definiciones básicas de la materia de...
TRANSCRIPT

Definiciones M 2007
Definiciones básicas de la materia de Mecanismos.
1.1 Estática:Es el análisis de fuerzas de sistemas estacionarios. Si los efectos inerciales son despreciados en sistemasque se mueven lentamente, también pueden analizarse como estáticos.
1.2 Dinámica:Es el análisis de fuerzas y pares en sistemas que cambian con el tiempo (se consideran efectos inerciales)
1.3 Cinemática:Es el estudio de movimiento en mecanismos e incluye el análisis de desplazamiento, velocidades,aceleraciones y síntesis de mecanismos.
1.4 Cinética:Es el estudio de las fuerzas que provocan el movimiento en los mecanismos.
1.5 Eslabón (link):Es un cuerpo rígido o miembros juntos que forman una cadena cinemática y que posee al menos dos nodos.
Binario Ternario Cuaternario
1.6 Marco (frame)Es el eslabón fijo o estacionario en un mecanismo.
1.7 Mecanismo:Sistemas donde su principal función es transmitir el movimiento. Es una cadena cinemática en la que al menosun eslabón está fijo.
1.8 Máquina:Un sistema que transmite fuerzas de una manera predeterminada para cumplir un objetivo (normalmente unamáquina está formada por un conjunto de mecanismos) hacer un trabajo.
1.9 Conexión o par cinemático (join):La conexión entre dos eslabones que permiten movimiento relativo son llamados pares cinemáticos.
1.10 Clasificación de los pares cinemáticos (tipos de juntas o uniones)
a) Bajo Par: Teóricamente tienen una superficie de contacto.b) Alto Par: Su contacto es a través de un punto o una línea. (baleros, engranes, levas)c) Par Envolvente: La conexión entre una banda y su polea, entre una cuerda y un tambor o entre unacadena y el sprocket.
Solamente existen siete (7) pares cinemáticos que son de bajo par, a saber:
1.- Revoluta ( R ) Permite solamente rotación (un grado de libertad)
2.- Prismática ( P ) Permite movimiento relativo de deslizamiento (un grado de libertad)
Miguel Angel Ríos Sánchez. (ITESM-CEM) 1 19/06/2012
Definiciones M 2007
3.- Hélice ( H ) Rotación relacionada con el ángulo de la hélice (un grado de libertad)
4.- Cilíndrica ( C ) Permite rotación y deslizamiento (dos grados de libertad)
5.- Esférico o Globular ( S ) Permite la rotación angular sobre los tres ejes coordenados (tres grados delibertad)
6.- Plano ( Pl ) Puede girar y trasladarse sobre un plano (tres grados de libertad)
7.- Junta universal ( U ) Conexión que combina dos pares revoluta (dos grados de libertad)
** Las conexiones de alto par no pueden ser fácilmente clasificadas.
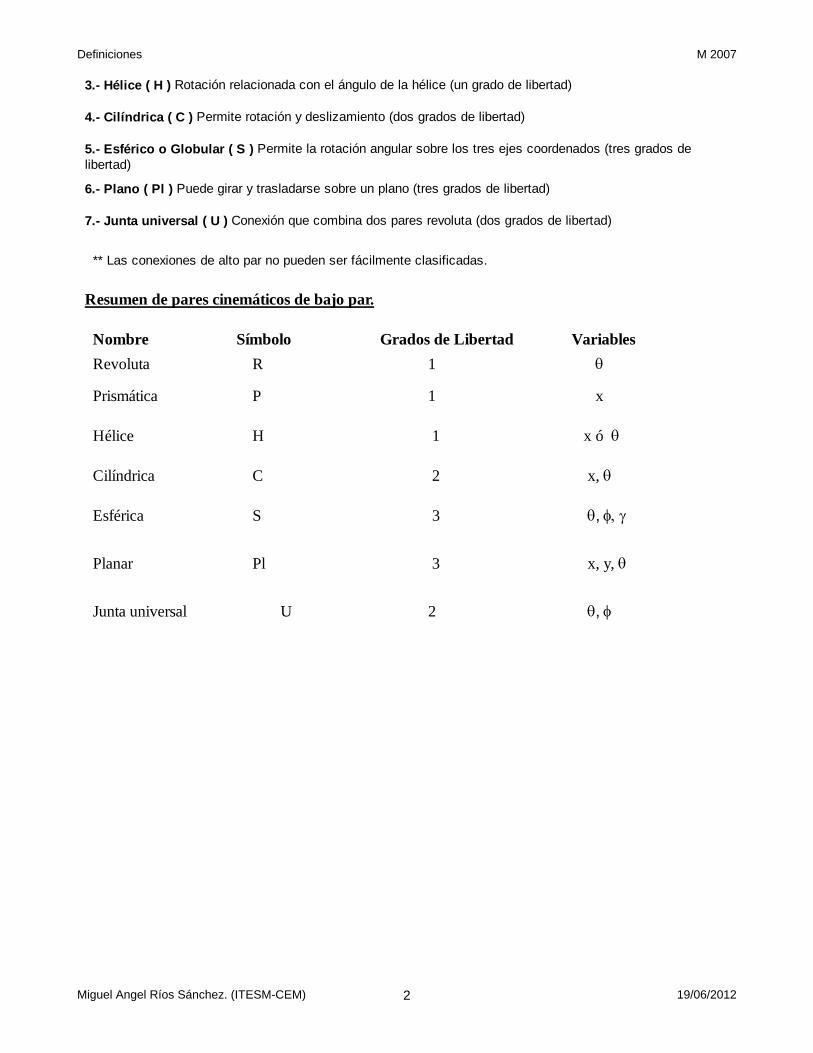
Resumen de pares cinemáticos de bajo par.
Nombre Símbolo Grados de Libertad VariablesRevoluta R 1 θ
Prismática P 1 x
Hélice H 1 x ó θ
Cilíndrica C 2 x, θ
Esférica S 3 θ, φ, γ
Planar Pl 3 x, y, θ
Junta universal U 2 θ, φ
Miguel Angel Ríos Sánchez. (ITESM-CEM) 2 19/06/2012

Definiciones M 2007
Ref: Design of Machinery Robert L. Norton Third edition Mc Graw-Hill (pag 28)
Miguel Angel Ríos Sánchez. (ITESM-CEM) 3 19/06/2012
Definiciones M 2007
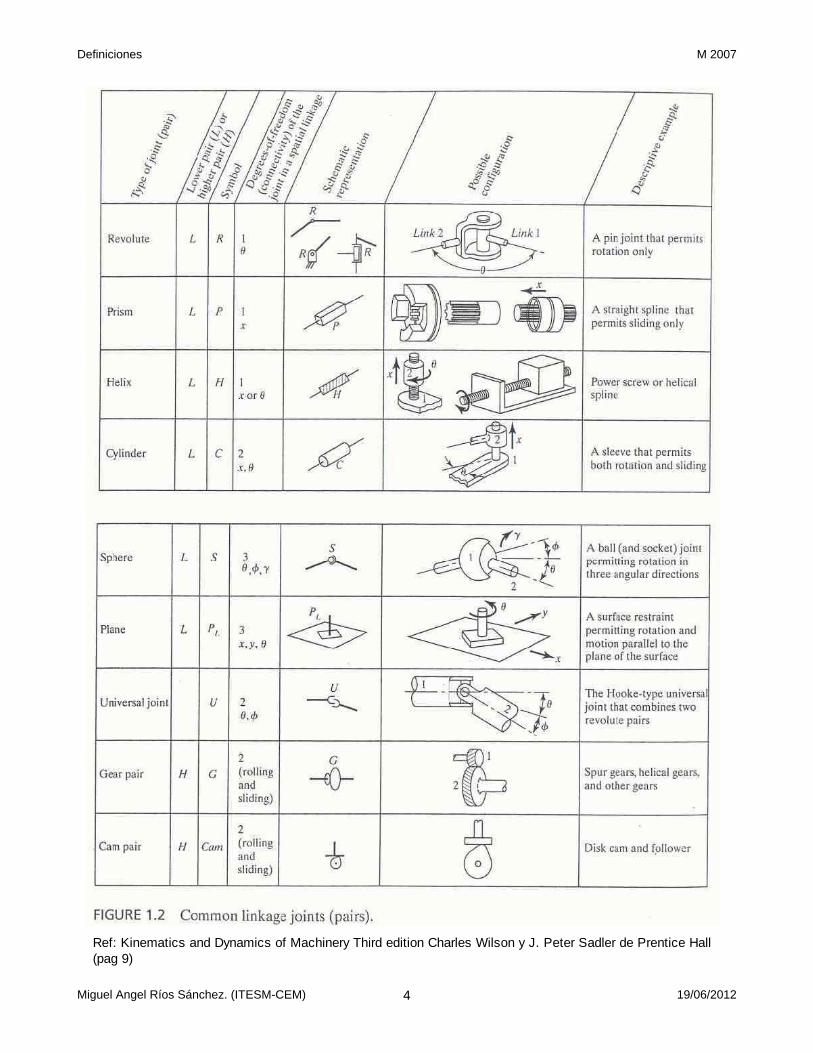
Ref: Kinematics and Dynamics of Machinery Third edition Charles Wilson y J. Peter Sadler de Prentice Hall(pag 9)
Miguel Angel Ríos Sánchez. (ITESM-CEM) 4 19/06/2012

Definiciones M 2007
1.11 Cadena cinemática:Es el ensamble de eslabones con pares cinemáticos, pueden ser del tipo abierta (Robot) o cerrada
1.12 Cadena cinemática cerrada:Cada eslabón esta conectado a dos o más eslabones.
Cerrada
Ejemplos:
Abierta
1.13 Mecanismo plano:Si todos los eslabones se mueven en planos paralelos.1.14 Inversión cinemática:Si diferentes eslabones son seleccionados como marcos (frame). El movimiento relativo será el mismo sinembargo el movimiento absoluto es diferente.
Tipos de movimiento.Traslación. La traslación de un cuerpo rígido ocurre cuando cada partícula sobre el cuerpo tieneexactamente el mismo movimiento que las otras partículas que lo forman.
Rotación. Si existe una línea recta en un cuerpo moviéndose de tal forma que todas las partículas del cuerpoque coinciden con esta línea tienen velocidad cero con respecto a una referencia, entonces se dice que estáen rotación.
Movimiento plano. Un movimiento que consiste en rotación y traslación.
Transmisión del movimiento.El movimiento se puede transmitir en tres formasa) Contacto directo. Entre dos miembros (leva seguidor, engranes)b) Por medio de un eslabón intermedio o biela (4 barras, biela manivela)c) Por medio de un conector flexible: cadenas, bandas
Grados de libertad (movilidad) GDL.Es el número de parámetros independientes requeridos para especificar la posición relativa de los eslabonescon respecto al marco.Para mecanismos formados por N eslabones y Ps pares simples (mecanismos planos)
Un sistema de N barras sin conectar tiene 3N grados de libertad (GDL), cuando un eslabón es sujeto a laestructura pierde sus 3 GDL
Ecuación de Gruebler´s
GDL = 3 L - 2 j - 3 Gdonde:
L = número de barras o eslabonesj = número de pares cinemáticosG= número de barras fijas (G siempre es 1)
por lo tantoGDL = 3 ( L-1) -2j
Miguel Angel Ríos Sánchez. (ITESM-CEM) 5 19/06/2012
Definiciones M 2007
Los pares cinemáticos de media junta cuentan la mitad porque solamente quitan un grado de libertad
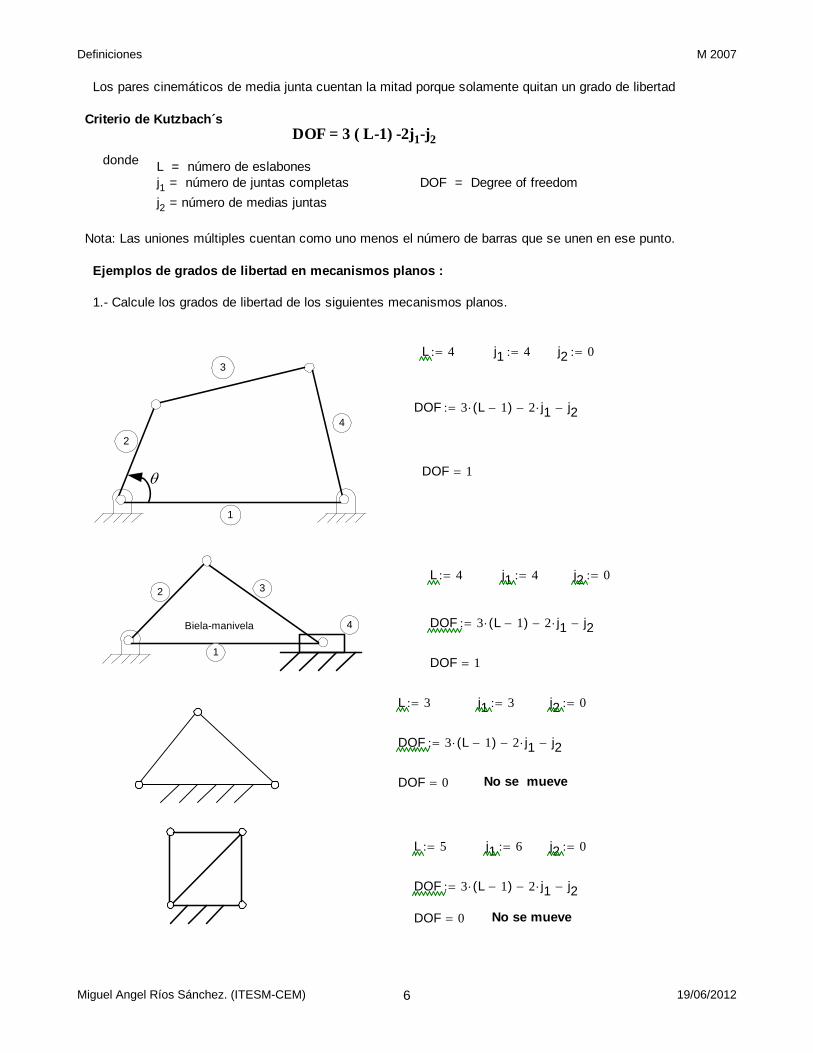
Criterio de Kutzbach´sDOF = 3 ( L-1) -2j1-j2
donde L = número de eslabonesj1 = número de juntas completasj2 = número de medias juntas
DOF = Degree of freedom
Nota: Las uniones múltiples cuentan como uno menos el número de barras que se unen en ese punto.
Ejemplos de grados de libertad en mecanismos planos :
1.- Calcule los grados de libertad de los siguientes mecanismos planos.
1
2
3
4
θ
L 4:= j1 4:= j2 0:=
DOF 3 L 1−( )⋅ 2 j1⋅− j2−:=
DOF 1=
Biela-manivela
1
2 3
4
L 4:= j1 4:= j2 0:=
DOF 3 L 1−( )⋅ 2 j1⋅− j2−:=
DOF 1=
L 3:= j1 3:= j2 0:=
DOF 3 L 1−( )⋅ 2 j1⋅− j2−:=
DOF 0= No se mueve
L 5:= j1 6:= j2 0:=
DOF 3 L 1−( )⋅ 2 j1⋅− j2−:=
DOF 0= No se mueve
Miguel Angel Ríos Sánchez. (ITESM-CEM) 6 19/06/2012

Definiciones M 2007
L 6:= j1 8:= j2 0:=
DOF 3 L 1−( )⋅ 2 j1⋅− j2−:=
DOF 1−= No se mueve y es más rígido
1
2
3
4
5
6
Whitworth
L 6:= j2 0:= j1 7:=
DOF 3 L 1−( )⋅ 2 j1⋅− j2−:=
DOF 1=
Datos : L 4:= j1 3:= j2 1:=
GDL 3 L 1−( )⋅ 2 j1⋅− j2−:=
GDL 2= Se necesitan dosactuadores
GDL = grados de libertad
L 7:= j1 8:= j2 0:=
GDL 3 L 1−( )⋅ 2 j1⋅− j2−:= GDL 2= Se necesitan dos motores o actuadores
Miguel Angel Ríos Sánchez. (ITESM-CEM) 7 19/06/2012
Definiciones M 2007
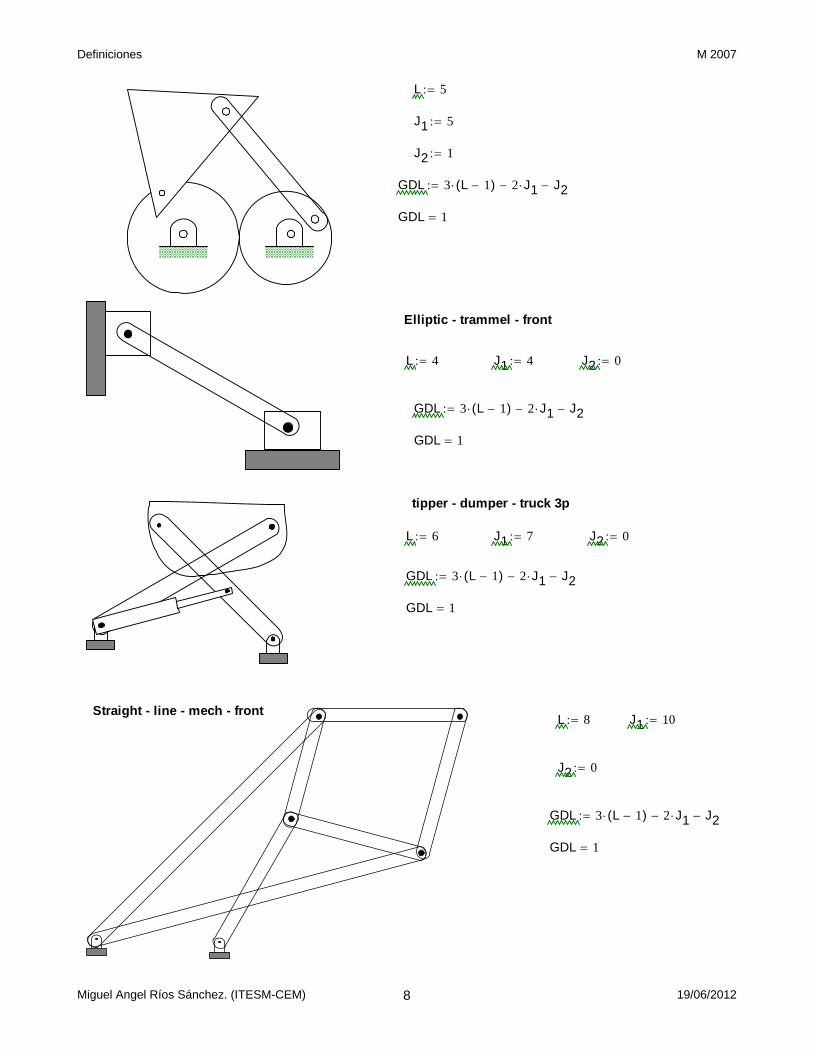
L 5:=
J1 5:=
J2 1:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 1=
Elliptic - trammel - front
L 4:= J1 4:= J2 0:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 1=
tipper - dumper - truck 3p
L 6:= J1 7:= J2 0:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 1=
Straight - line - mech - frontL 8:= J1 10:=
J2 0:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 1=
Miguel Angel Ríos Sánchez. (ITESM-CEM) 8 19/06/2012
Definiciones M 2007
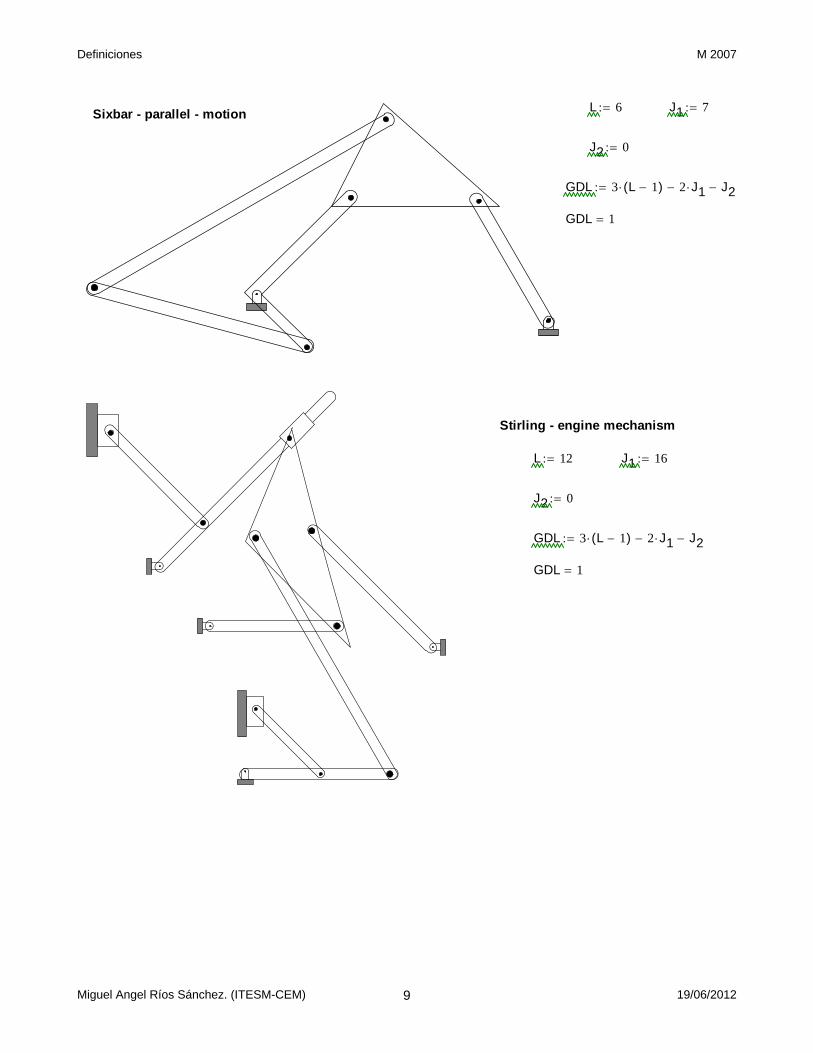
L 6:= J1 7:=Sixbar - parallel - motion
J2 0:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 1=
Stirling - engine mechanism
L 12:= J1 16:=
J2 0:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 1=
Miguel Angel Ríos Sánchez. (ITESM-CEM) 9 19/06/2012

Definiciones M 2007
Symmetrical coupler curves
L 7:= J1 9:=
J2 0:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 0= No se mueve
Mecanismo de Scotch
L 4:= J1 4:=
J2 0:=
GDL 3 L 1−( )⋅ 2 J1⋅− J2−:=
GDL 1=
Criterios de Grashof. (1883)
En un mecanismo de cuatro barras plano, existen tres formas de movimiento de la barra motriz y laseguidora:Dependiendo de cuál eslabón es el que esta fijo, varios tipos de mecanismos pueden resultar que son:
* Rotatorio - Rotatorio Drag link (double crank)* Rotatorio - Oscilatorio Crank - rocker* Oscilatorio - Oscilatorio Double rocker
El movimiento de las cuatro barras no esta influenciado por la forma de las barras. El movimiento estadeterminado únicamente por las longitudes de las barras
Miguel Angel Ríos Sánchez. (ITESM-CEM) 10 19/06/2012
Definiciones M 2007
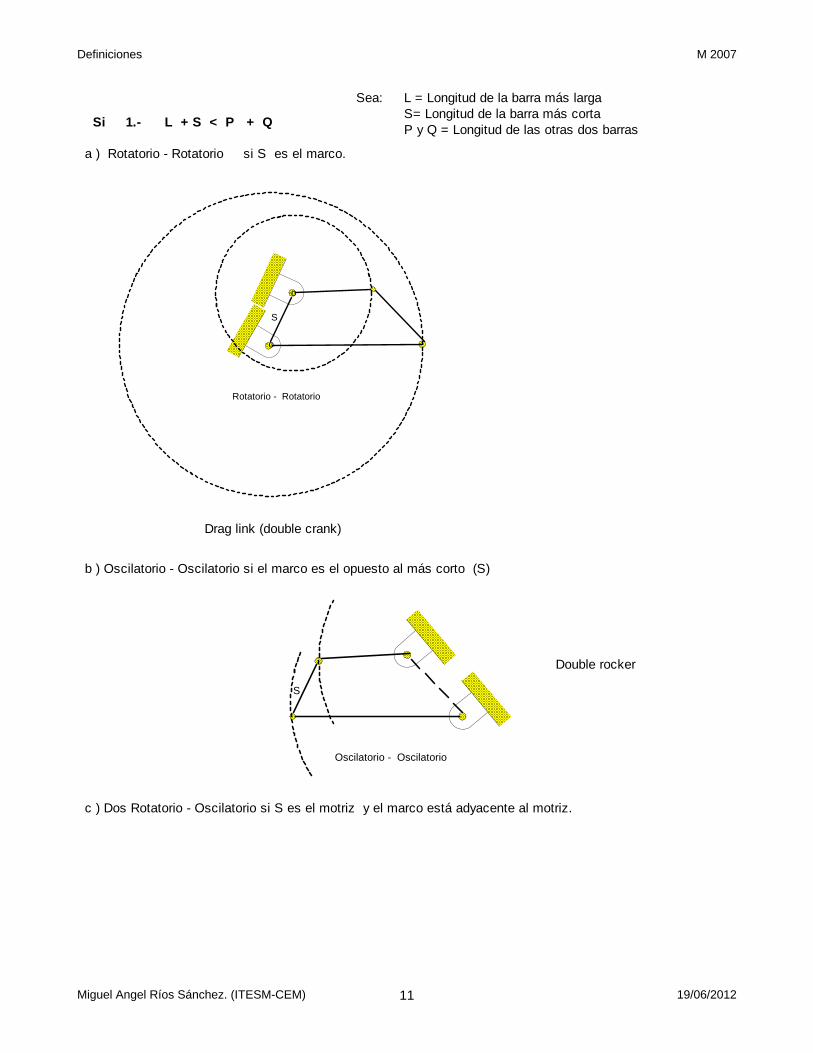
Sea: L = Longitud de la barra más largaS= Longitud de la barra más cortaP y Q = Longitud de las otras dos barrasSi 1.- L + S < P + Q
a ) Rotatorio - Rotatorio si S es el marco.
o
S
o
Rotatorio - Rotatorio
Drag link (double crank)
b ) Oscilatorio - Oscilatorio si el marco es el opuesto al más corto (S)
Oscilatorio - Oscilatorio
S
Double rocker
c ) Dos Rotatorio - Oscilatorio si S es el motriz y el marco está adyacente al motriz.
Miguel Angel Ríos Sánchez. (ITESM-CEM) 11 19/06/2012
Definiciones M 2007
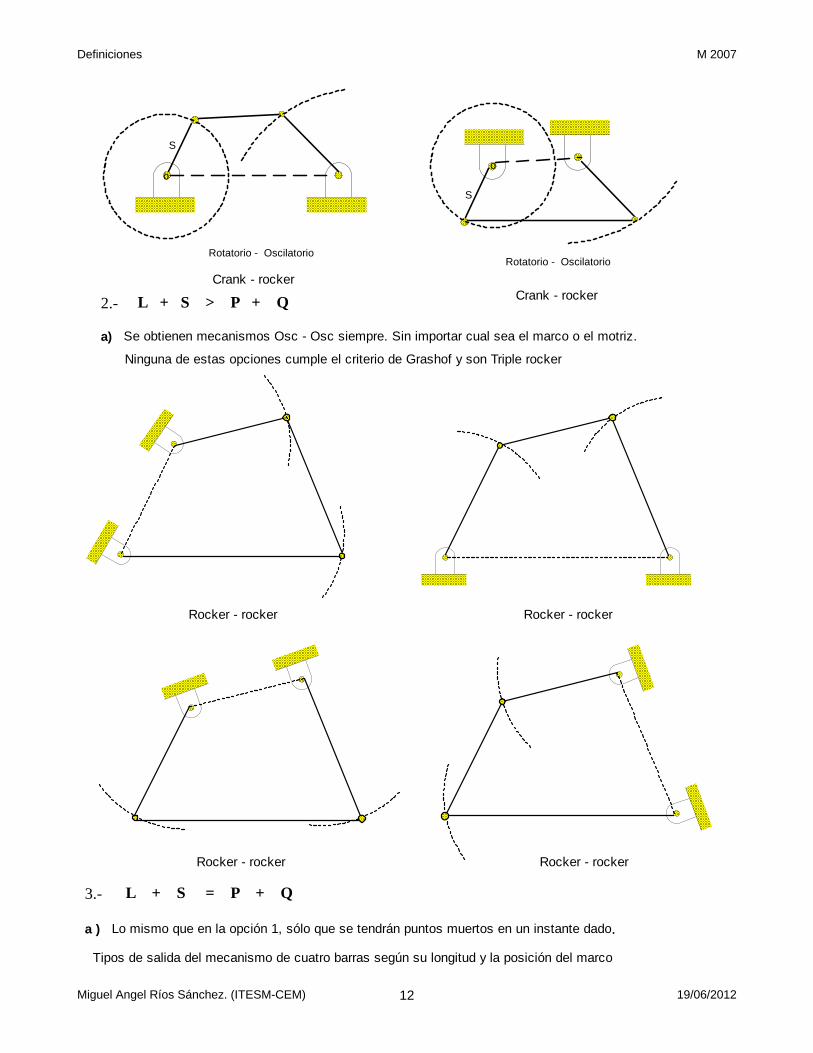
o
Rotatorio - Oscilatorio
S
o
Rotatorio - Oscilatorio
S
Crank - rockerCrank - rocker2.- L + S > P + Q
a) Se obtienen mecanismos Osc - Osc siempre. Sin importar cual sea el marco o el motriz.
Ninguna de estas opciones cumple el criterio de Grashof y son Triple rocker
Rocker - rocker Rocker - rocker
Rocker - rocker Rocker - rocker
3.- L + S = P + Q
a ) Lo mismo que en la opción 1, sólo que se tendrán puntos muertos en un instante dado.
Tipos de salida del mecanismo de cuatro barras según su longitud y la posición del marco
Miguel Angel Ríos Sánchez. (ITESM-CEM) 12 19/06/2012
Definiciones M 2007
Nota: El mecanismo de cuatro barras se puede armar siempre y cuando la longitud de la barra máslarga sea menor que la suma de las otras tres barras.
( )L S P Q< + +
Si llega a ser igual, se puede ensamblar pero no se mueve.
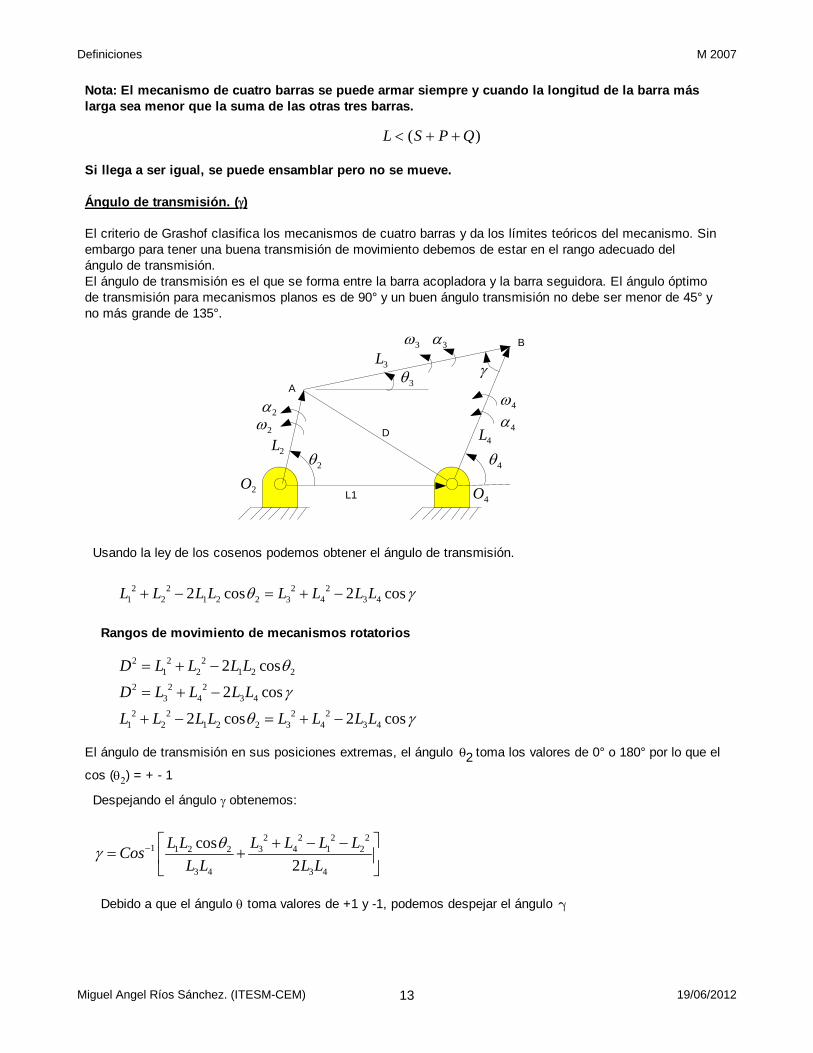
Ángulo de transmisión. (γ )
El criterio de Grashof clasifica los mecanismos de cuatro barras y da los límites teóricos del mecanismo. Sinembargo para tener una buena transmisión de movimiento debemos de estar en el rango adecuado delángulo de transmisión.El ángulo de transmisión es el que se forma entre la barra acopladora y la barra seguidora. El ángulo óptimode transmisión para mecanismos planos es de 90° y un buen ángulo transmisión no debe ser menor de 45° yno más grande de 135°.
A
B
L1
4θ
3θ
2θ
2ω
3ω
4ω2α
3α
4α
2O
2L
3L
4L
γ
4O
D
Usando la ley de los cosenos podemos obtener el ángulo de transmisión.
2 2 2 21 2 1 2 2 3 4 3 42 cos 2 cosL L L L L L L Lθ γ+ − = + −
Rangos de movimiento de mecanismos rotatorios
2 2 21 2 1 2 2
2 2 23 4 3 4
2 2 2 21 2 1 2 2 3 4 3 4
2 cos
2 cos
2 cos 2 cos
D L L L L
D L L L L
L L L L L L L L
θ
γ
θ γ
= + −
= + −
+ − = + −
El ángulo de transmisión en sus posiciones extremas, el ángulo θ2 toma los valores de 0° o 180° por lo que el
cos (θ2) = + - 1
Despejando el ángulo γ obtenemos:
2 2 2 21 3 4 1 21 2 2
3 4 3 4
cos2
L L L LL LCosL L L L
θγ − ⎡ ⎤+ − −= +⎢ ⎥
⎣ ⎦
Debido a que el ángulo θ toma valores de +1 y -1, podemos despejar el ángulo γ
Miguel Angel Ríos Sánchez. (ITESM-CEM) 13 19/06/2012
Definiciones M 2007
2 2 2 21 1 2 3 4 3 4
11 2 1 2
2 2 2 21 1 2 3 4 3 4
21 2 1 2
cos2
cos2
m
m
L L L L L LL L L L
L L L L L LL L L L
γ
γ
−
−
⎡ ⎤+ − −= +⎢ ⎥
⎣ ⎦
⎡ ⎤+ − −= −⎢ ⎥
⎣ ⎦
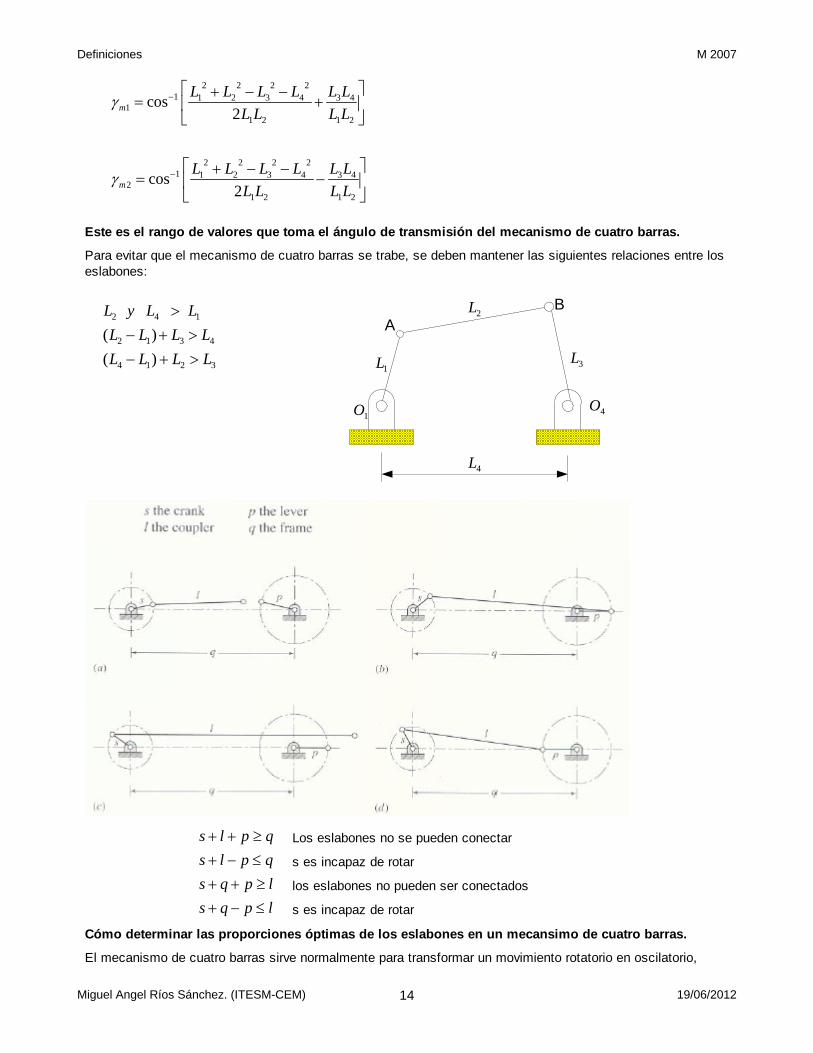
Este es el rango de valores que toma el ángulo de transmisión del mecanismo de cuatro barras.
Para evitar que el mecanismo de cuatro barras se trabe, se deben mantener las siguientes relaciones entre loseslabones:
AB
1L
2L
3L
4L
1O 4O
2 4 1
2 1 3 4
4 1 2 3
( )( )
L y L LL L L LL L L L
>− + >− + >
s l p q+ + ≥ Los eslabones no se pueden conectar
s l p q+ − ≤ s es incapaz de rotar
s q p l+ + ≥ los eslabones no pueden ser conectados
s q p l+ − ≤ s es incapaz de rotar
Cómo determinar las proporciones óptimas de los eslabones en un mecansimo de cuatro barras.
El mecanismo de cuatro barras sirve normalmente para transformar un movimiento rotatorio en oscilatorio,
Miguel Angel Ríos Sánchez. (ITESM-CEM) 14 19/06/2012
Definiciones M 2007
además de transmitir fuerzas por lo que el ángulo de transmisión es muy importante tratar de obtener el ángulomás adecuado que es el de 90° o lo más cercano posible a este valor para cualquier posición de la barramotriz. Observe que el ángulo de transmisión no es constante y varía para todas las posibles posiciones de labarra motriz.Existen gráficas que muestran el ángulo de transmisión y que me permiten fácilmente seleccionar entre variasposibles soluciones como lo veremos más adelante.
TAREA: Se revisará en el examen parcial
Investigar qué es la ventaja mecánica, para qué sirve y cómo se calcula.
Miguel Angel Ríos Sánchez. (ITESM-CEM) 15 19/06/2012