en relación a la generada por flexión)
En general sabemos que la energía de deformación se puede expresar como:
U =1
2
∫V
T : DdV (31)
T : D = σxxεx + σyyεy + σzzεz + 2τxyεxy + 2τxzεxz + 2τyzεyz (32)
7

En el caso que estamos considerando, donde el origen de los ejes se encuentra en el baricentro de lasección y los ejes x e y son ejes principales de la sección, tenderemos que:
T : D = σzzεzz =σ2zz
E(33)
Sustituyendo obtenemos:
U =1
2
∫ L
0
dz
∫A
N2
EA2
(1 +
exx
ρ2y+eyy
ρ2x
)2
dA
=1
2
∫ L
0
N2
EA2dz
∫A
(1 +
exx
ρ2y+eyy
ρ2x
)2
dA
Desarrollando la integral en el área y teniendo en cuenta que los ejes son baricéntricos y principalestenemos que:∫
A
(1 +
exx
ρ2y+eyy
ρ2x
)2
dA =
∫A
(1 + 2
exx
ρ2y+ 2
eyy
ρ2x+e2xx
2
ρ4y+
2exeyxy
ρ2yρ2x
+e2yy
2
ρ4x
)dA =
= A+ 0 + 0 +e2xρ4yIy + 0 +
e2yρ4xIx = A
(1 +
e2xρ2y
+e2yρ2x
)Entonces
U =1
2
∫ L
0
N2
EA
(1 +
e2xρ2y
+e2yρ2x
)dz
U =1
2
∫ L
0
(N2
AE+M2y
EIy+M2x
EIx
)dz (34)
En definitiva obtenemos (cuando tomamos ejes principales) que la energía de deformación de la accióncombinada de directa y flexión en ambas direcciones, es la suma de la energía de deformación producida porcada una de las tres solicitaciones.
6. Desde el ángulo de la matriz de rigidezEn la expresión 5 se hubiera podido sustituir el vector P obteniendo la energía de deformación como una
forma cuadrática de los desplazamientos, cuyos coeficientes quedan definidos por la matriz K. Si se procedeen esa forma se obtiene que:
U =W =1
2δTKδ (35)
Teniendo en cuenta las propiedades de la matriz F y que K = F−1 se puede concluir que la matriz Kes:
Simétrica.
No singular.
Y que la forma cuadrática que define es:
Definida positiva.
Razonando en forma análoga a la realizada con la matriz de flexibilidad se puede concluir que si laenergía de deformación se expresa en función de los desplazamientos, se tendrá que:
Pi =∂U
∂δi
Esta expresión es conocida como el primer teorema de Castigliano.
8

Estos apuntes fueron elaborados por:Dr. Ing. Atilio Morquio
Ing. Lucía DelacosteColaboraron en la corrección:
Br. María Laura ReboredoIng. Valentina MachínIng. Agustin Spalvier
9