motor mtr-dci - festo...el grupo motor mtr-dci es un servomotor avanzado que incorpora un motor dc,...
TRANSCRIPT
Descripción
MTR-DCI-...IO
Descripción539617es 1209d[763198]
MotorMTR-DCI

Adobe®, Reader®, CANopen® y CiA® son las marcasregistradas de los propietarios correspondientes endeterminados países.

Contenido e instrucciones generales
IFesto P.BE-MTR-DCI-IO-ES es 1209d
Original de. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Edición es 1209d. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Denominación P.BE-MTR-DCI-IO-ES. . . . . . . . . . . . . . . . . . .
Nº de artículo 539617. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
© (Festo AG & Co. KG, D-73726 Esslingen, Alemania, 2012)Internet: http://www.festo.comE-Mail: [email protected]
Sin nuestra expresa autorización, queda terminantementeprohibida la reproducción total o parciel de este documento,así como su uso indebido y/o exhibición o comunicación aterceros. De los infractores se exigirá el correspondienteresarcimiento de daños y perjuicios. Quedan reservadostodos los derechos inherentes, en especial los de patentes,de modelos registrados y estéticos.

Contenido e instrucciones generales
II Festo P.BE-MTR-DCI-IO-ES es 1209d

Contenido e instrucciones generales
IIIFesto P.BE-MTR-DCI-IO-ES es 1209d
Contenido
Uso al que se destina VI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Instrucciones de seguridad VII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Grupo al que se destina VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Servicio VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Dotación del suministro VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Instrucciones importantes para el usuario IX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Manuales sobre el grupo motor MTR-DCI XI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Información sobre la versión XII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Términos y abreviaciones específicos del producto XIII. . . . . . . . . . . . . . . . . . . . . . . . . . .
1. Resumen del sistema 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Posicionamiento con actuadores eléctricos 1-3. . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Componentes 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Funciones de control y regulación 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Seguridad funcional 1-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Sistema de referencia de medida 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Puntos de base y margen de trabajo 1-10. . . . . . . . . . . . . . . . . . . . . . . .
1.5.2 Signos y sentidos 1-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Recorrido de referencia 1-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Montaje 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Instrucciones generales 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Dimensiones del grupo motor 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Montaje de ejes eléctricos 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Instalación 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Resumen de la instalación 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Conexión a tierra 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Alimentación 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Interface serie 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Entrada para el interruptor de referencia externa 3-12. . . . . . . . . . . . . . . . . . . . .
3.6 Conexión del control de nivel superior 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contenido e instrucciones generales
IV Festo P.BE-MTR-DCI-IO-ES es 1209d
4. Panel de control (MTR-DCI-...-H2IO) 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Composición y función del panel de control 4-4. . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 El sistema de menú 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Acceso al menú principal 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Menú [Diagnostic] 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.3 Menú [Settings] 4-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.4 Menu [Positioning] 4-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.5 Orden de menú [HMI control] 4-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5. Puesta a punto 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Procedimiento para la puesta a punto 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Puesta a punto con el panel de control (sólo MTR-DCI-...-H2...) 5-6. . . . . . . . . .
5.2.1 Selección del tipo de eje 5-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.2 Ajuste de los parámetros del recorrido de referencia 5-9. . . . . . . . . . .
5.2.3 Programación (por Teach) del punto cero del eje yde las posiciones finales por software 5-13. . . . . . . . . . . . . . . . . . . . . . .
5.2.4 Posicionamiento con registros de posicionado 5-15. . . . . . . . . . . . . . . .
5.2.5 Programación (por Teach) de los registros de posición 5-16. . . . . . . . .
5.2.6 Ciclo de prueba 5-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Puesta a punto con FCT 5-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Instalación del FCT 5-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Procedimiento para la puesta a punto conel Festo Configuration Tool 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Comunicación con controlador de nivel superior 5-22. . . . . . . . . . . . . . . . . . . . . .
5.4.1 Prueba de funcionamiento de las I/O 5-22. . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Descripción de las I/Os 5-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3 Descripción de la función (diagrama de pulsos-tiempo) 5-26. . . . . . . .
6. Funcionamiento, mantenimiento y diagnosis 6-1. . . . . . . . . . . . . . . . . . . . . . . .
6.1 Instrucciones importantes para el usuario 6-3. . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Diagnosis e indicación de errores 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Posibilidades generales de diagnosis 6-6. . . . . . . . . . . . . . . . . . . . . . .
6.2.2 Indicadores de estado LED 6-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 Mensajes de fallo en el display (sólo tipo MTR-DCI-...-H2) 6-9. . . . . . .
Contenido e instrucciones generales
VFesto P.BE-MTR-DCI-IO-ES es 1209d
A. Apéndice técnico A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Accesorios A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Curvas características del motor A-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4 Conversión de las unidades de medida A-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B. Información suplementaria B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 El Command Interpreter (CI) B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Procedimiento para la transferencia de datos B-4. . . . . . . . . . . . . . . . .
B.1.2 Órdenes CI B-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Objetos CI (resumen) B-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.4 Descripción del objeto B-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Contenido e instrucciones generales
VI Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido e instrucciones generales
VIIFesto P.BE-MTR-DCI-IO-ES es 1209d
Uso al que se destina
El grupo motor MTR-DCI es un servomotor avanzado queincorpora un motor DC, reductor, encoder y electrónica decontrol (control de posicionamiento y regulador de posición).
El diseño mecánico y el interface enchufable del MTR-DCI hansido optimizados para ser utilizados con accionamiento linea-les eléctricos (p.ej. tipo DMES-...) de Festo. El motor tambiénpuede utilizarse para aplicaciones de posicionado específicasdel cliente con accionamientos por husillos lentos.
Este manual trata con las funciones básicas del MTR-DCI y elinterface de I/O del MTR-DCI-...IO. Los componentes adiciona-les, así como las variantes de bus de campo del MTR-DCI sedescriben en manuales aparte.
Es absolutamente necesario observar las instrucciones deseguridad indicadas las “Instrucciones de seguridad”, asícomo el uso previsto de los componentes y módulos corres-pondientes. Observe también las instrucciones de seguridaden las instrucciones de funcionamiento de los componenteseléctricos utilizados.
El MTR-DCI y los módulos y cables que pueden conectarse,sólo pueden utilizarse como sigue:
– de acuerdo con el uso a que se destina
– sólo en aplicaciones industriales
– sin modificaciones hechas por el usuario. Sólo sepermiten las conversiones o modificaciones descritas enla documentación suministrada con este producto.
– en condiciones técnicas sin fallos.
Si se conectan componentes disponibles comercialmente,tales como sensores y actuadores, no hay que sobrepasar loslímites especificados para temperaturas, datos eléctricos,pares, etc.
Por favor, observe los estándares especificados en los corres-pondientes capítulos y cumpla con las normas técnicas, asícomo con las regulaciones nacionales y locales.
Contenido e instrucciones generales
VIII Festo P.BE-MTR-DCI-IO-ES es 1209d
Instrucciones de seguridad
Cuando se ponen a punto y se programan sistemas de posi-cionado, deben observar las normas de seguridad indicadasen este manual, así como las indicadas en las instruccionesde los demás componentes utilizados.
El usuario debe asegurarse de que no haya nadie en la zonade funcionamiento de los actuadores conectados o del mani-pulador. El acceso a las zonas de posible riesgo debe impe-dirse con medidas adecuadas, tales como pantallas protecto-ras y signos de Atención.
AdvertenciaLos accionamientos eléctricos pueden moverse inespera-damente con fuerzas elevadas y altas velocidades. Lascolisiones pueden causar lesiones graves a las personas ydaños materiales.
Asegúrese de que nadie pueda acceder al margen opera-tivo de los actuadores conectados y de que no haya obje-tos en el recorrido del manipulador mientras el sistema sehalle conectado a la alimentación de corriente.
AdvertenciaLos fallos en la parametrización pueden causar lesiones alas personas o daños a los equipos.
Habilite el control sólo si el sistema está correctamenteinstalado y parametrizado.

Contenido e instrucciones generales
IXFesto P.BE-MTR-DCI-IO-ES es 1209d
Grupo al que se destina
Este manual está exclusivamente destinado a técnicos forma-dos en tecnología de automatización y control, con experien-cia en instalación, puesta a punto, programación y diagnosisde sistemas de posicionado.
Servicio
Consulte con el servicio local de reparación de Festo o escribaa la siguiente dirección de correo electrónico si tienen dificul-tades técnicas:
Dotación del suministro
Los siguientes elementos se suministran con el grupo motortipo MTR-DCI:
– Grupo motor con controlador integrado, opcionalmentecon panel de control.
– Paquete de manejo en CD ROM:
– Documentación de usuario (manuales)
– Festo Configuration Tool (FCT) con plugin MTR-DCI
– Documentación de usuario (breve resumen)
Como accesorios están disponibles (véase el apéndice A.2):
– Cable de conexión
– Cable de programación
– Documentación de usuario impresa en papel.
Contenido e instrucciones generales
X Festo P.BE-MTR-DCI-IO-ES es 1209d
Instrucciones importantes para el usuario
Categorías de riesgo
Este manual contiene notas sobre los riesgos que puedenproducirse si el terminal de válvulas no se utiliza correcta-mente. Estas notas están marcadas (advertencia, atención,etc.), impresas sobre fondo sombreado y acompañadas de unpictograma. Debe distinguirse entre las siguientes categoríasde riesgo:
AdvertenciaEsto significa que hay riesgo de lesiones graves a laspersonas y daños a los equipos si no se observan estasinstrucciones.
AtenciónEsto significa que hay riesgo de lesiones a las personas ydaños a los equipos si no se observan estas instruccione.
NotaEsto significa que hay riesgo de daños a los equipos si nose observan estas instrucciones.
Además, el siguiente pictograma indica lugares del texto enlos que se describen actividades con componentes sensiblesa las descargas electrostáticas:
Componentes sensibles a las corrientes electrostáticas: unmanejo inadecuado puede dañar los componentes.

Contenido e instrucciones generales
XIFesto P.BE-MTR-DCI-IO-ES es 1209d
Marcado de información especial
Los siguientes pictogramas marcan pasajes en el texto quecontienen información especial.
Pictogramas
Información:Recomendaciones, sugerencias y referencias a otras fuentesde información.
Accesorios:Detalles sobre los accesorios útiles o necesarios para losproductos Festo.
Entorno:Información sobre el uso de los productos Festo respetuosocon el entorno.
Marcas en el texto
• Esta marca indica actividades que pueden desarrollarseen cualquier orden.
1. Los números indican actividades que deben hacerse en lasecuencia indicada.
– Los guiones indican actividades en general.
Contenido e instrucciones generales
XII Festo P.BE-MTR-DCI-IO-ES es 1209d
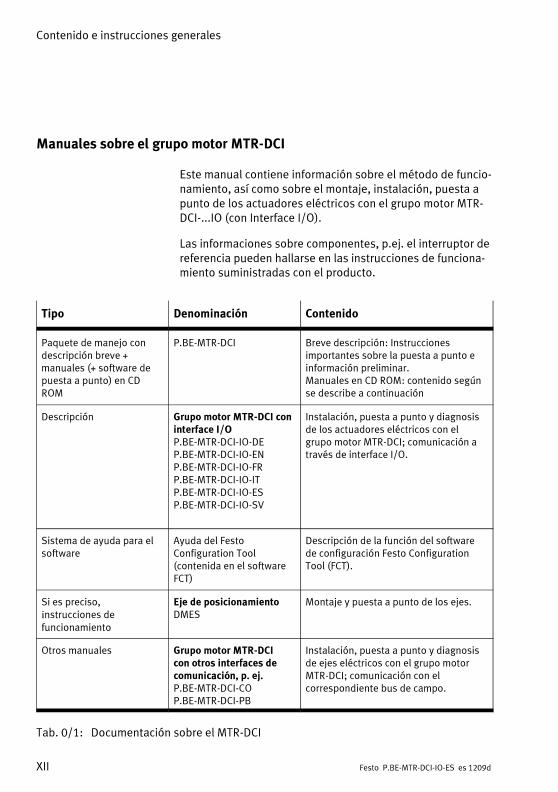
Manuales sobre el grupo motor MTR-DCI
Este manual contiene información sobre el método de funcio-namiento, así como sobre el montaje, instalación, puesta apunto de los actuadores eléctricos con el grupo motor MTR-DCI-...IO (con Interface I/O).
Las informaciones sobre componentes, p.ej. el interruptor dereferencia pueden hallarse en las instrucciones de funciona-miento suministradas con el producto.
Tipo Denominación Contenido
Paquete de manejo condescripción breve +manuales (+ software depuesta a punto) en CDROM
P.BE-MTR-DCI Breve descripción: Instruccionesimportantes sobre la puesta a punto einformación preliminar.Manuales en CD ROM: contenido segúnse describe a continuación
Descripción Grupo motor MTR-DCI coninterface I/OP.BE-MTR-DCI-IO-DEP.BE-MTR-DCI-IO-ENP.BE-MTR-DCI-IO-FRP.BE-MTR-DCI-IO-ITP.BE-MTR-DCI-IO-ESP.BE-MTR-DCI-IO-SV
Instalación, puesta a punto y diagnosisde los actuadores eléctricos con elgrupo motor MTR-DCI; comunicación através de interface I/O.
Sistema de ayuda para elsoftware
Ayuda del FestoConfiguration Tool(contenida en el softwareFCT)
Descripción de la función del softwarede configuración Festo ConfigurationTool (FCT).
Si es preciso,instrucciones defuncionamiento
Eje de posicionamientoDMES
Montaje y puesta a punto de los ejes.
Otros manuales Grupo motor MTR-DCIcon otros interfaces decomunicación, p. ej.P.BE-MTR-DCI-COP.BE-MTR-DCI-PB
Instalación, puesta a punto y diagnosisde ejes eléctricos con el grupo motorMTR-DCI; comunicación con elcorrespondiente bus de campo.
Tab. 0/1: Documentación sobre el MTR-DCI
Contenido e instrucciones generales
XIIIFesto P.BE-MTR-DCI-IO-ES es 1209d
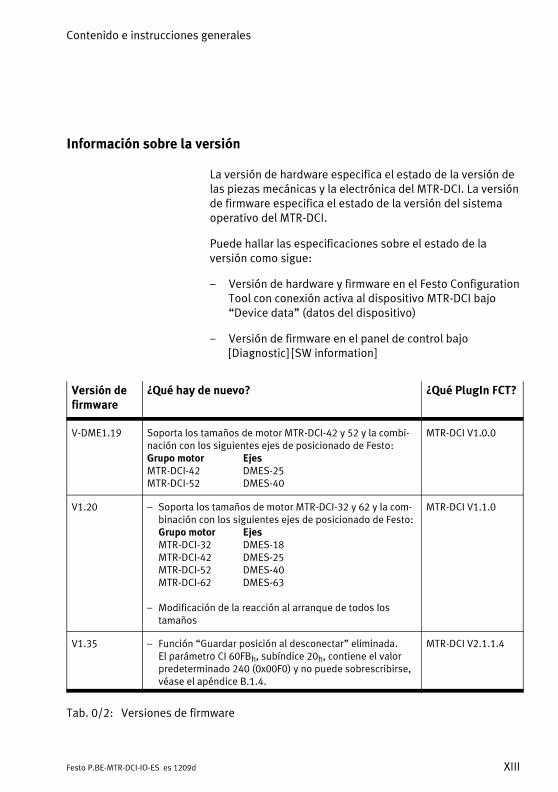
Información sobre la versión
La versión de hardware especifica el estado de la versión delas piezas mecánicas y la electrónica del MTR-DCI. La versiónde firmware especifica el estado de la versión del sistemaoperativo del MTR-DCI.
Puede hallar las especificaciones sobre el estado de laversión como sigue:
– Versión de hardware y firmware en el Festo ConfigurationTool con conexión activa al dispositivo MTR-DCI bajo“Device data” (datos del dispositivo)
– Versión de firmware en el panel de control bajo[Diagnostic] [SW information]
Versión defirmware
¿Qué hay de nuevo? ¿Qué PlugIn FCT?
V-DME1.19 Soporta los tamaños de motor MTR-DCI-42 y 52 y la combi-nación con los siguientes ejes de posicionado de Festo:Grupo motor EjesMTR-DCI-42 DMES-25MTR-DCI-52 DMES-40
MTR-DCI V1.0.0
V1.20 – Soporta los tamaños de motor MTR-DCI-32 y 62 y la com-binación con los siguientes ejes de posicionado de Festo:Grupo motor EjesMTR-DCI-32 DMES-18MTR-DCI-42 DMES-25MTR-DCI-52 DMES-40MTR-DCI-62 DMES-63
– Modificación de la reacción al arranque de todos lostamaños
MTR-DCI V1.1.0
V1.35 – Función “Guardar posición al desconectar” eliminada.El parámetro CI 60FBh, subíndice 20h, contiene el valorpredeterminado 240 (0x00F0) y no puede sobrescribirse,véase el apéndice B.1.4.
MTR-DCI V2.1.1.4
Tab. 0/2: Versiones de firmware
Contenido e instrucciones generales
XIV Festo P.BE-MTR-DCI-IO-ES es 1209d
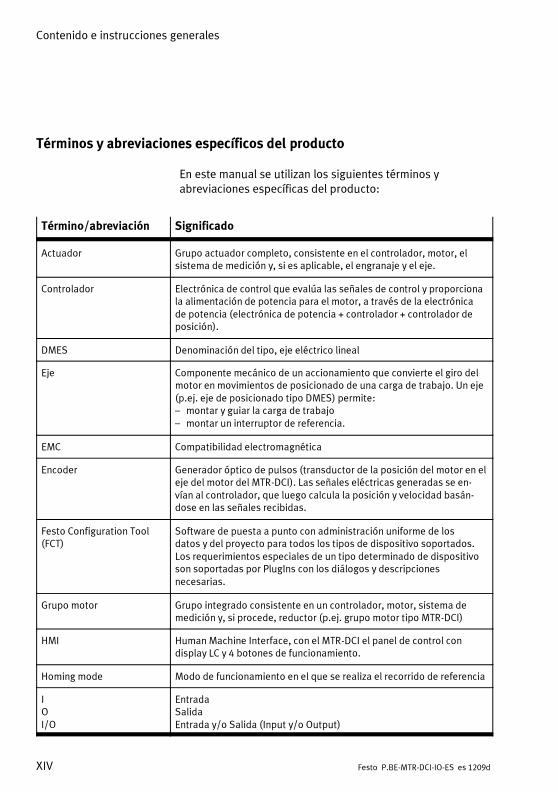
Términos y abreviaciones específicos del producto
En este manual se utilizan los siguientes términos yabreviaciones específicas del producto:
Término/abreviación Significado
Actuador Grupo actuador completo, consistente en el controlador, motor, elsistema de medición y, si es aplicable, el engranaje y el eje.
Controlador Electrónica de control que evalúa las señales de control y proporcionala alimentación de potencia para el motor, a través de la electrónicade potencia (electrónica de potencia + controlador + controlador deposición).
DMES Denominación del tipo, eje eléctrico lineal
Eje Componente mecánico de un accionamiento que convierte el giro delmotor en movimientos de posicionado de una carga de trabajo. Un eje(p.ej. eje de posicionado tipo DMES) permite:– montar y guiar la carga de trabajo– montar un interruptor de referencia.
EMC Compatibilidad electromagnética
Encoder Generador óptico de pulsos (transductor de la posición del motor en eleje del motor del MTR-DCI). Las señales eléctricas generadas se en-vían al controlador, que luego calcula la posición y velocidad basán-dose en las señales recibidas.
Festo Configuration Tool(FCT)
Software de puesta a punto con administración uniforme de losdatos y del proyecto para todos los tipos de dispositivo soportados.Los requerimientos especiales de un tipo determinado de dispositivoson soportadas por PlugIns con los diálogos y descripcionesnecesarias.
Grupo motor Grupo integrado consistente en un controlador, motor, sistema demedición y, si procede, reductor (p.ej. grupo motor tipo MTR-DCI)
HMI HumanMachine Interface, con el MTR-DCI el panel de control condisplay LC y 4 botones de funcionamiento.
Homing mode Modo de funcionamiento en el que se realiza el recorrido de referencia
IOI/O
EntradaSalidaEntrada y/o Salida (Input y/o Output)

Contenido e instrucciones generales
XVFesto P.BE-MTR-DCI-IO-ES es 1209d
Término/abreviación Significado
Interruptor de referencia Detector externo (p.ej. tipo SME-8 o SIEN-..) que sirve para determinarla posición de referencia y que se conecta directamente al controla-dor.
Método del recorrido dereferencia
Método para determinar la posición de referencia: contra un tope fijo(evaluación de sobrecorriente / velocidad) o con interruptor de refe-rencia.
Modo de funcionamiento Tipo de controlador o modo de funcionamiento interno delcontrolador.– Tipo de control: Modo Record Select, modo Direct– Modo de funcionamiento del controlador: Modo Position profile,
modo Homing, modo Demo, ...
Modo de posicionado(Profile Position mode)
Modo de funcionamiento para procesar un registro de posicionado ouna tarea directa de posicionado.
Modo Teach (autoprogra-mación) (Teach mode)
Modo de funcionamiento para establecer posiciones moviéndose a laposición de destino p.ej. cuando se crean registros de posiciones.
Modo Tipo Posicionamiento manual en sentido positivo o negativo (sólo en lasvariantes con bus de campo del MTR-DCI a través del bus de campo osólo con FCT o panel de control).
PLC Control Lógico Programable: para abreviar: controlador: PLC:progammable logic controller).
Posición final por software Limitación programable de la carrera (punto base = punto cero deleje)– Posición final por software, positiva:
posición límite máxima de la carrera en sentido positivo; no debesobrepasarse durante el posicionado.
– Posición final por software, negativa:posición límite mínima en sentido negativo; no debe sobrepasarsedurante el posicionado.
Punto cero del eje (AZ) Punto de base de las mediciones para el punto cero del proyecto y lasposiciones finales por software. El punto de base para el punto cerodel eje es el punto de referencia. Corresponde a punto cero del pro-yecto en el MTR-DCI (offset = 0).
Contenido e instrucciones generales
XVI Festo P.BE-MTR-DCI-IO-ES es 1209d
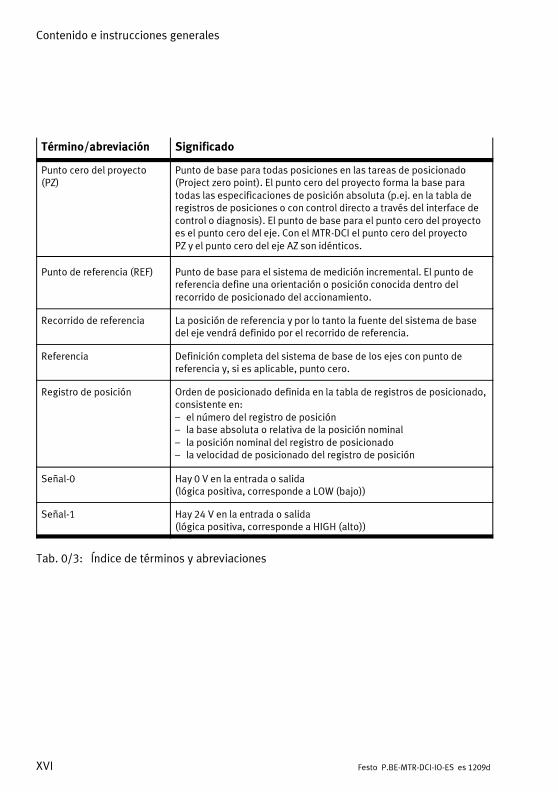
Término/abreviación Significado
Punto cero del proyecto(PZ)
Punto de base para todas posiciones en las tareas de posicionado(Project zero point). El punto cero del proyecto forma la base paratodas las especificaciones de posición absoluta (p.ej. en la tabla deregistros de posiciones o con control directo a través del interface decontrol o diagnosis). El punto de base para el punto cero del proyectoes el punto cero del eje. Con el MTR-DCI el punto cero del proyectoPZ y el punto cero del eje AZ son idénticos.
Punto de referencia (REF) Punto de base para el sistema de medición incremental. El punto dereferencia define una orientación o posición conocida dentro delrecorrido de posicionado del accionamiento.
Recorrido de referencia La posición de referencia y por lo tanto la fuente del sistema de basedel eje vendrá definido por el recorrido de referencia.
Referencia Definición completa del sistema de base de los ejes con punto dereferencia y, si es aplicable, punto cero.
Registro de posición Orden de posicionado definida en la tabla de registros de posicionado,consistente en:– el número del registro de posición– la base absoluta o relativa de la posición nominal– la posición nominal del registro de posicionado– la velocidad de posicionado del registro de posición
Señal-0 Hay 0 V en la entrada o salida(lógica positiva, corresponde a LOW (bajo))
Señal-1 Hay 24 V en la entrada o salida(lógica positiva, corresponde a HIGH (alto))
Tab. 0/3: Índice de términos y abreviaciones

Resumen del sistema
1-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Capítulo 1
Resumen del sistema

1. Resumen del sistema
1-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
1. Resumen del sistema 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Posicionamiento con actuadores eléctricos 1-3. . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Componentes 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Funciones de control y regulación 1-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Seguridad funcional 1-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Sistema de referencia de medida 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Puntos de base y margen de trabajo 1-10. . . . . . . . . . . . . . . . . . . . . . . .
1.5.2 Signos y sentidos 1-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Recorrido de referencia 1-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. Resumen del sistema
1-3Festo P.BE-MTR-DCI-IO-ES es 1209d
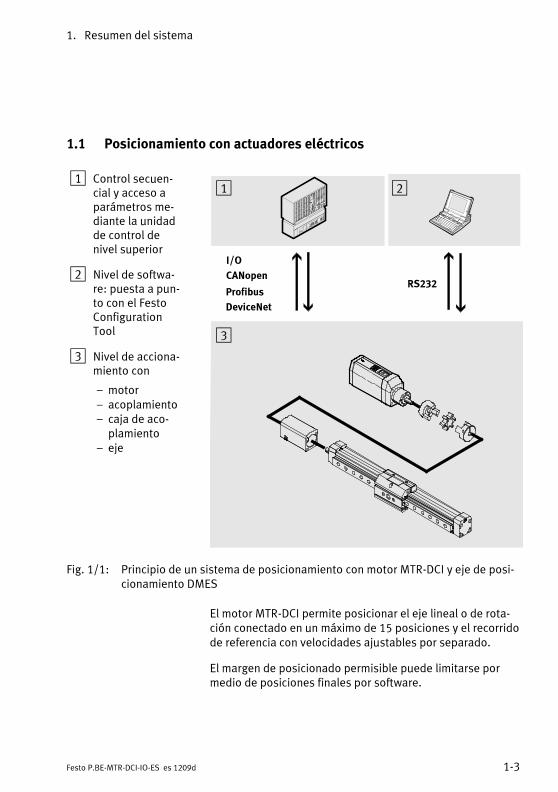
1.1 Posicionamiento con actuadores eléctricos
1 Control secuen-cial y acceso aparámetros me-diante la unidadde control denivel superior
2 Nivel de softwa-re: puesta a pun-to con el FestoConfigurationTool
3 Nivel de acciona-miento con
– motor– acoplamiento– caja de aco-plamiento
– eje
CANopen
I/O
RS232
1 2
3
Profibus
DeviceNet
Fig. 1/1: Principio de un sistema de posicionamiento con motor MTR-DCI y eje de posi-cionamiento DMES
El motor MTR-DCI permite posicionar el eje lineal o de rota-ción conectado en un máximo de 15 posiciones y el recorridode referencia con velocidades ajustables por separado.
El margen de posicionado permisible puede limitarse pormedio de posiciones finales por software.

1. Resumen del sistema
1-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
Es posible parametrizar y poner a punto el MTR-DCI como seindica a continuación:
– con el paquete de software FCT, a través de la interfazRS232 de su PC.
– con el panel de control opcional con display y 4 botonesoperativos (solo MTR-DCI-...-H2)
El acoplamiento a un PLC/IPC de nivel superior se realiza através de entradas/salidas digitales.
Funciones HMI FCT
Parametrización – Selección del tipo de eje y de los parámetros del eje– Especificación del factor de reducción (con reductor
externo de engranajes)– Carga / descarga de datos de configuración– Memorización de diferentes configuraciones en
proyectos
x
––
–
x
xx
x
Frases deposicionamiento
– Creación de una tabla de frases de posicionamiento conel número de frase, la posición de destino, el modo deposicionamiento, la velocidad de posicionamiento y laaceleración
x x
Puesta a punto – Recorrido de referencia– Operación por actuación secuencial– Programación tipo teach-in de posiciones– Movimiento en pasos individuales– Arranque y parada de procedimientos de posicionamien-
to durante la puesta a punto– Funciones de prueba ampliadas, p. ej. indicaciones de
estado– Prueba o demostración de las frases de posicionamiento
xxx–
x
–x
xxxx
x
xx
Diagnosis /Asistenciatécnica
– Lectura y visualización de datos de diagnosis x x
Tab. 1/1: Funciones
1. Resumen del sistema
1-5Festo P.BE-MTR-DCI-IO-ES es 1209d
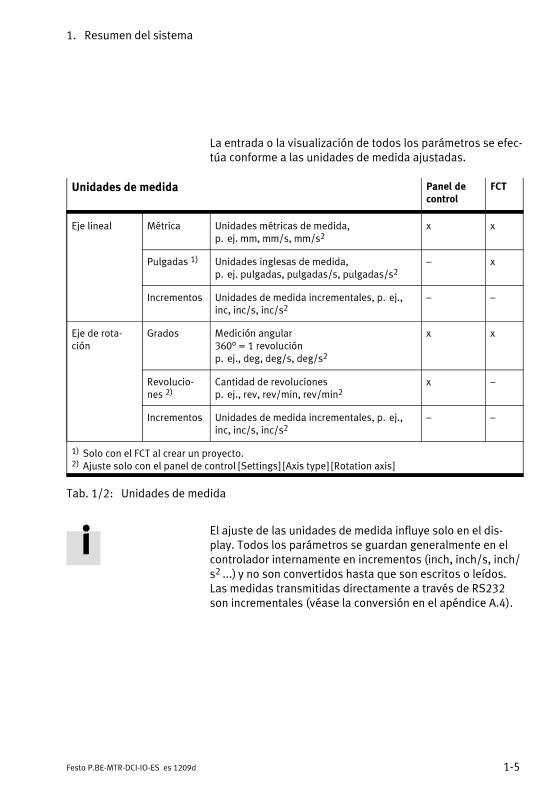
La entrada o la visualización de todos los parámetros se efec-túa conforme a las unidades de medida ajustadas.
Unidades de medida Panel decontrol
FCT
Eje lineal Métrica Unidades métricas de medida,p. ej. mm, mm/s, mm/s2
x x
Pulgadas 1) Unidades inglesas de medida,p. ej. pulgadas, pulgadas/s, pulgadas/s2
– x
Incrementos Unidades de medida incrementales, p. ej.,inc, inc/s, inc/s2
– –
Eje de rota-ción
Grados Medición angular360° = 1 revoluciónp. ej., deg, deg/s, deg/s2
x x
Revolucio-nes 2)
Cantidad de revolucionesp. ej., rev, rev/min, rev/min2
x –
Incrementos Unidades de medida incrementales, p. ej.,inc, inc/s, inc/s2
– –
1) Solo con el FCT al crear un proyecto.2) Ajuste solo con el panel de control [Settings] [Axis type] [Rotation axis]
Tab. 1/2: Unidades de medida
El ajuste de las unidades de medida influye solo en el dis-play. Todos los parámetros se guardan generalmente en elcontrolador internamente en incrementos (inch, inch/s, inch/s2 ...) y no son convertidos hasta que son escritos o leídos.Las medidas transmitidas directamente a través de RS232son incrementales (véase la conversión en el apéndice A.4).

1. Resumen del sistema
1-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
1.2 Componentes
Para poner a punto un eje eléctrico con el MTR-DCI necesi-tará los siguientes componentes:
Motor MTR-DCI Motor con controlador, disponible en 4 tamaños, opcional-mente con panel de control (tipo ...-H2).Por medio de diferentes engranajes reductores se puedencumplir distintos requerimientos relacionados con el par desalida (de reducción) y la velocidad de salida (de reducción)(véase el apéndice A.1). Los pares elevados con velocidadbaja son característicos en las aplicaciones de posiciona-miento. Con el engranaje reductor más pequeño se puedeaumentar la velocidad de posicionamiento del eje con lacorrespondiente fuerza reducida.
Eje Ejes lineales o de rotación según el catálogo
Acoplamiento con caja deacoplamiento
Para el montaje axial de ejes de Festo, p. ej., tipo DMES...- otipo DNCE-... están disponibles acoplamientos y cajas deacoplamiento como accesorios. La conexión del motor conel eje se realiza mediante una unión de sujeción en la cajade acoplamiento. Por ello no son necesarias bridas de mo-tor adicionales. Hallará más información en las instruccio-nes de utilización del eje.
Cable de alimentación Para la alimentación del MTR_DCI con tensión de funciona-miento a través de unaunidad de alimentación (DC 24 V / tamaño 62: 48 V)
Cable de programación Para parametrizar el MTR-DCI durante la puesta a punto conayuda del FCT
Interruptor de referencia Sensor según el apéndice A.2.
Accesorios Festo ofrece accesorios especialmente adaptados para lossistemas de posicionamiento (véase el programa de sumi-nistro o el catálogo).
1. Resumen del sistema
1-7Festo P.BE-MTR-DCI-IO-ES es 1209d
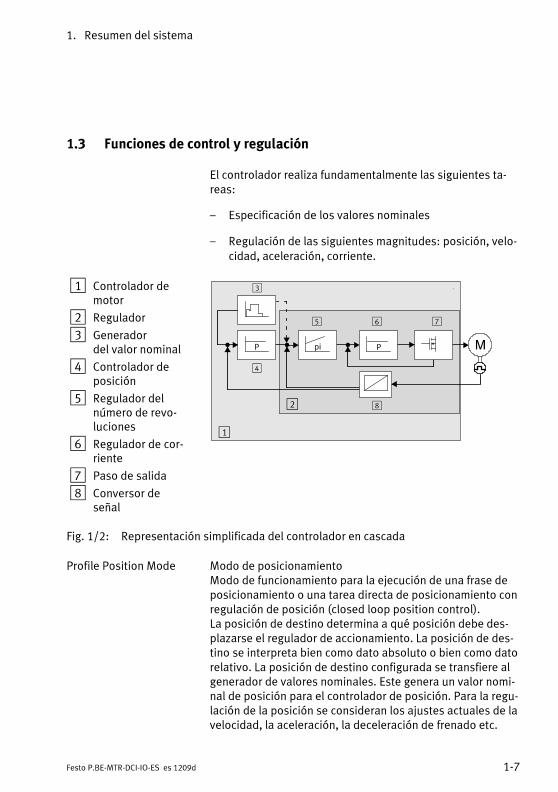
1.3 Funciones de control y regulación
El controlador realiza fundamentalmente las siguientes ta-reas:
– Especificación de los valores nominales
– Regulación de las siguientes magnitudes: posición, velo-cidad, aceleración, corriente.
1 Controlador demotor
2 Regulador
3 Generadordel valor nominal
4 Controlador deposición
5 Regulador delnúmero de revo-luciones
6 Regulador de cor-riente
7 Paso de salida
8 Conversor deseñal
MP pi
3
8
4
5 6 7
1
2
P
Fig. 1/2: Representación simplificada del controlador en cascada
Profile Position Mode Modo de posicionamientoModo de funcionamiento para la ejecución de una frase deposicionamiento o una tarea directa de posicionamiento conregulación de posición (closed loop position control).La posición de destino determina a qué posición debe des-plazarse el regulador de accionamiento. La posición de des-tino se interpreta bien como dato absoluto o bien como datorelativo. La posición de destino configurada se transfiere algenerador de valores nominales. Este genera un valor nomi-nal de posición para el controlador de posición. Para la regu-lación de la posición se consideran los ajustes actuales de lavelocidad, la aceleración, la deceleración de frenado etc.

1. Resumen del sistema
1-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
El encoder incremental interno (encoder óptico) reconoce loscambios de posición. Si se conoce el punto de partida, laposición real se obtiene a partir del engranaje reductor y/odel gradiente del husillo.
Homing Mode Recorrido de referencia.Realización de un procedimiento de posicionamiento en elque se determina el punto de referencia y, con ello, el origendel sistema de referencia de medida del eje, p.ej. medianteun interruptor de referencia dentro del recorrido de desplaza-miento posible o mediante la evaluación de la sobrecorrienteen un recorrido hasta el tope.
Para la puesta a punto, para verificación o para demostra-ción, también hay disponibles las siguientes funciones através del panel de control del MTR-DCI-...-H2:
– Recorrido de posicionado para definir la posición dedestino de un registro de posición [Settings][Position set].
– Recorrido de posicionado para verificar todos losregistros de posición en la tabla [Demo posit tab].
– Recorrido de posicionado para verificar cierto registro deposición en la tabla [Move posit set].
1. Resumen del sistema
1-9Festo P.BE-MTR-DCI-IO-ES es 1209d
1.4 Seguridad funcional
Un amplio sistema de sensores y funciones de supervisiónaseguran un correcto funcionamiento:
– Supervisión i2t
– Supervisión de temperatura (medición de la temperaturadel motor y la temperatura de la etapa final de potencia)
– Supervisión de la intensidad
– Supervisión de la tensión
– Reconocimiento de fallos en la alimentación detensión interna.
– MTR-DCI-62...: detección de sobretensiones en el cir-cuito intermedio; chopper de frenado integrado.
– Supervisión del fallo de seguimiento
– Reconocimiento de la posición final por software.
Observe lo siguiente:
• Mediante la disposición de los detectores de final de ca-rrera y, si es necesario, con topes mecánicos adicionales,asegúrese de que el eje se encuentra siempre dentro delmargen de posicionamiento permisible.
1. Resumen del sistema
1-10 Festo P.BE-MTR-DCI-IO-ES es 1209d
Advertencia• Observe que el MTR-DCI-...IO no tiene ninguna tensiónde alimentación separada para la lógica.
• Compruebe su concepto de DESCONEXIÓN DE EMER-GENCIA para determinar las medidas necesarias a fin deponer el sistema en un estado seguro en caso de DES-CONEXIÓN DE EMERGENCIA.
• Si su aplicación requiere un circuito de DESCONEXIÓNDE EMERGENCIA, utilice detectores de final de carrerade seguridad adicionales separados (p.ej. como contac-tos normalmente cerrados conectados en serie)– para cancelar la señal ENABLE en la interfaz de con-trol,
– o para desconectar la tensión de la carga si es neces-ario.
1.5 Sistema de referencia de medida
Para la puesta a punto es necesario especificar un sistema dereferencia de medida para referenciar las coordenadas dereferencia. El sistema de referencia de medida permite deter-minar todas las posiciones (absolutas) y desplazarse hastaellas.
1.5.1 Puntos de base y margen de trabajo
El sistema de base del MTR-DCI está basado en el punto cerodel eje, que viene definido a través del offset al punto dereferencia.
Recorrido de referencia La posición del punto de referencia REF se define durante elrecorrido de referencia. Tras finalizar el recorrido de referen-cia, el eje permanece en el punto cero del eje AZ.
Método del recorrido Con el método del recorrido de referencia se establece elde referencia modo en que se determinará el punto de referencia.
Punto de referencia REF Es el punto inicial mecánico del sistema de referencia de me-dida y – dependiendo del método del recorrido de referencia– se determina durante el recorrido de referencia mediante
1. Resumen del sistema
1-11Festo P.BE-MTR-DCI-IO-ES es 1209d
un interruptor de referencia o un tope fijo. Es el punto dereferencia del punto cero del eje.
Axis zero point AZ Punto cero del eje. Es desplazado por una distancia definidadesde el punto de referencia (offset del punto cero del eje) yes el punto de base de las posiciones finales por software yel punto cero del proyecto. Definiendo el punto cero del eje ylas posiciones finales por software puede limitarse el área detrabajo del eje lineal al margen permitido (carrera de trabajo).
Software end positions Posiciones finales por software. Limitan el margen de posi-cionado permitido (carrera de trabajo). Si la posición de des-tino de una orden de posicionado queda fuera de las posicio-nes finales por software, la orden de posicionado no seráprocesada y se mostrará un estado de fallo.
Project zero point PZ Punto cero del proyecto. Es un punto de base que el usuariopuede seleccionar dentro de la carrera de trabajo y al que sereferirán tanto las posiciones actuales como las de destinoen la tabla de registros de posiciones. El punto cero del ejeAZ es el punto de base para el punto cero del proyecto.
El punto cero del proyecto PZ es especificado con el MTR-DCIy es idéntico al punto cero del eje AZ (offset del punto cerodel proyecto = 0).
1. Resumen del sistema
1-12 Festo P.BE-MTR-DCI-IO-ES es 1209d
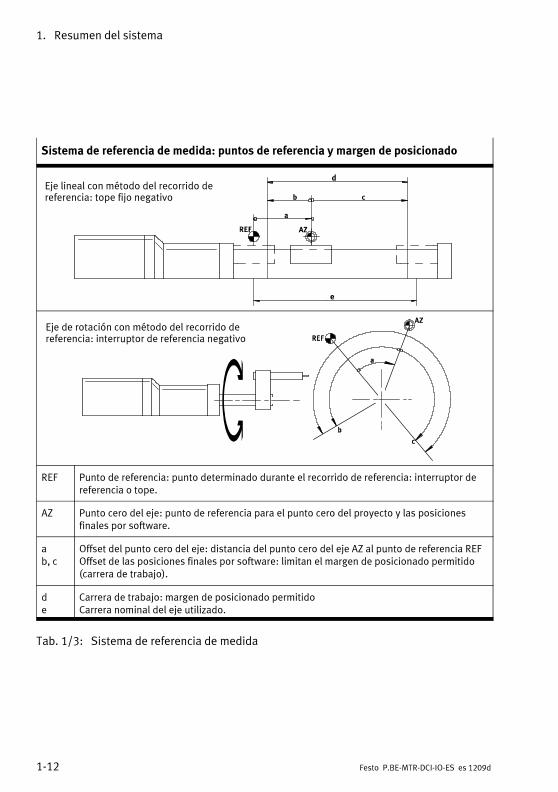
Sistema de referencia de medida: puntos de referencia y margen de posicionado
d
e
Eje lineal con método del recorrido dereferencia: tope fijo negativo
Eje de rotación con método del recorrido dereferencia: interruptor de referencia negativo
REF Punto de referencia: punto determinado durante el recorrido de referencia: interruptor dereferencia o tope.
AZ Punto cero del eje: punto de referencia para el punto cero del proyecto y las posicionesfinales por software.
ab, c
Offset del punto cero del eje: distancia del punto cero del eje AZ al punto de referencia REFOffset de las posiciones finales por software: limitan el margen de posicionado permitido(carrera de trabajo).
de
Carrera de trabajo: margen de posicionado permitidoCarrera nominal del eje utilizado.
Tab. 1/3: Sistema de referencia de medida
1. Resumen del sistema
1-13Festo P.BE-MTR-DCI-IO-ES es 1209d
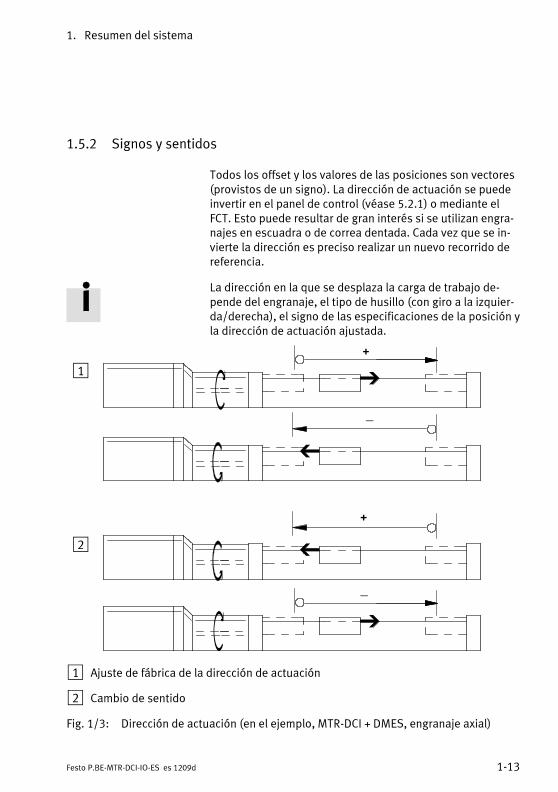
1.5.2 Signos y sentidos
Todos los offset y los valores de las posiciones son vectores(provistos de un signo). La dirección de actuación se puedeinvertir en el panel de control (véase 5.2.1) o mediante elFCT. Esto puede resultar de gran interés si se utilizan engra-najes en escuadra o de correa dentada. Cada vez que se in-vierte la dirección es preciso realizar un nuevo recorrido dereferencia.
La dirección en la que se desplaza la carga de trabajo de-pende del engranaje, el tipo de husillo (con giro a la izquier-da/derecha), el signo de las especificaciones de la posición yla dirección de actuación ajustada.
+
—
+
—
1
2
1 Ajuste de fábrica de la dirección de actuación
2 Cambio de sentido
Fig. 1/3: Dirección de actuación (en el ejemplo, MTR-DCI + DMES, engranaje axial)
1. Resumen del sistema
1-14 Festo P.BE-MTR-DCI-IO-ES es 1209d
1.5.3 Recorrido de referencia
En los actuadores con sistema de medición del recorrido in-cremental, el recorrido de referencia debe realizarse cada vezque se enciende el dispositivo.
Se permiten los siguientes modos de recorrido de referencia:
– Búsqueda del tope en sentido negativo
– Búsqueda del tope en sentido positivo
– Búsqueda del interruptor de referencia en sentido po-sitivo
– Búsqueda del interruptor de referencia en sentido negati-vo [default].
Para buscar el punto de referencia y para posicionar el actua-dor en el punto cero del eje, pueden ajustarse dos velocida-des diferentes.
Secuencia del recorrido de referencia:
1. Búsqueda del punto de referencia de acuerdo con el mé-todo configurado
2. Recorrido desde el punto de referencia hasta el puntocero del eje AZ (desplazamiento del punto cero del eje)
Una vez realizado el recorrido de referencia satisfactoriamen-te, el actuador se encuentra en el punto cero del eje AZ. En laprimera puesta a punto o después de modificar el método derecorrido de referencia, el desplazamiento del punto cero deleje es = 0. Tras el recorrido de referencia, el accionamientose encuentra en el punto de referencia REF.

1. Resumen del sistema
1-15Festo P.BE-MTR-DCI-IO-ES es 1209d
Búsqueda del tope fijo Con este método de recorrido de referencia el actuador semueve primero con la velocidad de búsqueda en sentidonegativo o positivo, hasta que llega al tope fijo. Un aumentoen la corriente del motor indica que se ha alcanzado el tope.Si se alcanza la corriente máx. del motor al mismo tiempoque se detiene el motor, el MTR-DCI reconoce que se ha lle-gado a un tope y, con ello, a la posición de referencia.
Dado que el eje no debe detenerse en el tope, el desplaza-miento del punto cero del eje debe ser ≠ 0 (mín. 0,25 mm).
+
—
REF (-)
AZ
REF (+)
1
2
AZ
1 Tope en sentido negativo
2 Tope en sentido positivo
Fig. 1/4: Método del recorrido de referencia “Búsqueda del tope fijo”
1. Resumen del sistema
1-16 Festo P.BE-MTR-DCI-IO-ES es 1209d
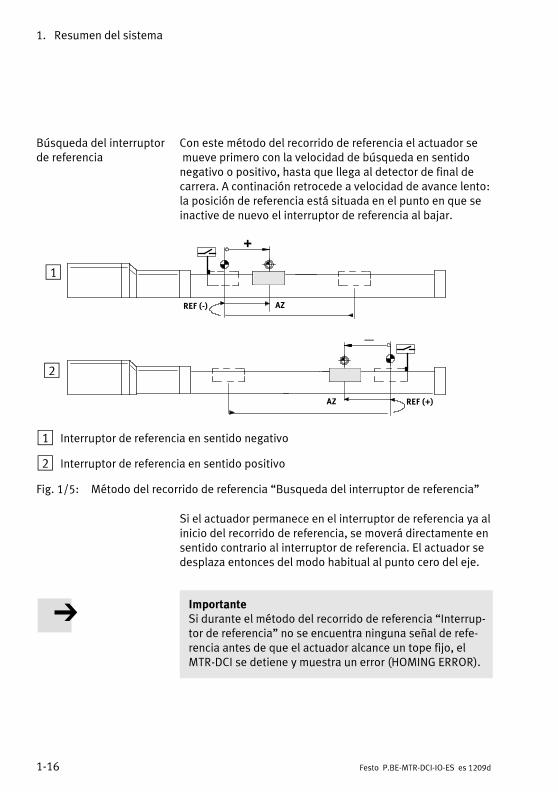
Búsqueda del interruptor Con este método del recorrido de referencia el actuador sede referencia mueve primero con la velocidad de búsqueda en sentido
negativo o positivo, hasta que llega al detector de final decarrera. A continación retrocede a velocidad de avance lento:la posición de referencia está situada en el punto en que seinactive de nuevo el interruptor de referencia al bajar.
REF (-) AZ
REF (+)
1
2
AZ
+
—
1 Interruptor de referencia en sentido negativo
2 Interruptor de referencia en sentido positivo
Fig. 1/5: Método del recorrido de referencia “Busqueda del interruptor de referencia”
Si el actuador permanece en el interruptor de referencia ya alinicio del recorrido de referencia, se moverá directamente ensentido contrario al interruptor de referencia. El actuador sedesplaza entonces del modo habitual al punto cero del eje.
ImportanteSi durante el método del recorrido de referencia “Interrup-tor de referencia” no se encuentra ninguna señal de refe-rencia antes de que el actuador alcance un tope fijo, elMTR-DCI se detiene y muestra un error (HOMING ERROR).
Montaje
2-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Capítulo 2
Montaje
2. Montaje
2-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
2. Montaje 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Instrucciones generales 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Dimensiones del grupo motor 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Montaje de ejes eléctricos 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Montaje
2-3Festo P.BE-MTR-DCI-IO-ES es 1209d
2.1 Instrucciones generales
AdvertenciaDescargas eléctricas.
Antes de realizar trabajos de instalación o mantenimiento,desconectar siempre la alimentación de los componenteselectrónicos.
NotaTrate los módulos y componentes con el mayor cuidado.Por favor, observe en especial lo siguiente:
– Las conexiones roscadas deben montarse sin desplazar-las y sin tensiones mecánicas. Los tornillos deben ajus-tar exactamente (de lo contrario se dañan las roscas).
– Deben respetarse los pares especificados.
– Los módulos no deben desplazarse.
– Las superficies de contacto deben estar limpias (evitarfalsos contactos).

2. Montaje
2-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
2.2 Dimensiones del grupo motor
H0
H2
H1
B1B2
D1D2
D3
D4
L1
L2 L3
L4L55
13
T1
Tamaños [mm] 32 42 52 62
Relación de transmisión G7/G14 G7 G14 G7 G14 G7/G14/G22
Diámetro de labrida/eje
D D1D2D3D4
——21,5 h86 h7
42 g1042 ±0,125 h88 h7
52 g1052 ±0,132 h812 h7
62 g1062 ±0,140 j714 h7
Alto H H0H1H2
65,3 ±0,421,6 ±0,1541,5 ±0,3
70,8 ±0,426,5 ±0,654,5 ±0,4
94,8 ±0,437 ±0,976,5 ±0,4
128 ±0,560,8 ±0,35128 ±0,5
Largo L L1L2L3L4
175,5±1—18,7 ±0,62,5 ±0,3
176 ±133,3 ±125 ±12 ±0,2
176 ±146,3 ±125 ±12 ±0,2
194 ±139 ±133 ±13 ±0,3
194 ±153 ±133 ±13 ±0,3
270 ±147 ±139 ±15 ±0,3
Ancho B B1B2
33,8 ±0,346,3 ±0,4
44,8 ±0,453,3 ±0,4
63,8 ±0,469,5 ±0,4
105,1 ±0,4105,1 ±0,4
Fondo T T1 6 M3 : 7 / M4 : 10 10 10
Tab. 2/1: Dimensiones del grupo motor
2. Montaje
2-5Festo P.BE-MTR-DCI-IO-ES es 1209d
2.3 Montaje de ejes eléctricos
Véase la siguiente documentación cuando se monten ejeseléctricos:
– Instrucciones de funcionamiento para los ejes utilizados
– Instrucciones para los componentes utilizados.
AdvertenciaSi un eje está montado en posición vertical o inclinada, lacarga de trabajo puede caerse y dañar a alguien.
• Utilice el grupo motor preferentemente con husillos irre-versibles o autofrenantes. Con ello se evita que caiga lamasa si hay un fallo de tensión inesperado.
• Con DMES: Verifique si es necesario tomar medidasadicionales de seguridad externas contra la rotura de latuerca del husillo (p.ej. trinquetes o bulones movibles).
Asegúrese de que:
• el accionamiento está sujeto con seguridad y está libre dedistorsiones
• el espacio de trabajo en el que se mueve el eje es detamaño suficiente para el funcionamiento con la carga
• la carga no colisiona con ningún componente delaccionamiento cuando la corredera se desplaza a laposición final.
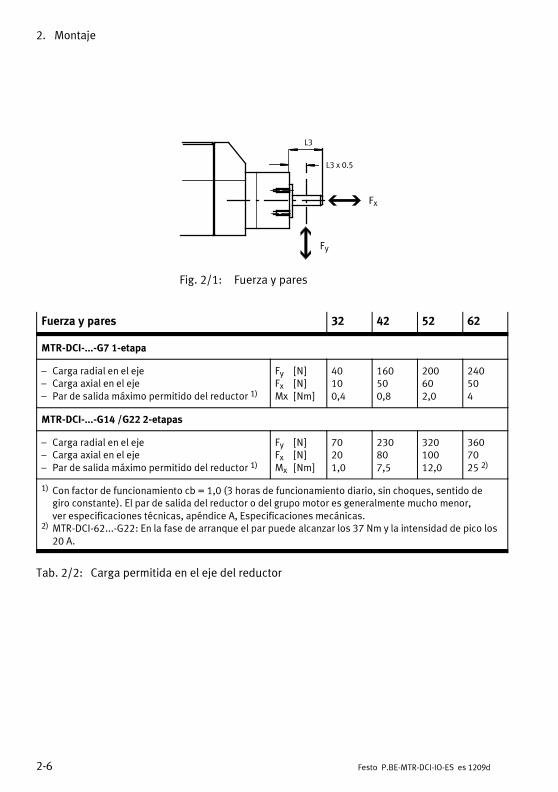
• Asegúrese de que se observan los valores máximos per-mitidos de la siguientes variables: el punto de referenciapara fuerzas y pares es el centro del eje (L3 ver Tab. 2/1).
2. Montaje
2-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
L3
L3 x 0.5
Fy
Fx
Fig. 2/1: Fuerza y pares
Fuerza y pares 32 42 52 62
MTR-DCI-...-G7 1-etapa
– Carga radial en el eje– Carga axial en el eje– Par de salida máximo permitido del reductor 1)
Fy [N]Fx [N]Mx [Nm]
40100,4
160500,8
200602,0
240504
MTR-DCI-...-G14 /G22 2-etapas
– Carga radial en el eje– Carga axial en el eje– Par de salida máximo permitido del reductor 1)
Fy [N]Fx [N]Mx [Nm]
70201,0
230807,5
32010012,0
3607025 2)
1) Con factor de funcionamiento cb = 1,0 (3 horas de funcionamiento diario, sin choques, sentido degiro constante). El par de salida del reductor o del grupo motor es generalmente mucho menor,ver especificaciones técnicas, apéndice A, Especificaciones mecánicas.
2) MTR-DCI-62...-G22: En la fase de arranque el par puede alcanzar los 37 Nm y la intensidad de pico los20 A.
Tab. 2/2: Carga permitida en el eje del reductor

2. Montaje
2-7Festo P.BE-MTR-DCI-IO-ES es 1209d
NotaEl grupo motor MTR-DCI-62...-G22 puede generar un parde hasta 37 Nm y una intensidad de pico de 20 A en la fasede arranque.
• Asegúrese de calcular la carga dinámica de forma queno se sobrepase el par de salida máximo permitido delreductor en la fase de arranque (p.ej. reduciendo lacarga).
Use la rosca en la parte frontal del reductor (ver Fig. 2/2)para montar el MTR-DCI a un dispositivo de accionamientomecánico (bastidor de la máquina).
• Para minimizar el desplazamiento del eje: Posicione el ejecon ayuda del diámetro de centraje (D1 o D3 verTab. 2/1) en relación al eje de rotación del mecanismo aaccionar.
• Fije el grupo motor con 4 tornillos y apriételos con el parespecificado.
El grup motor MTR-DCI-32 tiene 6 roscas para diferentesvariantes de montaje (axial, paralelo); aquí debe usarse4 tornillos.
Tamaño Profundidad de la rosca Par de apriete
MTR-DCI-32 M3 6 mm 1,2 Nm
MTR-DCI-42 M3 7 mm 1,2 Nm
M4 10 mm 2,9 Nm
MTR-DCI-52 M5 10 mm 5,9 Nm
MTR-DCI-62 M5 10 mm 5,9 Nm
Tab. 2/3: Pares de apriete
2. Montaje
2-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
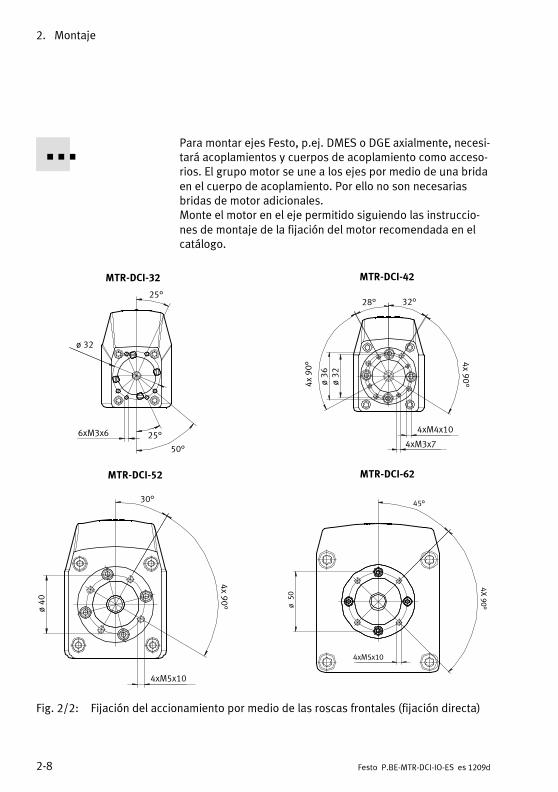
Para montar ejes Festo, p.ej. DMES o DGE axialmente, necesi-tará acoplamientos y cuerpos de acoplamiento como acceso-rios. El grupo motor se une a los ejes por medio de una bridaen el cuerpo de acoplamiento. Por ello no son necesariasbridas de motor adicionales.Monte el motor en el eje permitido siguiendo las instruccio-nes de montaje de la fijación del motor recomendada en elcatálogo.
25°
25°
50°
6xM3x6
ø 32
32°
4xM4x10
4xM3x7
ø32
ø36
4x90° 4
x90°
28°
4xM5x10
4X90°
45°
ø50
4xM5x10
4x90°
30°
ø40
MTR-DCI-32 MTR-DCI-42
MTR-DCI-52 MTR-DCI-62
Fig. 2/2: Fijación del accionamiento por medio de las roscas frontales (fijación directa)

Instalación
3-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Capítulo 3
Instalación
3. Instalación
3-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
3. Instalación 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Resumen de la instalación 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Conexión a tierra 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Alimentación 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Interface serie 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Entrada para el interruptor de referencia externa 3-12. . . . . . . . . . . . . . . . . . . . .
3.6 Conexión del control de nivel superior 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Instalación
3-3Festo P.BE-MTR-DCI-IO-ES es 1209d
3.1 Resumen de la instalación
AdvertenciaAntes de realizar trabajos de instalación o mantenimiento,desconecte siempre la alimentación de los componenteselectrónicos.
Con ello se evita:
– movimientos no deseados de actuadores conectados
– estados de conmutación indefinidos de los componenteselectrónicos.
AtenciónLos cables mal preconfeccionados pueden dañar los com-ponentes electrónicos y activar movimientos inesperadosdel motor.
• Para el cableado del sistema, utilice los cables indicadoscomo accesorios (véase Tab. 3/2). De esta forma se ase-gura el funcionamiento correcto del sistema.
AtenciónBajo ciertas circunstancias, los bucles a tierra pueden de-jar sin efecto las medidas de protección EMC, produciendoelevadas corrientes de compensación que pueden dañar elmotor (p.ej. por una fuente de alimentación defectuosa.
• Conecte sólo un apantallamiento de cable (cable de con-trol o cable de alimentación) al tierra funcional (FE).
La conexión GND no debe conectarse al cuerpo, al apantal-lamiento o al tierra funcional (FE)!
3. Instalación
3-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
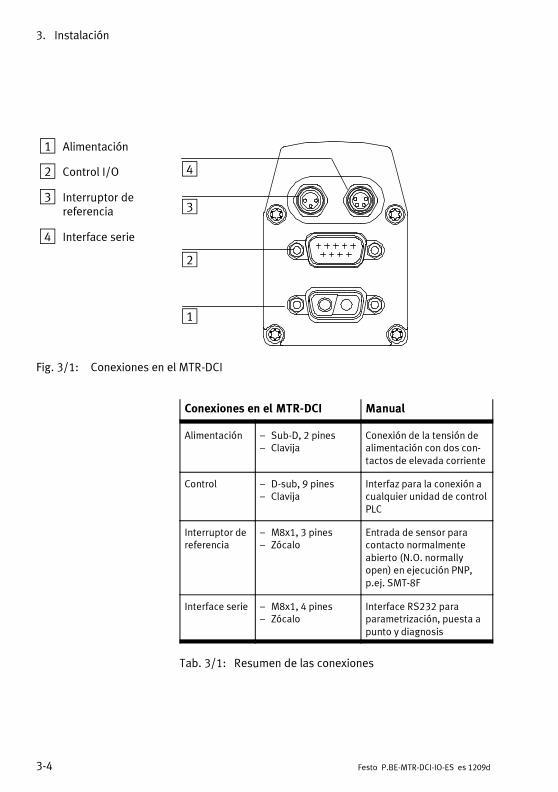
1 Alimentación
2 Control I/O
3 Interruptor dereferencia
4 Interface serie
1
2
3
4
Fig. 3/1: Conexiones en el MTR-DCI
Conexiones en el MTR-DCI Manual
Alimentación – Sub-D, 2 pines– Clavija
Conexión de la tensión dealimentación con dos con-tactos de elevada corriente
Control – D-sub, 9 pines– Clavija
Interfaz para la conexión acualquier unidad de controlPLC
Interruptor dereferencia
– M8x1, 3 pines– Zócalo
Entrada de sensor paracontacto normalmenteabierto (N.O. normallyopen) en ejecución PNP,p.ej. SMT-8F
Interface serie – M8x1, 4 pines– Zócalo
Interface RS232 paraparametrización, puesta apunto y diagnosis
Tab. 3/1: Resumen de las conexiones
3. Instalación
3-5Festo P.BE-MTR-DCI-IO-ES es 1209d
Si se tocan clavijas de conectores sin asignar, hay riesgo deque se produzcan daños en el MTR-DCI o otras partes delsistema, como resultado de la ESD (descarga electrostática).Coloque caperuzas protectoras en las conexiones no utiliza-das para evitar tales descargas.
Los racores rápidos de los cables de Festo indicados a conti-nuación se han diseñado de forma que tanto con racoresenchufados o enroscados como con tapas ciegas en las cone-xiones del MTR-DCI se cumple el tipo de protección IP54.
Conexión Cable Denominación Longitud [m]
Alimentación Cable de alimentación KPWR-MC-1-SUB-9HC 2,5 / 5 / 10
Control I/O Cable de mando KES-MC-1-SUB-9HC 2,5 / 5 / 10
Interfaz serie Cable de programación KDI-MC-M8-SUB-9 2,5
Interruptor de refe-rencia
Si es necesario, cable deconexión con enclavamien-to de rosca
KM8-M8-GSGD 0,5 / 1 / 2 / 5
Tab. 3/2: Cuadro general de cables (accesorios)
Para garantizar el cumplimiento del grado de protección IP:
• Tape las conexiones M8 sin utilizar con caperuzasprotectoras ISK-M8 (Accesorios).
• Apriete las tuercas de unión o los tornillos de bloqueo delos conectores. Observe los pares de apriete permisiblesen la documentación de los cables y conectores utiliza-dos.
Nota• Instale todos los cables móviles y cables de sensoreslibres de dobleces y de esfuerzos mecánicos, si esnecesario, en una cadena de arrastre.
• Observe las longitudes máximas especificadas de loscables.
3. Instalación
3-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
3.2 Conexión a tierra
Nota• Conecte la conexión de tierra del MTR-DCI con el poten-cial de tierra por medio de un cable de baja impedancia(cable corto con gran sección transversal).
De esta forma pueden evitarse fallos debidos a las influen-cias electromagnéticas y asegurar la compatibilidad elec-tromagnética según las directivas EMC.
Para la conexión del MTR-CDI al potencial de tierra utiliceexclusivamente la siguiente conexión de tierra:
– Cinta de puesta a tierra en el extremo libre del cable dealimentación, véanse las instrucciones para el montajedel cable KPWR-MC-1-SUB-9HC-...
AtenciónLos bucles de tierra o de masa pueden dejar sin efecto lasmedidas de seguridad EMC y dejar inservible el motordebido a las elevadas corrientes de compensación.
• Conecte solamente el apantallado del cable de alimen-tación a tierra funcional FE.
• La conexión GND no debe conectarse al cuerpo, al apan-tallamiento ni a la tierra funcional FE.
• Nunca conecte una de las conexiones de alimentaciónde corriente (véase el capítulo 3.2, A1, A2) a la FE ni alcuerpo.
Así se evitan los daños en el dispositivo y las influenciasde las funciones de protección de la EMC.
3. Instalación
3-7Festo P.BE-MTR-DCI-IO-ES es 1209d
3.3 Alimentación
Advertencia• Para la alimentación eléctrica, utilice sólo circuitos PELVsegún CEI/DIN EN 60204-1 (Protective Extra-LowVoltage, PELV).Tenga también en cuenta los requerimientos generalespara circuitos PELV según CEI/DIN EN 60204-1.
• Utilice sólo fuentes de alimentación que garanticen unaislamiento fiable de la tensión de alimentación segúnCEI/DIN EN 60204-1.
Al utilizar fuentes de alimentación PELV, se garantiza la pro-tección ante descargas eléctricas (protección contra contactodirecto e indirecto), según CEI/DIN EN 60204 (equipamientoeléctricos de máquinas requerimientos generales).
AtenciónDaños al dispositivo
La tensión de entrada del grupo motor no tiene especialprotección contra sobretensiones.
• Asegúrese de que nunca se sobrepasa la tolerancia detensión permisible. La tolerancia debe ser comprobadadirectamente en la conexión de la tensión de funcio-namiento del MTR-DCI (ver capítulo Tab. 3/3).
• Instale un fusible en la alimentación a DC 24 V paralimitar la intensidad (ver Tab. 3/4).

3. Instalación
3-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
La electrónica interna y la del controlador se alimentan contensión DC a través de la conexión de alimentación depotencia. La alimentación de potencia debe cumplir con lossiguientes requerimientos:
Especificaciones MTR-…-32 MTR-…-42 MTR-…-52 MTR-…-62
Tensión nominal DC 24 V ±10 % DC 48 V +5...-10 %
Intensidad nominal 0,73 A ±20 % 2 A ±20 % 5 A ±20 % 6,19 A ±20 %
Corriente de pico 2,1 A ±20 % 3,8 A ±20 % 7,7 A ±20 % 20 A ±20 %
Tab. 3/3: Alimentación
RecomendaciónUse una fuente de alimentación regulada con una ampliareserva de potencia y fusible externo:
MTR-…-32 MTR-…-42 MTR-…-52 MTR-…-62
Fuente de alimenta-ción (regulada)
DC 24 V /3 A DC 24 V/6 A DC 24 V/10 A DC 48 V/20 A
Fusibles externoslado secundario
5 A, fusión lenta 7 A, fusión lenta 10 A, fusión lenta 25 A, fusión lenta
Tab. 3/4: Selección de la fuente de alimentación
A1 A2
A1 A2
Fig. 3/2: Ejemplo de conexión – alimentación con fusibleexterno

3. Instalación
3-9Festo P.BE-MTR-DCI-IO-ES es 1209d
• Use el siguiente cable de los accesorios Festo:
– cable de alimentación KPWR-MC-1-SUB-9HC
– longitud máx. del cable 10 m.
• Conecte solamente un apantallado del cable (cable demando o cable de alimentación) a la tierra funcional (FE).
Clavija Pin Color 1) Manual
A2A1
A1 negro (1) MTR-DCI-32/42/52:MTR-DCI-62:
POWER DC +24 VPOWER DC +48 V
A2 negro (2) MTR-DCI-32/42/52/62: POWER GND 2)
1) Colores del cable de alimentación KPWR-MC-1-SUB-9HC2) La conexión GND no se debe conectar con la carcasa, el apantallamiento o la tierra funcional (FE).
Tab. 3/5: Conexión de la alimentación al grupo motor
3. Instalación
3-10 Festo P.BE-MTR-DCI-IO-ES es 1209d
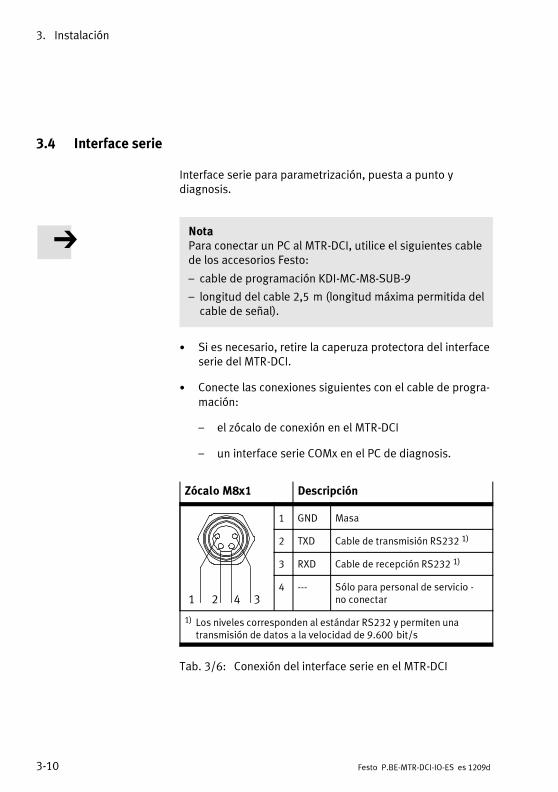
3.4 Interface serie
Interface serie para parametrización, puesta a punto ydiagnosis.
NotaPara conectar un PC al MTR-DCI, utilice el siguientes cablede los accesorios Festo:
– cable de programación KDI-MC-M8-SUB-9
– longitud del cable 2,5 m (longitud máxima permitida delcable de señal).
• Si es necesario, retire la caperuza protectora del interfaceserie del MTR-DCI.
• Conecte las conexiones siguientes con el cable de progra-mación:
– el zócalo de conexión en el MTR-DCI
– un interface serie COMx en el PC de diagnosis.
Zócalo M8x1 Descripción
1 2 4 3
1 GND Masa
2 TXD Cable de transmisión RS232 1)
3 RXD Cable de recepción RS232 1)
4 --- Sólo para personal de servicio -no conectar
1) Los niveles corresponden al estándar RS232 y permiten unatransmisión de datos a la velocidad de 9.600 bit/s
Tab. 3/6: Conexión del interface serie en el MTR-DCI
3. Instalación
3-11Festo P.BE-MTR-DCI-IO-ES es 1209d
La información sobre la puesta a punto y parametrización delMTR-DCI a través del interface serie puede hallarse en elcapítulo 5.3 y en el sistema de ayuda para el paquete desoftware FCT.La información sobre la transmisión de órdenes CI a travésdel interface serie puede hallarse en el apéndice B.1.2.
NotaLa interfaz RS232 no está eléctricamente aislado. No esadecuada para una conexión permanente a sistemas PC nicomo interfaz de control.
• Utilice esta conexión solamente para la puesta a punto.
• Desconecte el cable de programación durante el funcio-namiento permanente.
• Cierre la conexión con la tapa protectora suministrada(ISK-M8).
3. Instalación
3-12 Festo P.BE-MTR-DCI-IO-ES es 1209d
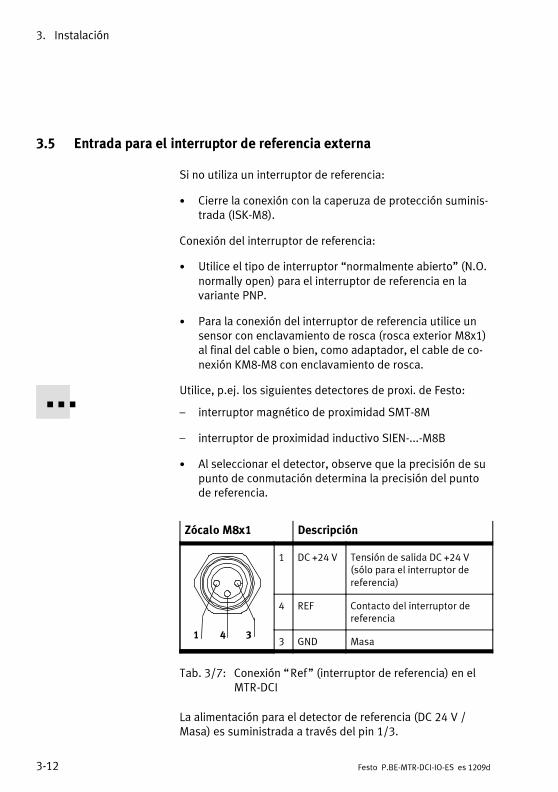
3.5 Entrada para el interruptor de referencia externa
Si no utiliza un interruptor de referencia:
• Cierre la conexión con la caperuza de protección suminis-trada (ISK-M8).
Conexión del interruptor de referencia:
• Utilice el tipo de interruptor “normalmente abierto” (N.O.normally open) para el interruptor de referencia en lavariante PNP.
• Para la conexión del interruptor de referencia utilice unsensor con enclavamiento de rosca (rosca exterior M8x1)al final del cable o bien, como adaptador, el cable de co-nexión KM8-M8 con enclavamiento de rosca.
Utilice, p.ej. los siguientes detectores de proxi. de Festo:
– interruptor magnético de proximidad SMT-8M
– interruptor de proximidad inductivo SIEN-...-M8B
• Al seleccionar el detector, observe que la precisión de supunto de conmutación determina la precisión del puntode referencia.
Zócalo M8x1 Descripción
1 34
1 DC +24 V Tensión de salida DC +24 V(sólo para el interruptor dereferencia)
4 REF Contacto del interruptor dereferencia
3 GND Masa
Tab. 3/7: Conexión “Ref” (interruptor de referencia) en elMTR-DCI
La alimentación para el detector de referencia (DC 24 V /Masa) es suministrada a través del pin 1/3.

3. Instalación
3-13Festo P.BE-MTR-DCI-IO-ES es 1209d
AtenciónDaños al dispositivo
La tensión de DC 24 V al pin 1 no tienen ninguna protec-ción especial contra sobrecargas; la tensión se toma de laalimentación principal con protección contra ESD y contrapolaridad incorrecta.
• Utilice esta conexión sólo para el interruptor de referen-cia (alimentación al detector).
No se permite utilizar esta conexión como alimentaciónpara otros dispositivos.
La entrada de la señal del sensor REF cumple en sus caracte-rísticas eléctricas con la especificación de las entradas en elapéndice “Especificaciones técnicas”.
3. Instalación
3-14 Festo P.BE-MTR-DCI-IO-ES es 1209d
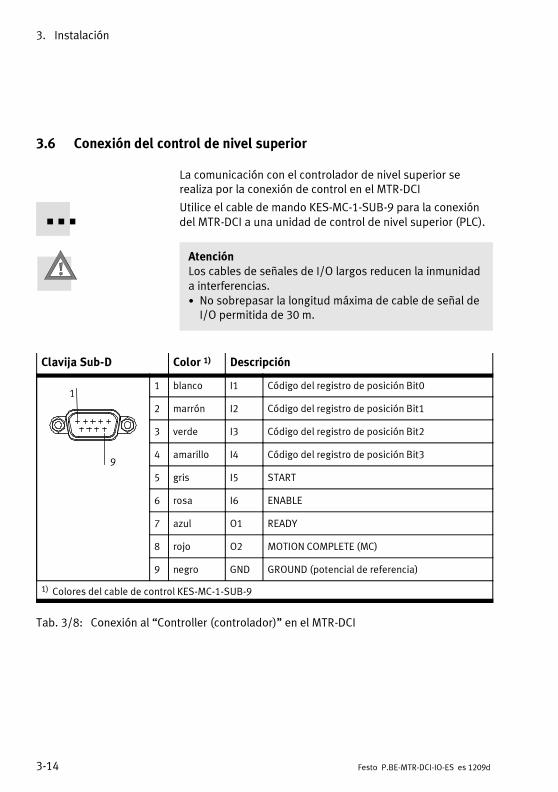
3.6 Conexión del control de nivel superior
La comunicación con el controlador de nivel superior serealiza por la conexión de control en el MTR-DCI
Utilice el cable de mando KES-MC-1-SUB-9 para la conexióndel MTR-DCI a una unidad de control de nivel superior (PLC).
AtenciónLos cables de señales de I/O largos reducen la inmunidada interferencias.• No sobrepasar la longitud máxima de cable de señal deI/O permitida de 30 m.
Clavija Sub-D Color 1) Descripción
1
9
1 blanco I1 Código del registro de posición Bit0
2 marrón I2 Código del registro de posición Bit1
3 verde I3 Código del registro de posición Bit2
4 amarillo I4 Código del registro de posición Bit3
5 gris I5 START
6 rosa I6 ENABLE
7 azul O1 READY
8 rojo O2 MOTION COMPLETE (MC)
9 negro GND GROUND (potencial de referencia)
1) Colores del cable de control KES-MC-1-SUB-9
Tab. 3/8: Conexión al “Controller (controlador)” en el MTR-DCI
3. Instalación
3-15Festo P.BE-MTR-DCI-IO-ES es 1209d
AdvertenciaSi se aplica tensión y los pines de salida están utilizadosincorrectamente, el dispositivo puede dañarse seriamente,por lo tanto:
• no debe conectarse tensión a las salidas.
• deben observarse los límites de corriente de las salidas.

3. Instalación
3-16 Festo P.BE-MTR-DCI-IO-ES es 1209d

Panel de control (MTR-DCI-...-H2IO)
4-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Capítulo 4
Panel de control (MTR-DCI-...-H2IO)
4. Panel de control (MTR-DCI-...-H2IO)
4-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
4. Panel de control (MTR-DCI-...-H2IO) 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Composición y función del panel de control 4-4. . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 El sistema de menú 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Acceso al menú principal 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Menú [Diagnostic] 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.3 Menú [Settings] 4-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.4 Menu [Positioning] 4-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.5 Orden de menú [HMI control] 4-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4. Panel de control (MTR-DCI-...-H2IO)
4-3Festo P.BE-MTR-DCI-IO-ES es 1209d
En el panel de control, el grupo motor MTR-DCI-...-H2 ofrecetodas las funciones necesarias para la puesta a punto, pro-gramación y diagnosis. Un resumen de las funciones de losbotones y el menú del MTR-DCI-...IO puede hallarse en estecapítulo. La puesta a punto con el panel de control de des-cribe a partir del capítulo 5.2.Con el MTR-DCI-...-R2 (sin panel de control) puede ponerse apunto el MTR-DCI a través del interface RS232 (con el soft-ware FCT). Las instrucciones sobre ello puede hallarse en elcapítulo 5.3.
AtenciónPueden producirse fallos si se intenta acceder a las funcio-nes de control y funcionamiento al mismo tiempo por elFCT y el panel de control.
• Asegúrese de que el FCT, el panel de control y el inter-face de control del MTR-DCI no se utilizan al mismotiempo.
NotaSi es necesario, retire la lámina protectora del displayantes de empezar la puesta a punto.
4. Panel de control (MTR-DCI-...-H2IO)
4-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
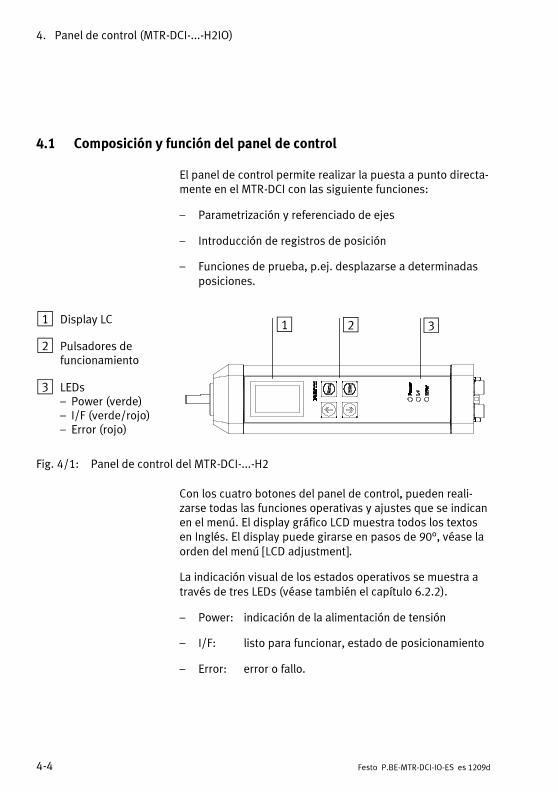
4.1 Composición y función del panel de control
El panel de control permite realizar la puesta a punto directa-mente en el MTR-DCI con las siguiente funciones:
– Parametrización y referenciado de ejes
– Introducción de registros de posición
– Funciones de prueba, p.ej. desplazarse a determinadasposiciones.
1 Display LC
2 Pulsadores defuncionamiento
3 LEDs– Power (verde)– I/F (verde/rojo)– Error (rojo)
1 32
Fig. 4/1: Panel de control del MTR-DCI-...-H2
Con los cuatro botones del panel de control, pueden reali-zarse todas las funciones operativas y ajustes que se indicanen el menú. El display gráfico LCD muestra todos los textosen Inglés. El display puede girarse en pasos de 90°, véase laorden del menú [LCD adjustment].
La indicación visual de los estados operativos se muestra através de tres LEDs (véase también el capítulo 6.2.2).
– Power: indicación de la alimentación de tensión
– I/F: listo para funcionar, estado de posicionamiento
– Error: error o fallo.

4. Panel de control (MTR-DCI-...-H2IO)
4-5Festo P.BE-MTR-DCI-IO-ES es 1209d
Función Botón
MENU Activado por la indicación del estadodesde el menú principal Menu
ESC Rechaza la entrada actual y regresa porpasos al nivel de menú de orden super-ior o a la indicación del estado
EMERG.STOP Interrumpe el procedimiento de posicio-nado en curso (> Error mode; confir-mar con <Enter>, luego regreso au-tomático a la indicación de estado).Sólo con HMI = on.
OK Confirma la selección o entrada actualEnter
SAVE Guarda los ajustes de parámetrospermanentemente en la EEPROM
START/STOP Inicia o detiene un procedimiento deposicionado (sólo en modo Demo). Trasla parada: Visualización de la posiciónactual, con <Menu> regreso al nivel demenú de orden superior.
<- -> Desliza dentro de un nivel de menú paraseleccionar una orden de menú. v
VEDIT Establece el parámetro
Tab. 4/1: Función de los botones (resumen)

MTR-DCI...
Xa = 0.00 mm
HMI:off
<Menu>
} Diagnostic
positioning
Settings
S ESC <Menu>
<--> OK <Enter>
} HMI control
LCD adjustment
v ESC <Menu>
<--> OK <Enter>
4. Panel de control (MTR-DCI-...-H2IO)
4-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
4.2 El sistema de menú
4.2.1 Acceso al menú principal
Cuando se enciende la tensión de alimentación, el MTR-DCIrealiza automáticamente una verificación interna. Primero eldisplay muestra el logo de Festo y luego cambia a la indica-ción del estado. La indicación de estado muestra la siguienteinformación:
– la denominación del tipo del MTR-DCI
– la posición actual del accionamiento xa = ...
– el ajuste actual del control del dispositivo(HMI = Human Machine Interface).
Se accede al menú principal desde la indicación de estadocon el botón <Menu>. La función actual del botón apareceráen las líneas inferiores del display LCD.
Función Botón
<- -> Con los botones de flecha en el panel de controlpuede seleccionar un elemento del menú a partirde la lista. La selección actual está marcada conuna flecha (} Diagnostic). Seleccione el ele-mento del menúS para visualizar otros elemen-tos de menú (HMI control...).
v
V
ESC Con <Menu> puede interrumpir la entradaactual y regresar en etapas al nivel superior demenú o a la indicación de estado.
Menu
OK Con <Enter> puede confirmar la selección oentrada actual. Enter
Tab. 4/2: Función de los botones (selección del menú)
4. Panel de control (MTR-DCI-...-H2IO)
4-7Festo P.BE-MTR-DCI-IO-ES es 1209d
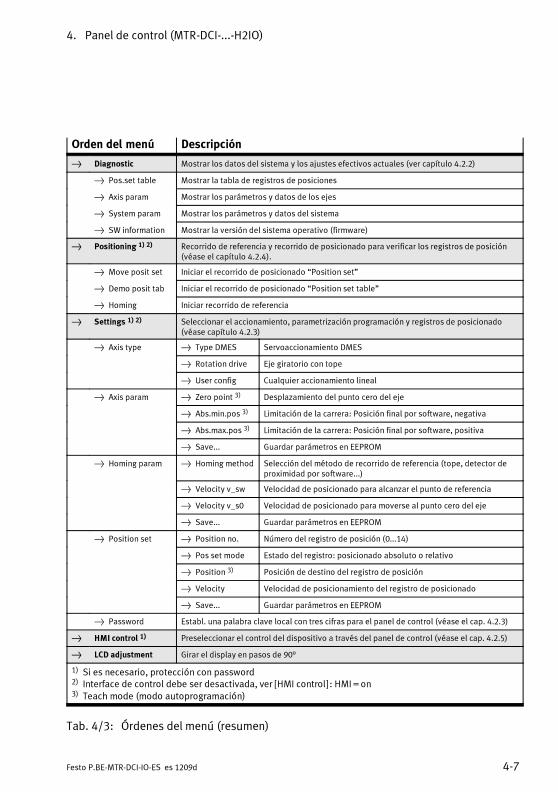
Orden del menú Descripción
} Diagnostic Mostrar los datos del sistema y los ajustes efectivos actuales (ver capítulo 4.2.2)
} Pos.set table Mostrar la tabla de registros de posiciones
} Axis param Mostrar los parámetros y datos de los ejes
} System param Mostrar los parámetros y datos del sistema
} SW information Mostrar la versión del sistema operativo (firmware)
} Positioning 1) 2) Recorrido de referencia y recorrido de posicionado para verificar los registros de posición(véase el capítulo 4.2.4).
} Move posit set Iniciar el recorrido de posicionado “Position set”
} Demo posit tab Iniciar el recorrido de posicionado “Position set table”
} Homing Iniciar recorrido de referencia
} Settings 1) 2) Seleccionar el accionamiento, parametrización programación y registros de posicionado(véase capítulo 4.2.3)
} Axis type } Type DMES Servoaccionamiento DMES
} Rotation drive Eje giratorio con tope
} User config Cualquier accionamiento lineal
} Axis param } Zero point 3) Desplazamiento del punto cero del eje
} Abs.min.pos 3) Limitación de la carrera: Posición final por software, negativa
} Abs.max.pos 3) Limitación de la carrera: Posición final por software, positiva
} Save... Guardar parámetros en EEPROM
} Homing param } Homing method Selección del método de recorrido de referencia (tope, detector deproximidad por software...)
} Velocity v_sw Velocidad de posicionado para alcanzar el punto de referencia
} Velocity v_s0 Velocidad de posicionado para moverse al punto cero del eje
} Save... Guardar parámetros en EEPROM
} Position set } Position no. Número del registro de posición (0...14)
} Pos set mode Estado del registro: posicionado absoluto o relativo
} Position 3) Posición de destino del registro de posición
} Velocity Velocidad de posicionamiento del registro de posicionado
} Save... Guardar parámetros en EEPROM
} Password Establ. una palabra clave local con tres cifras para el panel de control (véase el cap. 4.2.3)
} HMI control 1) Preseleccionar el control del dispositivo a través del panel de control (véase el cap. 4.2.5)
} LCD adjustment Girar el display en pasos de 90°
1) Si es necesario, protección con password2) Interface de control debe ser desactivada, ver [HMI control] : HMI=on3) Teach mode (modo autoprogramación)
Tab. 4/3: Órdenes del menú (resumen)
} Diagnostic
} Pos.set table
Axis param
System param
SW information
4. Panel de control (MTR-DCI-...-H2IO)
4-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
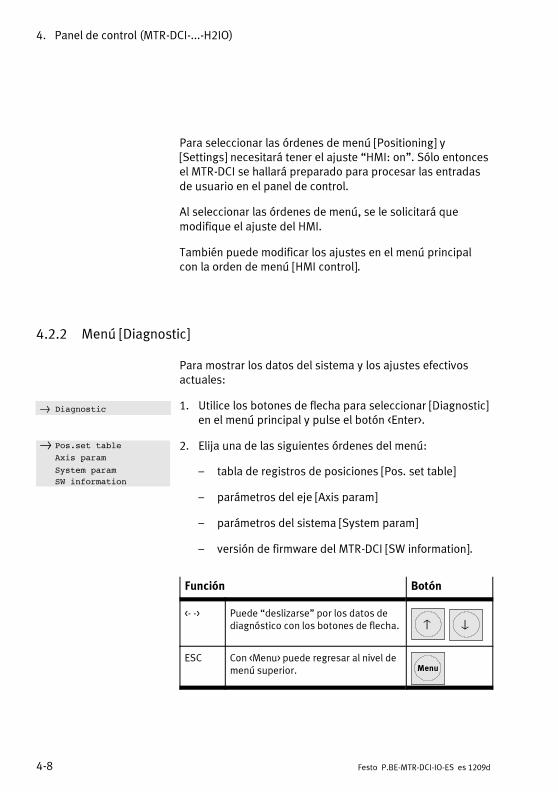
Para seleccionar las órdenes de menú [Positioning] y[Settings] necesitará tener el ajuste “HMI: on”. Sólo entoncesel MTR-DCI se hallará preparado para procesar las entradasde usuario en el panel de control.
Al seleccionar las órdenes de menú, se le solicitará quemodifique el ajuste del HMI.
También puede modificar los ajustes en el menú principalcon la orden de menú [HMI control].
4.2.2 Menú [Diagnostic]
Para mostrar los datos del sistema y los ajustes efectivosactuales:
1. Utilice los botones de flecha para seleccionar [Diagnostic]en el menú principal y pulse el botón <Enter>.
2. Elija una de las siguientes órdenes del menú:
– tabla de registros de posiciones [Pos. set table]
– parámetros del eje [Axis param]
– parámetros del sistema [System param]
– versión de firmware del MTR-DCI [SW information].
Función Botón
<- -> Puede “deslizarse” por los datos dediagnóstico con los botones de flecha. v V
ESC Con <Menu> puede regresar al nivel demenú superior. Menu
4. Panel de control (MTR-DCI-...-H2IO)
4-9Festo P.BE-MTR-DCI-IO-ES es 1209d
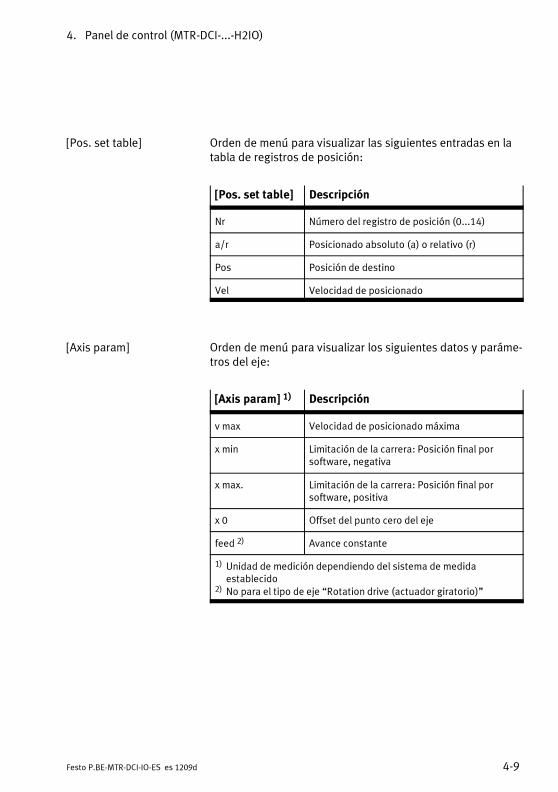
[Pos. set table] Orden de menú para visualizar las siguientes entradas en latabla de registros de posición:
[Pos. set table] Descripción
Nr Número del registro de posición (0...14)
a/r Posicionado absoluto (a) o relativo (r)
Pos Posición de destino
Vel Velocidad de posicionado
[Axis param] Orden de menú para visualizar los siguientes datos y paráme-tros del eje:
[Axis param] 1) Descripción
v max Velocidad de posicionado máxima
x min Limitación de la carrera: Posición final porsoftware, negativa
x max. Limitación de la carrera: Posición final porsoftware, positiva
x 0 Offset del punto cero del eje
feed 2) Avance constante
1) Unidad de medición dependiendo del sistema de medidaestablecido
2) No para el tipo de eje “Rotation drive (actuador giratorio)”
4. Panel de control (MTR-DCI-...-H2IO)
4-10 Festo P.BE-MTR-DCI-IO-ES es 1209d
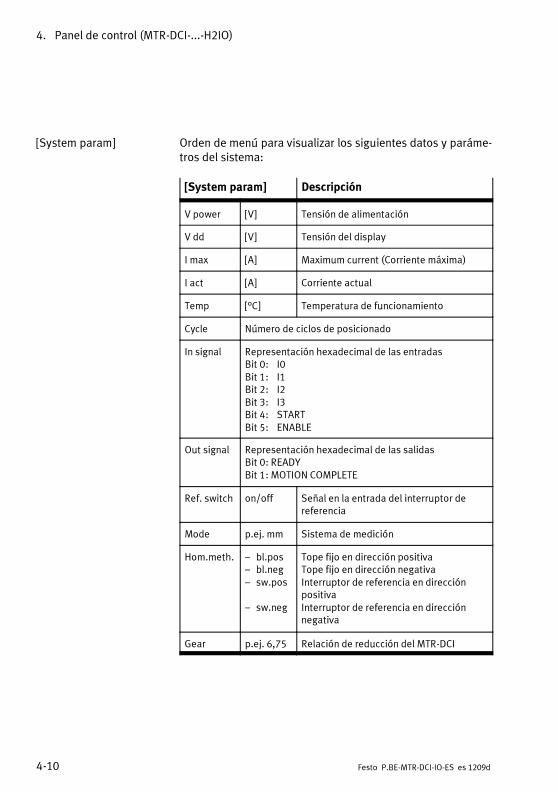
[System param] Orden de menú para visualizar los siguientes datos y paráme-tros del sistema:
[System param] Descripción
V power [V] Tensión de alimentación
V dd [V] Tensión del display
I max [A] Maximum current (Corriente máxima)
I act [A] Corriente actual
Temp [°C] Temperatura de funcionamiento
Cycle Número de ciclos de posicionado
In signal Representación hexadecimal de las entradasBit 0: I0Bit 1: I1Bit 2: I2Bit 3: I3Bit 4: STARTBit 5: ENABLE
Out signal Representación hexadecimal de las salidasBit 0: READYBit 1: MOTION COMPLETE
Ref. switch on/off Señal en la entrada del interruptor dereferencia
Mode p.ej. mm Sistema de medición
Hom.meth. – bl.pos– bl.neg– sw.pos
– sw.neg
Tope fijo en dirección positivaTope fijo en dirección negativaInterruptor de referencia en direcciónpositivaInterruptor de referencia en direcciónnegativa
Gear p.ej. 6,75 Relación de reducción del MTR-DCI
} Settings
} Axis type
Axis param
Homing param
Position set
Password
4. Panel de control (MTR-DCI-...-H2IO)
4-11Festo P.BE-MTR-DCI-IO-ES es 1209d
4.2.3 Menú [Settings]
AdvertenciaDaños o funcionamiento defectuoso de los componentesmecánicos.
Durante todos los procedimientos de Teach, el motor girao el eje conectado empieza a moverse.
• Asegúrese de que:
– nadie pueda poner su mano en el margen deposicionado
– no haya objetos en el margen de posicionado.
Para parametrizar el sistema de ejes y programar losregistros de posición:
1. Utilice los botones de flecha para seleccionar [Settings] enel menú principal y pulse el botón <Enter>.
2. Seleccione:
– el tipo de eje [Axis type]
– los parámetros del eje [Axis param]
– los parámetros del recorrido de referencia [Homingparam]
– la tabla de registros de posición [Position set]
– el ajuste de la palabra clave [Password].
[Axis type] Diseño del eje accionado por el MTR-DCI (parámetros, vercapítulo 5.2.1).
[Axis type] Descripción
[Type DMES-...] Servo-eje Festo
[Rotation drive] Eje de rotación específico
[User config] Eje lineal específico
[Save...] Guardar parámetros en EEPROM
4. Panel de control (MTR-DCI-...-H2IO)
4-12 Festo P.BE-MTR-DCI-IO-ES es 1209d
[Axis param] Modo teach para ajuste de los parámetros del eje
[Axis param] Descripción
[Zero point] Desplazamiento del punto cero del eje
[Abs.min.pos] Limitación de la carrera: Interruptor límite porsoftware, negativo
[Abs.max.pos] Limitación de la carrera: Interruptor límite porsoftware, positivo
[Save...] Guardar parámetros en EEPROM
NotaLos parámetros ajustados se hacen efectivos inmediata-mente tras la confirmación con OK <Enter>. Los ajustes songuardados permanentemente en EEPROM con la orden demenú [Save...]:
• Guarde los ajustes de parámetros con la orden de menú[Save]. Sólo entonces se retendrán los ajustes inclusoante la desconexión de la alimentación o si hay un fallode tensión.

4. Panel de control (MTR-DCI-...-H2IO)
4-13Festo P.BE-MTR-DCI-IO-ES es 1209d
[Homing param] Ajuste del método de recorrido de referencia y de las velo-cidades durante el recorrido de referencia.
La máxima velocidad durante el recorrido de referencia eslimitada a la mitad de la velocidad de posicionado máximav_max (v_max véase [Diagnostics] [Axis param] ).
[Hom. param] Param. Descripción
[Homing method] sw.neg(switch negative)
Puesta en origen alinterruptor de referencia,negativo = ajuste defábrica
sw.pos(switch positive)
Puesta en origen alinterruptor de referencia,positivo
bl.neg(block negative)
Puesta en origen a untope fijo, negativo
bl.pos(block positive)
Puesta en origen atope fijo, positivo
[Velocity v_sw] v_sw Velocidad para alcanzar elpunto de referencia
[Velocity v_s0] v_s0 Velocidad para moverse alpunto cero del eje
[Save...] Guardar parámetros en EEPROM
NotaLos parámetros ajustados se hacen efectivos inmediata-mente tras la confirmación con OK <Enter>. Los ajustes songuardados permanentemente en EEPROM con la orden demenú [Save...]:
• Guarde los ajustes de parámetros con la orden de menú[Save]. Sólo entonces se retendrán los ajustes inclusoante la desconexión de la alimentación o si hay un fallode tensión.
4. Panel de control (MTR-DCI-...-H2IO)
4-14 Festo P.BE-MTR-DCI-IO-ES es 1209d
[Position set] Modo Teach para programar la tabla de registros de posición.
[Position set] Param. Descripción
[Position nr.] Nr Número del juego de posición[0...14]
[Pos set mode] [absolute/relative]
Modo de posicionadoabsolute = especificación de posi-ción absoluta, relativa al puntocero del proyectorelative = especificación de posi-ción relativa, en relación con laposición actual
[Position] xt Posición de destino en el sistemade medición seleccionado, p.ej.[mm]
[Velocity] v Velocidad de posicionado en elsistema de medición seleccionado,p.ej. [mm/s]
[Save...] Guardar parámetros en EEPROM
NotaLos parámetros ajustados se hacen efectivos inmediata-mente tras la confirmación con OK <Enter>. Los ajustes songuardados permanentemente en EEPROM con la orden demenú [Save...]:
• Guarde los parámetros ajustados con [Save]. Sóloentonces se retendrán los ajustes incluso ante ladesconexión de la alimentación o si hay un fallo detensión.

New Password:
[?xx] =
ESC <menu>
EDIT <--> OK <Enter>
Enter password:
[?xx] =
ESC <menu>
EDIT <--> OK <Enter>
4. Panel de control (MTR-DCI-...-H2IO)
4-15Festo P.BE-MTR-DCI-IO-ES es 1209d
Ajuste de un password
Para evitar la sobreescritura o modificación no autorizada oinvoluntaria de parámetros del dispositivo, el acceso al panelde control puede ser protegido por una clave (local) o pass-word. De origen no hay especificado un password (ajustepredeterminado 000).
[Password] Seleccione [Settings] [Password] en el menú:
Introduzca un password de tres cifras. La posición actual deentrada está indicada por un signo de interrogación.
1. Use los botones de flecha para seleccionar una cifra 0...9.
2. Confirme su entrada con <Enter>. Se mostrará la siguienteposición de entrada.
3. Tras entrar la tercera cifra, guarde sus ajustes con SAVE<Enter>.
Entrar la clave (password)
Tan pronto como haya un password activado, será automáti-camente buscado cuando se acceda a las órdenes de menú[Positioning], [Settings] o [HMI control]. Una vez introducidoel password correcto, se habilitan todas las funciones de pa-rametrización y control del panel hasta que se desconecta latensión.
La posición actual de entrada está indicada por un signo deinterrogación.
1. Use los botones de flecha para seleccionar una cifra 0...9.
2. Confirme su entrada con <Enter>. Se mostrará la siguienteposición de entrada.
3. Repita la entrada para las siguientes posiciones.
Una vez entrada la tercera cifra, se habilita el acceso a travésdel panel de control.
Enter password:
[?xx] =
ESC <menu>
EDIT <--> OK <Enter>
New Password:
[?xx] =
ESC <menu>
EDIT <--> OK <Enter>
4. Panel de control (MTR-DCI-...-H2IO)
4-16 Festo P.BE-MTR-DCI-IO-ES es 1209d
Modificar/desactivar el password
[Password] Seleccione [Settings] [Password] en el menú:
Introduzca el password actual de tres cifras. La posición ac-tual de entrada está indicada por un signo de interrogación.
1. Use los botones de flecha para seleccionar una cifra 0...9.
2. Confirme su entrada con OK <Enter>. Se mostrará lasiguiente posición de entrada.
3. Repita la entrada para las siguientes posiciones.
4. Introduzca el password actual de tres cifras. Si deseadesactivar el password, introduzca “000”.
5. Tras entrar la tercera cifra, guarde sus ajustes con SAVE<Enter>.
• Guarde el password para el MTR-DCI en un lugar seguro,p.ej. en la documentación interna de su sistema.
Si el pasword activo en el MTR-DCI se perdiera, a pesar de lasprecauciones tomadas:puede borrarlo introduciendo un password master. En estecaso, póngase en contacto con el servicio técnico de Festo.
4. Panel de control (MTR-DCI-...-H2IO)
4-17Festo P.BE-MTR-DCI-IO-ES es 1209d
4.2.4 Menu [Positioning]
Inicie un recorrido de referencia recorrido de posicionadopara verificar los registros de posiciones.
AdvertenciaDaños o funcionamiento defectuoso de los componentesmecánicos
Durante todos los procedimientos de posicionado, elmotor gira o el eje conectado empieza a moverse.
• Asegúrese de que:
– nadie pueda poner su mano en el margen deposicionado
– no haya objetos en el margen de posicionado.
Nota• Antes de empezar un recorrido de referencia, asegúresede que:
– el sistema de posicionado se halla completamenteajustado, cableado y alimentado de tensión.
– la parametrización se ha completado.
• No empiece un recorrido de posicionado hasta que elsistema de referencia haya sido definido por medio deun recorrido de referencia.
NotaObserve que los registros de posición con velocidad v = 0o posiciones de destino inválidas (-> Error TARGETPOSITION OUT OF LIMIT) no pueden ser procesadas.

} Positioning
Move posit set
Demo posit tab
} Homing
...
Attention! Motor moves
ESC <menu>
START <Enter>
HOMING
V0 = 20 mm/s
v_sw = 10 mm/s
EMERG.STOP<Menu>
4. Panel de control (MTR-DCI-...-H2IO)
4-18 Festo P.BE-MTR-DCI-IO-ES es 1209d
Realice un recorrido de referencia
1. Utilice los botones de flecha para seleccionar [Positioning]en el menú principal y pulse el botón <Enter>.
2. Seleccione la orden del menú:
– Recorrido de referencia [Homing]
[Positioning] Descripción Nota
[Homing] Recorrido de referencia paradeterminar el sistema dereferencia mecánico
Primero ajuste el parámetro en el menú [Settings][Homing parameter].Ajustes de fábrica: Referencia al interruptor dereferencia en dirección negativa.
3. Asegúrese de que nadie pueda poner su mano en elmargen de posicionamiento de la masa móvil y de que nohaya obstáculos en su recorrido. Inicie el recorrido dereferencia con START <Enter>.
Se visualiza la siguiente información:
– la velocidad de búsqueda v_sw
– la velocidad de posicionado al punto cero del eje v_0.
Función
EMERG.STOP
Con <Menu> puede interrumpir el procedi-miento de posicionado en curso (> Errormode EMERG.STOP; confirme con <Enter>,luego hay un regreso automático a la indica-ción de estado).
Menu
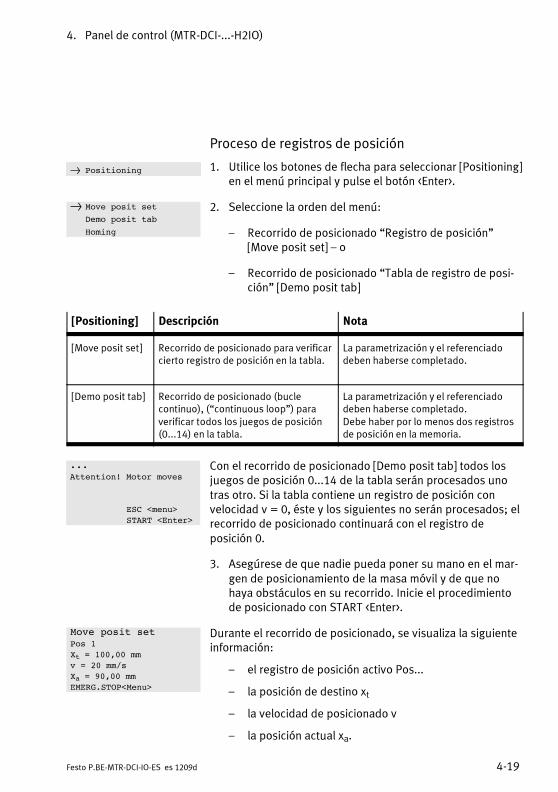
} Positioning
} Move posit set
Demo posit tab
Homing
...
Attention! Motor moves
ESC <menu>
START <Enter>
Move posit set
Pos 1
Xt = 100,00 mm
v = 20 mm/s
Xa = 90,00 mm
EMERG.STOP<Menu>
4. Panel de control (MTR-DCI-...-H2IO)
4-19Festo P.BE-MTR-DCI-IO-ES es 1209d
Proceso de registros de posición
1. Utilice los botones de flecha para seleccionar [Positioning]en el menú principal y pulse el botón <Enter>.
2. Seleccione la orden del menú:
– Recorrido de posicionado “Registro de posición”[Move posit set] – o
– Recorrido de posicionado “Tabla de registro de posi-ción” [Demo posit tab]
[Positioning] Descripción Nota
[Move posit set] Recorrido de posicionado para verificarcierto registro de posición en la tabla.
La parametrización y el referenciadodeben haberse completado.
[Demo posit tab] Recorrido de posicionado (buclecontinuo), (“continuous loop”) paraverificar todos los juegos de posición(0...14) en la tabla.
La parametrización y el referenciadodeben haberse completado.Debe haber por lo menos dos registrosde posición en la memoria.
Con el recorrido de posicionado [Demo posit tab] todos losjuegos de posición 0...14 de la tabla serán procesados unotras otro. Si la tabla contiene un registro de posición convelocidad v = 0, éste y los siguientes no serán procesados; elrecorrido de posicionado continuará con el registro deposición 0.
3. Asegúrese de que nadie pueda poner su mano en el mar-gen de posicionamiento de la masa móvil y de que nohaya obstáculos en su recorrido. Inicie el procedimientode posicionado con START <Enter>.
Durante el recorrido de posicionado, se visualiza la siguienteinformación:
– el registro de posición activo Pos...
– la posición de destino xt
– la velocidad de posicionado v
– la posición actual xa.
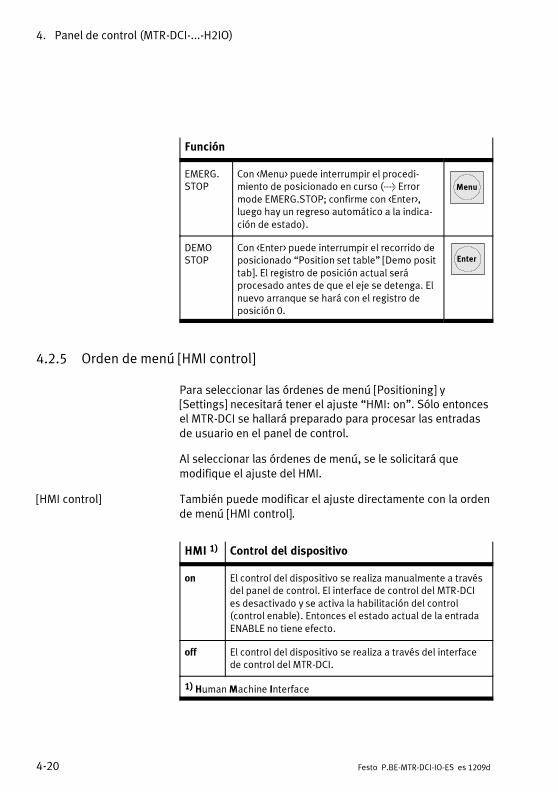
4. Panel de control (MTR-DCI-...-H2IO)
4-20 Festo P.BE-MTR-DCI-IO-ES es 1209d
Función
EMERG.STOP
Con <Menu> puede interrumpir el procedi-miento de posicionado en curso (> Errormode EMERG.STOP; confirme con <Enter>,luego hay un regreso automático a la indica-ción de estado).
Menu
DEMOSTOP
Con <Enter> puede interrumpir el recorrido deposicionado “Position set table” [Demo posittab]. El registro de posición actual seráprocesado antes de que el eje se detenga. Elnuevo arranque se hará con el registro deposición 0.
Enter
4.2.5 Orden de menú [HMI control]
Para seleccionar las órdenes de menú [Positioning] y[Settings] necesitará tener el ajuste “HMI: on”. Sólo entoncesel MTR-DCI se hallará preparado para procesar las entradasde usuario en el panel de control.
Al seleccionar las órdenes de menú, se le solicitará quemodifique el ajuste del HMI.
[HMI control] También puede modificar el ajuste directamente con la ordende menú [HMI control].
HMI 1) Control del dispositivo
on El control del dispositivo se realiza manualmente a travésdel panel de control. El interface de control del MTR-DCIes desactivado y se activa la habilitación del control(control enable). Entonces el estado actual de la entradaENABLE no tiene efecto.
off El control del dispositivo se realiza a través del interfacede control del MTR-DCI.
1) HumanMachine Interface

Puesta a punto
5-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Capítulo 5
Puesta a punto
5. Puesta a punto
5-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
5. Puesta a punto 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Procedimiento para la puesta a punto 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Puesta a punto con el panel de control (sólo MTR-DCI-...-H2...) 5-6. . . . . . . . . .
5.2.1 Selección del tipo de eje 5-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.2 Ajuste de los parámetros del recorrido de referencia 5-9. . . . . . . . . . .
5.2.3 Programación (por Teach) del punto cero del eje yde las posiciones finales por software 5-13. . . . . . . . . . . . . . . . . . . . . . .
5.2.4 Posicionamiento con registros de posicionado 5-15. . . . . . . . . . . . . . . .
5.2.5 Programación (por Teach) de los registros de posición 5-16. . . . . . . . .
5.2.6 Ciclo de prueba 5-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Puesta a punto con FCT 5-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Instalación del FCT 5-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Procedimiento para la puesta a punto conel Festo Configuration Tool 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Comunicación con controlador de nivel superior 5-22. . . . . . . . . . . . . . . . . . . . . .
5.4.1 Prueba de funcionamiento de las I/O 5-22. . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Descripción de las I/Os 5-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3 Descripción de la función (diagrama de pulsos-tiempo) 5-26. . . . . . . .
5. Puesta a punto
5-3Festo P.BE-MTR-DCI-IO-ES es 1209d
5.1 Procedimiento para la puesta a punto
AdvertenciaRiesgo de lesiones.
Los ejes eléctricos pueden moverse inesperadamente confuerzas elevadas y altas velocidades. Las colisionespueden causar lesiones graves a las personas y dañosmateriales.
• Asegúrese de que nadie pueda acceder al margenoperativo de los ejes o de los actuadores conectados yde que no haya objetos en el recorrido del eje mientrasel sistema se halle conectado a la alimentación decorriente (tensión).
NotaEn los siguientes casos, no está permitido acceder alMTR-DCI con la opción de escritura del FCT (p.ej. descargade parámetros) o de control (p.ej. con “Move manually” ocuando se ha iniciado el recorrido de referencia):
– Cuando el MTR-DCI se halla realizando un movimientode posicionado o cuando se ha iniciado un movimientodurante el acceso (p.ej. a través del interface de controlo del panel de control).
– Cuando el funcionamiento o la parametrización se reali-zan desde el panel de control del MTR-DCI.
Por favor, observar lo siguiente:
• La conexión al dispositivo en el FCT, no debe ser acti-vada cuando el panel de control está siendo utilizadapara el control (“HMI control = on”).
• El control con el panel de control (“HMI control = on”) nodebe ser activado cuando está activada la conexión aldispositivo en el FCT.
• El control por el FCT no debe ser activado mientras elaccionamiento se halla en movimiento o cuando se estárealizando el control a través de las I/Os.

5. Puesta a punto
5-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
Antes de la puesta a punto
• Antes poner a punto el servoaccionamiento, asegúrese deque:
– el espacio de trabajo es de tamaño suficiente para elfuncionamiento con la carga,
– la carga no colisiona con el motor o el reductor del ejecuando éste se desplaza a la posición final.
• Tenga en cuenta las notas en las instrucciones de funcio-namiento del accionamiento.
Reacción al arranque
Primera puesta a punto Directamente después de la puesta en marcha se puedenejecutar movimientos de posicionamiento relativos, p. ej.para posicionar el eje en el margen de posicionamiento per-mitido. Si se inicia un posicionado absoluto, aparecerá elsiguiente error: LAST ACTUAL POSITION IS NOT SAVED! PLEA-SE ENFORCE HOMING RUN. Los movimientos de posiciona-miento absolutos solo pueden realizarse tras un recorrido dereferencia.
• Después de cada puesta en marcha es necesario ejecutarun recorrido de referencia. Véase el método del recorridode referencia en el capítulo 1.5.3.

5. Puesta a punto
5-5Festo P.BE-MTR-DCI-IO-ES es 1209d
Puesta en marcha
NotaDebe respetarse la tolerancia de la tensión de alimenta-ción. La tolerancia debe ser comprobada también directa-mente en la conexión de la tensión de funcionamiento delMTR-DCI (véase capítulo 3.3).
Nota• Asegúrese de que el eje se halla dentro del margen deposicionamiento permitido cuando se pone en marcha.Las instrucciones sobre ello puede hallarse en el capí-tulo 1.5.1.
• Cuando se desconecte la tensión de alimentación,espere unos 5 segundos antes de conectar de nuevo eldispositivo.
• Aplicar la tensión de funcionamiento al MTR-DCI.Cuando se enciende la tensión de alimentación, elMTR-DCI realiza automáticamente una verificacióninterna.
• Realice la parametrización y la puesta a punto con elpanel de control o el FCT, como se describe en lossiguientes capítulos o en la ayuda del FCT/PlugIn.
• Para completar la puesta a punto observe las instruccio-nes para el funcionamiento en la ayuda del FCT/PlugIn yen el capítulo 6.1.
Diagnostic
Positioning
Settings
} HMI control
LCD adjustment
5. Puesta a punto
5-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
5.2 Puesta a punto con el panel de control (sólo MTR-DCI-...-H2...)
La información sobre las funciones de los botones y sobre lacomposición del menú del panel de control puede hallarse enel capítulo 4.
Control del dispositivo
Para que el panel de control pueda controlar el MTR-DCIconectado, el interface de control del MTR-DCI debe estardesactivado y debe estar activada la habilitación delcontrolador [HMI = on]. Entonces el estado actual de laentrada ENABLE no tiene efecto.
Instrucciones sobre la puesta a punto yparametrizaciónLa información sobre la parametrización actual del grupomotor puede hallarse en el menú [Diagnostic] en el panel decontrol.
Para poner a punto por primera vez el MTR-DCI con el panelde control realice los siguientes pasos: Observe la descrip-ción detallada en los capítulos especificados.
Puesta a punto (cuadro general) Cap.
1. Seleccione el tipo de eje y, si es necesario, adapte laparametrización a los ejes.
5.2.1
2. Ajuste los siguientes parámetros para el recorrido dereferencia:– Método del recorrido de referencia– Velocidad de búsqueda al punto de referencia– Velocidad de posicionado al punto cero del eje
5.2.2
3. Realice un recorrido de referencia. 5.2.2
4. Programe (por Teach) los siguientes parámetros de ejespara definir el punto cero del eje y la zona de trabajo:– Desplazamiento del punto cero del eje al punto de
referencia– Posiciones finales por software positivas y negativas.
5.2.3
} Settings
Axis type
Type DMES...
Rotation drive
User config
5. Puesta a punto
5-7Festo P.BE-MTR-DCI-IO-ES es 1209d
Puesta a punto (cuadro general) Cap.
5. Entre varios registros de posiciones (posición de destino,modo de posicionado y velocidad de posicionado).
6. Realice un funcionamiento de prueba para verificar lareacción del posicionado del eje, así como lascoordenadas de base y la zona de trabajo.
7. Si es necesario, optimice los ajustes para los registros deposición así como para las coordenadas de base y lazona de trabajo.
5.2.4
8. Verifique la función del interface de control del MTR-DCI(prueba de función).
5.4.1
9. Antes de finalizar la puesta a punto, observe lasinstrucciones sobre el funcionamiento.
6.1
Tab. 5/1: Puesta a punto (cuadro general)
Puede restablecer los ajustes predeterminados, si es necesa-rio, borrando directamente la EEPROM a través del interfaceserie con la orden CI 20F1 (Data memory control) (véase elapéndice B.1.2).
5.2.1 Selección del tipo de eje
1. Seleccione el tipo de eje que se ajuste a su sistema deposicionamiento.
– Eje de posicionamiento Festo [Type DMES-...]
– Eje de rotación [Rotation drive]
– Eje lineal [User config].
2. Según la entrada solicitada, establezca los parámetrosespecíficos del eje por medio de las teclas de flecha:
– avance constante (Feedcon) o
– sistema de medición (Degree/Revolutions).
3. Guarde los ajustes con SAVE <Enter>.

5. Puesta a punto
5-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
Tipo de eje Avance constante[mm/revolución]
Sistema demedición
Ejes de posicionadoFesto 1) 2)
DMES-18 1,5 Métrico 3)
DMES-25 2,5
DMES-40 4
DMES-63 6
Eje de rotación — Grado orevoluciones
Eje lineal 2) Según la placa de tipoo las especificacionestécnicas del eje
Métrico 3)
1) Valores definidos en fábrica Z paso del husillo del eje [mm]2) Si se utiliza un reductor externo la relación de reducción debe
ajustarse con FCT.3) Pre-ajuste métrico; las pulgadas sólo pueden ajustarse con
FCT.
Tab. 5/2: Parametrización de los ejes
5. Puesta a punto
5-9Festo P.BE-MTR-DCI-IO-ES es 1209d
5.2.2 Ajuste de los parámetros del recorrido de referencia
AtenciónDaños a componentes
La corredera sólo puede chocar contra un tope fijo si no sesobrepasa la energía de impacto permitida. El valor permi-tido puede hallarse en el manual de su eje de posicionado.
Energía del impacto = 0,5 x masa x velocidad2
Para la protección de componentes mecánicos:
• Reduzca la velocidad a la cual se realiza el recorrido dereferencia. La velocidad puede ser especificada del 0 %al 50 % de la velocidad nominal, según la aplicaciónespecífica.
• Si es necesario, limitar la intensidad del motor duranteel recorrido de referencia con el software FCT. La intensi-dad del motor puede especificarse del 1 al 200 % de laintensidad nominal del motor, según la aplicación espe-cífica (ver ayuda FCT/PlugIn MTR-DCI).
AtenciónAl cambiar el método de referencia, el desplazamiento delpunto cero del eje se repone a cero. Los ajustes existentespara las posiciones finales por software y para las posicio-nes de destino de la tabla de frases de posicionamiento semantienen. Tenga en cuenta que estos valores se refierenal anterior punto cero del eje.
• Después de modificar el método de recorrido de refe-rencia debe realizarse siempre un recorrido de referen-cia.
• Luego establezca el desplazamiento del punto cero deleje mediante programación tipo teach-in.
Si se modifica el punto cero del eje:
• Vuelva a programar por teach-in las posiciones finalespor software y las posiciones de destino.
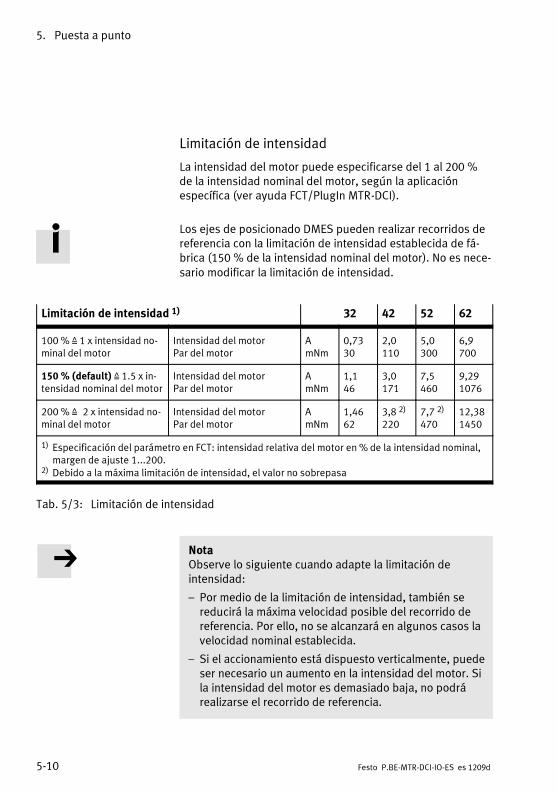
5. Puesta a punto
5-10 Festo P.BE-MTR-DCI-IO-ES es 1209d
Limitación de intensidad
La intensidad del motor puede especificarse del 1 al 200 %de la intensidad nominal del motor, según la aplicaciónespecífica (ver ayuda FCT/PlugIn MTR-DCI).
Los ejes de posicionado DMES pueden realizar recorridos dereferencia con la limitación de intensidad establecida de fá-brica (150 % de la intensidad nominal del motor). No es nece-sario modificar la limitación de intensidad.
Limitación de intensidad 1) 32 42 52 62
100 % Z 1 x intensidad no-minal del motor
Intensidad del motorPar del motor
AmNm
0,7330
2,0110
5,0300
6,9700
150 % (default) Z 1.5 x in-tensidad nominal del motor
Intensidad del motorPar del motor
AmNm
1,146
3,0171
7,5460
9,291076
200 % Z 2 x intensidad no-minal del motor
Intensidad del motorPar del motor
AmNm
1,4662
3,8 2)
2207,7 2)
47012,381450
1) Especificación del parámetro en FCT: intensidad relativa del motor en% de la intensidad nominal,margen de ajuste 1...200.
2) Debido a la máxima limitación de intensidad, el valor no sobrepasa
Tab. 5/3: Limitación de intensidad
NotaObserve lo siguiente cuando adapte la limitación deintensidad:
– Por medio de la limitación de intensidad, también sereducirá la máxima velocidad posible del recorrido dereferencia. Por ello, no se alcanzará en algunos casos lavelocidad nominal establecida.
– Si el accionamiento está dispuesto verticalmente, puedeser necesario un aumento en la intensidad del motor. Sila intensidad del motor es demasiado baja, no podrárealizarse el recorrido de referencia.
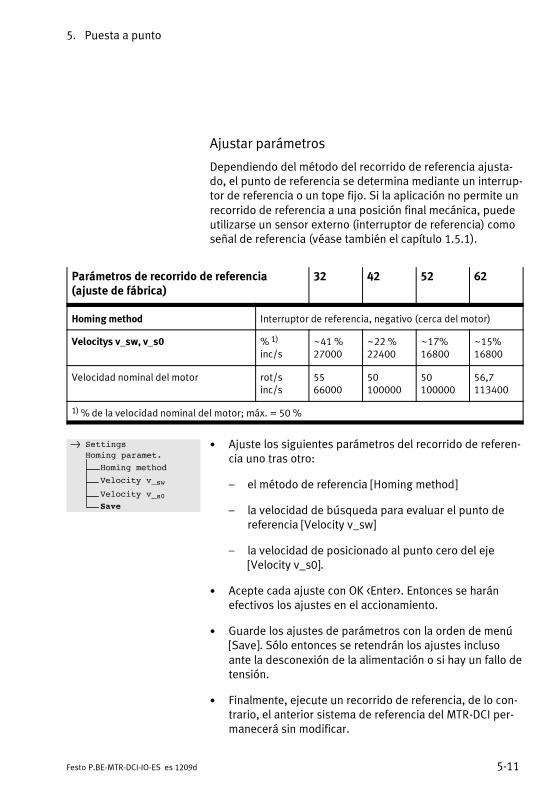
} Settings
Homing paramet.
Homing method
Velocity v_sw
Velocity v_s0
Save
5. Puesta a punto
5-11Festo P.BE-MTR-DCI-IO-ES es 1209d
Ajustar parámetros
Dependiendo del método del recorrido de referencia ajusta-do, el punto de referencia se determina mediante un interrup-tor de referencia o un tope fijo. Si la aplicación no permite unrecorrido de referencia a una posición final mecánica, puedeutilizarse un sensor externo (interruptor de referencia) comoseñal de referencia (véase también el capítulo 1.5.1).
Parámetros de recorrido de referencia(ajuste de fábrica)
32 42 52 62
Homing method Interruptor de referencia, negativo (cerca del motor)
Velocitys v_sw, v_s0 % 1)
inc/s~41 %27000
~22 %22400
~17%16800
~15%16800
Velocidad nominal del motor rot/sinc/s
5566000
50100000
50100000
56,7113400
1)%de la velocidad nominal del motor; máx. = 50 %
• Ajuste los siguientes parámetros del recorrido de referen-cia uno tras otro:
– el método de referencia [Homing method]
– la velocidad de búsqueda para evaluar el punto dereferencia [Velocity v_sw]
– la velocidad de posicionado al punto cero del eje[Velocity v_s0].
• Acepte cada ajuste con OK <Enter>. Entonces se haránefectivos los ajustes en el accionamiento.
• Guarde los ajustes de parámetros con la orden de menú[Save]. Sólo entonces se retendrán los ajustes inclusoante la desconexión de la alimentación o si hay un fallo detensión.
• Finalmente, ejecute un recorrido de referencia, de lo con-trario, el anterior sistema de referencia del MTR-DCI per-manecerá sin modificar.
5. Puesta a punto
5-12 Festo P.BE-MTR-DCI-IO-ES es 1209d
Inicio del recorrido de referencia
NotaCuando realice el recorrido de referencia observe que:
– el actuador debe hallarse en el margen de posiciona-miento permitido,
– el actuador se mueve en el sentido de la búsqueda se-gún el método del recorrido de referencia seleccionadoy durante el arranque debe hallarse delante del tope fijoo del interruptor de referencia.
1. Posicione el actuador en el modo Teach, de forma quedurante el arranque se encuentre en el sentido de la bús-queda delante del tope fijo o del interruptor de referen-cia.
• Seleccione p.ej. [Settings] [Position set] [Position](véase también el capítulo 5.2.5).
• Mueva el actuador manualmente a la posicióndeseada con los botones de flecha.
• Interrumpa el procedimiento con ESC <Menu>, paraque la posición no sea incluida en la tabla de registrosde posiciones.
2. Seleccione [Positioning] [Homing].
3. Inicie el recorrido de referencia con START <Enter>.
Tras un recorrido de referencia correcto, el actuador perma-nece en el punto cero del eje. Con la primera puesta a puntoo tras un cambio del método del recorrido de referencia, eldesplazamiento del punto cero del eje es = 0; tras el recorri-do de referencia el actuador se detiene en el punto de refe-rencia (= punto cero del eje).
} Positioning
Demo posit tab
Move posit set
Homing
5. Puesta a punto
5-13Festo P.BE-MTR-DCI-IO-ES es 1209d
Interrupción del recorrido de referencia
Si es necesario, el recorrido de referencia puede interrum-pirse con la tecla <Menu> (EMERG STOP). Si se interrumpe elrecorrido de referencia, el display mostrará el mensaje defallo HOMING ERROR. Si ya se ha realizado un recorrido dereferencia correcto, el punto de referencia previo mantendrásu validez.
• Elimine el mensaje de error con <Enter>.
• Repita el recorrido de referencia.
Fallo en el recorrido de referencia
Si se produce un fallo durante el recorrido de referencia:
• Elimine el mensaje de error con <Enter>.
• Si es necesario, verifique la función de los detectores dereferencia.
• Verifique los ajustes de los parámetros.
• Posicione el actuador en el modo Teach, de forma que alinicio en la dirección de búsqueda quede en frente deltope o interruptor de referencia.
• Repita el recorrido de referencia.
5.2.3 Programación (por Teach) del punto cero del eje y de las posicionesfinales por software
Requisitos para la programación (por Teach) del punto cerodel eje y de las posiciones finales por software:
– El recorrido de referencia finalizó con éxito.
NotaCon referencia al tope, ajuste el desplazamiento (offset)del punto cero del eje ≠ 0. Con ello evitará el movimiento alas posicione finales mecánicas durante el funcionamiento.
5. Puesta a punto
5-14 Festo P.BE-MTR-DCI-IO-ES es 1209d
Programe (por Teach) el punto cero del eje:
1. Seleccione [Settings] [Axis parameter] [Zero point].
2. Mueva el actuador manualmente al punto cero del ejedeseado con los botones de flecha.
3. Acepte la posición alcanzada con OK <Enter>. Entonces seharán efectivos los ajustes en el accionamiento. La posi-ción actual xa se convierte en el punto cero del eje (xa = 0).
NotaSi se modifica el punto cero del eje:
Verifique los ajustes existentes de las posiciones finalespor software y de las posiciones de destino en la tabla deposiciones. Observe que estos valores se refieren al ante-rior punto cero del eje.
• Establezca de nuevo (por Teach) las posiciones finalespor software y las posiciones de destino.
Establezca las posiciones finales negativa y positiva porsoftware:
1. Seleccione [Settings] [Axis parameter] [Abs.min.pos] or[Abs.max.pos].
2. Mueva el actuador manualmente con los botones deflecha.
3. Acepte la posición alcanzada con OK <Enter>. Entonces seharán efectivos los ajustes en el accionamiento.
4. Guarde los parámetros ajustados con [Save]. Sólo enton-ces se retendrán los ajustes incluso ante la desconexiónde la alimentación o si hay un fallo de tensión.
} Settings
Axis parameter
Zero point
Abs.min.pos
Abs.max.pos
Save
5. Puesta a punto
5-15Festo P.BE-MTR-DCI-IO-ES es 1209d
5.2.4 Posicionamiento con registros de posicionado
AdvertenciaDaños o funcionamiento defectuoso de los componentesmecánicos
Durante todos los procedimientos de posicionado, elmotor gira o el eje conectado empieza a moverse.
• Asegúrese de que:
– nadie pueda poner su mano en el margen deposicionado
– no haya objetos en el margen de posicionado.
Deben cumplirse las siguientes condiciones:
– El recorrido de referencia finalizó con éxito.
– El punto cero del eje y las posiciones finales por softwareestán correctamente establecidas.
NotaObserve que los registros de posición con velocidad v = 0o posiciones de destino inválidas (-> Error TARGETPOSITION OUT OF LIMIT) no pueden ser procesadas.
• Tras un recorrido de referencia con éxito, programe variosregistros de posición (ver capítulo 5.2.5).
• Realice primero un funcionamiento de prueba, si esnecesario, sin carga de trabajo (ver capítulo 5.2.6).
• Si es necesario, optimice los ajustes para los registros deposición así como para las coordenadas de referencia y elárea de trabajo (ver capítulo 5.2).
• Tras un funcionamiento de prueba correcto, se puedenprogramar (por Teach) en la tabla de registros de posicio-nes para qué movimiento debe hacerse.
5. Puesta a punto
5-16 Festo P.BE-MTR-DCI-IO-ES es 1209d
5.2.5 Programación (por Teach) de los registros de posición
Introduzca los registros de posición como sigue:
1. Active la posición deseada (0...14) con [Settings][Position set] [Position nr].
2. Complete o corrija el modo de posicionado del registro deposición:
• Seleccione [Pos set mode].
• Establezca el modo de posicionado con los botonesde flechas:absolute = especificación de posición absoluta,
relativa al punto cero del proyectorelative = especificación de posición relativa, en
relación con la posición actual.
• Acepte el valor con OK <Enter>.
NotaTras cada cambio del modo de posicionado, programe laposición de destino del registro de posición, de lo contra-rio no se aceptará el cambio del modo de posicionado.
3. Programe (por Teach) la posición de destino del registrode posición:
• Seleccione [Position]
• Mueva el actuador manualmente a la posicióndeseada con los botones de flecha.
• Acepte la posición alcanzada con OK <Enter>. El ajustede la posición de destino y el modo de posicionadoserá entonces efectivo en el actuador.
4. Complete o corrija la velocidad.
• Seleccione [Velocity]
} Settings
Position set
Position nr
Pos set mode
Position
Velocity
Save
5. Puesta a punto
5-17Festo P.BE-MTR-DCI-IO-ES es 1209d
• Establezca la velocidad nominal con los botones deflechas:
• Acepte el ajuste con OK <Enter>. Entonces se haránefectivos los ajustes en el accionamiento.
5. Guarde el juego de posición con [Save]. Sólo entonces seretendrán los ajustes incluso ante la desconexión de laalimentación o si hay un fallo de tensión.
6. Introduzca el siguiente registro de posición.
Los fallos del conversor analógico-digital pueden acumularseen caso de movimientos de posicionado relativos que se pro-ducen frecuentemente uno tras otro y que provocan desvia-ciones de los valores de posición. Si es necesario, inserte unregistro de posición absoluto o recorrido de referencia en elciclo de posicionado, para corregir las desviaciones.
5.2.6 Ciclo de prueba
AtenciónDaños a componentes
Durante el funcionamiento no está permitido desplazarse alas posiciones mecánicas finales (topes). Si se hace unmovimiento a las posiciones finales con una carga elevada,las posiciones finales pueden bloquearse.
• Establezca el desplazamiento (offset) del punto cero ≠ 0.
• Limite el margen de posicionado definiendo unas posi-ciones finales por software durante la puesta a punto(véase capítulo 1.5.1).
• Especifique las posiciones de destino sólo dentro delmargen de posicionado permitido.
5. Puesta a punto
5-18 Festo P.BE-MTR-DCI-IO-ES es 1209d
1. Introduzca varios registros de posición para verificar lareacción del posicionado (véase capítulo 5.2.5).
• Establezca las posiciones de destino en los límites delmargen de posicionado para verificar las posicionesfinales por software.
• Establezca diferentes velocidades.
2. Seleccione [Positioning] [Move posit set] para procesar undeterminado registro de posición, o
3. Seleccione [Positioning] [Demo posit tab] para procesartodos los juegos de posición. Hay que introducir por lomenos dos registros de posición en la tabla.
Con el recorrido de posicionado [Demo posit tab] todoslos juegos de posición 0...14 de la tabla serán procesadosuno tras otro.
Si la tabla contiene un registro de posición con velocidadv = 0, ni éste ni los siguientes serán procesados; el reco-rrido de posicionado continuará con el registro de posi-ción 0.
Con DEMO STOP <Enter> puede interrumpir el ciclo de posicio-nado [Demo posit tab]. El registro de posición actual seráprocesado antes de que el eje se detenga.
4. Inicie un funcionamiento de prueba.
• Compruebe la reacción de posicionado.
• Verifique las coordenadas visualizadas del eje.
Con el <Menu> EMERG.STOP puede interrumpir el actualprocedimiento de posicionado.
5. Si es necesario, optimice los ajustes para los registros deposición así como para las coordenadas de base y la zonade trabajo.
} Positioning
Demo posit tab
Move posit set
Homing
5. Puesta a punto
5-19Festo P.BE-MTR-DCI-IO-ES es 1209d
5.3 Puesta a punto con FCT
5.3.1 Instalación del FCT
NotaEl PlugIn MTR-DCI versión V1.1.0 soporta los siguientesgrupos motor del MTR-DCI-...IO:
– MTR-DCI-32...: Versión de firmware V-DME 1.20
– MTR-DCI-42...: Versión de firmware V-DME 1.19 / 1.20
– MTR-DCI-52...: Versión de firmware V-DME 1.19 / 1.20
– MTR-DCI-62...: Versión de firmware V-DME 1.20
• Verifique con versiones posteriores del MTR-DCI, siexiste un PlugIn actualizado. Si es necesario, consulte aFesto.
NotaSe necesitan derechos de administrador para instalar elFCT.
El FCT se instala en su PC con un programa de instalación. ElPlugIn MTR-DCI se instala en su PC junto con el programa deinstalación del FCT.
1. Cierre todos los programas.
2. Coloque el CD Festo Configuration Tool en su unidad deCD ROM. Si tiene activado Auto Run en su sistema, lainstalación arrancará automáticamente y podrá omitir lospasos 3 y 4.
3. Seleccione [Ejecutar] en el menú de inicio.
4. Escriba D:\setup (si es necesario, sustituya la D por laletra de su unidad de CD ROM).
5. Siga las instrucciones de la pantalla.
5. Puesta a punto
5-20 Festo P.BE-MTR-DCI-IO-ES es 1209d
5.3.2 Procedimiento para la puesta a punto con el Festo ConfigurationTool
Inicio del FCT
Para poner a punto el MTR-DCI con el FCT realice los siguien-tes pasos:
1. Conecte el MTR-DCI al PC por medio del interface RS232Observe aquí las instrucciones del capítulo 3.4.
2. Inicio del FCT: Haga un doble clic en el icono del FestoConfiguration Tool en el escritorio– o bien –abra el menú [Inicio] de Windows y seleccione la entrada[Festo Software] [Festo Configuration Tool].
3. Cree un proyecto en el FCT o abra un proyecto existente.Añada un dispositivo al proyecto con el PlugIn MTR-DCI.
4. Cree la conexión al dispositivo (conexión online) entre elPC y el MTR-DCI por medio de la barra de herramientasFCT.Aquí puede ser necesario tener los mismos nombres dedispositivo.
Control del dispositivo
Para que el FCT pueda controlar el MTR-DCI conectado, elinterface de control del MTR-DCI debe estar desactivado ydebe estar activo “Controller enable”. Entonces el estadoactual de la entrada ENABLE no tiene efecto. Conmute a laventana “Project output” registro “Operate” y active bajo“Device control” primero en la caja de control “FCT/HMI” yluego la caja de control “Enable”. Con ello el interface de con-trol del MTR-DCI se desactivará y se activará la habilitacióndel control del FCT (control enable).
5. Puesta a punto
5-21Festo P.BE-MTR-DCI-IO-ES es 1209d
Instrucciones sobre la puesta a punto yparametrización
Puede hallarse más información en la ayuda para el FCT conla orden [Help] [Contents FCT general] p.ej.
– ayuda sobre el trabajo con proyectos y la adición de undispositivo a un proyecto.
– ayuda sobre la definición del sistema de referencia demediciones (referenciado y coordenadas de referencia).
El PlugIn MTR-DCI para el FCT soporta todos los pasosnecesarios para la puesta a punto de un MTR-DCI.
Con el PlugIn MTR-DCI para el FCT, las parametrizacionesnecesarias pueden realizarse offline, es decir, sin tener elMTR-DCI conectado al PC. Esto permite la preparación de lapuesta a punto actual, p.ej. en la oficina de diseño cuando seplanea un nuevo sistema.
Puede hallarse más información en la ayuda del PlugIn:Orden [Help] [Contents of installed PlugIns] [Festo (nombredel fabricante)] [MTR-DCI (nombre del PlugIn)] p.ej.:
– para describir los diálogos del “Device MTR-DCI”
– para describir las etapas de trabajo para la puesta apunto
– para las funciones básicas: Conexión del dispositivo,nombre del dispositivo, control del dispositivo y para laprotección por palabra clave (password).

5. Puesta a punto
5-22 Festo P.BE-MTR-DCI-IO-ES es 1209d
5.4 Comunicación con controlador de nivel superior
5.4.1 Prueba de funcionamiento de las I/O
AdvertenciaRiesgo de lesiones. Los fallos en la parametrización pue-den causar lesiones a las personas o daños a los equipos.
• Habilite el control sólo si el sistema está correctamenteinstalado y parametrizado.
Para que el MTR-DCI pueda ser controlado a través del inter-face del control, hay que desactivar el control del dispositivomanual a través del panel de control / software FCT.
– automáticamente cuando la tensión de funcionamiento sedesconecta (HMI = off)
– a través del panel de control del MTR-DCI con la orden demenú [HMI control] (HMI = off)
– con FCT bajo “Device control” en la ventana “Generaloutput”, (FCT = off).
Para verificar la configuración y el ajuste del eje, introduzcaun sencillo programa de prueba o simule el control activandodirectamente las entradas.
• Véase la descripción de la función del interface de controlen el capítulo 5.4.2.
• Proporcione las entradas al sistema necesarias en elMTR-DCI. Debe haber una señal 1 en la entrada ENABLE(control y etapa final de potencia habilitados)
• Tenga en cuenta también las señales de salida. Habrá unaseñal 1 en la salida READY (disponibilidad para funcionar)si el control y la etapa final de potencia están habilitados ysi no se ha reconocido ningún fallo.
• Programe o ejecute el recorrido de referencia así comoalgunos movimientos de posicionado.
• Compruebe la reacción de posicionado.
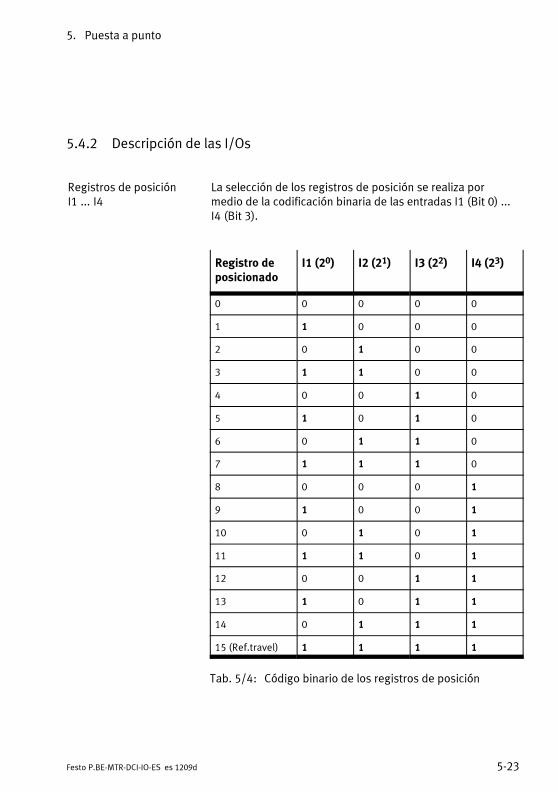
5. Puesta a punto
5-23Festo P.BE-MTR-DCI-IO-ES es 1209d
5.4.2 Descripción de las I/Os
Registros de posiciónI1 ... I4
La selección de los registros de posición se realiza pormedio de la codificación binaria de las entradas I1 (Bit 0) ...I4 (Bit 3).
Registro deposicionado
I1 (20) I2 (21) I3 (22) I4 (23)
0 0 0 0 0
1 1 0 0 0
2 0 1 0 0
3 1 1 0 0
4 0 0 1 0
5 1 0 1 0
6 0 1 1 0
7 1 1 1 0
8 0 0 0 1
9 1 0 0 1
10 0 1 0 1
11 1 1 0 1
12 0 0 1 1
13 1 0 1 1
14 0 1 1 1
15 (Ref.travel) 1 1 1 1
Tab. 5/4: Código binario de los registros de posición
5. Puesta a punto
5-24 Festo P.BE-MTR-DCI-IO-ES es 1209d
START I5 La secuencia del registros de posicionado se inicia con unflanco ascendente en la entrada START.
Requisito previo:
– debe haber una señal 1 activa en READY (sin fallos,ENABLE = 1)
– debe haber una señal 1 activa en MC
– el registro de posicionado deseado debe hallarse enI1 ... I4.
Pin Señal START (entrada)
I5 0> 1 Inicio del registro de posición
El procesamiento del registro de posicionado puede inter-rumpirse con un flanco descendente en la entrada ENABLE(> 0). Si se pone en marcha de nuevo, el registro de posi-ción será procesado de nuevo a partir de la posición actual.
ENABLE I6 Control y etapa final de salida habilitados.
Requisito previo:
– debe haber señal 0 en START
– no hay fallo.
Un flanco ascendente (> 1) en la entrada ENABLE hace quese conecte el controlador y la etapa final de potencia.
Un flanco descendente (> 0) en la entrada ENABLE hace quese desconecte el controlador y la etapa final de potencia. Elrecorrido en curso se detendrá. Cuando se desconecta laetapa final de potencia, el accionamiento queda sin par yfuera de control. El motor ya no recibe corriente y el actuadorpuede desplazarse.
Mientras la tensión de alimentación no se desconecte, seregistra la posición actual, incluso tras desconectar etapafinal de potencia. Al habilitarlo de nuevo el accionamientoestará en la posición actual y controlado.
5. Puesta a punto
5-25Festo P.BE-MTR-DCI-IO-ES es 1209d
Si hay señal 1 en la entrada ENABLE, el controlador y la etapafinal de potencia estarán conectados. El registro de posiciónactual será procesado con la siguiente señal de START.
Pin Estado ENABLE
I6 Señal-1 El controlador y etapa final de potenciaestán conectados
Señal-0 El controlador y etapa final de potenciaestán desconectados
1> 0 Salir de los fallos
READY O1 Listo para funcionar. Se cumplen todos los requisitos parainiciar un procedimiento de posicionado.
Pin Nivel READY
O1 0 El sistema no está listo para funcionar– ENABLE no se halla activada o– hay un fallo
1 El sistema está listo para funcionar.– ENABLE está activada y– no hay fallo
MC O2 Motion complete (movimiento terminado)Indica que se ha completado una orden de posicionado y quese ha desactivado la entrada START.
Pin Estado MOTION COMPLETE
O2 Señal-0 Se está realizando el procedimiento deposicionado o la señal START aún está en 1.
Señal-1 Tarea de posicionado completada
5. Puesta a punto
5-26 Festo P.BE-MTR-DCI-IO-ES es 1209d
5.4.3 Descripción de la función (diagrama de pulsos-tiempo)
Conexión y recorrido de referencia
Reacción en el arranque Para garantizar que el sistema arranca correctamente, todaslas señales de entrada deben estabilizarse cuando se conectala tensión de alimentación (mín. 1 s). Tras ello, se interroganlas señales de entrada:
Si se produce un fallo cuando se conecta el dispositivo, laseñal START > 1 no será interrogada hasta que la señalFAULT no sea cancelada.
Si ho hay fallos y la entrada de habilitación está activa (señalENABLE = 1), el control indica su disponibilidad de funcionar,(señal READY > 1 y señal MC = 1 (Motion Complete).
Iniciar recorrido dereferencia
Si no hay fallos y está activa la habilitación (ENABLE = 1), elrecorrido de referencia (input word I1 ... I4 = 1, flancopositivo en la entrada START ) puede realizarse. Cuando seactiva la señal START (> 1), la señal MC (Motion Complete)se desactiva (> 0), el actuador realiza el recorrido dereferencia.
Interrupción (disable) El recorrido de referencia puede interrumpirse en cualquierregistro de posición con un flanco descendente en la entradaENABLE (> 0).
Fallo Si se interrumpe el recorrido de referencia cancelando laseñal ENABLE o por un fallo, el control activará internamentela señal de FAULT (> 1, HOMING ERROR). La señal MC y laseñal READY se desactivarán> 0.
5. Puesta a punto
5-27Festo P.BE-MTR-DCI-IO-ES es 1209d
NotaSi se produce un fallo durante el recorrido de referencia,debe hacer lo siguiente antes de iniciar un nuevo registrode posicionado.
– si es necesario, desactivar la entrada START (= 0)
– borrar el fallo con un flanco descendente en ENABLE(> 0)
– repetir el recorrido de referencia.
NotaCon ejes que no son autobloqueables siempre hay querealizar un nuevo recorrido de referencia. Con ejes auto-bloqueables, el punto de referencia existente permaneceválido hasta que se realiza un nuevo recorrido de referen-cia.
Cuando se ha completado correctamente el recorrido dereferencia, la señal MC se activa de nuevo (> 1). Tras esto,puede ejecutarse cualquier procedimiento de posicionado.
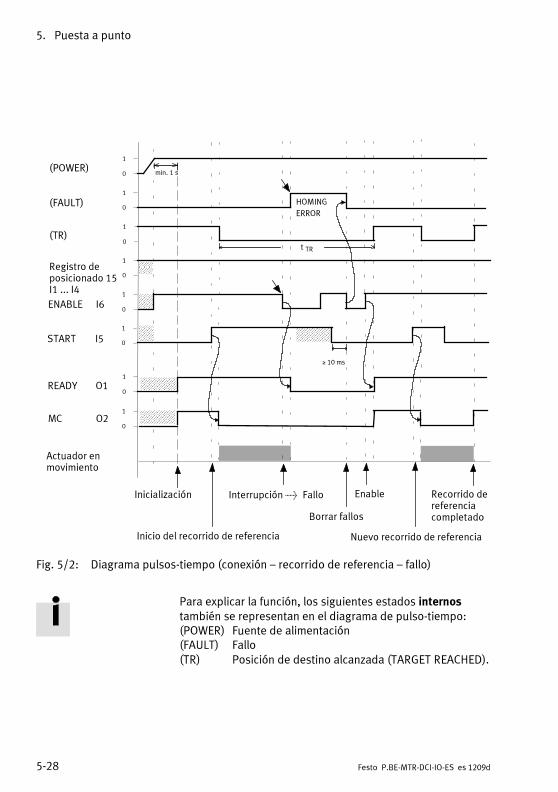
5. Puesta a punto
5-28 Festo P.BE-MTR-DCI-IO-ES es 1209d
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
t TR
min. 1 s
≥ 10 ms
HOMING
ERROR
(TR)
READY O1
START I5
(FAULT)
Actuador enmovimiento
Inicio del recorrido de referencia
Registro deposicionado 15I1 ... I4
MC O2
ENABLE I6
(POWER)
Inicialización
Nuevo recorrido de referencia
Enable
Borrar fallos
Recorrido dereferenciacompletado
Interrupción> Fallo
Fig. 5/2: Diagrama pulsos-tiempo (conexión – recorrido de referencia – fallo)
Para explicar la función, los siguientes estados internostambién se representan en el diagrama de pulso-tiempo:(POWER) Fuente de alimentación(FAULT) Fallo(TR) Posición de destino alcanzada (TARGET REACHED).
5. Puesta a punto
5-29Festo P.BE-MTR-DCI-IO-ES es 1209d
Procedimientos de posicionado
Iniciar recorrido deposicionado
Si no hay fallos y está activa la habilitación (ENABLE = 1), elprocedimiento de posicionado (input word I1 ... I4 = 1,flanco positivo en la entrada START ) puede realizarse.Cuando se activa la señal START (> 1), la señal MC (MotionComplete) se desactiva (> 0), el actuador se mueve a unaposición de destino especificada. Mientras el actuador estáen movimiento, la señal MC permanece desactivada, y nopuede iniciarse un registro de posición adicional con laseñal START.
Interrupción Con un flanco descendente en la entrada ENABLE (> 0), lassalidas READY y MC se desactivan (> 0). El procedimiento deposicionado en curso se interrumpe. Cualquier señal dearranque será ignorada Cuando la señal ENABLE> 1 seactive de nuevo, READY y MC aún no se activarán hastaque la señal START se desactive (> 0). Entonces puedeiniciarse el nuevo registro de posicionado con un flancoascendente en la entrada START (> 1).
Posición alcanzada La señal TR será activada con registros de posicionadocuando se alcanza la posición nominal (tras aprox. 20 ms).Si se activa la señal TR mientras la señal de START aún estáen 1, la señal MC permanecerá en 0 hasta que se desactive laseñal START. Este par se señales START/MC habilita la confir-mación de señal para el PLC (función de handshake, verFig. 5/3: Start 1).Si la señal START es desactivada después que la señal MChaya confirmado el arranque (MC> 0) y antes de que seactive la señal TR, la señal MC será activada al mismo tiempoque la señal TR (MC, TR> 1, ver Fig. 5/3 cuando se alcanceel valor nominal Start 2).
Fallo Durante el funcionamiento, las salidas READY y MC se desac-tivarán si se produce un fallo. Un fallo en el funcionamientoes claramente indicado por el siguiente estado de I/O:
– Tensión de funcionamiento aplicada
– Entradas: ENABLE = 1 y START = 0
– Salidas: MC = 0 y READY = 0.

5. Puesta a punto
5-30 Festo P.BE-MTR-DCI-IO-ES es 1209d
NotaSi se produce un fallo durante el funcionamiento, debehacer lo siguiente antes de iniciar un nuevo registro deposicionado:
– si es necesario, desactive la entrada START (= 0).
– borre el fallo con un flanco descendente en ENABLE(> 0)
Una vez eliminado el fallo y hay un flanco ascendente enENABLE (> 1) la salida READY indica (> 1) que puede em-pezarse una nueva tarea de posicionado. Si el fallo no puedeser eliminado, tal vez sea causado por la rotura de un cable.
(TR)
READY O1
START I5
(FAULT)
Actuador enmovimiento
Start 1
Registro deposiciónI1 ... I4
MC O2
ENABLE I6
Posición nominalalcanzada
Preparado parafuncionar
Start 2
Posición nominalalcanzada
Cancelar Enable
1
0
1
0
1
0
1
0
1
0
1
0
1
0
t TR
t ≥ t TRt ‹ t TR
Fig. 5/3: Diagrama de pulsos-tiempo (procedimiento de posicionado – inicio – posiciónnominal alcanzada – cancelar)

Funcionamiento, mantenimiento y diagnosis
6-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Capítulo 6
Funcionamiento, mantenimiento y diagnosis
6. Funcionamiento, mantenimiento y diagnosis
6-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
6. Funcionamiento, mantenimiento y diagnosis 6-1. . . . . . . . . . . . . . . . . . . . . . . .
6.1 Instrucciones importantes para el usuario 6-3. . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Diagnosis e indicación de errores 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Posibilidades generales de diagnosis 6-6. . . . . . . . . . . . . . . . . . . . . . .
6.2.2 Indicadores de estado LED 6-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 Mensajes de fallo en el display (sólo tipo MTR-DCI-...-H2) 6-9. . . . . . .
6. Funcionamiento, mantenimiento y diagnosis
6-3Festo P.BE-MTR-DCI-IO-ES es 1209d
6.1 Instrucciones importantes para el usuario
Tenga en cuenta las siguientes instrucciones y recomendacio-nes cuando programe sistemas de posicionado con ejes eléc-tricos:
Comportamiento en el arranque y referencia
Nota• Asegúrese de que el eje se halla dentro del margen deposicionamiento permitido cuando se pone en marcha.
• Cuando se desconecte la tensión de alimentación, es-pere unos 10 segundos antes de conectar de nuevo eldispositivo.
AdvertenciaRiesgo de lesiones.Los fallos en la parametrización pueden causar lesiones alas personas o daños materiales.
• En los siguientes casos es absolutamente esencial reali-zar un recorrido de referencia para establecer correcta-mente las coordenadas de base y la zona de trabajo:
– en la primera puesta a punto,
– después de modificar el método del recorrido de refe-rencia.
– en caso de que se produzca el error LAST ACTUALPOSITION NOT SAVED! PLEASE ENFORCE HOMINGRUN,
– con un eje que no sea irreversible después de cadapuesta en marcha.
• Asegúrese de que el eje se halla dentro del margen deposicionamiento permitido cuando se pone en marcha.
6. Funcionamiento, mantenimiento y diagnosis
6-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
NotaCuando el acoplamiento o el elemento de embragado en elcuerpo del acoplamiento se afloja, el motor puede girarsobre su eje longitudinal. Con ello se perderá la posiciónde referencia. Entonces debe hacerse a toda costa el reco-rrido de referencia, incluso con ejes irreversibles.
Conexión del dispositivo
AtenciónEl interface RS232 no está eléctricamente aislado. No estáprevisto para una conexión permanente a sistemas PC nicomo interface de control.
• Utilice la conexión sólo para parametrización ydiagnosis.
Protección con password
La protección por password no está establecida cuando elproducto sale de fábrica. Para evitar la sobreescritura o modi-ficación no autorizada o involuntaria de parámetros del dis-positivo, todas las funciones de descarga y control puedenser bloqueadas.
Recomendación:
• Proteja los ajustes de los ejes contra modificaciones nodeseadas con una clave de acceso (password):
– protección por password del FCT (8 caracteres, véasela ayuda del PlugIn MTR-DCI)
– protección por password del HMI con elMTR-DCI-...-H2 (3 caracteres, véase el capítulo 4.2.3).
6. Funcionamiento, mantenimiento y diagnosis
6-5Festo P.BE-MTR-DCI-IO-ES es 1209d
Control en funcionamiento
AdvertenciaRiesgo de lesiones
Los fallos en la parametrización pueden causar lesiones laspersonas y daños a la propiedad si el control se habilitacon una señal 1 en la entrada ENABLE.
• Habilite el control sólo si el sistema está correctamenteinstalado y parametrizado.
AtenciónObserve las especificaciones del fabricante para las condi-ciones de funcionamiento permitidas de los motores yaccionamientos utilizados, p.ej. respecto a las velocidadesde posicionado permitidas.
AtenciónDaños a componentes
El movimiento a las posiciones finales mecánicas no estápermitido durante el funcionamiento. Si se hace un movi-miento a las posiciones finales con una carga elevada, lasposiciones finales pueden bloquearse.
NotaTenga en cuenta las funciones implementadas en el marcodel concepto de PARO DE EMERGENCIA correspondienteen los programas de control.
Cuidados y mantenimiento
Los grupos motor no requieren mantenimiento durante suvida útil especificada. Siga las instrucciones de manteni-miento de los componentes utilizados.
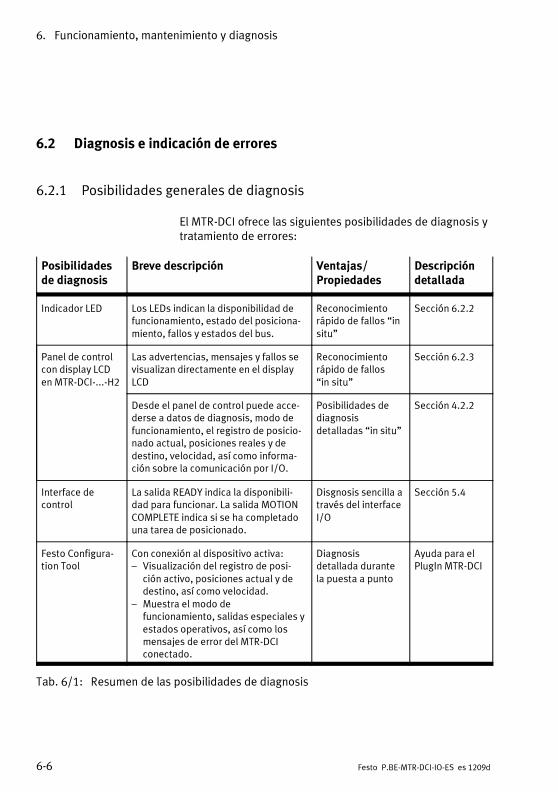
6. Funcionamiento, mantenimiento y diagnosis
6-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
6.2 Diagnosis e indicación de errores
6.2.1 Posibilidades generales de diagnosis
El MTR-DCI ofrece las siguientes posibilidades de diagnosis ytratamiento de errores:
Posibilidadesde diagnosis
Breve descripción Ventajas/Propiedades
Descripcióndetallada
Indicador LED Los LEDs indican la disponibilidad defuncionamiento, estado del posiciona-miento, fallos y estados del bus.
Reconocimientorápido de fallos “insitu”
Sección 6.2.2
Panel de controlcon display LCDenMTR-DCI-...-H2
Las advertencias, mensajes y fallos sevisualizan directamente en el displayLCD
Reconocimientorápido de fallos“in situ”
Sección 6.2.3
Desde el panel de control puede acce-derse a datos de diagnosis, modo defuncionamiento, el registro de posicio-nado actual, posiciones reales y dedestino, velocidad, así como informa-ción sobre la comunicación por I/O.
Posibilidades dediagnosisdetalladas “in situ”
Sección 4.2.2
Interface decontrol
La salida READY indica la disponibili-dad para funcionar. La salida MOTIONCOMPLETE indica si se ha completadouna tarea de posicionado.
Disgnosis sencilla através del interfaceI/O
Sección 5.4
Festo Configura-tion Tool
Con conexión al dispositivo activa:– Visualización del registro de posi-
ción activo, posiciones actual y dedestino, así como velocidad.
– Muestra el modo defuncionamiento, salidas especiales yestados operativos, así como losmensajes de error del MTR-DCIconectado.
Diagnosisdetallada durantela puesta a punto
Ayuda para elPlugIn MTR-DCI
Tab. 6/1: Resumen de las posibilidades de diagnosis
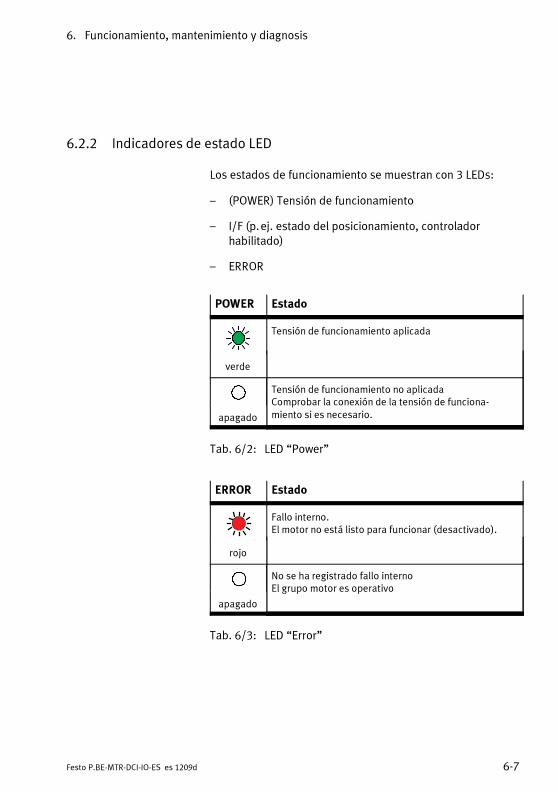
6. Funcionamiento, mantenimiento y diagnosis
6-7Festo P.BE-MTR-DCI-IO-ES es 1209d
6.2.2 Indicadores de estado LED
Los estados de funcionamiento se muestran con 3 LEDs:
– (POWER) Tensión de funcionamiento
– I/F (p.ej. estado del posicionamiento, controladorhabilitado)
– ERROR
POWER Estado
Tensión de funcionamiento aplicada
verde
Tensión de funcionamiento no aplicadaComprobar la conexión de la tensión de funciona-miento si es necesario.apagado
Tab. 6/2: LED “Power”
ERROR Estado
Fallo interno.El motor no está listo para funcionar (desactivado).
rojo
No se ha registrado fallo internoEl grupo motor es operativo
apagado
Tab. 6/3: LED “Error”

6. Funcionamiento, mantenimiento y diagnosis
6-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
I/F 1) Estado 2)
Preparado para funcionar– Procedimiento de posicionado completado
(Movimiento finalizado).– Control y etapa final de salida habilitados.verde
No dispuesto para funcionar y habilitación ausente– Posición nominal no alcanzada; procedimiento de
posicionado detenido– Control y etapa final de salida no habilitados.rojo
Listo para funcionar, no está habilitado– Procedimiento de posicionado completado
(Movimiento finalizado)– Control y etapa final de salida no habilitados.verde/rojo
Modo de posicionado– Posición de destino no alcanzada (procedimiento de
posicionado en marcha)– Control y etapa final de salida habilitados.– o fallo
apagado
1) LED bicolor2) Si no hay fallo, es decir LED ERROR = apagado
Tab. 6/4: LED “I/F” (interface/bus de campo)
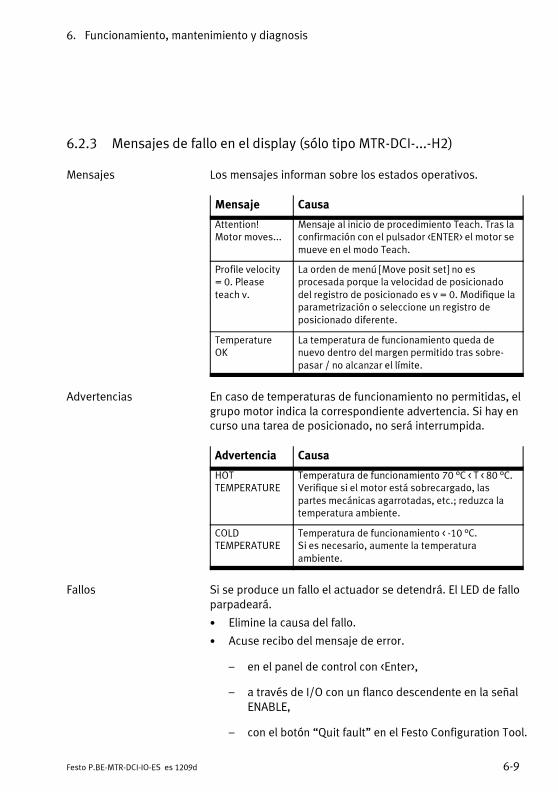
6. Funcionamiento, mantenimiento y diagnosis
6-9Festo P.BE-MTR-DCI-IO-ES es 1209d
6.2.3 Mensajes de fallo en el display (sólo tipo MTR-DCI-...-H2)
Mensajes Los mensajes informan sobre los estados operativos.
Mensaje Causa
Attention!Motor moves...
Mensaje al inicio de procedimiento Teach. Tras laconfirmación con el pulsador <ENTER> el motor semueve en el modo Teach.
Profile velocity= 0. Pleaseteach v.
La orden de menú [Move posit set] no esprocesada porque la velocidad de posicionadodel registro de posicionado es v = 0. Modifique laparametrización o seleccione un registro deposicionado diferente.
TemperatureOK
La temperatura de funcionamiento queda denuevo dentro del margen permitido tras sobre-pasar / no alcanzar el límite.
Advertencias En caso de temperaturas de funcionamiento no permitidas, elgrupo motor indica la correspondiente advertencia. Si hay encurso una tarea de posicionado, no será interrumpida.
Advertencia Causa
HOTTEMPERATURE
Temperatura de funcionamiento 70 °C < T < 80 °C.Verifique si el motor está sobrecargado, laspartes mecánicas agarrotadas, etc.; reduzca latemperatura ambiente.
COLDTEMPERATURE
Temperatura de funcionamiento < -10 °C.Si es necesario, aumente la temperaturaambiente.
Fallos Si se produce un fallo el actuador se detendrá. El LED de falloparpadeará.
• Elimine la causa del fallo.
• Acuse recibo del mensaje de error.
– en el panel de control con <Enter>,
– a través de I/O con un flanco descendente en la señalENABLE,
– con el botón “Quit fault” en el Festo Configuration Tool.
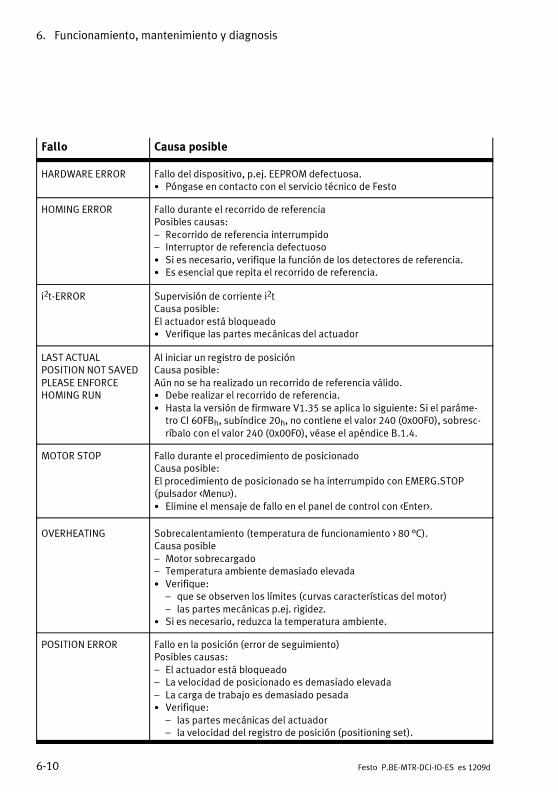
6. Funcionamiento, mantenimiento y diagnosis
6-10 Festo P.BE-MTR-DCI-IO-ES es 1209d
Fallo Causa posible
HARDWARE ERROR Fallo del dispositivo, p.ej. EEPROM defectuosa.• Póngase en contacto con el servicio técnico de Festo
HOMING ERROR Fallo durante el recorrido de referenciaPosibles causas:– Recorrido de referencia interrumpido– Interruptor de referencia defectuoso• Si es necesario, verifique la función de los detectores de referencia.• Es esencial que repita el recorrido de referencia.
i2t-ERROR Supervisión de corriente i2tCausa posible:El actuador está bloqueado• Verifique las partes mecánicas del actuador
LAST ACTUALPOSITION NOT SAVEDPLEASE ENFORCEHOMING RUN
Al iniciar un registro de posiciónCausa posible:Aún no se ha realizado un recorrido de referencia válido.• Debe realizar el recorrido de referencia.• Hasta la versión de firmware V1.35 se aplica lo siguiente: Si el paráme-
tro CI 60FBh, subíndice 20h, no contiene el valor 240 (0x00F0), sobresc-ríbalo con el valor 240 (0x00F0), véase el apéndice B.1.4.
MOTOR STOP Fallo durante el procedimiento de posicionadoCausa posible:El procedimiento de posicionado se ha interrumpido con EMERG.STOP(pulsador <Menu>).• Elimine el mensaje de fallo en el panel de control con <Enter>.
OVERHEATING Sobrecalentamiento (temperatura de funcionamiento > 80 °C).Causa posible– Motor sobrecargado– Temperatura ambiente demasiado elevada• Verifique:
– que se observen los límites (curvas características del motor)– las partes mecánicas p.ej. rigidez.
• Si es necesario, reduzca la temperatura ambiente.
POSITION ERROR Fallo en la posición (error de seguimiento)Posibles causas:– El actuador está bloqueado– La velocidad de posicionado es demasiado elevada– La carga de trabajo es demasiado pesada• Verifique:
– las partes mecánicas del actuador– la velocidad del registro de posición (positioning set).
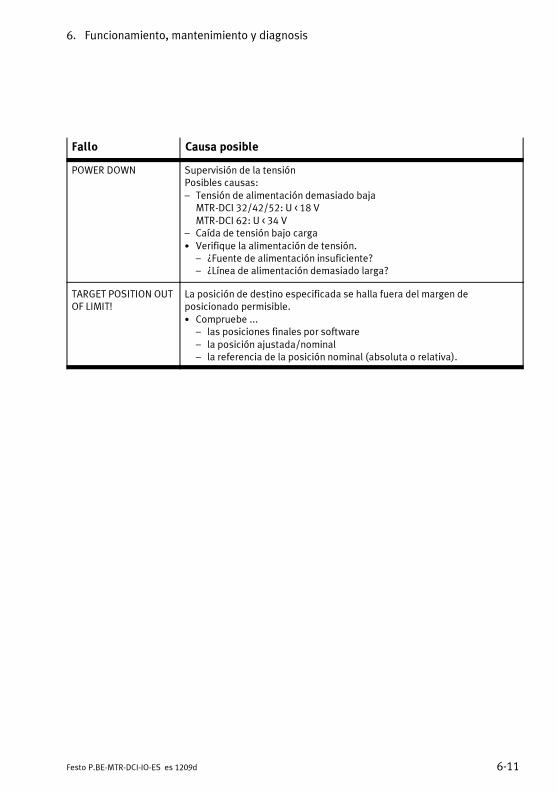
6. Funcionamiento, mantenimiento y diagnosis
6-11Festo P.BE-MTR-DCI-IO-ES es 1209d
Fallo Causa posible
POWER DOWN Supervisión de la tensiónPosibles causas:– Tensión de alimentación demasiado baja
MTR-DCI 32/42/52: U < 18 VMTR-DCI 62: U < 34 V
– Caída de tensión bajo carga• Verifique la alimentación de tensión.
– ¿Fuente de alimentación insuficiente?– ¿Línea de alimentación demasiado larga?
TARGET POSITION OUTOF LIMIT!
La posición de destino especificada se halla fuera del margen deposicionado permisible.• Compruebe ...
– las posiciones finales por software– la posición ajustada/nominal– la referencia de la posición nominal (absoluta o relativa).

6. Funcionamiento, mantenimiento y diagnosis
6-12 Festo P.BE-MTR-DCI-IO-ES es 1209d

Apéndice técnico
A-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Apéndice A
Apéndice técnico
A. Apéndice técnico
A-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
A. Apéndice técnico A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas A-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Accesorios A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Curvas características del motor A-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4 Conversión de las unidades de medida A-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
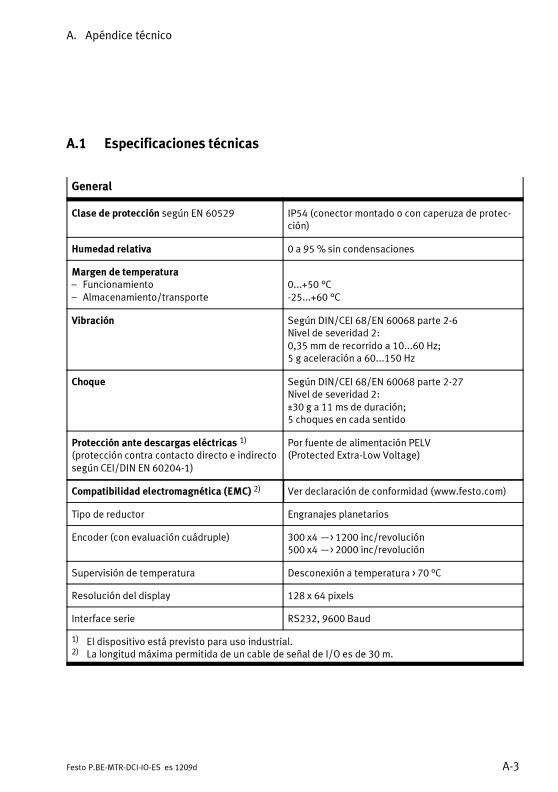
A. Apéndice técnico
A-3Festo P.BE-MTR-DCI-IO-ES es 1209d
A.1 Especificaciones técnicas
General
Clase de protección según EN 60529 IP54 (conector montado o con caperuza de protec-ción)
Humedad relativa 0 a 95 % sin condensaciones
Margen de temperatura– Funcionamiento– Almacenamiento/transporte
0...+50 °C-25...+60 °C
Vibración Según DIN/CEI 68/EN 60068 parte 2-6Nivel de severidad 2:0,35 mm de recorrido a 10...60 Hz;5 g aceleración a 60...150 Hz
Choque Según DIN/CEI 68/EN 60068 parte 2-27Nivel de severidad 2:±30 g a 11 ms de duración;5 choques en cada sentido
Protección ante descargas eléctricas 1)
(protección contra contacto directo e indirectosegún CEI/DIN EN 60204-1)
Por fuente de alimentación PELV(Protected Extra-Low Voltage)
Compatibilidad electromagnética (EMC) 2) Ver declaración de conformidad (www.festo.com)
Tipo de reductor Engranajes planetarios
Encoder (con evaluación cuádruple) 300 x4—> 1200 inc/revolución500 x4—> 2000 inc/revolución
Supervisión de temperatura Desconexión a temperatura > 70 °C
Resolución del display 128 x 64 pixels
Interface serie RS232, 9600 Baud
1) El dispositivo está previsto para uso industrial.2) La longitud máxima permitida de un cable de señal de I/O es de 30 m.
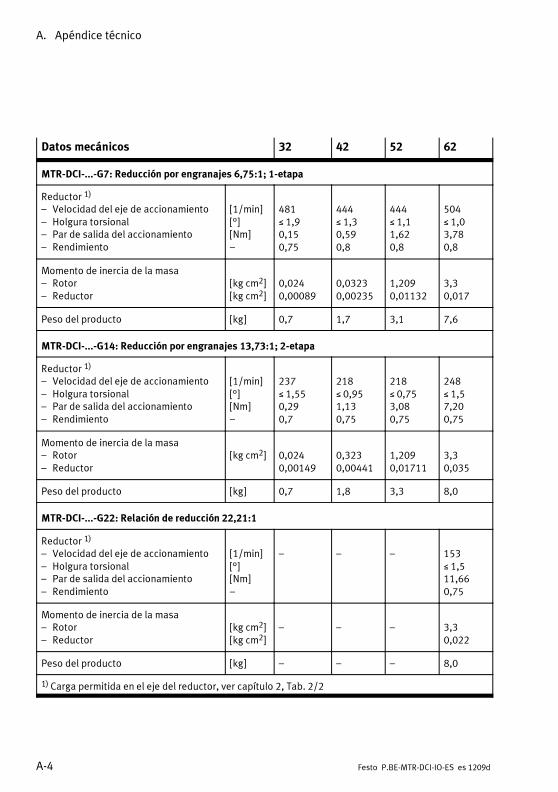
A. Apéndice técnico
A-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
Datos mecánicos 32 42 52 62
MTR-DCI-...-G7: Reducción por engranajes 6,75:1; 1-etapa
Reductor 1)
– Velocidad del eje de accionamiento– Holgura torsional– Par de salida del accionamiento– Rendimiento
[1/min][°][Nm]–
481≤ 1,90,150,75
444≤ 1,30,590,8
444≤ 1,11,620,8
504≤ 1,03,780,8
Momento de inercia de la masa– Rotor– Reductor
[kg cm2][kg cm2]
0,0240,00089
0,03230,00235
1,2090,01132
3,30,017
Peso del producto [kg] 0,7 1,7 3,1 7,6
MTR-DCI-...-G14: Reducción por engranajes 13,73:1; 2-etapa
Reductor 1)
– Velocidad del eje de accionamiento– Holgura torsional– Par de salida del accionamiento– Rendimiento
[1/min][°][Nm]–
237≤ 1,550,290,7
218≤ 0,951,130,75
218≤ 0,753,080,75
248≤ 1,57,200,75
Momento de inercia de la masa– Rotor– Reductor
[kg cm2] 0,0240,00149
0,3230,00441
1,2090,01711
3,30,035
Peso del producto [kg] 0,7 1,8 3,3 8,0
MTR-DCI-...-G22: Relación de reducción 22,21:1
Reductor 1)
– Velocidad del eje de accionamiento– Holgura torsional– Par de salida del accionamiento– Rendimiento
[1/min][°][Nm]–
– – – 153≤ 1,511,660,75
Momento de inercia de la masa– Rotor– Reductor
[kg cm2][kg cm2]
– – – 3,30,022
Peso del producto [kg] – – – 8,0
1) Carga permitida en el eje del reductor, ver capítulo 2, Tab. 2/2
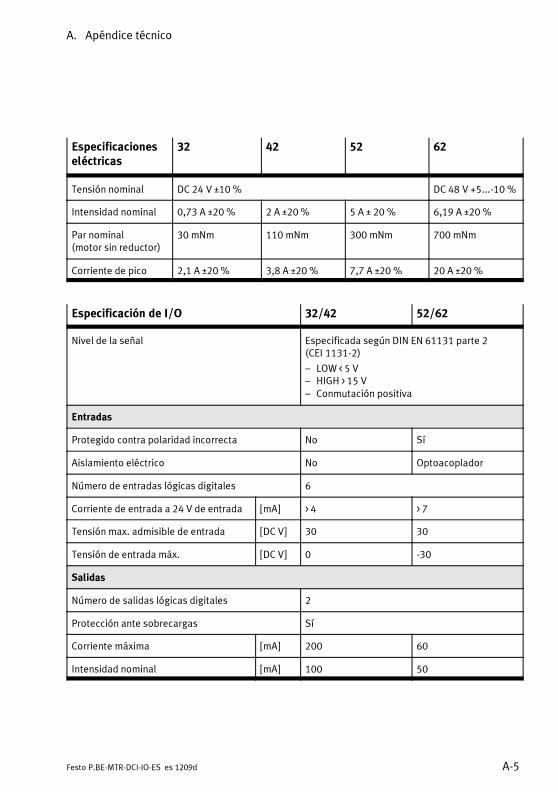
A. Apéndice técnico
A-5Festo P.BE-MTR-DCI-IO-ES es 1209d
Especificacioneseléctricas
32 42 52 62
Tensión nominal DC 24 V ±10 % DC 48 V +5...-10 %
Intensidad nominal 0,73 A ±20 % 2 A ±20 % 5 A ± 20 % 6,19 A ±20 %
Par nominal(motor sin reductor)
30 mNm 110 mNm 300 mNm 700 mNm
Corriente de pico 2,1 A ±20 % 3,8 A ±20 % 7,7 A ±20 % 20 A ±20 %
Especificación de I/O 32/42 52/62
Nivel de la señal Especificada según DIN EN 61131 parte 2(CEI 1131-2)
– LOW < 5 V– HIGH > 15 V– Conmutación positiva
Entradas
Protegido contra polaridad incorrecta No Sí
Aislamiento eléctrico No Optoacoplador
Número de entradas lógicas digitales 6
Corriente de entrada a 24 V de entrada [mA] > 4 > 7
Tensión max. admisible de entrada [DC V] 30 30
Tensión de entrada máx. [DC V] 0 -30
Salidas
Número de salidas lógicas digitales 2
Protección ante sobrecargas Sí
Corriente máxima [mA] 200 60
Intensidad nominal [mA] 100 50
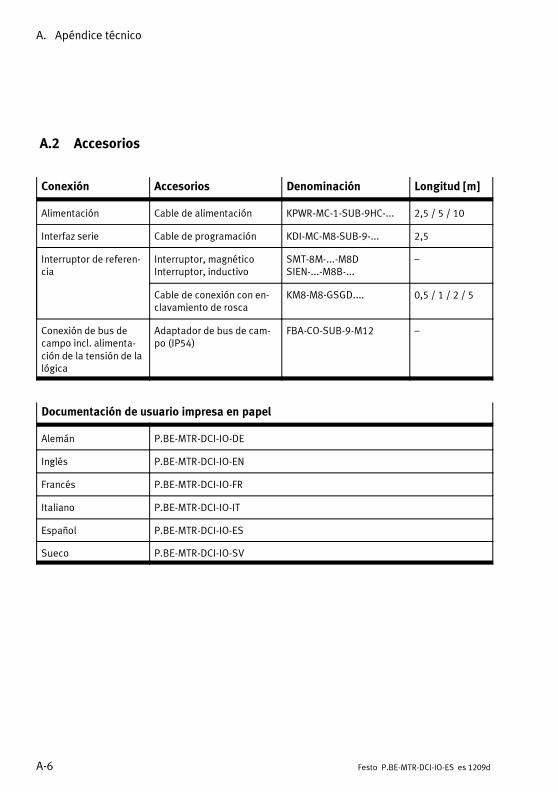
A. Apéndice técnico
A-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
A.2 Accesorios
Conexión Accesorios Denominación Longitud [m]
Alimentación Cable de alimentación KPWR-MC-1-SUB-9HC-... 2,5 / 5 / 10
Interfaz serie Cable de programación KDI-MC-M8-SUB-9-... 2,5
Interruptor de referen-cia
Interruptor, magnéticoInterruptor, inductivo
SMT-8M-...-M8DSIEN-...-M8B-...
–
Cable de conexión con en-clavamiento de rosca
KM8-M8-GSGD.... 0,5 / 1 / 2 / 5
Conexión de bus decampo incl. alimenta-ción de la tensión de lalógica
Adaptador de bus de cam-po (IP54)
FBA-CO-SUB-9-M12 –
Documentación de usuario impresa en papel
Alemán P.BE-MTR-DCI-IO-DE
Inglés P.BE-MTR-DCI-IO-EN
Francés P.BE-MTR-DCI-IO-FR
Italiano P.BE-MTR-DCI-IO-IT
Español P.BE-MTR-DCI-IO-ES
Sueco P.BE-MTR-DCI-IO-SV

A. Apéndice técnico
A-7Festo P.BE-MTR-DCI-IO-ES es 1209d
A.3 Curvas características del motor
1 Par de salida en el eje del reductor M [Nm]
2 Intensidad I [A]
3 Modo recomendado
4 Zona no permitida
5 Sobrecarga
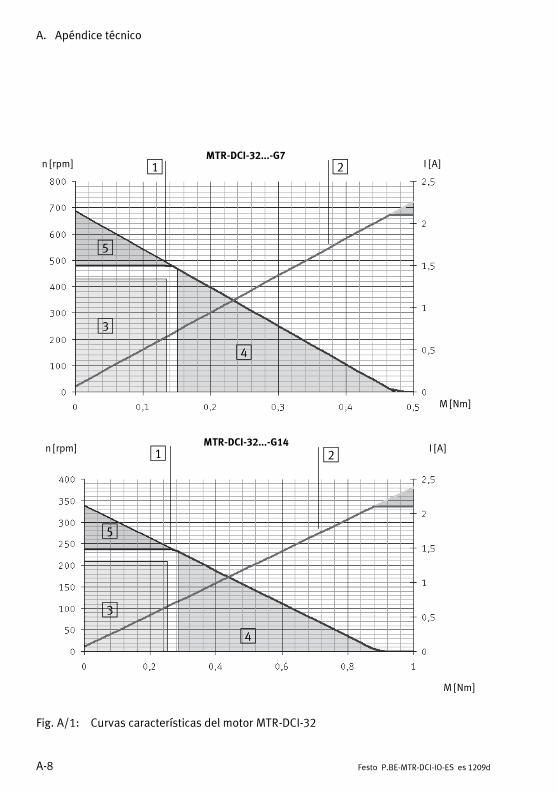
A. Apéndice técnico
A-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
MTR-DCI-32...-G14
MTR-DCI-32...-G7I [A]
M [Nm]
n [rpm] 1 2
3
4
5
I [A]
M [Nm]
n [rpm] 1 2
3
4
5
Fig. A/1: Curvas características del motor MTR-DCI-32
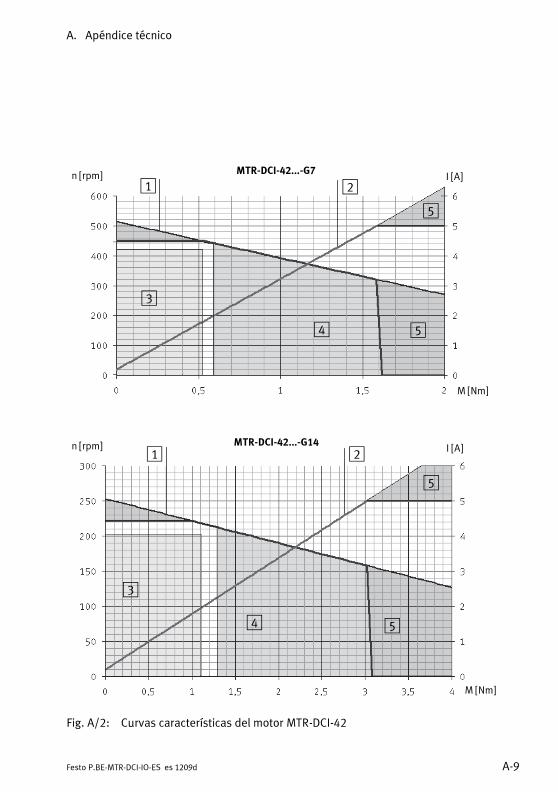
A. Apéndice técnico
A-9Festo P.BE-MTR-DCI-IO-ES es 1209d
MTR-DCI-42...-G14
MTR-DCI-42...-G7
I [A]
M [Nm]
n [rpm]1 2
3
4 5
I [A]
M [Nm]
n [rpm]1 2
3
4 5
5
5
Fig. A/2: Curvas características del motor MTR-DCI-42
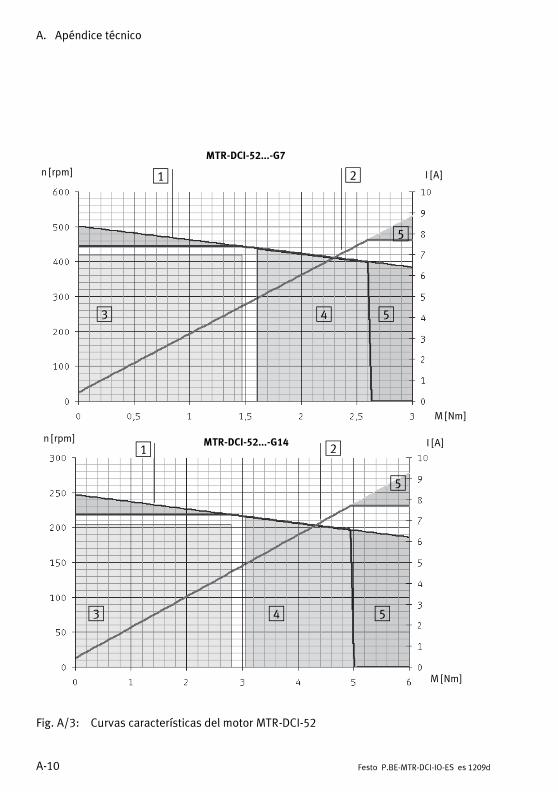
A. Apéndice técnico
A-10 Festo P.BE-MTR-DCI-IO-ES es 1209d
I [A]
M [Nm]
n [rpm] 1 2
3 4 5
5
MTR-DCI-52...-G14
MTR-DCI-52...-G7
I [A]
M [Nm]
n [rpm]1 2
3 4 5
5
Fig. A/3: Curvas características del motor MTR-DCI-52
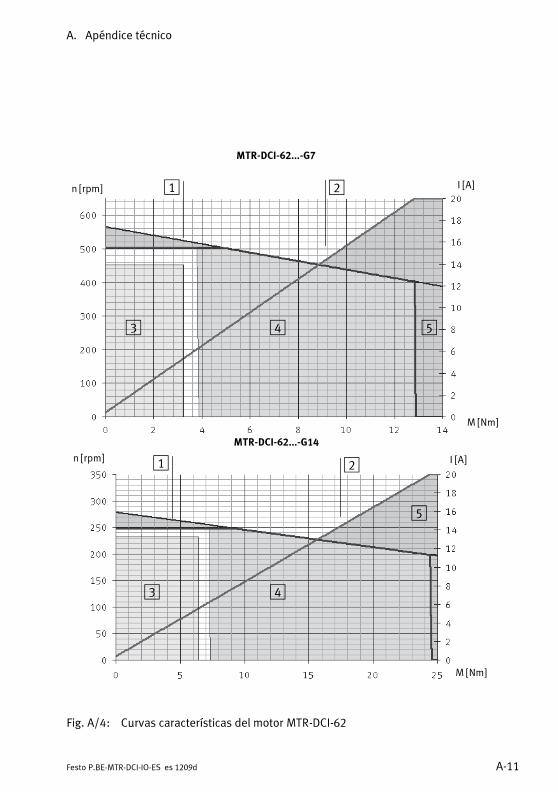
A. Apéndice técnico
A-11Festo P.BE-MTR-DCI-IO-ES es 1209d
MTR-DCI-62...-G14
MTR-DCI-62...-G7
I [A]
M [Nm]
n [rpm] 1 2
3 4
5
I [A]
M [Nm]
n [rpm] 1 2
3 4 5
Fig. A/4: Curvas características del motor MTR-DCI-62
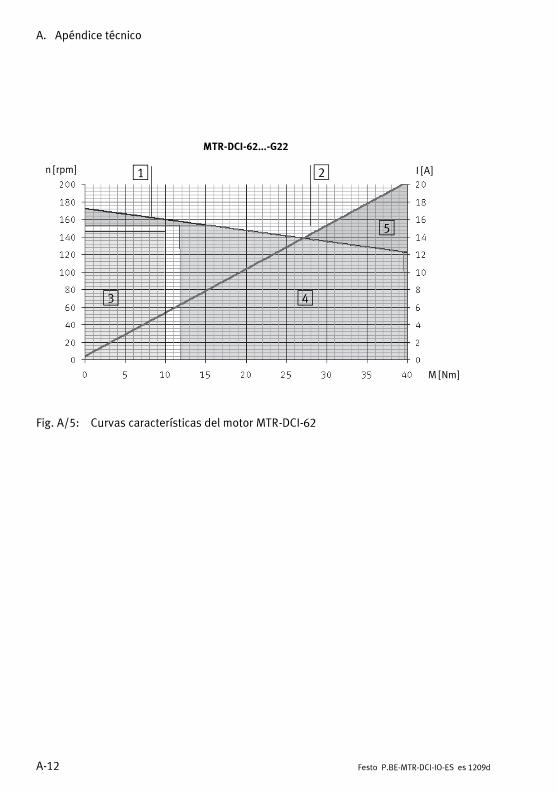
A. Apéndice técnico
A-12 Festo P.BE-MTR-DCI-IO-ES es 1209d
MTR-DCI-62...-G22
I [A]
M [Nm]
n [rpm] 1 2
3 4
5
Fig. A/5: Curvas características del motor MTR-DCI-62
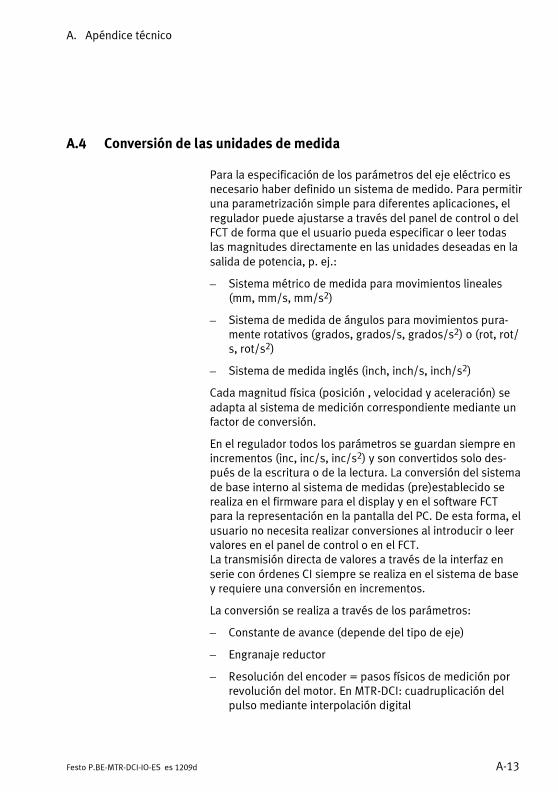
A. Apéndice técnico
A-13Festo P.BE-MTR-DCI-IO-ES es 1209d
A.4 Conversión de las unidades de medida
Para la especificación de los parámetros del eje eléctrico esnecesario haber definido un sistema de medido. Para permitiruna parametrización simple para diferentes aplicaciones, elregulador puede ajustarse a través del panel de control o delFCT de forma que el usuario pueda especificar o leer todaslas magnitudes directamente en las unidades deseadas en lasalida de potencia, p. ej.:
– Sistema métrico de medida para movimientos lineales(mm, mm/s, mm/s2)
– Sistema de medida de ángulos para movimientos pura-mente rotativos (grados, grados/s, grados/s2) o (rot, rot/s, rot/s2)
– Sistema de medida inglés (inch, inch/s, inch/s2)
Cada magnitud física (posición , velocidad y aceleración) seadapta al sistema de medición correspondiente mediante unfactor de conversión.
En el regulador todos los parámetros se guardan siempre enincrementos (inc, inc/s, inc/s2) y son convertidos solo des-pués de la escritura o de la lectura. La conversión del sistemade base interno al sistema de medidas (pre)establecido serealiza en el firmware para el display y en el software FCTpara la representación en la pantalla del PC. De esta forma, elusuario no necesita realizar conversiones al introducir o leervalores en el panel de control o en el FCT.La transmisión directa de valores a través de la interfaz enserie con órdenes CI siempre se realiza en el sistema de basey requiere una conversión en incrementos.
La conversión se realiza a través de los parámetros:
– Constante de avance (depende del tipo de eje)
– Engranaje reductor
– Resolución del encoder = pasos físicos de medición porrevolución del motor. En MTR-DCI: cuadruplicación delpulso mediante interpolación digital
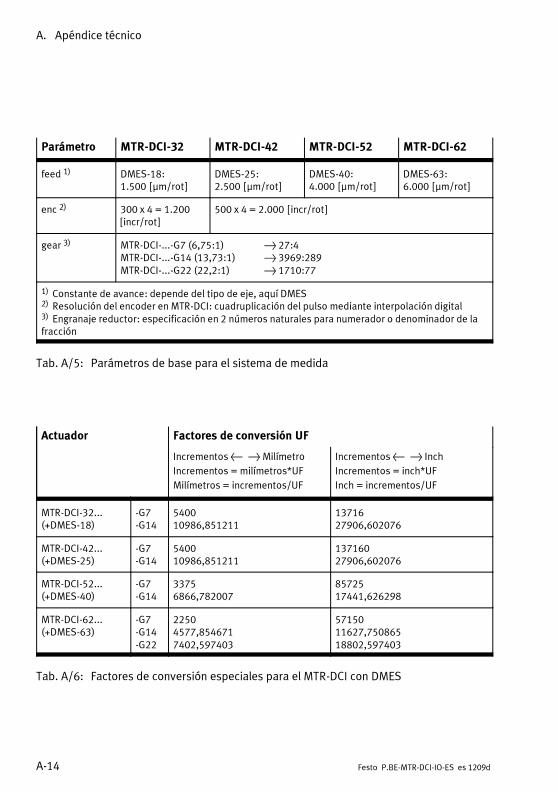
A. Apéndice técnico
A-14 Festo P.BE-MTR-DCI-IO-ES es 1209d
Parámetro MTR-DCI-32 MTR-DCI-42 MTR-DCI-52 MTR-DCI-62
feed 1) DMES-18:1.500 [μm/rot]
DMES-25:2.500 [μm/rot]
DMES-40:4.000 [μm/rot]
DMES-63:6.000 [μm/rot]
enc 2) 300 x 4 = 1.200[incr/rot]
500 x 4 = 2.000 [incr/rot]
gear 3) MTR-DCI-...-G7 (6,75:1) } 27:4MTR-DCI-...-G14 (13,73:1) } 3969:289MTR-DCI-...-G22 (22,2:1) } 1710:77
1) Constante de avance: depende del tipo de eje, aquí DMES2) Resolución del encoder en MTR-DCI: cuadruplicación del pulso mediante interpolación digital3) Engranaje reductor: especificación en 2 números naturales para numerador o denominador de lafracción
Tab. A/5: Parámetros de base para el sistema de medida
Actuador Factores de conversión UF
Incrementos{ }MilímetroIncrementos = milímetros*UFMilímetros = incrementos/UF
Incrementos{ } InchIncrementos = inch*UFInch = incrementos/UF
MTR-DCI-32...(+DMES-18)
-G7-G14
540010986,851211
1371627906,602076
MTR-DCI-42...(+DMES-25)
-G7-G14
540010986,851211
13716027906,602076
MTR-DCI-52...(+DMES-40)
-G7-G14
33756866,782007
8572517441,626298
MTR-DCI-62...(+DMES-63)
-G7-G14-G22
22504577,8546717402,597403
5715011627,75086518802,597403
Tab. A/6: Factores de conversión especiales para el MTR-DCI con DMES
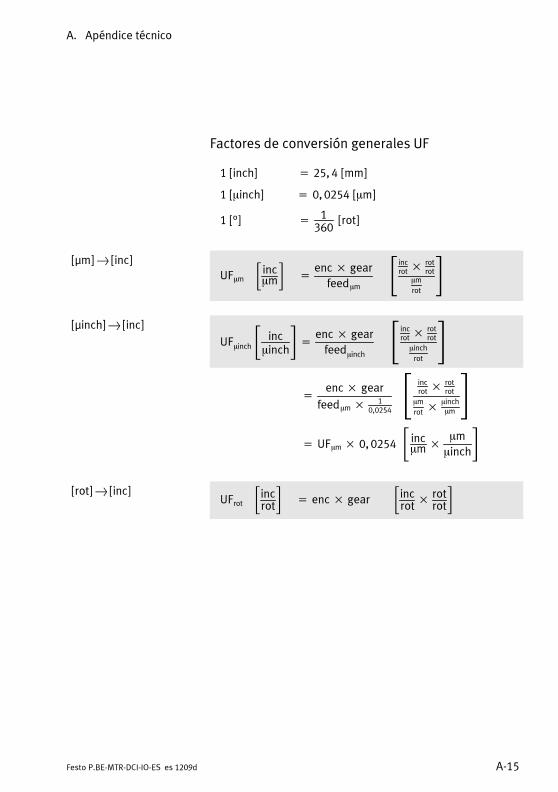
A. Apéndice técnico
A-15Festo P.BE-MTR-DCI-IO-ES es 1209d
Factores de conversión generales UF
1 [inch] = 25, 4 [mm]
1 [�inch] = 0, 0254 [�m]
1 [°] =1
360[rot]
[μm] } [inc]UF�m �inc
�m� =enc× gear
feed�m
�incrot ×rotrot
�m
rot
�[μinch] } [inc]
UF�inch � inc
�inch�= enc× gear
feed�inch
�incrot ×rotrot
�inch
rot
�=
enc× gear
feed�m ×1
0,0254
� incrot ×
rotrot
�m
rot×
�inch
�m
�= UF�m × 0, 0254 �inc
�m�m�inch�
[rot] } [inc]UFrot �incrot� = enc× gear �inc
rot×rotrot�
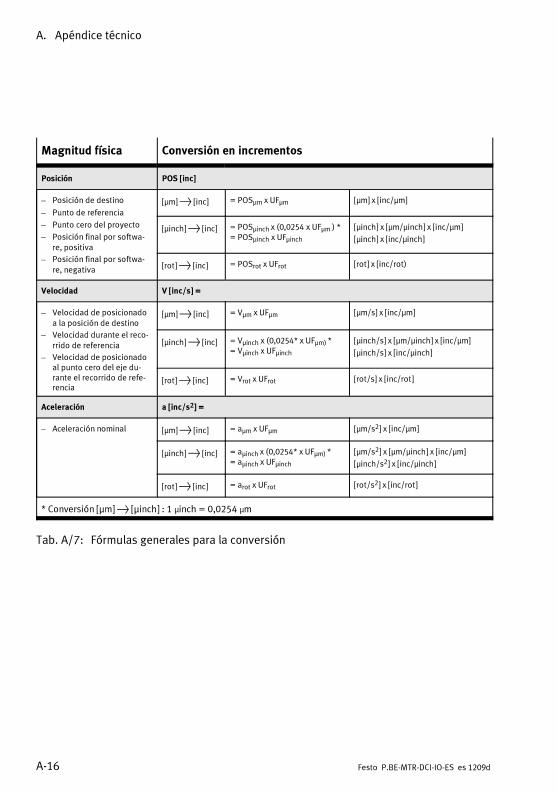
A. Apéndice técnico
A-16 Festo P.BE-MTR-DCI-IO-ES es 1209d
Magnitud física Conversión en incrementos
Posición POS [inc]
– Posición de destino
– Punto de referencia
– Punto cero del proyecto
– Posición final por softwa-re, positiva
– Posición final por softwa-re, negativa
[µm]} [inc] = POSμm x UFμm [µm] x [inc/µm]
[µinch]} [inc] = POSμinch x (0,0254 x UFμm ) *= POSμinch x UFμinch
[µinch] x [µm/µinch] x [inc/µm]
[µinch] x [inc/µinch]
[rot]} [inc] = POSrot x UFrot [rot] x [inc/rot)
Velocidad V [inc/s] =
– Velocidad de posicionadoa la posición de destino
– Velocidad durante el reco-rrido de referencia
– Velocidad de posicionadoal punto cero del eje du-rante el recorrido de refe-rencia
[µm]} [inc] = Vμm x UFμm [µm/s] x [inc/µm]
[µinch]} [inc] = Vμinch x (0,0254* x UFμm) *= Vμinch x UFμinch
[µinch/s] x [µm/µinch] x [inc/µm]
[µinch/s] x [inc/µinch]
[rot]} [inc] = Vrot x UFrot [rot/s] x [inc/rot]
Aceleración a [inc/s2] =
– Aceleración nominal [µm]} [inc] = aμm x UFμm [µm/s2] x [inc/µm]
[µinch]} [inc] = aμinch x (0,0254* x UFμm) *= aμinch x UFμinch
[µm/s2] x [µm/µinch] x [inc/µm]
[µinch/s2] x [inc/µinch]
[rot]} [inc] = arot x UFrot [rot/s2] x [inc/rot]
* Conversión [µm]} [µinch] : 1 µinch = 0,0254 µm
Tab. A/7: Fórmulas generales para la conversión

Información suplementaria
B-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Apéndice B
Información suplementaria
B. Información suplementaria
B-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
B. Información suplementaria B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 El Command Interpreter (CI) B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Procedimiento para la transferencia de datos B-4. . . . . . . . . . . . . . . . .
B.1.2 Órdenes CI B-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Objetos CI (resumen) B-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.4 Descripción del objeto B-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

B. Información suplementaria
B-3Festo P.BE-MTR-DCI-IO-ES es 1209d
B.1 El Command Interpreter (CI)
Las órdenes implementadas en el Command Interpreter(intérprete de órdenes) del MTR-DCI están basadas conrespecto a su contenido en los objetos estandarizados porCANopen (CiA Draft Standards 402).Grupo 1xxx Descripción del aparatoGrupo 2xxx Objetos de FestoGrupo 6xxx Objetos según CANopen
El CiA Draft Standard 402 trata de la implementación con-creta de CANopen en controles para accionamientos.
Directorio de objetos Todas las posibilidades de parametrización y control estánrelacionadas en el Object directory (Directorio de Objetos).Puede accederse al Object directory del controlador a travésde los Service Data Objects (SDO). Los SDOs se utilizan parala parametrización normal del controlador. El acceso a losSDOs se hace siempre desde un control de nivel superior(host). Un número inequívoco (índice, sub-índice) es asig-nado a cada Object.
Procedimiento de acceso El control de nivel superior envía al controlador, o bien unaorden de escritura (WRITE) para modificar un parámetro delObject directory, o una orden de lectura (READ) para leer unparámetro.
Para cada orden, el control de nivel superior recibe una res-puesta que contiene o bien el valor leído o la confirmación dela orden de escritura. El valor transferido (1, 2 o 4 bytes dedatos) depende del tipo de datos del Object a leer o a escribir.
A partir de la versión 1.19, el firmware del MTR-DCI ofrece laposibilidad de simular el acceso a SDO con órdenes CI através del interface RS232.
B. Información suplementaria
B-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
NotaPara restablecer los ajustes predeterminados es posible–si es necesario– borrar la EEPROM a través de la interfazen serie con la orden CI 20F1 (Data memory control) (véaseel capítulo B.1.). Con ello se perderán los ajustes específi-cos del usuario.
• Utilice órdenes del CI sólo si ya tiene experiencia con elService Data Object.
• Si es necesario, consulte a Festo.
B.1.1 Procedimiento para la transferencia de datos
AtenciónEn casos de aplicación especiales, el acceso con órdenesCI permite la parametrización y la puesta a punto delMTR-DCI directamente a través del interface RS232. Noobstante, no es adecuado para una comunicación entiempo real.
El control a través de RS232 no corresponde al uso para elque se destina y requiere, p.ej.:
– una estimación del riesgo por parte del usuario
– condiciones ambientales libres de interferencias
– salvaguarda de la transmisión de datos, p.ej. a travésdel programa de control del host.
• Utilice preferentemente el panel de control o el FCT parala puesta a punto y la parametrización.
• Utilice el interface de control del MTR-DCI para fines decontrol.
B. Información suplementaria
B-5Festo P.BE-MTR-DCI-IO-ES es 1209d
AdvertenciaLesiones a las personas y daños a la propiedad.
A través de las órdenes del CI se tiene pleno acceso a lasvariables internas del servoregulador. Un manejo inco-rrecto puede hacer que el controlador reaccione de formaimprevista y que el motor arranque sin control.
• Utilice las órdenes del CI sólo si ya tiene experiencia enel Service Data Objects.
• Infórmese sobre el uso de los Object en en CiA DraftStandard 402 antes de utilizar las órdenes CI delCommand Interpreter del MTR-DCI
Para la transferencia de datos , necesitará un programaemulador de terminal, disponible comercialmente o elterminal CI del plugin del MTR−DCI en el Festo ConfigurationTool.
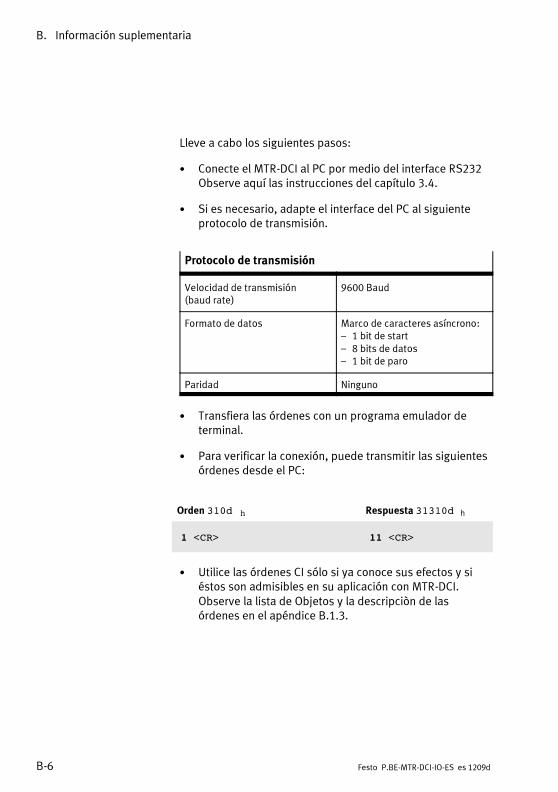
B. Información suplementaria
B-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
Lleve a cabo los siguientes pasos:
• Conecte el MTR-DCI al PC por medio del interface RS232Observe aquí las instrucciones del capítulo 3.4.
• Si es necesario, adapte el interface del PC al siguienteprotocolo de transmisión.
Protocolo de transmisión
Velocidad de transmisión(baud rate)
9600 Baud
Formato de datos Marco de caracteres asíncrono:– 1 bit de start– 8 bits de datos– 1 bit de paro
Paridad Ninguno
• Transfiera las órdenes con un programa emulador determinal.
• Para verificar la conexión, puede transmitir las siguientesórdenes desde el PC:
Orden 310d h Respuesta 31310d h
1 <CR> 11 <CR>
• Utilice las órdenes CI sólo si ya conoce sus efectos y siéstos son admisibles en su aplicación con MTR-DCI.Observe la lista de Objetos y la descripciòn de lasórdenes en el apéndice B.1.3.

B. Información suplementaria
B-7Festo P.BE-MTR-DCI-IO-ES es 1209d
Margen de valorespermitido
Los parámetros transferidos y los valores son comprobadospor el MTR-DCI antes de ser aceptados.
– Los parámetros no permitidos no serán aceptados.
– Los valores fuera del margen permitido serán limitados alvalor válido más próximo.
NotaEn el caso de valores o parámetros no permitidos, noaparecerá un mensaje de fallo en la respuesta, el valortransferido, será siempre devuelto.
Recomendación:
• Verifique que los valores y parámetros hayan sido escri-tos correctamente descargando el contenido del valor odel parámetros con una de los siguientes órdenes delectura:
Fallos de transmisión Si hay fallos de transmisión entre el Host (PC) y el dispositivode destino, p.ej. debido a fallos en la orden al Host, se trans-ferirá el Objeto 2FF0:FF<CR> en lugar de la respuesta normal.
Posibles causas:
– carácter de inicio, carácter separador incorrecto ocarácter vacío
– cifra hex incorrecta
– tipo de valor incorrecto.
Nombre Clase IIII SS Tipo Acc
communication_error
Var 2FF0 00 UINT16 R
Valor Comentario
0xFF En caso de un error de transmisión, se transferirá elvalor <0xFF> en lugar de la respuesta normal.

B. Información suplementaria
B-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
NotaLa transmisión de la orden es repetida 8 veces por el host.Tras esto, la conexión serie se considera inutilizable y esinterrumpida. Entonces debe inicializarse de nuevo latransmisión.
B.1.2 Órdenes CI
AtenciónPérdida de datos
El intérprete de órdenes (CI) contiene órdenes que reorga-nizan o borran parte de la memoria. Por ello, se destruyenlos datos existentes:
• Utilice preferentemente el panel de control o el FCT parala puesta a punto y la parametrización.
• Utilice las órdenes CI sólo en aplicaciones especialesque requieren acceso directo al controlador.
• Utilice las órdenes CI sólo si ya conoce sus efectos y siéstos son admisibles en su aplicación con MTR-DCI.
Procedimiento de acceso El control de nivel superior envía al controlador una orden deescritura (WRITE) para modificar un parámetro del directoriode objetos o bien una orden de lectura (READ) para leer unparámetro.
Para cada orden, el control de nivel superior recibe una res-puesta que contiene el valor leído o la confirmación de laorden de escritura. El valor transferido (1, 2 o 4 bytes de da-tos) depende del tipo de datos del objeto por leer o escribir.
WRITE (W) Órdenes de escritura (W) transfieren un valor en un formatoespecificado al MTR-DCI. Como respuesta, las órdenes deescritura se reflejan directamente carácter a carácter desde elcontrolador del MTR-DCI. Un checksum (suma de prueba)<PS> se insertará frente al <CR>.
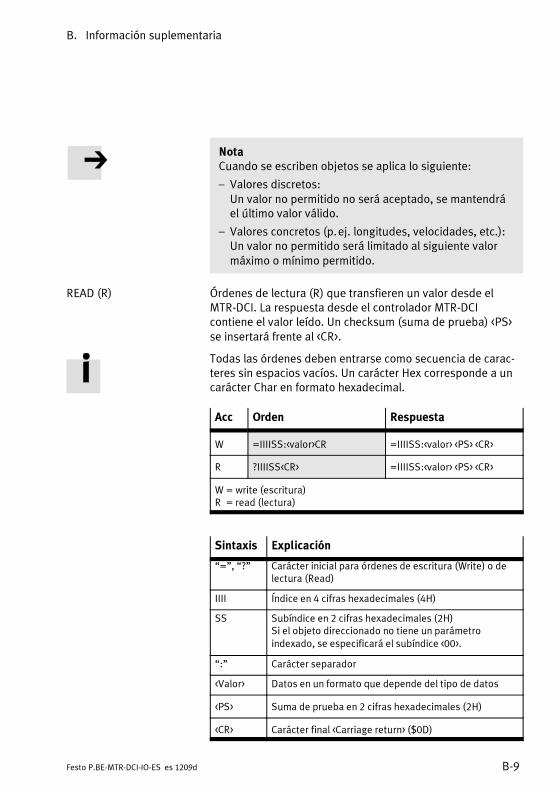
B. Información suplementaria
B-9Festo P.BE-MTR-DCI-IO-ES es 1209d
NotaCuando se escriben objetos se aplica lo siguiente:
– Valores discretos:Un valor no permitido no será aceptado, se mantendráel último valor válido.
– Valores concretos (p.ej. longitudes, velocidades, etc.):Un valor no permitido será limitado al siguiente valormáximo o mínimo permitido.
READ (R) Órdenes de lectura (R) que transfieren un valor desde elMTR-DCI. La respuesta desde el controlador MTR-DCIcontiene el valor leído. Un checksum (suma de prueba) <PS>se insertará frente al <CR>.
Todas las órdenes deben entrarse como secuencia de carac-teres sin espacios vacíos. Un carácter Hex corresponde a uncarácter Char en formato hexadecimal.
Acc Orden Respuesta
W =IIIISS:<valor>CR =IIIISS:<valor> <PS> <CR>
R ?IIIISS<CR> =IIIISS:<valor> <PS> <CR>
W = write (escritura)R = read (lectura)
Sintaxis Explicación
“=”, “?” Carácter inicial para órdenes de escritura (Write) o delectura (Read)
IIII Índice en 4 cifras hexadecimales (4H)
SS Subíndice en 2 cifras hexadecimales (2H)Si el objeto direccionado no tiene un parámetroindexado, se especificará el subíndice <00>.
“:” Carácter separador
<Valor> Datos en un formato que depende del tipo de datos
<PS> Suma de prueba en 2 cifras hexadecimales (2H)
<CR> Carácter final <Carriage return> ($0D)
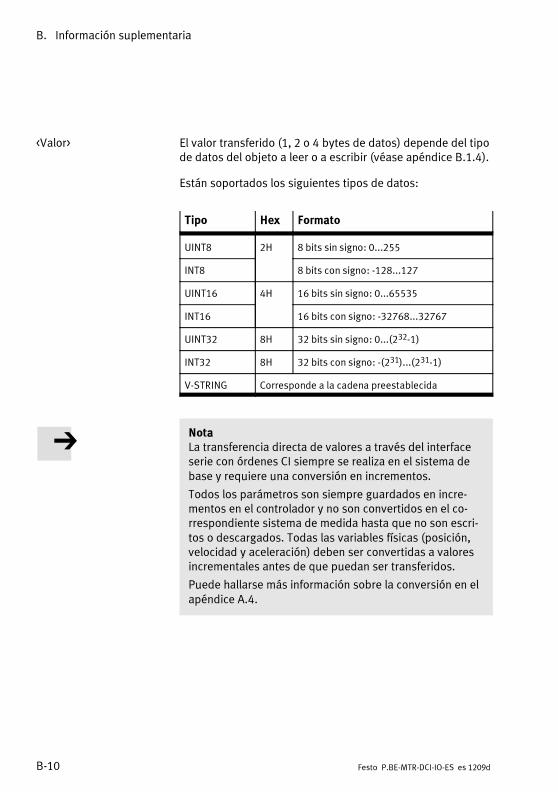
B. Información suplementaria
B-10 Festo P.BE-MTR-DCI-IO-ES es 1209d
<Valor> El valor transferido (1, 2 o 4 bytes de datos) depende del tipode datos del objeto a leer o a escribir (véase apéndice B.1.4).
Están soportados los siguientes tipos de datos:
Tipo Hex Formato
UINT8 2H 8 bits sin signo: 0...255
INT8 8 bits con signo: -128...127
UINT16 4H 16 bits sin signo: 0...65535
INT16 16 bits con signo: -32768...32767
UINT32 8H 32 bits sin signo: 0...(232-1)
INT32 8H 32 bits con signo: -(231)...(231-1)
V-STRING Corresponde a la cadena preestablecida
NotaLa transferencia directa de valores a través del interfaceserie con órdenes CI siempre se realiza en el sistema debase y requiere una conversión en incrementos.
Todos los parámetros son siempre guardados en incre-mentos en el controlador y no son convertidos en el co-rrespondiente sistema de medida hasta que no son escri-tos o descargados. Todas las variables físicas (posición,velocidad y aceleración) deben ser convertidas a valoresincrementales antes de que puedan ser transferidos.
Puede hallarse más información sobre la conversión en elapéndice A.4.
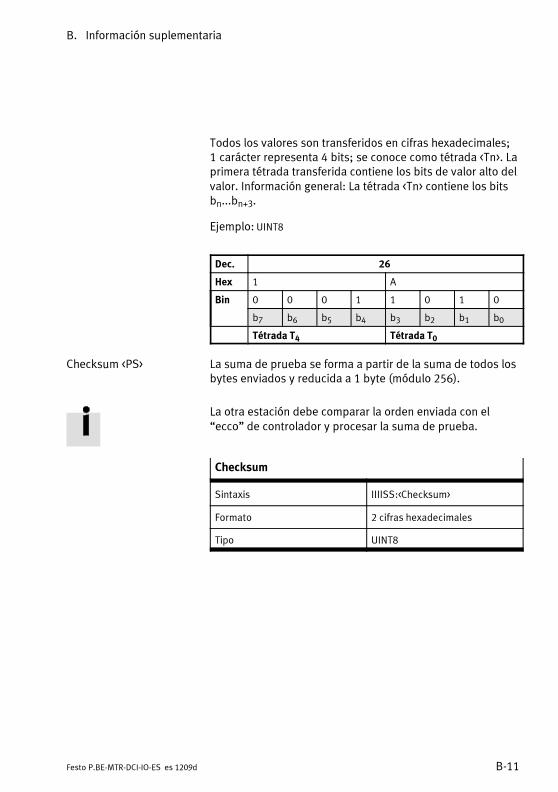
B. Información suplementaria
B-11Festo P.BE-MTR-DCI-IO-ES es 1209d
Todos los valores son transferidos en cifras hexadecimales;1 carácter representa 4 bits; se conoce como tétrada <Tn>. Laprimera tétrada transferida contiene los bits de valor alto delvalor. Información general: La tétrada <Tn> contiene los bitsbn...bn+3.
Ejemplo: UINT8
Dec. 26
Hex 1 A
Bin 0 0 0 1 1 0 1 0
b7 b6 b5 b4 b3 b2 b1 b0
Tétrada T4 Tétrada T0
Checksum <PS> La suma de prueba se forma a partir de la suma de todos losbytes enviados y reducida a 1 byte (módulo 256).
La otra estación debe comparar la orden enviada con el“ecco” de controlador y procesar la suma de prueba.
Checksum
Sintaxis IIIISS:<Checksum>
Formato 2 cifras hexadecimales
Tipo UINT8
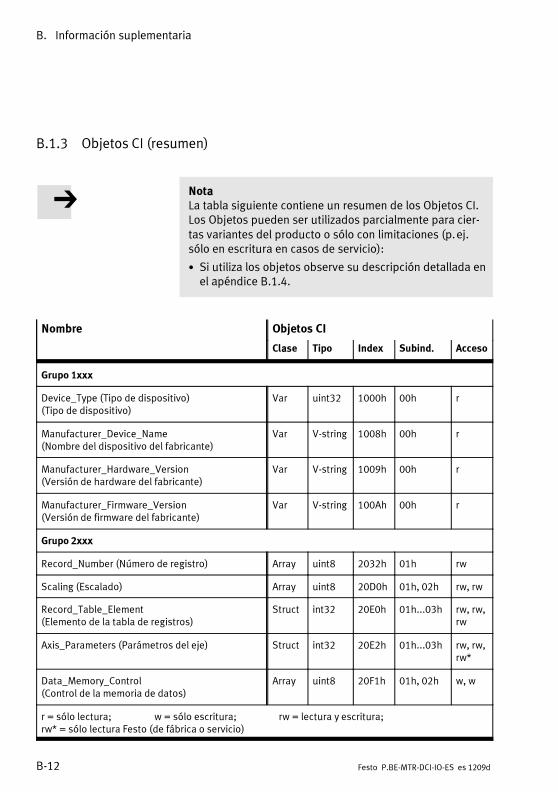
B. Información suplementaria
B-12 Festo P.BE-MTR-DCI-IO-ES es 1209d
B.1.3 Objetos CI (resumen)
NotaLa tabla siguiente contiene un resumen de los Objetos CI.Los Objetos pueden ser utilizados parcialmente para cier-tas variantes del producto o sólo con limitaciones (p.ej.sólo en escritura en casos de servicio):
• Si utiliza los objetos observe su descripción detallada enel apéndice B.1.4.
Nombre Objetos CI
Clase Tipo Index Subind. Acceso
Grupo 1xxx
Device_Type (Tipo de dispositivo)(Tipo de dispositivo)
Var uint32 1000h 00h r
Manufacturer_Device_Name(Nombre del dispositivo del fabricante)
Var V-string 1008h 00h r
Manufacturer_Hardware_Version(Versión de hardware del fabricante)
Var V-string 1009h 00h r
Manufacturer_Firmware_Version(Versión de firmware del fabricante)
Var V-string 100Ah 00h r
Grupo 2xxx
Record_Number (Número de registro) Array uint8 2032h 01h rw
Scaling (Escalado) Array uint8 20D0h 01h, 02h rw, rw
Record_Table_Element(Elemento de la tabla de registros)
Struct int32 20E0h 01h...03h rw, rw,rw
Axis_Parameters (Parámetros del eje) Struct int32 20E2h 01h...03h rw, rw,rw*
Data_Memory_Control(Control de la memoria de datos)
Array uint8 20F1h 01h, 02h w, w
r = sólo lectura; w = sólo escritura; rw = lectura y escritura;rw* = sólo lectura Festo (de fábrica o servicio)
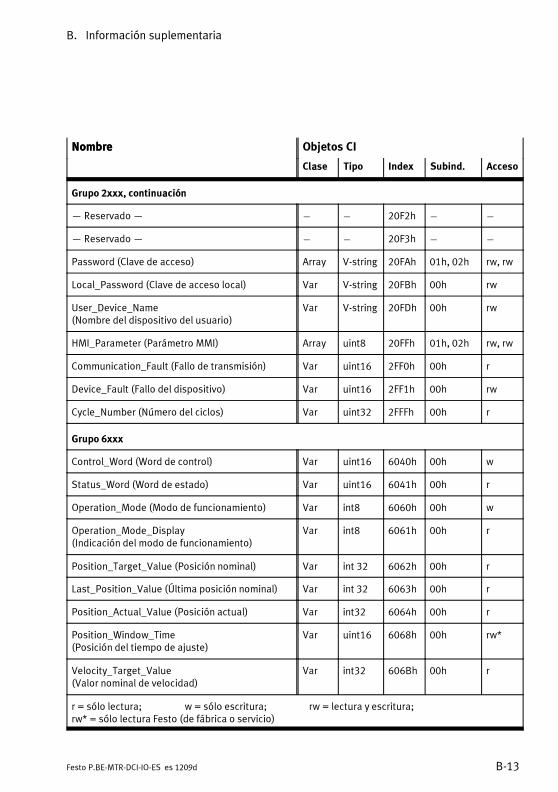
B. Información suplementaria
B-13Festo P.BE-MTR-DCI-IO-ES es 1209d
Nombre Objetos CINombre
AccesoSubind.IndexTipoClase
Grupo 2xxx, continuación
—Reservado— — — 20F2h — —
—Reservado— — — 20F3h — —
Password (Clave de acceso) Array V-string 20FAh 01h, 02h rw, rw
Local_Password (Clave de acceso local) Var V-string 20FBh 00h rw
User_Device_Name(Nombre del dispositivo del usuario)
Var V-string 20FDh 00h rw
HMI_Parameter (Parámetro MMI) Array uint8 20FFh 01h, 02h rw, rw
Communication_Fault (Fallo de transmisión) Var uint16 2FF0h 00h r
Device_Fault (Fallo del dispositivo) Var uint16 2FF1h 00h rw
Cycle_Number (Número del ciclos) Var uint32 2FFFh 00h r
Grupo 6xxx
Control_Word (Word de control) Var uint16 6040h 00h w
Status_Word (Word de estado) Var uint16 6041h 00h r
Operation_Mode (Modo de funcionamiento) Var int8 6060h 00h w
Operation_Mode_Display(Indicación del modo de funcionamiento)
Var int8 6061h 00h r
Position_Target_Value (Posición nominal) Var int 32 6062h 00h r
Last_Position_Value (Última posición nominal) Var int 32 6063h 00h r
Position_Actual_Value (Posición actual) Var int32 6064h 00h r
Position_Window_Time(Posición del tiempo de ajuste)
Var uint16 6068h 00h rw*
Velocity_Target_Value(Valor nominal de velocidad)
Var int32 606Bh 00h r
r = sólo lectura; w = sólo escritura; rw = lectura y escritura;rw* = sólo lectura Festo (de fábrica o servicio)
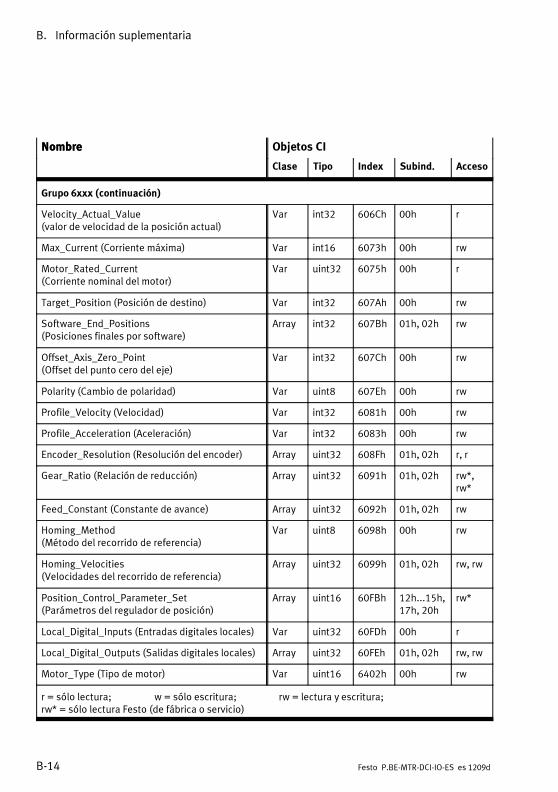
B. Información suplementaria
B-14 Festo P.BE-MTR-DCI-IO-ES es 1209d
Nombre Objetos CINombre
AccesoSubind.IndexTipoClase
Grupo 6xxx (continuación)
Velocity_Actual_Value(valor de velocidad de la posición actual)
Var int32 606Ch 00h r
Max_Current (Corriente máxima) Var int16 6073h 00h rw
Motor_Rated_Current(Corriente nominal del motor)
Var uint32 6075h 00h r
Target_Position (Posición de destino) Var int32 607Ah 00h rw
Software_End_Positions(Posiciones finales por software)
Array int32 607Bh 01h, 02h rw
Offset_Axis_Zero_Point(Offset del punto cero del eje)
Var int32 607Ch 00h rw
Polarity (Cambio de polaridad) Var uint8 607Eh 00h rw
Profile_Velocity (Velocidad) Var int32 6081h 00h rw
Profile_Acceleration (Aceleración) Var int32 6083h 00h rw
Encoder_Resolution (Resolución del encoder) Array uint32 608Fh 01h, 02h r, r
Gear_Ratio (Relación de reducción) Array uint32 6091h 01h, 02h rw*,rw*
Feed_Constant (Constante de avance) Array uint32 6092h 01h, 02h rw
Homing_Method(Método del recorrido de referencia)
Var uint8 6098h 00h rw
Homing_Velocities(Velocidades del recorrido de referencia)
Array uint32 6099h 01h, 02h rw, rw
Position_Control_Parameter_Set(Parámetros del regulador de posición)
Array uint16 60FBh 12h...15h,17h, 20h
rw*
Local_Digital_Inputs (Entradas digitales locales) Var uint32 60FDh 00h r
Local_Digital_Outputs (Salidas digitales locales) Array uint32 60FEh 01h, 02h rw, rw
Motor_Type (Tipo de motor) Var uint16 6402h 00h rw
r = sólo lectura; w = sólo escritura; rw = lectura y escritura;rw* = sólo lectura Festo (de fábrica o servicio)
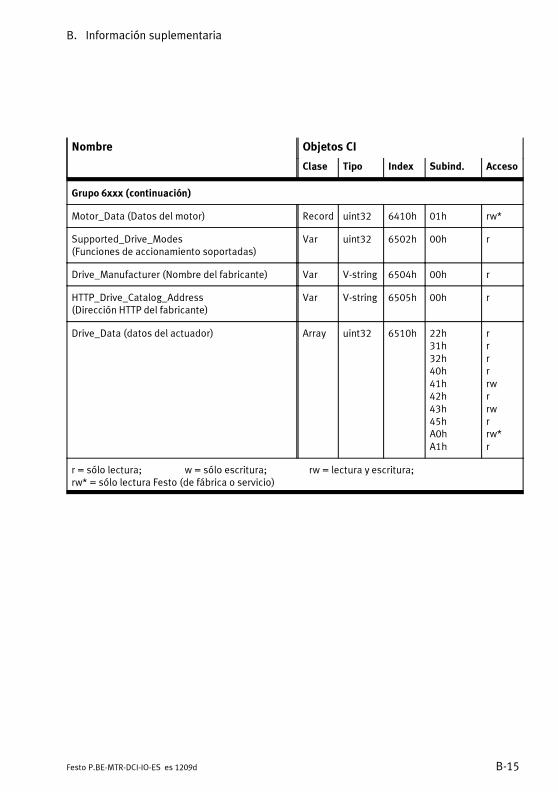
B. Información suplementaria
B-15Festo P.BE-MTR-DCI-IO-ES es 1209d
Nombre Objetos CI
Clase Tipo Index Subind. Acceso
Grupo 6xxx (continuación)
Motor_Data (Datos del motor) Record uint32 6410h 01h rw*
Supported_Drive_Modes(Funciones de accionamiento soportadas)
Var uint32 6502h 00h r
Drive_Manufacturer (Nombre del fabricante) Var V-string 6504h 00h r
HTTP_Drive_Catalog_Address(Dirección HTTP del fabricante)
Var V-string 6505h 00h r
Drive_Data (datos del actuador) Array uint32 6510h 22h31h32h40h41h42h43h45hA0hA1h
rrrrrwrrwrrw*r
r = sólo lectura; w = sólo escritura; rw = lectura y escritura;rw* = sólo lectura Festo (de fábrica o servicio)
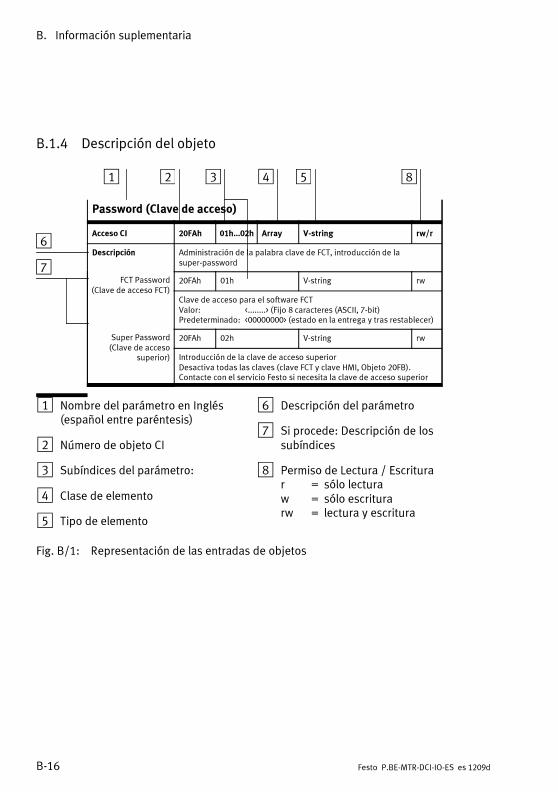
B. Información suplementaria
B-16 Festo P.BE-MTR-DCI-IO-ES es 1209d
B.1.4 Descripción del objeto
Password (Clave de acceso)
Acceso CI 20FAh 01h...02h Array V-string rw/r
Descripción Administración de la palabra clave de FCT, introducción de lasuper-password
FCT Password(Clave de acceso FCT)
20FAh 01h V-string rw
Clave de acceso para el software FCTValor: <........> (Fijo 8 caracteres (ASCII, 7-bit)Predeterminado: <00000000> (estado en la entrega y tras restablecer)
Super Password(Clave de acceso
superior)
20FAh 02h V-string rw
Introducción de la clave de acceso superiorDesactiva todas las claves (clave FCT y clave HMI, Objeto 20FB).Contacte con el servicio Festo si necesita la clave de acceso superior
1 Nombre del parámetro en Inglés(español entre paréntesis)
2 Número de objeto CI
3 Subíndices del parámetro:
4 Clase de elemento
5 Tipo de elemento
6 Descripción del parámetro
7 Si procede: Descripción de lossubíndices
8 Permiso de Lectura / Escriturar = sólo lecturaw = sólo escriturarw = lectura y escritura
Fig. B/1: Representación de las entradas de objetos
1 2 3 4 5
6
7
8
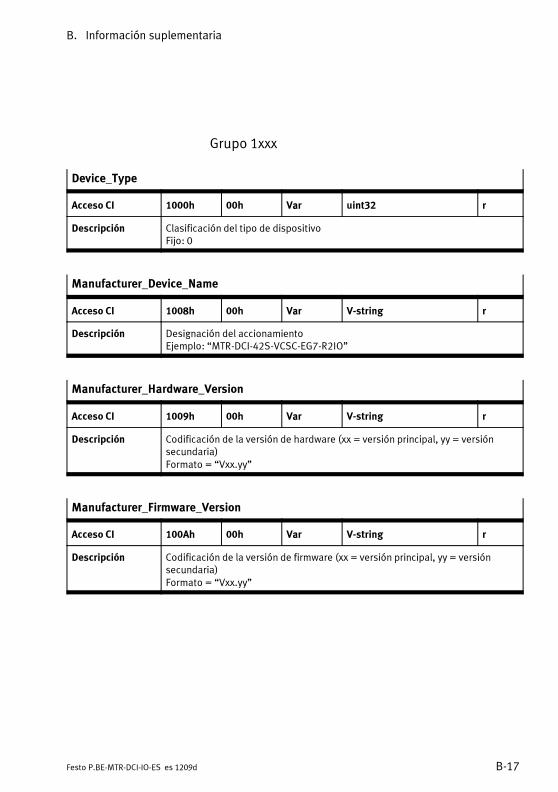
B. Información suplementaria
B-17Festo P.BE-MTR-DCI-IO-ES es 1209d
Grupo 1xxx
Device_Type
Acceso CI 1000h 00h Var uint32 r
Descripción Clasificación del tipo de dispositivoFijo: 0
Manufacturer_Device_Name
Acceso CI 1008h 00h Var V-string r
Descripción Designación del accionamientoEjemplo: “MTR-DCI-42S-VCSC-EG7-R2IO”
Manufacturer_Hardware_Version
Acceso CI 1009h 00h Var V-string r
Descripción Codificación de la versión de hardware (xx = versión principal, yy = versiónsecundaria)Formato = “Vxx.yy”
Manufacturer_Firmware_Version
Acceso CI 100Ah 00h Var V-string r
Descripción Codificación de la versión de firmware (xx = versión principal, yy = versiónsecundaria)Formato = “Vxx.yy”
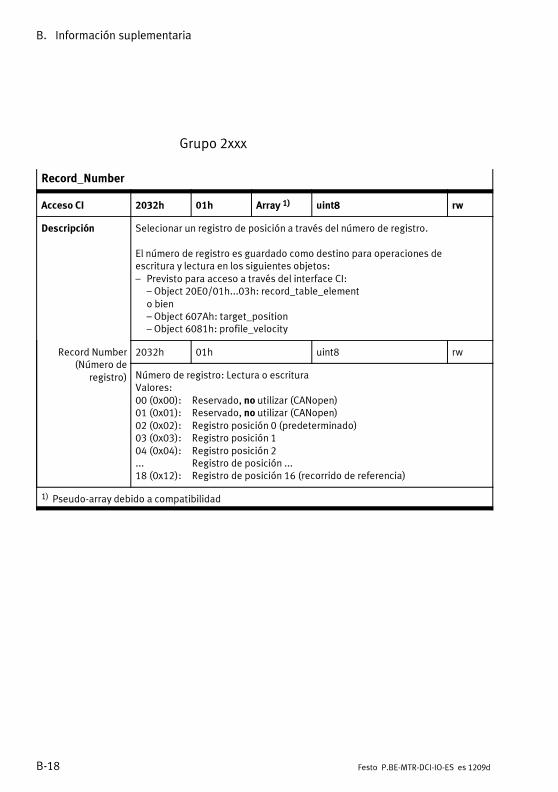
B. Información suplementaria
B-18 Festo P.BE-MTR-DCI-IO-ES es 1209d
Grupo 2xxx
Record_Number
Acceso CI 2032h 01h Array 1) uint8 rw
Descripción Selecionar un registro de posición a través del número de registro.
El número de registro es guardado como destino para operaciones deescritura y lectura en los siguientes objetos:– Previsto para acceso a través del interface CI:
– Object 20E0/01h...03h: record_table_elemento bien– Object 607Ah: target_position– Object 6081h: profile_velocity
Record Number(Número de
registro)
2032h 01h uint8 rw
Número de registro: Lectura o escrituraValores:00 (0x00): Reservado, no utilizar (CANopen)01 (0x01): Reservado, no utilizar (CANopen)02 (0x02): Registro posición 0 (predeterminado)03 (0x03): Registro posición 104 (0x04): Registro posición 2... Registro de posición ...18 (0x12): Registro de posición 16 (recorrido de referencia)
1) Pseudo-array debido a compatibilidad
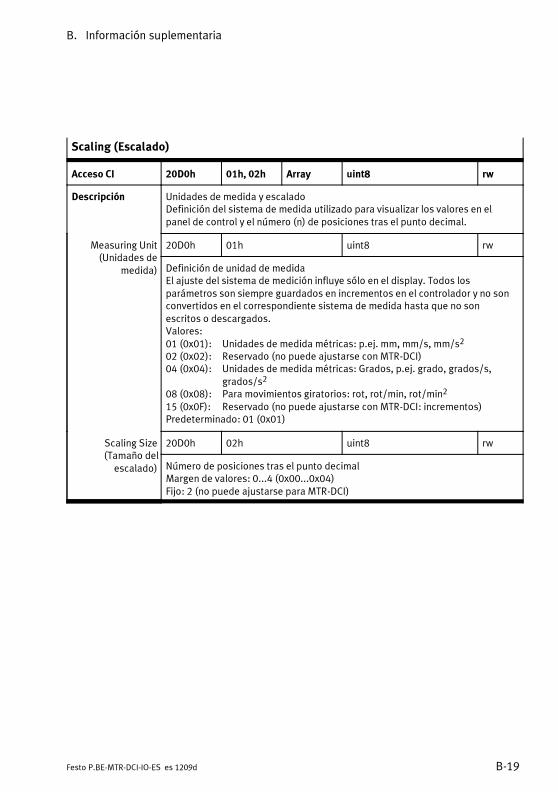
B. Información suplementaria
B-19Festo P.BE-MTR-DCI-IO-ES es 1209d
Scaling (Escalado)
Acceso CI 20D0h 01h, 02h Array uint8 rw
Descripción Unidades de medida y escaladoDefinición del sistema de medida utilizado para visualizar los valores en elpanel de control y el número (n) de posiciones tras el punto decimal.
Measuring Unit(Unidades de
medida)
20D0h 01h uint8 rw
Definición de unidad de medidaEl ajuste del sistema de medición influye sólo en el display. Todos losparámetros son siempre guardados en incrementos en el controlador y no sonconvertidos en el correspondiente sistema de medida hasta que no sonescritos o descargados.Valores:01 (0x01): Unidades de medida métricas: p.ej. mm, mm/s, mm/s2
02 (0x02): Reservado (no puede ajustarse con MTR-DCI)04 (0x04): Unidades de medida métricas: Grados, p.ej. grado, grados/s,
grados/s2
08 (0x08): Para movimientos giratorios: rot, rot/min, rot/min2
15 (0x0F): Reservado (no puede ajustarse con MTR-DCI: incrementos)Predeterminado: 01 (0x01)
Scaling Size(Tamaño delescalado)
20D0h 02h uint8 rw
Número de posiciones tras el punto decimalMargen de valores: 0...4 (0x00...0x04)Fijo: 2 (no puede ajustarse para MTR-DCI)
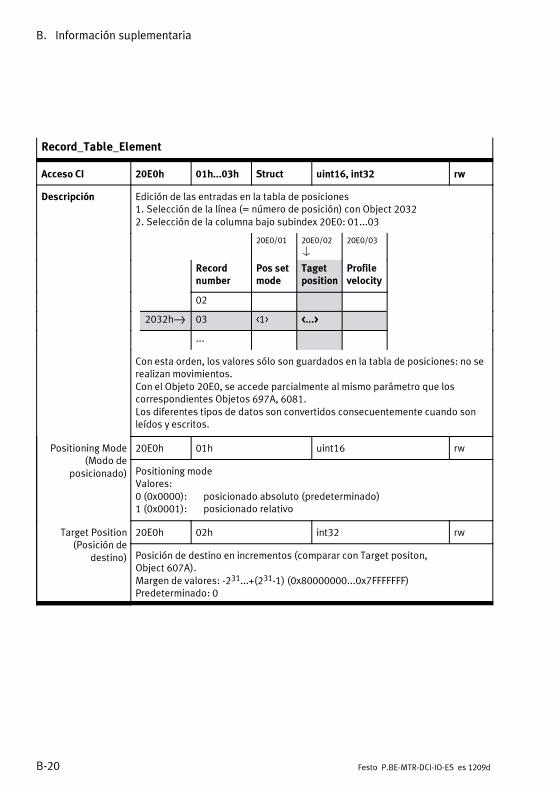
B. Información suplementaria
B-20 Festo P.BE-MTR-DCI-IO-ES es 1209d
Record_Table_Element
Acceso CI 20E0h 01h...03h Struct uint16, int32 rw
Descripción Edición de las entradas en la tabla de posiciones1. Selección de la línea (= número de posición) con Object 20322. Selección de la columna bajo subindex 20E0: 01...03
20E0/01 20E0/02V
20E0/03
Recordnumber
Pos setmode
Tagetposition
Profilevelocity
02
2032h} 03 <1> <...>
...
Con esta orden, los valores sólo son guardados en la tabla de posiciones: no serealizan movimientos.Con el Objeto 20E0, se accede parcialmente al mismo parámetro que loscorrespondientes Objetos 697A, 6081.Los diferentes tipos de datos son convertidos consecuentemente cuando sonleídos y escritos.
Positioning Mode(Modo de
posicionado)
20E0h 01h uint16 rw
Positioning modeValores:0 (0x0000): posicionado absoluto (predeterminado)1 (0x0001): posicionado relativo
Target Position(Posición de
destino)
20E0h 02h int32 rw
Posición de destino en incrementos (comparar con Target positon,Object 607A).Margen de valores: -231...+(231-1) (0x80000000...0x7FFFFFFF)Predeterminado: 0
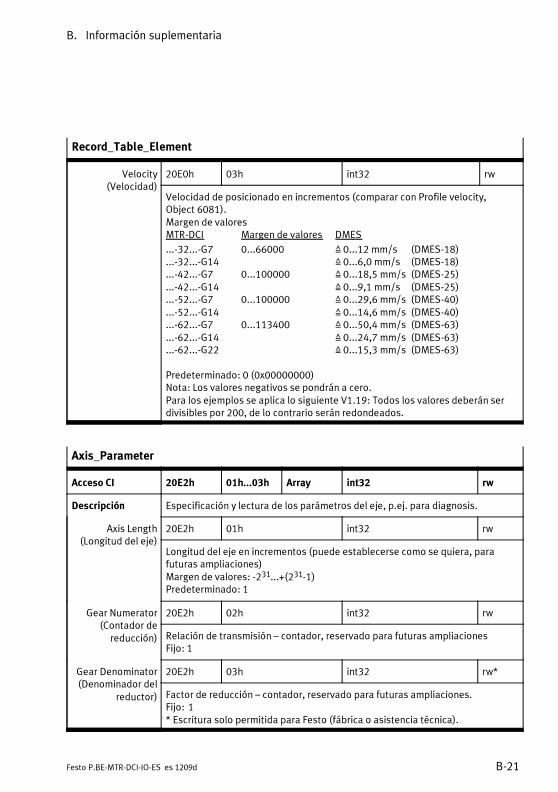
B. Información suplementaria
B-21Festo P.BE-MTR-DCI-IO-ES es 1209d
Record_Table_Element
Velocity(Velocidad)
20E0h 03h int32 rw
Velocidad de posicionado en incrementos (comparar con Profile velocity,Object 6081).Margen de valoresMTR-DCI Margen de valores DMES
...-32...-G7 0...66000 Z 0...12 mm/s (DMES-18)
...-32...-G14 Z 0...6,0 mm/s (DMES-18)
...-42...-G7 0...100000 Z 0...18,5 mm/s (DMES-25)
...-42...-G14 Z 0...9,1 mm/s (DMES-25)
...-52...-G7 0...100000 Z 0...29,6 mm/s (DMES-40)
...-52...-G14 Z 0...14,6 mm/s (DMES-40)
...-62...-G7 0...113400 Z 0...50,4 mm/s (DMES-63)
...-62...-G14 Z 0...24,7 mm/s (DMES-63)
...-62...-G22 Z 0...15,3 mm/s (DMES-63)
Predeterminado: 0 (0x00000000)Nota: Los valores negativos se pondrán a cero.Para los ejemplos se aplica lo siguiente V1.19: Todos los valores deberán serdivisibles por 200, de lo contrario serán redondeados.
Axis_Parameter
Acceso CI 20E2h 01h...03h Array int32 rw
Descripción Especificación y lectura de los parámetros del eje, p.ej. para diagnosis.
Axis Length(Longitud del eje)
20E2h 01h int32 rw
Longitud del eje en incrementos (puede establecerse como se quiera, parafuturas ampliaciones)Margen de valores: -231...+(231-1)Predeterminado: 1
Gear Numerator(Contador de
reducción)
20E2h 02h int32 rw
Relación de transmisión – contador, reservado para futuras ampliacionesFijo: 1
Gear Denominator(Denominador del
reductor)
20E2h 03h int32 rw*
Factor de reducción – contador, reservado para futuras ampliaciones.Fijo: 1* Escritura solo permitida para Festo (fábrica o asistencia técnica).
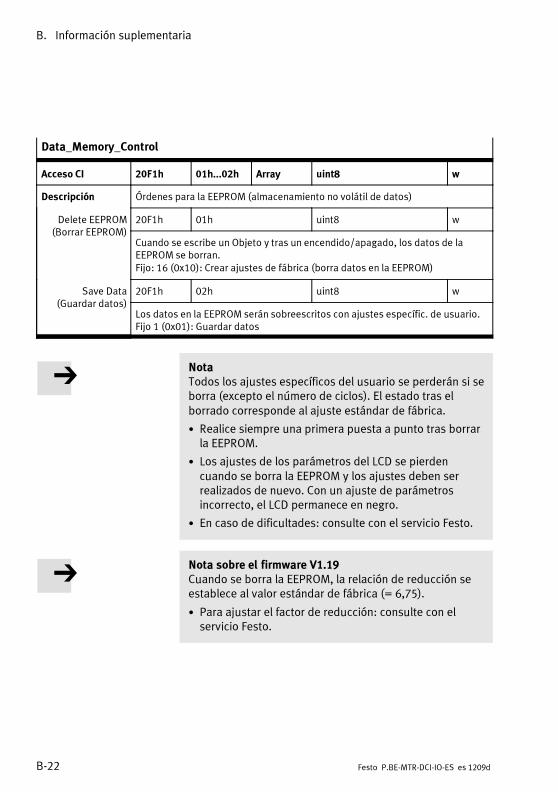
B. Información suplementaria
B-22 Festo P.BE-MTR-DCI-IO-ES es 1209d
Data_Memory_Control
Acceso CI 20F1h 01h...02h Array uint8 w
Descripción Órdenes para la EEPROM (almacenamiento no volátil de datos)
Delete EEPROM(Borrar EEPROM)
20F1h 01h uint8 w
Cuando se escribe un Objeto y tras un encendido/apagado, los datos de laEEPROM se borran.Fijo: 16 (0x10): Crear ajustes de fábrica (borra datos en la EEPROM)
Save Data(Guardar datos)
20F1h 02h uint8 w
Los datos en la EEPROM serán sobreescritos con ajustes específic. de usuario.Fijo 1 (0x01): Guardar datos
NotaTodos los ajustes específicos del usuario se perderán si seborra (excepto el número de ciclos). El estado tras elborrado corresponde al ajuste estándar de fábrica.
• Realice siempre una primera puesta a punto tras borrarla EEPROM.
• Los ajustes de los parámetros del LCD se pierdencuando se borra la EEPROM y los ajustes deben serrealizados de nuevo. Con un ajuste de parámetrosincorrecto, el LCD permanece en negro.
• En caso de dificultades: consulte con el servicio Festo.
Nota sobre el firmware V1.19Cuando se borra la EEPROM, la relación de reducción seestablece al valor estándar de fábrica (= 6,75).
• Para ajustar el factor de reducción: consulte con elservicio Festo.

B. Información suplementaria
B-23Festo P.BE-MTR-DCI-IO-ES es 1209d
Password (Clave de acceso)
Acceso CI 20FAh 01h, 02h Array V-string rw
Descripción Administración de la palabra clave de FCT, introducción de la super-password
FCT Password(Clave de acceso
FCT)
20FAh 01h V-string rw
Clave de acceso para el software FCTValor: <........> (Fijo 8 caracteres (ASCII, 7-bit)Predeterminado: <00000000> (estado en la entrega y tras restablecer)
Super Password(Clave de acceso
superior)
20FAh 02h V-string rw
Introducción de la clave de acceso superiorDesactiva todas las claves (clave FCT y clave HMI, Objeto 20FB). Contacte conel servicio Festo si necesita la super password.
Local_Password
Acceso CI 20FBh 00h Var V-string rw
Descripción Administración de la password HMI (local) para habilitar ciertas funciones quese realizan a través del panel de control.Valor: <........> (Fijo 8 caracteres (ASCII, 7-bit)
Sólo se evalúan los 3 primeros caracteresPredeterminado: <00000000> (estado en la entrega y tras restablecer)
User_Device_Name
Acceso CI 20FDh 00h Var V-string rw
Descripción Designación del accionamiento por el usuario, máx. 8 caracters (ASCII, 7-bit).Predeterminado: <motor001>
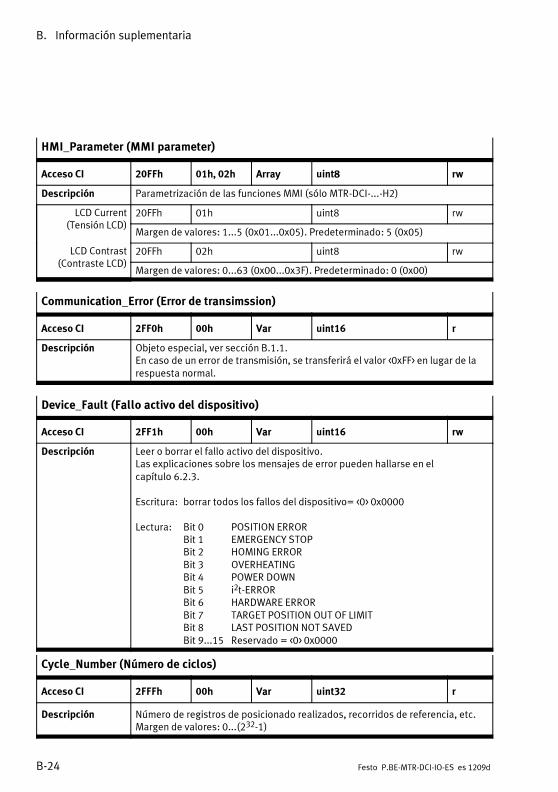
B. Información suplementaria
B-24 Festo P.BE-MTR-DCI-IO-ES es 1209d
HMI_Parameter (MMI parameter)
Acceso CI 20FFh 01h, 02h Array uint8 rw
Descripción Parametrización de las funciones MMI (sólo MTR-DCI-...-H2)
LCD Current(Tensión LCD)
20FFh 01h uint8 rw
Margen de valores: 1...5 (0x01...0x05). Predeterminado: 5 (0x05)
LCD Contrast(Contraste LCD)
20FFh 02h uint8 rw
Margen de valores: 0...63 (0x00...0x3F). Predeterminado: 0 (0x00)
Communication_Error (Error de transimssion)
Acceso CI 2FF0h 00h Var uint16 r
Descripción Objeto especial, ver sección B.1.1.En caso de un error de transmisión, se transferirá el valor <0xFF> en lugar de larespuesta normal.
Device_Fault (Fallo activo del dispositivo)
Acceso CI 2FF1h 00h Var uint16 rw
Descripción Leer o borrar el fallo activo del dispositivo.Las explicaciones sobre los mensajes de error pueden hallarse en elcapítulo 6.2.3.
Escritura: borrar todos los fallos del dispositivo= <0> 0x0000
Lectura: Bit 0 POSITION ERRORBit 1 EMERGENCY STOPBit 2 HOMING ERRORBit 3 OVERHEATINGBit 4 POWER DOWNBit 5 i2t-ERRORBit 6 HARDWARE ERRORBit 7 TARGET POSITION OUT OF LIMITBit 8 LAST POSITION NOT SAVEDBit 9...15 Reservado = <0> 0x0000
Cycle_Number (Número de ciclos)
Acceso CI 2FFFh 00h Var uint32 r
Descripción Número de registros de posicionado realizados, recorridos de referencia, etc.Margen de valores: 0...(232-1)
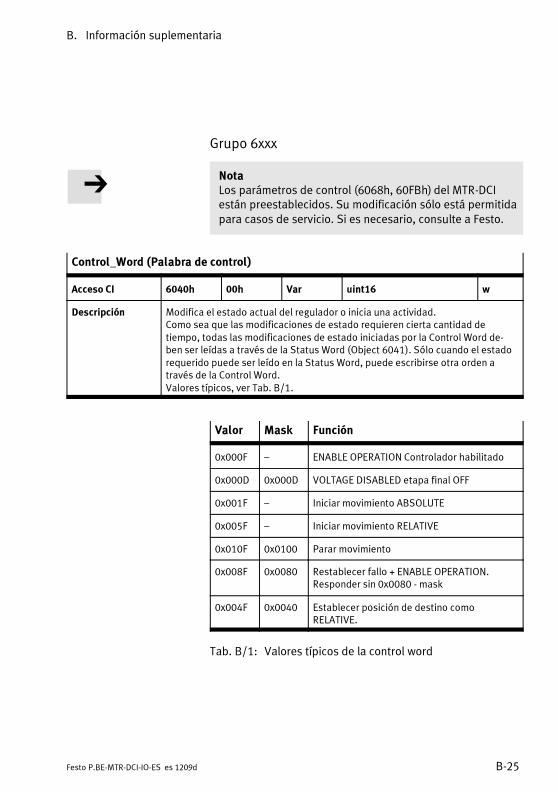
B. Información suplementaria
B-25Festo P.BE-MTR-DCI-IO-ES es 1209d
Grupo 6xxx
NotaLos parámetros de control (6068h, 60FBh) del MTR-DCIestán preestablecidos. Su modificación sólo está permitidapara casos de servicio. Si es necesario, consulte a Festo.
Control_Word (Palabra de control)
Acceso CI 6040h 00h Var uint16 w
Descripción Modifica el estado actual del regulador o inicia una actividad.Como sea que las modificaciones de estado requieren cierta cantidad detiempo, todas las modificaciones de estado iniciadas por la Control Word de-ben ser leídas a través de la Status Word (Object 6041). Sólo cuando el estadorequerido puede ser leído en la Status Word, puede escribirse otra orden através de la Control Word.Valores típicos, ver Tab. B/1.
Valor Mask Función
0x000F – ENABLE OPERATION Controlador habilitado
0x000D 0x000D VOLTAGE DISABLED etapa final OFF
0x001F – Iniciar movimiento ABSOLUTE
0x005F – Iniciar movimiento RELATIVE
0x010F 0x0100 Parar movimiento
0x008F 0x0080 Restablecer fallo + ENABLE OPERATION.Responder sin 0x0080 - mask
0x004F 0x0040 Establecer posición de destino comoRELATIVE.
Tab. B/1: Valores típicos de la control word
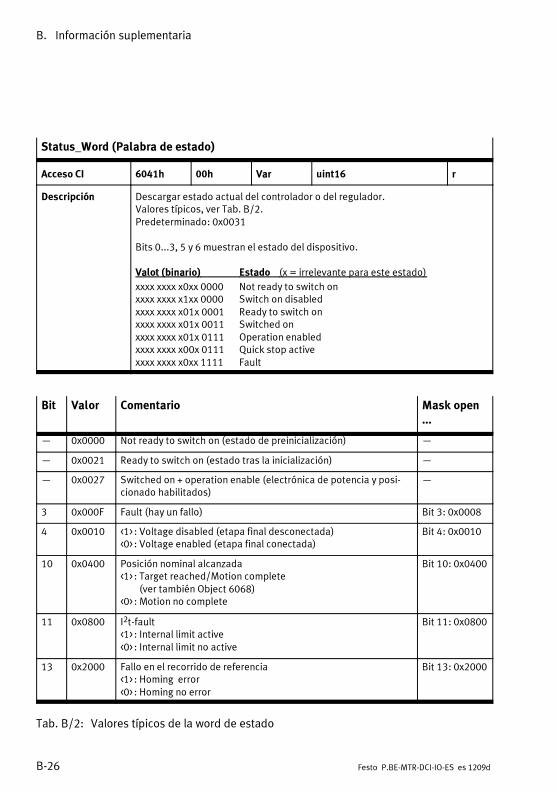
B. Información suplementaria
B-26 Festo P.BE-MTR-DCI-IO-ES es 1209d
Status_Word (Palabra de estado)
Acceso CI 6041h 00h Var uint16 r
Descripción Descargar estado actual del controlador o del regulador.Valores típicos, ver Tab. B/2.Predeterminado: 0x0031
Bits 0...3, 5 y 6 muestran el estado del dispositivo.
Valot (binario) Estado (x = irrelevante para este estado)xxxx xxxx x0xx 0000 Not ready to switch onxxxx xxxx x1xx 0000 Switch on disabledxxxx xxxx x01x 0001 Ready to switch onxxxx xxxx x01x 0011 Switched onxxxx xxxx x01x 0111 Operation enabledxxxx xxxx x00x 0111 Quick stop activexxxx xxxx x0xx 1111 Fault
Bit Valor Comentario Mask open...
— 0x0000 Not ready to switch on (estado de preinicialización) —
— 0x0021 Ready to switch on (estado tras la inicialización) —
— 0x0027 Switched on + operation enable (electrónica de potencia y posi-cionado habilitados)
—
3 0x000F Fault (hay un fallo) Bit 3: 0x0008
4 0x0010 <1> : Voltage disabled (etapa final desconectada)<0> : Voltage enabled (etapa final conectada)
Bit 4: 0x0010
10 0x0400 Posición nominal alcanzada<1> : Target reached/Motion complete
(ver también Object 6068)<0> : Motion no complete
Bit 10: 0x0400
11 0x0800 I2t-fault<1> : Internal limit active<0> : Internal limit no active
Bit 11: 0x0800
13 0x2000 Fallo en el recorrido de referencia<1> : Homing error<0> : Homing no error
Bit 13: 0x2000
Tab. B/2: Valores típicos de la word de estado
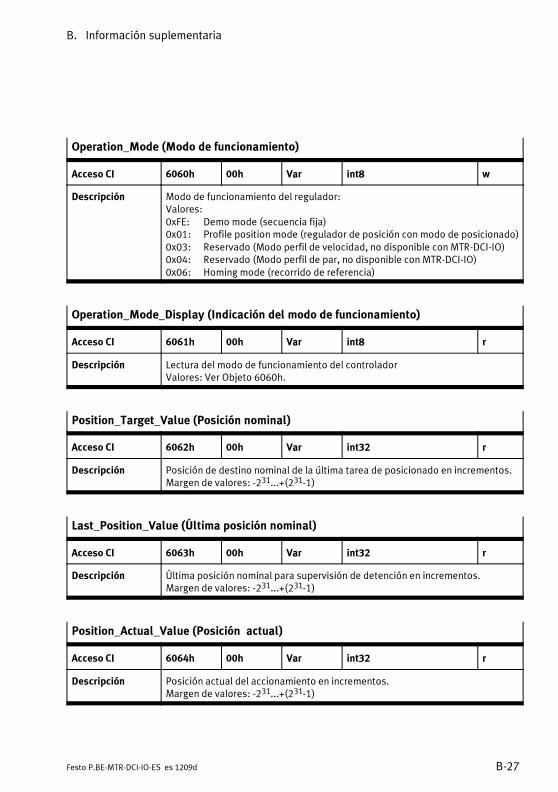
B. Información suplementaria
B-27Festo P.BE-MTR-DCI-IO-ES es 1209d
Operation_Mode (Modo de funcionamiento)
Acceso CI 6060h 00h Var int8 w
Descripción Modo de funcionamiento del regulador:Valores:0xFE: Demo mode (secuencia fija)0x01: Profile position mode (regulador de posición con modo de posicionado)0x03: Reservado (Modo perfil de velocidad, no disponible con MTR-DCI-IO)0x04: Reservado (Modo perfil de par, no disponible con MTR-DCI-IO)0x06: Homing mode (recorrido de referencia)
Operation_Mode_Display (Indicación del modo de funcionamiento)
Acceso CI 6061h 00h Var int8 r
Descripción Lectura del modo de funcionamiento del controladorValores: Ver Objeto 6060h.
Position_Target_Value (Posición nominal)
Acceso CI 6062h 00h Var int32 r
Descripción Posición de destino nominal de la última tarea de posicionado en incrementos.Margen de valores: -231...+(231-1)
Last_Position_Value (Última posición nominal)
Acceso CI 6063h 00h Var int32 r
Descripción Última posición nominal para supervisión de detención en incrementos.Margen de valores: -231...+(231-1)
Position_Actual_Value (Posición actual)
Acceso CI 6064h 00h Var int32 r
Descripción Posición actual del accionamiento en incrementos.Margen de valores: -231...+(231-1)

B. Información suplementaria
B-28 Festo P.BE-MTR-DCI-IO-ES es 1209d
Position_Window_Time (Tempo de reajuste de posición)
Acceso CI 6068h 00h Var uint16 rw*
Descripción Tiempo de ajuste en milisegundos.Si la posición real ha estado en la ventana de posición de destino durante estetiempo, en la palabra de estado (objeto 6041) se activa el bit “Target reached”(destino alcanzado).Margen de valores: 1...30000Por defecto:MTR-DCI-32/42...: 100 msMTR-DCI-52...: 100 msMTR-DCI-62...: 400 ms* Escritura solo permitida para Festo (fábrica o asistencia técnica).
Velocity_Target_Value (Valor nominal de velocidad)
Acceso CI 606Bh 00h Var int32 r
Descripción Valor de velocidad nominal actual del regulador de velocidad en incrementos.Margen de valores: -231...+(231-1)
Velocity_Actual_Value (Valor de velocidad nominal actual)
Acceso CI 606Ch 00h Var int32 r
Descripción Valor de velocidad nominal actual del regulador de velocidad en incrementos.Margen de valores: -231...+(231-1)
Max_Current (Corriente máxima)
Acceso CI 6073h 00h Var uint16 rw
Descripción Corriente máxima del motor en 1/1000 de la corriente nominal especificada.Idántico al Objeto 6510/41. No es necesaria la adaptación para el eje de posi-cioando DMESEnmodo de recorrido de referencia: Valor nominal para el regulador de co-rriente. Limita la fuerza del motor durante el recorrido de referencia hacia eltope y, en caso de fallo, protege la parada durante el recorrido de referencia aun interruptor de referencia.Observe la la limitación de corriente también limita la velocidad máxima posiblede acceso y, por ello, no puede alcanzarse la velocidad nominal (p.ej. en funcio-namiento vertical) o no se realiza el recorrido de referencia.Margen de valores: 1...2000 (0x0001...0x07D0)Predeterminado: 1500 (0x05DC) = corriente nominal del motor x 1,5
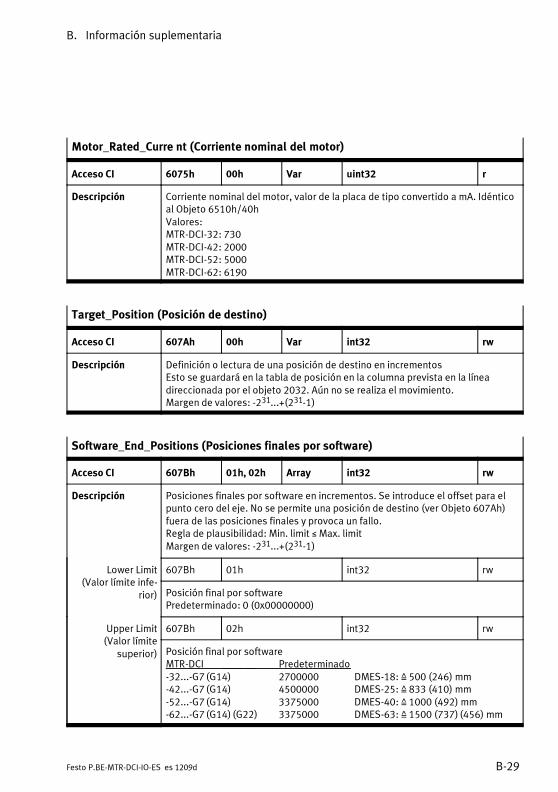
B. Información suplementaria
B-29Festo P.BE-MTR-DCI-IO-ES es 1209d
Motor_Rated_Curre nt (Corriente nominal del motor)
Acceso CI 6075h 00h Var uint32 r
Descripción Corriente nominal del motor, valor de la placa de tipo convertido a mA. Idénticoal Objeto 6510h/40hValores:MTR-DCI-32: 730MTR-DCI-42: 2000MTR-DCI-52: 5000MTR-DCI-62: 6190
Target_Position (Posición de destino)
Acceso CI 607Ah 00h Var int32 rw
Descripción Definición o lectura de una posición de destino en incrementosEsto se guardará en la tabla de posición en la columna prevista en la líneadireccionada por el objeto 2032. Aún no se realiza el movimiento.Margen de valores: -231...+(231-1)
Software_End_Positions (Posiciones finales por software)
Acceso CI 607Bh 01h, 02h Array int32 rw
Descripción Posiciones finales por software en incrementos. Se introduce el offset para elpunto cero del eje. No se permite una posición de destino (ver Objeto 607Ah)fuera de las posiciones finales y provoca un fallo.Regla de plausibilidad: Min. limit ≤ Max. limitMargen de valores: -231...+(231-1)
Lower Limit(Valor límite infe-
rior)
607Bh 01h int32 rw
Posición final por softwarePredeterminado: 0 (0x00000000)
Upper Limit(Valor límite
superior)
607Bh 02h int32 rw
Posición final por softwareMTR-DCI ______ Predeterminado-32...-G7 (G14) 2700000 DMES-18: Z 500 (246) mm-42...-G7 (G14) 4500000 DMES-25: Z 833 (410) mm-52...-G7 (G14) 3375000 DMES-40: Z 1000 (492) mm-62...-G7 (G14) (G22) 3375000 DMES-63: Z 1500 (737) (456) mm

B. Información suplementaria
B-30 Festo P.BE-MTR-DCI-IO-ES es 1209d
Offset_Axis_Zero_Point (Desplaziamiento del punto cero del eje)
Acceso CI 607Ch 00h Var int32 rw
Descripción Offset del punto cero del eje en incrementos.El offset del punto cero del eje (home offset) define el punto cero del eje <AZ>como el punto de base de medidas relativo al punto de referencia físico <REF>.El punto cero del eje (AZ) se calcula a partir de: AZ = REF + offset del punto cerodel eje.El punto cero del eje es el punto de base para el punto cero del proyecto <PZ> ypara las posiciones finales por software. Todas las operaciones de posicionadose refieren al punto cero del proyecto. En el MTR-DCI el punto cero del proyectoes idéntico al punto cero del eje.Predeterminado: 0 (0x00000000)Margen de valores: -231...+(231-1)
Polarity (Inversión de polaridad)
Acceso CI 607Eh 00h Var uint8 rw
Descripción La “dirección de actuación” de los valores de posición es transpuesto.Predeterminado: 0 (0x00)Valores:0 (0x00) = valor de posición (vector) normal128 (0x80) = vector del valor de posición invertido – multiplicado por -1)
Profile_Velocity (Velocidad)
Acceso CI 6081h 00h Var int32 rw
Descripción Velocidad final para un movimiento de posicionado en incrementos/sEsto se guardará en la tabla de posición en la columna prevista en la líneadireccionada por el Objeto CI 2032. Aún no se realiza el movimiento.Predeterminado: 0 (0x00000000)Margen de valores:MTR-DCI Margen de valores...-32...-G7 (G14) 0...66000 DMES-18: Z 0...12 (6) mm/s...-42...-G7 (G14) 0...100000 DMES-25: Z 0...18,5 (9,1) mm/s...-52...-G7 (G14) 0...100000 DMES-40: Z 0...29,6 (14,6) mm/s...-62...-G7 (G14) (G22) 0...113400 DMES-63: Z 0...50,4 (24,7) (15,3) mm/s
Se aplica lo siguiente al firmware V1.19: El valor debe ser divisible por 200, delo contrario será redondeado al siguiente valor permitido.
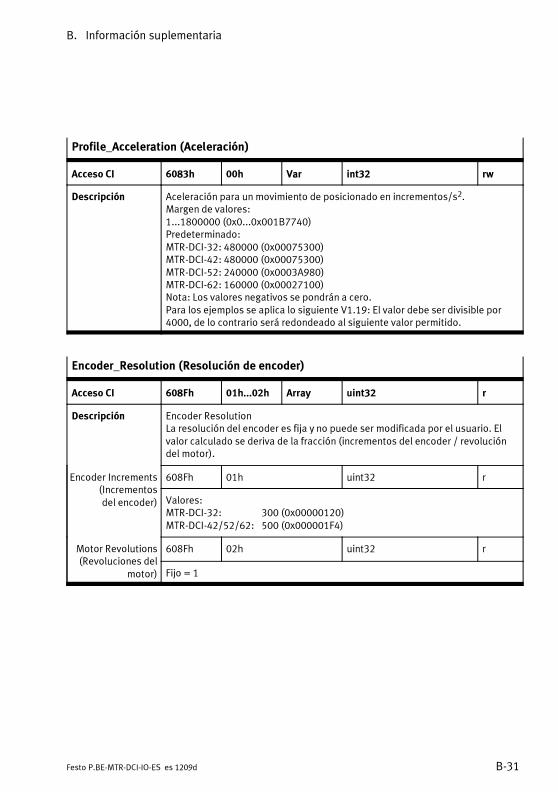
B. Información suplementaria
B-31Festo P.BE-MTR-DCI-IO-ES es 1209d
Profile_Acceleration (Aceleración)
Acceso CI 6083h 00h Var int32 rw
Descripción Aceleración para un movimiento de posicionado en incrementos/s2.Margen de valores:1...1800000 (0x0...0x001B7740)Predeterminado:MTR-DCI-32: 480000 (0x00075300)MTR-DCI-42: 480000 (0x00075300)MTR-DCI-52: 240000 (0x0003A980)MTR-DCI-62: 160000 (0x00027100)Nota: Los valores negativos se pondrán a cero.Para los ejemplos se aplica lo siguiente V1.19: El valor debe ser divisible por4000, de lo contrario será redondeado al siguiente valor permitido.
Encoder_Resolution (Resolución de encoder)
Acceso CI 608Fh 01h...02h Array uint32 r
Descripción Encoder ResolutionLa resolución del encoder es fija y no puede ser modificada por el usuario. Elvalor calculado se deriva de la fracción (incrementos del encoder / revolucióndel motor).
Encoder Increments(Incrementosdel encoder)
608Fh 01h uint32 r
Valores:MTR-DCI-32: 300 (0x00000120)MTR-DCI-42/52/62: 500 (0x000001F4)
Motor Revolutions(Revoluciones del
motor)
608Fh 02h uint32 r
Fijo = 1
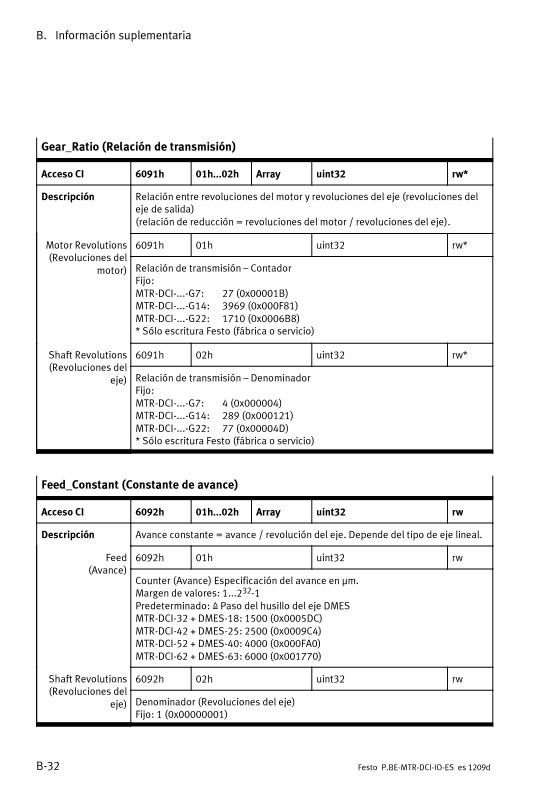
B. Información suplementaria
B-32 Festo P.BE-MTR-DCI-IO-ES es 1209d
Gear_Ratio (Relación de transmisión)
Acceso CI 6091h 01h...02h Array uint32 rw*
Descripción Relación entre revoluciones del motor y revoluciones del eje (revoluciones deleje de salida)(relación de reducción = revoluciones del motor / revoluciones del eje).
Motor Revolutions(Revoluciones del
motor)
6091h 01h uint32 rw*
Relación de transmisión – ContadorFijo:MTR-DCI-...-G7: 27 (0x00001B)MTR-DCI-...-G14: 3969 (0x000F81)MTR-DCI-...-G22: 1710 (0x0006B8)* Sólo escritura Festo (fábrica o servicio)
Shaft Revolutions(Revoluciones del
eje)
6091h 02h uint32 rw*
Relación de transmisión – DenominadorFijo:MTR-DCI-...-G7: 4 (0x000004)MTR-DCI-...-G14: 289 (0x000121)MTR-DCI-...-G22: 77 (0x00004D)* Sólo escritura Festo (fábrica o servicio)
Feed_Constant (Constante de avance)
Acceso CI 6092h 01h...02h Array uint32 rw
Descripción Avance constante = avance / revolución del eje. Depende del tipo de eje lineal.
Feed(Avance)
6092h 01h uint32 rw
Counter (Avance) Especificación del avance en μm.Margen de valores: 1...232-1Predeterminado: Z Paso del husillo del eje DMESMTR-DCI-32 + DMES-18: 1500 (0x0005DC)MTR-DCI-42 + DMES-25: 2500 (0x0009C4)MTR-DCI-52 + DMES-40: 4000 (0x000FA0)MTR-DCI-62 + DMES-63: 6000 (0x001770)
Shaft Revolutions(Revoluciones del
eje)
6092h 02h uint32 rw
Denominador (Revoluciones del eje)Fijo: 1 (0x00000001)
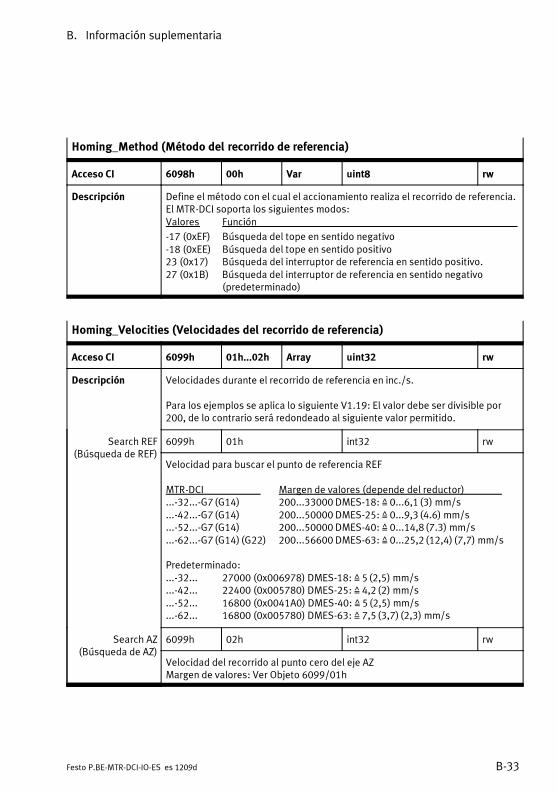
B. Información suplementaria
B-33Festo P.BE-MTR-DCI-IO-ES es 1209d
Homing_Method (Método del recorrido de referencia)
Acceso CI 6098h 00h Var uint8 rw
Descripción Define el método con el cual el accionamiento realiza el recorrido de referencia.El MTR-DCI soporta los siguientes modos:Valores Función
-17 (0xEF) Búsqueda del tope en sentido negativo-18 (0xEE) Búsqueda del tope en sentido positivo23 (0x17) Búsqueda del interruptor de referencia en sentido positivo.27 (0x1B) Búsqueda del interruptor de referencia en sentido negativo
(predeterminado)
Homing_Velocities (Velocidades del recorrido de referencia)
Acceso CI 6099h 01h...02h Array uint32 rw
Descripción Velocidades durante el recorrido de referencia en inc./s.
Para los ejemplos se aplica lo siguiente V1.19: El valor debe ser divisible por200, de lo contrario será redondeado al siguiente valor permitido.
Search REF(Búsqueda de REF)
6099h 01h int32 rw
Velocidad para buscar el punto de referencia REF
MTR-DCI Margen de valores (depende del reductor)...-32...-G7 (G14) 200...33000 DMES-18: Z 0...6,1 (3) mm/s...-42...-G7 (G14) 200...50000 DMES-25: Z 0...9,3 (4.6) mm/s...-52...-G7 (G14) 200...50000 DMES-40: Z 0...14,8 (7.3) mm/s...-62...-G7 (G14) (G22) 200...56600 DMES-63: Z 0...25,2 (12,4) (7,7) mm/s
Predeterminado:...-32... 27000 (0x006978) DMES-18: Z 5 (2,5) mm/s...-42... 22400 (0x005780) DMES-25: Z 4,2 (2) mm/s...-52... 16800 (0x0041A0) DMES-40: Z 5 (2,5) mm/s...-62... 16800 (0x005780) DMES-63: Z 7,5 (3,7) (2,3) mm/s
Search AZ(Búsqueda de AZ)
6099h 02h int32 rw
Velocidad del recorrido al punto cero del eje AZMargen de valores: Ver Objeto 6099/01h

B. Información suplementaria
B-34 Festo P.BE-MTR-DCI-IO-ES es 1209d
Position_Control_Parameter_Set (Parametros del controlador de posición)
Acceso CI 60FBh 12h...15h,17h, 20h
Array uint16 rw
Descripción Parámetros de regulación así como parámetros para “registro de posicióncasi-absoluto”.Escritura sólo en casos de servicio.
Gain Position(Ganancia en la
posición)
60FBh 12h uint16 rw
Ganancia del regulador de posiciónMargen de valores: 1...200Predeterminado:MTR-DCI-32: 60 MTR-DCI-42/52/62: 35
Gain Velocity(Ganancia en
velocidad)
60FBh 13h uint16 rw
Ganancia del regulador de velocidadMargen de valores: 100...500Predeterminado:MTR-DCI-32: 500 MTR-DCI-42/52: 230 MTR-DCI-62: 200
I-Fraction Velocity(Fracción I de la
velocidad)
60FBh 14h uint16 rw
Fracción I del regulador de velocidadMargen de valores: 100...500Predeterminado:MTR-DCI-32: 500MTR-DCI-42/52: 320 MTR-DCI-62: 150
Gain Current(Ganancia de
corriente)
60FBh 15h uint16 rw
Regulador de ganancia de corrienteMargen de valores:MTR-DCI-32: 200...1000 MTR-DCI-42/52: 200...800Predeterminado:MTR-DCI-32: 1000 MTR-DCI-42/52: 400 MTR-DCI-62: 300
Gain VelocityTrajectory
(Ganancia de latrayectoria de
velocidad)
60FBh 17h uint16 rw
Regulador de la ganancia de valocidad – generador de trayectoriaValores: 1, 2Predeterminado:MTR-DCI-32: 1 MTR-DCI-42/52/62: 2

B. Información suplementaria
B-35Festo P.BE-MTR-DCI-IO-ES es 1209d
Position_Control_Parameter_Set (Parametros del controlador de posición)
Save Position(Guardar posición)
60FBh 20h uint16 r
240 (0x00F0) = la posición actual no se guarda al desconectar.El recorrido de referencia debe realizarse cada vez que se conecta el disposi-tivo.Este valor está predeterminado y ya no puede sobrescribirse.Hasta la versión de firmware V1.35 se aplica lo siguiente: Si este parámetro nocontiene el valor 240 (0x00F0), sobrescríbalo con el valor 240 (0x00F0)..
Local_Digital_Inputs (Entradas digitales locales)
Acceso CI 60FDh 00h uint32 r
Descripción Imagen de las salidas digitalesConMTR-DCI-...IO:Bit 0...15: Reservado (= 0)Bit 16...19: Número de registro actual (comparar byte de control 3)Bit 20: STARTBit 21: ENABLEBit 22...31: Reservado (= 0)
Local_Digital_Outputs (Salidas digitales locales)
Acceso CI 60FEh 01h...02h uint32 r
Descripción Imagen de las salidas digitales
Digital Outputs(Salidas digitales)
60FEh 01h uint32 r
Con MTR-DCI-...IO:Bit 0...15: Reservado (= 0)Bit 16 : READYBit 17: MCBit 18...31: Reservado (= 0)
Mask(máscara)
60FEh 02h uint32 r
Con el MTR-DCI-...IO siempre 0 (no se permite la escritura).
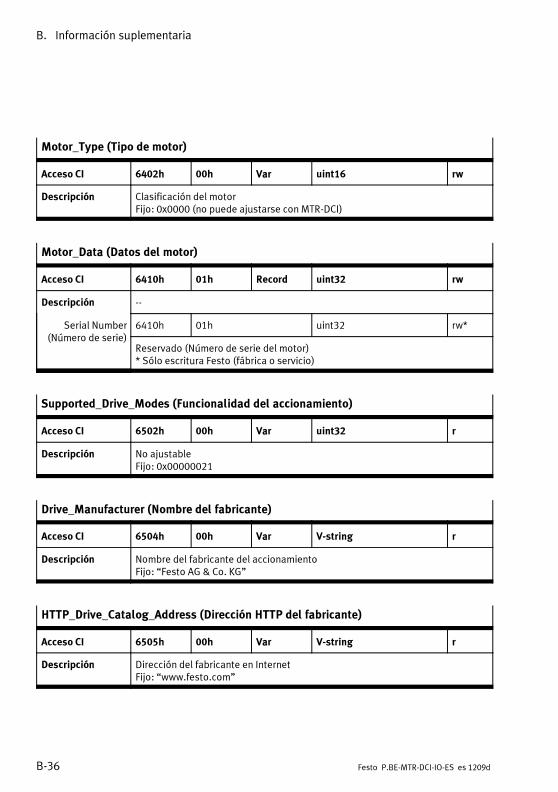
B. Información suplementaria
B-36 Festo P.BE-MTR-DCI-IO-ES es 1209d
Motor_Type (Tipo de motor)
Acceso CI 6402h 00h Var uint16 rw
Descripción Clasificación del motorFijo: 0x0000 (no puede ajustarse conMTR-DCI)
Motor_Data (Datos del motor)
Acceso CI 6410h 01h Record uint32 rw
Descripción --
Serial Number(Número de serie)
6410h 01h uint32 rw*
Reservado (Número de serie del motor)* Sólo escritura Festo (fábrica o servicio)
Supported_Drive_Modes (Funcionalidad del accionamiento)
Acceso CI 6502h 00h Var uint32 r
Descripción No ajustableFijo: 0x00000021
Drive_Manufacturer (Nombre del fabricante)
Acceso CI 6504h 00h Var V-string r
Descripción Nombre del fabricante del accionamientoFijo: “Festo AG & Co. KG”
HTTP_Drive_Catalog_Address (Dirección HTTP del fabricante)
Acceso CI 6505h 00h Var V-string r
Descripción Dirección del fabricante en InternetFijo: “www.festo.com”
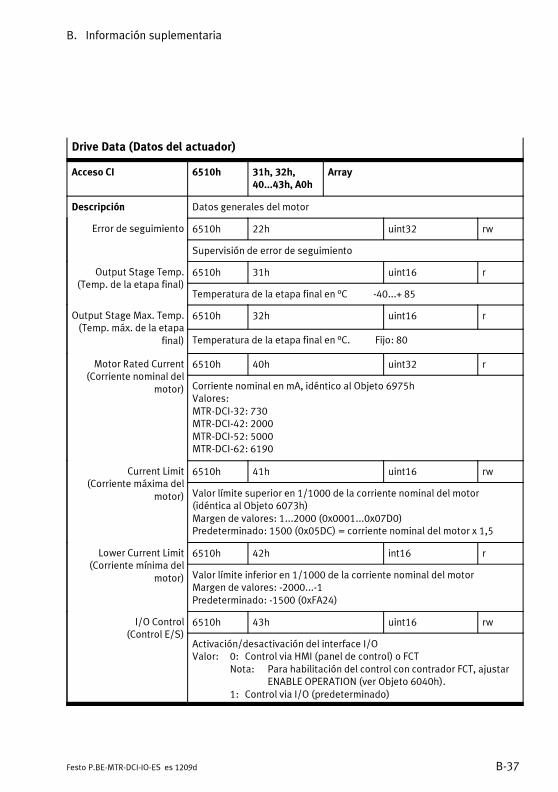
B. Información suplementaria
B-37Festo P.BE-MTR-DCI-IO-ES es 1209d
Drive Data (Datos del actuador)
Acceso CI 6510h 31h, 32h,40...43h, A0h
Array
Descripción Datos generales del motor
Error de seguimiento 6510h 22h uint32 rw
Supervisión de error de seguimiento
Output Stage Temp.(Temp. de la etapa final)
6510h 31h uint16 r
Temperatura de la etapa final en °C -40...+ 85
Output Stage Max. Temp.(Temp. máx. de la etapa
final)
6510h 32h uint16 r
Temperatura de la etapa final en °C. Fijo: 80
Motor Rated Current(Corriente nominal del
motor)
6510h 40h uint32 r
Corriente nominal en mA, idéntico al Objeto 6975hValores:MTR-DCI-32: 730MTR-DCI-42: 2000MTR-DCI-52: 5000MTR-DCI-62: 6190
Current Limit(Corriente máxima del
motor)
6510h 41h uint16 rw
Valor límite superior en 1/1000 de la corriente nominal del motor(idéntica al Objeto 6073h)Margen de valores: 1...2000 (0x0001...0x07D0)Predeterminado: 1500 (0x05DC) = corriente nominal del motor x 1,5
Lower Current Limit(Corriente mínima del
motor)
6510h 42h int16 r
Valor límite inferior en 1/1000 de la corriente nominal del motorMargen de valores: -2000...-1Predeterminado: -1500 (0xFA24)
I/O Control(Control E/S)
6510h 43h uint16 rw
Activación/desactivación del interface I/OValor: 0: Control via HMI (panel de control) o FCT
Nota: Para habilitación del control con contrador FCT, ajustarENABLE OPERATION (ver Objeto 6040h).
1: Control via I/O (predeterminado)
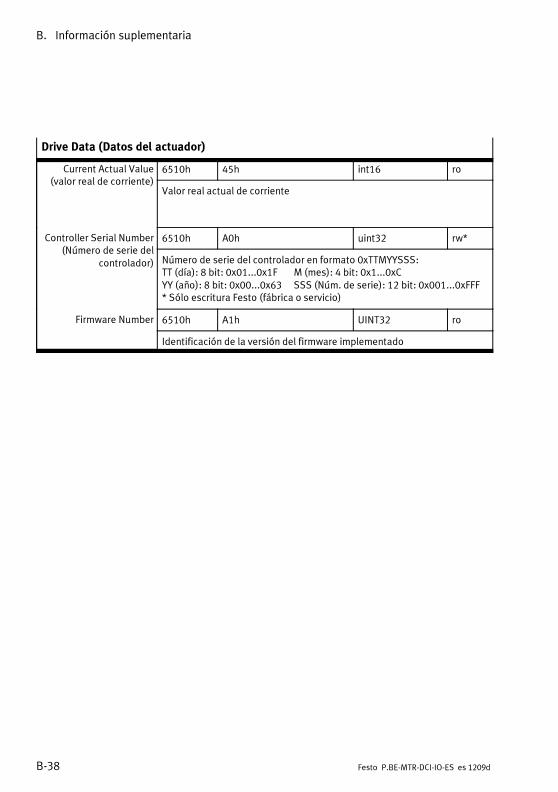
B. Información suplementaria
B-38 Festo P.BE-MTR-DCI-IO-ES es 1209d
Drive Data (Datos del actuador)
Current Actual Value(valor real de corriente)
6510h 45h int16 ro
Valor real actual de corriente
Controller Serial Number(Número de serie del
controlador)
6510h A0h uint32 rw*
Número de serie del controlador en formato 0xTTMYYSSS:TT (día): 8 bit: 0x01...0x1F M (mes): 4 bit: 0x1...0xCYY (año): 8 bit: 0x00...0x63 SSS (Núm. de serie): 12 bit: 0x001...0xFFF* Sólo escritura Festo (fábrica o servicio)
Firmware Number 6510h A1h UINT32 ro
Identificación de la versión del firmware implementado

Indice
C-1Festo P.BE-MTR-DCI-IO-ES es 1209d
Apéndice C
Indice
C. Indice
C-2 Festo P.BE-MTR-DCI-IO-ES es 1209d
Contenido
C. Indice C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

C. Indice
C-3Festo P.BE-MTR-DCI-IO-ES es 1209d
Indice
A
Absoluto 5-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Accionamiento XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Acoplamiento 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Actuador 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ajustes predeterminados 5-7. . . . . . . . . . . . . . . . . . . . . . . . . .
Alimentación 3-4, 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C
Cable 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Carrera de trabajo 1-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Carrera nominal 1-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Componentes 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comportamiento en el arranque 6-3. . . . . . . . . . . . . . . . . . . . .
Conexión 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Conexión a tierra 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control del dispositivo 4-20, 5-6, 5-20. . . . . . . . . . . . . . . . . . .
Controlador XIII, 3-4, 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . .
D
Diagnosis 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Cuadro general 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Mensajes de fallo 6-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dimensiones 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DME XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dotación del suministro VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C-4 Festo P.BE-MTR-DCI-IO-ES es 1209d
E
Eje XIII, 1-3, 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EMC XIII, 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Encoder XIII, 1-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Especificaciones técnicas A-3. . . . . . . . . . . . . . . . . . . . . . . . . .
F
Fallo 6-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fallos de transmisión B-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FCT XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Inicio 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Instalación 5-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Festo Configuration Tool (FCT) XIII. . . . . . . . . . . . . . . . . . . . . .
Frase de posicionamiento 1-4. . . . . . . . . . . . . . . . . . . . . . . . . .
Fuente de alimentación 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . .
G
Grupo al que se destina VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Grupo motor XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Dimensiones 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
H
HMI (ver control del dispositivo) XIII. . . . . . . . . . . . . . . . . . . . .
Homing mode XIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Homing Mode (véase referenciado) 1-8. . . . . . . . . . . . . . . . . .
C. Indice
C-5Festo P.BE-MTR-DCI-IO-ES es 1209d
I
I/OCorriente máxima A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Diagnosis 4-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Nivel de la señal A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Prueba de funcionamiento 5-22. . . . . . . . . . . . . . . . . . . . . .
Incrementos 1-5, A-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Instrucciones de seguridad VII. . . . . . . . . . . . . . . . . . . . . . . . .
Instrucciones para el usuario IX. . . . . . . . . . . . . . . . . . . . . . . .
Interface serie 3-4, 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
L
LED 6-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M
Mantenimiento 6-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Marcas en el texto X. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Margen de trabajo 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Margen de valores, permitido B-7. . . . . . . . . . . . . . . . . . . . . . .
Método del recorrido de referenciaInterruptor de referencia 1-16. . . . . . . . . . . . . . . . . . . . . . . .Tope fijo 1-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modo de funcionamiento XIV, 1-7. . . . . . . . . . . . . . . . . . . . . . .Modo Teach XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Profile position mode XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . .Profile Position Mode (véase Modo de posicionamiento) 1-7
Modo demo 5-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modo Teach XIV, 4-12, 4-14, 5-13. . . . . . . . . . . . . . . . . . . . . . .
Montaje 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Motor 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C-6 Festo P.BE-MTR-DCI-IO-ES es 1209d
O
Object directory B-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Órdenes del menú (resumen) 4-7. . . . . . . . . . . . . . . . . . . . . . .
P
Panel de control 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Acceso al menú principal 4-6. . . . . . . . . . . . . . . . . . . . . . . . .Función de los botones (resumen) 4-5. . . . . . . . . . . . . . . . .Sistema de menú 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Órdenes del menú (resumen) 4-7. . . . . . . . . . . . . . . . . . . . .
Parametrización 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parámetros del eje 4-9, 4-12, 5-13. . . . . . . . . . . . . . . . . . . . . .
Parámetros del sistema 4-10. . . . . . . . . . . . . . . . . . . . . . . . . . .
Password (Clave de acceso) 4-15, 6-4. . . . . . . . . . . . . . . . . . .Ajuste 4-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Entrar 4-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Modificar/desactivar 4-16. . . . . . . . . . . . . . . . . . . . . . . . . . .
Pictogramas X. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PLC XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Posición final por software 1-11, 5-13, B-29. . . . . . . . . . . . . .Negativo XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Positivo XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Procedimiento de acceso B-3. . . . . . . . . . . . . . . . . . . . . . . . . .
Profile position mode XIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Profile Position Mode (véase Modo de posicionamiento) 1-7.
Programar posiciones de destino 5-16. . . . . . . . . . . . . . . . . . .
Protocolo de transmisión B-6. . . . . . . . . . . . . . . . . . . . . . . . . . .
Puesta a puntoCon el Festo Configuration Tool (FCT) 5-19. . . . . . . . . . . . . .Con panel de control 5-6. . . . . . . . . . . . . . . . . . . . . . . . . . . .Procedimiento 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Punto cero del eje XIV, 1-11, 5-13, B-30. . . . . . . . . . . . . . . . . .
Punto cero del proyecto XV, 1-11. . . . . . . . . . . . . . . . . . . . . . .
Puntos de base 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C-7Festo P.BE-MTR-DCI-IO-ES es 1209d
R
Reacción al arranque 5-4, 5-26. . . . . . . . . . . . . . . . . . . . . . . . .
Recorrido de referencia XV, 5-23. . . . . . . . . . . . . . . . . . . . . . . .Inicio 5-12, 5-26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Interrupción [Disable] 5-13, 5-26. . . . . . . . . . . . . . . . . . . . . .Limitación de intensidad 5-10. . . . . . . . . . . . . . . . . . . . . . . .Parámetros 4-13, 5-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Realización 4-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Referencia XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Interruptor de referencia XIV, 3-4, 3-12. . . . . . . . . . . . . . . .Punto de referencia XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ReferenciadoInterruptor de referencia 1-6. . . . . . . . . . . . . . . . . . . . . . . . .Método del recorrido de referencia XIV. . . . . . . . . . . . . . . . .Punto de referencia 1-11. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Registro de posición XV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Inicio 5-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Interrupción [Disable] 5-29. . . . . . . . . . . . . . . . . . . . . . . . . . .Realización 4-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Registro de posicionado 5-23. . . . . . . . . . . . . . . . . . . . . . . . . .
Relativo 5-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
S
Servicio VIII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Signo 1-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de base 1-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de menú 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de referencia de medida 1-12. . . . . . . . . . . . . . . . . . .
T
Tabla de registros de posiciónCrear 4-14, 5-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Mostrar 4-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Proceso 4-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C-8 Festo P.BE-MTR-DCI-IO-ES es 1209d
Tipo de eje 4-11, 5-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tipo de protección 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
U
Unidades de medida 1-5, A-13. . . . . . . . . . . . . . . . . . . . . . . . .
V
Versión XII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .