movimiento de un oscilador armónico · pdf filetrabajo consta de una...
TRANSCRIPT

1
MOVIMIENTO DE UN OSCILADOR ARMÓNICO AMORTIGUADO
Alejo Hernández - Alihuén García - Franco Poggio - Renzo Espósito - Samuel Céspedes
Turno Tarde - Curso de Física Experimental 1 (2009) - Departamento de Física, Facultad de Ciencias Exactas, Universidad Nacional de La Plata
Mediante el siguiente proyecto se estudia el movimiento de un oscilador armónico amortiguado, en particular, en interacción con una fuerza de rozamiento seca. El trabajo consta de una introducción, una descripción del sistema utilizado, un desarrollo y una conclusión. La introducción prepara al lector en la teoría del movimiento armónico simple y amortiguado. La descripción del sistema muestra los elementos utilizados en el laboratorio y el sistema estudiado. El desarrollo presenta el marco teórico empleado, obtiene resultados a partir del mismo y compara con las mediciones del laboratorio, tratando de explicar las diferencias encontradas. La conclusión nota la diferencia encontrada entre mediciones dinámicas y estáticas, y entre el movimiento amortiguado por una fuerza de rozamiento constante contra uno por una fuerza dependiente de la velocidad. Finalmente, dos anexos completan la presentación. En uno se informa el procedimiento para calcular la constante del resorte y en el otro el método empleado para calcular el error de cada parámetro obtenido.
Introducción El movimiento de un resorte es algo muy común dentro del estudio de física general. Como hemos visto en el estudio del movimiento armónico simple, existe un resorte “ideal”, el cual carece de roce alguno y al darle una amplitud inicial debería seguir oscilando hasta que una nueva fuerza externa interfiera, haciendo que este pierda energía, y llevándolo nuevamente a un punto de reposo. Ahora bien, como sabemos, la ecuación que describe la posición en función del tiempo de este oscilador “ideal”, está dada por
(1) donde x es la distancia al punto de equilibrio, A es la amplitud máxima alcanzada inicialmente, t es el tiempo transcurrido desde que se suelta la masa hasta que llega al punto x, es la frecuencia de oscilación dada por , y la fase, que se obtiene de integrar la ecuación diferencial
(2)
donde es la constante de elasticidad del resorte, y m la masa suspendida del resorte. Ahora bien, para ser un poco más realistas, imaginaremos que tenemos una masa suspendida del extremo de un resorte, la cual sumergimos en un medio viscoso. De esta manera, el sistema masa resorte deja de ser ideal para adecuarse más a la realidad, por lo que tendremos una nueva fuerza externa que se opondrá a la velocidad de la masa. Llamaremos a esta fuerza, fuerza de amortiguamiento viscosa, y la expresaremos de la forma
2
(3) donde es una constante que depende del medio y de la forma del cuerpo, y v es la velocidad del cuerpo. Entonces, asociando (2) y (3), obtendremos la ecuación diferencial
(4)
que al resolverla, resulta en la ecuación exponencial decreciente de x en función de t
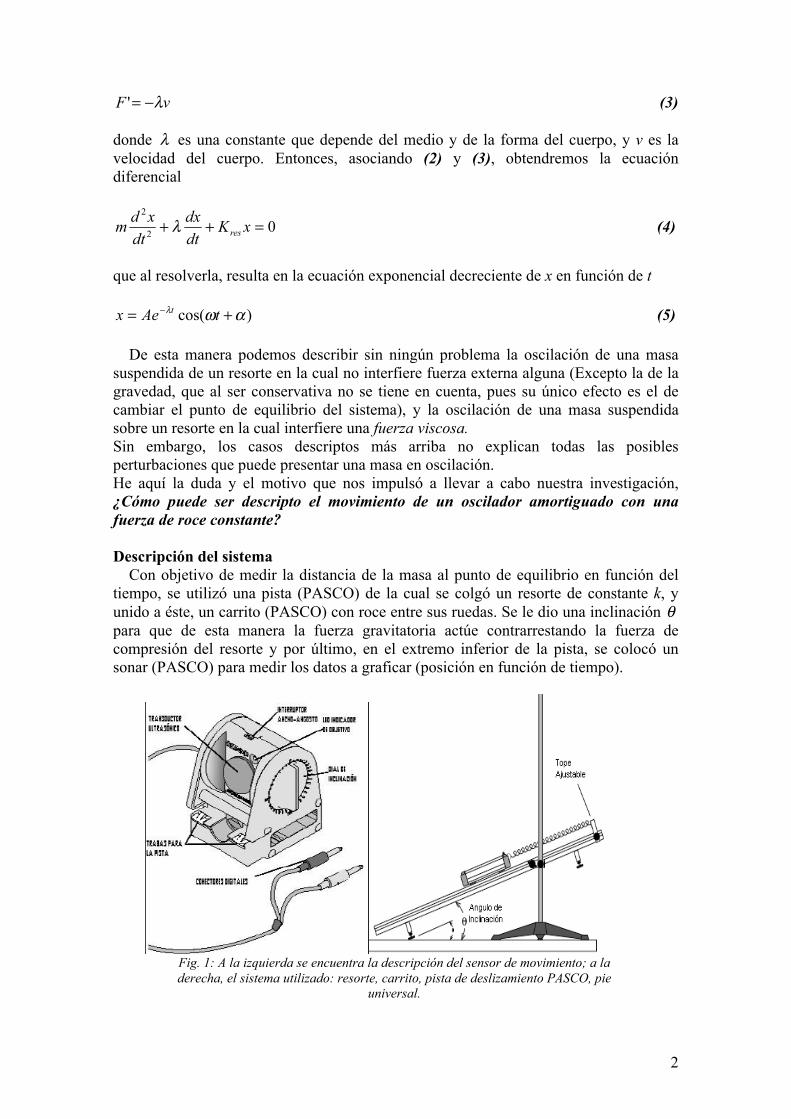
(5) De esta manera podemos describir sin ningún problema la oscilación de una masa suspendida de un resorte en la cual no interfiere fuerza externa alguna (Excepto la de la gravedad, que al ser conservativa no se tiene en cuenta, pues su único efecto es el de cambiar el punto de equilibrio del sistema), y la oscilación de una masa suspendida sobre un resorte en la cual interfiere una fuerza viscosa. Sin embargo, los casos descriptos más arriba no explican todas las posibles perturbaciones que puede presentar una masa en oscilación. He aquí la duda y el motivo que nos impulsó a llevar a cabo nuestra investigación, ¿Cómo puede ser descripto el movimiento de un oscilador amortiguado con una fuerza de roce constante? Descripción del sistema Con objetivo de medir la distancia de la masa al punto de equilibrio en función del tiempo, se utilizó una pista (PASCO) de la cual se colgó un resorte de constante k, y unido a éste, un carrito (PASCO) con roce entre sus ruedas. Se le dio una inclinación para que de esta manera la fuerza gravitatoria actúe contrarrestando la fuerza de compresión del resorte y por último, en el extremo inferior de la pista, se colocó un sonar (PASCO) para medir los datos a graficar (posición en función de tiempo).
Fig. 1: A la izquierda se encuentra la descripción del sensor de movimiento; a la derecha, el sistema utilizado: resorte, carrito, pista de deslizamiento PASCO, pie
universal.
3
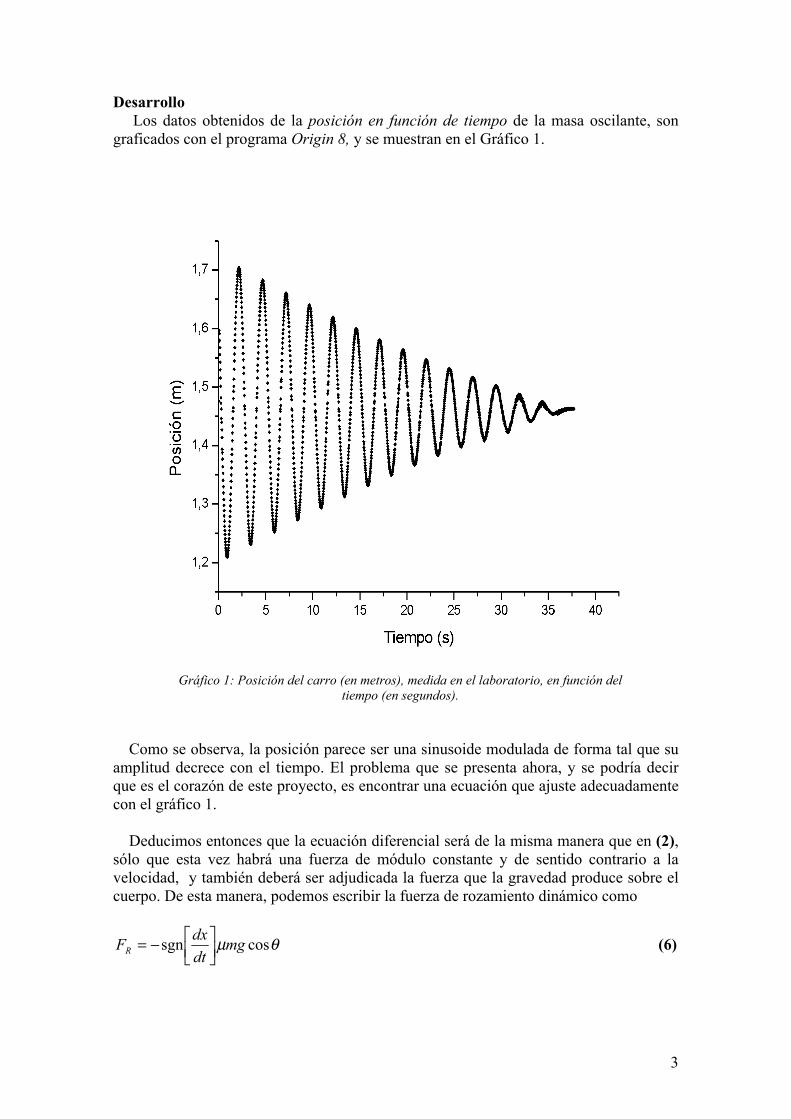
Desarrollo Los datos obtenidos de la posición en función de tiempo de la masa oscilante, son graficados con el programa Origin 8, y se muestran en el Gráfico 1.
Gráfico 1: Posición del carro (en metros), medida en el laboratorio, en función del tiempo (en segundos).
Como se observa, la posición parece ser una sinusoide modulada de forma tal que su amplitud decrece con el tiempo. El problema que se presenta ahora, y se podría decir que es el corazón de este proyecto, es encontrar una ecuación que ajuste adecuadamente con el gráfico 1. Deducimos entonces que la ecuación diferencial será de la misma manera que en (2), sólo que esta vez habrá una fuerza de módulo constante y de sentido contrario a la velocidad, y también deberá ser adjudicada la fuerza que la gravedad produce sobre el cuerpo. De esta manera, podemos escribir la fuerza de rozamiento dinámico como
(6)

4
(donde es el coeficiente de roce dinámico de los rodamientos del carro, g es el módulo de la gravedad, que según medidas hechas por el Observatorio de La plata es de
9,798m s , y quiere decir que el sentido será siempre opuesto al de la
velocidad). Utilizando la ecuación (2), ahora podemos expresar la sumatoria de fuerzas, y por lo tanto la ecuación diferencial, como:
cuando el móvil asciende (7)
cuando el móvil desciende (8)
cuya integración representa el problema mayor de esta investigación. Para ello se proponen las ecuaciones desde [1]
(9)
cuando el móvil desciende en el primer ciclo,
(10)
cuando el móvil asciende en el primer ciclo. Esto puede demostrarse haciendo ω2 = Kres/m, y derivando x dos veces con respecto al tiempo y reemplazando el resultado obtenido en las ecuaciones (7) y (8) correspondientes. Ahora, si se continúa este procedimiento de resolución de las diferenciales por tramos, se puede llegar a la siguiente ecuación que describe los máximos y mínimos de las oscilaciones del sistema
(11)
donde n es el número de semiciclos transcurridos y es la distancia del máximo o mínimo al punto de equilibrio (máximo cuando n es par y mínimo cuando es impar). De esta forma, si reemplazamos n por 0, tenemos que es igual a la amplitud inicial A. Luego, para verificar que nuestro sistema tiene un decaimiento lineal de la amplitud con el tiempo, tomamos las amplitudes máximas, las graficamos con el Origin y realizamos un ajuste lineal.

5
Gráfico 2: en negro, amplitudes máximas de las oscilaciones medidas (en metros) en
función de tiempo (segundos), en rojo, ajuste de decaimiento lineal de la forma x=A+Bt. En el cuadro se muestran los parámetros arrojados por el Origin.
Entonces, utilizando la ecuación (11), y tomando n = (0,2,4…) se puede ver que la amplitud decrece en forma lineal con n, esto es
(12) sabiendo que el tiempo transcurrido hasta que el carrito se detiene en el punto Xn es
(13) se puede reemplazar en (12) para obtener
(14)
Ahora bien, para poder comparar la ecuación (14) con el ajuste lineal realizado de las amplitudes máximas, es necesario conocer el coeficiente de roce dinámico. Para ello, se emplea la ecuación (11) con n = 2 utilizando el X2 de las mediciones experimentales, obteniéndose
6
(15) y de aquí se despeja el coeficiente de roce como
(16) el resultado obtenido fue el siguiente
(17) Como podemos ver, el no fue medido, sino calculado usando la ecuación (11) con nuestros valores experimentales. Otra manera en la que éste parámetro podría ser estimado es aplicando el Teorema de Conservación de la Energia a nuestro sistema. Sin embargo, a los fines de no resultar reiterativos, dejamos al lector interesado dicho cálculo. Volviendo a nuestro razonamiento, una vez conocido el coeficiente de roce, resulta que
(18) Por comparación con la pendiente de las amplitudes máximas obtenida del ajuste lineal, podemos notar que con nuestro modelo y dentro del error experimental, estamos haciendo una estimación bastante buena de la pendiente de decaimiento, como puede verse en la siguiente tabla comparativa
Valor Error Pendiente Teórica -0.0099 0.0025 Pendiente Ajuste -0.0072 0.0002
Tabla 1: Comparación entre la pendiente de decaimiento de las amplitudes máximas teórica con la
obtenida a partir del ajuste lineal de las amplitudes máximas experimentales. Teniendo este hecho en cuenta, se decide hacer un ajuste del movimiento oscilatorio de nuestro sistema empleando la ecuación
(19)

7
El gráfico y los resultados de los parámetros de ajuste pueden verse a continuación:
Gráfico 3: en negro, medición de la posición (en metros) en función del tiempo (en
segundos), en rojo, ajuste realizado con la ecuación (19).
Parámetro Valor Error Comentarios A 0.27 m 0.001 m Se mantuvo fijo B -0.00808 2E-5 ω 2.5285 4E-4 ϕ 0.7546 0.004 Pe 1.462 m 0.001 m Se mantuvo fijo
Tabla 2: Parámetros de ajuste de la ecuación (19).
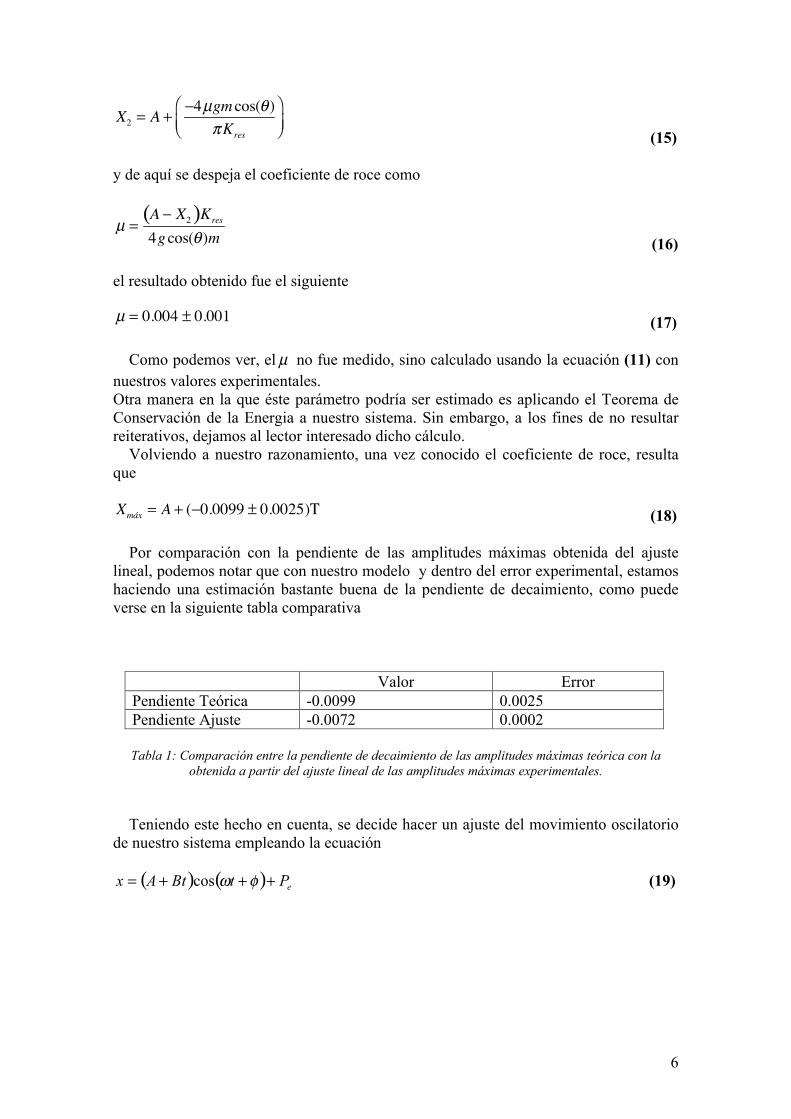
El valor del R informado por el Origin es de 0.98625. Notamos que el ajuste describe correctamente el movimiento oscilatorio de nuestro sistema, perdiéndose precisión en las últimas 2 oscilaciones. Creemos que este efecto esta relacionado con el valor de B obtenido en este ajuste, ya que dicho valor, al ser en módulo un poco mayor que el valor experimental, hace que la envolvente alcance el valor del punto de equilibrio un tiempo antes de que lo haga el móvil y esto se traduce en una pérdida de precisión del ajuste en el último tramo. Para profundizar un poco más, analicemos el comportamiento de la función ajustada. En el gráfico 4, se muestra la ecuación (19) con las rectas envolventes superpuestas y se ha extendido el tiempo durante 10 segundos más a partir del momento en que el carrito se detuvo. Puede verse que, pasada la intersección con el punto de equilibrio de las envolventes, se produce un rebote en la función teórica y es este efecto el que, a nuestro entender, dificulta el ajuste del Origin en las últimas dos oscilaciones.
8
Gráfico 4:en azul, gráfica de la función de la ecuación (19); en rosa, recta (A+Bt)+Pe; en amarillo, recta (A-Bt)+Pe.
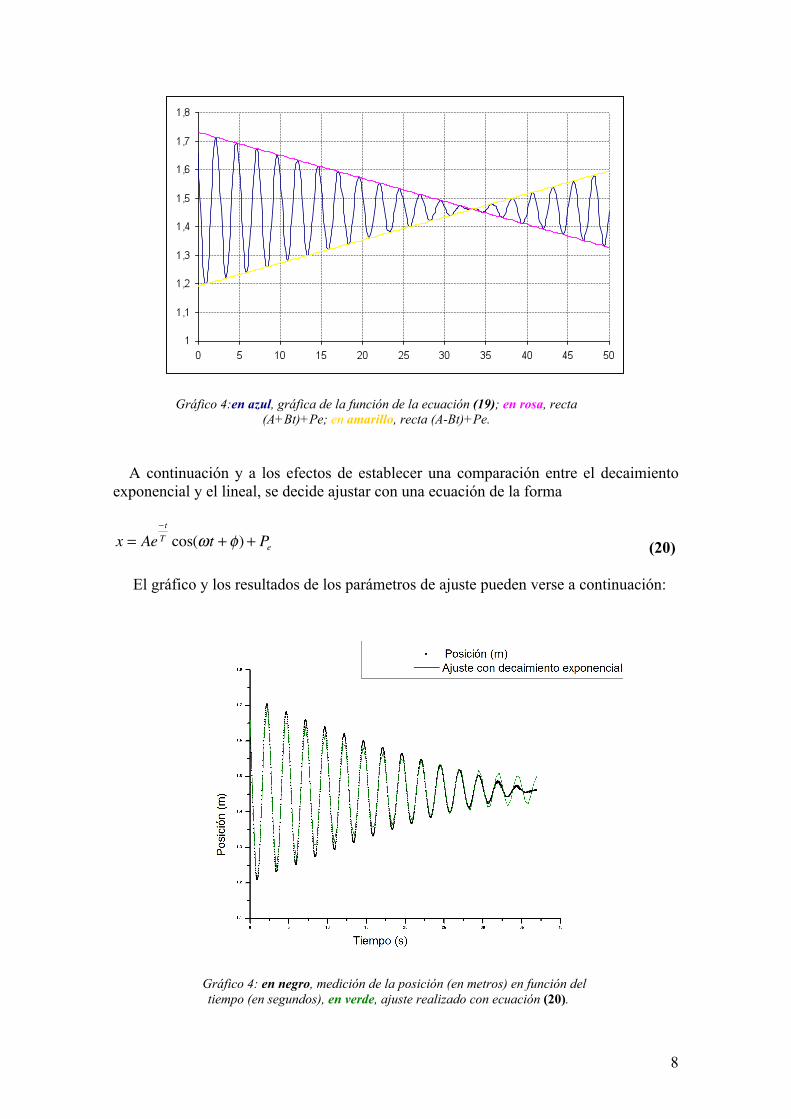
A continuación y a los efectos de establecer una comparación entre el decaimiento exponencial y el lineal, se decide ajustar con una ecuación de la forma
(20) El gráfico y los resultados de los parámetros de ajuste pueden verse a continuación:
Gráfico 4: en negro, medición de la posición (en metros) en función del tiempo (en segundos), en verde, ajuste realizado con ecuación (20).

9
Parámetro Valor Error Comentarios A 0.27 m 0.001 m Se mantuvo fijo T 18.7 0.1 ω 2.5286 4E-4 ϕ 0.756 0.005 Pe 1.462 m 0.001 m Se mantuvo fijo
Tabla 3: Parámetros de ajuste de la ecuación (20).
Como podemos ver, el ajuste es muy bueno también, y se obtiene un R de 0,983. Ahora bien, si prestamos cuidadosa atención al decaimiento de los máximos en el Gráfico 2, se observa que la mayor parte de los puntos experimentales se encuentran por debajo de nuestra curva de ajuste lineal, presentando un comportamiento que se asemeja bastante a un decaimiento exponencial. Esto nos alienta a pensar que la fuerza de rozamiento en nuestro sistema no es totalmente independiente de la velocidad, como nosotros creíamos, sino que ésta presenta una ligera dependencia con v. Si bien se podria explicar esta dependencia con v en términos de la interacción del carrito con el aire (roce viscoso), nosotros nos inclinamos a pensar que es la fuerza de roce en el rodamiento la que gobierna dicha dependencia y estimamos que dicha fuerza podría exhibir un comportamiento análogo al roce viscoso. Finalmente analizamos el comportamiento del sistema para el último medio ciclo del movimiento. Como puede observarse en el Gráfico 1, el sistema presenta un mayor amortiguamiento en este tramo que en el resto de su recorrido, ya que la velocidad con que retorna al punto de equilibrio es marcadamente más baja. Para realizar este análisis introducimos el concepto de amplitud crítica. Se entiende por amplitud crítica, la amplitud mínima que deberá dársele al resorte para que éste logre vencer la fuerza de rozamiento estática y pueda oscilar. Esto nos hace pensar que el lugar donde el carro se detendrá después de oscilar, no debe de ser siempre el mismo, lo que nos lleva a afirmar que su punto de detenimiento se encontrará dentro del intervalo dado por la amplitud crítica. En una situación de reposo, la fuerza del resorte se encuentra equilibrada por la fuerza del rozamiento estático Entonces, la amplitud crítica resulta
(21)
Para nuestro sistema la amplitud crítica teórica calculado con el dinámico (lo que no es correcto ya que siempre es menor) es
(22)

10
y la amplitud en módulo a la que comienza la última media oscilación es
(23) Por lo tanto, la paridad entre estos dos valores, sumado a que el valor de Ac resulta menor que el real por estar calculado con el µ dinámico, nos lleva a creer que efectivamente el sistema cambia su amortiguamiento bruscamente en este último tramo, por haber entrado en la zona de amplitudes críticas, y no puede hacer otra cosa más que cesar su movimiento como se observa experimentalmente. Además, esto hará que el carro no pare siempre exactamente en el punto de equilibrio medido con anterioridad, sino en un punto dentro del intervalo dado por la amplitud crítica. El problema que se nos presenta en nuestro sistema, es que carecemos del módulo del coeficiente de rozamiento estático, por lo que los cálculos de la amplitud crítica fueron llevados a cabo con el coeficiente de rozamiento dinámico, cuando no tendría que ser así. Calculándolo con el estático tendría que darnos una amplitud crítica mayor a la enunciada. Conclusiones De los datos obtenidos en este trabajo, creemos que es factible, para un movimiento oscilatorio amortiguado por una fuerza de roce constante, la descripción del decaimiento de sus amplitudes como una función lineal del tiempo. De esta manera se pudo dar una descripción adecuada del sistema. Sin embargo, pensamos que es necesaria una corrección del sistema empleado en el laboratorio. Dicha corrección debería en principio utilizar elementos en los cuales el rozamiento sea producido entre superficies, sin uso de rodamientos, y también tomar en cuenta la diferencia entre el coeficiente de rozamiento estático y dinámico. Finalmente se logró explicar en forma satisfactoria el comportamiento del sistema en el último medio ciclo en términos de la amplitud crítica. Referencias bibliográficas
[1]- C. Barratt and George L. Strobel – Sliding Friction and the Harmonic Oscillator – American Journal of Physics – 49, pp. 500-501 (1981) [2]- Richard Lapidus – Motion of a Harmonic Oscillator with Sliding Friction – American Journal of Physics – 38, pp. 1360-1361 (1970) [3]- M. I. Molina – Exponential versus Lineal Amplitud Decay in Damped Oscillators.