universidad de jaÉn escuela politécnica superior de...
TRANSCRIPT
Escu
ela
Polit
écni
ca S
uper
ior d
e Ja
én
DISEÑO DE TRANSMISIÓN SECUNDARIA INNOVADORA
PARA MOTOCICLETA
Alumno: Manuel Gonzalo Alcázar Vargas
Tutor: Prof. D. José Enrique Mata Bago
Dpto.: Ingeniería mecánica y minera
Junio, 2015
UNIVERSIDAD DE JAÉN
Escuela Politécnica Superior de Jaén
Trabajo Fin de Grado
Universidad de Jaén
Escuela Politécnica Superior de Jaén Departamento de Ingeniería Mecánica y Minera
Don José Enrique Mata Bago, tutor del Trabajo Fin de Grado titulado: Diseño de transmisión secundaria innovadora para motocicleta, que presenta Manuel Gonzalo Alcázar Vargas, autoriza su presentación para defensa y evaluación en la Escuela Politécnica Superior de Jaén.
Jaén, junio de 2015
El alumno: El tutor:
Manuel G. Alcázar Vargas José Enrique Mata Bago

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
ii Escuela Politécnica Superior de Jaén. Universidad de Jaén
“No business will ever be able to take
away the adventuresome, and somewhat
crazy, nature of the motorcycle”
V. Cossalter
Agradecimientos:
.
A mi tutor, D. José E. Mata Bago, por su interés en enseñarnos,
por sus continuos esfuerzos para formarnos como ingenieros, transmitirnos
sus conocimientos, experiencias y, especialmente, por compartir con nosotros
su ilusión hacia el mundo de la moto.
A Jorge M. Mercado Colmenero, por su apoyo continuo en el proyecto
MotoStudent, que nos ha enseñado a trabajar en Equipo.
A mi familia y amigos.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
iii Escuela Politécnica Superior de Jaén. Universidad de Jaén
Contenido
1. Objetivo del proyecto ...................................................................................................... 1
2. Alcance .......................................................................................................................... 2
3. Motivación ...................................................................................................................... 3
4. Antecedentes ................................................................................................................. 7
4.1. Comentarios y presentación .................................................................................... 7
4.2. Proyecto Motostudent ............................................................................................. 7
4.2.1. Objeto .............................................................................................................. 7
4.2.2. Fases. .............................................................................................................. 8
4.2.3. Reglamentación y normativa: Sistema de transmisión ....................................10
4.2.4. Nomenclatura ..................................................................................................11
5. Cinemática de los elementos de la transmisión secundaria ...........................................13
5.1. Introducción. Parámetros que intervienen ..............................................................14
5.2. Firme. Perfil senoidal ..............................................................................................14
5.3. Hipótesis #1.- Adherencia neumático-firme infinita .................................................17
5.3.1. Desarrollo matemático ....................................................................................17
5.3.2. Conclusiones ..................................................................................................25
5.4. Hipótesis #2.- Motor con inercia infinita ..................................................................28
5.4.1. Caso 1.- Ejes del piñón y del basculante concéntricos ....................................28
5.4.2. Caso 2.- Ejes del piñón y del basculante separados una distancia Δ ..............31
5.5. Hipótesis #3.- Velocidad angular del piñón motor con adherencia entre el firme y el neumático infinita. .............................................................................................................39
5.5.1. Desarrollo matemático ....................................................................................39
5.5.2. Conclusiones ..................................................................................................42
5.5.3. Estimación del par motriz efectivo al pasar la motocicleta por un firme irregular. Caso práctico ................................................................................................................49
6. Conclusiones .................................................................................................................52
7. Anejos ...........................................................................................................................54
7.1. Anejo 1: Squat, ángulo de squat y antisquat ..........................................................54
7.2. Anejo 2: Cálculo analítico de la fuerza de contacto neumático-suelo .....................59
7.3. Anejo 3: Códigos programados en Matlab® durante el desarrollo del trabajo .........61
7.3.1. Código raíz ......................................................................................................61
7.3.2. Código para determinar la posición del sistema en función del tiempo ............64

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
iv Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.3.3. Código empleado para elaborar algunas gráficas ...........................................68
7.3.4. Código empleado en pintar las velocidades y aceleraciones de la rueda trasera 70
7.3.5. Código empleado en representar la Gráfica 15 ...............................................73
7.3.6. Código empleado en evaluar la ecuación diferencial del sistema vibrante ......75
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
v Escuela Politécnica Superior de Jaén. Universidad de Jaén
Índice de ilustraciones
Ilustración 1.- Equipo EPS-UJATeam 2012-2014. Alcañiz (Teruel), octubre 2014 ................. 3
Ilustración 2.- Prototipo de motocicleta eléctrica. Fotografía tomada en Alcañiz (Teruel),
octubre de 2014 ................................................................................................. 5
Ilustración 3.- Imagen CAD del motor eléctrico. Archivo CAD suministrado por la
organización. Cotas generales del motor ............................................................ 6
Ilustración 4.- Logo de la competición Motostudent Electric. ................................................. 8
Ilustración 5.- Prototipo MT PRO 02 siendo sometido a las verificaciones técnicas. Alcañiz
(Teruel), octubre 2014. ........................................................................................ 9
Ilustración 6.- Prototipo MT PRO 02 siendo sometido a las pruebas dinámicas. Alcañiz
(Teruel), octubre 2014 ......................................................................................... 9
Ilustración 7.- Prototipo MT PRO 02 antes de la carrera. Alcañiz (Teruel), octubre 2014 .....10
Ilustración 8.- Fotografía de perfil del prototipo RC2013V. Jaén, diciembre 2014 .................21
Ilustración 9.- Cotas estimadas del prototipo RC2013V. Jaén, diciembre 2014 ....................22
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
vi Escuela Politécnica Superior de Jaén. Universidad de Jaén
Índice de figuras
Figura 1.- Parámetros geométricos del firme. Parámetros externos .....................................16
Figura 2.- Parámetros de diseño de la transmisión. ..............................................................16
Figura 3.- Parámetros necesarios para obtener la posición del sistema ...............................17
Figura 4.- Relación entre radios de curvatura que pueden presentar el neumático y el suelo
...........................................................................................................................18
Figura 5.- Detalle del punto de contacto neumático-suelo ....................................................19
Figura 6.- Análisis cinemático (𝝁𝝁 → ∞) mediante el CIR .......................................................23
Figura 7.- Triángulo CIR .......................................................................................................24
Figura 8.- Posición de referencia. (Exagerada con fines gráficos. No está a escala) ............28
Figura 9.- Rotación de la rueda con la corona fija al basculante ...........................................29
Figura 10.- Rotación en sentido horario de la rueda .............................................................29
Figura 11.- Geometría del sistema: Piñón-Corona-Basculante .............................................31
Figura 12.- Geometría del sistema: Piñón-Corona-Basculante .............................................33
Figura 13.- Geometría del sistema: Piñón-Corona-Basculante .............................................34
Figura 14.- Geometría del sistema: Piñón-Corona-Basculante .............................................35
Figura 15.- Geometría empleada para determinar la aceleración angular de la rueda en
función del tiempo. .............................................................................................41
Figura 16.- Velocidad angular del piñón motor frente al tiempo. Adherencia neumático-suelo
infinita. Velocidad de la moto constante. ............................................................42
Figura 17.- Equilibrio de pares en el sistema de transmisión de una motocicleta. ................51
Figura 18.- Definición gráfica del verbo squat en inglés. (Fuente: http://bonvecstrength.com)
...........................................................................................................................54
Figura 19.- Equilibrio estático en una motocicleta. ................................................................54
Figura 20.- Equilibrio dinámico en una motocicleta. ..............................................................55
Figura 21.- Cálculo gráfico de los parámetros del squat. ......................................................56
Figura 22.- Ejemplo de movimiento oscilatorio impuesto por las irregularidades del terreno. 1
grado de libertad. Fuente: (Cossalter, dinamoto) ................................................59

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
vii Escuela Politécnica Superior de Jaén. Universidad de Jaén
Índice de gráficas
Gráfica 1.- Solución gráfica al sistema de ecuaciones descrito en el apartado 5.3.
Motocicleta: RC2013V ........................................................................................23
Gráfica 2.- Velocidad angular de la rueda en función del tiempo. Adherencia infinita. Moto:
RC2013V ...........................................................................................................25
Gráfica 3.- Izquierda: Geometría de diseño (sin comprimir la suspensión) (𝝋𝝋𝝋𝝋 = 𝝋𝝋𝟎𝟎).
Derecha: Velocidad angular de la rueda en función del tiempo. Adherencia
infinita. ...............................................................................................................26
Gráfica 4.- Izquierda: Geometría de diseño (sin comprimir la suspensión) (𝝋𝝋𝝋𝝋 = +𝟏𝟏𝟏𝟏𝟎𝟎).
Derecha: Velocidad angular de la rueda en función del tiempo. Adherencia
infinita. ...............................................................................................................26
Gráfica 5.- Velocidad angular de la rueda bajo la hipótesis de inercia del motor infinita.
Velocidad de la moto constante. Motocicleta: RC2013V. Distancia nula entre el
piñón y el eje del basculante (𝚫𝚫 = 𝝋𝝋). Relación de transmisión (𝝉𝝉 = 𝝋𝝋.𝟑𝟑𝟑𝟑) .........30
Gráfica 6.- Velocidad angular de la rueda bajo la hipótesis de inercia del motor infinita.
Velocidad de la moto constante. Motocicleta: RC2013V. Distancia nula entre el
piñón y el eje del basculante (𝚫𝚫 = 𝝋𝝋). Relación de transmisión (𝝉𝝉 = 𝟏𝟏.𝝋𝝋𝝋𝝋) .........31
Gráfica 7.- Velocidad angular de la rueda en función del tiempo. Inercia del motor infinita. ..37
Gráfica 8.- Velocidad angular de la rueda en función del tiempo. Ambas hipótesis. .............38
Gráfica 9.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad
de la moto constante. Adherencia neumático-suelo infinita. Parámetros de
diseño: RC2013V. Distintos ángulos de diseño (𝝋𝝋𝝋𝝋) del basculante. Inferior:
Fuerza de contacto neumático-suelo en función del tiempo y la geometría. .......44
Gráfica 10.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad
de la moto constante. Adherencia neumático-suelo infinita. Parámetros de
diseño: RC2013V. Distintas longitudes del basculante (𝑳𝑳𝑳𝑳). Inferior: Fuerza de
contacto neumático-suelo en función del tiempo y la geometría. ........................45
Gráfica 11.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad
de la moto constante. Adherencia neumático-suelo infinita. Parámetros de
diseño: RC2013V. Distintas distancias verticales entre el eje del basculante y el
eje del piñón (𝚫𝚫𝒚𝒚). Inferior: Fuerza de contacto neumático-suelo en función del
tiempo. ...............................................................................................................46
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
viii Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 12.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad
de la moto constante. Adherencia neumático-suelo infinita. Parámetros de
diseño: RC2013V. Distintas distancias totales entre el eje del basculante y el eje
del piñón (𝚫𝚫). Inferior: Fuerza de contacto neumático-suelo en función del
tiempo. ...............................................................................................................47
Gráfica 13.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad
de la moto constante. Adherencia neumático-suelo infinita. Parámetros de
diseño: RC2013V. Distintos radios de la corona (𝑹𝑹𝑹𝑹) manteniendo la relación de
transmisión (𝝉𝝉). Inferior: Fuerza de contacto neumático-suelo en función del
tiempo. ...............................................................................................................48
Gráfica 14.- Potencia y par motriz frente a velocidad de giro. Honda CBR 1000RR. Fuente:
www.motousa.com. ............................................................................................50
Gráfica 15.- Par disponible en el piñón motor y fuerza de contacto neumático-suelo en
función del tiempo. Geometría: RC2013V ..........................................................51
Gráfica 16.- % Antisquat frente al ángulo de inclinación del basculante. Motocicleta:
RC2013V. ..........................................................................................................57
Gráfica 17.- Solución gráfica de la ecuación (89.) ................................................................60
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
1 Escuela Politécnica Superior de Jaén. Universidad de Jaén
1. Objetivo del proyecto
Este TFG se ha elaborado para complementar la formación en el Grado de Ingeniería
Mecánica, cursado en la Escuela Politécnica Superior de Jaén, de la Universidad de Jaén.
Se ha elegido como tema del Trabajo de Fin de Grado (TFG, en adelante), una vez
consensuado con el Sr. Tutor, el estudio y análisis del comportamiento que presenta el piñón del
motor de un vehículo motocicleta, cuando esta circula por un terreno irregular; objetivo inicial que se
ha complementado con el análisis de la fuerza de contacto normal entre el neumático y el firme, así
como con una propuesta de diseño de transmisión secundaria de motocicleta.
El motivo de esta elección fue la escasa bibliografía disponible sobre esta temática y su
importancia en el comportamiento integral del vehículo. Situaciones que se pusieron de manifiesto a
lo largo de los estudios desarrollados en esta EPS y, especialmente, durante las actividades que
desarrollé dentro del grupo EPS-UJATEAM 2012-2014 en el que participé.
En consecuencia, pienso que el trabajo que aquí desarrollo, bajo la tutorización del Sr. Mata,
me será de utilidad en mi futura actividad profesional, en tanto en cuanto me ha permitido abordar
una temática de gran interés, plantear varios supuestos prácticos articulados a través del
correspondiente soporte físico-matemático para, combinando los resultados obtenidos, y tras un
análisis de los mismos, conocer el movimiento inducido en el piñón motor originado por las
irregularidades existentes en el terreno.
El resultado de este TFG, planteado a su inicio, ha sido la propuesta de un modelo matemático
que permita diseñar un sistema de transmisión secundario por cadena mejorado.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
2 Escuela Politécnica Superior de Jaén. Universidad de Jaén
2. Alcance
Conforme a lo expuesto brevemente, el alcance que se pretende obtener con este TFG es el
diseño de un sistema de transmisión de potencia optimizado para la competición. Lo que se
complementa con un estudio cinemático de los movimientos parásitos que aparecen en el motor a
causa de las irregularidades en el terreno; análisis que ha sido de utilidad para el objetivo perseguido
en este TFG y que podría ser empleado en otras actividades futuras.
Y como me han enseñado en esta ESPJ, la actividad del ingeniero se traduce en la
aplicabilidad de los conocimientos y experiencias obtenidos, se propone el empleo de los resultados
de este TFG en el diseño y fabricación de la motocicleta destinada a participar en la próxima
convocatoria del concurso Motostudent 2015-2016, en la que nuevamente estará presente el grupo
EPS-UJATEAM.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
3 Escuela Politécnica Superior de Jaén. Universidad de Jaén
3. Motivación
Parte de la justificación de este TFG se localiza en el análisis del comportamiento de la
motocicleta que diseñamos y construimos para participar en la última edición de la competición
Motostudent 2013-2014 (Ilustración 1). Por esta razón, y tras revisar bibliografía, inspeccionar otros
vehículos, y con la ayuda del Tutor, se plantea incluir los resultados de este trabajo en el diseño y
fabricación de la nueva motocicleta, en esta ocasión eléctrica, destinada a participar en la próxima
convocatoria de Motostudent, prevista para octubre de 2016.
Ilustración 1.- Equipo EPS-UJATeam 2012-2014. Alcañiz (Teruel), octubre 2014
La propuesta reposa en una premisa que se persigue en el diseño de una motocicleta: que la
capacidad de modificación de la velocidad sea lo más rápida posible; y esta debe entenderse en una
doble vertiente: longitudinal, cuando se acelera y frena; y transversal, cuando se acomete un giro.
Ahora bien, esta premisa ha de entroncarse dentro de otras más amplias y no obviar parámetros
fundamentales, tales como:
1. Electrónica. Es imprescindible disponer de un control de transmisión electrónico de
potencia que sea fiable en cualquier circunstancia. Desde un adecuado sistema de
baterías que permita el almacenamiento de la energía eléctrica, hasta la entrega de la
potencia mecánica en la rueda motriz; todo ello controlando diferentes aspectos que
permitan un óptimo funcionamiento:
a. Temperatura de los diferentes elementos del sistema mecánico que son
sensibles a este parámetro.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
4 Escuela Politécnica Superior de Jaén. Universidad de Jaén
b. Voltaje de las baterías, garantizando la existencia de una tensión mínima entre
sus bornes.
c. Transformaciones de electricidad
i. AC-DC
ii. Alta tensión – Baja tensión.
d. Aislamiento del sistema eléctrico
2. Integridad estructural. Es imprescindible garantizar la seguridad integral de la
motocicleta y el piloto, conforme con las exigencias planteadas en los procesos de
competición y, en concreto conforme con uno de los objetivos de este TFG: respetar
las condiciones recogidas en el Reglamento de Motostudent 2015-2016 (Moto
Engineering Foundation, Reglamento de la competición Motostudent 2015-2016, 2015).
3. Diseño: la aplicabilidad de los resultados de este TFG en el diseño y fabricación de una
motocicleta eléctrica (Ilustración 2), en concordancia con los requerimientos del
proyecto, exige que se logren los siguientes objetivos:
a. Máxima eficiencia estructural, entendiéndose por ésta la relación entre la
rigidez del chasis y el peso del mismo. La rigidez deberá ser la mínima que
exige el reglamento, con la premisa de que garantice un comportamiento
adecuado durante la conducción.
b. Mínima masa reducida (𝑚𝑚∗), entendiéndose por ésta la masa que tendría un
sistema dinámico que realizase un movimiento de traslación puro y tuviese
asociada la misma energía cinética que el sistema dinámico de la motocicleta
al completo. La expresión matemática es la siguiente (1.):
12
𝑚𝑚∗ 𝑣𝑣2 =12
𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 𝑣𝑣2 + �12
𝐼𝐼𝑖𝑖 𝜔𝜔𝑖𝑖2
𝑖𝑖
(1.)
c. Mínima altura del centro de masas. Con ello se asegurará una aceleración y
frenada máximas; así como un momento de inercia mínimo con respecto al eje
que une los puntos de contacto neumático-suelo de ambas ruedas.
d. Máxima capacidad de transmisión de potencia.
Siendo este último punto (3.d.) el que se abordará en el presente TFG, con objeto de estudiar
cómo afecta la transmisión de potencia del motor a la rueda, cuando se somete el sistema de
suspensión trasero a perturbaciones procedentes de las irregularidades del firme.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
5 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Ilustración 2.- Prototipo de motocicleta eléctrica. Fotografía tomada en Alcañiz (Teruel), octubre de 2014
Indicar, por último dentro de este apartado, que el proyecto de motocicleta eléctrica que se
prevé diseñar y construir para participar en la siguiente convocatoria de Motostudent presenta las
siguientes peculiaridades que lo diferencia de otros anteriores abordados en esta EPSJ. En concreto
las más relevantes son:
1. El motor no puede ser parte estructural del chasis.
2. La geometría dle motor es totalmente diferente a la de un motor de combustión interna
alternativo de una motocicleta convencional (Ilustración 3).
3. Las dimensiones, el régimen de giro, las solicitaciones y el peso del motor condicionan
su disposición en el bastidor.
4. Un notable incremento de los movimientos parásitos que aparecen. Esto se debe a la
geometría del motor, lo que implica que la distancia entre el eje del piñón y el eje del
basculante deba ser como mínimo de 15 cm. Una justificación más de la idoneidad de
este TFG y su posible apliación práctica inmediata.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
6 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Ilustración 3.- Imagen CAD del motor eléctrico. Archivo CAD suministrado por la organización. Cotas generales del motor
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
7 Escuela Politécnica Superior de Jaén. Universidad de Jaén
4. Antecedentes
4.1. Comentarios y presentación
La literatura especializada disponible que aborda este importante aspecto de ingeniería
mecánica no profundiza en él. La mayor parte de las referencias bibliográficas son de índole
cualitativo; identificando, desde un punto de vista histórico-descriptivo, los aportes realizados en
relación con los basculantes y los sistemas de suspensión.
Se cuenta, no obstante, con un texto de referencia, elaborado por Cossalter1, profesor de la
universidad de Padova (Italia), titulado “Motorcycle dynamics”, que se aleja de esta tendencia
generalizada. En el mismo se analiza cuantitativamente este efecto, ofreciendo como resultado un
modelo matemático que ha servido de orientación para el elaborado en este TFG.
4.2. Proyecto Motostudent
4.2.1. Objeto2
La fundación Moto Engineering Foundation y TechnoPark Motorland promueve la competición
Motostudent, un desafío entre equipos universitarios de todo el mundo. Siendo el cometido de los
participantes diseñar, fabricar y evaluar un prototipo de motocicleta de carreras destinado a ser
probado y comprobado en el circuito de Motorland de Aragón (España).
Desde el punto de vista de la competición, tan unido a los avances en materia de investigación
en ingeniería mecánica, se proponen dos categorías:
- Petrol, con un motor 250 cc 4T.
- 100% eléctrico.
Siendo el resultado el diseño y fabricación de motocicletas, en alguna de las dos opciones,
destinadas a competir. Actividad que en palabras de la propia organización, “representa un resto para
los estudiantes.” Y esto lo argumenta al indicar que “éstos deberán demostrar tanto tu creatividad
como su espíritu innovador, aplicando directamente sus aptitudes ingenieriles contra equipos
universitarios de todo el mundo durante un periodo de tres semestres”.
1 COSSALTER, V., (2013) “Motorcycle dynamic”. Editorial Lulu, Padova (Italia) 2 http://www.fundacionmef.org/. Información extractada y traducida por el autor de este TFG

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
8 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Ilustración 4.- Logo de la competición Motostudent Electric.
4.2.2. Fases.
Identificado el proyecto y puesta de relevancia la importancia de la participación activa de los
alumnos de las Escuelas de Ingeniería en las diferentes etapas del mismo, se expondrá a
continuación las fases previstas:
1. La primera fase se centra en la realización de las verificaciones previas. El prototipo
será sometido a una serie de pruebas estáticas y dinámicas, además de a
inspecciones visuales por parte de pilotos y periodistas (Ilustración 5).
2. La segunda fase se denomina MS1. Consiste en la elaboración de dos proyectos: el
primero se muestra y explica el diseño de la motocicleta; y el segundo se centra en una
propuesta destinada a la producción en serie del vehículo diseñado. Ambos proyectos
se exponen y defienden ante un tribunal especializado que se encarga de su
evaluación. (Ilustración 6).
3. La tercera fase se conoce como MS2. Es la parte más interesante de la compeción, a
juicio de muchos de los participante, ya que consiste en la validación experimental de
los prototipos fabricados, inspeccionando el comportamiento del vehículo en carretera.
Para ello, se realizan diferentes pruebas: aceleración y frenada máximas, zig-zag,
montaje y desmontaje de parte de la moto, etc. Concluyendo con una final: una carrera
en el circuito de velocidad, que se celebra el último día de la competición (Ilustración
7).

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
9 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Ilustración 5.- Prototipo MT PRO 02 siendo sometido a las verificaciones técnicas. Alcañiz (Teruel), octubre 2014.
Ilustración 6.- Prototipo MT PRO 02 siendo sometido a las pruebas dinámicas. Alcañiz (Teruel), octubre 2014
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
10 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Ilustración 7.- Prototipo MT PRO 02 antes de la carrera. Alcañiz (Teruel), octubre 2014
4.2.3. Reglamentación y normativa: Sistema de transmisión
Detallado y extenso, puede consultarse en la página web indicada3. A los efectos de este TFG
la normativa seleccionada se concentra en la referente a los sistemas de transmisión; aunque,
obviamente, el resto de la misma se ha estudiado y este trabajo se adapta a las exigencias en ella
manifestada.
Recogido en el artículo 11, el sistema de transmisión empleado para la categoría “Motostudent
electric” es de configuración libre, detallándose los siguientes aspectos (Tabla 1).
Tabla 1.- Reglamentación en materia de transmisión establecida por Motostudent.
ARTÍCULO 11: TRANSMISIÓN
D.11.1 Tipos de transmisión El sistema de transmisión empleado para la categoría “MotoStudent Electric” es de
configuración libre.
D.11.1.1 Se permite cualquier tipo de sistema de transmisión primaria: caja de cambios,
variador CVT, etc.
D.11.1.2 Se permite la transmisión directa entre el eje de salida del motor y la rueda trasera
3 http://www.motostudent.com/
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
11 Escuela Politécnica Superior de Jaén. Universidad de Jaén
D.11.1.3 No hay limitaciones en cuanto a la instalación de elementos de embrague entre
componentes del sistema de transmisión
D.11.2 Transmisión secundaria
D.11.2.1 No hay limitación en cuanto al tipo de transmisión utilizado: por cadena, correa, etc.
D.11.2.2 Cualquier elemento de la transmisión susceptible de posibles atrapamientos para el
piloto deberá ir cubierto con una carcasa rígida
4.2.4. Nomenclatura
En este apartado se recogen las diferentes magnitudes y símbolos que la representan, que van
a ser utilizados en este TFG, respentando la nomenclatura empleada en la literatura especializada.
a. Alfabeto griego
Alfa 𝛼𝛼 ≡ Aceleración angular. Beta 𝛽𝛽 ≡ Ángulo que forma la línea que une un punto arbitrario de la corona y el eje de la
misma con la vertical. Gamma 𝛾𝛾 ≡ Ángulo que forma la línea que une los ejes del piñón y el basculante con el propio
basculante. Delta 𝛿𝛿 ≡ Ángulo que forma la línea que une los ejes del piñón y la corona con el tramo
superior de la cadena. 𝛥𝛥 ≡ Incremento. Decalaje entre el eje del piñón y el del basculante.
Eta 𝜂𝜂 ≡ Ángulo de inclinación del tramo superior de la cadena. Theta 𝜃𝜃 ≡ Ángulo de inclinación del firme en el 𝑃𝑃.𝐶𝐶.
Kappa 𝜅𝜅 ≡ Ángulo que forma la línea que une un punto arbitrario del piñón y el eje del mismo con la vertical.
Lambda 𝜆𝜆 ≡ Longitud de onda. Mu 𝜇𝜇 ≡ Coeficiente de rozamiento. Xi 𝜉𝜉 ≡ Ángulo que forma la línea que une los ejes del piñón y la corona con el basculante. Pi 𝜋𝜋 ≡ Constante universal. 𝜋𝜋 ≈ 3.141592 …
Rho 𝜌𝜌 ≡ Radio. Inverso de la curvatura. Sigma 𝜎𝜎 ≡ Ángulo que forma la línea que une el eje del basculante con el eje del piñón.
Tau 𝜏𝜏 ≡ Relación de transmisión. Phi 𝜑𝜑 ≡ Ángulo de inclinación del basculante.
Omega 𝜔𝜔 ≡ Velocidad angular. 𝛺𝛺 ≡ Velocidad angular.
b. Alfabeto latino
𝐴𝐴 ≡ Amplitud 𝐷𝐷 ≡ Diámetro 𝑑𝑑 ≡ Operador diferencial 𝑒𝑒 ≡ Separación entre ejes del piñón y la corona 𝐹𝐹 ≡ Fuerza 𝐼𝐼 ≡ Momento de inercia 𝑅𝑅 ≡ Radio 𝑇𝑇 ≡ Par mecánico, Periodo 𝑣𝑣 ≡ Velocidad lineal

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
12 Escuela Politécnica Superior de Jaén. Universidad de Jaén
c. Subíndices
𝐵𝐵 ≡ Basculante 𝐶𝐶 ≡ Corona 𝐶𝐶𝐶𝐶𝑑𝑑 ≡ Cadena 𝐶𝐶ℎ𝐶𝐶 ≡ Chasis 𝑃𝑃 ≡ Piñón 𝑃𝑃.𝐶𝐶. ≡ Punto de contacto 𝑅𝑅 ≡ Rueda 𝑥𝑥 ≡ Relacionado con el eje 𝑥𝑥 𝑦𝑦 ≡ Relacionado con el eje 𝑦𝑦 𝑧𝑧 ≡ Relacionado con el eje 𝑧𝑧
d. Otros
𝜇𝜇𝐸𝐸 ≡ Coeficiente de rozamiento estático 𝜇𝜇𝐷𝐷 ≡ Coeficiente de rozamiento dinámico 𝐶𝐶𝐼𝐼𝑅𝑅 ≡ Centro Instantáneo de Rotación 𝑐𝑐.𝑑𝑑.𝑔𝑔. ≡ Centro De Gravedad 𝑐𝑐.𝑚𝑚. ≡ Centro de Masas
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
13 Escuela Politécnica Superior de Jaén. Universidad de Jaén
5. Cinemática de los elementos de la transmisión secundaria
En este apartado se estudian los denominados movimientos parásitos que aparecen en el
motor cuando la motocicleta circula por un firme irregular, manteniendo constante la velocidad lineal.
Tal y como ya se ha expuesto, el análisis de estos movimientos es fundamental en el diseño de la
transmisión secundaria. El motivo es doble, pues pueden presentar un comportamiento beneficioso o
perjudicial en la transmisión de potencia, con lo que incidirán sustancialmente en los resultados
finales del proceso.
Para el estudio de estos movimientos, se procederá de acuerdo a la siguiente secuencia:
1. Se definen los parámetros que intervienen en el estudio. Estos se pueden agrupar en
dos bloques: parámetros de diseño y parámetros externos.
2. Se propone un perfil de terreno senoidal, y se determina la posición del sistema de
transmisión en función del tiempo al avanzar la moto sobre el firme.
3. Conocida la posición del sistema, y bajo las hipótesis:
a. el punto de contacto suelo-neumático es infinitamente pequeño,
b. la adherencia entre estos dos elementos es infinita, y
c. la moto se deplaza a velocidad constante y horizontal sobre el terreno,
se determina la velocidad angular instantánea de la rueda, en función del tiempo y de
la posición.
4. En analogía con el punto anterior, se sustituye la hipótesis “adherencia neumático-
suelo infinita” por la siguiente, en la que se considera que el motor está bloqueado,
determinando la velocidad angular instantánea de la rueda, en función del tiempo y de
la posición.
5. Conocidos los dos movimientos anteriores, y las ecuaciones que los gobiernan, se
propone un modelo matemático que bajo las hipótesis del punto 3, permite conocer la
velocidad angular instantánea a la que rota el piñón del motor. Derivando esta
expresión con respecto al tiempo, se determina la aceleración angular a la que estaría
sometido el piñón del motor si la moto se desplazase sobre el terreno estudiado,
manteniéndose la velocidad de desplazamiento de la moto constante y horizontal.
6. Analizada la cinemática del sistema descrito se estudia, a continuación, el aspecto
dinámico del mismo. Conocidos los parámetros de diseño del sistema de suspensión,
y determinada también la posición de la rueda en cada instante, se puede estimar la
fuerza de contacto suelo-neumático en función del tiempo.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
14 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7. Por último, se analiza el resultado del estudio, comparando las aceleraciones
angulares que aparecen en el piñón del motor frente a la fuerza de contacto entre el
suelo y el neumático.
8. Redacción de las conclusiones del presente estudio.
El diseño del tren trasero de una motocicleta, compuesto fundamentalmente por el sistema de
suspensión y de transmisión, no se puede concebir sin un análisis del efecto squat. Esto ha motivado
a que se incluya información al respecto en el Anejo 1: Squat, ángulo de squat y antisquat,
documentación complementaria donde se desarrolla dicho efecto.
5.1. Introducción. Parámetros que intervienen
Se distinguen dos tipos de parámetros: de diseño y externos. Los primeros son susceptibles de
ser modificados; mientras que los segundos se estiman, y vienen impuestos por las condiciones
externas.
Parámetros de diseño:
1. Longitud del basculante (𝐿𝐿𝐵𝐵).
2. Ángulo de reposo del basculante (𝜑𝜑0).
3. Radio de la rueda trasera (𝑅𝑅𝑅𝑅).
4. Radio de la corona (𝑅𝑅𝐶𝐶).
5. Radio del piñón (𝑅𝑅𝑃𝑃).
6. Distancia horizontal entre el eje del basculante y el eje del piñón (Δ𝑥𝑥).
7. Distancia vertical entre el eje del basculante y el eje del piñón (Δ𝑦𝑦).
Parámetros externos:
8. Amplitud de la irregularidad (𝐴𝐴).
9. Longitud de onda de la irregularidad (𝜆𝜆).
10. Velocidad lineal de la motocicleta (𝑣𝑣).
5.2. Firme. Perfil senoidal
En el presente TFG se parte de la hipótesis de que el perfil del terreno viene determinado por
una función seoindal del tipo (2.):
𝑦𝑦 (𝑥𝑥) = 𝐴𝐴 sin(𝑘𝑘 𝑥𝑥) (2.)
𝐴𝐴 ≡ Amplitud de la onda (𝑚𝑚).
𝑘𝑘 ≡ Número de ondas �𝑟𝑟𝐶𝐶𝑑𝑑 𝑚𝑚� �.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
15 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Se supone también que la moto está fija, y el que experimenta movimiento es el suelo. De esta
manera, el perfil del terreno se deplazará como si de una onda armónica se tratase. Puede, por lo
tanto, expresarse el perfil del terreno en función de la coordenada 𝑥𝑥 y del tiempo 𝑡𝑡: (3.)
𝑦𝑦 (𝑥𝑥, 𝑡𝑡) = 𝐴𝐴 sin(𝑘𝑘 𝑥𝑥 − 𝜔𝜔𝑡𝑡 + 𝜙𝜙) (3.)
Donde:
𝐴𝐴 ≡ Amplitud de la onda (𝑚𝑚).
𝑘𝑘 ≡ Número de ondas �𝑟𝑟𝐶𝐶𝑑𝑑 𝑚𝑚� �.
𝜔𝜔 ≡ Frecuencia angular �𝑟𝑟𝐶𝐶𝑑𝑑 𝑠𝑠� �.
𝜙𝜙 ≡ Desfase (𝑟𝑟𝐶𝐶𝑑𝑑). (En este estudio, 𝜙𝜙 = 0).
La frecuencia angular y el número de ondas están relacionados mediantes las expresiones (4.)
y (5.):
𝑘𝑘 =2 𝜋𝜋𝜆𝜆
𝜔𝜔 =2 𝜋𝜋𝑇𝑇
(4.)
𝑣𝑣 =𝜆𝜆𝑇𝑇
=𝜔𝜔𝑘𝑘
(5.)
Donde:
𝜆𝜆 ≡ Longitud de onda (𝑚𝑚).
𝑇𝑇 ≡ Periodo (𝑠𝑠).
𝑣𝑣 ≡ Velocidad de propagación (𝑚𝑚 𝑠𝑠⁄ ).
De modo que se puede reescribir la ecuación (3.), que quedaría conforme con la siguiente
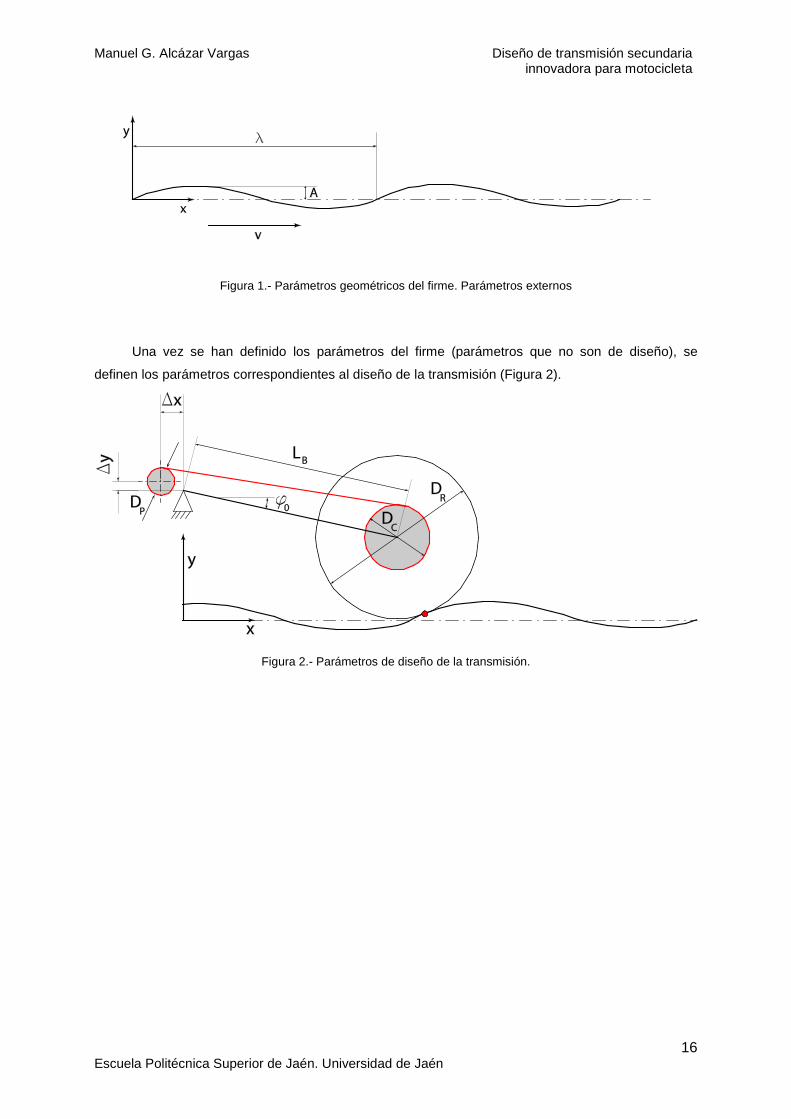
expresión (6.), que encuentra su representación gráfica en la Figura 1:
𝑦𝑦 (𝑥𝑥, 𝑡𝑡) = 𝐴𝐴 sin �2𝜋𝜋𝜆𝜆
(𝑥𝑥 − 𝑣𝑣 𝑡𝑡)� (6.)
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
16 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Figura 1.- Parámetros geométricos del firme. Parámetros externos
Una vez se han definido los parámetros del firme (parámetros que no son de diseño), se
definen los parámetros correspondientes al diseño de la transmisión (Figura 2).
Figura 2.- Parámetros de diseño de la transmisión.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
17 Escuela Politécnica Superior de Jaén. Universidad de Jaén
5.3. Hipótesis #1.- Adherencia neumático-firme infinita
En este apartado se estudia el movimiento al que estaría sometida la rueda al desplazarse esta
sobre el firme descrito en el apartado 5.2, partiendo de la hipótesis de que la adherencia entre el
suelo y el neumático es infinita (𝜇𝜇 → ∞). Los datos que se conocen son los parámetros de diseño
mencionados en el apartado anterior; así como la geometría del firme y la velocidad lineal de la moto.
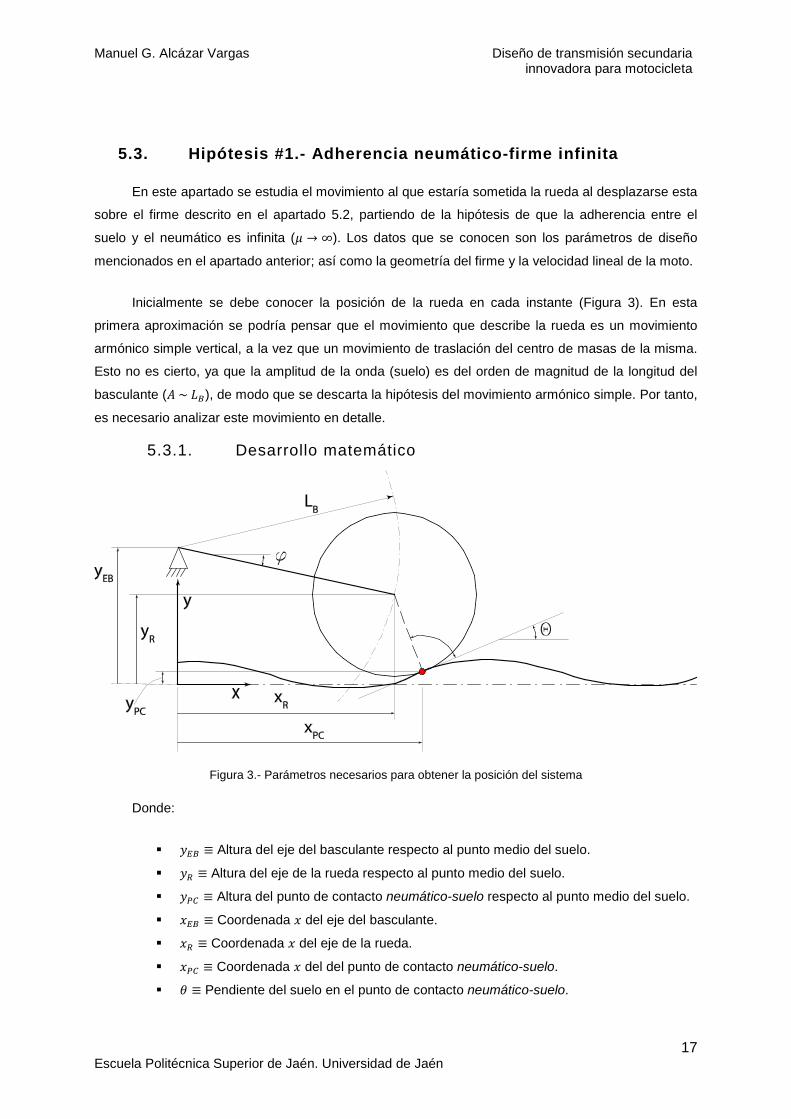
Inicialmente se debe conocer la posición de la rueda en cada instante (Figura 3). En esta
primera aproximación se podría pensar que el movimiento que describe la rueda es un movimiento
armónico simple vertical, a la vez que un movimiento de traslación del centro de masas de la misma.
Esto no es cierto, ya que la amplitud de la onda (suelo) es del orden de magnitud de la longitud del
basculante (𝐴𝐴 ~ 𝐿𝐿𝐵𝐵), de modo que se descarta la hipótesis del movimiento armónico simple. Por tanto,
es necesario analizar este movimiento en detalle.
5.3.1. Desarrollo matemático
Figura 3.- Parámetros necesarios para obtener la posición del sistema
Donde:
𝑦𝑦𝐸𝐸𝐵𝐵 ≡ Altura del eje del basculante respecto al punto medio del suelo.
𝑦𝑦𝑅𝑅 ≡ Altura del eje de la rueda respecto al punto medio del suelo.
𝑦𝑦𝑃𝑃𝐶𝐶 ≡ Altura del punto de contacto neumático-suelo respecto al punto medio del suelo.
𝑥𝑥𝐸𝐸𝐵𝐵 ≡ Coordenada 𝑥𝑥 del eje del basculante.
𝑥𝑥𝑅𝑅 ≡ Coordenada 𝑥𝑥 del eje de la rueda.
𝑥𝑥𝑃𝑃𝐶𝐶 ≡ Coordenada 𝑥𝑥 del del punto de contacto neumático-suelo.
𝜃𝜃 ≡ Pendiente del suelo en el punto de contacto neumático-suelo.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
18 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Suponiendo que las irregularidades del terreno son grandes (𝜆𝜆 → ∞), y que la amplitud de los
baches es pequeña en comparación con el tamaño de la rueda � 𝐴𝐴𝑅𝑅𝑅𝑅≪ 1�, se cumple la condición de
que la curvatura de rueda es siempre mayor que la curvatura del suelo. En base a lo que se dará la
situación mostrada en la Figura 4 (a), que presenta solución única, en contraposición con la situación
mostrada en la Figura 4 (b).
Figura 4.- Relación entre radios de curvatura que pueden presentar el neumático y el suelo
La situación límite será aquella en la que los radios de curvatura sean idénticos. Apoyándose
en las expresiones matemáticas siguientes (7.) a (12.) se obtendrá la expresión (13.):
𝜌𝜌𝑅𝑅 ≤ 𝜌𝜌𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑚𝑚 (7.)
𝜌𝜌𝑅𝑅 = 𝑅𝑅𝑅𝑅 (8.)
1𝜌𝜌𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑚𝑚
=𝑑𝑑2𝑦𝑦𝑑𝑑𝑥𝑥2
=𝑑𝑑2
𝑑𝑑𝑥𝑥2(𝐴𝐴 sin(𝑘𝑘 𝑥𝑥 − 𝜔𝜔𝑡𝑡 + 𝜙𝜙)) (9.)
1𝜌𝜌𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑚𝑚
= −�2 𝜋𝜋𝜆𝜆�2
𝐴𝐴 sin �2 𝜋𝜋𝜆𝜆𝑥𝑥 − 𝜔𝜔𝑡𝑡 + 𝜙𝜙� ≤ �
2 𝜋𝜋𝜆𝜆�2
𝐴𝐴 (10.)
Por lo que:
1𝜌𝜌𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟
= −�2 𝜋𝜋𝜆𝜆�2
𝐴𝐴 sin �2 𝜋𝜋𝜆𝜆𝑥𝑥 − 𝜔𝜔𝑡𝑡 + 𝜙𝜙� ≤ �
2 𝜋𝜋𝜆𝜆�2
𝐴𝐴 (11.)
𝜆𝜆 ≥ 2 𝜋𝜋�𝐴𝐴 𝜌𝜌𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟 (12.)
Siendo la situación límite la siguiente (13.):
𝜆𝜆 ≥ 2 𝜋𝜋�𝐴𝐴 𝑅𝑅𝑅𝑅 (13.)
A continuación se determina la posición del sistema formado por el conjunto suelo-basculante-
rueda. Para ello se plantea el siguiente sistema de ecuaciones:
1. Es sabido que el eje de la rueda describe una trayectoria circular con centro en el eje del
basculante, por lo que se puede establecer (14.):
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
19 Escuela Politécnica Superior de Jaén. Universidad de Jaén
(𝑥𝑥𝑅𝑅 − 𝑥𝑥𝐸𝐸𝐵𝐵)2 + (𝑦𝑦𝑅𝑅 − 𝑦𝑦𝐸𝐸𝐵𝐵)2 = 𝐿𝐿𝐵𝐵2 (14.)
2. Se conoce que la coordenada 𝑦𝑦 del punto de contacto es función de la coordenada 𝑥𝑥 del
mismo, a través de la ecuación de la onda armónica (15.):
𝑦𝑦𝑃𝑃𝐶𝐶 = 𝐴𝐴 𝑠𝑠𝑒𝑒𝑠𝑠 �2𝜋𝜋𝜆𝜆
(𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑣𝑣 𝑡𝑡) + 𝜙𝜙� (15.)
3. Puesto que es conocida la función ‘suelo’, podemos derivarla para obtener la pendiente del
éste en el punto de contacto (16.):
tan 𝜃𝜃 =𝑑𝑑𝑑𝑑𝑥𝑥
�𝐴𝐴 𝑠𝑠𝑒𝑒𝑠𝑠 �2𝜋𝜋𝜆𝜆
(𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑣𝑣 𝑡𝑡) + 𝜙𝜙��
tan𝜃𝜃 = 𝐴𝐴 2𝜋𝜋𝜆𝜆
𝑐𝑐𝑐𝑐𝑠𝑠 �2𝜋𝜋𝜆𝜆
(𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑣𝑣 𝑡𝑡) + 𝜙𝜙�
(16.)
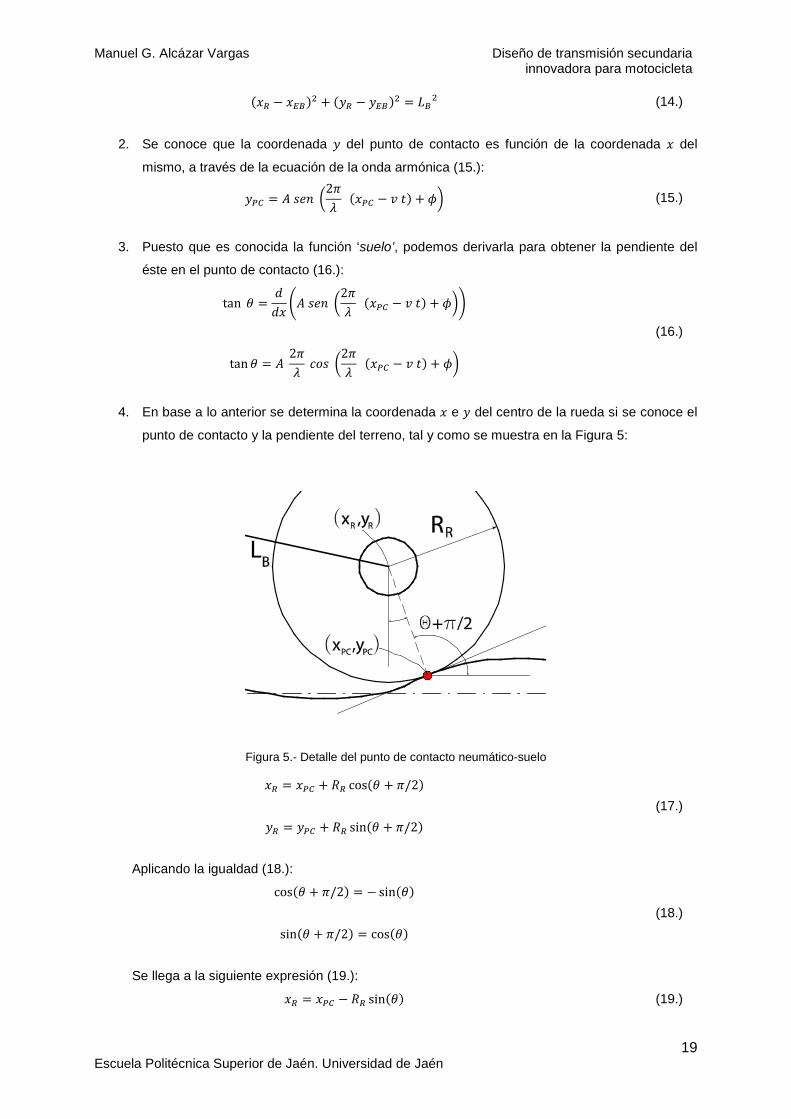
4. En base a lo anterior se determina la coordenada 𝑥𝑥 e 𝑦𝑦 del centro de la rueda si se conoce el
punto de contacto y la pendiente del terreno, tal y como se muestra en la Figura 5:
Figura 5.- Detalle del punto de contacto neumático-suelo
𝑥𝑥𝑅𝑅 = 𝑥𝑥𝑃𝑃𝐶𝐶 + 𝑅𝑅𝑅𝑅 cos(𝜃𝜃 + 𝜋𝜋/2)
𝑦𝑦𝑅𝑅 = 𝑦𝑦𝑃𝑃𝐶𝐶 + 𝑅𝑅𝑅𝑅 sin(𝜃𝜃 + 𝜋𝜋/2) (17.)
Aplicando la igualdad (18.):
cos(𝜃𝜃 + 𝜋𝜋/2) = − sin(𝜃𝜃)
sin(𝜃𝜃 + 𝜋𝜋/2) = cos(𝜃𝜃) (18.)
Se llega a la siguiente expresión (19.):
𝑥𝑥𝑅𝑅 = 𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑅𝑅𝑅𝑅 sin(𝜃𝜃) (19.)

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
20 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝑦𝑦𝑅𝑅 = 𝑦𝑦𝑃𝑃𝐶𝐶 + 𝑅𝑅𝑅𝑅 cos(𝜃𝜃)
Agrupando estas ecuaciones en un sistema (20.):
⎩⎪⎪⎨
⎪⎪⎧ (𝑥𝑥𝑅𝑅 − 𝑥𝑥𝐸𝐸𝐵𝐵)2 + (𝑦𝑦𝑅𝑅 − 𝑦𝑦𝐸𝐸𝐵𝐵)2 = 𝐿𝐿𝐵𝐵2
𝑦𝑦𝑃𝑃𝐶𝐶 = 𝐴𝐴 𝑠𝑠𝑒𝑒𝑠𝑠 �2𝜋𝜋𝜆𝜆
(𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑣𝑣 𝑡𝑡) + 𝜙𝜙�
tan𝜃𝜃 = 𝐴𝐴 2𝜋𝜋𝜆𝜆
𝑐𝑐𝑐𝑐𝑠𝑠 �2𝜋𝜋𝜆𝜆
(𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑣𝑣 𝑡𝑡) + 𝜙𝜙�
𝑥𝑥𝑅𝑅 = 𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑅𝑅𝑅𝑅 sin(𝜃𝜃)𝑦𝑦𝑅𝑅 = 𝑦𝑦𝑃𝑃𝐶𝐶 + 𝑅𝑅𝑅𝑅 cos (𝜃𝜃) ⎭
⎪⎪⎬
⎪⎪⎫
(20.)
Que es posible simplificar ligeramente si se establecen las siguientes premisas de trabajo:
1. Puesto que se puede asegurar que la coordenada 𝑥𝑥 del punto de contacto (𝑥𝑥𝑃𝑃𝐶𝐶) es superior a
la coordenada 𝑥𝑥 del eje del basculante (𝑥𝑥𝐵𝐵), la ecuación (14.) queda:
𝑥𝑥𝑅𝑅 = 𝑥𝑥𝐸𝐸𝐵𝐵 + �𝐿𝐿𝐵𝐵2 − (𝑦𝑦𝑅𝑅 − 𝑦𝑦𝐸𝐸𝐵𝐵)2 (21.)
2. Estableciendo como incógnita tan 𝜃𝜃 en vez de 𝜃𝜃, y aplicando las relaciones trigonométricas
siguientes (22.):
sin�arctan�𝑓𝑓 (𝑥𝑥)�� =𝑓𝑓 (𝑥𝑥)
�1 + 𝑓𝑓2 (𝑥𝑥)
cos�arctan�𝑓𝑓 (𝑥𝑥)�� =1
�1 + 𝑓𝑓2 (𝑥𝑥)
(22.)
3. La ecuación (19.) se puede escribir de la forma (23.):
𝑥𝑥𝑅𝑅 = 𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑅𝑅𝑅𝑅tan𝜃𝜃
�1 + 𝑡𝑡𝐶𝐶𝑠𝑠2 (𝜑𝜑)
𝑦𝑦𝑅𝑅 = 𝑦𝑦𝑃𝑃𝐶𝐶 + 𝑅𝑅𝑅𝑅1
�1 + 𝑡𝑡𝐶𝐶𝑠𝑠2 (𝜑𝜑)
(23.)
4. De modo que el sistema de ecuaciones planteado anteriormente se transforma en (24.):
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
21 Escuela Politécnica Superior de Jaén. Universidad de Jaén
⎩⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎧ 𝑥𝑥𝑅𝑅 = 𝑥𝑥𝐸𝐸𝐵𝐵 + �𝐿𝐿𝐵𝐵2 − (𝑦𝑦𝑅𝑅 − 𝑦𝑦𝐸𝐸𝐵𝐵)2
𝑦𝑦𝑃𝑃𝐶𝐶 = 𝐴𝐴 𝑠𝑠𝑒𝑒𝑠𝑠 �2𝜋𝜋𝜆𝜆
(𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑣𝑣 𝑡𝑡) + 𝜙𝜙�
tan𝜃𝜃 = 𝐴𝐴 2𝜋𝜋𝜆𝜆
𝑐𝑐𝑐𝑐𝑠𝑠 �2𝜋𝜋𝜆𝜆
(𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑣𝑣 𝑡𝑡) + 𝜙𝜙�
𝑥𝑥𝑅𝑅 = 𝑥𝑥𝑃𝑃𝐶𝐶 − 𝑅𝑅𝑅𝑅tan𝜃𝜃
�1 + 𝑡𝑡𝐶𝐶𝑠𝑠2 (𝜃𝜃)
𝑦𝑦𝑅𝑅 = 𝑦𝑦𝑃𝑃𝐶𝐶 + 𝑅𝑅𝑅𝑅1
�1 + 𝑡𝑡𝐶𝐶𝑠𝑠2 (𝜃𝜃) ⎭⎪⎪⎪⎪⎬
⎪⎪⎪⎪⎫
(24.)
Este sistema de cinco ecuaciones no lineales tiene cinco incógnitas {𝑥𝑥𝑃𝑃𝐶𝐶 ,𝑦𝑦𝑃𝑃𝐶𝐶 , 𝑥𝑥𝑅𝑅 ,𝑦𝑦𝑅𝑅 , tan𝜃𝜃} y un
parámetro del que dependen todas ellas: 𝑡𝑡
Con objeto de buscar la máxima aplicabilidad a este TFG, utilizando datos y modelos de
referencia pero difícilmente accesibles, se aprovechó la ocasión en la que se expuso en Jaén la
motocicleta, marca Honda (Ilustración 8), que ganó el campeonado del mundo de MotoGP, pilotada
por Marc Marquez en el año 2013 (RC2013V), para recopilar los siguientes parámetros directamente
del vehículo (Ilustración 9).
Ilustración 8.- Fotografía de perfil del prototipo RC2013V. Jaén, diciembre 2014
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
22 Escuela Politécnica Superior de Jaén. Universidad de Jaén
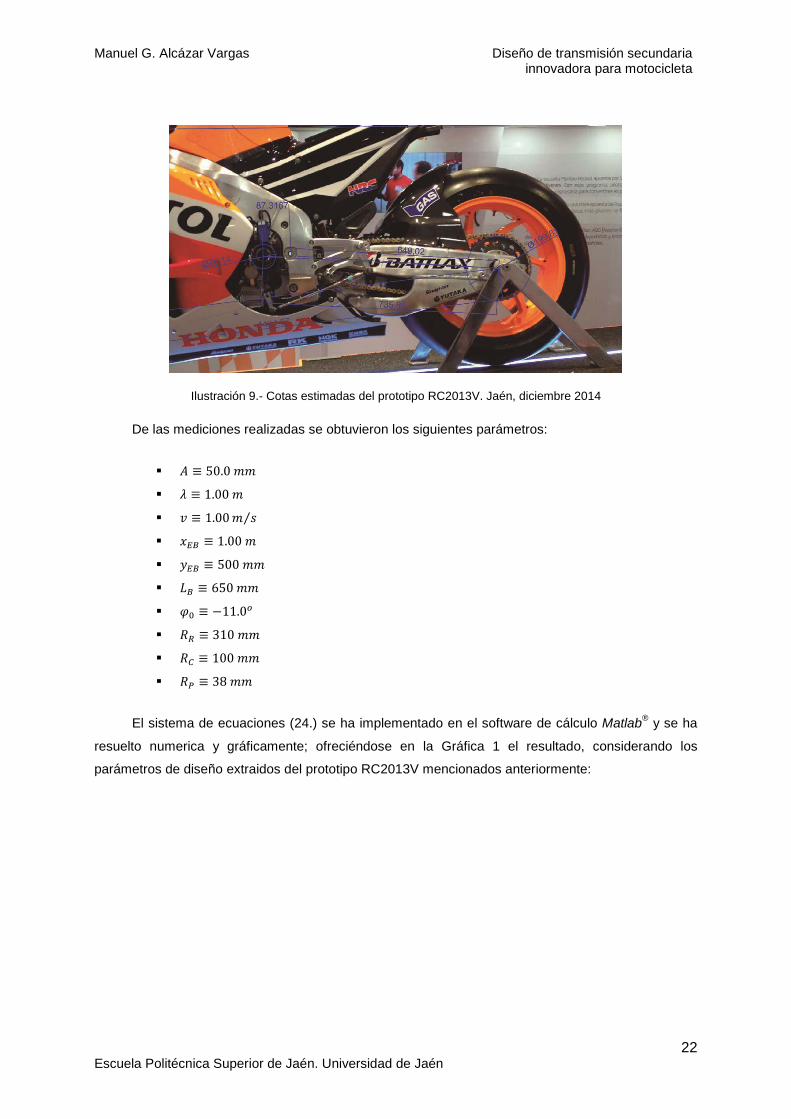
Ilustración 9.- Cotas estimadas del prototipo RC2013V. Jaén, diciembre 2014
De las mediciones realizadas se obtuvieron los siguientes parámetros:
𝐴𝐴 ≡ 50.0 𝑚𝑚𝑚𝑚
𝜆𝜆 ≡ 1.00 𝑚𝑚
𝑣𝑣 ≡ 1.00𝑚𝑚 𝑠𝑠⁄
𝑥𝑥𝐸𝐸𝐵𝐵 ≡ 1.00 𝑚𝑚
𝑦𝑦𝐸𝐸𝐵𝐵 ≡ 500 𝑚𝑚𝑚𝑚
𝐿𝐿𝐵𝐵 ≡ 650 𝑚𝑚𝑚𝑚
𝜑𝜑0 ≡ −11.0𝑚𝑚
𝑅𝑅𝑅𝑅 ≡ 310 𝑚𝑚𝑚𝑚
𝑅𝑅𝐶𝐶 ≡ 100 𝑚𝑚𝑚𝑚
𝑅𝑅𝑃𝑃 ≡ 38 𝑚𝑚𝑚𝑚
El sistema de ecuaciones (24.) se ha implementado en el software de cálculo Matlab® y se ha
resuelto numerica y gráficamente; ofreciéndose en la Gráfica 1 el resultado, considerando los
parámetros de diseño extraidos del prototipo RC2013V mencionados anteriormente:
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
23 Escuela Politécnica Superior de Jaén. Universidad de Jaén
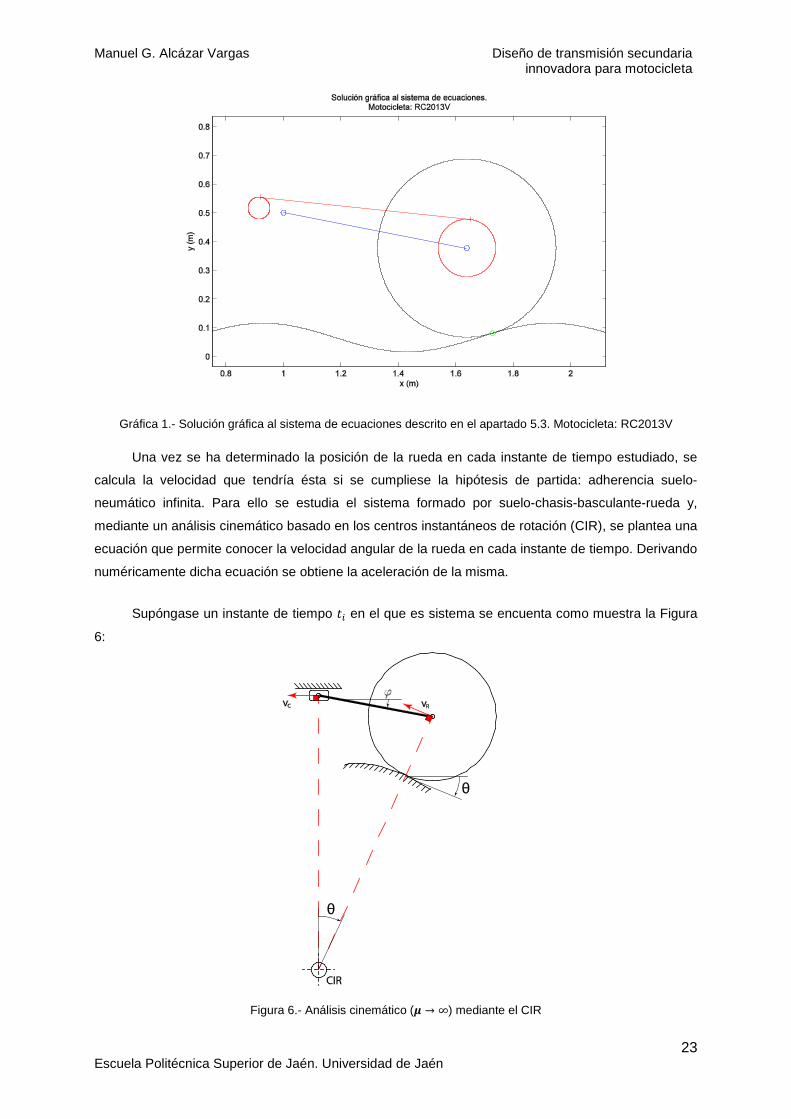
Gráfica 1.- Solución gráfica al sistema de ecuaciones descrito en el apartado 5.3. Motocicleta: RC2013V
Una vez se ha determinado la posición de la rueda en cada instante de tiempo estudiado, se
calcula la velocidad que tendría ésta si se cumpliese la hipótesis de partida: adherencia suelo-
neumático infinita. Para ello se estudia el sistema formado por suelo-chasis-basculante-rueda y,
mediante un análisis cinemático basado en los centros instantáneos de rotación (CIR), se plantea una
ecuación que permite conocer la velocidad angular de la rueda en cada instante de tiempo. Derivando
numéricamente dicha ecuación se obtiene la aceleración de la misma.
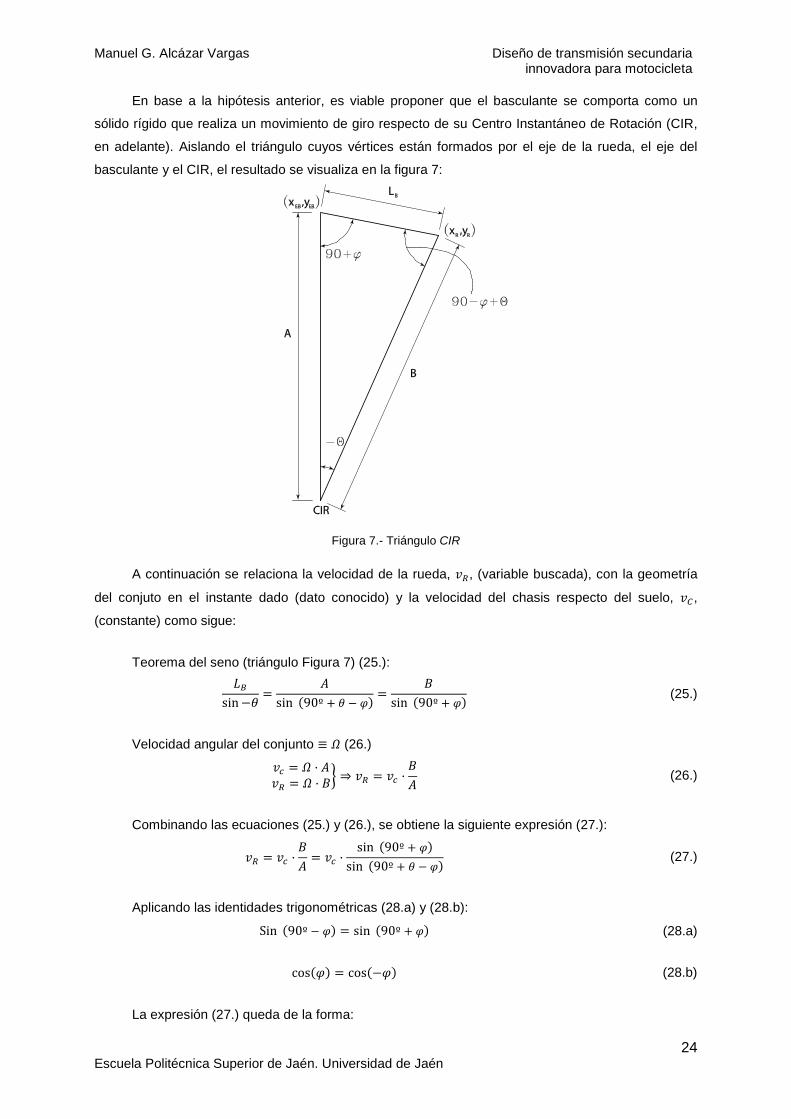
Supóngase un instante de tiempo 𝑡𝑡𝑖𝑖 en el que es sistema se encuenta como muestra la Figura
6:
Figura 6.- Análisis cinemático (𝝁𝝁 → ∞) mediante el CIR
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
24 Escuela Politécnica Superior de Jaén. Universidad de Jaén
En base a la hipótesis anterior, es viable proponer que el basculante se comporta como un
sólido rígido que realiza un movimiento de giro respecto de su Centro Instantáneo de Rotación (CIR,
en adelante). Aislando el triángulo cuyos vértices están formados por el eje de la rueda, el eje del
basculante y el CIR, el resultado se visualiza en la figura 7:
Figura 7.- Triángulo CIR
A continuación se relaciona la velocidad de la rueda, 𝑣𝑣𝑅𝑅, (variable buscada), con la geometría
del conjuto en el instante dado (dato conocido) y la velocidad del chasis respecto del suelo, 𝑣𝑣𝐶𝐶,
(constante) como sigue:
Teorema del seno (triángulo Figura 7) (25.): 𝐿𝐿𝐵𝐵
sin−𝜃𝜃=
𝐴𝐴sin (90º + 𝜃𝜃 − 𝜑𝜑) =
𝐵𝐵sin (90º + 𝜑𝜑) (25.)
Velocidad angular del conjunto ≡ 𝛺𝛺 (26.)
𝑣𝑣𝑐𝑐 = 𝛺𝛺 · 𝐴𝐴𝑣𝑣𝑅𝑅 = 𝛺𝛺 · 𝐵𝐵� ⇒ 𝑣𝑣𝑅𝑅 = 𝑣𝑣𝑐𝑐 ·
𝐵𝐵𝐴𝐴
(26.)
Combinando las ecuaciones (25.) y (26.), se obtiene la siguiente expresión (27.):
𝑣𝑣𝑅𝑅 = 𝑣𝑣𝑐𝑐 ·𝐵𝐵𝐴𝐴
= 𝑣𝑣𝑐𝑐 ·sin (90º + 𝜑𝜑)
sin (90º + 𝜃𝜃 − 𝜑𝜑) (27.)
Aplicando las identidades trigonométricas (28.a) y (28.b):
Sin (90º − 𝜑𝜑) = sin (90º + 𝜑𝜑)
cos(𝜑𝜑) = cos(−𝜑𝜑)
(28.a)
(28.b)
La expresión (27.) queda de la forma:

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
25 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝑣𝑣𝑅𝑅 = 𝑣𝑣𝑐𝑐 ·cos𝜑𝜑
cos(𝜑𝜑 − 𝜃𝜃) (29.)
Puesto que no existe deslizamiento entre neumático y firme la velocidad de rotación de la
rueda (𝜔𝜔𝑅𝑅) viene determinada por la ecuación (30.):
𝜔𝜔𝑅𝑅 =𝑣𝑣𝑅𝑅𝑅𝑅𝑅𝑅
=𝑣𝑣𝑐𝑐𝑅𝑅𝑅𝑅
·cos𝜑𝜑
cos(𝜑𝜑 − 𝜃𝜃) (30.)
Si se emplea un método de derivación numérico de dos puntos centrado, con el objeto de
minimizar el error de truncación local (L.T.E., en adelante) y mejorar la precisión del método, se
obtiene:
𝛼𝛼𝑅𝑅𝑖𝑖 =𝑣𝑣𝑐𝑐
𝑅𝑅𝑅𝑅 2 𝑘𝑘· �
cos (𝜑𝜑𝑖𝑖+1)cos (𝜑𝜑𝑖𝑖+1 − 𝜃𝜃𝑖𝑖+1) −
cos (𝜑𝜑𝑖𝑖−1)cos (𝜑𝜑𝑖𝑖−1 − 𝜃𝜃𝑖𝑖−1)� (↺) (31.)
Donde 𝑘𝑘 es el paso de tiempo.
Empleando la ecuación (30.), y representando la velocidad de la rueda frente al tiempo, el
resultado se plasma en la Gráfica 2
Gráfica 2.- Velocidad angular de la rueda en función del tiempo. Adherencia infinita. Moto: RC2013V
5.3.2. Conclusiones
Se aprecia que las aceleraciones máximas de la rueda (tanto positivas como negativas),
ocurren al extenderse la suspensión trasera, es decir, al “bajar” el bache. Por el contrario, se observa
que durante la compresión de la suspensión, no aparecen grandes aceleraciones.
Esto es debido a que, aunque al aumentar la pendiente del terreno se debe acelerar la rueda
para que la moto pueda mantener la velocidad horizontal constante, también al estar el eje del
basculante en una posición superior al eje de la rueda (𝜑𝜑0 < 0), ésta se desplaza hacia atrás al
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
26 Escuela Politécnica Superior de Jaén. Universidad de Jaén
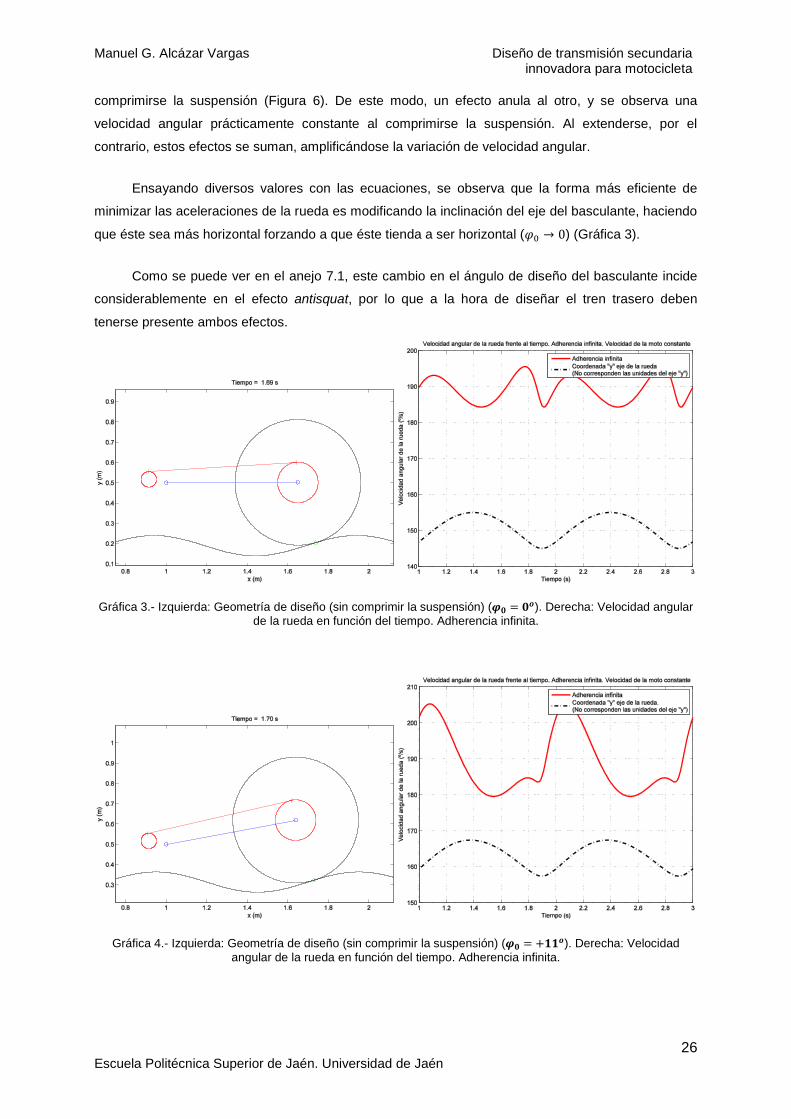
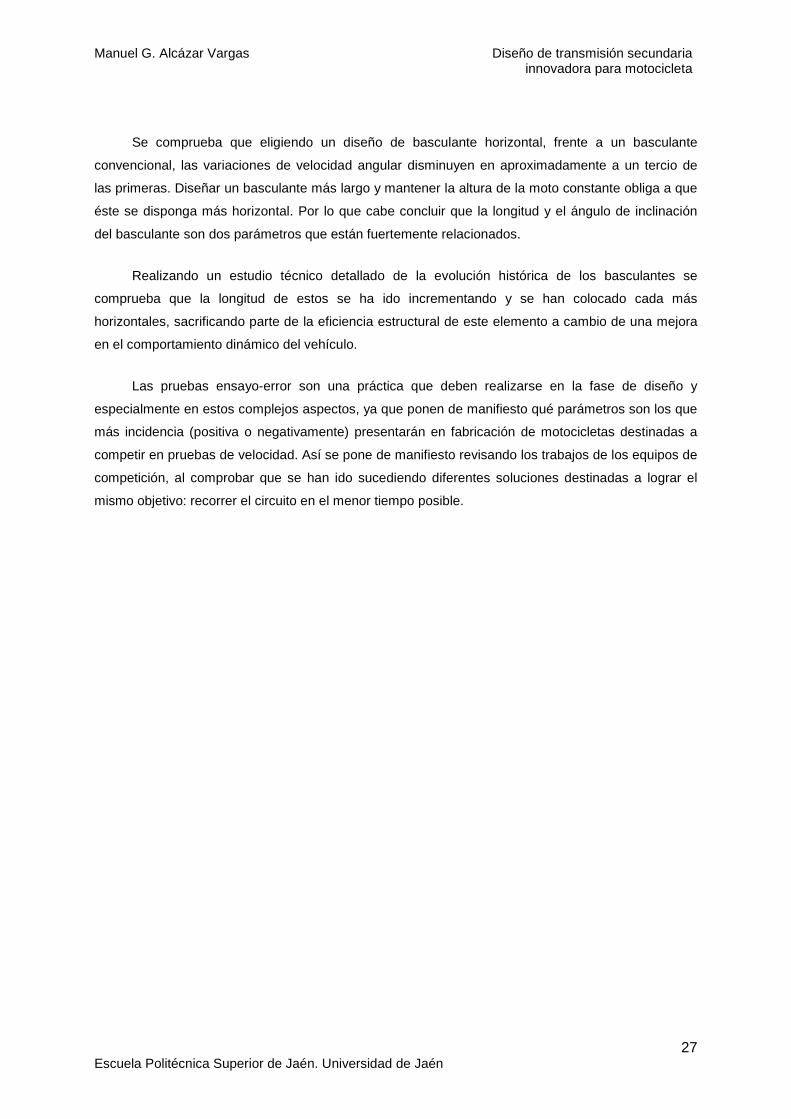
comprimirse la suspensión (Figura 6). De este modo, un efecto anula al otro, y se observa una
velocidad angular prácticamente constante al comprimirse la suspensión. Al extenderse, por el
contrario, estos efectos se suman, amplificándose la variación de velocidad angular.
Ensayando diversos valores con las ecuaciones, se observa que la forma más eficiente de
minimizar las aceleraciones de la rueda es modificando la inclinación del eje del basculante, haciendo
que éste sea más horizontal forzando a que éste tienda a ser horizontal (𝜑𝜑0 → 0) (Gráfica 3).
Como se puede ver en el anejo 7.1, este cambio en el ángulo de diseño del basculante incide
considerablemente en el efecto antisquat, por lo que a la hora de diseñar el tren trasero deben
tenerse presente ambos efectos.
Gráfica 3.- Izquierda: Geometría de diseño (sin comprimir la suspensión) (𝝋𝝋𝝋𝝋 = 𝝋𝝋𝟎𝟎). Derecha: Velocidad angular de la rueda en función del tiempo. Adherencia infinita.
Gráfica 4.- Izquierda: Geometría de diseño (sin comprimir la suspensión) (𝝋𝝋𝝋𝝋 = +𝟏𝟏𝟏𝟏𝟎𝟎). Derecha: Velocidad angular de la rueda en función del tiempo. Adherencia infinita.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
27 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Se comprueba que eligiendo un diseño de basculante horizontal, frente a un basculante
convencional, las variaciones de velocidad angular disminuyen en aproximadamente a un tercio de
las primeras. Diseñar un basculante más largo y mantener la altura de la moto constante obliga a que
éste se disponga más horizontal. Por lo que cabe concluir que la longitud y el ángulo de inclinación
del basculante son dos parámetros que están fuertemente relacionados.
Realizando un estudio técnico detallado de la evolución histórica de los basculantes se
comprueba que la longitud de estos se ha ido incrementando y se han colocado cada más
horizontales, sacrificando parte de la eficiencia estructural de este elemento a cambio de una mejora
en el comportamiento dinámico del vehículo.
Las pruebas ensayo-error son una práctica que deben realizarse en la fase de diseño y
especialmente en estos complejos aspectos, ya que ponen de manifiesto qué parámetros son los que
más incidencia (positiva o negativamente) presentarán en fabricación de motocicletas destinadas a
competir en pruebas de velocidad. Así se pone de manifiesto revisando los trabajos de los equipos de
competición, al comprobar que se han ido sucediendo diferentes soluciones destinadas a lograr el
mismo objetivo: recorrer el circuito en el menor tiempo posible.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
28 Escuela Politécnica Superior de Jaén. Universidad de Jaén
5.4. Hipótesis #2.- Motor con inercia infinita
En el apartado anterior se ha determinado la velocidad que tendría la rueda motriz bajo la
hipótesis de que la adherencia entre el suelo y el neumático se considera infinita. En esta segunda
hipótesis se presenta otra situación ideal que complementa la anterior, en donde se considera que la
inercia del motor es infinita. Este supuesto equivale a plantear que el motor conserva su cantidad de
movimiento angular.
Dado que en esta hipótesis interviene la transmisión secundaria (cadena), es necesario
establecer los parámetros de diseño de la misma: {𝑅𝑅𝐶𝐶 ,𝑅𝑅𝑃𝑃,Δ𝑥𝑥,Δ𝑦𝑦}.
Conforme con lo expuesto se analizan dos casos:
1. Ejes del piñón y del basculante concéctricos.
2. Ejes del piñón y del basculante separados.
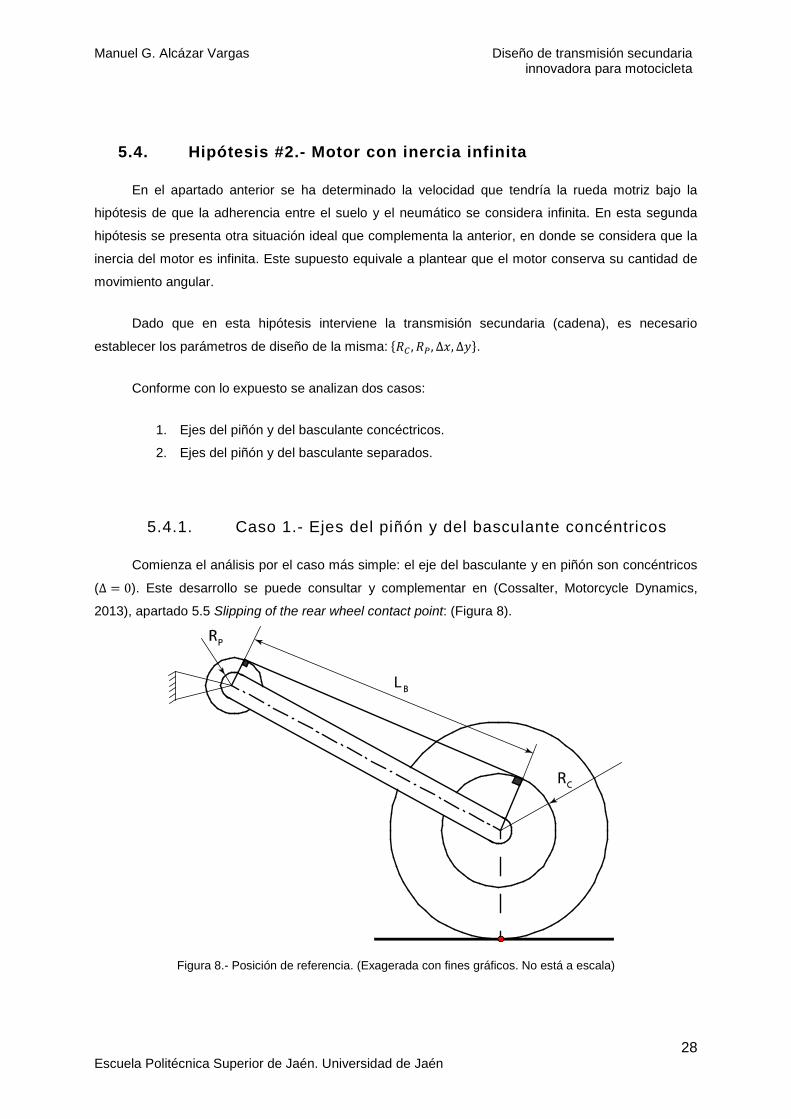
5.4.1. Caso 1.- Ejes del piñón y del basculante concéntricos
Comienza el análisis por el caso más simple: el eje del basculante y en piñón son concéntricos
(Δ = 0). Este desarrollo se puede consultar y complementar en (Cossalter, Motorcycle Dynamics,
2013), apartado 5.5 Slipping of the rear wheel contact point: (Figura 8).
Figura 8.- Posición de referencia. (Exagerada con fines gráficos. No está a escala)
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
29 Escuela Politécnica Superior de Jaén. Universidad de Jaén
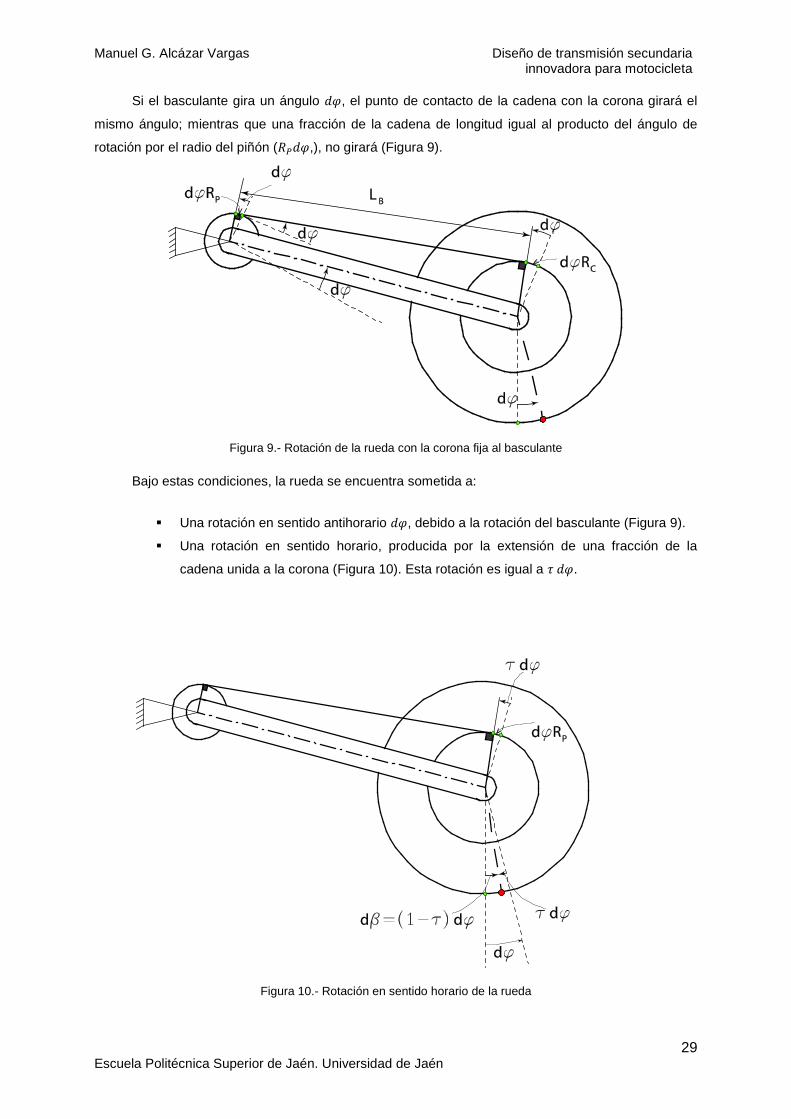
Si el basculante gira un ángulo 𝑑𝑑𝜑𝜑, el punto de contacto de la cadena con la corona girará el
mismo ángulo; mientras que una fracción de la cadena de longitud igual al producto del ángulo de
rotación por el radio del piñón (𝑅𝑅𝑃𝑃𝑑𝑑𝜑𝜑,), no girará (Figura 9).
Figura 9.- Rotación de la rueda con la corona fija al basculante
Bajo estas condiciones, la rueda se encuentra sometida a:
Una rotación en sentido antihorario 𝑑𝑑𝜑𝜑, debido a la rotación del basculante (Figura 9).
Una rotación en sentido horario, producida por la extensión de una fracción de la
cadena unida a la corona (Figura 10). Esta rotación es igual a 𝜏𝜏 𝑑𝑑𝜑𝜑.
Figura 10.- Rotación en sentido horario de la rueda
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
30 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Combinando estos dos movimientos se observa que si son concéntricos el eje del basculante y
el del piñón, y el basculante gira un ángulo 𝑑𝑑𝜑𝜑, el ángulo que gira la rueda (𝑑𝑑𝛽𝛽) vendrá dado por la
expresión (32.):
𝑑𝑑𝛽𝛽 = 𝑑𝑑𝜑𝜑 − 𝜏𝜏 𝑑𝑑𝜑𝜑 = (1 − 𝜏𝜏) 𝑑𝑑𝜑𝜑 (32.)
La expresión matemática anterior pone de manifiesto que si:
la relación de transmisión es igual a la unidad (1); es decir, el número de dientes del
piñón coinciden en número al de los de la corona y,
son concentricos el eje del basculante y del de la corona
no aparecen movimientos parásitos en la rueda debidos al sistema de transmisión. Por
consiguiente, los movimientos parásitos del motor se deberán –exclusivamente- a los movimientos
inducidos en la rueda por las irregularidades existentes en el firme.
Puesto que rara vez se emplean relaciones de transmisión iguales a la unidad, y por razones
constructivas no es posible que los ejes del piñón y del basculante sean concéntricos, se debe
estudiar el caso más general, en el cual existe un distancia entre el piñón y el eje del basculante. En
el presente TFG esta distancia se denota por la letra griega delta mayúscula (Δ). Cabe decir que el
empleo de una transmisión doble (o múltiple, en general) sí permite que esta distancia Δ sea nula.
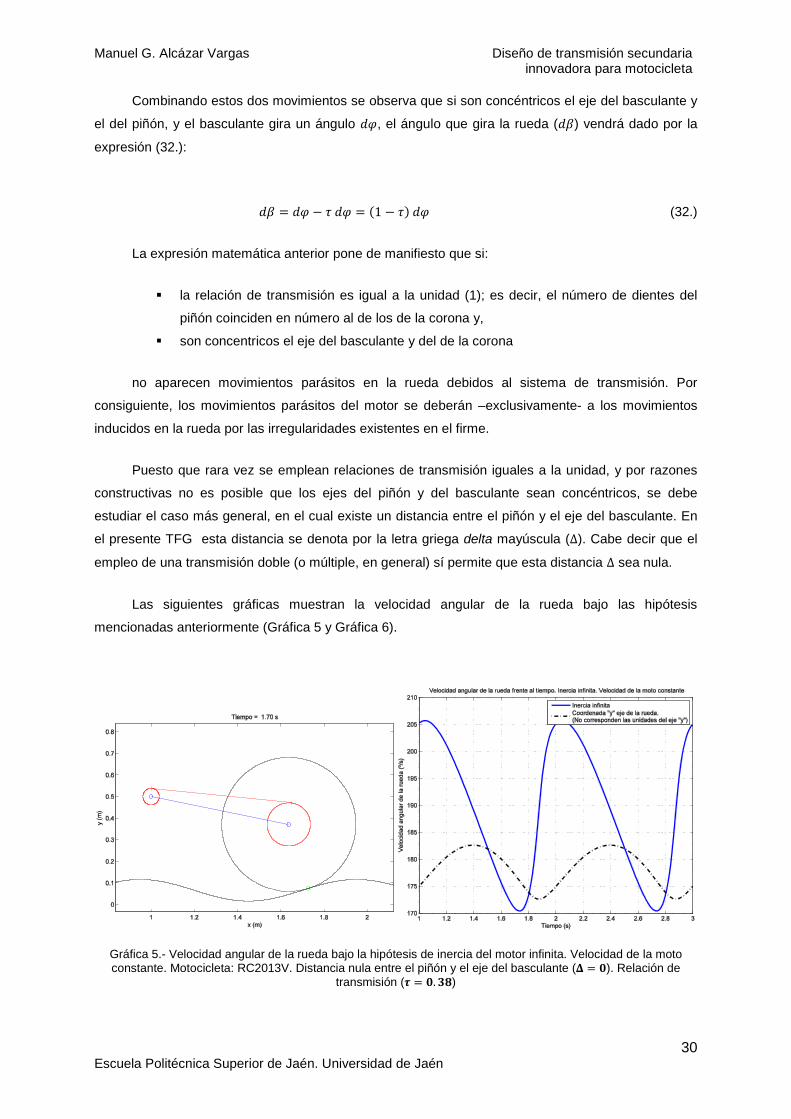
Las siguientes gráficas muestran la velocidad angular de la rueda bajo las hipótesis
mencionadas anteriormente (Gráfica 5 y Gráfica 6).
Gráfica 5.- Velocidad angular de la rueda bajo la hipótesis de inercia del motor infinita. Velocidad de la moto constante. Motocicleta: RC2013V. Distancia nula entre el piñón y el eje del basculante (𝚫𝚫 = 𝝋𝝋). Relación de
transmisión (𝝉𝝉 = 𝝋𝝋.𝟑𝟑𝟑𝟑)

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
31 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 6.- Velocidad angular de la rueda bajo la hipótesis de inercia del motor infinita. Velocidad de la moto constante. Motocicleta: RC2013V. Distancia nula entre el piñón y el eje del basculante (𝚫𝚫 = 𝝋𝝋). Relación de
transmisión (𝝉𝝉 = 𝟏𝟏.𝝋𝝋𝝋𝝋)
5.4.2. Caso 2.- Ejes del piñón y del basculante separados una distancia Δ
En este supuesto se desarrolla una expresión que permite conocer la velocidad de la rueda
debida al giro del basculante, existiendo un decalaje Δ. Se sigue considerando el motor bloqueado
(inercia del mismo infinita). En este caso, la geometría queda tal y como se muestra la Figura 11:
Figura 11.- Geometría del sistema: Piñón-Corona-Basculante
La longitud del tramo rojo de la cadena (𝐴𝐴 → 𝐵𝐵), de la Figura 11, se puede expresar conforme
con la siguiente relación (33.):

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
32 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝐿𝐿 = 𝜅𝜅 · 𝑅𝑅𝑃𝑃 + (−𝜂𝜂) · 𝑅𝑅𝑃𝑃 + 𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 + (−𝛽𝛽) · 𝑅𝑅𝐶𝐶 + 𝜂𝜂 · 𝑅𝑅𝐶𝐶 (33.)
Donde:
𝐿𝐿 ≡ Longitud del tramo rojo de la cadena (𝐴𝐴 → 𝐵𝐵).
𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 ≡ Longitud del tramo recto de la cadena.
𝜅𝜅 ≡ Ángulo que forma la línea que une un punto arbitrario del piñón y el eje de éste
con la vertical.
𝜂𝜂 ≡ Ángulo de inclinación del tramo superior de la cadena.
𝛽𝛽 ≡ Ángulo que forma la línea que une un punto arbitrario de la corona y el eje de la
misma con la vertical.
Siendo en este caso 𝛽𝛽, 𝜂𝜂 negativos, 𝜅𝜅 positivo.
Puesto que la longitud del tramo considerado, 𝐿𝐿, es constante y, la velocidad angular del piñón
es nula (𝜅𝜅 ≡ 𝑐𝑐𝑡𝑡𝑒𝑒), diferenciando la ecuación (33.), se obtiene la siguiente expresión (34.) y (35.):
𝑑𝑑𝐿𝐿 = 0 = 𝑑𝑑𝜅𝜅 · 𝑅𝑅𝑃𝑃 + (−𝑑𝑑𝜂𝜂) · 𝑅𝑅𝑃𝑃 + 𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 + (−𝑑𝑑𝛽𝛽) · 𝑅𝑅𝐶𝐶 + 𝑑𝑑𝜂𝜂 · 𝑅𝑅𝐶𝐶 (34.)
0 = −𝑑𝑑𝜂𝜂 · 𝑅𝑅𝑃𝑃 + 𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 + −𝑑𝑑𝛽𝛽 · 𝑅𝑅𝐶𝐶 + 𝑑𝑑𝜂𝜂 · 𝑅𝑅𝐶𝐶 (35.)
En la que se despeja 𝑑𝑑𝛽𝛽 (36.)
𝑑𝑑𝛽𝛽 =1𝑅𝑅𝐶𝐶
(𝑑𝑑𝜂𝜂 · (𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃) + 𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷) (36.)
Definiendo la relación de transmisión, 𝜏𝜏, como (37.):
𝜏𝜏 =𝑅𝑅𝑃𝑃𝑅𝑅𝐶𝐶
(37.)
Se llega a (38.):
𝑑𝑑𝛽𝛽 = (1 − 𝜏𝜏)𝑑𝑑𝜂𝜂 +𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷𝑅𝑅𝐶𝐶
(38.)
Derivando la expresión anterior con respecto al tiempo, se obtendrá la velocidad angular de la
rueda (39.): 𝑑𝑑𝛽𝛽𝑑𝑑𝑡𝑡
= 𝜔𝜔𝑅𝑅 (39.)
A continuación se buscará una función que relacione 𝜂𝜂 y 𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 con los parámetros de diseño
planteados y con la posición del basculante (𝜑𝜑). De este modo, se llega a la siguiente expresión (40.):

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
33 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝑑𝑑𝛽𝛽𝑑𝑑𝜑𝜑
= f1 (𝑝𝑝𝐶𝐶𝑟𝑟á𝑚𝑚𝑒𝑒𝑡𝑡𝑟𝑟𝑐𝑐𝑠𝑠 𝑑𝑑𝑒𝑒 𝑑𝑑𝑑𝑑𝑠𝑠𝑒𝑒ñ𝑐𝑐,𝜑𝜑) (40.)
Y dado que los parámetros de diseño son constantes en el tiempo (41.): 𝑑𝑑𝛽𝛽𝑑𝑑𝑡𝑡
=𝑑𝑑𝛽𝛽𝑑𝑑𝜑𝜑
𝑑𝑑𝜑𝜑𝑑𝑑𝑡𝑡
=𝑑𝑑𝛽𝛽𝑑𝑑𝜑𝜑
𝜔𝜔𝐵𝐵 = f1 · 𝜔𝜔𝐵𝐵 (41.)
Por consiguiente, si se determina la función f1, se puede conocer la relación que existe entre el
movimiento del basculante y el de la rueda, manteniendo el piñón fijo.
Para ello se obtiene el ángulo que forma la línea que une el piñón y el eje de la corona (𝑒𝑒) con
la línea que forma el tramo recto superior de la cadena (𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷). Dicho ángulo se designa mediante la
letra 𝛿𝛿. (Figura 12)
Figura 12.- Geometría del sistema: Piñón-Corona-Basculante
Donde:
𝛿𝛿 = atan �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷
� (42.)
𝛿𝛿 = asin �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃
𝑒𝑒� (43.)
Aplicando el teorema de Pitágoras se obtiene la longitud del tramo recto de la cadena (𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷):
𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷2 = 𝑒𝑒2 + (𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃)2 (44.)
Por otro lado, se puede resolver el triángulo formado por los ejes: basculante, corona y piñón
(Figura 13):

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
34 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Figura 13.- Geometría del sistema: Piñón-Corona-Basculante
Aplicando el teorema del coseno (45.):
𝑒𝑒2 = 𝐿𝐿𝐵𝐵2 + Δ2 − 2 Δ𝐿𝐿𝐵𝐵 cos 𝛾𝛾 (45.)
Donde (46.):
𝛾𝛾 = 𝜑𝜑 − 𝜎𝜎 (46.)
Aunque hay que indicar que esta última expresión presenta algunos inconvenientes. Por un
lado, definiendo (47.):
𝜎𝜎 = atan �Δ𝑦𝑦Δ𝑥𝑥� (47.)
Siendo Δ𝑥𝑥 ,Δ𝑦𝑦 las distancias horizontal y vertical entre el eje del basculante y el del piñón
respectivamente, se debe ser cauto al elaborar un código de programación que implemente estas
ecuaciones ya que (48.):
tan 𝜎𝜎 = tan(𝜎𝜎 + 180𝑚𝑚) (48.)
Por lo que en dicho código se debería especificar la siguiente condición (49.):
𝜎𝜎 =
⎩⎨
⎧atan �Δ𝑦𝑦Δ𝑥𝑥� ;Δ𝑥𝑥 > 0
atan �Δ𝑦𝑦Δ𝑥𝑥� + 𝜋𝜋; Δ𝑥𝑥 ≤ 0
(49.)
Una vez determinado 𝜎𝜎, que es un parámetro de diseño, y por ende, constante; se puede
resolver el triángulo mencionado anteriormente aplicando el Teorema del Seno (Figura 14):
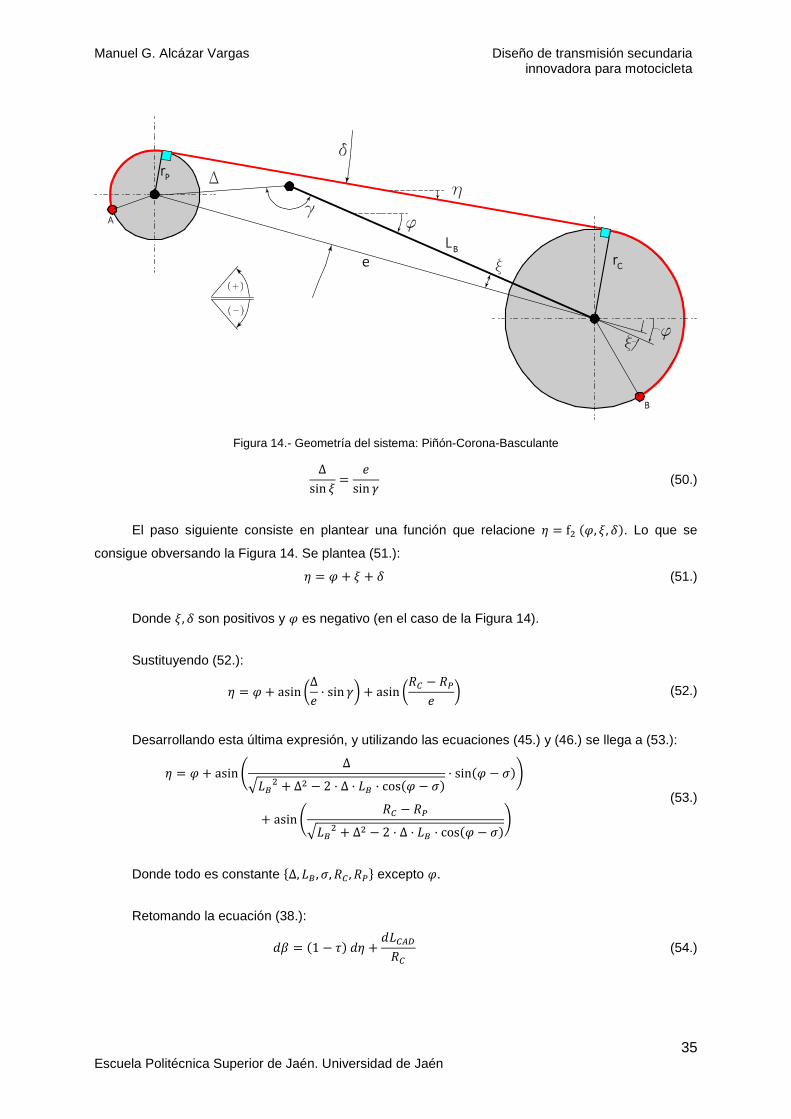
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
35 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Figura 14.- Geometría del sistema: Piñón-Corona-Basculante
Δsin 𝜉𝜉
=𝑒𝑒
sin 𝛾𝛾 (50.)
El paso siguiente consiste en plantear una función que relacione 𝜂𝜂 = f2 (𝜑𝜑, 𝜉𝜉, 𝛿𝛿). Lo que se
consigue obversando la Figura 14. Se plantea (51.):
𝜂𝜂 = 𝜑𝜑 + 𝜉𝜉 + 𝛿𝛿 (51.)
Donde 𝜉𝜉, 𝛿𝛿 son positivos y 𝜑𝜑 es negativo (en el caso de la Figura 14).
Sustituyendo (52.):
𝜂𝜂 = 𝜑𝜑 + asin �Δ𝑒𝑒
· sin 𝛾𝛾� + asin �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃
𝑒𝑒� (52.)
Desarrollando esta última expresión, y utilizando las ecuaciones (45.) y (46.) se llega a (53.):
𝜂𝜂 = 𝜑𝜑 + asin�Δ
�𝐿𝐿𝐵𝐵2 + Δ2 − 2 · Δ · 𝐿𝐿𝐵𝐵 · cos(𝜑𝜑 − 𝜎𝜎)· sin(𝜑𝜑 − 𝜎𝜎)�
+ asin�𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃
�𝐿𝐿𝐵𝐵2 + Δ2 − 2 · Δ · 𝐿𝐿𝐵𝐵 · cos(𝜑𝜑 − 𝜎𝜎)�
(53.)
Donde todo es constante {Δ, 𝐿𝐿𝐵𝐵 ,𝜎𝜎,𝑅𝑅𝐶𝐶 ,𝑅𝑅𝑃𝑃} excepto 𝜑𝜑.
Retomando la ecuación (38.):
𝑑𝑑𝛽𝛽 = (1 − 𝜏𝜏) 𝑑𝑑𝜂𝜂 +𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷𝑅𝑅𝐶𝐶
(54.)

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
36 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Se pueden combinar las ecuaciones (44.), (45.) y (53.) para llegar a la siguiente expresión
(55.):
𝑑𝑑𝛽𝛽 = (1 − 𝜏𝜏) · 𝑑𝑑 �𝜑𝜑 + asin�Δ
�𝐿𝐿𝐵𝐵2 + Δ2 − 2 · Δ · 𝐿𝐿𝐵𝐵 · cos(𝜑𝜑 − 𝜎𝜎)· sin(𝜑𝜑 − 𝜎𝜎)�
+ asin�𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃
�𝐿𝐿𝐵𝐵2 + Δ2 − 2 · Δ · 𝐿𝐿𝐵𝐵 · cos(𝜑𝜑 − 𝜎𝜎)�� +
1𝑅𝑅𝐶𝐶
· 𝑑𝑑 ��𝐿𝐿𝐵𝐵2 + Δ2 − 2 · Δ · 𝐿𝐿𝐵𝐵 · cos(𝜑𝜑 − 𝜎𝜎) + (𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃)2�
(55.)
Empleando las ecuaciones (44.) y (45.):
𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 = �𝐿𝐿𝐵𝐵2 + Δ2 − 2 · Δ · 𝐿𝐿𝐵𝐵 · cos(𝜑𝜑 − 𝜎𝜎) + (𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃)2
𝑒𝑒 = �𝐿𝐿𝐵𝐵2 + Δ2 − 2 · Δ · 𝐿𝐿𝐵𝐵 · cos(𝜑𝜑 − 𝜎𝜎)
𝛾𝛾 = 𝜑𝜑 − 𝜎𝜎
(56.)
Se simplifica la expresión (55.), quedando expresada como (57.):
𝑑𝑑𝛽𝛽 = (1 − 𝜏𝜏)𝑑𝑑 �𝜑𝜑 + asin �Δ𝑒𝑒
· sin 𝛾𝛾� + asin �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃
𝑒𝑒�� +
𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷𝑅𝑅𝐶𝐶
(57.)
Y, derivando por último con respecto a 𝜑𝜑 se se obtiene la función f1 definida con anterioridad
(40.):
𝑑𝑑𝛽𝛽𝑑𝑑𝜑𝜑
= (1 − 𝜏𝜏)
⎣⎢⎢⎡Δ cos 𝛾𝛾
𝑒𝑒 − Δ2𝐿𝐿𝐵𝐵 sin2 𝛾𝛾𝑒𝑒3
�1 − �Δ sin 𝛾𝛾𝑒𝑒 �
2−
(𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃)Δ 𝐿𝐿𝐵𝐵 sin 𝛾𝛾
𝑒𝑒3�1 − �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃𝑒𝑒 �
2+ 1
⎦⎥⎥⎤
+ Δ · 𝐿𝐿𝐵𝐵 sin 𝛾𝛾𝑅𝑅𝐶𝐶 𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷
(58.)
Esta última expresión (58.) depende únicamente de la geometría de la moto en cada instante.
Obsérvese que si se cumple que Δ = 0, 𝜏𝜏 = 1, la expresión (58.) es nula. Esto ya se dedujo en el
apartado (5.4.1)
De forma análoga al apartado anterior (5.3), se elabora un código en Matlab® , implementando
estas ecuaciones. La Gráfica 7 representa la velocidad angular de la rueda bajo la hipótesis de inercia
del motor infinita, manteniendo éste su su velocidad angular constante. Para determinar la velocidad
angular media de la rueda, y poder superponerla a las variaciones producidas por el giro del
basculante, se emplea la ecuación (59.):
⟨𝜔𝜔𝑅𝑅⟩ =⟨𝑣𝑣𝑅𝑅⟩𝑅𝑅𝑅𝑅
=1𝑅𝑅𝑅𝑅
·𝑑𝑑𝑑𝑑𝑠𝑠𝑡𝑡𝐶𝐶𝑠𝑠𝑐𝑐𝑑𝑑𝐶𝐶 𝑟𝑟𝑒𝑒𝑐𝑐𝑐𝑐𝑟𝑟𝑟𝑟𝑑𝑑𝑑𝑑𝐶𝐶
Δ𝑡𝑡 (59.)
Donde la distancia recorrida viene determinada por la longitud desarrollada de la curva seno, y
se calcula mediante una integral de linea, dada por la ecuación (60.):
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
37 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝑑𝑑𝑑𝑑𝑠𝑠𝑡𝑡 = � ��𝑑𝑑𝑦𝑦𝑑𝑑𝑥𝑥�2
+ 1𝜆𝜆
0· 𝑑𝑑𝑥𝑥 (60.)
Definida 𝑦𝑦 con anterioridad en la ecuación (3.):
𝑦𝑦 (𝑥𝑥, 𝑡𝑡) = 𝐴𝐴 sin(𝑘𝑘 𝑥𝑥 − 𝜔𝜔𝑡𝑡 + 𝜙𝜙) = 𝐴𝐴 sin �2𝜋𝜋 �𝑥𝑥𝜆𝜆−𝑡𝑡𝑇𝑇� + 𝜙𝜙� (61.)
Quedaría (62.):
𝑑𝑑𝑑𝑑𝑠𝑠𝑡𝑡 = � ��2𝜋𝜋𝐴𝐴 cos �2𝜋𝜋 �𝑥𝑥𝜆𝜆−𝑡𝑡𝑇𝑇� + 𝜙𝜙��
2+ 1
𝜆𝜆
0· 𝑑𝑑𝑥𝑥 (62.)
Adoptando la ecuación (59.) la forma (63.):
⟨𝜔𝜔𝑅𝑅⟩ =1
𝑅𝑅𝑅𝑅 𝑇𝑇� ��2𝜋𝜋𝐴𝐴 cos �2𝜋𝜋 �
𝑥𝑥𝜆𝜆−𝑡𝑡𝑇𝑇� + 𝜙𝜙��
2+ 1
𝜆𝜆
0· 𝑑𝑑𝑥𝑥 (63.)
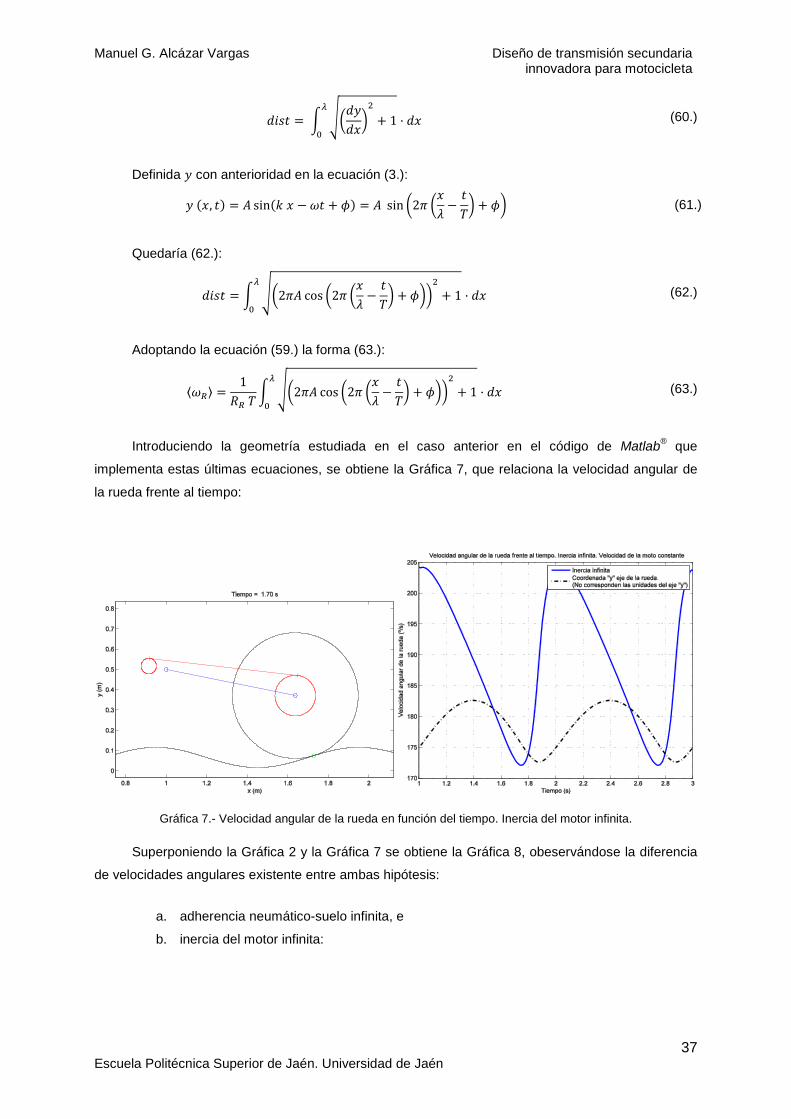
Introduciendo la geometría estudiada en el caso anterior en el código de Matlab® que
implementa estas últimas ecuaciones, se obtiene la Gráfica 7, que relaciona la velocidad angular de
la rueda frente al tiempo:
Gráfica 7.- Velocidad angular de la rueda en función del tiempo. Inercia del motor infinita.
Superponiendo la Gráfica 2 y la Gráfica 7 se obtiene la Gráfica 8, obeservándose la diferencia
de velocidades angulares existente entre ambas hipótesis:
a. adherencia neumático-suelo infinita, e
b. inercia del motor infinita:

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
38 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 8.- Velocidad angular de la rueda en función del tiempo. Ambas hipótesis.
Esta última gráfica es una de las más importantes del presente TFG. En ella se muestra la
velocidad angular de la rueda bajo las dos hipótesis consideradas anteriormente. Es previsible que en
la práctica la situación que se presente sea una intermedia entre ambas. Analizando el sistema de
transmisión que emplean las motocicletas de alta competición, y estudiando algunos casos
representativos, se observa que todas ellas coinciden sensiblemente en el mismo patrón de
comportamiento: las gráficas obtenidas de las velocidades analizadas prácticamente se invierten.
Se podría aventurar que ambas velocidades deberían ser coincidentes, para que no se
presenten fenómenos de deslizamiento entre el neumático y el suelo; pero los equipos técnicos que
trabajan en el diseño y fabricación de motocicletas destinadas a competición no pesiguen este
diseño, como queda demostrado con la Gráfica 8. En consecuencia se puede concluir que es otro el
motivo que justifica esta geometría adoptada.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
39 Escuela Politécnica Superior de Jaén. Universidad de Jaén
5.5. Hipótesis #3.- Velocidad angular del piñón motor con adherencia entre el firme y el neumático infinita.
5.5.1. Desarrollo matemático
Una vez se ha estudiado el movimiento al que está sometida la rueda bajo las dos hipótesis
anteriores, se van a emplear estos resultados para determinar el movimiento que tendrá el piñón del
motor en el supuesto de que la adherencia entre el neumático y el firme sea infinita. Si no existiesen
irregularidades en el terreno, o si el basculante no realizase ningún movimiento, la velocidad angular
del piñón sería la velocidad angular de la rueda trasera dividida entre la relación de transmisión 𝜏𝜏.
Dado que, en la práctica, existen irregularidades en el terreno que provocan movimientos extra en la
rueda y en el basculante, ambos se manifestarán en la velocidad angular del piñón.
La velocidad de giro del motor (𝜔𝜔𝑃𝑃) vendrá determinada por la expresión (64.):
𝜔𝜔𝑃𝑃 =𝜔𝜔𝑅𝑅
𝜏𝜏+ f3 · 𝜔𝜔𝐵𝐵 (64.)
Donde los subíndices 𝑃𝑃,𝑅𝑅,𝐵𝐵 denotan piñón, rueda y basculante respectivamente. f3 es una
función que relaciona la velocidad de giro del piñón frente a la velocidad de giro de la rueda. Dicha
expresión será análoga a la función f1 definida en el apartado 5.4. Partiendo de la hipótesis de que la
adherencia neumático-suelo es infinita, la velocidad angular de la rueda se puede calcular según se
ha desarrollado en 5.3. Para determinar f3, se parte de la ecuación (33.):
𝐿𝐿 = 𝜅𝜅 · 𝑅𝑅𝑃𝑃 + (−𝜂𝜂) · 𝑅𝑅𝑃𝑃 + 𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 + (−𝛽𝛽) · 𝑅𝑅𝐶𝐶 + 𝜂𝜂 · 𝑅𝑅𝐶𝐶 (65.)
Y se diferencia, siendo en este caso 𝛽𝛽 constante, y 𝜅𝜅 el parámetro buscado (66.) y (67.).
𝑑𝑑𝐿𝐿 = 0 = 𝑑𝑑𝜅𝜅 · 𝑅𝑅𝑃𝑃 + (−𝑑𝑑𝜂𝜂) · 𝑅𝑅𝑃𝑃 + 𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 + (−𝑑𝑑𝛽𝛽) · 𝑅𝑅𝐶𝐶 + 𝑑𝑑𝜂𝜂 · 𝑅𝑅𝐶𝐶 (66.)
0 = 𝑑𝑑𝜅𝜅 · 𝑅𝑅𝑃𝑃 − 𝑑𝑑𝜂𝜂 · 𝑅𝑅𝑃𝑃 + 𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷 + 𝑑𝑑𝜂𝜂 · 𝑅𝑅𝐶𝐶 (67.)
Despejando 𝑑𝑑𝜅𝜅 (68.):
𝑑𝑑𝜅𝜅 = �1 −1𝜏𝜏� 𝑑𝑑𝜂𝜂 −
𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷𝑅𝑅𝑃𝑃
(68.)
Introduciendo la expresión (53.), que relaciona 𝜂𝜂 con parámetros de diseño (69.):
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
40 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝜂𝜂 = 𝜑𝜑 + asin �Δ𝑒𝑒
· sin 𝛾𝛾� + asin �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃
𝑒𝑒� (69.)
Se obtiene la siguiente expresión (70.):
𝑑𝑑𝜅𝜅 = �𝜏𝜏 − 1𝜏𝜏
� 𝑑𝑑 �𝜑𝜑 + asin �Δ𝑒𝑒
· sin 𝛾𝛾� + asin �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃
𝑒𝑒�� −
𝑑𝑑𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷𝑅𝑅𝑃𝑃
(70.)
Y dado que se ha definido f3: 𝑑𝑑𝜅𝜅𝑑𝑑𝜑𝜑
= f3 (71.)
Se obtiene lo que se venía buscando (72.):
𝜔𝜔𝑃𝑃 =𝜔𝜔𝑅𝑅
𝜏𝜏+
⎣⎢⎢⎡(𝜏𝜏 − 1)
⎣⎢⎢⎡Δ cos 𝛾𝛾
𝑒𝑒 − Δ2𝐿𝐿𝐵𝐵 sin2 𝛾𝛾𝑒𝑒3
�1 − �Δ sin 𝛾𝛾𝑒𝑒 �
2−
(𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃)Δ 𝐿𝐿𝐵𝐵 sin 𝛾𝛾
𝑒𝑒3�1 − �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃𝑒𝑒 �
2+ 1
⎦⎥⎥⎤−
Δ · 𝐿𝐿𝐵𝐵 sin 𝛾𝛾𝑅𝑅𝑃𝑃 𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷
⎦⎥⎥⎤
· 𝜔𝜔𝐵𝐵 (72.)
Esta última expresión (72.) permite obtener la velocidad de giro del motor debido a las
irregularidades del terreno y al avance de la motocicleta a velocidad lineal constante. Esta ecuación
es quizás la más importante de este TFG, ya que agrupa todo el desarrollo cinemático estudiado.
Con anterioridad, y de cara a manifestar los movimientos parásitos que tienen lugar al circular
el vehículo sobre un firme irregular, se ha supuesto una geometría del suelo exagerada. Los
parámetros externos, de aquí en adelante, se verán modificados, conforme se reseñan en la Tabla 2:
Tabla 2.- Parámetros externos del firme y del vehículo
Parámetro Valor anterior Valor actual
Amplitud (𝐴𝐴) 50.0 mm 5.00 mm
Longitud de onda (𝜆𝜆) 1.00 m 1.00 m
Velocidad de avance de la moto (𝑣𝑣) 1.00 m/s 20.0 m/s
Estas modificaciones se realizan por varios motivos:
1. Anteriormente se ha estudiado un perfil de suelo sumamente irregular para manifestar
claramente el efecto que producen dichas irregularidades en los movimientos parásitos,
pero dicha situación no es la que ocurre en el caso de un circuito de velocidad.
2. La fuerza de contacto entre el suelo y el neumático viene determinada por la solución
de un sistema vibrante formado por una masa que oscila, soportada por un conjunto
muelle-amortiguador. Puesto que la excitación a la que está sometida es armónica, el
sentido de la fuerza de inercia es opuesto al sentido de la fuerza elástica, haciendo que
a bajas frecuencias la fuerza predominante sea elástica, mientras que a altas
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
41 Escuela Politécnica Superior de Jaén. Universidad de Jaén
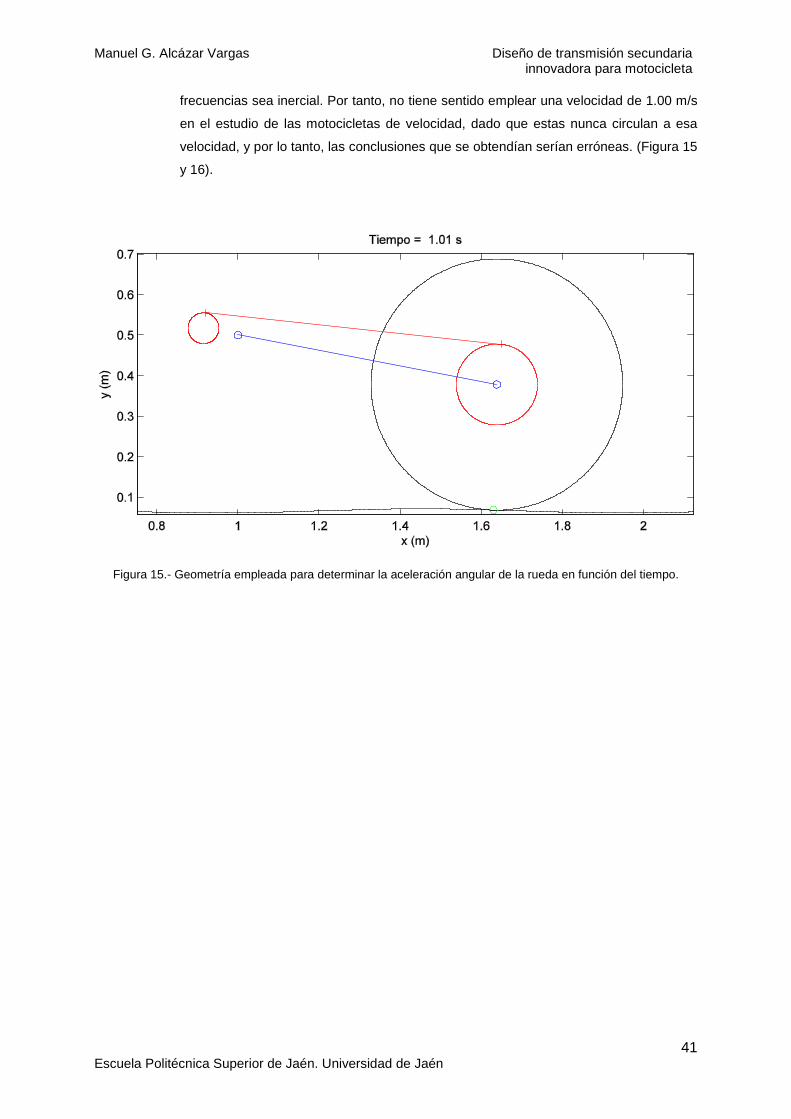
frecuencias sea inercial. Por tanto, no tiene sentido emplear una velocidad de 1.00 m/s
en el estudio de las motocicletas de velocidad, dado que estas nunca circulan a esa
velocidad, y por lo tanto, las conclusiones que se obtendían serían erróneas. (Figura 15
y 16).
Figura 15.- Geometría empleada para determinar la aceleración angular de la rueda en función del tiempo.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
42 Escuela Politécnica Superior de Jaén. Universidad de Jaén
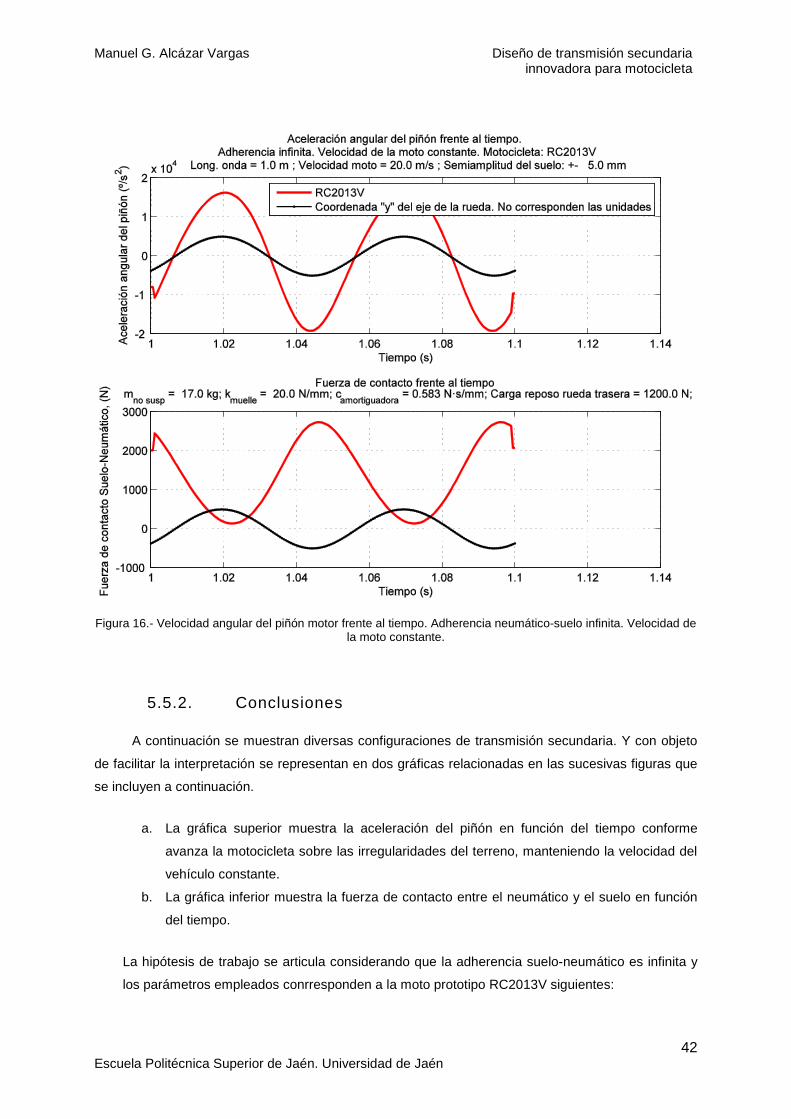
Figura 16.- Velocidad angular del piñón motor frente al tiempo. Adherencia neumático-suelo infinita. Velocidad de la moto constante.
5.5.2. Conclusiones
A continuación se muestran diversas configuraciones de transmisión secundaria. Y con objeto
de facilitar la interpretación se representan en dos gráficas relacionadas en las sucesivas figuras que
se incluyen a continuación.
a. La gráfica superior muestra la aceleración del piñón en función del tiempo conforme
avanza la motocicleta sobre las irregularidades del terreno, manteniendo la velocidad del
vehículo constante.
b. La gráfica inferior muestra la fuerza de contacto entre el neumático y el suelo en función
del tiempo.
La hipótesis de trabajo se articula considerando que la adherencia suelo-neumático es infinita y
los parámetros empleados conrresponden a la moto prototipo RC2013V siguientes:

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
43 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝐴𝐴 ≡ 5.00 𝑚𝑚𝑚𝑚
𝜆𝜆 ≡ 1.00 𝑚𝑚
𝑣𝑣 ≡ 20.0𝑚𝑚 𝑠𝑠⁄ = 72.0 𝑘𝑘𝑚𝑚 ℎ⁄
𝐿𝐿𝐵𝐵 ≡ 650 𝑚𝑚𝑚𝑚
𝜑𝜑0 ≡ −11.0𝑚𝑚
𝑅𝑅𝑅𝑅 ≡ 310 𝑚𝑚𝑚𝑚
𝑅𝑅𝐶𝐶 ≡ 100 𝑚𝑚𝑚𝑚
𝑅𝑅𝑃𝑃 ≡ 38 𝑚𝑚𝑚𝑚
Δ𝑥𝑥 ≡ −85 𝑚𝑚𝑚𝑚
Δ𝑦𝑦 ≡ +17 𝑚𝑚𝑚𝑚
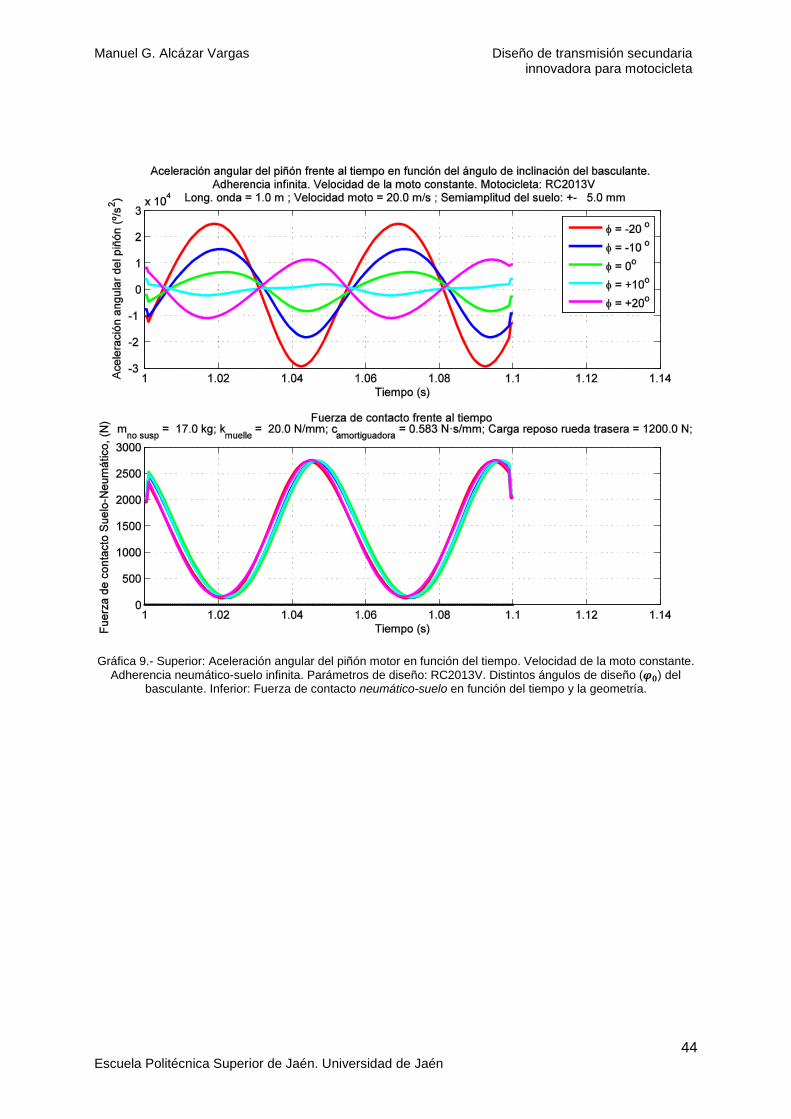
Modificándose únicamente los parámetros indicados en cada gráfica en particular. A saber:
Gráfica 9: Aceleración angular del piñón frente al tiempo. Geometría RC2013V
modificando el ángulo de inclinación del basculante (𝜑𝜑0).
Gráfica 10: Aceleración angular del piñón frente al tiempo. Geometría RC2013V
modificando la longitud del basculante (𝐿𝐿𝐵𝐵).
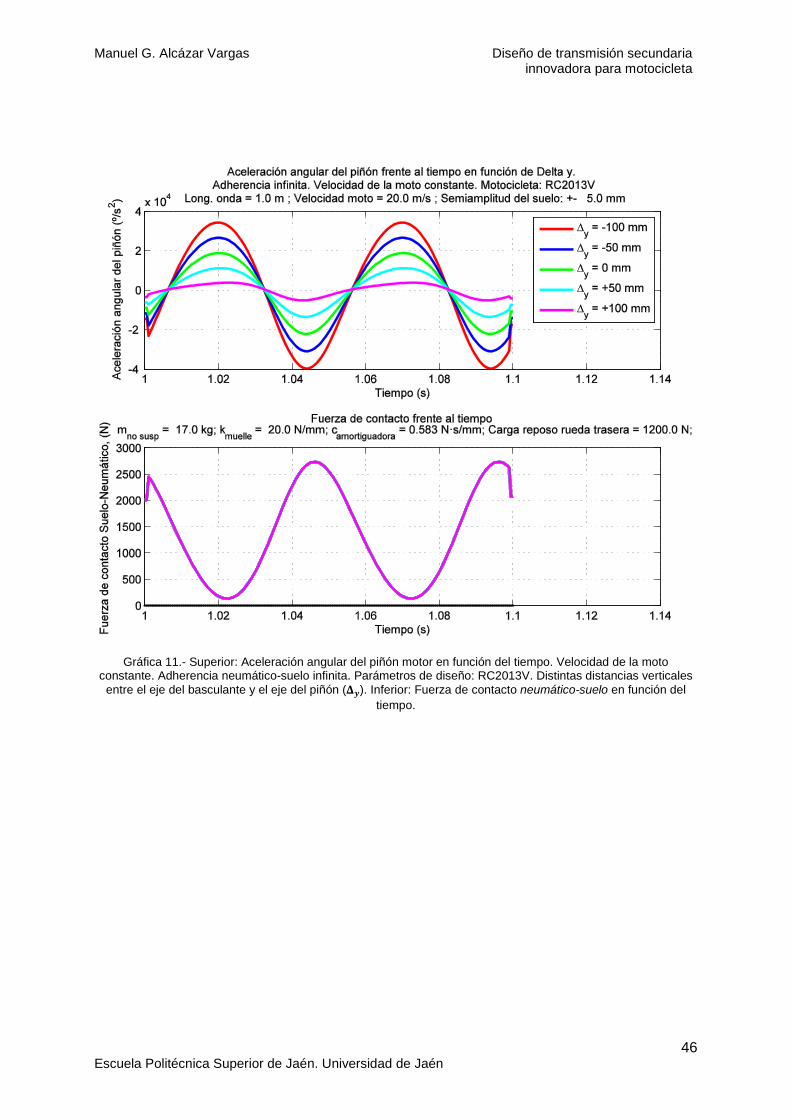
Gráfica 11: Aceleración angular del piñón frente al tiempo. Geometría RC2013V
modificando la distancia vertical entre los ejes del basculante y el piñón (Δ𝑦𝑦),
manteniendo constante la distancia horizontal entre ambos ejes (Δ𝑥𝑥).
Gráfica 12: Aceleración angular del piñón frente al tiempo. Geometría RC2013V
modificando la distancia entre los ejes del basculante y el piñón (Δ), manteniendo
constante el ángulo que forma la línea que los une con la horizontal (11𝑚𝑚).
Gráfica 13: Aceleración angular del piñón frente al tiempo. Geometría RC2013V
modificando el radio de la corona (𝑅𝑅𝐶𝐶) manteniendo constante la relación de
transmisión (𝜏𝜏 = 0.38).
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
44 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 9.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad de la moto constante. Adherencia neumático-suelo infinita. Parámetros de diseño: RC2013V. Distintos ángulos de diseño (𝝋𝝋𝝋𝝋) del
basculante. Inferior: Fuerza de contacto neumático-suelo en función del tiempo y la geometría.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
45 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 10.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad de la moto constante. Adherencia neumático-suelo infinita. Parámetros de diseño: RC2013V. Distintas longitudes del
basculante (𝑳𝑳𝑳𝑳). Inferior: Fuerza de contacto neumático-suelo en función del tiempo y la geometría.
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
46 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 11.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad de la moto constante. Adherencia neumático-suelo infinita. Parámetros de diseño: RC2013V. Distintas distancias verticales
entre el eje del basculante y el eje del piñón (𝚫𝚫𝒚𝒚). Inferior: Fuerza de contacto neumático-suelo en función del tiempo.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
47 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 12.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad de la moto constante. Adherencia neumático-suelo infinita. Parámetros de diseño: RC2013V. Distintas distancias totales entre el eje del basculante y el eje del piñón (𝚫𝚫). Inferior: Fuerza de contacto neumático-suelo en función del
tiempo.
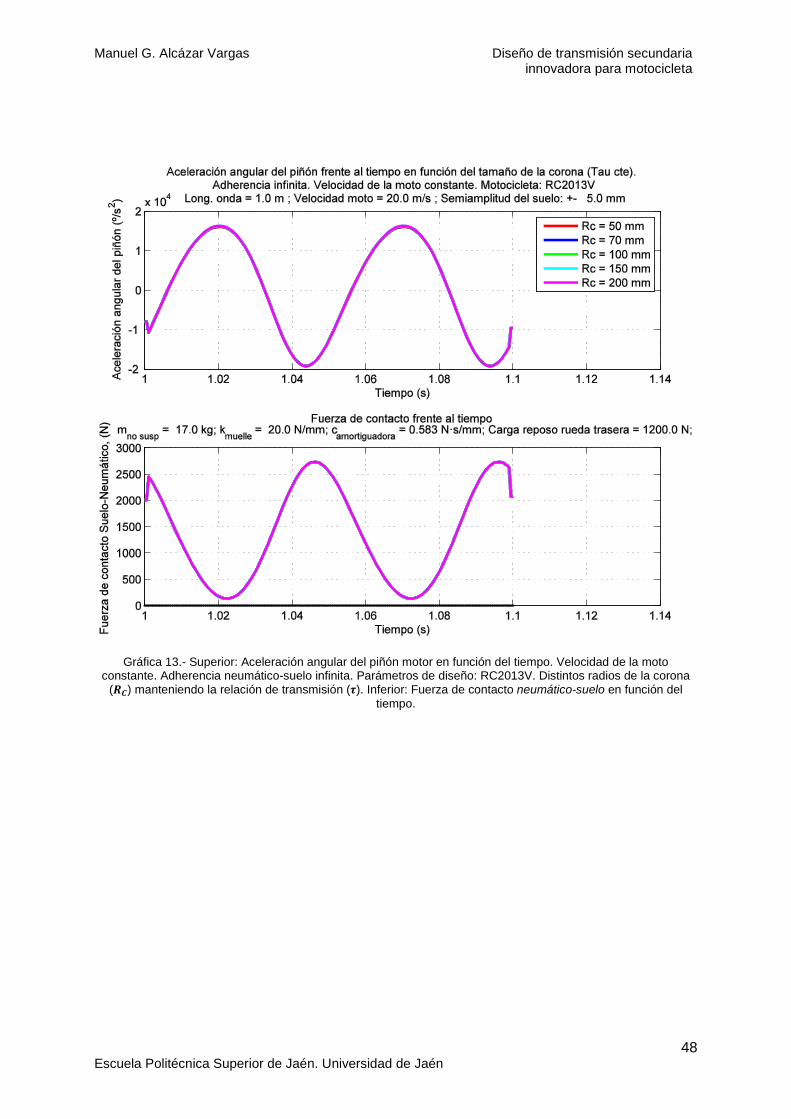
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
48 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Gráfica 13.- Superior: Aceleración angular del piñón motor en función del tiempo. Velocidad de la moto constante. Adherencia neumático-suelo infinita. Parámetros de diseño: RC2013V. Distintos radios de la corona
(𝑹𝑹𝑹𝑹) manteniendo la relación de transmisión (𝝉𝝉). Inferior: Fuerza de contacto neumático-suelo en función del tiempo.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
49 Escuela Politécnica Superior de Jaén. Universidad de Jaén
5.5.3. Estimación del par motriz efectivo al pasar la motocicleta por un firme irregular. Caso práctico
En este apartado se estima el par motriz efectivo en la rueda al pasar la motocicleta sobre el
firme irregular descrito en los apartados anteriores. Para ello, es necesario determinar la siguiente
serie de parámetros:
Momento de inercia del motor, reducido en el eje de giro del cigüeñal (𝐼𝐼𝑚𝑚).
Momento de inercia de la rueda trasera respecto a su eje de giro (𝐼𝐼𝑅𝑅).
Relación de transmisión primara (𝜏𝜏𝑚𝑚,𝑝𝑝).
Relación de transmisión de la caja de cambios (𝜏𝜏𝑝𝑝,𝑠𝑠).
Relación de transmisión secundaria (𝜏𝜏𝑠𝑠,𝑟𝑟).
Radio de la rueda (𝑅𝑅𝑅𝑅).
Par motriz al régimen de giro en la marcha engranada (𝑇𝑇𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟), y avanzando la
motocicleta a la velocidad mencionada en los apartados anteriores.
Conforme con Cossalter (2013) se pueden obtener los siguientes valores para una motocicleta
de tipo Racing:
𝐼𝐼𝑚𝑚 = 0.05 𝑘𝑘𝑔𝑔 · 𝑚𝑚2
𝐼𝐼𝑅𝑅 = 0.80 𝑘𝑘𝑔𝑔 · 𝑚𝑚2
Consultando la ficha técnica4 de una motocicleta tipo Racing, como es el modelo Honda CBR
1000RR, se obtiene:
𝜏𝜏𝑚𝑚,𝑝𝑝 = 0.5824
𝜏𝜏𝑝𝑝,𝑠𝑠 = 0.4374 (1ª marcha)
𝜏𝜏𝑠𝑠,𝑟𝑟 = 0.3810
𝑅𝑅𝑅𝑅 = 0.31 𝑚𝑚
La velocidad lineal de la moto viene determinada por la expresión (73.):
𝑣𝑣 = 𝜔𝜔𝑅𝑅 · 𝑅𝑅𝑅𝑅 = 𝜔𝜔𝑚𝑚 · 𝜏𝜏𝑚𝑚,𝑝𝑝 · 𝜏𝜏𝑝𝑝,𝑠𝑠 · 𝜏𝜏𝑠𝑠,𝑟𝑟 · 𝑅𝑅𝑅𝑅 (73.)
De donde se desprende (74.):
𝜔𝜔𝑅𝑅 =𝑣𝑣
𝜏𝜏𝑚𝑚,𝑝𝑝 · 𝜏𝜏𝑝𝑝,𝑠𝑠 · 𝜏𝜏𝑠𝑠,𝑟𝑟 · 𝑅𝑅𝑅𝑅 (74.)
Siendo, en el caso que nos ocupa (𝑣𝑣 = 20.0 𝑚𝑚/𝑠𝑠) la velocidad de giro del cigüeñal, 𝜔𝜔𝑅𝑅 =
6 350 𝑟𝑟𝑝𝑝𝑚𝑚.
4 http://world.honda.com/CBR1000RR/spec/
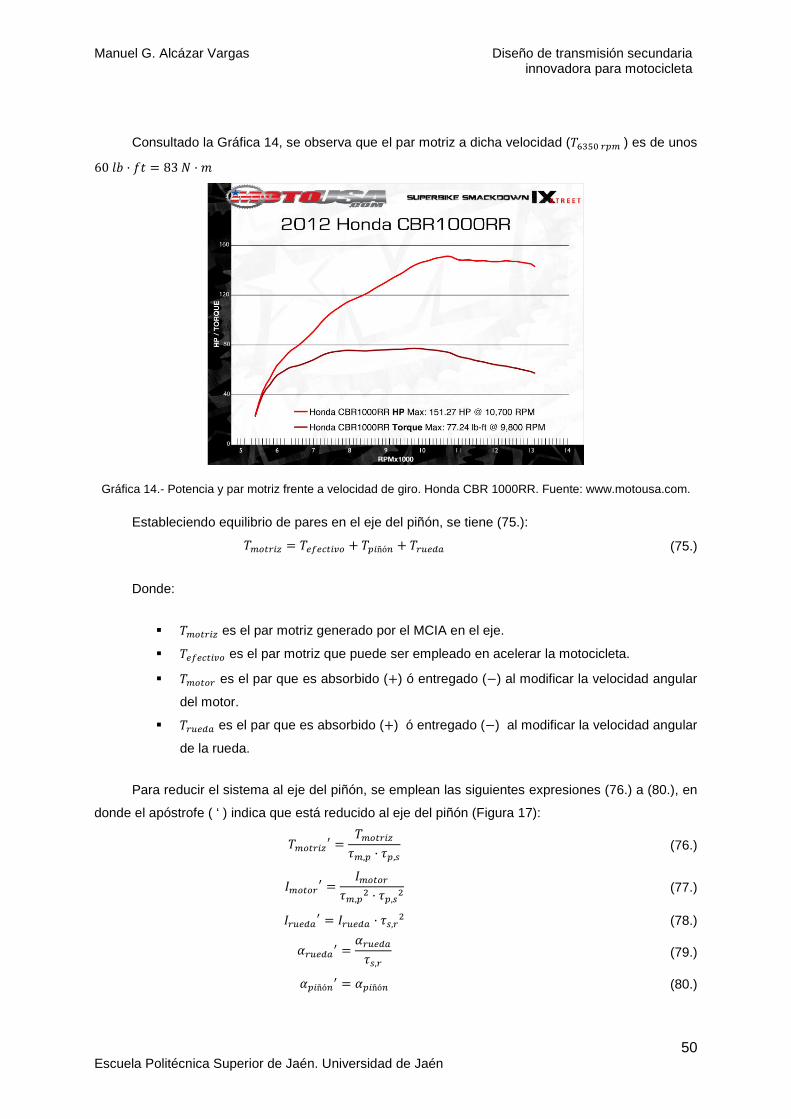
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
50 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Consultado la Gráfica 14, se observa que el par motriz a dicha velocidad (𝑇𝑇6350 𝑟𝑟𝑝𝑝𝑚𝑚 ) es de unos
60 𝑙𝑙𝑙𝑙 · 𝑓𝑓𝑡𝑡 = 83 𝑁𝑁 · 𝑚𝑚
Gráfica 14.- Potencia y par motriz frente a velocidad de giro. Honda CBR 1000RR. Fuente: www.motousa.com.
Estableciendo equilibrio de pares en el eje del piñón, se tiene (75.):
𝑇𝑇𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟𝑖𝑖𝑚𝑚 = 𝑇𝑇𝑠𝑠𝑒𝑒𝑠𝑠𝑐𝑐𝑚𝑚𝑖𝑖𝑒𝑒𝑚𝑚 + 𝑇𝑇𝑝𝑝𝑖𝑖ñó𝑛𝑛 + 𝑇𝑇𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟 (75.)
Donde:
𝑇𝑇𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟𝑖𝑖𝑚𝑚 es el par motriz generado por el MCIA en el eje.
𝑇𝑇𝑠𝑠𝑒𝑒𝑠𝑠𝑐𝑐𝑚𝑚𝑖𝑖𝑒𝑒𝑚𝑚 es el par motriz que puede ser empleado en acelerar la motocicleta.
𝑇𝑇𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟 es el par que es absorbido (+) ó entregado (−) al modificar la velocidad angular
del motor.
𝑇𝑇𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟 es el par que es absorbido (+) ó entregado (−) al modificar la velocidad angular
de la rueda.
Para reducir el sistema al eje del piñón, se emplean las siguientes expresiones (76.) a (80.), en
donde el apóstrofe ( ‘ ) indica que está reducido al eje del piñón (Figura 17):
𝑇𝑇𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟𝑖𝑖𝑚𝑚′ =
𝑇𝑇𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟𝑖𝑖𝑚𝑚𝜏𝜏𝑚𝑚,𝑝𝑝 · 𝜏𝜏𝑝𝑝,𝑠𝑠
(76.)
𝐼𝐼𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟′ =
𝐼𝐼𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑟𝑟𝜏𝜏𝑚𝑚,𝑝𝑝
2 · 𝜏𝜏𝑝𝑝,𝑠𝑠2 (77.)
𝐼𝐼𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟′ = 𝐼𝐼𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟 · 𝜏𝜏𝑠𝑠,𝑟𝑟2 (78.)
𝛼𝛼𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟′ =𝛼𝛼𝑟𝑟𝑠𝑠𝑠𝑠𝑟𝑟𝑟𝑟𝜏𝜏𝑠𝑠,𝑟𝑟
(79.)
𝛼𝛼𝑝𝑝𝑖𝑖ñó𝑛𝑛′ = 𝛼𝛼𝑝𝑝𝑖𝑖ñó𝑛𝑛 (80.)
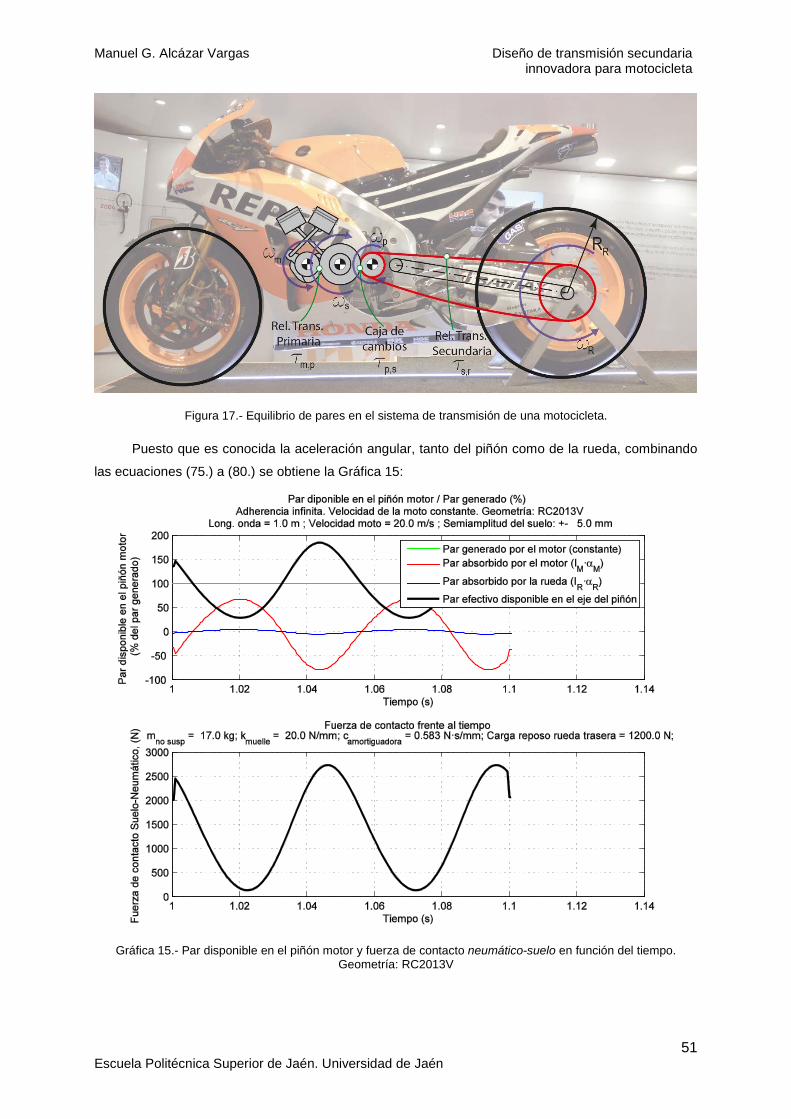
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
51 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Figura 17.- Equilibrio de pares en el sistema de transmisión de una motocicleta.
Puesto que es conocida la aceleración angular, tanto del piñón como de la rueda, combinando
las ecuaciones (75.) a (80.) se obtiene la Gráfica 15:
Gráfica 15.- Par disponible en el piñón motor y fuerza de contacto neumático-suelo en función del tiempo. Geometría: RC2013V

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
52 Escuela Politécnica Superior de Jaén. Universidad de Jaén
6. Conclusiones
En este TFG se han analizado los movimientos parásitos que aparecen en el piñón motor y en
la rueda trasera de una motocicleta, como consecuencia del avance del vehículo sobre un firme
irregular. Para ello se han formulado las siguientes hipótesis de trabajo:
1. Perfil del terreno senoidal.
2. Adherencia suelo-neumático infinita.
3. Rigidez del neumático y del suelo infinitas.
4. Chasis y tren delantero de la moto desplazándose a velociad lineal constante y
horizontal.
Bajo estas suposiciones se ha demostrado que la transmisión, así como la suspensión trasera,
se diseñan atendiendo a un objetivo perfectamente definido: garantizar la máxima capacidad de
transmisión de potencia. Mediante los diseños de transmisión empleados en motocicletas de carreras,
se consigue combinar la fuerza de contacto máxima con el máximo par efectivo generado por el
motor, cumpliendo el objetivo previsto de la transmisión.
También se ha demostrado que los parámetros más importantes en el efecto antisquat son los
que más afectan a la transmisión de potencia de una motocicleta, por lo que se concluye que no es
posible hacer un diseño de transmisión secundaria sin considerar el efecto antisquat.
El resultado del trabajo se presenta a través de la siguiente expresión matemática (81.)
𝜔𝜔𝑃𝑃 =𝜔𝜔𝑅𝑅
𝜏𝜏+
⎣⎢⎢⎡(𝜏𝜏 − 1)
⎣⎢⎢⎡Δ cos 𝛾𝛾
𝑒𝑒 − Δ2𝐿𝐿𝐵𝐵 sin2 𝛾𝛾𝑒𝑒3
�1 − �Δ sin 𝛾𝛾𝑒𝑒 �
2−
(𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃)Δ 𝐿𝐿𝐵𝐵 sin 𝛾𝛾
𝑒𝑒3�1 − �𝑅𝑅𝐶𝐶 − 𝑅𝑅𝑃𝑃𝑒𝑒 �
2+ 1
⎦⎥⎥⎤−
Δ · 𝐿𝐿𝐵𝐵 sin 𝛾𝛾𝑅𝑅𝑃𝑃 𝐿𝐿𝐶𝐶𝐴𝐴𝐷𝐷
⎦⎥⎥⎤
· 𝜔𝜔𝐵𝐵
(81.)
Para argumentar la viabilidad mecánica de lo desarrollado se han incluido un conjunto de
gráficas (elaboradas con Matlab®, tras su planteamiento teórico previo), que muestran cómo varían
las aceleraciones en el motor en función del conjunto de parámetros definidos previamente en la fase
de diseño. Conforme con ello, se identifican como los más representativos los siguientes: el ángulo de
inclinación del basculante, la distancia vertical entre el eje del piñón y el eje del basculante, y la
longitud de este último.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
53 Escuela Politécnica Superior de Jaén. Universidad de Jaén
En consecuencia, y a modo de conclusión final, utilizando los códigos desarrollados en este
TFG es posible diseñar una transmisión secundaria por cadena, tanto simple como múltiple, que
optimice la transmisión de potencia del motor una vez sean conocidas las características técnicas de
la motocicleta y el perfil del terreno sobre el que circulará.
Y, retomando el objetivo práctico planteado al inicio de este TFG, el resultado del mismo está
destinado a ser utilizado en el diseño final y en la fabricación posterior de la nueva motocicleta
prevista para la inminente convocatoria de MotoStudent 2015-16, en la que participará la Escuela
Politécnica Superior de Jaén. Para ello es necesario conocer la geometría y las características finales
del modelo propuesto por la Convocante, información que permitirá, mediante un software de
simulación dinámica (MSC ADAMS®, por ejemplo), ajustarlo a las exigencias futuras establecidas.
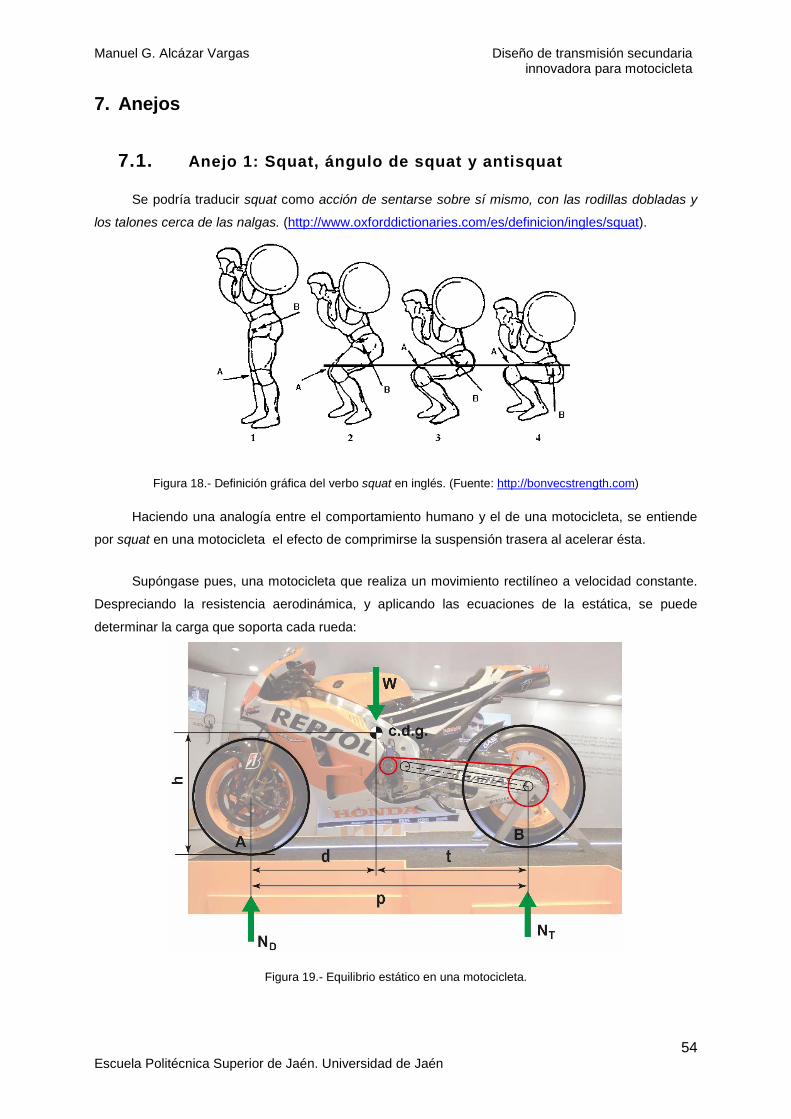
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
54 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7. Anejos
7.1. Anejo 1: Squat, ángulo de squat y antisquat
Se podría traducir squat como acción de sentarse sobre sí mismo, con las rodillas dobladas y
los talones cerca de las nalgas. (http://www.oxforddictionaries.com/es/definicion/ingles/squat).
Figura 18.- Definición gráfica del verbo squat en inglés. (Fuente: http://bonvecstrength.com)
Haciendo una analogía entre el comportamiento humano y el de una motocicleta, se entiende
por squat en una motocicleta el efecto de comprimirse la suspensión trasera al acelerar ésta.
Supóngase pues, una motocicleta que realiza un movimiento rectilíneo a velocidad constante.
Despreciando la resistencia aerodinámica, y aplicando las ecuaciones de la estática, se puede
determinar la carga que soporta cada rueda:
Figura 19.- Equilibrio estático en una motocicleta.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
55 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Considerando la Figura 19, aplicando las ecuaciones de la estática, se obtiene la carga que
soporta el tren delantero (𝑁𝑁𝐷𝐷) y el trasero (𝑁𝑁𝑇𝑇):
�𝑀𝑀𝐵𝐵 = 0 ⇒ 𝑊𝑊 · 𝑡𝑡 = 𝑁𝑁𝐷𝐷 · 𝑝𝑝 ⇒ 𝑁𝑁𝐷𝐷 = 𝑊𝑊 ·𝑡𝑡𝑝𝑝
(82.)
�𝐹𝐹𝑉𝑉 = 0 ⇒ 𝑁𝑁𝑇𝑇 = 𝑊𝑊 −𝑁𝑁𝐷𝐷 = 𝑊𝑊 �1 −𝑡𝑡𝑝𝑝� (83.)
Si la motocicleta acelera, experimentará una fuerza de inercia aplicada en el centro de masas
igual y de sentido contrario al producto de la masa por la aceleración, así como una transferencia de
carga del tren delantero al trasero (Δ𝑁𝑁), tal y como muestra la Figura 20:
Figura 20.- Equilibrio dinámico en una motocicleta.
Se vuelven a aplicar las ecuaciones de equilibrio, estableciendo el equilibrio dinámico como
muestra la figura:
�𝑀𝑀𝐵𝐵 = 0 ⇒ 𝑊𝑊 · 𝑡𝑡 + Δ𝑁𝑁 · 𝑝𝑝 = 𝑁𝑁𝐷𝐷 · 𝑝𝑝 + 𝑚𝑚 · 𝐶𝐶 · ℎ (84.)
Dado que:
𝑊𝑊 · 𝑡𝑡 = 𝑁𝑁𝐷𝐷 · 𝑝𝑝 (85.)
Se tiene:
Δ𝑁𝑁 · 𝑝𝑝 = 𝑚𝑚 · 𝐶𝐶 · ℎ (86.)
Δ𝑁𝑁 = 𝑚𝑚 · 𝐶𝐶 ·ℎ𝑝𝑝
(87.)
Esta expresión nos indica que la dirección de la fuerza extra que aparece en la rueda trasera al
acelerar el vehículo es contante, tal y como se puede ver en la Figura 21. El ángulo que forma dicha
fuerza con la horizontal se ha denotado por la letra griega nu: 𝜈𝜈
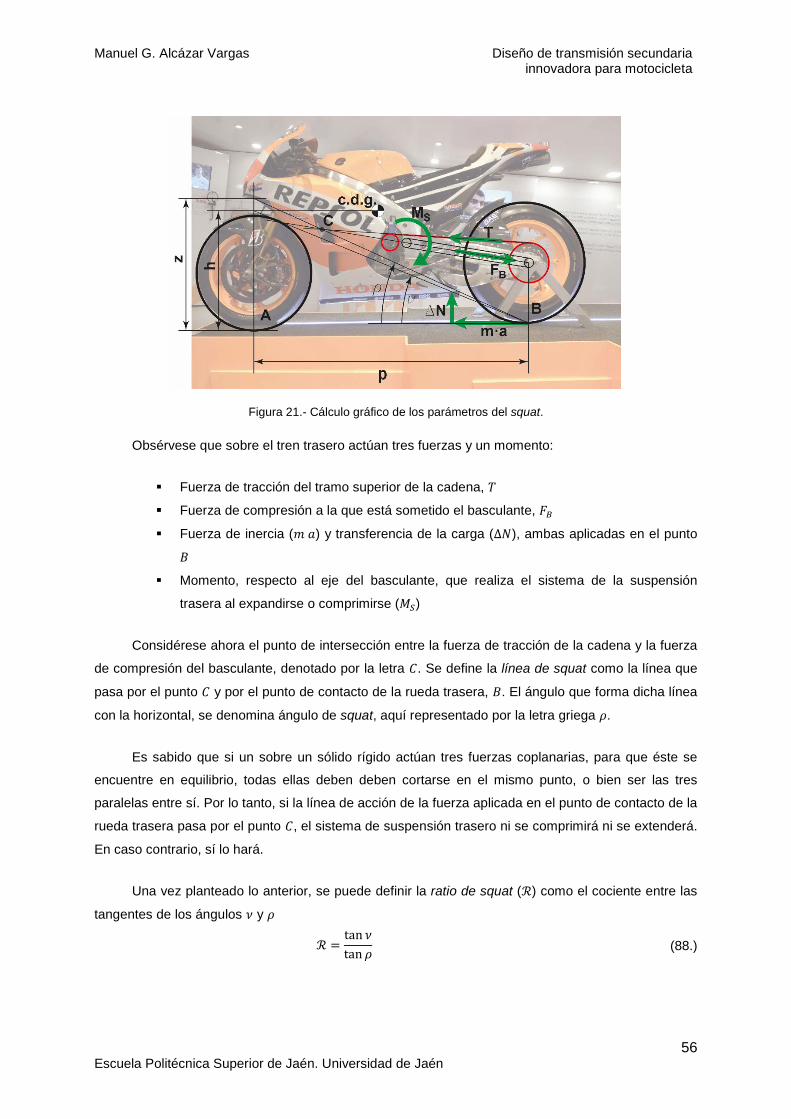
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
56 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Figura 21.- Cálculo gráfico de los parámetros del squat.
Obsérvese que sobre el tren trasero actúan tres fuerzas y un momento:
Fuerza de tracción del tramo superior de la cadena, 𝑇𝑇
Fuerza de compresión a la que está sometido el basculante, 𝐹𝐹𝐵𝐵
Fuerza de inercia (𝑚𝑚 𝐶𝐶) y transferencia de la carga (Δ𝑁𝑁), ambas aplicadas en el punto
𝐵𝐵
Momento, respecto al eje del basculante, que realiza el sistema de la suspensión
trasera al expandirse o comprimirse (𝑀𝑀𝑆𝑆)
Considérese ahora el punto de intersección entre la fuerza de tracción de la cadena y la fuerza
de compresión del basculante, denotado por la letra 𝐶𝐶. Se define la línea de squat como la línea que
pasa por el punto 𝐶𝐶 y por el punto de contacto de la rueda trasera, 𝐵𝐵. El ángulo que forma dicha línea
con la horizontal, se denomina ángulo de squat, aquí representado por la letra griega 𝜌𝜌.
Es sabido que si un sobre un sólido rígido actúan tres fuerzas coplanarias, para que éste se
encuentre en equilibrio, todas ellas deben deben cortarse en el mismo punto, o bien ser las tres
paralelas entre sí. Por lo tanto, si la línea de acción de la fuerza aplicada en el punto de contacto de la
rueda trasera pasa por el punto 𝐶𝐶, el sistema de suspensión trasero ni se comprimirá ni se extenderá.
En caso contrario, sí lo hará.
Una vez planteado lo anterior, se puede definir la ratio de squat (ℛ) como el cociente entre las
tangentes de los ángulos 𝜈𝜈 y 𝜌𝜌
ℛ =tan 𝜈𝜈tan 𝜌𝜌
(88.)
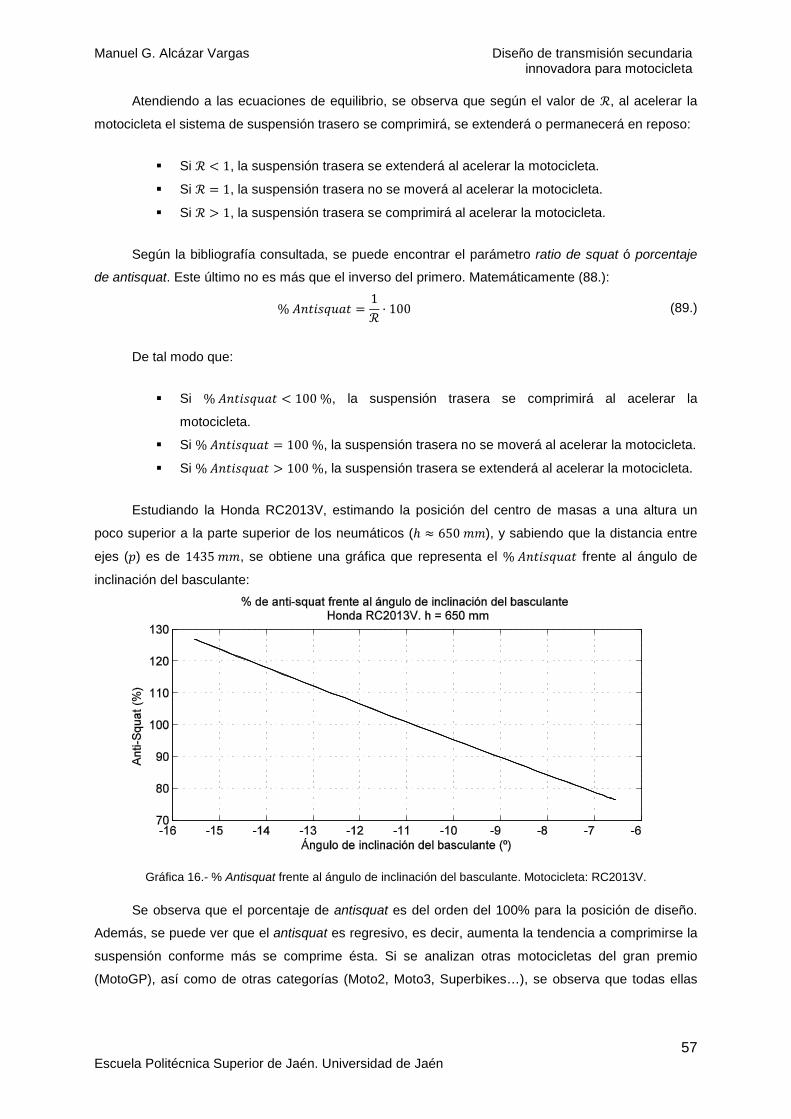
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
57 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Atendiendo a las ecuaciones de equilibrio, se observa que según el valor de ℛ, al acelerar la
motocicleta el sistema de suspensión trasero se comprimirá, se extenderá o permanecerá en reposo:
Si ℛ < 1, la suspensión trasera se extenderá al acelerar la motocicleta.
Si ℛ = 1, la suspensión trasera no se moverá al acelerar la motocicleta.
Si ℛ > 1, la suspensión trasera se comprimirá al acelerar la motocicleta.
Según la bibliografía consultada, se puede encontrar el parámetro ratio de squat ó porcentaje
de antisquat. Este último no es más que el inverso del primero. Matemáticamente (88.):
% 𝐴𝐴𝑠𝑠𝑡𝑡𝑑𝑑𝑠𝑠𝐴𝐴𝐴𝐴𝐶𝐶𝑡𝑡 =1ℛ
· 100 (89.)
De tal modo que:
Si % 𝐴𝐴𝑠𝑠𝑡𝑡𝑑𝑑𝑠𝑠𝐴𝐴𝐴𝐴𝐶𝐶𝑡𝑡 < 100 %, la suspensión trasera se comprimirá al acelerar la
motocicleta.
Si % 𝐴𝐴𝑠𝑠𝑡𝑡𝑑𝑑𝑠𝑠𝐴𝐴𝐴𝐴𝐶𝐶𝑡𝑡 = 100 %, la suspensión trasera no se moverá al acelerar la motocicleta.
Si % 𝐴𝐴𝑠𝑠𝑡𝑡𝑑𝑑𝑠𝑠𝐴𝐴𝐴𝐴𝐶𝐶𝑡𝑡 > 100 %, la suspensión trasera se extenderá al acelerar la motocicleta.
Estudiando la Honda RC2013V, estimando la posición del centro de masas a una altura un
poco superior a la parte superior de los neumáticos (ℎ ≈ 650 𝑚𝑚𝑚𝑚), y sabiendo que la distancia entre
ejes (𝑝𝑝) es de 1435 𝑚𝑚𝑚𝑚, se obtiene una gráfica que representa el % 𝐴𝐴𝑠𝑠𝑡𝑡𝑑𝑑𝑠𝑠𝐴𝐴𝐴𝐴𝐶𝐶𝑡𝑡 frente al ángulo de
inclinación del basculante:
Gráfica 16.- % Antisquat frente al ángulo de inclinación del basculante. Motocicleta: RC2013V.
Se observa que el porcentaje de antisquat es del orden del 100% para la posición de diseño.
Además, se puede ver que el antisquat es regresivo, es decir, aumenta la tendencia a comprimirse la
suspensión conforme más se comprime ésta. Si se analizan otras motocicletas del gran premio
(MotoGP), así como de otras categorías (Moto2, Moto3, Superbikes…), se observa que todas ellas

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
58 Escuela Politécnica Superior de Jaén. Universidad de Jaén
son semejantes en este aspecto: presentan un porcentaje de antisquat del orden del 100 % en la
posición de diseño y éste es regresivo.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
59 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.2. Anejo 2: Cálculo analítico de la fuerza de contacto neumático-suelo
Para determinar de un modo analítico la fuerza de contacto entre el suelo y el neumático, se ha
supuesto un sistema vibrante como el que muestra la Figura 22. Este se encuentra formado por una
masa 𝑚𝑚 que oscila, sujeta por un sistema de muelle-amortiguador, cuyas constantes elástica y
amortiguadora son 𝑘𝑘 y 𝑐𝑐 respectivamente.
Figura 22.- Ejemplo de movimiento oscilatorio impuesto por las irregularidades del terreno. 1 grado de libertad. Fuente: (Cossalter, dinamoto)
El modelado matemático del sistema viene dado por la ecuación diferencial (89.):
�̈�𝑦𝐸𝐸𝑅𝑅 · 𝑚𝑚 + �̇�𝑦𝐸𝐸𝑅𝑅 · 𝑐𝑐 + 𝑦𝑦𝐸𝐸𝑅𝑅 · 𝑘𝑘 = 𝐹𝐹𝐶𝐶 (90.)
Dado que la coordenada vertical del eje de la rueda (𝑦𝑦𝐸𝐸𝑅𝑅) es conocida, derivando
numéricamente dicha expresión se obtienen la velocidad y aceleración lineal de la coordenada
vertical del eje de la rueda en función del tiempo. De este modo, todo es conocido menos la fuerza de
contacto 𝐹𝐹𝐶𝐶. Este sistema se ha modelado en Matlab®. Los parámetros del sistema vibrante se han
estimado de la siguiente manera:
𝑚𝑚: masa no suspendida del sistema vibrante. Se ha estimado en 17 kg, en base al
trabajo de (Mercado Colmenero, 2014).
𝑘𝑘: rigidez reducida del muelle. Se ha estimado en 20 N/mm, en base al trabajo de
(Mercado Colmenero, 2014).
𝑐𝑐: coeficiente de amortiguamiento equivalente del sistema. Se ha estimado como la
mitad del coeficiente de amortiguamiento crítico del sistema (𝑐𝑐𝐶𝐶). Este último viene
determinado por la expresión (90.):
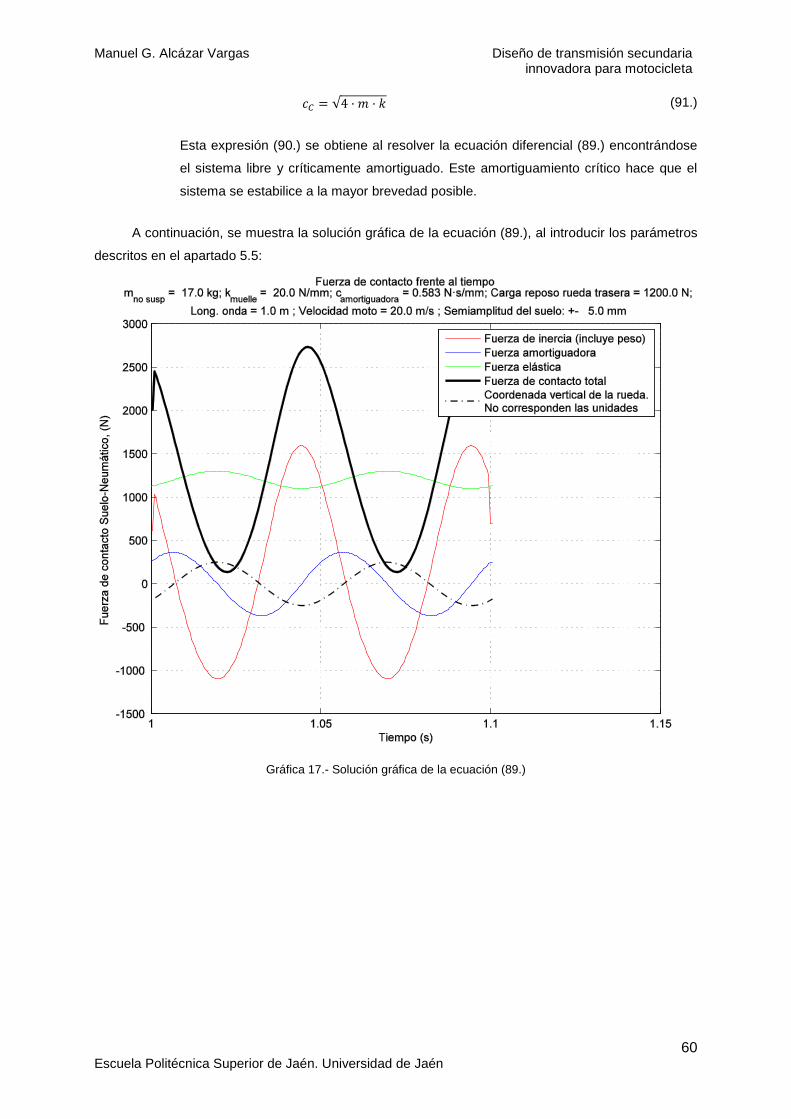
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
60 Escuela Politécnica Superior de Jaén. Universidad de Jaén
𝑐𝑐𝐶𝐶 = √4 · 𝑚𝑚 · 𝑘𝑘 (91.)
Esta expresión (90.) se obtiene al resolver la ecuación diferencial (89.) encontrándose
el sistema libre y críticamente amortiguado. Este amortiguamiento crítico hace que el
sistema se estabilice a la mayor brevedad posible.
A continuación, se muestra la solución gráfica de la ecuación (89.), al introducir los parámetros
descritos en el apartado 5.5:
Gráfica 17.- Solución gráfica de la ecuación (89.)
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
61 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.3. Anejo 3: Códigos programados en Matlab® durante el desarrollo del trabajo
7.3.1. Código raíz clear all; close all; clc; %% Declaramos globales las variables global t A Y_EB X_EB R_RT L_B Lambda V_S PHI_0 R_C R_P t_min t_max k Decalaje_X Decalaje_Y X_PC Y_PC ... TAN_PHI X_EP Y_EP tau n Y_S0 X_ER Y_ER Dist_Corona_Pinon Angulo_Transmision Angulo_Basculante ... Angulo_Transmision_Angulo_Cadena Angulo_Cadena Delta h d m; %% Descripción de las variables de entrada % A = Semiamplitud de la onda suelo (m) % Lambda= Longitud de onda suelo (m) % V_S = Velocidad lineal del suelo (m/s) % X_EB = Coordenada x del eje del basculante (m) % Y_EB = Coordenada y del eje del basculante (m) % L_B = Longitud del basculante (m) % PHI_0 = Ángulo del basculante en posición natural (rad) % R_RT = Radio de la rueda trasera (m) % R_C = Radio de la corona (m) % R_P = Radio del piñón (m) % t_min = Instante de tiempo en el que comenzamos la simulación (s) % t_max = Instante de tiempo en el que terminamos la simulación (s) % k = paso de tiempo (s) %% Descripción de las variables de salida % n = Número de puntos simulados (Ec XX) % tau = Relación de transmisión % t = Instante de tiempo en el que se resuelve el sistema de ecuaciones % X = Vector con cada una de las cinco soluciones del sistema % Esto es lo que significa cada x(i) del sistema de ecuaciones: % x (1) = Coordenada x del punto de contacto del suelo (m) % x (2) = Coordenada y del punto de contacto del suelo (m) % x (3) = Coordenada x del eje de la rueda (m) % x (4) = Coordenada x del eje de la rueda (m) % x (5) = pendiente del terreno en el punto de contacto (tangente del ángulo en radianes) %% Definimos los parámetros de entrada contador = 1; instante = 1.01; % load contador.mat variable = [50, 70, 100, 150, 200].*1e-3; % variable(contador); A = 5e-3; Lambda =1.000; % Lambda min = sqrt(4*pi^2*A*R_RT); V_S = 20.000;
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
62 Escuela Politécnica Superior de Jaén. Universidad de Jaén
X_EB = 1000e-3; Y_EB = 500e-3; L_B = 650*1e-3; % variable = [400 500 600 700 800].*1e-3; % L_B = variable(contador); PHI_0 = deg2rad(-11); % variable = [-20, -10, 0, 10, 20]; % PHI_0 = deg2rad(variable(contador)); R_RT = 310e-3; R_C = 100e-3; % variable(contador); % 100*1e-3; % variable = [50, 70, 100, 150, 200].*1e-3; R_P = 0.38*R_C; % 38*1e-3; k = .5e-3; t_min = 1; t_max = 1.10; Decalaje_X = -85*1e-3; % variable(contador)*cos(-PHI_0); % Distancia horizontal del eje del basculante al eje del piñón Decalaje_Y = +17*1e-3;% -variable(contador)*sin(-PHI_0); % Distancia vertical del eje del basculante al eje del piñón d = 1435e-3; % Distancia entre ejes, (m) h = d/2.2; % Altura del centro de gravedad (m) m = 240; % masa del conjunto moto + piloto (kg) %% Llamamos a la función que nos calcula la posición con los parámetros de entrada anteriores calcular_posicion = 1; if calcular_posicion save variables.mat; posicion; end load variables.mat clc; %% Mostramos las velocidades medias % Calculamos la longitud de arco del suelo (función seno) f = @(s) sqrt(1+(2*pi*A/Lambda).^2*cos(2*pi*s/Lambda).^2); Long = integral(f,0,Lambda); Periodo = Lambda/V_S; Vel_Ang_Media = Long/Periodo/R_RT; Omega_Adherencia_Deg = rad2deg(Omega_RT); Omega_Inercia_Deg = rad2deg(mean(Omega_RT) + factor_Omega_Rueda.*Omega_Basculante); Adelantamiento = 0; Retraso = 0; for i = 1:n if Omega_Inercia_Deg(i) - Omega_Adherencia_Deg(i) > 0 Adelantamiento = Adelantamiento + (Omega_Inercia_Deg(i) - Omega_Adherencia_Deg(i)); else

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
63 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Retraso = Retraso - (Omega_Inercia_Deg(i) - Omega_Adherencia_Deg(i)); end end Adelantamiento = deg2rad(Adelantamiento)*k*R_RT; Retraso = deg2rad(Retraso)*k*R_RT; save variables.mat %% Pintamos las gráficas dibujar_moto = true; if dibujar_moto CodigoFuerzaContacto_02; pintar_moto(instante); pintar_factor; end guardar_grafica = true; if guardar_grafica print(figure(1),'-depsc2','Grafica_moto.eps'); % print(figure(1),'-dpng','Grafica_moto.png','-r900'); end Codigo_Squat load variables.mat fprintf('Velocidad media debe ser = %5.4f º/s \n',rad2deg(Vel_Ang_Media)); % Esto está bien fprintf('Velocidad media con adherencia infinita = %5.4f º/s \n',mean(rad2deg(Omega_RT))); fprintf('Velocidad media con inercia infinita = %5.4f º/s \n',mean(rad2deg(mean(Omega_RT) + factor_Omega_Rueda.*Omega_Basculante))); fprintf('Máxima diferencia de velocidades angulares (Adherencia infinita) = %5.4f º/s \n\n',rad2deg(max(Omega_RT)-min(Omega_RT))); fprintf('Debido a la inercia infinita del motor, en un tramo la rueda se ha adelantado %5.1f mm \n',Adelantamiento*1e3); fprintf('Debido a la inercia infinita del motor, en un tramo la rueda se ha retrasado %5.1f mm \n',Retraso*1e3); %% Guardamos las gráficas if true print(figure(1),'-depsc2','Figura_1.eps'); end

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
64 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.3.2. Código para determinar la posición del sistema en función del tiempo
function [X] = posicion %% Descripción de las variables de entrada % A = Semiamplitud de la onda suelo (m) % Lambda= Longitud de onda suelo (m) % V_S = Velocidad lineal del suelo (m/s) % X_EB = Coordenada x del eje del basculante (m) % Y_EB = Coordenada y del eje del basculante (m) % L_B = Longitud del basculante (m) % PHI_0 = Ángulo del basculante en posición natural (rad) % R_RT = Radio de la rueda trasera (m) % R_C = Radio de la corona (m) % R_P = Radio del piñón (m) % t_min = Instante de tiempo en el que comenzamos la simulación (s) % t_max = Instante de tiempo en el que terminamos la simulación (s) % k = paso de tiempo (s) %% Descripción de las variables de salida % n = Número de puntos simulados (Ec XX) % tau = Relación de transmisión % t = Instante de tiempo en el que se resuelve el sistema de ecuaciones % X = Vector con cada una de las cinco soluciones del sistema % Esto es lo que significa cada x(i) del sistema de ecuaciones: % x (1) = Coordenada x del punto de contacto del suelo (m) % x (2) = Coordenada y del punto de contacto del suelo (m) % x (3) = Coordenada x del eje de la rueda (m) % x (4) = Coordenada x del eje de la rueda (m) % x (5) = pendiente del terreno en el punto de contacto (tangente del ángulo en radianes) %% Comienzo del código de la función global t A Y_EB X_EB R_RT L_B Lambda V_S PHI_0 R_C R_P t_min t_max k Decalaje_X Decalaje_Y X_PC Y_PC TAN_PHI X_EP Y_EP tau n Y_S0 X_ER Y_ER Dist_Corona_Pinon ... Angulo_Transmision Angulo_Basculante Angulo_Transmision_Angulo_Cadena Angulo_Cadena Delta; % Obtenemos los parámetros derivados de los parámetros principales: t = t_min; tau = R_P/R_C; n = ceil(((t_max-t_min)/k)+1); t_max = t_min + (n-1)*k; Y_S0 = Y_EB - R_RT + L_B*sin(PHI_0); % Eje del suelo X_EP = X_EB + Decalaje_X; Y_EP = Y_EB + Decalaje_Y;
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
65 Escuela Politécnica Superior de Jaén. Universidad de Jaén
% Proponemos una solución inicial para comenzar a iterar x0(1) = X_EB + L_B*cos(PHI_0); x0(2) = Y_EB - R_RT + L_B*sin(PHI_0); % Eje del suelo x0(3) = x0(1); x0(4) = x0(2) + R_RT; x0(5) = 0; for cont = 1:n options = optimoptions ('fsolve', 'Display', 'iter'); [x,fval] = fsolve ( @myfun,x0,options); t = t+k; x0 = x; % Proponemos la solución inicial para el siguiente instante de tiempo la que hemos obtenido ahora X(cont,:) = x; % Guardamos cada caso en una matriz llamada X X_PC(cont) = X(cont,1); % Coordenada x del punto de contacto del suelo (m) Y_PC(cont) = X(cont,2); % Coordenada y del punto de contacto del suelo (m) X_ER(cont) = X(cont,3); % Coordenada x del eje de la rueda (m) Y_ER(cont) = X(cont,4); % Coordenada x del eje de la rueda (m) TAN_PHI(cont) = X(cont,5); % pendiente del terreno en el punto de contacto (tangente del ángulo en radianes) Dist_Corona_Pinon(cont) = sqrt((Y_ER(cont) - Y_EP)^2 + (X_ER(cont) - X_EP)^2 ); % Distancia entre el eje del piñón y el eje del suelo Angulo_Transmision(cont) = atan((Y_ER(cont) - Y_EP) / (X_ER(cont) - X_EP)); % Ángulo que forma la línea que une los ejes del piñón y la corona con el suelo Angulo_Basculante(cont) = atan((Y_ER(cont) - Y_EB) / (X_ER(cont) - X_EB)); % Ángulo que forma la línea que une los ejes del basculante y la rueda con el suelo Angulo_Transmision_Angulo_Cadena(cont) = asin((R_C - R_P) / Dist_Corona_Pinon(cont)); Angulo_Cadena(cont) = Angulo_Transmision(cont) + Angulo_Transmision_Angulo_Cadena(cont); Delta(cont) = Angulo_Cadena(cont) - Angulo_Basculante(cont); V_RT(cont) = V_S * cos(Angulo_Basculante(cont)) / (cos(atan(TAN_PHI(cont)) - Angulo_Basculante(cont))); Omega_RT(cont) = V_RT(cont) / R_RT; end X_Cadena_Rueda_Sup = X_ER - R_C * sin(Angulo_Cadena); Y_Cadena_Rueda_Sup = Y_ER + R_C * cos(Angulo_Cadena); X_Cadena_Pinon_Sup = X_EP - R_P * sin(Angulo_Cadena); Y_Cadena_Pinon_Sup = Y_EP + R_P * cos(Angulo_Cadena); Long_Cadena = sqrt((X_Cadena_Rueda_Sup - X_Cadena_Pinon_Sup).^2+(Y_Cadena_Rueda_Sup - Y_Cadena_Pinon_Sup).^2); Angulo_EB_PC_Corona = atan((Y_Cadena_Rueda_Sup - Y_EB) ./ (X_Cadena_Rueda_Sup - X_EB)); Kappa = Angulo_EB_PC_Corona - Angulo_Cadena; %% Esta es la fórmula importante
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
66 Escuela Politécnica Superior de Jaén. Universidad de Jaén
% factor_Omega_Rueda = 1 - (L_B.*cos(Delta).*tan(Kappa)).*(1/R_C + 0./Long_Cadena); % factor_Omega_Rueda = ((L_B.*cos(Delta).*(tan(Kappa)./R_C - tau./Long_Cadena))); % L_EQ = sqrt(L_B^2 + R_C^2 - 2*L_B*R_C*sin(Delta)); % factor_Omega_Rueda = +(L_EQ./R_C .* (cos(Kappa + Delta).*R_P./Long_Cadena - sin(Kappa + Delta))) - (L_B.*sin(Delta)./R_C); % factor_Omega_Rueda = - (L_B.*sin(Delta)./R_C); %% Calculamos la cinemática del sistema (Condición de adherencia infinita) for cont = 1:n if cont == 1 || cont == n Alpha_RT(cont) = NaN; Omega_Basculante(cont) = NaN; else Alpha_RT(cont) = (1/(2*k))*(Omega_RT(cont+1) - Omega_RT(cont-1)); Omega_Basculante(cont) = (1/(2*k))*(Angulo_Basculante(cont+1) - Angulo_Basculante(cont-1)); end end Omega_Basculante(1) = Omega_Basculante(2); Omega_Basculante(n) = Omega_Basculante(n-1); Alpha_RT(1) = Alpha_RT(2); Alpha_RT(n) = Alpha_RT(n-1); %% Ahora la segunda parte del sumando e = sqrt((Y_ER - Y_EP).^2 + (X_ER - X_EP).^2); D = sqrt(Decalaje_X.^2 + Decalaje_Y.^2); if X_EB > X_EP sigma = atan((Y_EP - Y_EB)./(X_EP - X_EB))+pi; % Segundo y tercer cuadrante else sigma = atan((Y_EP - Y_EB)./(X_EP - X_EB)); % Primer y cuarto cuadrante end phi = Angulo_Basculante; L_Cad_Phi = L_B*D*(sin(phi + sigma)./sqrt(e.^2 - (R_C - R_P).^2)); phi_omega = L_B.*sin(Delta)./R_C; % + 1; % - R_P./R_C; nabla = phi-sigma; %% Este factor representa la derivada de beta (rueda trasera) con respecto a phi (ángulo del basculante) factor_Omega_Rueda = (tau-1).*(-((D.*cos(nabla)./e)-(D.^2.*L_B.*sin(nabla).^2/e.^3))./sqrt(1-(D.*sin(nabla)./e).^2) ...
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
67 Escuela Politécnica Superior de Jaén. Universidad de Jaén
+ (D.*L_B.*sin(nabla).*(R_C-R_P)./(e.^3.*sqrt(1-((R_C-R_P)./e).^2))) - 1) + ... D.*L_B.*sin(nabla)./(R_C.*Long_Cadena); %% Este factor representa la derivada de beta (rueda trasera) con respecto a phi (ángulo del basculante) factor_Omega_Motor = ((1-tau)/tau).*(-((D.*cos(nabla)./e)-(D.^2.*L_B.*sin(nabla).^2/e.^3))./sqrt(1-(D.*sin(nabla)./e).^2) ... + (D.*L_B.*sin(nabla).*(R_C-R_P)./(e.^3.*sqrt(1-((R_C-R_P)./e).^2))) - 1) - ... D.*L_B.*sin(nabla)./(R_P.*Long_Cadena); save variables.mat return %% Función que resuelve el sistema de ecuaciones function F = myfun(x) global t A Y_EB X_EB R_RT L_B Lambda V_S Y_S0; % Estas líneas de abajo son las más importantes. Este es el sistema de % ecuaciones que planteamos para encontrar la solución en cada instante F = [... x(3) - X_EB - sqrt(L_B^2 - (Y_EB - x(4))^2) ; ... x(2) - Y_S0 - A*sin(2*pi/Lambda*(x(1) - t*V_S)) ; ... x(3) - x(1) + R_RT*(x(5)/sqrt(1 + x(5)^2)) ; ... x(4) - x(2) - R_RT*(1/sqrt(1 + x(5)^2)) ; ... x(5) - A*2*pi/Lambda*cos(2*pi/Lambda*(x(1) - t*V_S))... ]; return
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
68 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.3.3. Código empleado para elaborar algunas gráficas clear all; close all; clc; load variables.mat; %% Definimos parámetros m_no_susp = 17; % Masa de la rueda trasera (kg) k_muelle = 2e4; % Constante elástica equivalente (N/m) c_amort = sqrt(4*k_muelle*m_no_susp)/2; % Constante amortiguadora equivalente (N·s/m) c = sqrt(4·k·m) carga_trasera = 1200; x0 = carga_trasera/k_muelle; % Precarga equivalente del muelle (m) g = 9.8; % Aceleración de la gravedad (m/s^2) %% Definimos ecuaciones y0R = Y_ER - mean(Y_ER); numpuntos = length(y0R); % Derivada primera for i = 2:numpuntos-1 y1R(i) = (1/(2*k))*(y0R(i+1)-y0R(i-1)); end y1R(1)=y1R(2); y1R(numpuntos)=y1R(numpuntos-1); % Derivada segunda for i = 2:numpuntos-1 y2R(i) = (1/(2*k))*(y1R(i+1)-y1R(i-1)); end y2R(1)=y2R(2); y2R(numpuntos)=y2R(numpuntos-1); t = linspace(t_min,t_max,numpuntos); Finer = +m_no_susp.*y2R + m_no_susp*g; % Fuerza de inercia (m·a) Famor = +c_amort.*y1R; % Fuerza amortiguadora (m·v) Felas = +k_muelle.*(y0R+x0); % Fuerza elástica (k·(x + x0)) Fc = Finer + Famor + Felas; %% Pintamos figure('units','normalized','outerposition',[0 0.3 1 .7]) plot(t,Finer,'r',t,Famor,'b',t,Felas,'g');hold on; plot(t,Fc,'k','LineWidth',2) plot(t,y0R.*50000,'-.k','LineWidth',1) % title('Fuerza de contacto frente al tiempo'); title(sprintf('Fuerza de contacto frente al tiempo \n m_{no susp} = %5.1f kg; k_{muelle} = %5.1f N/mm; c_{amortiguadora} = %5.3f N·s/mm; Carga reposo rueda trasera = %5.1f N; \n Long. onda = %3.1f m ; Velocidad moto = %3.1f m/s ; Semiamplitud del suelo: +- %5.1f mm',m_no_susp,k_muelle*1e-3, c_amort*1e-3, carga_trasera,Lambda,V_S,A*1e3)); % title(sprintf('Aceleración angular del piñón frente al tiempo en función de la longitud del basculante. \n Adherencia infinita. Velocidad de la moto
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
69 Escuela Politécnica Superior de Jaén. Universidad de Jaén
constante. Motocicleta: RC2013V \n Long. onda = %3.1f m ; Velocidad moto = %3.1f m/s ; Semiamplitud del suelo: +- %5.1f mm', Lambda,V_S,A*1e3)); xlabel('Tiempo (s)'); ylabel('Fuerza de contacto Suelo-Neumático, (N)'); hleg1=legend('Fuerza de inercia (incluye peso)','Fuerza amortiguadora','Fuerza elástica','Fuerza de contacto total',sprintf('Coordenada vertical de la rueda. \nNo corresponden las unidades')); grid on; % set(hleg1,'Location','NorthWest'); print(figure(1),'-depsc2','FcontactoMarquez.eps'); print(figure(1),'-dpng','FcontactoMarquez','-r900'); save(sprintf('FuerzaContacto%i.mat',contador),'Fc'); save('FuerzaContactoMarquez.mat','Fc'); save variables.mat
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
70 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.3.4. Código empleado en pintar las velocidades y aceleraciones de la rueda trasera
function salida = pintar_factor load variables.mat %% Comenzamos a pintar clc; figure('units','normalized','outerposition',[0.5 0 .5 .5]) plot ( rad2deg(Angulo_Basculante),factor_Omega_Rueda,'k','LineWidth',2); xlabel('Ángulo de inclinación del basculante (º)'); ylabel('Factor (adim)'); title('Factor Omega-Rueda frente al ángulo de inclinación del basculante'); p = polyfit(rad2deg(Angulo_Basculante),factor_Omega_Rueda,1); grid on; %% Para mostrar Inercia Inf y Adherencia Inf % figure('units','normalized','outerposition',[0 0 1 1]) % ejetiempo = t_min:k:t_max; % plot ( ejetiempo,rad2deg(Omega_RT),'r',... % ejetiempo,rad2deg(mean(Omega_RT) + factor_Omega_Rueda.*Omega_Basculante),'b',... % ejetiempo,Y_ER*100 + 140,'-.k','LineWidth',2); % title('Velocidad angular de la rueda frente al tiempo. Distintas hipótesis. Velocidad de la moto constante'); % xlabel('Tiempo (s)'); % ylabel('Velocidad angular de la rueda (º/s)'); % h = legend('Adherencia infinita','Inercia infinita',sprintf('Coordenada "y" eje de la rueda. \n(No corresponden las unidades del eje "y")')); % grid on; % print(figure(3),'-depsc2','Velocidad-Angular-combinado.eps'); %% Para mostrar Adherencia Inf figure('units','normalized','outerposition',[0 0 1 1]) ejetiempo = t_min:k:t_max; plot ( ejetiempo,rad2deg(Omega_RT),'r',... ejetiempo,Y_ER*100 + 100,'-.k','LineWidth',2); title('Velocidad angular de la rueda frente al tiempo. Adherencia infinita. Velocidad de la moto constante'); xlabel('Tiempo (s)'); ylabel('Velocidad angular de la rueda (º/s)'); h = legend('Adherencia infinita',sprintf('Coordenada "y" eje de la rueda. \n(No corresponden las unidades del eje "y")')); grid on; print(figure(3),'-depsc2','Velocidad-Angular-Adherencia.eps'); %% Para mostrar Inercia Inf % figure('units','normalized','outerposition',[0 0 1 1]) % ejetiempo = t_min:k:t_max; % plot ( ejetiempo,rad2deg(mean(Omega_RT) + factor_Omega_Rueda.*Omega_Basculante),'b',... % ejetiempo,Y_ER*100 + 140,'-.k','LineWidth',2); % title('Velocidad angular de la rueda frente al tiempo. Inercia infinita. Velocidad de la moto constante'); % xlabel('Tiempo (s)'); % ylabel('Velocidad angular de la rueda (º/s)');
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
71 Escuela Politécnica Superior de Jaén. Universidad de Jaén
% h = legend('Inercia infinita',sprintf('Coordenada "y" eje de la rueda. \n(No corresponden las unidades del eje "y")')); % grid on; % print(figure(3),'-depsc2','Velocidad-Angular-Inercia.eps'); %% Para mostrar Velocidad angular del motor con adherencia infinita % % omegamotor = rad2deg(Omega_RT)./tau + rad2deg(factor_Omega_Motor.*Omega_Basculante); % figure('units','normalized','outerposition',[0 0 1 1]) % ejetiempo = t_min:k:t_max; % plot ( ejetiempo,omegamotor,'g','LineWidth',2); hold on; % plot(ejetiempo,Y_ER*500 + 300 ,'-.k','LineWidth',2); % title('Velocidad angular del piñón frente al tiempo. Adherencia infinita. Velocidad de la moto constante'); % xlabel('Tiempo (s)'); % ylabel('Velocidad angular del piñón (º/s)'); % h = legend('Velocidad angular del piñón. Adherencia infinita',sprintf('Coordenada "y" eje de la rueda. \n(No corresponden las unidades del eje "y")')); % grid on; % print(figure(4),'-depsc2','Velocidad-Angular-Motor.eps'); % % save(sprintf('omegamotor%i.mat',contador),'omegamotor'); %% Para mostrar Velocidad angular del motor con adherencia infinita omegamotor = rad2deg(Omega_RT)./tau + rad2deg(factor_Omega_Motor.*Omega_Basculante); media = mean(omegamotor); omegamotorPorCien = omegamotor./media.*100; figure('units','normalized','outerposition',[0 0 1 1]) ejetiempo = t_min:k:t_max; plot ( ejetiempo,omegamotorPorCien,'g','LineWidth',2); hold on; plot(ejetiempo,Y_ER*100 + 70 ,'-.k','LineWidth',2); title(sprintf('Velocidad angular del piñón frente al tiempo. Adherencia infinita. Velocidad de la moto constante \n Velocidad media del motor = %5.1f º/s',media)); xlabel('Tiempo (s)'); ylabel('Velocidad angular del motor respecto a la velocidad media del mismo (%)'); h = legend('Velocidad angular del piñón. Adherencia infinita',sprintf('Coordenada "y" eje de la rueda. \n(No corresponden las unidades del eje "y")')); grid on; print(figure(4),'-depsc2','Velocidad-Angular-Motor-Porciento.eps'); save(sprintf('omegamotor%i.mat',contador),'omegamotor'); %% Calculamos la aceleración numpuntos = length(omegamotor); for i = 2:numpuntos-1 acelmotor(i) = (1/(2*k))*(omegamotor(i+1)-omegamotor(i-1)); end
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
72 Escuela Politécnica Superior de Jaén. Universidad de Jaén
acelmotor(1) = acelmotor(2); acelmotor(numpuntos) = acelmotor(numpuntos-1); % save(sprintf('acelmotormarquez.mat',contador),'acelmotor'); save(sprintf('acelmotor%i.mat',contador),'acelmotor'); %% Para mostrar Adherencia Inf Aceleración tamano = length(Omega_RT); for i = 2:tamano-1 acelrueda(i) = 1/(2*k)*(Omega_RT(i+1) - Omega_RT(i-1)); end acelrueda(1) = acelrueda(2); acelrueda(tamano) = acelrueda(tamano-1); figure('units','normalized','outerposition',[0 0 1 1]) ejetiempo = t_min:k:t_max; plot ( ejetiempo,rad2deg(acelrueda),'r',... ejetiempo,(Y_ER - mean(Y_ER))*100000,'-.k','LineWidth',2); title('Aceleración angular de la rueda frente al tiempo. Adherencia infinita. Velocidad de la moto constante'); xlabel('Tiempo (s)'); ylabel('Aceleración angular de la rueda (º/s^2)'); h = legend('Adherencia infinita',sprintf('Coordenada "y" eje de la rueda. \n(No corresponden las unidades del eje "y")')); grid on; print(figure(5),'-depsc2','Aceleracion-Angular-Adherencia.eps'); save variables.mat end

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
73 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.3.5. Código empleado en representar la Gráfica 15
%% Gráfica Final close all; clc; % Definimos los parámetros de entrada T_motriz = 83; % Par efectivo en el cigüeñal (N·m) I_motor = 0.05; % Momento de inercia del motor en el cigüeñal (kg·m2) I_rueda = 0.8; % Momento de inercia de la rueda en su eje (kg·m2) tauMP = 1/1.717; % 21/70; % Relación de transmisión primaria tauPS = 1/2.286; % 17/30; % Relación de transmisión en la caja de cambios tauSR = 1/2.625; % 17/45; % Relación de transmisión secundaria alphaM = deg2rad(acelmotor); % aceleración angular del piñón motor (rad/s2) alphaR = Alpha_RT; % aceleración angular de la rueda (rad/s2) velgiromotor = V_S/(tauMP*tauSR*tauPS*R_RT)*60/(2*pi); % Establecemos equilibrio de pares en el piñón del motor T_rueda = (I_rueda.*tauSR.^2).*alphaR./tauSR; % Par resistente en el piñón debido a la inercia de la rueda T_motor = (I_motor./(tauMP.*tauPS).^2).*alphaM; % Par resistente en el piñón debido a la inercia del motor T_generado = T_motriz./(tauMP.*tauPS) + T_rueda.*0; % Par generado por el motor en el eje del piñón T_disponible = T_generado - T_motor - T_rueda; %% Gráfica Dimensional figure('units','normalized','outerposition',[0 0 1 1]) subplot(2,1,1); plot(ejetiempo,T_generado,'g','LineWidth',1); hold on; plot(ejetiempo,T_motor,'r','LineWidth',1); plot(ejetiempo,T_rueda,'b','LineWidth',1); plot(ejetiempo,T_disponible,'k','LineWidth',2); h = legend(sprintf('Par generado por el motor (constante)'),... 'Par absorbido por el motor (I_M·\alpha_M)',... 'Par absorbido por la rueda (I_R·\alpha_R)',... 'Par efectivo disponible en el eje del piñón'); title(sprintf('Par diponible en el piñón motor. \n Adherencia infinita. Velocidad de la moto constante. Geometría: RC2013V \n Long. onda = %3.1f m ; Velocidad moto = %3.1f m/s ; Semiamplitud del suelo: +- %5.1f mm', Lambda,V_S,A*1e3)); xlabel('Tiempo (s)'); ylabel('Par disponible en el piñón motor (N·m)'); grid on;
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
74 Escuela Politécnica Superior de Jaén. Universidad de Jaén
subplot(2,1,2); plot(ejetiempo,Fc,'k','LineWidth',2); title(sprintf('Fuerza de contacto frente al tiempo \n m_{no susp} = %5.1f kg; k_{muelle} = %5.1f N/mm; c_{amortiguadora} = %5.3f N·s/mm; Carga reposo rueda trasera = %5.1f N; ',m_no_susp,k_muelle*1e-3, c_amort*1e-3, carga_trasera)); xlabel('Tiempo (s)'); ylabel('Fuerza de contacto Suelo-Neumático, (N)'); h; grid on; print(figure(1),'-depsc2','EquilibrioParesEjemplo1.eps'); % print(figure(1),'-dpng','EquilibrioParesEjemplo1.png','-r900'); %% Gráfica Adimensional figure('units','normalized','outerposition',[0 0 1 1]) subplot(2,1,1); plot(ejetiempo,T_generado./T_generado.*100,'g','LineWidth',1); hold on; plot(ejetiempo,T_motor./T_generado.*100,'r','LineWidth',1); plot(ejetiempo,T_rueda./T_generado.*100,'b','LineWidth',1); plot(ejetiempo,T_disponible./T_generado.*100,'k','LineWidth',2); h = legend(sprintf('Par generado por el motor (constante)'),... 'Par absorbido por el motor (I_M·\alpha_M)',... 'Par absorbido por la rueda (I_R·\alpha_R)',... 'Par efectivo disponible en el eje del piñón'); title(sprintf('Par diponible en el piñón motor / Par generado (%%) \n Adherencia infinita. Velocidad de la moto constante. Geometría: RC2013V \n Long. onda = %3.1f m ; Velocidad moto = %3.1f m/s ; Semiamplitud del suelo: +- %5.1f mm', Lambda,V_S,A*1e3)); xlabel('Tiempo (s)'); ylabel(sprintf('Par disponible en el piñón motor \n (%% del par generado)')); grid on; subplot(2,1,2); plot(ejetiempo,Fc,'k','LineWidth',2); title(sprintf('Fuerza de contacto frente al tiempo \n m_{no susp} = %5.1f kg; k_{muelle} = %5.1f N/mm; c_{amortiguadora} = %5.3f N·s/mm; Carga reposo rueda trasera = %5.1f N; ',m_no_susp,k_muelle*1e-3, c_amort*1e-3, carga_trasera)); xlabel('Tiempo (s)'); ylabel('Fuerza de contacto Suelo-Neumático, (N)'); h; grid on; print(figure(2),'-depsc2','EquilibrioParesEjemplo2.eps'); % print(figure(2),'-dpng','EquilibrioParesEjemplo2.png','-r900');
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
75 Escuela Politécnica Superior de Jaén. Universidad de Jaén
7.3.6. Código empleado en evaluar la ecuación diferencial del sistema vibrante
clear all; close all; clc; load variables.mat; %% Definimos parámetros m_no_susp = 17; % Masa de la rueda trasera (kg) k_muelle = 2e4; % Constante elástica equivalente (N/m) c_amort = sqrt(4*k_muelle*m_no_susp)/2; % Constante amortiguadora equivalente (N·s/m) c = sqrt(4·k·m) carga_trasera = 1200; x0 = carga_trasera/k_muelle; % Precarga equivalente del muelle (m) g = 9.8; % Aceleración de la gravedad (m/s^2) %% Definimos ecuaciones y0R = Y_ER - mean(Y_ER); numpuntos = length(y0R); % Derivada primera for i = 2:numpuntos-1 y1R(i) = (1/(2*k))*(y0R(i+1)-y0R(i-1)); end y1R(1)=y1R(2); y1R(numpuntos)=y1R(numpuntos-1); % Derivada segunda for i = 2:numpuntos-1 y2R(i) = (1/(2*k))*(y1R(i+1)-y1R(i-1)); end y2R(1)=y2R(2); y2R(numpuntos)=y2R(numpuntos-1); t = linspace(t_min,t_max,numpuntos); Finer = +m_no_susp.*y2R + m_no_susp*g; % Fuerza de inercia (m·a) Famor = +c_amort.*y1R; % Fuerza amortiguadora (m·v) Felas = +k_muelle.*(y0R+x0); % Fuerza elástica (k·(x + x0)) Fc = Finer + Famor + Felas; %% Pintamos figure('units','normalized','outerposition',[0 0.3 1 .7]) plot(t,Finer,'r',t,Famor,'b',t,Felas,'g');hold on; plot(t,Fc,'k','LineWidth',2) plot(t,y0R.*50000,'-.k','LineWidth',1) % title('Fuerza de contacto frente al tiempo'); title(sprintf('Fuerza de contacto frente al tiempo \n m_{no susp} = %5.1f kg; k_{muelle} = %5.1f N/mm; c_{amortiguadora} = %5.3f N·s/mm; Carga reposo rueda trasera = %5.1f N; \n Long. onda = %3.1f m ; Velocidad moto = %3.1f
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
76 Escuela Politécnica Superior de Jaén. Universidad de Jaén
m/s ; Semiamplitud del suelo: +- %5.1f mm',m_no_susp,k_muelle*1e-3, c_amort*1e-3, carga_trasera,Lambda,V_S,A*1e3)); % title(sprintf('Aceleración angular del piñón frente al tiempo en función de la longitud del basculante. \n Adherencia infinita. Velocidad de la moto constante. Motocicleta: RC2013V \n Long. onda = %3.1f m ; Velocidad moto = %3.1f m/s ; Semiamplitud del suelo: +- %5.1f mm', Lambda,V_S,A*1e3)); xlabel('Tiempo (s)'); ylabel('Fuerza de contacto Suelo-Neumático, (N)'); hleg1=legend('Fuerza de inercia (incluye peso)','Fuerza amortiguadora','Fuerza elástica','Fuerza de contacto total',sprintf('Coordenada vertical de la rueda. \nNo corresponden las unidades')); grid on; % set(hleg1,'Location','NorthWest'); print(figure(1),'-depsc2','FcontactoMarquez.eps'); print(figure(1),'-dpng','FcontactoMarquez','-r900'); save(sprintf('FuerzaContacto%i.mat',contador),'Fc'); save('FuerzaContactoMarquez.mat','Fc'); save variables.mat
Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
77 Escuela Politécnica Superior de Jaén. Universidad de Jaén
Bibliografía
Alba Mata, P. (2013). Proyecto Fin de Carrera: Diseño de la transmisión secundaria de una motocicleta. Jaén: Universidad de Jaén.
Arias Paz, M. (2003). Motocicletas. CIE Dossat 2000.
Beer, F. (20074). Mecánica vectorial para ingenieros. Dinámica. McGrawHill.
Cossalter, V. (2013). Motorcycle Dynamics. Padova: Lulu.
Cossalter, V. (n.d.). dinamoto. Retrieved from http://www.dinamoto.it/
Cossalter, V., & Doria, A. (2013). Dinamica del veicolo. Padova: Universidad de Padova.
Foale, T. (2003). Comportamiento dinámico y diseño de chasis. El arte y la ciencia.
García Martínez, E. (2014). Trabajo Fin de Grado: Optimización estructural de elementos mecánicos: aplicación al chasis de una motocicleta de competición. Jaén: Universidad de Jaén.
López Liñán, Á. (2014). Trabajo Fin de Grado: Estudio cinemático y dinámico de suspensión delantera, no convencional, de motocicleta. Jaén: Universidad de Jaén.
Mercado Colmenero, J. (2014). Proyecto Fin de Carrera: Optimización diseño de suspensión trasera para motocicleta de competición. Jaén: Universidad de Jaén.
Moto Engineering Foundation. (2015). Motostudent. Obtenido de http://www.motostudent.com
Moto Engineering Foundation. (2015). Reglamento de la competición Motostudent 2015-2016. MEF.
MSC Adams. (2013). Documentation.
Norton, R. (1995). Diseño de maquinaria.
Shigley, J., & Mischke, C. (2002). Diseño en ingeniería mecánica. McGrawHill.
Tipler, P., & Mosca, G. (2010). Física para la ciencia y la tecnología. Volumen I. Mecánica/Oscilaciones y ondas/Termodinámica. Barcelona: Reverté.

Manuel G. Alcázar Vargas Diseño de transmisión secundaria innovadora para motocicleta
78 Escuela Politécnica Superior de Jaén. Universidad de Jaén