ceniúef - cenidet - centro nacional de investigación … · 2014-02-13 · "diagnÓstico de...
TRANSCRIPT
SEP SElT DGlT
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO
Ceniúef
"DIAGNÓSTICO DE FALLAS EN UN MOTOR DE CORRIENTE DIRECTA UTILIZANDO EL MÉTODO DEL BOND GRAPH"
T E S I S
PARA OBTENER EL GRADO DE : MAESTRO EN CIENCIAS EN INGENlERíA ELECTRÓNICA
P R E S E N T A : BRIAN MANUEL GONZÁLEZ CONTRERAS
DIRECTORES DE TESlS
DR. LUIS GERARDO VELAVALDÉS DR. GERARDO VICENTE GUERRERO RAMíREZ
CUERNAVACA, MORELOS Noviembre del 2002.
0 2 - 0 7 9 3 CENIDET
/ g N W l DE INFORMACION
A C ~ E M I A DE LA MAESTRÍA EN ELECTRONICA FORMA R11
ACEPTACION DEL TRABAJO DE TESIS
Cuernavaca, Mor.
Dr. Jesús Arnoldo Bautista Corral Director del cenidet Presente
At’n. Dr. Enrique Quintero-Mármol Márquez Jefe del Depto. de Electrónica
Después de haber revisado el trabajo de tesis titulado: “Diagnostico de Fallas en un Motor de Corriente Directa utilizando el Método del Bond-Graph”, elaborado por el alumno Brian Manuel González Contreras, bajo la dirección del Dr. Luis Gerardo Vela Valdés y del Dr. Gerardo Vicente Guerrero Rarnírez, el trabajo presentado se ACEPTA para proceder a su impresión.
A T E N T A M E N T E
M.I. Marino Sánchez Parra
C.C.P.: Dr. Marco Antonio Oliver Salazar / Pdte. de la Academia de Electrónica Lic. Olivia Maquinay Diaz / Jefa del Depto. de Servicios Escolares Expediente.
INTERIOR INTERNADO PALMIRA S/N. COL, PALMIRA, A.P. 5-164. CP. 62490, CUERNAVACA. MOR. - MÉXICO TELS. (7771 312 23 14.318 77 41. FAX (777) 312 24 34 EMAIL [email protected]
cenidet
Cuernavaca, Morelos
Ing. Brian Manuel González Contreras Candidato al grado de Maestro en Ciencias en Ingeniería Electrónica Presente
Después de haber sometido a revisión su trabajo final de tesis titulado: “Diagnostico de Fallas en un Motor de Corriente Directa utilizando el Método del Bond-Graph”, y habiendo cumplido con todas las indicaciones que el jurado revisor de tesis le hizo, le comunico que se le concede autorización para que proceda a la impresión de la misma, como requisito para la obtención del grado.
Reciba un cordial saludo.
A T E N T A M.E N T E
v> ’ Dr. Enrique Quintéro-Mármol Márquez Jefe del Depto. de Electrónica
C.C.P. expedjente.
INTERIOR INTERNADO PALMIRA S/N. COL, PALMIRA , A.P. 5-164. CP. 62490. CUERNAVACA. MOR. - MÉXICO TELS. (777) 312 23 14.318 77 41. FAX (777) 312 24 34 EMAlL [email protected]
Agradecimientos A mi familia, por el apoyo total que siempre me han dado.
A mis asesores: Dr. Luis Gerardo Vela Valdés y Dr. Gerardo Guerrero Ramírez por su tiempo, dedicación y paciencia que me otorgaron para el desarrollo de esta tesis.
A mis revisores: Dr. Alejandro Rodriguez Palacios, M. en C. Marino Sánchez Parra y M. en I. Pedro Rafael Mendoza Escobar, por sus comentarios y consejos acertados, que contribuyeron al buen desarrollo de esta tesis.
A1 Dr. Didier Theilliol, Maestro de Conferencias de la Universidad Henri Poincaré, Nancy I en la ciudad de Nancy, Francia; por sus valiosos comentarios durante el desarrollo de esta tesis.
Al Consejo Nacional de Ciencia y Tecnología (CONACYT) y a la Secretaría de Educación Pública (SEP), por el apoyo económico otorgado para poder dedicarme al desarrollo de este proyecto.
A todo el Centro Nacional de Investigación y Desarrollo Tecnológico (Cenidet), por ser el ambiente de desarrollo de esta etapa profesional de mi vida, y al personal administrativo y profesional que lo integra, por su entrega.
A todos ... GRACIAS.
Contenido Página
... Lista de tablas ....................................................................................................... 111
Lista de figuras ..................................................................................................... iv
., Introduccion ......................................................................................................... 1
1. Diagnóstico de fallas y Bond Graph
1.2 Planteamiento del problema ........ .............................. 3 .................................... 5
1.3 Diagnóstico de fallas ............................... 1.3.1 Definiciones .......................
.................
2. El motor de corriente directa ., 2.1 htrüducc1on .................................................................................... 27 2.2 Generalidades del motor de cd .......... 2.3 Modelo convencional del motor de c 2.4 Modelo del motor de cd en BG ......... 2.5 Tipos de fallas en un motor de cd ..... 2.6 Simulación de fallas ........... 2.7 Conclusión ...
3. Diagnóstico de fallas mediante Bond Graph
3.7 Gráfico temporal ....... ..................... 55
i
4. Diagnóstico en el motor de cd , - a-
4.1 introducción. ............................ 4.2 Obtención d
4.6 Resumen de fallas 4.7 Conclusión ...
........................ 73
. . 5. Diagnóstico en el conjunto convertidor-motor de cd
5.1 introducción. .............................................................. 5.2 El convertido .................................
5.4 El convertidor reductor'(mode1o en BG) ........................................ 78 5.5 El convertidor de puente 5.6 Gráfico causal del conve
5.8 El conjunto convertidor-motor de cd
5.3 El convertidor reductor (modelo convencional) ............................. 77
.......... 5.7 Árbol de fallas del convertidor ....................... ~ ........ 83
5.8.1 Gráfico causal.. ............................. 5.8.2 Árbol de fallas. ............................
5.9 Falla en el conjunto conve 5.10 Resumen de fallas ................. 5.1 1 Conclusión ................... ...................... 92
............... ......................
Conclusiones ........................................................................................................ 94
. . . Anexos Apéndice A. Análisis de señales .......................................................... 98 Apéndice B. Gráficos temporales ........................................................ 104 Apéndice C. Árboles de fallas del conjunto convertidor-motor de cd 106 Apéndice D. Filtro de variables de estado .......................................... 107 Apendice E. Glosario .......................................................................... 109 I .
Referencias bibliográficas .................................................................................. 1 1 O
Lista de tablas Capítulo 1
Tabla 1.1. Eventos de fallas ................. Pagina
Tabla 1.2. Características de fallas ..... Tabla 1.3. Tipos de fallas ..........
.....................
Tabla 1.4. Elementos del Bond Graph. Tabla 1.5. Equivalencias entre dominios ..................................................................... 11 Tabla I . 6. Momentos y desplazamientos generalizados .............................................. 19
Capítulo 2
Tabla 2.1. Valores de los parámefros del motor de cd ................................................ 33 Tabla 2.2. Parámetros de falla y porcentaje de cambio ......................... Tabla 2.3. Tipo de falla en el tiempo (A= ilO%) ................................... Tabla 2.4. Tipo defalla en el tiempo (A= -10%) ...................
Capítulo 3
Tabla 3. I Operaciones cualitativas. ............. Tabla 3.2 Antecedentes y consecuentes ................................................
......... 49 ......... 54
......................................
Capítulo 4
Tabla 4.1. Antecedentes y consecuentes de motor de cd ........................ Tabla 4.2. Comparación de valores de salida según varía K ................ Tabla 4.3. Firmas del motor de cd ........................... ........................... Tabla 4.4. Firmas de los elementos del conjunto de fallas .................... Tabla 4.5. Resumen de fallas para el motor de cd .................................
Capítulo 5
Tabla 5.1. Antecedentes y consecuentes del convertidor buck ......... Tabla 5.2. Firmas de cada pardmetro para el ejemplo convertido Tabla 5.3. Resumen de fallas para el conjunto convertidor-motor
... 111
Lista deflguras _L
Capítulo 1 Pigina
Figura 1.1. Comportamiento en ei tie Figura I . 2. Esquema de diagnóstico
Figura 1.4, Relación energética en
Figura 1.6. Simplificación de enla Figura 1.7. Sistema de dos tanque
Figura 1.9 Pasos en la generación del Figura 1.10. Asignación de causa
Figura 1.3. Esquema de detección de fallas ...
Figura 1.5. Causalidad entre elementos en BG ......
Figura 1.8. Eliminación de enlaces ......
.................................... 18
Capítulo 2
Figura 2.1. Clasificación de los motores de corriente direcia ................................... 28 Figura 2.2. Motor de cd con imanespermanentes Figura 2.3. Motor de cd excifación independien .......................... 30 Figura 2.4 . Diagrama de bloques del motor de Figura 2.5. (De izq-der. y arriba-abajo). Curva par-vel., curva pot.-corriente,
................... curva par-corrien te, curva velocidad-corriente 32 Figura 2.6. Señales caracteristicas del motor de cd. .......................... 33 Figura 2.7. El motor de cd referenciado ........ ..................................... 34
Figura 2.10. Simplificación del gráfico ........ ...................................... 35
Figura 2.8. Enlaces depotencia entre elementos del motor de cd ............................. 34 Figura 2.9. Enlaces depotencia sin referencias generales .......................................... 35
Figura 2. I I . Terminación del modelo en BG Figura 2.12. Modelo en BG del motor de c Figura 2.13. Diagrama de bloques del motor de cd apartir Figura 2.14. Modelo en paralelo para obtención de residuos Figura 2. I S . Modelo de introducción de falla ....................... Figura 2.16. Falla permanente sin relación diferencial.
Capítulo 3
Figura 3.1. Modelo del sisrema de diagnóstico ........................................................... 44 Figura 3.2. Bloques del método de diagnóstico propuesto .......................................... 45 Figura 3.3 Funciones del módulo de evaluación, decisión y diagnóstico ................... 46 Figura 3.4. Generación de residuos mediante un modelo en paralelo ........................ 41 Figura 3.5 Sistema de dos tanques .............................................................................. 5 1
iv
Figura 3.6. Nodos de referencia en la creación del gráfico causal ............................ s 1 Figura 3.7. Gráfico causal del ejemplo del sistema de dos tanques ........................... 52 Figura 3.8. Comportamiento temporal posterior a una falla ..................................... 57 Figura 3.9. Robustez en un modelo de diagnóstico ..................................................... 58 Figura 3.10. Comportamiento de señal de salida ante una falla ................................ 58 Figura 3.11. Algoritmo de detección de fallas en la etapa de generación residual .... 59
Capítulo 4
Figura 4.1. Bloques para construir el gráfico causal del motor de cd ....................... 63 Figura 4.2. Gráfico causal del motor de cd ........ ....................... 63 Figura 4.3. Generación de un árbol de fallas ...................... 64 Figura 4.4. Árboles de fallas para las variables e3 y ea .............................. 66
............................................ 68 Figura 4.6. Generación del gráfico temporal. ............................................................. 69 Figura 4. 7. Gráfico temporal para K .......................................................................... 69 Figura 4.8. Mitodo de diagnóstico propuesto desglosodo .......................................... IO
Figura 4.10 Gráfico temporal delparámetro J.... ................................................ 12
Figura 4.5. Ramas afectadas por K
Figura 4.9. Residuos y señales de salida ante una falla en R,. ................................... I 1
Figura 4. I 1 Señales de salida de la corriente y velocidad ...................................
Capítulo 5
16 Figura 5.2. Converlidor reductor (buck) ........... ..................................... 77
..................................... 18 Figura 5.4. Modelo del convertidor buck en BG ......................................................... 19 Figura 5.5. Convertidor de puente completo ............................................................... 80
Figura 5.7. Operación en un cuadrante ............................. Figura 5.8. Operación en un cuadrante simplijicado ........ Figura 5.9. Bloques del gráfico causal para el eo Figura 5.10. Gráfico causal del convertidor ........ Figura 5.11. Construcción del árbol de falla del
Figura 5.13. Trayectoria de energía en el conve
Figura 5.15. Árbol de fallas para esi y eJ', co Figura S.16. Modelo del conjunto convertido Figura 5.1 7. Residuos y señales de salida an Figura S.18. Gráficos temporales (o)para R,. @)para J. @)para K, @!!para m..... 90
Figura 5.1. Voltaje de salida de un Convertidor
Figura 5.3. Obtención del modelo del convertidor e
Figura 5.6. Cuadrantes en que puede operar un convertidor de puente completo ..... 81
...............................
Figura 5.12. Árboles de fallas parah. .................
Figura 5.14. Gráfico causal del convertidor-motor de cd .............
Figura f. 19. Derivadas y magnitudes con falla en m, de (a) i, y (b) O, .................... 9 1
V
Anexo
Figura CI . Árboles dejallas de las variables e3 y ea del conjunto "'
convertidor-motor de cd ...................................... : ................................... 106 Figura D.I. Filtro de variables de estado (FVE) .... ~ .................. : ............................... 101 Figura D.2. Implementación del los FVE en el modelo de simulación ..................... 108
...
vi
Introducción En general, el funcionamiento de un proceso de cualquier tipo, en donde se demanda la
obtención de un resultado 0 producto final, requiere de un diseño del sistema de control capaz de mantener en operación continua y confiable al proceso, bajo las condiciones normales para las que fue diseñado. Este sistema de control se basa en las características propias del proceso, las cuales no vanan debido a un cambio en los valores nominales de los parámetros que lo describen (conwol estático); o puede adaptarse según varíen estos parámetros (control dinámico, adaptable); el sistema de control también puede depende de la modificación de la entrada.
Físicamente, todos los elementos del proceso son susceptibles de modificar sus valores nominales por desgaste, uso y ambiente, provocando un daño en alguna parte de éste, y no sólo en el proceso sino en toda la planta, incluido el sistema de control. Las fallas en los sistemas son caracterizadas por cambios en los valores nominales de los parámetros componentes. Desde un punto de vista físico, los cambios en los valores de los parámetros y estados físicos del modelo, corresponden a cambios en los valores nominales de los coeficientes fisicos, sensores y actuadores del proceso.
Una de las razones por lo cual se desea detectar una falla a tiempo, es la de aplicar el programa de mantenimiento, que es de dos tipos: el correctivo y el preventivo. El primero entra en acción para restablecer la operacion de la planta o proceso cuando ésta se ha detenido por algún desperfecto: involucra pérdida de tiempo y dinero, y es un estado indeseado en cualquier industria. Se desea que todos los procesos de la planta se encuentren siempre en el programa de mantenimiento preventivo, con lo que se asegura una operación continua, conservando en los valores nominales a cada elemento o dispositivo que conforman al sistema.
Es necesario supervisar los procesos por medio del uso de sistemas de monitoreo que cubran de forma automática cada una de las áreas de la planta registrando cada variación de los procesos. Es deseable establecer una metodología para lograr un efectivo diagnóstico de fallas capaz de ser utilizado en procesos conformados por subsistemas de naturaleza distinta, y que sea lo más general posible, con el fin de permitir flexibilidad en la aplicación.
Esta trabajo de tesis presenta un método de diagnóstico que utiliza la teoría de modelado energético del Bond Graph, gráficamente representativo y basado en enlaces energéticos generalizados, que permite aplicar en forma unificada los análisis cualitativo y cuantitativo en un solo modelo de diagnóstico.
El objetivo de este trabajo es aplicar, teniendo como caso de estudio al conjunto convertidor-motor de comente directa, el diagnóstico de fallas mediante este enfoque energético, como una propuesta para aplicación posterior a sistemas más complejos y no lineales, mostrando para ello un desarrollo secuencia1 mediante el uso de elementos del Bond Graph.
AI tenor de este objetivo, se desarrolla un método de diagnóstico ordenado en bloques Y que utiliza herramientas cualitativas, basadas en el uso de elementos del Bond Graph que han desarrollado otros investigadores, pero que aquí se ordenan de manera que permita una aplicación secuencial, que incluye un último bloque que decide dónde'ha sido'la falla de manera directa. Dicho bloque y los criterios usados para su aplicación, constituyen la aportación de este trabajo.
El contenido de este documento está dividido en cinco capítulos que se describen a continuación.
En el'capítulo 1 se presentan las causas que motivan el desarrollo de esta tesis así como su planteamiento, para después establecer las bases de la teoría del Bond Graph; postenomente se mencionan las definiciones y funciones básicas del diagnóstico de fallas y las formas mas generales de detección y aplicación en un panorama general. -'
En el capítulo 2 se presenta la teoría de funcionamiento y se obtiene el modelo del motor de comente directa, además, se presentan los modelos de variables de estado del modelo convencional y el obtenido'del modelo en Bond Graph, se validan'los modelos y se presentan simulaciones de su operación normal. Se da una introducción sobre la inyección de las.fallas en el modelo y las posibles fallas que pueden presentarse en el motor.
. . En el capítulo'3 se presenta el método propuesto de diagnóstico que utiliza los elementos
del Bond Graph como elemento básico para establecer un diagnóstico basado en valores cualitativos y causalidad con los que se obtienen los conjuntos de hipótesis de falla y se reducen en un análisis posterior, también cualitativo.
En el capítulo 4 se aplica el método propuesto al motor de corriente directa y se muestran . , los resultados de simulación.
.. En el capítulo 5 se aplica el método de diagnóstico propuesto al conjunto convertidor-
motor de comente directa, que es el caso de estudio completo'de esta tesis, y se muestra la efectividad del método, así como sus virtudes y limitaciones.
Se finaliza con un apartado en el que se presentan las conclusiones obtenidas, así como el panorama del trabajo en el futuro y los trabajos que se sugieren para tratamiento ulterior.
': 3.
Para la mejor comprensión y complementación del Trabajo se presenta un apartado de , . anexos.
2
Capítulo i Diagnóstico de fallas y Bond Graph
. 1.1 Introducción
La supervisión es un medio para garantizar el buen funcionamiento de los procesos industriales. El diagnóstico de fallas es una parte de la supervisión, que tiene la finalidad de encontrar la causa del mal funcionamiento en el sistema, cuando éste opera en forma anormal.
En este capítulo se presentan las definiciones básicas del diagnóstico y del Bond Graph. En la sección 1.2 se presenta el planteamiento del problema, objetivos, alcance del trabajo y estado del arte para abordar el tema del presente trabajo de tesis, que se enfocas la obtención de un método de diagnóstico capaz de aplicarse en forma general a cualquier sistema físico, aprovechando las propiedades del Bond Graph para integrar las características anteriores.
En la sección 1.3 se abordan las definiciones del diagnóstico de fallas, así como el esquema de base y características principales de los métodos de detección basados en el modelo del sistema.
En la sección 1.4 se presentan la teoría del Bond Graph, elementos básicos y reglas de construcción del modelo. Se muestra un ejemplo de modelado de un sistema hidráulico aplicando tales reglas.
Finalmente, en la sección 1.5 se presentan las conclusiones de este primer capitulo
1.2 Planteamiento del problema
Dentro de los procesos industriales automáticos se encuentran como elementos fundamentales los motores eléctricos, cuyo consumo energético es elevado. Su configuración y diseño de operación depende de la aplicación. Los motores de comente directa (cd) pese a tener desventajas respecto a los de corriente alterna (ca) tienen aun una gran variedad de aplicaciones. Su amplio uso se ve reflejado en el consumo de energía eléctrica que realizan, alcanzando hasta un 40% del porcentaje consumido por las máquinas eléctricas en general, que es de un 65% de toda la producción eléctrica total ICha001.
Desde el punto de vista de investigación, también sobresalen los motores de corriente directa como un sistema de pmeba debido a sus características lineales y acoplamiento eléctrico- mecánico-magnético de sus componentes, permitiendo concluir una serie de observaciones sobre métodos diversos de diagnóstico y detección de fallas.
3
L~ mayoría de los procesos físicos, como el de los motores de cd, están constituidos Por una combinación de sistemas 0 componentes eléctricos, mecánicos, neumáticos, hidráulicos, etc.
Es necesario establecer una metodología para lograr un efectivo diagnóstico de fallas capaz de ser utilizado en sistemas conformados por subsistemas de naturaleza distinta, denominados sistemas hibridos. Los modelos descriptivos de un proceso encontrados en 10s procesos industriales son generalmente de dos tipos:
1) balances de materia o energía establecidos desde el diagrama de bloques del proceso y
2) ecuaciones diferenciales lineales o no lineales complejas, escritas por los químicos o hojas de flujo del mismo, que integran las reglas de producción; y
físicos involucrados en ello.
En cualquier caso, se dispone de datos asociados a conceptos más energéticos que de tipo matemático que describen exactamente a cada variable involucrada (MGOO], (Li901.
Aquí se surge como una solución para aplicar el diagnóstico de fallas a sistemas híbridos, el uso de enlaces de energía desde un punto de vista general. Para abordar el modelado de esta combinación de elementos, el Bond Graph es una herramienta útil,'ya que presenta las siguientes características:
El modelado de los sistemas, desde un punto de vista del flujo de energía entre los componentes, con un uso finito de elementos gráficos. La analogía fisica entre componentes mecánicos,' eléctricos, hidráulicos, etc., facilita la combinación de estos elementos en un modelo integrado, cuyo estudio se hace sistemático.
Desde un punto de vista del flujo de energía, los componentes de los sistemas y los fenómenos 'físicos pueden ser clasificados en cinco categorías mediante elementos del Bond Graph: elementos que conservan o almacenan energía, elementos que disipan energía,fuentes de energía, elementos de conversión de energía (transformadores y giradores) y elementos de unión (serie, paralelo).
'
Por lo general, los estudios sobre diagnóstico de fallas contemplan más la parte cuantitativa; los análisis cuantitativo y cualitativo se toman como métodos separados, o dejan ciertos huecos entre ellos, como se indican en [IB96], (Pat971, IChP99). Estos huecos tienen que ver con los datos y precisión que requiere el análisis cuantitativo siendo muy rígido, mientras que el análisis cualitativo requiere más conocimientos.
Es aquí donde se muestra útil el uso del Bond Graph en el diagnóstico de fallas, ya que es
Aplicar las reglas de causalidad formales del Bond Graph. Representar cualquier sistema con ,un número finito y bien definido de elementos simbólicos. indicar la relación directa entre los elementos componentes sin perder el sentido fisico de éstos. Establecer relaciones dinámicas Y estáticas claras. de modo secuencial.
posible unir la parte cualitativa con la cuantitativa, porque permite:
1 2
3
4
4
5 Hacer clara la relación entre componentes y su relación mutua debido al conjunto de ecuaciones derivadas ordenadas en antecedentes y consecuentes.
6 Aplicar las reglas de los métodos cualitativos para detección. 7 Derivar las ecuaciones dinámicas necesarias para realizar un análisis cuantitativo. 8 Aplicarlo a sistemas lineales y no lineales.
1.2.1 Objetivos
El objetivo general de este trabajo de tesis es apIicar el diagnóstico de fallas al conjunto convertidor-motor de comente directa utilizando el enfoque del Bond Graph para la representación del modelo. La aplicación del diagnóstico se refiere a realizar un análisis utilizando las variables y elementos del Bond Graph, para obtener, por medio de una manera secuencial, una sene de reglas generales que permitan definir inequívocamente, la falla en un momento dado en el sistema, es decir, diagnosticar. Para ello se usa como caso de estudio el conjunto convertidor-motor de comente directa.
Como objetivos particulares se tienen:
1) Definir un protocolo de fallas que permita simular, en forma realista, las fallas en el
2) Establecer un modelo en Bond Graph del motor de corriente directa, así como del
3) Establecer y fundamentar un método de diagnóstico, utilizando elementos del Bond
4) Probar el método de diagnóstico en el caso de estudio convertidor-motor de comente
conjunto convertidor-motor de comente directa.
convertidor de comente directa.
Graph, mediante un análisis cualitativo.
directa, simulando las fallas asociadas al modelo.
1.2.2 Alcance del trabajo
1. Se presentarán las bases del modelado general de los sistemas físicos, basándolos en enlaces energéticos entre los parámetros y subsistemas componentes del sistema completo, según la teoría de modelado del Bond Graph.
2. Se desarrollará un modelo simplificado que represente al sistema convertidor-motor de cd (excitación independiente y sin carga) basado en Bond Graph. Se aprovecharán las ventajas de este método para usarlas en la detección de fallas.
3. Se usará el esquema de diagnóstico de Isermann (generación, evaluación, decisión) [lse84]. Se obtendrán los valores de parámetros y señales de entrada y salida, a partir de los cuales se generarán los residuos respectivos para diagnóstico.
4. Se simularán los modelos (en modo sin fallas y con fallas) en Matlab0 tanto del modelo clásico del motor como del elaborado en BG. Asimismo el modelo del convertidor de comente directa se analizará en los mismos términos. Ambos casos se analizarán sin carga
5. Se defuiirá una estrategia de diagnóstico a partir de elementos del Bond Graph, planteando un método de obtención del modelo energético dado un sistema cualquiera, asi como de un método de diagnóstico.
DIAGNÓSTICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
1.2.3 Estado del arte I ,
Los estudios y aplicaciones usando Bond Graph se presentan en varios documentos de investigación, principalmente enfocados al modelado, al control y al diagnóstico para simulación de varios sistemas. Con el objeto de utilizar una simulación realista' en esta tesis, se recopiló información relacionada a trabajos sobre diagnóstico, utilizando métodos distintos, en los que se usan motores de cd y asimismo valores comunes de falla en operaciones industriales. lsermann y Ball6 en [IB961, presentan una serie de métodos aplicados a motores de comente directa con los fines mencionados. Los tipos de fallas indicados en esta sección se definen en la sección 1.3.2.
Es muy importante aclarar, que un estudio sobre todas las fallas y sus combinaciones posibles de un motor sena muy extenso y extenuante, la literatura al respecto así lo muestra, debido a que las fallas aditivas (relacionadas a sensores ' y actuadores) y multiplicativas (relacionadas a los coeficientes,físicos) da un número grande de combinaciones de fallas. En la sección 1.3.2 se habla sobre los tipos de fallas que puede haber en los sistemas.
Todos los documentos revisados aquí, que tratan con motores de comente directa, coinciden en los siguientes puntos:
1. Las fallas son Únicas, es decir, son fallas que se presentan sin tener correlación con alguna otra falla, así como la ausencia de concatenación de una falla a otra, o sea, sin que una falla derive en otra distinta.
2. Las fallas más comunes son de cortocircuito y circuito abierto en los devanados de armadura (R, y Lo), los sensores se dañan o descalibran, la carga cambia abruptamente, la inercia (.I) se modifica por desgaste de la flecha.
3. Las fallas se presentan después de que se ha alcanzado el estado estable de operación del motor.
4. Se proporcionan los valores nominales de los parámetros del sistema.
Alexandru et al. en [ACGOO] presenta un conjunto de residuos obtenidos bajo diferentes condiciones de operación del motor de comente directa, incluyendo la presencia o ausencia de fallas en un lado, presencia o ausencia del par de carga en el otro. Las señales de fallas y par de carga se eligen como se muestra a continuación. Cada señal está descrita por la cuádrupla {tipo, amplitud, tiempo inicial, tiempo final}, i, es la comente de armadura, p es el coeficiente de Gicción, a es la posición de la flecha, y Ues el voltaje de entrada:
-
Par de carga: {escalón, 2,0.1, -) {escalón, -2,0.1, -) (rampa, 2,0.1, O 14) {rampa, -2, 0.1, O 14)
Señales de falla en p, 1 , 0, U: {escalón, lo%, 0.1, -) {escalón, lo%, O 6, -} {escalón, 1 O%, I . 1 , -1
CAPiTULO I: DIAGNÓSTICO DE FALLAS Y BOND GRAPH
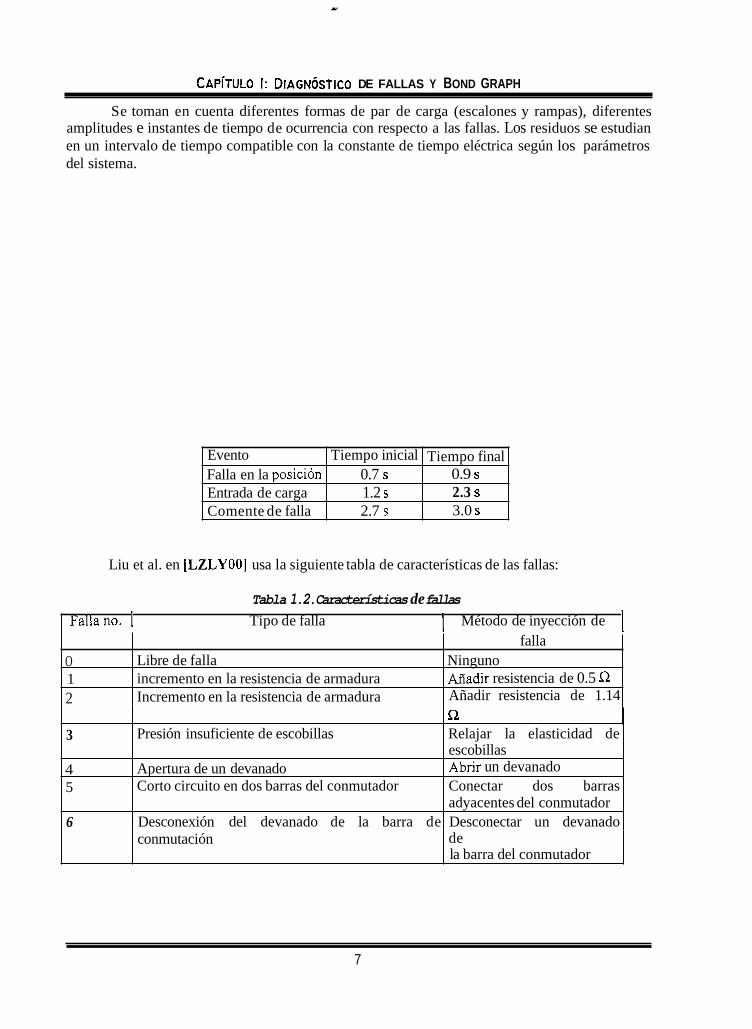
Se toman en cuenta diferentes formas de par de carga (escalones y rampas), diferentes amplitudes e instantes de tiempo de ocurrencia con respecto a las fallas. Los residuos se estudian en un intervalo de tiempo compatible con la constante de tiempo eléctrica según los parámetros del sistema.
Evento Tiempo inicial Falla en la posición 0.7 s Entrada de carga 1.2 s Comente de falla 2.7 s
Tiempo final 0.9 s 2.3 s 3.0 s
Liu et al. en [LZLYOO] usa la siguiente tabla de características de las fallas:
Tabla 1.2. Características de fallas
O 1 2
Fallano. I Tipo de falla I Método de inyección de I falla
Añadir resistencia de 0.5 R Añadir resistencia de 1.14
Libre de falla Ninguno incremento en la resistencia de armadura Incremento en la resistencia de armadura
3
4 5
6
n
escobillas Abrir un devanado
adyacentes del conmutador
Presión insuficiente de escobillas Relajar la elasticidad de
Apertura de un devanado Corto circuito en dos barras del conmutador Conectar dos barras
Desconexión del devanado de la barra de Desconectar un devanado conmutación
7
de la barra del conmutador
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
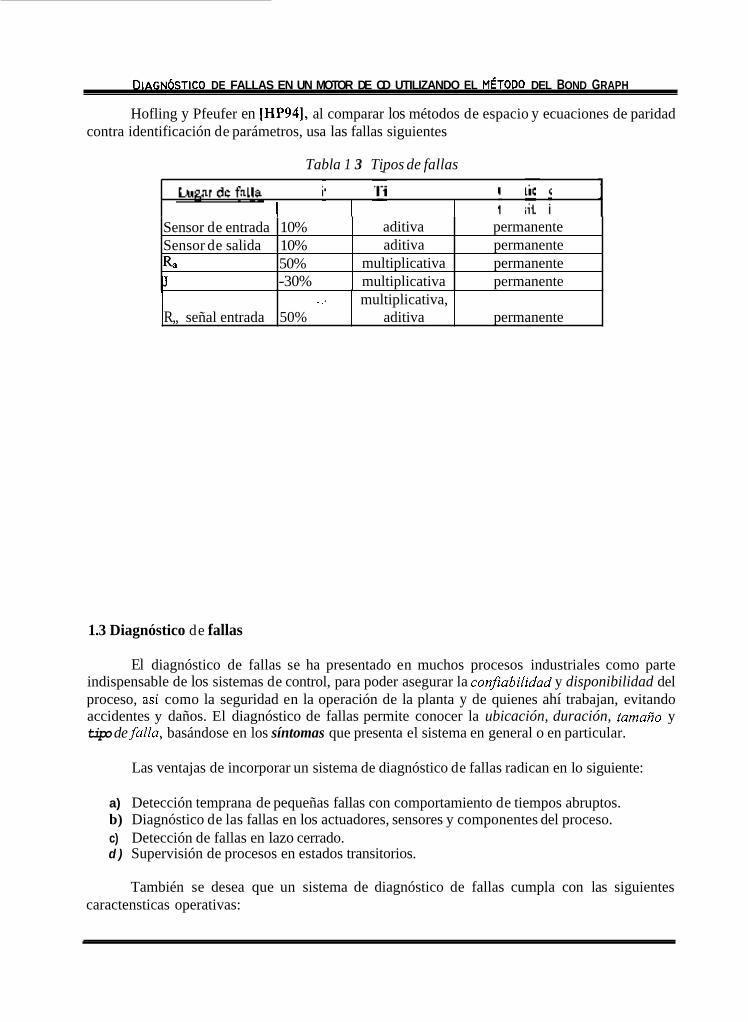
Hofling y Pfeufer en [HP94], al comparar los métodos de espacio y ecuaciones de paridad contra identificación de parámetros, usa las fallas siguientes
Tabla 1 3 Tipos de fallas
I transitorici Sensor de entrada 10% aditiva permanente Sensor de salida 10% aditiva permanente Ra 50% multiplicativa permanente
-30% multiplicativa permanente J R,, señal entrada
1.3 Diagnóstico de fallas
El diagnóstico de fallas se ha presentado en muchos procesos industriales como parte indispensable de los sistemas de control, para poder asegurar la confiabilidad y disponibilidad del proceso, así como la seguridad en la operación de la planta y de quienes ahí trabajan, evitando accidentes y daños. El diagnóstico de fallas permite conocer la ubicación, duración, fumaño y tipo de fallu, basándose en los síntomas que presenta el sistema en general o en particular.
Las ventajas de incorporar un sistema de diagnóstico de fallas radican en lo siguiente:
a) Detección temprana de pequeñas fallas con comportamiento de tiempos abruptos. b) Diagnóstico de las fallas en los actuadores, sensores y componentes del proceso. c) Detección de fallas en lazo cerrado. d ) Supervisión de procesos en estados transitorios.
También se desea que un sistema de diagnóstico de fallas cumpla con las siguientes caractensticas operativas:
~ ., multiplicativa, 50% aditiva permanente
CAPíTULO I: DIAGNÓSTICO DE FALLAS Y BOND GRAPH
e) Presentar un resultado de diagnóstico detallado, mostrando claramente la ubicación, lugar y tamaño de la falla.
f ) Presentar resultados en pocos segundos. g) No ser caro en implementación y que sus costos de operación sean bajos. h) Que el diagnóstico sea reproducible y objetivo.
El principal desarrollo de la detección y diagnóstico de fallas se dio en la década de los 70's del siglo pasado, pero en los 80's se establecieron bases más metodológicas para su aplicación y desarrollo académico e industrial. Los resultados de investigación dentro de los métodos de identificación y detección de fallas (fault detection and identification- FDI) han ganado amplia aceptación industrial. Hay una necesidad de aplicaciones reales con escenarios de falla genuinos y especificaciones de requerimientos más generales.
1.3.1 Definiciones
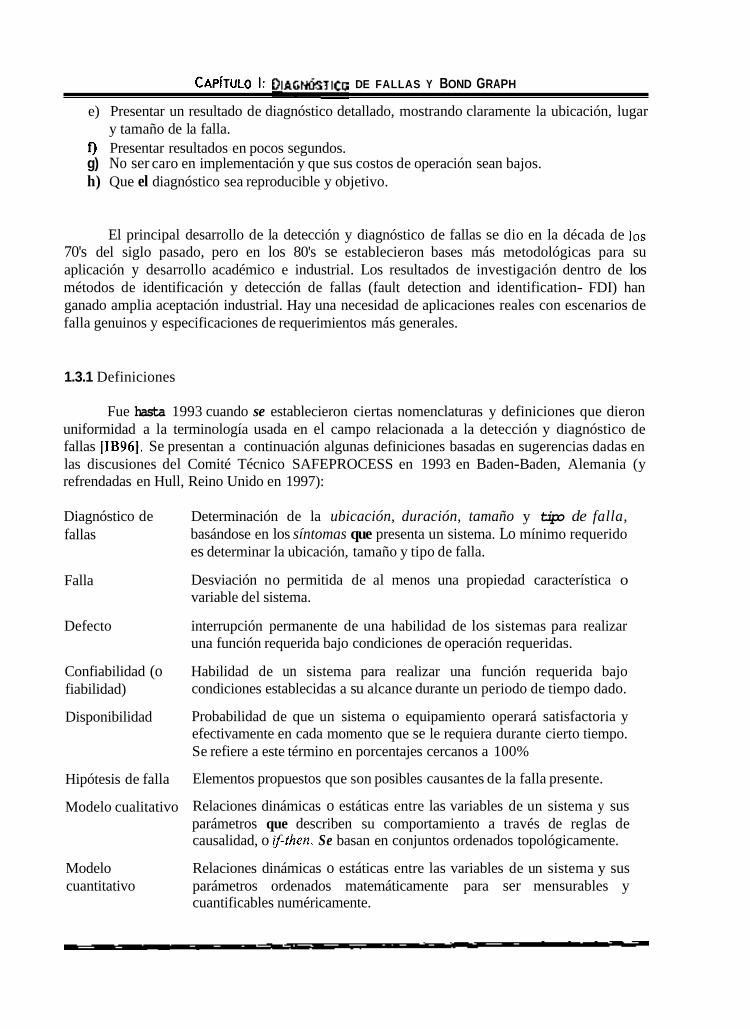
Fue hasta 1993 cuando se establecieron ciertas nomenclaturas y definiciones que dieron uniformidad a la terminología usada en el campo relacionada a la detección y diagnóstico de fallas [IB96]. Se presentan a continuación algunas definiciones basadas en sugerencias dadas en las discusiones del Comité Técnico SAFEPROCESS en 1993 en Baden-Baden, Alemania (y refrendadas en Hull, Reino Unido en 1997):
Diagnóstico de fallas
Falla
Defecto
Confiabilidad (o fiabilidad)
Disponibilidad
Hipótesis de falla
Determinación de la ubicación, duración, tamaño y tipo de falla, basándose en los síntomas que presenta un sistema. Lo mínimo requerido es determinar la ubicación, tamaño y tipo de falla.
Desviación no permitida de al menos una propiedad característica o variable del sistema.
interrupción permanente de una habilidad de los sistemas para realizar una función requerida bajo condiciones de operación requeridas.
Habilidad de un sistema para realizar una función requerida bajo condiciones establecidas a su alcance durante un periodo de tiempo dado.
Probabilidad de que un sistema o equipamiento operará satisfactoria y efectivamente en cada momento que se le requiera durante cierto tiempo. Se refiere a este término en porcentajes cercanos a 100%
Elementos propuestos que son posibles causantes de la falla presente.
Modelo cualitativo Relaciones dinámicas o estáticas entre las variables de un sistema y sus parámetros que describen su comportamiento a través de reglas de causalidad, o @then. Se basan en conjuntos ordenados topológicamente.
Modelo Relaciones dinámicas o estáticas entre las variables de un sistema y sus cuantitativo parámetros ordenados matemáticamente para ser mensurables y
cuantificables numéricamente.
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
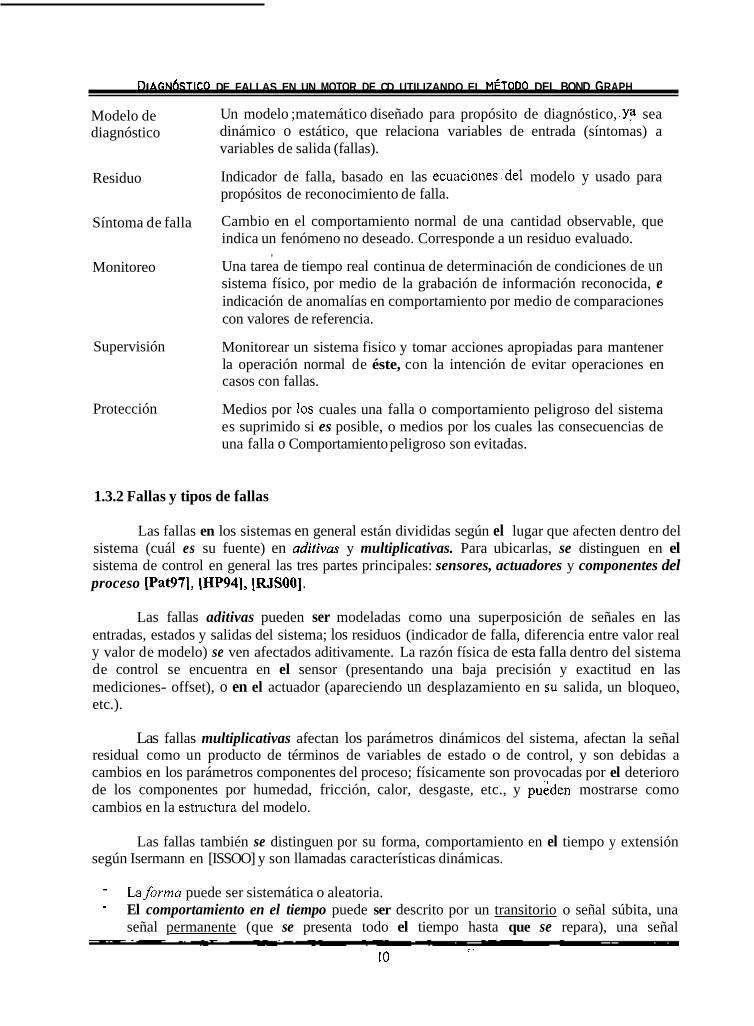
Modelo de diagnóstico
Residuo
Síntoma de falla
Monitoreo
Supervisión
Protección
Un modelo ;matemático diseñado para propósito de diagnóstico, .ya sea dinámico o estático, que relaciona variables de entrada (síntomas) a variables de salida (fallas).
Indicador de falla, basado en las ecuaciones'del modelo y usado para propósitos de reconocimiento de falla.
Cambio en el comportamiento normal de una cantidad observable, que indica un fenómeno no deseado. Corresponde a un residuo evaluado.
Una tarea de tiempo real continua de determinación de condiciones de un sistema físico, por medio de la grabación de información reconocida, e indicación de anomalías en comportamiento por medio de comparaciones con valores de referencia.
Monitorear un sistema fisico y tomar acciones apropiadas para mantener la operación normal de éste, con la intención de evitar operaciones en casos con fallas.
Medios por los cuales una falla o comportamiento peligroso del sistema es suprimido si es posible, o medios por los cuales las consecuencias de una falla o Comportamiento peligroso son evitadas.
,
1.3.2 Fallas y tipos de fallas
Las fallas en los sistemas en general están divididas según el lugar que afecten dentro del sistema (cuál es su fuente) en aditivus y multiplicativas. Para ubicarlas, se distinguen en el sistema de control en general las tres partes principales: sensores, actuadores y componentes del proceso (Pat971, lHP941, [RJSOOI.
Las fallas aditivas pueden ser modeladas como una superposición de señales en las entradas, estados y salidas del sistema; los residuos (indicador de falla, diferencia entre valor real y valor de modelo) se ven afectados aditivamente. La razón física de esta falla dentro del sistema de control se encuentra en el sensor (presentando una baja precisión y exactitud en las mediciones- offset), o en el actuador (apareciendo un desplazamiento en su salida, un bloqueo, etc.).
Las fallas multiplicativas afectan los parámetros dinámicos del sistema, afectan la señal residual como un producto de términos de variables de estado o de control, y son debidas a cambios en los parámetros componentes del proceso; físicamente son provocadas por el deterioro de los componentes por humedad, fricción, calor, desgaste, etc., y puiden mostrarse como cambios en la estruciura del modelo.
Las fallas también se distinguen por su forma, comportamiento en el tiempo y extensión según Isermann en [ISSOO] y son llamadas características dinámicas.
- -
Laforma puede ser sistemática o aleatoria. El comportamiento en el tiempo puede ser descrito por un transitorio o señal súbita, una señal permanente (que se presenta todo el tiempo hasta que se repara), una señal
s .
IO
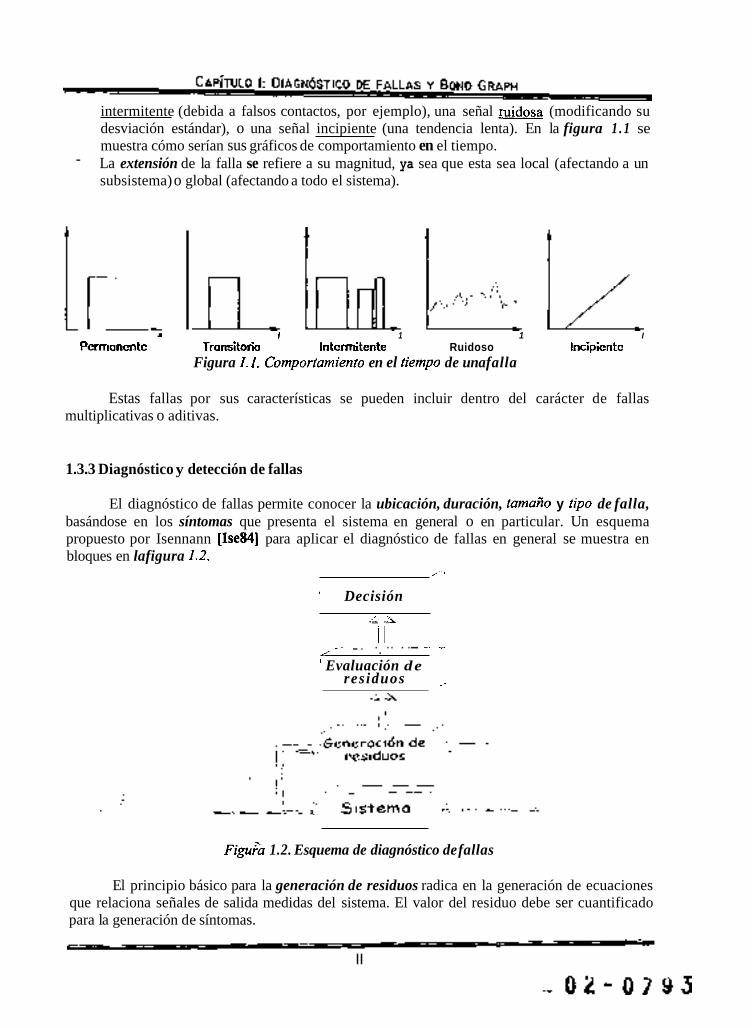
intermitente (debida a falsos contactos, por ejemplo), una señal niidosa (modificando su desviación estándar), o una señal incipiente (una tendencia lenta). En la figura 1.1 se muestra cómo serían sus gráficos de comportamiento en el tiempo. La extensión de la falla se refiere a su magnitud, ya sea que esta sea local (afectando a un subsistema) o global (afectando a todo el sistema).
-
Pcrrnanentc I 1 1 I
iransitoria lntcrmitente Ruidoso Incipicntc Figura I . / . Comporfamiento en el fiempo de una falla
Estas fallas por sus características se pueden incluir dentro del carácter de fallas multiplicativas o aditivas.
1.3.3 Diagnóstico y detección de fallas
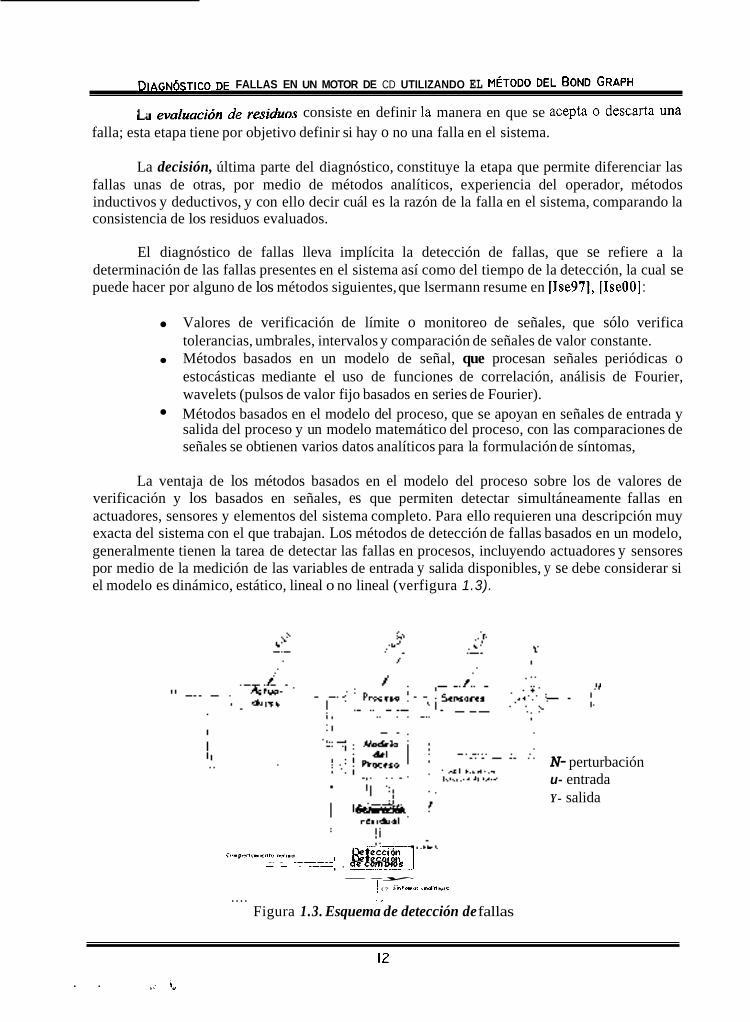
El diagnóstico de fallas permite conocer la ubicación, duración, famaño y tipo de falla, basándose en los síntomas que presenta el sistema en general o en particular. Un esquema propuesto por Isennann [IseM] para aplicar el diagnóstico de fallas en general se muestra en bloques en lafigura 1.2.
,I
' Decisión
'í i ~. ií
L,
' Evaluación de ! residuos ..
FiguFa 1.2. Esquema de diagnóstico de fallas
El principio básico para la generación de residuos radica en la generación de ecuaciones que relaciona señales de salida medidas del sistema. El valor del residuo debe ser cuantificado para la generación de síntomas.
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
evaluación de residuos consiste en definir la manera en que se acepta O descarta una falla; esta etapa tiene por objetivo definir si hay o no una falla en el sistema.
La decisión, última parte del diagnóstico, constituye la etapa que permite diferenciar las fallas unas de otras, por medio de métodos analíticos, experiencia del operador, métodos inductivos y deductivos, y con ello decir cuál es la razón de la falla en el sistema, comparando la consistencia de los residuos evaluados.
El diagnóstico de fallas lleva implícita la detección de fallas, que se refiere a la determinación de las fallas presentes en el sistema así como del tiempo de la detección, la cual se puede hacer por alguno de los métodos siguientes, que lsermann resume en IIse971, [IseOO]:
Valores de verificación de límite o monitoreo de señales, que sólo verifica tolerancias, umbrales, intervalos y comparación de señales de valor constante. Métodos basados en un modelo de señal, que procesan señales periódicas o estocásticas mediante el uso de funciones de correlación, análisis de Fourier, wavelets (pulsos de valor fijo basados en series de Fourier). Métodos basados en el modelo del proceso, que se apoyan en señales de entrada y salida del proceso y un modelo matemático del proceso, con las comparaciones de señales se obtienen varios datos analíticos para la formulación de síntomas,
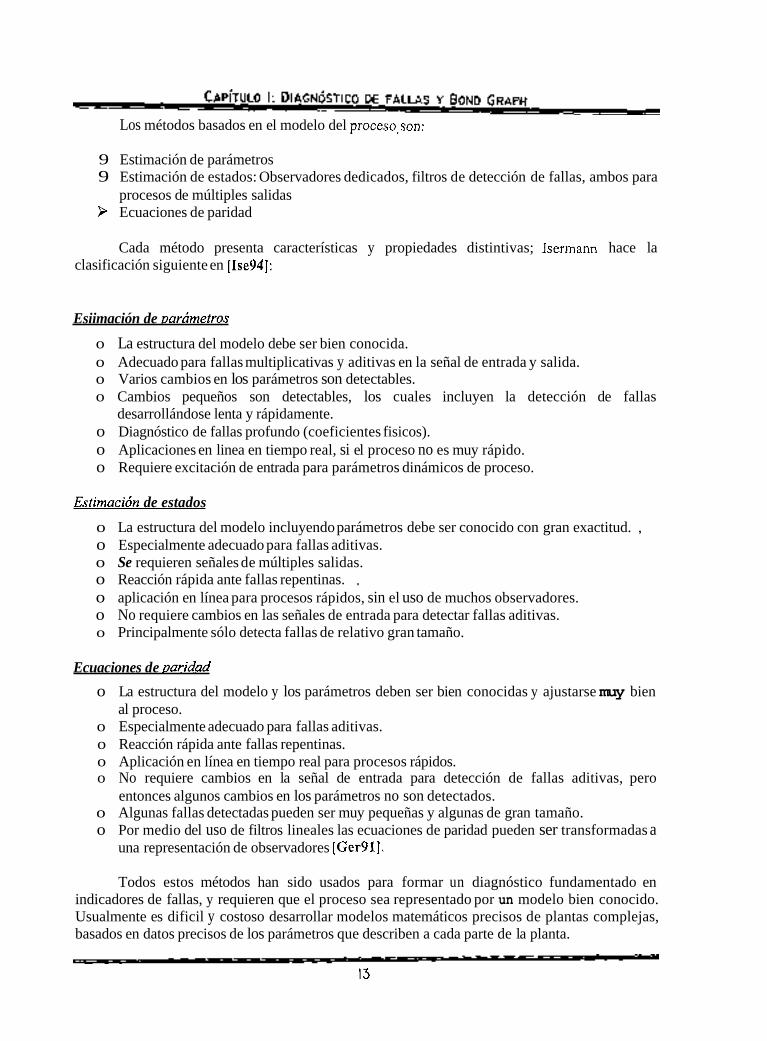
La ventaja de los métodos basados en el modelo del proceso sobre los de valores de verificación y los basados en señales, es que permiten detectar simultáneamente fallas en actuadores, sensores y elementos del sistema completo. Para ello requieren una descripción muy exacta del sistema con el que trabajan. Los métodos de detección de fallas basados en un modelo, generalmente tienen la tarea de detectar las fallas en procesos, incluyendo actuadores y sensores por medio de la medición de las variables de entrada y salida disponibles, y se debe considerar si el modelo es dinámico, estático, lineal o no lineal (verfigura 1.3).
i..ip.i,irniii8.,.d j Doteccih , d e c m b b ] --y- I (? ?"in,% ..!a"*,<
.... ., Figura 1.3. Esquema de detección de fallas
N- perturbación u- entrada Y- salida
12
*.: r . .
Los métodos basados en el modelo del proceso.son:
9 Estimación de parámetros 9 Estimación de estados: Observadores dedicados, filtros de detección de fallas, ambos para
> Ecuaciones de paridad procesos de múltiples salidas
Cada método presenta características y propiedades distintivas; lsennann hace la clasificación siguiente en [Ise94]:
Esiimación de Darámeiros o La estructura del modelo debe ser bien conocida. o Adecuado para fallas multiplicativas y aditivas en la señal de entrada y salida. o Varios cambios en los parámetros son detectables. o Cambios pequeños son detectables, los cuales incluyen la detección de fallas
desarrollándose lenta y rápidamente. o Diagnóstico de fallas profundo (coeficientes fisicos). o Aplicaciones en linea en tiempo real, si el proceso no es muy rápido. o Requiere excitación de entrada para parámetros dinámicos de proceso.
Estimacien de estados o La estructura del modelo incluyendo parámetros debe ser conocido con gran exactitud. , o Especialmente adecuado para fallas aditivas. o Se requieren señales de múltiples salidas. o Reacción rápida ante fallas repentinas. ,
o aplicación en línea para procesos rápidos, sin el uso de muchos observadores. o No requiere cambios en las señales de entrada para detectar fallas aditivas. o Principalmente sólo detecta fallas de relativo gran tamaño.
Ecuaciones de varidad o La estructura del modelo y los parámetros deben ser bien conocidas y ajustarse muy bien
al proceso. o Especialmente adecuado para fallas aditivas. o Reacción rápida ante fallas repentinas. o Aplicación en línea en tiempo real para procesos rápidos. o No requiere cambios en la señal de entrada para detección de fallas aditivas, pero
entonces algunos cambios en los parámetros no son detectados. o Algunas fallas detectadas pueden ser muy pequeñas y algunas de gran tamaño. o Por medio del uso de filtros lineales las ecuaciones de paridad pueden ser transformadas a
una representación de observadores [Ger91].
Todos estos métodos han sido usados para formar un diagnóstico fundamentado en indicadores de fallas, y requieren que el proceso sea representado por un modelo bien conocido. Usualmente es dificil y costoso desarrollar modelos matemáticos precisos de plantas complejas, basados en datos precisos de los parámetros que describen a cada parte de la planta.
13
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL,MÉTODO DEL BOND GRAPH
L~~ métodos basados en modelos de señal requieren un esfuerzo matemático mayor, así como de herramientas de métodos numéricos y sistemas computaciones veloces, esto debido a la rapidez que requieren para el análisis y procesamiento de las señales provenientes del proceso.
Los métodos citados son de carácter puramente cuantitativo o analítico, es decir, el modelo con el que trabajan los métodos de detección usan relaciones dinámicas y estáticas de las variables y parámetros, proporcionando cantidades del sistema para describir el comportamiento del sistema en términos matemáticos, ya que de estos valores se generan los residuos.
Por otro lado se presentan los modelos cualitativos, que usando también relaciones dinámicas y estáticas de las variables y parámetros, definen términos causales o reglas si- entonces ($then) a partir de un orden topológico del sistema, como se indica y muestra en IIB961, IIse941, (Pat971, [vanOO].
Las fallas multiplicativas y aditivas competen a la parte cuantitativa del diagnóstico, mientras que las fallas de carácter operacional (y algunas aditivas) son de la parte cualitativa. Esta última falla puede ser debida a una inapropiada acción del operador.
Con estas dos maneras de considerar al sistema mediante un modelo descriptivo se complementa el diagnóstico de fallas por lo siguiente:
por un lado las hipótesis generadas por la parte cualitativa se confirman o desechan con la parte cuantitativa de detección;
J por otro, permite ver una falla de carácter operacional que no puede ser detectada por el modelo analítico;
J asimismo, el poco o nulo conocimiento de un parámetro no permitirá hacer su función a la parte analítica cuantitativa, pero'sí a la parte cualitativa, por lo que la detección y diagnóstico aún así se realizará;
J las fallas ligeras o de baja magnitud no serán detectadas por la parte cualitativa, pero sí por la parte cuantitativa; -
y las características propias de los modelos cuantitativos mencionadas antes.
La implementación de un sistema que integre los análisis cuantitativo y cualitativo para formar un sistema de diagnóstico completo integral se sugiere por IChP991, [Ise94], [1B961.
En los métodos cuantitativos siempre para poder diagnosticar es necesaria la ayuda del conocimiento heurístico. La parte analítica comprende:
- Un modelo cuantitativo. - - Historia del proceso. - Estadísticas de falla.
Un comportamiento del proceso normal
Debido a lo anterior es que la parte de detección no sólo sea la más importante ai momento de establecer nuevas metodologías, sino también las técnicas de diagnóstico; la parte de detección es la que involucra el analisis matemático para su análisis y comprensión, mientras que la parte de diagnóstico implica mayor información sobre su operación y conocimientos sobre su comportamiento.
.
1.4 Bond Graph
El modelado de los sistemas físicos involucra principalmente la descripción dinámica del sistema mediante ecuaciones matemáticas que están dadas como un conjunto de relaciones abstractas que por si solas no indicarian nada. Los análisis contemplan principalmente transformaciones y ecuaciones diferenciales realizadas de manera discreta o continua.
Las relaciones matedt¡cas principales usadas para modelos matemáticos de los sistema físicos, contemplan el USO de ecuaciones diferenciales y transformadas de Laplace. Para ello es necesario saber las relaciones y principios fisicos básicos que gobiernan a cada sistema tratado: mecánico, eléctrico, neumático, entre otros.
Estos sistemas fisicos tienen en común la energía que contienen. Todos los sistemas obedecen a las relaciones energéticas entre los componentes que lo forman. Para tratar de unificar estas relaciones energéticas dinámicas, existen principalmente tres métodos energéticos: Lagrangiano, Hamiltoniano y Bond Graph [LG94], (We1791, (BroOl]. En todos ellos los sistemas se ven como dispositivos manipuladores de energía y emplean variables generalizadas.
El Lagrangiano y Hamiltoniano son métodos variacionales, en donde las interacciones energéticas de un sistema están asociadas con una hnción de energía del sistema completo, el cual tiene un balance cero cuando la dinámica del sistema es correcta [OLNS98], [We179].
En el método Hamiltoniano se emplea el principio: “En movimientos naturales entre dos configuraciones fijas de acumulación de energía, en un tiempo inicial a un tiempo final, el indicador variacional debe desaparecer”. Lo “natural” se refiere a cumplir con las restricciones físicas del sistema, mientras que el “indicador variacional” se refiere a variaciones en el sistema que no alteren este movimiento natural y sean admisibles IOLNS981, [LG94], IWe1791.
El Lagrangiano utiliza también variaciones permisibles y además, la diferencia entre la energía potencial y cinética del sistema que se analiza.
En ambos métodos se describen, en términos de las variables generalizadas, funciones de energía de manera dinámica, con el fin de obtener el comportamiento debida a cada coordenada de la variable generalizada.
La teoría del Bond Graph (BG) fue desarrollada entre 1959 y 1961 por Paynter, como una respuesta al modelado de los sistemas físicos en forma general: integra sistemas de naturaleza distinta llamados dominios, representando para ello las relaciones energéticas entre sistemas y componentes del sistema por medio de enlaces energéticos. El dominio puede ser mecánico, eléctrico, hidráulico, neumático, entre otros, por ello que esta herramienta de modelado sea poderosa en ese sentido, pues trata en forma gráfica la descripción del comportamiento dinámico y estático de los sistemas fisicos considerando 1a.energía común de los componentes, como se explica en (BroOlj, (KMR901, [WebO2], (We1791, IGS961.
A diferencia de tratar en forma análoga ciertos sistemas (por ejemplo, uno eléctrico con uno mecánico) a través de ecuaciones diferenciales análogas, el BG .utiliza conceptos físicos, y aprovecha el hecho de que la energía da a un sistema la dinámica de su comportamiento, y que
15
ésta es una consecuencia directa del intercambio de energía entre las partes componentes del sistema.
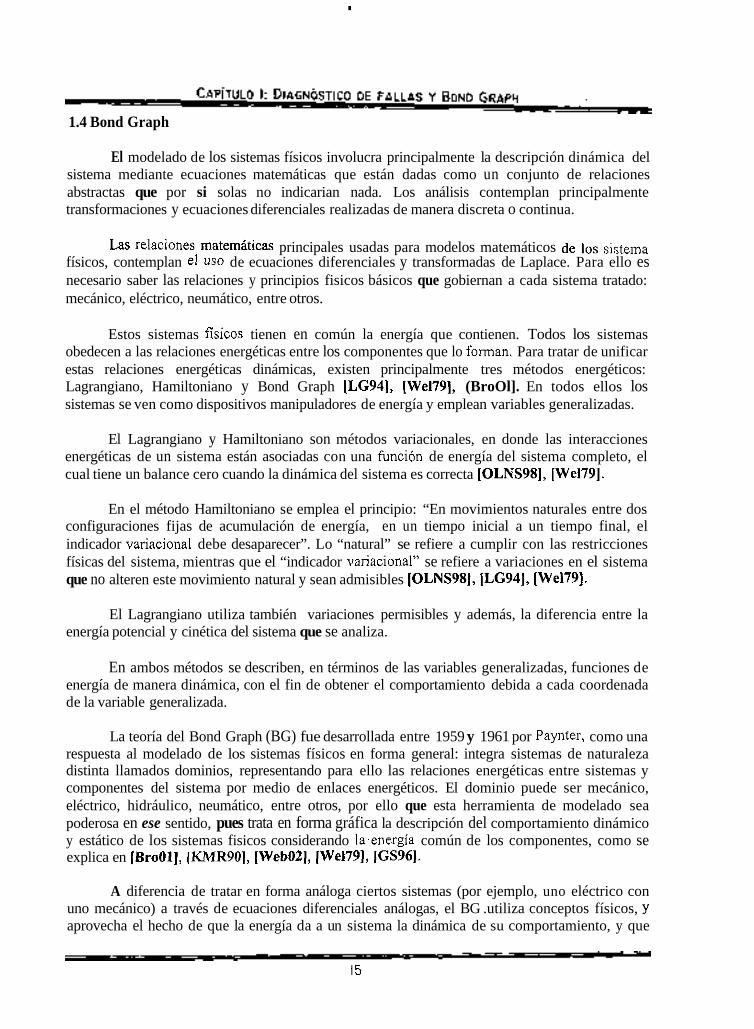
En BG sólo se utilizan dos tipos de variables: esfuerzo (e ) yfrujo 0; los cuales definen la interacción de potencia, recordando que el producto entre estas dos variables es la potencia. A manera de listado y observando la figura 1.4, se dan los siguientes conceptos acerca del modelado en BG.
Símbolo
Figura 1.4. Relación energéiica entre dos elementos mediante BG
Todos los elementos básicos son conectados por flechas con media punta, llamadas enlaces (bonds). La punta de la flecha indica hacia donde fluye la energía, o bien, qué elemento la consume. En lajigurn 1.4 el elemento A envía la potencia (energía) al elemento B. Cada enlace representa a ambas variables: flujo y esfuerzo. Si el flujo va en una dirección dada, entonces el esfuerzo va en dirección contraria al flujo. Esta dirección no está indicada por la media punta de flecha. La ley de conservación de la energía siempre se cumple.
Tipo de elemento Nombre del elemento Simbolo gráfico Relación causal (causalidad preferida) (preferida)
1.4.1 Elementos del Bond Graph
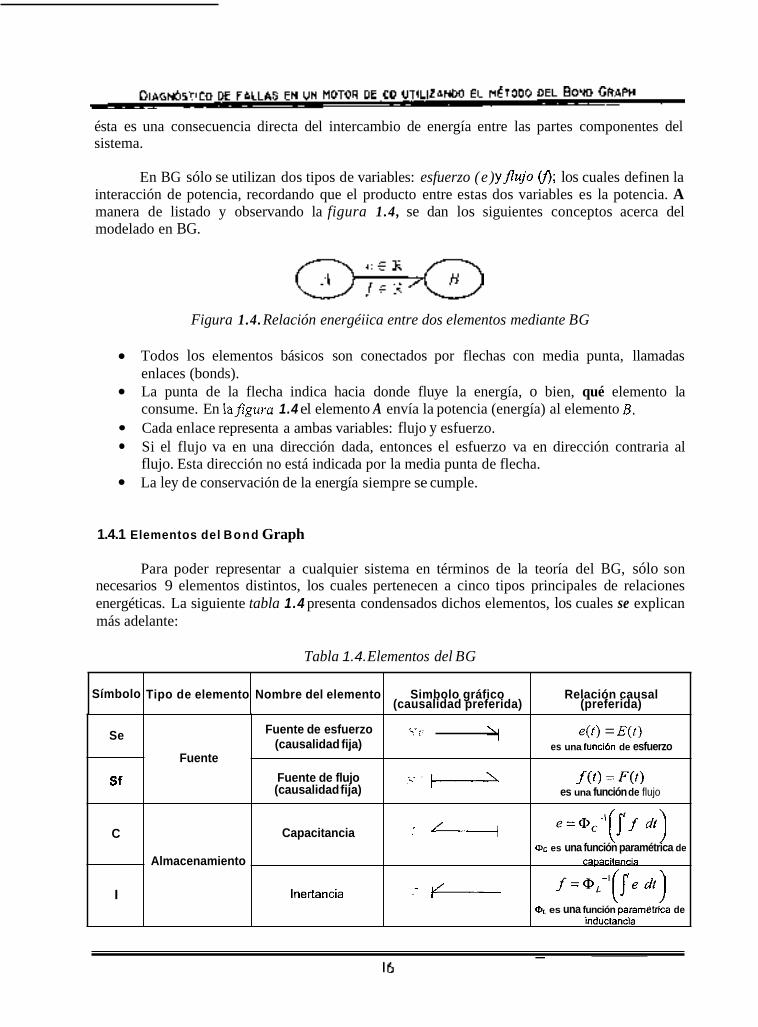
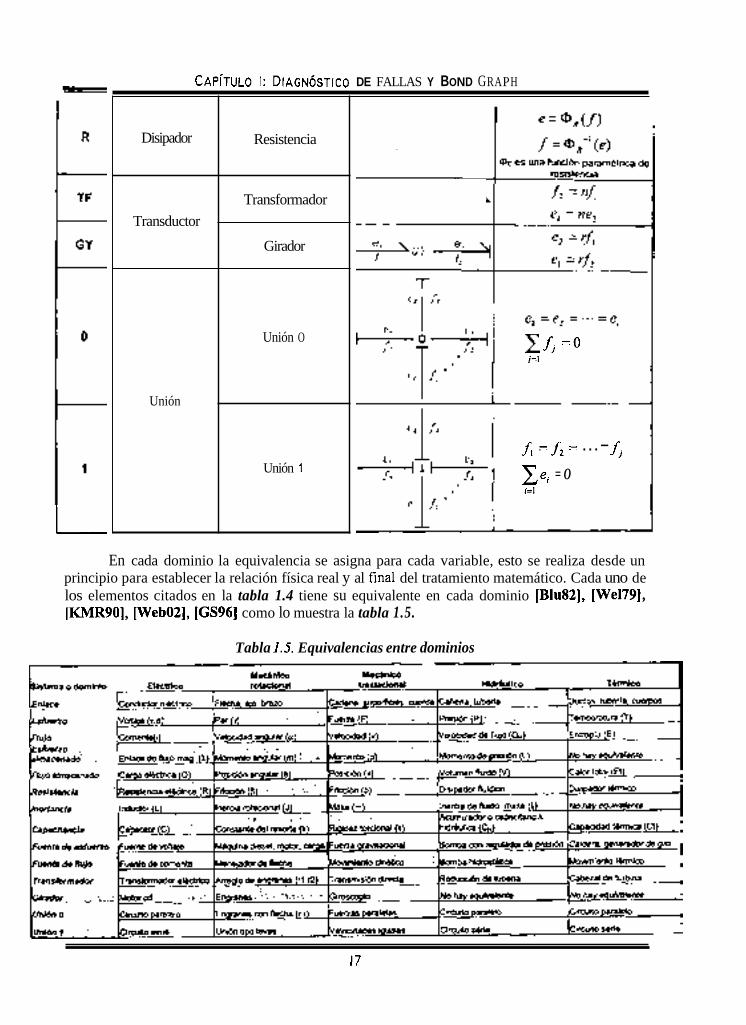
Para poder representar a cualquier sistema en términos de la teoría del BG, sólo son necesarios 9 elementos distintos, los cuales pertenecen a cinco tipos principales de relaciones energéticas. La siguiente tabla 1.4 presenta condensados dichos elementos, los cuales se explican más adelante:
Tabla 1.4. Elementos del BG
Se
Sf
C
I
e(r) = E( t ) es una funci6n de esfuerzo
Fuente de esfuerzo y ; ~ \i (causalidad fija)
Fuente Fuente de flujo ,.. ' 1- f ( t ) - F(t )
es una función de flujo (causalidad fija)
Capacitancia .' - e = O c - ' ( J f d i )
lneriancia -- - f = a i - l ( J e di)
0, es una función paramétrica de Almacenamiento capacilancia
5~ es una función paramefrica de induclancia
CAPíTULO I: DIAGNÓSTICO DE FALLAS Y BOND GRAPH
L
Disipador
Transductor
Unión
Resistencia
Transformador
Girador
Unión O
Unión 1
fj - 0 j-l
fj f 1 - f 2 - ...- c e ; = O i=l
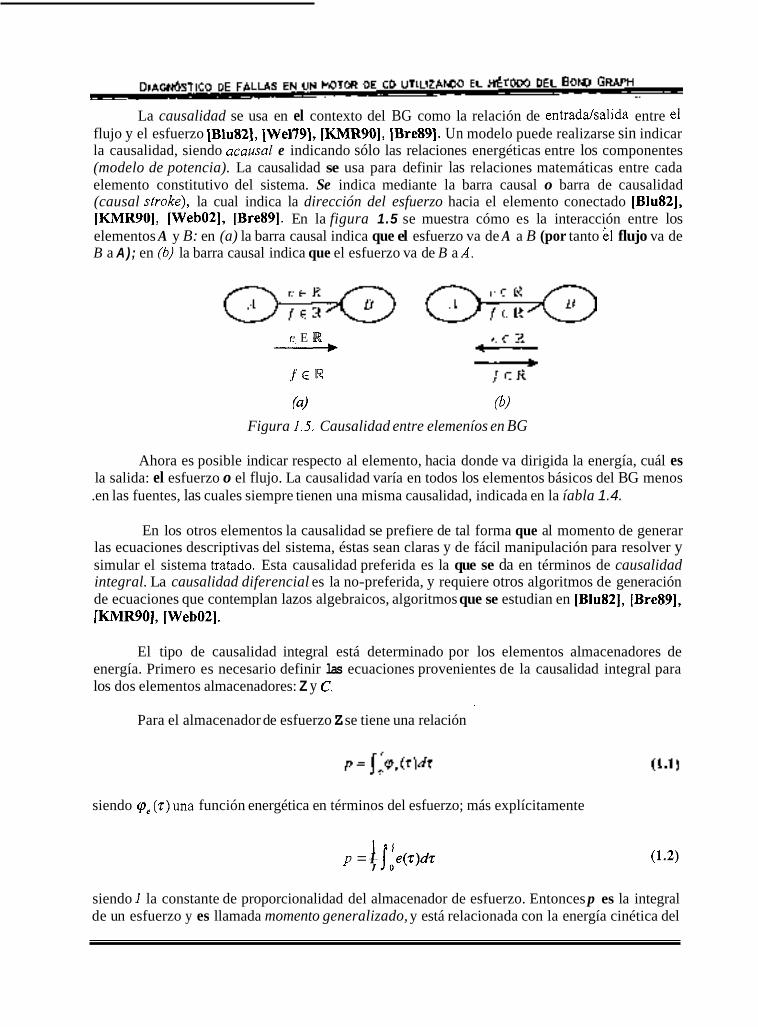
En cada dominio la equivalencia se asigna para cada variable, esto se realiza desde un principio para establecer la relación física real y al final del tratamiento matemático. Cada uno de los elementos citados en la tabla 1.4 tiene su equivalente en cada dominio [BluSZ], [We179], [KMR90], [WebOZ], [GS96] como lo muestra la tabla 1.5.
Tabla 1.5. Equivalencias entre dominios
17
La causalidad se usa en el contexto del BG como la relación de entradalsalida entre el flujo y el esfuerzo IBlu821, [We179], [KMR90], [Bre89]. Un modelo puede realizarse sin indicar la causalidad, siendo acausal e indicando sólo las relaciones energéticas entre los componentes (modelo de potencia). La causalidad se usa para definir las relaciones matemáticas entre cada elemento constitutivo del sistema. Se indica mediante la barra causal o barra de causalidad (causal síroke), la cual indica la dirección del esfuerzo hacia el elemento conectado [Blu82], IKMR901, [Web02], [Bre89]. En la figura 1.5 se muestra cómo es la interacción entre los elementos A y B: en (a) la barra causal indica que el esfuerzo va de A a B (por tanto el flujo va de B a A); en @) la barra causal indica que el esfuerzo va de B a A ,
c: E R ___+
J E W
(a) (b) Figura IS. Causalidad entre elemeníos en BG
Ahora es posible indicar respecto al elemento, hacia donde va dirigida la energía, cuál es la salida: el esfuerzo o el flujo. La causalidad varía en todos los elementos básicos del BG menos .en las fuentes, las cuales siempre tienen una misma causalidad, indicada en la íabla 1.4.
En los otros elementos la causalidad se prefiere de tal forma que al momento de generar las ecuaciones descriptivas del sistema, éstas sean claras y de fácil manipulación para resolver y simular el sistema iratado. Esta causalidad preferida es la que se da en términos de causalidad integral. La causalidad diferencial es la no-preferida, y requiere otros algoritmos de generación de ecuaciones que contemplan lazos algebraicos, algoritmos que se estudian en [Blu82], [Bre89], [KMFUO], [Web02].
El tipo de causalidad integral está determinado por los elementos almacenadores de energía. Primero es necesario definir las ecuaciones provenientes de la causalidad integral para los dos elementos almacenadores: Z y C.
. ,
Para el almacenador de esfuerzo Z se tiene una relación
siendo 9* (z)una función energética en términos del esfuerzo; más explícitamente
1 1 p = - j o e ( z ) d z I (1.2)
siendo I la constante de proporcionalidad del almacenador de esfuerzo. Entonces p es la integral de un esfuerzo y es llamada momento generalizado, y está relacionada con la energía cinética del
sistema. La función e(z) expresa la función del esfuerzo en el tiempo En la tabla 1.4 se indica la causalidad integral para el elemento I, donde la salida de este elemento es un flujo, tiene una causalidad de flujo.
Para el almacenador de flujo C se tiene una relación
MEC~NICO
siendo cp, (7) una función energética en términos del flujo; más explícitamente
Momento m, (Desplazamiento x Momento angular m Iüespiazamiento angular e
siendo C la constante de proporcionalidad del almacenador de flujo. Aquí q es la integral de un flujo y es llamado desplazamiento generalizado, y está relacionada con la energía potencial del sistema. La funciónflz) expresa la función del flujo en el tiempo. En la tabla 1.4 se indica la causalidad integral para el elemento C, donde la salida de este elemento es un esfuerzo, tiene una causalidad de esfuerzo.
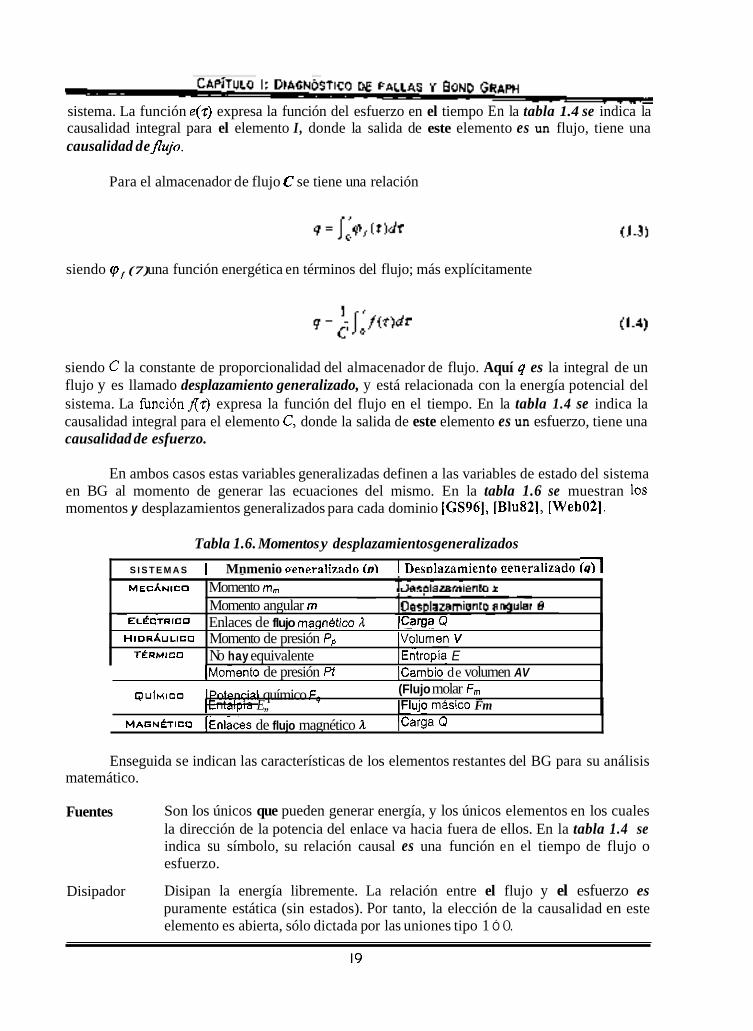
En ambos casos estas variables generalizadas definen a las variables de estado del sistema en BG al momento de generar las ecuaciones del mismo. En la tabla 1.6 se muestran los momentos y desplazamientos generalizados para cada dominio [GS96], [Blu82], [WebOt].
Tabla 1.6. Momentos y desplazamientos generalizados S I S T E M A S I Mnmenio peneralizado (D) I Desolazamiento eeneralizado (dl
p ~ ~ I ? ~ ~ ~ i ~ ~ HIORAULICO
TÉRMICO
Enlaces de flujo magnbtico ,i /Carga Q Momento de presión Pp lvoiumen V No hay equivalente IEntropia E
IMomento de presión Pf \Cambio de volumen AV (Flujo molar Fm
UU~MICO JPotencial químico Fq - JEntalpia E,, ~F~UJO masico Fm
M A G N ~ T I ~ O ]Enlaces de flujo magnético A !Carga Q
Enseguida se indican las características de los elementos restantes del BG para su análisis matemático.
Fuentes Son los únicos que pueden generar energía, y los únicos elementos en los cuales la dirección de la potencia del enlace va hacia fuera de ellos. En la tabla 1.4 se indica su símbolo, su relación causal es una función en el tiempo de flujo o esfuerzo.
Disipan la energía libremente. La relación entre el flujo y el esfuerzo es puramente estática (sin estados). Por tanto, la elección de la causalidad en este elemento es abierta, sólo dictada por las uniones tipo 1 Ó O.
Disipador
19

, , .~ r . . Este elemento es de dos puertos y relaciona el esfuerzo de entrada con el flujo de salida mediante una constante de proporcionalidad. La causalidad preferida es la
Girador
Transformador Elemento de dos puertos que relaciona el esfuerzo de entrada con el de salida, y el flujo de entrada con el de salida. La causalidad preferida es la siguiente
l e. \TI. I e: \ f, = nf, 1, f: e, = ne2
Los últimos elementos por describir son las uniones tipo. Estas definen las ecuaciones estructurales en donde interactúan las relaciones causales. Se puede pensar en estas como una generalización de las leyes de Kirchhoff; acoplan uno o más elementos en una forma continua de potencia: no hay almacenamiento ni disipación de energía.
La unión tipo I o tipo s, es conocida como unión deflujos, esto debido a que la restricción en esta unión es que todos los enlaces que concurren a ella tienen el mismo valor de flujo; y la suma de los esfuerzos es igual a cero. Respecto a la causalidad, se deduce que sólo un enlace podrá llevar la causalidad de esfuerzo fuera de la unión tipo 1. La dirección de la potencia (la media flecha) indica el signo algebraico de cada esfuerzo: los esfuerzos que entran a la unión son positivos y los que salen son negativos.
La unión tipo.0 o t ipop, es conocida como unión de esfuerzos, ya que en esta unión todos los enlaces concurrentes tienen el mismo valor de esfuerzo; y la suma de los flujos es igual a cero. Respecto a la causalidad, sólo un enlace puede llevar la causalidad de esfuerzo hacia adentro de la unión tipo O. La dirección de la potencia (la media flecha) indica el signo algebraico de cada flujo: los flujos que entran a la unión son positivos y los que salen son negativos.
1.4.2 Reglas del Bond Graph
Algunas reglas sobre la generación de ecuaciones son inherentes a las características de los elementos mencionadas en la sección anterior. Los siguientes gnipos de reglas son el resultado de una compilación de varios documentos que abordan el BG y que se han mencionado Y se mencionarán hasta el final de esta sección. Primero se presentan las que indican cómo obtener el modelo.
1. Ubíquese en el contexto del BG cada variable a tratar en su sistema, es decir, defina quiénes serán variables de flujo y quiénes variables de esfuerzo. Aquí es de ayuda la rubia 1.5.
2. Identifíquese y ubíquese los elementos almacenadores y disipativos por el tipo del que sean. Utilice también la tubia 1.5 como ayuda.
3. Dibújense enlaces entre cada vanable de esfuerzo (o variables de flujo y fuentes) definidos como referencias iniciales, definase también una referencia general fija Vigura 1.6 (u), (b)). Únicamente en el dominio mecánico es más fácil ubicar como referencias a las velocidades (flujo). Entre cada esfuerzo de referencia se indica
20 . ,
que hay un flujo común por medio de una unión tipo 1 a la cual se asocia un enlace a cada parámetro almacenador o disipativo que se encuentre entre dichas variables de esfuerzo de referencia (variables de flujo para dominio mecánico).
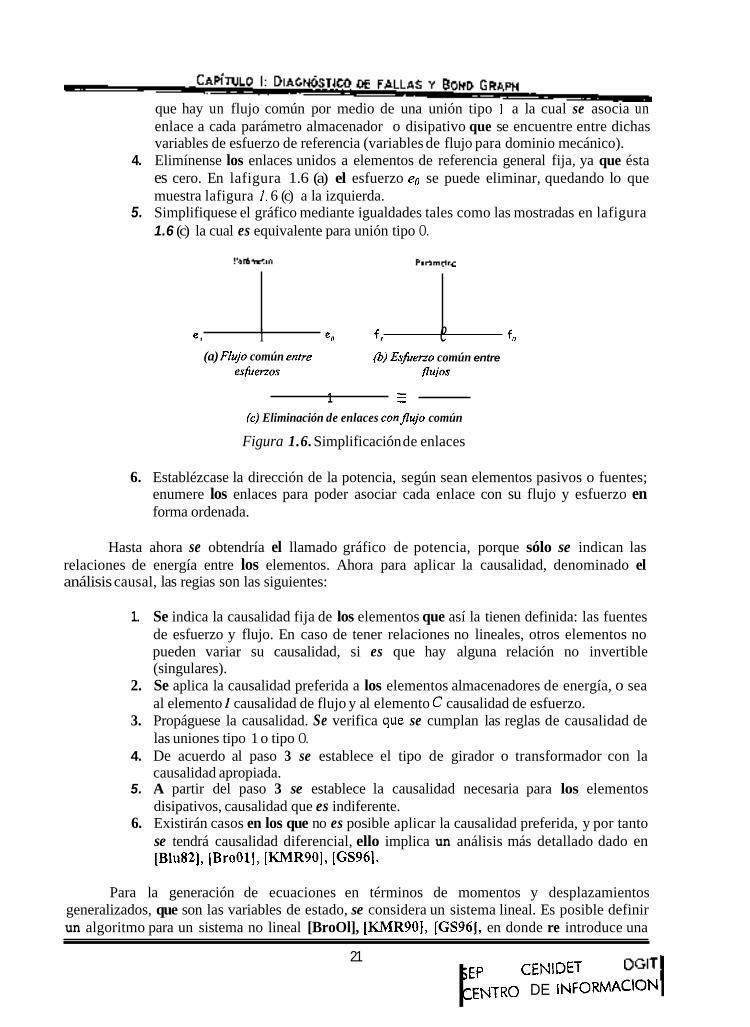
4. Elimínense los enlaces unidos a elementos de referencia general fija, ya que ésta es cero. En lafigura 1.6 (a) el esfuerzo eo se puede eliminar, quedando lo que muestra lafigura I. 6 (c) a la izquierda.
5. Simplifiquese el gráfico mediante igualdades tales como las mostradas en lafigura 1.6 (c) la cual es equivalente para unión tipo O.
e, i eo f, e f"
(a) Fly0 común enire (b) fifuerzo común entre estilenos #lujos
- - 1 - (c) Eliminación de enlaces conpujo común
Figura 1.6. Simplificación de enlaces
6. Establézcase la dirección de la potencia, según sean elementos pasivos o fuentes; enumere los enlaces para poder asociar cada enlace con su flujo y esfuerzo en forma ordenada.
Hasta ahora se obtendría el llamado gráfico de potencia, porque sólo se indican las relaciones de energía entre los elementos. Ahora para aplicar la causalidad, denominado el análisis causal, las regias son las siguientes:
1. Se indica la causalidad fija de los elementos que así la tienen definida: las fuentes de esfuerzo y flujo. En caso de tener relaciones no lineales, otros elementos no pueden variar su causalidad, si es que hay alguna relación no invertible (singulares).
2. Se aplica la causalidad preferida a los elementos almacenadores de energía, o sea al elemento 1 causalidad de flujo y al elemento C causalidad de esfuerzo.
3. Propáguese la causalidad. Se verifica que se cumplan las reglas de causalidad de las uniones tipo 1 o tipo O.
4. De acuerdo al paso 3 se establece el tipo de girador o transformador con la causalidad apropiada.
5. A partir del paso 3 se establece la causalidad necesaria para los elementos disipativos, causalidad que es indiferente.
6. Existirán casos en los que no es posible aplicar la causalidad preferida, y por tanto se tendrá causalidad diferencial, ello implica un análisis más detallado dado en [Blu82], [BroOlJ, [KMR90], [GS96].
Para la generación de ecuaciones en términos de momentos y desplazamientos generalizados, que son las variables de estado, se considera un sistema lineal. Es posible definir un algoritmo para un sistema no lineal [BroOl], [KMR901, [GS961, en donde re introduce una
21
,-ENTRO DE ~NFORMAC~ON SEP CENlDET I
L . ~ . I,,,." ,
matriz de transformación, así como las relaciones energéticas no lineales entre los componentes, dicho algoritmo no cambia mucho del siguiente:
1. Genérese un conjunto de ecuaciones provenientes de ias relaciones constitutivas de los e1ementos;incluida las'de las fuentes de esfuerzo 0,flujo.
2. Genérese'las ecuaciones provenientes de las uniones tipo 1 (O), dejando en términos de las otras .variables de esfuerzo (flujo) a la variable de esfuerzo (flujo) que lleva la causalidad be esfuerzo (flujo) fuera (dentro) de la unión.
3. Para facilitar los pasos 1 y 2, recuérdese que se deben obtener dos ecuaciones por nodo (transformador y girador también) y una ecuación por cada elemento.
4. Reemplácense en las ecuaciones de unión (paso 2) las ecuaciones del paso 1. 5. Las ecuaciones del paso 4 deberian quedar en términos de las variables de estadop
y q. Se deben reemplazar las variables expresadas en términos de variables de estado hasta que de un lado de la ecuación se tenga todo expresado en términos de los estados y parámetros del sistema.
, . , ; I .
Los pasos para la aplicación de causalidad, así como de la obtención de ecuaciones cuando se presenta un problema de causalidad diferencial y de lazos algebraicos no se consideran aquí. Esto involucra lazos de potencia y lazos causales. Para ello se necesita un análisis distinto y un poco más extenso. Consultar para ello [BroOl], [Bre89], [Tho90].
1.4.3 Ejemplo
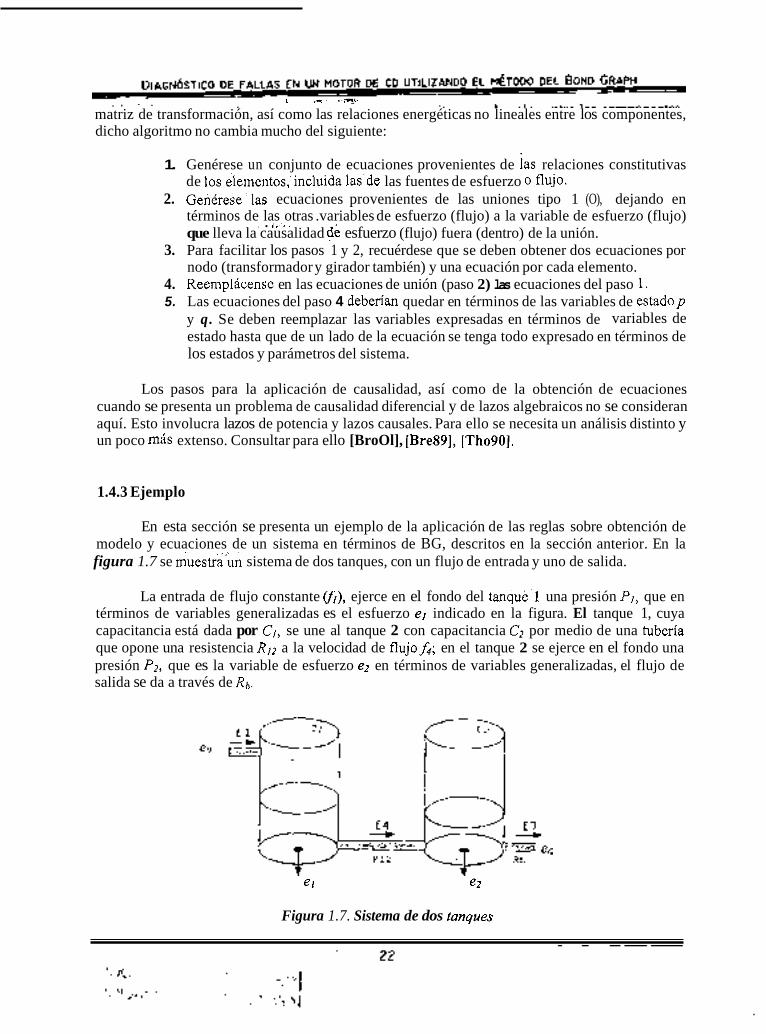
En esta sección se presenta un ejemplo de la aplicación de las reglas sobre obtención de modelo y ecuaciones de un sistema en términos de BG, descritos en la sección anterior. En la figura 1.7 se muestra'un sistema de dos tanques, con un flujo de entrada y uno de salida.
La entrada de flujo constante VI), ejerce en el fondo del tanque'] una presión P J , que en términos de variables generalizadas es el esfuerzo e , indicado en la figura. El tanque 1, cuya capacitancia está dada por CJ, se une al tanque 2 con capacitancia CZ por medio de una tuberia que opone una resistencia RIZ a la velocidad de flujo$,; en el tanque 2 se ejerce en el fondo una presión Pz, que es la variable de esfuerzo e2 en términos de variables generalizadas, el flujo de salida se da a través de Rb.
el e2
Figura 1.7. Sistema de dos fanques
-.-
CAPíTULO I: DIAGN~STICO DE FALLAS Y BOND GRAPH
El esfuerzo de referencia general es eo, y representa la presión ejercida por el entorno, y que es, por tanto, una presión que afecta al flujo de entrada y al de salida, independientemente de la altura a la que se encuentren dichas salidas. Se puede pensar en este esfuerzo de referencia como la tierra o voltaje de referencia cero que se usa en circuitos eléctricos.
En lo siguiente, se utilizarán variables de flujo y esfuerzo, así como las variables generalizadas de desplazamiento y momento, de manera que estén referenciadas al número de enlace derivado del modelo en BG.
Para formar el modelo en BG se usan los pasos del algoritmo sobre su generación:
1. Se ubica en el contexto del BG a cada variable: el flujo será el que represente la velocidad de flujo de líquido, y el esfuerzo representará a la presión en el fondo de los tanques, y los enlaces son las iuberias entre los tanques (ver tabla 1.5).
2. Se identifican los parámetros pasivos: la capacitancia en los tanques y la resistencia en las tuberías. El flujo de entrada o fuente es el flujo indicado comof,.
. -
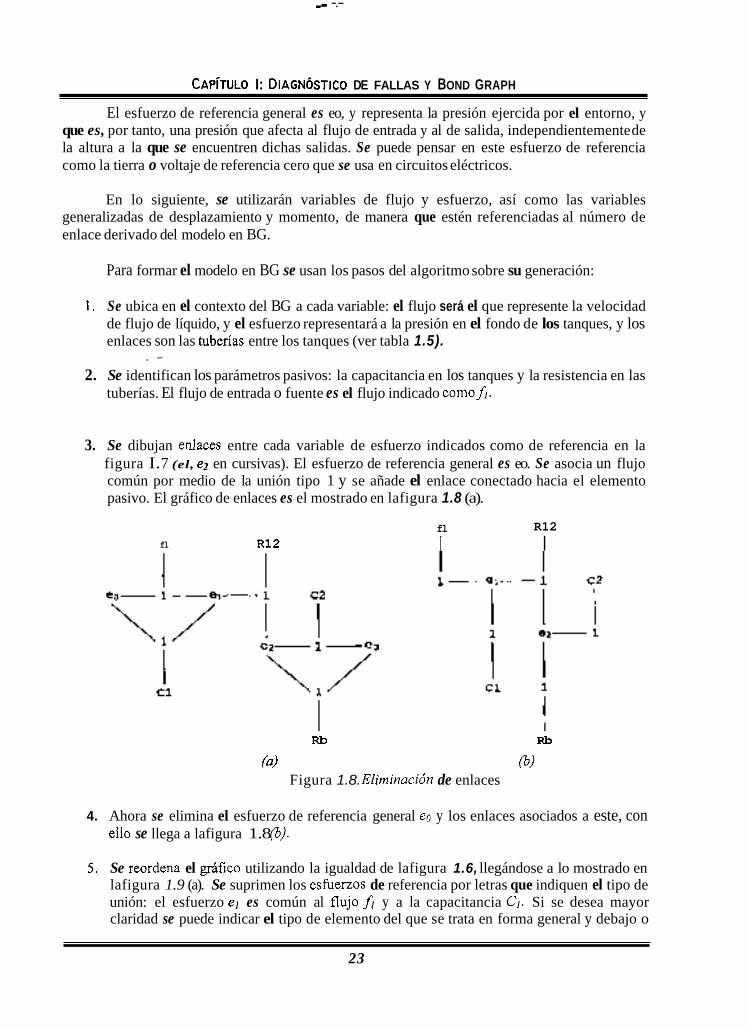
3. Se dibujan enlaces entre cada variable de esfuerzo indicados como de referencia en la figura I. 7 (el, e2 en cursivas). El esfuerzo de referencia general es eo. Se asocia un flujo común por medio de la unión tipo 1 y se añade el enlace conectado hacia el elemento pasivo. El gráfico de enlaces es el mostrado en lafigura 1.8 (a).
fl R12 R12
I fl
I
Rb Rb
(0) (b) Figura 1.8. Eliminacibn de enlaces
4. Ahora se elimina el esfuerzo de referencia general eo y los enlaces asociados a este, con ello se llega a lafigura 1.8 0).
5. Se reordena el gnifico utilizando la igualdad de lafigura 1.6, llegándose a lo mostrado en lafigura 1.9 (a). Se suprimen los esfuerzos de referencia por letras que indiquen el tipo de unión: el esfuerzo el es común al flujoA y a la capacitancia C,. Si se desea mayor claridad se puede indicar el tipo de elemento del que se trata en forma general y debajo o
23
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH I . . I
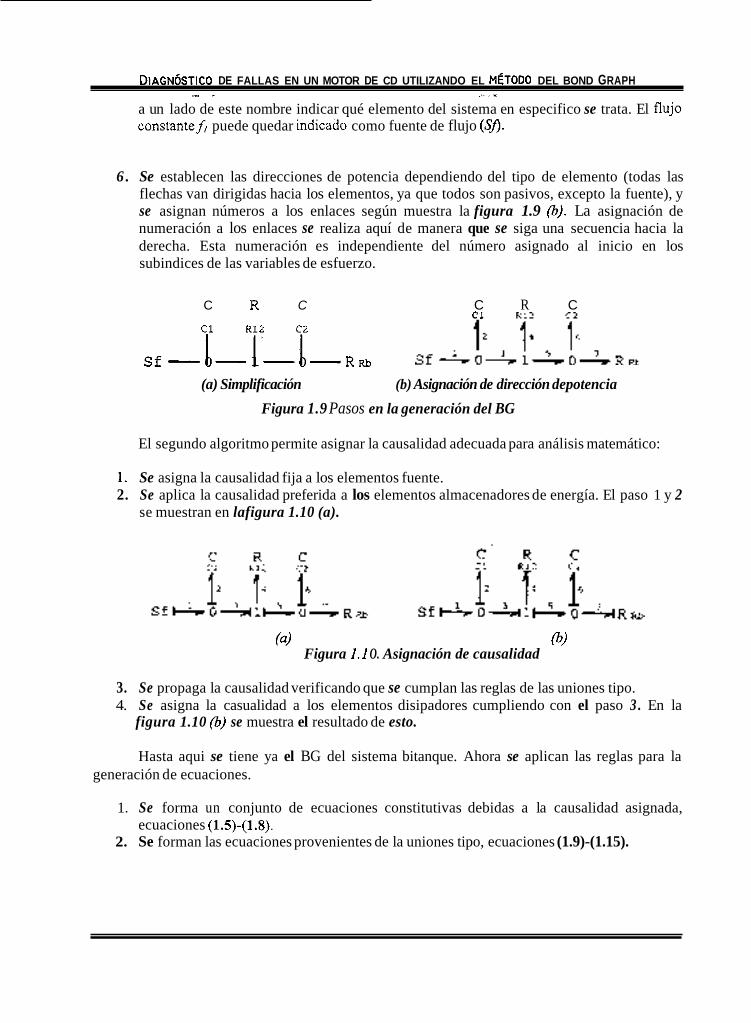
a un lado de este nombre indicar qué elemento del sistema en especifico se trata. El flulo constantefi puede quedar mdicado como fuente de flujo (SA.
6 . Se establecen las direcciones de potencia dependiendo del tipo de elemento (todas las flechas van dirigidas hacia los elementos, ya que todos son pasivos, excepto la fuente), y se asignan números a los enlaces según muestra la figura 1.9 0). La asignación de numeración a los enlaces se realiza aquí de manera que se siga una secuencia hacia la derecha. Esta numeración es independiente del número asignado al inicio en los subindices de las variables de esfuerzo.
C R C C R C Cl
Sf-O- r Rr 1-0- I RRb (a) Simplificación '
Figura 1.9 Pasos en la generación del BG (b) Asignación de dirección depotencia
El segundo algoritmo permite asignar la causalidad adecuada para análisis matemático:
1. Se asigna la causalidad fija a los elementos fuente. 2. Se aplica la causalidad preferida a los elementos almacenadores de energía. El paso 1 y 2
se muestran en lafigura 1.10 (a).
(0) 0) Figura 1.1 O. Asignación de causalidad
3. Se propaga la causalidad verificando que se cumplan las reglas de las uniones tipo. 4. Se asigna la casualidad a los elementos disipadores cumpliendo con el paso 3 . En la
figura 1.10 (b) se muestra el resultado de esto.
Hasta aqui se tiene ya el BG del sistema bitanque. Ahora se aplican las reglas para la generación de ecuaciones.
1. Se forma un conjunto de ecuaciones constitutivas debidas a la causalidad asignada, ecuaciones (1.5)-(1.8).
2. Se forman las ecuaciones provenientes de la uniones tipo, ecuaciones (1.9)-(1.15).

CAPíTULO I: DIAGNÓSTICO DE FALLAS Y BOND GRAPH
e, :e2 -.e3 (1.10) I Ecuaciones de
f , = A - f 3 (1.11) } ~ unión tipo O
(1.5)
(1.6)
42 e -- -c, 46 e, .- -
e4
Ecuaciones :
C 2
R l 2
R b
Ecuaciones de unión tipo 1
e, = e3 -es (1.13)
< h=sf (1.9) e, = e6 = e, (1.14) Ecuaciones de unión tipo O
f , =- (1.7) f , ,= f 4 = f , (1.12)
e7 f , =- (1.8)
I- f 6 = f s - I , (1.15)
I de elementos
se& su causalidad
Ecuación de fuente
Los pasos 4, 5 se realizan sustituyendo (1.9) en (1.11) y (1.7) mediante (1.12), obteniendo:
e4 f 2 = A --
4 2 (1.16)
ahora usando (1.13) y sustituyendo en esta (1.5) mediante (1.10) y (1.6) mediante (1.14), se obtiene:
pero el flujofi es una derivada, entonces
(1.17)
(1.18)
Ahora tomando (1.15) y sustituyendo en ella a (1.7) mediante (1.12), y a (1.8) se obtiene f e4 e7
R12 Rb 6 -
y se sustituye (1.13) previamente sustituidas (1.5) y (1.6):
(1.19)
(1.20)
Por último se usa (1.6) que se sustituye usando (1.14) para obtener, siendo fs una derivada:
92 46 46
‘ I R , , C2R12 ‘ Z R b q 6 (1.21)
Ahora con las ecuaciones (1.18) y (1.21) se describe la operación del sistema de dos tanques. Si se desea la descripción en variables más comunes, se usa la fabla 1.5 y fabla 1.6. Las ecuaciones quedarían como sigue:
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
(1.22)
(1.23)
En donde QJ, .VI , Q2, V2 son velocidad de flujo y volumen en cada tanque, respectivamente.
1.5 Conclusión
El núcleo de este trabajo de tesis se centra en el diagnóstico de fallas en el conjunto convertidor-motor de cd utilizando la teoría del BG. En este primer capítulo se presentaron los elementos y definiciones básicas del BG. Esto constituye el primer bloque de lo que constituye el método de diagnóstico que se propone en esta tesis, que se presentará en el capitulo 3.
La presentación del planteamiento del problema y del estado del arte delimita el trabajo que se desarrolla en los capítulos posteriores, mientras que el hablar sobre el diagnóstico de fallas en general introduce al lector en el tema al cual se ha de enfocar el BG, presentando algunas definiciones, tipos de fallas y los métodos de detección de fallas que existen.
El Bond Graph es una herramienta Útil en el modelado de sistemas físicos, que a diferencia de otros métodos energéticos de modelado, en donde se requiere un mayor esfuerzo matemático para representar el modelo en términos dinámicos, presenta las ventajas siguientes:
- Sentido físico, que se puede mapear teniendo en cuenta el dominio usado (eléctrico, mecánico, hidráulico, etc.) a elementos físicos de uso más común. Enfoque sistematizado para modelar sistemas de diferente naturaleza. Proporciona información cualitativa y cuantitativa, referida a un análisis de causalidad.
- -
Estas características se explotarán en el método de diagnóstico que se presentará más adelante.
El caso de estudio de esta tesis es el conjunto convertidor-motor de comente directa. En el siguiente capítulo se presenta el motor de comente directa en términos convencionales y en términos del BG.
I , 1
Capítulo 2 El motor de corriente directa
2.1 Introducción
Los motores de comente directa (cd) se presentan como máquinas extensivamente usadas en sistemas de control de posición y propulsores de velocidad variable. Esto a pesar de ser máquinas costosas respecto a los motores de comente alterna (ca), así como de mayor mantenimiento y mala adecuación a lugares polvorientos y ambientes explosivos.
En el presente capítulo se muestra de una manera general las características de los motores de cd, tanto en aplicación como en la base de su funcionamiento, fisico y matemático.
En la sección 2.2 se presenta en general la aplicación de los motores de cd y los tipos que existen según su configuración de armadura y campo.
En la sección 2.3 se enseña el modelo matemático del motor de cd obtenido de un circuito eléctrico, utilizando variables de estado y modelado de la manera más general utilizando conceptos de leyes de circuitos y física general.
En la sección 2.4 se muestra el modelo matemático a partir de elementos del BG, modelo que se construye utilizando los pasos explicados en el capítulo anterior.
En la sección 2.5 se presentan las fallas más comunes de los motores de cd, así como ciertas consideraciones de simulación utilizadas en esta tesis, que se complementa con lo que se presenta en la sección 2.6, indicando cómo se han de introducir las fallas simuladas al sistema, motor de cd. Se finaliza con una conclusión presentada en la sección 2.7.
2.2 Generalidades del motor de cd
Se puede definir a un motor de cd como un transductor de energía eléctrica a energía mecánica (así como el de comente alterna). Las aplicaciones de los motores de cd son en baja potencia, utilizándose en manipuladores robóticos, impresoras, máquinas de herramienta, en industrias dedicadas al procesamiento de alimentos, fotografia y de bebidas, en las dedicadas al procesamiento de maquinaria, aplicaciones específicas en transportadoras, líneas de ensamble, equipos de empaque, cribado de seda, hilado.
Los motores de cd se clasifican por la forma en que se excita el devanado de campo o inductor y el devanado de la armadura o inducido, a su vez se clasifican según la manera en cómo
27
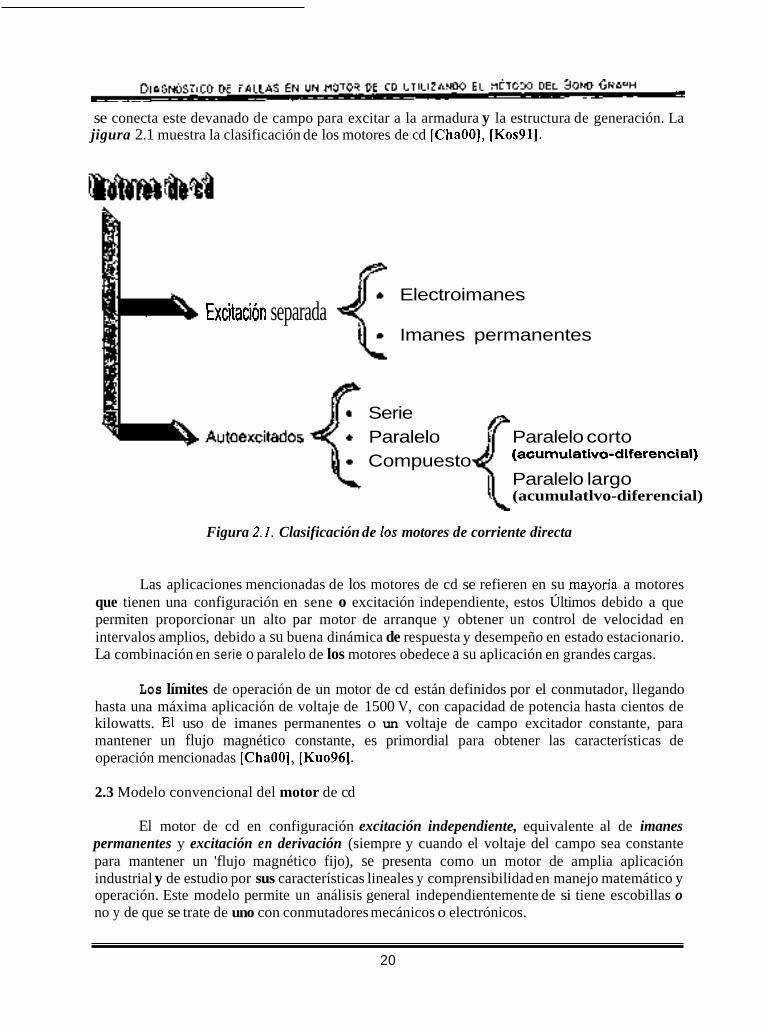
se conecta este devanado de campo para excitar a la armadura y la estructura de generación. La jigura 2.1 muestra la clasificación de los motores de cd [ChaOO], [Kos91].
Excitación separada Electroimanes
Imanes permanentes
Serie Paralelo Paralelo corto Compuesto
Paralelo largo (acumulatlvo-diferencia¡)
(acumulatlvo-diferencial)
Figura 2.1. Clasificación de los motores de corriente directa
Las aplicaciones mencionadas de los motores de cd se refieren en su mayoría a motores que tienen una configuración en sene o excitación independiente, estos Últimos debido a que permiten proporcionar un alto par motor de arranque y obtener un control de velocidad en intervalos amplios, debido a su buena dinámica de respuesta y desempeño en estado estacionario. La combinación en serie o paralelo de los motores obedece a su aplicación en grandes cargas.
Los límites de operación de un motor de cd están definidos por el conmutador, llegando hasta una máxima aplicación de voltaje de 1500 V, con capacidad de potencia hasta cientos de kilowatts. El uso de imanes permanentes o un voltaje de campo excitador constante, para mantener un flujo magnético constante, es primordial para obtener las características de operación mencionadas [ChaOOI, (Kuo961.
2.3 Modelo convencional del motor de cd
El motor de cd en configuración excitación independiente, equivalente al de imanes permanentes y excitación en derivación (siempre y cuando el voltaje del campo sea constante para mantener un 'flujo magnético fijo), se presenta como un motor de amplia aplicación industrial y de estudio por sus características lineales y comprensibilidad en manejo matemático y operación. Este modelo permite un análisis general independientemente de si tiene escobillas o no y de que se trate de uno con conmutadores mecánicos o electrónicos.
20
CAPíTULO 2: EL MOTOR DE CORRIENTE DIRECTA
(a) Armadura y rotor (b) Vista en perspectiva Figura 2.2. Motor de cd con imanes permanentes
L figuro 2.2 muestra los elementos principales de un motor de cd, cuyo comportamier o dinámico es natural para aplicaciones de alto desempeño, así como en la aplicación en servomecanismos obedece directamente a su comportamiento lineal.
Las características de operación lineal en que se diseñan los motores de cd permiten obtener una controlabilidad aceptable, ya que los cnntroladores obedecen a este comportamiento lineal, y como se verá en las ecuaciones deducidas enseguida, el control se obtiene y aplica directamente sobre los valores de entrada del sistema. Dicho control es debido a la incorporación del conmutador dentro del motor, que permite desarrollar un par que es proporcional a la comente de armadura, siempre y cuando la comente de campo se mantenga constante.
Este motor de cd es representado esquemáticamente mediante un circuito equivalente ilustrado en lafigura 2.3, en donde se utiliza una comente de campo i/ para excitar al devanado de campo, que induce un campo magnético permanente. En el devanado de armadura ha de circular una comente i,, que es mucho mayor que 9. Para describir el sistema se definen los parámetros del motor
Variable, parámetro Unidades u, = velocidad angular del motor rad/s p = constante de fricción viscosa N-m-shad i, = comente de armadura i / = comente de campo A
L,= inductancia de campo R-S
R,= resistencia de armadura R RJ= resistencia de campo R
A
R-s L, = inductancia de armadura
K, =constante de voltaje VIA-rads K,= constante del par motor J = constante de inercia kg-m2 z, = par electromagnético N-m z, = par de carga N-m
N d A 2
29
DIAGNÓSTICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
w 10
i- c,
8
,'
I
-... ~\''%> i;
j.. ,: .I
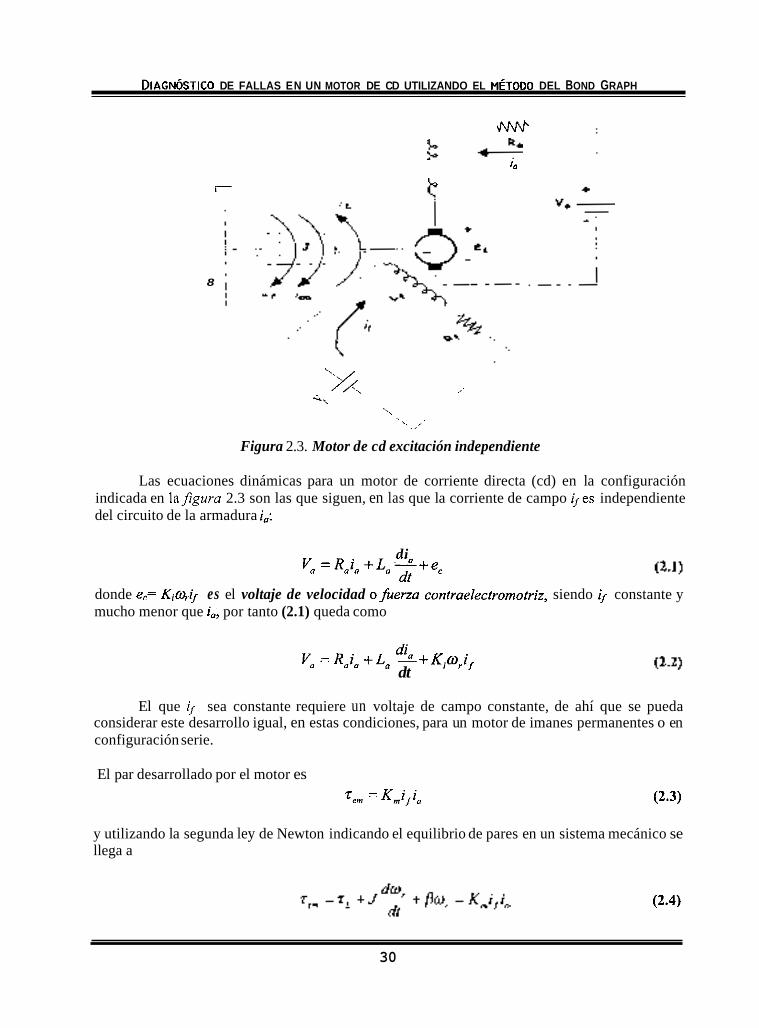
Figura 2.3. Motor de cd excitación independiente
Las ecuaciones dinámicas para un motor de corriente directa (cd) en la configuración indicada en lajigura 2.3 son las que siguen, en las que la corriente de campo kes independiente del circuito de la armadura io:
di, 111
V, =R,in+L,,-+ec _..
donde e,= K,m,i/ es el voltaje de velocidad ojüerza coniraeleciromotriz, siendo i/ constante y mucho menor que i,,, por tanto (2.1) queda como
dia Vo : Roi0 + L o - -k Kim,.', dt
El que i/ sea constante requiere un voltaje de campo constante, de ahí que se pueda considerar este desarrollo igual, en estas condiciones, para un motor de imanes permanentes o en configuración serie.
El par desarrollado por el motor es (2.3) zem : Kmi,ie
y utilizando la segunda ley de Newton indicando el equilibrio de pares en un sistema mecánico se llega a
(2.4)
30
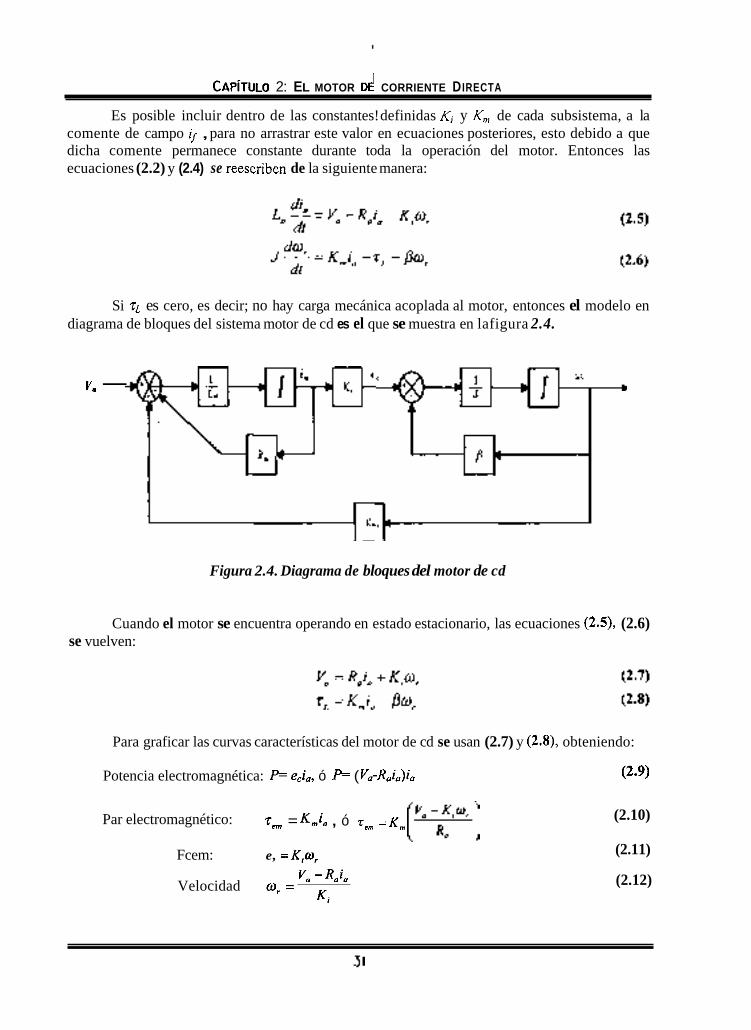
CAPíTULO 2: EL MOTOR Dd CORRIENTE DIRECTA
Es posible incluir dentro de las constantes! definidas Ki y K,,, de cada subsistema, a la comente de campo i, , para no arrastrar este valor en ecuaciones posteriores, esto debido a que dicha comente permanece constante durante toda la operación del motor. Entonces las ecuaciones (2.2) y (2.4) se reescriben de la siguiente manera:
Si ZL es cero, es decir; no hay carga mecánica acoplada al motor, entonces el modelo en diagrama de bloques del sistema motor de cd es el que se muestra en lafigura 2.4.
I. -
Figura 2.4. Diagrama de bloques del motor de cd
Cuando el motor se encuentra operando en estado estacionario, las ecuaciones (2.5), (2.6) se vuelven:
Para graficar las curvas características del motor de cd se usan (2.7) y (2.8), obteniendo:
Potencia electromagnética: P= e&, ó P= ( Vo-Roi&, (2.9)
(2.10)
(2.11)
(2.12)
Par electromagnético: z, = Kmi, , ó 5, - K,
Fcem: e, =Kim,
Velocidad w, = V, -Raiu
K;

D I A G N ~ S T I C O DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL METODO DEL BOND GRAP H
Los gráficos característicos de las variables de este motor se muestran en lafigura 2.5, que se obtienen usando las ecuaciones (2.9)-( 2.12), disponiendo de ellas según el par de variables o parámetros que se desee relacionar y observar su comportamiento. Estos gráficos sirven para determinar los puntos de operación del motor y con ello determinar su aplicación según la necesidad que se tenga. Los gráficos obtenidos son: curva par-velocidad, curva potencia- comente, curva par-comente y curva velocidad-corriente. Un análisis de comportamiento más profundo y con relaciones no lineales, se da en [ChaOO], IKos9lj.
40
,- . - i - - ..- - -
-500 , 70 y I
~ o w m 4 a Y ) w onfinte armadura
Cuni rcloddadu>manb
o Y) 100 150 m ZM 5% 559 4w o V.tOdd.d
, , , , _ . I . ,
o 5 1 0 1 5 2 0 2 5 3 0 3 5 . 0 4 5 ~ o 10 20 P 40 Y) w 70 80 COda"(a conienfs madm - Región de operación
Figura 2.5. (De izq-der. y arriba-abajo). Curva par-vel., curva pot-corriente, curva par-corriente, curva velocidad-corriente.
Bajo condiciones de operación en vacío, es decir, sin carga Q = O, la ecuación (2.6) se vuelve:
J-- dwr - K,i, - ow, di
(2.13)
Utilizando (2.5) y (2.13) se obtiene la representación en variables de estado del sistema motor de cd, tomando como variables de estado a la velocidad a, y la comente io:
.+
(2.14)
Las salidas son las mismas variables de estado del sistema, o sea, la comente de armadura
Los valores que se usarán a lo largo de esta tesis para simulación, comprobación y
y la velocidad de rotor (io, a, respectivamente).
validación de resultados son los siguientes [HP94]:
32
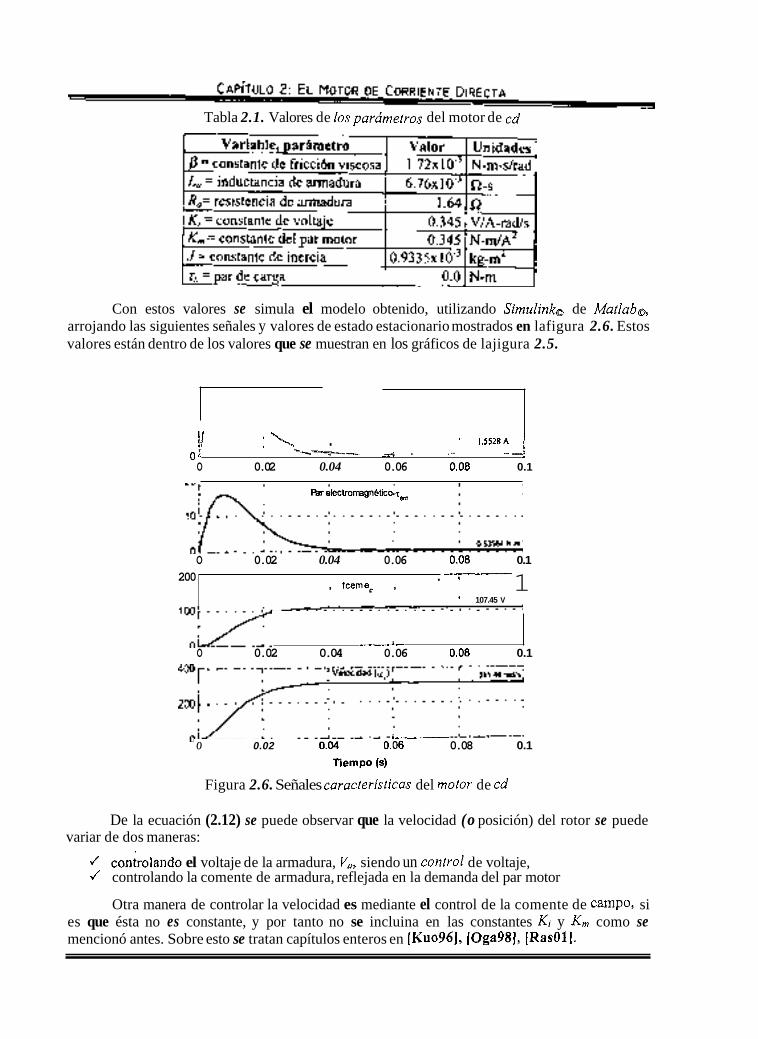
Tabla 2.1. Valores de losparámeiros del motor de cd
Con estos valores se simula el modelo obtenido, utilizando Sirnulink0 de Maflaba arrojando las siguientes señales y valores de estado estacionario mostrados en lafigura 2.6. Estos valores están dentro de los valores que se muestran en los gráficos de lajigura 2.5.
' 1.5528A ' --. --. , ~ . . - - .... 1 I! : \ .
0 i O 0.02 0.04 0.06 0.08 0.1
Pa slecbomagn&tko.í_
O 0.02 0.04 0.06 0.08 0.1
1 200 . --r----- , fceme. , ' 107.45 V
_L
O 0.02 0.04 0.06 0.08 0.1
- O 0.02 0.04 0.06 0.08 0.1
iiempo (s)
Figura 2.6. Señales caracterísiicas del moior de cd
De la ecuación (2.12) se puede observar que la velocidad (o posición) del rotor se puede variar de dos maneras:
J conkolando el voltaje de la armadura, V,, siendo un confrol de voltaje, J controlando la comente de armadura, reflejada en la demanda del par motor
Otra manera de controlar la velocidad es mediante el control de la comente de campo, si es que ésta no es constante, y por tanto no se incluina en las constantes Ki y K, como se mencionó antes. Sobre esto se tratan capítulos enteros en (Kuo961, (Oga981, [RasOll.
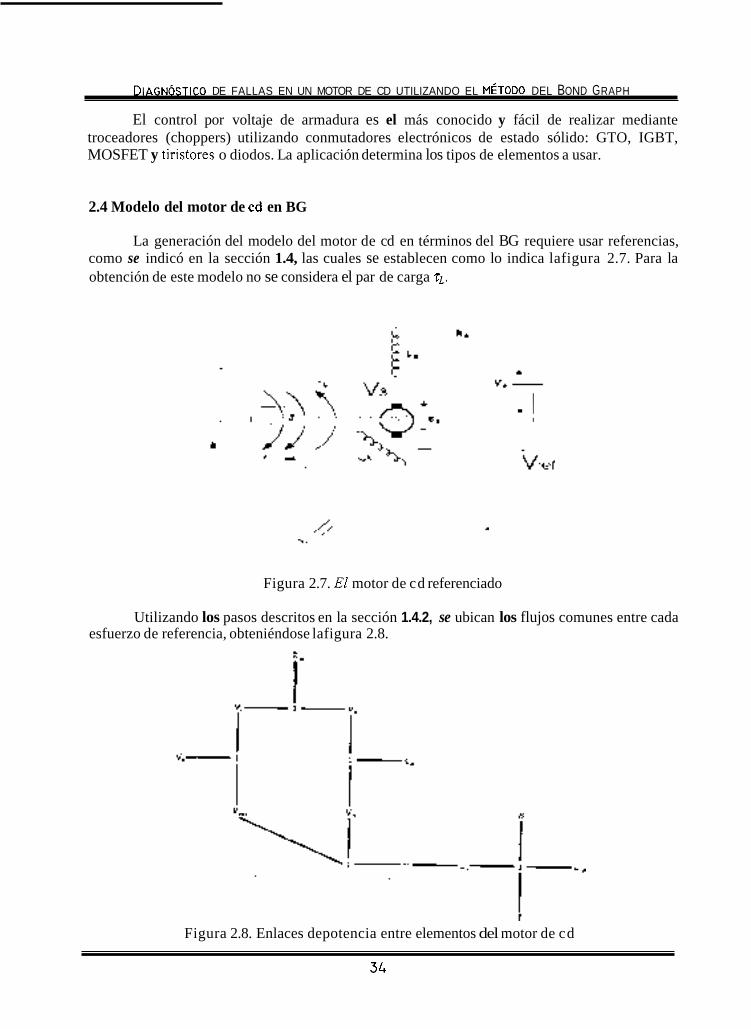
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
El control por voltaje de armadura es el más conocido y fácil de realizar mediante troceadores (choppers) utilizando conmutadores electrónicos de estado sólido: GTO, IGBT, MOSFET y tiristores o diodos. La aplicación determina los tipos de elementos a usar.
2.4 Modelo del motor de ed en BG
La generación del modelo del motor de cd en términos del BG requiere usar referencias, como se indicó en la sección 1.4, las cuales se establecen como lo indica lafigura 2.7. Para la obtención de este modelo no se considera el par de carga ZL.
- !
Figura 2.7. El motor de cd referenciado
Utilizando los pasos descritos en la sección 1.4.2, se ubican los flujos comunes entre cada esfuerzo de referencia, obteniéndose lafigura 2.8.
Figura 2.8. Enlaces depotencia entre elementos del motor de cd
54
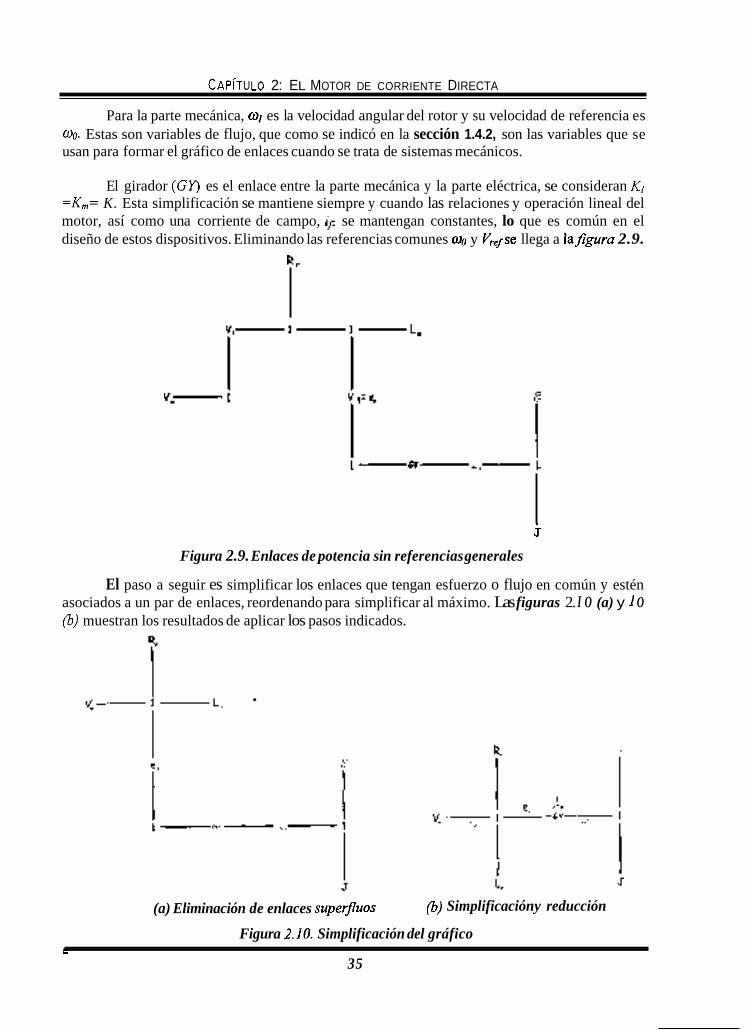
CAPíTULO 2: EL MOTOR DE CORRIENTE DIRECTA
Para la parte mecánica, W/ es la velocidad angular del rotor y su velocidad de referencia es 00. Estas son variables de flujo, que como se indicó en la sección 1.4.2, son las variables que se usan para formar el gráfico de enlaces cuando se trata de sistemas mecánicos.
El girador (CY) es el enlace entre la parte mecánica y la parte eléctrica, se consideran K, =Km= K. Esta simplificación se mantiene siempre y cuando las relaciones y operación lineal del motor, así como una corriente de campo, se mantengan constantes, lo que es común en el diseño de estos dispositivos. Eliminando las referencias comunes 0.10 y Vr+se llega a ia$gura 2.9.
i Figura 2.9. Enlaces de potencia sin referencias generales
El paso a seguir es simplificar los enlaces que tengan esfuerzo o flujo en común y estén asociados a un par de enlaces, reordenando para simplificar al máximo. Las figuras 2. I O (a) y 1 O (b) muestran los resultados de aplicar los pasos indicados.
(a) Eliminación de enlaces superfluos (b) Simplificación y reducción
Figura 2.10. Simplificación del gráfico
35 T
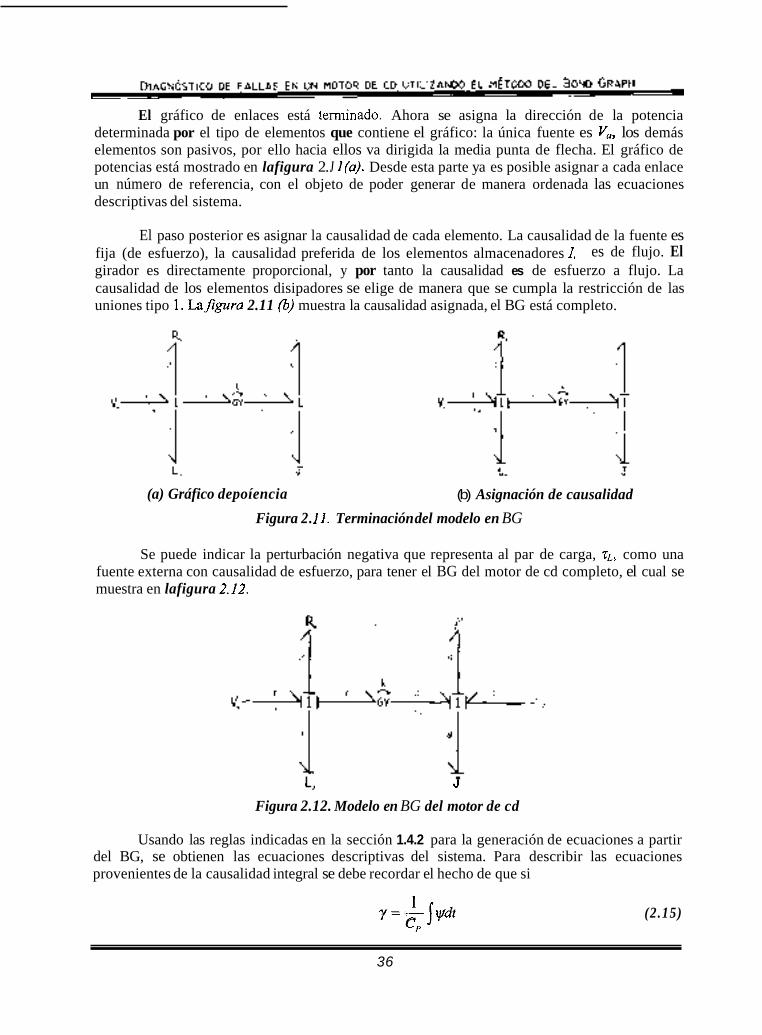
El gráfico de enlaces está terminado. Ahora se asigna la dirección de la potencia determinada por el tipo de elementos que contiene el gráfico: la única fuente es Va, los demás elementos son pasivos, por ello hacia ellos va dirigida la media punta de flecha. El gráfico de potencias está mostrado en lafigura 2. J J(a). Desde esta parte ya es posible asignar a cada enlace un número de referencia, con el objeto de poder generar de manera ordenada las ecuaciones descriptivas del sistema.
El paso posterior es asignar la causalidad de cada elemento. La causalidad de la fuente es fija (de esfuerzo), la causalidad preferida de los elementos almacenadores I, es de flujo. El girador es directamente proporcional, y por tanto la causalidad es de esfuerzo a flujo. La causalidad de los elementos disipadores se elige de manera que se cumpla la restricción de las uniones tipo 1. Lafigura 2.11 (6) muestra la causalidad asignada, el BG está completo.
(a) Gráfico depoíencia (b) Asignación de causalidad Figura 2. J l . Terminación del modelo en BG
Se puede indicar la perturbación negativa que representa al par de carga, TL, como una fuente externa con causalidad de esfuerzo, para tener el BG del motor de cd completo, el cual se muestra en lafigura 2.12.
J
Figura 2.12. Modelo en BG del motor de cd
Usando las reglas indicadas en la sección 1.4.2 para la generación de ecuaciones a partir del BG, se obtienen las ecuaciones descriptivas del sistema. Para describir las ecuaciones provenientes de la causalidad integral se debe recordar el hecho de que si
1 r = - J v d t (2.15)
CP
36
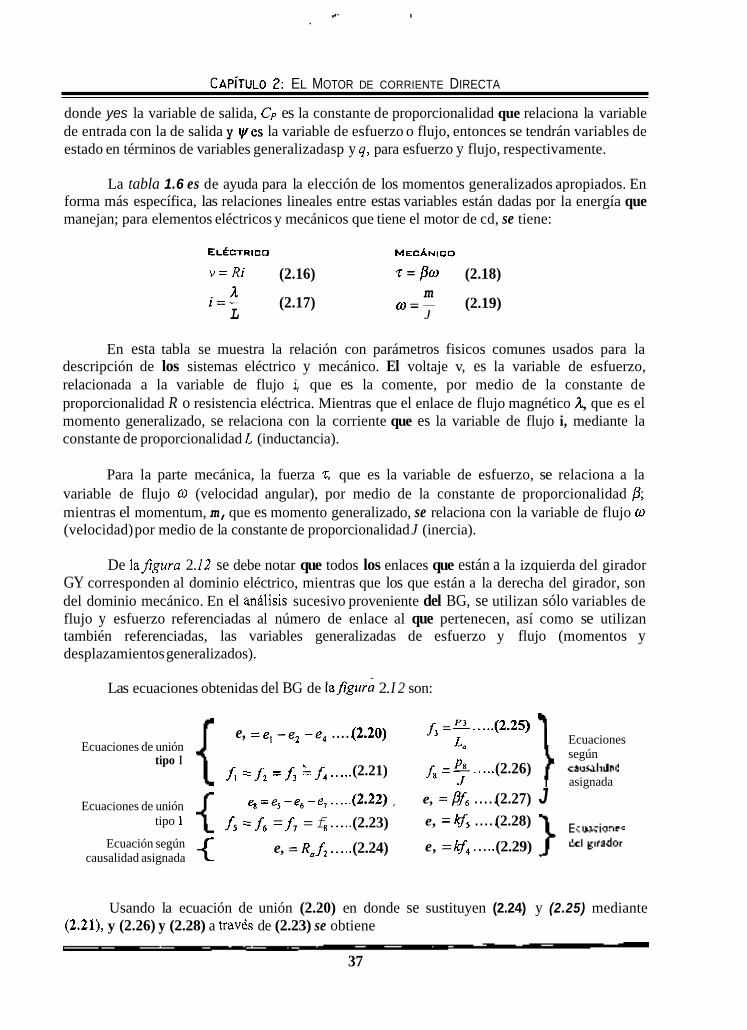
CAPíTULO 2: EL MOTOR DE CORRIENTE DIRECTA
donde yes la variable de salida, C p es la constante de proporcionalidad que relaciona la variable de entrada con la de salida y y e s la variable de esfuerzo o flujo, entonces se tendrán variables de estado en términos de variables generalizadasp y q, para esfuerzo y flujo, respectivamente.
La tabla 1.6 es de ayuda para la elección de los momentos generalizados apropiados. En forma más específica, las relaciones lineales entre estas variables están dadas por la energía que manejan; para elementos eléctricos y mecánicos que tiene el motor de cd, se tiene:
ELÉCTRICD MECANICQ
v = R i (2.16) T = pw (2.18)
(2.17) , A L
I = - m J
W = - (2.19)
En esta tabla se muestra la relación con parámetros fisicos comunes usados para la descripción de los sistemas eléctrico y mecánico. El voltaje v, es la variable de esfuerzo, relacionada a la variable de flujo i, que es la comente, por medio de la constante de proporcionalidad R o resistencia eléctrica. Mientras que el enlace de flujo magnético A, que es el momento generalizado, se relaciona con la corriente que es la variable de flujo i, mediante la constante de proporcionalidad L (inductancia).
Para la parte mecánica, la fuerza z, que es la variable de esfuerzo, se relaciona a la variable de flujo w (velocidad angular), por medio de la constante de proporcionalidad p; mientras el momentum, m, que es momento generalizado, se relaciona con la variable de flujo w (velocidad) por medio de la constante de proporcionalidad J (inercia).
De lajiguru 2. I2 se debe notar que todos los enlaces que están a la izquierda del girador GY corresponden al dominio eléctrico, mientras que los que están a la derecha del girador, son del dominio mecánico. En el aniilisis sucesivo proveniente del BG, se utilizan sólo variables de flujo y esfuerzo referenciadas al número de enlace al que pertenecen, así como se utilizan también referenciadas, las variables generalizadas de esfuerzo y flujo (momentos y desplazamientos generalizados).
Las ecuaciones obtenidas del BG de lafiguru 2. I 2 son:
Ecuaciones según
asignada
P e, = e , -ez -e4 ..... (2.20)
f, = f, = f, i1 f, _.__. (2.21)
f, = 2 . . . - ( 2 . 2 5 ) L.?
8 - J f - k _.... (2.26)
Ecuaciones de unión tipo I
% = e , - e , - e ,..... ( 2 . 2 ~ ) ~ f, = f, = f, = f 8 . . . . . (2.23)
e, =R,f, ._... (2.24)
e, = ~ r , ..... (2.27) J e, =y, ..... (2.28)
e, = y4 _.... (2.29)
Ecuaciones de unión tipo 1
Ecuación según causalidad asignada <
Usando la ecuación de unión (2.20) en donde se sustituyen (2.24) y (2.25) mediante (2.21), y (2.26) y (2.28) a traves de (2.23) se obtiene
37
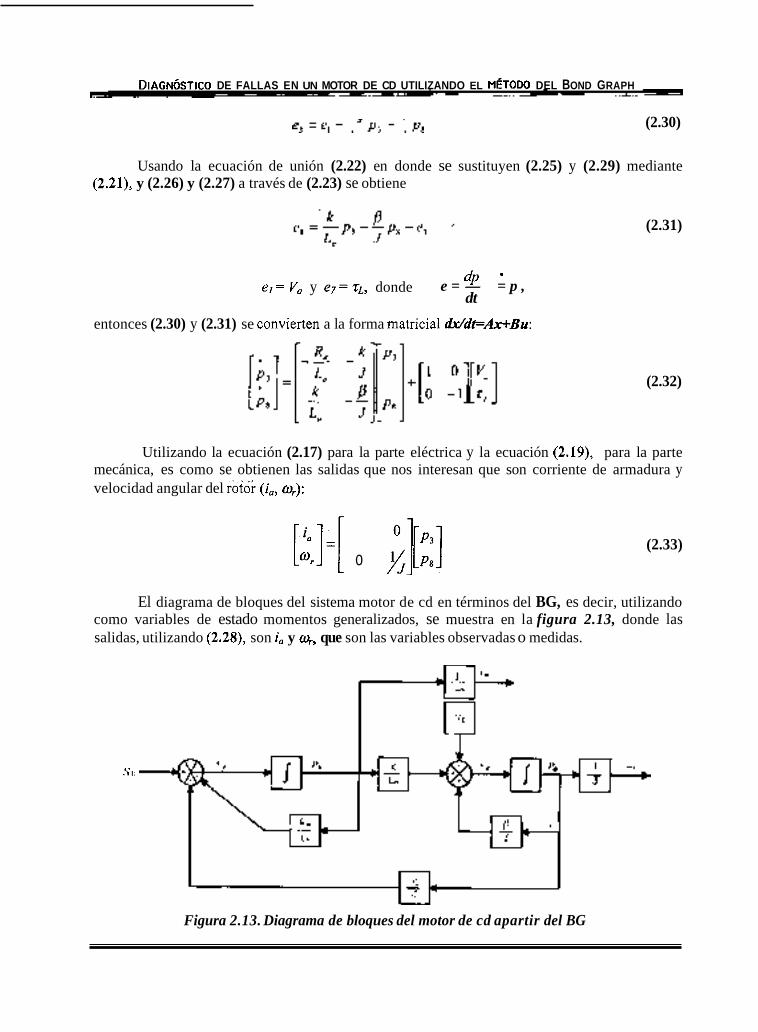
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
(2.30)
Usando la ecuación de unión (2.22) en donde se sustituyen (2.25) y (2.29) mediante (2.21), y (2.26) y (2.27) a través de (2.23) se obtiene
dP * e,= Va y e,=zL, donde e =- = p , dt
entonces (2.30) y (2.31) se convierten a la forma matricial dr/dt=Ax+Bu:
(2.31)
(2.32)
Utilizando la ecuación (2.17) para la parte eléctrica y la ecuación (2.19), para la parte mecánica, es como se obtienen las salidas que nos interesan que son corriente de armadura y velocidad angular del rot& (ia, y):
[:I=[ o ,][;:I (2.33)
El diagrama de bloques del sistema motor de cd en términos del BG, es decir, utilizando como variables de estado momentos generalizados, se muestra en la figura 2.13, donde las salidas, utilizando (2.28), son io y a, que son las variables observadas o medidas.
Si.
Figura 2.13. Diagrama de bloques del motor de cd apartir del BG
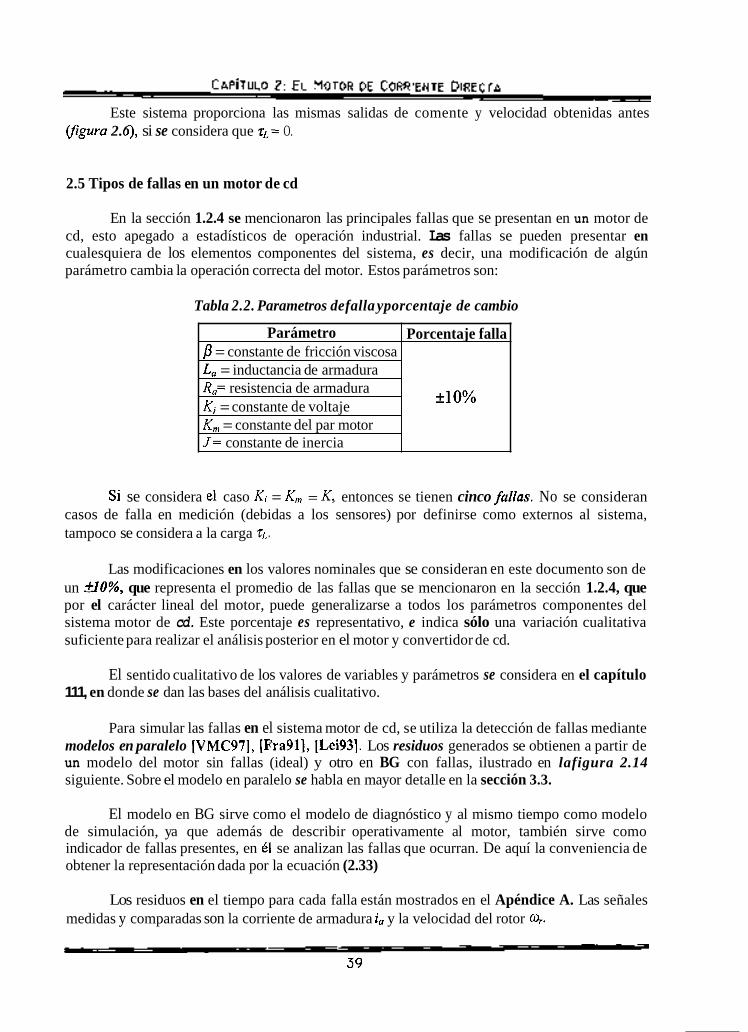
Este sistema proporciona las mismas salidas de comente y velocidad obtenidas antes @gura 2. ú), si se considera que TL= O.
Parámetro /3 = constante de fricción viscosa Lo = inductancia de armadura R,= resistencia de armadura Ki = constante de voltaje K,,, = constante del par motor J = constante de inercia
2.5 Tipos de fallas en un motor de cd
En la sección 1.2.4 se mencionaron las principales fallas que se presentan en un motor de cd, esto apegado a estadísticos de operación industrial. Las fallas se pueden presentar en cualesquiera de los elementos componentes del sistema, es decir, una modificación de algún parámetro cambia la operación correcta del motor. Estos parámetros son:
Tabla 2.2. Parametros de falla yporcentaje de cambio
Porcentaje falla
*lo%
Si se considera el caso Ki = K,,, = K, entonces se tienen cinco fullus. No se consideran casos de falla en medición (debidas a los sensores) por definirse como externos al sistema, tampoco se considera a la carga TL.
Las modificaciones en los valores nominales que se consideran en este documento son de un BO%, que representa el promedio de las fallas que se mencionaron en la sección 1.2.4, que por el carácter lineal del motor, puede generalizarse a todos los parámetros componentes del sistema motor de cd. Este porcentaje es representativo, e indica sólo una variación cualitativa suficiente para realizar el análisis posterior en el motor y convertidor de cd.
El sentido cualitativo de los valores de variables y parámetros se considera en el capítulo 111, en donde se dan las bases del análisis cualitativo.
Para simular las fallas en el sistema motor de cd, se utiliza la detección de fallas mediante modelos en paralelo [VMC97], (Fra911, [Lei93]. Los residuos generados se obtienen a partir de un modelo del motor sin fallas (ideal) y otro en BG con fallas, ilustrado en lafigura 2.14 siguiente. Sobre el modelo en paralelo se habla en mayor detalle en la sección 3.3.
El modelo en BG sirve como el modelo de diagnóstico y al mismo tiempo como modelo de simulación, ya que además de describir operativamente al motor, también sirve como indicador de fallas presentes, en él se analizan las fallas que ocurran. De aquí la conveniencia de obtener la representación dada por la ecuación (2.33)
Los residuos en el tiempo para cada falla están mostrados en el Apéndice A. Las señales medidas y comparadas son la corriente de armadura io y la velocidad del rotor @.
59
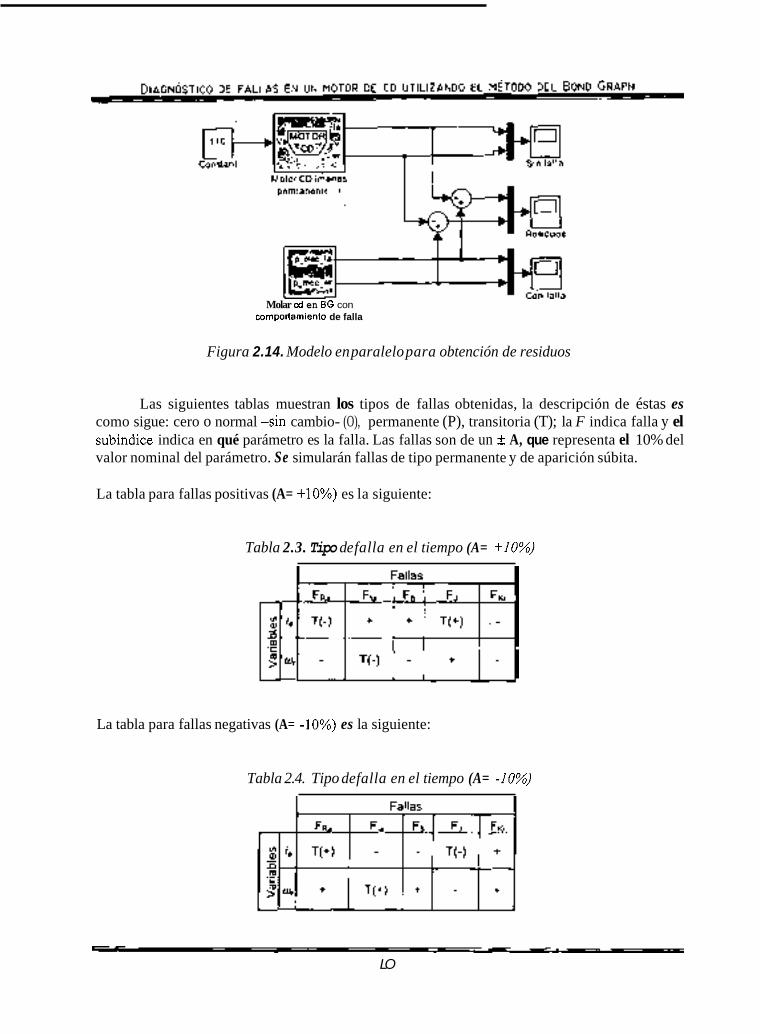
Molar cd en BG con ~rnpoltamiento de falla
Figura 2.14. Modelo en paralelo para obtención de residuos
Las siguientes tablas muestran los tipos de fallas obtenidas, la descripción de éstas es como sigue: cero o normal -sin cambio- (O), permanente (P), transitoria (T); la F indica falla y el subíndice indica en qué parámetro es la falla. Las fallas son de un k A, que representa el 10% del valor nominal del parámetro. Se simularán fallas de tipo permanente y de aparición súbita.
La tabla para fallas positivas (A= +lo%) es la siguiente:
Tabla 2.3. Tipo de falla en el tiempo (A= +IO%)
La tabla para fallas negativas (A= -10%) es la siguiente:
Tabla 2.4. Tipo de falla en el tiempo (A= -10%)
LO
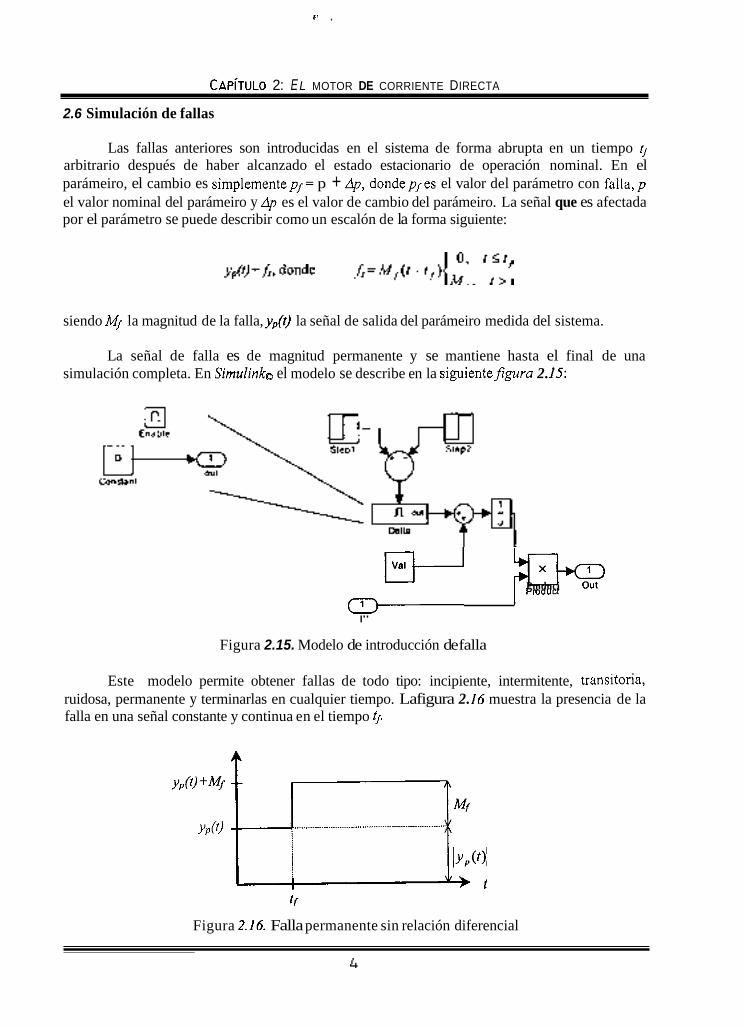
" ,
CAPíTULO 2: EL MOTOR DE CORRIENTE DIRECTA
2.6 Simulación de fallas
Las fallas anteriores son introducidas en el sistema de forma abrupta en un tiempo t, arbitrario después de haber alcanzado el estado estacionario de operación nominal. En el parámeiro, el cambio es simplementep/= p + Ap, dondepfes el valor del parámetro con falla,p el valor nominal del parámeiro y Ap es el valor de cambio del parámeiro. La señal que es afectada por el parámetro se puede describir como un escalón de la forma siguiente:
siendo Mf la magnitud de la falla, yp(!, la señal de salida del parámeiro medida del sistema.
La señal de falla es de magnitud permanente y se mantiene hasta el final de una simulación completa. En Sirnulink0 el modelo se describe en la siguientefigura 2. f5:
mw p Pmduci
I"
Figura 2.15. Modelo de introducción de falla
Este modelo permite obtener fallas de todo tipo: incipiente, intermitente, transitoria, ruidosa, permanente y terminarlas en cualquier tiempo. Lafigura 2. I6 muestra la presencia de la falla en una señal constante y continua en el tiempo 9.
! ! lYP(t)l 1
&-I; YP(t)+M/
YP(0
Ir Figura 2.16. Falla permanente sin relación diferencial
DIAGN~STICO DE FALLAS EN UN MOTOR DE CO UTILIZANDO EL MÉTODO DEL BOND GRAPH ...
2.7 Conclusión
Se ha presentado una descripción gross0 modo del motor, de cd. Se trata de un sistema ligero en cuanto a tratamiento matemático, de ahí que no se haya profundizado en la obtención y explicación de cada elemento que caracteriza su funcionamiento y principio. Todo fue encaminado a presentarlo como un sistema cuya operación permite ser entendida de manera sencilla, para después mapearlo a términos del BG, con relaciones matemáticas lineales.
Hasta ahora, se tiene un modelo en BG del motor de cd que opera en simulación de manera idéntica al modelo “convencional” presentado en todos los libros sobre motores de cd. Con esto se tiene elaborado el primer bloque del método de diagnóstico propuesto que se presenta en el capítulo que sigue, forma parte de la aplicación al caso estudio convertidor-motor de cd.
Se mostró que es posible trasladar la operación fisica de un sistema a un modelo matemático desde un inicio, en términos causales del BG y con ello, poder describirlo de manera fiel y segura, y al mismo tiempo, poder explotar el modelo para aplicaciones de diagnóstico, lo cual en el capítulo posterior, se describe de manera secuencial, como el método propuesto y objetivo principal de esta tesis, empleando sólo elementos del BG.
42
CAP~TULO 3: DIAGN~STICO DE FALLAS MEDIANTE BG
Capítulo 3 Diagnóstico de fallas mediante Bond Graph
3.1 Introducción
El BG ha sido utilizado por vanos investigadores para justificar relaciones causales generales que permitan aplicaciones de control, diagnóstico, modelado y simulación, entre otros, con el fin de unificar las metodologías existentes, haciendo secuencia1 y general la aplicación de las mismas sin importar la naturaleza de los sistemas fisicos.
En este capítulo se muestra el método de diagnóstico propuesto para aplicación general, utilizando estudios realizados por otros investigadores que han trabajado con BG enfocado al diagnóstico. Se incorporan estas investigaciones y se ordenan de tal manera que aporten una nueva manera de aplicar el BG en el diagnóstico de fallas.
En la sección 3.2 se presenta un breve resumen de lo que se ha realizado utilizando BG en diagnóstico de fallas y el método que se propone en esta tesis para dicho fin, empleando sólo elementos del BG. Las secciones 3.3 y 3.4 presentan las herramientas con las que se aplica y entiende mejor el método de diagnóstico que se propone.
De la sección 3.5 a la sección 3.7 se explican cada uno de los bloques componentes del sistema de diagnóstico propuesto. En la sección 3.7.1 se presenta un estudio que reune información con la que se establecen las condiciones para tener criterios con los cuales aplicar de manera correcta el método propuesto.
En la sección 3.8 se presentan las condiciones de simulación que se deben considerar para aplicar el método. El capitulo finaliza con una conclusión presentada en la sección 3.9.
3.2 Bond Graph y diagnóstico de fallas
La intención de usar el BG para desarrollar sistemas de diagnóstico radica en la generalización de un método, mediante la unificación de las metodologías cualitativa y cuantitativa como se sugiere en (Pat971, [ChP991. Se busca que sea posible aplicar los métodos de detección más comunes al modelo que representa al sistema y determinar la falla de manera rápida y sencilla mediante el uso de relaciones directas de componentes, sin el uso de más modelos de diagnóstico y principalmente, que sea general.
La mayoría de los autores que han empleado el BG con fines de diagnóstico para modelar al sistema, aplican sus metodologías a sistemas hidráulicos y de ahí concluyen que su aplicación
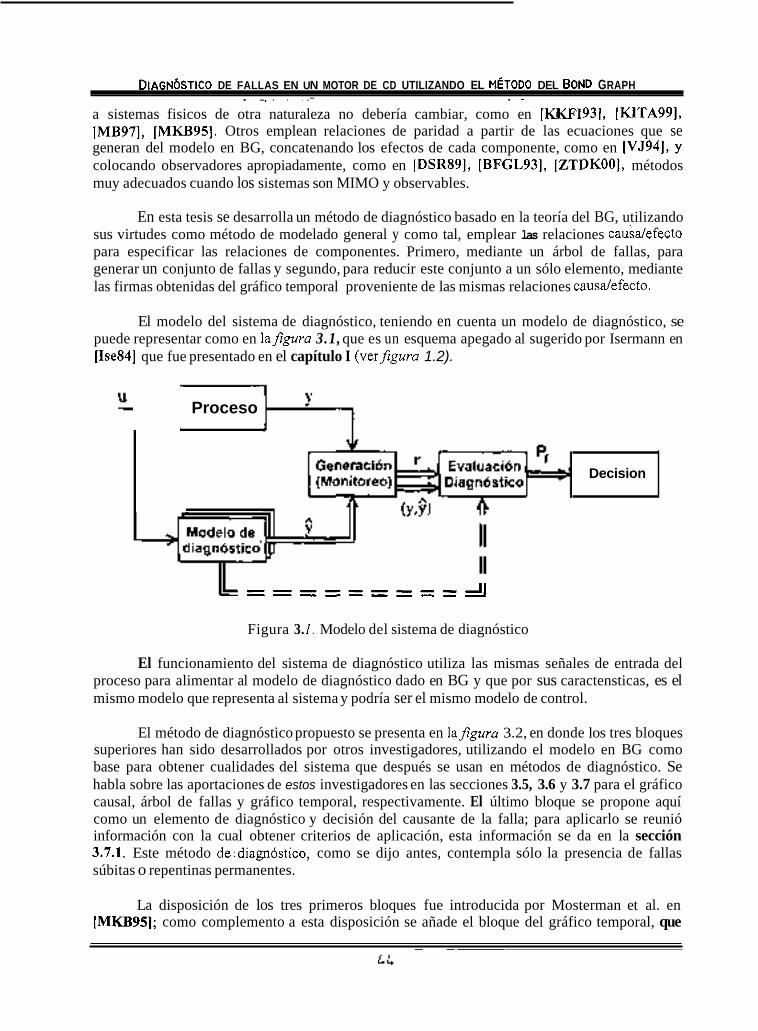
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
a sistemas fisicos de otra naturaleza no debería cambiar, como en [KKFI93], liaTA991, [MB97], [MKB95]. Otros emplean relaciones de paridad a partir de las ecuaciones que se generan del modelo en BG, concatenando los efectos de cada componente, como en IVJ941, Y colocando observadores apropiadamente, como en [DSR89], [BFGL93], [ZTDKOO], métodos muy adecuados cuando los sistemas son MIMO y observables.
. . . . , .- . ~.
En esta tesis se desarrolla un método de diagnóstico basado en la teoría del BG, utilizando sus virtudes como método de modelado general y como tal, emplear las relaciones causdefecto para especificar las relaciones de componentes. Primero, mediante un árbol de fallas, para generar un conjunto de fallas y segundo, para reducir este conjunto a un sólo elemento, mediante las firmas obtenidas del gráfico temporal proveniente de las mismas relaciones causakfecto.
El modelo del sistema de diagnóstico, teniendo en cuenta un modelo de diagnóstico, se puede representar como en lafigura 3.1, que es un esquema apegado al sugerido por Isermann en [Ise84] que fue presentado en el capítulo I (ver$gura 1.2).
Proceso
Decision
4 --------- - - - - _ _ _ _ _ Figura 3. I. Modelo del sistema de diagnóstico
El funcionamiento del sistema de diagnóstico utiliza las mismas señales de entrada del proceso para alimentar al modelo de diagnóstico dado en BG y que por sus caractensticas, es el mismo modelo que representa al sistema y podría ser el mismo modelo de control.
El método de diagnóstico propuesto se presenta en la$gura 3.2, en donde los tres bloques superiores han sido desarrollados por otros investigadores, utilizando el modelo en BG como base para obtener cualidades del sistema que después se usan en métodos de diagnóstico. Se habla sobre las aportaciones de estos investigadores en las secciones 3.5, 3.6 y 3.7 para el gráfico causal, árbol de fallas y gráfico temporal, respectivamente. El último bloque se propone aquí como un elemento de diagnóstico y decisión del causante de la falla; para aplicarlo se reunió información con la cual obtener criterios de aplicación, esta información se da en la sección 3.7.1. Este método de:diagnóstico, como se dijo antes, contempla sólo la presencia de fallas súbitas o repentinas permanentes.
La disposición de los tres primeros bloques fue introducida por Mosterman et al. en [MKB951; como complemento a esta disposición se añade el bloque del gráfico temporal, que
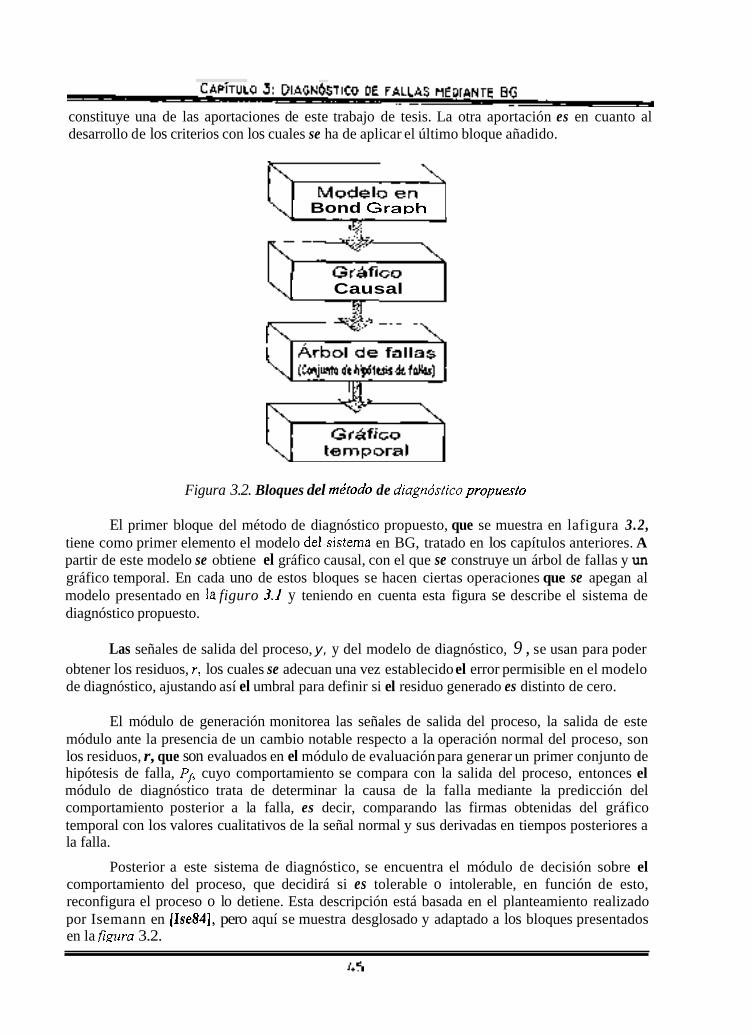
constituye una de las aportaciones de este trabajo de tesis. La otra aportación es en cuanto al desarrollo de los criterios con los cuales se ha de aplicar el último bloque añadido.
Bond GraDh
Causal
Figura 3.2. Bloques del miiodo de diagnósiico propuesio
El primer bloque del método de diagnóstico propuesto, que se muestra en lafigura 3.2, tiene como primer elemento el modelo del.sistema en BG, tratado en los capítulos anteriores. A partir de este modelo se obtiene el gráfico causal, con el que se construye un árbol de fallas y un gráfico temporal. En cada uno de estos bloques se hacen ciertas operaciones que se apegan al modelo presentado en ia figuro 3.i y teniendo en cuenta esta figura se describe el sistema de diagnóstico propuesto.
Las señales de salida del proceso, y, y del modelo de diagnóstico, 9 , se usan para poder obtener los residuos, r, los cuales se adecuan una vez establecido el error permisible en el modelo de diagnóstico, ajustando así el umbral para definir si el residuo generado es distinto de cero.
El módulo de generación monitorea las señales de salida del proceso, la salida de este módulo ante la presencia de un cambio notable respecto a la operación normal del proceso, son los residuos, r, que son evaluados en el módulo de evaluación para generar un primer conjunto de hipótesis de falla, Pfi cuyo comportamiento se compara con la salida del proceso, entonces el módulo de diagnóstico trata de determinar la causa de la falla mediante la predicción del comportamiento posterior a la falla, es decir, comparando las firmas obtenidas del gráfico temporal con los valores cualitativos de la señal normal y sus derivadas en tiempos posteriores a la falla.
Posterior a este sistema de diagnóstico, se encuentra el módulo de decisión sobre el comportamiento del proceso, que decidirá si es tolerable o intolerable, en función de esto, reconfigura el proceso o lo detiene. Esta descripción está basada en el planteamiento realizado por Isemann en (Ise841, pero aquí se muestra desglosado y adaptado a los bloques presentados en la f imra 3.2.
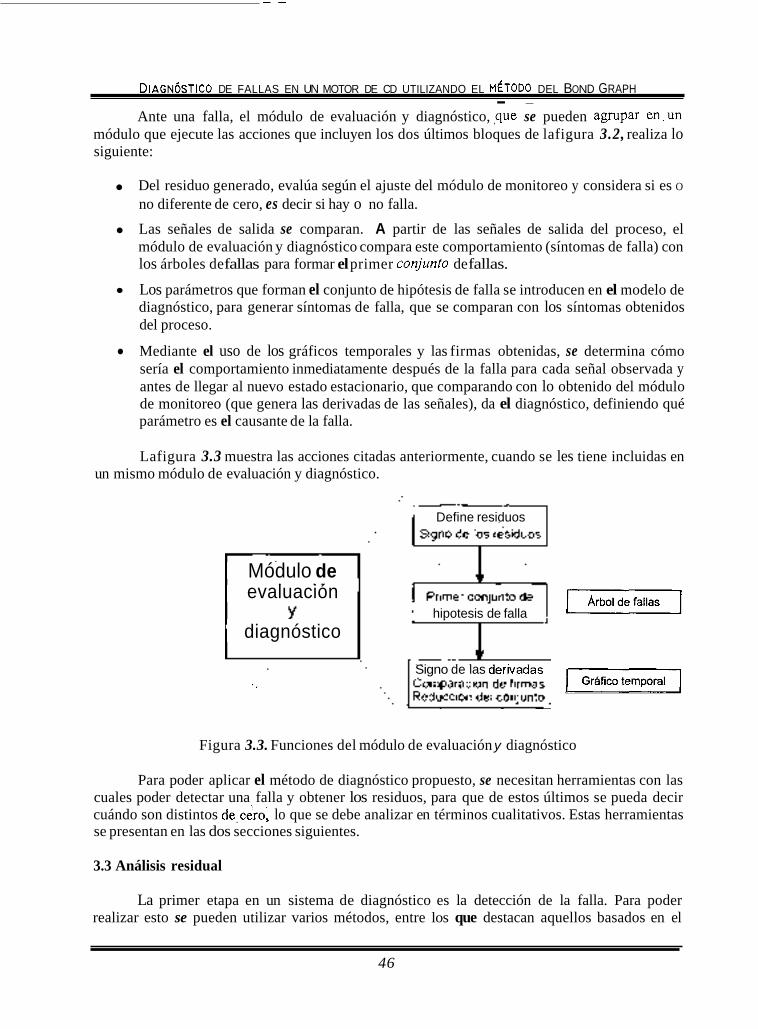
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH I .
Ante una falla, el módulo de evaluación y diagnóstico, ,que se pueden agmpar~en.un módulo que ejecute las acciones que incluyen los dos últimos bloques de lafigura 3.2, realiza lo siguiente:
Del residuo generado, evalúa según el ajuste del módulo de monitoreo y considera si es O
no diferente de cero, es decir si hay o no falla.
Las señales de salida se comparan. A partir de las señales de salida del proceso, el módulo de evaluación y diagnóstico compara este comportamiento (síntomas de falla) con los árboles de fallas para formar el primer conjunfo de fallas.
Los parámetros que forman el conjunto de hipótesis de falla se introducen en el modelo de diagnóstico, para generar síntomas de falla, que se comparan con los síntomas obtenidos del proceso.
Mediante el uso de los gráficos temporales y las firmas obtenidas, se determina cómo sería el comportamiento inmediatamente después de la falla para cada señal observada y antes de llegar al nuevo estado estacionario, que comparando con lo obtenido del módulo de monitoreo (que genera las derivadas de las señales), da el diagnóstico, definiendo qué parámetro es el causante de la falla.
Lafigura 3.3 muestra las acciones citadas anteriormente, cuando se les tiene incluidas en un mismo módulo de evaluación y diagnóstico.
Define residuos
Módulo de evaluación
diagnóstico 1-1
, , 1-
hipotesis de falla
Signo de las deriadas
Figura 3.3. Funciones del módulo de evaluación y diagnóstico
Para poder aplicar el método de diagnóstico propuesto, se necesitan herramientas con las cuales poder detectar una falla y obtener los residuos, para que de estos últimos se pueda decir cuándo son distintos de,cero, lo que se debe analizar en términos cualitativos. Estas herramientas se presentan en las dos secciones siguientes.
3.3 Análisis residual
La primer etapa en un sistema de diagnóstico es la detección de la falla. Para poder realizar esto se pueden utilizar varios métodos, entre los que destacan aquellos basados en el
46
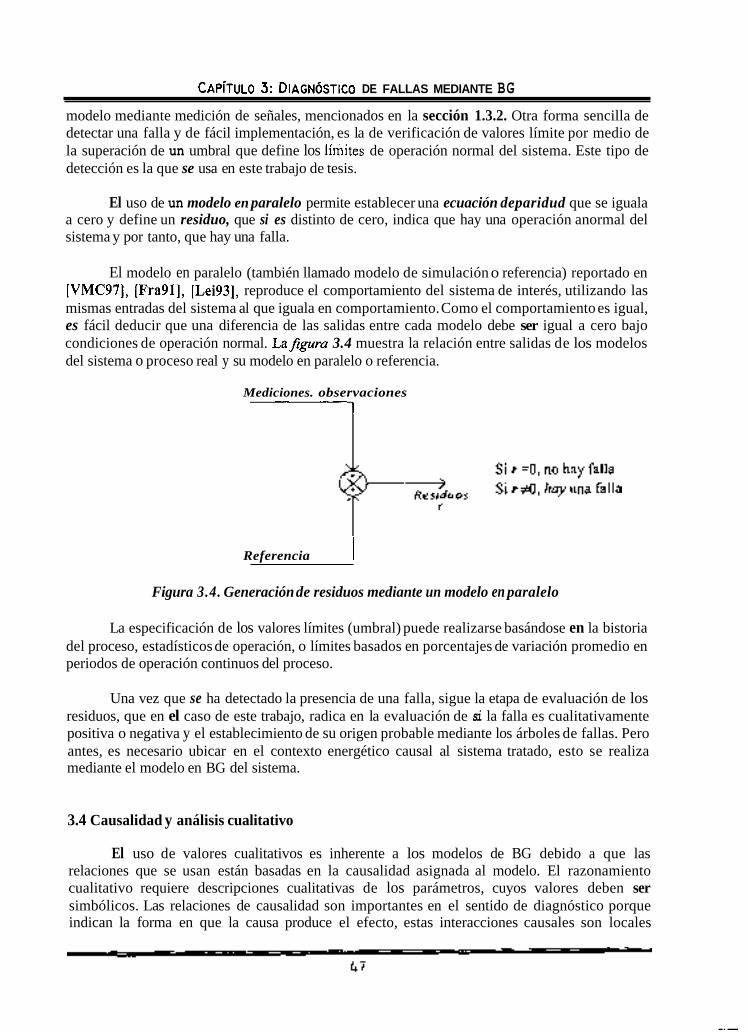
CAP¡TULO 3: DIAGNÓSTICO DE FALLAS MEDIANTE BG
modelo mediante medición de señales, mencionados en la sección 1.3.2. Otra forma sencilla de detectar una falla y de fácil implementación, es la de verificación de valores límite por medio de la superación de un umbral que define los límites de operación normal del sistema. Este tipo de detección es la que se usa en este trabajo de tesis.
El uso de un modelo en paralelo permite establecer una ecuación deparidud que se iguala a cero y define un residuo, que si es distinto de cero, indica que hay una operación anormal del sistema y por tanto, que hay una falla.
El modelo en paralelo (también llamado modelo de simulación o referencia) reportado en [VMC97], (Fra911, [Lei93], reproduce el comportamiento del sistema de interés, utilizando las mismas entradas del sistema al que iguala en comportamiento. Como el comportamiento es igual, es fácil deducir que una diferencia de las salidas entre cada modelo debe ser igual a cero bajo condiciones de operación normal. Lafigura 3.4 muestra la relación entre salidas de los modelos del sistema o proceso real y su modelo en paralelo o referencia.
Mediciones. observaciones 7
Referencia I Figura 3.4. Generación de residuos mediante un modelo en paralelo
La especificación de los valores límites (umbral) puede realizarse basándose en la bistoria del proceso, estadísticos de operación, o límites basados en porcentajes de variación promedio en periodos de operación continuos del proceso.
Una vez que se ha detectado la presencia de una falla, sigue la etapa de evaluación de los residuos, que en el caso de este trabajo, radica en la evaluación de si la falla es cualitativamente positiva o negativa y el establecimiento de su origen probable mediante los árboles de fallas. Pero antes, es necesario ubicar en el contexto energético causal al sistema tratado, esto se realiza mediante el modelo en BG del sistema.
3.4 Causalidad y análisis cualitativo
El uso de valores cualitativos es inherente a los modelos de BG debido a que las relaciones que se usan están basadas en la causalidad asignada al modelo. El razonamiento cualitativo requiere descripciones cualitativas de los parámetros, cuyos valores deben ser simbólicos. Las relaciones de causalidad son importantes en el sentido de diagnóstico porque indican la forma en que la causa produce el efecto, estas interacciones causales son locales

DlAGN6STlCO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
debido a que existen sólo entre parámetros y variables de estado que son comunes en una parte del modelo.
Cuando se habla de mediciones cualitativas, se refiere a que para. cada variable y parámetro, se selecciona un intervalo que representa la operación normal del sistema, donde se ven reflejados los valores de ellos. Los límites de estos intervalos determinan la continuidad del sistema en su operación, estos límites establecen tres regiones que indican el comportamiento cualitativo del sistema [Ola89]. Las regiones establecen los valores cualitativos usados en este documento, términos simbólicos que se limitan a sólo tres tipos:
Bajo (menos) [-I
Alto'(más) [+I Normal [O1
AI igual que en los sistemas de lógica difusa, es necesario especificar los límites que definen a cada región, así como tener una referencia que indique cuándo algo es mayor, menor o sin cambio con relación a un punto de operación, ya que sin una referencia estos valores cualitativos no indican nada. Así que los valores cualitativos no representan cantidades absolutas, más bien, representan la desviación de un valor numérico a partir de una referencia específica. Esto incluye que se pueden hacer más divisiones cualitativas como las usadas en lógica difusa, como: positivo alto (++),positivo medio (+-),positivo bajo (--),por ejemplo.
Por el contexto de diagnóstico utilizado aquí, sólo se utilizan los valores indicados antes (+, O , -). Una representación matemática del valor cualitativo de x, una variable cualquiera en los reales, denotado como [XI, se define de manera sencilla como la desviación de un punto de referencia XO. Este valor está dado por:
1x1 = Sgnb - xo) (3.1)
Cuando la referencia es un intervalo (que es el caso que se presenta en este trabajo), entonces el valor de x está especificado de la siguiente manera:
[XI= '-' cuando x < x i [XI= 'O' cuando xg' 5 x S w' [XI= '+' cuando XO+ i x
donde xg' es el valor inferior del intervalo y XO+ es el valor superior del intervalo.
El valor de referencia XO, es el valor esperado que caracteriza a la variable o parámetro del proceso bajo condiciones normales de operación. En este documento estas condiciones normales de operación las establecen valores positivos, así que se define:
f [XI= '-' cuando x i xg Ixl= '+' cuando x > xo xo E 31 +, por tanto,
[[XI= 'O' cuando x = xi
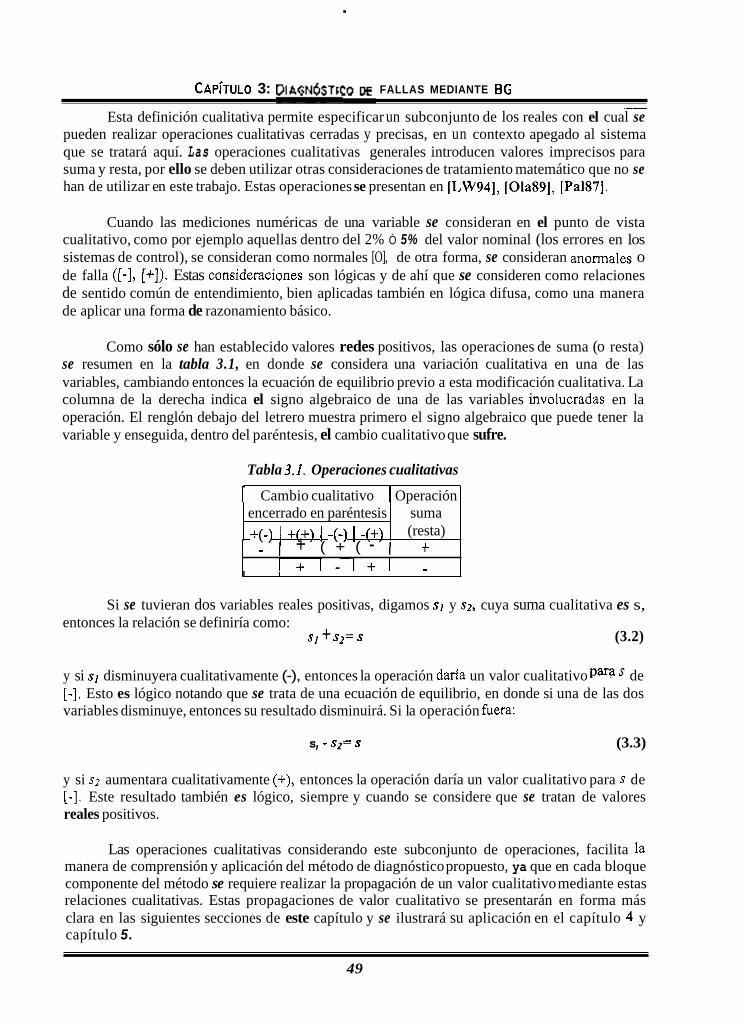
CAPíTULO 3: DIAGN~STICO DE FALLAS MEDIANTE BG
encerrado en paréntesis +(-I I +(+) I -(-I I -(+)
~
Esta definición cualitativa permite especificar un subconjunto de los reales con el cual se pueden realizar operaciones cualitativas cerradas y precisas, en un contexto apegado al sistema que se tratará aquí. Las operaciones cualitativas generales introducen valores imprecisos para suma y resta, por ello se deben utilizar otras consideraciones de tratamiento matemático que no se han de utilizar en este trabajo. Estas operaciones se presentan en [LW94], [Ola89], (Pa1871.
suma (resta)
Cuando las mediciones numéricas de una variable se consideran en el punto de vista cualitativo, como por ejemplo aquellas dentro del 2% Ó 5% del valor nominal (los errores en los sistemas de control), se consideran como normales [O], de otra forma, se consideran anormales o de falla ([-I, [+I). Estas consideraciones son lógicas y de ahí que se consideren como relaciones de sentido común de entendimiento, bien aplicadas también en lógica difusa, como una manera de aplicar una forma de razonamiento básico.
Como sólo se han establecido valores redes positivos, las operaciones de suma (o resta) se resumen en la tabla 3.1, en donde se considera una variación cualitativa en una de las variables, cambiando entonces la ecuación de equilibrio previo a esta modificación cualitativa. La columna de la derecha indica el signo algebraico de una de las variables involucradas en la operación. El renglón debajo del letrero muestra primero el signo algebraico que puede tener la variable y enseguida, dentro del paréntesis, el cambio cualitativo que sufre.
Tabla 3. I , Operaciones cualitativas
1 Cambio cualitativo I Operación I
- ( + ( + ( - ( + I + I - I + I -
I I
Si se tuvieran dos variables reales positivas, digamos SI y SI, cuya suma cualitativa es s,
s/ + s2= s (3.2)
y si SI disminuyera cualitativamente (-), entonces la operación daría un valor cualitativo para s de [-l. Esto es lógico notando que se trata de una ecuación de equilibrio, en donde si una de las dos variables disminuye, entonces su resultado disminuirá. Si la operación fuera:
entonces la relación se definiría como:
s, - s2= s (3.3)
y si s2 aumentara cualitativamente (+), entonces la operación daría un valor cualitativo para s de [-l. Este resultado también es lógico, siempre y cuando se considere que se tratan de valores reales positivos.
Las operaciones cualitativas considerando este subconjunto de operaciones, facilita la manera de comprensión y aplicación del método de diagnóstico propuesto, ya que en cada bloque componente del método se requiere realizar la propagación de un valor cualitativo mediante estas relaciones cualitativas. Estas propagaciones de valor cualitativo se presentarán en forma más clara en las siguientes secciones de este capítulo y se ilustrará su aplicación en el capítulo 4 y capítulo 5.
49
3.5 Gráfico causal
El gráfico causal es el segundo bloque que sigue en el método de diagnóstico propuesto ilustrado en lafigura 3.2. Una vez que se tiene el modelo del sistema en BG, se prosigue a ia construcción del gráfico causal. La finalidad del grá)co causal es obtener a partir de su representación causal gráfica, el árbol de fallas y el gráflco temporal.
El fundamento energético del BG utiliza la ley de conservación de la energía, de ahí que la dinámica de un sistema sea una consecuencia directa de que existe un intercambio de energía a lo largo de los componentes del sistema. La energía va intercambiando entre los dos tipos de comportamiento que puede tener: estática o en reposo y dinámica o en movimiento, o sea, la energía potencial y energía cinética que se conoce por extensión de los sistemas mecánicos. Estas energías interactúan de forma que es posible seguir sus relaciones a través de los componentes cuando se tienen establecidas las relaciones energéticas entre ellos.
A partir de las relaciones entraddsalida dadas por la causalidad asignada al modelo, es posible seguir un camino causal IBBDOO], IBlu82], [ZTDKOO], definido como la propagación de causalidad dada por la “barra de causalidad” (barra que se asocia a cada enlace energético o flecha de potencia) en un modelo en BG. El flujo (o el esfuerzo) sigue una misma trayectoria, ya sea cerrada o abierta desde un punto de entrada hasta un punto de salida. El camino causal se puede hacer más evidente mediante el gráfico causal [MB97], [MKB95]. En todos los casos se explota esa gran ventaja que sólo el BG puede dar por las relaciones que establece al momento de generar cualquier modelo.
El gráfico causal, que es parecido al grájko defrujo de señal y al cual se le puede aplicar también la regla de ganancias de Mason, como se hace en (Blu82],. [BroOl], muestra las relaciones causales entre los elementos componentes del sistema, se obtiene directamente del modelo en BG y de las ecuaciones generadas a partir de éste. El gráfico causal muestra también el camino causal entre componentes, lo que permite obtener ganancias entre elementos, siguiendo una misma ruta de causalidad, ya sea de flujo o de esfuerzo.
La obtención del gráfico causal se puede realizar siguiendo los pasos que se muestran a continuación que se sugieren en [Blu82], [BroOl], [GS96]:
1. Se consideran del BG del sistema, las ecuaciones.de. unión, tomando como nodo de referencia, el esfuerzo (si es unión tipo I ) que tiene la causalidad saliente; o el flujo que tiene la causalidad entrante a la unión, si es que se trata de una unión tipo O. Estos constituyen los bloques principales del gráfico causal.
2. Se dibujan flechas que indican las relaciones debidas a la unión, cada flecha que une a las variables indica, mediante un 1 Ó -1, si se trata de un elemento sumado o restado, según las ecuaciones de la unión. Estas son flechas de enlace. Un signo ‘=’ indicaría magnitudes iguales.
3. Se tienen, hasta ahora, los primeros nodos del gráfico causal, en términos de la variable que indica la causalidad de entrada o salida; ahora las flechas que salen de esta variable han de indicar las relaciones mostradas en las ecuaciones obtenidas del BG. Cada nodo de referencia se toma como un bloque.
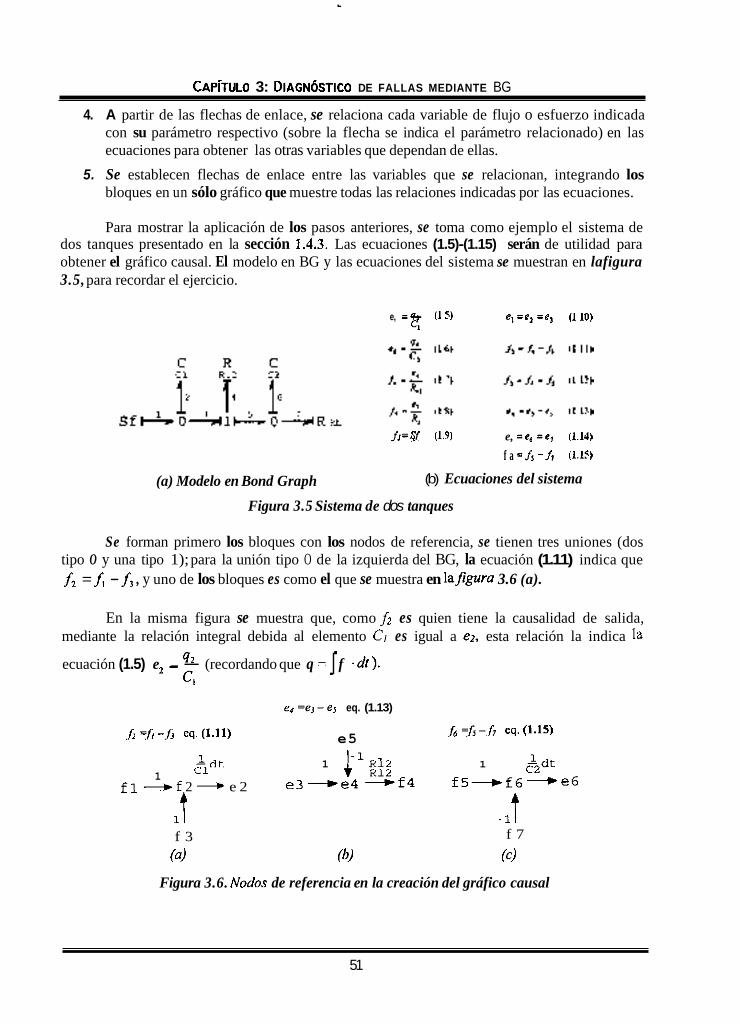
CAPITULO 3: DIAGNÓSTICO DE FALLAS MEDIANTE BG
4. A partir de las flechas de enlace, se relaciona cada variable de flujo o esfuerzo indicada con su parámetro respectivo (sobre la flecha se indica el parámetro relacionado) en las ecuaciones para obtener las otras variables que dependan de ellas.
5. Se establecen flechas de enlace entre las variables que se relacionan, integrando los bloques en un sólo gráfico que muestre todas las relaciones indicadas por las ecuaciones.
Para mostrar la aplicación de los pasos anteriores, se toma como ejemplo el sistema de dos tanques presentado en la sección 1.4.3. Las ecuaciones (1.5)-(1.15) serán de utilidad para obtener el gráfico causal. El modelo en BG y las ecuaciones del sistema se muestran en lafigura 3.5, para recordar el ejercicio.
e, =- q, (1 9 e, =e, =e, (1 10) c,
fi-v (1.9) e, =e6 =e, (1.14)
f a =f* -f, (1.19
(a) Modelo en Bond Graph (b) Ecuaciones del sistema
Figura 3.5 Sistema de dos tanques
Se forman primero los bloques con los nodos de referencia, se tienen tres uniones (dos tipo O y una tipo 1); para la unión tipo O de la izquierda del BG, la ecuación (1.11) indica que f 2 = f, - f 3 , y uno de los bloques es como el que se muestra en lajgura 3.6 (a).
En la misma figura se muestra que, como f2 es quien tiene la causalidad de salida, mediante la relación integral debida al elemento C, es igual a e2, esta relación la indica la
q 2 ecuación (1.5) e - - (recordando que q = f . d f ) . 2 - c , e, =ej-ej eq. (1.13)
.fa =fr-.fi eq. (1.15) .h =fi -.ti eq. (1.11) e5
$ldt. 1 l 1 - L ni2 1 &It
e 3 d e 4 d f 4 f S - c f 6 - t e 6 1 f i - + f 2 + e 2
1 t .1 t f 7 f 3
(0) (b) ( 4
Figura 3.6. Nodos de referencia en la creación del gráfico causal
51

DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
Para la unión tipo 1 se realiza lo mismo: la ecuación (1.13) describe que e, = e, -e,, y se indica de la forma mostrada en lafigura 3.6 (b), e4 se relaciona af4 mediante R ~ z , se&n (1.7) y se indica en el mismo bloque de la figura. Por Último, el bloque para la otra unión tipo O de la derecha del BG de lafigura 3.5 (a), se forma usando la ecuación (1.15) y su salida será una relación diferencial dada por la ecuación (1.6) para obtener el esfuerzo e6. Esto se muestra en ia figura 3.6 (e).
El gráfico causal completo se forma mediante la unión de los bloques iniciales de cada nodo, uniendo las flechas como corresponda y cubriendo con todas las ecuaciones derivadas del BG. Lafigura 3.7 lo muestra.
el
Figura 3.7. Gráfico causal del ejemplo del sistema de dos tanques
El gáfico causal muestra las relaciones entre los componentes del sistema y como se presentará más adelante, es una herramienta muy importante para el desarrollo del método de diagnóstico propuesto, debido a que a partir de este gráfico se puede obtener el árbol de fallas y el gráfico temporal.
3.6 Árboles de fallas
El tercer bloque del método de diagnóstico ilustrado en lafigura 3.2 indica la elaboración de un árbol de fallas, que permite establecer un primer conjunto de hipótesis de falla. El uso de árboles de fallas en la detección y diagnóstico de fallas ha sido reportado por otros autores, como se indica enseguida.
El uso de árboles para describir el comportamiento de un sistema ha sido empleado para describir relaciones topológicas cuando se conocen las relaciones entre componentes de manera directa y heurística [KSS94], y cuando se tienen modelos del sistema que muestran las relaciones estructurales utilizando las ecuaciones provenientes del BG, como en los artículos de Khoda et al. en [KKFI93] y [KiTA99].
Debido a que el gráfico causal muestra las relaciones energéticas entre los componentes del sistema que representa, de este gráfico causal se obtienen árboles de fallas como lo sugieren Mosterman y Biswas en [MB97] y Rosenberg y Kamopp en [RK83]. Mediante el uso del llamado aquí método I para obtención de árboles de fallas, que está basado en los sugeridos por los autores antes mencionados, requiere tener eluborudo un gráfico causal y propagar los valores cualitativos de la variable analizada.
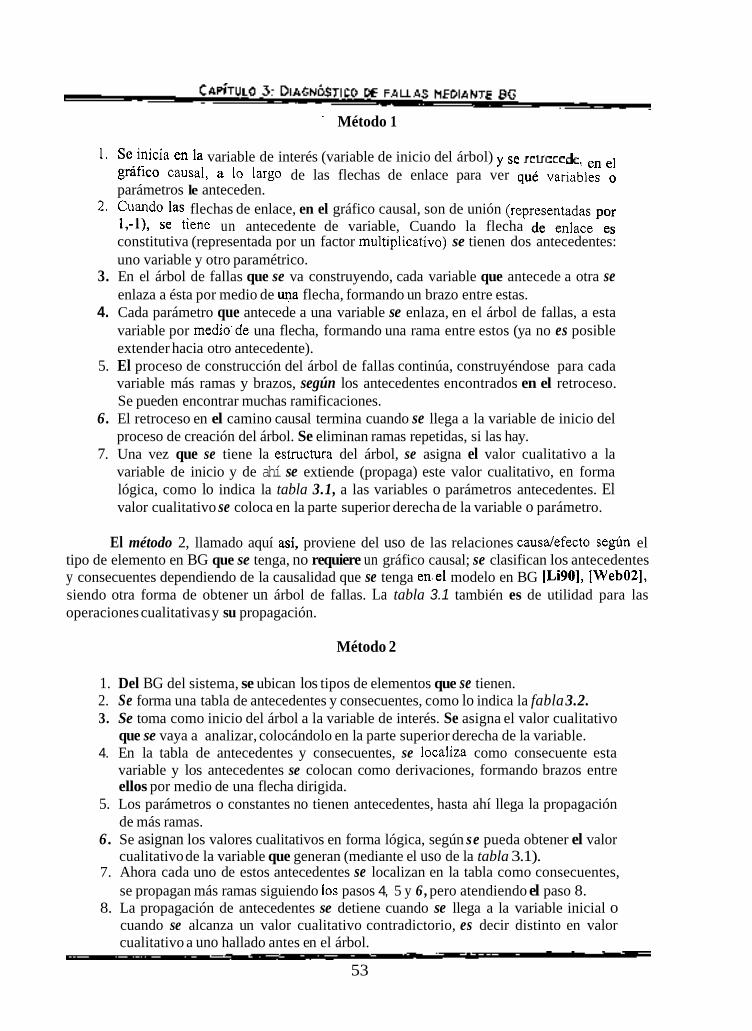
- Método 1
1. Se inicia en la variable de interés (variable de inicio del árbol) y se en el gráfico causal, a 10 largo de las flechas de enlace para ver qué variables o parámetros le anteceden.
2. Cuando las flechas de enlace, en el gráfico causal, son de unión (representadas por 1,-1), se tiene un antecedente de variable, Cuando la flecha de enlace es constitutiva (representada por un factor multiplicativo) se tienen dos antecedentes: uno variable y otro paramétrico.
3. En el árbol de fallas que se va construyendo, cada variable que antecede a otra se enlaza a ésta por medio de E a flecha, formando un brazo entre estas.
4. Cada parámetro que antecede a una variable se enlaza, en el árbol de fallas, a esta variable por medio.de una flecha, formando una rama entre estos (ya no es posible extender hacia otro antecedente).
5. El proceso de construcción del árbol de fallas continúa, construyéndose para cada variable más ramas y brazos, según los antecedentes encontrados en el retroceso. Se pueden encontrar muchas ramificaciones.
6. El retroceso en el camino causal termina cuando se llega a la variable de inicio del proceso de creación del árbol. Se eliminan ramas repetidas, si las hay.
7. Una vez que se tiene la estmctura del árbol, se asigna el valor cualitativo a la variable de inicio y de ahí se extiende (propaga) este valor cualitativo, en forma lógica, como lo indica la tabla 3.1, a las variables o parámetros antecedentes. El valor cualitativo se coloca en la parte superior derecha de la variable o parámetro.
El método 2, llamado aquí así, proviene del uso de las relaciones causdefecto segÚn el tipo de elemento en BG que se tenga, no requiere un gráfico causal; se clasifican los antecedentes y consecuentes dependiendo de la causalidad que se tenga m e 1 modelo en BG ILi901, [Web02], siendo otra forma de obtener un árbol de fallas. La tabla 3.1 también es de utilidad para las operaciones cualitativas y su propagación.
Método 2
1. Del BG del sistema, se ubican los tipos de elementos que se tienen. 2. Se forma una tabla de antecedentes y consecuentes, como lo indica la fabla 3.2. 3. Se toma como inicio del árbol a la variable de interés. Se asigna el valor cualitativo
que se vaya a analizar, colocándolo en la parte superior derecha de la variable. 4. En la tabla de antecedentes y consecuentes, se localiza como consecuente esta
variable y los antecedentes se colocan como derivaciones, formando brazos entre ellos por medio de una flecha dirigida.
5. Los parámetros o constantes no tienen antecedentes, hasta ahí llega la propagación de más ramas.
6. Se asignan los valores cualitativos en forma lógica, según se pueda obtener el valor cualitativo de la variable que generan (mediante el uso de la tabla 3.1).
7. Ahora cada uno de estos antecedentes se localizan en la tabla como consecuentes, se propagan más ramas siguiendo los pasos 4, 5 y 6 , pero atendiendo el paso 8.
8. La propagación de antecedentes se detiene cuando se llega a la variable inicial o cuando se alcanza un valor cualitativo contradictorio, es decir distinto en valor cualitativo a uno hallado antes en el árbol.
53
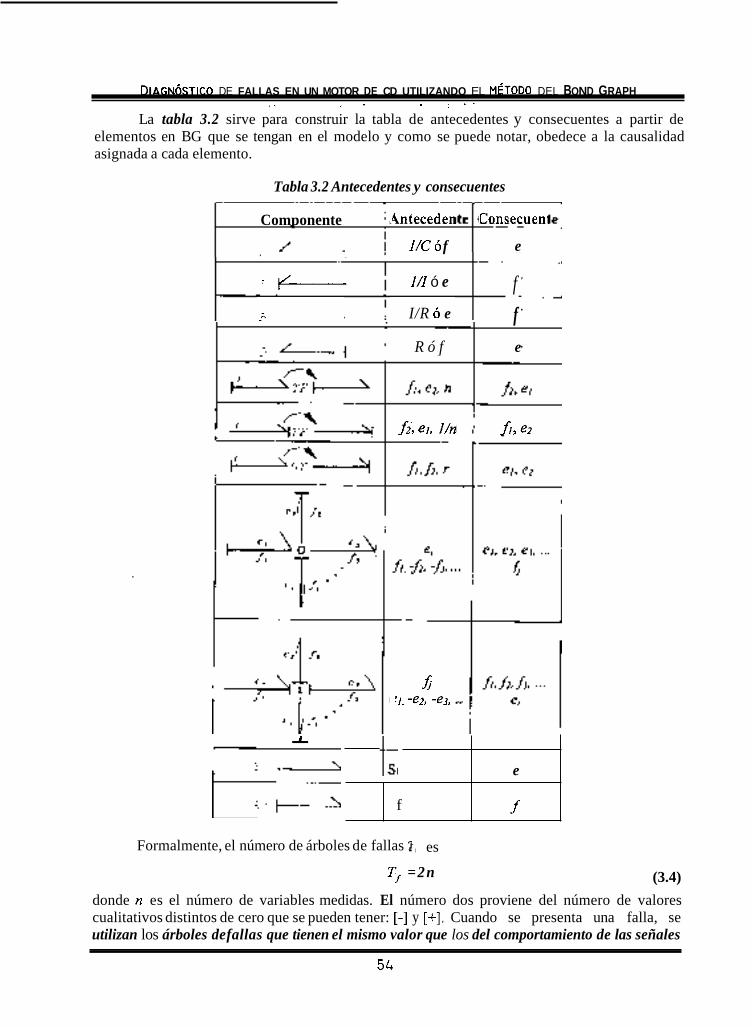
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH . ; . . . .. ,,
La tabla 3.2 sirve para construir la tabla de antecedentes y consecuentes a partir de elementos en BG que se tengan en el modelo y como se puede notar, obedece a la causalidad asignada a cada elemento.
Tabla 3.2 Antecedentes y consecuentes
Componente
-iL-- >
I
4nteceden
I/C ó f
I/I ó e
I/R Ó e
R ó f
fi, el. I/n
& ? I . -e2, -e3, ..
f
Consecueni
e
f f e
fi, e2
e
f
Formalmente, el número de árboles de fallas es
Tf =2n
donde n es el número de variables medidas. El número dos proviene del número de valores cualitativos distintos de cero que se pueden tener: [-I y [+l. Cuando se presenta una falla, se utilizan los árboles de fallas que tienen el mismo valor que los del comportamiento de las señales
5r,
(3.4)
CAPíTULO 3: DIAGNÓSTICO DE FALLAS MEDIANTE BG
medidas en forma cualitativa. Así se establece el conjunto de hipótesis de falla, observando que parámetros son iguales en valor cualitativo en cada árbol de fallas de las variables medidas u observadas.
La obtención del árbol de fallas con cualesquiera de los dos métodos no implica diferencia en cuanto a ventajas o desventajas, ambos métodos dan el mismo resultado. El árbol de fallas delimita los parámetros posibles de falla cuando la variable de inicio tiene un cambio en su comportamiento normal de operación. Con ello se genera un primer conjunto de hipótesis de falla.
El análisis que sigue a la generación de árboles de fallas para poder reducir el conjunto y definir el causante de la falla, se refiere al comportamiento de la señal en el tiempo posterior al tiempo de falla r f , y hasta antes que alcance el nuevo estado estacionario mediante un análisis transitorio, que se explicará más adelante.
3.7 Gráfico temporal
El Último bloque del esquema presentado en lafigura 3.2 indica la elaboración del gráfico temporal, que es la etapa en donde se ha de realizar el diagnóstico de la falla, definiendo qué componente es el causante de la falla una vez que se tiene el primer conjunto de hipótesis falla. Esto se realiza mediante la comparación de firmas que se obtienen del gráfico temporal, firmas que se comparan con los valores cualitativos de las señales de salida y sus derivadas del sistema revisado. Este bloque es una implementación original en el esquema presentado, así como los criterios sobre cómo aplicarlo para diagnóstico son también aportación original de este trabajo.
El análisis posterior que sigue a la generación del primer conjunto de hipótesis de falla, emplea el grúfico temporal, que permite predecir el comportamiento inmediatamente después de la falla y hasta el momento antes de llegar al nuevo estado estacionario (qCt< te) . El uso de esta herramienta, a partir también del gráfico causal, es sugerido por Mosterman et al. en [MB97] y [MKL395], basándose en las respuestas de sistemas según las constantes de tiempo asociadas y la tendencia de la señal.
Por supuesto, esto se obtiene de la teoría energética en que se basa el BG siendo una consecuencia directa de la transferencia de energía entre componentes del sistema 11(MWO], (RK831. La propagación de una señal a través del sistema se realiza a lo largo del camino causal, reflejándose en cada uno de los enlaces energéticos. Estos efectos se notan inmediatamente después de que se ha presentado la falla.
Los pasos para obtener el gráfico temporal sugeridos por Mosterman en (MB971, son 10s siguientes:
1. Se arma el gráfico temporal comenzando con la asignación del valor cualitativo del parámetro a analizar, este valor corresponde al que se obtuvo del conjunto de fallas obtenido de los árboles de fallas.
2. En el gráfico causal, se sitúa en la flecha de enlace donde se ubique el parámetro a analizar y a partir de esta, se trazan, en el gráfico temporal, flechas de unión entre cada
de flujo 0 esfuerzo que se encuentre hacia delante y se Propaga el valor cualitativo a través de dichas variables.
3. Cuando se encuentren propagaciones en más direcciones, se sigue de igual manera hacia adelante. La propagación cualitativa sólo es a través de las variables de esfuerzo y flujo, los parámetros no influyen.
4. Se sigue aplicando el paso 2 y 3 con la modificación siguiente: cuando se encuentre un elemento diferencial en al gráfico causal, indicar, en el gráfico temporal, que se ha cruzado una diferencial por medio de una flecha a la derecha de la variable que sufre este cruce, la dirección de la flecha indica el valor cualitativo de la derivada (positivo es i' , y negativo es J ).
5. Cuando se cruza otro elemento diferencial en el gráfico causal, se añade otra flecha a la variable asociada en el gráfico temporal. Se elige un orden de derivadas suficiente para no hacer complejo el gráfico ni el análisis posterior.
6. Se finaliza cuando se ha alcanzado la derivada deseada en la variable observada.
Cada cruce por la variable de interés representa un cambio cualitativo temporal, anterior al nuevo estado estacionario (posterior a la falla), que se indica escribiendo el valor cualitativo (-, O, +) en la parte superior derecha de cada variable observada, estos valores cualitativos constituyen las firmas de cada variable [MKB95], el orden es: derivada de orden O, de primer orden, de segundo, etc. Las firmas obtenidas en este gráfico temporal se aplican al momento de analizar las señales de falla de las variables observadas o medidas, antes de que éstas alcancen el nuevo valor de estado estacionario en te, es decir, después del tiempo de falla 1/. cuando se genera un estado transitorio debido al cambio repentino en el valor nominal del algún parámetro.
El uso de derivadas de mayor orden sería para realizar una predicción de la tendencia de la magnitud después de la falla en p como se sugiere en IMB971, IMKB951, en el lapso establecido hasta la parte estacionaria, además se requerirían filtros o estimadores de derivadas que harían más robusto el módulo de monitoreo, asimismo sería necesario el uso de algún método numérico de cálculo de pendiente. También se debe considerar el orden del sistema. El análisis de las señales se debe realizar inmediatamente después de que se ha detectado una falla.
La etapa de comparación de la señal de falla, con la del comportamiento predicho a través del gráfico temporal, es la que decide dónde está localizada la falla, o sea, realiza el diagnóstico de la falla, reduciendo el conjunto de fallas a un solo elemento. La comparación de las firmas se debe realizar según el comportamiento que muestren las señales de salida medidas, justo en el tiempo anterior al nuevo estado estacionario te, que se establece según los criterios basados en dicho comportamiento, así como de reglas de persistencia de una señal permanente. En la siguiente sección se presentan estos criterios.
3.7.1 Análisis transitorio
Para poder determinar dónde termina el estado transitorio posterior a la falla, es de utilidad establecer
!% = O , donde y$ es la señal medida u observada di
56
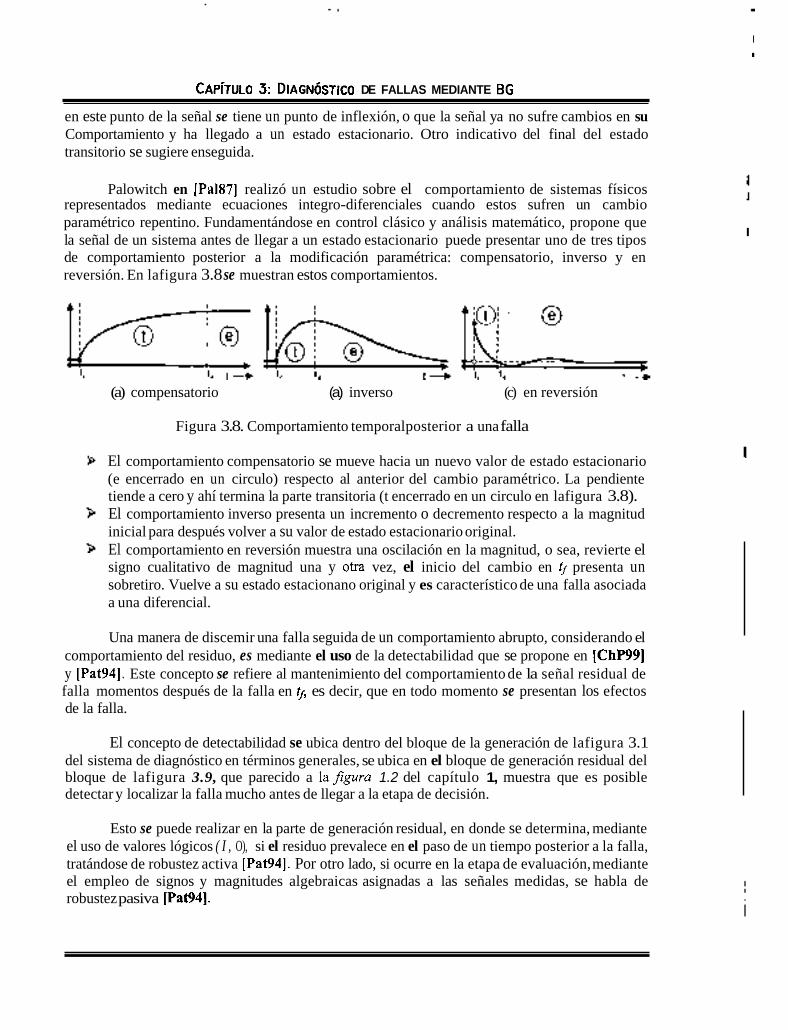
I . CAPíTULO 3: DIAGN~STICO DE FALLAS MEDIANTE BG
en este punto de la señal se tiene un punto de inflexión, o que la señal ya no sufre cambios en su Comportamiento y ha llegado a un estado estacionario. Otro indicativo del final del estado transitorio se sugiere enseguida.
Palowitch en [Pa1871 realizó un estudio sobre el comportamiento de sistemas físicos representados mediante ecuaciones integro-diferenciales cuando estos sufren un cambio paramétrico repentino. Fundamentándose en control clásico y análisis matemático, propone que la señal de un sistema antes de llegar a un estado estacionario puede presentar uno de tres tipos de comportamiento posterior a la modificación paramétrica: compensatorio, inverso y en reversión. En lafigura 3.8 se muestran estos comportamientos.
(a) compensatorio (a) inverso (c) en reversión
Figura 3.8. Comportamiento temporal posterior a una falla
El comportamiento compensatorio se mueve hacia un nuevo valor de estado estacionario (e encerrado en un circulo) respecto al anterior del cambio paramétrico. La pendiente tiende a cero y ahí termina la parte transitoria (t encerrado en un circulo en lafigura 3.8). El comportamiento inverso presenta un incremento o decremento respecto a la magnitud inicial para después volver a su valor de estado estacionario original. El comportamiento en reversión muestra una oscilación en la magnitud, o sea, revierte el signo cualitativo de magnitud una y otra vez, el inicio del cambio en I / presenta un sobretiro. Vuelve a su estado estacionano original y es característico de una falla asociada a una diferencial.
Una manera de discemir una falla seguida de un comportamiento abrupto, considerando el comportamiento del residuo, es mediante el uso de la detectabilidad que se propone en [ChP99] y [Pat94]. Este concepto se refiere al mantenimiento del comportamiento de la señal residual de falla momentos después de la falla en I/, es decir, que en todo momento se presentan los efectos de la falla.
El concepto de detectabilidad se ubica dentro del bloque de la generación de lafigura 3.1 del sistema de diagnóstico en términos generales, se ubica en el bloque de generación residual del bloque de lafigura 3.9, que parecido a lafigura 1.2 del capítulo 1, muestra que es posible detectar y localizar la falla mucho antes de llegar a la etapa de decisión.
Esto se puede realizar en la parte de generación residual, en donde se determina, mediante el uso de valores lógicos ( I , O), si el residuo prevalece en el paso de un tiempo posterior a la falla, tratándose de robustez activa [Pat94]. Por otro lado, si ocurre en la etapa de evaluación, mediante el empleo de signos y magnitudes algebraicas asignadas a las señales medidas, se habla de robustez pasiva [Pat94].
I
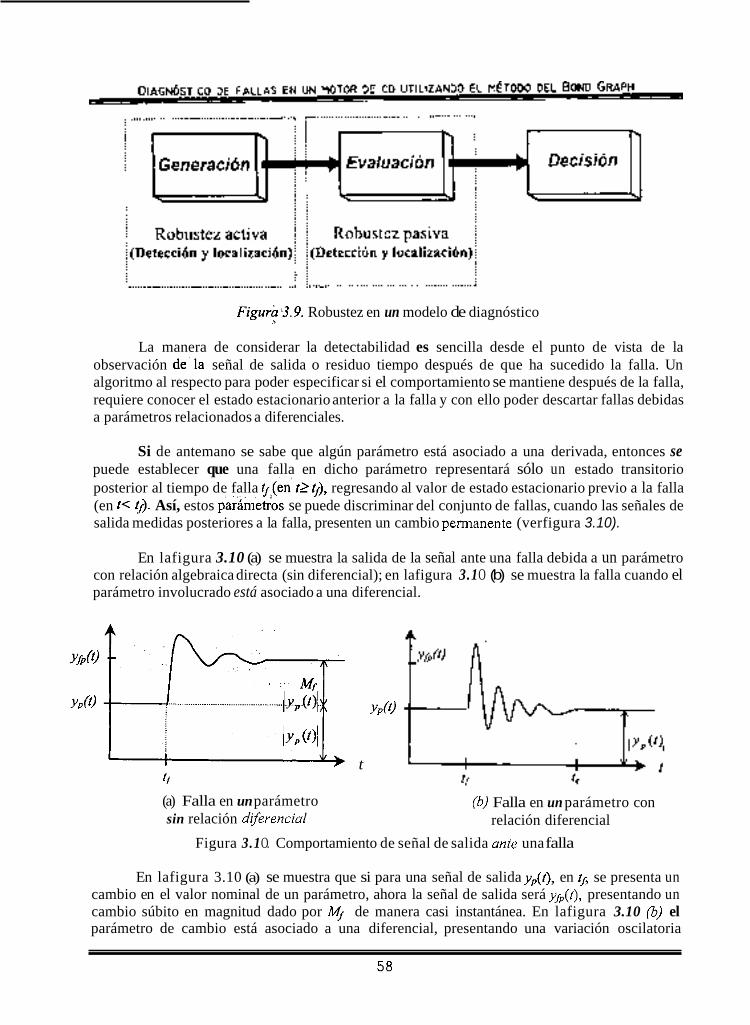
Figuram3,9. Robustez en un modelo de diagnóstico .I
La manera de considerar la detectabilidad es sencilla desde el punto de vista de la observación d&la señal de salida o residuo tiempo después de que ha sucedido la falla. Un algoritmo al respecto para poder especificar si el comportamiento se mantiene después de la falla, requiere conocer el estado estacionario anterior a la falla y con ello poder descartar fallas debidas a parámetros relacionados a diferenciales.
Si de antemano se sabe que algún parámetro está asociado a una derivada, entonces se puede establecer que una falla en dicho parámetro representará sólo un estado transitorio posterior al tiempo de falla t,(en' i>t/, regresando al valor de estado estacionario previo a la falla (en I< 9. Así, estos p&ámekos se puede discriminar del conjunto de fallas, cuando las señales de salida medidas posteriores a la falla, presenten un cambio permanente (verfigura 3.10).
En lafigura 3.10 (a) se muestra la salida de la señal ante una falla debida a un parámetro con relación algebraica directa (sin diferencial); en lafigura 3.1 O (b) se muestra la falla cuando el parámetro involucrado está asociado a una diferencial.
..., ..~ ......................................................... ~ Ydt) ybfobP-;i lb, (1))
tí
(a) Falla en un parámetro sin relación dferencial
YP(0
t
(b) Falla en un parámetro con relación diferencial
Figura 3.1 O. Comportamiento de señal de salida anie una falla
En lafigura 3.10 (a) se muestra que si para una señal de salida yp(t), en r, se presenta un cambio en el valor nominal de un parámetro, ahora la señal de salida será y/p(t), presentando un cambio súbito en magnitud dado por MI de manera casi instantánea. En lafigura 3.10 @) el parámetro de cambio está asociado a una diferencial, presentando una variación oscilatoria
5a
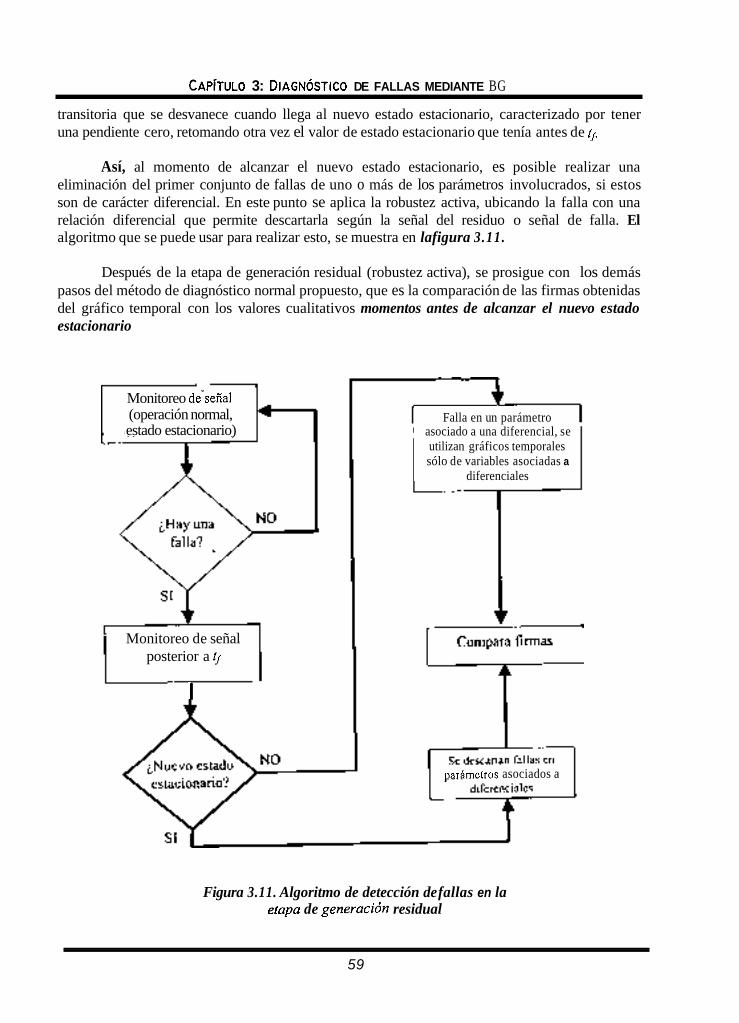
CAPíTULO 3: DIAGN~STICO DE FALLAS MEDIANTE BG
transitoria que se desvanece cuando llega al nuevo estado estacionario, caracterizado por tener una pendiente cero, retomando otra vez el valor de estado estacionario que tenía antes de r,
Así, al momento de alcanzar el nuevo estado estacionario, es posible realizar una eliminación del primer conjunto de fallas de uno o más de los parámetros involucrados, si estos son de carácter diferencial. En este punto se aplica la robustez activa, ubicando la falla con una relación diferencial que permite descartarla según la señal del residuo o señal de falla. El algoritmo que se puede usar para realizar esto, se muestra en lafigura 3.11.
Después de la etapa de generación residual (robustez activa), se prosigue con los demás pasos del método de diagnóstico normal propuesto, que es la comparación de las firmas obtenidas del gráfico temporal con los valores cualitativos momentos antes de alcanzar el nuevo estado estacionario
Monitoreo deseñal (operación normal, estado estacionario)
Monitoreo de señal posterior a tj
I
Falla en un parámetro asociado a una diferencial, se utilizan gráficos temporales sólo de variables asociadas a
diferenciales
parhc t ros asociados a
Figura 3.11. Algoritmo de detección de fallas en la eíapa de generacidn residual
59
DIAGN~STICO DE FALLAS EN UN MOTOR DE CO UTILIZANDO EL MÉTODO DEL BOND GRAPH
Con estas aclaraciones en el análisis residual posterior a la falla en t/. se establecen reglus sobre el uso de los gráficos iemporules una vez que se ha determinado la detectabilidad de las señales de salida medidas y el nuevo estado estacionario:
Se detiene cuando se llega a un valor estacionario definido por los gráficos de la jguru 3.8 e)-@), o en cuanto se alcanza el nuevo estado estacionano yigura 3.8(a)). En el gráfico temporal se establece la tendencia de la señal en magnitud y SU
comportamiento transitorio inmediatamente después de que ha sucedido la falla (en f,). Una señal que describe un cambio lento en la señal indica que en el momento de la falla (en f,) no hubo un cambio súbito en la señal y tiene una pendiente suave (de magnitud pequeña) que no se mueve tan rápido conforme pasa el tiempo, esto es indicado en el grafico temporal con un cero (O). La comparación de las firmas con las señales de salida (magnitud de señal normal y denvada de ésta) de manera cualitativa, se realiza en un tiempo antes de haber definido el nuevo estado estacionario (antes de te).
En el algoritmo mostrado en lafigura 3.11, la manera de determinar el nuevo estado estacionario está determinada por la derivada o pendiente de la señal de salida, o por la variación en el valor promediado entre muestreos o intervalos, en ambos casos no vanan estos valores de uno establecido previamente (como el no sobrepasar el I 2 ó 15% del valor promediado). Los tipos de comportamiento sirven para aplicar la detectabilidad y después, poder usar las firmas obtenidas del gráfico temporal para cada parámeho involucrado o que pertenece al conjunto de hipótesis de falla, para determinar el causante de la falla.
3.8 Condiciones de simulación
La etapa de monitoreo de las señales de salida, es fundamental para poder implementar adecuadamente el método de diagnóstico propuesto. Se deben considerar los tiempos de muesheo, así como la implementación de los filtros o método numérico que permita la obtención de las denvadas necesarias para la comparación con las firmas obtenidas del gráfico temporal. Estas consideraciones están directamente relacionadas a la constante de tiempo del sistema completo.
Respecto al marco de referencia cualitativo, se deben de establecer los límites de cada región cualitativa dependiendo de la señal de estado estacionario esperada o común de las salidas. Enseguida se indican las consideraciones hechas para este trabajo y el por qué de ellas.
La elección del tiempo de falla es totalmente arbitraria, como única restricción para su elección, es que sea después de que se ha alcanzado el estado estacionario una vez que el sistema ha entrado en operación, con condiciones iniciales iguales a cero.
Para la selección del tiempo de muestre0 siempre se recomienda que sea una fracción de la constante de tiempo más rápida que contenga el sistema completo. Se establece heunsticamente el uso de al menos 113 de la constante de tiempo más rápida. Esto, por supuesto, está de acuerdo al teorema de Shannon.
60
CAPíTULO 3: DIAGNÓSTICO DE FALLAS MEDIANTE BG
Para establecer que ha habido una falla, se utiliza la regla de control que establece como normal una señal que no varíe en un 572% del valor promedio de la señal medida. Aunque la consideración del 10% de falla en los parámetros del motor de cd lleva a establecer como umbral de falla un +0.2% del valor promedio.
La obtención de la derivada se realiza mediante un filtro pasa bajas de variables de estado desarrollado y propuesto en [YouSl], [HP94], [HI96], usándose para la elección de la frecuencia de corte, un valor mayor al valor de la inversa de la constante de tiempo más rápida del sistema, como podría ser, 4/3 ó 3/2 de este valor. Este filtro, usado en los ejemplos siguientes, se muestra en su elaboración, en el Apéndice D.
3.9 Conclusión
Se ha presentado un método de diagnóstico que integra elementos del BG desarrollados y aplicados (gráfico causal, árbol de fallas), y sugeridos (gráfico temporal) por otros autores, pero ordenados de una manera tal vigura 3.2) que permitan proponer un método de diagnóstico con la finalidad de presentarlo como una alternativa general de aplicación a cualquier sistema Esico. La aportación de este trabajo radica en esta disposición y en los criterios reunidos y presentados para aplicar el bloque que comprende el gráfico temporal.
El primer bloque se refiere a obtener el modelo del sistema en BG, el segundo bloque indica que se debe obtener un gráfico causal, con el que se puede obtener el tercer bloque, que indica la construcción de un árbol de fallas que permite definir un conjunto de hipótesis de falla. El último bloque indica la elaboración de un gráfico temporal que determinará el causante de la falla en el sistema descrito.
El algoritmo presentado en la figura 3. I 1 tiene la función de eliminar del conjunto de fallas parámetros relacionados a comportamientos diferenciales, que darían un comportamiento transitorio después de ocurrir la falla, esto pertenece a la robustez activa en la parte de la generación residual de un sistema de diagnóstico general.
La aplicación de manera ordenada y secuencial como se muestra en lafigura 3.2 de este método propuesto, supone una manera fácil de aplicar el método de diagnóstico, como se verá ai aplicarlo al caso de estudio de este trabajo de tesis.
En el siguiente capítulo se aplican cada uno de los bloques en el caso de estudio de esta tesis, el motor de cd. Como hasta ahora, se sigue presentando cada elemento del método de diagnóstico de manera secuencial para preparar al final, la aplicación a todo el conjunto convertidor-motor de cd.
61
CupítUZo 4 Diagnóstico en el motor de cd I . ~
4.1 Introducción
Como se explicó en el capítulo 1, los motores de cd permiten ser utilizados como ejemplo de aplicación en metodologías de prueba por las características apropiadas que poseen para ello. En este ,capítulo se aplican cada uno de los bloques del método de diagnóstico propuesto descritos en el capítulo anterior y mostrados en lafiguru 3.2, aplicándolo al sistema del motor de cd. La utilización del algoritmo de la figura 3. I I es importante para la etapa de diagnóstico al momento de definir el causante de la falla.
De la sección 4.2 a la sección 4.4 se presenta la aplicación de'cada bloque del método de diagnóstico propuesto al modelo en BG del motor de cd. En la' sección 4.3.1 se hace una observación sobre el uso de una K única considerada en el modelo del motor de cd.
En sección 4.5 se presenta un ejemplo de diagnóstico de Callas ante una falla en un parámetro eléctrico del sistema motor de cd. Las otras fallas y sus gráficos de salida y análisis se presentan en el ap6ndice.A. En la sección 4.6 se presenta un resumen sobre todas las fallas simuladas en el motor de cd. Se termina el capitulo con la sección 4.7 en donde se da una conclusión sobre el desarrollo del ejemplo,.
4.2 Obtención del gráfico causal
Antes de iniciar con el análisis, se debe recordar que las variables que se miden del sistema motor de cd son la comente de armadura i, y la velocidad del rotor &, variables que están ligadas en forma directamente proporcional a las variables de esfuerzo e3 y ea, respectivamente. Esto se nota de las ecuaciones derivadas en la sección 2.3.
La obtención del gráfico causal se realiza empleando los pasos indicados en la sección 3.5. Para el BG de la figura 2.12 se tienen sólo uniones tipo 1, el nodo de referencia es el esfuerzo e3 para la unión de la izquierda, mientras que para la unión derecha, el nodo de referencia es el esfuerzo es. Según el paso 1, cada nodo de referencia constituye un bloque, con los cuales se construirá todo el gráfico causal.
Aplicando el paso 2, cada flecha de enlace indica la relación del nodo de referencia con las otras variables de esfuerzo que se conectan, esto se obtiene de las ecuaciones de nodo. Enseguida se aplican los pasos 3 y 4. Para e3, la ecuación (2.20) indica sus relaciones con los otros esfuerzos y su representación se muestra en la figura 4. I (a). Pero e3 se relaciona a otra variable, en este caso con un flujo de manera diferencial; la ecuación (2.25) indica que:
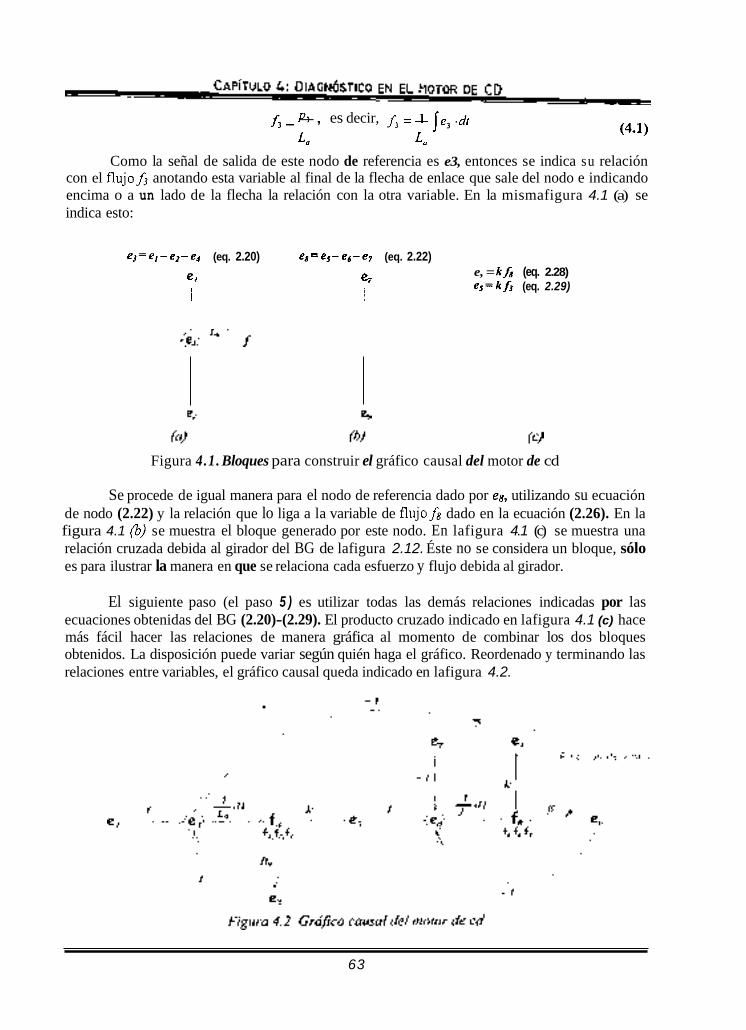
f, - PI , es decir, fl = - 1 I., . d, L, L"
(4.1)
Como la señal de salida de este nodo de referencia es e3, entonces se indica su relación con el flujof, anotando esta variable al final de la flecha de enlace que sale del nodo e indicando encima o a un lado de la flecha la relación con la otra variable. En la mismafigura 4.1 (a) se indica esto:
e*= e,- e*- ed (eq. 2.20) e8=e,-e6-e, (eq. 2.22) e, e, e, = k / l (eq. 2.28)
el= kh (eq. 2.29) i 1
Figura 4.1. Bloques para construir el gráfico causal del motor de cd
Se procede de igual manera para el nodo de referencia dado por ea, utilizando su ecuación de nodo (2.22) y la relación que lo liga a la variable de flujofs dado en la ecuación (2.26). En la figura 4.1 (b) se muestra el bloque generado por este nodo. En lafigura 4.1 (c) se muestra una relación cruzada debida al girador del BG de lafigura 2.12. Éste no se considera un bloque, sólo es para ilustrar la manera en que se relaciona cada esfuerzo y flujo debida al girador.
El siguiente paso (el paso 5 ) es utilizar todas las demás relaciones indicadas por las ecuaciones obtenidas del BG (2.20)-(2.29). El producto cruzado indicado en lafigura 4.1 (c) hace más fácil hacer las relaciones de manera gráfica al momento de combinar los dos bloques obtenidos. La disposición puede variar según quién haga el gráfico. Reordenado y terminando las relaciones entre variables, el gráfico causal queda indicado en lafigura 4.2.
63
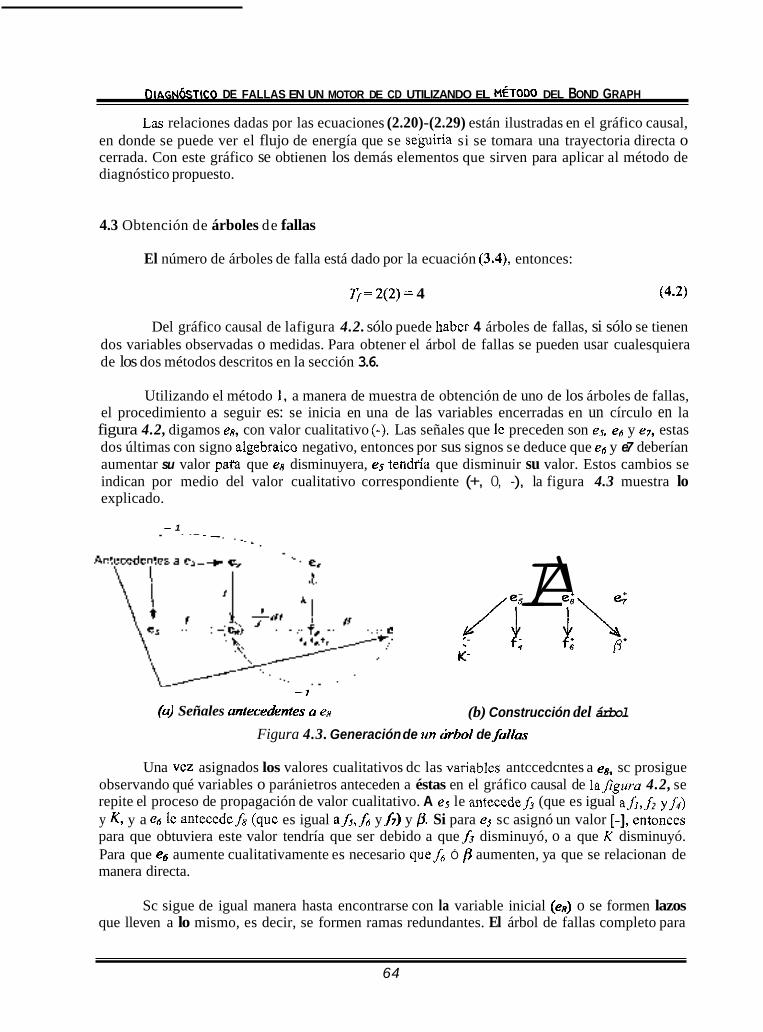
OIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
L- relaciones dadas por las ecuaciones (2.20)-(2.29) están ilustradas en el gráfico causal, en donde se puede ver el flujo de energía que se seguina si se tomara una trayectoria directa o cerrada. Con este gráfico se obtienen los demás elementos que sirven para aplicar al método de diagnóstico propuesto.
4.3 Obtención de árboles de fallas
El número de árboles de falla está dado por la ecuación (3.4), entonces:
Tr= 2(2) = 4 (4.2)
Del gráfico causal de lafigura 4.2. sólo puede haber 4 árboles de fallas, si sólo se tienen dos variables observadas o medidas. Para obtener el árbol de fallas se pueden usar cualesquiera de los dos métodos descritos en la sección 3.6.
Utilizando el método 1, a manera de muestra de obtención de uno de los árboles de fallas, el procedimiento a seguir es: se inicia en una de las variables encerradas en un círculo en la figura 4.2, digamos ea, con valor cualitativo (-). Las señales que le preceden son es, e6 y e,, estas dos últimas con signo algebraic0 negativo, entonces por sus signos se deduce que e6 y e7 deberían aumentar su valor pafa que ea disminuyera, e5 tendria que disminuir su valor. Estos cambios se indican por medio del valor cualitativo correspondiente (+, O, -), la figura 4.3 muestra lo explicado.
- 1
/l LA\ gy K-
- 1
(u) Señales aníecedentes u ex (b) Construcción del árbol Figura 4.3. Generación de un hrhol de fullas
Una vez asignados los valores cualitativos dc las variablcs antccedcntes a ea, sc prosigue observando qué variables o paránietros anteceden a éstas en el gráfico causal de IaJgura 4.2, se repite el proceso de propagación de valor cualitativo. A es le antecedejj (que es igual afi,fi y h ) y K, y a e6 IC anteccdefx (quc es igual aJ;,h y f7) y p. Si para es sc asignó un valor [-I, entonccs para que obtuviera este valor tendría que ser debido a que .I; disminuyó, o a que K disminuyó. Para que e6 aumente cualitativamente es necesario q u e h Ó f l aumenten, ya que se relacionan de manera directa.
Sc sigue de igual manera hasta encontrarse con la variable inicial (ea) o se formen lazos que lleven a lo mismo, es decir, se formen ramas redundantes. El árbol de fallas completo para
64
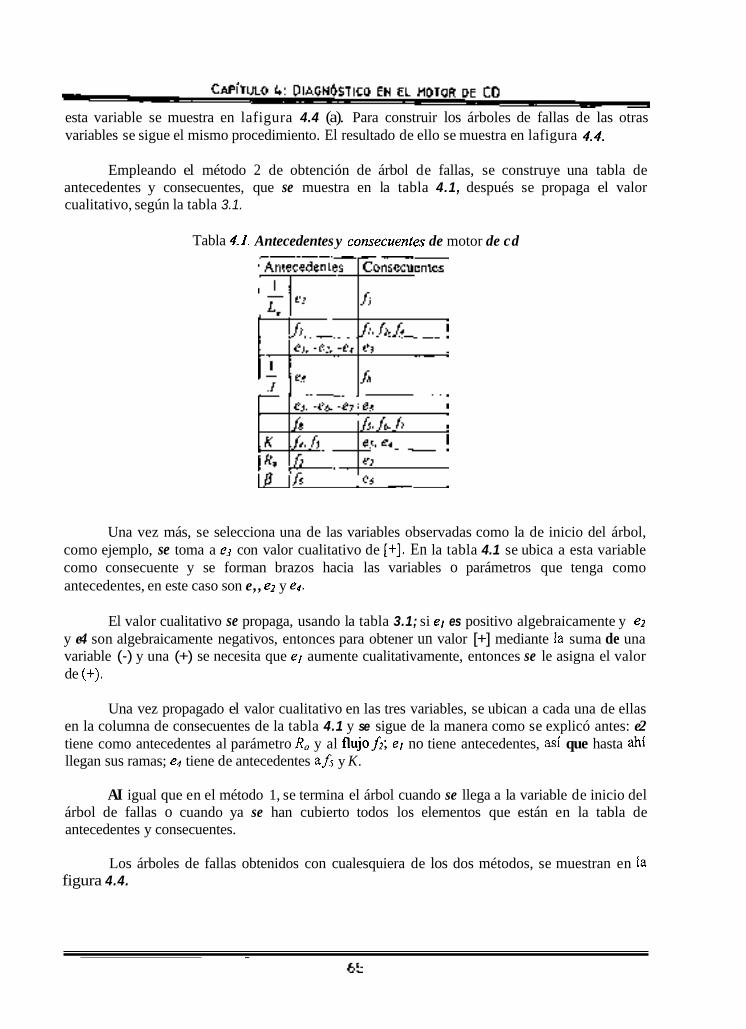
esta variable se muestra en lafigura 4.4 (a). Para construir los árboles de fallas de las otras variables se sigue el mismo procedimiento. El resultado de ello se muestra en lafigura 4.4.
Empleando el método 2 de obtención de árbol de fallas, se construye una tabla de antecedentes y consecuentes, que se muestra en la tabla 4.1, después se propaga el valor cualitativo, según la tabla 3.1.
Tabla 4.1. Antecedentes y consecuenfes de motor de cd
Una vez más, se selecciona una de las variables observadas como la de inicio del árbol, como ejemplo, se toma a el con valor cualitativo de [+l. En la tabla 4.1 se ubica a esta variable como consecuente y se forman brazos hacia las variables o parámetros que tenga como antecedentes, en este caso son e,, e2 y e+
El valor cualitativo se propaga, usando la tabla 3.1; si e / es positivo algebraicamente y e2 y e4 son algebraicamente negativos, entonces para obtener un valor [+] mediante la suma de una variable (-) y una (+) se necesita que e , aumente cualitativamente, entonces se le asigna el valor de (+).
Una vez propagado el valor cualitativo en las tres variables, se ubican a cada una de ellas en la columna de consecuentes de la tabla 4.1 y se sigue de la manera como se explicó antes: e2 tiene como antecedentes al parámetro R, y al flujoh; el no tiene antecedentes, así que hasta ahí llegan sus ramas; e4 tiene de antecedentes afs y K.
AI igual que en el método 1, se termina el árbol cuando se llega a la variable de inicio del árbol de fallas o cuando ya se han cubierto todos los elementos que están en la tabla de antecedentes y consecuentes.
Los árboles de fallas obtenidos con cualesquiera de los dos métodos, se muestran en ia figura 4.4.

DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH "^
Figura 4.4. Arboles de fallas para las variables e3 y e8
En este punto de desarrollo se debe hacer una observación respecto a los árboles de fallas para es. Se observa que hay dos ramas hacia el parámetro K y que en cada rama se tiene un valor cualitativo distinto, esto trae como consecuencia que durante la comparación de valores cualitativos en la generación del conjunto de hipótesis de falla, se presenten ambigüedades. Enseguida se da una explicación de esto y cómo proceder ante ello.
CAPíTULO 4: DIAGN~STICO EN EL MOTOR DE CD
4.3.1 Discernimiento de una K Única
Variaciónen io Vanación en
Para el caso de estudio del sistema motor de cd, se ha definido una K única que involucra a la Ki relacionada a la parte eléctrica y a la K, relacionada a la parte mecánica. Para fines de diagnóstico seria necesario diferenciar estas K's y tomarlas como distintas, lo que al modelo en BG modificaría de manera que, en vez de utilizar un girador, se ut i l izdm un par de transformadores. Esto implicaría modificar también las ecuaciones obtenidas hasta el momento y se recomendaría para considerar una operación no lineal del motor de cd. Por otro lado, es posible realizar el siguiente análisis que no involucra ningún cambio al modelo en BG y que se apega a la operación en la región lineal del motor de cd.
De los árboles de lafigura 4.4 (a), (c) se nota el caso especial que involucra al parámetro K. En el árbol de la variable ea, relacionada con la velocidad, esta es afectada por dos ramas: una que va directa al parámetro K y otra que cruza por la variable e3, lo que describe que cuando K incrementa, la comente disminuye, pero también la velocidad aumenta.
Es necesario evaluar cuál de estos dos efectos afecta más a la velocidad: si el solo aumento de K o la disminución de io debida al aumento de K. Este comportamiento es debido al girador por ser un elemento que introduce un producto cmzado de flujos y esfuerzos.
La afectación de K en cualesquiera de los subsistemas sobre la comente io, es directamente proporcional en una relación porcentual casi igual al incremento (o decremento) de K. En la K asociada a la parte eléctrica la afectación de esta es directamente proporcional a la velocidad en una relación porcentual casi igual a la variación en K; mientras que un cambio en K asociado a la parte mecánica es inversamente proporcional a la velocidad en una relación 35:l aproximadamente.
La tabla 4.2 muestra algunas relaciones obtenidas en simulación al respecto, estas simulaciones se obtienen del modelo presentado en lafigura 2.14 realizadas en Sirnulink6
Tabla 4.2. Comparacidn de valores de salida según varia K I Variación porcentual en K I Vaiación porcentual en K I (parte eiéctnca) (parte mecánica)
10.83% 24.28% 41.15% 10.83% 24.28% 41.15% -10% -20% -30% -10% -20% -30%
10.83% 24.28% 41.45% -0.579% -0.25% -0.99%
Valor nominal i,: 1.5528 A Valor nominal &: 31 1.4592 rads
Con estos resultados se puede descartar el efecto de K relacionado a la parte mecánica del sistema, por tanto, observando el árbol de fallas para e8 de lafigura 4.5, la rama directa hacia K se debe descartar como falla (zona punteada), considerando entonces la rama que se extiende hasta la K que pasa por e3 (zona encerrada con línea gmesa). El efecto de la K de la parte mecánica es mucho menor que el efecto de la K de la parte eléctrica.
67
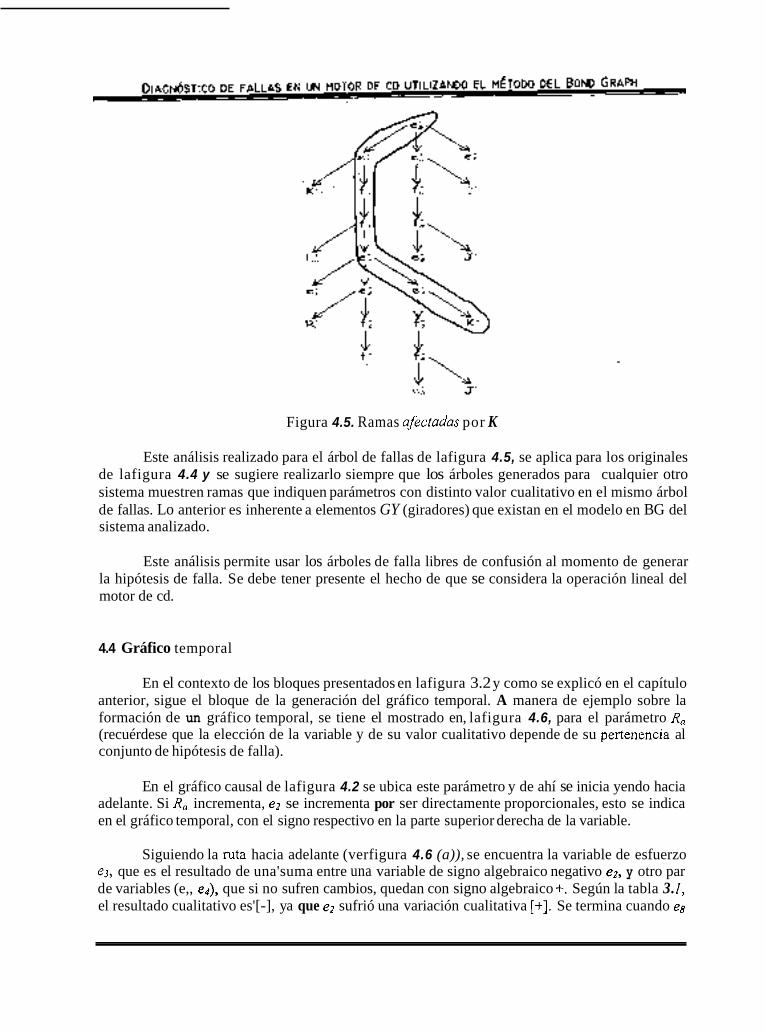
Figura 4.5. Ramas afeciadas por K
Este análisis realizado para el árbol de fallas de lafigura 4.5, se aplica para los originales de lafigura 4.4 y se sugiere realizarlo siempre que los árboles generados para cualquier otro sistema muestren ramas que indiquen parámetros con distinto valor cualitativo en el mismo árbol de fallas. Lo anterior es inherente a elementos GY (giradores) que existan en el modelo en BG del sistema analizado.
Este análisis permite usar los árboles de falla libres de confusión al momento de generar la hipótesis de falla. Se debe tener presente el hecho de que se considera la operación lineal del motor de cd.
4.4 Gráfico temporal
En el contexto de los bloques presentados en lafigura 3.2 y como se explicó en el capítulo anterior, sigue el bloque de la generación del gráfico temporal. A manera de ejemplo sobre la formación de un gráfico temporal, se tiene el mostrado en, lafigura 4.6, para el parámetro R, (recuérdese que la elección de la variable y de su valor cualitativo depende de su pertenencia al conjunto de hipótesis de falla).
En el gráfico causal de lafigura 4.2 se ubica este parámetro y de ahí se inicia yendo hacia adelante. Si R, incrementa, e2 se incrementa por ser directamente proporcionales, esto se indica en el gráfico temporal, con el signo respectivo en la parte superior derecha de la variable.
Siguiendo la ruta hacia adelante (verfigura 4.6 (a)), se encuentra la variable de esfuerzo e3, que es el resultado de una'suma entre una variable de signo algebraico negativo et, y otro par de variables (e,, e{), que si no sufren cambios, quedan con signo algebraico +. Según la tabla 3. I , el resultado cualitativo es'[-], ya que el sufrió una variación cualitativa [+l. Se termina cuando es
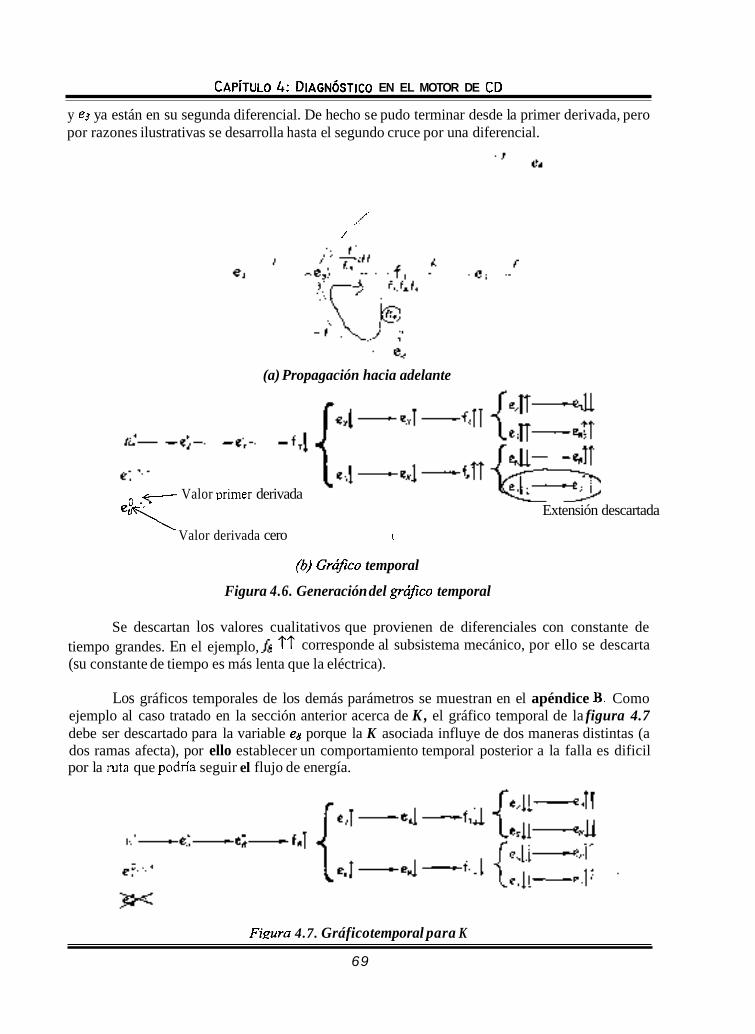
CAPíTULO 4: DIAGN~STICO EN EL MOTOR DE CD
y ej ya están en su segunda diferencial. De hecho se pudo terminar desde la primer derivada, pero por razones ilustrativas se desarrolla hasta el segundo cruce por una diferencial.
,/'.
i
(a) Propagación hacia adelante
o .- Valor urimer derivada
e\ Extensión descartada
Valor derivada cero 1
(b) Grbfico temporal
Figura 4.6. Generación del grájco temporal
Se descartan los valores cualitativos que provienen de diferenciales con constante de ?? corresponde al subsistema mecánico, por ello se descarta tiempo grandes. En el ejemplo,
(su constante de tiempo es más lenta que la eléctrica).
Los gráficos temporales de los demás parámetros se muestran en el apéndice B. Como ejemplo al caso tratado en la sección anterior acerca de K , el gráfico temporal de la figura 4.7 debe ser descartado para la variable ea porque la K asociada influye de dos maneras distintas (a dos ramas afecta), por ello establecer un comportamiento temporal posterior a la falla es dificil por la mta que podria seguir el flujo de energía.
Fimra 4.7. Gráfico temporal para K
69
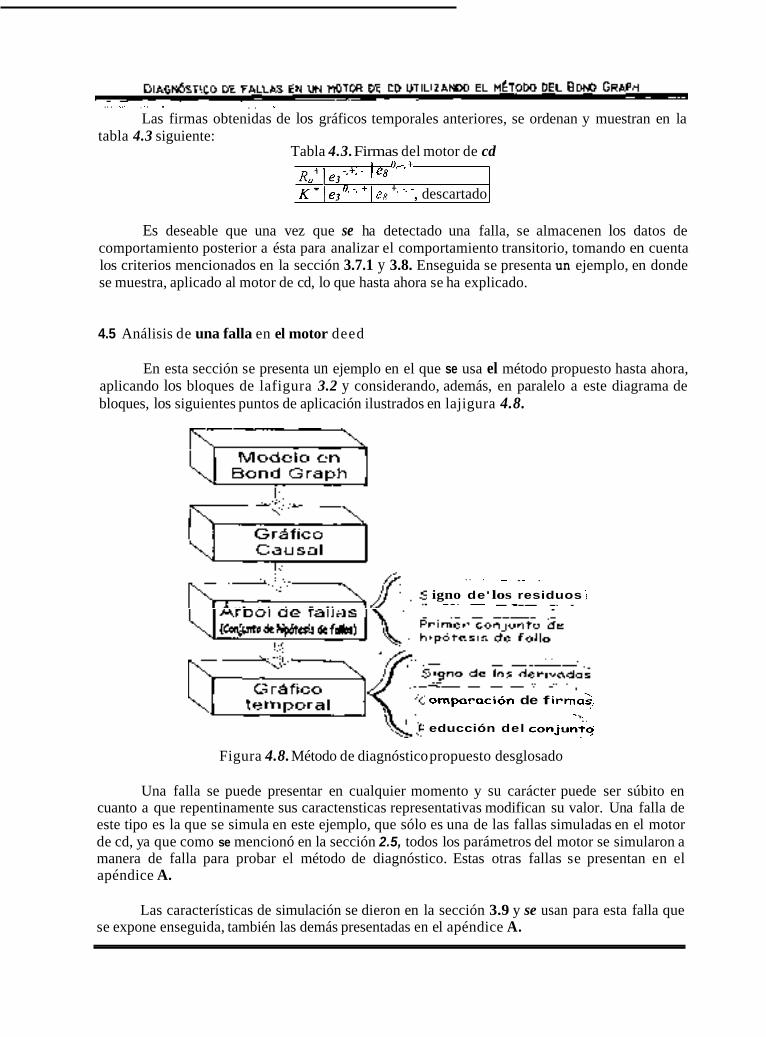
. . I .. . .,~ , .. . Las firmas obtenidas de los gráficos temporales anteriores, se ordenan y muestran en la
tabla 4.3 siguiente: Tabla 4.3. Firmas del motor de cd
I e8 ''. -,' R,+ I e3 ;+
K 1 e3 ", -' + I e8 ', -' -, descartado
Es deseable que una vez que se ha detectado una falla, se almacenen los datos de comportamiento posterior a ésta para analizar el comportamiento transitorio, tomando en cuenta los criterios mencionados en la sección 3.7.1 y 3.8. Enseguida se presenta un ejemplo, en donde se muestra, aplicado al motor de cd, lo que hasta ahora se ha explicado.
4.5 Análisis de una falla en el motor deed
En esta sección se presenta un ejemplo en el que se usa el método propuesto hasta ahora, aplicando los bloques de lafigura 3.2 y considerando, además, en paralelo a este diagrama de bloques, los siguientes puntos de aplicación ilustrados en lajigura 4.8.
~ . ~ . . . .
igno de' los residuos i
. .
omparación ~ de f irma2;
educción del ConjunT? -.
Figura 4.8. Método de diagnóstico propuesto desglosado
Una falla se puede presentar en cualquier momento y su carácter puede ser súbito en cuanto a que repentinamente sus caractensticas representativas modifican su valor. Una falla de este tipo es la que se simula en este ejemplo, que sólo es una de las fallas simuladas en el motor de cd, ya que como se mencionó en la sección 2.5, todos los parámetros del motor se simularon a manera de falla para probar el método de diagnóstico. Estas otras fallas se presentan en el apéndice A.
Las características de simulación se dieron en la sección 3.9 y se usan para esta falla que se expone enseguida, también las demás presentadas en el apéndice A.
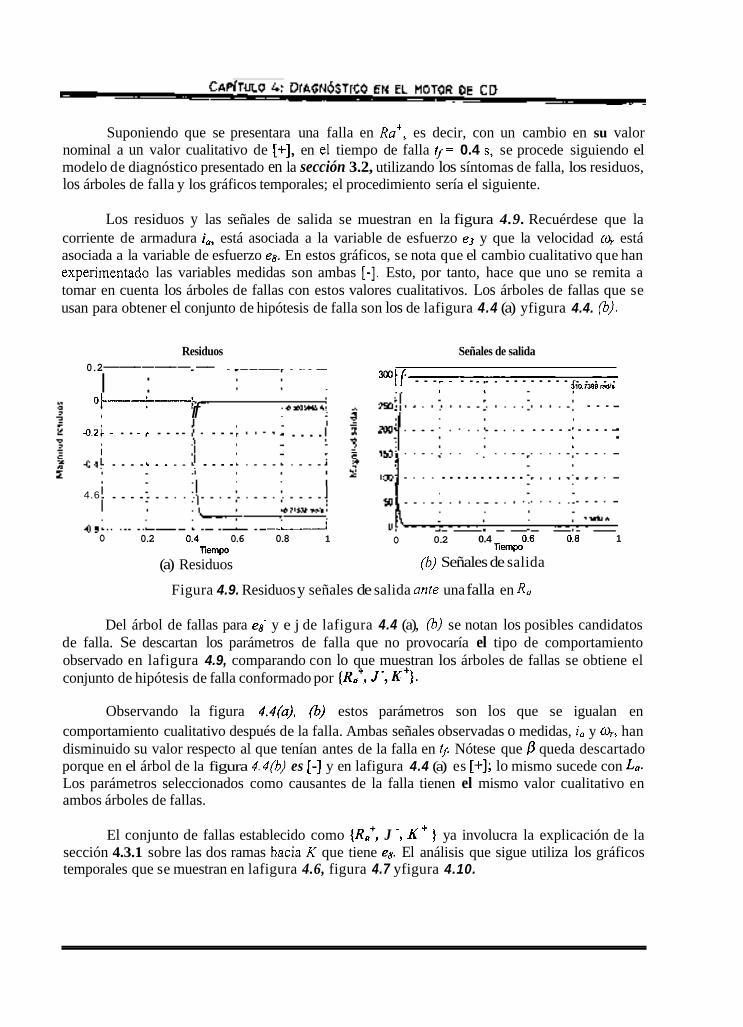
Suponiendo que se presentara una falla en Rat, es decir, con un cambio en su valor nominal a un valor cualitativo de [+I, en el tiempo de falla I / = 0.4 s, se procede siguiendo el modelo de diagnóstico presentado en la sección 3.2, utilizando los síntomas de falla, los residuos, los árboles de falla y los gráficos temporales; el procedimiento sería el siguiente.
Los residuos y las señales de salida se muestran en la figura 4.9. Recuérdese que la corriente de armadura io, está asociada a la variable de esfuerzo e3 y que la velocidad uh está asociada a la variable de esfuerzo ea. En estos gráficos, se nota que el cambio cualitativo que han experimentado las variables medidas son ambas [-l. Esto, por tanto, hace que uno se remita a tomar en cuenta los árboles de fallas con estos valores cualitativos. Los árboles de fallas que se usan para obtener el conjunto de hipótesis de falla son los de lafigura 4.4 (a) yfigura 4.4. (b).
Residuos Señales de salida m/. i ... ~. .. . ~ . .........
!io.in;l&,
0.2 -------.-- I :
... ..... ....
O + - L - - L
if 4.2. . .. ., ... ... . . . .
.... .... ...........
....
0.2 0.4 0.6 0.8 1 0.8 1 0.4 0.6 0.2 Tiempo
O
r . .
4.6
-_,-A
niernpo (a) Residuos (6) Señales de salida
O
Figura 4.9. Residuos y señales de salida ante una falla en R,
Del árbol de fallas para es' y e j de lafigura 4.4 (a), (b) se notan los posibles candidatos de falla. Se descartan los parámetros de falla que no provocaría el tipo de comportamiento observado en lafigura 4.9, comparando con lo que muestran los árboles de fallas se obtiene el conjunto de hipótesis de falla conformado por (R.f , J- , K'}.
Observando la figura 4,4(a), (3) estos parámetros son los que se igualan en comportamiento cualitativo después de la falla. Ambas señales observadas o medidas, i, y uh, han disminuido su valor respecto al que tenían antes de la falla en r f . Nótese que p queda descartado porque en el árbol de la figura 4 . 4 0 ) es [-I y en lafigura 4.4 (a) es [+I; lo mismo sucede con Lo. Los parámetros seleccionados como causantes de la falla tienen el mismo valor cualitativo en ambos árboles de fallas.
El conjunto de fallas establecido como {R:, J -, K + } ya involucra la explicación de la sección 4.3.1 sobre las dos ramas hacia K que tiene ea. El análisis que sigue utiliza los gráficos temporales que se muestran en lafigura 4.6, figura 4.7 yfigura 4.10.
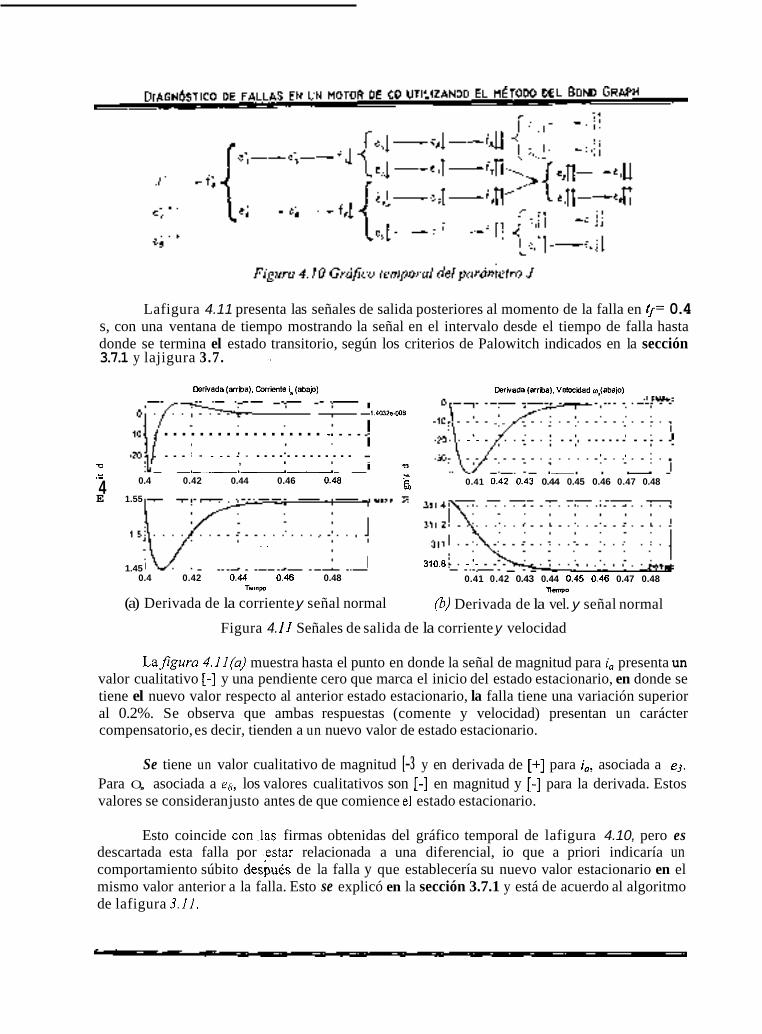
Lafigura 4.11 presenta las señales de salida posteriores al momento de la falla en I/= 0.4 s, con una ventana de tiempo mostrando la señal en el intervalo desde el tiempo de falla hasta donde se termina el estado transitorio, según los criterios de Palowitch indicados en la sección 3.7.1 y lajigura 3.7. ',
DBrNada (anba). W i l e i*(aba@) c m ~ a d a (arraa). v w i a d w,(a~a@)
_' _ l.<m%.M6
.................. ... _, .'. .. ..... ..
... . . ............. . , .:. . . . o , - I
0.41 0.42 0.43 0.44 0.45 0.46 0.47 0.48 .- .___,.. .o
?o 0.4 0.42 0.44 0.46 0.48 .- 4 E 1.55
310.8 .'. 0.41 0.42 0.43 0.44 0.45 0.46 0.47 0.48
, ,
1.45 0.4 0.42 0.44 0.48 0.48
n-s
Figura 4. I 1 Señales de salida de la corriente y velocidad
T m m p
(a) Derivada de la corriente y señal normal (3) Derivada de la vel. y señal normal
Lajigura 4.11(a) muestra hasta el punto en donde la señal de magnitud para i, presenta un valor cualitativo 1-3 y una pendiente cero que marca el inicio del estado estacionario, en donde se tiene el nuevo valor respecto al anterior estado estacionario, la falla tiene una variación superior al 0.2%. Se observa que ambas respuestas (comente y velocidad) presentan un carácter compensatorio, es decir, tienden a un nuevo valor de estado estacionario.
Se tiene un valor cualitativo de magnitud [-3 y en derivada de [+I para io, asociada a ej. Para O,, asociada a e8, los valores cualitativos son [-I en magnitud y [-I para la derivada. Estos valores se consideran justo antes de que comience e1 estado estacionario.
Esto coincide con.las firmas obtenidas del gráfico temporal de lafigura 4.10, pero es descartada esta falla por estar relacionada a una diferencial, io que a priori indicaría un comportamiento súbito después de la falla y que establecería su nuevo valor estacionario en el mismo valor anterior a la falla. Esto se explicó en la sección 3.7.1 y está de acuerdo al algoritmo de lafigura 3.11.
Según este algoritmo y siguiendo los bloques de lafigura 4.8, ahora sólo es necesario comparar las firmas obtenidas de los gráficos causales, que se muestran en la tabla 4.4.
Tabla 4.4. Firmas de los elementos del conjunto de fallas
Como el parámetro J ha sido descartado, el conjunto de hipótesis de falla queda integrado por {R:, K + ) , para decidir entre estos dos parámetros sólo se pueden usar las firmas para e3 (ya que para es no es posible usar las firmas obtenidas de K , por haber sido descartadas). Se nota que los valores cualitativos para e3, obtenidos antes del nuevo estado estacionario, mostrados en la figura 4.11 (a), son iguales a las firmas obtenidas del gráfico temporal debidas a &. Por tanto, el conjunto de hipótesis de falla se reduce hasta quedar como {R: ).
4.6 Resumen de fallas
Como se indicó en la sección 2.5, las fallas simuladas son 10 (dos por cada parámetro), las cuales son introducidas en y= 0.4 segundos, a todas se les aplicó el método de diagnóstico de fallas propuesto ya descrito y ejemplificado hasta ahora.
El Único caso en donde no se pudo reducir el conjunto de hipótesis de falla, fue para el parámetro K, donde sólo se pudo reducir a dos elementos; en los demás casos las fallas fueron correctamente diagnosticadas. En algunas fallas simuladas se presenta el caso en donde se tiene una firma en la posición de derivada de orden cero (o sea, magnitud de señal normal) de valor cualitativo [O] que, por el estudio hecho en este trabajo, la información que pueda dar sobre el comportamiento es nula.
Como ejemplo del caso de derivada de orden cero con valor cualitativo [ O ] entra la falla debida a b, que pertenece al conjunto de hipótesis de falla {L:, p'}, pero como el algoritmo de la )gura 3.11 sobre robustez activa hace que se rechace la falla debida a Lo, ya que la falla es permanente, el método reduce el conjunto al elemento p. Aquí es ventajoso que el conjunto sea formado sólo por dos elementos y que uno de ellos esté relacionado a una diferencial.
Por otro lado, se tienen las fallas en algún parámetro relacionado a una diferencial. Aquí se toma en cuenta al momento de la falla, si hay sobre tiro, pero principalmente, que se extingue el efecto de la falla conforme pasa el tiempo; se puede proceder de dos maneras:
1) formar el conjunto de hipótesis de fallas tomando sólo los elementos de los que ya
2) definir los valores cualitativos de las señales de sálida o los residuos, en los picos se sabe que están relacionados a diferenciales, o
de éstas, ubicándolos en un valor cualitativo [+] Ó [-l.
Cualquiera de las dos opciones es factible si uno se apoya en la efectividad del método. En el segundo caso, el diagnóstico es fácil a priori, debido a que en ningún conjunto de hipótesis de falla se encuentran los dos parámetros relacionados a diferenciales (L. y 4, lo que permite
73
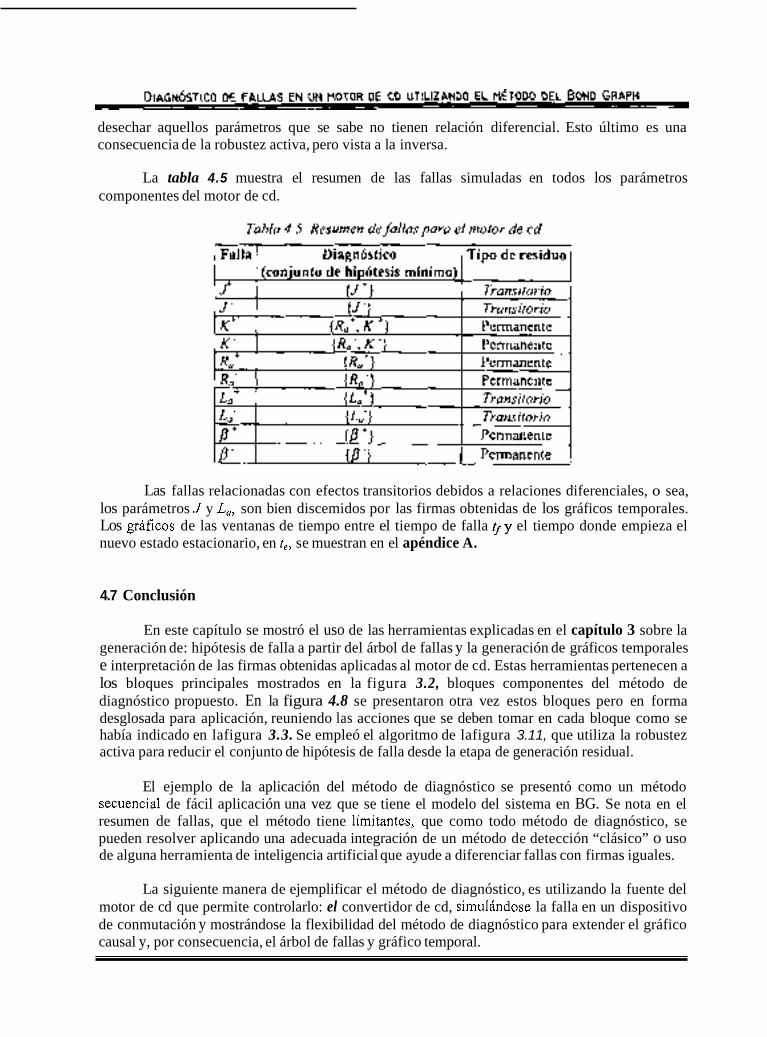
desechar aquellos parámetros que se sabe no tienen relación diferencial. Esto último es una consecuencia de la robustez activa, pero vista a la inversa.
La tabla 4.5 muestra el resumen de las fallas simuladas en todos los parámetros componentes del motor de cd.
Las fallas relacionadas con efectos transitorios debidos a relaciones diferenciales, o sea, los parámetros J y L,, son bien discemidos por las firmas obtenidas de los gráficos temporales. Los gáficos de las ventanas de tiempo entre el tiempo de falla ‘ / y el tiempo donde empieza el nuevo estado estacionario, en te, se muestran en el apéndice A.
4.7 Conclusión
En este capítulo se mostró el uso de las herramientas explicadas en el capítulo 3 sobre la generación de: hipótesis de falla a partir del árbol de fallas y la generación de gráficos temporales e interpretación de las firmas obtenidas aplicadas al motor de cd. Estas herramientas pertenecen a los bloques principales mostrados en la figura 3.2, bloques componentes del método de diagnóstico propuesto. En la figura 4.8 se presentaron otra vez estos bloques pero en forma desglosada para aplicación, reuniendo las acciones que se deben tomar en cada bloque como se había indicado en lafigura 3.3. Se empleó el algoritmo de lafigura 3.11, que utiliza la robustez activa para reducir el conjunto de hipótesis de falla desde la etapa de generación residual.
El ejemplo de la aplicación del método de diagnóstico se presentó como un método secuencia1 de fácil aplicación una vez que se tiene el modelo del sistema en BG. Se nota en el resumen de fallas, que el método tiene limitantes, que como todo método de diagnóstico, se pueden resolver aplicando una adecuada integración de un método de detección “clásico” o uso de alguna herramienta de inteligencia artificial que ayude a diferenciar fallas con firmas iguales.
La siguiente manera de ejemplificar el método de diagnóstico, es utilizando la fuente del motor de cd que permite controlarlo: el convertidor de cd, simulándose la falla en un dispositivo de conmutación y mostrándose la flexibilidad del método de diagnóstico para extender el gráfico causal y, por consecuencia, el árbol de fallas y gráfico temporal.
CAPíTULO 5: DIAGN~STICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
Capítulo 5 Diagnóstico en el conjunto convertidor-motor de cd
5.1 Introducción
El desarrollo de accionamientos de estado sólido para motores ha progresado de manera tal, que cualquier problema de control de potencia puede ser resuelto utilizándolos. Una manera de controlar a los motores de cd es mediante la variación del voltaje de armadura, que es la entrada del sistema, como se indica en las figuras 2.4 y 2.13. Esta variación se puede hacer mediante convertidores de cd-cd o recortadores (choppers).
En este capítulo se presenta el modelo completo del sistema convertidor-motor de cd, comenzando con una breve descripción de los convertidores de cd-cd, su principio de operacion, así como el desarrollo del modelo en BG del convertidor reductor (buck), que operando en uno y dos cuadrantes (mediante combinación de dos de ellos), permite obtener el comportamiento de un convertidor completo cuando funciona como alimentador de voltaje de un motor, también en dos cuadrantes.
El objetivo de este capítulo es mostrar que el uso del método de diagnóstico propuesto se puede extender en un sistema dado si este se extiende también, es decir, cuando el sistema se incorpora a otros, es posible seguir usando el gráfico causal, los árboles de fallas y los gráficos temporales sin realizar grandes modificaciones ni realizar todo el proceso.
En la sección 5.2 se presenta el principio de operación de los convertidores de cd-cd. En la sección 5.3 se presenta el convertidor reductor buck, describiendo su operación y modelado usando variables promediadas, que es la manera normal de representarlo, para después obtener su modelo en términos del BG, el cual se presenta en la sección 5.4.
En la sección 5.5 se explica el convertidor de puente completo. De la sección 5.6 hasta la sección 5.10 se desarrolla el método de diagnóstico propuesto, aplicándolo al acoplamiento del convertidor con el motor de cd, para mostrar la extensión del método, así como su versatilidad. Se termina el capítulo con la presentación de una conclusión en la sección 5.11 sobre el desarrollo del ejemplo.
5.2 El convertidor de cd-cd
En los convertidores de cd-cd, el voltaje de entrada es una fuente de cd de voltaje constante y el voltaje de salida varía cambiando la fracción del tiempo que la fuente entrega a la carga mediante un interruptor de estado sólido. Cuando este dispositivo se dispara, cierra O está
75
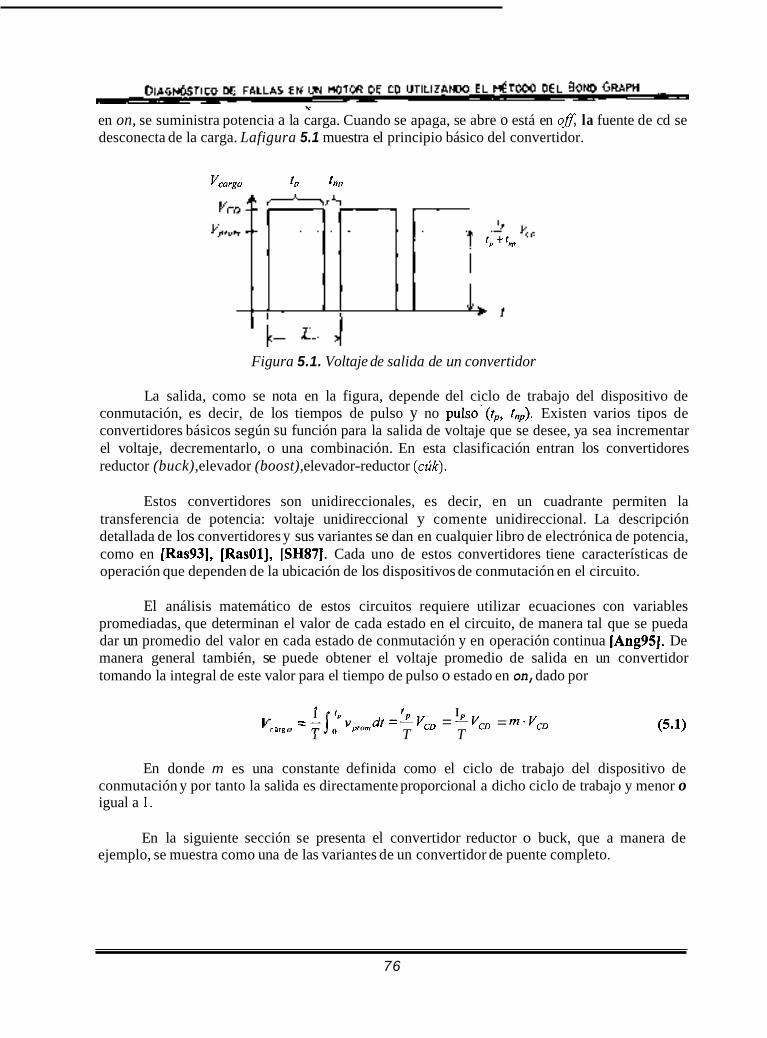
.,: en on, se suministra potencia a la carga. Cuando se apaga, se abre o está en ofi la fuente de cd se desconecta de la carga. Lafigura 5.1 muestra el principio básico del convertidor.
VCWZ" to I"D
2, + 1""
Figura 5.1. Voltaje de salida de un convertidor
La salida, como se nota en la figura, depende del ciclo de trabajo del dispositivo de conmutación, es decir, de los tiempos de pulso y no pulso.(t,, Inp). Existen varios tipos de convertidores básicos según su función para la salida de voltaje que se desee, ya sea incrementar el voltaje, decrementarlo, o una combinación. En esta clasificación entran los convertidores reductor (buck), elevador (boost), elevador-reductor (cúk).
Estos convertidores son unidireccionales, es decir, en un cuadrante permiten la transferencia de potencia: voltaje unidireccional y comente unidireccional. La descripción detallada de los convertidores y sus variantes se dan en cualquier libro de electrónica de potencia, como en (Ras931, [RasOl], [SH87]. Cada uno de estos convertidores tiene características de operación que dependen de la ubicación de los dispositivos de conmutación en el circuito.
El análisis matemático de estos circuitos requiere utilizar ecuaciones con variables promediadas, que determinan el valor de cada estado en el circuito, de manera tal que se pueda dar un promedio del valor en cada estado de conmutación y en operación continua [Ang95]. De manera general también, se puede obtener el voltaje promedio de salida en un convertidor tomando la integral de este valor para el tiempo de pulso o estado en on, dado por
1 t I
T T T (5.1) = -5; vP,,,dt = L V,, = .L V,, = m . V,,
En donde m es una constante definida como el ciclo de trabajo del dispositivo de conmutación y por tanto la salida es directamente proporcional a dicho ciclo de trabajo y menor o igual a 1.
En la siguiente sección se presenta el convertidor reductor o buck, que a manera de ejemplo, se muestra como una de las variantes de un convertidor de puente completo.
76
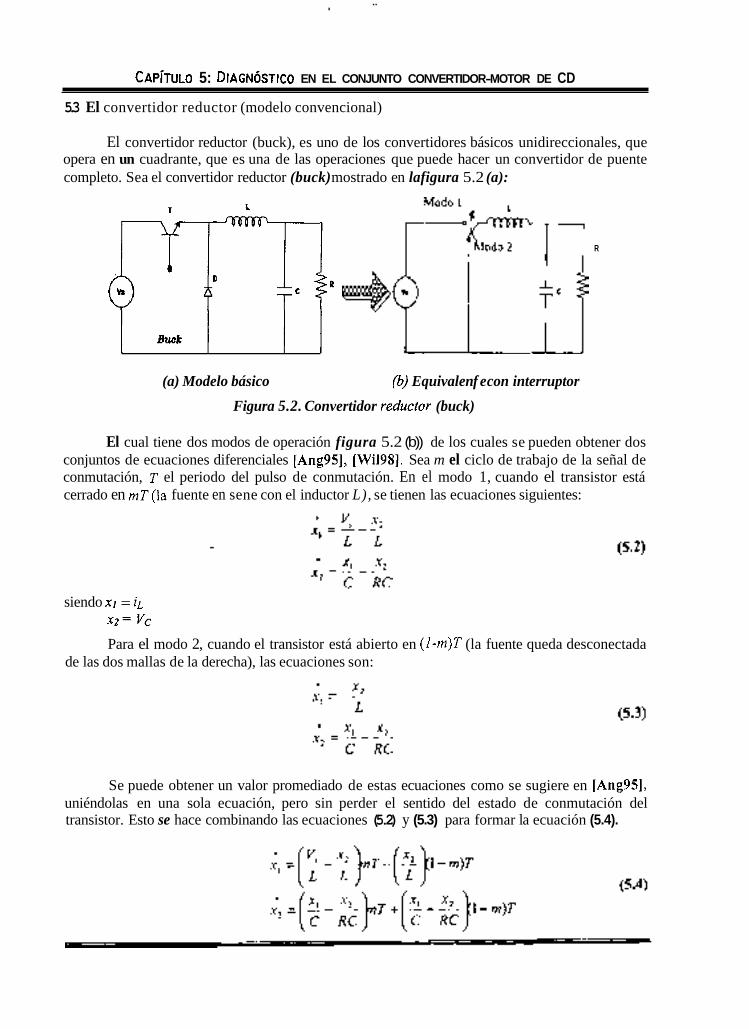
CAPÍTULO 5: DIAGN~STICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
5.3 El convertidor reductor (modelo convencional)
El convertidor reductor (buck), es uno de los convertidores básicos unidireccionales, que opera en un cuadrante, que es una de las operaciones que puede hacer un convertidor de puente completo. Sea el convertidor reductor (buck) mostrado en lafigura 5.2 (a): qTAr-E R
H
Buck
(a) Modelo básico (b) Equivalen f e con interruptor Figura 5.2. Convertidor reductor (buck)
El cual tiene dos modos de operación figura 5.2 (b)) de los cuales se pueden obtener dos conjuntos de ecuaciones diferenciales [Ang95], (WiiSS]. Sea m el ciclo de trabajo de la señal de conmutación, T el periodo del pulso de conmutación. En el modo 1, cuando el transistor está cerrado en mT(la fuente en sene con el inductor L), se tienen las ecuaciones siguientes:
siendo X I = iL x2= vc Para el modo 2, cuando el transistor está abierto en (1-m)T (la fuente queda desconectada
de las dos mallas de la derecha), las ecuaciones son:
Se puede obtener un valor promediado de estas ecuaciones como se sugiere en [Ang95], uniéndolas en una sola ecuación, pero sin perder el sentido del estado de conmutación del transistor. Esto se hace combinando las ecuaciones (5.2) y (5.3) para formar la ecuación (5.4).
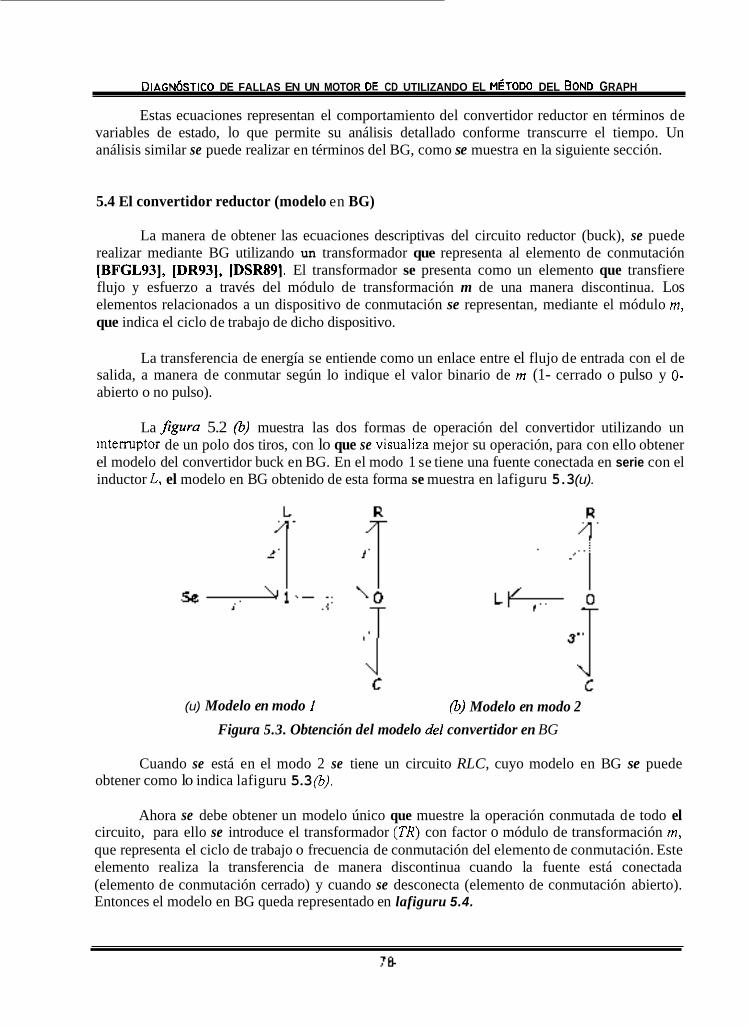
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
Estas ecuaciones representan el comportamiento del convertidor reductor en términos de variables de estado, lo que permite su análisis detallado conforme transcurre el tiempo. Un análisis similar se puede realizar en términos del BG, como se muestra en la siguiente sección.
5.4 El convertidor reductor (modelo en BG)
La manera de obtener las ecuaciones descriptivas del circuito reductor (buck), se puede realizar mediante BG utilizando un transformador que representa al elemento de conmutación (BFGL931, [DR93], (DSR891. El transformador se presenta como un elemento que transfiere flujo y esfuerzo a través del módulo de transformación m de una manera discontinua. Los elementos relacionados a un dispositivo de conmutación se representan, mediante el módulo m, que indica el ciclo de trabajo de dicho dispositivo.
La transferencia de energía se entiende como un enlace entre el flujo de entrada con el de salida, a manera de conmutar según lo indique el valor binario de m (1- cerrado o pulso y 0- abierto o no pulso).
La figuru 5.2 (b) muestra las dos formas de operación del convertidor utilizando un intemptor de un polo dos tiros, con lo que se visualiza mejor su operación, para con ello obtener el modelo del convertidor buck en BG. En el modo 1 se tiene una fuente conectada en serie con el inductor L, el modelo en BG obtenido de esta forma se muestra en lafiguru 5.3 (u).
(u) Modelo en modo I (b) Modelo en modo 2 Figura 5.3. Obtención del modelo del convertidor en BG
Cuando se está en el modo 2 se tiene un circuito RLC, cuyo modelo en BG se puede obtener como lo indica lafiguru 5.3 0).
Ahora se debe obtener un modelo único que muestre la operación conmutada de todo el circuito, para ello se introduce el transformador (TR) con factor o módulo de transformación m, que representa el ciclo de trabajo o frecuencia de conmutación del elemento de conmutación. Este elemento realiza la transferencia de manera discontinua cuando la fuente está conectada (elemento de conmutación cerrado) y cuando se desconecta (elemento de conmutación abierto). Entonces el modelo en BG queda representado en lafiguru 5.4.

E. - .- L .I-
c . Figura 5.4. Modelo del convertidor buck en BG
Una vez más, para una representación general, se utilizan sólo variables de flujo y esfuerzo referenciadas al número de enlace dados en BG, así como las variables generalizadas provenientes de las relaciones integrales, o sea, desplazamiento generalizado y momento generalizado, respectivamente.
Como se puede notar del BG del convertidor, el flujo representa a la corriente y el esfuerzo al voltaje, las variables de estado son la carga en el capacitor (q6 en BG y físicamente carga Q) y los enlaces de flujo magnético en el inductor (PJ en BG y físicamente A), cada una de ellas relacionada, respectivamente, a corriente en el inductor y voltaje en el capacitor.
Las ecuaciones generadas a partir del modelo en BG del convertidor reductor (buck) de la figura 5.4, son las siguientes:
f, = f, = f 4 (5.5) e2 = m . e , (5.10) Ecuaciones del transformador
Ecuaciones de elementos según su causalidad i e3 = e , e4 (5.6) fi = m . f 2 (5.11)
f, =- (5.12)
f -2 (5.13)
e6 =- q6 (5.14)
P L e
f 6 = f 4 -f5 (5.7)
Ecuaciones de unión tipo 1
s - R e, = e, - e6 (5.8)
Se = V, = e, (5.9) C
Ecuaciones de unión tipo O
Ecuación de fuente
Usando (5.6) en la que se sustituyen (5.9), (5.10) y (5.14) por medio de (5.8) para obtener
e, = m e , -- q 6 (5.15) c
y usando (5.7) con sustitución de (5.12) por medio de (5.5) y (5.13) usando (5.8) y (5.14) se obtiene
(5.16)
79
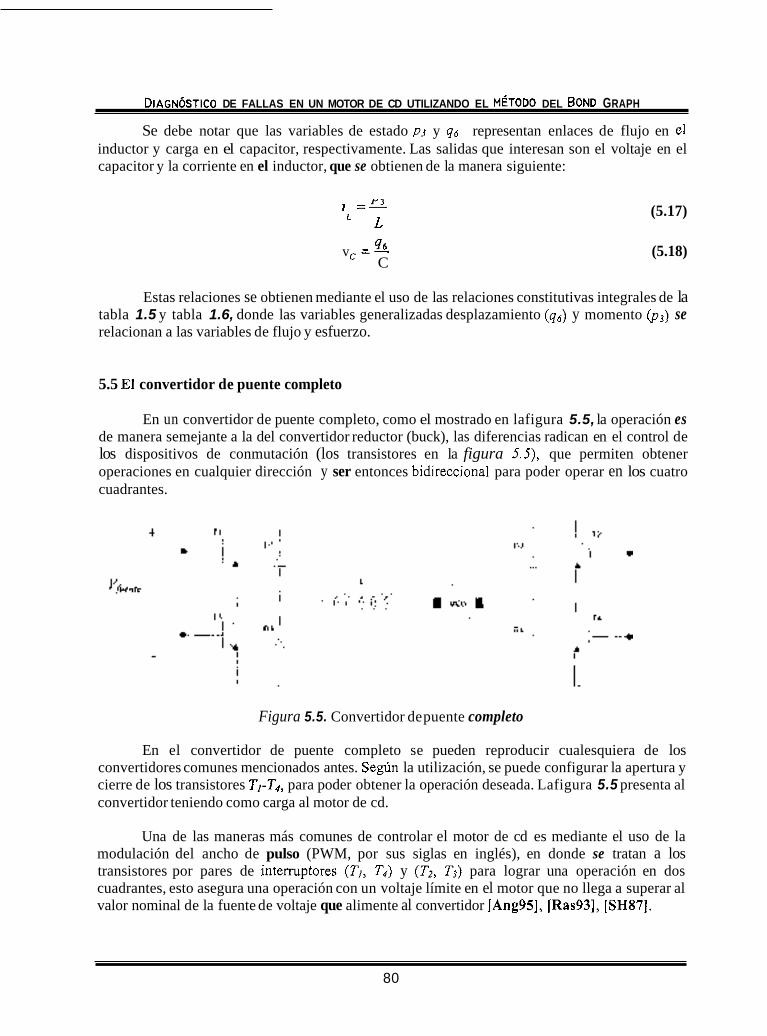
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
Se debe notar que las variables de estado p~ y qa representan enlaces de flujo en el inductor y carga en el capacitor, respectivamente. Las salidas que interesan son el voltaje en el capacitor y la corriente en el inductor, que se obtienen de la manera siguiente:
(5.17) I . P =L L L
46 v -- c - C
(5.18)
Estas relaciones se obtienen mediante el uso de las relaciones constitutivas integrales de la tabla 1.5 y tabla 1.6, donde las variables generalizadas desplazamiento (q6) y momento (p3) se relacionan a las variables de flujo y esfuerzo.
5.5 El convertidor de puente completo
En un convertidor de puente completo, como el mostrado en lafigura 5.5, la operación es de manera semejante a la del convertidor reductor (buck), las diferencias radican en el control de los dispositivos de conmutación (los transistores en la figura 5.5), que permiten obtener operaciones en cualquier dirección y ser entonces bidireccional para poder operar en los cuatro cuadrantes.
Figura 5.5. Convertidor de puente completo
En el convertidor de puente completo se pueden reproducir cualesquiera de los convertidores comunes mencionados antes. Según la utilización, se puede configurar la apertura y cierre de los transistores Tl-Td, para poder obtener la operación deseada. Lafigura 5.5 presenta al convertidor teniendo como carga al motor de cd.
Una de las maneras más comunes de controlar el motor de cd es mediante el uso de la modulación del ancho de pulso (PWM, por sus siglas en inglés), en donde se tratan a los transistores por pares de interruptores (TI, T4) y (Tz, T3) para lograr una operación en dos cuadrantes, esto asegura una operación con un voltaje límite en el motor que no llega a superar al valor nominal de la fuente de voltaje que alimente al convertidor IAng951, IRas931, [SH87].
80
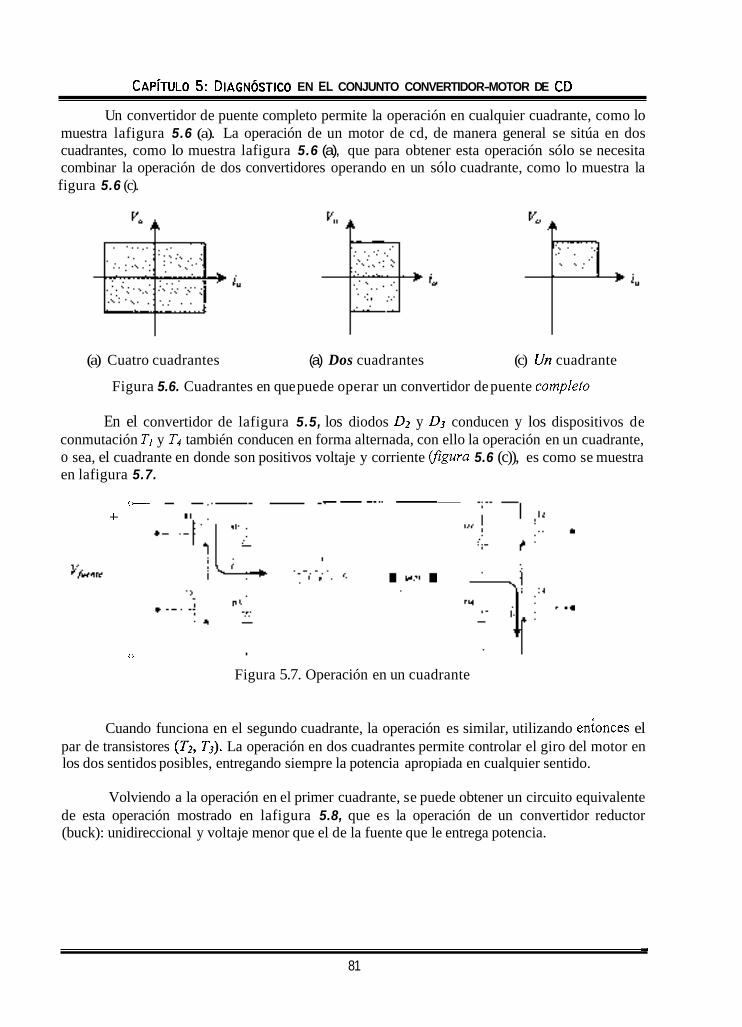
CAPíTULO 5: DIAGNÓSTICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
Un convertidor de puente completo permite la operación en cualquier cuadrante, como lo muestra lafigura 5.6 (a). La operación de un motor de cd, de manera general se sitúa en dos cuadrantes, como lo muestra lafigura 5.6 (a), que para obtener esta operación sólo se necesita combinar la operación de dos convertidores operando en un sólo cuadrante, como lo muestra la figura 5.6 (c).
(a) Cuatro cuadrantes (a) Dos cuadrantes (c) Un cuadrante
Figura 5.6. Cuadrantes en que puede operar un convertidor de puente compieto
En el convertidor de lafigura 5.5, los diodos DI y Dj conducen y los dispositivos de conmutación T, y T, también conducen en forma alternada, con ello la operación en un cuadrante, o sea, el cuadrante en donde son positivos voltaje y corriente Vigura 5.6 (c)), es como se muestra en lafigura 5.7.
<- +
/ i
Figura 5.7. Operación en un cuadrante
Cuando funciona en el segundo cuadrante, la operación es similar, utilizando enionces el par de transistores (T2, T3). La operación en dos cuadrantes permite controlar el giro del motor en los dos sentidos posibles, entregando siempre la potencia apropiada en cualquier sentido.
Volviendo a la operación en el primer cuadrante, se puede obtener un circuito equivalente de esta operación mostrado en lafigura 5.8, que es la operación de un convertidor reductor (buck): unidireccional y voltaje menor que el de la fuente que le entrega potencia.
- 81
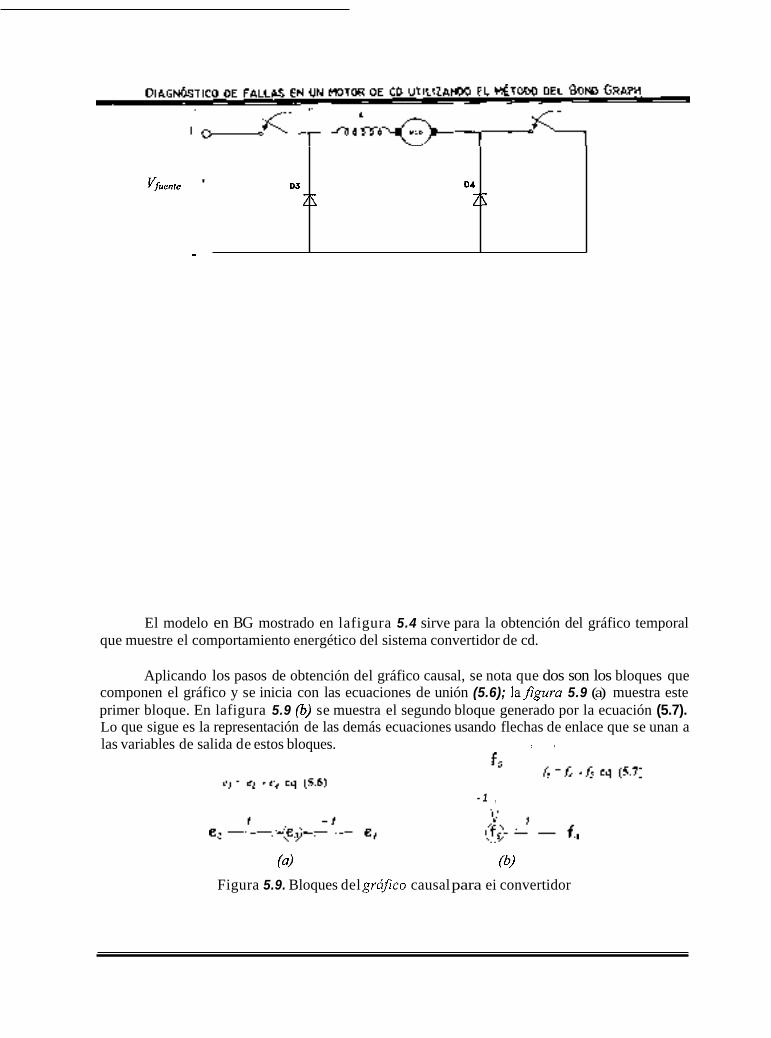
V/,,me ' D3 -
-
El modelo en BG mostrado en lafigura 5.4 sirve para la obtención del gráfico temporal que muestre el comportamiento energético del sistema convertidor de cd.
Aplicando los pasos de obtención del gráfico causal, se nota que dos son los bloques que componen el gráfico y se inicia con las ecuaciones de unión (5.6); lafigura 5.9 (a) muestra este primer bloque. En lafigura 5.9 (b) se muestra el segundo bloque generado por la ecuación (5.7). Lo que sigue es la representación de las demás ecuaciones usando flechas de enlace que se unan a las variables de salida de estos bloques. . I
04
LZ 21
- 1 ,
(0) lb) Figura 5.9. Bloques del grajco causal para ei convertidor
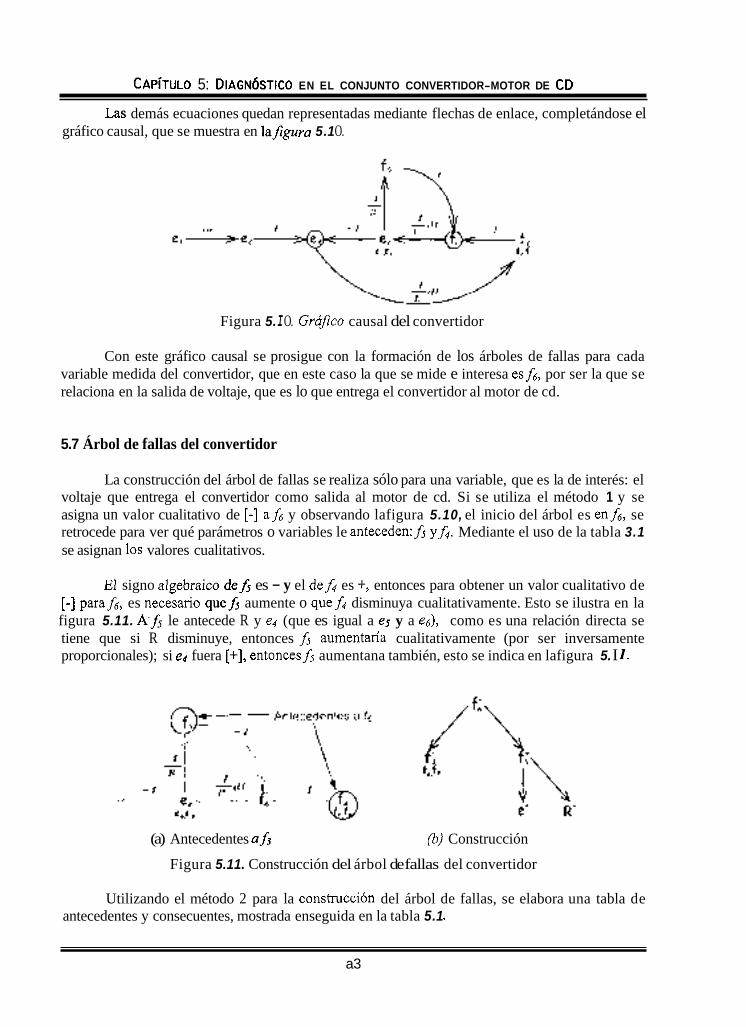
CAPíTULO 5: DIAGN~STICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
Las demás ecuaciones quedan representadas mediante flechas de enlace, completándose el gráfico causal, que se muestra en IajZgura 5. 1 O.
Figura 5. I O. Grájco causal del convertidor
Con este gráfico causal se prosigue con la formación de los árboles de fallas para cada variable medida del convertidor, que en este caso la que se mide e interesa esfa, por ser la que se relaciona en la salida de voltaje, que es lo que entrega el convertidor al motor de cd.
5.7 Árbol de fallas del convertidor
La construcción del árbol de fallas se realiza sólo para una variable, que es la de interés: el voltaje que entrega el convertidor como salida al motor de cd. Si se utiliza el método 1 y se asigna un valor cualitativo de [-3 afa y observando lafigura 5.10, el inicio del árbol es enfa, se retrocede para ver qué parámetros o variables le anteceden:fs yfi. Mediante el uso de la tabla 3.1 se asignan los valores cualitativos.
El signo algebraic0 d e b es - y el def4 es +, entonces para obtener un valor cualitativo de [-I parafa, es necesaIio q u e 5 aumente o quef4 disminuya cualitativamente. Esto se ilustra en la figura 5.11. Afs le antecede R y e4 (que es igual a es y a e6), como es una relación directa se tiene que si R disminuye, entonces fs aumentaría cualitativamente (por ser inversamente proporcionales); si e4 fuera [+I, entoncesfs aumentana también, esto se indica en lafigura 5. I 1 .
(a) Antecedentes ah (b) Construcción
Figura 5.11. Construcción del árbol de fallas del convertidor
Utilizando el método 2 para la conshucción del árbol de fallas, se elabora una tabla de antecedentes y consecuentes, mostrada enseguida en la tabla 5. 1 %
a3
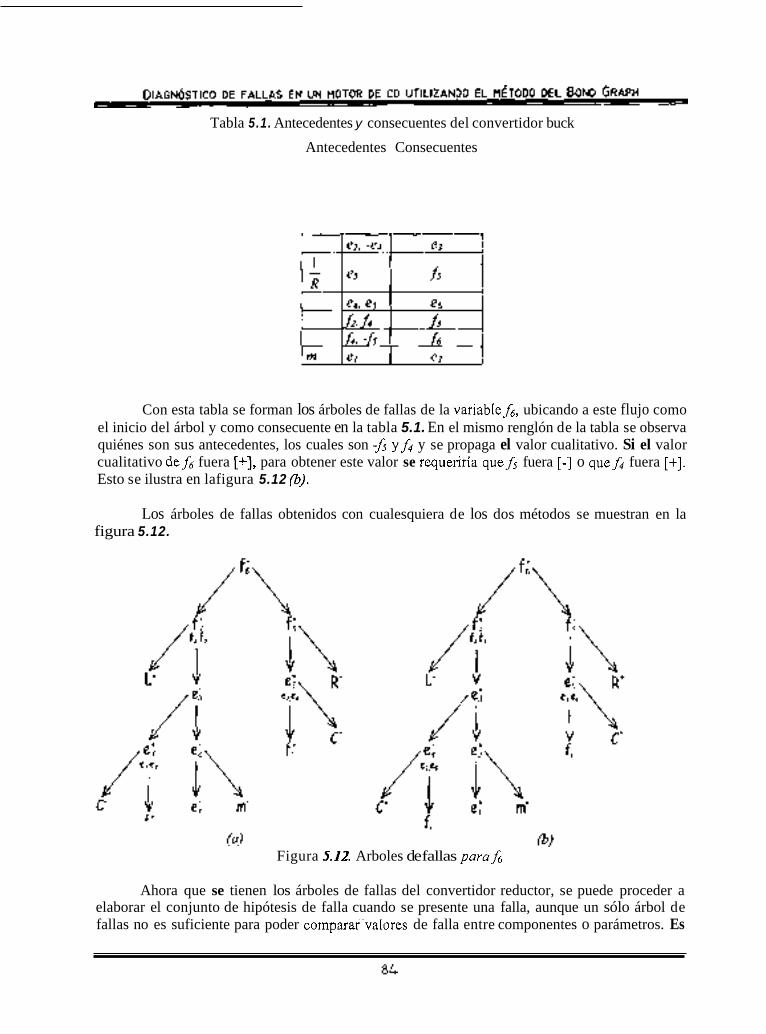
Tabla 5.1. Antecedentes y consecuentes del convertidor buck Antecedentes Consecuentes
Con esta tabla se forman los árboles de fallas de la variable&, ubicando a este flujo como el inicio del árbol y como consecuente en la tabla 5.1. En el mismo renglón de la tabla se observa quiénes son sus antecedentes, los cuales son $1 yh y se propaga el valor cualitativo. Si el valor cualitativo def6 fuera [+I, para obtener este valor se requenria quefs fuera [-] o q u e h fuera [+l. Esto se ilustra en lafigura 5.12 e).
Los árboles de fallas obtenidos con cualesquiera de los dos métodos se muestran en la figura 5.12.
Figura 5.12. Arboles de fallas parafs
Ahora que se tienen los árboles de fallas del convertidor reductor, se puede proceder a elaborar el conjunto de hipótesis de falla cuando se presente una falla, aunque un sólo árbol de fallas no es suficiente para poder comparar'valores de falla entre componentes o parámetros. Es
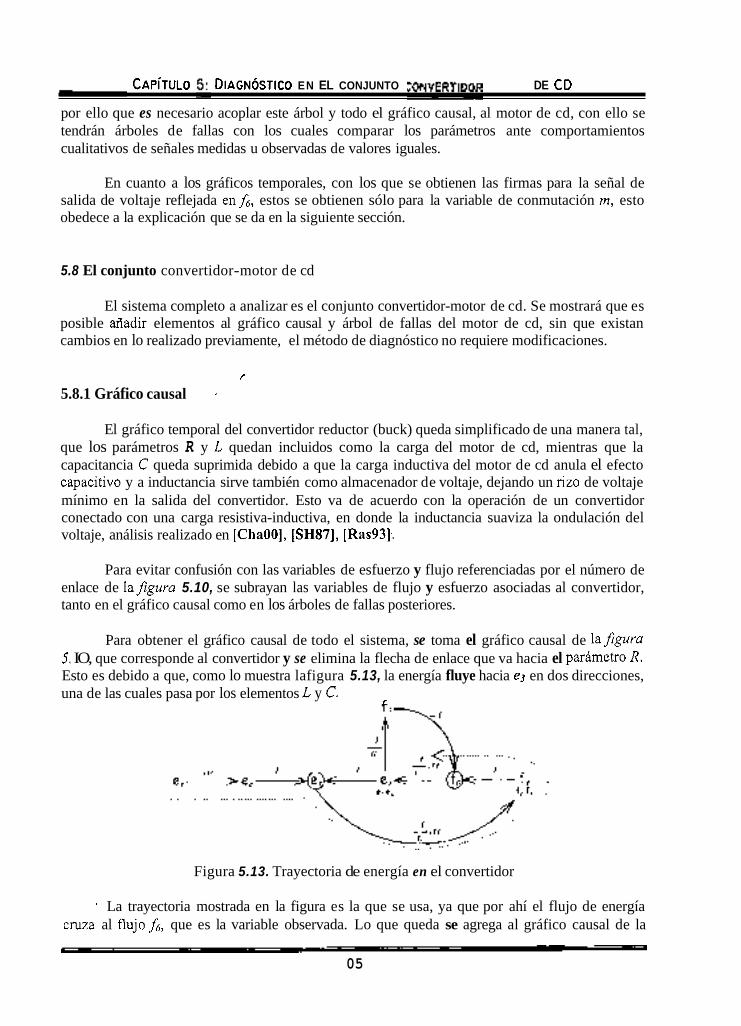
CAPíTULO 5: DIAGN~STICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
por ello que es necesario acoplar este árbol y todo el gráfico causal, al motor de cd, con ello se tendrán árboles de fallas con los cuales comparar los parámetros ante comportamientos cualitativos de señales medidas u observadas de valores iguales.
En cuanto a los gráficos temporales, con los que se obtienen las firmas para la señal de salida de voltaje reflejada enfa, estos se obtienen sólo para la variable de conmutación rn, esto obedece a la explicación que se da en la siguiente sección.
5.8 El conjunto convertidor-motor de cd
El sistema completo a analizar es el conjunto convertidor-motor de cd. Se mostrará que es posible a a d i r elementos al gráfico causal y árbol de fallas del motor de cd, sin que existan cambios en lo realizado previamente, el método de diagnóstico no requiere modificaciones.
I
5.8.1 Gráfico causal I
El gráfico temporal del convertidor reductor (buck) queda simplificado de una manera tal, que los parámetros R y L quedan incluidos como la carga del motor de cd, mientras que la capacitancia C queda suprimida debido a que la carga inductiva del motor de cd anula el efecto capacitivo y a inductancia sirve también como almacenador de voltaje, dejando un rizo de voltaje mínimo en la salida del convertidor. Esto va de acuerdo con la operación de un convertidor conectado con una carga resistiva-inductiva, en donde la inductancia suaviza la ondulación del voltaje, análisis realizado en [ChaOO], [SH87], [Ras93].
Para evitar confusión con las variables de esfuerzo y flujo referenciadas por el número de enlace de l a j g u r a 5.10, se subrayan las variables de flujo y esfuerzo asociadas al convertidor, tanto en el gráfico causal como en los árboles de fallas posteriores.
Para obtener el gráfico causal de todo el sistema, se toma el gráfico causal de lafigura 5. IO, que corresponde al convertidor y se elimina la flecha de enlace que va hacia el parhetro R. Esto es debido a que, como lo muestra lafigura 5.13, la energía fluye hacia e3 en dos direcciones, una de las cuales pasa por los elementos L y C. ,-
Figura 5.13. Trayectoria de energía en el convertidor
' La trayectoria mostrada en la figura es la que se usa, ya que por ahí el flujo de energía cmza al flujofa, que es la variable observada. Lo que queda se agrega al gráfico causal de la
05
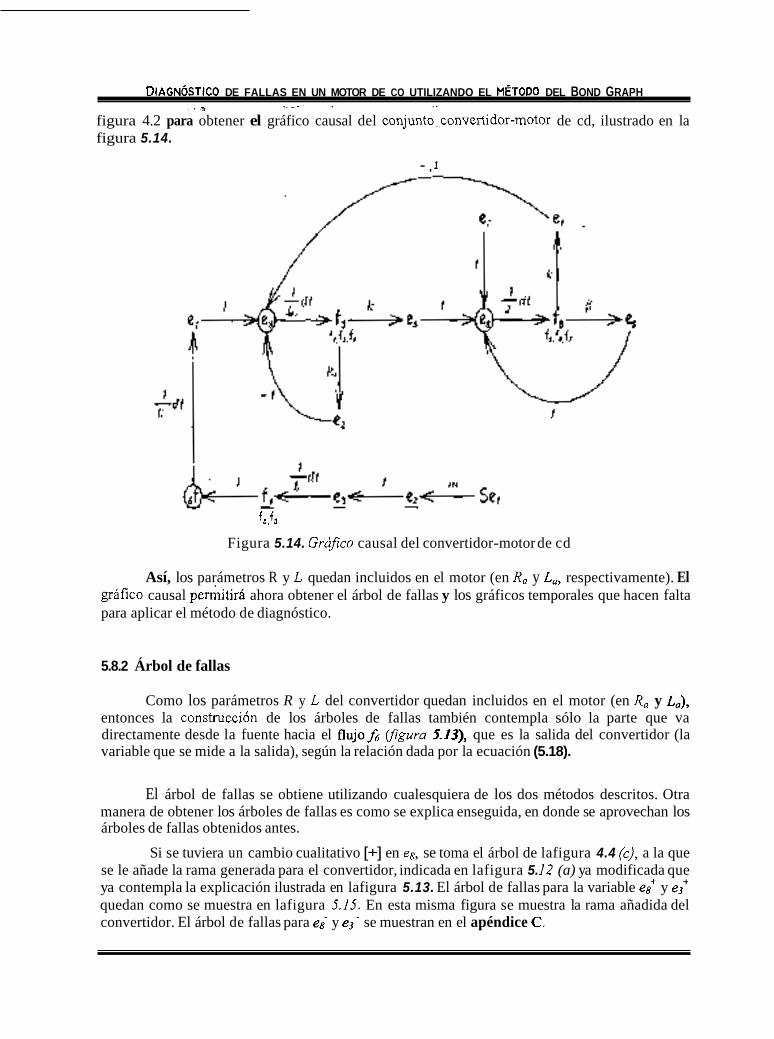
DIAGN~STICO DE FALLAS EN UN MOTOR DE CO UTILIZANDO EL MÉTODO DEL BOND GRAPH
figura 4.2 para obtener el gráfico causal del conjunto.convertidor-motor de cd, ilustrado en la figura 5.14.
~. . . .. < . 1 *
- 1
f, .r, Figura 5.14. Grdfico causal del convertidor-motor de cd
Así, los parámetros R y L quedan incluidos en el motor (en R,, y La, respectivamente). El gáfico causal permitirá ahora obtener el árbol de fallas y los gráficos temporales que hacen falta para aplicar el método de diagnóstico.
5.8.2 Árbol de fallas
Como los parámetros R y L del convertidor quedan incluidos en el motor (en R, y Lo), entonces la constnicción de los árboles de fallas también contempla sólo la parte que va directamente desde la fuente hacia el flujo& vigura 5.13), que es la salida del convertidor (la variable que se mide a la salida), según la relación dada por la ecuación (5.18).
El árbol de fallas se obtiene utilizando cualesquiera de los dos métodos descritos. Otra manera de obtener los árboles de fallas es como se explica enseguida, en donde se aprovechan los árboles de fallas obtenidos antes.
Si se tuviera un cambio cualitativo [+] en ea, se toma el árbol de lafigura 4.4 (c), a la que se le añade la rama generada para el convertidor, indicada en lafigura 5. I2 (a) ya modificada que ya contempla la explicación ilustrada en lafigura 5.13. El árbol de fallas para la variable e; y e: quedan como se muestra en lafigura 5.15. En esta misma figura se muestra la rama añadida del convertidor. El árbol de fallas para e; y ej. se muestran en el apéndice C.
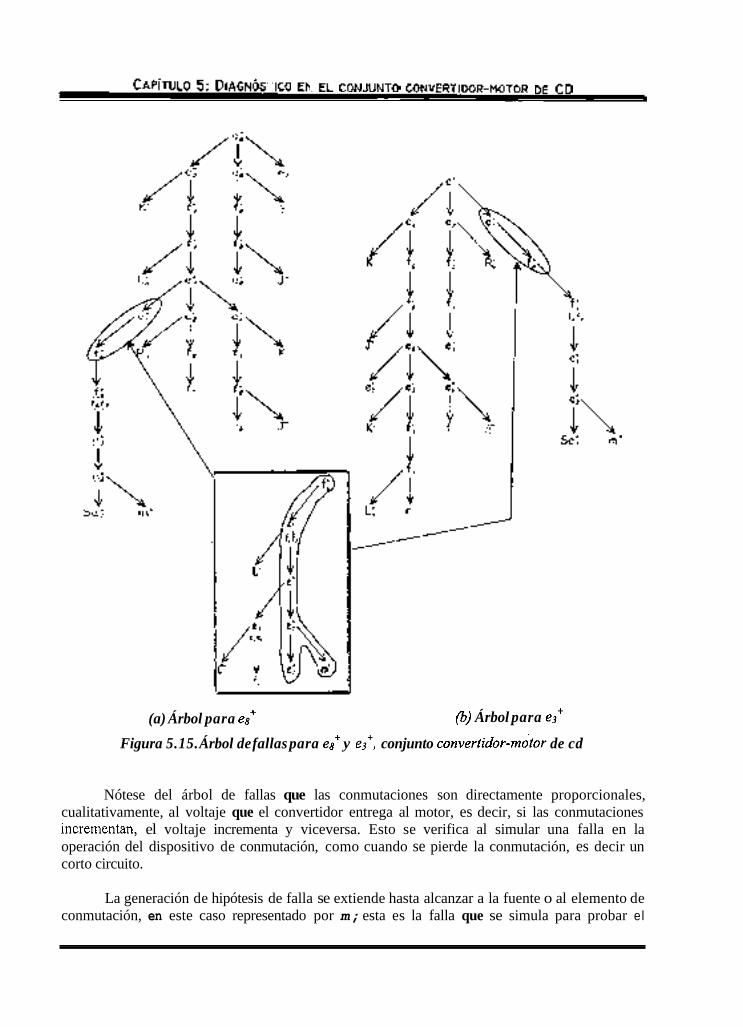
CAPiTULO 5: DIAGNÓSTICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
(a) Árbol para ea' (b) Árbol para e3'
Figura 5.15. Árbol de fallas para eaf y e3+. conjunto convertidor-mo'tor de cd
Nótese del árbol de fallas que las conmutaciones son directamente proporcionales, cualitativamente, al voltaje que el convertidor entrega al motor, es decir, si las conmutaciones incrementan, el voltaje incrementa y viceversa. Esto se verifica al simular una falla en la operación del dispositivo de conmutación, como cuando se pierde la conmutación, es decir un corto circuito.
La generación de hipótesis de falla se extiende hasta alcanzar a la fuente o al elemento de conmutación, en este caso representado por m; esta es la falla que se simula para probar el
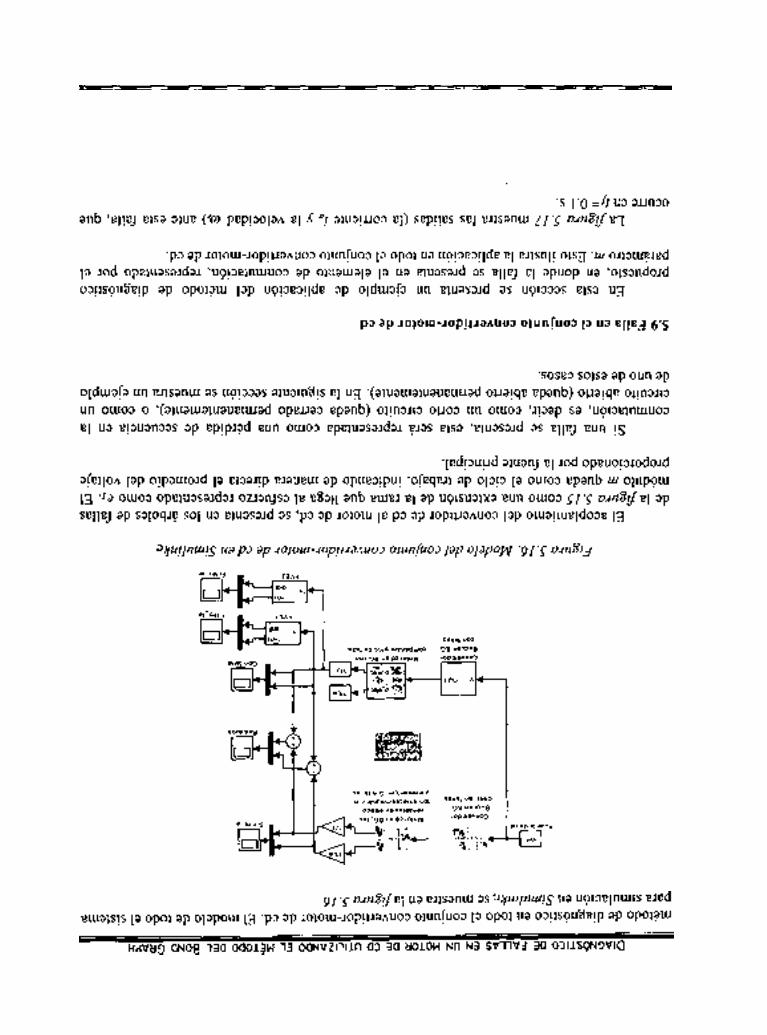
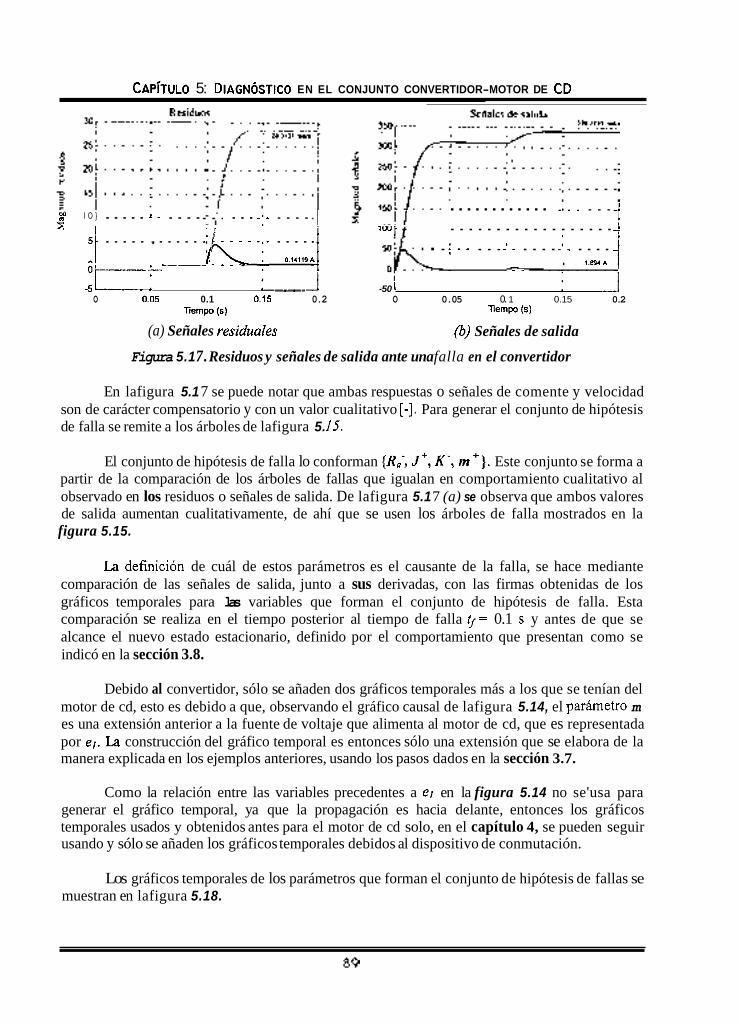
CAPíTULO 5: DIAGN~STICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
& ! . { i lWi t ............ ... _ , _ . i 2 I O } ..... a . .... ... .:. .... .................. 1 w
5 , ..... , ..... _, /"\. _i. .... .] . i . . ... .'. .... .:. .... . , . M A O . I I I < O I or--+ .. - . .
-. -50 L j -1 : J O 0.05 0.1 0.15 0.2 O 0.05 o. 1 0.15 0.2
1
Tiempo ( 5 ) nemw is)
-5 L,
(a) Señales residuales (b) Señales de salida
Figura 5.1 7. Residuos y señales de salida ante una falla en el convertidor
En lafigura 5.1 7 se puede notar que ambas respuestas o señales de comente y velocidad son de carácter compensatorio y con un valor cualitativo [-l. Para generar el conjunto de hipótesis de falla se remite a los árboles de lafigura 5. IS.
El conjunto de hipótesis de falla lo conforman {R;, J+, K , in+). Este conjunto se forma a partir de la comparación de los árboles de fallas que igualan en comportamiento cualitativo al observado en los residuos o señales de salida. De lafigura 5.1 7 (a) se observa que ambos valores de salida aumentan cualitativamente, de ahí que se usen los árboles de falla mostrados en la figura 5.15.
La definición de cuál de estos parámetros es el causante de la falla, se hace mediante comparación de las señales de salida, junto a sus derivadas, con las firmas obtenidas de los gráficos temporales para las variables que forman el conjunto de hipótesis de falla. Esta comparación se realiza en el tiempo posterior al tiempo de falla r / = 0.1 s y antes de que se alcance el nuevo estado estacionario, definido por el comportamiento que presentan como se indicó en la sección 3.8.
Debido al convertidor, sólo se añaden dos gráficos temporales más a los que se tenían del motor de cd, esto es debido a que, observando el gráfico causal de lafigura 5.14, el parhe t ro m es una extensión anterior a la fuente de voltaje que alimenta al motor de cd, que es representada por e,. La construcción del gráfico temporal es entonces sólo una extensión que se elabora de la manera explicada en los ejemplos anteriores, usando los pasos dados en la sección 3.7.
Como la relación entre las variables precedentes a e, en la figura 5.14 no se'usa para generar el gráfico temporal, ya que la propagación es hacia delante, entonces los gráficos temporales usados y obtenidos antes para el motor de cd solo, en el capítulo 4, se pueden seguir usando y sólo se añaden los gráficos temporales debidos al dispositivo de conmutación.
Los gráficos temporales de los parámetros que forman el conjunto de hipótesis de fallas se muestran en lafigura 5.18.
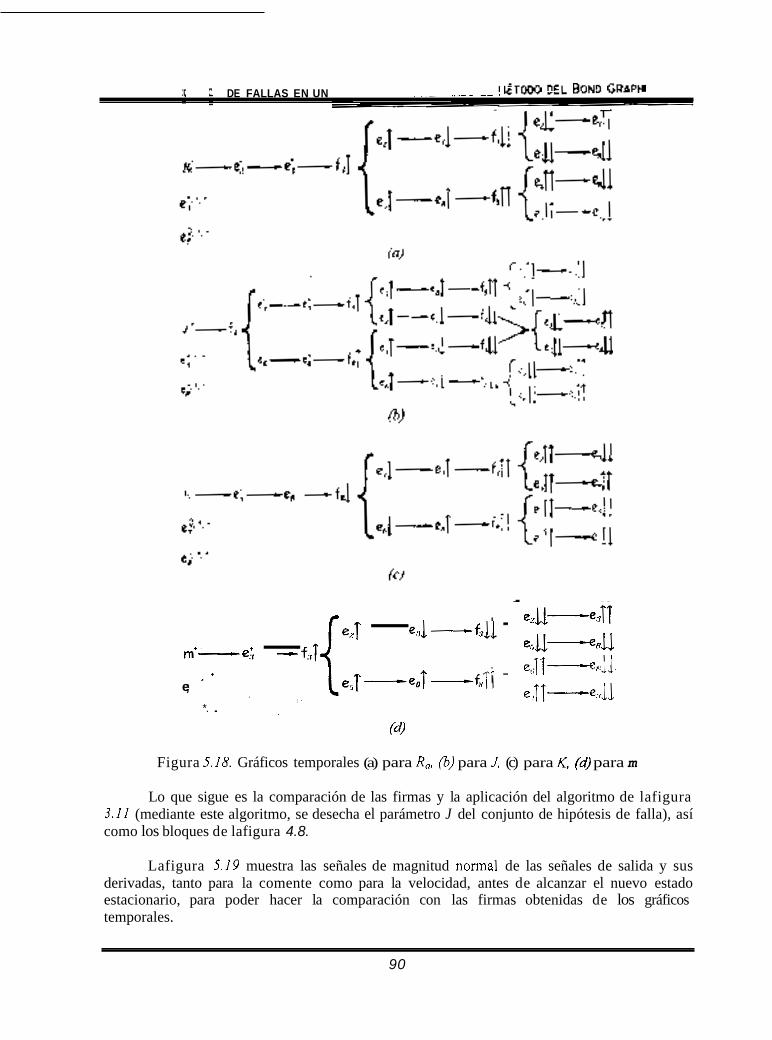
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
e2U-e:JT
e,jJ-&
e,;J 1 -J. eITT----e:J
e,T - e.?1 -tJL
e,r -eOT -tTI
(4
, , , { m+- e.; - f:,T
e; *
*. .
Figura 5.18. Gráficos temporales (a) para R , (3) para J, (c) para K, (4 para m
Lo que sigue es la comparación de las firmas y la aplicación del algoritmo de lafigura 3 . I f (mediante este algoritmo, se desecha el parámetro J del conjunto de hipótesis de falla), así como los bloques de lafigura 4.8.
Lafigura 5.19 muestra las señales de magnitud normal de las señales de salida y sus derivadas, tanto para la comente como para la velocidad, antes de alcanzar el nuevo estado estacionario, para poder hacer la comparación con las firmas obtenidas de los gráficos temporales.
90
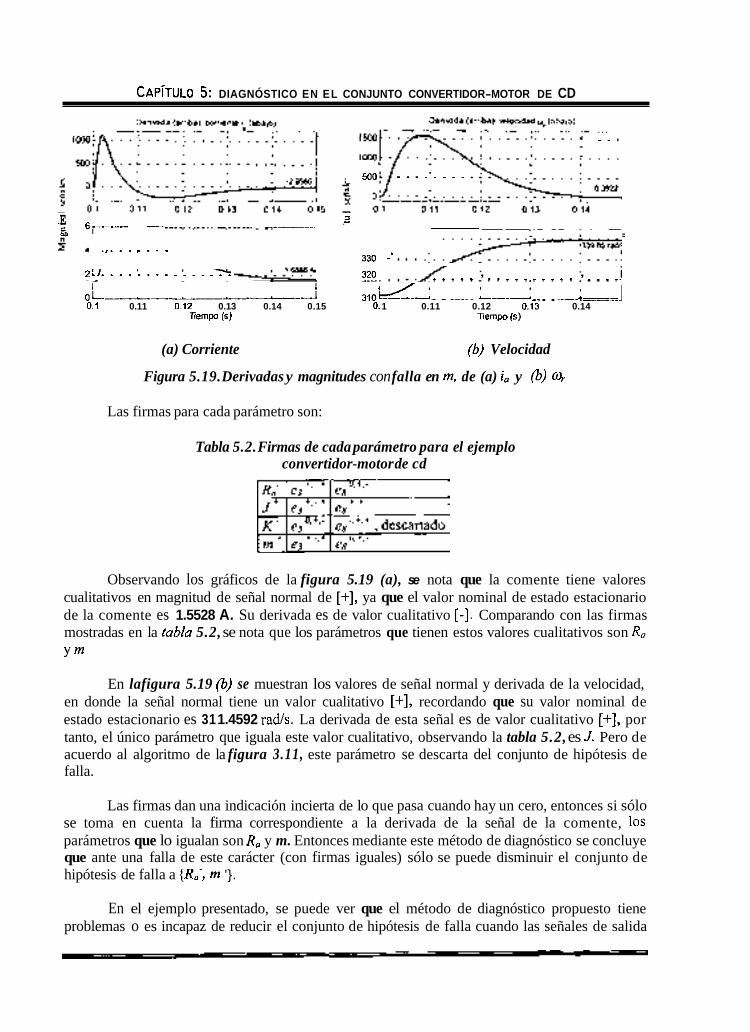
CAPíTULO 5: DIAGNÓSTICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
. . . ..
500 ..........
3 - .- E .- ~ 6r .-_- _- ~ _ _ _
........ 330 -'
2 .................. 320 , , ..... ........... . . . . .
' 1 1 1 I O L _.-__I_-_L ---.---I 3 1 0 d - L--/ ....... 0.1 0.11 0.12 0.13 0.14 0.15 o. 1 0.11 0.12 0.13 0.14
i7em.m (s) 3Íem.m ( 5 )
(a) Corriente (b) Velocidad
Figura 5.19. Derivadas y magnitudes con falla en m. de (a) io y (b) ~ r ,
Las firmas para cada parámetro son:
Tabla 5.2. Firmas de cada parámetro para el ejemplo convertidor-motor de cd
Observando los gráficos de la figura 5.19 (a), se nota que la comente tiene valores cualitativos en magnitud de señal normal de [+I, ya que el valor nominal de estado estacionario de la comente es 1.5528 A. Su derivada es de valor cualitativo [-l. Comparando con las firmas mostradas en la tubfa 5.2, se nota que los parámetros que tienen estos valores cualitativos son R, Y m
En lafigura 5.19 (b) se muestran los valores de señal normal y derivada de la velocidad, en donde la señal normal tiene un valor cualitativo [+I, recordando que su valor nominal de estado estacionario es 31 1.4592 radís. La derivada de esta señal es de valor cualitativo [+I, por tanto, el único parámetro que iguala este valor cualitativo, observando la tabla 5.2, es J . Pero de acuerdo al algoritmo de la figura 3.11, este parámetro se descarta del conjunto de hipótesis de falla.
Las firmas dan una indicación incierta de lo que pasa cuando hay un cero, entonces si sólo se toma en cuenta la firma correspondiente a la derivada de la señal de la comente, los parámetros que lo igualan son R, y m. Entonces mediante este método de diagnóstico se concluye que ante una falla de este carácter (con firmas iguales) sólo se puede disminuir el conjunto de hipótesis de falla a {Ri, m '}.
En el ejemplo presentado, se puede ver que el método de diagnóstico propuesto tiene problemas o es incapaz de reducir el conjunto de hipótesis de falla cuando las señales de salida
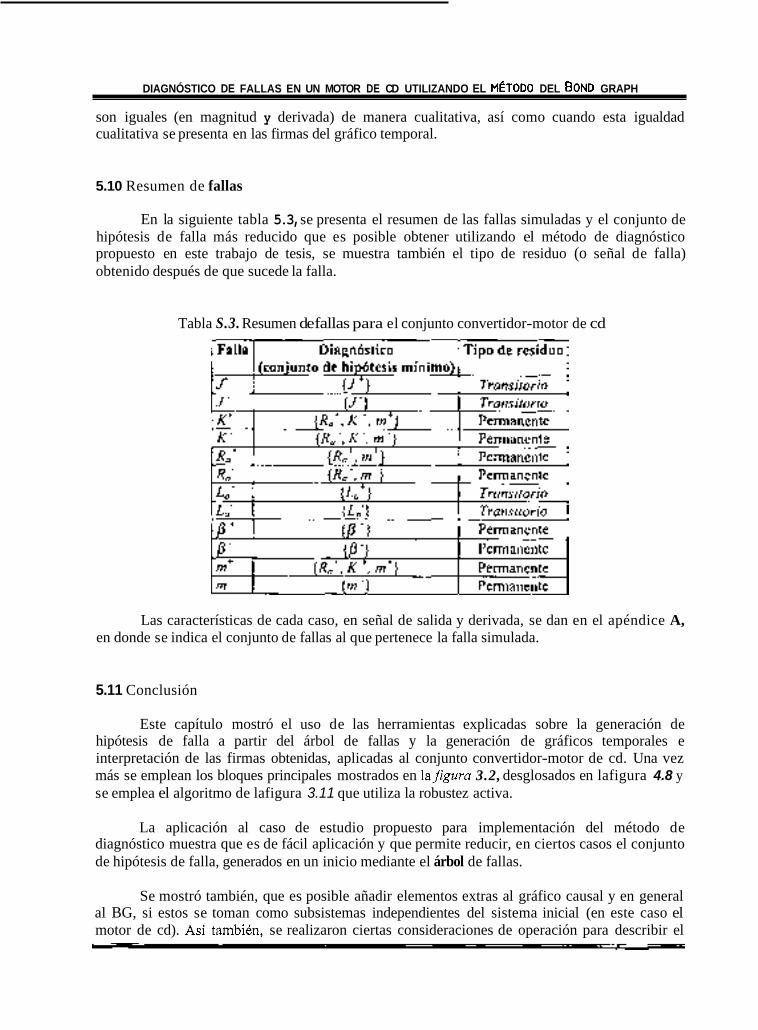
DIAGNÓSTICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
son iguales (en magnitud y derivada) de manera cualitativa, así como cuando esta igualdad cualitativa se presenta en las firmas del gráfico temporal.
5.10 Resumen de fallas
En la siguiente tabla 5.3, se presenta el resumen de las fallas simuladas y el conjunto de hipótesis de falla más reducido que es posible obtener utilizando el método de diagnóstico propuesto en este trabajo de tesis, se muestra también el tipo de residuo (o señal de falla) obtenido después de que sucede la falla.
Tabla S.3. Resumen de fallas para el conjunto convertidor-motor de cd
Las características de cada caso, en señal de salida y derivada, se dan en el apéndice A, en donde se indica el conjunto de fallas al que pertenece la falla simulada.
5.11 Conclusión
Este capítulo mostró el uso de las herramientas explicadas sobre la generación de hipótesis de falla a partir del árbol de fallas y la generación de gráficos temporales e interpretación de las firmas obtenidas, aplicadas al conjunto convertidor-motor de cd. Una vez más se emplean los bloques principales mostrados en IaJgura 3.2, desglosados en lafigura 4.8 y se emplea el algoritmo de lafigura 3.11 que utiliza la robustez activa.
La aplicación al caso de estudio propuesto para implementación del método de diagnóstico muestra que es de fácil aplicación y que permite reducir, en ciertos casos el conjunto de hipótesis de falla, generados en un inicio mediante el árbol de fallas.
Se mostró también, que es posible añadir elementos extras al gráfico causal y en general al BG, si estos se toman como subsistemas independientes del sistema inicial (en este caso el motor de cd). Así tambih, se realizaron ciertas consideraciones de operación para describir el
CAPíTULO 5 : DIAGN~STICO EN EL CONJUNTO CONVERTIDOR-MOTOR DE CD
comportamiento del convertidor al momento de acoplarlo al motor de cd. Aquí se remite directamente al principio de superposición, debido al carácter lineal del sistema completo.
En el siguiente apartado se dan las conclusiones generales sobre el método propuesto y desarrollado, en general y de cada uno de los capítulos desarrollados en esta tesis.
93
Conclusiones En este trabajo de tesis se desarrolló y presentó un método de diagnóstico basado en la
teona del BG, cuya aplicación es secuencial y pretende ser general debido a la teoría misma de modelado del BG. Esto cumple con el objetivo general de este trabajo de tesis. Se explotaron las caractensticas causales generales de modelado del BG, lo que permite pensar en aplicaciones a sistemas más complejos, desde uno con carácter no lineal hasta uno conformado por varios subsistemas de naturaleza distinta. El método de modelado de BG se presenta como de carácter general de aplicación, así como la manera secuencial de aplicar sus reglas de modelado, lo que pemite extender su uso a otros campos de aplicación, como el de diagnóstico, esto debido principalmente a las relaciones causales existentes que muestra el modelo gráfico obtenido.
Se definió un protocolo de fallas para el modelo del motor de cd, estableciéndose un modelo del convertidor y del motor de cd en términos del BG, así como un método de diagnóstico que se probó aplicándose al conjunto convertidor-motor de cd.
El método desarrollado se muestra general porque usa elementos del BG de igual manera que como se modela cualquier sistema cuando se usa este método. Esto lleva a pensar en que si con BG se puede modelar casi cualquier sistema físico, entonces también se puede extrapolar de igual forma el método de diagnóstico a cualquier sistema físico. El método permite ser utilizado en conjunto con los métodos de detección de fallas más comunes basados en el modelo, debido a que las ecuaciones que se obtienen del BG, mediante una transformación, pueden representar a las variables más comunes del sistema, con lo que se permite la integración de métodos de detección y diagnóstico de fallas".
El BG ya se ha presentado en varios temas de estudio enfocados al diagnóstico de fallas, pero el tratamiento causal y de propagación a lo largo de los elementos componentes basándose en las relaciones de causalidad, así como los criterios que contemplan la parte transitoria de comparación de firmas, se muestra aquí como una nueva manera de adaptarlo para análisis en la detección del origen de una falla, mediante el comportamiento posterior a la misma.
Los pasos para diagnosticar a partir de un modelo en BG, mediante el método de diagnóstico propuesto y de manera secuencial, son:
residuos distintos de cero y síntomas de falla a partir de ellos (descartar como fallas aquellas con relación diferencial-robustez activa-) Elaborar un conjunto de hipótesis de falla
o Modelo del sistema en BG. o Elaborar un gráfico causal. o Construir un árbol de fallas.
' la integración se refiere a combinar métodos de detección usando las mismas scíiales de entrada y salida del sistema tratado
94
formas de las variables de
y revisar signos de derivadas interés
de las señales de salida variables que forman el conjunto de
o Elaborar un gráfico temporal de las
o Reducir el conjunto de fallas utilizando las firmas obtenidas del gráfico temporal.
Los puntos anteriores se presentaron en lafiguru 3.2 yfigura 4.8, constituyen el núcleo de este trabajo. El método se presenta como una manera más fácil de diagnosticar fallas respecto a otros métodos que emplean relaciones matemáticas complejas. Todas las ventajas de este método son obtenidas directamente de las ventajas que por sí solo tiene el BG como método de modelado.
De la aplicación del método de diagnóstico desarrollado y aplicado al conjunto convertidor-motor de cd, se concluye lo siguiente:
1. Se tiene un modelo del motor de cd, que permite ver las mismas características que tiene uno modelado en forma “normal”. El modelo de diagnóstico es similar al de control (representativo del sistema), debido a que no se tienen que añadir o considerar más elementos que los que ya se tienen.
2. La generación del modelo (y de cualquier otro) es secuencial, y utiliza los mismos símbolos. Asimismo la obtención del árbol de fallas, el gráfico causal, el gráfico temporal y la generación de firmas.
3. Con dos señales de salida (y otras dos de las derivadas de éstas) es posible diagnosticar las 10 fallas presentes en el motor de cd, sin tener que hacer un esfuerzo matemático mayor para la generación de residuos, como sucede en los artículos de Isermann en [lse84], y en el de Holfling en (HP941.
4. No se requiere análisis estadístico, historia del proceso, ni información heurística para determinar quién es causante de la falla, como lo hacen Isermann en [Ise94] y Patton en [Pat97].
5. Se necesita sólo una ventana de tiempo, desde el tiempo de falla, $ hasta el tiempo donde se alcanza el nuevo estado estacionario, g, para definir el causante de la falla. Un tiempo mayor sería necesario para definir el nuevo valor de estado estacionario posterior a la
6. Para la identificación de cuándo ha ocumdo la falla, no se requiere un método nuevo de detección. Se pueden usar cualesquiera de los más comunes: ecuaciones de paridad, observadores, identificación de parámetros. El modelo en BG así lo permite.
7. Este método tiene como desventaja la incapacidad de identificar plenamente una falla en un parámetro relacionado a una diferencial, porque esta se extingue rápidamente. En sistemas con ruido sena una gran desventaja en la identificación de la falla.
8. Este método es incapaz de distinguir el causante de la falla cuando las firmas obtenidas del gráfico temporal son iguales para ambos parámetros, y cuando los síntomas de falla son iguales, cualitativamente.
9. Se necesita adquirir las señales de la forma más limpia posible, es decir, requiere un filtrado bueno para evitar interpretaciones erróneas.
falla. I
I
95
10. A diferencia de Mosterman et al (MB971, donde sugiere el uso de gráficos temporales y lo aplica a un sistema hidráulico (lento), así como Kohda et al. en (KKF1931 y (KITA991, aquí se trata con un sistema electromecánico que tiene una constante de tiempo rápida.
11. No se requiere el uso de encadenamiento de fallas estructural en donde se use un algoritmo de búsqueda, como los usados en (ACCOOl, [MGOO] donde se usa alguna herramienta inteligente a partir de un árbol de fallas obtenido del BG.
12. Mediante este método, es posible añadir elementos para extender el gráfico causal, árbol de fallas y gráfico temporal, como se mostró con el convertidor, si el modelo se extendiera o refinara, y esto no afectaría lo realizado previamente. Esto está apegado a la teoría de campos inherente al BG [BroOl], [KMR90], [Web021, (Tho901, ((3961, (Blu821.
Respecto a trabajos futuros sugeridos, se considera lo siguiente:
a) Probar el método en un sistema MIMO. En principio no debe existir mayor problema que el de la formación de árboles de fallas y gráficos causales, cuyo número incrementaría, y para mayor eficacia, se complementa con el punto b).
b) A partir de los pasos para generación de árboles y gráficos temporales, crear un programa que realice estos métodos para crear un sistema de diagnóstico computacional de fácil aplicación. Se incorporarían a manera de algoritmos las etapas de detección, umbral y comparación.
c) Aplicar el método a un sistema no lineal. En principio requeriría expresar las relaciones entre componentes de forma energética, utilizando relaciones en términos de energía cinética y potencial, así como ubicar la operación lineal del sistema. Esto lleva implícito a los sistemas conservativos y no conservativos.
d) Para hacer más general el sistema de diagnóstico propuesto y desarrollado, en el sentido de detección de todo tipo de fallas (aditivas y multiplicativas), se recomienda utilizar la integración de métodos de detección, así como lo sugiere Isermann en IIse94). Se consideraría la posibilidad de utilizar alguno de los métodos basados en el modelo, e implementarlo junto con este método, entonces se exploraría la manera de discemir los tipos de fallas. Lo anterior podría incluir los tipos de fallas dinámicas: súbita, intermitente, incipiente, ruidosa.
e) implementar el método ante señales de entrada ruidosas y perturbaciones, para observar el desempeño de comportamiento en estas condiciones y perfeccionar el método.
f ) Definir elementos auxiliares para poder minimizar el conjunto de hipótesis de falla a un solo elemento, esto cuando el método de diagnóstico falla, como en los casos mencionados.
Aportaciones
La principal aportación de este trabajo de tesis, es el enfoque general mediante un método causal y energético de modelado de sistemas fisicos, que permite aplicación en conjunto con otros métodos de diagnóstico. El método aquí presentado y desarrollado es original, se siguiere para aplicación general debido a la naturaleza misma del método de Bond Graph.
Las aportaciones se pueden señalar como sigue:
96
1. El ordenamiento por bloques y la introducción del bloque del gráfico temporal, mostrado en lafigura 3.3, desglosado para aplicación y mostrado en lafigura 4.8, es original para aplicación en diagnóstico de fallas debido a que no se ha explorado esta manera de diagnosticar basándose en relaciones causales posteriores al tiempo de falla y antes de alcanzar el nuevo estado estacionario.
2. Formación y ordenamiento de criterios con los cuales aplicar el último bloque (gráfico temporal) con la finalidad de determinar el origen de la falla mediante la reducción de un primer conjunto de hipótesis de falla usando la comparación con las firmas que se obtienen del gráfico temporal.
3. Uso de la robustez activa incorporada como herramienta de reducción del conjunto de hipótesis de falla desde la detección, para hacer más fácil el uso del último bloque de método de diagnóstico propuesto.
Se presenk un precedente para apoyar investigaciones futuras relacionadas al diagnóstico de fallas, ya que se puede usar la integración de métodos de detección y diagnóstico de fallas para mejorar y hacer más confiable el método propuesto, en este sentido se puede pensar en aplicaciones a sistemas no lineales enfocado a motores de corriente alterna (ca), sobre los cuales ya se desarrollan trabajos sobre su control y diagnóstico de fallas dentro del cenidet.
97
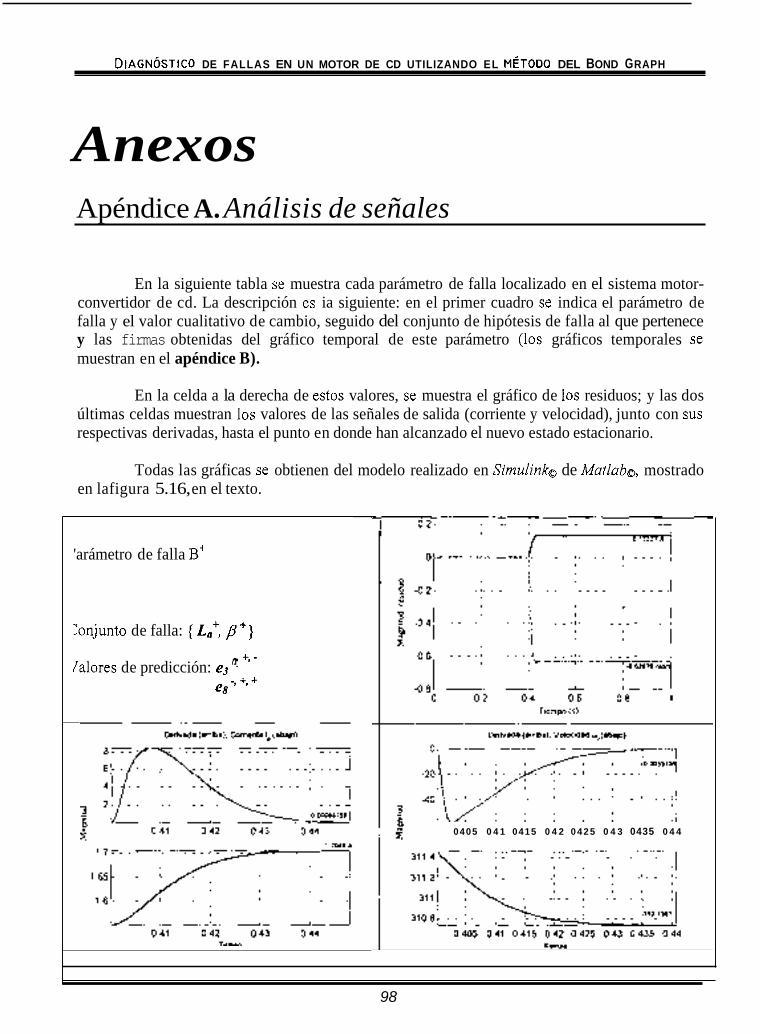
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
Anexos Apéndice A. Análisis de señales
En la siguiente tabla se muestra cada parámetro de falla localizado en el sistema motor- convertidor de cd. La descripción es ia siguiente: en el primer cuadro se indica el parámetro de falla y el valor cualitativo de cambio, seguido del conjunto de hipótesis de falla al que pertenece y las firmas obtenidas del gráfico temporal de este parámetro (los gráficos temporales se muestran en el apéndice B).
En la celda a la derecha de estos valores, se muestra el gráfico de los residuos; y las dos últimas celdas muestran los valores de las señales de salida (corriente y velocidad), junto con sus respectivas derivadas, hasta el punto en donde han alcanzado el nuevo estado estacionario.
Todas las gráficas se obtienen del modelo realizado en Sirnulink de Mutluba, mostrado
- en lafigura 5.16, en el texto.
'arámetro de falla B'
:onjunto de falla: ( Lat, p' )
lalores de predicción: e3 +, ~
e8 -9 +, +
0405 0 4 1 0415 0 4 2 0 4 2 5 0 4 3 0435 0 4 4
98
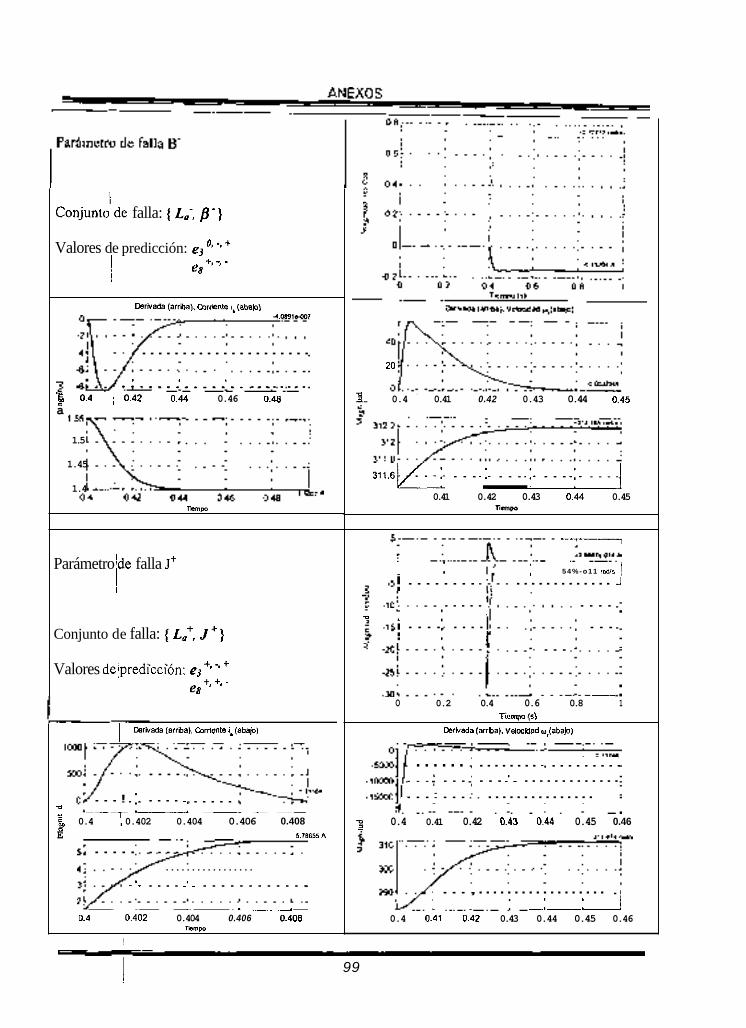
I I
Conjunto'de falla: { L.; p-1
Valores de predicción: e3 o,z+ ea +, -2 -
Osriuada larrba). o>r,i?nLa (abapl 4.c631-1
.....................
. ! . . . . . . . . . . . I . . ........ ._ # 0.4 ~ 0.42 0.44 0.46 0.48 a
1.5
1.45
1.4
TknW
Parámetro !de falla J+ 1 I
Conjunto de falla: {La+, J + ]
Valores delpredicción: e3 +! -' + 1 . .
e8 +, +. -
j Osrkada (arrba), COrrienle 1, labapl
....
... .... ! .:. ., , ..... L .
m
$ 0.4 ! 0.402 0.404 0.406 0.408 E 5.78651A
..... .... ..... . . . . . . . . . . . .
:. .... :. ............ ..
0.4 0.402 0.404 0.406 0.408 ramw
!
20
m .. 2 0.4 ' 0.41 0.42 0.43 0.44 0.45
J11.6t/:- ... .:. ... .!. ... _ I _ ... 4 . 0.41 0.42 0.43 0.44 0.45
n-
--y7
......... : : 5 4 % - o 1 1 redis 1 ........ ............. i
..... .... .... .... ...
...
_- O 0.2 0.4 0.6 0.8 1
Qrbada íarrba). VelocüSd w,lababl T k w ( s )
m
...... ........ ., ......... ... ... ... .'. ............. ... : ... ...............
3 0.4 0.41 0.42 0.43 0.44 0.45 0.46 -
... , .................. : L--:-A
0.4 0.41 0.42 0.43 0.44 0.45 0.46
99 1
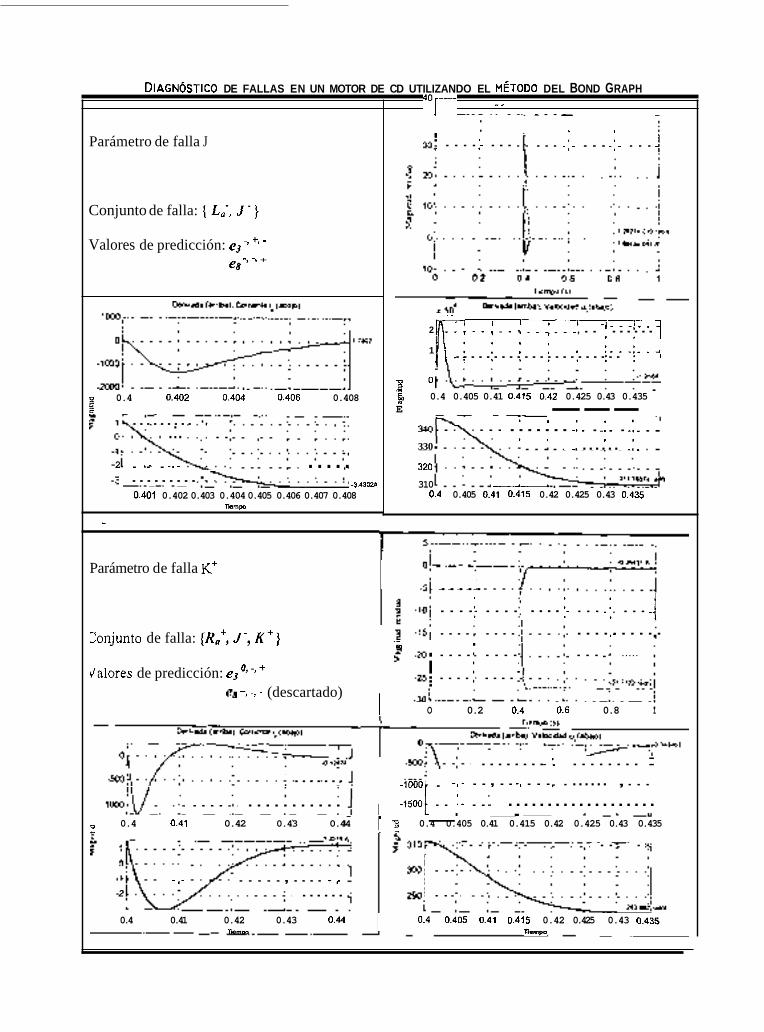
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
Parámetro de falla J
Conjunto de falla: { L , J - }
Valores de predicción: e3 -' +, es -, -3 +
0.4 0.402 0.404 0.406 0.408 E ......... .:. ..
-2 . . . <. .,. ..... ......... 0.401 0.402 0.403 0.404 0.405 0.406 0.407 0.408
.,,43m
TSrnF -
._ 40r--- . .....................
... .:. ... .:. . . . 4 : . ... 1. ...
2 ..,- . ,_ . __, .__ , /-/-/I-/ ., .. ...... 1 1~'. I : : I , . ' ' 1
, . ...................... . , . . , $ 0 .$ 0.4 0.405 0.41 0.415 0.42 0.425 0.43 0.435 E ---
I , . . ....... .,. . .,. . _,_ . , . ,
330 ., ...... .,. 320
310 d.
0.4 0.405 0.41 0.415 0.42 0.425 0.43 0.435
Parámetro de falla K' ..... .... ; .... .... ;. . . . . I . ... .I 1
lonjunto de falla: {R:, J, K + }
talores de predicción: e3""
+, -2 - (descartado)
.... .... .......... ,- E M .... .... ... .....
.... ....
O 0.2 0.4 0.6 0.8 1
.-
....... .... ...........
~ 0.4 0.41 0.42 0.43 0.44
........ .: ........ : -1OOOl . .,- .. , .. ., ... . ...... , ... -15001 .. ' - .. ................... _. _I-
3 0.4 0.405 0.41 0.415 0.42 0.425 0.43 0.435 - - .. . .
. . .,. ..... , .... - r
-2 ...... . . ..
0.4 0.41 0.42 0.43 0.44 0.4 0.405 0.41 0.415 0.42 0.425 0.43 0.435 remm ""Po
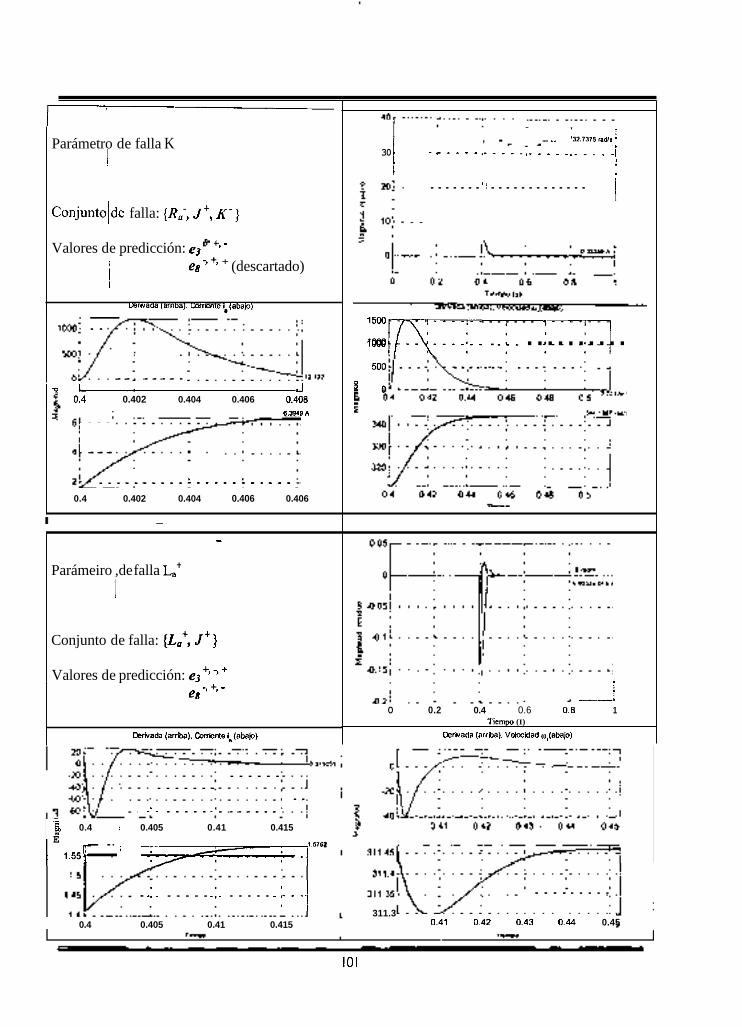
7 Parámetro de falla K
1
Conjuntolde falla: (%; J + , K }
Valores de predicción: e3 +, (descartado) ea -> +, +
L a r w a ~ (arribaJ. Uxr8"te ,.(abapI
. .
. . ..... v ' . J I 014 1 0.402 0.404 0.406 0.408
6.10(11*
...
.......... 1 . . . . . . . . . . .
0.4 0.402 0.404 0.406 0.406
- Parámeiro ,de falla L:
1
Conjunto de falla: {L:, J + ]
Valores de predicción: ej+'- '+ es -I +, -
DErhlada (arma). m n f e ie(aba*)
...... .......
.. :_ ..... :. ......
.. 5 0.4 : 0.405 0.41 0.415 E 15162 I 1 . 5 5 b ' i-77
. .:. ..... .:. . . . . . . I _ . .. : I 0.4 0.405 0.41 0.415
I i
30 1 , . .... ~ ;s1.7JIsmdll j -¡ - - . - ..............,....
j ..................... I !
I
........ ;?, 15mr7y7.. 1wO . .;. .......... 500 ... ....... ... ...
3 0
1 I . __I
O 0.2 0.4 0.6 0.8 1 Ti- (I)
Derhlada (arrba). V W d a d w,(abap)
.... .. . . . 311.3
0.41 0.42 0.43 0.44 0.45
101
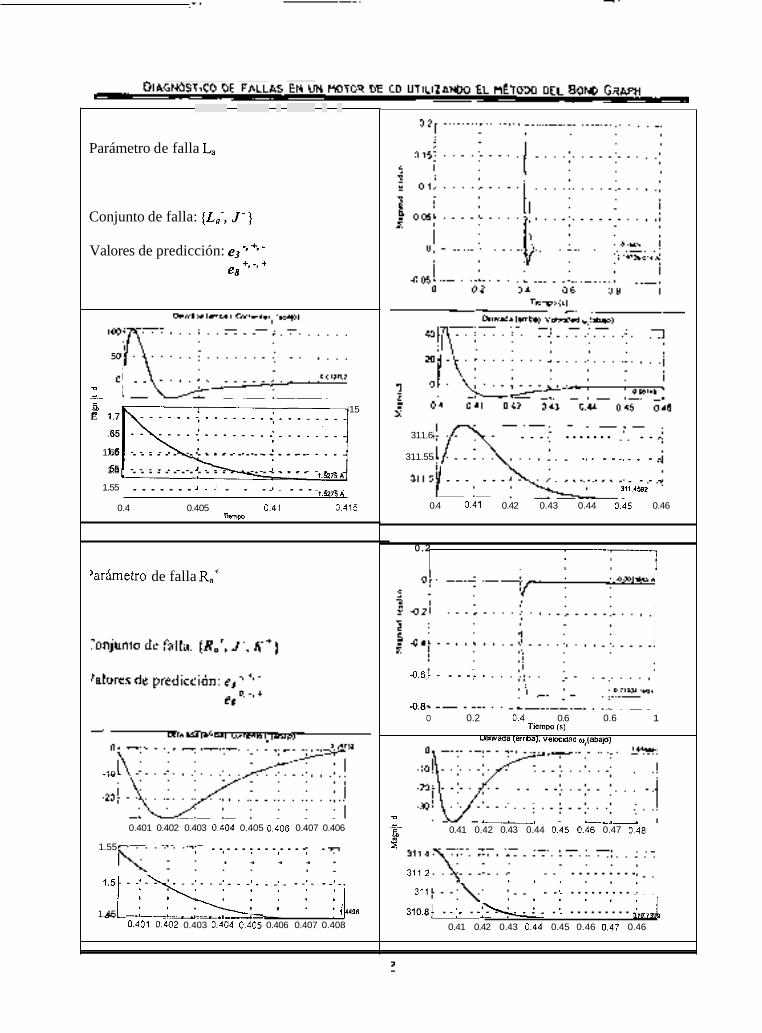
Parámetro de falla La
Conjunto de falla: {La-, J - }
Valores de predicción: e3 -' +, ~
es +, 5 +
50
.. .e
~ .. %. 0.4 0.405 0.41 0.415 E 1.7=/
1.65 ...................... 1.6 ......................
1.55 ....... 1 . . . . . .*. ... -,.*is* 0.4 0.405 0.41 0.415
r-
'arámetro de falla &'
-10.
0.401 0.402 0.403 0.404 0.405 0.406 0.407 0.406
1.55 ............. .. I . . , . . . . .
1.5[. .; .\. . .;. . .;.I . ,
, 4 4 8 8 . .
1.45 .-L-I.L.-..__-- 0.401 0.402 0.403 0.404 0.405 0.406 0.407 0.408
311.6 ... ....... _' _ ... 311.55 .,. .. _ ,_ . ..
... ... ....... ... Itl.4591
0.4 0.41 0.42 0.43 0.44 0.45 0.46
:---I 0.2
4.6.. ... ;.
0 . 6 O 0.2 0.4 0.6 0.6 1
ricmlio IS) wrraas (arma). VelDCmd w,(aDap,
. . .. ..
u_* ._I_, * "
0.41 0.42 0.43 0.44 0.45 0.46 0.47 0.46 .. 5 r
311.2 .. ......... 311 . . I ......... . . , . . ,
I . . . , . /
310.8} . .I. . .;*. . : ......... ;,rd 0.41 0.42 0.43 0.44 0.45 0.46 0.47 0.46
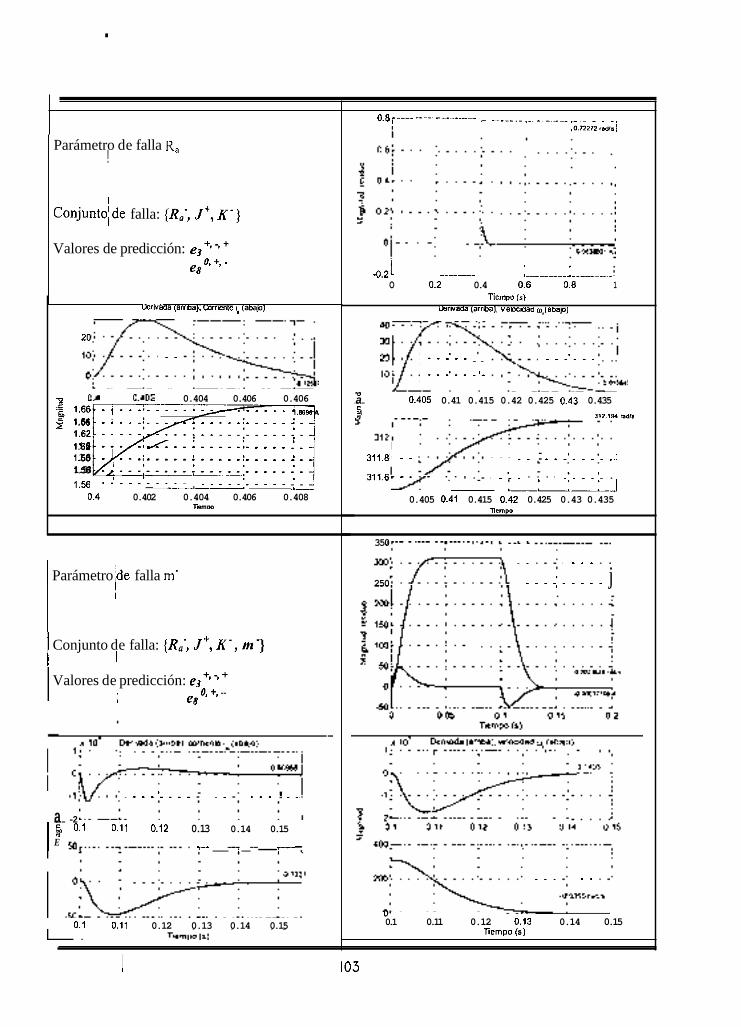
0.8 F.--. ............... ....... ,.~ ........ , ..... .a.,r2ni.a.;
Parámetro de falla R, !
I Conjuntoide falla: {R;, J', K }
Valores de predicción: ej+8-'f es o, +, -
WrNaOa ,arma,. Uirrimte ,, Wqoap)
20
..
0.404 0.406 0.406 .- c 1 I.rn$S* 3 1.66 1.64- .. . . . L . . . . i . . ........
1.62 ..................... :. 1.6 .!. _ , _ . ........ _ ,_ . ......
. . . . . 1. .... .'A 1.58 .......................
0.4 0.402 0.404 0.406 0.408 1.56 . .' . . .'. . . ..
_ _ _ I _ _
rrnm
I Parámetro de falla m'
I Conjunto de falla: {R;, J+, K , m-) 1
Valores de predicción: e3+'-'+ es o. +. -
........ .. ... ! ...
a .. -2 5 0 . 1 0 . i l 0.12 0.13 0.14 0.15 E - - - - - : - - - 7
0.1 0.11 0.12 0.13 0.14 0.15
4.21 ....... : ...... -..: .......... O 0.2 0.4 0.6 0.6 1
Tiem" (5)
UirNOLIB , o r r e q YeDcllaa wJsbapl
...... _' _ .......
...... .*. - .. a 0.405 0.41 0.415 0.42 0.425 0.43 0.435 n 3t2.184 Mb
311.8 .. . . : ......... ..I
311.6 .. .... .'. .... :-:--L.
0.405 0.41 0.415 0.42 0.425 0.43 0.435 n m p o
350
.. ... ... ;. .... j 250
... ..
0 0.1 0.11 0.12 0.13 0.14 0.15
Tlempo (9)
1 103
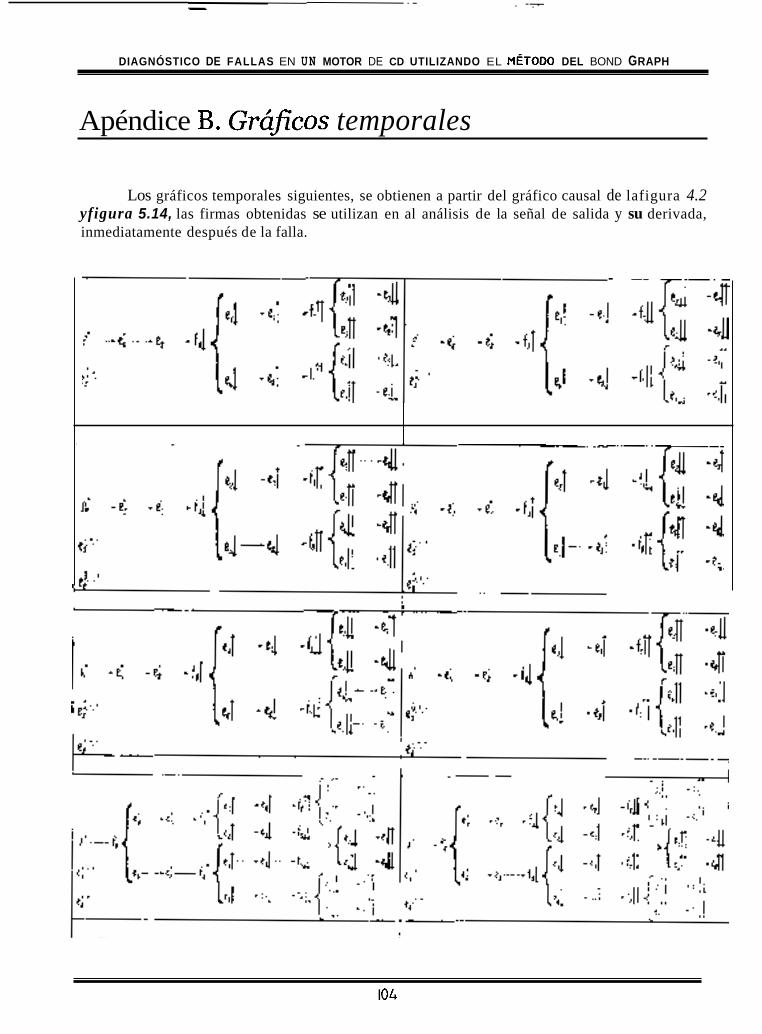
DIAGNÓSTICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
Apéndice B. Gráficos temporales
Los gráficos temporales siguientes, se obtienen a partir del gráfico causal de lafigura 4.2 yfigura 5.14, las firmas obtenidas se utilizan en al análisis de la señal de salida y su derivada, inmediatamente después de la falla.
I o4
I I
I I
I
105
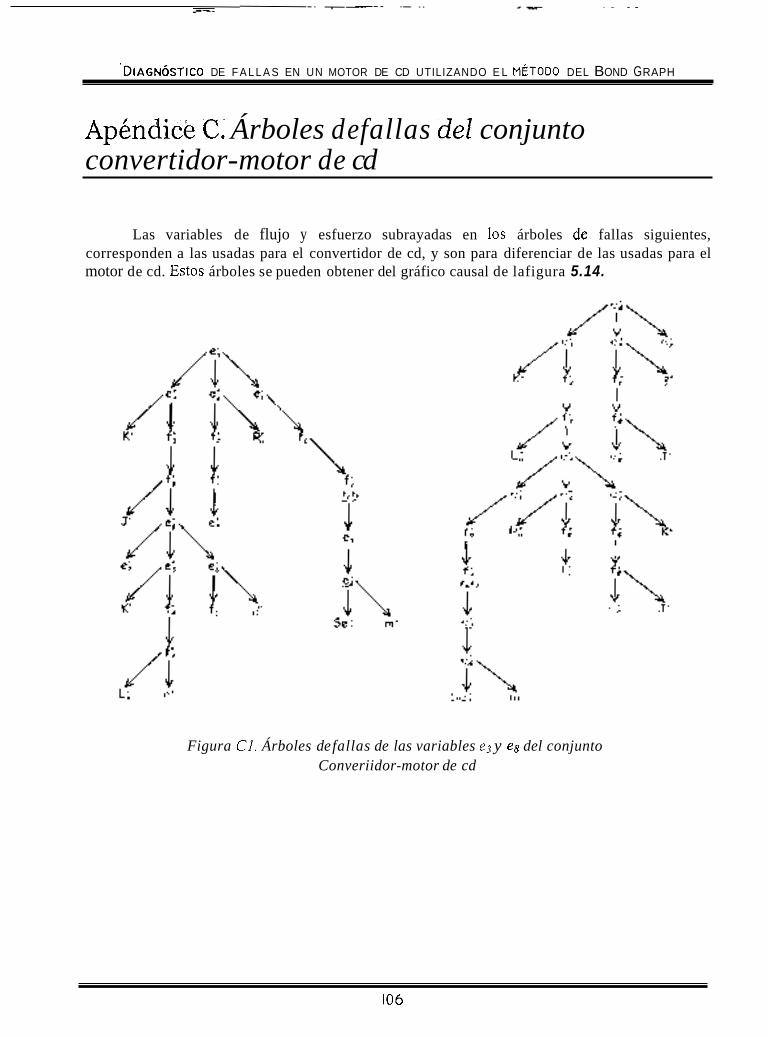
'DIAGNÓSTICO DE F A L L A S EN UN MOTOR DE CD UTILIZANDO E L MÉTODO DEL BOND GRAPH
Apéndice C. Árboles de fallas deZ conjunto convertidor-motor de cd
Las variables de flujo y esfuerzo subrayadas en los árboles de fallas siguientes, corresponden a las usadas para el convertidor de cd, y son para diferenciar de las usadas para el motor de cd. Estos árboles se pueden obtener del gráfico causal de lafigura 5.14.
Figura CI . Árboles de fallas de las variables e3 y e8 del conjunto Converiidor-motor de cd
106
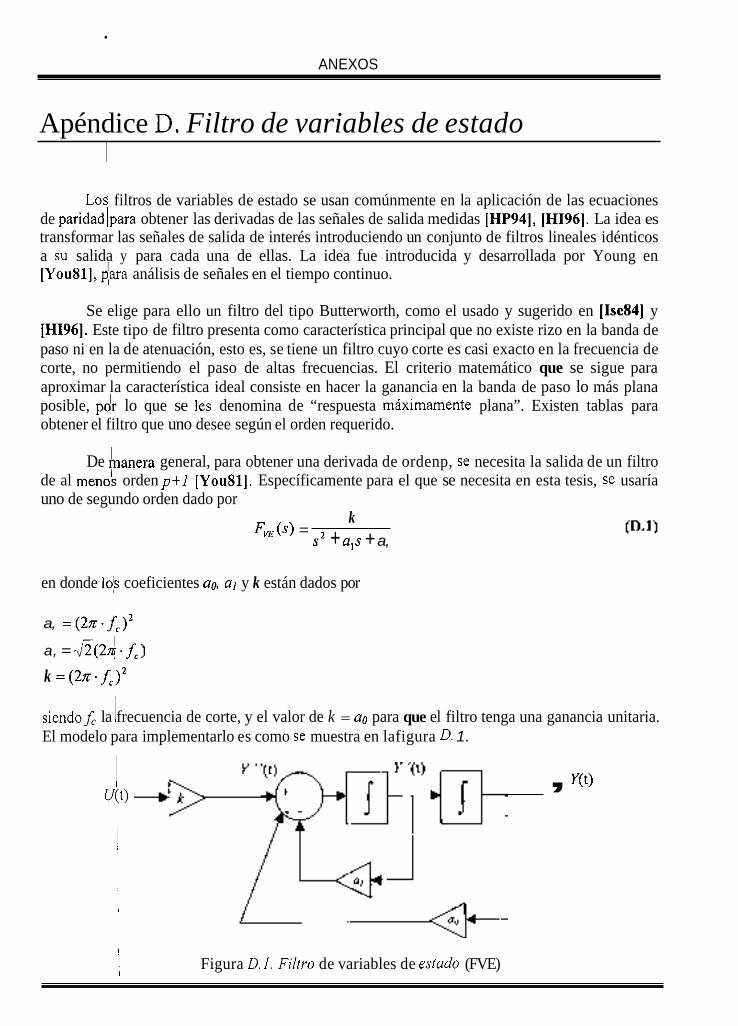
ANEXOS
Apéndice D. Filtro de variables de estado
Los filtros de variables de estado se usan comúnmente en la aplicación de las ecuaciones de paridadipara obtener las derivadas de las señales de salida medidas [HP94], [HI96]. La idea es transformar las señales de salida de interés introduciendo un conjunto de filtros lineales idénticos a su salida y para cada una de ellas. La idea fue introducida y desarrollada por Young en [YouSl], p,ara análisis de señales en el tiempo continuo. I
Se elige para ello un filtro del tipo Butterworth, como el usado y sugerido en [Ise84] y [HI96]. Este tipo de filtro presenta como característica principal que no existe rizo en la banda de paso ni en la de atenuación, esto es, se tiene un filtro cuyo corte es casi exacto en la frecuencia de corte, no permitiendo el paso de altas frecuencias. El criterio matemático que se sigue para aproximar la característica ideal consiste en hacer la ganancia en la banda de paso lo más plana posible, pdr lo que se les denomina de “respuesta máximamente plana”. Existen tablas para obtener el filtro que uno desee según el orden requerido.
De !nana, general, para obtener una derivada de ordenp, se necesita la salida de un filtro de al mends orden p + l [YouSl]. Específicamente para el que se necesita en esta tesis, se usaría uno de segundo orden dado por
k s2 + a,s + a,
F, (s) =
en donde i+ coeficientes an, a, y k están dados por
a, = ( 2 r . f C ) * a, = .JZ(~,!. I f c
k = (272. f C ) *
siendof, la 1 frecuencia de corte, y el valor de k = an para que el filtro tenga una ganancia unitaria. El modelo para implementarlo es como se muestra en lafigura D. 1.
1 , Ut) W)
1
I I Figura D. I . Filiro de variables de estado (FVE)
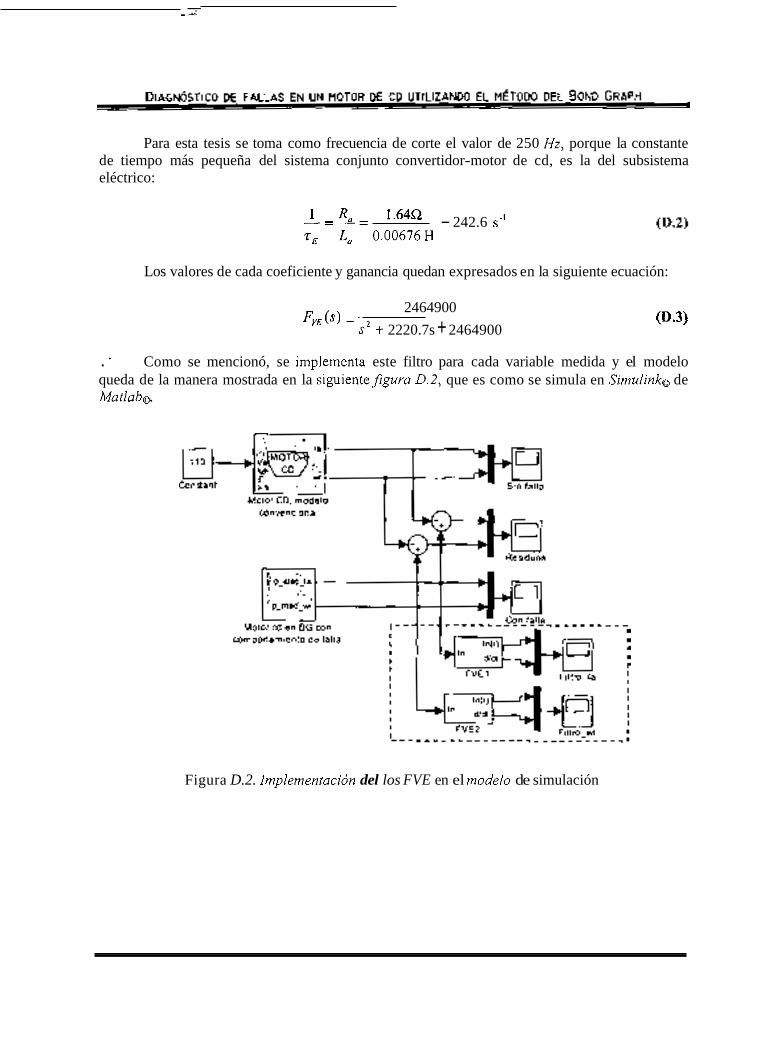
Para esta tesis se toma como frecuencia de corte el valor de 250 Hz, porque la constante de tiempo más pequeña del sistema conjunto convertidor-motor de cd, es la del subsistema eléctrico:
1 - Ro 1.64R T E 15" 0.00676H
~ - 242.6 s.' ---=
Los valores de cada coeficiente y ganancia quedan expresados en la siguiente ecuación:
2464900 sz + 2220.7s + 2464900
FE (SI - - (D.3)
. ' Como se mencionó, se implementa este filtro para cada variable medida y el modelo queda de la manera mostrada en la siguientejigura 0.2, que es como se simula en Simulinka de Matlab0
Figura D.2. lmplementación del los FVE en el modelo de simulación
ANEXOS
Apéndice E. Glosario 1
Camino calsal:
1 Causalidad:
I
Firmas (signaturas): I
Gráfico caisal:
I Modelo cualitativo:
Modelo cuhtitativo: I
Modelo de 1 diagnóstico:
Modelo en paralelo:
1 Residuo:
Síntoma de !falla:
La propagación de causalidad dada por la barra de causalidad en un modelo en BG, el flujo (o el esfuerzo) sigue una misma trayectoria, ya sea cerrada o desde la entrada hasta la salida.
Relaciones de causa-efecto (entrada-salida) mediante las cuales se relacionan las variables y los parámetros constituyentes de un sistema. Para un BG, si el flujo es la entrada, la salida es esfuerzo, y viceversa.
Indicador de síntoma de falla o valor de ésta visto en las variables medidas, que sirve para reconocer el efecto de la falla cualitativa o cuantitativamente.
Gráfico a manera de diagrama de flujo que muestra las relaciones causa efecto en forma gráfica, relacionando las variables y parámetros constituyentes del sistema, y la propagación de la energía a través de estos.
Relaciones dinámicas o estáticas entre las variables de un sistema y sus parámetros que describen su comportamiento a través de reglas de causalidad, o if-then. Se basan en conjuntos ordenados topológicamente.
Relaciones dinámicas o estáticas entre las variables de un sistema y sus parámetros ordenados matemáticamente para ser mesurables y cuantificables numéricamente.
Un modelo matemático diseñado para propósito de diagnóstico, ya sea dinámico o estático, que relaciona variables de entrada (síntomas) a variables de salida (fallas).
Modelo de referencia que tiene la misma estructura y la misma conducta del sistema: entradas, salidas y componentes.
Indicador de falla, basado en las ecuaciones del modelo y usado para propósitos de reconocimiento de falla.
Cambio en el comportamiento normal de una cantidad observable, que indica un fenómeno no deseado.
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
Referencias [ACGOO]
IAng951
[BBDOO]
[ BBJP95J
[BFGL93]
[Blu82]
[Bre89]
[BroOl]
Alexandm M., Combaste1 C., Gentil S . , “Diagnostic Decision Using Recurrent Neural Networks”, en: IFAC SAFEPROCESS 2000, vol. 1 , Budapest, Hungría, junio 2000, pp. 410-415. Ang Simón S., Power switching converters, Marcel Debe r Inc., Nueva York, 1995. Bouamama B. O., Busson F., Dauphin T. G., “Analysis of Structural Properties of Thermodynamic Bond Graph Models”, en: IFAC SAFEPROCESS 2000, vol. 2, Budapest, Hungría, junio 2000, pp. 1068-1076. Blanke M., B0gh S. A,, J0rgensen R. B., Patton R. J., “Fault Detection for a Diesel Engine Actuator- a Benchmark for FDi”, en: Control Engineering Practice, vol. 3, no. 12, 1995, pp. 1731-1740. Bidard C., Favert F., Goldztein S., Lanviere E., “Bond Graph and Variable Causality”, en: International Conference on System, Man and Cybernetics, IEEE, vol. 1, Le Tourquet, Francia, octubre 1993, pp. 270-275. Blundell A. J., Bond graphs for modeling engineering systems, John Wiley and Sons, Gran Bretaña, 1982. pp. 35-55. Breedveld P. C., Fundamentals of Bond Graphs, University of Twente, Press Twente, Paises Bajos, 1989. Broenink Jan F., Introduction to physical systems modeling with Bond Graphs, httu://Www.rt.el.utwente.nl/b~uauers/, 27/07/2001.
[CChSGT91] Catellani S., Champenois G.;Saadi J., Gabano J.D., Trigeassou J.C., “Monitoring of a Converter Machine System Using identification and Reference Models”, en: IMACS ‘91, vol. 3, Lille, Francia, 1991, PD. 586-591.
-
ICSCh9lj
[CVC99]
[ChaOO]
[ChP99]
[DR93]
IDSR89j
.. Catellani S., Saadi J., Champenois G., “Monitoring of a Static Converter Fed Machine Using Average Models”, en: IFAC SAFEPROCESS ‘91, vol. 2, Baden Baden, Alemania, septiembre 1991, pp. 205-210. Claudio A., Vela L. G., Cotorogea M., “Fault Diagnosis and Reconfiguration in a DCIDC Converter Using Fuzzy Logic”, en: SDEMPED ’99 del IEEE, 1999, pp. 199-203. Chapman S. J., Máquinas eléctricas, McGraw Hill, tercera edición, Colombia, 2000. Chen Jie, Patton R. J., Robust model-based fault diagnosis for dynamic systems, Kluwer Academic Publishers, Boston, E.U., 1999. Dauphin-Tanguy G., Rombaut Christian, “Why a Unique Causality in the Elementaiy Commutation Cell Bond Graph Model of a Power Electronics Converter”, en: International Conference on Systems, Man and Cybernetics, IEEE, vol. 1 , Le Tourquete, Francia, octubre 1993, pp. 257-263. Dauphin-Tanguy G., Sueur C., Rombaut Christian, “Bond graph Approach of Commutation Phenomena”, en: Symposium on Advanced Information Processes in Automatic Control-AIPAC ’89, IFAC, vol. 1, Nancy, Francia, julio 1989, pp. 297-301.
110
I
1 REFERENCIAS
[Fra91]1
I [Ger91]
(GS96j ‘ I
[HP94] I 1
[IB96]
! [IseOO]
[lse84] 1 [he941
11se97j 1 !
‘ [ISSOO]
(5593)
1 [KITA99]
[KKF193]
I 1
[KMR90]
(Kos911
lKSS941
[Kuo96] !
Frank, P. M., “Enhancement of Robustness in Observer-based Fault Detection”, en: IFAC SAFEPROCESS 91 I, vol. 1, Baden-Baden, Germany, septiembre 1991,
Gertler J . , ”Analytical Redundancy Methods in Fault Detection and Isolation”, en: IFAC SAFEPROCESS 91: vol.1, Baden-Baden, Alemania, septiembre, 1991, pp. 9-22. Gawthrop P., Smith L., Metamodelling: For Bond Graphs and dynamic systems, Prentice Hall, E. U. , 1996. Hofling Thomas, lsermann Rolf, “Fault Detection on Adaptive Panty Equations and Single-parameter Tracking“, en: Control Engineering Practice, vol. 4, 1996,
Hofling Thomas, Pfeufer Thomas, “Detection of Additive and Multiplicative Faults- parity Space vs. Parameter Estimation”, en: IFAC SAFEPROCESS ‘94, vol. 2, Espoo, Finlandia, junio 1994, pp. 539-544. Isemann Rolf, Ballé Peter, “Trends in the Application of Model Based Fault Detection and Diagnosis of Technical Process”, en: IFAC SAFEPROCESS ‘96, vol. N, San Francisco, EE.UU., junio 1996, pp.1-12. Isermann Rolf, “Diagnosis Methods for Electromechanical Components”, en: IEEE Industrial Electronics Society Newsletter, diciembre 2000, pp. 5-8. Isermann R., “Process Fault Detection Based on Modeling and Estimation Methods- A Survey’’, en: Automatica, Vol. 8, No. 20. 1984, pp. 387404. Isermann R., “Integration of Fault detection and Diagnosis Methods”, en: IFAC SAFEPROCESS ‘94, Espoo, Finlandia, junio 1994, pp. 597-612. Isermann Rolf, “Supervision, Fault-Detection and Fault-diagnosis Methods: An introduction”, en: Control Engineering Practice, vol. 5 , 1997, pp. 639-652 Isermann R., Schwarz R., Stolzl S., “Fault-tolerant Drive-by-wire Systems - Concepts and Realizations-“, en: IFAC SAFEPROCESS 2000, vol. 1, Budapest, Hungría, junio 2000, pp.1-15. Jia F., Jiang J., “Fault Diagnosis in DC Servo Systems: A Comparative Study of Three Fault Diagnosis Schemes”, en: International Conference on Fault Diagnosis, vol. 3, Toulouse, Francia, abril 1993, pp. 573-581. Kohda T., lnoe K., Takata S., Asama H., “Disturbance Analysis Using a System Bond-Graph Model”, en: Proceedings Annual Reliability and Maintainability Symposium, IEEE, 1999, pp. 358-364. Kohda T., Katsube H., Fujihara H., Inoue K., “identification of System Failure Causes Using Bond Graph Models”, en: International Conference on Systems, Man andCybernelics IEEE, vol. 5, Le Tourquet, Francia, octubre 1993, pp. 269- 274. Kamopp Dean C., Margolis Donald L., Rosenberg Ronald C., Systems dynamics: a unified approach, John Wiley and Sons, New York, 3rd ed., 1999. Kosow h i n g L., Máquinas eléctricas y transformadores, Prentice Hall, segunda edición, México, 199 1. Koscielny J.M., Sedziak D., Sikora A,, “The DIAG System for Fault Detection and Isolation in Industrial Process”, en: IFAC SAFEPROCESS 94: vol. 2, Espoo, Finlandia, junio 13-16, 1994, pp. 790-795. Kuo Benjamin C., Sistemas de control automático, Prentice Hall, séptima edición, México, 1996.
pp. 275-287.
’%..J
pp. 1361-1369.
’
- - * , I ,?. .- _-
DIAGN~STICO DE FALLAS EN UN MOTOR DE CD UTILIZANDO EL MÉTODO DEL BOND GRAPH
[Lei931
[LG941
[Li90]
[LW94)
[LZLYOOl
[MGOO]
(MB971
[MKB95]
IOga981
[Ola891
[OLNS98]
[Pa I8 7 1
[Pat941
[Pat971
[RasOl]
(Ras931
[RJSOO]
IRK831
ISH871
Leitch R., “Engineering Diagnosis: Matching Problems to Solutions”, en: International Conference on Fault Diagnosis, vol. 3, Tolouse, Francia, abril, 1993, pp. 837-844. Ljung L., Glad T., Modeling of dynamic systems, Prentice Hall, New York, 1994. Linkens D.A., “Bond Graphs for an improved Modeling Environment in the Life Sciences”, en: Bond Graphs in Control, IEE Colloquium on, 1990, pp. 1-4. Linkens D.A., Wang H., “Fault Diagnosis Based on a Qualitative Bond Graph Model, With Emphasis on Fault Localization”, en: Internaiional Conference on Control ‘94, vol. 2, 1994, pp. 1329 -1334. Liu Xiang-Qun, Zhang Hong-Yue, Liu Jun, Yang Jing, “Fault Detection and Diagnosis of ‘Permanent-Magnet dc Motor .Based on Parameter Estimation and Neural Network”, en: IEEE Transactions on Industrial Electronics, vol. 47, no. 5 , octubre 2000, pp. 1021-1030. Montmain J . , Gentil S., “Dynamic Causal Model Diagnostic Reasoning for Online Technical Process Supervision”, en: Automatica, vol. 36, No. 8, agosto 2000,pp. 1137-1152. Mostennan Pieter I., Biswas Gautam, “Monitoring, Prediction, and Fault Isolation in Dynamic Physical Systems”, en: Proceedings of AAAI-97, Providence, Rhode Island,julio 1997, pp. 100-105. Mosterman P. T., Kapadia R., Biswas G., “Using Bond Graphs for Diagnosis of Dynamic Physical Systems”, en: Sixih International Coni: on Principles of Diagnosis, Goslar, Alemania, octubre 1995, pp. 81-85. Ogata Katsuhiko, Ingeniería de control moderna, Prentice Hall, tercera edición, México, 1998. Olayiwola Oluwemimo Oyeleye, “Qualitative Modeling of Continuous Chemical Processes and Applications to Fault Diagnosis”, Tesis doctoral, Massachusetts institute of Technology (MIT), enero1989. Ortega R., Lona A,, Nicklasson P. J., Sira-Ramírez H., Passivity-based control of Euler-Lagrange Systems, Springer-Verlag, Berlín, 1998. Palowitch B.L., “Fault Diagnosis of Process Plants Using Causal Models”, Tesis doctoral, Massachusetts Institute of Technology (MlT), agosto 1987. Patton R. J., “Robust Model-Based Fault Diagnosis: The Estate of the Art”, en: IFAC SAFEPROCESS ‘94, vol. 1, Espoo, Finlandia, 1994, pp. 1-24. Patton R. J., “Fault-tolerant Control: The 1997 Situation”, en: IFAC SAFEPROCESS ’97, vol. 2, Kingston Upon Hull, UK, 1997, pp. 1033-1055. Rashid H. Muhammad et al., Power electronics (handbook), Academic Press, Canadá, 2001. Rashid H. Muhammad, Electrónica de potencia, circuitos, dispositivos y aplicaciones, Prentice Hall, tercera edición, México, 1993. Rakar Andrej, Juricic D., Strmcnik S., “A Concept of Teaching Model-Based Condition Monitoring”, en: IFAC SAFEPROCESS 2000, vol. 1, Budapest, Hunc’a, junio 2000, pp. 786-791. Rosenberg R.C., Karnopp D., Introduction to physical systems dynamics, McGraw Hill, New York, 1983. Shepherd W., Hulley L. N., Power electronics and motor control, Cambridge University Press, Gran Bretaña, 1987.
112
[Tho901
[van001
IVGC951
IVJW I [VMC97]
[WehOL] i
[ZTDKOO]
I
i
Thoma J. U., Simulation by Bondgraphs, introduction to a graphical method, Springer-Verlag, Berlín, 1990. van Schick Dirk, “Conceptual System Draft for Safe Process: Relations and ~~. ~~~
Definitions”, en: IFAC SAFEPRÓCESS 2000, vol. 1, Budapest, Hungria, junio 2000, pp. 792-797. Verde~C., Garcia M., Carrera M. R., “Fault Location in a Converter-AC Motor System”, en: ECC ’95, vol. 1, Roma, Italia, septiembre 5-8 1995, pp. 372-377. Verge M., Jaume D., “Fault Detection and Bond Graph Modeling”, en: IFAC SAFEPROCESS ‘94, vol. 2, Espoo, Finlandia, junio 1994, pp. 748-753. Vadam O., Montmain J., Cassar J. C., “Fault Detection Using Parallel Simulations”, en: IFAC SAFEPROCESS 97, vol. 1, Kingston Upon Hull, UK, 1997, pp. 121-126. “About Bond ’ Graphs, Simulation and Control”, httn://www.bonderaphs.com/saiidc.html#fault, 25/07/200 1 Wellstead P. E., Physical system modeling, Academic Press inc., New York, E. U., 1979. Williams B. W., Power electronics, devices, drivers, applications and passive components, McGraw Hill, Segunda edición, Nueva York, 1998. Young P. C., “Parameter Estimation for Continuous Time Models- a Survey”, en: Automatica, No. 17, 1981, pp. 23-39. Zanzouri N., Tagina M., Dauphin T. G., Ksouri M., “Hybrid Systems Monitoring by a Bond Graph Approach”, en: IFAC SAFEPROCESS 2000, vol. 2, Budapest, Hungría, junio 2000, pp. 1062-1067.
1 8 2 - 0 9 9 3