mecanismo 4 barras reporte
DESCRIPTION
REPORTE DE UN MECASNIMO DE 4 barras y simulacion es solid woksTRANSCRIPT
UNIVERSIDAD POLITÉCNICA DE TLAXCALA.
ANÁLISIS DE POSICIÓN Y VELOCIDAD
ALUMNOS:
BLANCA NOHEMI FLORES SALAZARLUIS ENRIQUE HERNÁNDEZ SÁNCHEZ
PROFESOR: JORGE CARRO SUÁREZ
MATERIA: ANÁLISIS DE MECANISMOS
INGENIERIA : MECATRÓNICAGRUPO: “5B”
FECHA: 16 DE FEBRERO DEL 2013
1
ÍNDICE
INTRODUCCIÓN 3
OBJETIVO 3
SUSTENTO TEÓRICO 3
Cinemática y cinética. 3
Conceptos fundamentales de cinemática grados de libertad 4
Tipos de movimiento. 4
Eslabones, juntas y cadenas cinemáticas 4
Mecanismos y máquinas 5
Eslabones, juntas y cadenas cinemáticas 5
La condición de Grashof 5
DESARROLLO 6
1ER MECANISMO 6
2DO MECANISMO (MEJORA) 10
DISCUSIÓN DE RESULTADOS 12
CONCLUSIÓN GENERAL 13
REFERENCIAS BIBLIOGRÁFICAS 13
INTRODUCCIÓN
2
Las estructuras son las bases para el diseño de mecanismos complejos. En esta práctica les presentaremos el análisis del mecanismo limpiador de ventana y la propuesta de una mejora, logrando limpiar por completo la ventana sustituyendo el desplazamiento del primer balancín, que inicialmente tenía un alcance de 120°. Esto se logró haciendo el análisis por medio de la teoría de cuatro barras para ello tenemos que conocer una serie de conceptos que facilitan un buen diseño para lograr un buen funcionamiento de todos los componentes del mecanismo.
OBJETIVO
Al finalizar de leer este reporte el alumno:
Conocerá los primeros conceptos de análisis de mecanismos. Diseñar y realizar un propio mecanismo de 4 barras mediante SolidWorks.
SUSTENTO TEÓRICO
Cinemática y cinética.
Cinemática: Estudio del movimiento sin consideración de las fuerzas. Cinética: Estudio de fuerzas en sistemas en movimiento.
Un propósito principal de la cinemática es crear (diseñar) los movimientos deseados de los elementos mecánicos considerados, y luego calcular matemáticamente las posiciones, velocidades y aceleraciones que tales movimientos generarán sobre dichos elementos.
Mecanismos y máquinas
Mecanismo. Sistema de elementos dispuestos para transmitir movimiento en un modo predeterminado. Ejemplos: sacapuntas de manivela, obturador de cámara fotográfica, reloj analógico, silla plegadiza, lámpara ajustable de escritorio y sombrilla.
Máquina. Sistema de elementos dispuestos para transmitir movimiento y energía en un modo predeterminado. Ejemplos: batidora o mezcladora de alimentos, puerta de la bóveda de un banco, engranaje de transmisión de un automóvil y robot.
Conceptos fundamentales de cinemática grados de libertad
3
El número de grados de libertad (GDL) de un sistema es el número de parámetros independientes que se necesitan para definir unívocamente su posición en el espacio en cualquier instante. En el plano se requiere de tres parámetros (GDL): Dos coordenadas lineales (x,y) y una coordenada angular (). En el espacio se requiere de seis GDL: tres distancias (x,y,z) y tres ángulos (,,). Se define cuerpo rígido como aquel que no experimenta ninguna deformación.
Tipos de movimiento.
Rotación pura: El cuerpo posee un punto (centro de rotación) que no tiene movimiento con respecto al marco de referencia estacionario. Todos los demás puntos del cuerpo describen arcos respecto a ese centro. Una línea de referencia marcada en el cuerpo a través de su centro cambia únicamente en orientación angular. Traslación pura Todos los puntos en el cuerpo describen trayectorias paralelas (curvas o rectas). Una línea de referencia trazada en el cuerpo cambia su posición lineal pero no su orientación o posición angular. Movimiento complejo Es una combinación simultánea de rotación y traslación.
Traslación pura: Todos los puntos del cuerpo describen trayectorias paralelas (curvilíneas o rectilíneas). Una línea de referencia trazada en el cuerpo a través del centro cambia solo su orientación angular.Movimiento complejo: Una combinación simultánea de rotación y traslación.
Eslabones, juntas y cadenas cinemáticas
Eslabón: Cuerpo rígido que posee al menos dos nodos, que son los puntos de unión con otros eslabones. El número de nodos le da su nombre al eslabón: Binario = dos nodos, Terciario = tres nodos, etc. Junta o par cinemático Conexión entre dos o más eslabones que permite algún movimiento o movimiento potencial entre los eslabones conectados. Pueden clasificarse en varios modos:
1) Por el número de grados de libertad.
- Rotacional 1 GDL - Prismática o Deslizante 1 GDL2) Por el tipo de contacto entre los elementos. - Unión completa o par cinemático inferior: contacto superficial - Unión media o par cinemático superior: contacto sobre una línea o un punto A las juntas con dos GDL se les llama semijuntas.
3) Por el tipo de cierre de la junta. Forma: su forma permite la unión o el cierre Fuerza: requiere de una fuerza externa para mantenerse en contacto o cierre.
4
4) Por el número de eslabones conectados u orden de la junta. Se define como el número de eslabones conectados menos uno. Cadena cinemática Es un ensamble de eslabones y juntas interconectados de modo que proporcionen un movimiento de salida controlado en respuesta a un movimiento de entrada proporcionado. Mecanismo es una cadena cinemática en la cual por lo menos un eslabón ha sido fijado o sujetado al marco de referencia (el cual puede estar en movimiento).Máquina es una combinación de cuerpos resistentes dispuestos para hacer que las fuerzas mecánicas de la naturaleza realicen trabajo acompañado por movimientos determinados. Es un conjunto de mecanismos dispuestos para transmitir fuerzas y realizar trabajo.
La condición de Grashof
Es una relación muy simple que predice el comportamiento de rotación o rotabilidad de las inversiones de un eslabonamiento de cuatro barras basado solo en las longitudes de los eslabones.
Sea:S= longitud del eslabón más cortoL= longitud del eslabón más largoP= longitud de un eslabón restanteQ= longitud de un eslabón restante
Luego si:
S+L<= P+Q
El eslabonamiento es Grashof, y por lo menos un eslabón será capaz de realizar una revolución completa con respecto al plano de fijación. Si esa desigualdad no es cierta, entonces el eslabonamiento es no-Grashof, y ningún eslabón será capaz de realizar una revolución completa relativa respecto al plano de fijación.
Se tienen los siguientes casos:
S + L < P + Q
Si se fija uno u otro eslabón adyacente al más corto y es la manivela, se obtiene una manivela-balancín, en la cual el eslabón más corto girará completamente y oscilará el otro eslabón pivotado a tierra.
Si se fija el eslabón más corto se logrará una doble manivela, en la que los dos eslabones pivotados a tierra realizan revoluciones completas, como también lo hace el acoplador.
5
Si se fija el eslabón opuesto al más corto, se obtendrá un doble balancín, en el que oscilan los dos eslabones fijos pivotados a tierra y sólo el acoplador realiza una revolución completa.
S + L > P + Q
Cuando no se satisface la condición exigida por la ley de Grashof y la suma de longitudes de las barras más corta y más larga es mayor que la suma de las otras dos, el mecanismo sólo puede funcionar como doble balancín.
S + L = P + Qo Paralelogramoo Anti paralelogramoo Doble paralelogramo
La ecuación de Kutzbach- Gruebler ayuda a predecir la movilidad de cualquier mecanismo con movimientos planos y se expresa de la siguiente forma:
m=3 (n−1 )−2 f 1−f 2En donde:
m=movimiento o número de grados de libertadn=número total de eslabones, incluyendo el pisof1=número de uniones de un grado de libertadf2=número de uniones de dos grados de libertad
La solución de esta ecuación determina como actúa el mecanismo y las condiciones son las siguientes.
m≤ -1 El dispositivo es una estructura estáticamente indeterminada
m=0 El dispositivo es una estructura estáticamente determinada
m≥1 Mecanismo desmodrómico, dada la posición de un elemento se conoce también la posición de los demás.
m=2 Mecanismo diferencialm>2 Mecanismo con n grados de libertad
6
DESARROLLO
1ER MECANISMO.
Lo primero que hicimos fue calcular cuántos grados de libertad tiene nuestro mecanismo por medio de la ecuación de Kutzbach- Gruebler.
Número de enlaces L=4Número de articulaciones completas J1=4Número de medias articulaciones J2=0
Númerode grados de libertad=3 (L−1 )−2J 1−J2Númerode grados de libertad=3 ( (4 )−1 )−2 (4 )−(0 )Númerode grados de libertad=1=Mecanismo
Después se realizó el diseño de 4 barras y se demostró que nuestro mecanismo era de biela-balancín como se muestra a continuación. En nuestro caso ocupamos las siguientes medidas:
L= 34.5 cmS= 9.7 cmQ= 34.5 cmP= 10.3 cm
L+S=34.5+9.7cm=44.2cmQ+P=34.5cm+10.3cm=44.8cm
L+S≤Q+P
Con estas medidas construimos el siguiente mecanismo (FIG. 1 y 2) en papel cascaron para comprobar su funcionamiento físicamente.
FIG. 1. Mecanismo biela-balancín hecho en papel cascarón.
7
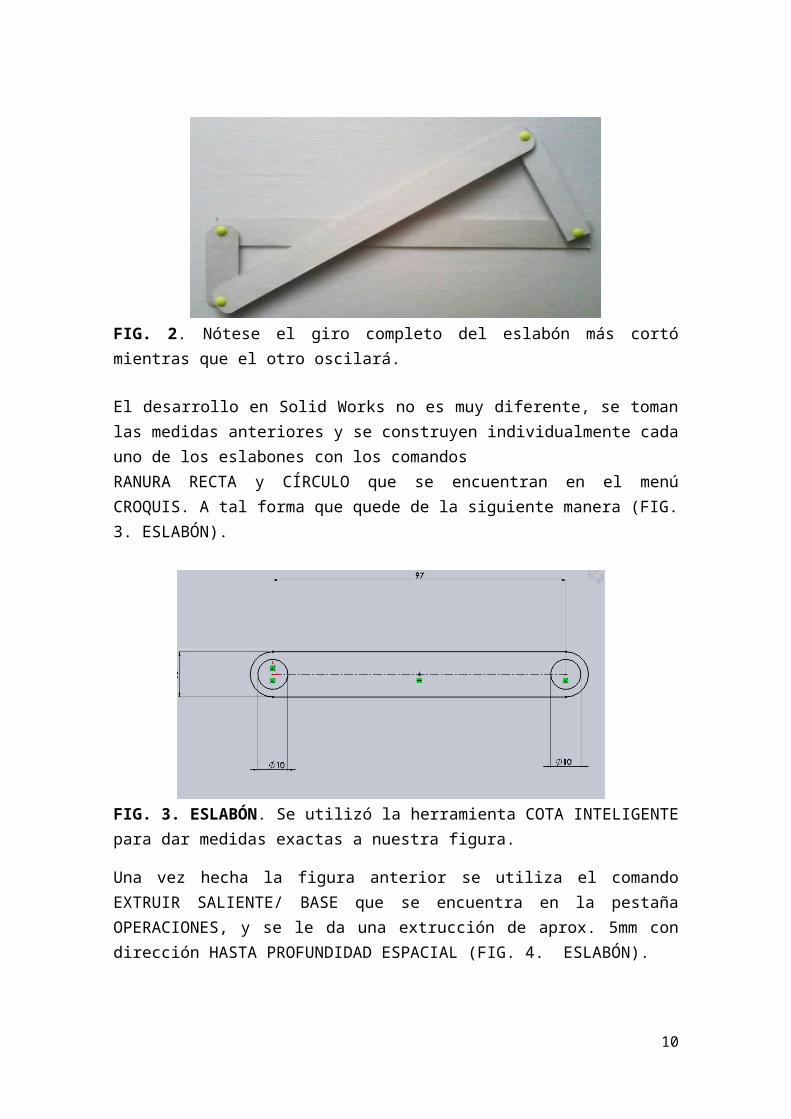
FIG. 2. Nótese el giro completo del eslabón más cortó mientras que el otro oscilará. El desarrollo en Solid Works no es muy diferente, se toman las medidas anteriores y se construyen individualmente cada uno de los eslabones con los comandosRANURA RECTA y CÍRCULO que se encuentran en el menú CROQUIS. A tal forma que quede de la siguiente manera (FIG. 3. ESLABÓN).
FIG. 3. ESLABÓN. Se utilizó la herramienta COTA INTELIGENTE para dar medidas exactas a nuestra figura.
Una vez hecha la figura anterior se utiliza el comando EXTRUIR SALIENTE/ BASE que se encuentra en la pestaña OPERACIONES, y se le da una extrucción de aprox. 5mm con dirección HASTA PROFUNDIDAD ESPACIAL (FIG. 4. ESLABÓN).
8
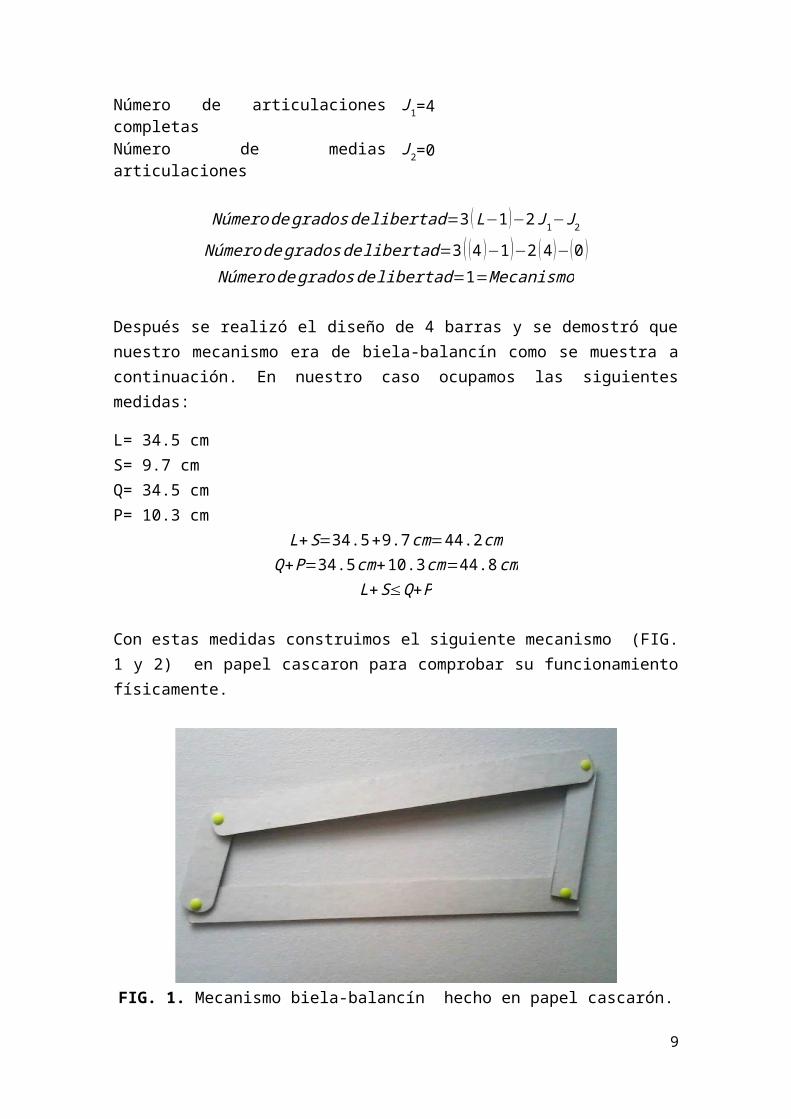
FIG. 4. ESLABÓN. Sólido completo desde vista isométrica.
Cuando se terminen las cuatro piezas se tendrán que ensamblar, para eso abrimos un nuevo documento ENSAMBLAJE y ahora se ocupara el comando RELACIÓN DE POSICIÓN con el cual aseguraremos el único movimiento permitido por nuestras piezas que será circular.
Como habíamos mencionado ocuparemos el primer caso de Grashof donde fijaremos el eslabón adyacente al más corto que será uno de 34.5 cm, por lo que el diseño debe quedar de la siguiente manera (Fig.5. Mecanismo de 4 barras biela-balancín):
Fig.5. Mecanismo de 4 barras biela-balancín. El eslabón más corto (9.7 cm) el de la izquierda que hará giro completo, y su opuesto el balancín de medidas (10.3 cm) que oscilará.
9
Por ultimo para comprobar su funcionamiento nos ubicamos en la pestaña ESTUDIO DE MOVIMIENTO donde ocuparemos la función MOTOR ROTATORIO y CALCULAR para probar el giro que previamente especificamos.
2DO MECANISMO (MEJORA)
Por medio de la mejora que nosotros creamos se puede limpiar por completo la ventana la cual tiene medidas de 103cm x 47cm.
Para el segundo mecanismo lo primero que hircismo fue sacar los grados de libertas. Nótese que tiene los mismos grados de libertar que en el primer mecanismo.
Número de enlaces L=4Número de articulaciones completas J1=4Número de medias articulaciones J2=0
Númerode grados de libertad=3 (L−1 )−2J 1−J2Númerode grados de libertad=3 ( (4 )−1 )−2 (4 )−(0 )Númerode grados de libertad=1=Mecanismo
La base de la ventana base es fija identificadas por el número 1, el balancín de color rojo número 2, la biela de color rosado número 3 y la manivela de color verde con el número 4. Esta es la idea básica de nuestro mecanismo fig.6.
Figura 6. Idea básica de la mejora del limpiador de 120 °.
Este mecanismo al igual que el anterior también es de biela-balancín como se muestra a continuación:En nuestro caso ocupamos las siguientes medidas:
L= 103 cmS= 51.5 cm
10

Q= 103 cmP= 47 cm
L+S=103 cm+51.5cm=154.5cmQ+P=103 cm+47cm=150cm
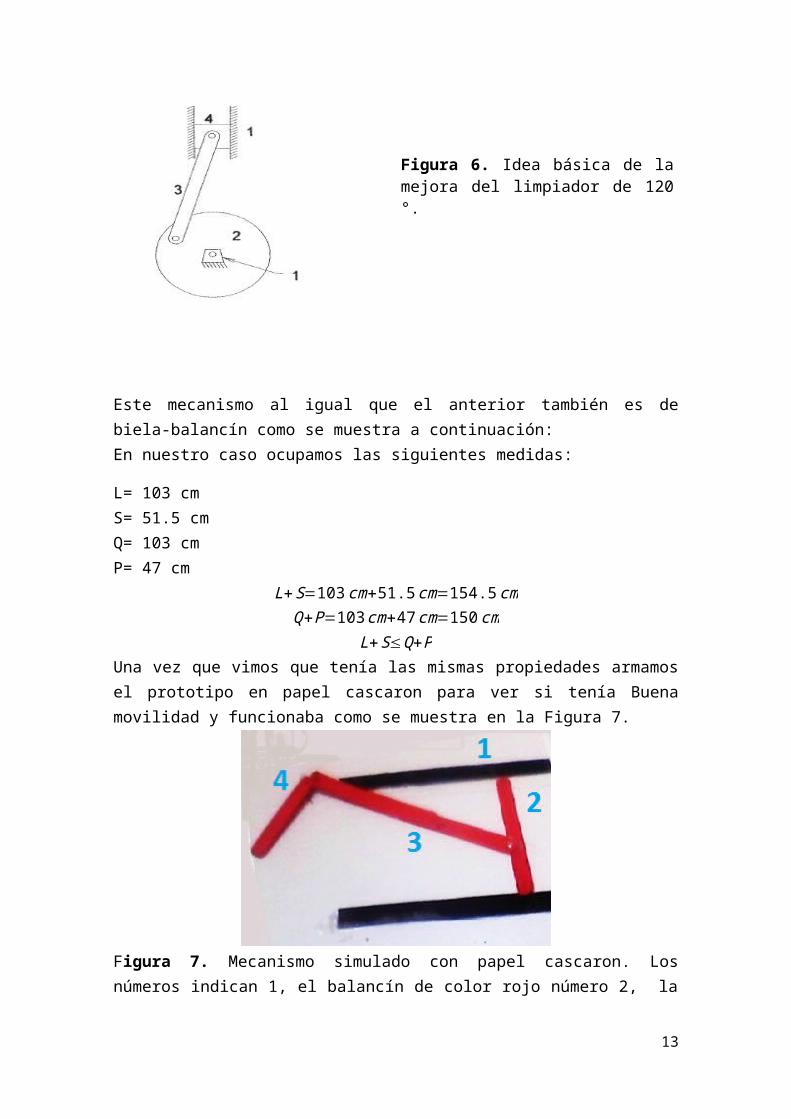
L+S≤Q+PUna vez que vimos que tenía las mismas propiedades armamos el prototipo en papel cascaron para ver si tenía Buena movilidad y funcionaba como se muestra en la Figura 7.
Figura 7. Mecanismo simulado con papel cascaron. Los números indican 1, el balancín de color rojo número 2, la biela de color rosado número 3 y la manivela de color verde con el número 4.
Como el mecanismo funciono correctamente en el papel cascaron pasamos a simularlos en Solid Works. El principio para hacer este nuevo mecanismo fue el mismo que en el anterior pero la única diferencia fue al hacer la ventana la cual se realizó de la siguiente manera:
Se realizó el vidrio de la ventana (figura 8) haciendo un cuadrado 104cm x 48cm y después extruirla a 1cm. Nótese que la medida de la ventana se aumenta un centímetro para después insertarla en el marco.
Figura 8. Vidrio. Vidrio de la ventana echa por medio de un cuadrado extruido
11
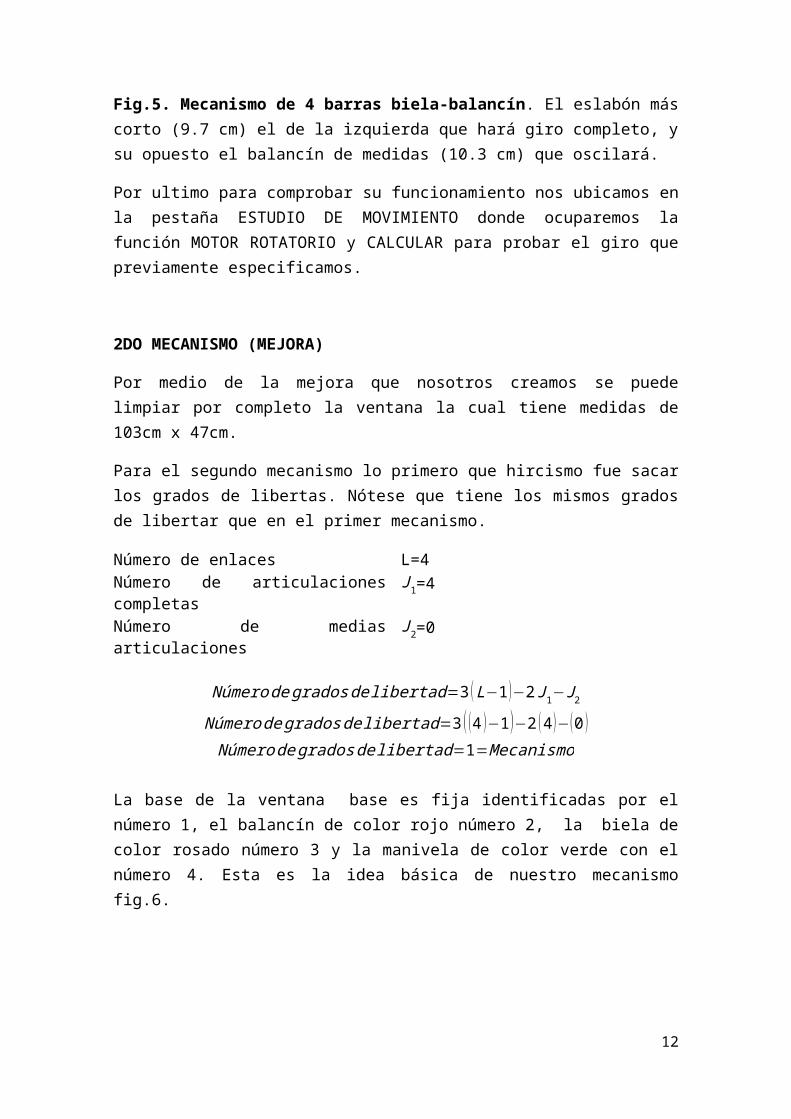
Figura 9.Estructura principal del marco.
Después de realizo el marco (Figura 9) con dos centímetros más grande en las anteriores medidas, extruimos a 2 cm y después se procede a hacer una perforación para que entre la ventana a 1 cm lado por lado.Realizamos unos pernos que sirvan de tope para que el balancín no se desvié de la ventana cada uno mide 1cmx47cm Figura 10.
Figura 10. Topes de la ventana
Finalmente se arma el circuito con las barras S Y L (LA MAS LARGA Y LA MAS CORTA) las cuales miden 103cm y 51.5cm respectivamente las cuales se realizaron como se mostró en el primer mecanismo. El mecanismo queda como se muestra ne la Figura 11.
Figura 11. Biela-balancín (mejora): diseño de un mecanismo para limpiar un vidrio.
DISCUSIÓN DE RESULTADOS
La realización de esta práctica nos permite conocer realmente cómo funcionan los mecanismos a tal punto de reconocer cada parte del sistema y la función que realizan individualmente, de igual forma ahora quedan más claros conceptos como manivela o balancín que anteriormente no eran tan evidentes.
12
CONCLUSIÓN GENERAL
El proyecto realizado que incluye tanto la práctica como el presente reporte han logrado que adquiramos un gran conocimiento en análisis de mecanismos puesto que nos hemos llevado conceptos importantes y experiencia para realizar la práctica de uno de los mecanismos más sencillos conocido como de 4 barras.
REFERENCIAS BIBLIOGRÁFICAS
ROBERT L. NORTON. (2005). Diseño de maquinaria. México DF: McGraw-Hill. Páginas 14 - 56 capítulo cinemática de mecanismos.
RICHARD G. BUDYNAS y J. KEITH NISBETT. (2008). Diseño en ingeniería mecánica. México DF: McGraw- Hill. Páginas 30-73 capítulo mecanismo de 4 barras.
HERNÁNDEZ, ALFONSO (2004). Cinemática de mecanismos. Análisis y diseño. México DF: Síntesis páginas 10-30..
13