proyecto mecanismos 1 terminado
TRANSCRIPT
Universidad Tecnológica EquinoccialInforme De Proyecto “Mecanismos”
Materia:
Mecanismos.
Profesor:
Ing. Loor Vela Raúl Eduardo.
Tema:
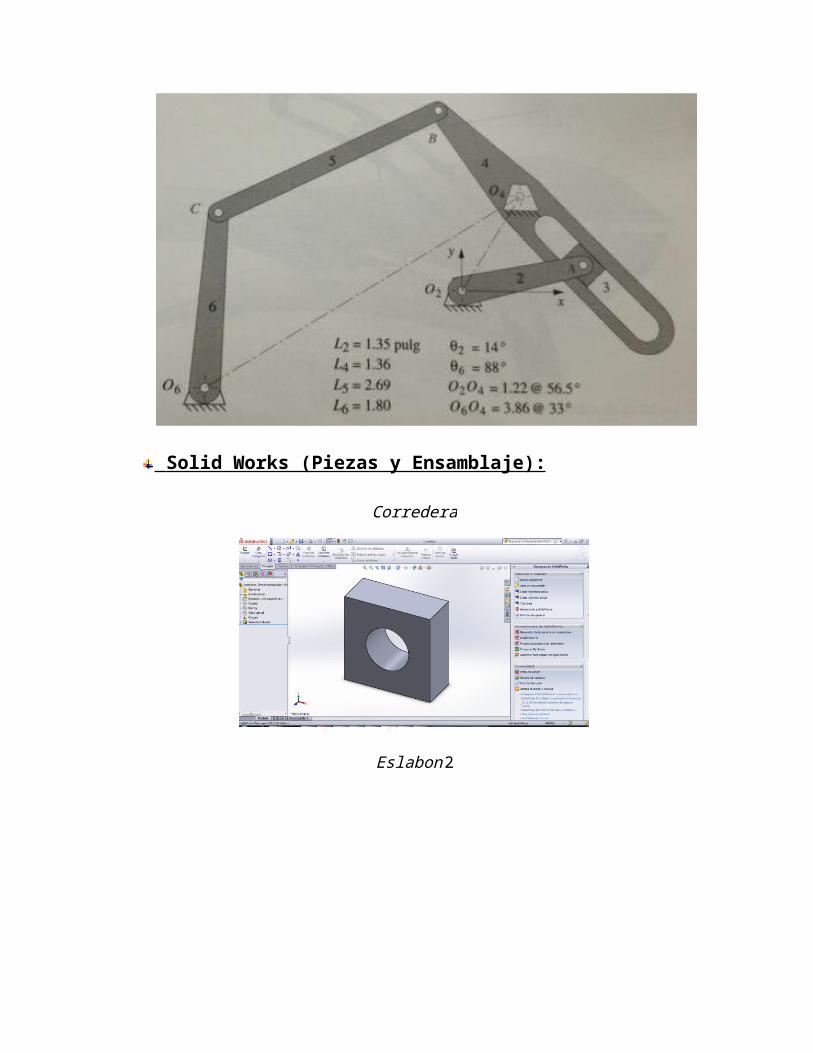
“Análisis de posición, velocidad y aceleración a todo tiempo de un Mecanismo de 6 barras”.
Autores:
Evelyn Gutiérrez.
Febrero 2013 – Julio 2013

Resumen:
Es fundamental que en la carrera Mecatrónica, exista un área muy importante de la
ingeniería que es la Mecánica; por tal razón el propósito del siguiente trabajo es analizar
el comportamiento cinemático de un sistema mecánico compuesto por eslabonamiento y
juntas.
El proyecto trata en sí, el análisis de movimiento de cada uno de los nodos, en una cadena
cinemática de un mecanismo de 6 barras. Con la ayuda de equipo computarizado
(software), se puede realizar un análisis más preciso del tipo de movimiento que describe
cada parte del mecanismo, mediante gráficas computarizadas para brindar un mejor
análisis y perspectiva del comportamiento cinemático del mecanismo.
Palabras Clave:
Mecanismo: Sistema de elementos acomodados para transmitir movimiento de una forma
predeterminada.
Cadena Cinemática: Ensamble de eslabones y juntas interconectadas que producen un movimiento
controlado en respuesta a un movimiento suministrado.
Corredera: Eslabón que se desliza a través de una junta prismática.
Manivelas: Es un mecanismo que transforma un movimiento circular en un movimiento de traslación, o viceversa.
Abstract
It is essential that in the race Mechatronics, there is a very important area of engineering mechanics is by this reason the purpose of this work is to analyze the kinematic behavior of a mechanical system composed of linkage and joints.The project itself is, motion analysis of each of the nodes in a kinematic chain mechanism 7 bars. With the help of computerized equipment (software), you can perform a more accurate analysis of the type of motion that describes each part of the mechanism through
computer graphics to provide a better perspective of behavior analysis and kinematic mechanism.
Key Words:
Kinematic: is the branch of classical mechanics that describes the motion of points, bodies (objects)
and systems of bodies (groups of objects) without consideration of the causes of motion.
Linkage: It’s a rigid body with one or more nodes in its extremes.
Mechanism: A system of element s arranged to transmit movement of a default.
Chain Kinematic: Assembly inters connected links and joints which produce a controlled movement
in response to a movement provided.
Cranks: A mechanism that transforms circular motion into a translational motion.
Objetivo General:
Analizar el comportamiento cinemático de un sistema mecánico compuesto por eslabonamientos y
juntas mediante el software adecuado.
Objetivos Específicos:
Verificar si lo planteado en los dos diferentes software coinciden y comprender sus
funcionamientos por medio del análisis de cada uno de sus puntos en los dos software.
Comprobar el movimiento del mecanismo a través del análisis de posición, velocidad y aceleración
en cada una de las herramientas de software para llegar a una conclusión general del
comportamiento del mecanismo.
Alcance: El Alcance del siguiente proyecto es analizar y conocer estas magnitudes cinemáticas de posición,
velocidad y aceleración del mecanismo en función del tiempo.
Introducción:
Básicamente la cinemática de máquinas estudia la posición y su relación con el tiempo. Específicamente nos interesa la posición, la velocidad y la aceleración de los puntos con la posición angular, la velocidad angular y la aceleración angular de los cuerpos sólidos. El movimiento lineal y el movimiento angular son suficientes para describir la posición, la velocidad y la aceleración de los
cuerpos sólidos. La mayor parte de este curso con frecuencia se refiere a la cinemática de los mecanismos, en donde el objetivo principal es el estudio de la geometría del movimiento.
Marco Teórico
El concepto de mecanismo tiene su origen en el término latino mechanisma y se refiere a la totalidad
que forman los diversos componentes de una maquinaria y que se hallan en la disposición propicia
para su adecuado funcionamiento.
En las máquinas, se llama mecanismo a la agrupación de sus componentes que son móviles y se
encuentran vinculados entre sí a través de diversas clases de uniones; esto hace que dicha estructura
pueda transmitir fuerzas y movimientos. El mecanismo es el encargado de permitir dicha transmisión.
Para que un mecanismo sea considerado como tal es necesario que se encuentre formado por una
serie de componentes, los cuales son: eslabón (elemento rígido que transmite el movimiento de un
lugar a otro fundamental para que el mecanismo se active), nodo (unifica dos eslabones entre sí para
que a través de él se comunique el movimiento) y junta, también conocida como par cinemático,
(permite que eslabón y nodo funcionen correctamente, indicando la unión entre los diferentes
eslabones como partes de un todo).
Solid Works (Piezas y Ensamblaje):
Corredera
Eslabon2
Eslabon 4
Eslabon5
Eslabon6
PinDoble
Pin
Ensamble
Movilidad:
Datos:
L=6J1=7J2=0
M=3 (L−1 )−2J1−J 2
M=3 (6−1 )−2(7)−0
M=3 (5 )−14
M=1GDL
Análisis de Posición:
a= 1,35pulg;
e = 1,22pulg@56,5°;
f = 3,86pulg@33°;
b = 1,36pulg;
c = 2,69pulg;
d = 1,80pulg;
rA=a¿
rO4=e¿
rA /O 4=rA−rO4 →UA /O 4= rA /O 4|rA /O 4|
=(cosαi−cosβj)
UA /O 4= rA /O 4|rA /O 4|
rB /O 4=b(−UA /O 4)
rB=rO4+rB /O 4=(Bxi+Byj)
rO6=rO4+rO6/O 4=(O6 xi+O 6 yj)
r 06 /O 4=f ¿
c2=(Bx−Cx)2+(By−Cy )2 1
d2=(Cx−O6 x )2+(Cy−O 6 y)2 2

c2−d2=B x2−2BxCx+C x2+B y2−2 ByCy+Cy2−C x2+2O 6 xCx−O 6 x2−C y2+2O 6 yCy−O 6 y2
c2−d2=−2 (Bx−O 6 x )Cx−2 (By−O 6 y )Cy+B x2+B y2−O 6 x2−O6 y2
Cx=(O 6 y−By)(Bx−O 6 x)
Cy+B x2+B y2−O 6 x2−O6 y2−c2+d2
2(Bx−O 6x )
Cx=TCy+S 3
c2=[Bx−(TCy+S )]2+(By−Cy )2
3 en 1
c2=[Bx−(TCy+S )]2+(By−Cy )2
c2=B x2−2Bx (TCy+S )+(TCy+S )2+B y2−2ByCy+C y2
c2=B x2−2BxTCy−2BxS+T 2Cy2+2TCyS+S2+B y2−2ByCy+C y2
c2−s2−b2=T 2Cy2+C y2−2 BxTCy−2 ByCy+2TCyS−2 BxS
Cy2 (T 2+1 )+Cy (−2BxT−2 By+2TS )+(s2+b2−c¿¿2−2BxS)¿
PC y2+QCy+R=0
Cy=−Q+√Q 2−4∗P∗R2∗P
tt 4=cos−1 (−U A /O 4 )
tt 5=tg−1( By−CyBx−Cx )
tt 6=tg−1(Cy−O 6 yCx−O6 x )

Análisis de Velocidad
Es de nuestro conocimiento que la velocidad de un punto se lo puede conocer derivando la posición. Por lo que si también se desea conocer la velocidad angular de un eslabón, consiste en derivar el ángulo sobre el cual se apoya el eslabón.
Por lo tanto se tiene que:
- Velocidad del Punto A en x:
Vax= ddt
(Ax)
- Velocidad del Punto A en y:
Vay= ddt
(Ay )
- Velocidad del Punto B en x:
Vbx= ddt
(Bx)
- Velocidad del Punto B en y:
Vby= ddt
(By)
- Velocidad del Punto C en x:
Vcx= ddt
(Zx )
- Velocidad del Punto C en y:
Vcy= ddt
(Zy)
- Velocidad Angular del Balancín b en radianes/seg
Wb1= ddt
(tt 3)
- Velocidad Angular del Eslabón c en radianes/seg
Wc 1= ddt
( tt 4 )

Análisis de Aceleración
- Aceleración del Punto A en x:
Aax= ddt
(Vax)
- Aceleración del Punto A en y:
Aay= ddt
(Vay)
- Aceleración del Punto B en x:
Abx= ddt
(Vbx)
- Aceleración del Punto B en y:
Aby= ddt
(Vby)
- Aceleración del Punto C en x:
Acx= ddt
(Vzx )
- Aceleración del Punto C en y:
Acy= ddt
(Vzy )
Códigos Matlab
%Análisis de una cadena cinemática de 6 barras a todo tiempo de posición, %velocidad y aceleración >> syms t>> w2=100;>> tt2=w2*t; %ángulo teta de la manivela[rad]>> a=1,35*25,4; %longitud de la manivela[mm]
a =
1
ans =
875
>> b=1,36*25,4; %longitud del acoplador [mm]
b =
1
ans =
900
>> d=2,75*25,4;
d =
2
ans =
1875
>> e=2,755*25,4; %distancia del origen al eje de la corredera [mm]
e =
2
ans =
18875
>> f=3,86*25,4;
f =
3
ans =
2150
>> c= 2,80*25,4;
c =
2

ans =
2000
>> tt1=pi*56,5/pi; %ángulo de inclinación del eslabón 1
tt1 =
175.9292
>> tt3=pi*213/pi;>> %Condición de Grashof>> if (b+d) > (f+a)error('El mecanismo no es de Grashof')end>> %Análisis de posición>> A=a*[cos(tt2) sin(tt2) 0];>> rO4=e*[cos(56.5*2*pi/180) sin(56.5*2*pi/180) 0];>> ArO4=A-rO4;>> mArO4=sqrt(ArO4(1,2)^2+ArO4(1,1)^2);>> UArO4=(ArO4/mArO4);>> BrO4=b*(-UArO4);>> f=sqrt(d^2+a^2-2*d*a*cos(-tt2));>> tt4=acos(-UArO4);>> B=rO4+BrO4;>> rO6rO4=f*[cos(213*2*pi/180) sin(213*2*pi/180) 0];>> rO6=rO4+rO6rO4;>> T= (rO6(1,2)-B(1,2))/ (B(1,1)-rO6(1,1));>> S=( (B(1,1))^2+(B(1,2))^2-(rO6(1,1))^2-(rO6(1,2))^2-c^2-d^2)/(2*(B(1,1)-rO6(1,1)));>> P=(T^2+1);>> Q=(-2*B(1,1)*T-2*B(1,2)+2*T*S);>> R=(S^2+b^2-c^2-2*B(1,1)*S);>> Cy=(-Q +(sqrt(Q^2-4*P*R)))/(2*P);>> Cx=(T*Cy)+S;>> C=[Cx Cy 0];>> tt5=atan((B(1,2)-C(1,2))/(B(1,1)-C(1,1)));>> tt6=atan((C(1,2)-rO6(1,2))/(C(1,1)-rO6(1,1)));>> %Análisis de velocidad>> w4=diff(tt4);>> w5=diff(tt5);>> Va=cross([0 0 w2],A);>> Vb=Va+cross([0 0 w4],BrO4);Error using cross (line 31)A and B must be same size. >> w4=[0 0 diff(tt4)];>> w5=[0 0 diff(tt5)];>> w2=[0 0 60];>> Va=cross(w2,A);>> BrO4=[BrO4(1,1) BrO4(1,2) 0];>> Vb=Va+cross(w4,BrO4);Error using cross (line 31)A and B must be same size. >> w2=[0 0 100];>> Va=cross(w2,A);
>> BrO4=[BrO4(1,1) BrO4(1,2) 0];>> Vb=Va+cross(w4,BrO4);Error using cross (line 31)A and B must be same size. >> Vb=Va+cross(w2,BrO4);>> w4=[0 0 diff(tt4)];>> Vb=Va+cross(w4,BrO4);Error using cross (line 31)A and B must be same size. >> j=diff(tt4);>> w4=[0 0 j];>> Vb=Va+cross(w2,BrO4);>> Vc=Vb+cross([0 0 w5],C);Error using cross (line 31)A and B must be same size. >> Vc=Vb+cross(w5,C); %Presentación de Resultados %Posición figure('Name','Trayectoria del Nodo A','NumberTitle','off')ezplot(A(1),A(2),[0,2]) figure('Name','Trayectoria del Nodo B','NumberTitle','off')ezplot(B(1),B(2),[0,2])figure('Name','Trayectoria del Nodo C','NumberTitle','off')ezplot(C(1),C(2),[0,2]) %Velocidad figure('Name','Velocidad x del Nodo A','NumberTitle','off')ezplot(Va(1),[0,2]); figure('Name','Velocidad y del Nodo A','NumberTitle','off')ezplot(Va(2),[0,2]); figure('Name','Velocidad del Nodo A','NumberTitle','off')ezplot(sqrt((Va(1)^2+Va(2)^2)),[0,2]) figure('Name','Velocidad x del Nodo B','NumberTitle','off')ezplot(Vb(1),[0,2]); figure('Name','Velocidad y del Nodo B','NumberTitle','off')ezplot(Vb(2),[0,2]); figure('Name','Velocidad del Nodo B','NumberTitle','off')ezplot(sqrt((Vb(1)^2+Vb(2)^2)),[0,2]) figure('Name','Velocidad x del Nodo C','NumberTitle','off')ezplot(Vc(1),[0,2]); figure('Name','Velocidad y del Nodo C','NumberTitle','off')ezplot(Vc(2),[0,2]); figure('Name','Velocidad del Nodo C','NumberTitle','off')ezplot(sqrt((Vc(1)^2+Vc(2)^2)),[0,2])

Análisis y Resultados
Resultados de las Gráficas de SolidWorks:
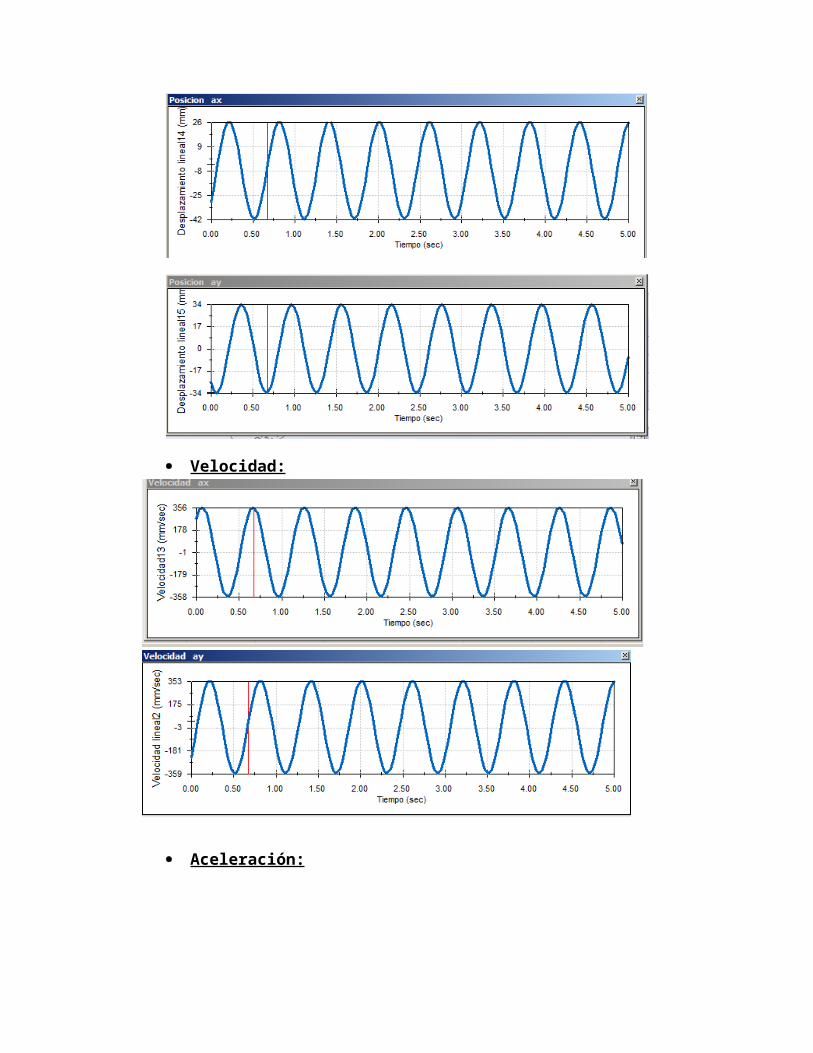
Nodo “A” Posición:
Velocidad:
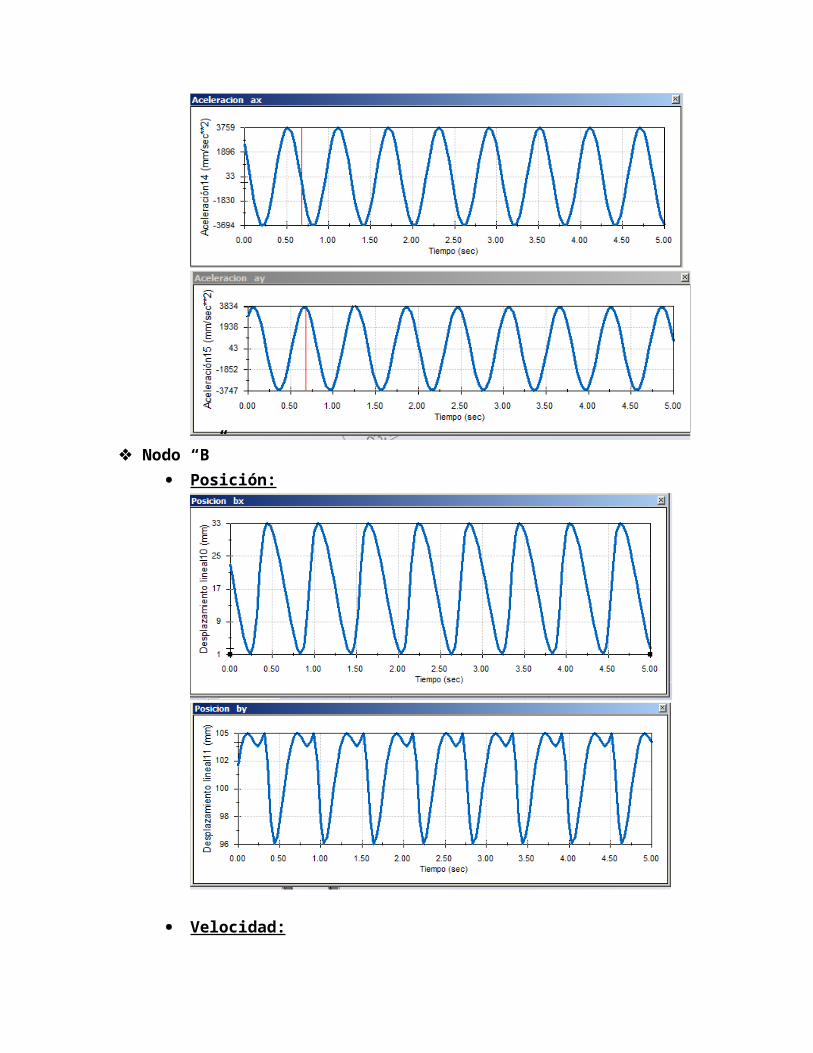
Aceleración:
Nodo “B” Posición:
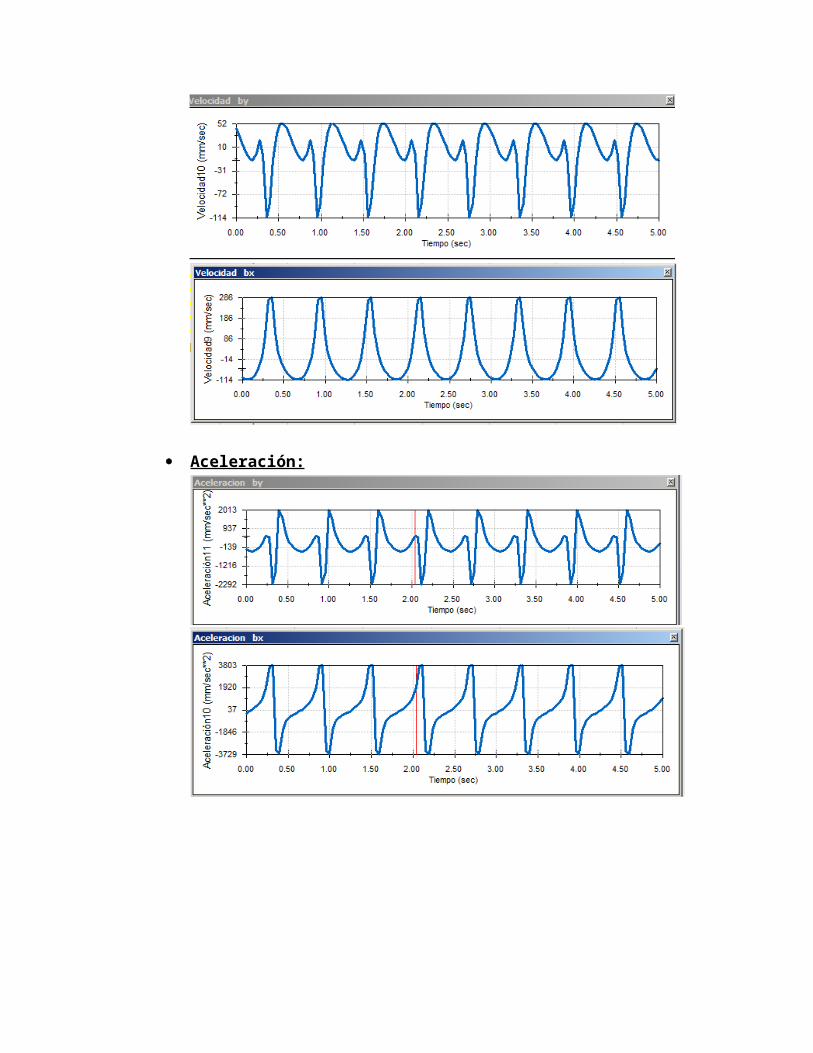
Velocidad:
Aceleración:
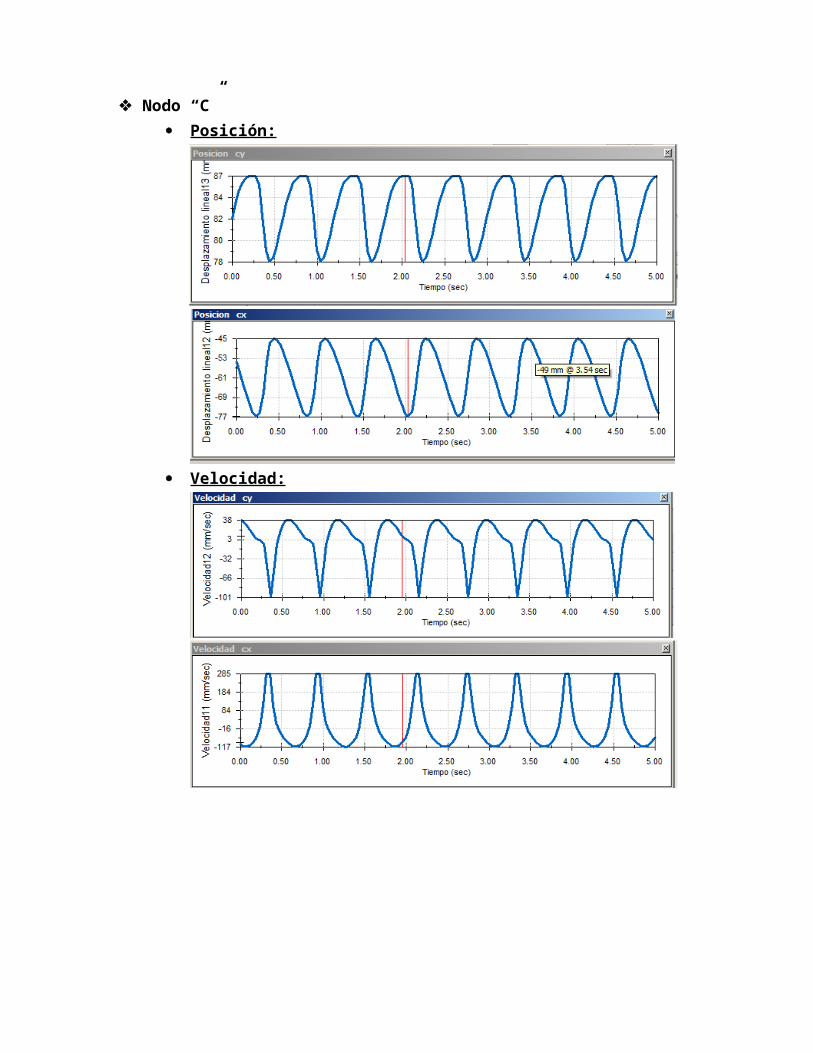
Nodo “C”
Posición:
Velocidad:
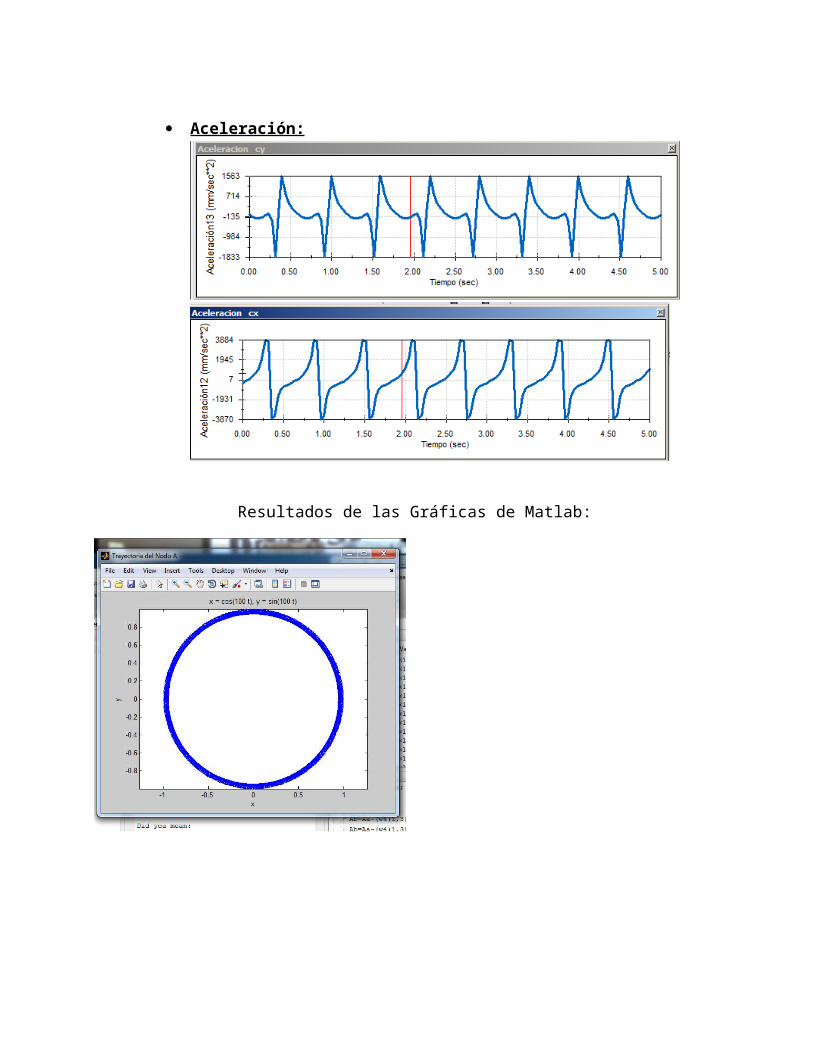
Aceleración:
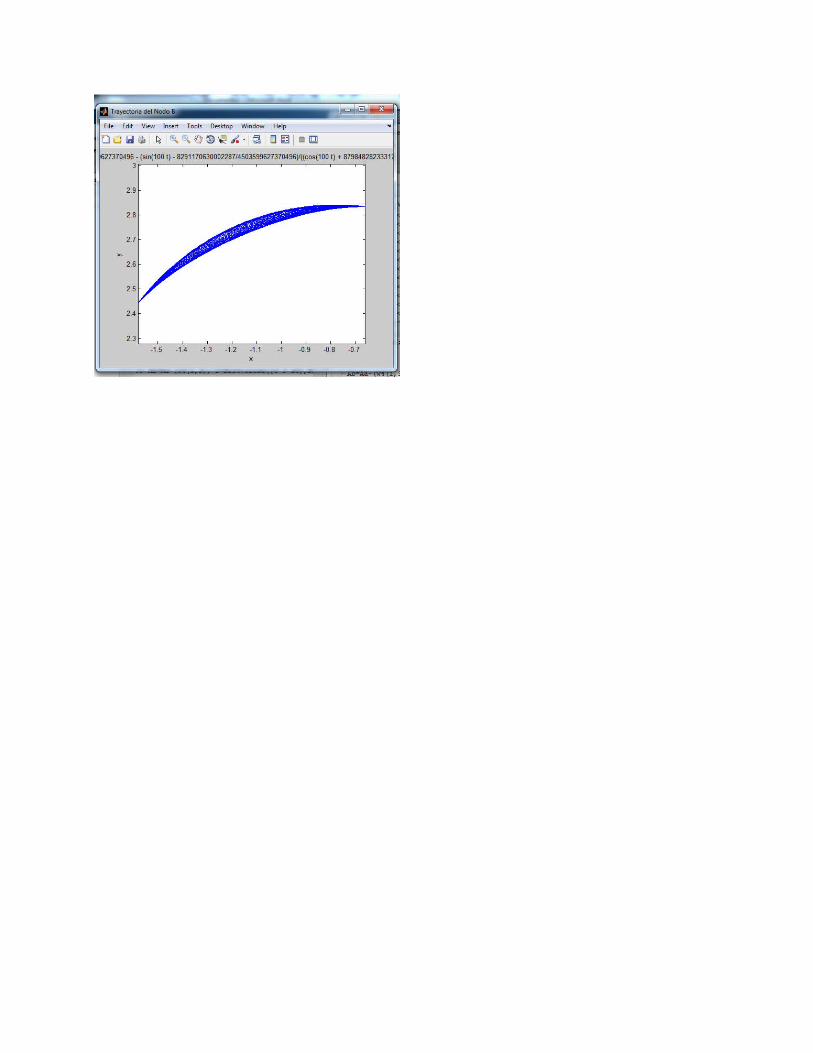
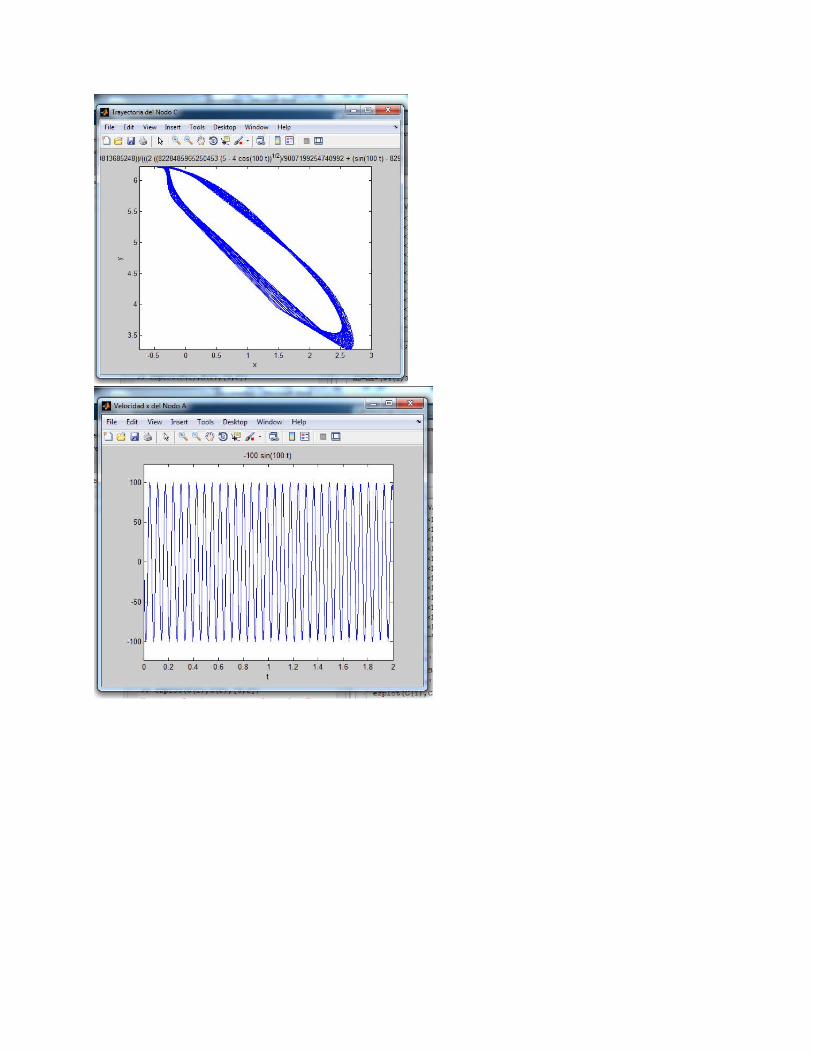
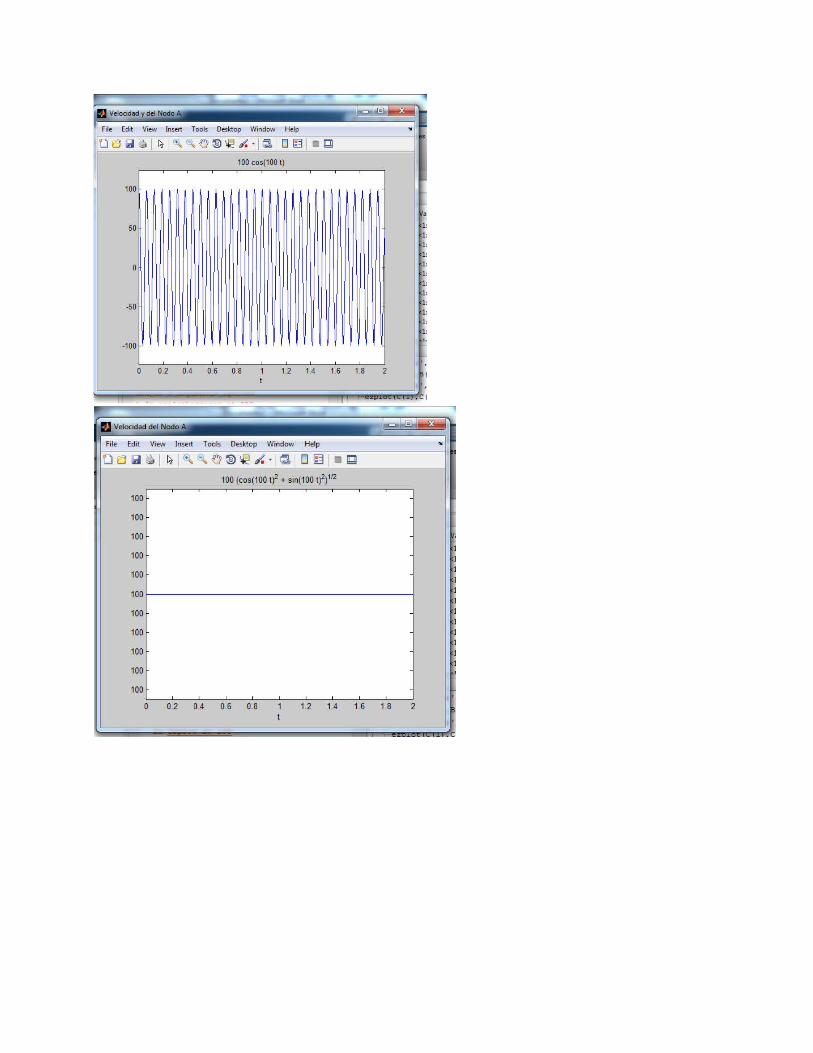
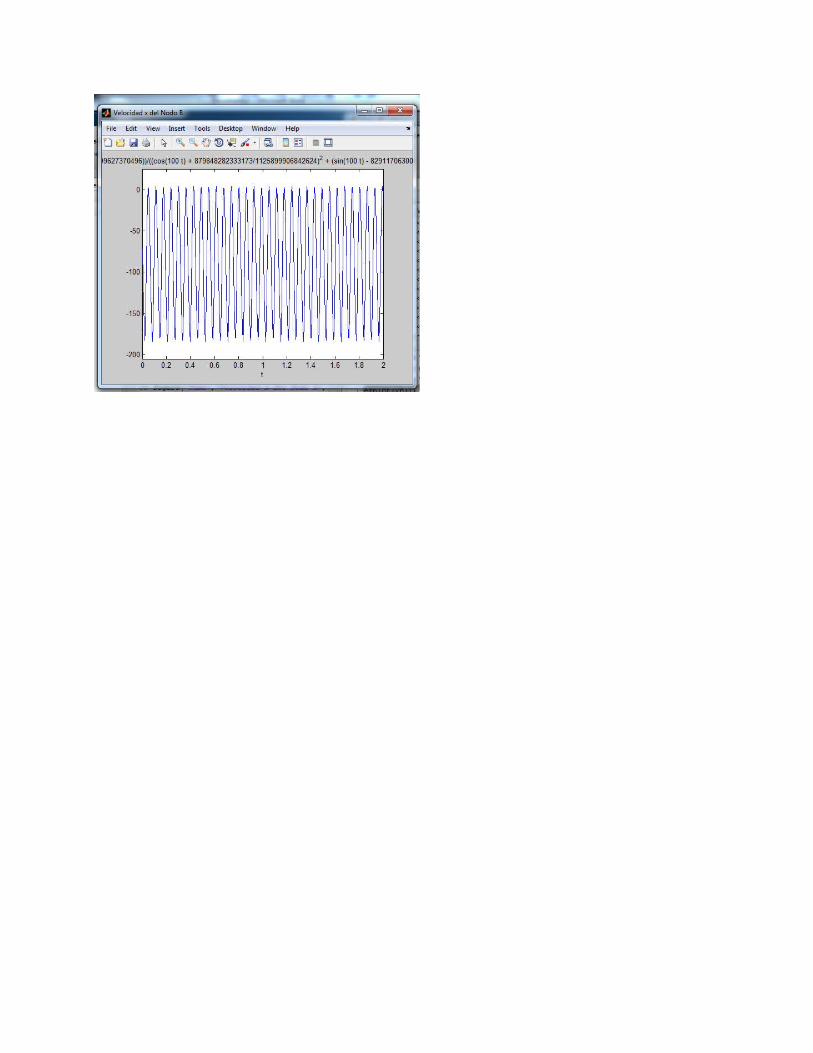
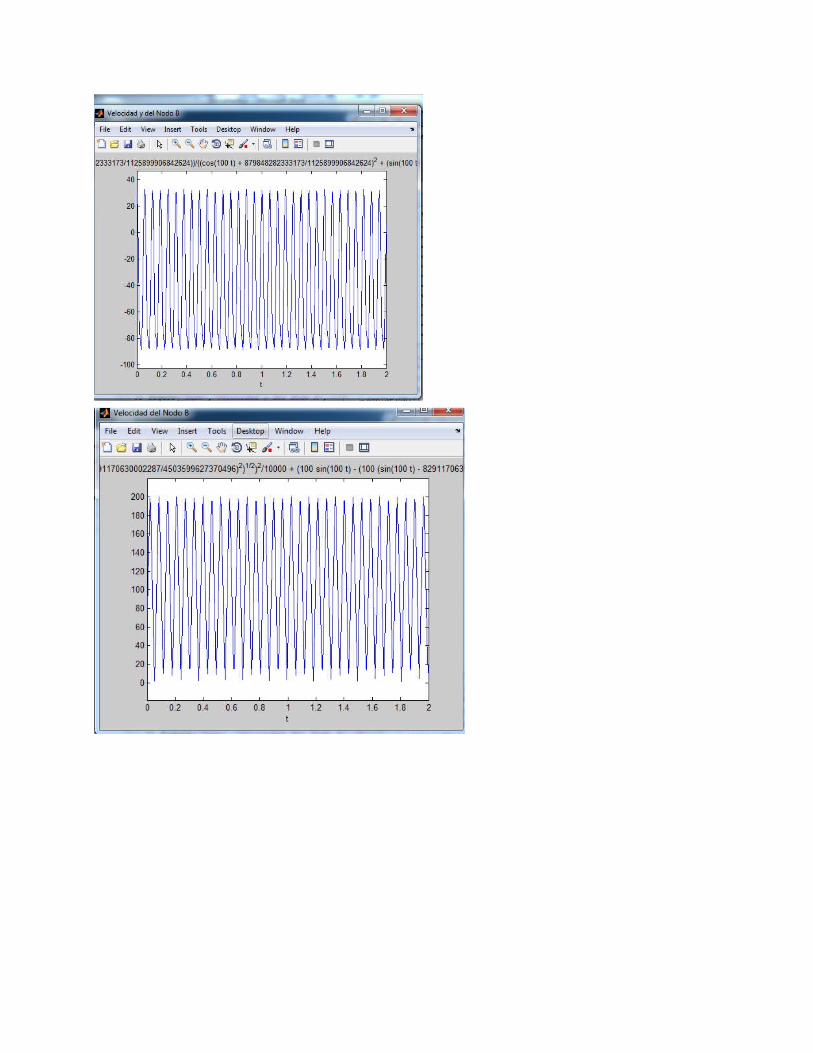
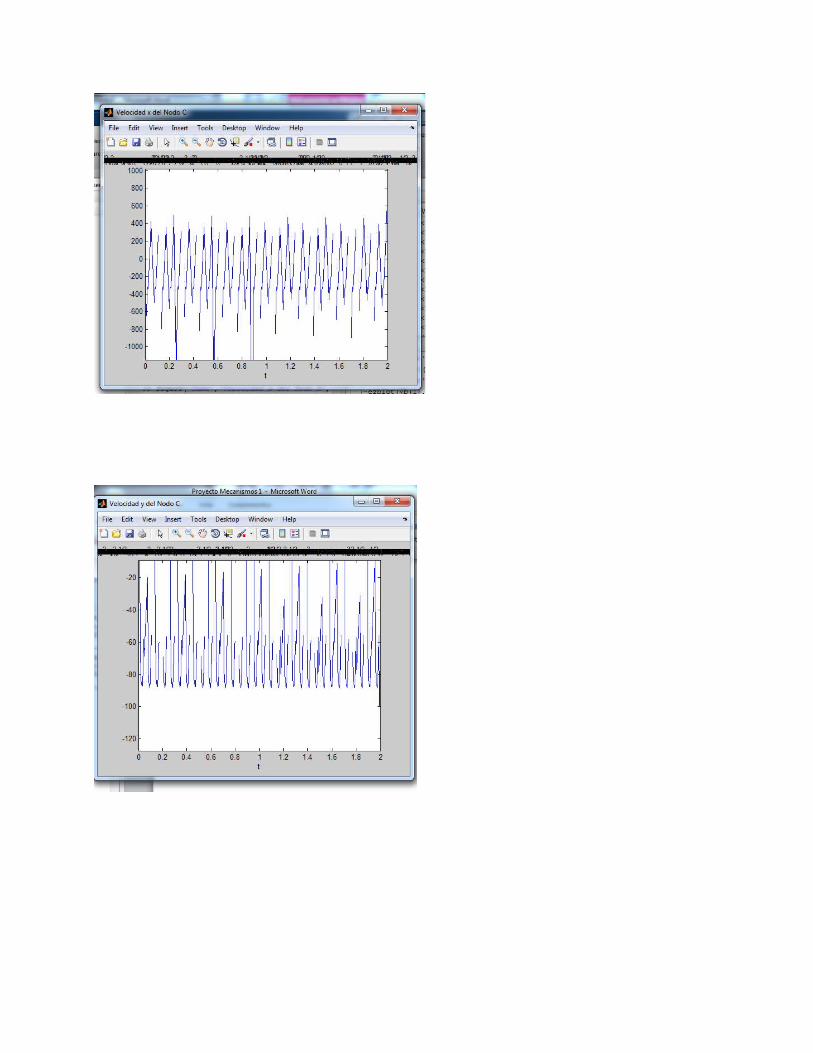
Resultados de las Gráficas de Matlab:
Conclusiones :
Las gráficas visualizadas en Solid Works son similares a las resultantes en Matlab dado que el análisis matemático y dinámico utilizado está calculado en función de las medidas de los eslabones, y ángulos variables.
Existe un desfase de alrededor de 0.5 entre las gráficas de Solid Works y Matlab pero a pesar de eso describen la misma trayectoria.
La corredera tienen un retorno rápido el cual se ve en la gráfica de velocidad x del punto A.
La simulación del funcionamiento del mecanismo nos permite comprobar que los cálculos matemáticos y sus resultantes graficas aseguren el mejor rendimiento del mismo.
El mecanismo de seis barras de Watt es eficiente al momento de transformar un movimiento circular en uno lineal.
Al momento de realizar la simulación virtual del mecanismo, pude constatar que se presentaba una posición de agarrotamiento, y no cumplía la condición de Grashof, por lo que fue necesario, para un correcto análisis de posición modificar las constantes del mecanismo original para hacerlas cumplir con la condición de Grashof.
Los datos obtenidos en Matlab, en comparación con los obtenidos en Solidworks, son más exactos y representan un mecanismo ideal en el cual las posiciones de los nodos son exactas considerando a los eslabones como vectores posición y a los nodos como puntos en el espacio.
Un análisis de posición en la ubicación correcta del mecanismo lleva a un resultado verdadero y por consiguiente un acertado análisis de velocidad y aceleración.
Al no coincidir las gráficas de velocidad y aceleración generadas por Matlab y Solidworks, un error en el análisis presentado en Matlab existe, al ser las gráficas de Solidworks la representación más real posible del movimiento, ya que simula al mecanismo ensamblado.
Debido a la geometría del mecanismo, el análisis de posición presente en el código, puede presentar errores al determinar distancias variables como constantes, que a su vez influyen en el análisis de velocidad y aceleración presentando gráficas incorrectas de éstos análisis.
Mediante el diseño del mecanismo con el programa SolidWorks nos permitió conocer el verdadero comportamiento del mismo en condiciones reales con sus respectivas características (trayectorias, posiciones, velocidades, aceleraciones).
Lo que nos interesa en el mecanismo en el análisis cinemáticos son las magnitudes de estos parámetros, es decir que nos interesa conocer a tal instante de tiempo que tan rápido se mueve el balancín o la corredera, para poder darle una aplicación al mecanismo.
Este trabajo se ha limitado al análisis cinemático más no cinético de un sistema mecánico o cadena cinemática, para dar una referencia del comportamiento de este tipo de sistema. Este análisis es una consideración válida en la fase inicial de diseño, sin embargo posteriormente se deben analizar otro tipo de parámetros cinéticos como las fuerzas involucradas en el mecanismo, los esfuerzos, y para convertirlos en sistemas físicos reales los materiales, para eso nos sirve la ciencia de los materiales en esta carrera.
Todo ha sido en función a la dinámica, el análisis de movimiento del mecanismo se ha calculado por las relaciones de geometría y las leyes de la dinámica para determinar velocidades y aceleraciones. Nos parece que este proyecto ha servido al estudiante para poder dominar la dinámica y establecer las relaciones existentes entre posición, velocidad, y aceleración mediante métodos gráficos; y darse cuenta que la velocidad es la derivada de la posición, y la aceleración derivada de la velocidad en función del tiempo.
Tal vez si es que existió alguna mínima diferencia entre el análisis realizado por SolidWorks y el de Matlab debe ser porque el análisis de Solid es más exhaustivo y topa otras consideraciones como la inercia, la fricción, etc.
Recomendaciones
Tener mucho cuidado al momento de realizar todos los cálculos matemáticos ya que un pequeño error puede variar enormemente los resultados.
Asegurarse de utilizar las mismas unidades y límites al momento de utilizar los programas necesarios para el desarrollo del proyecto.
Utilizar el mecanismo bajo los mismos parámetros de simulación.
Para tener una idea mucho más clara del mecanismo con el cual deseamos trabajar, es necesario realizar tanto el análisis analítico como el modelo de simulación y comparar los resultados obtenidos.
- Es indispensable tener un correcto análisis de posición, velocidad y aceleración para que los
resultados que obtengamos analíticamente en Matlab coincidan con la simulación gráfica de SolidWorks.
- Debemos trabajar con las mismas medidas y los mismos sistemas de unidades en Matlab y en
SolidWorks. Se debe ver con mayor profundidad el análisis de velocidad y aceleración tanto en magnitud y de
forma angular para así notar el cambio y diferencia en estos aspectos, por lo que sería más recomendable que la forma de manejo de los programas y su explicación sean realizado con mayor objetividad.
Una recomendación para este tipo de proyectos es primero realizar un análisis de posición adecuado y lo más simplificado posible verificado las condiciones de geometría como la condición de Grashof, y los grados de libertad que posee el mecanismo estudiado. En esta clase de trabajo fue fundamental escoger un mecanismo de 1 Grado de Libertad para ser analizado, porque todo estaría en función de un solo actuador, para mecanismos de mayor grado de libertad se requiere de una análisis más complejo con más de un actuador como movimiento de entrada.
Bibliografía y Referencias
DISEÑO DE MAQUINARIA, Norton, Robert L., McGraw-Hill/Interamericana Editores, S.A. de C.V., México, D.F., Tercera Edición, 2005.
TEORÍA DE MÁQUINAS Y MECANISMOS, Shigley, Joseph E., McGraw-Hill/Interamericana Editores, S.A. de C.V., México, D.F., Tercera Edición, 1998.