teoría de vibraciones
DESCRIPTION
Presentación de 66 diapositivas en formato .PDF que contiene ecuaciones y teoría básica de vibraciones.TRANSCRIPT
UNIVERSIDAD DE LOS ANDES
ESCUELA DE INGENIERÍA MECÁNICA
DEPARTAMENTO DE TECNOLOGÍA Y DISEÑO
Br. Antonio R. Molina S.
Cinemática y Dinámica de Partículas y Cuerpos Rígidos
Br. Antonio R. Molina S.Kraken Rollercoaster – Sea World, Orlando FL

Br. Antonio R. Molina S.
P (Xp, Yp, Zp)
r P/O
X
Y
Z
i
j
k
(R)
Sea r P/O el vector de posición de la partícula
P en el espacio respecto al sistema
coordenado global fijo R:
Su velocidad viene dada como la primera
derivada de la posición respecto al tiempo:
Y su aceleración como la segunda derivada
de la posición respecto al tiempo:

Br. Antonio R. Molina S.
Para el caso de cuerpos rígidos en el plano
conviene conocer la posición de su centro
de masa G respecto al sistema coordenado
global R mediante el vector de posición r G/O, cuya velocidad y aceleración vienen dados
de forma idéntica al caso estudiado para
partículas :
Luego si se desea la velocidad o aceleración
de otro punto P del cuerpo rígido, se recurre
a definir un vector r P/G desde el centro de masa al punto en cuestión, derivándose
relaciones adicionales:
G (XG, YG, 0)
r G/O
X
Y
Z
i
j
k
(R)
e1
e2
(R`)
ω, α
ω= Velocidad Angular
α= Aceleración Angular

Principio de la Cantidad de Movimiento Lineal
La sumatoria de las fuerzas que actúan en un
cuerpo equivale a la variación de la cantidad
de movimiento lineal del mismo en el tiempo.
Debido a que la masa del cuerpo no varía con
el tiempo, se obtiene la expresión de la segunda
ley de Newton:
Br. Antonio R. Molina S.
Crash Test – General Motors Company

Br. Antonio R. Molina S.
Principio de la Cantidad de Movimiento Angular
La sumatoria de los momentos que actúan en
un cuerpo equivale a la variación de la
cantidad de movimiento angular del mismo en
el tiempo:
La cantidad de movimiento angular puede
definirse respecto al centro de masa del cuerpo
o respecto al origen del sistema coordenado
global de referencia:El momento de inercia respecto al
origen puede calcularse según el
teorema de Steiner:
Rotor de Helicóptero – Bell Helicopter Textron Inc.
Resortes, Masas y Amortiguadores
Br. Antonio R. Molina S.Suspensión Delantera – Tuningarea.com

Br. Antonio R. Molina S.
Son el medio para acumular energía potencial del
sistema. También se les denomina elementos de rigidez
del sistema.
Resorte de Traslación: La fuerza que actúa en un resorte lineal puede determinarse con la siguiente expresión:
Donde k es la constante de resorte y x su deflexión. La energía potencial acumulada por este elemento se
determina integrando la expresión anterior:
Resorte de Torsión: Resortes Varios - Iran Fanar Lool Co.
Br. Antonio R. Molina S.
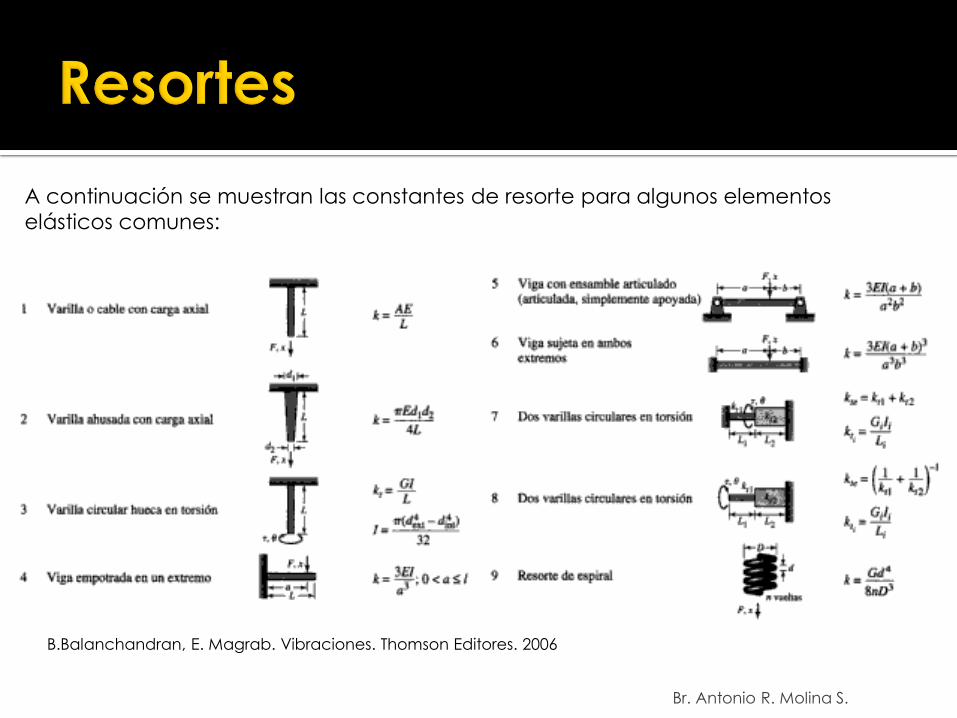
A continuación se muestran las constantes de resorte para algunos elementos
elásticos comunes:
B.Balanchandran, E. Magrab. Vibraciones. Thomson Editores. 2006

Br. Antonio R. Molina S.
Es el medio que acumula energía cinética en el
sistema. También se le denomina elemento de
inercia.
Las fuerzas de inercia vienen dadas de acuerdo
a la segunda Ley de Newton como:
La energía cinética del movimiento de traslación
viene dada como:
Por analogía para el movimiento de rotación se
tiene:Michelin Active Wheel.
Br. Antonio R. Molina S.
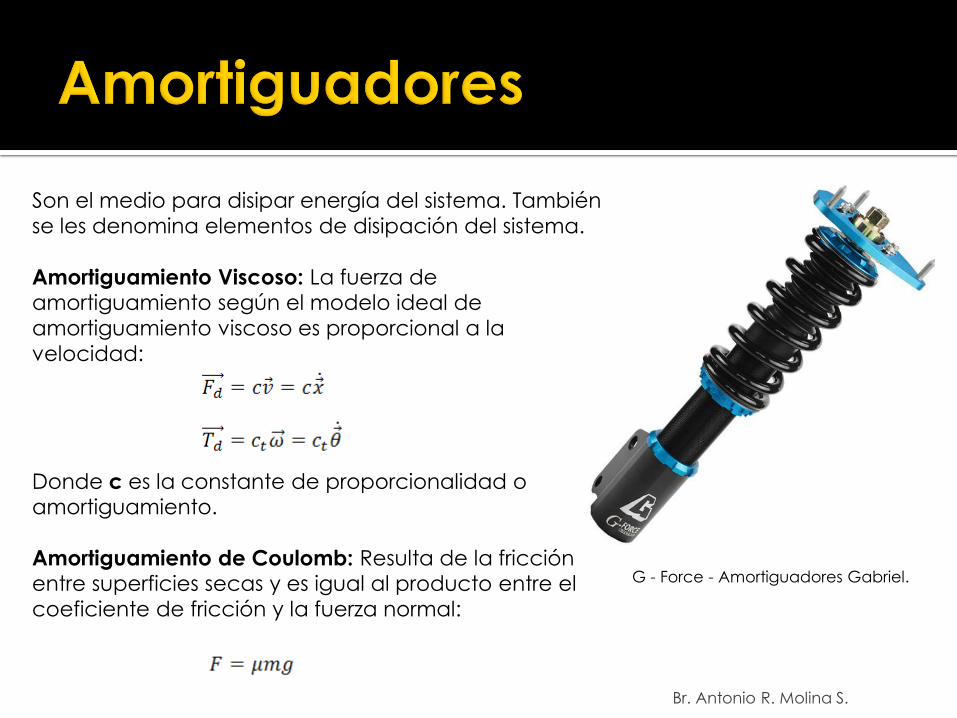
Son el medio para disipar energía del sistema. También
se les denomina elementos de disipación del sistema.
Amortiguamiento Viscoso: La fuerza de amortiguamiento según el modelo ideal de
amortiguamiento viscoso es proporcional a la
velocidad:
Donde c es la constante de proporcionalidad o amortiguamiento.
Amortiguamiento de Coulomb: Resulta de la fricción entre superficies secas y es igual al producto entre el
coeficiente de fricción y la fuerza normal:
G - Force - Amortiguadores Gabriel.
Movimiento Armónico, Movimiento Periódico, Frecuencias
Naturales, Resonancia
Br. Antonio R. Molina S.Guitarra Clásica – Prudencio Sáez.
Br. Antonio R. Molina S.
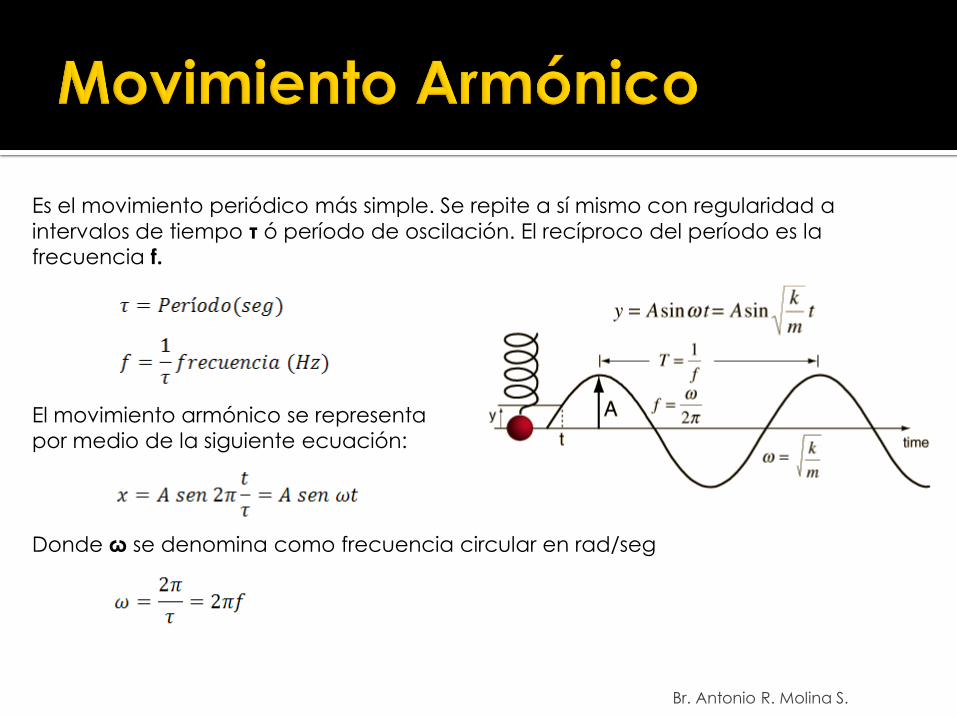
Es el movimiento periódico más simple. Se repite a sí mismo con regularidad a
intervalos de tiempo τ ó período de oscilación. El recíproco del período es la
frecuencia f.
El movimiento armónico se representa
por medio de la siguiente ecuación:
Donde ω se denomina como frecuencia circular en rad/seg
Br. Antonio R. Molina S.
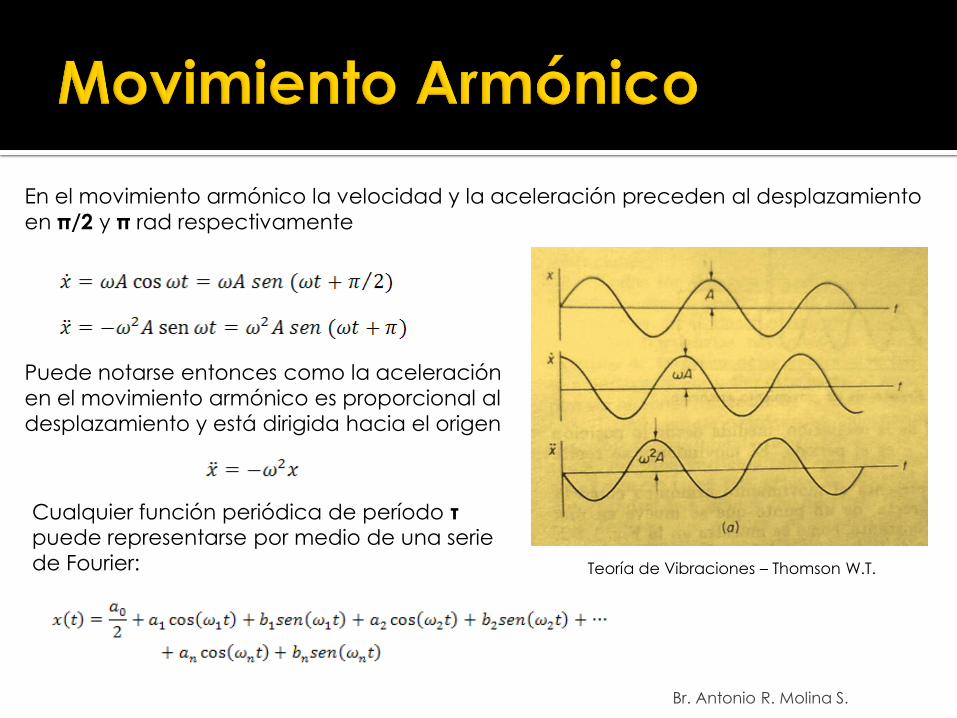
En el movimiento armónico la velocidad y la aceleración preceden al desplazamiento
en π/2 y π rad respectivamente
Puede notarse entonces como la aceleración
en el movimiento armónico es proporcional al
desplazamiento y está dirigida hacia el origen
Cualquier función periódica de período τpuede representarse por medio de una serie
de Fourier: Teoría de Vibraciones – Thomson W.T.
Br. Antonio R. Molina S.
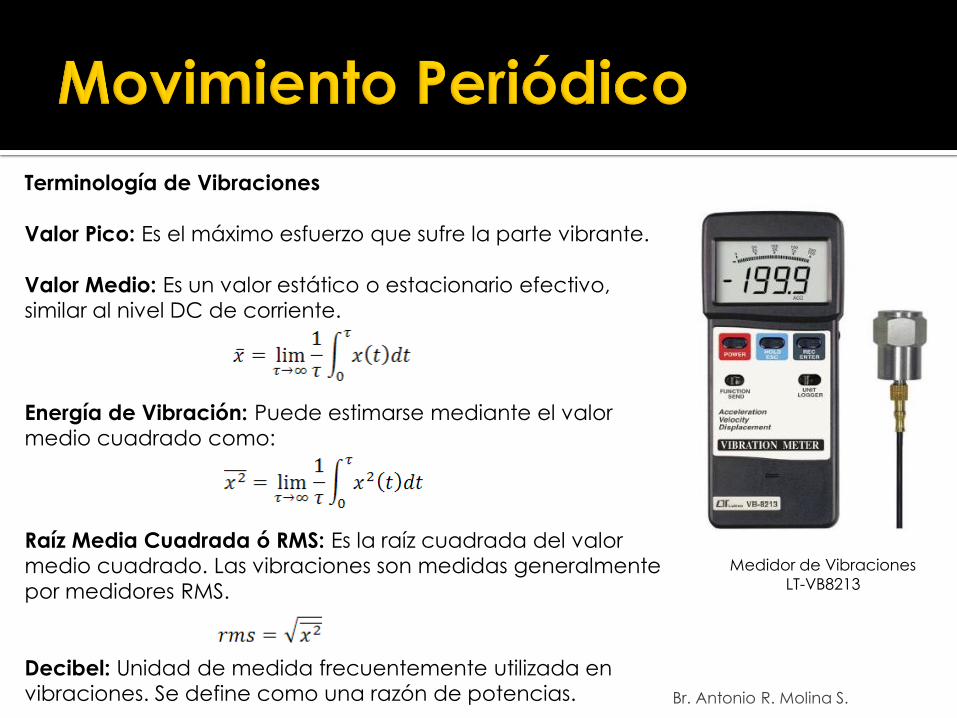
Terminología de Vibraciones
Valor Pico: Es el máximo esfuerzo que sufre la parte vibrante.
Valor Medio: Es un valor estático o estacionario efectivo, similar al nivel DC de corriente.
Energía de Vibración: Puede estimarse mediante el valor medio cuadrado como:
Raíz Media Cuadrada ó RMS: Es la raíz cuadrada del valor medio cuadrado. Las vibraciones son medidas generalmente
por medidores RMS.
Decibel: Unidad de medida frecuentemente utilizada en vibraciones. Se define como una razón de potencias.
Medidor de Vibraciones
LT-VB8213

Br. Antonio R. Molina S.
Puente Tacoma Narrows – Seattle 1940
Un sistema puede encontrarse bajo vibración
libre o forzada. La vibración libre ocurre
cuando el sistema vibra a una o más de sus
frecuencias naturales bajo la acción de fuerzas inherentes al sistema mismo.
La vibración que tiene lugar bajo excitación
de fuerzas externas es una vibración forzada.
Cuando la excitación es oscilatoria el sistema
es obligado a vibrar a la frecuencia de
excitación. Si ésta coincide con una de las
frecuencias naturales del sistema, se produce
una situación de resonancia y ocurren oscilaciones peligrosamente grandes.
Uno de los casos emblemáticos sobre
desastres de la ingeniería es el del colapso
del puente de Tacoma Narrows, en el año 1940, derribado por acción del viento.

Ecuación de Movimiento, Método de Energía, Método de
Rayleigh, Amortiguamiento Viscoso
Br. Antonio R. Molina S.Parque Eólico “Antonio Morán” – Comodoro Rivadavia, Argentina.
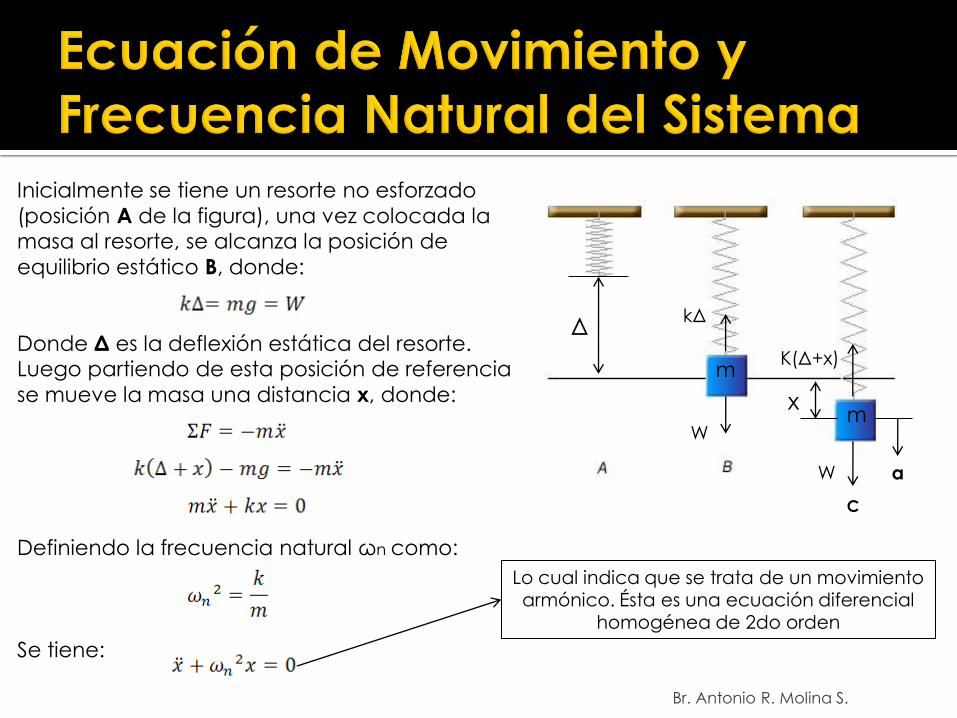
x
Δ
m
m
kΔ
W
K(Δ+x)
W a
C
Br. Antonio R. Molina S.
Inicialmente se tiene un resorte no esforzado
(posición A de la figura), una vez colocada la masa al resorte, se alcanza la posición de
equilibrio estático B, donde:
Donde Δ es la deflexión estática del resorte. Luego partiendo de esta posición de referencia
se mueve la masa una distancia x, donde:
Definiendo la frecuencia natural ωn como:
Se tiene:
Lo cual indica que se trata de un movimiento armónico. Ésta es una ecuación diferencial
homogénea de 2do orden

Br. Antonio R. Molina S.
La ecuación característica de la ecuación
diferencial obtenida es:
Y las raíces de esta ecuación característica
son:
La solución general de este tipo de
ecuación diferencial obedece a la forma:
Por lo que finalmente se obtiene:
Los coeficientes A y B se determinan
con las condiciones iniciales x(0) y v(0),
osea:
Luego recordando que:
Se tiene que:
Entonces la frecuencia natural del
sistema viene dada como:
Br. Antonio R. Molina S.
En un sistema vibratorio se da el intercambio
constante de energía entre sus formas
cinética y potencial. De acuerdo al principio
de conservación de la energía se tiene que
la suma de la energía cinética y la energía
potencial del sistema es constante y no varía
en el tiempo:
Sustituyendo las expresiones
correspondientes a cada tipo de energía :
Derivando se obtiene la misma expresión
que al aplicar la segunda ley de Newton:
Downhill – downhill.esforos.com
Br. Antonio R. Molina S.
El movimiento de varias masas puede
expresarse en términos del movimiento xde algún punto en específico del
sistema, el cual se reduce entonces a
uno con un solo grado de libertad.
La energía cinética resultante puede
escribirse como:
Siendo meff una masa equivalente
concentrada en el punto de estudio. Si
se conoce la rigidez de dicho punto, la
frecuencia natural viene dada como: De esta manera es posible tener en
cuenta masas previamente ignoradas y
llegar así a un mejor estimado de la
frecuencia fundamental.
Rally Dakar – Volkswagen.
Br. Antonio R. Molina S.
La respuesta de un sistema dependerá del
amortiguamiento que este presente.
Mediante el amortiguamiento se disipa la
energía del sistema.
La fuerza de amortiguamiento viscoso es
proporcional a la velocidad y si se toma en
cuenta, la ecuación de movimiento para
vibración libre queda como:
Esta ecuación diferencial homogénea
tiene tres posibles soluciones. Su ecuación
característica es:
Rally Dakar – Hummer GMC.
Cuyas raíces vienen dadas por:

Br. Antonio R. Molina S.
Una posible solución a la ecuación
diferencial obtenida es aquella para la cual
ambas raíces de la ecuación característica
son iguales, lo cual implica que:
A este amortiguamiento se le denomina
amortiguamiento crítico y viene dado
como:
De aquí que se exprese una razón de
amortiguamiento respecto al valor crítico:
Que para este caso tiene un valor ζ=1.0
Luego sustituyendo en las raíces se tiene:
Que para este caso da como resultado:
Finalmente se obtiene la solución de la
ecuación diferencial:
Los coeficientes A y B se determinan
mediante las condiciones iniciales x(0) y
v(0) quedando:

Br. Antonio R. Molina S.
El caso sub-amortiguado es también
denominado movimiento oscilatorio y tiene ζ<1.
Cuando el movimiento es oscilatorio las raíces
de la ecuación característica son imaginarias y
pueden escribirse como:
Lo cual nos da otra solución posible de la
ecuación diferencial en cualquiera de las
formas siguientes:
Donde ωd es la frecuencia de oscilación amortiguada y viene dada
como:
Teoría de Vibraciones – Thomson W.T.

Br. Antonio R. Molina S.
El caso sobre-amortiguado es también
denominado movimiento no oscilatorio y
tiene ζ>1. Para este caso ambas raíces de
la ecuación característica son reales
dando como resultado la siguiente
solución a la ecuación diferencial:
En donde:
Teoría de Vibraciones – Thomson W.T.
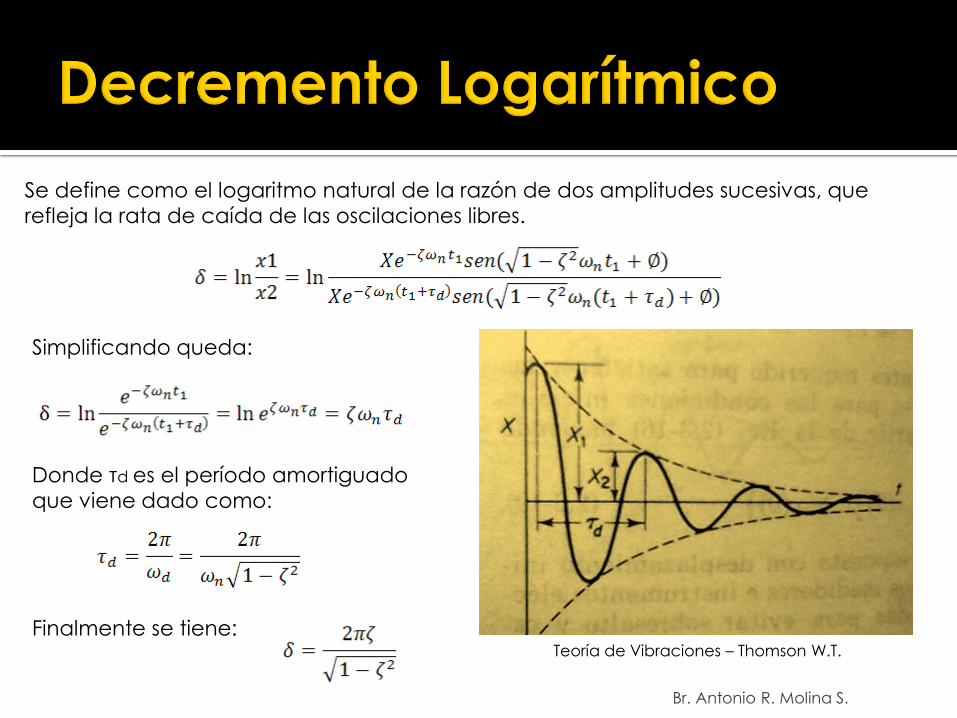
Simplificando queda:
Donde τd es el período amortiguado
que viene dado como:
Finalmente se tiene:
Br. Antonio R. Molina S.
Se define como el logaritmo natural de la razón de dos amplitudes sucesivas, que
refleja la rata de caída de las oscilaciones libres.
Teoría de Vibraciones – Thomson W.T.

Vibración Armónica Forzada, Ecuación de Movimiento
Br. Antonio R. Molina S.Turbina Hidráulica Kaplan - CKD BLANSKO HOLDING.
Br. Antonio R. Molina S.
•Un sistema sometido a excitación
armónica forzada responde con la misma
frecuencia de la excitación inducida.
•La excitación armónica es frecuente en
sistemas de ingeniería y es comúnmente
producida por desbalances en máquinas
rotatorias, fuerzas producidas por
máquinas reciprocantes, entre otros.
•Si la frecuencia de excitación coincide
con una de las frecuencias naturales del
sistema se produce resonancia. Este
fenómeno debe evitarse en la mayoría de
los casos.
•Para evitar que se desarrollen grandes
amplitudes se emplean amortiguadores.Turbina de Avión – CF6
Br. Antonio R. Molina S.
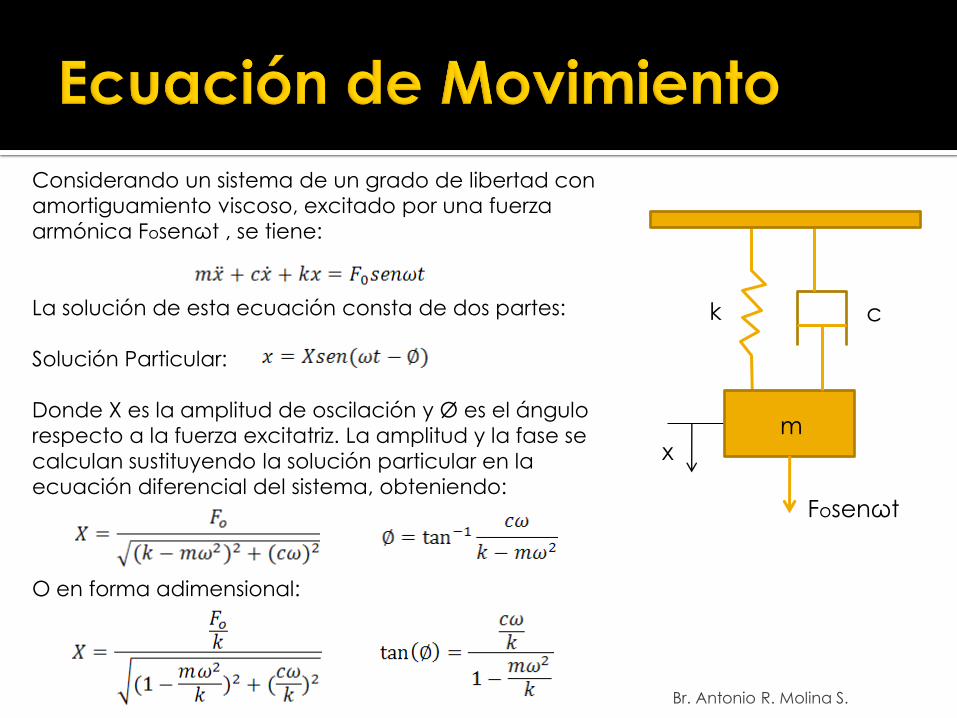
m
ck
Fosenωt
x
Considerando un sistema de un grado de libertad con
amortiguamiento viscoso, excitado por una fuerza
armónica Fosenωt , se tiene:
La solución de esta ecuación consta de dos partes:
Solución Particular:
Donde X es la amplitud de oscilación y Ø es el ángulo
respecto a la fuerza excitatriz. La amplitud y la fase se
calculan sustituyendo la solución particular en la
ecuación diferencial del sistema, obteniendo:
O en forma adimensional:

Recordando que:
Se tiene:
Puede observarse entonces que tanto la amplitud adimensional como el ángulo de
fase son funciones solamente de la razón de frecuencias ω/ωn y del factor de
amortiguación ζ.
Br. Antonio R. Molina S.
KTM –ATV-450SX – KTV Springs.
Br. Antonio R. Molina S.
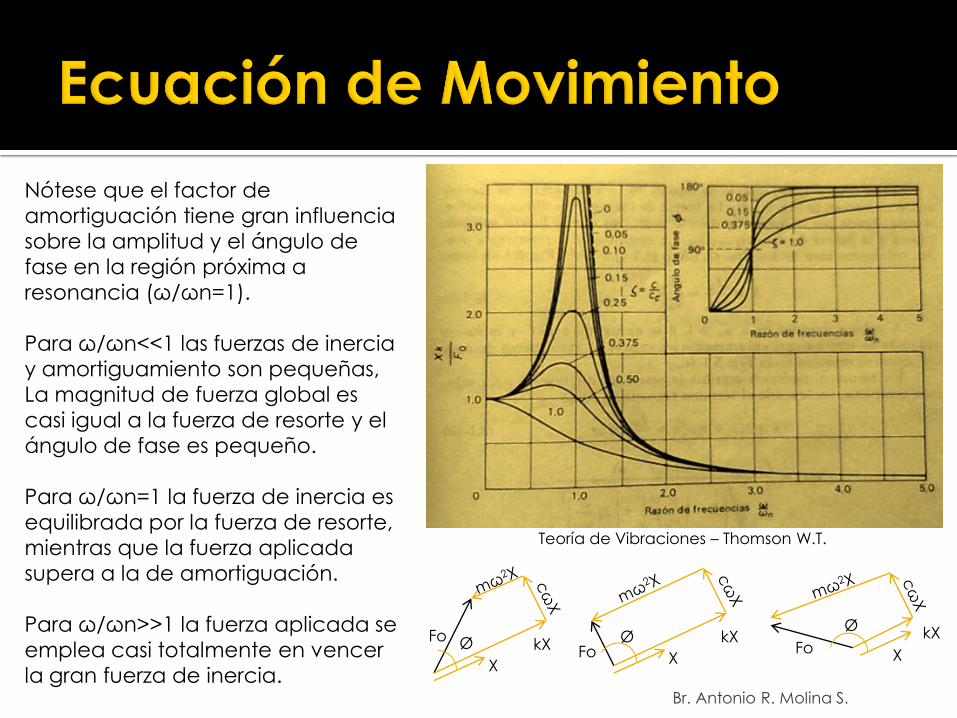
Teoría de Vibraciones – Thomson W.T.
Nótese que el factor de
amortiguación tiene gran influencia
sobre la amplitud y el ángulo de
fase en la región próxima a
resonancia (ω/ωn=1).
Para ω/ωn<<1 las fuerzas de inercia
y amortiguamiento son pequeñas,
La magnitud de fuerza global es
casi igual a la fuerza de resorte y el
ángulo de fase es pequeño.
Para ω/ωn=1 la fuerza de inercia es
equilibrada por la fuerza de resorte,
mientras que la fuerza aplicada
supera a la de amortiguación.
Para ω/ωn>>1 la fuerza aplicada se
emplea casi totalmente en vencer
la gran fuerza de inercia.X
kXFo Ø
X
kXFo
ØX
Ø kXFo
Br. Antonio R. Molina S.
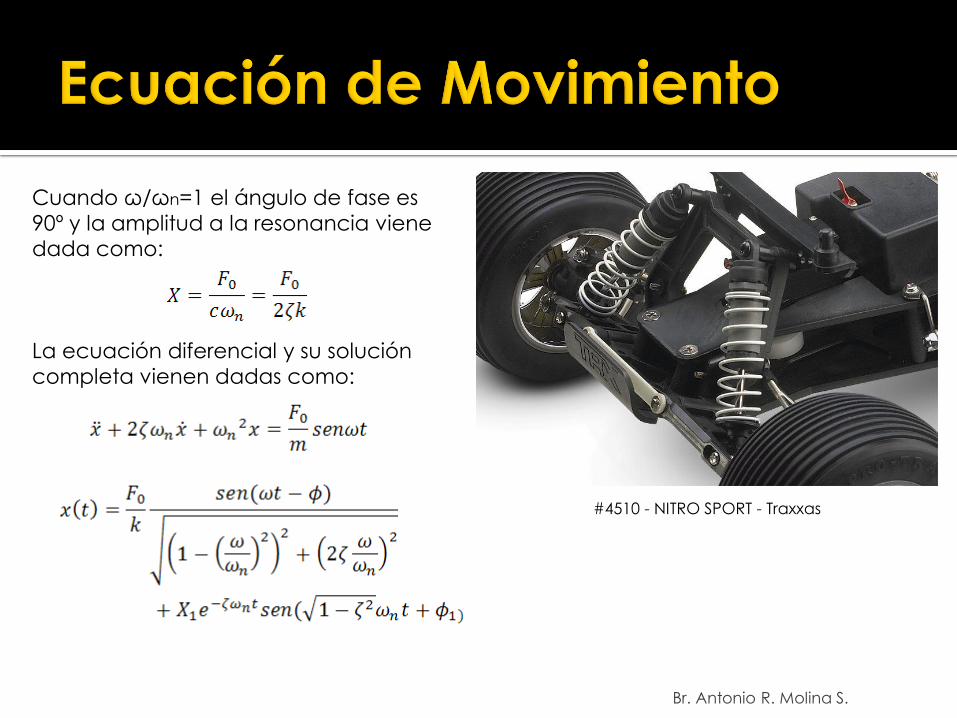
#4510 - NITRO SPORT - Traxxas
Cuando ω/ωn=1 el ángulo de fase es
90º y la amplitud a la resonancia viene
dada como:
La ecuación diferencial y su solución
completa vienen dadas como:

Desbalance Rotatorio, Balanceo Estático, Balanceo Dinámico,
Cabeceo de Ejes Rotatorios.
Br. Antonio R. Molina S.
Formula 1 2009 – Codemasters

Br. Antonio R. Molina S.
El desbalance en máquinas rotatorias es una fuente
común de excitación vibratoria. Si se considera un
sistema masa-resorte-amortiguador, de un solo grado
de libertad, excitado por una máquina rotatoria no
balanceada, el desbalance es representado por una
masa excéntrica m con excentricidad e que rota a
velocidad angular ω.
El desplazamiento de m es:
Y la ecuación de movimiento viene dada como:
Que también puede escribirse como:
Expresión idéntica a la ecuación de movimiento para
vibración excitada armónicamente, por lo tanto:
m
ck
ωt
x
M
e

Br. Antonio R. Molina S.
Rally Subaru – Collin Mc Rae Rally.
La solución estacionaria de la ecuación
viene dada como:
O de forma adimensional como:
La solución completa está dada por:
Br. Antonio R. Molina S.
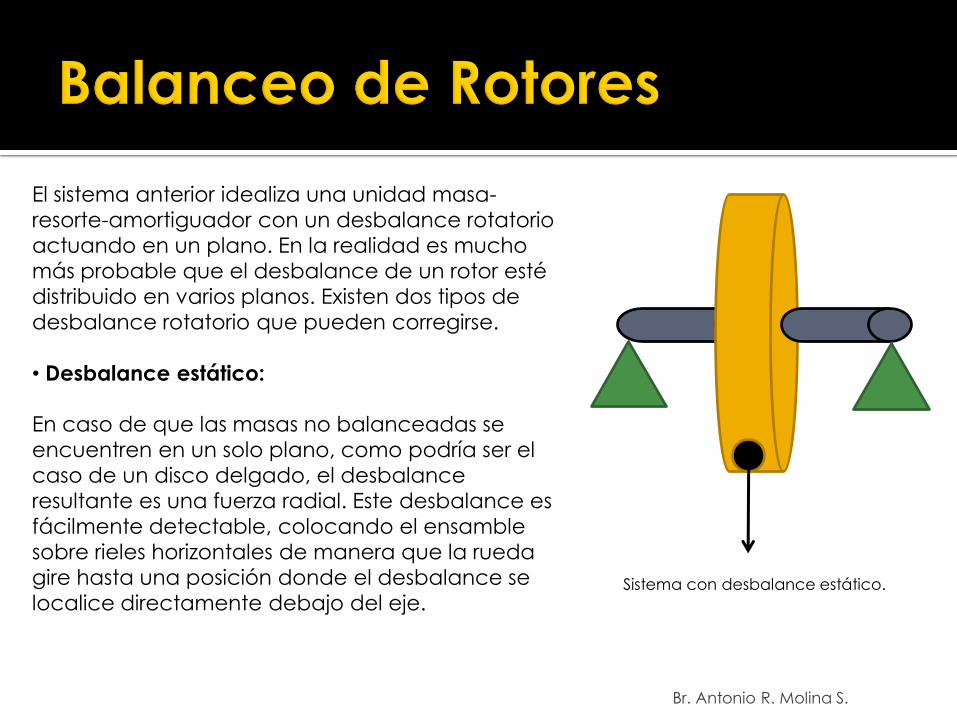
El sistema anterior idealiza una unidad masa-
resorte-amortiguador con un desbalance rotatorio
actuando en un plano. En la realidad es mucho
más probable que el desbalance de un rotor esté
distribuido en varios planos. Existen dos tipos de
desbalance rotatorio que pueden corregirse.
• Desbalance estático:
En caso de que las masas no balanceadas se
encuentren en un solo plano, como podría ser el
caso de un disco delgado, el desbalance
resultante es una fuerza radial. Este desbalance es
fácilmente detectable, colocando el ensamble
sobre rieles horizontales de manera que la rueda
gire hasta una posición donde el desbalance se
localice directamente debajo del eje.Sistema con desbalance estático.

Br. Antonio R. Molina S.
Máquina balanceadora de llantas - BFH1000
• Desbalance dinámico:
En caso de que el desbalance aparezca en más
de un plano, la resultante será una fuerza y un
momento de balanceo. El momento de balanceo
sólo puede ser detectado haciendo girar el rotor.
En este tipo de desbalance se establecerán fuerzas
centrífugas rotatorias que tenderán a mecer la
flecha en sus cojinetes.
El cigüeñal de un motor puede considerarse como
una serie de discos delgados con algún
desbalance, los cuales deben ser ensayados
rotando para poder detectar dicho desbalance.
La máquina de balanceo consiste en cojinetes
montados sobre resortes que permiten detectar las
fuerzas no balanceadas. Si se conoce la amplitud y
fase relativa de cada cojinete, es posible
determinar y corregir el desbalance.
Br. Antonio R. Molina S.
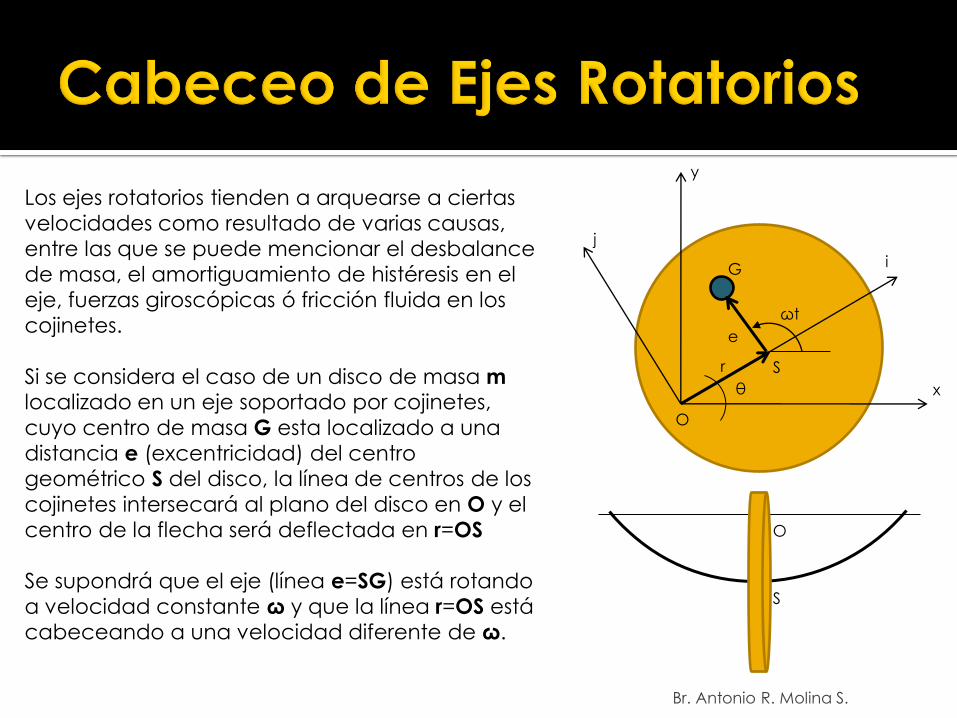
G
e
r
y
x
i
j
θ
S
O
ωt
Los ejes rotatorios tienden a arquearse a ciertas
velocidades como resultado de varias causas,
entre las que se puede mencionar el desbalance
de masa, el amortiguamiento de histéresis en el
eje, fuerzas giroscópicas ó fricción fluida en los
cojinetes.
Si se considera el caso de un disco de masa m localizado en un eje soportado por cojinetes,
cuyo centro de masa G esta localizado a una
distancia e (excentricidad) del centro
geométrico S del disco, la línea de centros de los
cojinetes intersecará al plano del disco en O y el
centro de la flecha será deflectada en r=OS
Se supondrá que el eje (línea e=SG) está rotando
a velocidad constante ω y que la línea r=OS está
cabeceando a una velocidad diferente de ω.
O
S
Br. Antonio R. Molina S.
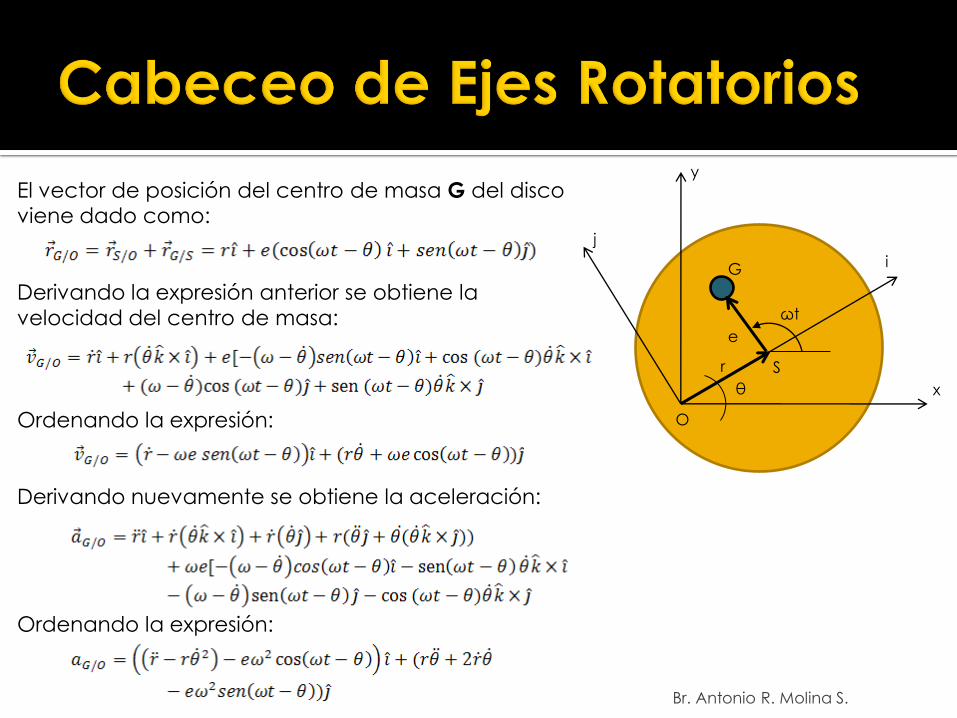
El vector de posición del centro de masa G del disco viene dado como:
Derivando la expresión anterior se obtiene la
velocidad del centro de masa:
Ordenando la expresión:
Derivando nuevamente se obtiene la aceleración:
Ordenando la expresión:
G
e
r
y
x
i
j
θ
S
O
ωt
Br. Antonio R. Molina S.
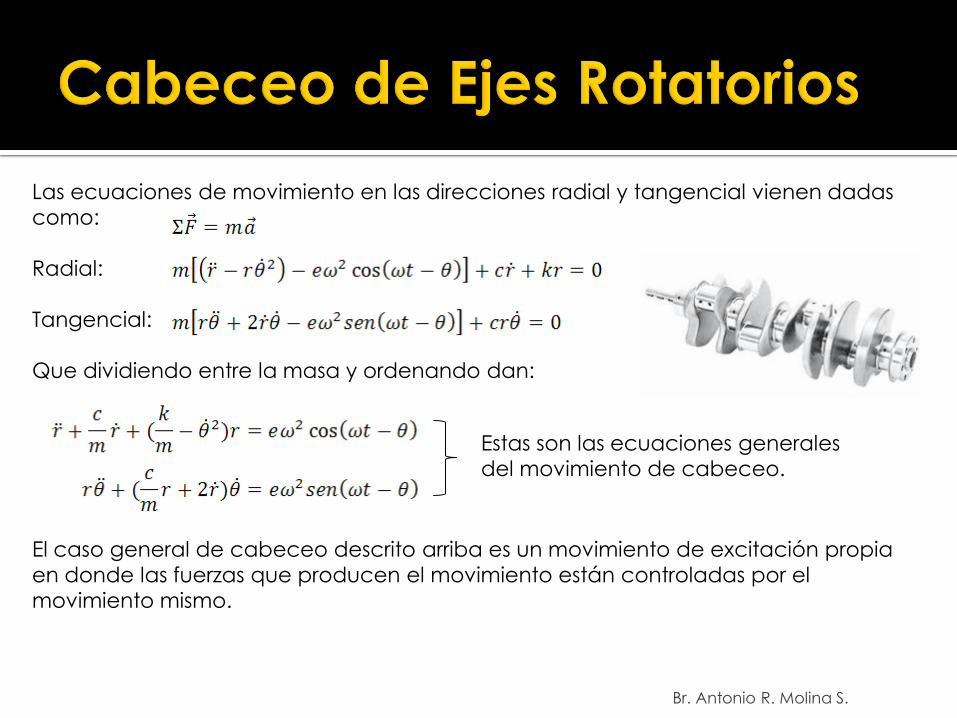
Las ecuaciones de movimiento en las direcciones radial y tangencial vienen dadas
como:
Radial:
Tangencial:
Que dividiendo entre la masa y ordenando dan:
El caso general de cabeceo descrito arriba es un movimiento de excitación propia
en donde las fuerzas que producen el movimiento están controladas por el
movimiento mismo.
Estas son las ecuaciones generales
del movimiento de cabeceo.
Br. Antonio R. Molina S.
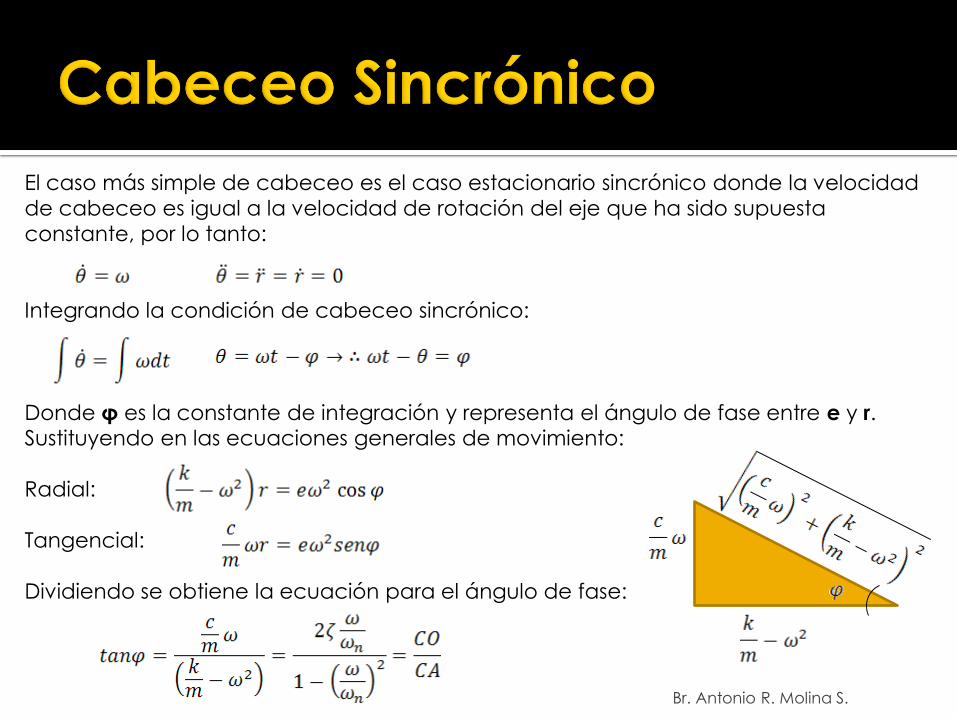
El caso más simple de cabeceo es el caso estacionario sincrónico donde la velocidad
de cabeceo es igual a la velocidad de rotación del eje que ha sido supuesta
constante, por lo tanto:
Integrando la condición de cabeceo sincrónico:
Donde φ es la constante de integración y representa el ángulo de fase entre e y r. Sustituyendo en las ecuaciones generales de movimiento:
Radial:
Tangencial:
Dividiendo se obtiene la ecuación para el ángulo de fase:

A partir del triángulo vectorial mostrado se
tiene:
Sustituyendo en la ecuación de movimiento
radial y despejando r, se obtiene la ecuación
de amplitud:
Rotor Wankel – www.RX7club.com
(Estas ecuaciones indican que la línea de excentricidad e, precede a la línea de desplazamiento r en el ángulo de fase φ, que depende del amortiguamiento y la razón de velocidades. Cuando la velocidad de rotación alcanza la frecuencia natural del eje, se llega a una condición de resonancia en que la amplitud sólo es restringida por el amortiguamiento).
Movimiento del Soporte, Aislamiento Vibratorio, Energía Disipada
por Amortiguamiento, Instrumentos Medidores de Vibraciones.
Br. Antonio R. Molina S.Imagen del terremoto de Chile tomada del New York Times (2010).

Br. Antonio R. Molina S.
m
ck
x
y = Y sen ωt
En muchos casos el sistema dinámico es excitado por
el movimiento del punto de soporte. Considérese el
sistema de la figura, su ecuación diferencial viene
dada como:
Haciendo: z = x – y, se tiene:
Si el movimiento de la base se supone armónico:
Cuya solución viene dada como:
De esta forma, las curvas de amplitud vs razón de
frecuencias son aplicables con el apropiado cambio
de ordenada.

Br. Antonio R. Molina S.
Las fuerzas vibratorias generadas por máquinas son a
menudo inevitables; sin embargo, su efecto puede
reducirse sustancialmente agregando resortes
denominados aisladores. La fuerza transmitida a través
del resorte y el amortiguador viene dada como:
La fuerza excitatriz armónica viene dada a partir de la
ecuación general de amplitud como:
La transmisibilidad de fuerza viene dada según la
siguiente relación:
X
ØkX
Fo
Ft
m
ck
x

Br. Antonio R. Molina S.
Planta eléctrica con aislamiento vibratorio en la
base - Energiestro
•Puede concluirse entonces que un resorte
no amortiguado es superior a un resorte
amortiguado para efectos de reducir la
transmisibilidad.
•Es deseable sin embargo algún
amortiguamiento cuando es necesario que
ω pase por la región de resonancia.
•El aislamiento vibratorio sólo es posible
cuando la relación de velocidades ω/ωn es
superior a √2
•Es posible reducir la amplitud de vibración
apoyando la máquina sobre una gran masa.
Br. Antonio R. Molina S.
El amortiguamiento está presente en todo
sistema oscilatorio y disipa la energía del
mismo en forma de calor o radiación.
La pérdida de energía se traduce en
decrementos de la amplitud de la vibración
libre, pero en el caso de vibración forzada, la
pérdida de energía es compensada por la
energía suministrada por la excitación.
La disipación de energía es determinada
usualmente bajo condiciones de oscilaciones
cíclicas y la relación fuerza-desplazamiento
encierra un área denominada bucla de
histéresis.
La energía perdida por ciclo, debido a la
fuerza de amortiguación Fd, viene dada por:
Disco de Freno al Rojo Vivo - Porsche
Haciendo el siguiente cambio:
Se Obtiene:

Br. Antonio R. Molina S.
Fd
x
X
Fd+kx
x
X
La energía disipada por ciclo de las ecuaciones
anteriores será:
Sustituyendo:
La energía disipada a resonancia viene dada como:
Para la representación gráfica Fuerza vs Desplazamientose debe hallar la ecuación de la elipse como sigue:
Ecuación de la elipse:
Si añadimos la fuerza de resorte kx, la bucla de histéresis es rotada y se conforma el llamado modelo de Voigh.

Br. Antonio R. Molina S.
Sismómetro de banda ancha
Modelo: BBVS-60, BBVS-120
3 componentes adentro
Regeneración electrónica
Banda ancha: 50Hz120s
Rango dinámico: DB 140
Supervisión total alejada
Centro alejado de la masa
Consumición de la energía baja
De poco ruidocy
m
k
x
Muchos medidores de vibración tienen como
unidad básica el sistema mostrado en el
esquema de abajo. Dependiendo del rango
de frecuencia utilizado, el instrumento indicará
la velocidad, aceleración o desplazamiento
relativo de la masa suspendida con respecto a
la caja. La ecuación de movimiento es:
La solución estacionaria es entonces:
Br. Antonio R. Molina S.
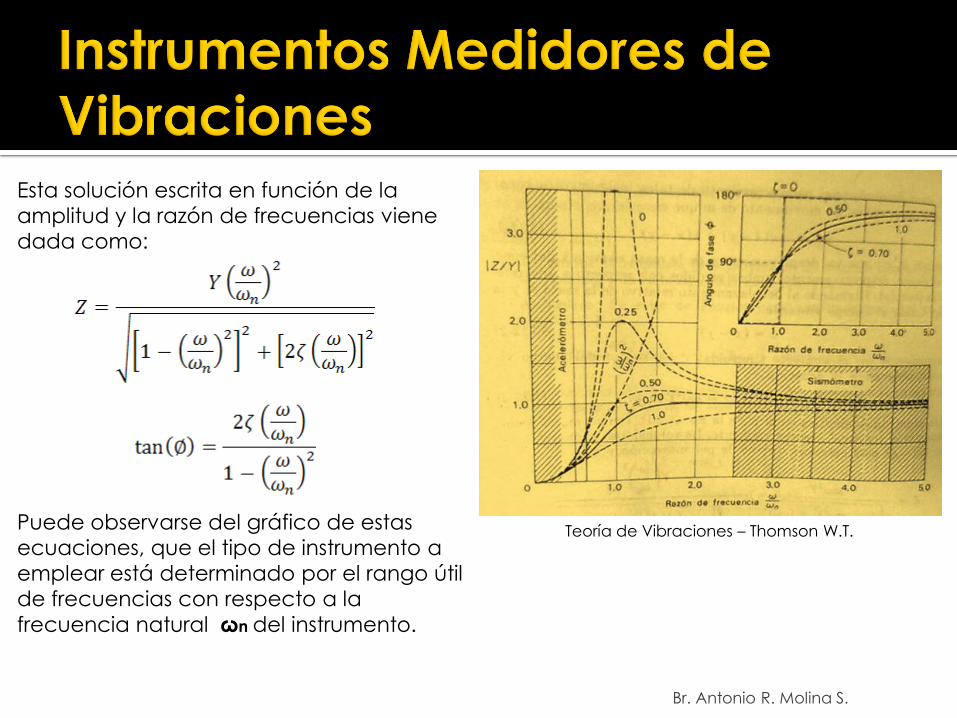
Esta solución escrita en función de la
amplitud y la razón de frecuencias viene
dada como:
Puede observarse del gráfico de estas
ecuaciones, que el tipo de instrumento a
emplear está determinado por el rango útil
de frecuencias con respecto a la
frecuencia natural ωn del instrumento.
Teoría de Vibraciones – Thomson W.T.
Br. Antonio R. Molina S.
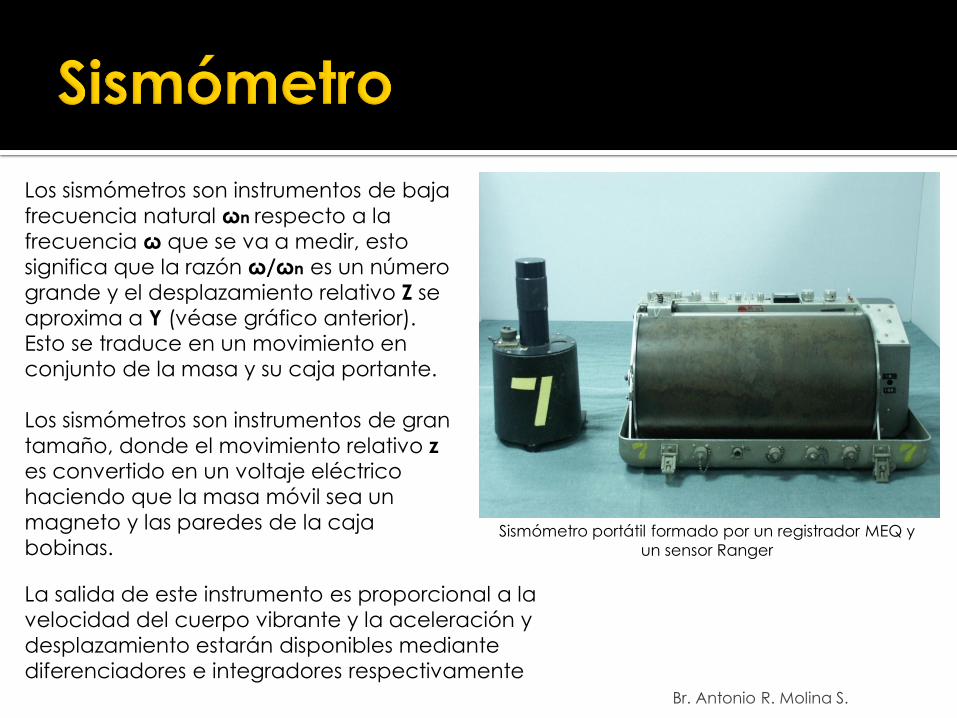
Sismómetro portátil formado por un registrador MEQ y
un sensor Ranger
Los sismómetros son instrumentos de baja
frecuencia natural ωn respecto a la
frecuencia ω que se va a medir, esto
significa que la razón ω/ωn es un número
grande y el desplazamiento relativo Z se
aproxima a Y (véase gráfico anterior). Esto se traduce en un movimiento en
conjunto de la masa y su caja portante.
Los sismómetros son instrumentos de gran
tamaño, donde el movimiento relativo zes convertido en un voltaje eléctrico
haciendo que la masa móvil sea un
magneto y las paredes de la caja
bobinas.
La salida de este instrumento es proporcional a la
velocidad del cuerpo vibrante y la aceleración y
desplazamiento estarán disponibles mediante
diferenciadores e integradores respectivamente
Br. Antonio R. Molina S.
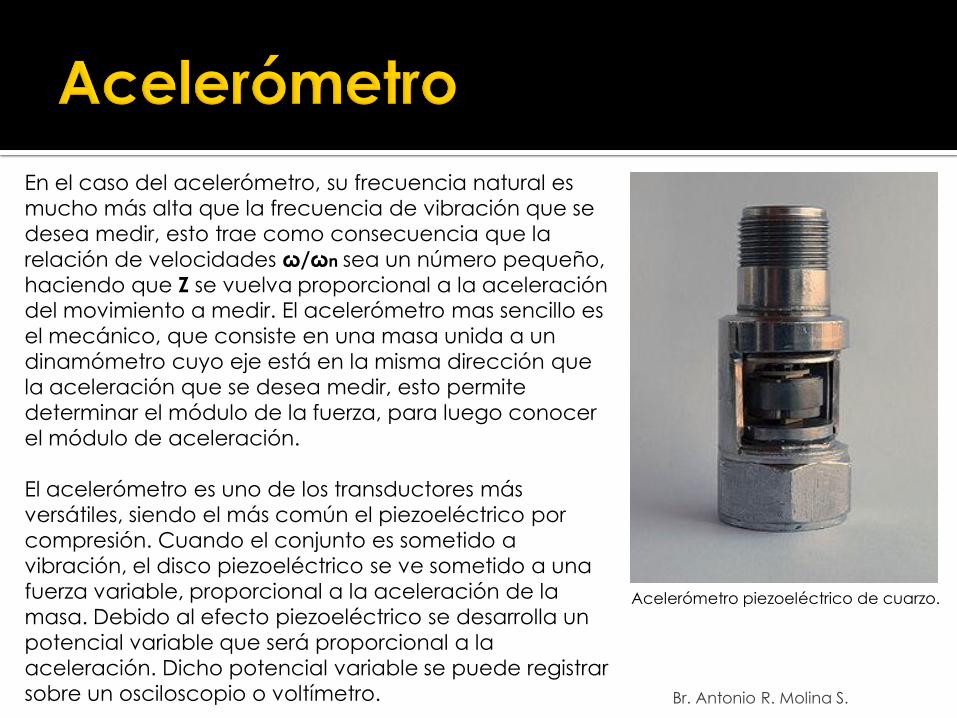
Acelerómetro piezoeléctrico de cuarzo.
En el caso del acelerómetro, su frecuencia natural es
mucho más alta que la frecuencia de vibración que se
desea medir, esto trae como consecuencia que la
relación de velocidades ω/ωn sea un número pequeño,
haciendo que Z se vuelva proporcional a la aceleración del movimiento a medir. El acelerómetro mas sencillo es
el mecánico, que consiste en una masa unida a un
dinamómetro cuyo eje está en la misma dirección que
la aceleración que se desea medir, esto permite
determinar el módulo de la fuerza, para luego conocer
el módulo de aceleración.
El acelerómetro es uno de los transductores más
versátiles, siendo el más común el piezoeléctrico por
compresión. Cuando el conjunto es sometido a
vibración, el disco piezoeléctrico se ve sometido a una
fuerza variable, proporcional a la aceleración de la
masa. Debido al efecto piezoeléctrico se desarrolla un
potencial variable que será proporcional a la
aceleración. Dicho potencial variable se puede registrar
sobre un osciloscopio o voltímetro.
Matriz de Rigidez, Valores Propios y Vectores Propios, Vibración Libre, Formas
Modales, Propiedades Ortogonales, Matriz Modal, Amortiguamiento Modal.
Br. Antonio R. Molina S.Suspensión Wrangler - Jeep
Br. Antonio R. Molina S.
El análisis de vibración de sistemas con muchos grados
de libertad requiere de métodos matriciales que
permitan una formulación sistemática y simple del
problema considerado.
La matriz de flexibilidad de un sistema se forma
considerando por separado los desplazamientos
debidos a fuerzas unitarias aplicadas y viene dada
como:
La matriz de rigidez de un sistema vibratorio es el inverso
de la matriz de flexibilidad y viene dada como:
La regla general para establecer los elementos de
rigidez de cualquier columna, es hacer el
desplazamiento correspondiente a esa columna igual
a la unidad, con los demás desplazamientos iguales a
cero y medir las fuerzas requeridas en cada estación.
Torre de las Telecomunicaciones
Montevideo Uruguay

Br. Antonio R. Molina S.
La vibración libre de un sistema no amortiguado
con varios grados de libertad viene expresado
matricialmente como:
Donde:
Pre multiplicando por la inversa de la matriz de
masa se tiene:
Donde I es una matriz unitaria y A la matriz del sistema.
Matriz de masa
Matriz de rigidez
Vector desplazamiento
Cuando el movimiento es armónico:
Por lo tanto:
La ecuación característica del sistema
es el determinante igualado a cero
como sigue:
Arte conceptual - Audi
Br. Antonio R. Molina S.
Puente de Alamillo Sevilla – Santiago Calatrava
Las raíces de la ecuación característica
son los denominados valores propios y las
frecuencias naturales del sistema se
determinan como:
Para hallar los vectores propios se hace
uso de la matriz adjunta y el inverso de la
matriz :
Pre multiplicando por IBI B:
Haciendo el cambio de variable:
Y sustituyendo en la expresión original, se
obtiene:
Para cada λ=λi:
Por lo tanto:
Cada vector Xi es un vector propio

Br. Antonio R. Molina S.
Casa Malinalco - México
Los modos normales o vectores propios
del sistema, son ortogonales con respecto
a las matrices de masa y de rigidez.
Dada la matriz del modo i-ésimo:
Pre multiplicando por la traspuesta de
otro modo, digamos j:
Haciendo lo contrario se tiene:
Como K y M son matrices simétricas, se cumple:
Restando 2 de 1 se obtiene:
Que en el caso de que λi≠λj,
necesariamente:
1
2
Finalmente si i=j:
Que son la masa y rigidez generalizadas
del sistema.
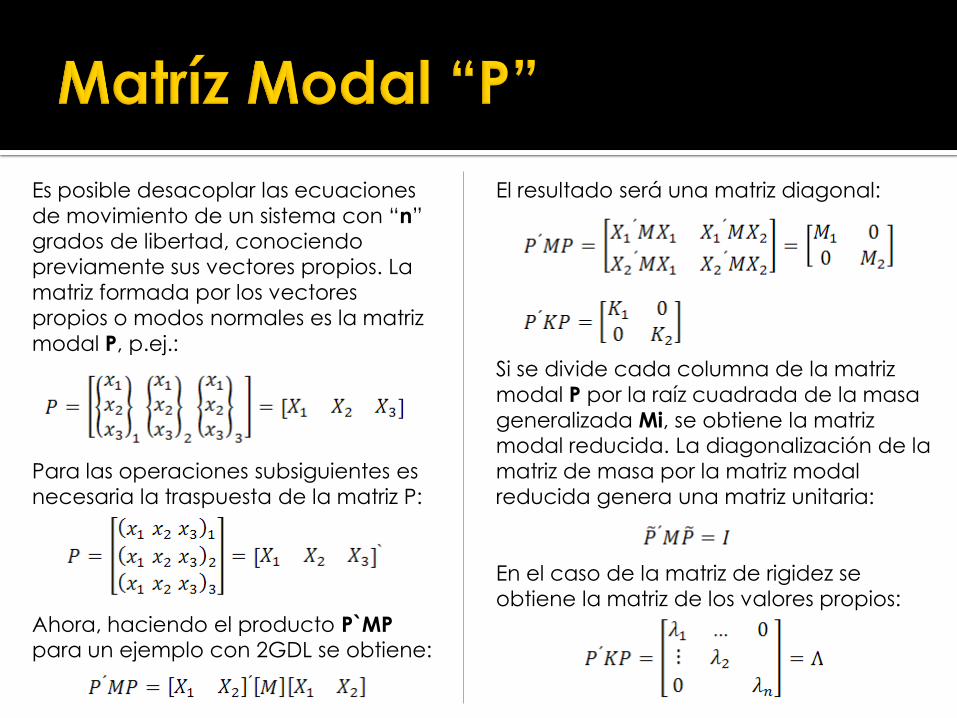
Es posible desacoplar las ecuaciones
de movimiento de un sistema con “n” grados de libertad, conociendo
previamente sus vectores propios. La
matriz formada por los vectores
propios o modos normales es la matriz
modal P, p.ej.:
Para las operaciones subsiguientes es
necesaria la traspuesta de la matriz P:
Ahora, haciendo el producto P`MPpara un ejemplo con 2GDL se obtiene:
El resultado será una matriz diagonal:
Si se divide cada columna de la matriz
modal P por la raíz cuadrada de la masa
generalizada Mi, se obtiene la matriz modal reducida. La diagonalización de la
matriz de masa por la matriz modal
reducida genera una matriz unitaria:
En el caso de la matriz de rigidez se
obtiene la matriz de los valores propios:
Br. Antonio R. Molina S.
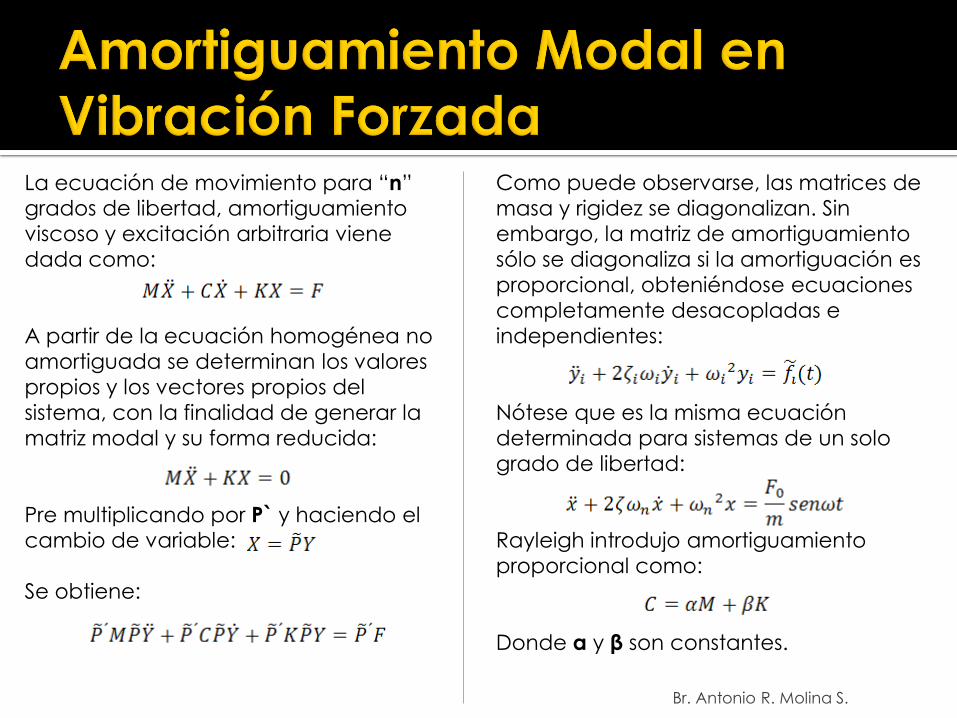
La ecuación de movimiento para “n” grados de libertad, amortiguamiento
viscoso y excitación arbitraria viene
dada como:
A partir de la ecuación homogénea no
amortiguada se determinan los valores
propios y los vectores propios del
sistema, con la finalidad de generar la
matriz modal y su forma reducida:
Pre multiplicando por P` y haciendo el cambio de variable:
Se obtiene:
Como puede observarse, las matrices de
masa y rigidez se diagonalizan. Sin
embargo, la matriz de amortiguamiento
sólo se diagonaliza si la amortiguación es
proporcional, obteniéndose ecuaciones
completamente desacopladas e
independientes:
Nótese que es la misma ecuación
determinada para sistemas de un solo
grado de libertad:
Rayleigh introdujo amortiguamiento
proporcional como:
Donde α y β son constantes.

Br. Antonio R. Molina S.
La aplicación de la matriz modal reducida
da como resultado:
De manera que para la i-ésima ecuación:
El amortiguamiento modal puede definirse
por la ecuación:
Boceto de un Sistema de Suspensión

Amortiguador de Péndulo Centrífugo, Disipador de Houdaille
Br. Antonio R. Molina S.Disipador Houdaille - Aston Martin V8
Br. Antonio R. Molina S.
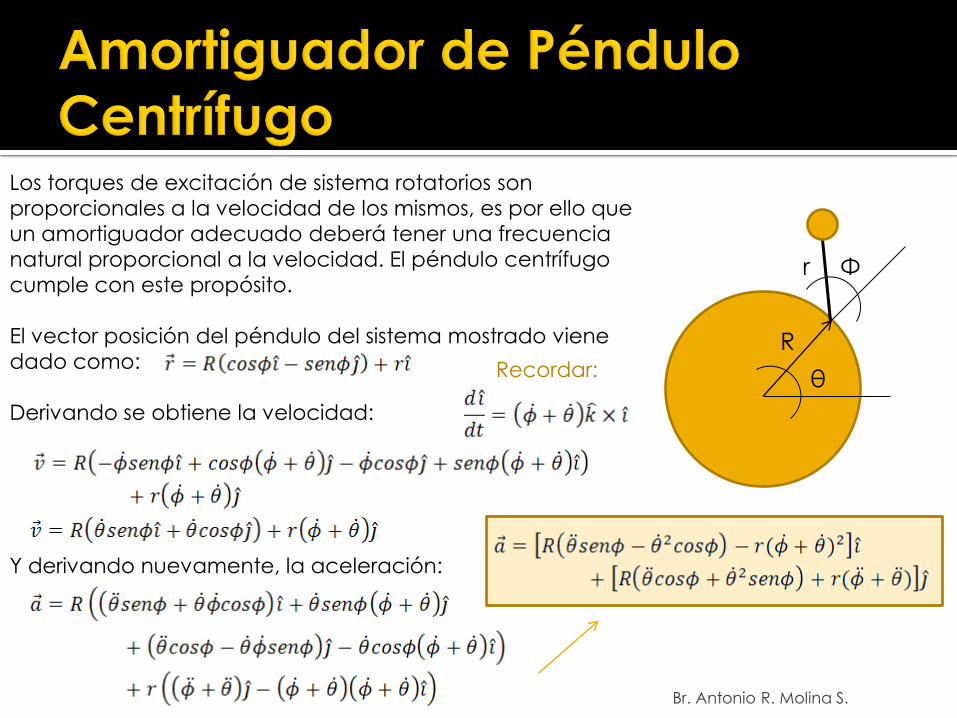
θ
Φ
R
r
Los torques de excitación de sistema rotatorios son
proporcionales a la velocidad de los mismos, es por ello que
un amortiguador adecuado deberá tener una frecuencia
natural proporcional a la velocidad. El péndulo centrífugo
cumple con este propósito.
El vector posición del péndulo del sistema mostrado viene
dado como:
Derivando se obtiene la velocidad:
Y derivando nuevamente, la aceleración:
Recordar:
Br. Antonio R. Molina S.
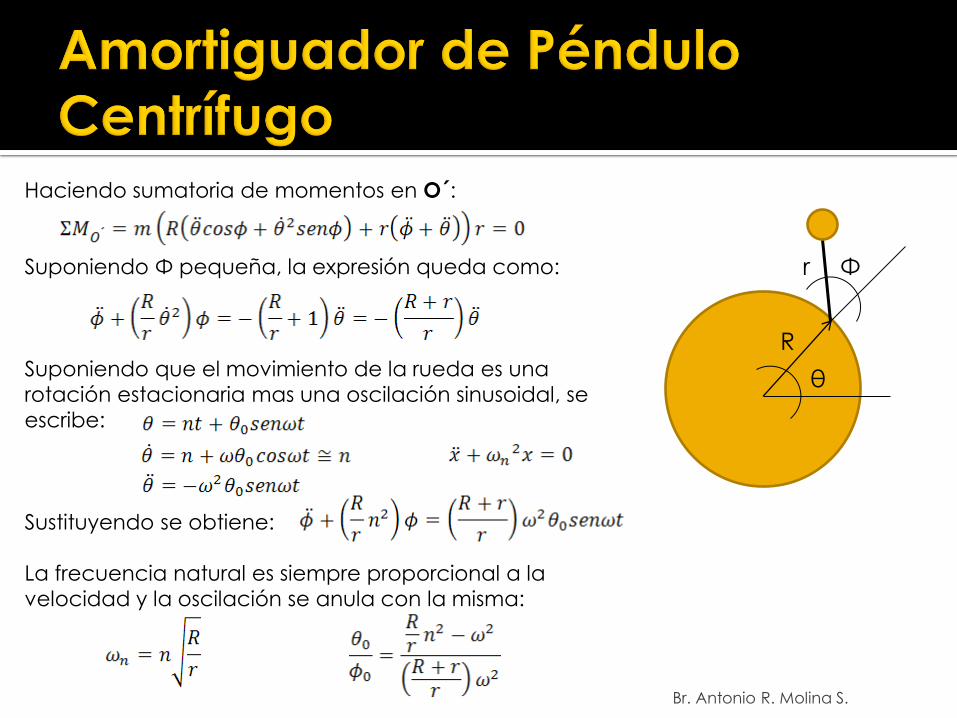
θ
Φ
R
r
Haciendo sumatoria de momentos en O´:
Suponiendo Φ pequeña, la expresión queda como:
Suponiendo que el movimiento de la rueda es una
rotación estacionaria mas una oscilación sinusoidal, se
escribe:
Sustituyendo se obtiene:
La frecuencia natural es siempre proporcional a la
velocidad y la oscilación se anula con la misma:

Br. Antonio R. Molina S.
En caso de que haya más de una frecuencia
perturbadora, el disipador torsional viscoso no
ajustado o disipador de Houdaille es efectivo en
un amplio rango de operación. Básicamente
consiste en una masa alojada en una cámara
cilíndrica llena de fluido viscoso.
Las ecuaciones de movimiento son:
Con movimiento armónico:
Sustituyendo:
k
J
Jd

Reordenando:
Luego despejando φ0 y sustituyendo en la primera de las ecuaciones:
Reordenando:
La amplitud viene dada como:
Y al realizar las sustituciones:
Se obtiene:
Cuya amortiguamiento óptimo viene
dado como:
A la frecuencia:

Br. Antonio R. Molina S.