grupo motor mtr−dci - festo...el motor mtr−dci es un servomotor avanzado que incorpora un motor...
TRANSCRIPT
Manual
Tipo MTR−DCI−...Tipo MTR−DCI−...IO
Manual539 617es 0501a[677 796]
Grupo motorMTR−DCI

Tanto Adobe® como Reader® son marcas registradas deAdobe Systems Incorporated en los Estados Unidos y/o enotros países.
Contenido e instrucciones generales
IFesto P.BE−MTR−DCI−IO−ES es 0501a
Original de. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Edición es 0501a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Denominación P.BE−MTR−DCI−IO−ES. . . . . . . . . . . . . . . . . . . .
Nº de artículo 539 617. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
E (Festo AG�&�Co. KG, D�73726 Esslingen, RepúblicaFederal de Alemania, 2005)Internet: http://www.festo.comE−Mail: [email protected]
Sin nuestra expresa autorización, queda terminantementeprohibida la reproducción total o parciel de este documento,así como su uso indebido y/o exhibición o comunicación aterceros. De los infractores se exigirá el correspondienteresarcimiento de daños y perjuicios. Quedan reservadostodos los derechos inherentes, en especial los de patentes,de modelos registrados y estéticos.

Contenido e instrucciones generales
II Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido e instrucciones generales
IIIFesto P.BE−MTR−DCI−IO−ES es 0501a
Contenido
Uso al que se destina VI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Instrucciones de seguridad VIII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Grupo al que se destina IX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Servicio IX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Dotación del suministro IX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Instrucciones importantes para el usuario X . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Abreviaciones y términos específicos del producto XII . . . . . . . . . . . . . . . . . . . . . . . . . . . Manuales sobre el grupo motor tipo MTR−DCI... XV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Información sobre la versión XVI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. Resumen del sistema 1−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Posicionado con actuadores inteligentes 1−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Método de funcionamiento 1−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Coordenadas de referencia y área de trabajo 1−10 . . . . . . . . . . . . . . . . .
1.2 Concepto de PARO DE EMERGENCIA 1−14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Posibilidades en la puesta a punto 1−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Panel de control (MTR−DCI−...−H2) 1−16 . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Festo Configuration Tool (FCT) 1−16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Montaje 2−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Instrucciones generales 2−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Dimensiones del grupo motor 2−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Montaje de ejes eléctricos 2−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Instalación 3−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Resumen de la instalación 3−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Alimentación 3−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Interface serie 3−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Entrada para el interruptor de referencia externa 3−10 . . . . . . . . . . . . . . . . . . . . .
3.5 Conexión del control de nivel superior 3−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contenido e instrucciones generales
IV Festo P.BE−MTR−DCI−IO−ES es 0501a
4. Panel de control (MTR−DCI−...−H2−IO) 4−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Composición y función del panel de control 4−4 . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 El sistema de menú 4−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Acceso al menú principal 4−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Menú �Diagnostic" 4−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.3 Control del dispositivo �control HMI" 4−10 . . . . . . . . . . . . . . . . . . . . . . .
4.2.4 Menú �Settings" 4−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.5 Menú �Positioning" 4−17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5. Puesta a punto 5−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Preparación para la puesta a punto 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Verifique la conexión a la red de alimentación 5−3 . . . . . . . . . . . . . . . .
5.1.2 Verifique el accionamiento 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.3 Instalación y puesta en marcha del FCT 5−4 . . . . . . . . . . . . . . . . . . . . . .
5.2 Procedimiento para la puesta a punto 5−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Puesta a punto con FCT 5−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.2 Puesta a punto con el panel de control (MTR−DCI−...−H2) 5−10 . . . . . . . .
5.3 Parametrización y referencia (MTR−DCI−...−H2) 5−12 . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Establecimiento del tipo de eje 5−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Ajuste de los parámetros de puesta en origen 5−12 . . . . . . . . . . . . . . . .
5.3.3 Realización de la puesta en origen 5−17 . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.4 Programación (por Teach) del punto cero del eje y de las posiciones finalespor software 5−20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Posicionado con juegos de posición (position sets) (MTR−DCI−...−H2) 5−22 . . . . .
5.4.1 Programación (por Teach) de los juegos de posición 5−23 . . . . . . . . . . .
5.4.2 Ciclo de prueba 5−25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Prueba de funcionamiento de las I/O 5−26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Instrucciones durante el funcionamiento 5−27 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Diagnosis e indicación de errores 5−31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.1 Posibilidades generales de diagnosis 5−31 . . . . . . . . . . . . . . . . . . . . . . .
5.7.2 Indicadores de estado LED 5−32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.3 Mensajes de fallo en el display (MTR−DCI−...−H2) 5−34 . . . . . . . . . . . . . . .
Contenido e instrucciones generales
VFesto P.BE−MTR−DCI−IO−ES es 0501a
6. Comunicación con control de nivel superior 6−1 . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Conexión del interface I/O 6−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Descripción de las I/Os 6−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Descripción de la función (diagrama de pulsos−tiempo) 6−8 . . . . . . . . . . . . . . . .
6.4 Especificación de I/O 6−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7. Comunicación a través del interface serie 7−1 . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 El Command Interpreter (CI) 7−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Procedimiento para la transferencia de datos 7−4 . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Directorio de objetos 7−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.1 Objetos para la descripción del dispositivo 7−7 . . . . . . . . . . . . . . . . . . .
7.3.2 Objetos generales 7−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.3 Objetos para parametrización y puesta a punto 7−8 . . . . . . . . . . . . . . .
7.3.4 Objetos para crear juegos de posiciones 7−9 . . . . . . . . . . . . . . . . . . . . .
7.3.5 Objetos para el controlador 7−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.6 Objetos para el ajuste del modo de funcionamiento y control 7−10 . . . .
7.3.7 Objetos para diagnosis 7−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A. Apéndice técnico A−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas A−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Accesorios A−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Curvas características del motor A−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B. Información suplementario B−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Órdenes CI B−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Descripción del objeto B−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.1 Clasificación de objetos (cuadro general) B−7 . . . . . . . . . . . . . . . . . . . .
B.2.2 Grupo 1xxx B−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.3 Grupo 2xxx B−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.4 Grupo 6xxx B−20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Conversión de las unidades de medida B−40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice C−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Contenido e instrucciones generales
VI Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido e instrucciones generales
VIIFesto P.BE−MTR−DCI−IO−ES es 0501a
Uso al que se destina
El motor MTR−DCI es un servomotor avanzado que incorporaun motor DC, reductor, encoder y electrónica de control (con�trol de posicionamiento y regulador de posición).
El diseño mecánico y el interface enchufable del MTR−DCI hansido optimizados para ser utilizados con accionamiento linea�les eléctricos (p.ej. tipo DMES−...) de Festo. El motor tambiénpuede utilizarse para aplicaciones de posicionado específicasdel cliente con accionamientos por husillos lentos.
Este manual trata con las funciones básicas del MTR−DCI y elinterface de I/O del MTR−DCI−...IO. Los componentes adiciona�les, así como las variantes de bus de campo del MTR−DCI sedescriben en manuales aparte.
Es absolutamente necesario observar las instrucciones deseguridad indicadas las �Instrucciones de seguridad técnicas",así como el uso previsto de los componentes y módulos co�rrespondientes. Observe también las instrucciones de seguri�dad en las instrucciones de funcionamiento de los componen�tes eléctricos utilizado.
El MTR−DCI y los módulos y cables que pueden conectarse,sólo pueden utilizarse como sigue:
� de acuerdo con el uso a que se destina
� sólo en aplicaciones industriales
� sin modificaciones hechas por el usuario. Sólo se permi�ten las conversiones o modificaciones descritas en ladocumentación suministrada con el producto.
� en condiciones técnicas sin fallos.
Si se conectan componentes disponibles comercialmente,tales como sensores y actuadores, no hay que sobrepasar loslímites especificados para temperaturas, datos eléctricos,pares, etc.

Contenido e instrucciones generales
VIII Festo P.BE−MTR−DCI−IO−ES es 0501a
Por favor, observe los estándares especificados en los corres�pondientes capítulos y cumpla con las normas técnicas, asícomo con las regulaciones nacionales y locales.
Contenido e instrucciones generales
IXFesto P.BE−MTR−DCI−IO−ES es 0501a
Instrucciones de seguridad
Cuando se ponen a punto y se programan sistemas de posi�cionado, debe observar las normas de seguridad indicadasen este manual, así como las indicadas en las instruccionesde los demás componentes utilizados.
El usuario debe asegurarse de que no haya nadie en la zonade funcionamiento de los actuadores conectados o del sis�tema de ejes. El acceso a las zonas de posible riesgo debenimpedirse con medidas adecuadas, tales como pantalla pro�tectoras y signos de atención.
AtenciónLos ejes eléctricos pueden moverse inesperadamente confuerzas elevadas y altas velocidades. Las colisiones pue�den causar lesiones graves a las personas y daños mate�riales.
Asegúrese de que nadie pueda acceder al margen opera�tivo de los ejes o de los actuadores conectados y que nohaya objetos en el recorrido del eje mientras el sistema sehalle conectado a la alimentación de corriente.
AtenciónLos fallos en la parametrización pueden causar lesiones alas personas o daños a los equipos.
Ponga en marcha el control sólo si el sistema de ejes estácorrectamente instalado y parametrizado.
Contenido e instrucciones generales
X Festo P.BE−MTR−DCI−IO−ES es 0501a
Grupo al que se destina
Este manual está exclusivamente destinado a técnicos forma�dos en tecnología de automatización y control, con experien�cia en instalación, puesta a punto, programación y diagnosisde sistemas de posicionado.
Servicio
Consulte con el servicio local de reparación de Festo o escribaa la siguiente dirección de correo electrónico si tienen dificul�tades técnicas:
Dotación del suministro
Los siguientes elementos se suministran con el grupo motortipo MTR−DCI:
� grupo motor con controlador integrado, opcionalmentecon panel de control
� paquete de configuración FCT (Festo Configuration Tool)
� documentación de usuario en CD ROM.
Disponible como accesorio (ver apéndice A.2)
� cable de conexión
� documentación de usuario impresa en papel.
Contenido e instrucciones generales
XIFesto P.BE−MTR−DCI−IO−ES es 0501a
Instrucciones importantes para el usuario
Categorías del riesgo
Este manual contiene notas sobre los riesgos que puedenproducirse si el producto no se utiliza correctamente. Estasinstrucciones están marcadas (Atención, Precaución, etc.),impresas sobre fondo oscuro y marcadas adicionalmente conun pictograma. Debe distinguirse entre las siguientes catego�rías de riesgos:
AtenciónEsto significa que el no observar estas instrucciones puederesultar en lesiones importantes a las personas y daños almaterial.
PrecauciónEsto significa que el no observar estas instrucciones puederesultar en lesiones a las personas y daños al material.
Por favor, observarEsto significa que el no observar estas instrucciones puederesultar en daños al material.
El siguiente pictograma indica lugares del texto en los que sedescriben actividades con componentes sensibles a las des�cargas electrostáticas.
Componentes sensibles a las corrientes electrostáticas. Estospueden dañarse si no se manejan correctamente.
Contenido e instrucciones generales
XII Festo P.BE−MTR−DCI−IO−ES es 0501a
Marcado de información especial
Los siguientes pictogramas marcan pasajes en el texto quecontienen información especial.
Pictogramas
Información:Recomendaciones, sugerencias y referencias a otras fuentesde información
Accesorios:Información sobre los accesorios útiles o necesarios para losproductos Festo.
Entorno:Información sobre el uso de los productos Festo respetuosocon el entorno.
Marcas en el texto
· Las marcas con punto indican actividades que puedenhacerse en el orden que se quiera.
1. Los números indican actividades que deben hacerse en lasecuencia indicada.
� Los guiones indican actividades generales.
Contenido e instrucciones generales
XIIIFesto P.BE−MTR−DCI−IO−ES es 0501a
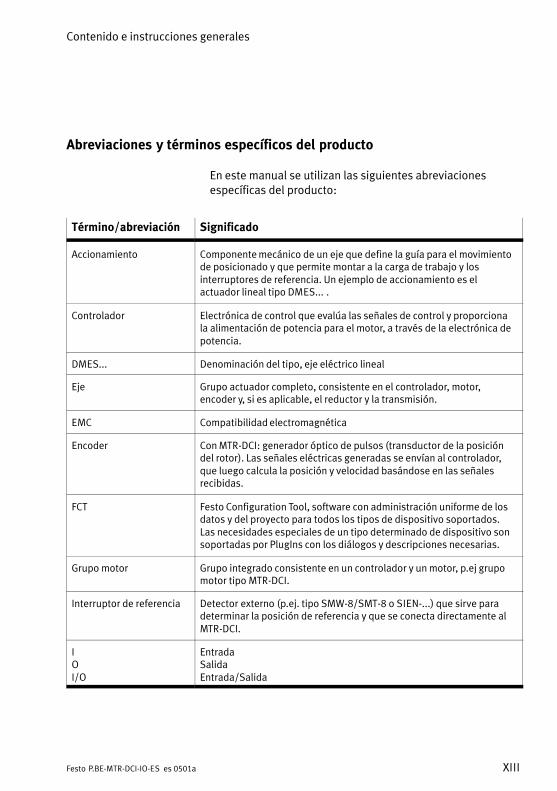
Abreviaciones y términos específicos del producto
En este manual se utilizan las siguientes abreviacionesespecíficas del producto:
Término/abreviación Significado
Accionamiento Componente mecánico de un eje que define la guía para el movimientode posicionado y que permite montar a la carga de trabajo y losinterruptores de referencia. Un ejemplo de accionamiento es elactuador lineal tipo DMES...�.
Controlador Electrónica de control que evalúa las señales de control y proporcionala alimentación de potencia para el motor, a través de la electrónica depotencia.
DMES... Denominación del tipo, eje eléctrico lineal
Eje Grupo actuador completo, consistente en el controlador, motor,encoder y, si es aplicable, el reductor y la transmisión.
EMC Compatibilidad electromagnética
Encoder Con MTR−DCI: generador óptico de pulsos (transductor de la posicióndel rotor). Las señales eléctricas generadas se envían al controlador,que luego calcula la posición y velocidad basándose en las señalesrecibidas.
FCT Festo Configuration Tool, software con administración uniforme de losdatos y del proyecto para todos los tipos de dispositivo soportados.Las necesidades especiales de un tipo determinado de dispositivo sonsoportadas por PlugIns con los diálogos y descripciones necesarias.
Grupo motor Grupo integrado consistente en un controlador y un motor, p.ej grupomotor tipo MTR−DCI.
Interruptor de referencia Detector externo (p.ej. tipo SMW−8/SMT−8 o SIEN−...) que sirve paradeterminar la posición de referencia y que se conecta directamente alMTR−DCI.
IOI/O
EntradaSalidaEntrada/Salida
Contenido e instrucciones generales
XIV Festo P.BE−MTR−DCI−IO−ES es 0501a
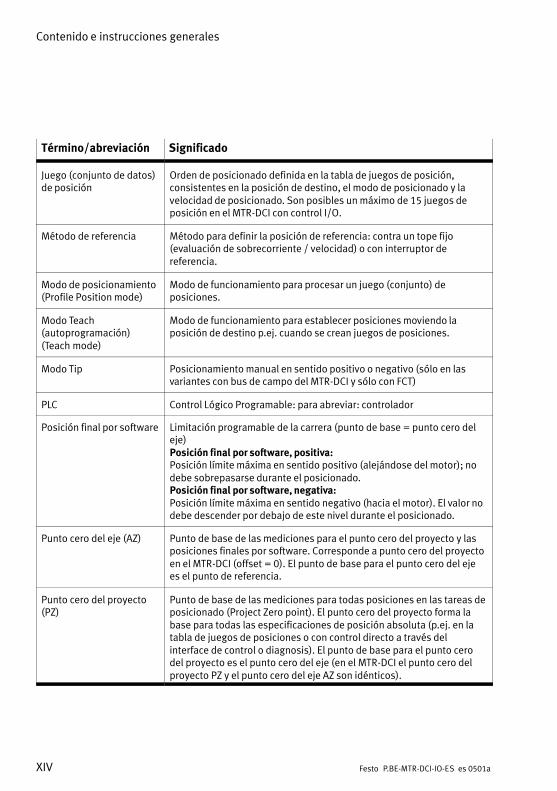
Término/abreviación Significado
Juego (conjunto de datos)de posición
Orden de posicionado definida en la tabla de juegos de posición,consistentes en la posición de destino, el modo de posicionado y lavelocidad de posicionado. Son posibles un máximo de 15 juegos deposición en el MTR−DCI con control I/O.
Método de referencia Método para definir la posición de referencia: contra un tope fijo(evaluación de sobrecorriente / velocidad) o con interruptor dereferencia.
Modo de posicionamiento(Profile Position mode)
Modo de funcionamiento para procesar un juego (conjunto) deposiciones.
Modo Teach(autoprogramación)(Teach mode)
Modo de funcionamiento para establecer posiciones moviendo laposición de destino p.ej. cuando se crean juegos de posiciones.
Modo Tip Posicionamiento manual en sentido positivo o negativo (sólo en lasvariantes con bus de campo del MTR−DCI y sólo con FCT)
PLC Control Lógico Programable: para abreviar: controlador
Posición final por software Limitación programable de la carrera (punto de base = punto cero deleje)Posición final por software, positiva:Posición límite máxima en sentido positivo (alejándose del motor); nodebe sobrepasarse durante el posicionado.Posición final por software, negativa:Posición límite máxima en sentido negativo (hacia el motor). El valor nodebe descender por debajo de este nivel durante el posicionado.
Punto cero del eje (AZ) Punto de base de las mediciones para el punto cero del proyecto y lasposiciones finales por software. Corresponde a punto cero del proyectoen el MTR−DCI (offset = 0). El punto de base para el punto cero del ejees el punto de referencia.
Punto cero del proyecto(PZ)
Punto de base de las mediciones para todas posiciones en las tareas deposicionado (Project Zero point). El punto cero del proyecto forma labase para todas las especificaciones de posición absoluta (p.ej. en latabla de juegos de posiciones o con control directo a través delinterface de control o diagnosis). El punto de base para el punto cerodel proyecto es el punto cero del eje (en el MTR−DCI el punto cero delproyecto PZ y el punto cero del eje AZ son idénticos).
Contenido e instrucciones generales
XVFesto P.BE−MTR−DCI−IO−ES es 0501a
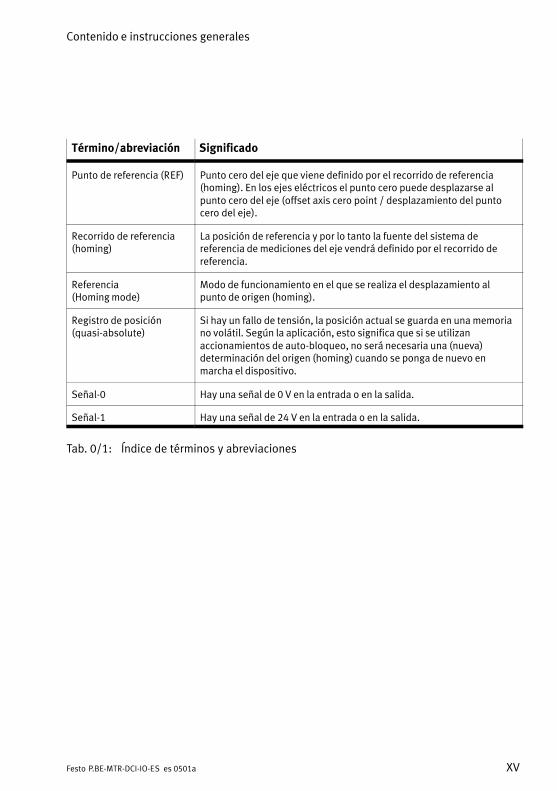
Término/abreviación Significado
Punto de referencia (REF) Punto cero del eje que viene definido por el recorrido de referencia(homing). En los ejes eléctricos el punto cero puede desplazarse alpunto cero del eje (offset axis cero point / desplazamiento del puntocero del eje).
Recorrido de referencia(homing)
La posición de referencia y por lo tanto la fuente del sistema dereferencia de mediciones del eje vendrá definido por el recorrido dereferencia.
Referencia(Homing mode)
Modo de funcionamiento en el que se realiza el desplazamiento alpunto de origen (homing).
Registro de posición(quasi−absolute)
Si hay un fallo de tensión, la posición actual se guarda en una memoriano volátil. Según la aplicación, esto significa que si se utilizanaccionamientos de auto−bloqueo, no será necesaria una (nueva)determinación del origen (homing) cuando se ponga de nuevo enmarcha el dispositivo.
Señal−0 Hay una señal de 0 V en la entrada o en la salida.
Señal−1 Hay una señal de 24 V en la entrada o en la salida.
Tab.�0/1: Índice de términos y abreviaciones
Contenido e instrucciones generales
XVI Festo P.BE−MTR−DCI−IO−ES es 0501a
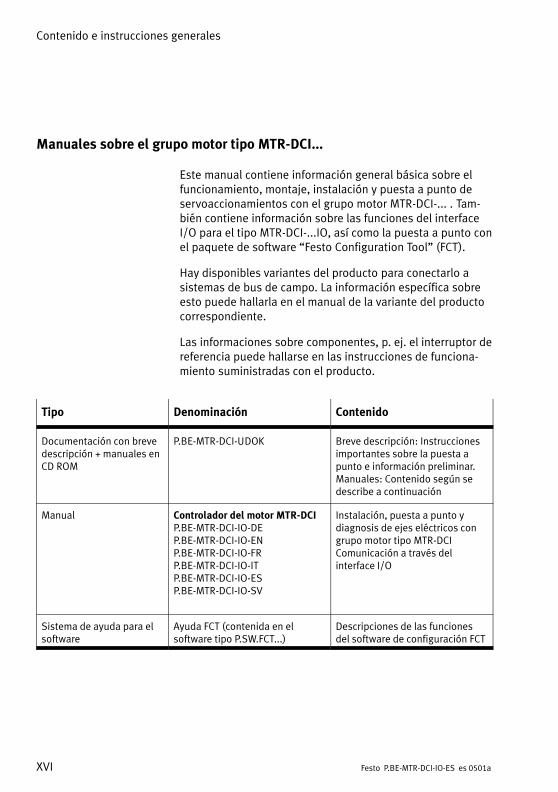
Manuales sobre el grupo motor tipo MTR−DCI...
Este manual contiene información general básica sobre elfuncionamiento, montaje, instalación y puesta a punto deservoaccionamientos con el grupo motor MTR−DCI−...�. Tam�bién contiene información sobre las funciones del interfaceI/O para el tipo MTR−DCI−...IO, así como la puesta a punto conel paquete de software �Festo Configuration Tool" (FCT).
Hay disponibles variantes del producto para conectarlo asistemas de bus de campo. La información específica sobreesto puede hallarla en el manual de la variante del productocorrespondiente.
Las informaciones sobre componentes, p. ej. el interruptor dereferencia puede hallarse en las instrucciones de funciona�miento suministradas con el producto.
Tipo Denominación Contenido
Documentación con brevedescripción + manuales enCD ROM
P.BE−MTR−DCI−UDOK Breve descripción: Instruccionesimportantes sobre la puesta apunto e información preliminar.Manuales: Contenido según sedescribe a continuación
Manual Controlador del motor MTR−DCIP.BE−MTR−DCI−IO−DEP.BE−MTR−DCI−IO−ENP.BE−MTR−DCI−IO−FRP.BE−MTR−DCI−IO−ITP.BE−MTR−DCI−IO−ESP.BE−MTR−DCI−IO−SV
Instalación, puesta a punto ydiagnosis de ejes eléctricos congrupo motor tipo MTR−DCIComunicación a través delinterface I/O
Sistema de ayuda para elsoftware
Ayuda FCT (contenida en elsoftware tipo P.SW.FCT...)
Descripciones de las funcionesdel software de configuración FCT

Contenido e instrucciones generales
XVIIFesto P.BE−MTR−DCI−IO−ES es 0501a
Tipo ContenidoDenominación
Otros manuales Variantes de bus de campoTipo P.BE−MTR−DCI−CO−...Tipo P.BE−MTR−DCI−PB−...Tipo P.BE−MTR−DCI−DN−...
Comunicación y puesta a puntodel correspondiente bus decampo
Instrucciones de utilización Servoaccionamientos eléctricosTipo DMES−...
Montaje y puesta a punto deactuador lineal con husillo ycorredera como elemento deaccionamiento.
Información sobre la versión
La versión de hardware especifica el estado de la versión delas piezas mecánicas y la electrónica del MTR−DCI.
La versión de firmware especifica el estado de la versión delsistema operativo del MTR−DCI.
Puede hallar las especificaciones sobre el estado de laversión como sigue:
� Versión de hardware y firmware en el FCT con conexiónactiva al dispositivo MTR−DCI bajo �Device data" (datosdel dispositivo).
� Versión de firmware en el panel de control bajo[Diagnostic] [Software information]
Versión de firmware ¿Qué hay de nuevo? ¿Qué PlugIn del FCT?
V−DME1.19 Soporta actuadores lineales tipo DMES−25,DMES−40
MTR−DCI V01.00.00

Contenido e instrucciones generales
XVIII Festo P.BE−MTR−DCI−IO−ES es 0501a
Resumen del sistema
1−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Capítulo 1
1. Resumen del sistema
1−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
1. Resumen del sistema 1−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Posicionado con actuadores inteligentes 1−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Método de funcionamiento 1−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Coordenadas de referencia y área de trabajo 1−10 . . . . . . . . . . . . . . . . .
1.2 Concepto de PARO DE EMERGENCIA 1−14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Posibilidades en la puesta a punto 1−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Panel de control (MTR−DCI−...−H2) 1−16 . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Festo Configuration Tool (FCT) 1−16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. Resumen del sistema
1−3Festo P.BE−MTR−DCI−IO−ES es 0501a
1.1 Posicionado con actuadores inteligentes
La electrónica integrada del MTR−DCI permite al grupo motorcontrolar desplazamientos hasta máx. 15 posiciones(+�puesta en origen) con velocidades ajustables por sepa�rado. El margen de posicionado permisible puede limitarsepor medio de posiciones finales por software.
La parametrización con un PC es posible a través del inter�face RS232 con el paquete de software FCT. El panel de con�trol opcional con display y cuatro botones operativos permiteparametrizar posiciones y velocidades directamente en elactuador (véase también el capítulo 1.3).
El acoplamiento a un PLC/IPC de nivel superior se realiza através de entradas/salidas digitales (MTR−DCI−...IO) o con lascorrespondientes variantes del producto a través de un busde campo (en preparación: DeviceNet, CANopen,PROFIBUS−DP).
Festo ofrece accesorios adecuados para sistemas de posicio�namiento. Estos accesorios se ajustan a los grupos de accio�namiento y actuadores lineales (véase el programa de sumi�nistro Festo o el catálogo).
1. Resumen del sistema
1−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
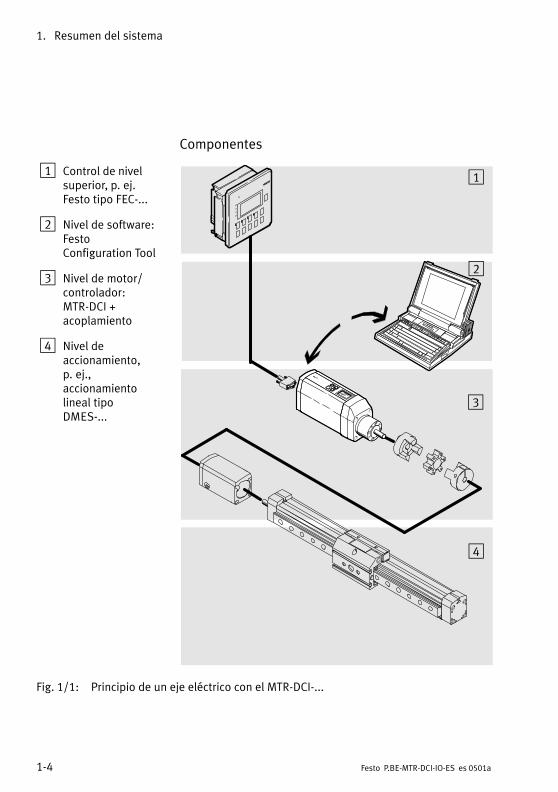
Componentes
1 Control de nivelsuperior, p.�ej.Festo tipo FEC−...
2 Nivel de software:FestoConfiguration Tool
3 Nivel de motor/controlador:MTR−DCI +acoplamiento
4 Nivel deaccionamiento,p.�ej.,accionamientolineal tipoDMES−...
1
2
3
4
Fig.�1/1: Principio de un eje eléctrico con el MTR−DCI−...
1. Resumen del sistema
1−5Festo P.BE−MTR−DCI−IO−ES es 0501a
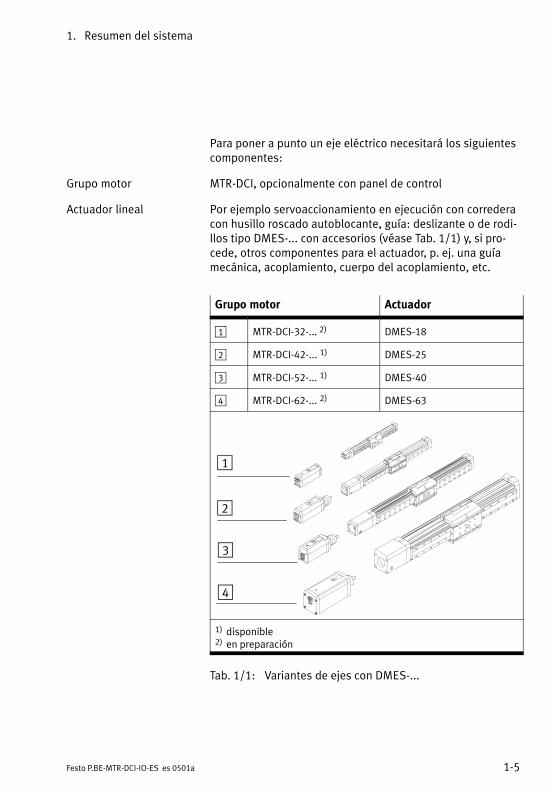
Para poner a punto un eje eléctrico necesitará los siguientescomponentes:
Grupo motor MTR−DCI, opcionalmente con panel de control
Actuador lineal Por ejemplo servoaccionamiento en ejecución con correderacon husillo roscado autoblocante, guía: deslizante o de rodi�llos tipo DMES−... con accesorios (véase Tab.�1/1) y, si pro�cede, otros componentes para el actuador, p. ej. una guíamecánica, acoplamiento, cuerpo del acoplamiento, etc.
Grupo motor Actuador
1 MTR−DCI−32−... 2) DMES−18
2 MTR−DCI−42−... 1) DMES−25
3 MTR−DCI−52−... 1) DMES−40
4 MTR−DCI−62−... 2) DMES−63
1
2
3
4
1) disponible2) en preparación
Tab.�1/1: Variantes de ejes con DMES−...
1. Resumen del sistema
1−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
Fuente de alimentación Para alimentación de la tensión de funcionamiento y de lacarga.
� MTR−DCI...−32/42/52: 24 V DC
� MTR−DCI...−62: 48 V DC
Cable Para la transmisión de la información entre el control de nivelsuperior, el PC y el MTR−DCI−... (véase �Accesorios").
Interruptor de referencia Opcionalmente: sensor adecuado (normalmente abierto)como interruptor de referencia p. ej. tipo SME−8/SMT oSIEN−...�.
Reductor por engranajes
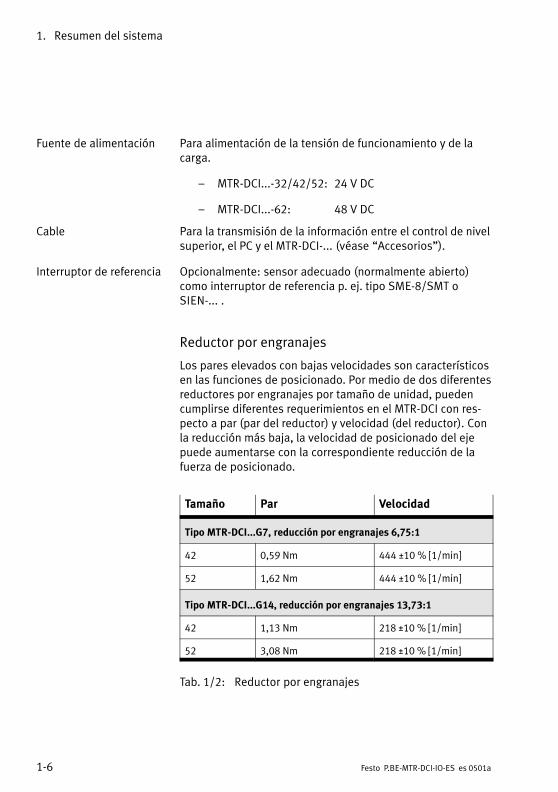
Los pares elevados con bajas velocidades son característicosen las funciones de posicionado. Por medio de dos diferentesreductores por engranajes por tamaño de unidad, puedencumplirse diferentes requerimientos en el MTR−DCI con res�pecto a par (par del reductor) y velocidad (del reductor). Conla reducción más baja, la velocidad de posicionado del ejepuede aumentarse con la correspondiente reducción de lafuerza de posicionado.
Tamaño Par Velocidad
Tipo MTR−DCI...G7, reducción por engranajes 6,75:1
42 0,59 Nm 444 ±10 % [1/min]
52 1,62 Nm 444 ±10 % [1/min]
Tipo MTR−DCI...G14, reducción por engranajes 13,73:1
42 1,13 Nm 218 ±10 % [1/min]
52 3,08 Nm 218 ±10 % [1/min]
Tab.�1/2: Reductor por engranajes
1. Resumen del sistema
1−7Festo P.BE−MTR−DCI−IO−ES es 0501a
Modos de funcionamiento
Profile position mode Funcionamiento normal de posicionado
Homing mode Recorrido de posicionamiento para referenciar el sistemamecánico de referencia.
Para la puesta a punto, para verificación o para demostra�ción, también hay disponibles las siguientes funciones através del panel de control del MTR−DCI−...H2:
� Recorrido de posicionado para detectar la posición dedestino de un juego de posición (Teach mode)
� Recorrido de posicionado para verificar todos los juegosde posición en la tabla (Demo posit. tab.)
� Recorrido de posicionado para verificar cierto juego deposición en la tabla (Move posit. set.)
Seguridad operativa
Un amplio sistema de sensores y funciones de supervisiónaseguran un correcto funcionamiento:
� Supervisión de temperatura (medición de la temperaturadel motor y la temperatura de la etapa final de potencia)
� Supervisión de la tensión
� Reconocimiento de fallos en la alimentación detensión interna
� Reconocimiento de sobretensiones en el circuitointermedio (sólo con el tipo MTR−DCI−62...)
� Supervisión del fallo de seguimiento
� Reconocimiento de la posición final por software

1. Resumen del sistema
1−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
1.1.1 Método de funcionamiento
En el modo de posicionado, se especifica una cierta posicióna la cual el motor debe conducir. La posición actual se ob�tiene a partir de la información del sensor incremental in�terno (encoder óptico). La posición es consecuencia de lareducción por engranajes y del paso del husillo.
Dado que la posición actual se guarda en una memoria novolátil, en el caso de un fallo de tensión, puede implemen�tarse un registro de posición �quasi absolute" si se utiliza unaccionamiento autoblocante (irreversible).
La desviación de la posición es procesada en el control deposición y pasada al regulador de velocidad.
1 Control del motor
2 Controlador
3 Generador delvalor nominal
4 Controlador deposición
5 Regulador develocidad
6 Regulador decorriente
7 Etapa final
8 Convertidor deseñal
MP PI
3
8
4
5 6 7
1
2
P
Fig.�1/2: Representación técnica simplificada de la función de regulador en cascada
El grupo motor realiza las siguientes tareas:
� especificación de las posiciones nominales por el controlde posicionado
� comparación de las posiciones nominales y actuales ycontrol de posición
� control de la secuencia a través de entradas y salidasdigitales
1. Resumen del sistema
1−9Festo P.BE−MTR−DCI−IO−ES es 0501a
El MTR−DCI posee tres márgenes de memoria en los cualesgestiona parámetros:
� Los ajustes predeterminados y el firmware son guardadosen la memoria (FLASH Memory) Los datos de la FLASHson cargados cuando el dispositivo es conmutado porprimera vez o cuando se ha borrado la EEPROM.
� Los parámetros que son corrientemente utilizados y quepueden ser modificados con el panel de control o el soft�ware FCT se guardan en la memoria interna volátil (RAM).Cuando las modificaciones han sido guardadas, sontransferidas a la EEPROM.
� Los parámetros que son guardados una vez que el dispo�sitivo ha sido conectado, se guardan en la memoria novolátil EEPROM Los parámetros en la EEPROM son reteni�dos incluso tras la desconexión de la alimentación.
Por favor, observarPuede restablecer los ajustes predeterminados, si esnecesario, borrando directamente la EEPROM a través delinterface serie con el CI 20F1 (Data memory control)(véase el capítulo 7). Con ello se perderán los ajustesespecíficos del usuario.
· Utilice órdenes del CI sólo si ya tiene experiencia en elService Data Objects.
· Si es necesario, consulte con el servicio de Festo.
La tecnología FLASH también permite cargar una actualiza�ción del firmware (p. ej. para un firmware específico decliente) incluso posteriormente a través del interface RS232.Si es necesario, consulte con el servicio de Festo.
1. Resumen del sistema
1−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
1.1.2 Coordenadas de referencia y área de trabajo
El sistema de referencia de la medida del MTR−DCI está ba�sado en el punto cero del eje, que viene definido a través deloffset al punto de referencia. La posición del punto de refe�rencia es definida por el método de referenciado. El sistemade referencia de la medición es definido con la puesta enorigen (homing). Tras finalizar la puesta en origen, el actua�dor permanece en el punto cero del eje. La zona de trabajodel MTR−DCI viene definida por las posiciones finales porsoftware, que se refieren al punto cero del eje.
Reference point REF Punto de referencia. Forma la referencia mecánica del sis�tema de coordenadas del eje y se define por la puesta enorigen con un interruptor de referencia o un tope fijo, segúnel método de referenciado. Es el punto base del punto cerodel eje.
Axis zero point AZ Punto cero del eje. Es desplazado por una distancia definidadesde el punto de referencia (offset del punto cero del eje) yes el punto de base de las posiciones finales por software yel punto cero del proyecto. Definiendo el punto cero del eje ylas posiciones finales por software puede limitarse el área detrabajo del eje lineal al margen permitido (carrera de tra�bajo).
Project zero point PZ Punto cero del proyecto. Es un punto básico dentro de la ca�rrera de trabajo que el usuario puede seleccionar y al que sereferirán tanto las posiciones actuales como las de destinoen la tabla de juegos de posiciones. El punto cero del eje esel punto de base para el punto cero del proyecto.
El punto cero del proyecto es especificado por el MTR−DCI yes idéntico al punto cero del eje (offset del punto cero delproyecto = 0).
1. Resumen del sistema
1−11Festo P.BE−MTR−DCI−IO−ES es 0501a
Coordenadas de referencia y área de trabajo
Eje lineal 1)
Eje giratorio 2)
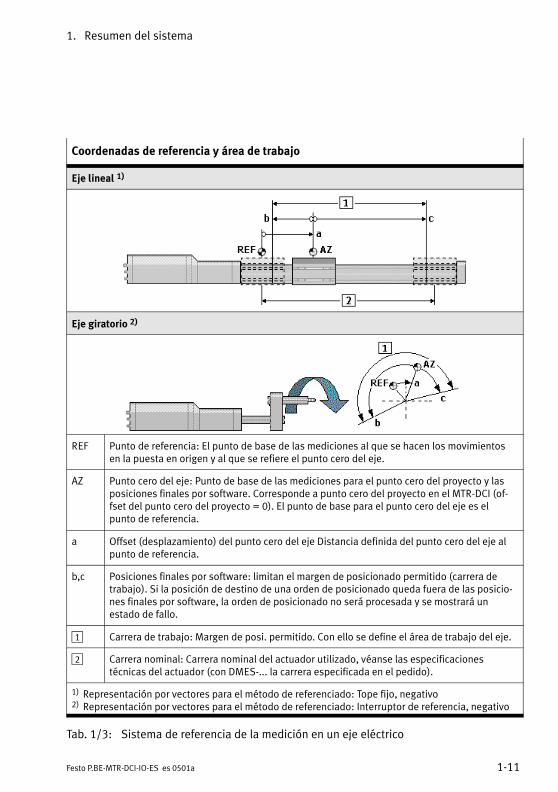
REF Punto de referencia: El punto de base de las mediciones al que se hacen los movimientosen la puesta en origen y al que se refiere el punto cero del eje.
AZ Punto cero del eje: Punto de base de las mediciones para el punto cero del proyecto y lasposiciones finales por software. Corresponde a punto cero del proyecto en el MTR−DCI (of�fset del punto cero del proyecto = 0). El punto de base para el punto cero del eje es elpunto de referencia.
a Offset (desplazamiento) del punto cero del eje Distancia definida del punto cero del eje alpunto de referencia.
b,c Posiciones finales por software: limitan el margen de posicionado permitido (carrera detrabajo). Si la posición de destino de una orden de posicionado queda fuera de las posicio�nes finales por software, la orden de posicionado no será procesada y se mostrará unestado de fallo.
1 Carrera de trabajo: Margen de posi. permitido. Con ello se define el área de trabajo del eje.
2 Carrera nominal: Carrera nominal del actuador utilizado, véanse las especificacionestécnicas del actuador (con DMES−... la carrera especificada en el pedido).
1) Representación por vectores para el método de referenciado: Tope fijo, negativo2) Representación por vectores para el método de referenciado: Interruptor de referencia, negativo
Tab.�1/3: Sistema de referencia de la medición en un eje eléctrico
1. Resumen del sistema
1−12 Festo P.BE−MTR−DCI−IO−ES es 0501a
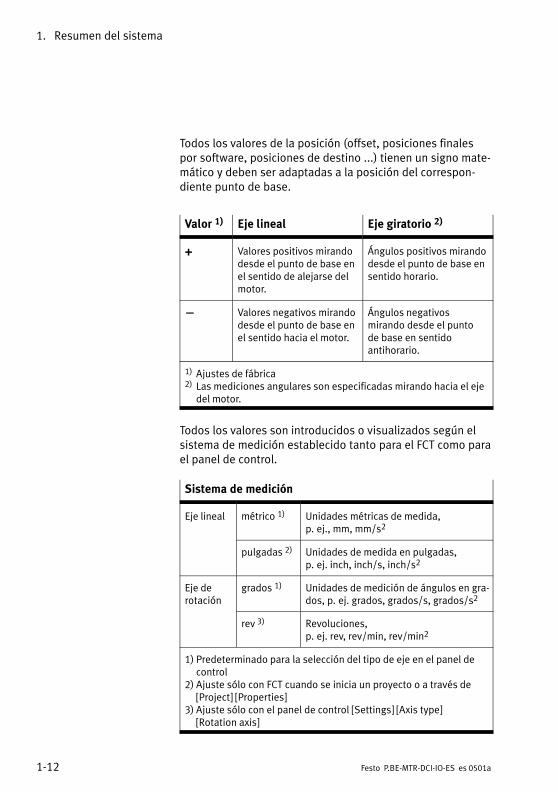
Todos los valores de la posición (offset, posiciones finalespor software, posiciones de destino ...) tienen un signo mate�mático y deben ser adaptadas a la posición del correspon�diente punto de base.
Valor 1) Eje lineal Eje giratorio 2)
+ Valores positivos mirandodesde el punto de base enel sentido de alejarse delmotor.
Ángulos positivos mirandodesde el punto de base ensentido horario.
� Valores negativos mirandodesde el punto de base enel sentido hacia el motor.
Ángulos negativosmirando desde el puntode base en sentidoantihorario.
1) Ajustes de fábrica2) Las mediciones angulares son especificadas mirando hacia el eje
del motor.
Todos los valores son introducidos o visualizados según elsistema de medición establecido tanto para el FCT como parael panel de control.
Sistema de medición
Eje lineal métrico 1) Unidades métricas de medida, p.�ej., mm, mm/s2
pulgadas 2) Unidades de medida en pulgadas, p.�ej. inch, inch/s, inch/s2
Eje derotación
grados 1) Unidades de medición de ángulos en gra�dos, p.�ej. grados, grados/s, grados/s2
rev 3) Revoluciones, p.�ej. rev, rev/min, rev/min2
1) Predeterminado para la selección del tipo de eje en el panel de control
2) Ajuste sólo con FCT cuando se inicia un proyecto o a través de[Project] [Properties]
3) Ajuste sólo con el panel de control [Settings] [Axis type][Rotation axis]

1. Resumen del sistema
1−13Festo P.BE−MTR−DCI−IO−ES es 0501a
El ajuste del sistema de medida en el panel de control influyeen la visualización. Todos los parámetros en el control son siempre guardados enincrementos (inch, inch/s, inch/s2 ...) y no son convertidoshasta que son escritos o leídos. Las mediciones transmitidas directamente a través de RS232,se refieren a una base de incremento (para la conversiónvéase el apéndice B.3).
1. Resumen del sistema
1−14 Festo P.BE−MTR−DCI−IO−ES es 0501a
1.2 Concepto de PARO DE EMERGENCIA
Por favor, observarVerifique, dentro de su marco de trabajo, su concepto dePARO DE EMERGENCIA para evaluar las medidas necesa�rias para poner su máquina / sistema en unestado seguroen el caso de un PARO DE EMERGENCIA (p. ej. al desco�nectar la tensión de funcionamiento).
AtenciónObserve que el MTR−DCI−...IO no tiene una tensión de ali�mentación separada para la lógica. En el caso de un PARODE EMERGENCIA, debería detener el actuador desacti�vando la señal de ENABLE (habilitación) en el interface deI/O (véase capítulo 6).
· Utilice finales de carrera adicionales aparte si necesitaun circuito de PARO DE EMERGENCIA para su aplicación.
� con estos interruptores puede desactivar la señalENABLE en el interface I/O
� o desconectar la tensión de funcionamiento.
· Al emplazar los finales de carrera y, si es necesario, contopes mecánicos adicionales, asegúrese de que el movi�miento del eje siempre queda dentro del margen deposicionado permitido.
1. Resumen del sistema
1−15Festo P.BE−MTR−DCI−IO−ES es 0501a
1.3 Posibilidades en la puesta a punto
Es posible parametrizar y poner a punto el MTR−DCI comosigue:
� directamente en el panel de control (HMI, sólo tipoMTR−DCI−...H2)
� a través del interface RS232 (con el software FCT).
El MTR−DCI también puede ser parametrizado y puesto apunto con el Command Interpreter a través del interfaceRS232. Las órdenes del CI relacionadas en el Object Directorypueden ser transmitidas al MTR−DCI con cualquier programaemulador de terminal. Sólo los usuarios con experiencia pue�den utilizar las órdenes del CI. Para más información, véaseel capitulo 7.
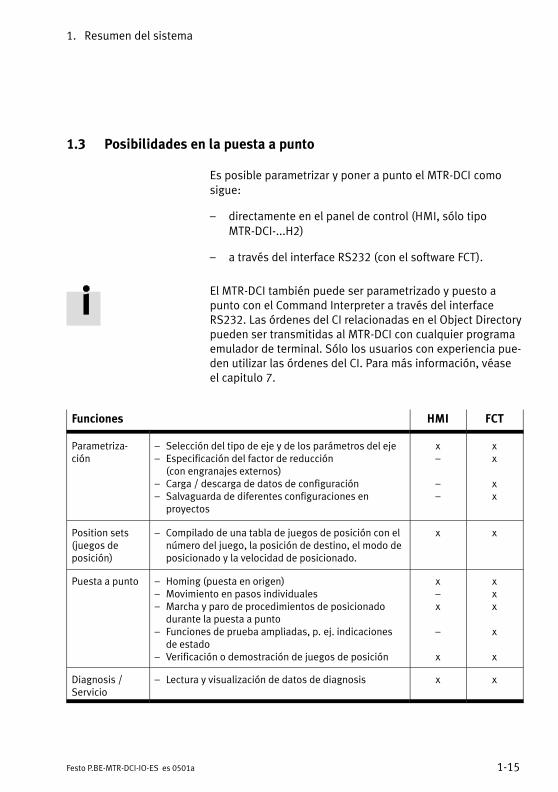
Funciones HMI FCT
Parametriza�ción
� Selección del tipo de eje y de los parámetros del eje� Especificación del factor de reducción
(con engranajes externos)� Carga / descarga de datos de configuración� Salvaguarda de diferentes configuraciones en
proyectos
x�
��
xx
xx
Position sets(juegos deposición)
� Compilado de una tabla de juegos de posición con elnúmero del juego, la posición de destino, el modo deposicionado y la velocidad de posicionado.
x x
Puesta a punto � Homing (puesta en origen)� Movimiento en pasos individuales� Marcha y paro de procedimientos de posicionado
durante la puesta a punto� Funciones de prueba ampliadas, p.�ej. indicaciones
de estado� Verificación o demostración de juegos de posición
x�x
�
x
xxx
x
x
Diagnosis /Servicio
� Lectura y visualización de datos de diagnosis x x
1. Resumen del sistema
1−16 Festo P.BE−MTR−DCI−IO−ES es 0501a
1.3.1 Panel de control (MTR−DCI−...−H2)
El panel de control ofrece todas las funciones necesariaspara la puesta a punto, programación, diagnosis y funciona�miento directamente en el MTR−DCI−... .
El panel de control proporciona las máscaras de entradanecesarias en forma de menús para editar los juegos de posi�ción y los parámetros. Si su sistema de posicionado estácompletamente configurado, puede desplazarlo fácilmente aposiciones y transferirlas a la tabla de juegos de posición.
La información sobre los elementos operativos y la estructurade menú puede hallarla en el capítulo 4, y una descripción dela puesta a punto con el panel de control a partir del capítulo5.2.2.
1.3.2 Festo Configuration Tool (FCT)
La Festo Configuration Tool (o para abreviar FCT) es la plata�forma de software para configurar y poner a punto los dife�rentes componentes o dispositivos de Festo.
El FCT consta de los siguientes componentes:
� Un marco de trabajo como programa de inicio y punto deentrada con administración uniforme del proyecto y losdatos para todos los tipos de dispositivos soportados.
� Un PlugIn para las demandas especiales de cada tipo dedispositivo (p. ej. MTR−DCI con las descripciones y diálo�gos necesarios. Los PlugIns son administrados e inicia�dos desde el marco de trabajo.
El PlugIn MTR−DCI para el FCT soporta todos los pasos nece�sarios para la puesta a punto de un MTR−DCI.
El software puede funcionar en todos los PC habituales conun sistema operativo Windows actual.
1. Resumen del sistema
1−17Festo P.BE−MTR−DCI−IO−ES es 0501a
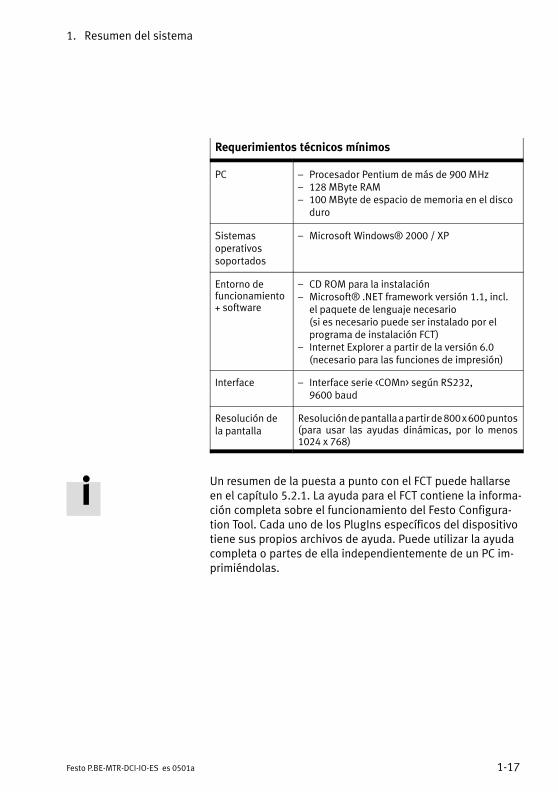
Requerimientos técnicos mínimos
PC � Procesador Pentium de más de 900 MHz� 128 MByte RAM� 100 MByte de espacio de memoria en el disco
duro
Sistemasoperativossoportados
� Microsoft Windows® 2000 / XP
Entorno defuncionamiento+ software
� CD ROM para la instalación� Microsoft® .NET framework versión 1.1, incl.
el paquete de lenguaje necesario (si es necesario puede ser instalado por elprograma de instalación FCT)
� Internet Explorer a partir de la versión 6.0(necesario para las funciones de impresión)
Interface � Interface serie <COMn> según RS232,9600�baud
Resolución dela pantalla
Resolución de pantalla a partir de 800 x 600 puntos(para usar las ayudas dinámicas, por lo menos1024 x 768)
Un resumen de la puesta a punto con el FCT puede hallarseen el capítulo 5.2.1. La ayuda para el FCT contiene la informa�ción completa sobre el funcionamiento del Festo Configura�tion Tool. Cada uno de los PlugIns específicos del dispositivotiene sus propios archivos de ayuda. Puede utilizar la ayudacompleta o partes de ella independientemente de un PC im�primiéndolas.
1. Resumen del sistema
1−18 Festo P.BE−MTR−DCI−IO−ES es 0501a
El sistema de ayuda del FCT
El FCT ofrece varias posibilidades de obtener información oayuda sobre el funcionamiento.
· Instale y ponga en marcha el programa tal como sedescribe en el capitulo 5.
Ayuda del FCT Puede abrir la ayuda del FCT como sigue:
· Acceda a la ayuda en el menú [Help] con la orden[Contents FCT general].
Con el botón de función F1 puede abrir directamente unmenú relacionado con el contexto.
Ayuda dinámica Para una visualización permanente de la información relacio�nada con el contexto, puede utilizar la ayuda dinámica inte�grada del FCT:
· Active la ayuda dinámica a través del menú [Help] con laorden [Dynamic help]. La ayuda dinámica aparecerá enuna ventana.
· Active el elemento en la ventana para la que requiere laayuda, p. ej. con un clic del ratón. Si están activadas zo�nas de la ventana o diálogos del PlugIn, el contenido delcorrespondiente PlugIn será visualizado automática�mente en la ayuda dinámica.
Ayuda para el PlugInMTR−DCI
La ayuda para el PlugIn MTR−DCI contiene toda la informa�ción sobre el funcionamiento del PlugIn.
Puede abrir la ayuda como sigue:
· Orden [Help] [Contents of installed PlugIns] [Festo (nom�bre del fabricante)] [MTR−DCI (nombre el PlugIn)].
· Botón de ayuda en el margen de la ventana o diálogo delplugIn.
· Botón F1 en el margen de la ventana activa o diálogo delPlugIn.
1. Resumen del sistema
1−19Festo P.BE−MTR−DCI−IO−ES es 0501a
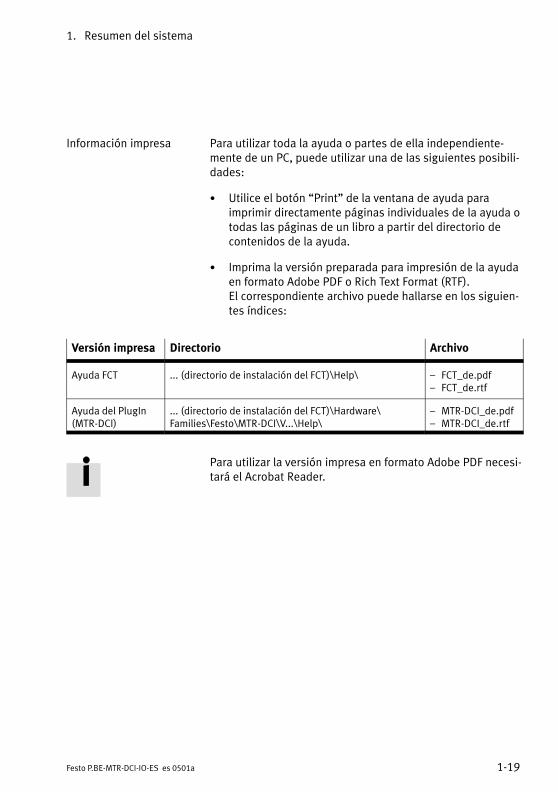
Información impresa Para utilizar toda la ayuda o partes de ella independiente�mente de un PC, puede utilizar una de las siguientes posibili�dades:
· Utilice el botón �Print" de la ventana de ayuda paraimprimir directamente páginas individuales de la ayuda otodas las páginas de un libro a partir del directorio decontenidos de la ayuda.
· Imprima la versión preparada para impresión de la ayudaen formato Adobe PDF o Rich Text Format (RTF). El correspondiente archivo puede hallarse en los siguien�tes índices:
Versión impresa Directorio Archivo
Ayuda FCT ... (directorio de instalación del FCT)\Help\ � FCT_de.pdf� FCT_de.rtf
Ayuda del PlugIn(MTR−DCI)
... (directorio de instalación del FCT)\Hardware\Families\Festo\MTR−DCI\V...\Help\
� MTR−DCI_de.pdf� MTR−DCI_de.rtf
Para utilizar la versión impresa en formato Adobe PDF necesi�tará el Acrobat Reader.

1. Resumen del sistema
1−20 Festo P.BE−MTR−DCI−IO−ES es 0501a
Montaje
2−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Capítulo 2
2. Montaje
2−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
2. Montaje 2−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Instrucciones generales 2−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Dimensiones del grupo motor 2−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Montaje de ejes eléctricos 2−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Montaje
2−3Festo P.BE−MTR−DCI−IO−ES es 0501a
2.1 Instrucciones generales
Atención· Asegúrese de que todo el sistema se halle desconectadode la alimentación de la tensión eléctrica antes de reali�zar trabajos en el sistema. Desconecte el sistema de laalimentación de tensión por medio del interruptor gene�ral.
Por favor, observarTrate los módulos y componentes con el mayor cuidado.Por favor, observe en especial lo siguiente:
� Las conexiones roscadas deben montarse sin desplazar�las y sin tensiones mecánicas. Los tornillos deben ajus�tar exactamente (de lo contrario se dañan las roscas).
� Deben respetarse los pares especificados.
� Los módulos no deben desplazarse.
� Las superficies de contacto deben estar limpias (evitarfalsos contactos).
2. Montaje
2−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
2.2 Dimensiones del grupo motor
H0
H2
H1
H3
B1B2
D1D2
D3
D4
L1
L2 L3
L4L5
10
5
13
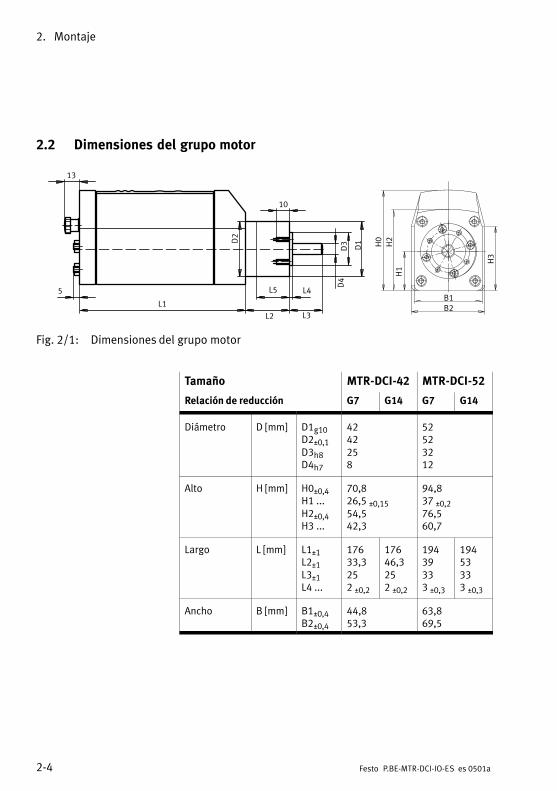
Fig.�2/1: Dimensiones del grupo motor
Tamaño MTR−DCI−42 MTR−DCI−52
Relación de reducción G7 G14 G7 G14
Diámetro D [mm] D1�g10D2±0,1D3�h8D4h7
4242258
52523212
Alto H [mm] H0±0,4H1 ...H2±0,4H3 ...
70,826,5 ±0,1554,542,3
94,837 ±0,276,560,7
Largo L [mm] L1±1L2±1L3±1L4 ...
17633,3252 ±0,2
17646,3252 ±0,2
19439333 ±0,3
19453333 ±0,3
Ancho B [mm] B1±0,4B2±0,4
44,853,3
63,869,5
2. Montaje
2−5Festo P.BE−MTR−DCI−IO−ES es 0501a
2.3 Montaje de ejes eléctricos
Véase la siguiente documentación cuando se monten ejeselécticos:
� Instrucciones de funcionamiento para el eje eléctricolineal utilizado
� Instrucciones para los componentes utilizados
AtenciónSi un eje está montado en posición vertical o inclinada, lacarga de trabajo puede caerse y dañar a alguien.
· Verifique si es necesario tomar medidas auxiliares exter�nas adicionales (p. ej. trinquetes de retención o pasado�res móviles).
· Utilice el motor preferentemente con husillos irreversi�bles.
Con ello se evita que caiga la masa si hay un fallo detensión inesperado.
Asegúrese de que:
· el actuador está firmemente montado y está libre detensiones en la brida de fijación
· el espacio de trabajo, en el que se mueve el eje, es detamaño suficiente para el funcionamiento con la carga
· la carga no colisiona con el motor o el reductor del ejecuando éste se desplaza a la posición final.
2. Montaje
2−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
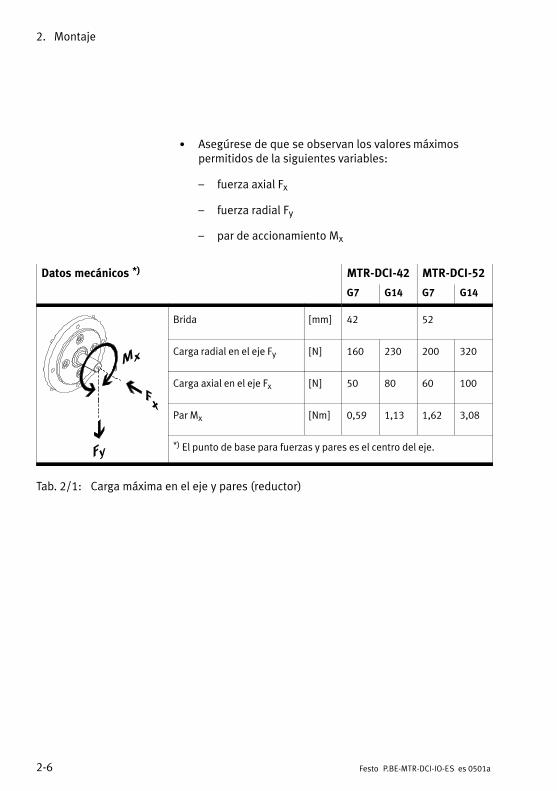
· Asegúrese de que se observan los valores máximospermitidos de la siguientes variables:
� fuerza axial Fx
� fuerza radial Fy
� par de accionamiento Mx
Datos mecánicos *) MTR−DCI−42 MTR−DCI−52
G7 G14 G7 G14
Brida [mm] 42 52
Carga radial en el eje Fy [N] 160 230 200 320
Carga axial en el eje Fx [N] 50 80 60 100
Par Mx [Nm] 0,59 1,13 1,62 3,08
*) El punto de base para fuerzas y pares es el centro del eje.
Tab.�2/1: Carga máxima en el eje y pares (reductor)
2. Montaje
2−7Festo P.BE−MTR−DCI−IO−ES es 0501a
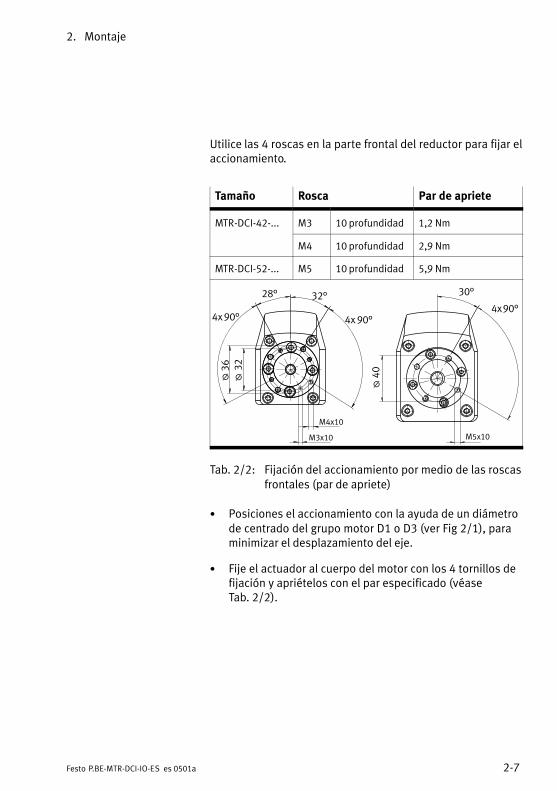
Utilice las 4 roscas en la parte frontal del reductor para fijar elaccionamiento.
Tamaño Rosca Par de apriete
MTR−DCI−42−... M3 10 profundidad 1,2 Nm
M4 10 profundidad 2,9 Nm
MTR−DCI−52−... M5 10 profundidad 5,9 Nm
4x
M5x10
40
90°32°
90°
M4x10
M3x10
3236
90°
28°
@ @@
30°
4x4x
Tab.�2/2: Fijación del accionamiento por medio de las roscasfrontales (par de apriete)
· Posiciones el accionamiento con la ayuda de un diámetrode centrado del grupo motor D1 o D3 (ver Fig 2/1), paraminimizar el desplazamiento del eje.
· Fije el actuador al cuerpo del motor con los 4 tornillos defijación y apriételos con el par especificado (véaseTab.�2/2).
2. Montaje
2−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
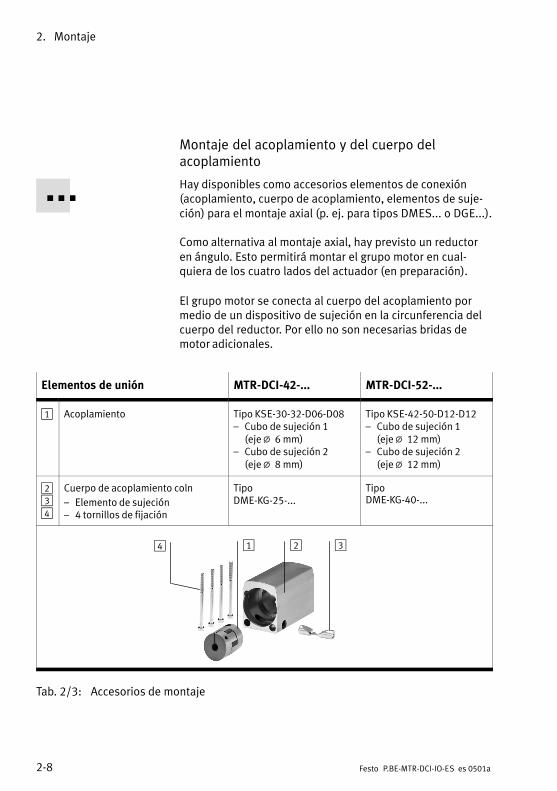
Montaje del acoplamiento y del cuerpo delacoplamiento
Hay disponibles como accesorios elementos de conexión(acoplamiento, cuerpo de acoplamiento, elementos de suje�ción) para el montaje axial (p. ej. para tipos DMES... o DGE...).
Como alternativa al montaje axial, hay previsto un reductoren ángulo. Esto permitirá montar el grupo motor en cual�quiera de los cuatro lados del actuador (en preparación).
El grupo motor se conecta al cuerpo del acoplamiento pormedio de un dispositivo de sujeción en la circunferencia delcuerpo del reductor. Por ello no son necesarias bridas demotor adicionales.
Elementos de unión MTR−DCI−42−... MTR−DCI−52−...
1 Acoplamiento Tipo KSE−30−32−D06−D08� Cubo de sujeción 1
(eje @ 6 mm)� Cubo de sujeción 2
(eje @ 8 mm)
Tipo KSE−42−50−D12−D12� Cubo de sujeción 1
(eje @ 12 mm)� Cubo de sujeción 2
(eje @ 12 mm)
234
Cuerpo de acoplamiento coln� Elemento de sujeción� 4 tornillos de fijación
TipoDME−KG−25−...
TipoDME−KG−40−...
1 2 34
Tab.�2/3: Accesorios de montaje
2. Montaje
2−9Festo P.BE−MTR−DCI−IO−ES es 0501a
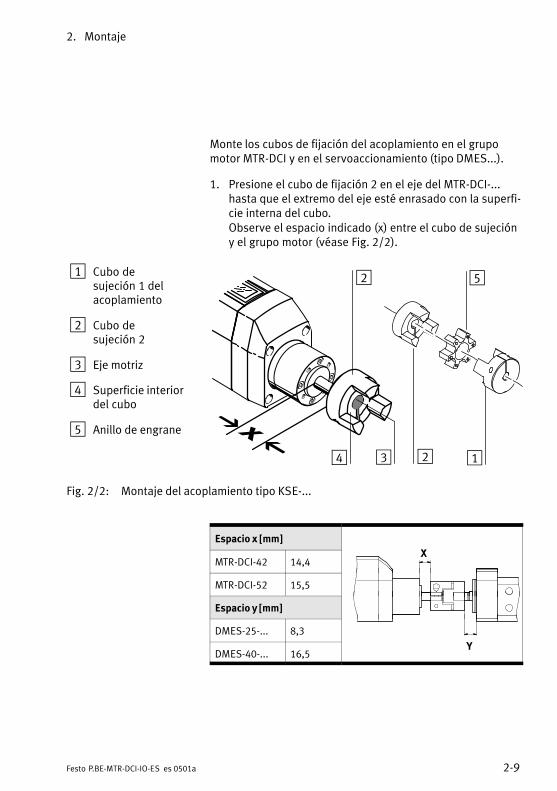
Monte los cubos de fijación del acoplamiento en el grupomotor MTR−DCI y en el servoaccionamiento (tipo DMES...).
1. Presione el cubo de fijación 2 en el eje del MTR−DCI−...hasta que el extremo del eje esté enrasado con la superfi�cie interna del cubo. Observe el espacio indicado (x) entre el cubo de sujecióny el grupo motor (véase Fig.�2/2).
1 Cubo desujeción�1 delacoplamiento
2 Cubo desujeción�2
3 Eje motriz
4 Superficie interiordel cubo
5 Anillo de engrane
2
4 3 12
5
Fig.�2/2: Montaje del acoplamiento tipo KSE−...
Espacio x [mm]
MTR−DCI−42 14,4
MTR−DCI−52 15,5
Espacio y [mm]
DMES−25−... 8,3
DMES−40−... 16,5
2. Montaje
2−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
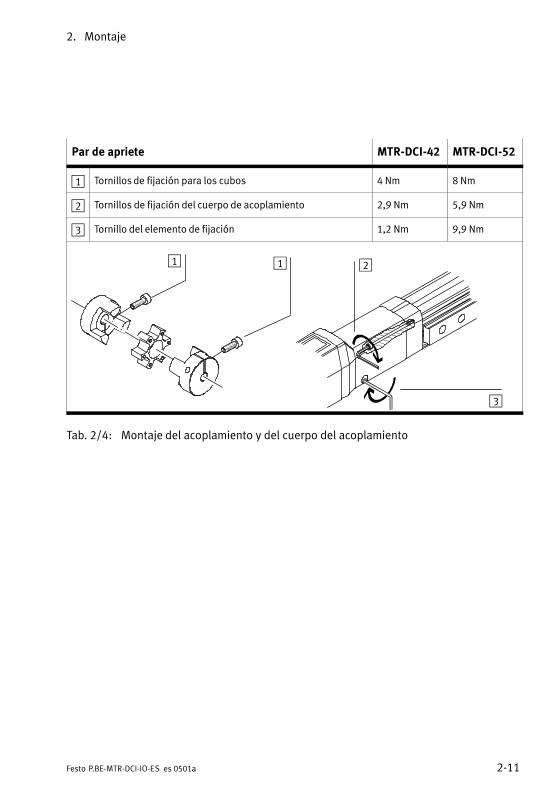
2. Engrase ligeramente el cubo de acoplamiento antes deapretarlo. Con ello se asegura de que la unión por pin�zado podrá aflojarse fácilmente.
3. Apriete el tornillo de fijación engrasado con el par especi�ficado (véase Tab.�2/4). Los tornillos no deben sobresalir.
4. Presione el cubo de fijación 1 en el eje del servoacciona�miento hasta que el extremo del eje esté enrasado con lasuperficie interna del cubo. Observe el espacio indicado (y) entre el cubo de sujecióny el accionamiento (véase Fig.�2/2).
5. Repita los pasos 2 y 3 para fijar el cubo de sujeción 1 enel servoaccionamiento.
6. Presione el anillo de engrane en uno de los cubos desujeción.
Monte el cuerpo de acoplamiento tipo DME−KG...
1. Fije el cuerpo de acoplamiento tipo DME−KG... con los4�tornillos en el servoaccionamiento (par de apriete:véase Tab.�2/4).
2. Presione el elemento de sujeción en el agujero en el ladodel cuerpo del acoplamiento.
3. Presione el motor con el cubo de sujeción correctamentecolocado en el cuerpo del acoplamiento (si es necesario,haga girar el motor).
4. Apriete el tornillo del elemento de fijación con el parespecificado (véase Tab.�2/4).
2. Montaje
2−11Festo P.BE−MTR−DCI−IO−ES es 0501a
Par de apriete MTR−DCI−42 MTR−DCI−52
1 Tornillos de fijación para los cubos 4 Nm 8 Nm
2 Tornillos de fijación del cuerpo de acoplamiento 2,9 Nm 5,9 Nm
3 Tornillo del elemento de fijación 1,2 Nm 9,9 Nm
1 2
3
1
Tab.�2/4: Montaje del acoplamiento y del cuerpo del acoplamiento

2. Montaje
2−12 Festo P.BE−MTR−DCI−IO−ES es 0501a
Instalación
3−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Capítulo 3
3. Instalación
3−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
3. Instalación 3−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Resumen de la instalación 3−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Alimentación 3−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Interface serie 3−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Entrada para el interruptor de referencia externa 3−10 . . . . . . . . . . . . . . . . . . . . .
3.5 Conexión del control de nivel superior 3−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Instalación
3−3Festo P.BE−MTR−DCI−IO−ES es 0501a
3.1 Resumen de la instalación
AtenciónAntes de realizar trabajos de instalación o mantenimiento,desconecte siempre la alimentación de los componenteselectrónicos.
Con ello se evita:
� movimientos no deseados de actuadores conectados.
� estados de conmutación indefinidos de los componenteselectrónicos.
PrecauciónLos cables mal preparados pueden dañar la electrónica ydisparar movimientos inesperados del motor.
· Utilice sólo los cables indicados como accesorios paraconectar los componentes eléctricos del sistema (véaseTab.�3/1). Sólo así es posible garantizar un correctofuncionamiento del sistema.
Por favor, observar· Instale todos los cables móviles y cables de sensoreslibres de dobleces y de esfuerzos mecánicos, si esnecesario, en una cadena de arrastre.
· Observe las longitudes máximas especificadas de loscables.
3. Instalación
3−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
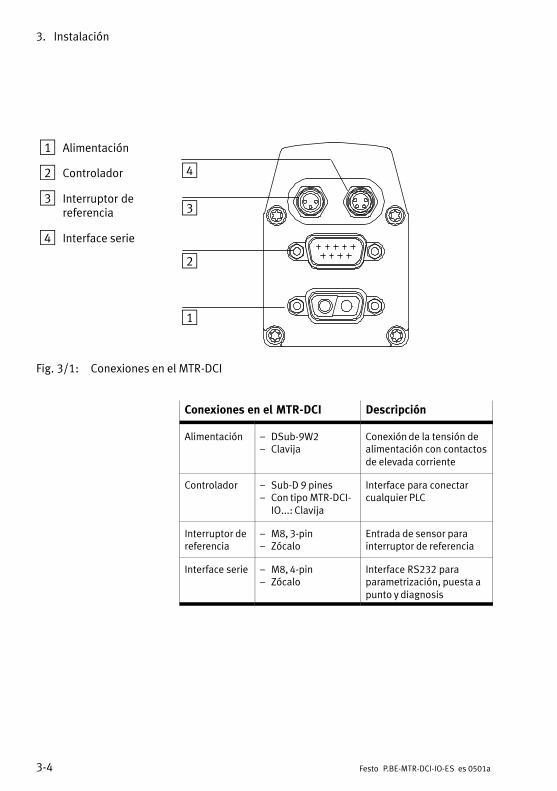
1 Alimentación
2 Controlador
3 Interruptor dereferencia
4 Interface serie
1
2
3
4
Fig.�3/1: Conexiones en el MTR−DCI
Conexiones en el MTR−DCI Descripción
Alimentación � DSub−9W2� Clavija
Conexión de la tensión dealimentación con contactosde elevada corriente
Controlador � Sub−D 9 pines� Con tipo MTR−DCI−
IO...: Clavija
Interface para conectarcualquier PLC
Interruptor dereferencia
� M8, 3−pin� Zócalo
Entrada de sensor parainterruptor de referencia
Interface serie � M8, 4−pin� Zócalo
Interface RS232 paraparametrización, puesta apunto y diagnosis
3. Instalación
3−5Festo P.BE−MTR−DCI−IO−ES es 0501a
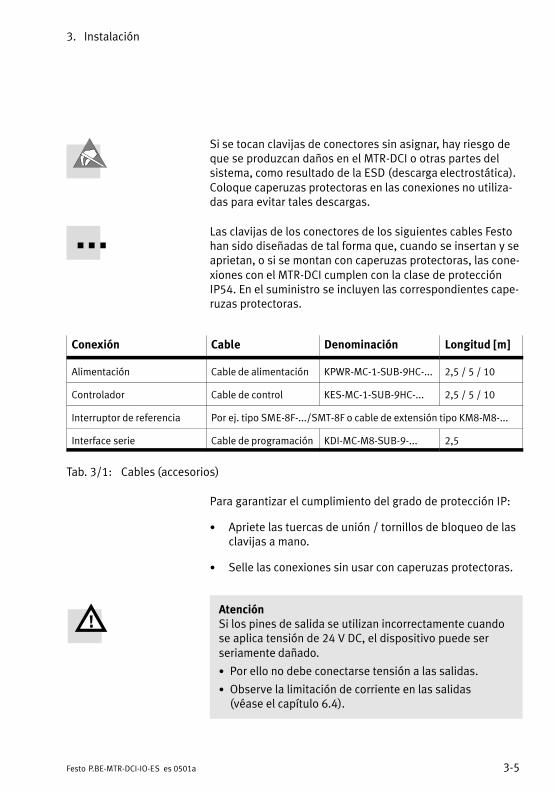
Si se tocan clavijas de conectores sin asignar, hay riesgo deque se produzcan daños en el MTR−DCI o otras partes delsistema, como resultado de la ESD (descarga electrostática).Coloque caperuzas protectoras en las conexiones no utiliza�das para evitar tales descargas.
Las clavijas de los conectores de los siguientes cables Festohan sido diseñadas de tal forma que, cuando se insertan y seaprietan, o si se montan con caperuzas protectoras, las cone�xiones con el MTR−DCI cumplen con la clase de protecciónIP54. En el suministro se incluyen las correspondientes cape�ruzas protectoras.
Conexión Cable Denominación Longitud [m]
Alimentación Cable de alimentación KPWR−MC−1−SUB−9HC−... 2,5 / 5 / 10
Controlador Cable de control KES−MC−1−SUB−9HC−... 2,5 / 5 / 10
Interruptor de referencia Por ej. tipo SME−8F−.../SMT−8F o cable de extensión tipo KM8−M8−...
Interface serie Cable de programación KDI−MC−M8−SUB−9−... 2,5
Tab.�3/1: Cables (accesorios)
Para garantizar el cumplimiento del grado de protección IP:
· Apriete las tuercas de unión / tornillos de bloqueo de lasclavijas a mano.
· Selle las conexiones sin usar con caperuzas protectoras.
AtenciónSi los pines de salida se utilizan incorrectamente cuandose aplica tensión de 24 V DC, el dispositivo puede serseriamente dañado.
· Por ello no debe conectarse tensión a las salidas.
· Observe la limitación de corriente en las salidas (véase el capítulo 6.4).
3. Instalación
3−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
3.2 Alimentación
Atención· Utilice sólo circuitos PELV según IEC/DIN EN 60204−1(Tensión extra−baja protegida) para la alimentacióneléctrica.Preste también atención a las exigencias generales paracircuitos PELV de conformidad con IEC/DIN EN60204−1.
· Utilice exclusivamente fuentes de corriente que garanti�cen una desconexión electrónica segura de la tensión deservicio conforme a la IEC/DIN EN 60204−1.
Al utilizar circuitos PELV, se garantiza la protección contra lasdescargas eléctricas (protección contra contacto directo eindirecto) según IEC/DIN EN 60204−1. (Equipamientoeléctrico para máquinas, requerimientos generales).
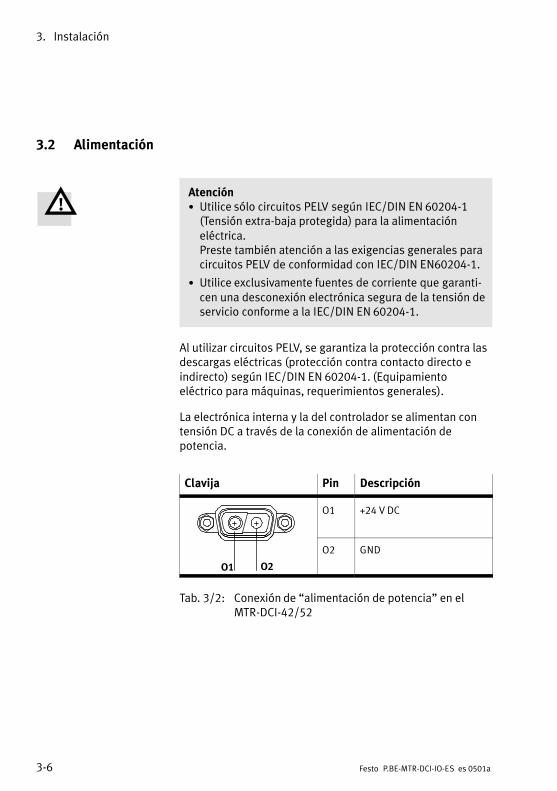
La electrónica interna y la del controlador se alimentan contensión DC a través de la conexión de alimentación depotencia.
Clavija Pin Descripción
O1 +24 V DC
O1 O2
O2 GND
Tab.�3/2: Conexión de �alimentación de potencia" en elMTR−DCI−42/52
3. Instalación
3−7Festo P.BE−MTR−DCI−IO−ES es 0501a
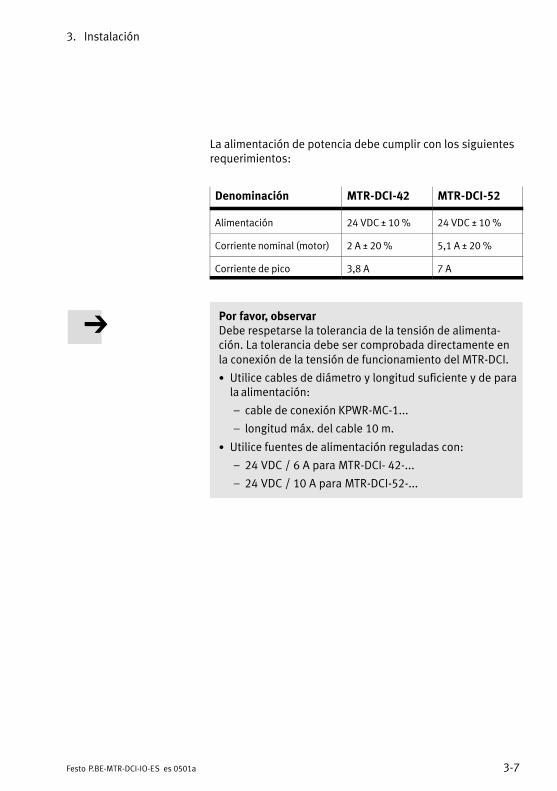
La alimentación de potencia debe cumplir con los siguientesrequerimientos:
Denominación MTR−DCI−42 MTR−DCI−52
Alimentación 24 VDC ± 10 % 24 VDC ± 10 %
Corriente nominal (motor) 2 A ± 20 % 5,1 A ± 20 %
Corriente de pico 3,8 A 7 A
Por favor, observarDebe respetarse la tolerancia de la tensión de alimenta�ción. La tolerancia debe ser comprobada directamente enla conexión de la tensión de funcionamiento del MTR−DCI.
· Utilice cables de diámetro y longitud suficiente y de parala alimentación:
� cable de conexión KPWR−MC−1...
� longitud máx. del cable 10 m.
· Utilice fuentes de alimentación reguladas con:
� 24 VDC / 6 A para MTR−DCI− 42−...
� 24 VDC / 10 A para MTR−DCI−52−...
3. Instalación
3−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
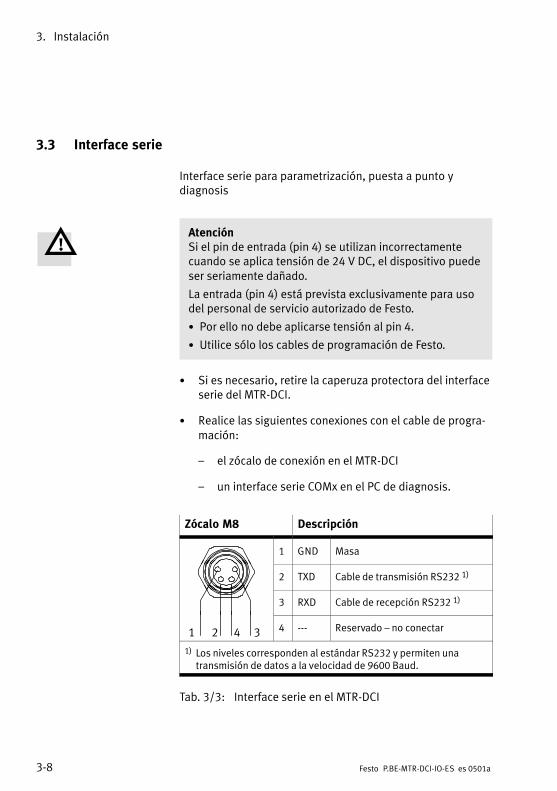
3.3 Interface serie
Interface serie para parametrización, puesta a punto ydiagnosis
AtenciónSi el pin de entrada (pin 4) se utilizan incorrectamentecuando se aplica tensión de 24 V DC, el dispositivo puedeser seriamente dañado.
La entrada (pin 4) está prevista exclusivamente para usodel personal de servicio autorizado de Festo.
· Por ello no debe aplicarse tensión al pin 4.
· Utilice sólo los cables de programación de Festo.
· Si es necesario, retire la caperuza protectora del interfaceserie del MTR−DCI.
· Realice las siguientes conexiones con el cable de progra�mación:
� el zócalo de conexión en el MTR−DCI
� un interface serie COMx en el PC de diagnosis.
Zócalo M8 Descripción
1 GND Masa
2 TXD Cable de transmisión RS232 1)
3 RXD Cable de recepción RS232 1)
1 2 4 3 4 −−− Reservado � no conectar
1) Los niveles corresponden al estándar RS232 y permiten una transmisión de datos a la velocidad de 9600 Baud.
Tab.�3/3: Interface serie en el MTR−DCI

3. Instalación
3−9Festo P.BE−MTR−DCI−IO−ES es 0501a
La información sobre la puesta a punto y parametrización delMTR−DCI a través del interface serie puede hallarse en el capí�tulo 5.2.1 y en el sistema de ayuda para el paquete de soft�ware FCT. La información sobre la transmisión de órdenes CI a travésdel interface serie puede hallarse en el capítulo 7.
Por favor, observarEl interface RS232 no está eléctricamente aislado. No estáprevisto para una conexión permanente a sistemas PC nicomo interface de control.
· Utilice esta conexión sólo para la puesta a punto.
· No sobrepasar la longitud máxima permitida de 2,5 men los cables de señales.
· Desconecte el cable de diagnosis durante el funciona�miento continuo.
· Cierre la conexión con la caperuza de protección sumi�nistrada (tipo ISK−M8).
3. Instalación
3−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
3.4 Entrada para el interruptor de referencia externa
Si no utiliza un interruptor de referencia:
· Cierre la conexión con la caperuza de protecciónsuministrada (tipo ISK−M8).
Conexión del interruptor de referencia:
· Utilice el tipo de interruptor correcto �normalmenteabierto" para el interruptor de referencia.
· Para conectar el interruptor de referencia utilice un cablecon conector roscado en el extremo, por ejemplo tipoSME−8F−.../SMT−8F o el cable de extensión KM8−M8−...�.
· Al seleccionar el detector, observe que la precisión de supunto de conmutación determina la precisión del puntode referencia.
Utilice, p. ej. los siguientes detectores de proximidad deFesto:
� detector de proximidad eléctrico SME−8/SMT−8 (pueden montarse en la ranura para sensores del perfildel actuador).
Precisión de conmutación:
� SME−8: 0,2 mm (± 0,1 mm)
� SMT−8: 0,4 mm (± 0,2 mm)
� detector de proximidad inductivo SIEN−..−M8 (puede utili�zarse en ejecución deslizante junto con la leva de conmu�tación SF / soporte para detectores HWS); precisión deconmutación: 0,08 mm.
3. Instalación
3−11Festo P.BE−MTR−DCI−IO−ES es 0501a
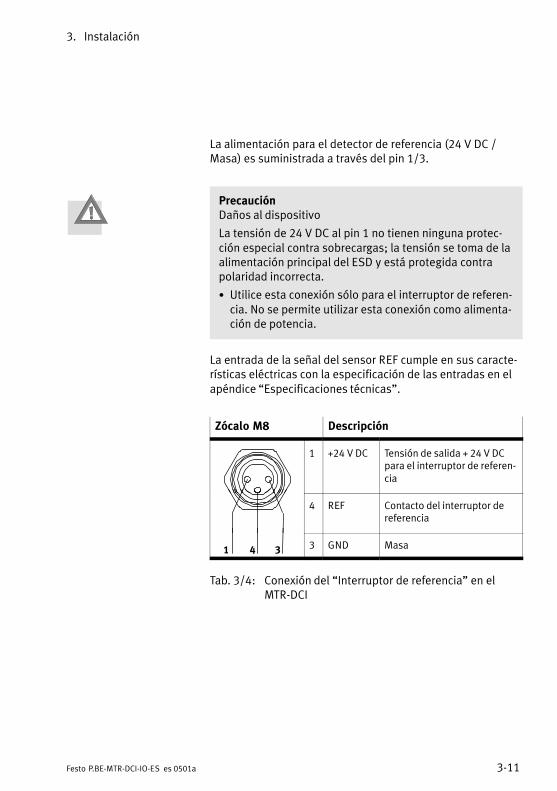
La alimentación para el detector de referencia (24 V DC /Masa) es suministrada a través del pin 1/3.
PrecauciónDaños al dispositivo
La tensión de 24 V DC al pin 1 no tienen ninguna protec�ción especial contra sobrecargas; la tensión se toma de laalimentación principal del ESD y está protegida contrapolaridad incorrecta.
· Utilice esta conexión sólo para el interruptor de referen�cia. No se permite utilizar esta conexión como alimenta�ción de potencia.
La entrada de la señal del sensor REF cumple en sus caracte�rísticas eléctricas con la especificación de las entradas en elapéndice �Especificaciones técnicas".
Zócalo M8 Descripción
1 +24 V DC Tensión de salida + 24 V DCpara el interruptor de referen�cia
4 REF Contacto del interruptor dereferencia
1 4 3 3 GND Masa
Tab.�3/4: Conexión del �Interruptor de referencia" en elMTR−DCI
3. Instalación
3−12 Festo P.BE−MTR−DCI−IO−ES es 0501a
3.5 Conexión del control de nivel superior
La información sobre el control a través de sistemas de buspuede hallarse en los manuales para la variante de bus decampo correspondiente del MTR−DCI−... (en preparación).
En el caso de control a través de I/Os digitales(tipo�MTR−DCI−IO...) observe las instrucciones sobre laconexión y sobre la función del interface de I/O en elcapítulo�6.

Panel de control (MTR−DCI−...−H2−IO)
4−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Capítulo 4
4. Panel de control (MTR−DCI−...−H2−IO)
4−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
4. Panel de control (MTR−DCI−...−H2−IO) 4−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Composición y función del panel de control 4−4 . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 El sistema de menú 4−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Acceso al menú principal 4−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Menú �Diagnostic" 4−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.3 Control del dispositivo �control HMI" 4−10 . . . . . . . . . . . . . . . . . . . . . . .
4.2.4 Menú �Settings" 4−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.5 Menú �Positioning" 4−17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4. Panel de control (MTR−DCI−...−H2−IO)
4−3Festo P.BE−MTR−DCI−IO−ES es 0501a
El grupo motor tipo MTR−DCI−...−H2 ofrece en el panel de con�trol todas las funciones necesarias para la puesta a punto,programación y diagnosis. Un resumen de las funciones delos botones y el menú del MTR−DCI−IO puede hallarse en estecapítulo. La puesta a punto con el panel de control de des�cribe a partir del capítulo 5.2.2. Las funciones del panel decontrol para las variantes de bus de campo puede hallarse enel manual para la correspondiente variante del producto.
Con el MTR−DCI−...−H1 (sin panel de control) puede ponerse apunto el MTR−DCI a través del interface RS232 (con el soft�ware FCT). Las instrucciones sobre ello puede hallarse en elcapítulo 5.2.1.
PrecauciónPuede producirse fallos si intenta acceder a las funcionesoperativas y de control al mismo tiempo desde el FCT ydesde el panel de control.
· Asegúrese de que el FCT, el panel de control y el inter�face de control del MTR−DCI no se utilizan al mismotiempo.
Por favor, observarSi es necesario, retire la lámina protectora del displayantes de empezar la puesta a punto.
4. Panel de control (MTR−DCI−...−H2−IO)
4−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
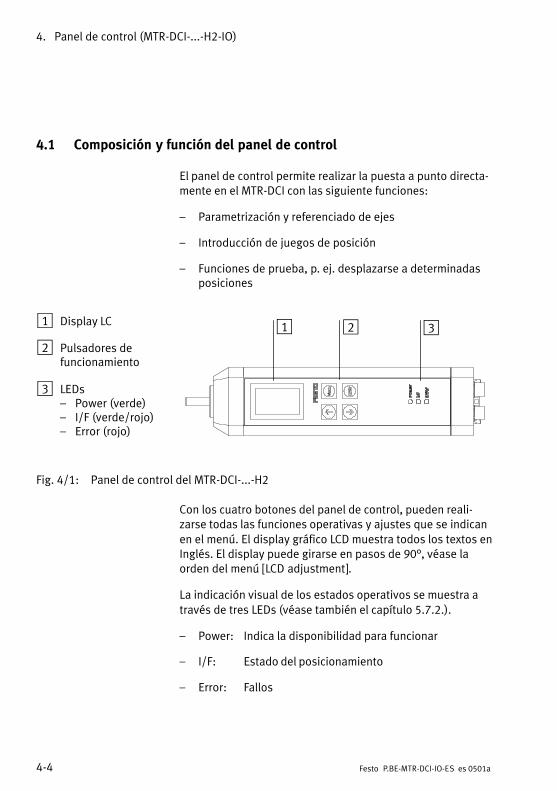
4.1 Composición y función del panel de control
El panel de control permite realizar la puesta a punto directa�mente en el MTR−DCI con las siguiente funciones:
� Parametrización y referenciado de ejes
� Introducción de juegos de posición
� Funciones de prueba, p. ej. desplazarse a determinadasposiciones
1 Display LC
2 Pulsadores defuncionamiento
3 LEDs� Power (verde)� I/F (verde/rojo)� Error (rojo)
1 32
Fig.�4/1: Panel de control del MTR−DCI−...−H2
Con los cuatro botones del panel de control, pueden reali�zarse todas las funciones operativas y ajustes que se indicanen el menú. El display gráfico LCD muestra todos los textos enInglés. El display puede girarse en pasos de 90°, véase laorden del menú [LCD adjustment].
La indicación visual de los estados operativos se muestra através de tres LEDs (véase también el capítulo 5.7.2.).
� Power: Indica la disponibilidad para funcionar
� I/F: Estado del posicionamiento
� Error: Fallos
4. Panel de control (MTR−DCI−...−H2−IO)
4−5Festo P.BE−MTR−DCI−IO−ES es 0501a
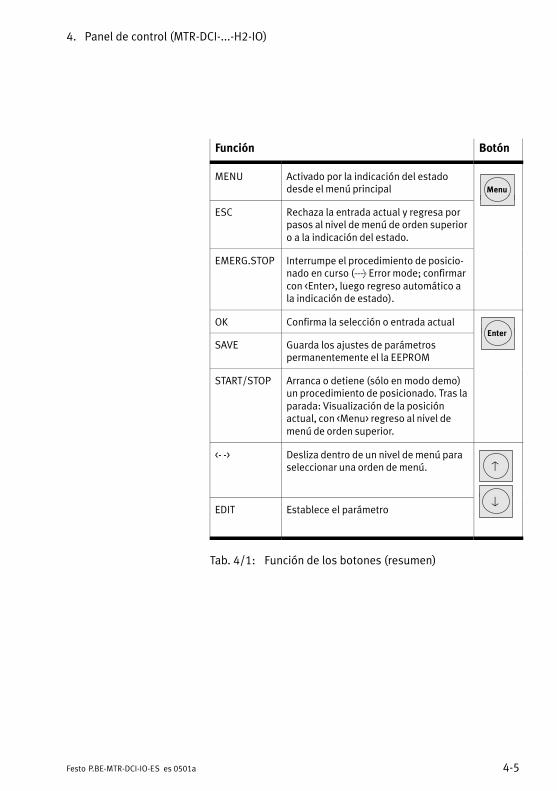
Función Botón
MENU Activado por la indicación del estadodesde el menú principal Menu
ESC Rechaza la entrada actual y regresa porpasos al nivel de menú de orden superioro a la indicación del estado.
EMERG.STOP Interrumpe el procedimiento de posicio�nado en curso (> Error mode; confirmarcon <Enter>, luego regreso automático ala indicación de estado).
OK Confirma la selección o entrada actualEnter
SAVE Guarda los ajustes de parámetrospermanentemente el la EEPROM
Enter
START/STOP Arranca o detiene (sólo en modo demo)un procedimiento de posicionado. Tras laparada: Visualización de la posiciónactual, con <Menu> regreso al nivel demenú de orden superior.
<− −> Desliza dentro de un nivel de menú paraseleccionar una orden de menú. v
VEDIT Establece el parámetro
V
Tab.�4/1: Función de los botones (resumen)
MTR�DCI...Xa = 0.00 mm
HMI:off<Menu>
} Diagnostic
positioning
Settings
S ESC <Menu><��> OK <Enter>
} HMI control
LCD adjustment
S ESC <Menu><��> OK <Enter>
4. Panel de control (MTR−DCI−...−H2−IO)
4−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
4.2 El sistema de menú
4.2.1 Acceso al menú principal
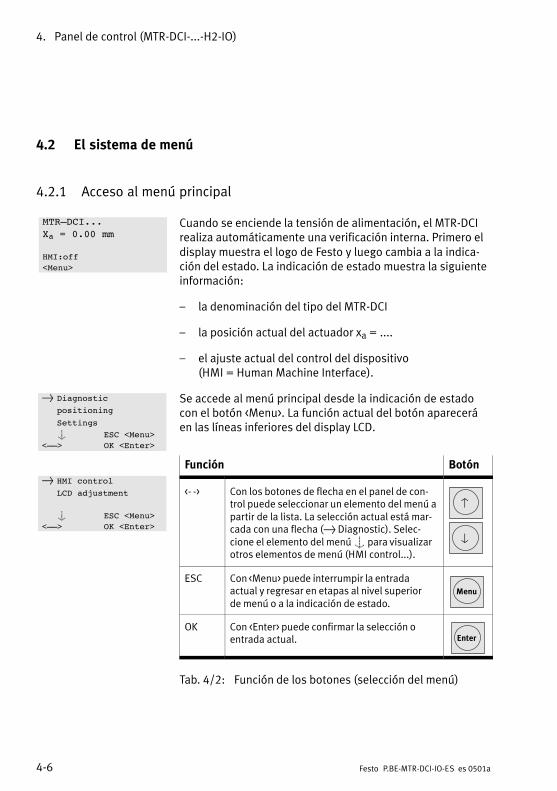
Cuando se enciende la tensión de alimentación, el MTR−DCIrealiza automáticamente una verificación interna. Primero eldisplay muestra el logo de Festo y luego cambia a la indica�ción del estado. La indicación de estado muestra la siguienteinformación:
� la denominación del tipo del MTR−DCI
� la posición actual del actuador xa = ....
� el ajuste actual del control del dispositivo (HMI = Human Machine Interface).
Se accede al menú principal desde la indicación de estadocon el botón <Menu>. La función actual del botón apareceráen las líneas inferiores del display LCD.
Función Botón
<− −> Con los botones de flecha en el panel de con�trol puede seleccionar un elemento del menú apartir de la lista. La selección actual está mar�cada con una flecha (} Diagnostic). Selec�cione el elemento del menú S para visualizarotros elementos de menú (HMI control...).
v
V
ESC Con <Menu> puede interrumpir la entradaactual y regresar en etapas al nivel superiorde menú o a la indicación de estado.
Menu
OK Con <Enter> puede confirmar la selección oentrada actual. Enter
Tab.�4/2: Función de los botones (selección del menú)
4. Panel de control (MTR−DCI−...−H2−IO)
4−7Festo P.BE−MTR−DCI−IO−ES es 0501a
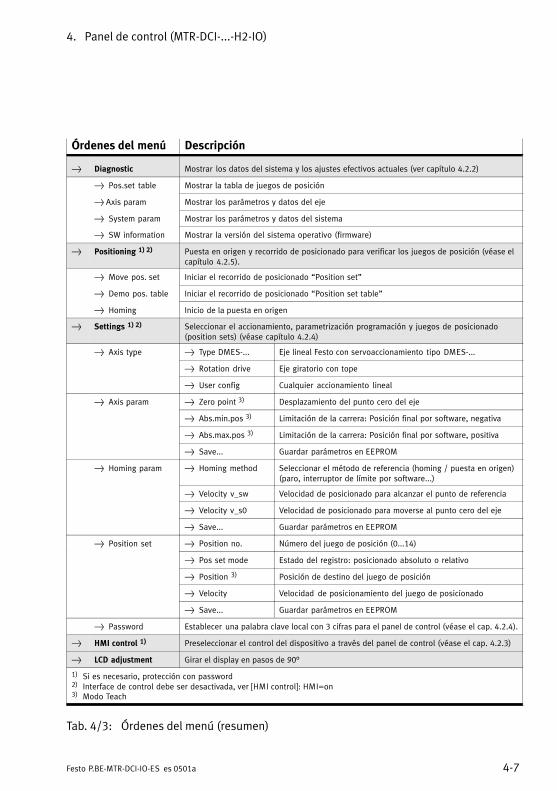
Órdenes del menú Descripción
} Diagnostic Mostrar los datos del sistema y los ajustes efectivos actuales (ver capítulo 4.2.2)
} Pos.set table Mostrar la tabla de juegos de posición
} Axis param Mostrar los parámetros y datos del eje
} System param Mostrar los parámetros y datos del sistema
} SW information Mostrar la versión del sistema operativo (firmware)
} Positioning 1) 2) Puesta en origen y recorrido de posicionado para verificar los juegos de posición (véase�elcapítulo 4.2.5).
} Move pos. set Iniciar el recorrido de posicionado �Position set"
} Demo pos. table Iniciar el recorrido de posicionado �Position set table"
} Homing Inicio de la puesta en origen
} Settings 1) 2) Seleccionar el accionamiento, parametrización programación y juegos de posicionado(position sets) (véase capítulo 4.2.4)
} Axis type } Type DMES−... Eje lineal Festo con servoaccionamiento tipo DMES−...} yp
} Rotation drive Eje giratorio con tope
} User config Cualquier accionamiento lineal
} Axis param } Zero point 3) Desplazamiento del punto cero del eje} p
} Abs.min.pos 3) Limitación de la carrera: Posición final por software, negativa
} Abs.max.pos 3) Limitación de la carrera: Posición final por software, positiva
} Save... Guardar parámetros en EEPROM
} Homing param } Homing method Seleccionar el método de referencia (homing / puesta en origen)(paro, interruptor de límite por software...)
} Velocity v_sw Velocidad de posicionado para alcanzar el punto de referencia
} Velocity v_s0 Velocidad de posicionado para moverse al punto cero del eje
} Save... Guardar parámetros en EEPROM
} Position set } Position no. Número del juego de posición (0...14)}
} Pos set mode Estado del registro: posicionado absoluto o relativo
} Position 3) Posición de destino del juego de posición
} Velocity Velocidad de posicionamiento del juego de posicionado
} Save... Guardar parámetros en EEPROM
} Password Establecer una palabra clave local con 3 cifras para el panel de control (véase el cap. 4.2.4).
} HMI control 1) Preseleccionar el control del dispositivo a través del panel de control (véase el cap. 4.2.3)
} LCD adjustment Girar el display en pasos de 90°
1) Si es necesario, protección con password2) Interface de control debe ser desactivada, ver [HMI control]: HMI=on3) Modo Teach
Tab.�4/3: Órdenes del menú (resumen)
} Diagnostic
} Pos.set table
Axis param
System param
SW information
4. Panel de control (MTR−DCI−...−H2−IO)
4−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
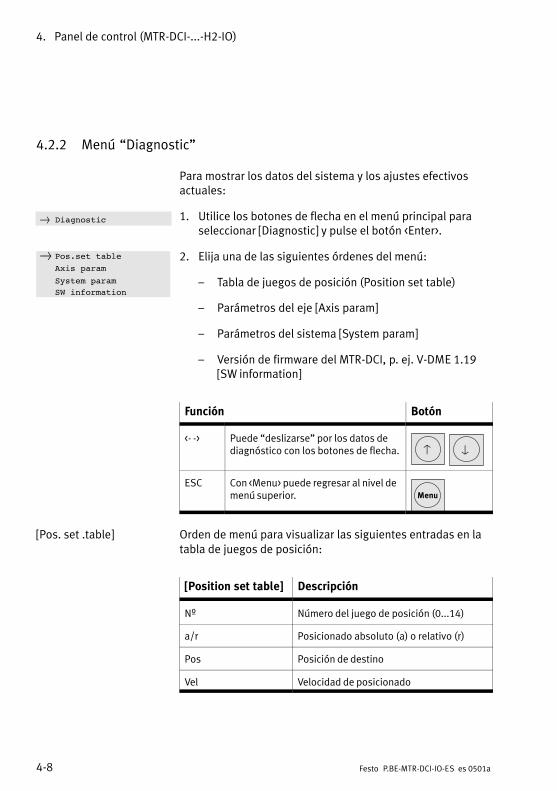
4.2.2 Menú �Diagnostic"
Para mostrar los datos del sistema y los ajustes efectivosactuales:
1. Utilice los botones de flecha en el menú principal paraseleccionar [Diagnostic] y pulse el botón <Enter>.
2. Elija una de las siguientes órdenes del menú:
� Tabla de juegos de posición (Position set table)
� Parámetros del eje [Axis param]
� Parámetros del sistema [System param]
� Versión de firmware del MTR−DCI, p. ej. V−DME 1.19 [SW information]
Función Botón
<− −> Puede �deslizarse" por los datos dediagnóstico con los botones de flecha. v V
ESC Con <Menu> puede regresar al nivel demenú superior. Menu
[Pos. set .table] Orden de menú para visualizar las siguientes entradas en latabla de juegos de posición:
[Position set table] Descripción
Nº Número del juego de posición (0...14)
a/r Posicionado absoluto (a) o relativo (r)
Pos Posición de destino
Vel Velocidad de posicionado
4. Panel de control (MTR−DCI−...−H2−IO)
4−9Festo P.BE−MTR−DCI−IO−ES es 0501a
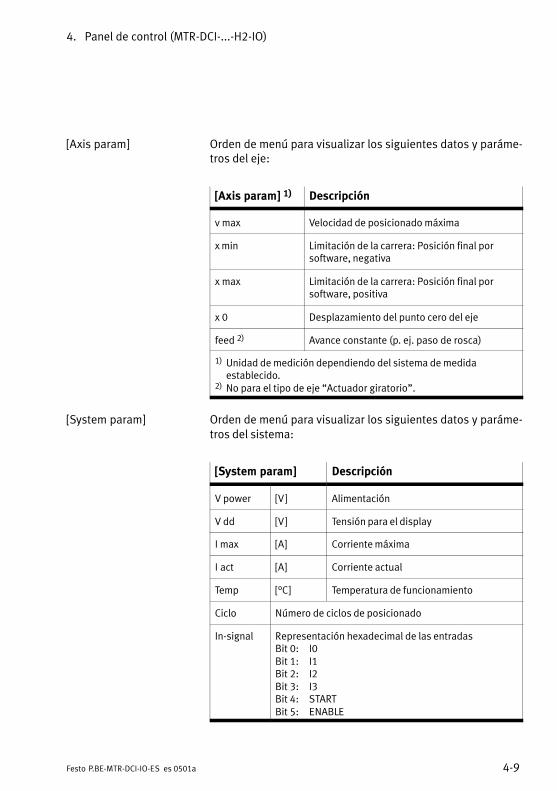
[Axis param] Orden de menú para visualizar los siguientes datos y paráme�tros del eje:
[Axis param] 1) Descripción
v max Velocidad de posicionado máxima
x min Limitación de la carrera: Posición final porsoftware, negativa
x max Limitación de la carrera: Posición final porsoftware, positiva
x 0 Desplazamiento del punto cero del eje
feed 2) Avance constante (p. ej. paso de rosca)
1) Unidad de medición dependiendo del sistema de medida establecido.
2) No para el tipo de eje �Actuador giratorio".
[System param] Orden de menú para visualizar los siguientes datos y paráme�tros del sistema:
[System param] Descripción
V power [V] Alimentación
V dd [V] Tensión para el display
I max [A] Corriente máxima
I act [A] Corriente actual
Temp [°C] Temperatura de funcionamiento
Ciclo Número de ciclos de posicionado
In−signal Representación hexadecimal de las entradasBit 0: I0Bit 1: I1Bit 2: I2Bit 3: I3Bit 4: STARTBit 5: ENABLE
4. Panel de control (MTR−DCI−...−H2−IO)
4−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
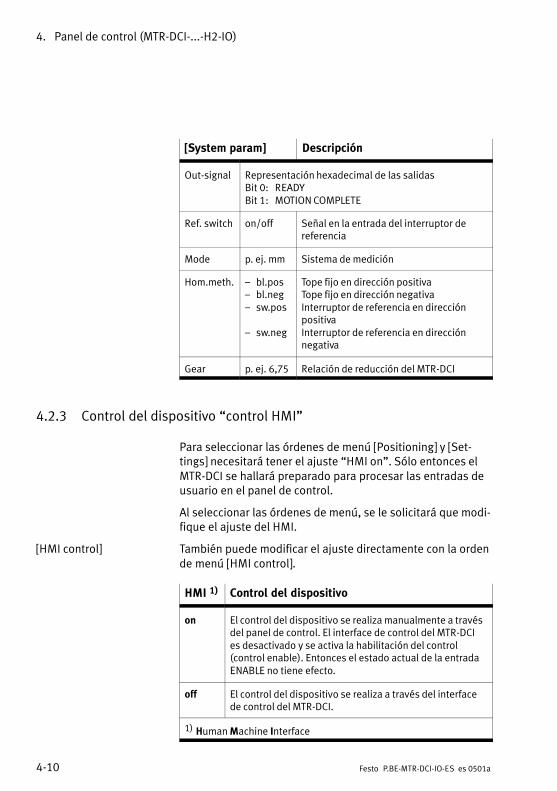
[System param] Descripción
Out−signal Representación hexadecimal de las salidasBit 0: READYBit 1: MOTION COMPLETE
Ref. switch on/off Señal en la entrada del interruptor dereferencia
Mode p. ej. mm Sistema de medición
Hom.meth. � bl.pos� bl.neg� sw.pos
� sw.neg
Tope fijo en dirección positivaTope fijo en dirección negativaInterruptor de referencia en direcciónpositivaInterruptor de referencia en direcciónnegativa
Gear p. ej. 6,75 Relación de reducción del MTR−DCI
4.2.3 Control del dispositivo �control HMI"
Para seleccionar las órdenes de menú [Positioning] y [Set�tings] necesitará tener el ajuste �HMI on". Sólo entonces elMTR−DCI se hallará preparado para procesar las entradas deusuario en el panel de control.
Al seleccionar las órdenes de menú, se le solicitará que modi�fique el ajuste del HMI.
[HMI control] También puede modificar el ajuste directamente con la ordende menú [HMI control].
HMI 1) Control del dispositivo
on El control del dispositivo se realiza manualmente a travésdel panel de control. El interface de control del MTR−DCIes desactivado y se activa la habilitación del control(control enable). Entonces el estado actual de la entradaENABLE no tiene efecto.
off El control del dispositivo se realiza a través del interfacede control del MTR−DCI.
1) Human Machine Interface
} Settings
} Axis typeAxis param
Homing param
Position setPassword
4. Panel de control (MTR−DCI−...−H2−IO)
4−11Festo P.BE−MTR−DCI−IO−ES es 0501a
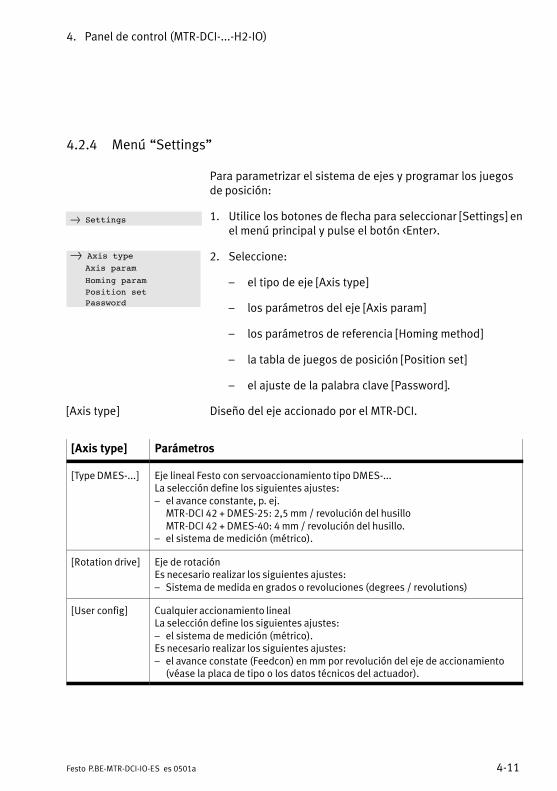
4.2.4 Menú �Settings"
Para parametrizar el sistema de ejes y programar los juegosde posición:
1. Utilice los botones de flecha para seleccionar [Settings] enel menú principal y pulse el botón <Enter>.
2. Seleccione:
� el tipo de eje [Axis type]
� los parámetros del eje [Axis param]
� los parámetros de referencia [Homing method]
� la tabla de juegos de posición [Position set]
� el ajuste de la palabra clave [Password].
[Axis type] Diseño del eje accionado por el MTR−DCI.
[Axis type] Parámetros
[Type DMES−...] Eje lineal Festo con servoaccionamiento tipo DMES−...La selección define los siguientes ajustes:� el avance constante, p. ej.
MTR−DCI 42 + DMES−25: 2,5 mm / revolución del husilloMTR−DCI 42 + DMES−40: 4 mm / revolución del husillo.
� el sistema de medición (métrico).
[Rotation drive] Eje de rotaciónEs necesario realizar los siguientes ajustes:� Sistema de medida en grados o revoluciones (degrees / revolutions)
[User config] Cualquier accionamiento linealLa selección define los siguientes ajustes:� el sistema de medición (métrico).Es necesario realizar los siguientes ajustes:� el avance constate (Feedcon) en mm por revolución del eje de accionamiento
(véase la placa de tipo o los datos técnicos del actuador).
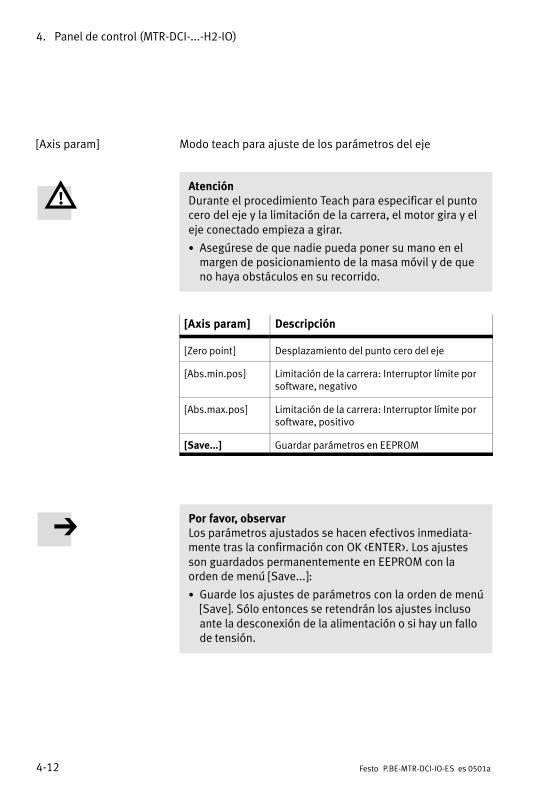
4. Panel de control (MTR−DCI−...−H2−IO)
4−12 Festo P.BE−MTR−DCI−IO−ES es 0501a
[Axis param] Modo teach para ajuste de los parámetros del eje
AtenciónDurante el procedimiento Teach para especificar el puntocero del eje y la limitación de la carrera, el motor gira y eleje conectado empieza a girar.
· Asegúrese de que nadie pueda poner su mano en elmargen de posicionamiento de la masa móvil y de queno haya obstáculos en su recorrido.
[Axis param] Descripción
[Zero point] Desplazamiento del punto cero del eje
[Abs.min.pos] Limitación de la carrera: Interruptor límite porsoftware, negativo
[Abs.max.pos] Limitación de la carrera: Interruptor límite porsoftware, positivo
[Save...] Guardar parámetros en EEPROM
Por favor, observarLos parámetros ajustados se hacen efectivos inmediata�mente tras la confirmación con OK <ENTER>. Los ajustesson guardados permanentemente en EEPROM con laorden de menú [Save...]:
· Guarde los ajustes de parámetros con la orden de menú[Save]. Sólo entonces se retendrán los ajustes inclusoante la desconexión de la alimentación o si hay un fallode tensión.
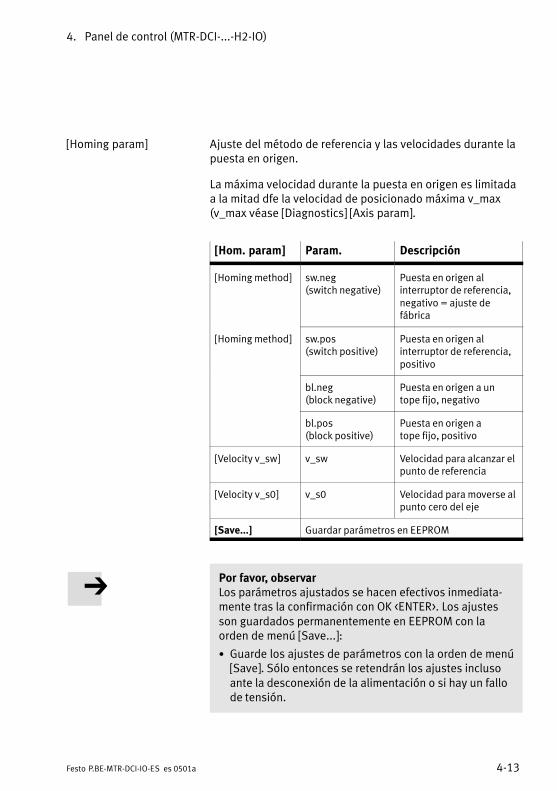
4. Panel de control (MTR−DCI−...−H2−IO)
4−13Festo P.BE−MTR−DCI−IO−ES es 0501a
[Homing param] Ajuste del método de referencia y las velocidades durante lapuesta en origen.
La máxima velocidad durante la puesta en origen es limitadaa la mitad dfe la velocidad de posicionado máxima v_max(v_max véase [Diagnostics] [Axis param].
[Hom. param] Param. Descripción
[Homing method] sw.neg(switch negative)
Puesta en origen alinterruptor de referencia,negativo = ajuste defábrica
[Homing method] sw.pos(switch positive)
Puesta en origen alinterruptor de referencia,positivo
bl.neg(block negative)
Puesta en origen a untope fijo, negativo
bl.pos(block positive)
Puesta en origen atope fijo, positivo
[Velocity v_sw] v_sw Velocidad para alcanzar elpunto de referencia
[Velocity v_s0] v_s0 Velocidad para moverse alpunto cero del eje
[Save...] Guardar parámetros en EEPROM
Por favor, observarLos parámetros ajustados se hacen efectivos inmediata�mente tras la confirmación con OK <ENTER>. Los ajustesson guardados permanentemente en EEPROM con laorden de menú [Save...]:
· Guarde los ajustes de parámetros con la orden de menú[Save]. Sólo entonces se retendrán los ajustes inclusoante la desconexión de la alimentación o si hay un fallode tensión.
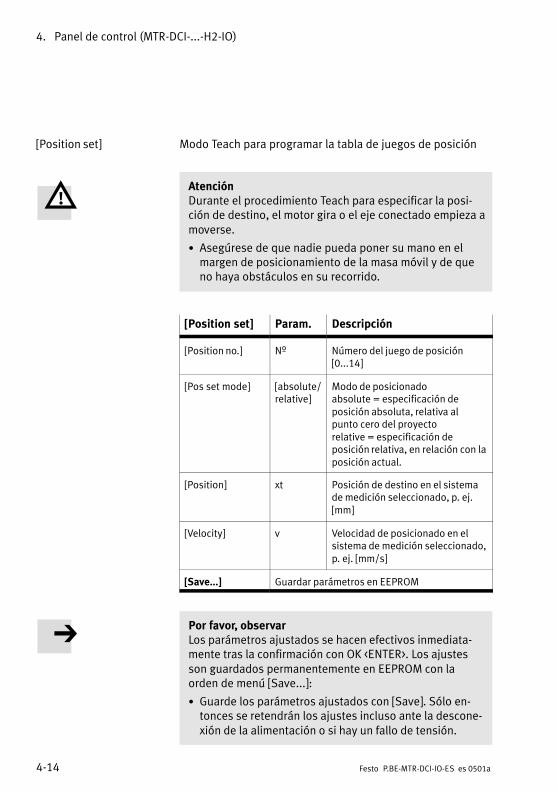
4. Panel de control (MTR−DCI−...−H2−IO)
4−14 Festo P.BE−MTR−DCI−IO−ES es 0501a
[Position set] Modo Teach para programar la tabla de juegos de posición
AtenciónDurante el procedimiento Teach para especificar la posi�ción de destino, el motor gira o el eje conectado empieza amoverse.
· Asegúrese de que nadie pueda poner su mano en elmargen de posicionamiento de la masa móvil y de queno haya obstáculos en su recorrido.
[Position set] Param. Descripción
[Position no.] Nº Número del juego de posición[0...14]
[Pos set mode] [absolute/relative]
Modo de posicionadoabsolute = especificación deposición absoluta, relativa alpunto cero del proyectorelative = especificación deposición relativa, en relación con laposición actual.
[Position] xt Posición de destino en el sistemade medición seleccionado, p. ej.[mm]
[Velocity] v Velocidad de posicionado en elsistema de medición seleccionado,p. ej. [mm/s]
[Save...] Guardar parámetros en EEPROM
Por favor, observarLos parámetros ajustados se hacen efectivos inmediata�mente tras la confirmación con OK <ENTER>. Los ajustesson guardados permanentemente en EEPROM con laorden de menú [Save...]:
· Guarde los parámetros ajustados con [Save]. Sólo en�tonces se retendrán los ajustes incluso ante la descone�xión de la alimentación o si hay un fallo de tensión.
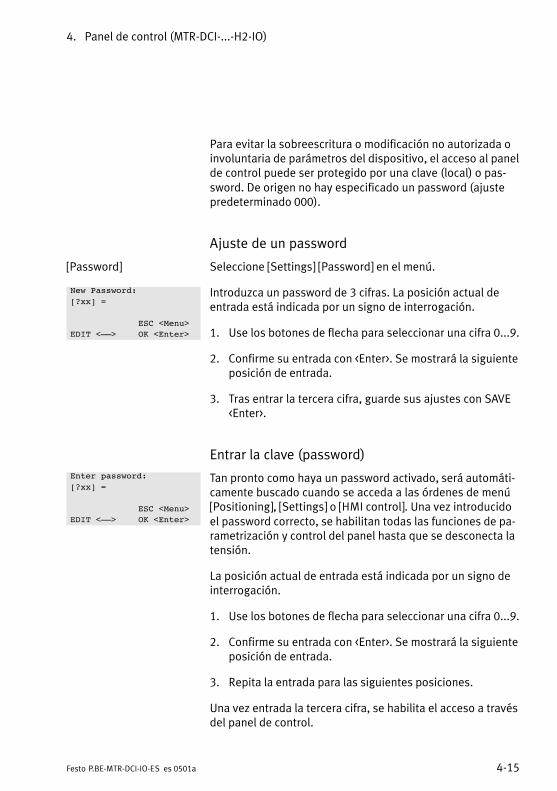
New Password:[?xx] =
ESC <Menu>EDIT <��> OK <Enter>
Enter password:[?xx] =
ESC <Menu>EDIT <��> OK <Enter>
4. Panel de control (MTR−DCI−...−H2−IO)
4−15Festo P.BE−MTR−DCI−IO−ES es 0501a
Para evitar la sobreescritura o modificación no autorizada oinvoluntaria de parámetros del dispositivo, el acceso al panelde control puede ser protegido por una clave (local) o pas�sword. De origen no hay especificado un password (ajustepredeterminado 000).
Ajuste de un password
[Password] Seleccione [Settings] [Password] en el menú.
Introduzca un password de 3 cifras. La posición actual deentrada está indicada por un signo de interrogación.
1. Use los botones de flecha para seleccionar una cifra 0...9.
2. Confirme su entrada con <Enter>. Se mostrará la siguienteposición de entrada.
3. Tras entrar la tercera cifra, guarde sus ajustes con SAVE<Enter>.
Entrar la clave (password)
Tan pronto como haya un password activado, será automáti�camente buscado cuando se acceda a las órdenes de menú[Positioning], [Settings] o [HMI control]. Una vez introducidoel password correcto, se habilitan todas las funciones de pa�rametrización y control del panel hasta que se desconecta latensión.
La posición actual de entrada está indicada por un signo deinterrogación.
1. Use los botones de flecha para seleccionar una cifra 0...9.
2. Confirme su entrada con <Enter>. Se mostrará la siguienteposición de entrada.
3. Repita la entrada para las siguientes posiciones.
Una vez entrada la tercera cifra, se habilita el acceso a travésdel panel de control.
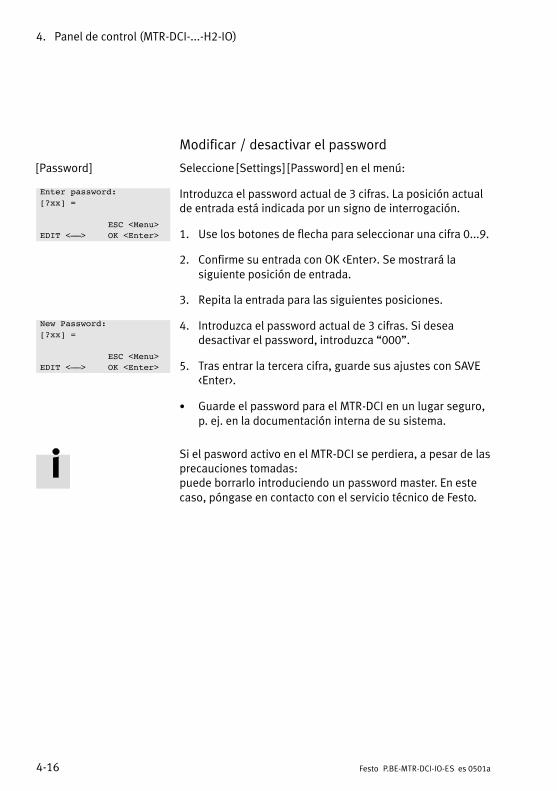
Enter password:[?xx] =
ESC <Menu>EDIT <��> OK <Enter>
New Password:[?xx] =
ESC <Menu>EDIT <��> OK <Enter>
4. Panel de control (MTR−DCI−...−H2−IO)
4−16 Festo P.BE−MTR−DCI−IO−ES es 0501a
Modificar / desactivar el password
[Password] Seleccione [Settings] [Password] en el menú:
Introduzca el password actual de 3 cifras. La posición actualde entrada está indicada por un signo de interrogación.
1. Use los botones de flecha para seleccionar una cifra 0...9.
2. Confirme su entrada con OK <Enter>. Se mostrará lasiguiente posición de entrada.
3. Repita la entrada para las siguientes posiciones.
4. Introduzca el password actual de 3 cifras. Si deseadesactivar el password, introduzca �000".
5. Tras entrar la tercera cifra, guarde sus ajustes con SAVE<Enter>.
· Guarde el password para el MTR−DCI en un lugar seguro,p. ej. en la documentación interna de su sistema.
Si el pasword activo en el MTR−DCI se perdiera, a pesar de lasprecauciones tomadas: puede borrarlo introduciendo un password master. En estecaso, póngase en contacto con el servicio técnico de Festo.
4. Panel de control (MTR−DCI−...−H2−IO)
4−17Festo P.BE−MTR−DCI−IO−ES es 0501a
4.2.5 Menú �Positioning"
Inicie una puesta en origen o recorrido de posicionado paraverificar los juegos de posiciones.
Por favor, observar· Antes de iniciar la puesta en origen, asegúrese de que:
� el sistema de posicionado se halla completamenteajustado, cableado y alimentado de tensión.
� la parametrización se ha completado.
· No inicie recorridos de posicionado hasta que el sistemade referencia haya sido definido por una puesta en ori�gen (homing).
AtenciónRiesgo de lesiones.
Durante todos los procedimientos de posicionado, elmotor gira o el eje conectado empieza a moverse.
· Asegúrese de que nadie pueda poner su mano en elmargen de posicionamiento de la masa móvil y de queno haya obstáculos en su recorrido.
Por favor, observarObserve que los juegos de posición con velocidad v = 0 oposiciones de destino inválidas (−> Error �TARGET POSI�TION OUT OF LIMIT) no pueden ser procesadas.
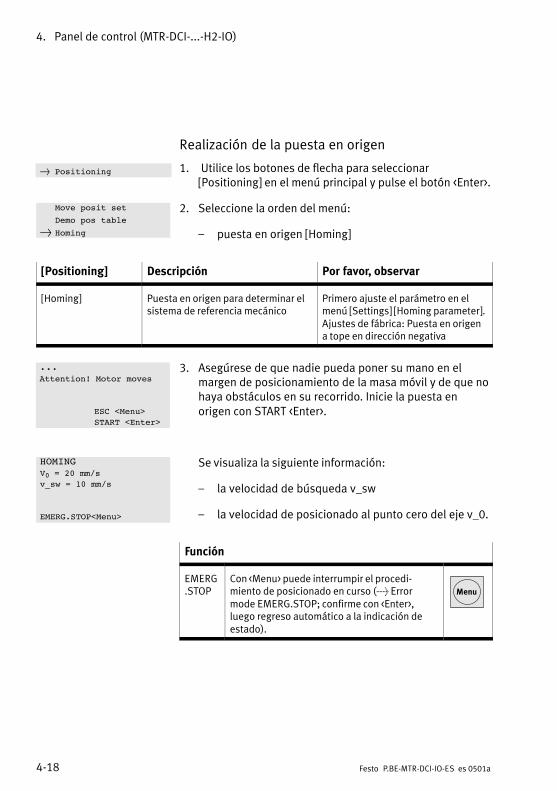
} Positioning
Move posit set
Demo pos table
} Homing
...Attention! Motor moves
ESC <Menu>START <Enter>
HOMINGV0 = 20 mm/sv_sw = 10 mm/s
EMERG.STOP<Menu>
4. Panel de control (MTR−DCI−...−H2−IO)
4−18 Festo P.BE−MTR−DCI−IO−ES es 0501a
Realización de la puesta en origen
1. Utilice los botones de flecha para seleccionar[Positioning] en el menú principal y pulse el botón <Enter>.
2. Seleccione la orden del menú:
� puesta en origen [Homing]
[Positioning] Descripción Por favor, observar
[Homing] Puesta en origen para determinar elsistema de referencia mecánico
Primero ajuste el parámetro en elmenú [Settings] [Homing parameter].Ajustes de fábrica: Puesta en origena tope en dirección negativa
3. Asegúrese de que nadie pueda poner su mano en elmargen de posicionamiento de la masa móvil y de que nohaya obstáculos en su recorrido. Inicie la puesta enorigen con START <Enter>.
Se visualiza la siguiente información:
� la velocidad de búsqueda v_sw
� la velocidad de posicionado al punto cero del eje v_0.
Función
EMERG.STOP
Con <Menu> puede interrumpir el procedi�miento de posicionado en curso (> Errormode EMERG.STOP; confirme con <Enter>,luego regreso automático a la indicación deestado).
Menu
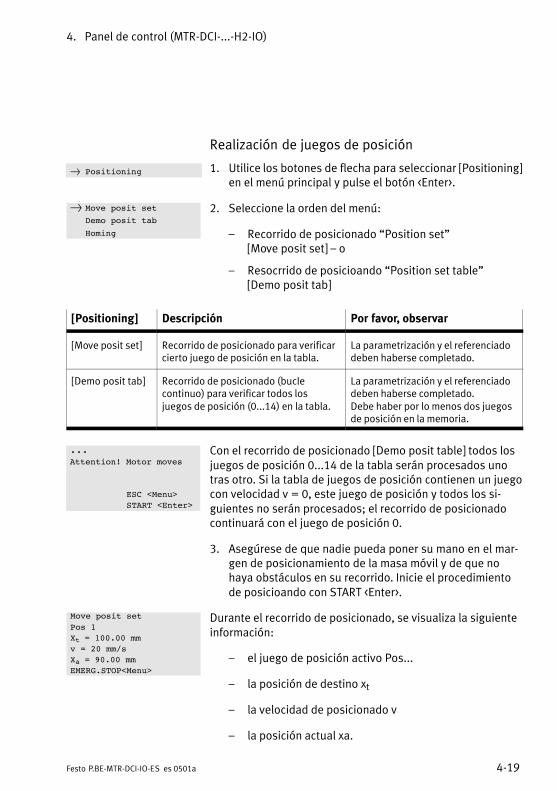
} Positioning
} Move posit set
Demo posit tab
Homing
...Attention! Motor moves
ESC <Menu>START <Enter>
Move posit setPos 1Xt = 100.00 mmv = 20 mm/sXa = 90.00 mmEMERG.STOP<Menu>
4. Panel de control (MTR−DCI−...−H2−IO)
4−19Festo P.BE−MTR−DCI−IO−ES es 0501a
Realización de juegos de posición
1. Utilice los botones de flecha para seleccionar [Positioning]en el menú principal y pulse el botón <Enter>.
2. Seleccione la orden del menú:
� Recorrido de posicionado �Position set" [Move posit set] � o
� Resocrrido de posicioando �Position set table" [Demo posit tab]
[Positioning] Descripción Por favor, observar
[Move posit set] Recorrido de posicionado para verificarcierto juego de posición en la tabla.
La parametrización y el referenciadodeben haberse completado.
[Demo posit tab] Recorrido de posicionado (buclecontinuo) para verificar todos losjuegos de posición (0...14) en la tabla.
La parametrización y el referenciadodeben haberse completado.Debe haber por lo menos dos juegosde posición en la memoria.
Con el recorrido de posicionado [Demo posit table] todos losjuegos de posición 0...14 de la tabla serán procesados unotras otro. Si la tabla de juegos de posición contienen un juegocon velocidad v = 0, este juego de posición y todos los si�guientes no serán procesados; el recorrido de posicionadocontinuará con el juego de posición 0.
3. Asegúrese de que nadie pueda poner su mano en el mar�gen de posicionamiento de la masa móvil y de que nohaya obstáculos en su recorrido. Inicie el procedimientode posicioando con START <Enter>.
Durante el recorrido de posicionado, se visualiza la siguienteinformación:
� el juego de posición activo Pos...
� la posición de destino xt
� la velocidad de posicionado v
� la posición actual xa.

4. Panel de control (MTR−DCI−...−H2−IO)
4−20 Festo P.BE−MTR−DCI−IO−ES es 0501a
Función
EMERG.STOP
Con <Menu> puede interrumpir el procedi�miento de posicionado en curso (> Errormode EMERG.STOP; confirme con <Enter>,luego regreso automático a la indicación deestado).
Menu
DEMOSTOP
Con <Enter> puede interrumpir el recorrido deposicionado �Position set table" [Demo postab]. El juego de posición actual será proce�sado antes de que el eje se detenga. El nuevoarranque se hará con el juego de posición 0.
Enter

Puesta a punto
5−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Capítulo 5
5. Puesta a punto
5−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
5. Puesta a punto 5−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Preparación para la puesta a punto 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Verifique la conexión a la red de alimentación 5−3 . . . . . . . . . . . . . . . .
5.1.2 Verifique el accionamiento 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.3 Instalación y puesta en marcha del FCT 5−4 . . . . . . . . . . . . . . . . . . . . . .
5.2 Procedimiento para la puesta a punto 5−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Puesta a punto con FCT 5−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.2 Puesta a punto con el panel de control (MTR−DCI−...−H2) 5−10 . . . . . . . .
5.3 Parametrización y referencia (MTR−DCI−...−H2) 5−12 . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Establecimiento del tipo de eje 5−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Ajuste de los parámetros de puesta en origen 5−12 . . . . . . . . . . . . . . . .
5.3.3 Realización de la puesta en origen 5−17 . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.4 Programación (por Teach) del punto cero del eje y de las posiciones finalespor software 5−20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Posicionado con juegos de posición (position sets) (MTR−DCI−...−H2) 5−22 . . . . .
5.4.1 Programación (por Teach) de los juegos de posición 5−23 . . . . . . . . . . .
5.4.2 Ciclo de prueba 5−25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Prueba de funcionamiento de las I/O 5−26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Instrucciones durante el funcionamiento 5−27 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Diagnosis e indicación de errores 5−31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.1 Posibilidades generales de diagnosis 5−31 . . . . . . . . . . . . . . . . . . . . . . .
5.7.2 Indicadores de estado LED 5−32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.3 Mensajes de fallo en el display (MTR−DCI−...−H2) 5−34 . . . . . . . . . . . . . . .
5. Puesta a punto
5−3Festo P.BE−MTR−DCI−IO−ES es 0501a
5.1 Preparación para la puesta a punto
5.1.1 Verifique la conexión a la red de alimentación
Por favor, observarDebe respetarse la tolerancia de la tensión de alimenta�ción. La tolerancia debe ser comprobada directamente enla conexión de la tensión de funcionamiento del MTR−DCI.
Los valores correctos pueden hallarse en el capítulo 3.2 y enlas especificaciones técnicas en el apéndice.
5.1.2 Verifique el accionamiento
· Antes poner a punto el servoaccionamiento, asegúrese deque:
� el espacio de trabajo es de tamaño suficiente para elfuncionamiento con la carga
� la carga no colisiona con el motor o el reductor del ejecuando éste se desplaza a la posición final
� el servoaccionamiento se halla dentro del margen deposicionamiento permitido cuando se pone en mar�cha.
· Tenga en cuenta las notas en las instrucciones de funcio�namiento del servoaccionamiento.
5. Puesta a punto
5−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.1.3 Instalación y puesta en marcha del FCT
El FCT se instala en su PC con un programa de instalación. ElPlugIn MTR−DCI se instala en su PC junto con el programa deinstalación del FCT.
Por favor, observarEl PlugIn MTR−DCI versión V01.00.00 soporta los siguien�tes grupos motor del tipo MTR−DCI−...IO.
� Versión de firmware a partir de V−DME 1.19
Verifique con versiones posteriores del MTR−DCI, si existeun PlugIn actualizado. Si es necesario, consulte con elservicio de Festo.
Por favor, observarSe necesitan derechos de administrador para instalar elFCT.
Puede instalar el FCT desde el CD ROM de la siguiente forma:
1. Cierre todos los programas.
2. Coloque el CD Festo Configuration Tool en su unidad deCD ROM. Si tiene activado Auto Run en su sistema, la ins�talación arrancará automáticamente y podrá omitir lospasos 3 y 4.
3. Seleccione [Ejecutar] en el menú de inicio.
4. Escriba D:\setup (Si es necesario, sustituya la D por laletra de su unidad de CD ROM).
5. Siga las instrucciones de la pantalla.
5. Puesta a punto
5−5Festo P.BE−MTR−DCI−IO−ES es 0501a
5.2 Procedimiento para la puesta a punto
PrecauciónPuede producirse fallos si intenta acceder a las funcionesoperativas y de control al mismo tiempo desde el FCT ydesde el panel de control.
· Asegúrese de que el FCT, el panel de control y el inter�face de control del MTR−DCI no se utilizan al mismotiempo.
Por favor, observarEn los siguientes casos, no está permitido acceder al MTR−DCI con la opción de escritura del FCT (p. ej. descarga deparámetros) o de control (p.�ej. con �Move manually" (Mo�ver manualmente) o cuando se ha iniciado la puesta enorigen):
� Cuando el MTR−DCI se halla realizando un movimientode posicionado o cuando se ha iniciado un movimientodurante el acceso (p. ej. a través del interface de controlo del panel de control).
� Cuando se realiza la parametrización o se controla elfuncionamiento en el MTR−DCI con el panel de control.
Por favor, observar lo siguiente:
· La conexión al dispositivo en el FCT, no debe ser acti�vada cuando el panel de control está siendo utilizadapara el control (�HMI control = on").
· El control con el panel de control (�HMI control = on")no debe ser activado cuando está activada la conexión aldispositivo en el FCT.
· El control por el FCT no debe ser activado mientras elaccionamiento se halla en movimiento o cuando se estárealizando el control a través de las I/Os.

5. Puesta a punto
5−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
Para la puesta a punto de un eje formado por un MTR−DCI yun actuador (p. ej. tipo DMES...), hay que configurar la com�posición mecánica (tipo de actuador) y hay que definir unsistema de referencia de las medidas (referenciado y coorde�nadas de referencia). Por medio del sistema de referencia demediciones, se definen todas las posiciones y puede hacerseel movimiento a ellas, p. ej. con un juego de posición a partirde una tabla de juegos de posición.
· Aplicar la tensión de funcionamiento al MTR−DCI. Cuandose enciende la tensión de alimentación, el MTR−DCI realizaautomáticamente una verificación interna.
AtenciónRiesgo de lesiones.Los fallos en la parametrización pueden causar lesiones alas personas o daños a los equipos. En los siguientes ca�sos es necesario realizar inmediatamente la puesta enorigen (homing) para que puedan establecerse correcta�mente las coordenadas de referencia y el área de trabajo.
� con la primera puesta en marcha
� cuando se cambie el método de referencia
� con el fallo LAST ACTUAL POSITION NOT SAVED (última posición actual no guardada)
� con un eje que no sea irreversible cada vez que sedesconecte.
· Verifique (si su actuador ha sido configurado en fábrica)los ajustes del menú [Diagnostic].
· Realice la parametrización y la puesta a punto con el pa�nel de control o el FCT, como se describe en los siguientescapítulos y en la ayuda del FCT/PlugIn.Las explicaciones de las coordenadas de referencia y elárea de trabajo pueden hallarse en el capítulo 1.1.2.
· Para completar la puesta a punto observe las instruccio�nes para el funcionamiento en la ayuda del FCT/PlugIn yen el capítulo 5.6

5. Puesta a punto
5−7Festo P.BE−MTR−DCI−IO−ES es 0501a
Por favor, observarPuede restablecer los ajustes predeterminados, si es nece�sario, borrando directamente la EEPROM a través del inter�face serie con el CI 20F1 (Data memory control) (véase elcapítulo 7). Con ello se perderán los ajustes específicos delusuario.
· Utilice órdenes del CI sólo si ya tiene experiencia en elService Data Objects.
· Si es necesario, consulte con el servicio de Festo.
5. Puesta a punto
5−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.2.1 Puesta a punto con FCT
Inicio del FCT
Para poner a punto el MTR−DCI con el FCT realice los siguien�tes pasos:
1. Conecte el MTR−DCI al PC por medio del interface RS232Observe aquí las instrucciones del capítulo 3.3.
2. Para iniciar el FCT haga un doble clic en el icono del FestoConfiguration Tool en el escritorioo bienabra el menú [Inicio] de Windows y seleccione la entrada[Festo Software] [Festo Configuration Tool].
3. Cree un proyecto en el FCT o abra un proyecto existente.Añada un dispositivo al proyecto con el PlugIn MTR−DCI.
4. Cree la conexión al dispositivo (conexión online) entre elPC y el MTR−DCI por medio de la barra de herramientasFCT. Aquí puede ser necesario tener los mismos nombres dedispositivo.
Control del dispositivo
Para que el FCT pueda controlar el MTR−DCI conectado, elinterface de control del MTR−DCI debe estar desactivado ydebe estar activada la habilitación del controlador. Entoncesel estado actual de la entrada ENABLE no tiene efecto. Accedaa la ventana �General output" registro �Operate" y activarbajo �Device control" primero en la caja de control �SeparateI/O" y luego la caja de control �Enable". Con ello el interfacede control del MTR−DCI se desactiva y se activa la habilitacióndel control del FCT (control enable).
5. Puesta a punto
5−9Festo P.BE−MTR−DCI−IO−ES es 0501a
Instrucciones sobre la puesta a punto yparametrización
Puede hallarse más información en la ayuda para el FCT conla orden [Help] [Contenido FCT general] p. ej.
� ayuda sobre el trabajo con proyectos y la adición de undispositivo al un proyecto.
� ayuda sobre la definición del sistema de referencia demediciones (referenciado y coordenadas de referencia).
El PlugIn MTR−DCI para el FCT soporta todos los pasosnecesarios para la puesta a punto de un MTR−DCI.
Con el PlugIn MTR−DCI para el FCT, las parametrizacionesnecesarias pueden realizarse offline, es decir, sin tener elMTR−DCI conectado al PC. Esto habilita la preparación de lapuesta a punto actual, p. ej. en la oficina de diseño cuando seplanea un nuevo sistema.
Puede hallarse más información en la ayuda del PlugIn:Orden [Help] [Contents of installed PlugIns] [Festo (nombredel fabricante)] [MTR−DCI (nombre el PlugIn)] p. ej.:
� para describir los diálogos del �Device MTR−DCI"
� para describir las etapas de trabajo para la puesta apunto
� para las funciones básicas: �Device connection" (Cone�xión del dispositivo), �Device names" (nombre del dispo�sitivo), �Device control" (control del dispositivo) y para la�Password protection" protección por palabra clave.
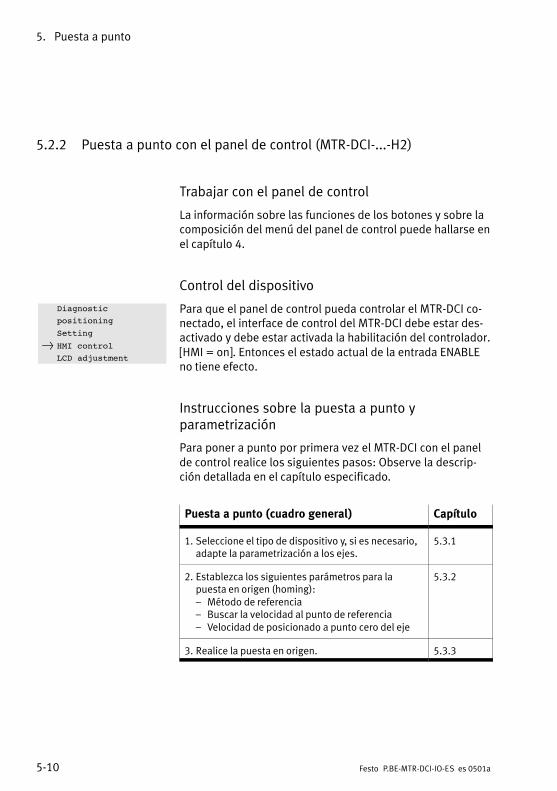
Diagnostic
positioning
Setting
} HMI control
LCD adjustment
5. Puesta a punto
5−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.2.2 Puesta a punto con el panel de control (MTR−DCI−...−H2)
Trabajar con el panel de control
La información sobre las funciones de los botones y sobre lacomposición del menú del panel de control puede hallarse enel capítulo 4.
Control del dispositivo
Para que el panel de control pueda controlar el MTR−DCI co�nectado, el interface de control del MTR−DCI debe estar des�activado y debe estar activada la habilitación del controlador.[HMI = on]. Entonces el estado actual de la entrada ENABLEno tiene efecto.
Instrucciones sobre la puesta a punto yparametrización
Para poner a punto por primera vez el MTR−DCI con el panelde control realice los siguientes pasos: Observe la descrip�ción detallada en el capítulo especificado.
Puesta a punto (cuadro general) Capítulo
1. Seleccione el tipo de dispositivo y, si es necesario,adapte la parametrización a los ejes.
5.3.1
2. Establezca los siguientes parámetros para lapuesta en origen (homing):� Método de referencia� Buscar la velocidad al punto de referencia� Velocidad de posicionado a punto cero del eje
5.3.2
3. Realice la puesta en origen. 5.3.3
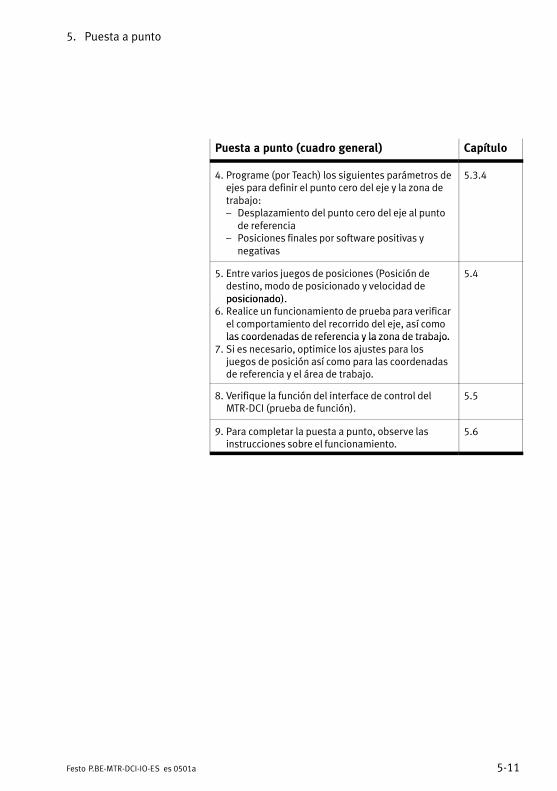
5. Puesta a punto
5−11Festo P.BE−MTR−DCI−IO−ES es 0501a
Puesta a punto (cuadro general) Capítulo
4. Programe (por Teach) los siguientes parámetros deejes para definir el punto cero del eje y la zona detrabajo:� Desplazamiento del punto cero del eje al punto
de referencia� Posiciones finales por software positivas y
negativas
5.3.4
5. Entre varios juegos de posiciones (Posición dedestino, modo de posicionado y velocidad deposicionado).
5.4
posicionado).6. Realice un funcionamiento de prueba para verificar
el comportamiento del recorrido del eje, así comolas coordenadas de referencia y la zona de trabajo.las coordenadas de referencia y la zona de trabajo.
7. Si es necesario, optimice los ajustes para losjuegos de posición así como para las coordenadasde referencia y el área de trabajo.
8. Verifique la función del interface de control delMTR−DCI (prueba de función).
5.5
9. Para completar la puesta a punto, observe lasinstrucciones sobre el funcionamiento.
5.6
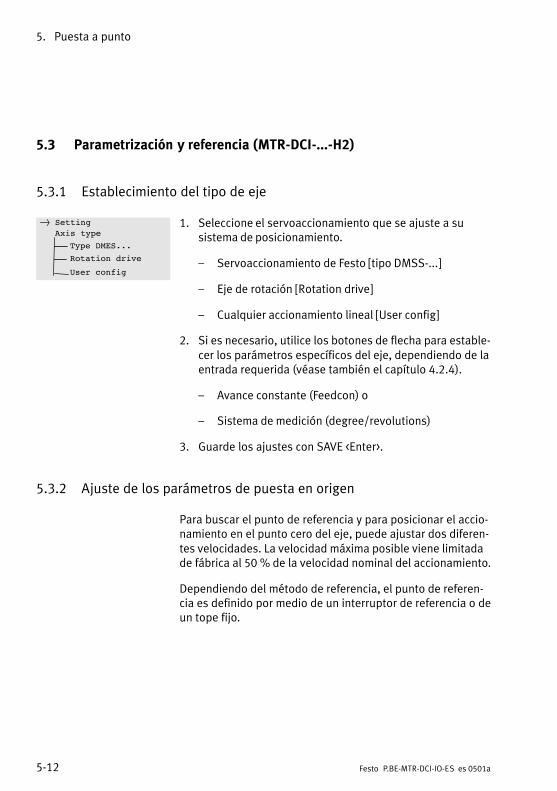
} SettingAxis type
Type DMES...
Rotation drive
User config
5. Puesta a punto
5−12 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.3 Parametrización y referencia (MTR−DCI−...−H2)
5.3.1 Establecimiento del tipo de eje
1. Seleccione el servoaccionamiento que se ajuste a susistema de posicionamiento.
� Servoaccionamiento de Festo [tipo DMSS−...]
� Eje de rotación [Rotation drive]
� Cualquier accionamiento lineal [User config]
2. Si es necesario, utilice los botones de flecha para estable�cer los parámetros específicos del eje, dependiendo de laentrada requerida (véase también el capítulo 4.2.4).
� Avance constante (Feedcon) o
� Sistema de medición (degree/revolutions)
3. Guarde los ajustes con SAVE <Enter>.
5.3.2 Ajuste de los parámetros de puesta en origen
Para buscar el punto de referencia y para posicionar el accio�namiento en el punto cero del eje, puede ajustar dos diferen�tes velocidades. La velocidad máxima posible viene limitadade fábrica al 50 % de la velocidad nominal del accionamiento.
Dependiendo del método de referencia, el punto de referen�cia es definido por medio de un interruptor de referencia o deun tope fijo.
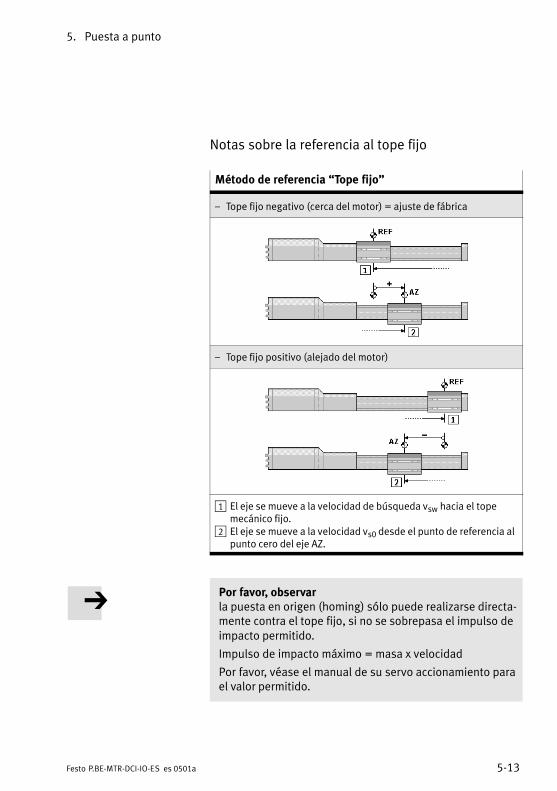
5. Puesta a punto
5−13Festo P.BE−MTR−DCI−IO−ES es 0501a
Notas sobre la referencia al tope fijo
Método de referencia �Tope fijo"
� Tope fijo negativo (cerca del motor) = ajuste de fábrica
� Tope fijo positivo (alejado del motor)
1 El eje se mueve a la velocidad de búsqueda vsw hacia el topemecánico fijo.
2 El eje se mueve a la velocidad vs0 desde el punto de referencia alpunto cero del eje AZ.
Por favor, observarla puesta en origen (homing) sólo puede realizarse directa�mente contra el tope fijo, si no se sobrepasa el impulso deimpacto permitido.
Impulso de impacto máximo = masa x velocidad
Por favor, véase el manual de su servo accionamiento parael valor permitido.
5. Puesta a punto
5−14 Festo P.BE−MTR−DCI−IO−ES es 0501a
PrecauciónDaños a componentes.El MTR−DCI se mueve hacia el tope durante la puesta enorigen a 1,5 veces el par nominal del motor (150 % de lacorriente nominal).
· Limite la corriente máxima durante la puesta en origenpor medio de:
� Software FCT (véase la ayuda para el PlugIn MTR−DCI)
� Orden CI �Object 6073 Max. current" (ver apéndiceB.1).
Observe que la limitación de la corriente también limita lavelocidad máxima posible y que por lo tanto no puedenconseguirse velocidad nominales (más altas).
PrecauciónDaños a componentes.
Durante el funcionamiento no está permitido desplazarse alas posiciones mecánicas finales (topes). Si se hace unmovimiento a las posiciones finales con una carga elevada,las posiciones finales pueden bloquearse.
· Establezca el desplazamiento (offset) del punto cero � 0.
· Limite el margen de posicionado definiendo unas posi�ciones finales por software durante la puesta a punto(véase capítulo 1.1.2).
· Especifique las posiciones de destino sólo dentro delmargen de posicionado permitido.
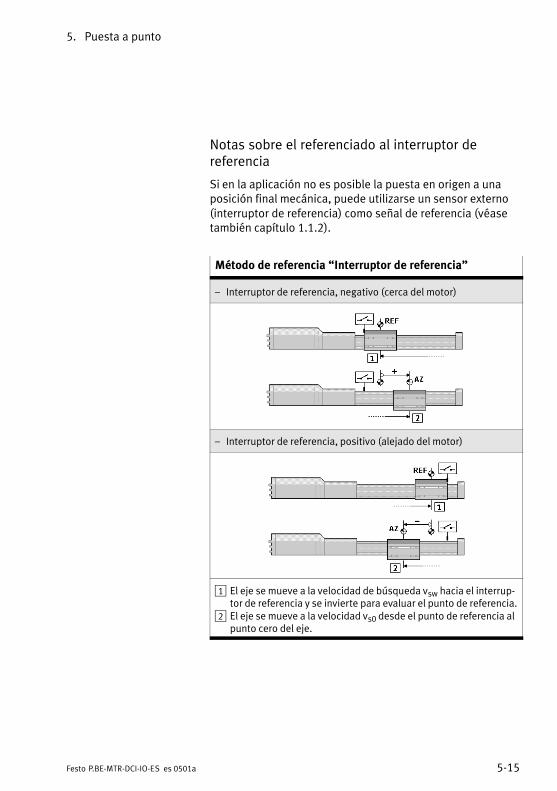
5. Puesta a punto
5−15Festo P.BE−MTR−DCI−IO−ES es 0501a
Notas sobre el referenciado al interruptor dereferencia
Si en la aplicación no es posible la puesta en origen a unaposición final mecánica, puede utilizarse un sensor externo(interruptor de referencia) como señal de referencia (véasetambién capítulo 1.1.2).
Método de referencia �Interruptor de referencia"
� Interruptor de referencia, negativo (cerca del motor)
� Interruptor de referencia, positivo (alejado del motor)
1 El eje se mueve a la velocidad de búsqueda vsw hacia el interrup�tor de referencia y se invierte para evaluar el punto de referencia.
2 El eje se mueve a la velocidad vs0 desde el punto de referencia alpunto cero del eje.
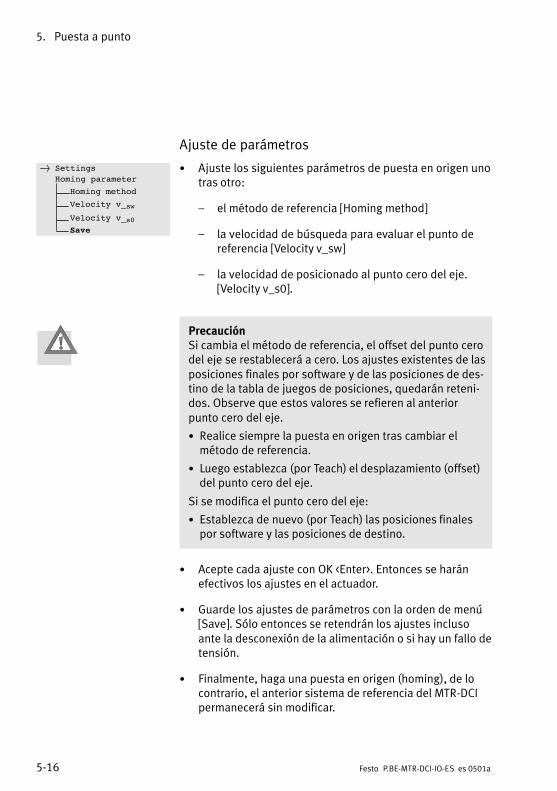
} SettingsHoming parameter
Homing method
Velocity v_sw
Velocity v_s0Save
5. Puesta a punto
5−16 Festo P.BE−MTR−DCI−IO−ES es 0501a
Ajuste de parámetros
· Ajuste los siguientes parámetros de puesta en origen unotras otro:
� el método de referencia [Homing method]
� la velocidad de búsqueda para evaluar el punto dereferencia [Velocity v_sw]
� la velocidad de posicionado al punto cero del eje. [Velocity v_s0].
PrecauciónSi cambia el método de referencia, el offset del punto cerodel eje se restablecerá a cero. Los ajustes existentes de lasposiciones finales por software y de las posiciones de des�tino de la tabla de juegos de posiciones, quedarán reteni�dos. Observe que estos valores se refieren al anteriorpunto cero del eje.
· Realice siempre la puesta en origen tras cambiar elmétodo de referencia.
· Luego establezca (por Teach) el desplazamiento (offset)del punto cero del eje.
Si se modifica el punto cero del eje:
· Establezca de nuevo (por Teach) las posiciones finalespor software y las posiciones de destino.
· Acepte cada ajuste con OK <Enter>. Entonces se haránefectivos los ajustes en el actuador.
· Guarde los ajustes de parámetros con la orden de menú[Save]. Sólo entonces se retendrán los ajustes inclusoante la desconexión de la alimentación o si hay un fallo detensión.
· Finalmente, haga una puesta en origen (homing), de locontrario, el anterior sistema de referencia del MTR−DCIpermanecerá sin modificar.
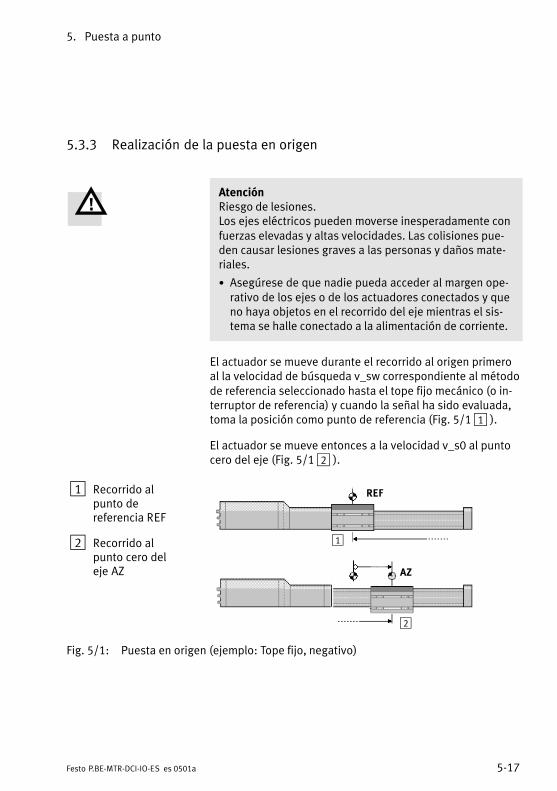
5. Puesta a punto
5−17Festo P.BE−MTR−DCI−IO−ES es 0501a
5.3.3 Realización de la puesta en origen
AtenciónRiesgo de lesiones.Los ejes eléctricos pueden moverse inesperadamente confuerzas elevadas y altas velocidades. Las colisiones pue�den causar lesiones graves a las personas y daños mate�riales.
· Asegúrese de que nadie pueda acceder al margen ope�rativo de los ejes o de los actuadores conectados y queno haya objetos en el recorrido del eje mientras el sis�tema se halle conectado a la alimentación de corriente.
El actuador se mueve durante el recorrido al origen primeroal la velocidad de búsqueda v_sw correspondiente al métodode referencia seleccionado hasta el tope fijo mecánico (o in�terruptor de referencia) y cuando la señal ha sido evaluada,toma la posición como punto de referencia (Fig.�5/1 1�).
El actuador se mueve entonces a la velocidad v_s0 al puntocero del eje (Fig.�5/1 2�).
1 Recorrido alpunto dereferencia REF
2 Recorrido alpunto cero deleje AZ
REF
AZ
2
1
Fig.�5/1: Puesta en origen (ejemplo: Tope fijo, negativo)
5. Puesta a punto
5−18 Festo P.BE−MTR−DCI−IO−ES es 0501a
Tras una puesta en origen correcta, el actuador permaneceen el punto cero del eje. Con la primera puesta a punto aotras un cambio del método de referencia, el desplazamiento(offset) del punto cero del eje es = 0; entonces el actuador sedetiene tras la puesta en origen en el punto de referencia(=�punto cero del eje).
Inicio de la puesta en origen
Para la puesta en origen, deben cumplirse las siguientescondiciones:
� El eje debe hallarse completamente ajustado, cableado yalimentado de tensión.
� El MTR−DCI debe estar completamente parametrizado.
Por favor, observarCuando realice la puesta en origen observe que:
� el actuador deben hallarse en el margen de posiciona�miento permitido.
� el actuador se mueve en la dirección de búsqueda co�rrespondiente al método de referencia seleccionado y alprincipio debe hallarse frente al tope o interruptor dereferencia.
1. Posicione el actuador en el modo Teach, de forma que alinicio en la dirección de búsqueda quede en frente deltope o interruptor de referencia.
· Seleccione p. ej. [Settings] [Position set] [Position](véase también el capítulo 5.4.1).
· Mueva el actuador manualmente a la posición des�eada con los botones de flecha.
· Interrumpa el procedimiento con ESC <menu>, paraque la posición no sea incluida en la tabla de juegosde posiciones.
5. Puesta a punto
5−19Festo P.BE−MTR−DCI−IO−ES es 0501a
2. Seleccione [Positioning] [Homing].
3. Inicie la puesta en origen con START <Enter>.
Interrupción el la puesta en origen
Si es necesario, la puesta en origen puede interrumpirse conla tecla <Menu> (EMERG STOP). Si se interrumpe la puesta enorigen, el display mostrará el mensaje de fallo HOMINGERROR.
Por favor, observarSi no se encuentra una señal de referencia durante el mé�todo de referencia �Interruptor de referencia", el MTR−DCIse detendrá antes de que el actuador alcance un tope fijoy mostrará un error (HOMING ERROR).
La puesta en origen debe repetirse una vez que se hayaeliminado el mensaje de error.
· Elimine el mensaje de error con <Enter>.
· Si es necesario, verifique la función de los detectores dereferencia.
· Verifique los ajustes de los parámetros.
· Posicione el actuador en el modo Teach, de forma que alinicio en la dirección de búsqueda quede en frente deltope o interruptor de referencia.
· Repita la puesta en origen.
} Positioning
Demo posit tab
Move posit set
Homing
5. Puesta a punto
5−20 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.3.4 Programación (por Teach) del punto cero del eje y de las posicionesfinales por software
Programación (por Teach) del punto cero del eje y de lasposiciones finales por software:
� El eje debe hallarse completamente ajustado, cableado yalimentado de tensión.
� El MTR−DCI debe estar completamente parametrizado.
� La puesta en origen se realizó correctamente.
Por favor, observarCon referencia al tope, ajuste el desplazamiento (offset)del punto cero del eje � 0. Con ello evitará el movimiento alas posicione finales mecánicas durante el funcionamiento.
Programe (por Teach) el punto cero del eje:
1. Seleccione [Settings] [Axis parameter] [Zero point].
2. Mueva el actuador manualmente al punto cero del ejedeseado con los botones de flecha.
3. Acepte la posición alcanzada con OK <Enter>. Entonces seharán efectivos los ajustes en el actuador. La posiciónactual xa se convierte en el punto cero del eje (xa = 0).
Por favor, observarSi se modifica el punto cero del eje:
Verifique los ajustes existentes de las posiciones finalespor software y de las posiciones de destino en la tabla deposiciones. Observe que estos valores se refieren al ante�rior punto cero del eje.
· Establezca de nuevo (por Teach) las posiciones finalespor software y las posiciones de destino.
} SettingsAxis parameter
Zero point
Abs.min.pos
Abs.max.pos
Save
5. Puesta a punto
5−21Festo P.BE−MTR−DCI−IO−ES es 0501a
Establezca las posiciones finales negativa y positiva porsoftware:
1. Seleccione [Settings] [Axis parameter] [Abs.min.pos] or[Abs.max.pos].
2. Mueva el actuador manualmente con los botones deflecha.
3. Acepte la posición alcanzada con OK <Enter>. Entonces seharán efectivos los ajustes en el actuador.
4. Guarde los parámetros ajustados con [Save]. Sólo enton�ces se retendrán los ajustes incluso ante la desconexiónde la alimentación o si hay un fallo de tensión.
5. Puesta a punto
5−22 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.4 Posicionado con juegos de posición (position sets) (MTR−DCI−...−H2)
Deben cumplirse las siguientes condiciones:
� El eje debe hallarse completamente ajustado, cableado yalimentado de tensión.
� El MTR−DCI debe estar completamente parametrizado.
� La puesta en origen se realizó correctamente.
� El punto cero del eje y las posiciones finales por softwareestán correctamente establecidas.
Por favor, observarObserve que los juegos de posición con velocidad v = 0 oposiciones de destino inválidas (−> Error �TARGET POSITIONOUT OF LIMIT) no pueden ser procesadas.
· Tras una correcta puesta en origen, realice un funciona�miento de prueba, si es necesario, con una carga de tra�bajo (ver capítulo 5.4.2).
· Si es necesario, optimice los ajustes para los juegos deposición así como para las coordenadas de referencia y elárea de trabajo (ver capítulo 5.3).
· Tras un funcionamiento de prueba correcto, se puedenprogramar (por Teach) en la tabla de juegos de posicionespara qué movimiento debe hacerse (véase el capítulo5.4.1).
AtenciónDurante el procedimiento Teach, el motor gira o el ejeconectado empieza a moverse.
· Asegúrese de que nadie pueda poner su mano en elmargen de posicionamiento de la masa móvil y de queno haya obstáculos en su recorrido.
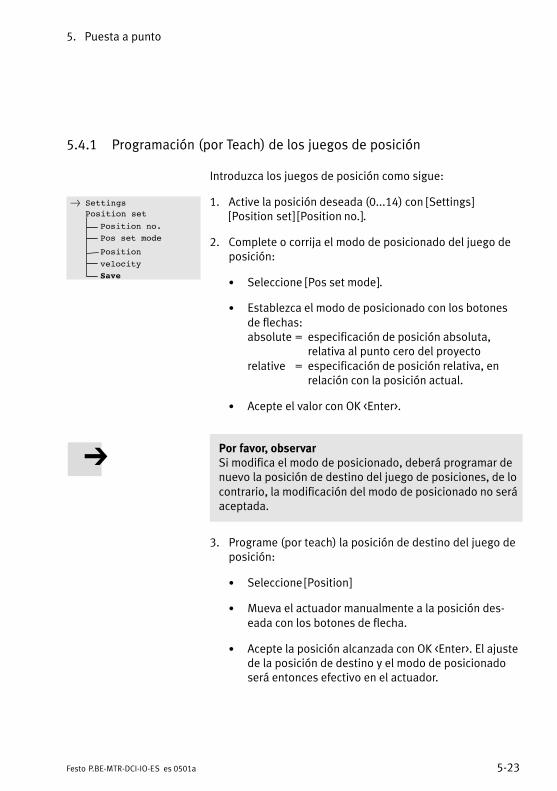
5. Puesta a punto
5−23Festo P.BE−MTR−DCI−IO−ES es 0501a
5.4.1 Programación (por Teach) de los juegos de posición
Introduzca los juegos de posición como sigue:
1. Active la posición deseada (0...14) con [Settings][Position�set] [Position no.].
2. Complete o corrija el modo de posicionado del juego deposición:
· Seleccione [Pos set mode].
· Establezca el modo de posicionado con los botonesde flechas: absolute = especificación de posición absoluta,
relativa al punto cero del proyecto relative = especificación de posición relativa, en
relación con la posición actual.
· Acepte el valor con OK <Enter>.
Por favor, observarSi modifica el modo de posicionado, deberá programar denuevo la posición de destino del juego de posiciones, de locontrario, la modificación del modo de posicionado no seráaceptada.
3. Programe (por teach) la posición de destino del juego deposición:
· Seleccione [Position]
· Mueva el actuador manualmente a la posición des�eada con los botones de flecha.
· Acepte la posición alcanzada con OK <Enter>. El ajustede la posición de destino y el modo de posicionadoserá entonces efectivo en el actuador.
} SettingsPosition set
Position no.
Pos set mode
Position
velocity
Save
5. Puesta a punto
5−24 Festo P.BE−MTR−DCI−IO−ES es 0501a
4. Complete o corrija la velocidad.
· Seleccione [Position]
· Establezca la velocidad nominal con los botones deflechas:
· Acepte el ajuste con OK <Enter>. Entonces se haránefectivos los ajustes en el actuador.
5. Guarde el juego de posición con [Save]. Sólo entonces seretendrán los ajustes incluso ante la desconexión de laalimentación o si hay un fallo de tensión.
6. Introduzca el siguiente juego de posición.
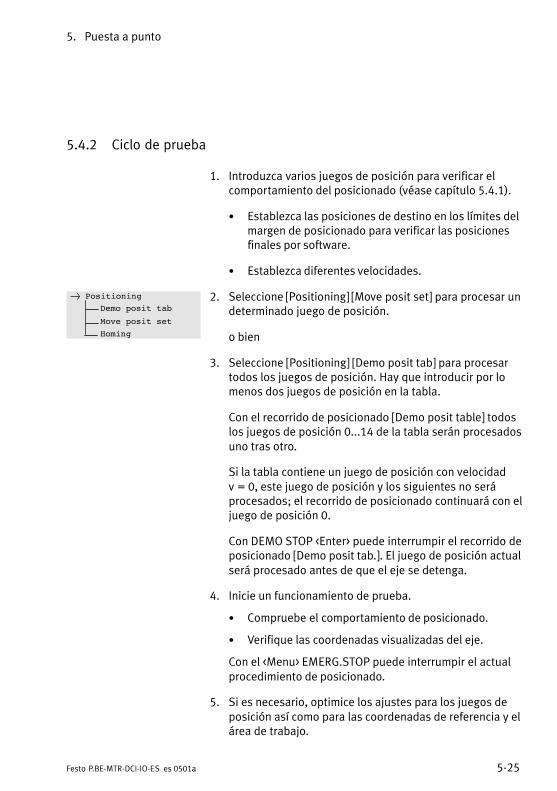
5. Puesta a punto
5−25Festo P.BE−MTR−DCI−IO−ES es 0501a
5.4.2 Ciclo de prueba
1. Introduzca varios juegos de posición para verificar elcomportamiento del posicionado (véase capítulo 5.4.1).
· Establezca las posiciones de destino en los límites delmargen de posicionado para verificar las posicionesfinales por software.
· Establezca diferentes velocidades.
2. Seleccione [Positioning] [Move posit set] para procesar undeterminado juego de posición.
o bien
3. Seleccione [Positioning] [Demo posit tab] para procesartodos los juegos de posición. Hay que introducir por lomenos dos juegos de posición en la tabla.
Con el recorrido de posicionado [Demo posit table] todoslos juegos de posición 0...14 de la tabla serán procesadosuno tras otro.
Si la tabla contiene un juego de posición con velocidadv�= 0, este juego de posición y los siguientes no seráprocesados; el recorrido de posicionado continuará con eljuego de posición 0.
Con DEMO STOP <Enter> puede interrumpir el recorrido deposicionado [Demo posit tab.]. El juego de posición actualserá procesado antes de que el eje se detenga.
4. Inicie un funcionamiento de prueba.
· Compruebe el comportamiento de posicionado.
· Verifique las coordenadas visualizadas del eje.
Con el <Menu> EMERG.STOP puede interrumpir el actualprocedimiento de posicionado.
5. Si es necesario, optimice los ajustes para los juegos deposición así como para las coordenadas de referencia y elárea de trabajo.
} Positioning
Demo posit tab
Move posit set
Homing
5. Puesta a punto
5−26 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.5 Prueba de funcionamiento de las I/O
AtenciónRiesgo de lesiones. Los fallos en la parametrización pue�den causar lesiones a las personas o daños a los equipos.
· Ponga en marcha el control sólo si el sistema de ejesestá correctamente instalado y parametrizado.
Para controlar el MTR−DCI a través del interface de control,debe desactivar el control manual del dispositivo:
� a través del panel de contro, del MTR−DCI con la orden demenú [HMI control] (HMI = off).
� con FCT bajo �Device control" en la ventana �Generaloutput", (FCT = off).
Para verificar la configuración y el ajuste del eje, introduzcaun sencillo programa de prueba o simule el control activandodirectamente las entradas.
· Véase la descripción de la función del interface de controlen el capítulo 6.2.
· Proporcione las entradas al sistema necesarias en elMTR−DCI. Debe haber una señal 1 en la entrada ENABLE(control y etapa final de potencia habilitados)
· Tenga en cuenta también las señales de salida que sonsalidas. Habrá una señal 1 en la salida READY (disponibili�dad para funcionar) si el control y la etapa final de poten�cia están habilitados y si no se ha reconocido ningún fallo.
· Programa o ejecute la puesta en origen así como algunosmovimientos de posicionado.
· Compruebe el comportamiento de posicionado.
5. Puesta a punto
5−27Festo P.BE−MTR−DCI−IO−ES es 0501a
5.6 Instrucciones durante el funcionamiento
Tenga en cuenta las siguientes instrucciones y recomendacio�nes cuando programe sistemas de posicionado con ejes eléc�tricos:
Protección con password
La protección por medio de un password no está activada defábrica. Para evitar la sobreescritura o modificación no autori�zada o involuntaria de parámetros del dispositivo, todas lasfunciones de descarga y control pueden ser bloqueadas.
· Recomendación:Proteja los ajustes de los ejes contra modificaciones nodeseadas con una clave de acceso (password):
� Protección por password del FCT (8 caracteres, véasela ayuda del PlugIn MTR−DCI)
� Protección por password del HMI con elMTR−DCI−...−H2 (3 caracteres, véase el capítulo 4.2.4)
Comportamiento en el arranque y referencia
Cuando el dispositivo se desconecta, la posición actual nor�malmente es guardada y esta posición guardada es leída denuevo como posición actual cuando el dispositivo es conec�tado de nuevo. Con ejes irreversibles (auto−bloqueo) la rela�ción de la posición actual del eje con el punto cero del eje esretenida (posicionamiento casi absoluto). No es necesariauna nueva puesta en origen (homing).
5. Puesta a punto
5−28 Festo P.BE−MTR−DCI−IO−ES es 0501a
AtenciónRiesgo de lesiones.Los fallos en la parametrización pueden causar lesiones alas personas o daños a los equipos. En los siguientes ca�sos es necesario realizar inmediatamente la puesta enorigen (homing) para que puedan establecerse correcta�mente las coordenadas de referencia y el área de trabajo.
� con la primera puesta en marcha
� cuando se cambie el método de referencia
� con el fallo LAST ACTUAL POSITION NOT SAVED (últimaposición actual no guardada)
� con un eje que no sea irreversible cada vez que sedesconecte.
Por favor, observarCuando el acoplamiento o el elemento de embragado en elcuerpo del acoplamiento se afloja, el motor puede girarsobre su eje longitudinal. Con ello se perderá la posiciónde referencia. Entonces debe hacerse a toda costa lapuesta en origen, incluso con ejes irreversibles.
Por favor, observarAsegúrese de que:
� el eje queda dentro del margen de posicionamiento per�mitido cuando se conecta y antes de iniciar la puesta enorigen.
� la puesta en origen se realiza cuando el control de nivelsuperior o control del motor se desconecta o, si es apli�cable, tras fallos.
5. Puesta a punto
5−29Festo P.BE−MTR−DCI−IO−ES es 0501a
Conexión del dispositivo
PrecauciónEl interface RS232 no está eléctricamente aislado. No estáprevisto para una conexión permanente a sistemas PC nicomo interface de control.
· Utilice la conexión sólo para parametrización ydiagnosis.
Control en funcionamiento
AtenciónRiesgo de lesiones.
Los fallos en la parametrización pueden causar lesiones laspersonas y daños a la propiedad si el control se habilitacon una señal 1 en la entrada ENABLE.
· Habilite el control sólo si el sistema de ejes está correc�tamente instalado y parametrizado.
PrecauciónObserve las especificaciones del fabricante para las condi�ciones de funcionamiento permitidas de los motores yaccionamientos utilizados, p. ej. respecto a las velocidadespermitidas.
PrecauciónDaños a componentes.El movimiento a las posiciones finales mecánicas no estápermitido durante el funcionamiento. Si se hace un movi�miento a las posiciones finales con una carga elevada, lasposiciones finales pueden bloquearse.
5. Puesta a punto
5−30 Festo P.BE−MTR−DCI−IO−ES es 0501a
Por favor, observarTenga en cuenta las funciones implementadas en el marcodel concepto de PARO DE EMERGENCIA correspondienteen los programas de control.
Cuidados y mantenimiento
Los grupos motor no requieren mantenimiento durante suvida útil especificada. Siga las instrucciones de manteni�miento de los componentes utilizados.
5. Puesta a punto
5−31Festo P.BE−MTR−DCI−IO−ES es 0501a
5.7 Diagnosis e indicación de errores
5.7.1 Posibilidades generales de diagnosis
El MTR−DCI ofrece las siguientes posibilidades de diagnosis ytratamiento de errores:
� Los LEDs indican la disponibilidad de funcionamiento,estado del posicionamiento y fallos.
� Las salidas del interface de control del MTR−DCI−...IO:
� READY indica la disponibilidad para funcionar.
� MOTION COMPLETE indica si se ha completado unatarea de posicionado.
� El panel de control del MTR−DCI−...−H2−IO:
� El display LD muestra datos de diagnosis, mensajesde error, el modo de funcionamiento, el actual juegode posición, posiciones actual y de destino, así comola velocidad.
� El FCT (con conexión del dispositivo activa):
� Visualización del juego de posición activo, posicionesactual y de destino, así como velocidad.
� Muestra el modo de funcionamiento, salidas especia�les y estados operativos, así como los mensajes deerror del MTR−DCI conectado.
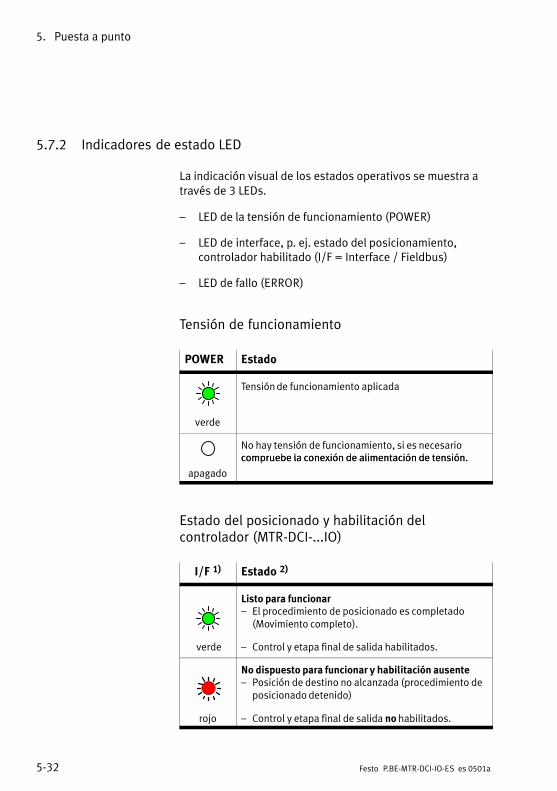
5. Puesta a punto
5−32 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.7.2 Indicadores de estado LED
La indicación visual de los estados operativos se muestra através de 3 LEDs.
� LED de la tensión de funcionamiento (POWER)
� LED de interface, p. ej. estado del posicionamiento,controlador habilitado (I/F = Interface / Fieldbus)
� LED de fallo (ERROR)
Tensión de funcionamiento
POWER Estado
Tensión de funcionamiento aplicada
verde
No hay tensión de funcionamiento, si es necesariocompruebe la conexión de alimentación de tensión.
apagado
compruebe la conexión de alimentación de tensión.
Estado del posicionado y habilitación delcontrolador (MTR−DCI−...IO)
I/F 1) Estado 2)
Listo para funcionar� El procedimiento de posicionado es completado
(Movimiento completo).
verde � Control y etapa final de salida habilitados.
No dispuesto para funcionar y habilitación ausente� Posición de destino no alcanzada (procedimiento de
posicionado detenido)
rojo � Control y etapa final de salida no habilitados.
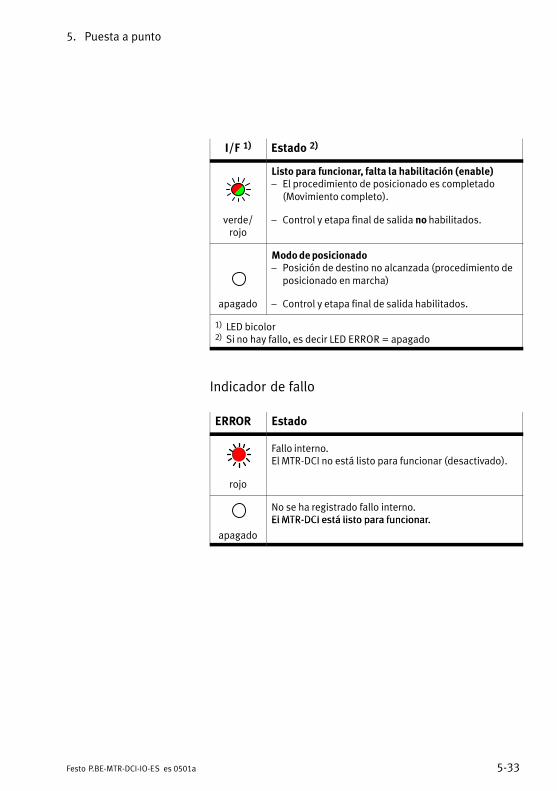
5. Puesta a punto
5−33Festo P.BE−MTR−DCI−IO−ES es 0501a
Estado 2)I/F 1)
Listo para funcionar, falta la habilitación (enable)� El procedimiento de posicionado es completado
(Movimiento completo).
verde/rojo
� Control y etapa final de salida no habilitados.
Modo de posicionado� Posición de destino no alcanzada (procedimiento de
posicionado en marcha)
apagado � Control y etapa final de salida habilitados.
1) LED bicolor2) Si no hay fallo, es decir LED ERROR = apagado
Indicador de fallo
ERROR Estado
Fallo interno.El MTR−DCI no está listo para funcionar (desactivado).
rojo
No se ha registrado fallo interno.El MTR−DCI está listo para funcionar.
apagado
El MTR−DCI está listo para funcionar.
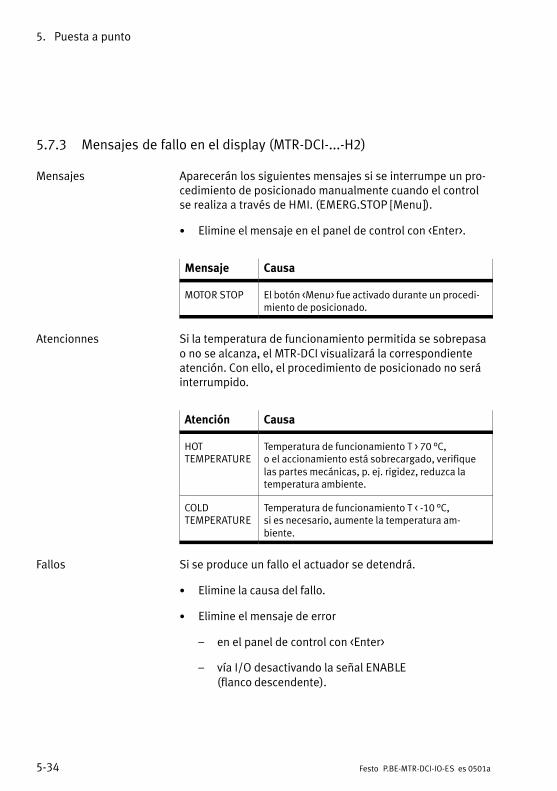
5. Puesta a punto
5−34 Festo P.BE−MTR−DCI−IO−ES es 0501a
5.7.3 Mensajes de fallo en el display (MTR−DCI−...−H2)
Mensajes Aparecerán los siguientes mensajes si se interrumpe un pro�cedimiento de posicionado manualmente cuando el controlse realiza a través de HMI. (EMERG.STOP [Menu]).
· Elimine el mensaje en el panel de control con <Enter>.
Mensaje Causa
MOTOR STOP El botón <Menu> fue activado durante un procedi�miento de posicionado.
Atencionnes Si la temperatura de funcionamiento permitida se sobrepasao no se alcanza, el MTR−DCI visualizará la correspondienteatención. Con ello, el procedimiento de posicionado no seráinterrumpido.
Atención Causa
HOTTEMPERATURE
Temperatura de funcionamiento T > 70 °C,o el accionamiento está sobrecargado, verifiquelas partes mecánicas, p. ej. rigidez, reduzca latemperatura ambiente.
COLDTEMPERATURE
Temperatura de funcionamiento T < −10 °C,si es necesario, aumente la temperatura am�biente.
Fallos Si se produce un fallo el actuador se detendrá.
· Elimine la causa del fallo.
· Elimine el mensaje de error
� en el panel de control con <Enter>
� vía I/O desactivando la señal ENABLE (flanco descendente).
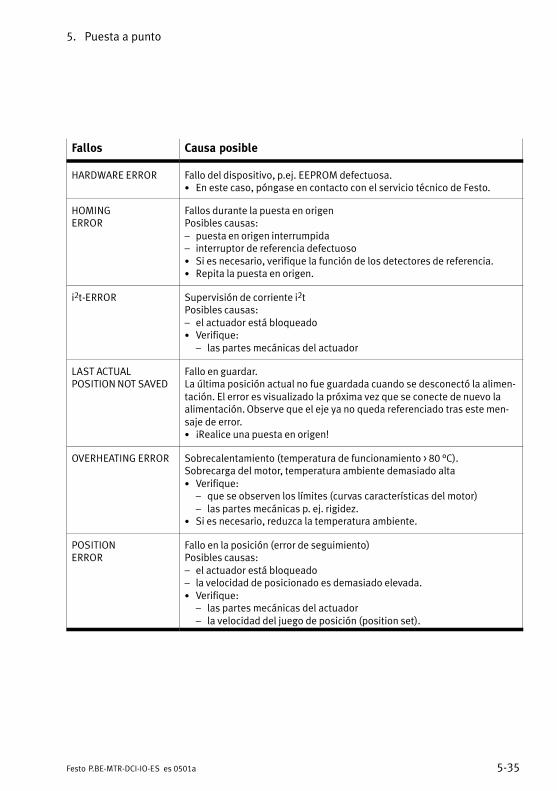
5. Puesta a punto
5−35Festo P.BE−MTR−DCI−IO−ES es 0501a
Fallos Causa posible
HARDWARE ERROR Fallo del dispositivo, p.ej. EEPROM defectuosa.· En este caso, póngase en contacto con el servicio técnico de Festo.
HOMINGERROR
Fallos durante la puesta en origenPosibles causas:� puesta en origen interrumpida� interruptor de referencia defectuoso· Si es necesario, verifique la función de los detectores de referencia.· Repita la puesta en origen.
i2t−ERROR Supervisión de corriente i2tPosibles causas:� el actuador está bloqueado· Verifique:
� las partes mecánicas del actuador
LAST ACTUALPOSITION NOT SAVED
Fallo en guardar.La última posición actual no fue guardada cuando se desconectó la alimen�tación. El error es visualizado la próxima vez que se conecte de nuevo laalimentación. Observe que el eje ya no queda referenciado tras este men�saje de error.· ¡Realice una puesta en origen!
OVERHEATING ERROR Sobrecalentamiento (temperatura de funcionamiento > 80 °C).Sobrecarga del motor, temperatura ambiente demasiado alta· Verifique:
� que se observen los límites (curvas características del motor)� las partes mecánicas p. ej. rigidez.
· Si es necesario, reduzca la temperatura ambiente.
POSITIONERROR
Fallo en la posición (error de seguimiento)Posibles causas:� el actuador está bloqueado� la velocidad de posicionado es demasiado elevada.· Verifique:
� las partes mecánicas del actuador� la velocidad del juego de posición (position set).
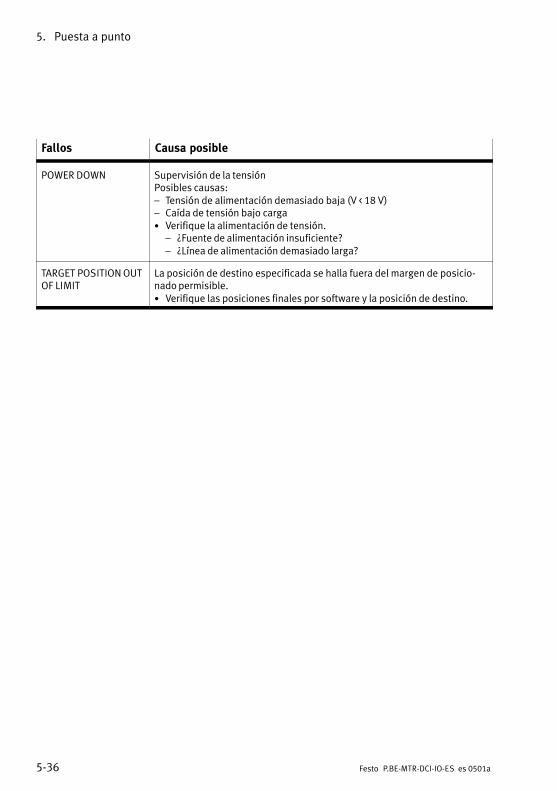
5. Puesta a punto
5−36 Festo P.BE−MTR−DCI−IO−ES es 0501a
Fallos Causa posible
POWER DOWN Supervisión de la tensiónPosibles causas:� Tensión de alimentación demasiado baja (V < 18 V)� Caída de tensión bajo carga· Verifique la alimentación de tensión.
� ¿Fuente de alimentación insuficiente?� ¿Línea de alimentación demasiado larga?
TARGET POSITION OUTOF LIMIT
La posición de destino especificada se halla fuera del margen de posicio�nado permisible.· Verifique las posiciones finales por software y la posición de destino.
Comunicación con control de nivel superior
6−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Capítulo 6
6. Comunicación con control de nivel superior
6−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
6. Comunicación con control de nivel superior 6−1 . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Conexión del interface I/O 6−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Descripción de las I/Os 6−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Descripción de la función (diagrama de pulsos−tiempo) 6−8 . . . . . . . . . . . . . . . .
6.4 Especificación de I/O 6−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6. Comunicación con control de nivel superior
6−3Festo P.BE−MTR−DCI−IO−ES es 0501a
6.1 Conexión del interface I/O
PrecauciónLos cables de señales de I/O largos reducen la inmunidada interferencias.
· No sobrepasar la longitud máxima de cable de señal deI/O permitida de 30 m.
AtenciónRiesgo de lesiones. Los fallos en la parametrización pue�den causar lesiones a las personas o daños a los equipos.
· Habilite el control sólo si el sistema de ejes está correc�tamente instalado y parametrizado.
· Deberá realizar la puesta en origen en los siguientescasos (juego de posición 15):
� con la primera puesta en marcha
� cuando se cambie el método de referencia
� con la atención LAST ACTUAL POSITION NOT SAVED(última posición actual no guardada)
� con un eje que no sea irreversible cada vez que sedesconecte.
USe el cable de control KES−MC−1−SUB−9 para conectar elMTR−DCI a un control de nivel superior (PLC).
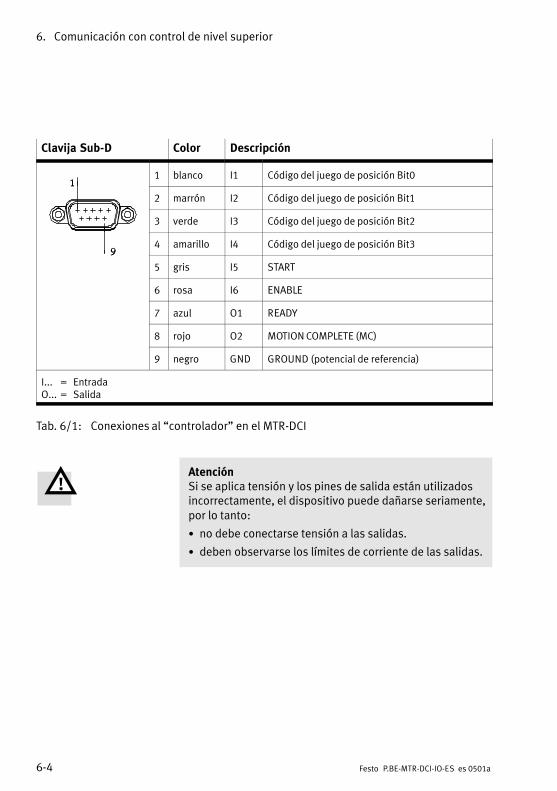
6. Comunicación con control de nivel superior
6−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
Clavija Sub−D Color Descripción
11 blanco I1 Código del juego de posición Bit0
1
2 marrón I2 Código del juego de posición Bit1
3 verde I3 Código del juego de posición Bit2
94 amarillo I4 Código del juego de posición Bit3
9
5 gris I5 START
6 rosa I6 ENABLE
7 azul O1 READY
8 rojo O2 MOTION COMPLETE (MC)
9 negro GND GROUND (potencial de referencia)
I... = EntradaO... = Salida
Tab.�6/1: Conexiones al �controlador" en el MTR−DCI
AtenciónSi se aplica tensión y los pines de salida están utilizadosincorrectamente, el dispositivo puede dañarse seriamente,por lo tanto:
· no debe conectarse tensión a las salidas.
· deben observarse los límites de corriente de las salidas.
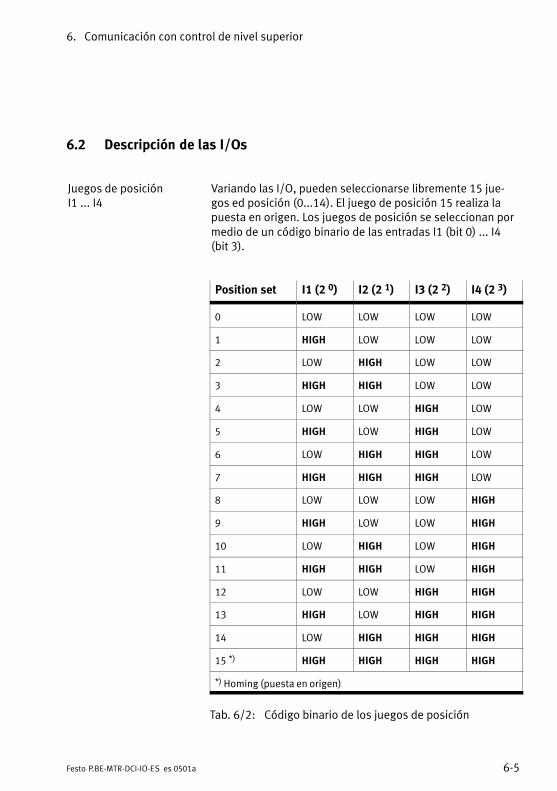
6. Comunicación con control de nivel superior
6−5Festo P.BE−MTR−DCI−IO−ES es 0501a
6.2 Descripción de las I/Os
Juegos de posición I1 ... I4
Variando las I/O, pueden seleccionarse libremente 15 jue�gos ed posición (0...14). El juego de posición 15 realiza lapuesta en origen. Los juegos de posición se seleccionan pormedio de un código binario de las entradas I1 (bit 0) ... I4(bit 3).
Position set I1 (2 0) I2 (2 1) I3 (2 2) I4 (2 3)
0 LOW LOW LOW LOW
1 HIGH LOW LOW LOW
2 LOW HIGH LOW LOW
3 HIGH HIGH LOW LOW
4 LOW LOW HIGH LOW
5 HIGH LOW HIGH LOW
6 LOW HIGH HIGH LOW
7 HIGH HIGH HIGH LOW
8 LOW LOW LOW HIGH
9 HIGH LOW LOW HIGH
10 LOW HIGH LOW HIGH
11 HIGH HIGH LOW HIGH
12 LOW LOW HIGH HIGH
13 HIGH LOW HIGH HIGH
14 LOW HIGH HIGH HIGH
15 *) HIGH HIGH HIGH HIGH
*) Homing (puesta en origen)
Tab.�6/2: Código binario de los juegos de posición
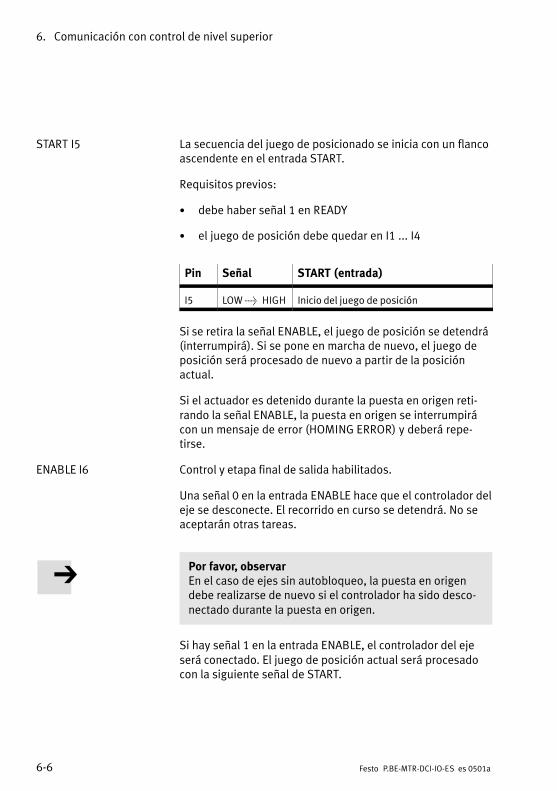
6. Comunicación con control de nivel superior
6−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
START I5 La secuencia del juego de posicionado se inicia con un flancoascendente en el entrada START.
Requisitos previos:
· debe haber señal 1 en READY
· el juego de posición debe quedar en I1 ... I4
Pin Señal START (entrada)
I5 LOW > HIGH Inicio del juego de posición
Si se retira la señal ENABLE, el juego de posición se detendrá(interrumpirá). Si se pone en marcha de nuevo, el juego deposición será procesado de nuevo a partir de la posiciónactual.
Si el actuador es detenido durante la puesta en origen reti�rando la señal ENABLE, la puesta en origen se interrumpirácon un mensaje de error (HOMING ERROR) y deberá repe�tirse.
ENABLE I6 Control y etapa final de salida habilitados.
Una señal 0 en la entrada ENABLE hace que el controlador deleje se desconecte. El recorrido en curso se detendrá. No seaceptarán otras tareas.
Por favor, observarEn el caso de ejes sin autobloqueo, la puesta en origendebe realizarse de nuevo si el controlador ha sido desco�nectado durante la puesta en origen.
Si hay señal 1 en la entrada ENABLE, el controlador del ejeserá conectado. El juego de posición actual será procesadocon la siguiente señal de START.
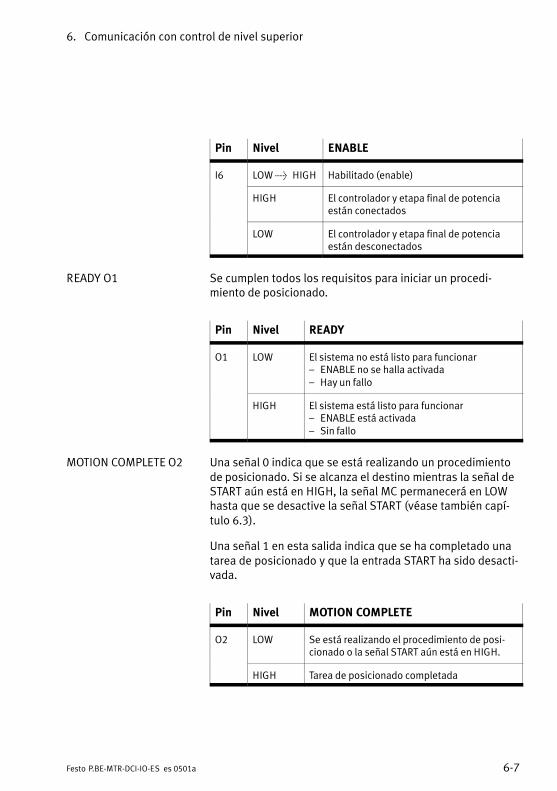
6. Comunicación con control de nivel superior
6−7Festo P.BE−MTR−DCI−IO−ES es 0501a
Pin Nivel ENABLE
I6 LOW > HIGH Habilitado (enable)
HIGH El controlador y etapa final de potenciaestán conectados
LOW El controlador y etapa final de potenciaestán desconectados
READY O1 Se cumplen todos los requisitos para iniciar un procedi�miento de posicionado.
Pin Nivel READY
O1 LOW El sistema no está listo para funcionar� ENABLE no se halla activada� Hay un fallo
HIGH El sistema está listo para funcionar� ENABLE está activada� Sin fallo
MOTION COMPLETE O2 Una señal 0 indica que se está realizando un procedimientode posicionado. Si se alcanza el destino mientras la señal deSTART aún está en HIGH, la señal MC permanecerá en LOWhasta que se desactive la señal START (véase también capí�tulo 6.3).
Una señal 1 en esta salida indica que se ha completado unatarea de posicionado y que la entrada START ha sido desacti�vada.
Pin Nivel MOTION COMPLETE
O2 LOW Se está realizando el procedimiento de posi�cionado o la señal START aún está en HIGH.
HIGH Tarea de posicionado completada
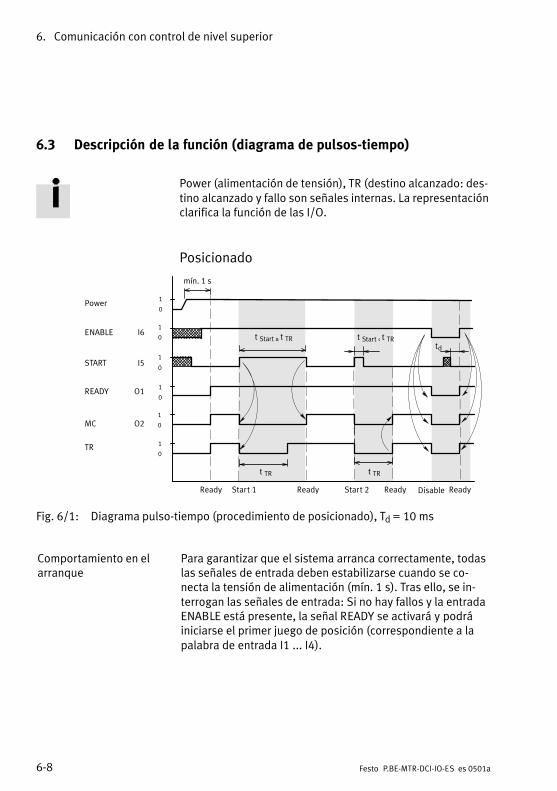
6. Comunicación con control de nivel superior
6−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
6.3 Descripción de la función (diagrama de pulsos−tiempo)
Power (alimentación de tensión), TR (destino alcanzado: des�tino alcanzado y fallo son señales internas. La representaciónclarifica la función de las I/O.
Posicionado
Start 1
t Start � t TR t Start � t TR
Start 2
START I5
ENABLE I6
READY
O2
O1
MC
TR
Power1
0
1
0
1
0
1
0
1
0
1
0
mín. 1 s
Disable
t TR t TR
Ready ReadyReady Ready
td
Fig.�6/1: Diagrama pulso−tiempo (procedimiento de posicionado), Td = 10 ms
Comportamiento en elarranque
Para garantizar que el sistema arranca correctamente, todaslas señales de entrada deben estabilizarse cuando se co�necta la tensión de alimentación (mín. 1 s). Tras ello, se in�terrogan las señales de entrada: Si no hay fallos y la entradaENABLE está presente, la señal READY se activará y podráiniciarse el primer juego de posición (correspondiente a lapalabra de entrada I1 ... I4).
6. Comunicación con control de nivel superior
6−9Festo P.BE−MTR−DCI−IO−ES es 0501a
Start 1 Cuando se activa la señal START (> HIGH), la señal MC(Motion Complete) se pondrá en LOW; el actuador se mueve ala posición de destino especificada. Si se activa la señal TR(=�target reached / destino alcanzado) mientras la señal deSTART aún está en HIGH, la señal MC permanecerá en LOWhasta que se desactive la señal START. Este par se señalesSTART / MC habilita la confirmación de señal para el PLC(función de handshake / entendimiento mutuo).
Start 2 Si la señal START se desactiva inmediatamente tras el arran�que, la señal MC se activará al mismo tiempo que la señal TRcuando se haya alcanzado el destino.
Disable / Enable Cuando la señal ENABLE está desactivada (disable) (> LOW),tanto la señal READY como la MC se desactivarán a nivel LOW.Cualquier señal de arranque será ignorada Cuando la señalENABLE está activa (> HIGH), las salidas se activarán denuevo de acuerdo con sus estados.
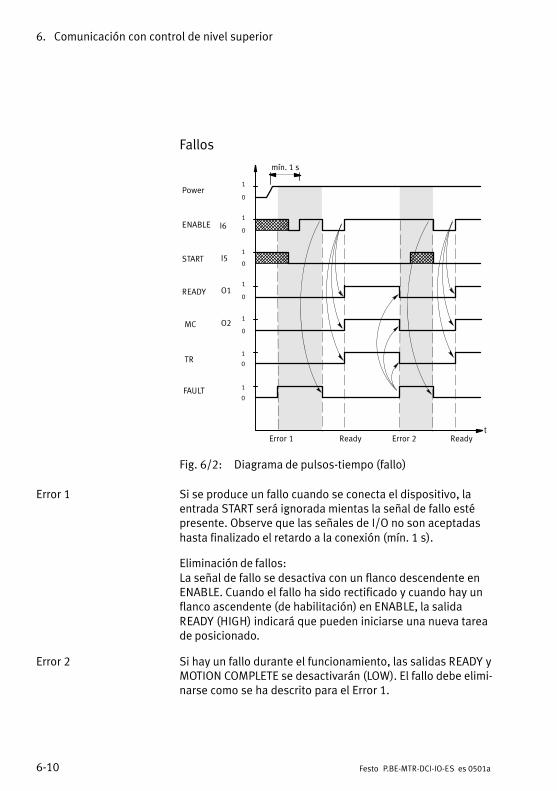
6. Comunicación con control de nivel superior
6−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
Fallos
START I5
ENABLE I6
READY
O2
O1
MC
TR
Power
FAULT
1
0
1
0
1
0
1
0
1
0
1
0
1
0
tError 1 Error 2Ready Ready
mín. 1 s
Fig.�6/2: Diagrama de pulsos−tiempo (fallo)
Error 1 Si se produce un fallo cuando se conecta el dispositivo, laentrada START será ignorada mientas la señal de fallo estépresente. Observe que las señales de I/O no son aceptadashasta finalizado el retardo a la conexión (mín. 1 s).
Eliminación de fallos:La señal de fallo se desactiva con un flanco descendente enENABLE. Cuando el fallo ha sido rectificado y cuando hay unflanco ascendente (de habilitación) en ENABLE, la salidaREADY (HIGH) indicará que pueden iniciarse una nueva tareade posicionado.
Error 2 Si hay un fallo durante el funcionamiento, las salidas READY yMOTION COMPLETE se desactivarán (LOW). El fallo debe elimi�narse como se ha descrito para el Error 1.
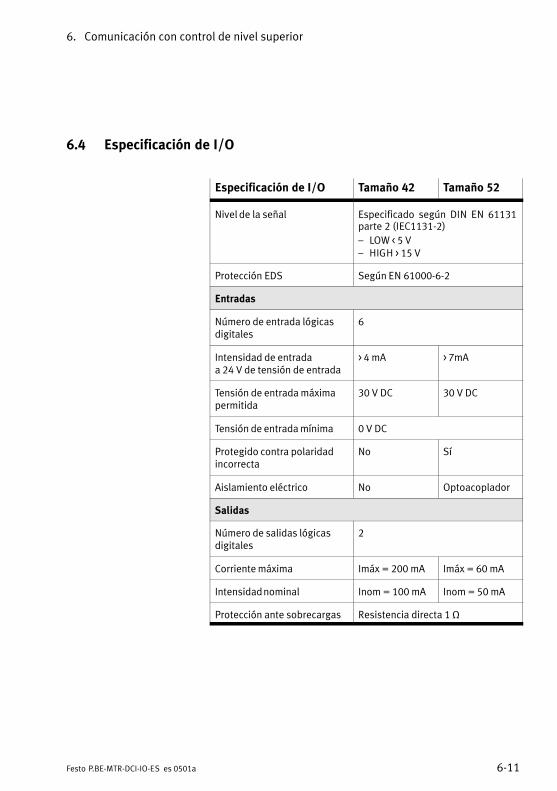
6. Comunicación con control de nivel superior
6−11Festo P.BE−MTR−DCI−IO−ES es 0501a
6.4 Especificación de I/O
Especificación de I/O Tamaño 42 Tamaño 52
Nivel de la señal Especificado según DIN EN 61131parte 2 (IEC1131−2)� LOW < 5 V� HIGH > 15 V
Protección EDS Según EN 61000−6−2
Entradas
Número de entrada lógicasdigitales
6
Intensidad de entrada a 24 V de tensión de entrada
> 4 mA > 7mA
Tensión de entrada máximapermitida
30 V DC 30 V DC
Tensión de entrada mínima 0 V DC
Protegido contra polaridadincorrecta
No Sí
Aislamiento eléctrico No Optoacoplador
Salidas
Número de salidas lógicasdigitales
2
Corriente máxima Imáx = 200 mA Imáx = 60 mA
Intensidad nominal Inom = 100 mA Inom = 50 mA
Protección ante sobrecargas Resistencia directa 1

6. Comunicación con control de nivel superior
6−12 Festo P.BE−MTR−DCI−IO−ES es 0501a
Comunicación a través del interface serie
7−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Capítulo 7
7. Comunicación a través del interface serie
7−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
7. Comunicación a través del interface serie 7−1 . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 El Command Interpreter (CI) 7−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Procedimiento para la transferencia de datos 7−4 . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Directorio de objetos 7−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.1 Objetos para la descripción del dispositivo 7−7 . . . . . . . . . . . . . . . . . . .
7.3.2 Objetos generales 7−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.3 Objetos para parametrización y puesta a punto 7−8 . . . . . . . . . . . . . . .
7.3.4 Objetos para crear juegos de posiciones 7−9 . . . . . . . . . . . . . . . . . . . . .
7.3.5 Objetos para el controlador 7−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.6 Objetos para el ajuste del modo de funcionamiento y control 7−10 . . . .
7.3.7 Objetos para diagnosis 7−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7. Comunicación a través del interface serie
7−3Festo P.BE−MTR−DCI−IO−ES es 0501a
7.1 El Command Interpreter (CI)
Las órdenes implementadas en el Command Interpreter(intérprete de órdenes) del MTR−DCI están basadas conrespecto a su contenido en los Objetos estandarizados porCANopen (CiA Draft Standards 402).Grupo 1xxx Descripción del dispositivoGrupo 2xxx Órdenes FestoGrupo 6xxx Órdenes según CANopen
El CiA Draft Standard 402: trata de la implementación con�creta de CANopen en controles para accionamientos.
Directorio de objetos Todas las posibilidades de parametrización y control estánrelacionadas en el Object directory (Directorio de Objetos).Puede accederse al Object directory del controlador a travésde los Service Data Objects (SDO). Los SDOs se utilizan parala parametrización normal del controlador. El acceso a losSDO se hace siempre desde un control de nivel superior(host). Un número inequívoco (índice, sub−índice) es asig�nado a cada Object.
Procedimiento de acceso El control de nivel superior envía al controlador, o bien unaorden de escritura (WRITE) para modificar un parámetro delObject directory, o una orden de lectura (READ) para leer unparámetro.
Para cada orden, el control de nivel superior recibe una res�puesta que contiene o bien el valor leído o la confirmación dela orden de escritura. El valor transferido (1, 2 o 4 bytes dedatos) depende del tipo de datos del Object a leer o a escribir.
A partir de la versión 1.19, el firmware del MTR−DCI ofrece laposibilidad de simular el acceso a SDO con órdenes CI a tra�vés del interface RS232.
7. Comunicación a través del interface serie
7−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
7.2 Procedimiento para la transferencia de datos
PrecauciónEn casos de aplicación especiales, el acceso con órdenesCI permite la parametrización y la puesta a punto delMTR−DCI directamente a través del interface RS232. No obstante, no es adecuado para una comunicación entiempo real. El control del MTR−DCI a través de RS232 nocumple con el uso al que se destina y requiere también:
� una estimación del riesgo por parte del usuario
� condiciones ambientales libres de interferencias
� salvaguarda de la transmisión de datos, p. ej. a travésdel programa de control del host.
· Utilice preferentemente el panel de control o el FCT parala puesta a punto y la parametrización.
· Utilice el interface de control del MTR−DCI para elcontrol.
AtenciónLesiones a las personas y daños a la propiedad.
A través de las órdenes del CI se tiene pleno acceso a lasvariables internas del servoregulador. Un manejo inco�rrecto puede hacer que el controlador reaccione de formaimprevista y que el motor arranque sin control.
· Utilice las órdenes del CI sólo si ya tiene experiencia enel Service Data Objects.
· Infórmese sobre el uso de los Object en en CiA DraftStandard 402 antes de utilizar las órdenes CI delCommand Interpreter del MTR−DCI.
Para la transferencia de datos , necesitará un programaemulador de terminal, disponible comercialmente.
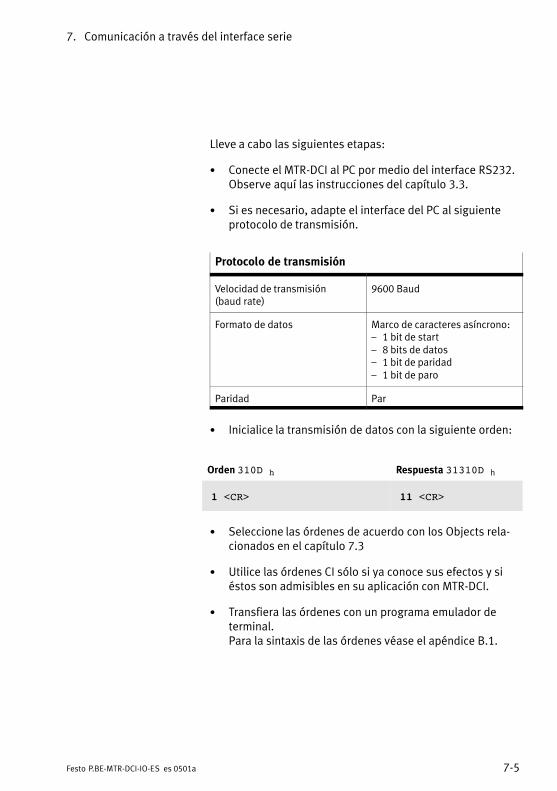
7. Comunicación a través del interface serie
7−5Festo P.BE−MTR−DCI−IO−ES es 0501a
Lleve a cabo las siguientes etapas:
· Conecte el MTR−DCI al PC por medio del interface RS232.Observe aquí las instrucciones del capítulo 3.3.
· Si es necesario, adapte el interface del PC al siguienteprotocolo de transmisión.
Protocolo de transmisión
Velocidad de transmisión (baud rate)
9600 Baud
Formato de datos Marco de caracteres asíncrono:� 1 bit de start� 8 bits de datos� 1 bit de paridad� 1 bit de paro
Paridad Par
· Inicialice la transmisión de datos con la siguiente orden:
Orden 310D h Respuesta 31310D h
1 <CR> 11 <CR>
· Seleccione las órdenes de acuerdo con los Objects rela�cionados en el capítulo 7.3
· Utilice las órdenes CI sólo si ya conoce sus efectos y siéstos son admisibles en su aplicación con MTR−DCI.
· Transfiera las órdenes con un programa emulador determinal. Para la sintaxis de las órdenes véase el apéndice B.1.
7. Comunicación a través del interface serie
7−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
Fallos de transmisión Si hay fallos en la transmisión, se transmitirá el valor <0xFF>en lugar de la respuesta usual.
Posibles causas:
� carácter de inicio incorrecto, carácter separado o caráctervacío,
� cifra hex incorrecta
� tipo de valor incorrecto.
Por favor, observarLa transmisión de la orden es repetida 8 veces por el host.Tras esto, la conexión serie se considera inutilizable y esinterrumpida. Entonces debe inicializarse de nuevo latransmisión.
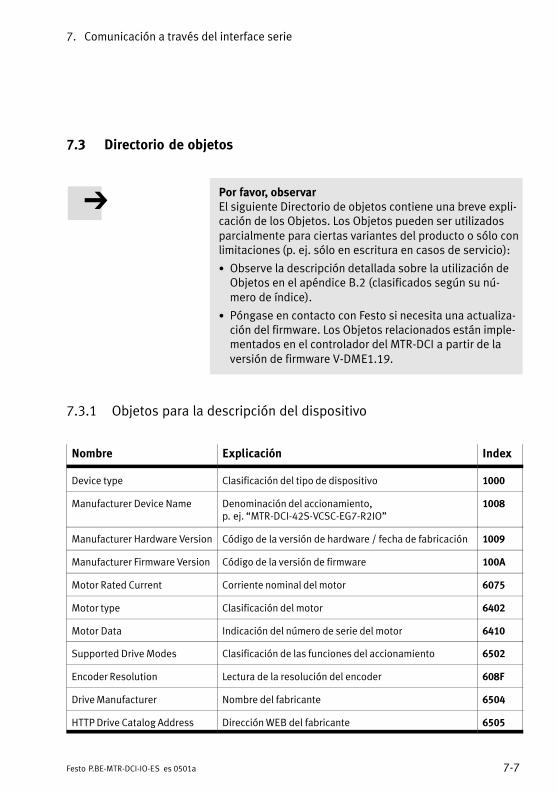
7. Comunicación a través del interface serie
7−7Festo P.BE−MTR−DCI−IO−ES es 0501a
7.3 Directorio de objetos
Por favor, observarEl siguiente Directorio de objetos contiene una breve expli�cación de los Objetos. Los Objetos pueden ser utilizadosparcialmente para ciertas variantes del producto o sólo conlimitaciones (p. ej. sólo en escritura en casos de servicio):
· Observe la descripción detallada sobre la utilización deObjetos en el apéndice B.2 (clasificados según su nú�mero de índice).
· Póngase en contacto con Festo si necesita una actualiza�ción del firmware. Los Objetos relacionados están imple�mentados en el controlador del MTR−DCI a partir de laversión de firmware V−DME1.19.
7.3.1 Objetos para la descripción del dispositivo
Nombre Explicación Index
Device type Clasificación del tipo de dispositivo 1000
Manufacturer Device Name Denominación del accionamiento, p.�ej. �MTR−DCI−42S−VCSC−EG7−R2IO"
1008
Manufacturer Hardware Version Código de la versión de hardware / fecha de fabricación 1009
Manufacturer Firmware Version Código de la versión de firmware 100A
Motor Rated Current Corriente nominal del motor 6075
Motor type Clasificación del motor 6402
Motor Data Indicación del número de serie del motor 6410
Supported Drive Modes Clasificación de las funciones del accionamiento 6502
Encoder Resolution Lectura de la resolución del encoder 608F
Drive Manufacturer Nombre del fabricante 6504
HTTP Drive Catalog Address Dirección WEB del fabricante 6505
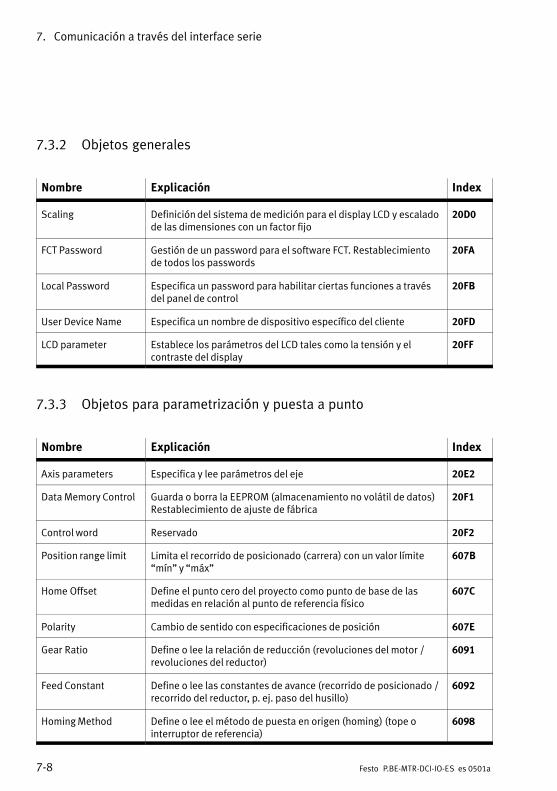
7. Comunicación a través del interface serie
7−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
7.3.2 Objetos generales
Nombre Explicación Index
Scaling Definición del sistema de medición para el display LCD y escaladode las dimensiones con un factor fijo
20D0
FCT Password Gestión de un password para el software FCT. Restablecimientode todos los passwords
20FA
Local Password Especifica un password para habilitar ciertas funciones a travésdel panel de control
20FB
User Device Name Especifica un nombre de dispositivo específico del cliente 20FD
LCD parameter Establece los parámetros del LCD tales como la tensión y elcontraste del display
20FF
7.3.3 Objetos para parametrización y puesta a punto
Nombre Explicación Index
Axis parameters Especifica y lee parámetros del eje 20E2
Data Memory Control Guarda o borra la EEPROM (almacenamiento no volátil de datos)Restablecimiento de ajuste de fábrica
20F1
Control word Reservado 20F2
Position range limit Limita el recorrido de posicionado (carrera) con un valor límite�mín" y �máx"
607B
Home Offset Define el punto cero del proyecto como punto de base de lasmedidas en relación al punto de referencia físico
607C
Polarity Cambio de sentido con especificaciones de posición 607E
Gear Ratio Define o lee la relación de reducción (revoluciones del motor /revoluciones del reductor)
6091
Feed Constant Define o lee las constantes de avance (recorrido de posicionado /recorrido del reductor, p. ej. paso del husillo)
6092
Homing Method Define o lee el método de puesta en origen (homing) (tope ointerruptor de referencia)
6098
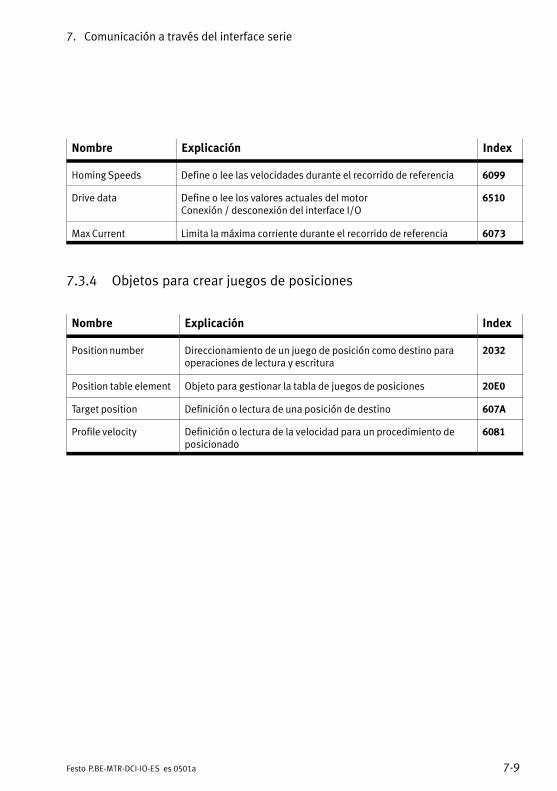
7. Comunicación a través del interface serie
7−9Festo P.BE−MTR−DCI−IO−ES es 0501a
Nombre IndexExplicación
Homing Speeds Define o lee las velocidades durante el recorrido de referencia 6099
Drive data Define o lee los valores actuales del motorConexión / desconexión del interface I/O
6510
Max Current Limita la máxima corriente durante el recorrido de referencia 6073
7.3.4 Objetos para crear juegos de posiciones
Nombre Explicación Index
Position number Direccionamiento de un juego de posición como destino paraoperaciones de lectura y escritura
2032
Position table element Objeto para gestionar la tabla de juegos de posiciones 20E0
Target position Definición o lectura de una posición de destino 607A
Profile velocity Definición o lectura de la velocidad para un procedimiento deposicionado
6081
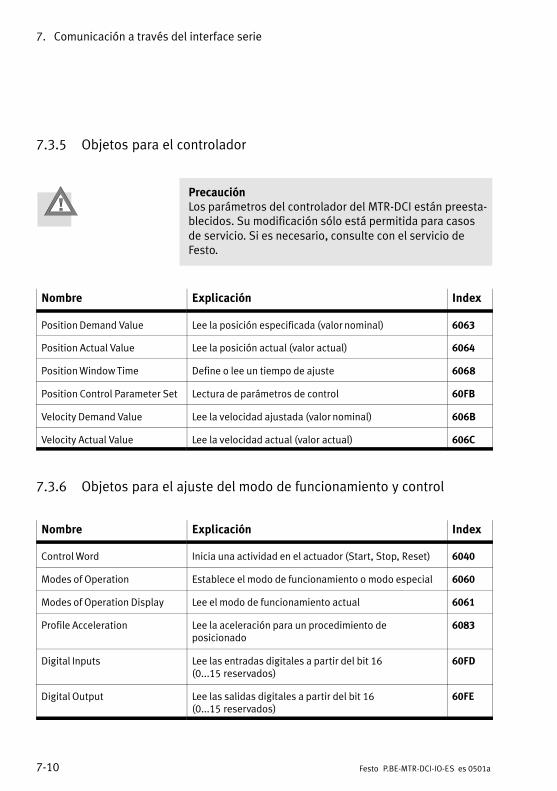
7. Comunicación a través del interface serie
7−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
7.3.5 Objetos para el controlador
PrecauciónLos parámetros del controlador del MTR−DCI están preesta�blecidos. Su modificación sólo está permitida para casosde servicio. Si es necesario, consulte con el servicio deFesto.
Nombre Explicación Index
Position Demand Value Lee la posición especificada (valor nominal) 6063
Position Actual Value Lee la posición actual (valor actual) 6064
Position Window Time Define o lee un tiempo de ajuste 6068
Position Control Parameter Set Lectura de parámetros de control 60FB
Velocity Demand Value Lee la velocidad ajustada (valor nominal) 606B
Velocity Actual Value Lee la velocidad actual (valor actual) 606C
7.3.6 Objetos para el ajuste del modo de funcionamiento y control
Nombre Explicación Index
Control Word Inicia una actividad en el actuador (Start, Stop, Reset) 6040
Modes of Operation Establece el modo de funcionamiento o modo especial 6060
Modes of Operation Display Lee el modo de funcionamiento actual 6061
Profile Acceleration Lee la aceleración para un procedimiento deposicionado
6083
Digital Inputs Lee las entradas digitales a partir del bit 16 (0...15 reservados)
60FD
Digital Output Lee las salidas digitales a partir del bit 16 (0...15 reservados)
60FE
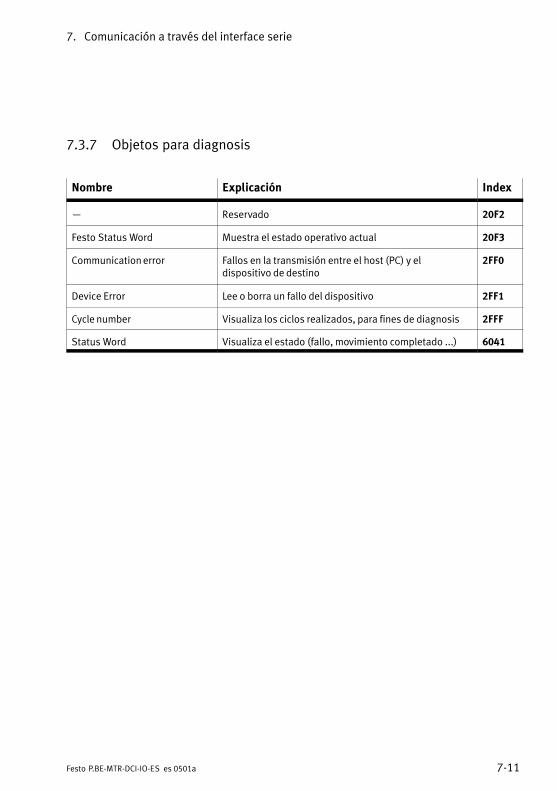
7. Comunicación a través del interface serie
7−11Festo P.BE−MTR−DCI−IO−ES es 0501a
7.3.7 Objetos para diagnosis
Nombre Explicación Index
Reservado 20F2
Festo Status Word Muestra el estado operativo actual 20F3
Communication error Fallos en la transmisión entre el host (PC) y eldispositivo de destino
2FF0
Device Error Lee o borra un fallo del dispositivo 2FF1
Cycle number Visualiza los ciclos realizados, para fines de diagnosis 2FFF
Status Word Visualiza el estado (fallo, movimiento completado ...) 6041

7. Comunicación a través del interface serie
7−12 Festo P.BE−MTR−DCI−IO−ES es 0501a

Apéndice técnico
A−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Apéndice A
A. Apéndice técnico
A−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
A. Apéndice técnico A−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas A−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Accesorios A−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Curvas características del motor A−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
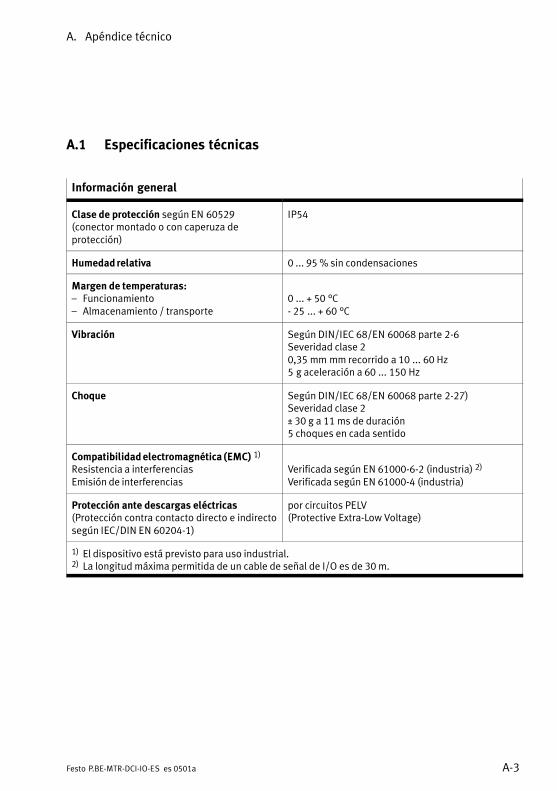
A. Apéndice técnico
A−3Festo P.BE−MTR−DCI−IO−ES es 0501a
A.1 Especificaciones técnicas
Información general
Clase de protección según EN�60529 (conector montado o con caperuza deprotección)
IP54
Humedad relativa 0 ... 95 % sin condensaciones
Margen de temperaturas:� Funcionamiento� Almacenamiento / transporte
0 ... + 50�°C− 25�... + 60�°C
Vibración Según DIN/IEC 68/EN�60068 parte 2−6Severidad clase 20,35�mm�mm recorrido a 10�...�60 Hz5�g aceleración a 60�...�150�Hz
Choque Según DIN/IEC 68/EN�60068 parte 2−27)Severidad clase 2± 30 g a 11�ms de duración5 choques en cada sentido
Compatibilidad electromagnética (EMC) 1)
Resistencia a interferenciasEmisión de interferencias
Verificada según EN 61000−6−2 (industria) 2)
Verificada según EN 61000−4 (industria)
Protección ante descargas eléctricas(Protección contra contacto directo e indirectosegún IEC/DIN EN 60204−1)
por circuitos PELV (Protective�Extra−Low Voltage)
1) El dispositivo está previsto para uso industrial.2) La longitud máxima permitida de un cable de señal de I/O es de 30 m.
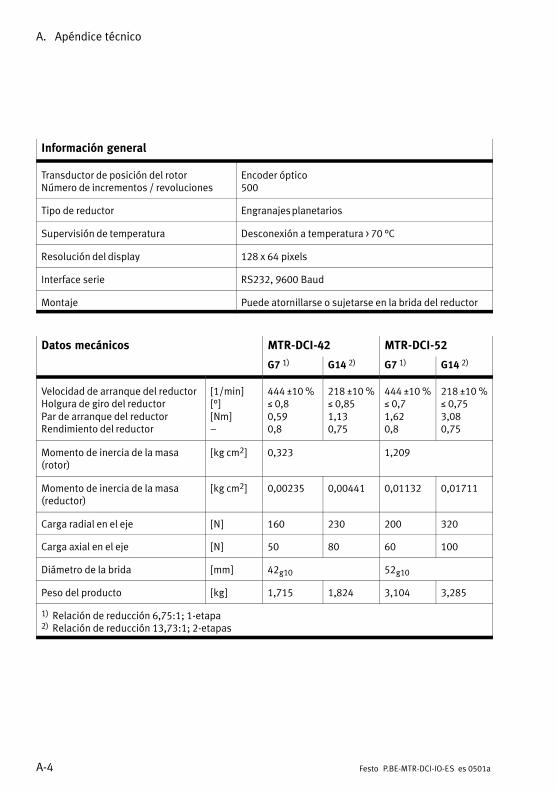
A. Apéndice técnico
A−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
Información general
Transductor de posición del rotorNúmero de incrementos / revoluciones
Encoder óptico500
Tipo de reductor Engranajes planetarios
Supervisión de temperatura Desconexión a temperatura > 70 °C
Resolución del display 128 x 64 pixels
Interface serie RS232, 9600 Baud
Montaje Puede atornillarse o sujetarse en la brida del reductor
Datos mecánicos MTR−DCI−42 MTR−DCI−52
G7 1) G14 2) G7 1) G14 2)
Velocidad de arranque del reductorHolgura de giro del reductorPar de arranque del reductorRendimiento del reductor
[1/min][°][Nm]�
444 ±10 %� 0,80,590,8
218 ±10 %� 0,851,130,75
444 ±10 %� 0,71,620,8
218 ±10 %� 0,753,080,75
Momento de inercia de la masa(rotor)
[kg cm2] 0,323 1,209
Momento de inercia de la masa(reductor)
[kg cm2] 0,00235 0,00441 0,01132 0,01711
Carga radial en el eje [N] 160 230 200 320
Carga axial en el eje [N] 50 80 60 100
Diámetro de la brida [mm] 42g10 52g10
Peso del producto [kg] 1,715 1,824 3,104 3,285
1) Relación de reducción 6,75:1; 1−etapa2) Relación de reducción 13,73:1; 2−etapas
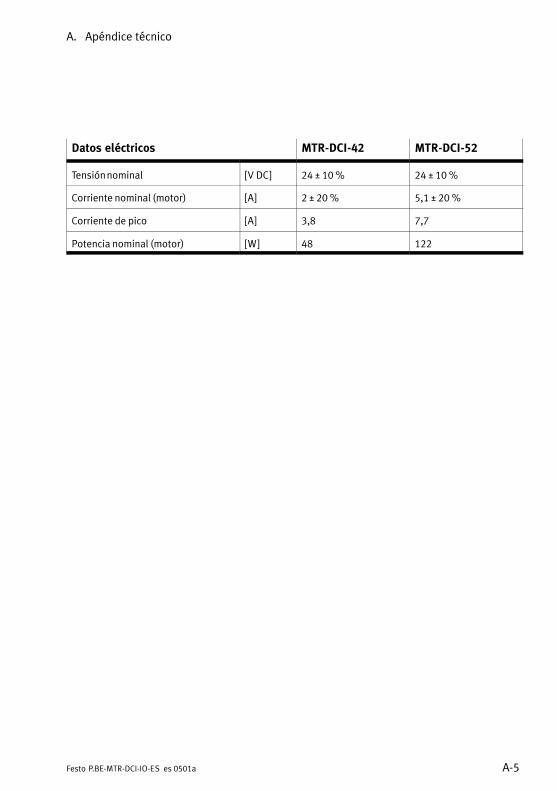
A. Apéndice técnico
A−5Festo P.BE−MTR−DCI−IO−ES es 0501a
Datos eléctricos MTR−DCI−42 MTR−DCI−52
Tensión nominal [V DC] 24 ± 10 % 24 ± 10 %
Corriente nominal (motor) [A] 2 ± 20 % 5,1 ± 20 %
Corriente de pico [A] 3,8 7,7
Potencia nominal (motor) [W] 48 122
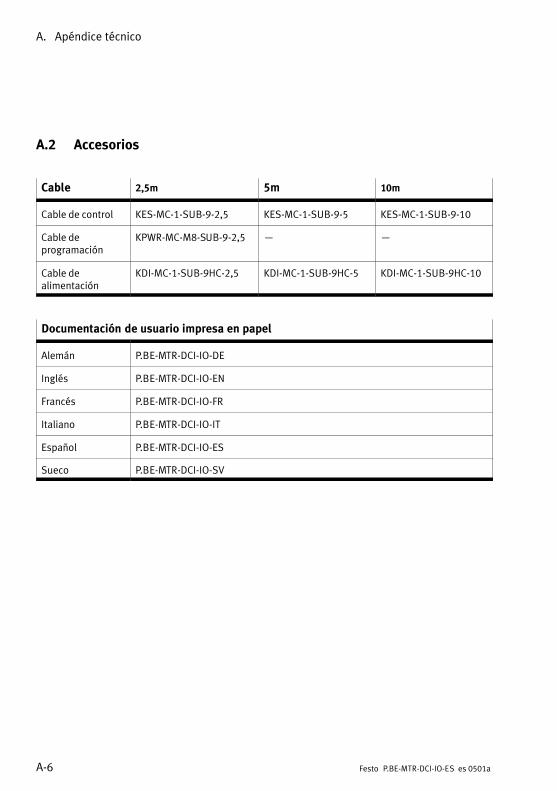
A. Apéndice técnico
A−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
A.2 Accesorios
Cable 2,5m 5m 10m
Cable de control KES−MC−1−SUB−9−2,5 KES−MC−1−SUB−9−5 KES−MC−1−SUB−9−10
Cable deprogramación
KPWR−MC−M8−SUB−9−2,5
Cable dealimentación
KDI−MC−1−SUB−9HC−2,5 KDI−MC−1−SUB−9HC−5 KDI−MC−1−SUB−9HC−10
Documentación de usuario impresa en papel
Alemán P.BE−MTR−DCI−IO−DE
Inglés P.BE−MTR−DCI−IO−EN
Francés P.BE−MTR−DCI−IO−FR
Italiano P.BE−MTR−DCI−IO−IT
Español P.BE−MTR−DCI−IO−ES
Sueco P.BE−MTR−DCI−IO−SV
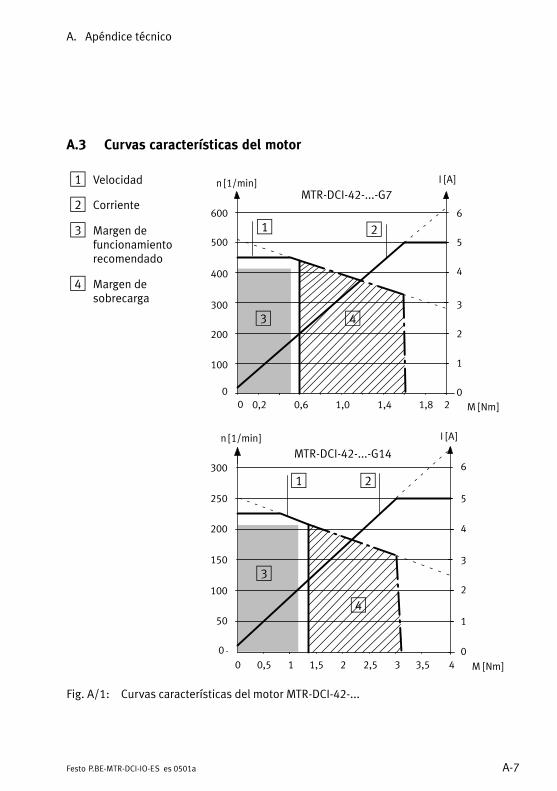
A. Apéndice técnico
A−7Festo P.BE−MTR−DCI−IO−ES es 0501a
A.3 Curvas características del motor
1 Velocidad
2 Corriente
3 Margen defuncionamientorecomendado
4 Margen desobrecarga
100
200
300
400
500
600
01,00,2 0,6 21,4 1,8
6
5
4
3
2
1
0M�[Nm]
1 2
3 4
n [1/min]MTR−DCI−42−...−G7
I�[A]
0
M�[Nm]
I�[A]
6
5
4
3
2
1
043,52,50,50
250
200
150
100
50
0
300
1 31,5 2
1 2
3
4
MTR−DCI−42−...−G14n [1/min]
Fig.�A/1: Curvas características del motor MTR−DCI−42−...
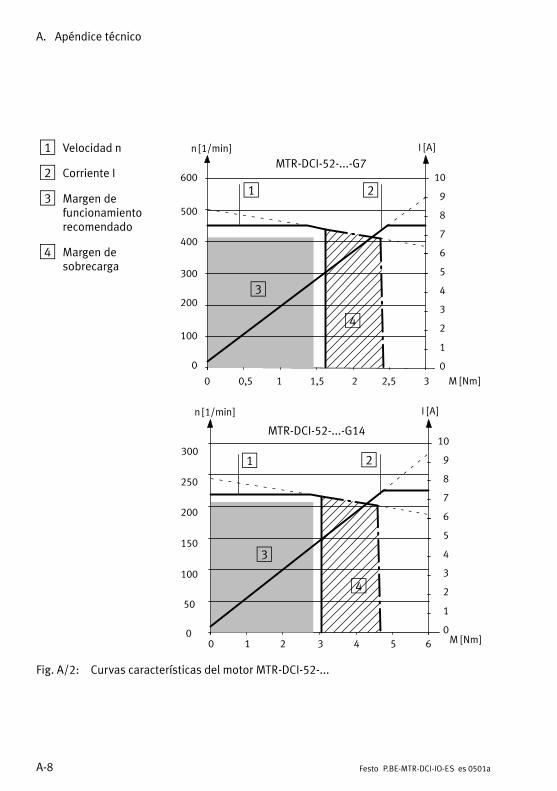
A. Apéndice técnico
A−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
1 Velocidad n
2 Corriente I
3 Margen defuncionamientorecomendado
4 Margen desobrecarga
100
200
300
400
500
600
0
3
4
6
5
4
3
2
1
0
MTR−DCI−52−...−G7
2,50,50 31,5 21
I�[A]n [1/min]
M�[Nm]
7
8
9
101 2
MTR−DCI−52−...−G14
250
200
150
100
50
300
010
I�[A]n [1/min]
M�[Nm]2 3 4 5 6
6
5
4
3
2
1
0
7
8
9
10
1 2
3
4
Fig.�A/2: Curvas características del motor MTR−DCI−52−...

Información suplementario
B−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Apéndice B
B. Información suplementario
B−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
B. Información suplementario B−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Órdenes CI B−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Descripción del objeto B−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.1 Clasificación de objetos (cuadro general) B−7 . . . . . . . . . . . . . . . . . . . .
B.2.2 Grupo 1xxx B−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.3 Grupo 2xxx B−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.4 Grupo 6xxx B−20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Conversión de las unidades de medida B−40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
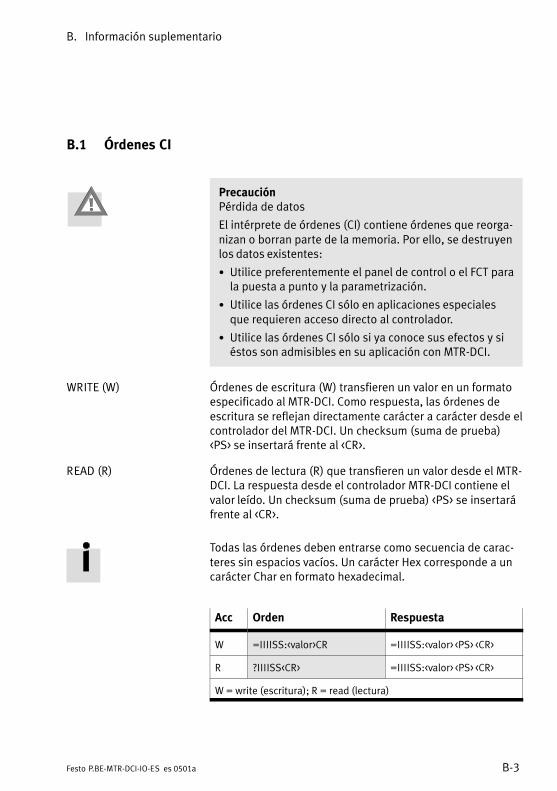
B. Información suplementario
B−3Festo P.BE−MTR−DCI−IO−ES es 0501a
B.1 Órdenes CI
PrecauciónPérdida de datos
El intérprete de órdenes (CI) contiene órdenes que reorga�nizan o borran parte de la memoria. Por ello, se destruyenlos datos existentes:
· Utilice preferentemente el panel de control o el FCT parala puesta a punto y la parametrización.
· Utilice las órdenes CI sólo en aplicaciones especialesque requieren acceso directo al controlador.
· Utilice las órdenes CI sólo si ya conoce sus efectos y siéstos son admisibles en su aplicación con MTR−DCI.
WRITE (W) Órdenes de escritura (W) transfieren un valor en un formatoespecificado al MTR−DCI. Como respuesta, las órdenes deescritura se reflejan directamente carácter a carácter desde elcontrolador del MTR−DCI. Un checksum (suma de prueba)<PS> se insertará frente al <CR>.
READ (R) Órdenes de lectura (R) que transfieren un valor desde el MTR−DCI. La respuesta desde el controlador MTR−DCI contiene elvalor leído. Un checksum (suma de prueba) <PS> se insertaráfrente al <CR>.
Todas las órdenes deben entrarse como secuencia de carac�teres sin espacios vacíos. Un carácter Hex corresponde a uncarácter Char en formato hexadecimal.
Acc Orden Respuesta
W =IIIISS:<valor>CR =IIIISS:<valor> <PS> <CR>
R ?IIIISS<CR> =IIIISS:<valor> <PS> <CR>
W = write (escritura); R = read (lectura)
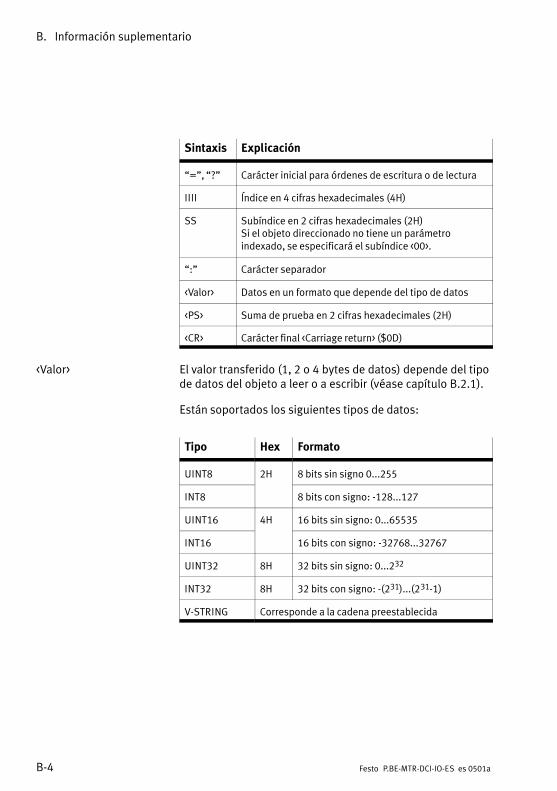
B. Información suplementario
B−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
Sintaxis Explicación
�=", �?" Carácter inicial para órdenes de escritura o de lectura
IIII Índice en 4 cifras hexadecimales (4H)
SS Subíndice en 2 cifras hexadecimales (2H)Si el objeto direccionado no tiene un parámetroindexado, se especificará el subíndice <00>.
�:" Carácter separador
<Valor> Datos en un formato que depende del tipo de datos
<PS> Suma de prueba en 2 cifras hexadecimales (2H)
<CR> Carácter final <Carriage return> ($0D)
<Valor> El valor transferido (1, 2 o 4 bytes de datos) depende del tipode datos del objeto a leer o a escribir (véase capítulo B.2.1).
Están soportados los siguientes tipos de datos:
Tipo Hex Formato
UINT8 2H 8 bits sin signo 0...255
INT8 8 bits con signo: −128...127
UINT16 4H 16 bits sin signo: 0...65535
INT16 16 bits con signo: −32768...32767
UINT32 8H 32 bits sin signo: 0...232
INT32 8H 32 bits con signo: −(231)...(231−1)
V−STRING Corresponde a la cadena preestablecida
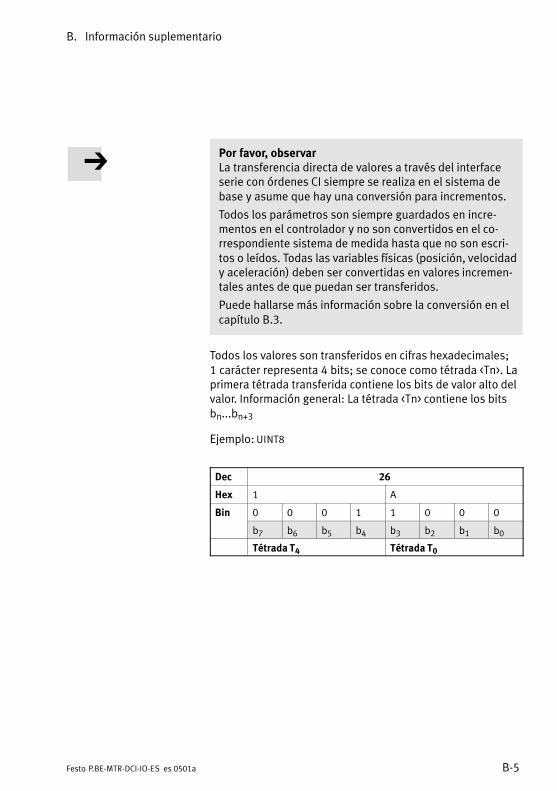
B. Información suplementario
B−5Festo P.BE−MTR−DCI−IO−ES es 0501a
Por favor, observarLa transferencia directa de valores a través del interfaceserie con órdenes CI siempre se realiza en el sistema debase y asume que hay una conversión para incrementos.
Todos los parámetros son siempre guardados en incre�mentos en el controlador y no son convertidos en el co�rrespondiente sistema de medida hasta que no son escri�tos o leídos. Todas las variables físicas (posición, velocidady aceleración) deben ser convertidas en valores incremen�tales antes de que puedan ser transferidos.
Puede hallarse más información sobre la conversión en elcapítulo B.3.
Todos los valores son transferidos en cifras hexadecimales;1�carácter representa 4 bits; se conoce como tétrada <Tn>. Laprimera tétrada transferida contiene los bits de valor alto delvalor. Información general: La tétrada <Tn> contiene los bitsbn...bn+3
Ejemplo: UINT8
Dec 26
Hex 1 A
Bin 0 0 0 1 1 0 0 0
b7 b6 b5 b4 b3 b2 b1 b0
Tétrada T4 Tétrada T0
B. Información suplementario
B−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
Checksum <PS> La suma de prueba se forma a partir de la suma de todos losbytes enviados y reducida a 1 byte (módulo 256).
La otra estación debe comparar la orden enviada con el �eco"de controlador y procesar la suma de prueba.
Checksum (suma de prueba)
Sintaxis IIIISS:<checksum>
Formato 2 cifras hexadecimales
Tipo UINT8
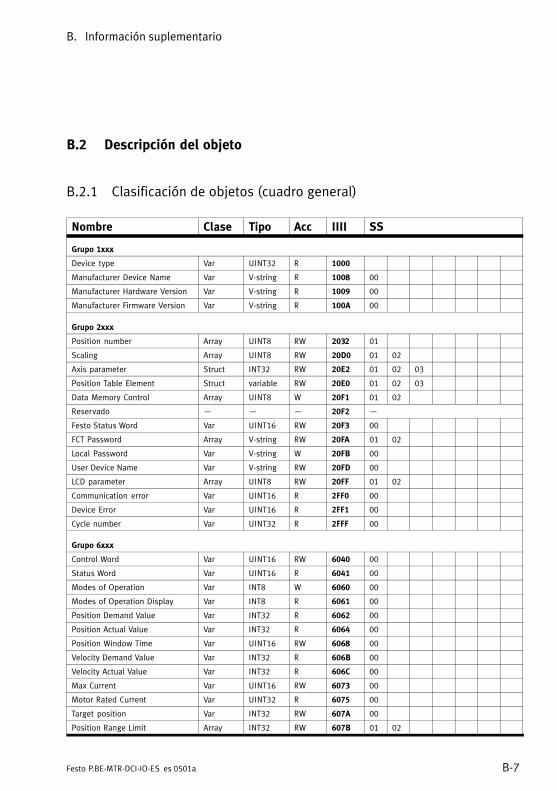
B. Información suplementario
B−7Festo P.BE−MTR−DCI−IO−ES es 0501a
B.2 Descripción del objeto
B.2.1 Clasificación de objetos (cuadro general)
Nombre Clase Tipo Acc IIII SS
Grupo 1xxx
Device type Var UINT32 R 1000
Manufacturer Device Name Var V−string R 1008 00
Manufacturer Hardware Version Var V−string R 1009 00
Manufacturer Firmware Version Var V−string R 100A 00
Grupo 2xxx
Position number Array UINT8 RW 2032 01
Scaling Array UINT8 RW 20D0 01 02
Axis parameter Struct INT32 RW 20E2 01 02 03
Position Table Element Struct variable RW 20E0 01 02 03
Data Memory Control Array UINT8 W 20F1 01 02
Reservado 20F2
Festo Status Word Var UINT16 RW 20F3 00
FCT Password Array V−string RW 20FA 01 02
Local Password Var V−string W 20FB 00
User Device Name Var V−string RW 20FD 00
LCD parameter Array UINT8 RW 20FF 01 02
Communication error Var UINT16 R 2FF0 00
Device Error Var UINT16 R 2FF1 00
Cycle number Var UINT32 R 2FFF 00
Grupo 6xxx
Control Word Var UINT16 RW 6040 00
Status Word Var UINT16 R 6041 00
Modes of Operation Var INT8 W 6060 00
Modes of Operation Display Var INT8 R 6061 00
Position Demand Value Var INT32 R 6062 00
Position Actual Value Var INT32 R 6064 00
Position Window Time Var UINT16 RW 6068 00
Velocity Demand Value Var INT32 R 606B 00
Velocity Actual Value Var INT32 R 606C 00
Max Current Var UINT16 RW 6073 00
Motor Rated Current Var UINT32 R 6075 00
Target position Var INT32 RW 607A 00
Position Range Limit Array INT32 RW 607B 01 02
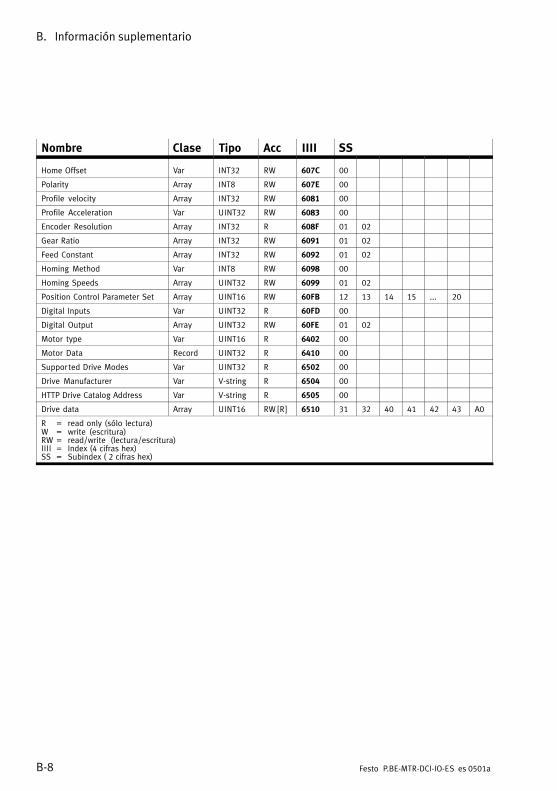
B. Información suplementario
B−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
Nombre SSIIIIAccTipoClase
Home Offset Var INT32 RW 607C 00
Polarity Array INT8 RW 607E 00
Profile velocity Array INT32 RW 6081 00
Profile Acceleration Var UINT32 RW 6083 00
Encoder Resolution Array INT32 R 608F 01 02
Gear Ratio Array INT32 RW 6091 01 02
Feed Constant Array INT32 RW 6092 01 02
Homing Method Var INT8 RW 6098 00
Homing Speeds Array UINT32 RW 6099 01 02
Position Control Parameter Set Array UINT16 RW 60FB 12 13 14 15 ... 20
Digital Inputs Var UINT32 R 60FD 00
Digital Output Array UINT32 RW 60FE 01 02
Motor type Var UINT16 R 6402 00
Motor Data Record UINT32 R 6410 00
Supported Drive Modes Var UINT32 R 6502 00
Drive Manufacturer Var V−string R 6504 00
HTTP Drive Catalog Address Var V−string R 6505 00
Drive data Array UINT16 RW [R] 6510 31 32 40 41 42 43 A0
R = read only (sólo lectura)W = write (escritura)RW = read/write (lectura/escritura)IIII = Index (4 cifras hex)SS = Subindex ( 2 cifras hex)
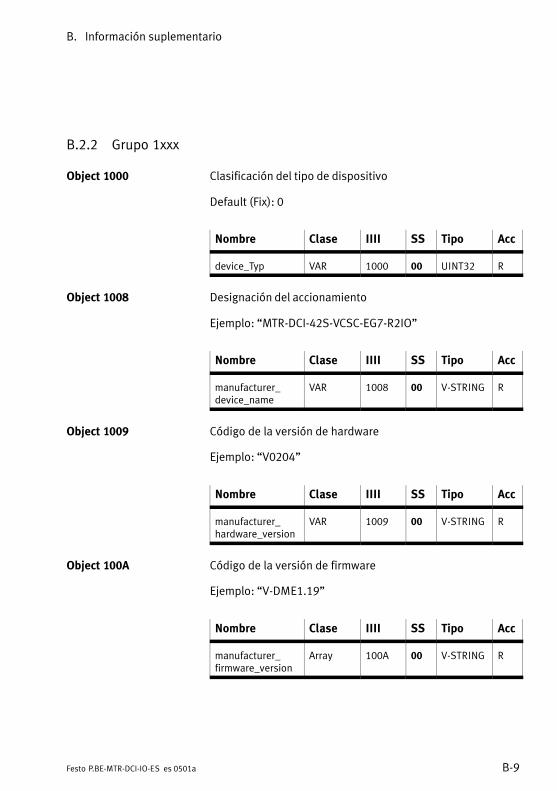
B. Información suplementario
B−9Festo P.BE−MTR−DCI−IO−ES es 0501a
B.2.2 Grupo 1xxx
Object 1000 Clasificación del tipo de dispositivo
Default (Fix): 0
Nombre Clase IIII SS Tipo Acc
device_Typ VAR 1000 00 UINT32 R
Object 1008 Designación del accionamiento
Ejemplo: �MTR−DCI−42S−VCSC−EG7−R2IO"
Nombre Clase IIII SS Tipo Acc
manufacturer_device_name
VAR 1008 00 V−STRING R
Object 1009 Código de la versión de hardware
Ejemplo: �V0204"
Nombre Clase IIII SS Tipo Acc
manufacturer_hardware_version
VAR 1009 00 V−STRING R
Object 100A Código de la versión de firmware
Ejemplo: �V−DME1.19"
Nombre Clase IIII SS Tipo Acc
manufacturer_firmware_version
Array 100A 00 V−STRING R
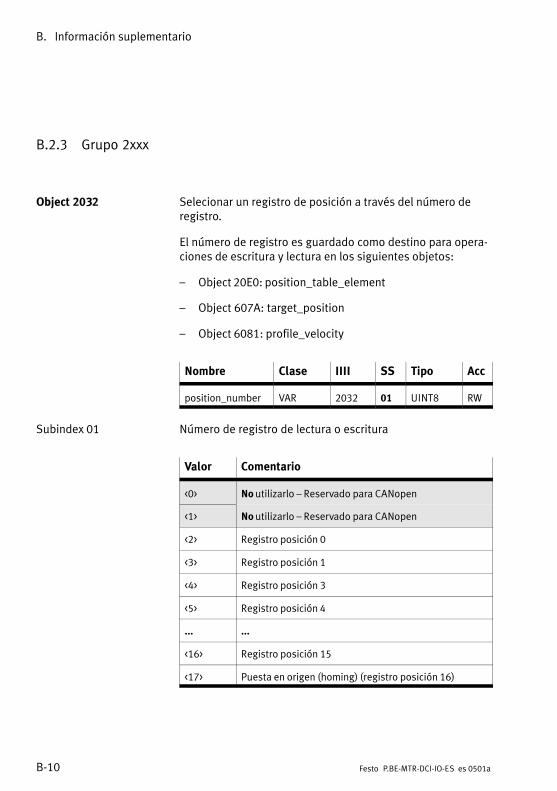
B. Información suplementario
B−10 Festo P.BE−MTR−DCI−IO−ES es 0501a
B.2.3 Grupo 2xxx
Object 2032 Selecionar un registro de posición a través del número deregistro.
El número de registro es guardado como destino para opera�ciones de escritura y lectura en los siguientes objetos:
� Object 20E0: position_table_element
� Object 607A: target_position
� Object 6081: profile_velocity
Nombre Clase IIII SS Tipo Acc
position_number VAR 2032 01 UINT8 RW
Subindex 01 Número de registro de lectura o escritura
Valor Comentario
<0> No utilizarlo � Reservado para CANopen
<1> No utilizarlo � Reservado para CANopen
<2> Registro posición 0
<3> Registro posición 1
<4> Registro posición 3
<5> Registro posición 4
... ...
<16> Registro posición 15
<17> Puesta en origen (homing) (registro posición 16)
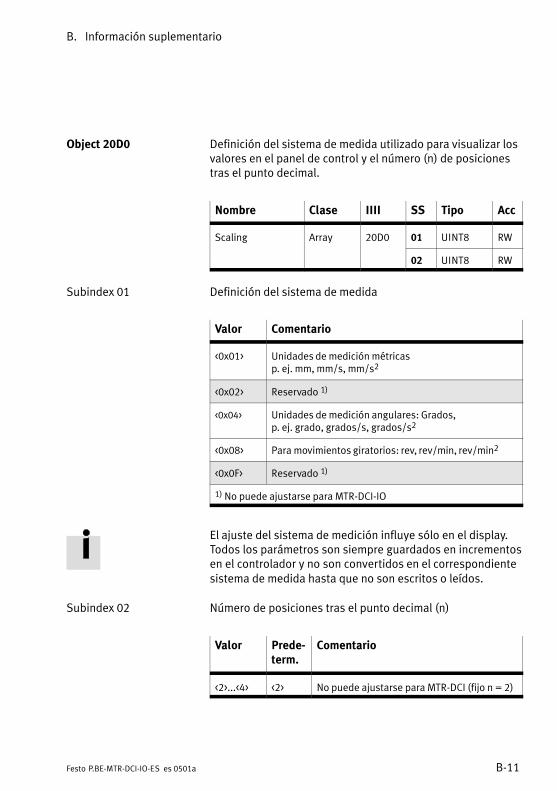
B. Información suplementario
B−11Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 20D0 Definición del sistema de medida utilizado para visualizar losvalores en el panel de control y el número (n) de posicionestras el punto decimal.
Nombre Clase IIII SS Tipo Acc
Scaling Array 20D0 01 UINT8 RW
02 UINT8 RW
Subindex 01 Definición del sistema de medida
Valor Comentario
<0x01> Unidades de medición métricas p. ej. mm, mm/s, mm/s2
<0x02> Reservado 1)
<0x04> Unidades de medición angulares: Grados, p. ej. grado, grados/s, grados/s2
<0x08> Para movimientos giratorios: rev, rev/min, rev/min2
<0x0F> Reservado 1)
1) No puede ajustarse para MTR−DCI−IO
El ajuste del sistema de medición influye sólo en el display.Todos los parámetros son siempre guardados en incrementosen el controlador y no son convertidos en el correspondientesistema de medida hasta que no son escritos o leídos.
Subindex 02 Número de posiciones tras el punto decimal (n)
Valor Prede�term.
Comentario
<2>...<4> <2> No puede ajustarse para MTR−DCI (fijo n = 2)
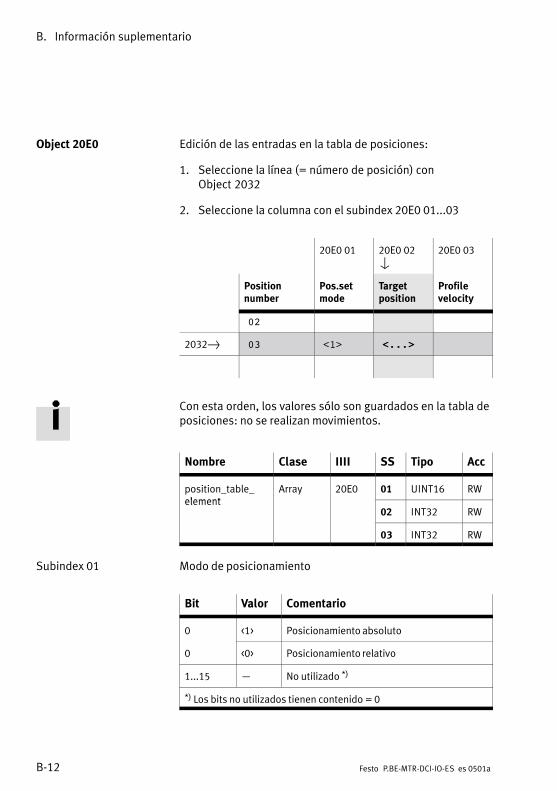
B. Información suplementario
B−12 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 20E0 Edición de las entradas en la tabla de posiciones:
1. Seleccione la línea (= número de posición) conObject�2032
2. Seleccione la columna con el subindex 20E0 01...03
20E0 01 20E0 02V
20E0 03
Positionnumber
Pos.setmode
Targetposition
Profilevelocity
02
2032} 03 <1> <...>
Con esta orden, los valores sólo son guardados en la tabla deposiciones: no se realizan movimientos.
Nombre Clase IIII SS Tipo Acc
position_table_element
Array 20E0 01 UINT16 RWelement
02 INT32 RW
03 INT32 RW
Subindex 01 Modo de posicionamiento
Bit Valor Comentario
0 <1> Posicionamiento absoluto
0 <0> Posicionamiento relativo
1...15 No utilizado *)
*) Los bits no utilizados tienen contenido = 0
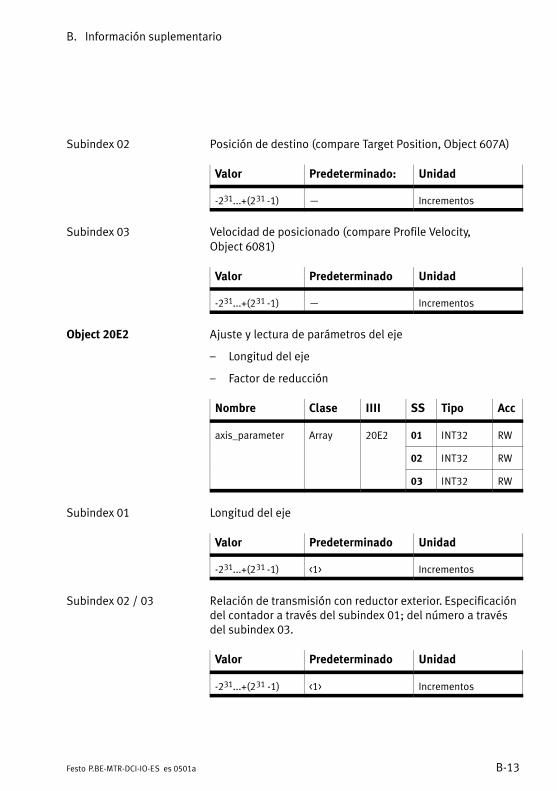
B. Información suplementario
B−13Festo P.BE−MTR−DCI−IO−ES es 0501a
Subindex 02 Posición de destino (compare Target Position, Object 607A)
Valor Predeterminado: Unidad
−231...+(231 −1) Incrementos
Subindex 03 Velocidad de posicionado (compare Profile Velocity, Object 6081)
Valor Predeterminado Unidad
−231...+(231 −1) Incrementos
Object 20E2 Ajuste y lectura de parámetros del eje
� Longitud del eje
� Factor de reducción
Nombre Clase IIII SS Tipo Acc
axis_parameter Array 20E2 01 INT32 RW
02 INT32 RW
03 INT32 RW
Subindex 01 Longitud del eje
Valor Predeterminado Unidad
−231...+(231 −1) <1> Incrementos
Subindex 02 / 03 Relación de transmisión con reductor exterior. Especificacióndel contador a través del subindex 01; del número a travésdel subindex 03.
Valor Predeterminado Unidad
−231...+(231 −1) <1> Incrementos
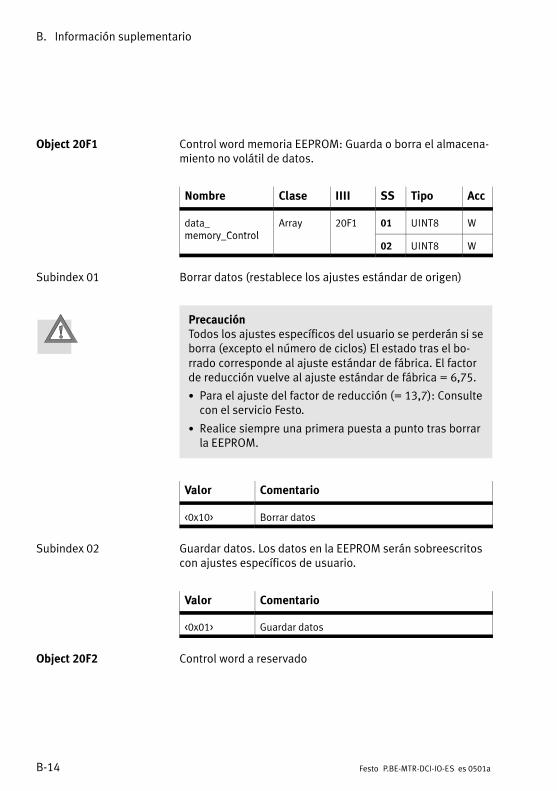
B. Información suplementario
B−14 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 20F1 Control word memoria EEPROM: Guarda o borra el almacena�miento no volátil de datos.
Nombre Clase IIII SS Tipo Acc
data_memory Control
Array 20F1 01 UINT8 Wmemory_Control
02 UINT8 W
Subindex 01 Borrar datos (restablece los ajustes estándar de origen)
PrecauciónTodos los ajustes específicos del usuario se perderán si seborra (excepto el número de ciclos) El estado tras el bo�rrado corresponde al ajuste estándar de fábrica. El factorde reducción vuelve al ajuste estándar de fábrica = 6,75.
· Para el ajuste del factor de reducción (= 13,7): Consultecon el servicio Festo.
· Realice siempre una primera puesta a punto tras borrarla EEPROM.
Valor Comentario
<0x10> Borrar datos
Subindex 02 Guardar datos. Los datos en la EEPROM serán sobreescritoscon ajustes específicos de usuario.
Valor Comentario
<0x01> Guardar datos
Object 20F2 Control word a reservado
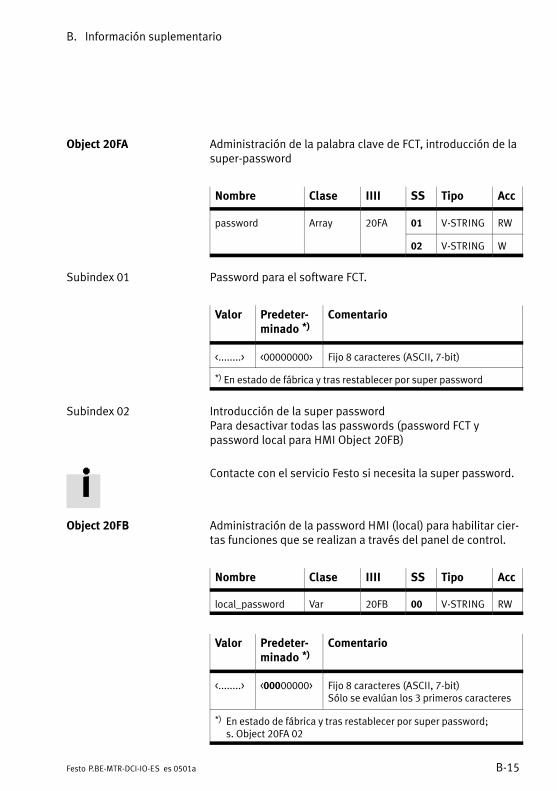
B. Información suplementario
B−15Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 20FA Administración de la palabra clave de FCT, introducción de lasuper−password
Nombre Clase IIII SS Tipo Acc
password Array 20FA 01 V−STRING RW
02 V−STRING W
Subindex 01 Password para el software FCT.
Valor Predeter�minado *)
Comentario
<........> <00000000> Fijo 8 caracteres (ASCII, 7−bit)
*) En estado de fábrica y tras restablecer por super password
Subindex 02 Introducción de la super passwordPara desactivar todas las passwords (password FCT ypassword local para HMI Object 20FB)
Contacte con el servicio Festo si necesita la super password.
Object 20FB Administración de la password HMI (local) para habilitar cier�tas funciones que se realizan a través del panel de control.
Nombre Clase IIII SS Tipo Acc
local_password Var 20FB 00 V−STRING RW
Valor Predeter�minado *)
Comentario
<........> <00000000> Fijo 8 caracteres (ASCII, 7−bit)Sólo se evalúan los 3 primeros caracteres
*) En estado de fábrica y tras restablecer por super password; s. Object 20FA 02
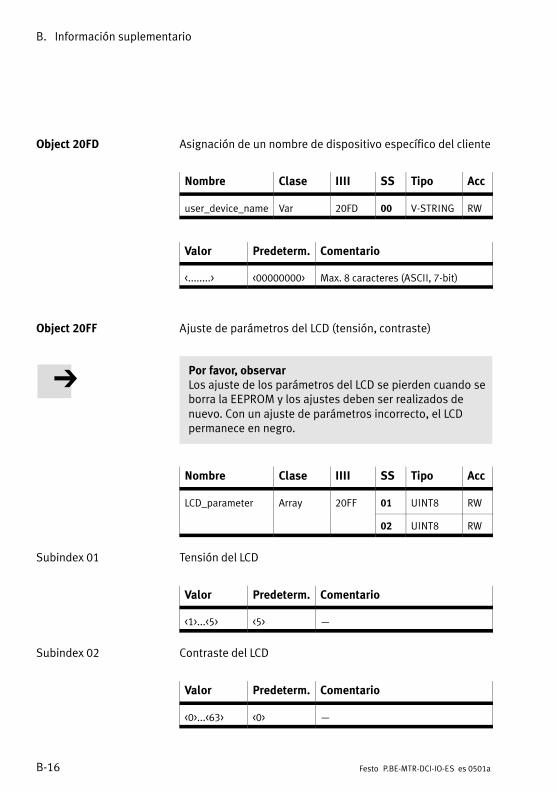
B. Información suplementario
B−16 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 20FD Asignación de un nombre de dispositivo específico del cliente
Nombre Clase IIII SS Tipo Acc
user_device_name Var 20FD 00 V−STRING RW
Valor Predeterm. Comentario
<........> <00000000> Max. 8 caracteres (ASCII, 7−bit)
Object 20FF Ajuste de parámetros del LCD (tensión, contraste)
Por favor, observarLos ajuste de los parámetros del LCD se pierden cuando seborra la EEPROM y los ajustes deben ser realizados denuevo. Con un ajuste de parámetros incorrecto, el LCDpermanece en negro.
Nombre Clase IIII SS Tipo Acc
LCD_parameter Array 20FF 01 UINT8 RW
02 UINT8 RW
Subindex 01 Tensión del LCD
Valor Predeterm. Comentario
<1>...<5> <5>
Subindex 02 Contraste del LCD
Valor Predeterm. Comentario
<0>...<63> <0>
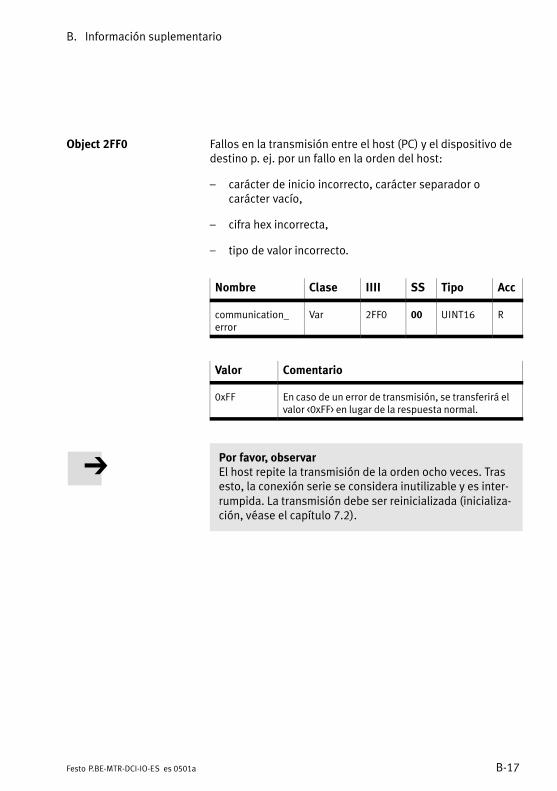
B. Información suplementario
B−17Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 2FF0 Fallos en la transmisión entre el host (PC) y el dispositivo dedestino p. ej. por un fallo en la orden del host:
� carácter de inicio incorrecto, carácter separador ocarácter vacío,
� cifra hex incorrecta,
� tipo de valor incorrecto.
Nombre Clase IIII SS Tipo Acc
communication_error
Var 2FF0 00 UINT16 R
Valor Comentario
0xFF En caso de un error de transmisión, se transferirá elvalor <0xFF> en lugar de la respuesta normal.
Por favor, observarEl host repite la transmisión de la orden ocho veces. Trasesto, la conexión serie se considera inutilizable y es inter�rumpida. La transmisión debe ser reinicializada (inicializa�ción, véase el capítulo 7.2).
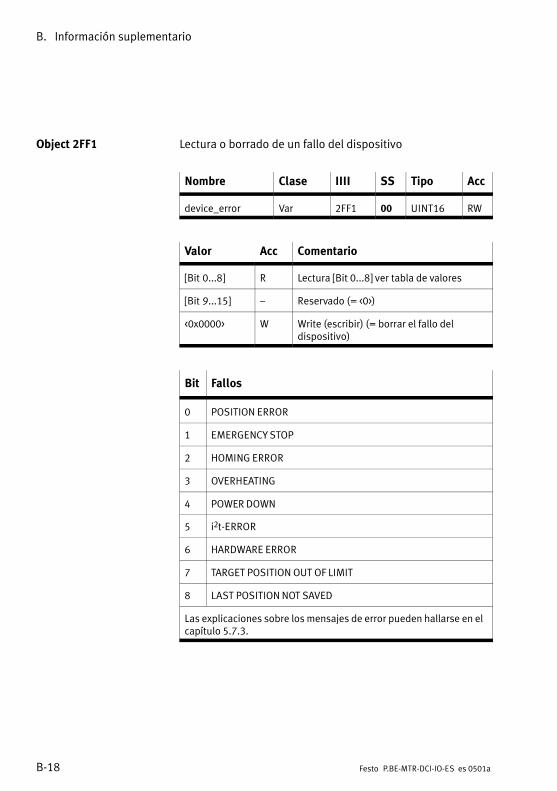
B. Información suplementario
B−18 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 2FF1 Lectura o borrado de un fallo del dispositivo
Nombre Clase IIII SS Tipo Acc
device_error Var 2FF1 00 UINT16 RW
Valor Acc Comentario
[Bit 0...8] R Lectura [Bit 0...8] ver tabla de valores
[Bit 9...15] � Reservado (= <0>)
<0x0000> W Write (escribir) (= borrar el fallo deldispositivo)
Bit Fallos
0 POSITION ERROR
1 EMERGENCY STOP
2 HOMING ERROR
3 OVERHEATING
4 POWER DOWN
5 i2t−ERROR
6 HARDWARE ERROR
7 TARGET POSITION OUT OF LIMIT
8 LAST POSITION NOT SAVED
Las explicaciones sobre los mensajes de error pueden hallarse en elcapítulo 5.7.3.
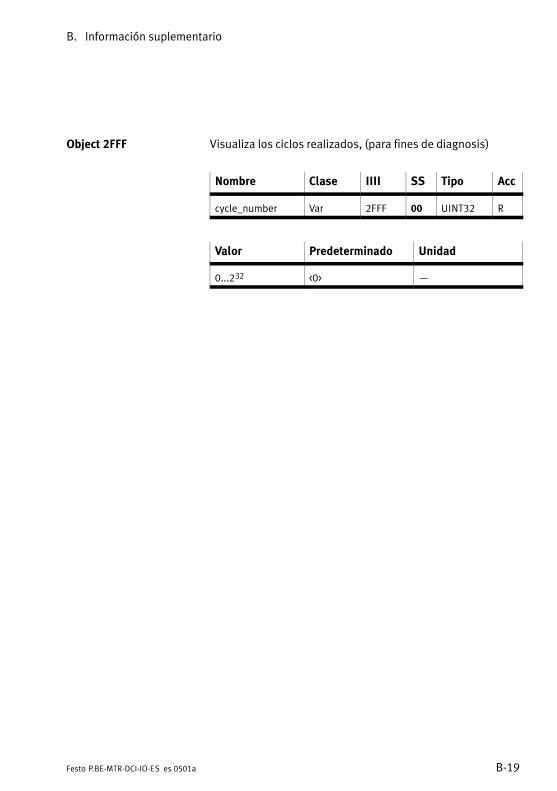
B. Información suplementario
B−19Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 2FFF Visualiza los ciclos realizados, (para fines de diagnosis)
Nombre Clase IIII SS Tipo Acc
cycle_number Var 2FFF 00 UINT32 R
Valor Predeterminado Unidad
0...232 <0>
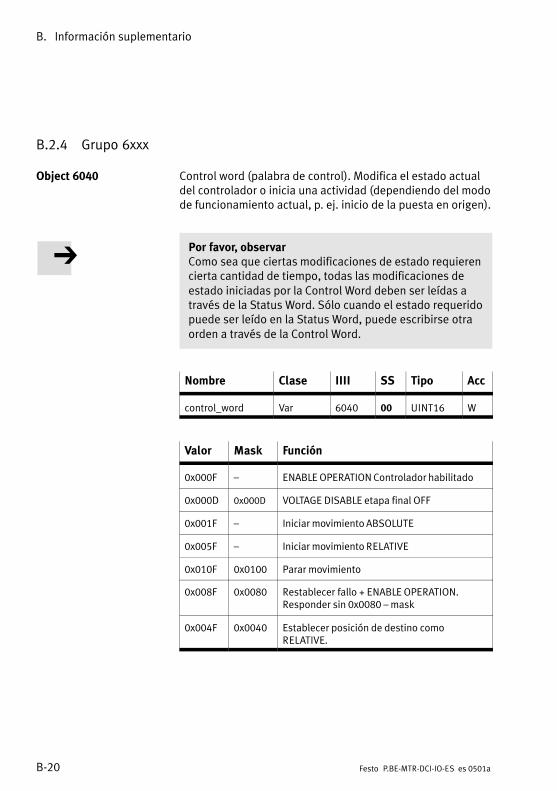
B. Información suplementario
B−20 Festo P.BE−MTR−DCI−IO−ES es 0501a
B.2.4 Grupo 6xxx
Object 6040 Control word (palabra de control). Modifica el estado actualdel controlador o inicia una actividad (dependiendo del modode funcionamiento actual, p. ej. inicio de la puesta en origen).
Por favor, observarComo sea que ciertas modificaciones de estado requierencierta cantidad de tiempo, todas las modificaciones deestado iniciadas por la Control Word deben ser leídas através de la Status Word. Sólo cuando el estado requeridopuede ser leído en la Status Word, puede escribirse otraorden a través de la Control Word.
Nombre Clase IIII SS Tipo Acc
control_word Var 6040 00 UINT16 W
Valor Mask Función
0x000F � ENABLE OPERATION Controlador habilitado
0x000D 0x000D VOLTAGE DISABLE etapa final OFF
0x001F � Iniciar movimiento ABSOLUTE
0x005F � Iniciar movimiento RELATIVE
0x010F 0x0100 Parar movimiento
0x008F 0x0080 Restablecer fallo + ENABLE OPERATION. Responder sin 0x0080 � mask
0x004F 0x0040 Establecer posición de destino comoRELATIVE.
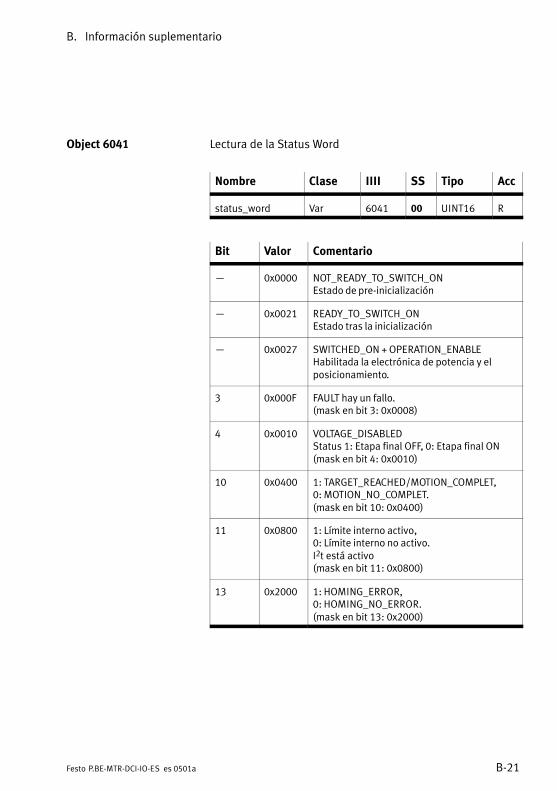
B. Información suplementario
B−21Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6041 Lectura de la Status Word
Nombre Clase IIII SS Tipo Acc
status_word Var 6041 00 UINT16 R
Bit Valor Comentario
0x0000 NOT_READY_TO_SWITCH_ONEstado de pre−inicialización
0x0021 READY_TO_SWITCH_ONEstado tras la inicialización
0x0027 SWITCHED_ON + OPERATION_ENABLE Habilitada la electrónica de potencia y elposicionamiento.
3 0x000F FAULT hay un fallo. (mask en bit 3: 0x0008)
4 0x0010 VOLTAGE_DISABLED Status 1: Etapa final OFF, 0: Etapa final ON(mask en bit 4: 0x0010)
10 0x0400 1: TARGET_REACHED/MOTION_COMPLET, 0: MOTION_NO_COMPLET.(mask en bit 10: 0x0400)
11 0x0800 1: Límite interno activo,0: Límite interno no activo. I2t está activo (mask en bit 11: 0x0800)
13 0x2000 1: HOMING_ERROR, 0: HOMING_NO_ERROR. (mask en bit 13: 0x2000)
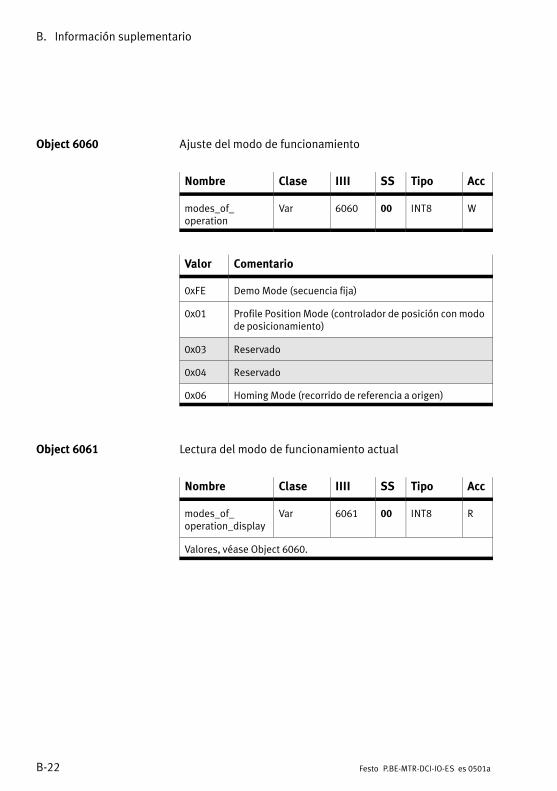
B. Información suplementario
B−22 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6060 Ajuste del modo de funcionamiento
Nombre Clase IIII SS Tipo Acc
modes_of_operation
Var 6060 00 INT8 W
Valor Comentario
0xFE Demo Mode (secuencia fija)
0x01 Profile Position Mode (controlador de posición con modode posicionamiento)
0x03 Reservado
0x04 Reservado
0x06 Homing Mode (recorrido de referencia a origen)
Object 6061 Lectura del modo de funcionamiento actual
Nombre Clase IIII SS Tipo Acc
modes_of_operation_display
Var 6061 00 INT8 R
Valores, véase Object 6060.
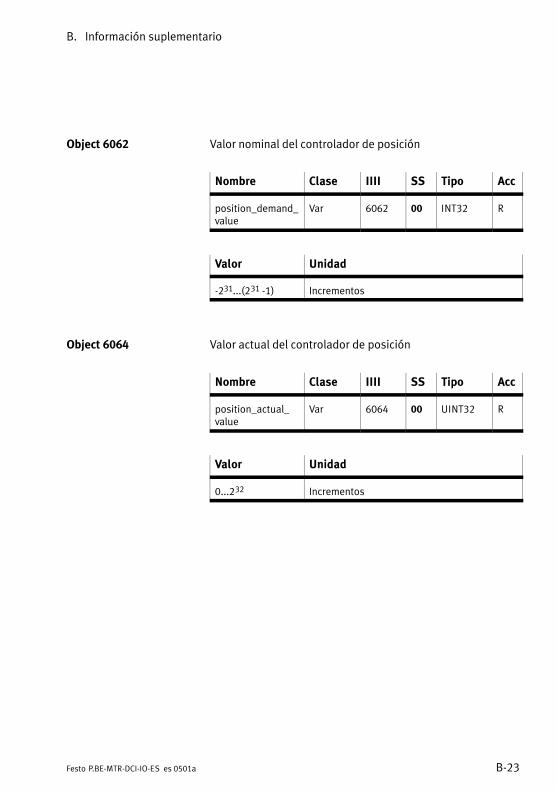
B. Información suplementario
B−23Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6062 Valor nominal del controlador de posición
Nombre Clase IIII SS Tipo Acc
position_demand_value
Var 6062 00 INT32 R
Valor Unidad
−231...(231 −1) Incrementos
Object 6064 Valor actual del controlador de posición
Nombre Clase IIII SS Tipo Acc
position_actual_value
Var 6064 00 UINT32 R
Valor Unidad
0...232 Incrementos
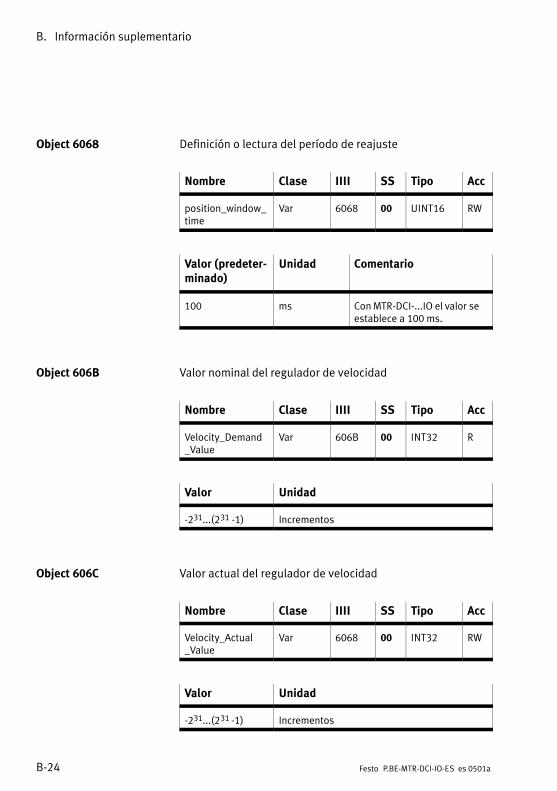
B. Información suplementario
B−24 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6068 Definición o lectura del período de reajuste
Nombre Clase IIII SS Tipo Acc
position_window_time
Var 6068 00 UINT16 RW
Valor (predeter�minado)
Unidad Comentario
100 ms Con MTR−DCI−...IO el valor seestablece a 100 ms.
Object 606B Valor nominal del regulador de velocidad
Nombre Clase IIII SS Tipo Acc
Velocity_Demand_Value
Var 606B 00 INT32 R
Valor Unidad
−231...(231 −1) Incrementos
Object 606C Valor actual del regulador de velocidad
Nombre Clase IIII SS Tipo Acc
Velocity_Actual_Value
Var 6068 00 INT32 RW
Valor Unidad
−231...(231 −1) Incrementos
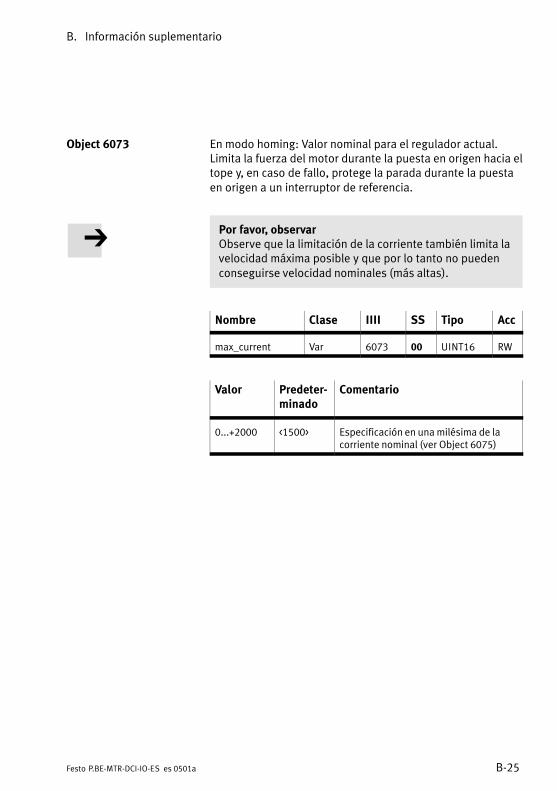
B. Información suplementario
B−25Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6073 En modo homing: Valor nominal para el regulador actual.Limita la fuerza del motor durante la puesta en origen hacia eltope y, en caso de fallo, protege la parada durante la puestaen origen a un interruptor de referencia.
Por favor, observarObserve que la limitación de la corriente también limita lavelocidad máxima posible y que por lo tanto no puedenconseguirse velocidad nominales (más altas).
Nombre Clase IIII SS Tipo Acc
max_current Var 6073 00 UINT16 RW
Valor Predeter�minado
Comentario
0...+2000 <1500> Especificación en una milésima de lacorriente nominal (ver Object 6075)
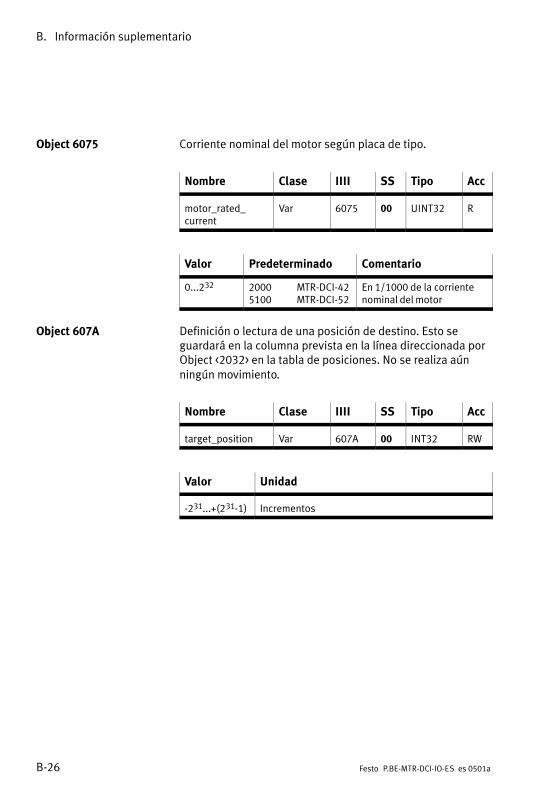
B. Información suplementario
B−26 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6075 Corriente nominal del motor según placa de tipo.
Nombre Clase IIII SS Tipo Acc
motor_rated_current
Var 6075 00 UINT32 R
Valor Predeterminado Comentario
0...232 2000 MTR−DCI−425100 MTR−DCI−52
En 1/1000 de la corrientenominal del motor
Object 607A Definición o lectura de una posición de destino. Esto seguardará en la columna prevista en la línea direccionada porObject <2032> en la tabla de posiciones. No se realiza aúnningún movimiento.
Nombre Clase IIII SS Tipo Acc
target_position Var 607A 00 INT32 RW
Valor Unidad
−231...+(231−1) Incrementos
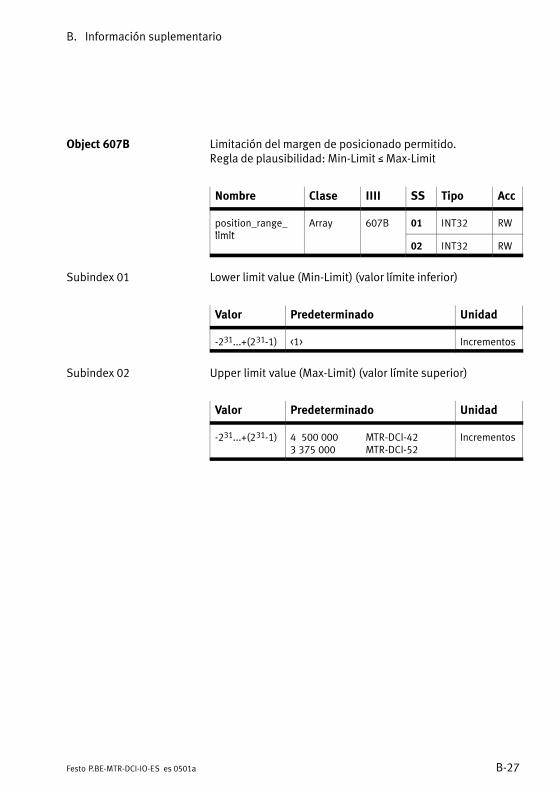
B. Información suplementario
B−27Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 607B Limitación del margen de posicionado permitido. Regla de plausibilidad: Min−Limit � Max−Limit
Nombre Clase IIII SS Tipo Acc
position_range_limit
Array 607B 01 INT32 RWlimit
02 INT32 RW
Subindex 01 Lower limit value (Min−Limit) (valor límite inferior)
Valor Predeterminado Unidad
−231...+(231−1) <1> Incrementos
Subindex 02 Upper limit value (Max−Limit) (valor límite superior)
Valor Predeterminado Unidad
−231...+(231−1) 4�500�000 MTR−DCI−423�375�000 MTR−DCI−52
Incrementos
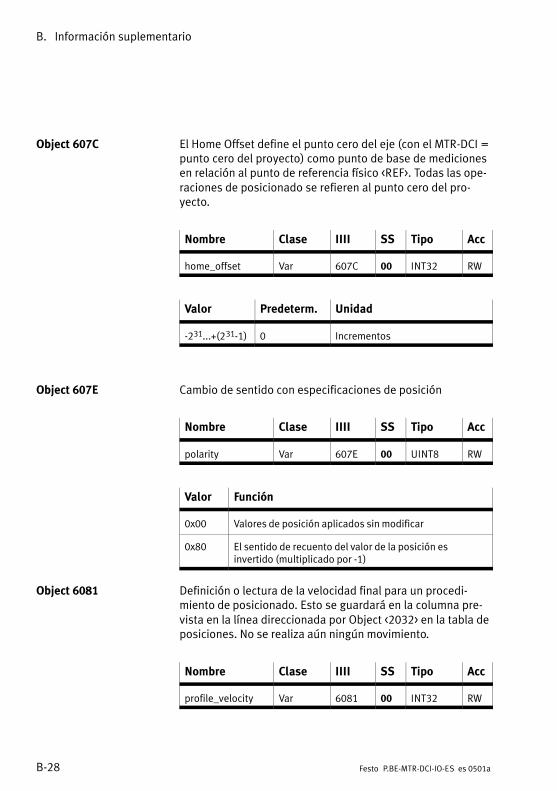
B. Información suplementario
B−28 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 607C El Home Offset define el punto cero del eje (con el MTR−DCI =punto cero del proyecto) como punto de base de medicionesen relación al punto de referencia físico <REF>. Todas las ope�raciones de posicionado se refieren al punto cero del pro�yecto.
Nombre Clase IIII SS Tipo Acc
home_offset Var 607C 00 INT32 RW
Valor Predeterm. Unidad
−231...+(231−1) 0 Incrementos
Object 607E Cambio de sentido con especificaciones de posición
Nombre Clase IIII SS Tipo Acc
polarity Var 607E 00 UINT8 RW
Valor Función
0x00 Valores de posición aplicados sin modificar
0x80 El sentido de recuento del valor de la posición esinvertido (multiplicado por −1)
Object 6081 Definición o lectura de la velocidad final para un procedi�miento de posicionado. Esto se guardará en la columna pre�vista en la línea direccionada por Object <2032> en la tabla deposiciones. No se realiza aún ningún movimiento.
Nombre Clase IIII SS Tipo Acc
profile_velocity Var 6081 00 INT32 RW
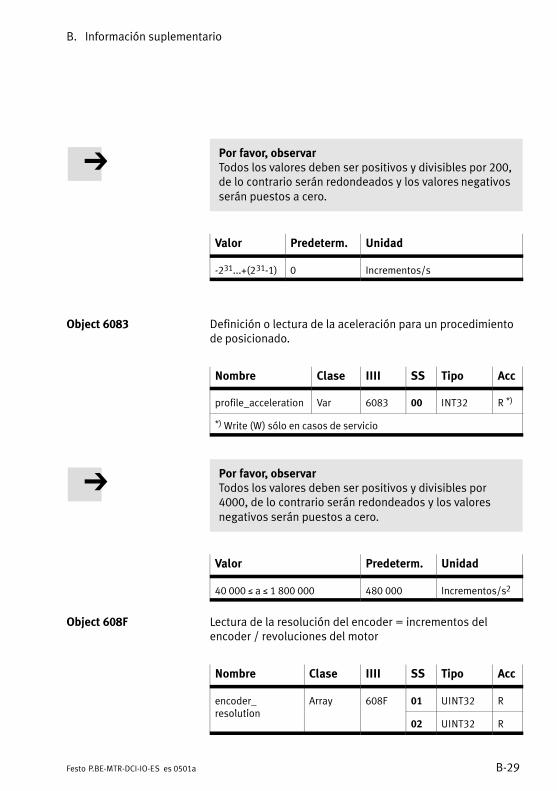
B. Información suplementario
B−29Festo P.BE−MTR−DCI−IO−ES es 0501a
Por favor, observarTodos los valores deben ser positivos y divisibles por 200,de lo contrario serán redondeados y los valores negativosserán puestos a cero.
Valor Predeterm. Unidad
−231...+(231−1) 0 Incrementos/s
Object 6083 Definición o lectura de la aceleración para un procedimientode posicionado.
Nombre Clase IIII SS Tipo Acc
profile_acceleration Var 6083 00 INT32 R *)
*) Write (W) sólo en casos de servicio
Por favor, observarTodos los valores deben ser positivos y divisibles por4000, de lo contrario serán redondeados y los valoresnegativos serán puestos a cero.
Valor Predeterm. Unidad
40 000 � a � 1 800 000 480 000 Incrementos/s2
Object 608F Lectura de la resolución del encoder = incrementos delencoder / revoluciones del motor
Nombre Clase IIII SS Tipo Acc
encoder_resolution
Array 608F 01 UINT32 Rresolution
02 UINT32 R
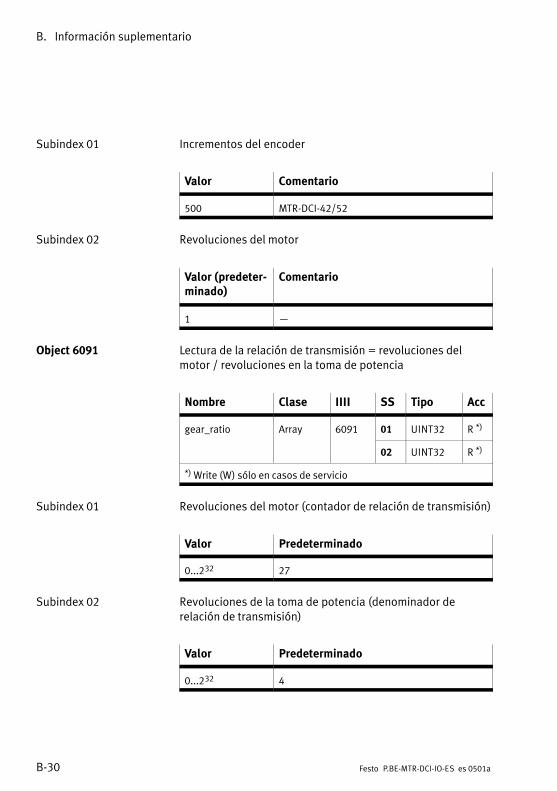
B. Información suplementario
B−30 Festo P.BE−MTR−DCI−IO−ES es 0501a
Subindex 01 Incrementos del encoder
Valor Comentario
500 MTR−DCI−42/52
Subindex 02 Revoluciones del motor
Valor (predeter�minado)
Comentario
1
Object 6091 Lectura de la relación de transmisión = revoluciones delmotor / revoluciones en la toma de potencia
Nombre Clase IIII SS Tipo Acc
gear_ratio Array 6091 01 UINT32 R *)
02 UINT32 R *)
*) Write (W) sólo en casos de servicio
Subindex 01 Revoluciones del motor (contador de relación de transmisión)
Valor Predeterminado
0...232 27
Subindex 02 Revoluciones de la toma de potencia (denominador derelación de transmisión)
Valor Predeterminado
0...232 4
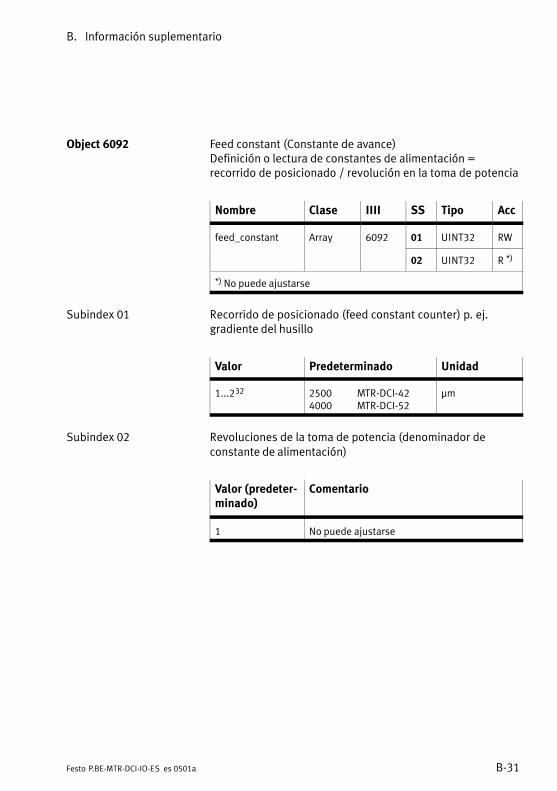
B. Información suplementario
B−31Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6092 Feed constant (Constante de avance)Definición o lectura de constantes de alimentación =recorrido de posicionado / revolución en la toma de potencia
Nombre Clase IIII SS Tipo Acc
feed_constant Array 6092 01 UINT32 RW
02 UINT32 R *)
*) No puede ajustarse
Subindex 01 Recorrido de posicionado (feed constant counter) p. ej.gradiente del husillo
Valor Predeterminado Unidad
1...232 2500 MTR−DCI−424000 MTR−DCI−52
ìm
Subindex 02 Revoluciones de la toma de potencia (denominador deconstante de alimentación)
Valor (predeter�minado)
Comentario
1 No puede ajustarse
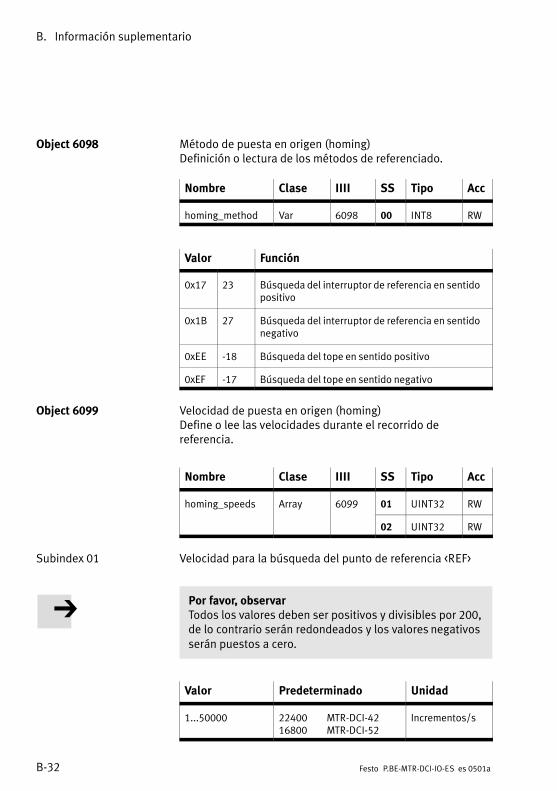
B. Información suplementario
B−32 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6098 Método de puesta en origen (homing)Definición o lectura de los métodos de referenciado.
Nombre Clase IIII SS Tipo Acc
homing_method Var 6098 00 INT8 RW
Valor Función
0x17 23 Búsqueda del interruptor de referencia en sentidopositivo
0x1B 27 Búsqueda del interruptor de referencia en sentidonegativo
0xEE −18 Búsqueda del tope en sentido positivo
0xEF −17 Búsqueda del tope en sentido negativo
Object 6099 Velocidad de puesta en origen (homing) Define o lee las velocidades durante el recorrido dereferencia.
Nombre Clase IIII SS Tipo Acc
homing_speeds Array 6099 01 UINT32 RW
02 UINT32 RW
Subindex 01 Velocidad para la búsqueda del punto de referencia <REF>
Por favor, observarTodos los valores deben ser positivos y divisibles por 200,de lo contrario serán redondeados y los valores negativosserán puestos a cero.
Valor Predeterminado Unidad
1...50000 22400 MTR−DCI−4216800 MTR−DCI−52
Incrementos/s
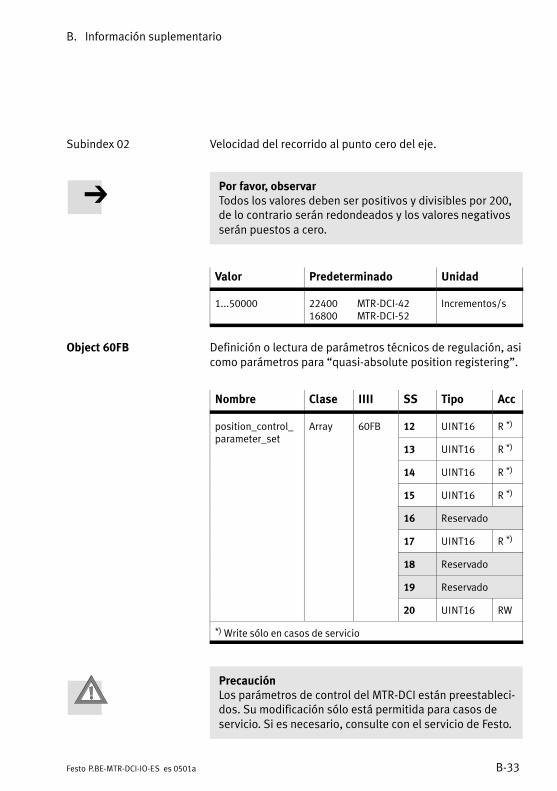
B. Información suplementario
B−33Festo P.BE−MTR−DCI−IO−ES es 0501a
Subindex 02 Velocidad del recorrido al punto cero del eje.
Por favor, observarTodos los valores deben ser positivos y divisibles por 200,de lo contrario serán redondeados y los valores negativosserán puestos a cero.
Valor Predeterminado Unidad
1...50000 22400 MTR−DCI−4216800 MTR−DCI−52
Incrementos/s
Object 60FB Definición o lectura de parámetros técnicos de regulación, asicomo parámetros para �quasi−absolute position registering".
Nombre Clase IIII SS Tipo Acc
position_control_parameter set
Array 60FB 12 UINT16 R *)
parameter_set13 UINT16 R *)
14 UINT16 R *)
15 UINT16 R *)
16 Reservado
17 UINT16 R *)
18 Reservado
19 Reservado
20 UINT16 RW
*) Write sólo en casos de servicio
PrecauciónLos parámetros de control del MTR−DCI están preestableci�dos. Su modificación sólo está permitida para casos deservicio. Si es necesario, consulte con el servicio de Festo.
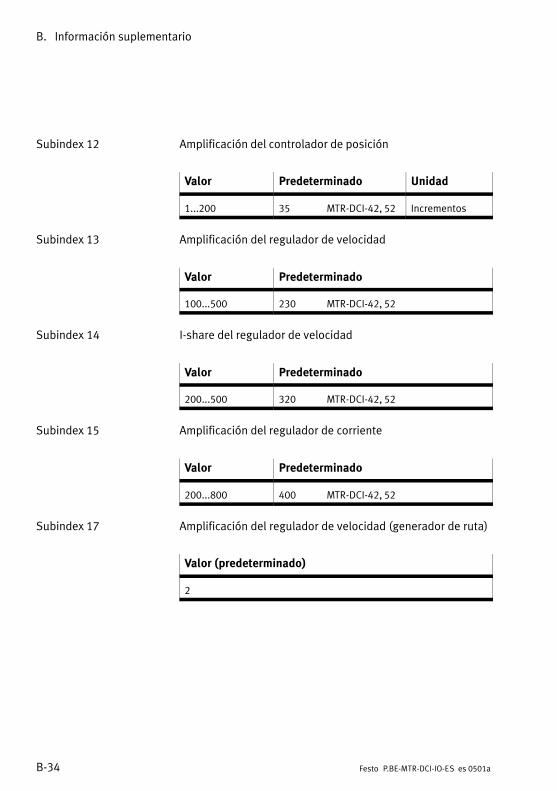
B. Información suplementario
B−34 Festo P.BE−MTR−DCI−IO−ES es 0501a
Subindex 12 Amplificación del controlador de posición
Valor Predeterminado Unidad
1...200 35 MTR−DCI−42, 52 Incrementos
Subindex 13 Amplificación del regulador de velocidad
Valor Predeterminado
100...500 230 MTR−DCI−42, 52
Subindex 14 I−share del regulador de velocidad
Valor Predeterminado
200...500 320 MTR−DCI−42, 52
Subindex 15 Amplificación del regulador de corriente
Valor Predeterminado
200...800 400 MTR−DCI−42, 52
Subindex 17 Amplificación del regulador de velocidad (generador de ruta)
Valor (predeterminado)
2
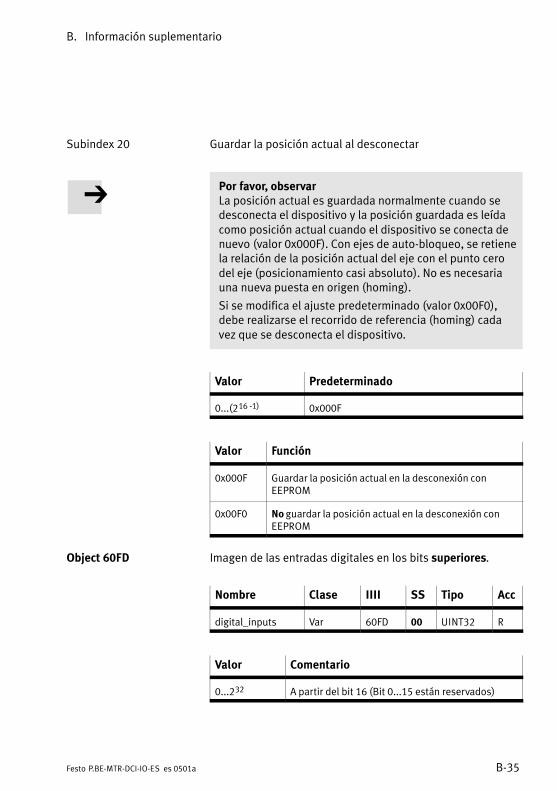
B. Información suplementario
B−35Festo P.BE−MTR−DCI−IO−ES es 0501a
Subindex 20 Guardar la posición actual al desconectar
Por favor, observarLa posición actual es guardada normalmente cuando sedesconecta el dispositivo y la posición guardada es leídacomo posición actual cuando el dispositivo se conecta denuevo (valor 0x000F). Con ejes de auto−bloqueo, se retienela relación de la posición actual del eje con el punto cerodel eje (posicionamiento casi absoluto). No es necesariauna nueva puesta en origen (homing).
Si se modifica el ajuste predeterminado (valor 0x00F0),debe realizarse el recorrido de referencia (homing) cadavez que se desconecta el dispositivo.
Valor Predeterminado
0...(216 −1) 0x000F
Valor Función
0x000F Guardar la posición actual en la desconexión conEEPROM
0x00F0 No guardar la posición actual en la desconexión conEEPROM
Object 60FD Imagen de las entradas digitales en los bits superiores.
Nombre Clase IIII SS Tipo Acc
digital_inputs Var 60FD 00 UINT32 R
Valor Comentario
0...232 A partir del bit 16 (Bit 0...15 están reservados)
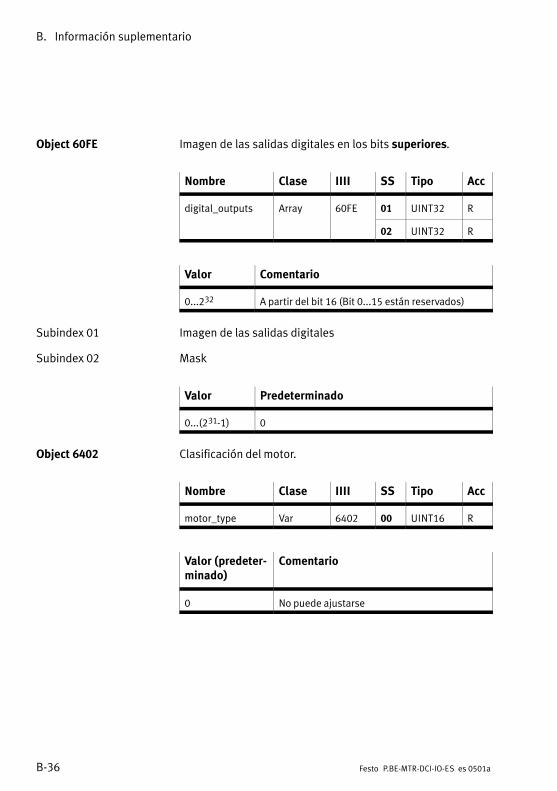
B. Información suplementario
B−36 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 60FE Imagen de las salidas digitales en los bits superiores.
Nombre Clase IIII SS Tipo Acc
digital_outputs Array 60FE 01 UINT32 R
02 UINT32 R
Valor Comentario
0...232 A partir del bit 16 (Bit 0...15 están reservados)
Subindex 01 Imagen de las salidas digitales
Subindex 02 Mask
Valor Predeterminado
0...(231−1) 0
Object 6402 Clasificación del motor.
Nombre Clase IIII SS Tipo Acc
motor_type Var 6402 00 UINT16 R
Valor (predeter�minado)
Comentario
0 No puede ajustarse
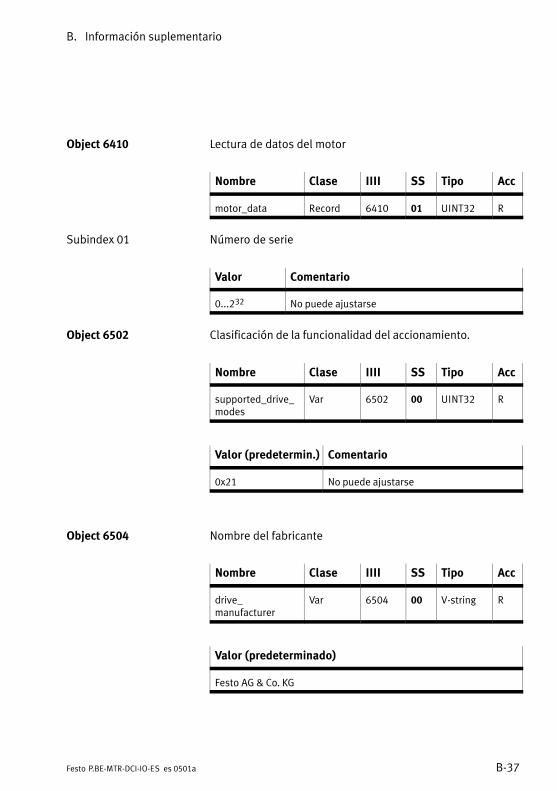
B. Información suplementario
B−37Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6410 Lectura de datos del motor
Nombre Clase IIII SS Tipo Acc
motor_data Record 6410 01 UINT32 R
Subindex 01 Número de serie
Valor Comentario
0...232 No puede ajustarse
Object 6502 Clasificación de la funcionalidad del accionamiento.
Nombre Clase IIII SS Tipo Acc
supported_drive_modes
Var 6502 00 UINT32 R
Valor (predetermin.) Comentario
0x21 No puede ajustarse
Object 6504 Nombre del fabricante
Nombre Clase IIII SS Tipo Acc
drive_manufacturer
Var 6504 00 V−string R
Valor (predeterminado)
Festo AG & Co. KG
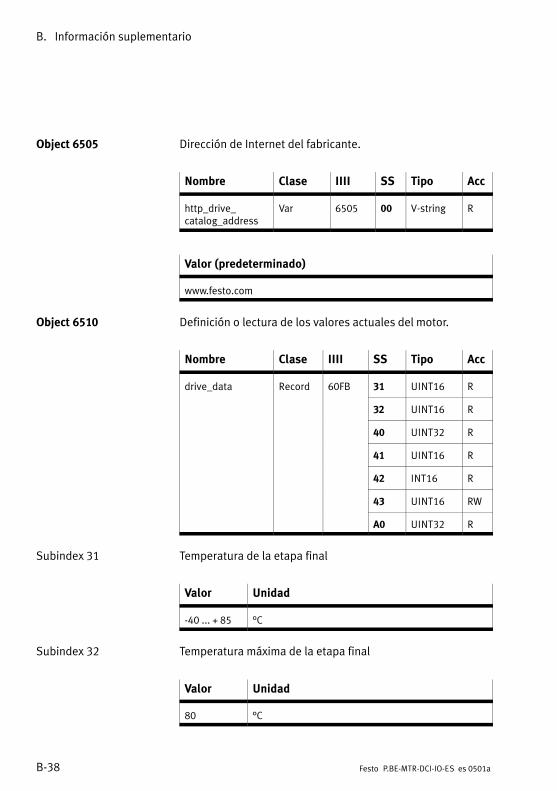
B. Información suplementario
B−38 Festo P.BE−MTR−DCI−IO−ES es 0501a
Object 6505 Dirección de Internet del fabricante.
Nombre Clase IIII SS Tipo Acc
http_drive_catalog_address
Var 6505 00 V−string R
Valor (predeterminado)
www.festo.com
Object 6510 Definición o lectura de los valores actuales del motor.
Nombre Clase IIII SS Tipo Acc
drive_data Record 60FB 31 UINT16 R
32 UINT16 R
40 UINT32 R
41 UINT16 R
42 INT16 R
43 UINT16 RW
A0 UINT32 R
Subindex 31 Temperatura de la etapa final
Valor Unidad
−40 ... + 85 °C
Subindex 32 Temperatura máxima de la etapa final
Valor Unidad
80 °C
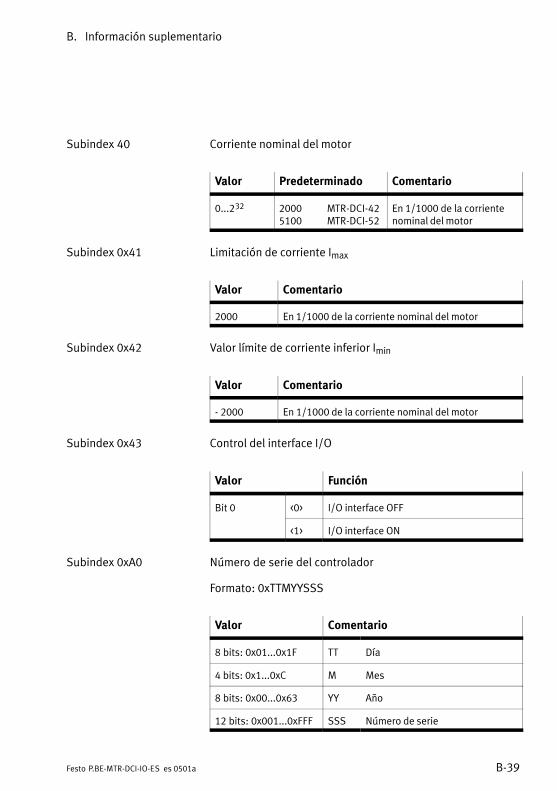
B. Información suplementario
B−39Festo P.BE−MTR−DCI−IO−ES es 0501a
Subindex 40 Corriente nominal del motor
Valor Predeterminado Comentario
0...232 2000 MTR−DCI−425100 MTR−DCI−52
En 1/1000 de la corrientenominal del motor
Subindex 0x41 Limitación de corriente Imax
Valor Comentario
2000 En 1/1000 de la corriente nominal del motor
Subindex 0x42 Valor límite de corriente inferior Imin
Valor Comentario
− 2000 En 1/1000 de la corriente nominal del motor
Subindex 0x43 Control del interface I/O
Valor Función
Bit 0 <0> I/O interface OFF
<1> I/O interface ON
Subindex 0xA0 Número de serie del controlador
Formato: 0xTTMYYSSS
Valor Comentario
8 bits: 0x01...0x1F TT Día
4 bits: 0x1...0xC M Mes
8 bits: 0x00...0x63 YY Año
12 bits: 0x001...0xFFF SSS Número de serie
B. Información suplementario
B−40 Festo P.BE−MTR−DCI−IO−ES es 0501a
B.3 Conversión de las unidades de medida
Hay que definir un sistema de medida especificando los pará�metros del eje eléctrico. Para habilitar una parametrizaciónsimple para diferentes casos de aplicación, el controladorpuede ajustarse a través del panel de control o del FCT deforma que el usuario pueda especificar o leer todas las varia�bles directamente en las unidades deseadas en la salida depotencia, p. ej.:
� Sistema métrico de medida para movimientos lineales(mm, mm/s, mm/s2
� Sistema de medida de ángulos para movimientospuramente rotativos (grados, grados/s, grados/s2) o (rev, rev/s, rev/s2)
� Sistema de medida en pulgadas (inch, inch/s, inch/s2
Cada variable física (posición, velocidad y aceleración) estáadaptada al correspondiente sistema de medición por mediode un factor de conversión.
En el controlador, todos los parámetros son siempre guarda�dos en especificaciones de incrementos (inc. inc/s, inc/s2) yno son convertidos hasta que se escriben o se leen. Para eldisplay, la conversión desde el sistema de base interno en elsistema de medidas (pre)establecido se realiza en el firm�ware; para la representación en la pantalla del PC, en el soft�ware FCT. De esta forma, no es necesario que el usuario rea�lice conversiones al introducir valores o cuando lee valores enel panel de control o el FCT. La transferencia directa de valores a través del interface seriecon órdenes CI se realiza siempre en el sistema de base y seasume que la conversión en incrementos ya se ha realizado.
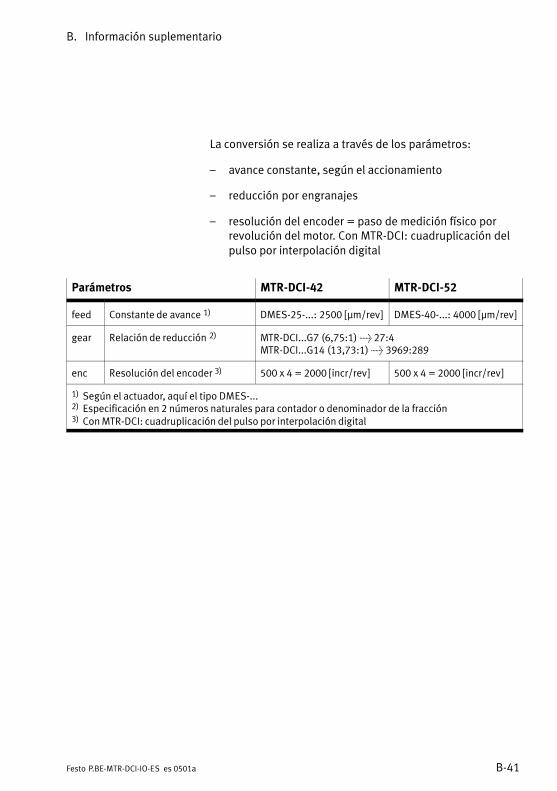
B. Información suplementario
B−41Festo P.BE−MTR−DCI−IO−ES es 0501a
La conversión se realiza a través de los parámetros:
� avance constante, según el accionamiento
� reducción por engranajes
� resolución del encoder = paso de medición físico porrevolución del motor. Con MTR−DCI: cuadruplicación delpulso por interpolación digital
Parámetros MTR−DCI−42 MTR−DCI−52
feed Constante de avance�1) DMES−25−...: 2500 [�m/rev] DMES−40−...: 4000 [�m/rev]
gear Relación de reducción�2) MTR−DCI...G7 (6,75:1) > 27:4MTR−DCI...G14 (13,73:1) > 3969:289
enc Resolución del encoder 3) 500 x 4 = 2000 [incr/rev] 500 x 4 = 2000 [incr/rev]
1) Según el actuador, aquí el tipo DMES−...2) Especificación en 2 números naturales para contador o denominador de la fracción3) Con MTR−DCI: cuadruplicación del pulso por interpolación digital
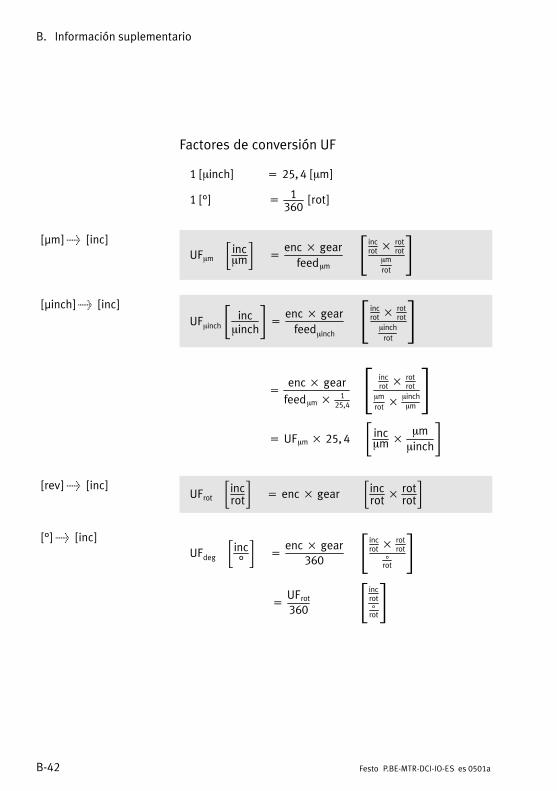
B. Información suplementario
B−42 Festo P.BE−MTR−DCI−IO−ES es 0501a
Factores de conversión UF
1�[minch] � � 25, 4�[mm]
1�[°] � � 1360
� [rot]
[�m] > [inc]UFmm �incmm� � enc� gear
feedmm� �incrot �
rotrot
mmrot
�[�inch] > [inc]
UFminch�� incminch� � enc� gear
feedminch ��incrot �
rotrot
minchrot
�
�� enc� gear
feedmm � 125,4
� incrot �
rotrot
mmrot �
minchmm
� �� UFmm � 25, 4 ��incmm� mm
minch�
[rev] > [inc]UFrot �incrot� � enc� gear �incrot� rot
rot�
[°] > [inc]UFdeg �inc° � � enc� gear
360 ��incrot �
rotrot
°rot�
��� UFrot360
�incrot°rot�
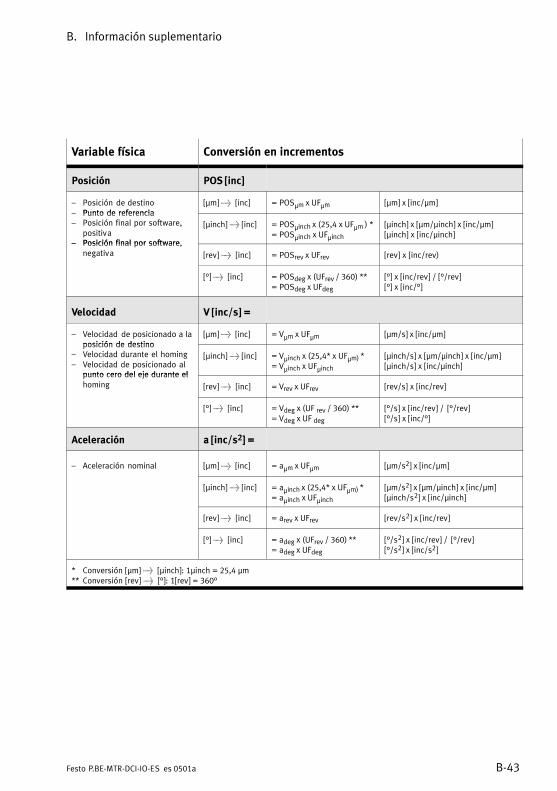
B. Información suplementario
B−43Festo P.BE−MTR−DCI−IO−ES es 0501a
Variable física Conversión en incrementos
Posición POS [inc]
� Posición de destino� Punto de referencia
[�m] > [inc] = POSìm x UFìm [�m] x [inc/�m]� Punto de referencia� Posición final por software,
positiva� Posición final por software
[�inch] > [inc] = POSìinch x (25,4 x UFìm ) *= POSìinch x UFìinch
[�inch] x [�m/�inch] x [inc/�m][�inch] x [inc/�inch]
� Posición final por software,negativa [rev] > [inc] = POSrev x UFrev [rev] x [inc/rev)
[°] > [inc] = POSdeg x (UFrev / 360) **= POSdeg x UFdeg
[°] x [inc/rev] / [°/rev] [°] x [inc/°]
Velocidad V [inc/s] =
� Velocidad de posicionado a laposición de destino
[�m] > [inc] = Vìm x UFìm [ìm/s] x [inc/ìm]posición de destino
� Velocidad durante el homing� Velocidad de posicionado al
punto cero del eje durante el
[�inch] > [inc] = Vìinch x (25,4* x UFìm) *= Vìinch x UFìinch
[ìinch/s] x [ìm/ìinch] x [inc/ìm][ìinch/s] x [inc/ìinch]
punto cero del eje durante elhoming [rev] > [inc] = Vrev x UFrev [rev/s] x [inc/rev]
[°] > [inc] = Vdeg x (UF rev / 360) **= Vdeg x UF deg
[°/s] x [inc/rev] / [°/rev][°/s] x [inc/°]
Aceleración a [inc/s2] =
� Aceleración nominal [�m] > [inc] = aìm x UFìm [ìm/s2] x [inc/ìm]
[�inch] > [inc] = aìinch x (25,4* x UFìm) *= aìinch x UFìinch
[ìm/s2] x [ìm/ìinch] x [inc/ìm][ìinch/s2] x [inc/ìinch]
[rev] > [inc] = arev x UFrev [rev/s2] x [inc/rev]
[°] > [inc] = adeg x (UFrev / 360) **= adeg x UFdeg
[°/s2] x [inc/rev] / [°/rev][°/s2] x [inc/s2]
* Conversión [�m] > [�inch]: 1ìinch = 25,4 ìm** Conversión [rev] > [°]: 1[rev] = 360°

B. Información suplementario
B−44 Festo P.BE−MTR−DCI−IO−ES es 0501a
Indice
C−1Festo P.BE−MTR−DCI−IO−ES es 0501a
Apéndice C

C. Indice
C−2 Festo P.BE−MTR−DCI−IO−ES es 0501a
Contenido
C. Indice C−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C−3Festo P.BE−MTR−DCI−IO−ES es 0501a
A
Absoluta 5−23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Accionamiento XII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Actuador lineal 1−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Alimentación 3−4 , 3−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Área de trabajo 1−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Posición final por software XIII . . . . . . . . . . . . . . . . . . . . . .
C
Cable 1−6 , 3−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Carrera de trabajo 1−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Carrera nominal 1−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Clase de protección 3−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Componentes 1−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Eje eléctrico 1−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Conexión 3−4 , 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control del dispositivo 4−10 , 5−8 , 5−10 . . . . . . . . . . . . . . . . . .
Controlador XII , 3−4 , 3−12 . . . . . . . . . . . . . . . . . . . . . . . . . . .
Coordenadas de referencia 1−10 . . . . . . . . . . . . . . . . . . . . . . .
D
Datos del sistemaDisplay 4−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagnostic 4−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dimensiones 2−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DME XII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dotación del suministro IX . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C−4 Festo P.BE−MTR−DCI−IO−ES es 0501a
E
Eje eléctrico XII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EMC XII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Encoder XII , 1−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Entradas/salidas 4−9 , 5−26 , 6−3 . . . . . . . . . . . . . . . . . . . . . . . Corriente máxima 6−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Nivel de la señal 6−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ESD 3−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Especificaciones técnicas A−3 . . . . . . . . . . . . . . . . . . . . . . . . .
Establecer los parámetros de funcionamiento 5−20 . . . . . . . .
F
Fallos 6−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Eliminación 5−34 , 6−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fallos de transmisión 7−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FCT XII , 1−16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Inicio 5−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Instalación 5−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Sistema de ayuda 1−18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Festo Configuration Tool 1−16 . . . . . . . . . . . . . . . . . . . . . . . . .
Firmware 1−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fuente de alimentación 1−6 , 3−6 . . . . . . . . . . . . . . . . . . . . . . .
Funciones de los botonesResumen 4−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Selección del menú 4−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
G
Grupo al que se destina IX . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Grupo motor XII , 1−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Dimensiones 2−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C−5Festo P.BE−MTR−DCI−IO−ES es 0501a
H
HMI control 4−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Homing mode 1−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Homing param 4−13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I
Incrementos 1−13 , B−40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Instrucciones de seguridad VIII . . . . . . . . . . . . . . . . . . . . . . . .
Instrucciones importantes para el usuario X . . . . . . . . . . . . . .
Interface serie 3−4 , 3−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interruptor de referencia 3−4 , 3−10 . . . . . . . . . . . . . . . . . . . . .
L
LED 5−32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M
Márgenes de memoria 1−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . EEPROM 1−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Memoria FLASH 1−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . RAM 1−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memoria FLASH 1−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Método de funcionamiento 1−8 . . . . . . . . . . . . . . . . . . . . . . . .
Método de referencia 5−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . Interruptor de referencia 5−15 . . . . . . . . . . . . . . . . . . . . . . . Tope fijo 5−13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modo de funcionamiento 1−7 . . . . . . . . . . . . . . . . . . . . . . . . . . Modo Teach XIII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Positioning mode XIII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Recorrido de referencia 5−17 . . . . . . . . . . . . . . . . . . . . . . . .
Modo de posicionamiento XIII . . . . . . . . . . . . . . . . . . . . . . . . .
Modo demo 5−25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C−6 Festo P.BE−MTR−DCI−IO−ES es 0501a
Modo Teach XIII , 4−12 , 4−14 , 5−20 . . . . . . . . . . . . . . . . . . . .
Montaje 2−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Acoplamiento 2−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Fijación directa 2−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
O
Object directory 7−3 , 7−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
P
Panel de control 1−16 , 4−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . Acceso al menú principal 4−6 . . . . . . . . . . . . . . . . . . . . . . . . Funciones de los botones 4−5 . . . . . . . . . . . . . . . . . . . . . . . Sistema de menú 4−6 , 4−7 . . . . . . . . . . . . . . . . . . . . . . . . . .
Parametrización 1−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Sistema de medición 1−12 . . . . . . . . . . . . . . . . . . . . . . . . . .
Parámetros, display 4−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parámetros del eje 4−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Set 4−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parámetros del sistema 4−9 . . . . . . . . . . . . . . . . . . . . . . . . . . .
PARO DE EMERGENCIA 1−14 . . . . . . . . . . . . . . . . . . . . . . . . . .
Password 4−15 , 5−27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ajuste 4−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Enter 4−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Modificar/Desactivar 4−16 . . . . . . . . . . . . . . . . . . . . . . . . . .
PLC XIII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Posición final por software XIII , 1−11 , 5−20 . . . . . . . . . . . . . . Negativa XIII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Positiva XIII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Position set XIII , 1−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Realización 4−17 , 6−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Position set tableCompilar 4−14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Indicación 4−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Realización 4−19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C−7Festo P.BE−MTR−DCI−IO−ES es 0501a
PositioningPosition set 1−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Procedimiento de acceso 7−3 . . . . . . . . . . . . . . . . . . . . . . . . .
Profile position mode XIII , 1−7 . . . . . . . . . . . . . . . . . . . . . . . . .
Programar posiciones de destino 5−23 . . . . . . . . . . . . . . . . . .
Protocolo de transmisión 7−5 . . . . . . . . . . . . . . . . . . . . . . . . . .
Puesta a puntoCon FCT 5−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Con panel de control 5−10 . . . . . . . . . . . . . . . . . . . . . . . . . . Posibilidades 1−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Preparaciones 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Proceda como sigue 5−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Punto cero del eje XIII , 1−10 , 5−20 . . . . . . . . . . . . . . . . . . . . .
Punto cero del proyecto XIII , 1−10 . . . . . . . . . . . . . . . . . . . . .
Punto de referencia 1−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Q
Quasi−absolute position registering XIV . . . . . . . . . . . . . . . . .
R
RAM 1−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Recorrido de referencia XIV . . . . . . . . . . . . . . . . . . . . . . . . . . . Ajuste de parámetros 4−13 . . . . . . . . . . . . . . . . . . . . . . . . . Inicio 5−18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parámetros 5−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Realización 4−18 , 5−17 , 6−5 . . . . . . . . . . . . . . . . . . . . . . . . .
Referencia XIV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Interruptor de referencia XII , 1−6 . . . . . . . . . . . . . . . . . . . . Método de referencia XIII . . . . . . . . . . . . . . . . . . . . . . . . . . . Punto de referencia XIV . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Registro de la posición casi absoluta 1−8 , 5−27 . . . . . . . . . . .
Relativa 5−23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C. Indice
C−8 Festo P.BE−MTR−DCI−IO−ES es 0501a
S
Servicio IX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de medición 1−12 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de menú 4−6 , 4−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de referencia de las mediciones 1−10 . . . . . . . . . . . .
SoftwareFesto Configuration Tool (FCT) 1−16 . . . . . . . . . . . . . . . . . . . Inicio del FCT 5−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Instalación del FCT 5−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
T
Tabla de juegos de posiciónCompilar 5−23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tip mode XIII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Establecimiento del tipo de eje 5−12 . . . . . . . . . . . . . . . . . . . .
Tipo de ejeSet 4−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
U
Unidades de medida B−40 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
V
Versión XVI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .