represantación de la posición y orientaciónvivas/ayr2iaei/pos_or.pdf · transformaciones...
TRANSCRIPT

Represantación Represantación de la Posición y de la Posición y OrientaciónOrientación
1
Control y Programación de
Robots

■ Representación de la posición
■ Representación de la orientación
■ Matrices de transformación homogénea
■ Relación y comparación entre métodos
Herramientas matemáticas para la localización espacial
2

Herramientas matemáticas para la localización espacial
3
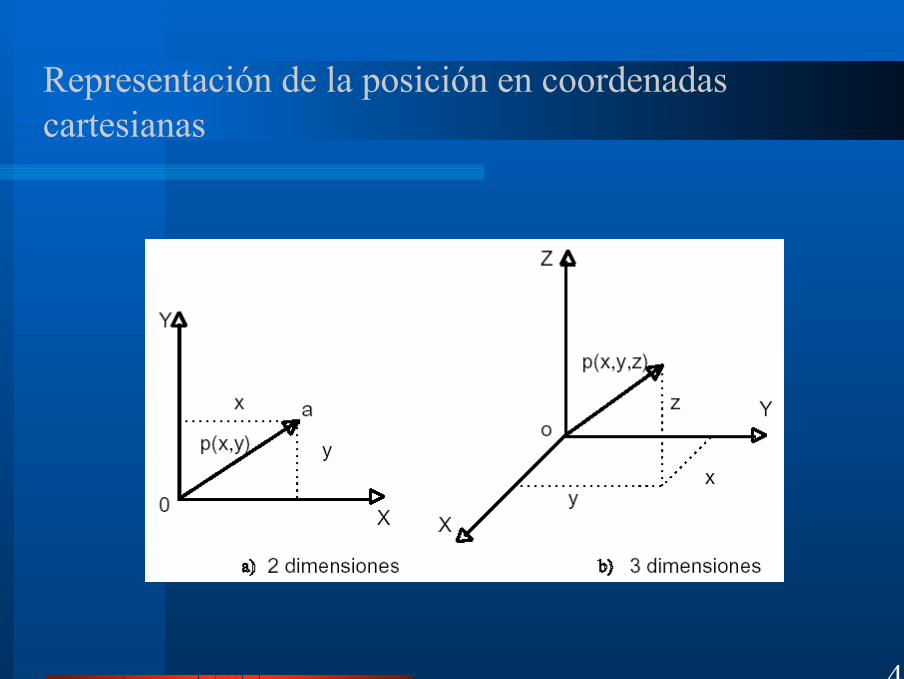
Representación de la posición en coordenadas cartesianas
4
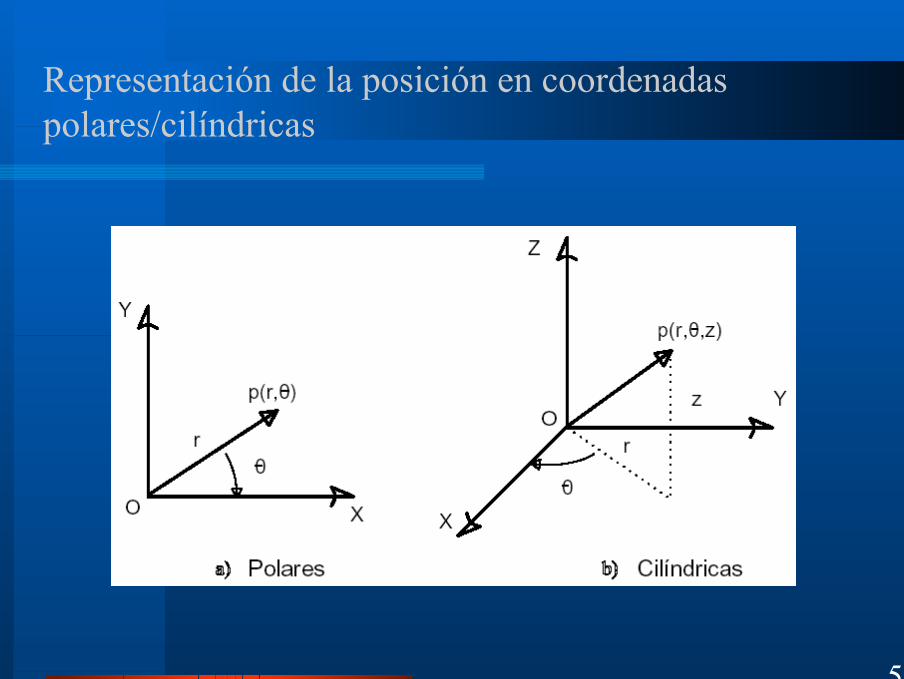
Representación de la posición en coordenadas polares/cilíndricas
5

Representación de la posición en coordenadas esféricas
6

Representación de la orientación: Matrices de Rotación 2D
7

Representación de la orientación: Matrices de Rotación 3D (I)
8

Representación de la orientación: Matrices de Rotación 3D (II)
9

Representación de la orientación:Composición de rotaciones
10

Representación de la orientación:Comentarios adicionales (Angulos de Euler)
11
Los ángulos de Euler No son equivalentes a la composición de rotaciones

12
Representación de la orientación:Comentarios adicionales (Representación RPY)
La representación RPY es equivalente a la composición de rotaciones

13
Representación de la orientación:Par de rotación

14
Marcos de Referencia: Descripción
Desplazamientos puros
YA
xB
xA
ZA
YBZB
BPAP YA
xB
xA
ZA
YB
ZB BPAP
AB D
DPP AB
BA +=
Rotaciones Puras
PRP BAB
A =
YA
xB
xA
ZA
YB
ZB
BPAPComposición Rotación+Translación
DPRP AB
BAB
A +=

Transformaciones HomogéneasTransformaciones Homogéneas
1
Sistema genérico de coordenadas para expresar cambios de coordenadas entre marcos de referencia tridimensionales.
=
10DR
TAB
AB
BA
YA
xB
xA
ZA
YB
ZB
BPAP
PTP BB
AA =
Relación de Transformación.
RAB Matriz de Rotación de la Transformación
DAB Vector de desplazamiento de la Transformación

Transformaciones Homogéneas: Traslaciones purasTransformaciones Homogéneas: Traslaciones puras
1

Transformaciones Homogéneas: Traslaciones purasTransformaciones Homogéneas: Traslaciones puras
1
Ejemplo de Traslación.

Transformaciones Homogéneas: Rotaciones purasTransformaciones Homogéneas: Rotaciones puras
18

Transformaciones Homogéneas: Rotaciones purasTransformaciones Homogéneas: Rotaciones puras
19
Ejemplo de Rotación

Transformaciones Homogéneas: Combinación de Transformaciones Homogéneas: Combinación de Rotación + TraslaciónRotación + Traslación
20
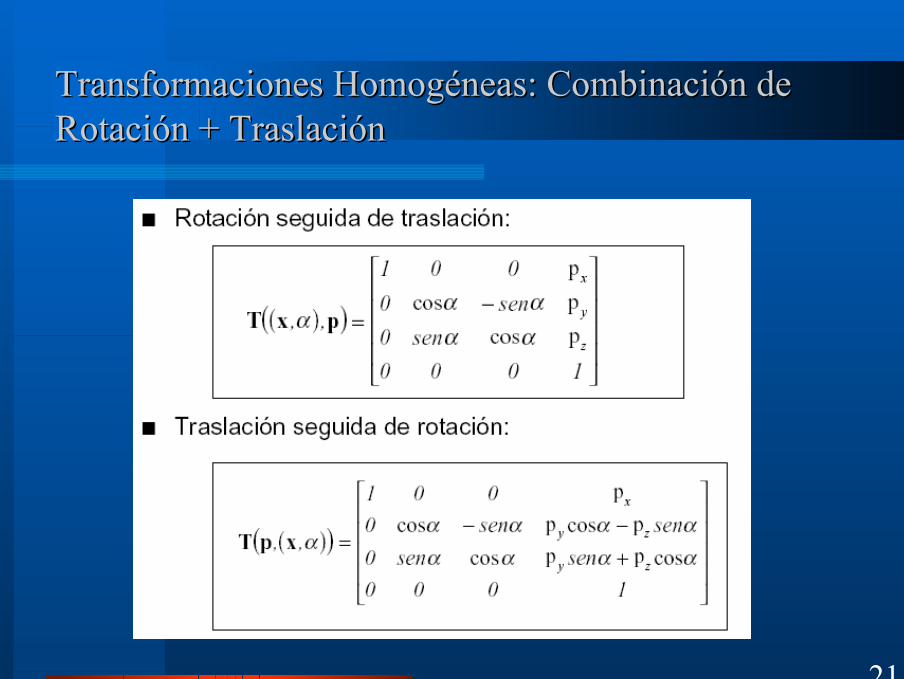
Transformaciones Homogéneas: Combinación de Transformaciones Homogéneas: Combinación de Rotación + TraslaciónRotación + Traslación
21
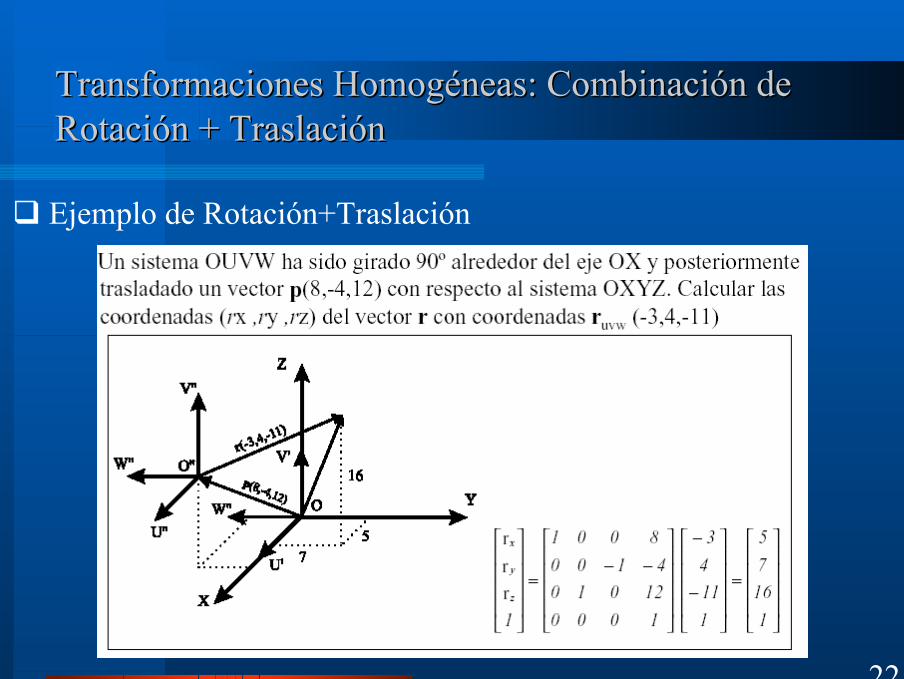
Transformaciones Homogéneas: Combinación de Transformaciones Homogéneas: Combinación de Rotación + TraslaciónRotación + Traslación
22
Ejemplo de Rotación+Traslación

Transformaciones Homogéneas: Significado Transformaciones Homogéneas: Significado GeométricoGeométrico
23

Transformaciones Homogéneas: Matriz InversaTransformaciones Homogéneas: Matriz Inversa
24

Transformaciones Homogéneas: Composición de Transformaciones Homogéneas: Composición de matricesmatrices
25

Comparación entre métodos de localización espacial
26
Matrices de
transformación
homogénea
Angulos de
Euler
Par de
rotación
• Posición y orientación
de forma conjunta
• Comodidad
• Notación compacta
• Notación compacta
• Alto nivel de redundancia(12 compon. para 6 gdl)
• Coste computacional
• Sólo orientación
• Dificultad de manejo para composición
• Sólo orientación
• Dificultad de manejo para composición
Método Ventajas Inconvenientes