5° tsu
DESCRIPTION
MecatronicaTRANSCRIPT
UNIVERSIDAD TECNOLÓGICA DE PUEBLA
INFORME DE INTEGRADORA
Persianas Automáticas
TÉCNICO SUPERIOR UNIVERSITARIO EN MACARRÓNICA ÁREA DE
AUTOMATIZACIÓN
Presentan:
JULIO CÉSAR VELASCO SÁNCHEZ
ERICK CANDIA CABRERA
IRVIN DANIEL VAZQUEZ CRUZ
Armando
Willis
Puebla, Puebla México
2014
ÍNDICE
CAPITULO I INTRODUCCION
Planteamiento del problema
Cronograma
Objetivo
Justificación
Alcances
Limitaciones
CAPÍTULO II CIRCUITO DE LAS PERSIANAS
Descripción de las persianas automáticas
Aplicaciones
Especificaciones técnicas
Especificaciones de los componentes
Normatividad para su operación f
CAPITULO III: MEMORIA TECNICA
Planos
Esquemas
Diagramas y cálculos
Simulación
Normas de seguridad
CAPITULO IV:COSTES, COMERCIALIZACION Y/O MANTENIMIENTO
determinación de costos
Producción, venta
imagen comercial
CAPITULO V Otras aplicaciones
Conclusiones
Bibliografía
Anexos
Capítulo I INTRODUCCION
INTRODUCCION
Desde el principio de los tiempos, el hombre ha deseado crear vida artificial. Los
hombres creaban autómatas como un pasatiempo. Los materiales que se
utilizaban estaban al alcance de todos.
Estos primeros autómatas utilizaban, principalmente, la fuerza bruta para poder
realizar sus movimientos.
Por estos motivos nuestro proyecto está enfocado en las empresas, oficinas,
casas, etc. para la innovación de unas persianas automáticas y asi usarlas de
manera fácil y confortada al usuario.

PLANTEAMIENTO DEL PROBLEMA
Los hombres creaban autómatas como un pasatiempo. Los materiales que se
utilizaban estaban al alcance de todos y podían hacerse de uno cuando ellos
quisieran.
Debido a la necesidad de una fuente de luz natural (el sol) en las empresas,
oficinas o casas, ya que con esto se puede trabajar más de manera fácil y rápida,
pero no siempre se ajusta a lo que se necesita.
El presente proyecto pretende brindar un sistema de unas persianas automáticas
el cual nos permitirá abrirlas y cerrarlas automáticamente conforma a la luz (entre
más luz más se abrirán y menos luz se irán cerrando), por este motivo les
daremos a conocer los componentes que lo conforman para posteriormente
mostrar a detalle la composición, ensamblado y funcionamiento de nuestro
proyecto,.
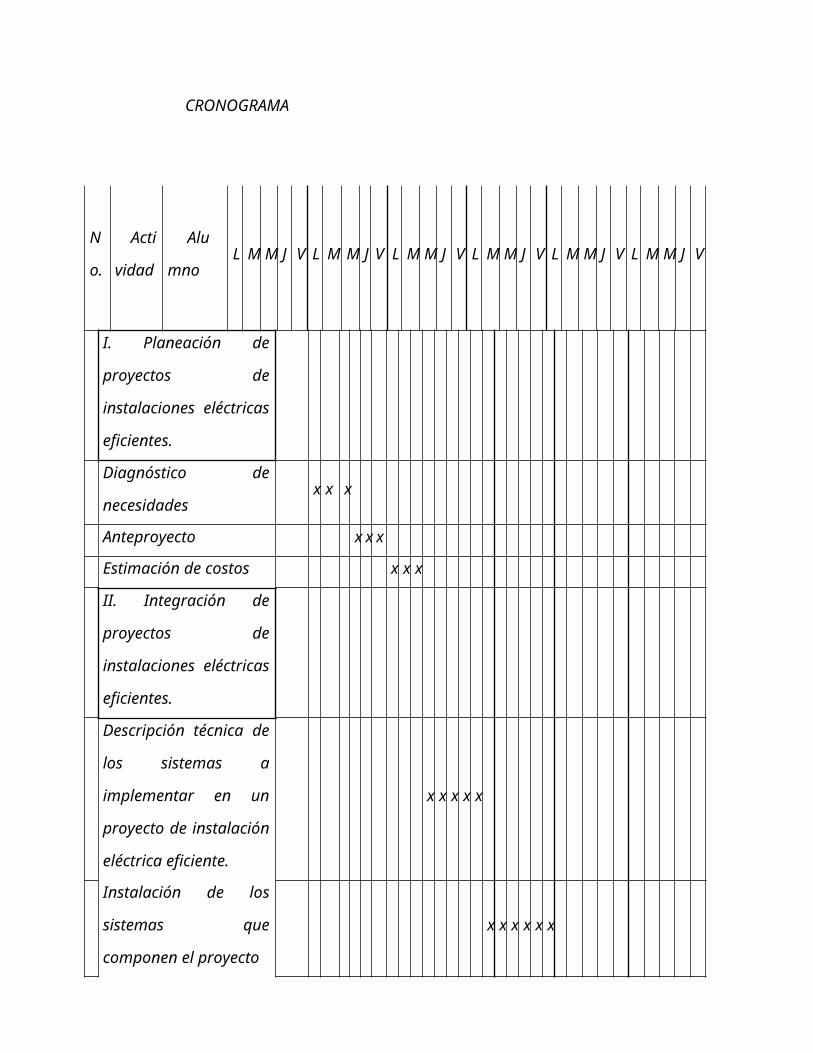
CRONOGRAMA
N
o.
Acti
vidad
Alu
mno L M M J V L M M J V L M M J V L M M J V L M M J V L M M J V
I. Planeación de
proyectos de
instalaciones eléctricas
eficientes.
Diagnóstico de
necesidades x x x
Anteproyecto x x x
Estimación de costos x x x
II. Integración de
proyectos de
instalaciones eléctricas
eficientes.
Descripción técnica de
los sistemas a
implementar en un
proyecto de instalación
eléctrica eficiente.
x x x x x
Instalación de los
sistemas que
componen el proyecto
x x x x x x
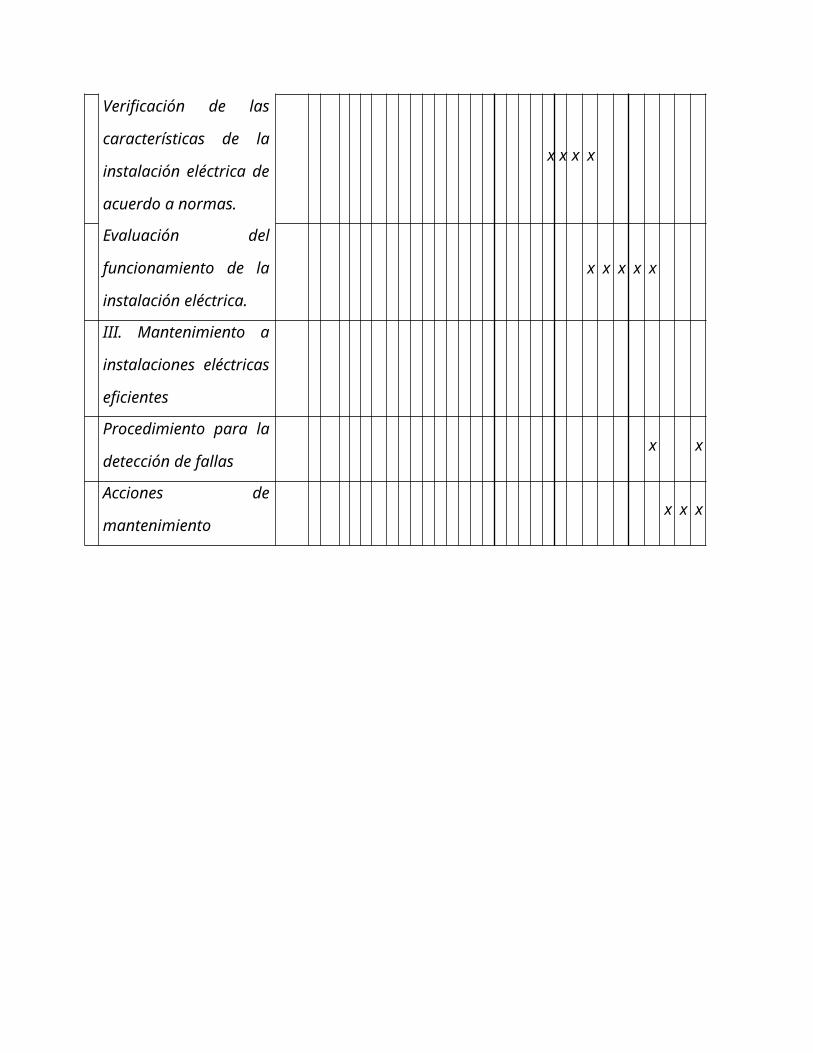
Verificación de las
características de la
instalación eléctrica de
acuerdo a normas.
x x x x
Evaluación del x x x x x
funcionamiento de la
instalación eléctrica.
III. Mantenimiento a
instalaciones eléctricas
eficientes
Procedimiento para la
detección de fallas x x
Acciones de
mantenimiento x x x
OBJETIVO
Hacer un sistemas capaz de abrir y cerrar unas persianas de manera automática
sin la necesidad de un operario, solo con ajustarlo solo una vez se tendrá ya esté
en funcionamiento.
El costo de este producto será muy fácil y accesible ya que sus materiales no son
caros y su costo no será muy exagerado como en algunos casos seda en algunos
productos.
Para llevar a cabo este proyecto, nos basamos en la investigación de artículos, y
documentación de electrónica ya que propician información para la construcción
de las persianas automáticas
JUSTIFICACION
Nuestro proyecto está basado en las ventanas de los usuarios para así facilitar el
abrir y cerrar las persianas sin necesidad de estar manejándolas.
Por este motivo crearemos unas persianas que aparte de ser fácil de usar sea
capaz de manipularse por si solo lo cual será muy factible
Nuestro proyecto aparte de beneficiar a las empresas, beneficiara a las oficinas,
casas o cualquier lugar donde se pueda tener una ventana y ajustarlas a lo
deseado. Y al mismo tiempo se evitara que el usuario se tenga que parar para
ajustar sus persianas de acuerdo a la luz.
Alcances
• Industrial.
• Negocios pequeños
• Oficinas
• Casas
• Globales
Limitaciones
• No usar en lugares muy húmedos
• No usar persianas distintas a las indicadas (kg)
• No usarlas indebidamente
CAPÍTULO II circuito rastreador de luz
SISTEMA ELÈCTRICO-ELECTRONICO
ALIMENTACIÓN.
Proporcionada por baterías las cuáles serán las necesarias para el movimiento de
los elementos.
CARGA.
El sistemas de cargar será mediante pilas y serán cambiadas cuando estas no
tengan más batería
CONTROL.
Circuito electrónico que por medio de un arduino efectuará todas las operaciones
para las cuales esta diseñado este sistema
ABASTECIMIENTO.
Se abastecerá de la corriente que requiere el motor, Control, y dispositivos
indicadores control y carga.
MECANISMO.
DIRECCIÓN.
la dirección es a los costados accionada por el giro del eje de rotación de un
servomotor y así mover las persianas y abrirlas y un sentido contrario para invertir
el giro y cerrarlas
TRANSMISION:
Un servomotor colocado a un costado, dará movimiento de desplazamiento al
sistema. Mismo servomotor, por medio de un ángulo de desplazamiento de forma
horizontal se moverán las persianas
FACTORES A CONSIDERAR
Los factores que se tomaran en cuenta para el desarrollo deberán cumplir con las
siguientes requerimientos:
•Capacidad de peso de las persianas máxima de 1kg basado a escala.
•No exceder medidas de 120x80cm.
La capacidad del lugar donde se encontrara sera diferente, es por ello que el
diseño no deberá exceder las medidas mencionadas.
•Control de velocidad máxima de 1 m/s.
• Manejo flexible. El manejo debe ser fácil y sencillo para los operadores al
ponerlo en funcionamiento.
•Cumplir con las normas de manejo y almacenamiento de materiales.
•Sistema Automático.
El sistema que proponemos diseñar se manipulara de manera automática,
tomando en cuenta que el operador lo instalara de acuerdo a las instrucciones
dichas
CONSIDERACIONES PARA EL DESARROLLO DEL SISTEMA.
La implementación del sistema contempla factores los cuales deben cumplir con
necesidades especificas por lo tanto se podrá dar solución.
•Suministro.
La alimentación para el accionamiento de los elementos que componen el sistema
lo realizarán baterías para disminuir costos y optimizar el funcionamiento.
MANIPULACIÒN DE MATERIALES.
El manipular materiales es recoger y depositar, trasladar en un plano horizontal o
vertical y por cualquier medio, materiales o productos de cualquier clase. Por otro
lado, cuando nos referimos a dispositivos automáticos es crear un sistemas con
dichos dispositivos y así tener una automatización mas eficaz
VENTAJAS
•Silencioso: Los dispositivos que utilizan son los servomotores eléctricos
•Aceleración: Para los motores de combustión se necesitan dos pedales para regir
la aceleración en cambio para los eléctricos solo se necesita un pedal pudiendo
regular el avance suavemente.
Los sistemas de combustión generan contaminación y es posible que puedan
dañar la atmósfera de trabajo cuando las áreas son cerradas en cambio los
eléctricos no generan contaminación.
•Tiempo inoperante: los sistemas eléctricos tienen un menor tiempo inoperante el
cual es aproximadamente de 3% comparado con el 12% de los sistemas de
combustión interna.
Resistencia variable
Conocida la dependencia de la resistencia eléctrica en función de los parámetros geométricos, es fácil comprender cómo se puede construir un dispositivo que muestre una resistencia variable.
En la figura se muestra una barra de un material conductor, que tiene forma de barra rígida AC sobre la que se apoya un cursor apoyado en B.
La resistencia eléctrica que observa el circuito es la que viene dada por la longitud de la barra desde A a B.
En los casos extremos en que:
A coincide con B. La resistencia será cero. B coincide con C. La resistencia será máxima.
En general el valor de la resistencia se podría calcular con la siguiente fórmula.
De donde se deduce que la resistencia cumplirá
Las resistencias variables con contacto deslizante se denominan potenciómetros y tienen el siguiente símbolo.
Resistencias
Son componentes electrónicos que tienen la propiedad de presentar oposición al paso de la corriente eléctrica. La unidad en la que mide esta característica es el Ohmio y se representa con la letra griega Omega (W). Los símbolos eléctricos que las representan son:
Diodo led
El LED (Light-Emitting Diode: Diodo Emisor de Luz), es un dispositivo semiconductor que emite luz incoherente de espectro reducido cuando se polariza de forma directa la unión PN en la cual circula por él una corriente eléctrica . Este fenómeno es una forma de electroluminiscencia, el LED es un tipo especial de diodo que trabaja como un diodo común, pero que al ser atravesado por la corriente eléctrica, emite luz . Este dispositivo semiconductor está comúnmente encapsulado en una cubierta de plástico de mayor resistencia que las de vidrio que usualmente se emplean en las lámparas incandescentes. Aunque el plástico puede estar coloreado, es sólo por razones estéticas, ya que ello no influye en el color de la luz emitida. Usualmente un LED es una fuente de luz compuesta con diferentes partes, razón por la cual el patrón de intensidad de la luz emitida puede ser bastante complejo.
Para obtener una buena intensidad luminosa debe escogerse bien la corriente que atraviesa el LED y evitar que este se pueda dañar; para ello, hay que tener en cuenta que el voltaje de operación va desde 1,8 hasta 3,8 voltios aproximadamente (lo que está relacionado con el material de fabricación y el color de la luz que emite) y la gama de intensidades que debe circular por él varía según su aplicación. Los Valores típicos de corriente directa de polarización de un LED están comprendidos entre los 10 y 20 miliamperios (mA) en los diodos de color rojo y de entre los 20 y 40 miliamperios (mA) para los otros LED. Los diodos LED tienen enormes ventajas sobre las lámparas indicadoras comunes, como su bajo consumo de energía, su mantenimiento casi nulo y con una vida aproximada de 100,000 horas. Para la protección del LED en caso haya picos inesperados que puedan dañarlo.
Se coloca en paralelo y en sentido opuesto un diodo de silicio comúnEn general, los LED suelen tener mejor eficiencia cuanto menor es la corriente que circula por ellos, con lo cual, en su operación de forma optimizada, se suele buscar un compromiso entre la intensidad luminosa que producen (mayor cuanto más grande es la intensidad que circula por ellos) y la eficiencia (mayor cuanto menor es la intensidad que circula por ellos).
Símbolo del LEDESTRUCTURA DEL LED
Un LDR (Light Dependent Resistor) es una resistencia que varia su valor en función de la luz recibida, cuanta más luz recibe, menor es su resistencia.
Sensor LDR
Un LDR (Light Dependent Resistor) es una resistencia que varia su valor en función de la luz recibida, cuanta más luz recibe, menor es su resistencia.
Un LDR está fabricado con un semiconductor de alta resistencia como puede ser el sulfuro de cadmio. Si la luz que incide en el dispositivo es de alta frecuencia, los fotones son absorbidos por la elasticidad del semiconductor dando a los electrones la suficiente energía para saltar la banda de conducción. El electrón libre que resulta (y su hueco asociado) conduce electricidad, de tal modo que disminuye la resistencia.
Las células de sulfuro del cadmio se basan en la capacidad del cadmio de variar su resistencia según la cantidad de luz que incide la célula. Cuanto más luz incide, más baja es la resistencia. Las células son también capaces de reaccionar a una amplia gama de frecuencias, incluyendo infrarrojo (IR), luz visible, y ultravioleta (UV).

El rango de resistencia que nos puede dar un LDR desde la total oscuridad hasta la plena luz, nos va a variar de un modelo a otro, pero en general oscilan entre unos 50Ω a 1000Ω cuando están completamente iluminadas y entre 50KΩ y varios MΩ cuando está completamente a oscuras.
Una de las cosas a tener en cuenta es el tiempo que tarda en variar la resistencia cuando cambia la luz que recibe, hay modelos con diferentes tiempo de respuestas, además no varia de igual manera de luz a oscuridad, que de oscuridad a luz.
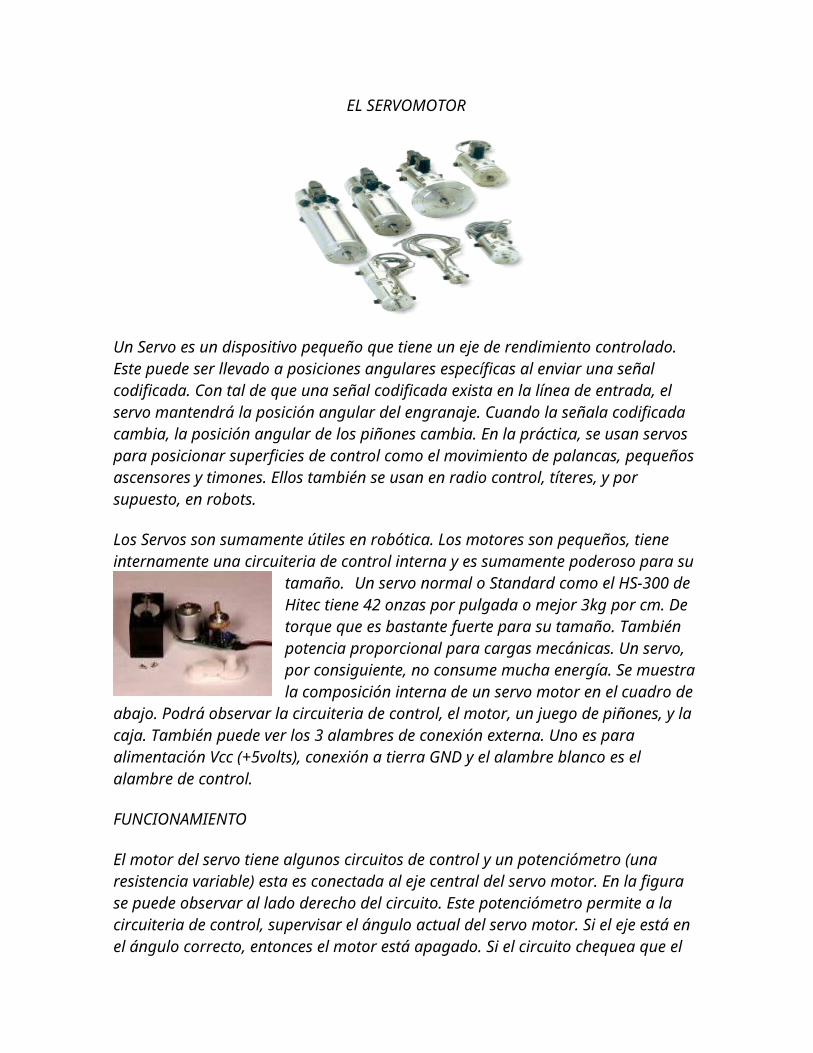
EL SERVOMOTOR

Un Servo es un dispositivo pequeño que tiene un eje de rendimiento controlado. Este puede ser llevado a posiciones angulares específicas al enviar una señal codificada. Con tal de que una señal codificada exista en la línea de entrada, el servo mantendrá la posición angular del engranaje. Cuando la señala codificada cambia, la posición angular de los piñones cambia. En la práctica, se usan servos para posicionar superficies de control como el movimiento de palancas, pequeños ascensores y timones. Ellos también se usan en radio control, títeres, y por supuesto, en robots.
Los Servos son sumamente útiles en robótica. Los motores son pequeños, tiene internamente una circuiteria de control interna y es sumamente poderoso para su
tamaño. Un servo normal o Standard como el HS-300 de Hitec tiene 42 onzas por pulgada o mejor 3kg por cm. De torque que es bastante fuerte para su tamaño. También potencia proporcional para cargas mecánicas. Un servo, por consiguiente, no consume mucha energía. Se muestra la composición interna de un servo motor en el cuadro de abajo. Podrá observar la circuiteria de control, el motor, un
juego de piñones, y la caja. También puede ver los 3 alambres de conexión externa. Uno es para alimentación Vcc (+5volts), conexión a tierra GND y el alambre blanco es el alambre de control.
FUNCIONAMIENTO
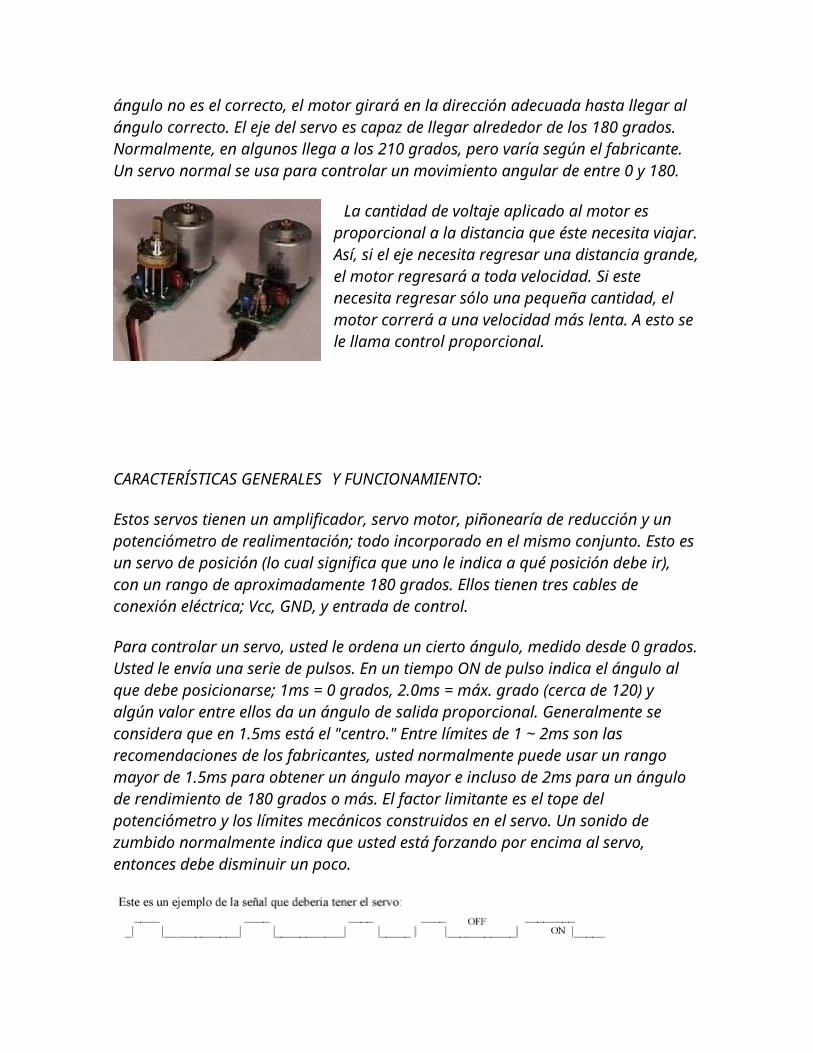
El motor del servo tiene algunos circuitos de control y un potenciómetro (una resistencia variable) esta es conectada al eje central del servo motor. En la figura se puede observar al lado derecho del circuito. Este potenciómetro permite a la circuiteria de control, supervisar el ángulo actual del servo motor. Si el eje está en el ángulo correcto, entonces el motor está apagado. Si el circuito chequea que el ángulo no es el correcto, el motor girará en la dirección adecuada hasta llegar al ángulo correcto. El eje del servo es capaz de llegar alrededor de los 180 grados. Normalmente, en algunos llega a los 210 grados, pero varía según el fabricante.
Un servo normal se usa para controlar un movimiento angular de entre 0 y 180.
La cantidad de voltaje aplicado al motor es proporcional a la distancia que éste necesita viajar.
Así, si el eje necesita regresar una distancia grande, el motor regresará a toda velocidad. Si este necesita regresar sólo una pequeña cantidad, el motor correrá a una velocidad más lenta. A esto se le llama control proporcional.
CARACTERÍSTICAS GENERALES Y FUNCIONAMIENTO:
Estos servos tienen un amplificador, servo motor, piñonearía de reducción y un potenciómetro de realimentación; todo incorporado en el mismo conjunto. Esto es un servo de posición (lo cual significa que uno le indica a qué posición debe ir), con un rango de aproximadamente 180 grados. Ellos tienen tres cables de conexión eléctrica; Vcc, GND, y entrada de control.
Para controlar un servo, usted le ordena un cierto ángulo, medido desde 0 grados. Usted le envía una serie de pulsos. En un tiempo ON de pulso indica el ángulo al que debe posicionarse; 1ms = 0 grados, 2.0ms = máx. grado (cerca de 120) y algún valor entre ellos da un ángulo de salida proporcional. Generalmente se considera que en 1.5ms está el "centro." Entre límites de 1 ~ 2ms son las recomendaciones de los fabricantes, usted normalmente puede usar un rango mayor de 1.5ms para obtener un ángulo mayor e incluso de 2ms para un ángulo de rendimiento de 180 grados o más. El factor limitante es el tope del potenciómetro y los límites mecánicos construidos en el servo. Un sonido de zumbido normalmente indica que usted está forzando por encima al servo, entonces debe disminuir un poco.
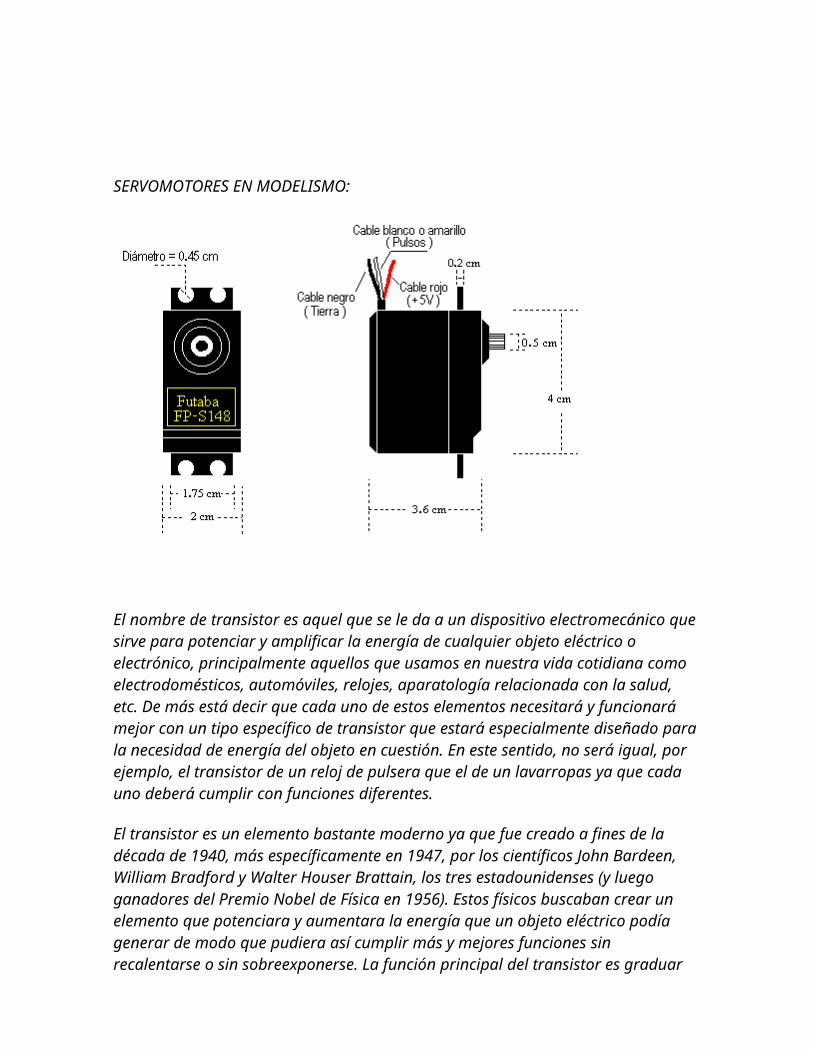
SERVOMOTORES EN MODELISMO:
El nombre de transistor es aquel que se le da a un dispositivo electromecánico que sirve para potenciar y amplificar la energía de cualquier objeto eléctrico o electrónico, principalmente aquellos que usamos en nuestra vida cotidiana como electrodomésticos, automóviles, relojes, aparatología relacionada con la salud, etc. De más está decir que cada uno de estos elementos necesitará y funcionará mejor con un tipo específico de transistor que estará especialmente diseñado para la necesidad de energía del objeto en cuestión. En este sentido, no será igual, por ejemplo, el transistor de un reloj de pulsera que el de un lavarropas ya que cada uno deberá cumplir con funciones diferentes.
El transistor es un elemento bastante moderno ya que fue creado a fines de la década de 1940, más específicamente en 1947, por los científicos John Bardeen, William Bradford y Walter Houser Brattain, los tres estadounidenses (y luego ganadores del Premio Nobel de Física en 1956). Estos físicos buscaban crear un elemento que potenciara y aumentara la energía que un objeto eléctrico podía generar de modo que pudiera así cumplir más y mejores funciones sin recalentarse o sin sobreexponerse. La función principal del transistor es graduar la energía según las necesidades, es decir, aumentarla en caso de que sea necesario como también disminuirla para evitar sobrecalentamiento.
Esta graduación de la energía se logra a partir de la conducción de la misma a través de las terminales del transistor, responsables de cambiarla y adecuarla a lo deseado. De este modo, con un transistor es mucho más fácil por ejemplo recibir una determinada carga eléctrica y potenciarla o amplificarla luego de que la misma pasa a través de las terminales y se inyecta en el objeto en cuestión.
Hoy en día, el transistor tiene una importancia crucial en lo que hace al funcionamiento de casi todos los elementos técnológicos que utilizamos ya que permite que los mismos cumplan sus funciones de la mejor manera posible. Así, a partir del surgimiento de transistores cada vez más evolucionados y perfectos, la tecnología también pudo progresivamente perfeccionarse y construirse entonces objetos cada vez más detallados y pequeños o gigantescos cuya energía está correctamente adecuada.
Definicion
ARDUINO
Arduino es una plataforma de hardware libre, basada en una placa con un microcontrolador y un entorno de desarrollo, diseñada para facilitar el uso de la electrónica en proyectos multidisciplinares.
Arduino es una plataforma de hardware y software de código abierto, basada en una sencilla placa con entradas y salidas, analógicas y digitales, en un entorno de desarrollo que está basado en el lenguaje de programación Processing. Es decir, una plataforma de código abierto para prototipos electrónicos.Al ser open source, tanto su diseño como su distribución, puede utilizarse libremente para el desarrollo de cualquier tipo de proyecto sin necesidad de licencia.El proyecto fue concebido en Italia en el año 2005 por el zaragozano David Cuartielles, ingeniero electrónico y docente de la Universidad de Mälmo (Suecia) y Massimo Banzi, italiano, diseñador y desarrollador Web.
Arduino UNO
La Arduino Uno posee:
14 entrada/salida digitales, de los cuales 6 pueden se usados como salidas PWM
Posee 6 entradas analógicas Los pin 0 y 1 pueden funcionar como RX y TX serial. Un oscilador de crystal de 16 MHz Conector USB Un jack de poder Una conector ICSP Botón de Reset
La Arduino UNO posee todo lo que se necesita para manejar el controlador, simplemente se conecta a un computador por medio del cable USB o se puede alimentar utilizando una batería o un adaptador AC-DC. Si se conecta por USB, la alimentación externa no es necesaria.
Para programar sólo necesita el IDE de Arduino, que se encuentra en la sección de descargas en el sitio web de www.arduino.cc
Algunas características son:
Microcontroller ATmega328Operating Voltage 5VInput Voltage (recommended) 7-12 VInput Voltage (limits) 6-20 VDigital I/O Pins 14 (of which 6 provide PWM output)Analog Input Pins 6DC Current per I/O Pin 40 mADC Current for 3.3V Pin 50 mA
Flash Memory32 KB (of which 0.5 KB used by bootloader)
SRAM 2 KBEEPROM 1 KBClock Speed 16 MHzLas Entradas analógicas son de 10 bits, por lo que entregan valores entre 0 y 1023. El rango de voltaje está dado entre 0 y 5 volts, pero utilizando el pin AREF disponible, este rengo se puede variar a algún otro deseado.

Capitulo III.- memoria técnica
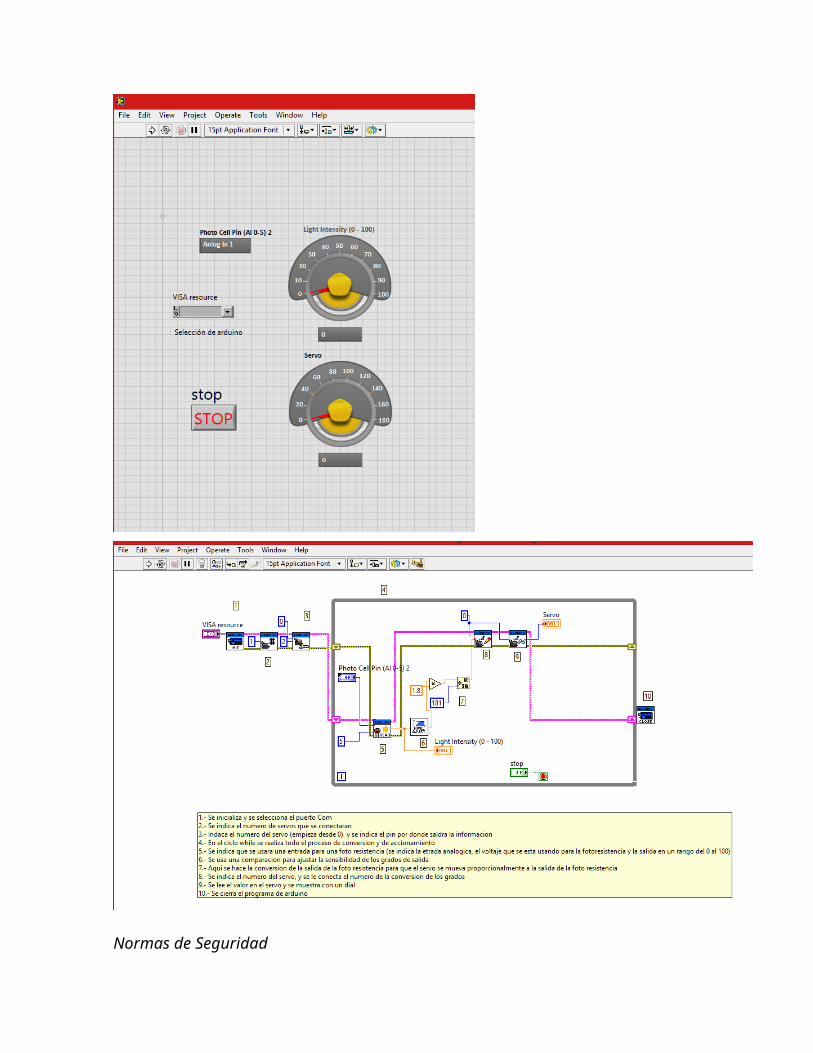
Simulación
Normas de Seguridad

• Evitar colocar obstáculos
• Evitar mojar el circuito y/o manipular sus componentes
• Evitar colocar algún objeto durante el funcionamiento
CAPITULO IV: COSTES, COMERCIALIZACION Y/O MANTENIMIENTO
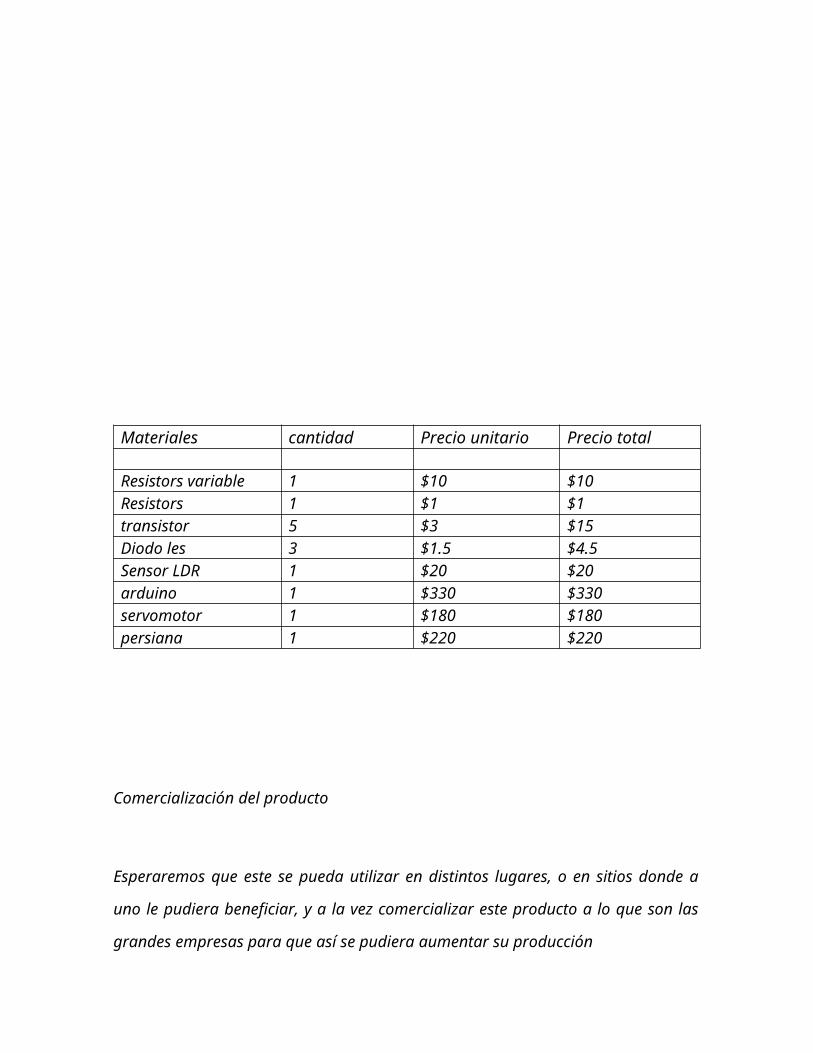
Materiales cantidad Precio unitario Precio total
Resistors variable 1 $10 $10Resistors 1 $1 $1transistor 5 $3 $15Diodo les 3 $1.5 $4.5Sensor LDR 1 $20 $20arduino 1 $330 $330servomotor 1 $180 $180persiana 1 $220 $220
Comercialización del producto
Esperaremos que este se pueda utilizar en distintos lugares, o en sitios donde a
uno le pudiera beneficiar, y a la vez comercializar este producto a lo que son las
grandes empresas para que así se pudiera aumentar su producción
Este producto será muy viable para todos aquellos que los obtenga
Las persianas automáticas se venderán en un precio de $
Mantenimiento Preventivo

Se denomina mantenimiento preventivo a aquel servicio de mantenimiento que se
realiza regularmente y que tiene como fin anticipar probables fallas en el
funcionamiento, así como identificar aquellas piezas que sufren mayor desgaste.
Son dos las finalidades básicas del mantenimiento preventivo:
Inspeccionar y monitorear de manera constante el estado de las piezas internas
de tal manera que se pueda identificar y eliminar aquellos problemas menores que
podrían convertirse en mayores.
Como resultado de lo anterior el usuario podrá mantenerlo y operarlo al 100% de
su capacidad.
Cada cuánto hacer un mantenimiento preventivo
El primer mantenimiento preventivo en cualquier tipo se debe realizar una vez
cumplidas las primeras 48 horas de trabajo (en los equipos nuevos). Durante este
primer mantenimiento los técnicos verifican el correcto funcionamiento para así
asegurar que responderá al 100% de las exigencias del usuario.
Este sistema se repite hasta llegar a las 1000 horas de trabajo. Este
mantenimiento demanda un mayor grado de trabajo y recambio de piezas. Al
margen de esto, si hubiera que hacer alguna otra corrección esta se realizaría, sin
embargo lo señalado es lo mínimo indispensable que requiere para lograr un
desempeño satisfactorio.
El mantenimiento correctivo
Este mantenimiento busca corregir fallas que presenta y que pueden surgir del
natural desgate de las piezas, de la ausencia de mantenimientos preventivos o de
una falla surgida durante las operaciones diarias. A diferencia de los
mantenimientos preventivos los mantenimientos correctivos no tienen una
periodicidad establecida.
La incidencia de los mantenimientos correctivos puede bajar considerablemente
siempre y cuando los mantenimientos preventivos se realicen periódicamente
según lo establecido.
Proceso para la detención de fallas.
Para este proceso, la cual ya se estará haciendo la construcción de este se
deberá hacer con mucho cuidado, con disciplina, responsabilidad ya que por
cualquier detalle podría causar problemas en la elaboración de este en lugares
específicos.
Este se deberá detectar y localizar esas futuras fallas y ver posibles causas del
problema y corregirlo desde su origen. Y para poder seguir continuando con este,
se deberá tomar posibles acciones para de mantenimiento para la corrección de
fallas, y a la vez aprenderemos a detectar problemas y a solucionarlo.
Desarrollo del problema.
Se deberá de localizar el origen de la falla, para la cual se desarrollara la situación
del problema y de inmediato se detendrá el proceso para poder ver el detalle del
porque no se está manejando del todo bien, o de que es lo que está fallando para
la cual no se esté manipulando correctamente.
Acciones de mantenimiento.
Se realizara posibles acciones de mantenimiento de acuerdo a la falla que pudiera
suceder a la hora de probar este pero a la vez seguir un orden establecido que
contenga acciones de seguridad para poder evitar accidentes o cosas que
pudieran afectarnos o afectar a nuestro prototipo de manera responsable y
disciplinario. Se verá las causa de la cual se originó el problema y se solucionar
de manera eficiente.
Propuestas de soluciones.
Se tendrá que hacer una lluvia de ideas, la cual el tema principal será la
resolución de las fallas detectadas, y así dar propuestas para corregir esta de
manera fácil, rápida y sin mucho costo y a la vez se podrá tomar una decisión
grupal que será la más conveniente para el prototipo.
Solución de fallas.
El equipo deberá plantear posibles soluciones ye que estas se hayan detectado,
una vez que ya se encontraron se deberá solucionar con las soluciones puestas
por equipo y tomar una la mejor decisión para que se pueda corregir esta y poder
continuar con el análisis y prototipo