dpt. teoría de la señal, telemática y comunicaciones tema 1 · 5. capacidad sensorial externa....
TRANSCRIPT

TSTC
Tema 1Dpt. Teoría de la Señal, Telemática y Comunicaciones
INTRODUCCIÓN A LA ROBÓTICA
TSTC
2
Secciones
1. Introducción y definiciones.2. Visión General de la manipulación
mecánica.1. Posicionamiento y Cinemática2. Dinámica de Manipuladores.3. Planificación de Trayectorias.4. Control de Movimientos.5. Capacidad Sensorial Externa.
3. Estructuras de Robots

TSTC
3
1. Introducción y Definiciones
• ¿Qué es un Robot?Robota = Trabajo.Origen: Necesidad de flexibilizar los procesos de producción.Manipulador multifuncional y reprogramable, diseñado para mover materiales, piezas, herramientas o dispositivos especiales, mediante movimientos programables y variables que permitan llevar a cabo tareas diversas.
• Primer Robot Industrial:George Devol en 1960.Desarrollo durante los años 70, paralelamente al desarrollo del microprocesador.
TSTC
4
1. Introducción y Definiciones
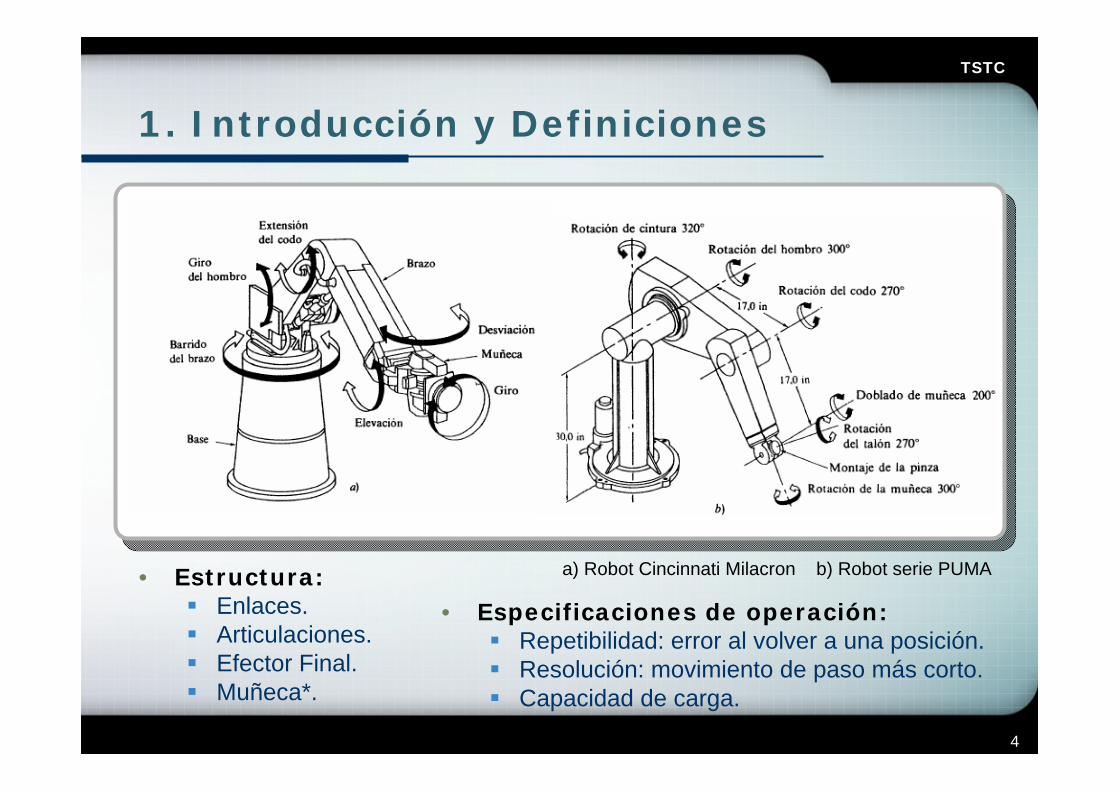
• Estructura:Enlaces.Articulaciones.Efector Final.Muñeca*.
a) Robot Cincinnati Milacron b) Robot serie PUMA
• Especificaciones de operación:Repetibilidad: error al volver a una posición.Resolución: movimiento de paso más corto.Capacidad de carga.

TSTC
5
1. Introducción y Definiciones
• Característica Fundamental:Manipulador reprogramable.
• Inicialmente los robots se limitaban a repetir una cierta secuencia de movimientos aprendida.
Actualmente se les intenta dotar de cierta inteligencia.
• Objetivos de la robótica: mejora de la productividad y calidad ($$$).
Mayor velocidad.Elevado tiempo de funcionamiento sin fallos.Mantenimiento reducido.

TSTC
6
1. Introducción y Definiciones
• Áreas de la robótica:Manipulación mecánica.Locomoción.Interacción Entorno-Maquina.Inteligencia Artificial.
• Nos centraremos fundamentalmente en la manipulación mecánica (clásico). Implica:
Mecánica.Control.Informática.

TSTC
7
2. Manipulación mecánica
• ¿En que consiste?
• ¿Problemas a resolver?
Situar al robot en una serie de posiciones de acuerdo con las ordenes de movimiento dadas y las condiciones de trabajo.
• Posicionamiento y Cinemática.
• Dinámica de Manipuladores.
• Planificación de Trayectorias.
• Control de movimientos.
• Capacidad sensorial externa.

TSTC
8
2.1. Posicionamiento y Cinemática
• Posicionamiento: Estudio de posiciones de objetos en el espacio tridimensional.
• Posicionamiento de un objeto:
• Posición• Orientación
• Herramienta: Sistemas de referencia.Transformaciones homogéneas.

TSTC
9
2.1. Posicionamiento y Cinemática
• Cinemática: Estudio de las características geométricas de los sistemas robóticos.
• La geometría del robot es cambiante. Articulaciones:Lineal o prismática.Rotacional.Torsión (revolución)
• Movimiento y ejes. Lineal Rotacional
Torsión Revolución
TSTC
10
2.1. Posicionamiento y Cinemática
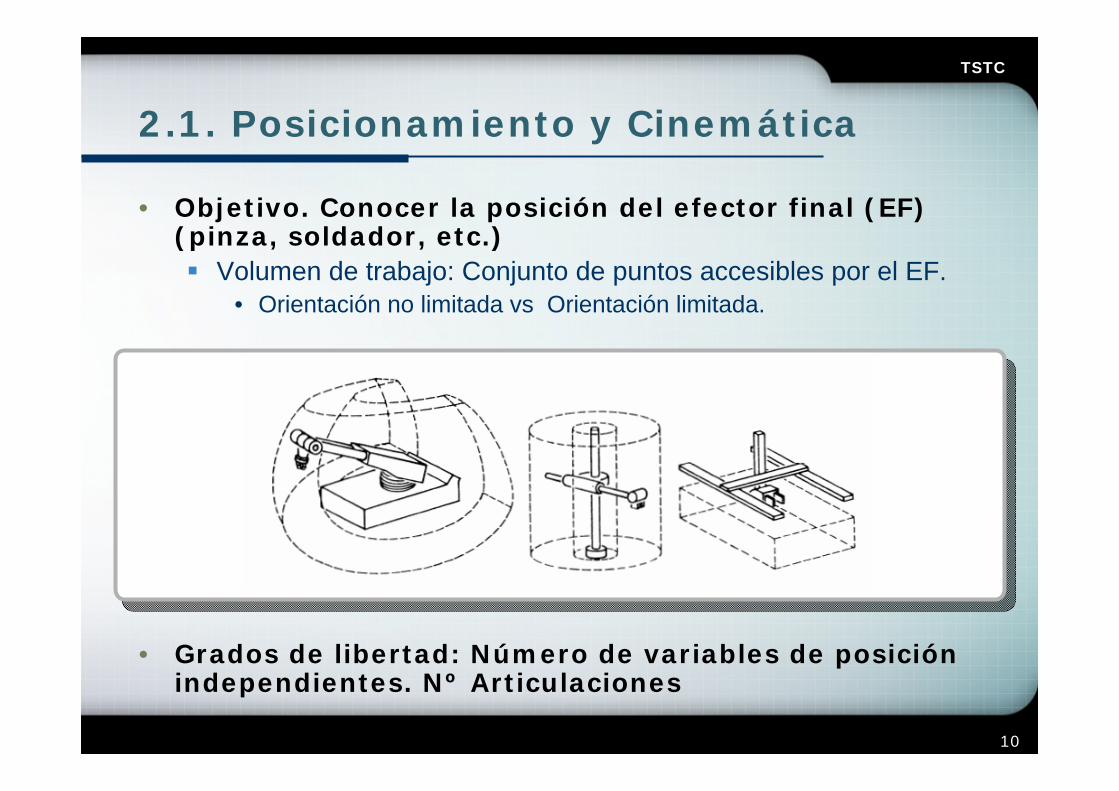
• Objetivo. Conocer la posición del efector final (EF) (pinza, soldador, etc.)
Volumen de trabajo: Conjunto de puntos accesibles por el EF.• Orientación no limitada vs Orientación limitada.
• Grados de libertad: Número de variables de posición independientes. Nº Articulaciones

TSTC
11
2.1. Posicionamiento y Cinemática
• Problema Cinemático Directo (PCD).Hallar la posición y orientación del EF respecto a la base en función de las variables de articulación θi.
Ecuaciones Cinemáticas:Posición = fpos({θi})
Orientación = for({θi})
Método: Denavit-Hartenberg
TSTC
12
2.1. Posicionamiento y Cinemática
• Problema Cinemático Inverso (PCI).Operación Inversa. Hallar las variables de articulación θi para alcanzar una determinada posición.
Mas relevante que el anterior.
Pero más difícil:• Resolución ecuaciones no lineales (aparición de funciones
trigonométricas).• Existencia de soluciones (Volumen de trabajo!).• Multiplicidad de soluciones.

TSTC
13
2.2. Dinámica de Manipuladores.
• La cinemática atiende a las posiciones pero ignora las fuerzas que hacen posible llegar a dichas posiciones.
• Ecuaciones dinámicas:
Fuerza = f (aceleraciones, velocidades, posiciones)
• Utilidad: Control y Simulaciones.

TSTC
14
2.3. Planificación de Trayectorias.
• Trayectoria: Camino que describe el EF en el espacio al realizar el movimiento.
θi = θi (t) ∀ i
• Objetivos planificación:Evitar obstáculos.Evitar movimientos bruscosy/o en zigzag (maximizarproductividad).

TSTC
15
2.3. Planificación de Trayectorias.
• Características de la trayectoria:θi función de variación suave en el tiempo.Todas las articulaciones comienzan y acaban el movimiento simultáneamente.
• Planificación de la trayectoria: generación de las funciones de movimiento.
• Tipos:Trayectorias cartesianas: Dominio cartesiano (coordenadas).Trayectorias interpoladas: Dominio de las variables de articulación (puntos intermedios).

TSTC
16
2.4. Control de Movimientos.
• Generación del movimiento: mediante aplicación de fuerzas (lineales) o pares de ellas (rotacionales) en las articulaciones.
• Control de movimiento: cálculo de los pares necesarios para conseguir posiciones y velocidades requeridas.
• Características adicionales: compesación de errores y perturbaciones.
Planificador de Trayectorias
Algoritmo de Control
Motor CC +Respuesta Dinámica
Sensores
+ -Posición deseada error tension CC
posición real

TSTC
17
2.5. Capacidad Sensorial Externa.
• Tipos de sensores:Internos: componentes del sistema de generación y control de movimientos.Externos: dotan al sistema robótico de capacidad sensorial para interactuar con el entorno de forma autónoma.
• Ejemplos:Subsistemas de visión (cámaras).Sensores de obstáculos (ultrasonidos, interruptores).Subsistemas de posicionamiento (GPS, Zigbee).Sensores de fuerza.…
• Fuerte relación con Inteligencia Artificial:Conocer el entorno no implica saber interactuar con él.
TSTC
18
2.6. Programación.
• El lenguaje de programación de robots sirve de interfaz a los usuarios.
Baja complejidad.Sencillo y directo.Generalmente visual.Capacidad de funcionamiento off-line: simular movimientos sin necesidad de la presencia física del robot ($$$).
• Ejemplos: Scorbase y ACL.

TSTC
19
3. Estructuras de Robots
• Clasificación por la interconexión de los enlaces:
Robot Serie-Paralelo GEC-Gadfly
Tipo paralelo: • Elementos mecánicos independientes
entre si.• Movimiento poco intuitivo.
Tipo serie:• Enlaces consecutivos unidos entre sí
por articulaciones.• Acumulación de errores.• Primeras articulaciones: fijan el área
de trabajo.• Últimas articulaciones (muñeca):
movimientos pequeños dentro del área de trabajo.
TSTC
20
3. Estructuras de Robots
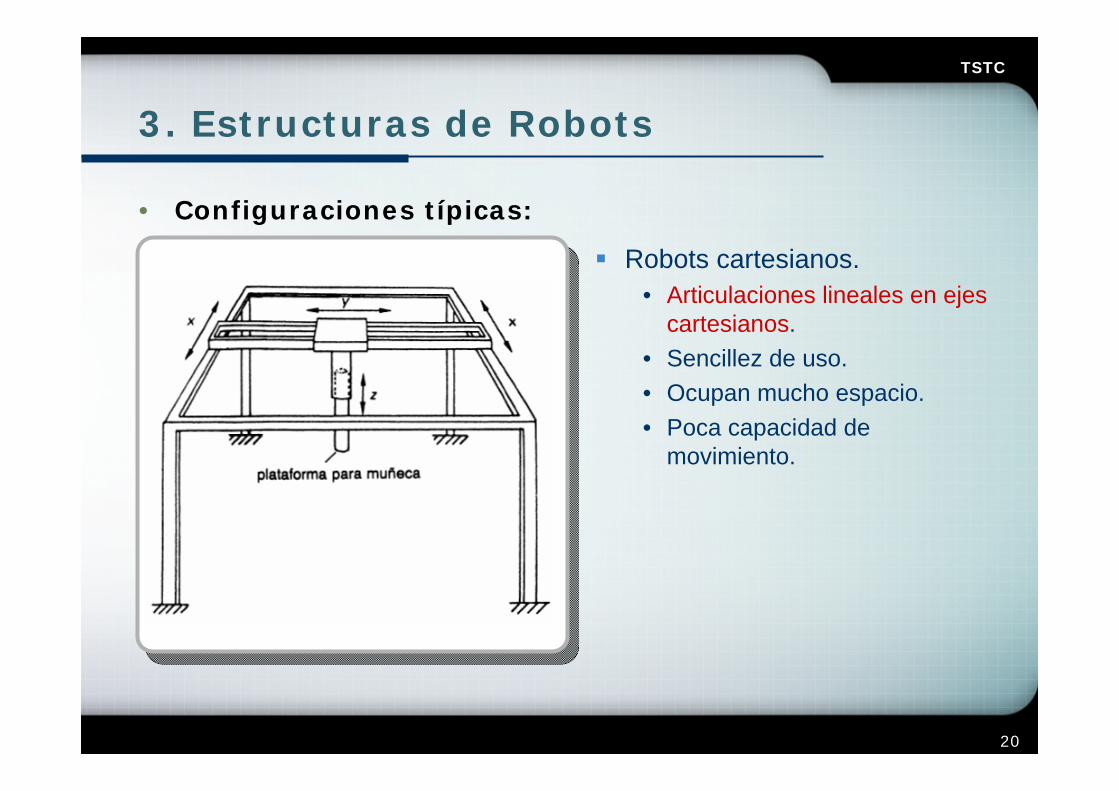
• Configuraciones típicas:
Robots cartesianos.• Articulaciones lineales en ejes
cartesianos.• Sencillez de uso.• Ocupan mucho espacio.• Poca capacidad de
movimiento.

TSTC
21
3. Estructuras de Robots
• Configuraciones típicas:
Robots giratorios.• Estilo antropomórfico.• Control complejo (coordenadas
cartesianas vs variables articulación.
• Gran volumen de trabajo y amplias posibilidades de movimiento.
Robot PUMA 500 de Unimation

TSTC
22
3. Estructuras de Robots
• Configuraciones típicas:
Robots mixtos Giratorio-Prismáticos.
• Menor dificultad de control.• Amplio volumen de trabajo.
Robot tipo SCARA (UMI-RTX)