vector posición de un punto de y de . notación vectorial
TRANSCRIPT

SEXTA GUÍA
GEOMETRÍA VECTORIAL
Segundo Semestre 2018
Vector posición de un punto de 2
y de 3
. Notación vectorial.
Recordemos que un modelo geométrico del conjunto lo constituye los puntos de una recta, en la cual se ha elegido un punto cualquiera al que se le hace corresponder el real 0 y mediante una medida unitaria arbitraria se ubican, hacia la derecha del 0,
los puntos de y hacia la izquierda los puntos de . La representación geométrica de 2 , a partir de un sistema coordenado de referencia, está constituido por un plano determinado por dos rectas ortogonales
cuyo punto de intersección representa al par 0,0 llamado origen del sistema, a
partir de este punto se orientan las rectas determinando cuatro cuadrantes. A cada punto P del plano cartesiano le corresponde una única coordenada (x, y) de 2 y viceversa; a partir de esta representación se desarrolla lo que denominamos
Geometría Analítica Plana. En forma similar, podemos representar los puntos de 3 en el espacio tridimensional usando tres ejes coordenados de referencia llamados eje x, eje y, eje z y desarrollar la Geometría Analítica del Espacio. Estos tres ejes dividen al espacio tridimensional en 8 octantes separados por tres planos perpendiculares entre sí.
Un elemento , ,x y z de 3 se asocia con cada punto , ,P x y z del espacio geométrico tridimensional, se dice
que un sistema de coordenadas rectangulares en el espacio establece una correspondencia biunívoca entre cada punto del espacio y una terna ordenada de número reales. Ejemplo. Graficar el punto A(3, 2, 4) Solución: Para el punto A, se grafica en primer lugar el par (3, 2) en el plano XY, como es usual. Luego se traza una recta paralela al eje z que pasa por (3, 2) y sobre esta recta se mide 4 unidades en sentido positivo. El punto obtenido representa A (3, 2, 4).
El concepto de vector está asociado frecuentemente a las aplicaciones en matemáticas, física e ingeniería, que están relacionadas con cantidades que poseen magnitud, dirección y sentido, como por ejemplos: fuerza, velocidad, aceleración y desplazamiento. Su representación gráfica es la característica flecha con que se asocia este concepto. Un segmento de recta dirigido, cuya longitud es la magnitud del vector, la punta de la flecha indica el sentido, y su inclinación, la dirección.

Es posible establecer matemáticamente el concepto de vector, es decir, considerar que un vector es un elemento de un conjunto que satisface ciertas propiedades. Comenzaremos definiendo operaciones en Rn de modo que este conjunto tenga una estructura de Espacio Vectorial. Definición 1. El conjunto n
, n , llamado espacio n-dimensional, es:
1 2, ,..., / , 1,2,...,n
n iu x x x x i n
Si n = 2 entonces 2 , / ,u x y x y , vector en el plano bidimensional.
Si n = 3 entonces 3 , , / , ,u x y z x y z , vector en el espacio tridimensional.
Suma de Vectores. Propiedades.
En n se define las siguientes operaciones:
Si 1 2, ,..., nu x x x ; ⃗ 1 2, ,..., nv y y y son elementos de n y , se tiene:
a. Suma: 1 1 2 2, ,..., n nu v x y x y x y .
b. Producto por un escalar: 1 2, ,..., nu x x x .
c. Igualdad: , 1,2,...,i iu v x y i n .
Para estas operaciones se verifican las siguientes propiedades: Propiedades para la suma.
Sí 1 2, ,..., nu x x x ; 1 2, ,..., nv y y y , 1 2, ,..., nw z z z son elementos de n y , se tiene:
1. Asociatividad: ⃗ u v w u v w .
2. Elemento Neutro:
, 0 0 0 0,0, ...( ,0 )n nu u u tal que = Aquí
3. Elemento inverso:
1 2,, 0 ,..., .n
n nu x x xu u u u tal que Aquí
4. Conmutatividad: u v v u Producto de un vector por un escalar. Propiedades para el producto por escalar.
5. u v u v .
6. u u u .
7. u u (αβ).
8. 1 u u .
La verificación de estas propiedades permiten concluir que n es un espacio vectorial sobre . Así, matemáticamente un vector es un elemento de un espacio vectorial. Los elementos de se denominan escalares. Observación 1.
a. Se define la resta de ⃗u y ⃗v en Rn por: u v u v .
b. En lo sucesivo se trabajará en los espacios vectoriales 2 y 3 . Es decir se trabajará con vectores que serán pares ordenados o tríos ordenados de números reales.
Norma y dirección de un vector. Vectores unitarios. Cosenos directores de un vector.

Para graficar un vector en 3 , se preserva la interpretación física de un vector como una flecha. Se asocia al trío ordenado (x, y, z) en 3 una flecha que une el origen del sistema de coordenadas con el
punto ( , , )P x y z , este vector OP designado por r se llama vector
posición de P , donde O es el punto inicial y P el punto final de r .
Cualquier segmento de recta dirigido, el cual es igual a OP está
también representado por el vector r . Observación 2. a. Se acostumbra definir un vector como el conjunto de todos los
segmentos orientados que tiene una magnitud, una dirección y un sentido. b. Recordemos que también lo aplicamos en 2 .
Gráfica de la suma de vectores y producto escalar por un vector en 3
.
Sean 1 1 1 1, ,u x y z y 2 2 2 2, ,u x y z en 3 , entonces 1 2 1 2 1 2 1 2, ,u u x x y y z z tiene como representación
gráfica,
Se observa que 1 2u u está representado por una echa que va desde el origen al vértice opuesto del
paralelogramo cuyos lados son las echas que representan a 1u y 2u . Esta suma de vectores se conoce como ley
del paralelogramo para la suma.
Si 1 1 1 1, ,u x y z y , 0 el vector 1 1 1 1, ,u x y z tiene como representación gráfica:
Observación 3.
a. Si 0 , el vector 1u es veces el vector 1u en el mismo sentido de 1u y si 0 tendría dirección opuesta
a 1u y |α| veces este vector.
b. Para efectuar la resta entre vectores 1 2u u , al vector 1u se le suma el vector opuesto a 2u .
Definición 2. Dos vectores r y p son paralelos si uno es múltiplo escalar del otro, esto es , r t p t .
Definición 3.
a. Se denomina Norma o Magnitud de un vector 3 2 2 2r x, y,z , r x y z al número dado por la
expresión: 2 2 2 r x y z .
b. Si el vector 2 2 2r x, y , r x y .
c. En general si n 2 2 2
1 2 n 1 2 nr x ,x ,...,x , r x x ... x
Propiedades de la Norma
Sean , nr u , entonces
a. 0; 0 r r si y sólo si 0r
b. r u r u
c. , r r
Definición 4. Un vector nr , es unitario si 1r , se denota por r .
Observación 4. Si nr y 0r entonces: r
rr
, es un vector unitario en la dirección y sentido del vector r .
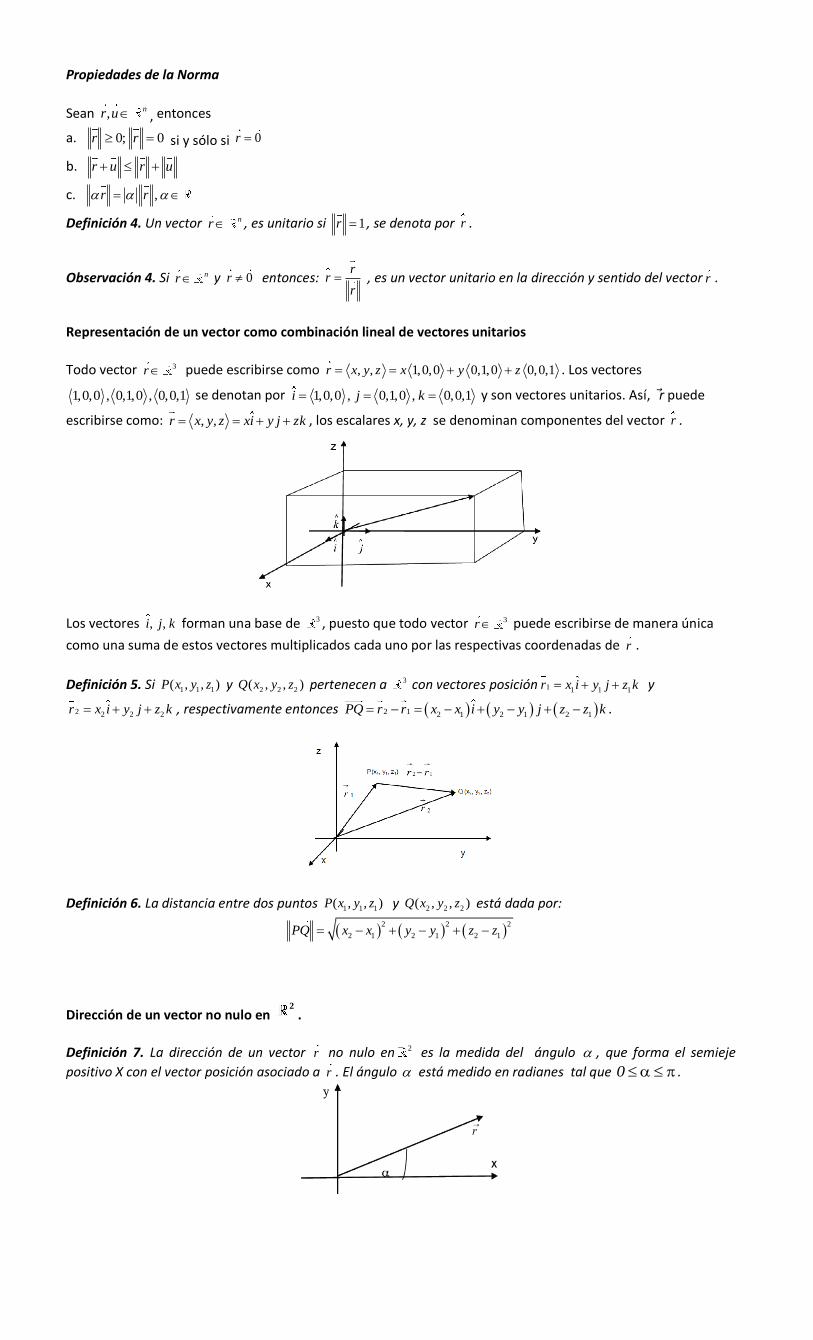
Representación de un vector como combinación lineal de vectores unitarios
Todo vector 3r puede escribirse como , , 1,0,0 0,1,0 0,0,1r x y z x y z . Los vectores
1,0,0 , 0,1,0 , 0,0,1 se denotan por 1,0,0 , 0,1,0 , 0,0,1i j k y son vectores unitarios. Así, ⃗r puede
escribirse como: , ,r x y z xi y j zk , los escalares x, y, z se denominan componentes del vector r .
Los vectores , ,i j k forman una base de 3 , puesto que todo vector 3r puede escribirse de manera única
como una suma de estos vectores multiplicados cada uno por las respectivas coordenadas de r .
Definición 5. Si 1 1 1( , , )P x y z y 2 2 2( , , )Q x y z pertenecen a 3 con vectores posición 1 1 1 1 r x i y j z k y
2 2 2 2 r x i y j z k , respectivamente entonces 2 1 2 1 2 1 2 1 PQ r r x x i y y j z z k .
Definición 6. La distancia entre dos puntos 1 1 1( , , )P x y z y 2 2 2( , , )Q x y z está dada por:
2 2 2
2 1 2 1 2 1PQ x x y y z z
Dirección de un vector no nulo en 2
.
Definición 7. La dirección de un vector r no nulo en 2 es la medida del ángulo , que forma el semieje
positivo X con el vector posición asociado a r . El ángulo está medido en radianes tal que 0 .

Si r xi y j , se cumple además que:
y x y
sin , cos , tanxr r
y r r cos i r sin j
Dirección de un vector no nulo en 3
.
La dirección de un vector no nulo en 3 está dada por tres ángulos llamados ángulos directores del vector.
Definición 8. Los ángulos directores de un vector r no nulo en 3 son los tres ángulos , , que forman
respectivamente los ejes positivos X, Y, Z con el vector posición asociado a r . Los ángulos α, β, γ están medidos en radianes tales que 0 , , .
Definición 9. Los cosenos de los ángulos directores α, β, γ del vector no nulo 3r x, y,z , se denominan
cosenos directores del vector r .
Teorema 1. 2 2 2cos cos cos 1 , donde cos ,cos y cos son los cosenos directores del
vector no nulo 3r . Observación.
a. Cualquier vector r no nulo puede expresarse en términos de su norma y cosenos directores
r r cos i r cos j r cos k .
b. Si el vector es unitario, se tiene r cos i cos j cos k , es decir los componentes de un vector
unitario son sus cosenos directores. Producto entre vectores: interno, cruz, triple. Propiedades.
Definición 10. El producto punto o escalar entre los vectores no nulos 1 2 3a a ,a ,a y 1 2 3b b ,b ,b , que se
denota por a b , es el número real dado por 1 1 2 2 3 3a b a b a b a b .
Observación 5.
a. 2
2 2 2
1 2 3a a a a a a .
b. i j j k k i 0.
c. i i j j k k 1
Propiedades del producto punto
Sean a,b,c vectores cualesquiera en 3
y k , entonces:
a. a b b a (conmutatividad).

b. a b c a b a c (distributividad).
c. ka b k a b a kb a b k .
d. 0 a 0
Observación 6.
a. Si a c b c , entonces no se puede concluir que a b .
b. Si a c 0 no necesariamente a 0 c 0 .
Teorema 2. Si los vectores a y b forman un ángulo (medida en radianes) y 0 entonces:
a b a b cos . Si a 0 o b 0 entonces a b 0 .
Demostración: Considerar a y b como en la figura
Aplicando el teorema del coseno en OAB se tiene:
2 2 2
a b a b 2 a b cos .
Por Definición de producto punto 2 2 2
a b a b a b a a 2a b b b a b 2a b
Igualando, se tiene 2 2 2 2
a b 2 a b cos a b 2a b, luego: a b a b cos
Observación 7. De lo anterior se concluye: a b
cosa b
.
Teorema 3. Dos vectores no nulos 3a,b son perpendiculares u ortogonales (denotado por ⃗a ⊥⃗b) si y sólo
si ⃗ a b 0 . Demostración:
) Sea a b , entonces2
. Luego a b a b cos 0
2
.
) Sea a y b son vectores no nulos en 3
entonces a 0 y b 0 , luego cos 0 . Por lo tanto
2
y a b .
Definición 11. La proyección del vector OP en la dirección OQ es el segmento de recta dirigido OR donde R
es el pie de la perpendicular desde el punto P a la recta que contiene al vector OQ.

OR se denomina vector proyección del vector a a sobre el vector b .
Como a y a cb son perpendiculares, entonces 2
a ba cb b 0 c
b
Luego 2
a b a bcb b cb b
bb
, y como sabemos que
a bcos
a b
entonces
a ba cos
b
así
b
Pr oy a a cos a b.
Definición 12. La proyección escalar del vector a sobre el vector b se define como a cos donde es el
ángulo comprendido entre a y b , se denota por: b
Pr oy a a cos a b.
Observar que la proyección escalar puede ser positiva o negativa según si 2
o
2
.
Definición 13. La proyección vectorial del vector a sobre el vector b se define como a cos b donde b es el
vector unitario en la dirección y sentido del vector b . Se denota por:
b bPr oy a a cos b Pr oy a b.
Producto cruz o vectorial entre vectores. Propiedades.
Definición 14. El producto cruz o vectorial entre los vectores 1 2 3a a ,a ,a y
1 2 3b b ,b ,b , que se denota por
xa b , está dado por 2 3 3 2 3 1 1 3 1 2 2 1xa b a b a b ,a b a b ,a b a b
Observación 8. El cálculo de xa b se puede realizar, usando la notación de determinantes.
1 2 3 2 3 3 2 3 1 1 3 1 2 2 1
1 2 3
x
i j k
a b a a a a b a b i a b a b j a b a b k
b b b

Propiedades del producto vectorial
Sean 1 2 3a a ,a ,a ,
1 2 3b b ,b ,b y 1 2 3a c ,c ,c
vectores en
3, .
a. xa a 0 .
b. x x0 a a 0 0 .
c. x xa b b a , no conmutativa.
d. x x xa b c a b a c .
e. x x xa b a b a b .
Demostración:
a. 1 2 3 2 3 2 3 1 3 1 3 1 2 1 2
1 2 3
x
i j k
a a a a a a a a a i a a a a j a a a a k 0
a a a
b. 1 2 3 2 3 3 2 1 3 3 1 1 2 2 1
1 2 3
x
i j k
a b a a a a b a b i a b a b j a b a b k ,
b b b
=
2 3 1 3 1 2
1 2 3
2 3 1 3 1 2
1 2 3
2 3 2 3 1 3 1 3 1 2 1 2
2 3 2 3 1 3 3 1 1 2 2 1
x
x
i j kb b b b b b
a b b b b i j ka a a a a a
a a a
b a a b i b a a b j b a a b k
a b b a i a b a b j a b a b k
a b
Observación 9. De las propiedades a. y b. y de la definición de producto cruz, se concluye que:
x x xi i j j k k 0
x x xi j k; j k i; k i j
x x xj i k; k j i; i k j
El producto cruz de vectores no es asociativo.
Contraejemplo: x x xi i j i k j pero x x xi i j 0 j 0 .
Teorema 4. Si a y b son vectores en 3
y el ángulo que ellos forman entonces: xa b a b sin
Teorema 5. Si a y b generan un paralelogramo, el área de éste viene dada por: P xA a b .
Demostración: Considerando la figura
P xA base altura a b sin a b

Corolario. Si los vectores son los lados de un triángulo, entonces el área de éste es T x
1A a b
2 .
Teorema 6. Si a y b son dos vectores en 3
, entonces a y b son paralelos si y sólo sí xa b 0 .
Productos Triples
Definición 15. Si a,b y c vectores en 3
, entonces la expresión xa b c se llama producto triple escalar
entre a,b y c .
Teorema 7. Si 1 2 3a a ,a ,a ,
1 2 3b b ,b ,b y 1 2 3a c ,c ,c entonces:
1 2 3
1 2 3
1 2 3
x
a a a
a b c b b b
c c c
Demostración: Se tiene que
=
=
1 2 3 1 2 3
1 2 3
2 3 1 3 1 2
1 2 3
2 3 1 3 1 2
1 2 3
2 3 1 3 1 2
1 2 3 1 2 3
2 3 1 3 1 2
1 2 3
x
i j k
a b c a i a j a k a a a
b b b
b b b b b ba i a j a k i j k
c c c c c c
a a ab b b b b b
a a a k b b bc c c c c c
c c c
Observación 10. a. El triple producto escalar se efectúa en el orden que viene indicado. b. En lo sucesivo no se usará el paréntesis para el producto triple escalar, ya que se subentiende la prioridad de
las operaciones.
Teorema 8. Si a,b y c son vectores en 3
, entonces x xa b c a b c .
De forma similar se puede verificar que:
x x xa b c c a b b c a .
Teorema 9. Si a,b son vectores no paralelos y no nulos en 3
, entonces el vector xa b es ortogonal a ambos a
y b . Demostración:
Del teorema se tiene: x xa a b a a b y además xa a 0 , entonces xa a b 0 b 0 , como a y xa b son
no nulos, y su producto es cero, entonces a y xa b son ortogonales. De igual manera:
x xa b b a b b a 0 0 , como b y xa b son no nulos, entonces b y xa b son ortogonales.
Observación 11. Resumiendo todas las propiedades anteriormente mencionadas del producto cruz es posible plantear que:
a. Si xa b 0 entonces a y b tienen el mismo sentido, o sentidos opuestos, o uno de estos vectores es cero.
b. Si xa b 0 entonces xa b es un vector cuya magnitud es numéricamente igual al área del paralelogramo de
lados adyacentes a y b , cuya dirección es perpendicular a ambos vectores a y b en el mismo sentido en el que avanzaría un tornillo de rosca derecha si se gira en la misma forma.

Teorema 10. Sean a , b y c vectores no coplanares en 3
y el paralelepípedo generado al considerar estos
vectores como sus aristas, entonces el volumen de este paralelepípedo está dado por: xV a b c .
Demostración: Sean a , b y c como en la figura
Volumen ( altura )( área basal ) .
xÁrea Basal b c , Altura h a cos , donde es el ángulo entre a y xb c .
Luego
x
x
x
V a cos b c
a b c cos
a b c
Por lo tanto xV a b c .
Cuestionario
1) Sean �⃗⃗� y �⃗� vectores, tal que �⃗⃗� = 𝑘�⃗�, 𝑘 ∈ 𝑅, entonces �⃗⃗� y �⃗� son __________________________
2) Si �⃗⃗� = (𝑥, 𝑦, 𝑧) es un vector en 𝑅3, entonces su norma ‖�⃗⃗�‖ está definida por ______________
3) Si ‖�⃗⃗�‖ = 1, entonces �⃗⃗� se llama ______________________
4) Un vector unitario en la dirección de �⃗� , se denota por _________________ y se obtiene
mediante_______________
5) Los vectores unitarios (1,0,0), (0,1,0), (0,0,1) se denotan, respectivamente por ___, ___, ____
6) Se llaman ángulos directores a ________________
7) Los cosenos directores del vector �⃗� = (𝑎1, 𝑎2, 𝑎3) vienen dados por _________________
8) Si �⃗� = (𝑎1, 𝑎2, 𝑎3) y �⃗⃗� = (𝑏1, 𝑏2, 𝑏3) son vectores en 𝑅3, entonces, el producto escalar �⃗� ∙ �⃗⃗� de ellos viene
dado por ___________
9) Sean �⃗� y �⃗⃗� vectores, y sea 𝜃 el ángulo formado por ellos, entonces �⃗� ∙ �⃗⃗� = ________________
10) El ángulo formado por los vectores �⃗� = (𝑎1, 𝑎2, 𝑎3) y �⃗⃗� = (𝑏1, 𝑏2, 𝑏3) está dado por ____________
11) La proyección escalar de �⃗⃗� sobre �⃗� está dada por____________________
12) Si �⃗� = (𝑎1, 𝑎2, 𝑎3) y �⃗⃗� = (𝑏1, 𝑏2, 𝑏3) son vectores en 𝑅3, entonces, el producto vectorial �⃗�𝑥�⃗⃗� de ellos
viene dado por ___________
13) Sean �⃗� y �⃗⃗� vectores, y sea 𝜃 el ángulo formado por ellos, entonces ‖�⃗�𝑥�⃗⃗�‖ = ____________
14) El área de un paralelogramo generado por los vectores �⃗� y �⃗⃗� como aristas, es numéricamente igual a
______________
15) Si �⃗�𝑥�⃗⃗� = 0⃗⃗ entonces _________
16) Si i �⃗� = (𝑎1, 𝑎2, 𝑎3) , �⃗⃗� = (𝑏1, 𝑏2, 𝑏3) , 𝑐 = (𝑐1, 𝑐2, 𝑐3) son vectores en 𝑅3. El producto �⃗� ∙ �⃗⃗� 𝑥 �⃗⃗⃗� se llama
_____________________________ y está dado por ______________________
17) Si �⃗� ∙ �⃗⃗� 𝑥 �⃗⃗⃗� = 0 entonces �⃗�, �⃗⃗� , �⃗⃗⃗� son ___________________________

Ejercicios de Desarrollo 1. Determine si las siguientes afirmaciones relacionadas con el producto punto son verdaderas o falsas.
Justifique en ambas casos.
a. 2
a a a
b. a b 0 a 0 b 0
c. i k j
d. a a i i a j j a k k
2. Calcular los ángulos internos del ABC cuyos vértices son los puntos A 1,0,2 , B 2,1, 1 y
C 1, 2,3 .
3. Dado los puntos A(6, 1, 1), B(−3, 2, 1), y C(7,−2, 8) se pide:
a. Un vector unitario en la dirección AB 2AC
b. Ángulos directores del vector BC c. Determinar un punto D de modo que los puntos ABDC formen un paralelogramo y calcular su perímetro.
4. Hallar el valor de h de modo que v hu sea ortogonal a u , donde u 2i 3 j 6k , con v 7i 14k
Si , ,a 1 0 2 , , ,b 2 3 6 , , ,c 2 2 1 , determinar:
a. La proyección escalar de a sobre b .
b. La proyección escalar de c sobre 2a b .
c. La proyección vectorial de a 2b c sobre el eje Y.
5. Determine un vector ortogonal a los dos vectores a i j k y b i j .
6. Hallar el área del triángulo cuyos vértices son los puntos (3,−1, 2); (1,−1.−3) y (4,−3, 1).
7. Encontrar el volumen del paralelepípedo cuyas aristas están dadas por: a i 3 j 2k ;b 2i j k
y c i 2 j k .
8. Encontrar la constante t de modo que los vectores 2i j k ; i j 3k y 3i t j 5k sean coplanares.
9. Dados los vectores u 3,1, 2 ; v 2, 1,1 ; w 3, 4,1 . Determinar
a. w v u
b. 2u 3v
c. El vector unitario de v w
10. Si u 2x 7, y,x 1 ; v y,x 5, y 6 , hallar los valores de x e y , de modo que u v .
11. Dados los puntos A 2,4,1 y B 1, 1,2 . Determinar los cosenos directores del vector AB .
12. Hallar los escalares y tal que el vector u 4i 6 j 20k se escriba como una combinación lineal de
los vectores a 2i j 3k y b 6i j 4k .
13. Dados los vectores en 3
, A 2, 1,3 ; B 2,2, 3 ; C 1,0,4 . Determinar
a. la dirección de los vectores posiciones.
b. La dirección de los vectores AB;CA y CB .
14. Dados los vectores en 3
, A 2, 1,3 ; B 2,2, 3 ; C 1,0,4 . Hallar
a. Proyección escalar y vectorial del vector v sobre el vector u .
b. Volumen del paralelepípedo de los vectores u,v, w .
15. Dados los vectores a 3i j 2k , b 5 j k y c 4i 7 j 3k , hallar
a. Un vector unitario en la dirección de 2a b
b. Los ángulos directores de a .
c. 2a b
d. El ángulo entre a y c .
e. La proyección escalar y vectorial de a sobre b c
f. x3b c
g. Un vector unitario perpendicular a los vectores a y b .

h. El área del paralelogramo determinado por los vectores a y c
i. El volumen del paralelepípedo determinado por los vectores a,b y c .
16. Dados los puntos P 8, 1,2 , Q 4,5, 7 y R 1,2,1 . Hallar un vector de norma 3 perpendicular a los
vectores PQ y PR .
17. Sean a y b vectores de 3
. Si a 3 , b 4 y a b 6 . Determinar el valor del número real dado
por a 2b a .
18. Sean los vectores a y b de 3
. Demostrar que:
a.
2 2
a b a ba b
4
b. 22 2 2
xa b a b a b
19. Dados �⃗� = ⟨2, −3, −4⟩, �⃗⃗� = ⟨1, 5, −1⟩ , 𝑐 = ⟨−2, 0, 6⟩ determinar:
a) El vector �⃗⃗� , tal que �⃗⃗� = 3�⃗� + 2�⃗⃗� − 2 − (�⃗�𝑥𝑐 + 𝑐𝑥�⃗�)
b) El valor de L, si 𝐿 = �⃗� ∙ �⃗⃗� 𝑥 �⃗⃗⃗� + �⃗� ∙ (𝑐 − �⃗⃗⃗�) − ‖�⃗⃗� − �⃗⃗⃗�‖
c) Si los vectores �⃗�, �⃗⃗� , �⃗⃗⃗� son coplanares.
20. Dados los vectores 𝑟1 = 5 𝑖̂ − 2 𝑗̂ + 4�̂� , 𝑟2 = 2 𝑖̂ + 5 𝑗̂ − 4�̂� , 𝑟3 = 4 𝑖̂ − 5 𝑗̂ + 2�̂� , 𝑟4 = 5 𝑖̂ + 4 𝑗̂ − 5�̂� ,
𝑟5 = −6 𝑖̂ + 15 𝑗̂ + 12�̂�
Determinar:
a) ‖𝑟1𝑥(𝑟2 − 𝑟3 + 𝑟4)‖
b) El volumen del paralelepípedo formado por los vectores 𝑟2, 𝑟4, �⃗⃗⃗�5
c) Si los vectores 𝑟1 y 𝑟3 son paralelos
d) Si los vectores 𝑟2 y 𝑟5 son perpendiculares
e) Un vector perpendicular a 𝑟2 y 𝑟4
f) Los cosenos directores de 𝑟2
g) Los ángulos del triángulo formado por 𝑟3 y 𝑟5
21. Dados los vectores �⃗⃗� = ⟨2, −6, 𝑡 − 2⟩, �⃗� = ⟨1, 4, 2⟩, �⃗⃗⃗� = ⟨4, −1, 8⟩ se pide obtener el valor de t, para que el
vector (�⃗⃗� + 𝑣 ⃗⃗⃗ ⃗) 𝑥 �⃗⃗⃗� sea ortogonal al vector (�⃗⃗⃗� − 𝑣 ⃗⃗⃗ ⃗).
22. Dados los puntos 𝐴(5, −2, 4) , 𝐵(−7, 3, 1) y 𝐶(4, 6, −5) se pide
a) El perímetro del triángulo ABC
b) La superficie del triángulo ABC
c) El ángulo ABC.
23. Sean 𝐴 = 3 𝑖̂ + 4 𝑗 ̂, �⃗⃗� = 𝑖̂ + 𝑡 𝑗̂ determinar t tal que:
a) 𝐴 y �⃗⃗� sean ortogonales
b) 𝐴 y �⃗⃗� sean paralelos
c) El ángulo entre 𝐴 y �⃗⃗� sea 𝜋
4.
24. Dados los puntos 𝐴(3, −2, 14) , 𝐵(−1, 2, 4) , 𝐶(2, 3, −1) , 𝐷(2, 2, 1) se pide
a) El volumen del paralelepípedo determinado por los vectores 𝐶𝐴⃗⃗⃗⃗⃗⃗ , 𝐶𝐵⃗⃗⃗⃗⃗⃗ , 𝐶𝐷⃗⃗⃗⃗ ⃗⃗ como arista,
b) Proyección escalar de 𝐶𝐵⃗⃗⃗⃗⃗⃗ sobre 𝐶𝐷⃗⃗⃗⃗ ⃗⃗
c) Un vector unitario 𝑟 que sea ortogonal tanto a 𝐶𝐴⃗⃗⃗⃗⃗⃗ como 𝐶𝐷⃗⃗⃗⃗ ⃗⃗