tema 2: movimiento relativolaplace.us.es/wiki/images/1/12/mr_tema02_1819.pdf · movimiento...
TRANSCRIPT
Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Tema 2: Movimiento relativo
Mecánica Racional, 2º Grado en Ingeniería Civil
Departamento de Física Aplicada III
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
2Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
ÍndiceÍndice
IntroducciónDerivación en triedros móvilesNotación y defnicionesComposición de velocidades
TraslacionesRotaciones
Composición de aceleracionesTraslacionesRotaciones
Pares cinemáticos. Sólidos en contacto puntualDinámica en sistemas de referencia no inerciales
3Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
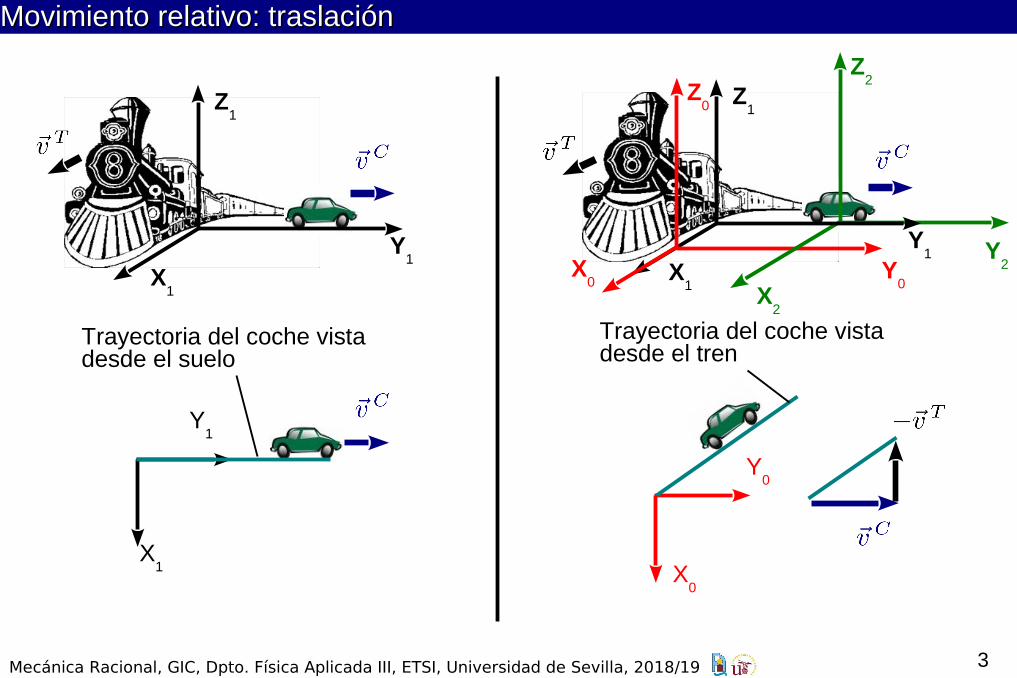
Movimiento relativo: traslaciónMovimiento relativo: traslación
X1
Y1
Z1
X1
Y1
Z1
Y0
Z0
X0
Trayectoria del coche vista desde el suelo
X1
Y1
Trayectoria del coche vista desde el tren
X0
Y0
Y2
Z2
X2
4Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
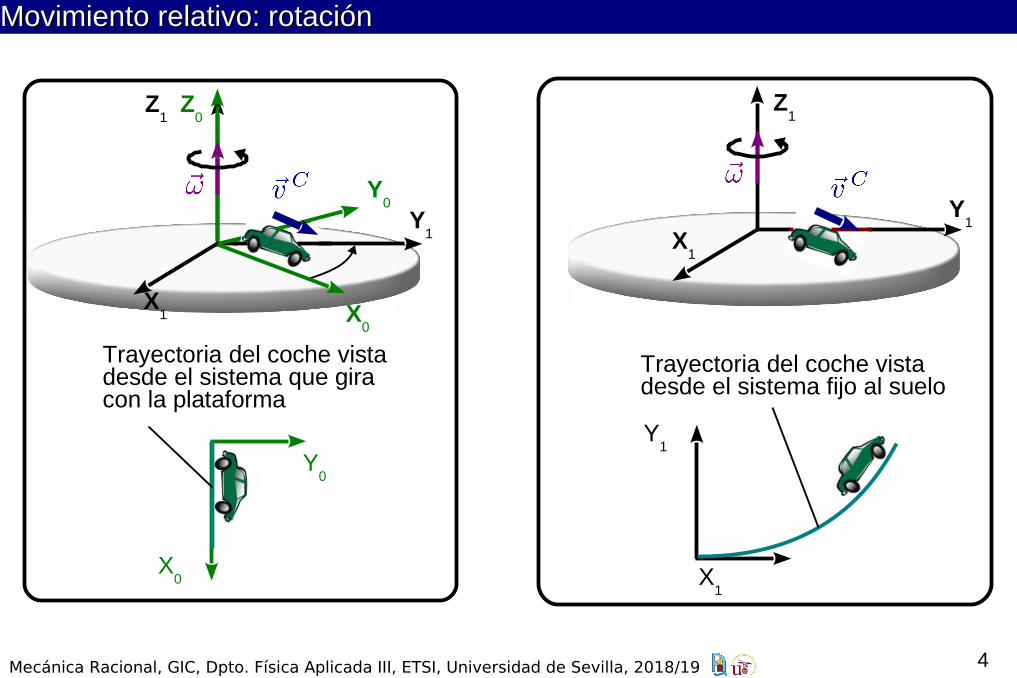
Movimiento relativo: rotaciónMovimiento relativo: rotación
X1
Y1
Z1
Z0
X1
Y1
Z1
X0
Y0
Trayectoria del coche vista desde el sistema que gira con la plataforma
X0
Y0
Trayectoria del coche vista desde el sistema fijo al suelo
X1
Y1
5Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
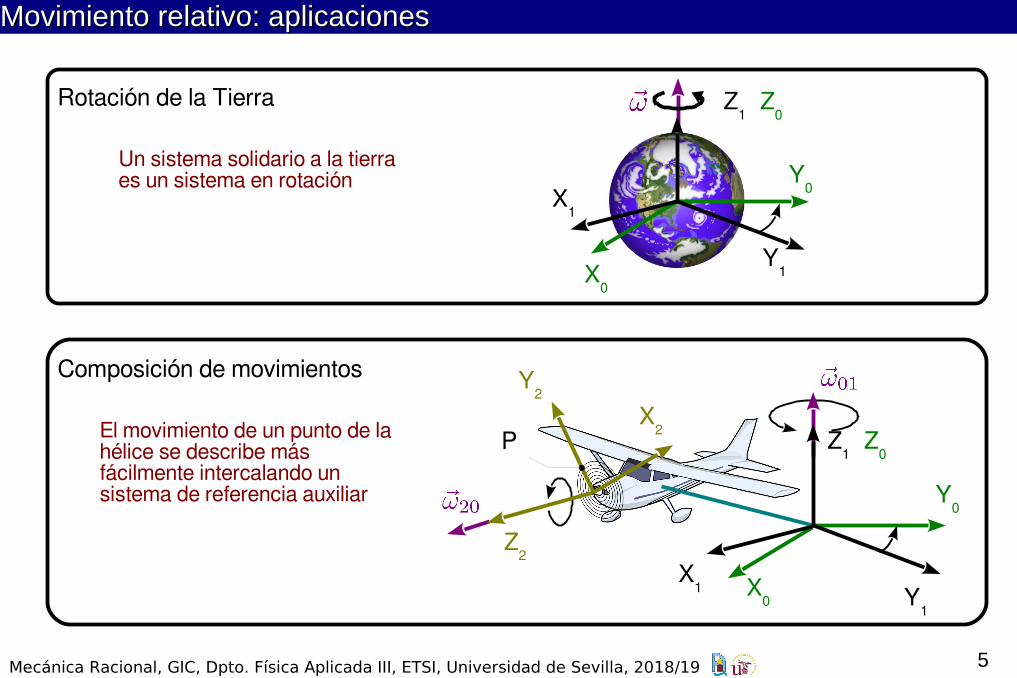
Movimiento relativo: aplicacionesMovimiento relativo: aplicaciones
Rotación de la Tierra
Un sistema solidario a la tierra es un sistema en rotación
Composición de movimientos
El movimiento de un punto de la hélice se describe más fácilmente intercalando un sistema de referencia auxiliar
Z0
X0
Y0
Z0
X0
Y0
X2
Y2
Z2
P
X1
Y1
Z1
X1 Y1
Z1
6Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
ÍndiceÍndice
IntroducciónDerivación en triedros móvilesNotación y defnicionesComposición de velocidades
TraslacionesRotaciones
Composición de aceleracionesTraslacionesRotaciones
Pares cinemáticos. Sólidos en contacto puntualDinámica en sistemas de referencia no inerciales
7Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Derivación temporal en triedros móviles: fórmulas de PoissonDerivación temporal en triedros móviles: fórmulas de Poisson
O1
X1
Y1
Z1
1
0
OX0
Y0
Z0
0
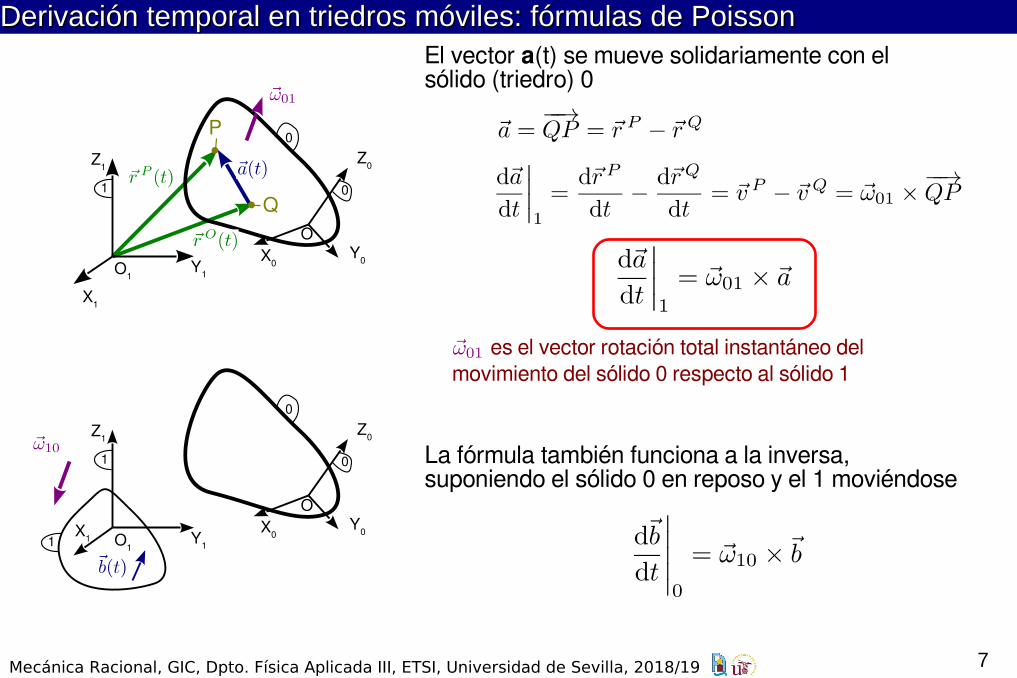
El vector a(t) se mueve solidariamente con el sólido (triedro) 0
La fórmula también funciona a la inversa, suponiendo el sólido 0 en reposo y el 1 moviéndose
O1X1 Y1
Z1
1
0
OX0
Y0
Z0
0
1
es el vector rotación total instantáneo del movimiento del sólido 0 respecto al sólido 1
P
Q
8Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Derivación temporal en triedros móviles: fórmulas de PoissonDerivación temporal en triedros móviles: fórmulas de Poisson
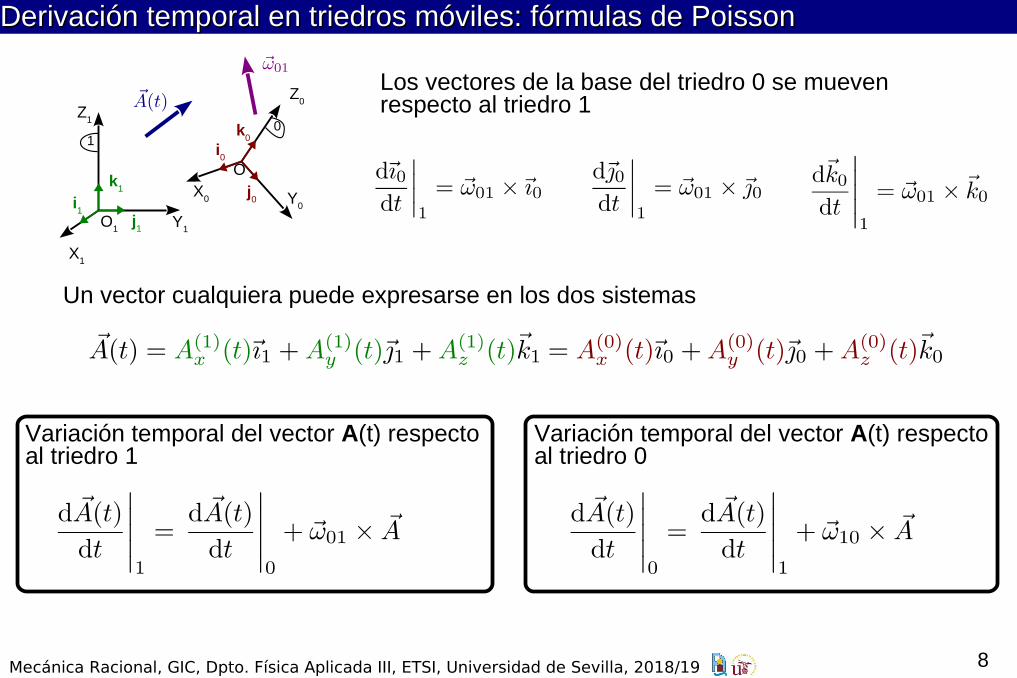
Los vectores de la base del triedro 0 se mueven respecto al triedro 1
Un vector cualquiera puede expresarse en los dos sistemas
OX
0 Y0
Z0
0
i0
j0
k0
O1
X1
Y1
Z1
1
i1
j1
k1
Variación temporal del vector A(t) respecto al triedro 1
Variación temporal del vector A(t) respecto al triedro 0
9Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
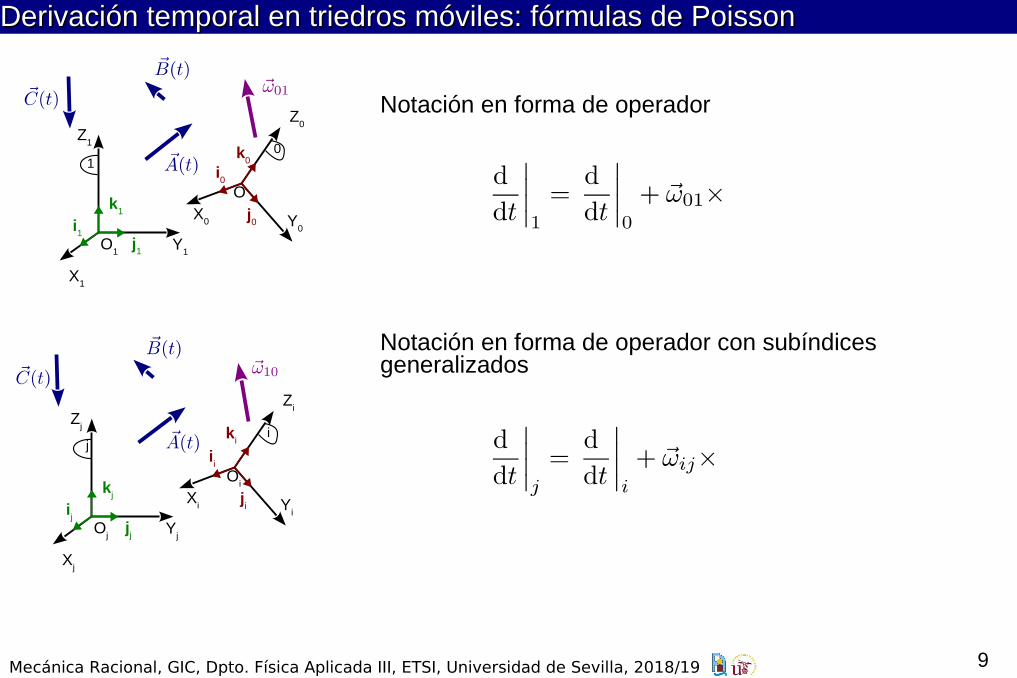
Derivación temporal en triedros móviles: fórmulas de PoissonDerivación temporal en triedros móviles: fórmulas de Poisson
Notación en forma de operador
Notación en forma de operador con subíndices generalizados
O1
X1
Y1
Z1
1
OX
0 Y0
Z0
0
i0
j0
k0
i1
j1
k1
Oj
Xj
Yj
Zj
j
Oi
Xi Y
i
Zi
i
ii
ji
ki
ij
jj
kj
10Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
ÍndiceÍndice
IntroducciónDerivación en triedros móvilesNotación y defnicionesComposición de velocidades
TraslacionesRotaciones
Composición de aceleracionesTraslacionesRotaciones
Pares cinemáticos. Sólidos en contacto puntualDinámica en sistemas de referencia no inerciales

11Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
O2
X2
Y2
Z2
2
Notación y definicionesNotación y definiciones
O1
X1 Y
1
Z1
1
1
O
X0
Y0
Z0
0
Al moverse, los sólidos se ”atraviesan” unos a otros
En el instante posterior, cada uno de esos puntos superpuestos se mueve con su sólido correspondiente
O1
X1 Y
1
Z1
1
O
X0
Y0
Z0
0
P
Cada sólido rígido es un triedro infnito, tenga o no partes materiales
Cada punto geométrico del espacio pertenece simultáneamente a todos los sólidos defnidos
En cada punto geométrico del espacio se superponen en cada instante varios puntos
P2
P0
P1
O
X0
Y0
Z0
0
O2
X2
Y2
Z2
2

12Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Notación y definicionesNotación y definiciones
{ij} mov. del sólido ”i” respecto al sólido observador ”j”
Magnitudes cinemáticas
Velocidad angular del sólido “i” respecto al “j”
Aceleración angular del sólido “i” respecto al “j”
Vector de posición del punto P perteneciente al sólido “i” respecto al sólido “j”
Vector de velocidad del punto P perteneciente al sólido “i” respecto al sólido “j”
Vector de aceleración del punto P perteneciente al sólido “i” respecto al sólido “j”

13Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Notación y definicionesNotación y definiciones
Si sólo hay tres sólidos
”1” sólido de referencia
”0” sólido intermedio
”2” sólido problema
{21} mov. absoluto
{20} mov. relativo
{01} mov. arrastre
2
O2
X2
Y2
Z2
2
O1
X1 Y
1
Z1
1
1
O
X0
Y0
Z0
0
0
P
OP
O1P
O1O
14Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Notación y definicionesNotación y definiciones
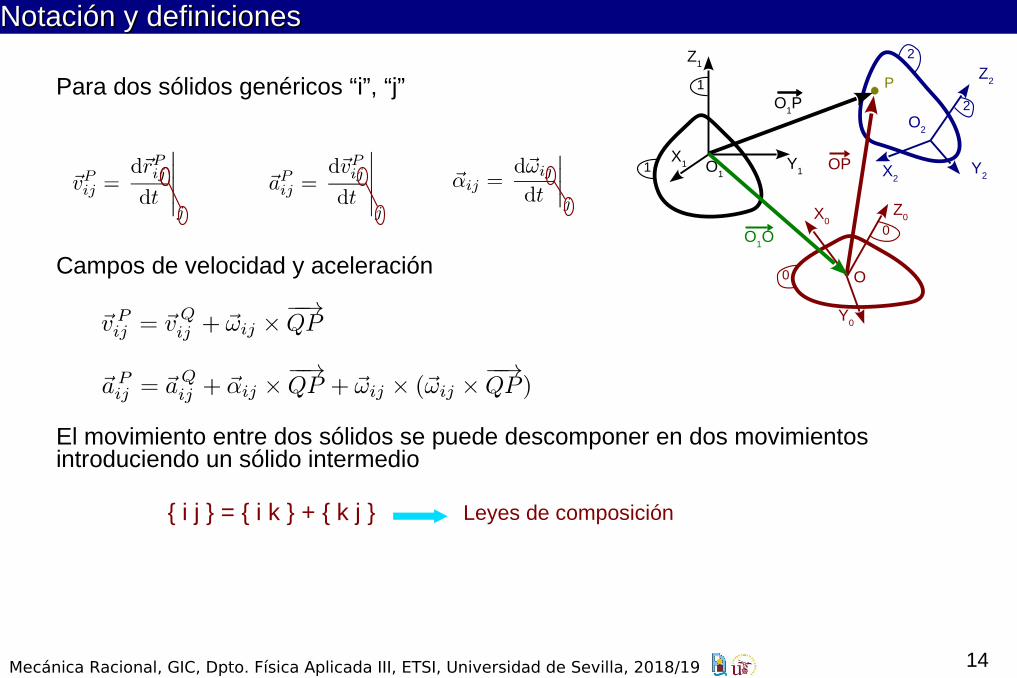
Para dos sólidos genéricos “i”, “j”
2
O2
X2
Y2
Z2
2
O1
X1 Y
1
Z1
1
1
O
X0
Y0
Z0
0
0
P
OP
O1P
O1O
Campos de velocidad y aceleración
El movimiento entre dos sólidos se puede descomponer en dos movimientos introduciendo un sólido intermedio
{ i j } = { i k } + { k j } Leyes de composición
15Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
ÍndiceÍndice
IntroducciónDerivación en triedros móvilesNotación y defnicionesComposición de velocidades
TraslacionesRotaciones
Composición de aceleracionesTraslacionesRotaciones
Pares cinemáticos. Sólidos en contacto puntualDinámica en sistemas de referencia no inerciales
16Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Composición de velocidadesComposición de velocidades2
O2
X2
Y2
Z2
2
O1
X1 Y
1
Z1
1
1
O
X0
Y0
Z0
0
0
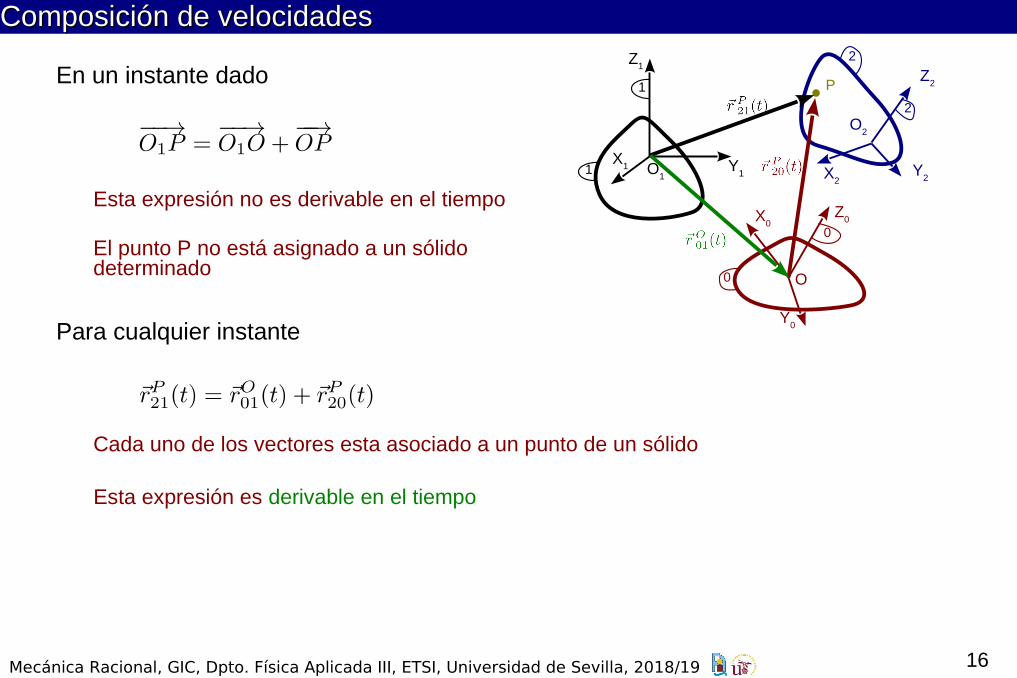
PEn un instante dado
Esta expresión no es derivable en el tiempo
Para cualquier instante
El punto P no está asignado a un sólido determinado
Cada uno de los vectores esta asociado a un punto de un sólido
Esta expresión es derivable en el tiempo
17Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Composición de velocidadesComposición de velocidades2
O2
X2Y2
Z2
2
O1X1 Y1
Z1
1
1
O
X0
Y0
Z000
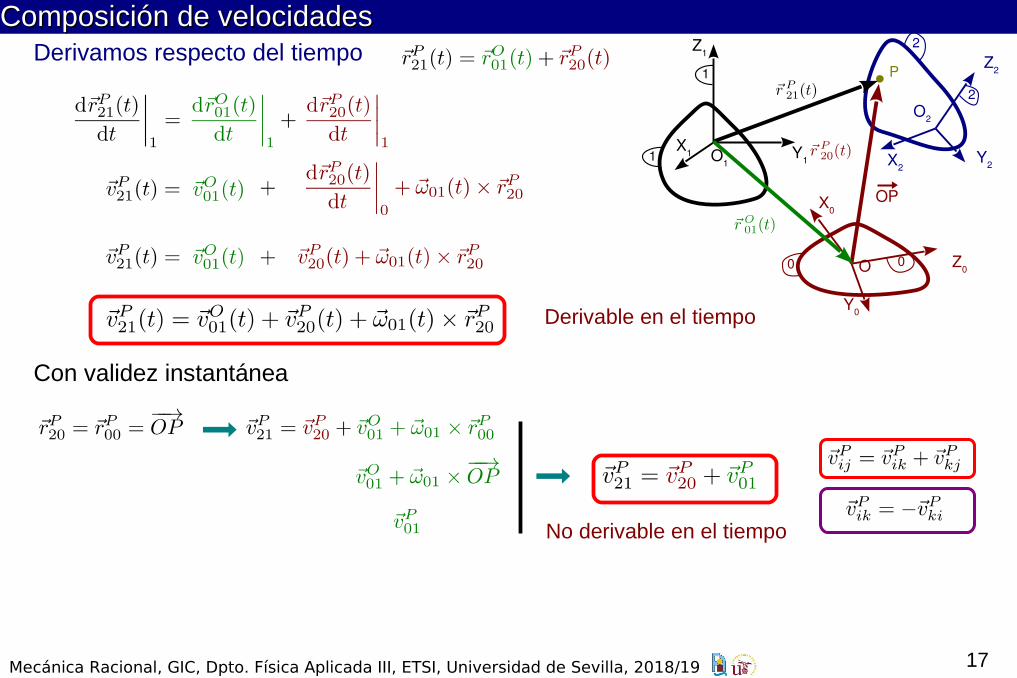
PDerivamos respecto del tiempo
Derivable en el tiempo
OP
Con validez instantánea
No derivable en el tiempo
18Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Composición de velocidades angularesComposición de velocidades angulares2
O2
X2
Y2
Z2
2
O1
X1 Y
1
Z1
1
1
O
X0
Y0
Z0
0
0
P
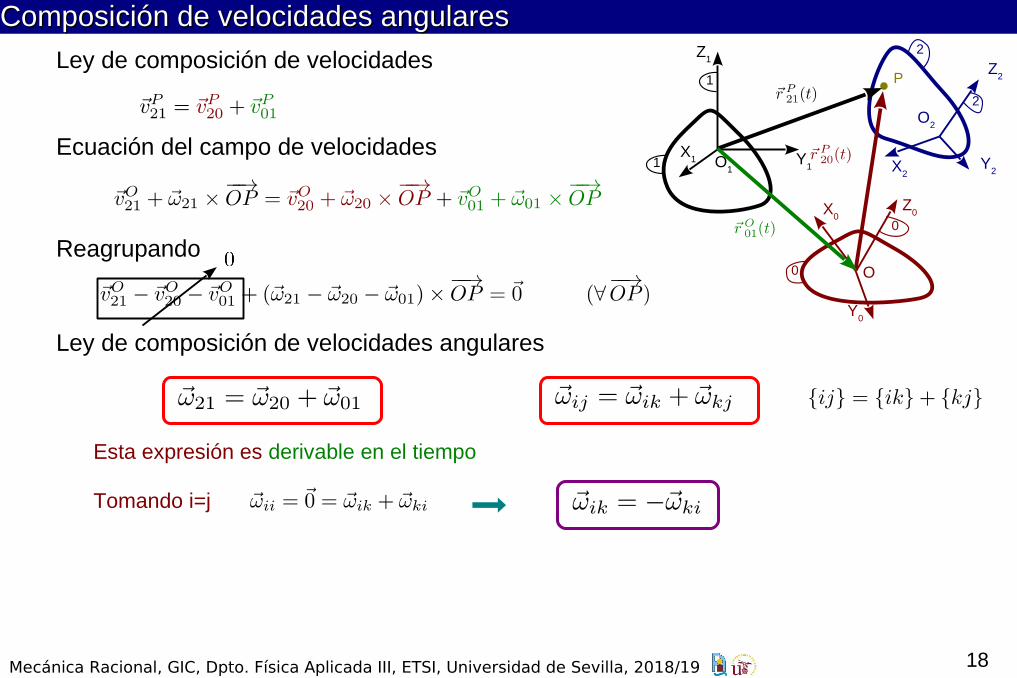
Esta expresión es derivable en el tiempo
Ley de composición de velocidades
Ecuación del campo de velocidades
Reagrupando
Ley de composición de velocidades angulares
Tomando i=j
19Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Composición de velocidades: traslaciónComposición de velocidades: traslación
X1
Y1≡Y2
Z1
Y0
Z0
X0
Z2
X2O
O2O1
P
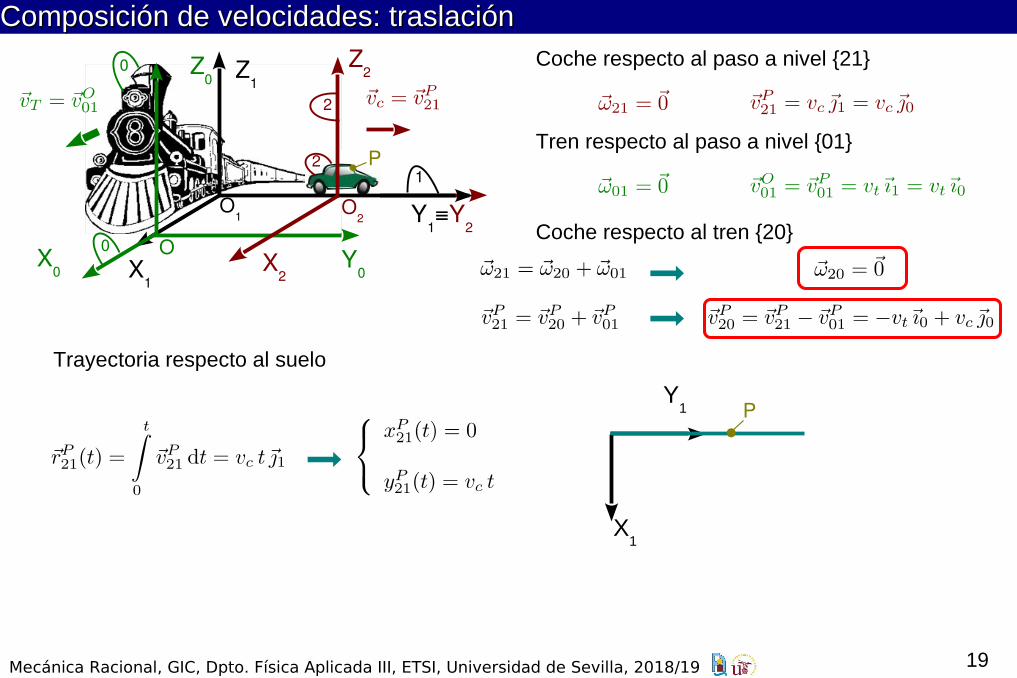
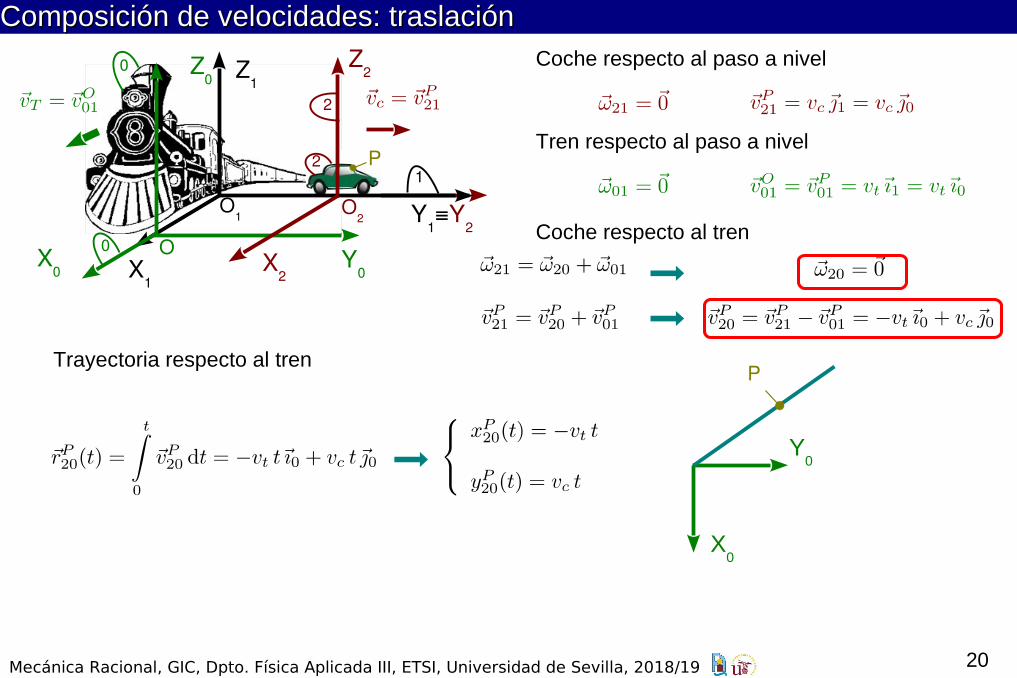
Coche respecto al paso a nivel {21}
Tren respecto al paso a nivel {01}
Coche respecto al tren {20}
Trayectoria respecto al suelo
X1
Y1 P
0
0
1
2
2
20Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Composición de velocidades: traslaciónComposición de velocidades: traslación
Trayectoria respecto al tren P
X0
Y0
X1
Z1
Y0
Z0
X0
Z2
X2O
O2O1
P
0
0
1
2
2
Y1≡Y2
Coche respecto al paso a nivel
Tren respecto al paso a nivel
Coche respecto al tren
21Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
0
Composición de velocidades: rotaciónComposición de velocidades: rotación
Z1≡Z0
Y0Y2
X2
Z2
0
2
2
P
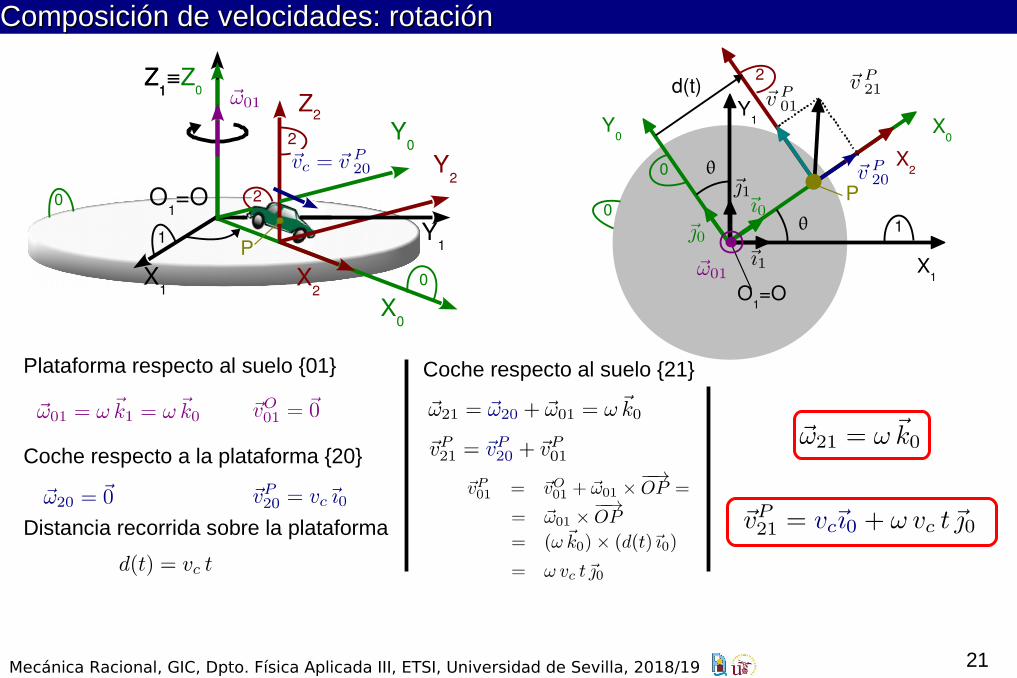
Plataforma respecto al suelo {01} Coche respecto al suelo {21}
Y1
X1
X0Y0
X2
P
d(t)
01
2
0
O1=OX0
Coche respecto a la plataforma {20}
Distancia recorrida sobre la plataforma
X1
1 Y1
O1=O
Z1
22Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
ÍndiceÍndice
IntroducciónDerivación en triedros móvilesNotación y defnicionesComposición de velocidades
TraslacionesRotaciones
Composición de aceleracionesTraslacionesRotaciones
Pares cinemáticos. Sólidos en contacto puntualDinámica en sistemas de referencia no inerciales
23Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Composición de aceleracionesComposición de aceleraciones
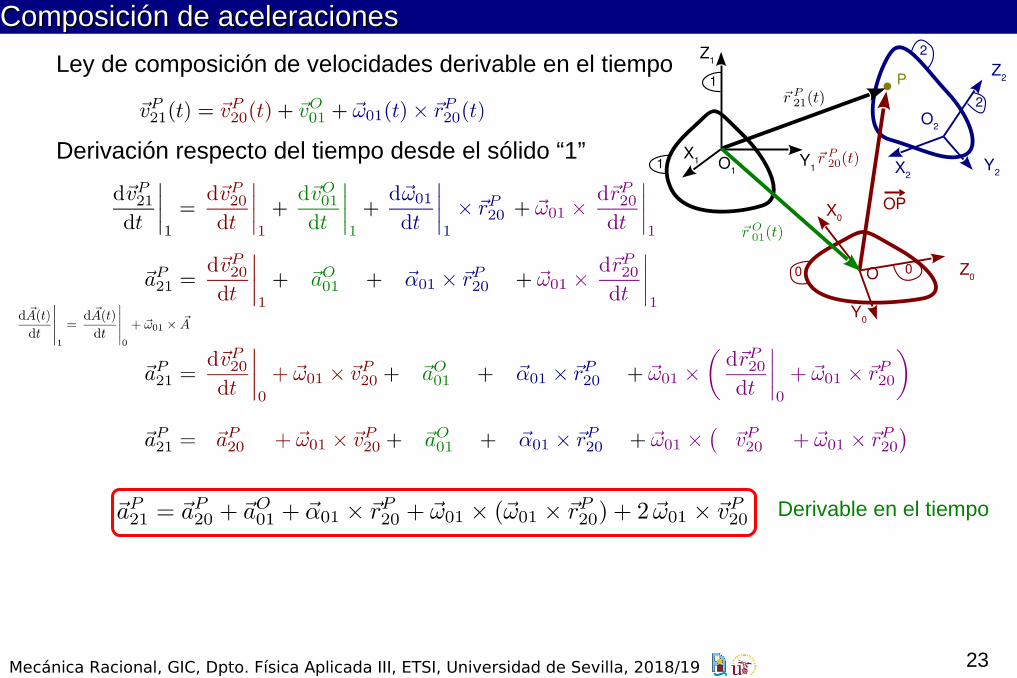
Derivación respecto del tiempo desde el sólido “1”
Ley de composición de velocidades derivable en el tiempo
Derivable en el tiempo
2
O2
X2Y2
Z2
2
O1X1 Y1
Z1
1
1
O
X0
Y0
Z000
P
OP
24Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
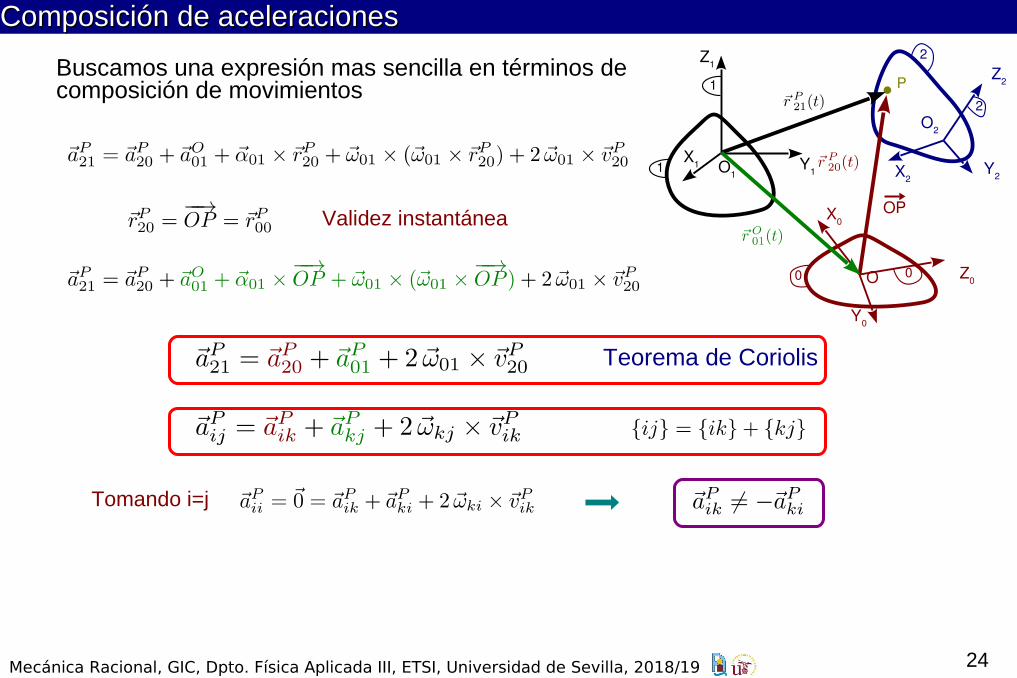
Composición de aceleracionesComposición de aceleraciones
Buscamos una expresión mas sencilla en términos de composición de movimientos
Validez instantánea
Teorema de Coriolis
Tomando i=j
2
O2
X2Y2
Z2
2
O1X1 Y1
Z1
1
1
O
X0
Y0
Z000
P
OP
25Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
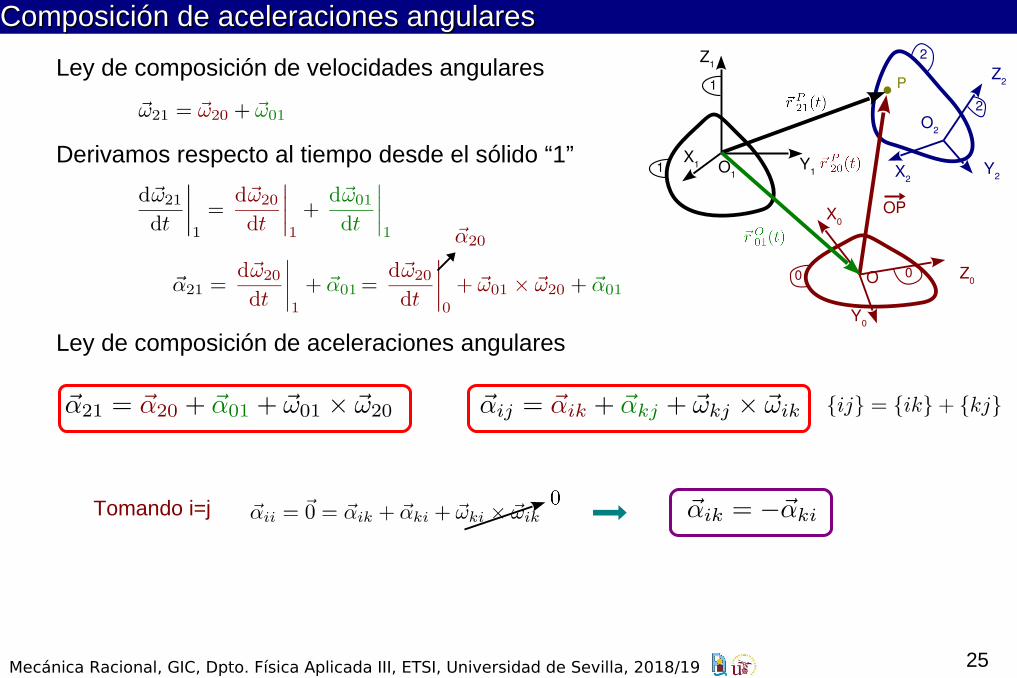
Composición de aceleraciones angularesComposición de aceleraciones angulares
Derivamos respecto al tiempo desde el sólido “1”
Ley de composición de aceleraciones angulares
Tomando i=j
Ley de composición de velocidades angulares2
O2
X2Y2
Z2
2
O1X1 Y1
Z1
1
1
O
X0
Y0
Z000
P
OP
26Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
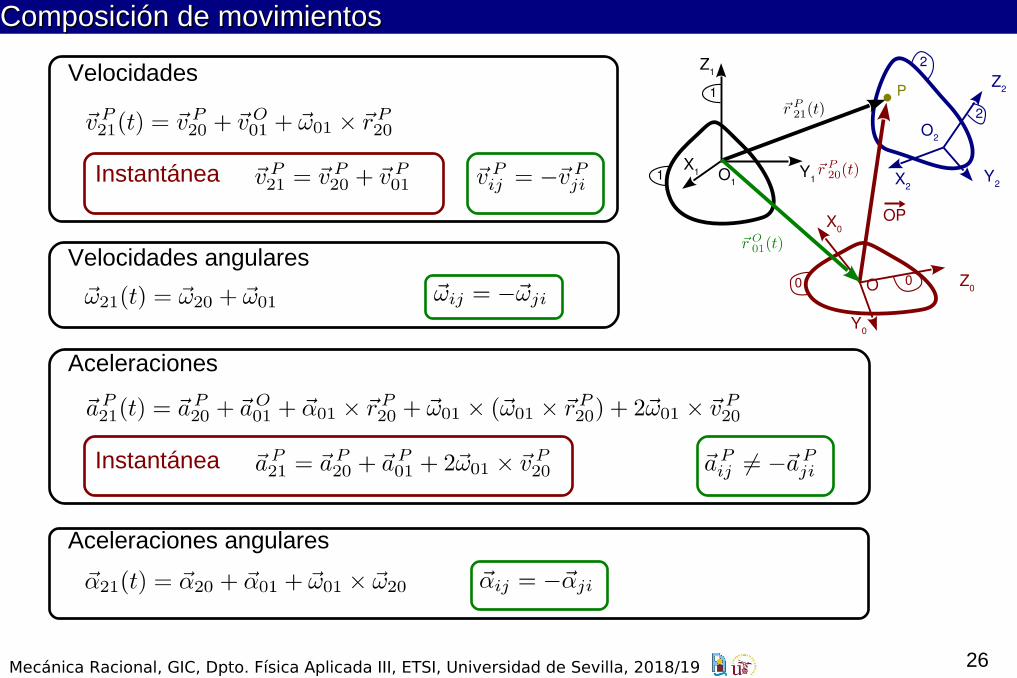
Composición de movimientosComposición de movimientos
Velocidades
Velocidades angulares
Aceleraciones
Aceleraciones angulares
Instantánea
Instantánea
2
O2
X2Y2
Z2
2
O1X1 Y1
Z1
1
1
O
X0
Y0
Z000
P
OP
27Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
ÍndiceÍndice
IntroducciónDerivación en triedros móvilesNotación y defnicionesComposición de velocidades
TraslacionesRotaciones
Composición de aceleracionesTraslacionesRotaciones
Pares cinemáticos. Sólidos en contacto puntualDinámica en sistemas de referencia no inerciales
28Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
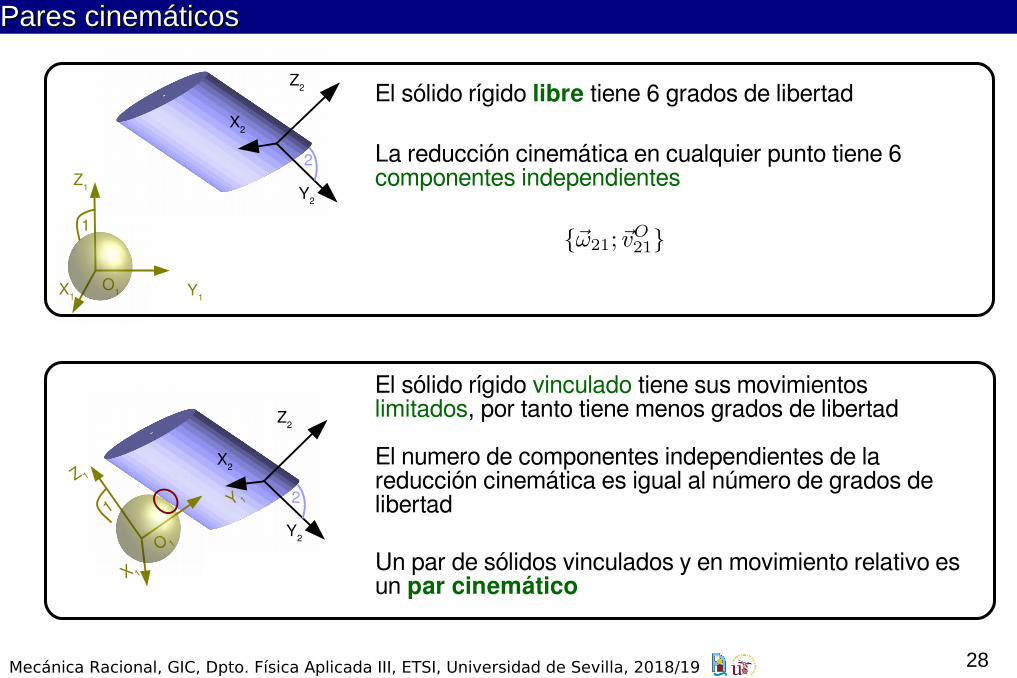
Pares cinemáticosPares cinemáticos
El sólido rígido libre tiene 6 grados de libertad
Y1X1
Z1
O1
X2
Y2
Z2
2
1
El sólido rígido vinculado tiene sus movimientos limitados, por tanto tiene menos grados de libertad
La reducción cinemática en cualquier punto tiene 6 componentes independientes
X2
Y2
Z2
2Y 1
X 1
Z 1
O 1
1
El numero de componentes independientes de la reducción cinemática es igual al número de grados de libertad
Un par de sólidos vinculados y en movimiento relativo es un par cinemático
29Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
1
Sólidos en contacto puntual (par esférico instantáneo)Sólidos en contacto puntual (par esférico instantáneo)
O
2
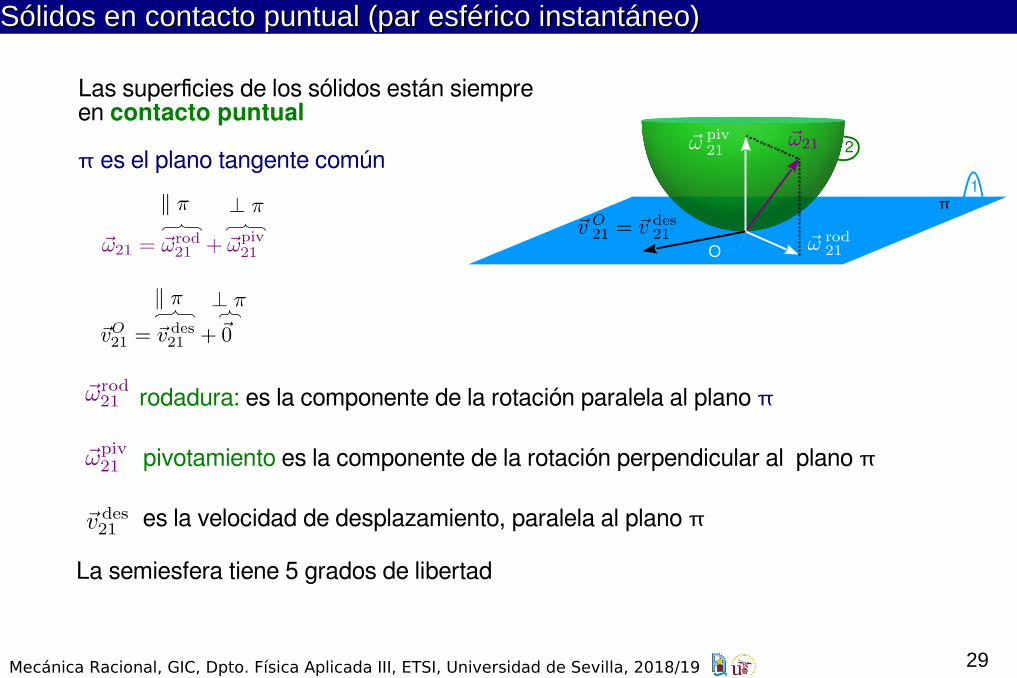
Las superfcies de los sólidos están siempre en contacto puntual
rodadura: es la componente de la rotación paralela al plano
pivotamiento es la componente de la rotación perpendicular al plano
es la velocidad de desplazamiento, paralela al plano
La semiesfera tiene 5 grados de libertad
es el plano tangente común
30Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
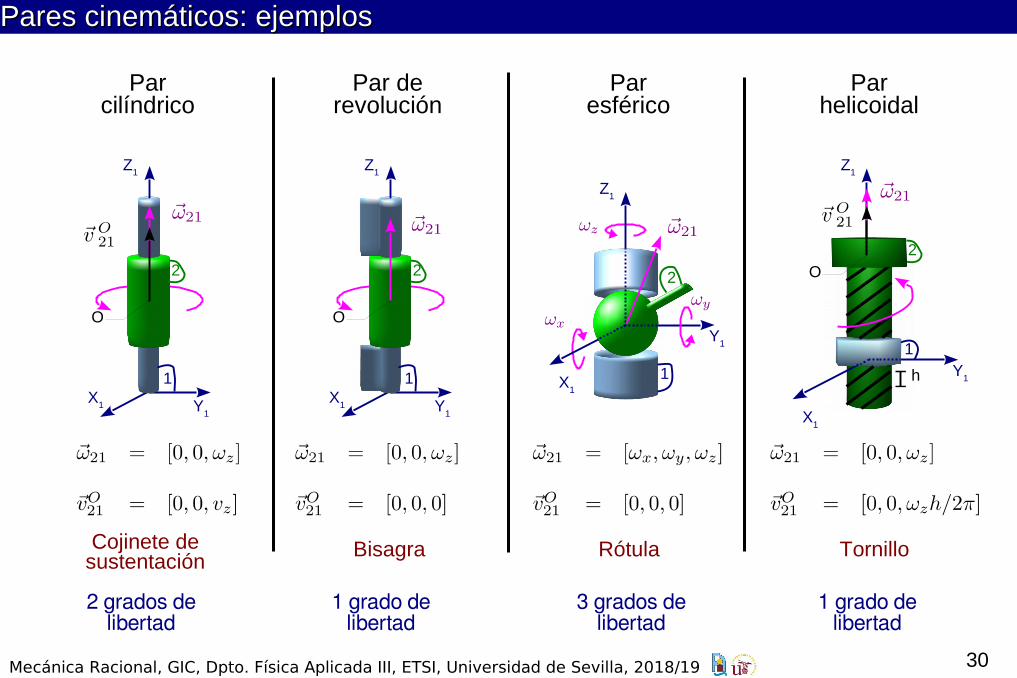
Pares cinemáticos: ejemplosPares cinemáticos: ejemplos
2
1X
1 Y1
Z1
O
Parcilíndrico
2
1X
1 Y1
Z1
O
Par derevolución
X1
Z1
1
2
Paresférico
Y1
O
Z1
2
1
X1
Y1h
Parhelicoidal
Cojinete de sustentación
Bisagra Rótula Tornillo
2 grados de libertad
1 grado de libertad
3 grados de libertad
1 grado de libertad

31Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
ÍndiceÍndice
IntroducciónDerivación en triedros móvilesNotación y defnicionesComposición de velocidades
TraslacionesRotaciones
Composición de aceleracionesTraslacionesRotaciones
Pares cinemáticos. Sólidos en contacto puntualDinámica en sistemas de referencia no inerciales
32Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
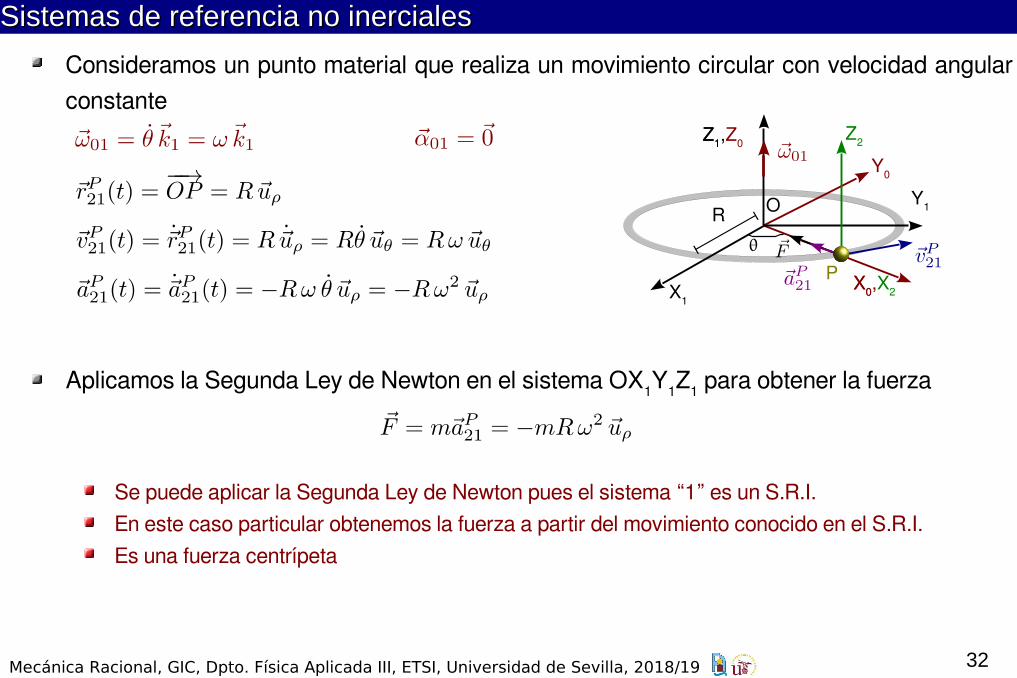
Sistemas de referencia no inercialesSistemas de referencia no inerciales
Consideramos un punto material que realiza un movimiento circular con velocidad angular constante
Aplicamos la Segunda Ley de Newton en el sistema OX1Y1Z1 para obtener la fuerza
Se puede aplicar la Segunda Ley de Newton pues el sistema “1” es un S.R.I.En este caso particular obtenemos la fuerza a partir del movimiento conocido en el S.R.I.Es una fuerza centrípeta
R
Y0
Z1,Z0
X0X1
Y1
Z1
O
X0,X2
Z2
P
33Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Sistemas de referencia no inercialesSistemas de referencia no inerciales
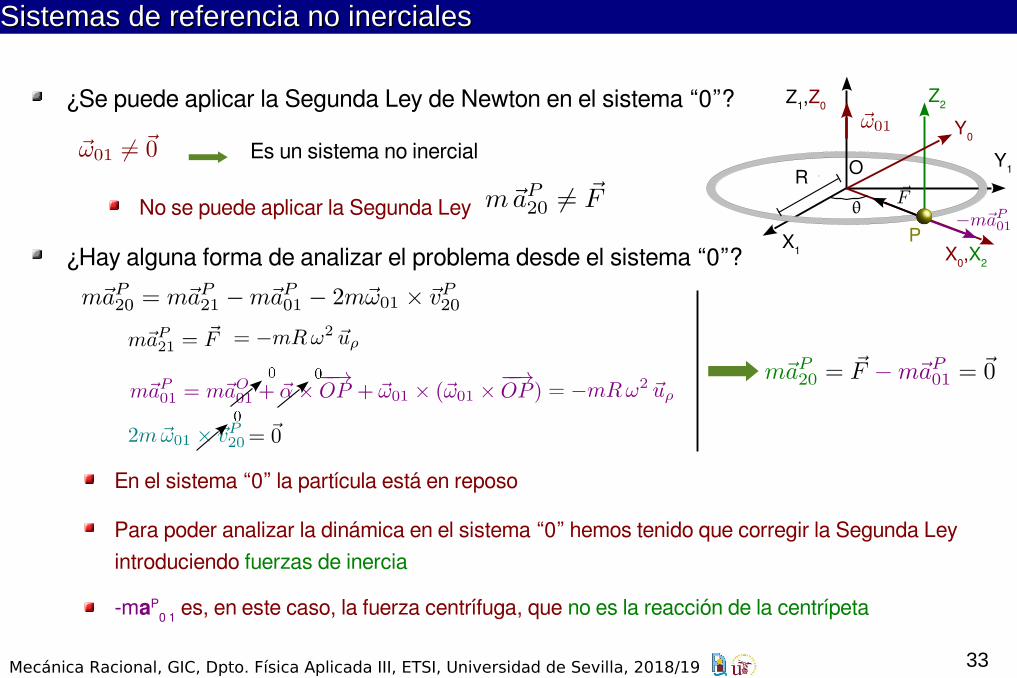
¿Se puede aplicar la Segunda Ley de Newton en el sistema “0”?
¿Hay alguna forma de analizar el problema desde el sistema “0”?
En el sistema “0” la partícula está en reposo
Y1Es un sistema no inercial
No se puede aplicar la Segunda Ley
Para poder analizar la dinámica en el sistema “0” hemos tenido que corregir la Segunda Ley introduciendo fuerzas de inercia
X1
Z1,Z0
X0,X2
Y0
P
Z2
R O
-maP0 1 es, en este caso, la fuerza centrífuga, que no es la reacción de la centrípeta

34Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Sistemas de referencia no inercialesSistemas de referencia no inerciales
S.R.I.
1
0
S.R. no inercial
O
Pm 2
Segunda Ley de Newton en un sistema no inercial en el caso general (0 1≠0 y/o aO0 1≠0 )
F es la fuerza neta real en el S.R.I (debida a interacciones)
Fa r r es la fuerza de arrastre
Fc o r es la fuerza de Coriolis
Propiedades de la fuerzas de inercia
Son aparentes o fcticias para el observador inercial, pero para el no inercial tienen los mismos efectos que una fuerza real (realizan trabajo, pueden ser conservativas)
Son proporcionales a la masaNo añaden incógnitas al problema dinámico {20} (conocido el movimiento {01})
35Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Fuerza de CoriolisFuerza de Coriolis
0 1
X1
Y1
X0
Z1,Z
0
Y0
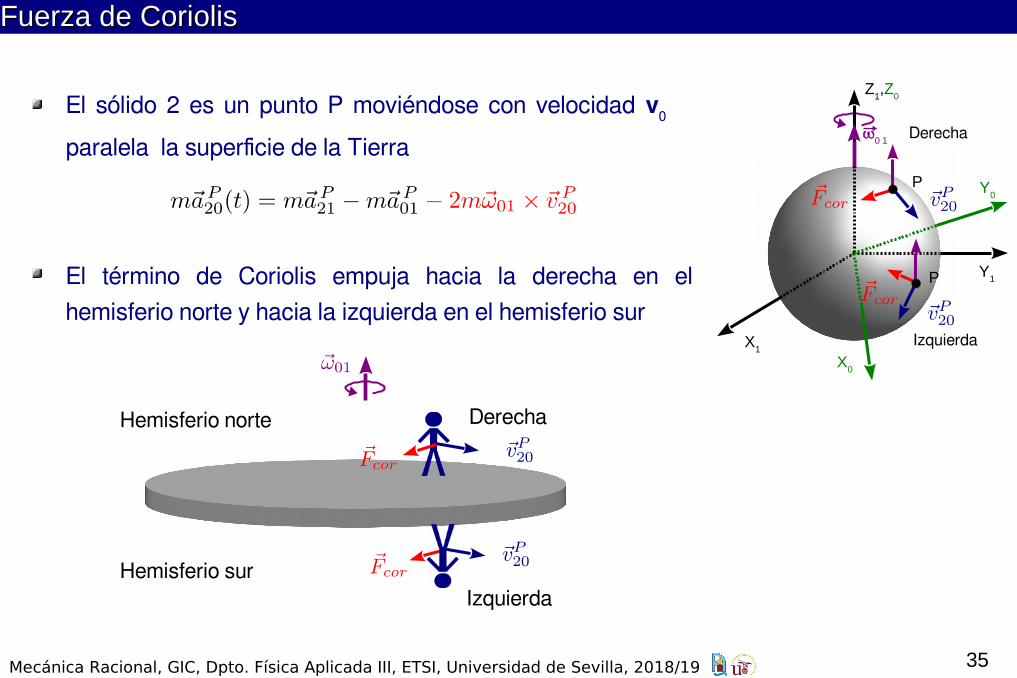
El término de Coriolis empuja hacia la derecha en el hemisferio norte y hacia la izquierda en el hemisferio sur
El sólido 2 es un punto P moviéndose con velocidad v0 paralela la superfcie de la Tierra
P
P
Derecha
Izquierda
Derecha
Izquierda
Hemisferio norte
Hemisferio sur

36Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Fuerza de CoriolisFuerza de Coriolis
Este efecto se deja sentir sólo en sistemas de tamaño muy grande o que se mueven muy rápido, o en los que se acumula el efecto en el tiempo
HuracanesPéndulo de FoucaultEl efecto en el sentido de giro del agua en los desagües es despreciable
37Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Fuerza de Coriolis: sentido de giro de los huracanesFuerza de Coriolis: sentido de giro de los huracanes
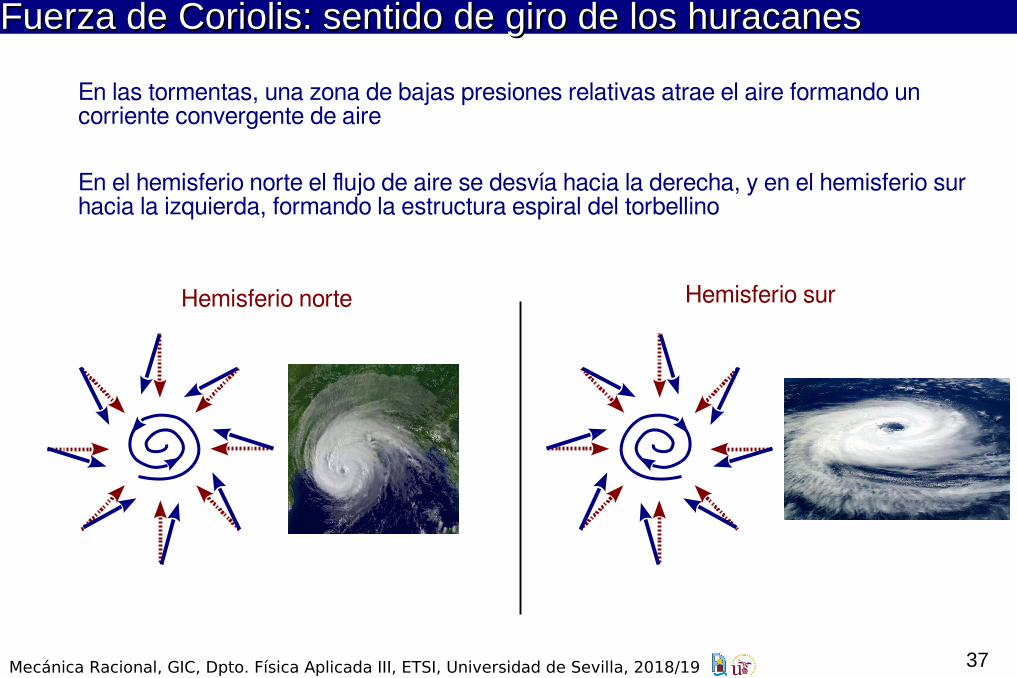
En las tormentas, una zona de bajas presiones relativas atrae el aire formando un corriente convergente de aire
En el hemisferio norte el fujo de aire se desvía hacia la derecha, y en el hemisferio sur hacia la izquierda, formando la estructura espiral del torbellino
Hemisferio norte Hemisferio sur
38Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Fuerza de Coriolis: péndulo de FoucaultFuerza de Coriolis: péndulo de Foucault
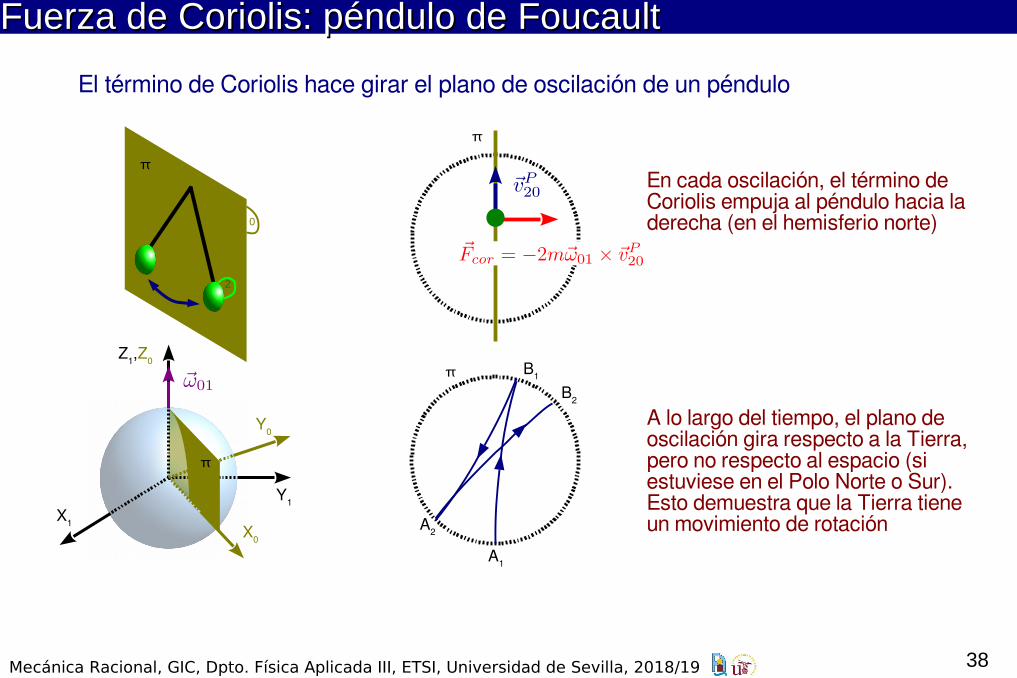
El término de Coriolis hace girar el plano de oscilación de un péndulo
X1
Y1
X0
Z1,Z0
Y0
En cada oscilación, el término de Coriolis empuja al péndulo hacia la derecha (en el hemisferio norte)
2
0
A1
B1
A2
B2
A lo largo del tiempo, el plano de oscilación gira respecto a la Tierra, pero no respecto al espacio (si estuviese en el Polo Norte o Sur). Esto demuestra que la Tierra tiene un movimiento de rotación
39Mecánica Racional, GIC, Dpto. Física Aplicada III, ETSI, Universidad de Sevilla, 2018/19
Fuerza de Coriolis: péndulo de FoucaultFuerza de Coriolis: péndulo de Foucault
Experimento de Foucault enel Pantheon en París, 1851
Péndulo de Foucault enel Pantheon en París, en la actualidad