most......tiempo predeterminado
TRANSCRIPT

INSTITUTO TECNOLOGICO DE LAZARO CARDENAS
INGENIERIA INDUSTRIAL
MATERIA: ESTUDIO DEL TRABAJO
PROFESOR: francisco Hernández riveraINTEGRANTES: CHEGUE RAMIREZ JOHANA LIZBETH MAGAÑA VEGA FERNANDO SANDOVAL REYES LÁZARO VILLEGAS SOLANO VÍCTOR
TIEMPO PREDERMINADO: MOST
CONTENIDO:Definición…………………………………………..Movimientos que abarca ………………….................Definición de cada uno de los movimientos……….Modelos de la secuencia de la técnica most………Conversiones para calcular tiempos estándar……Modelo secuencia………………………………….Fases de la secuencia………………………………Subactividades…………………………………….Ejemplos……………………………………………
SISTEMA PREDETERMINADO MOST•Es una técnica que nos permite analizar
cualquier operación manual y algunas operaciones con equipo. Se basa en actividades fundamentales.
LA MEDIDA DELTRABAJO•Se utiliza cuando se quiere saber el tiempo
requerido para cumplir el planeamiento, determinar la calidad de la ejecución y para establecer costos.
Para medir el trabajo manual existen tres tipos de secuencias
de actividad que son fundamentales
1. Secuencia de Mover General
2. Secuencia de Mover
Controlado
3. La Secuencia de Utilización de Herramientas
LA SECUENCIA DE MOST BASICO
1. Mover General: Mover objetos con las manos de un
lugar a otro a través el aire.
Subactividades:
•A: Distancia de Acción (principalmente horizontal)
•B: Movimiento del cuerpo (principalmente vertical)
•G: Obtener control
•P: Poner

2. Mover Controlado: Se usa para cubrir actividades como: operación de una palanca
o una manivela, la activación de una llave eléctrica, o simplemente para deslizar un
objeto sobre una superficie.
Subactividades:
•M: Movimiento controlado
•X: Tiempo del proceso
•I: Alineación
3. Utilización de Herramientas: abarca el uso de herramientas manuales para
actividades como: apretar o soltar, cortar, limpiar, etc.
Esta secuencia es una combinación de las actividades mover general y mover
controlado
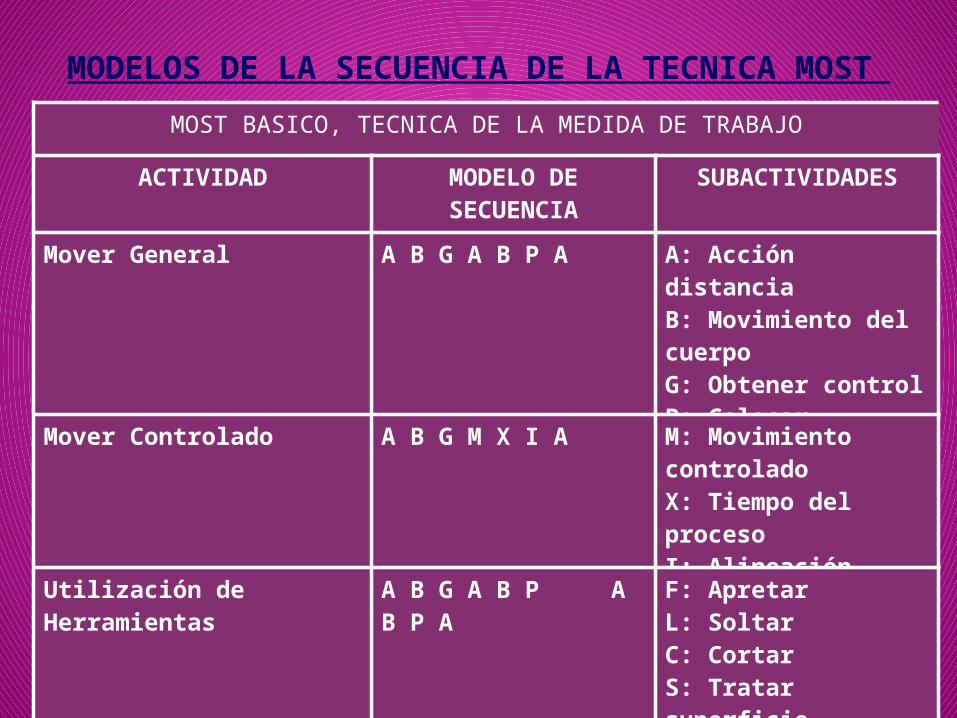
MODELOS DE LA SECUENCIA DE LA TECNICA MOST MOST BASICO, TECNICA DE LA MEDIDA DE TRABAJO
ACTIVIDAD MODELO DE SECUENCIA SUBACTIVIDADES
Mover General A B G A B P A A: Acción distanciaB: Movimiento del cuerpoG: Obtener controlP: Colocar
Mover Controlado A B G M X I A M: Movimiento controladoX: Tiempo del procesoI: Alineación
Utilización de Herramientas A B G A B P A B P A F: ApretarL: SoltarC: CortarS: Tratar superficieM: MedirR: RegistrarT: Pensar
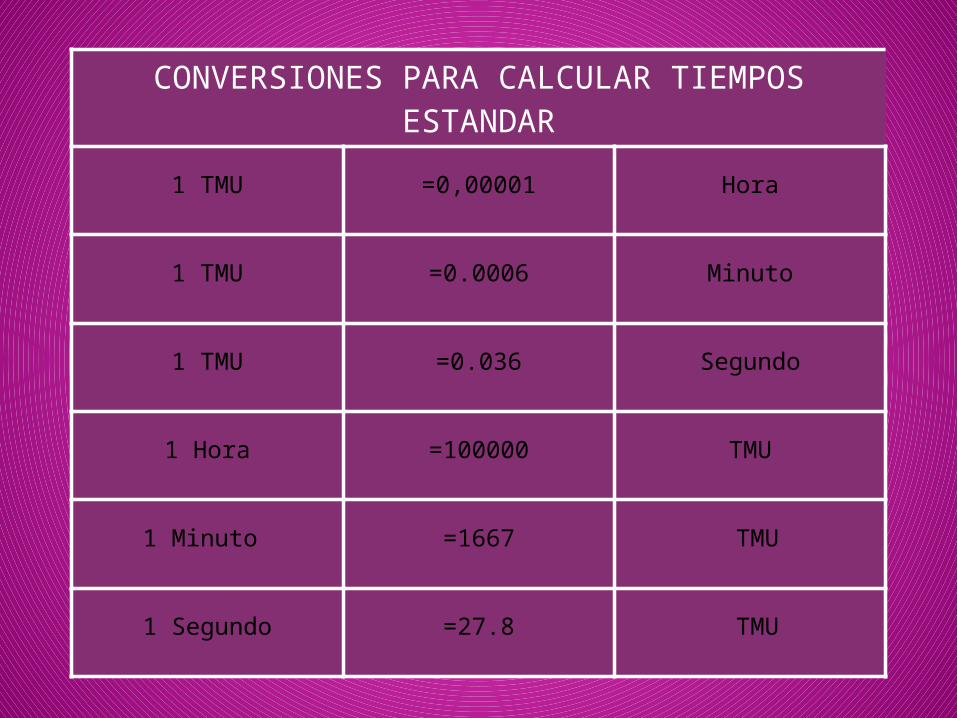
CONVERSIONES PARA CALCULAR TIEMPOS ESTANDAR
1 TMU =0,00001 Hora
1 TMU =0.0006 Minuto
1 TMU =0.036 Segundo
1 Hora =100000 TMU
1 Minuto =1667 TMU
1 Segundo =27.8 TMU
SECUENCIA DEL MOVER GENERAL
Se caracteriza por seguir una secuencia fija de subactividades que consta de las siguientes etapas:
•Alcanzar con una o dos manos un objetos u objetos.•Obtener control manual del objeto•Mover el objeto a una distancia hacia el punto donde ha de colocarse•Colocar el objeto en una posición temporal o final•Volver al lugar inicial.
MODELO SECUENCIALos parámetros de la secuencia de mover general describen el modelo de cinco etapas ya indicado:
A B G A B P A
Donde:•A: Distancia de Acción: incluye todos los movimientos espaciales de
los dedos, manos y/o pies, ya sea con o sin carga.
•B: Movimiento del cuerpo: todos los movimientos verticales del cuerpo, o las
acciones necesarias para superar obstrucción para el movimiento del cuerpo
•G: Obtener control: Incluye los movimientos manuales que se requiere para
obtener el control manual de uno o mas objetos y mas tarde dejar el control.
•P: Colocar: Todos lo movimientos de la etapa final del desplazamiento de un
objeto con el propósito de alinear, orientar o encajar con otro antes de dejar el
control.
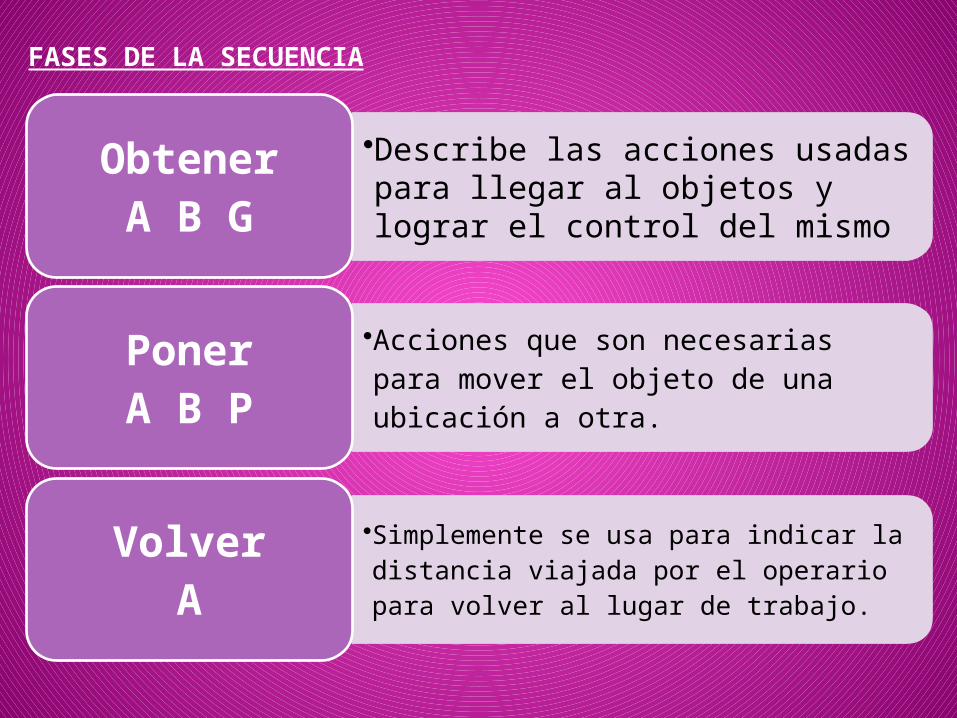
FASES DE LA SECUENCIA
•Describe las acciones usadas para llegar al objetos y lograr el control del mismo
ObtenerA B G
•Acciones que son necesarias para mover el objeto de una ubicación a otra.
PonerA B P
•Simplemente se usa para indicar la distancia viajada por el operario para volver al lugar de trabajo.
VolverA
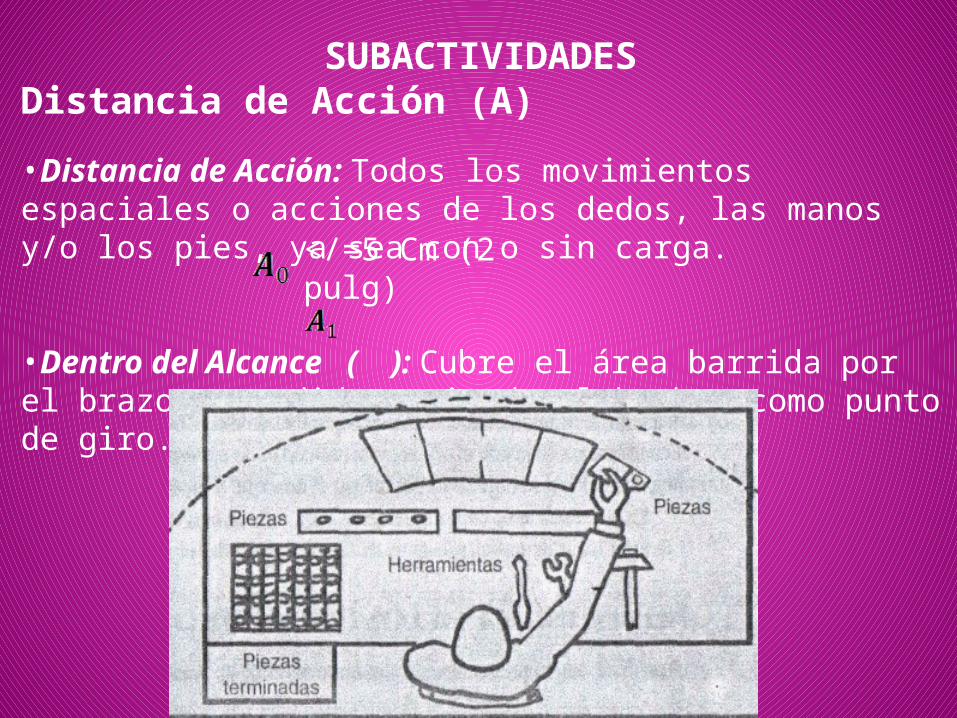
SUBACTIVIDADESDistancia de Acción (A)
•Distancia de Acción: Todos los movimientos espaciales o acciones de los dedos, las manos y/o los pies, ya sea con o sin carga.
•Dentro del Alcance ( ): Cubre el área barrida por el brazo extendido teniendo el hombro como punto de giro.
</=5 Cm (2 pulg)
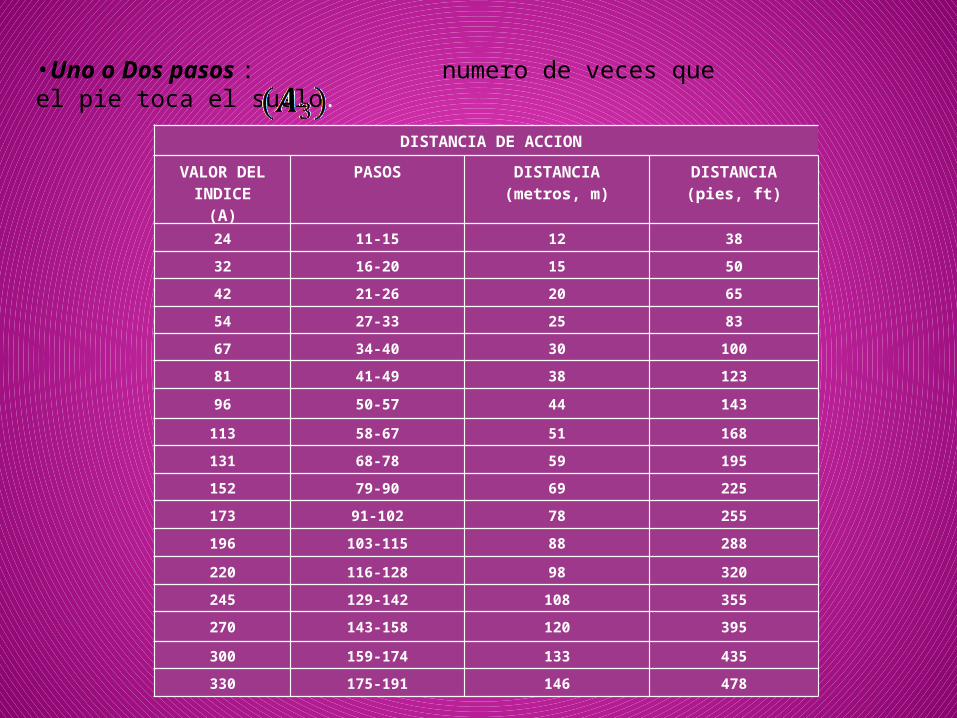
•Uno o Dos pasos : numero de veces que el pie toca el suelo.
DISTANCIA DE ACCION
VALOR DEL INDICE
(A)
PASOS DISTANCIA(metros, m)
DISTANCIA(pies, ft)
24 11-15 12 38
32 16-20 15 50
42 21-26 20 65
54 27-33 25 83
67 34-40 30 100
81 41-49 38 123
96 50-57 44 143
113 58-67 51 168
131 68-78 59 195
152 79-90 69 225
173 91-102 78 255
196 103-115 88 288
220 116-128 98 320
245 129-142 108 355
270 143-158 120 395
300 159-174 133 435
330 175-191 146 478
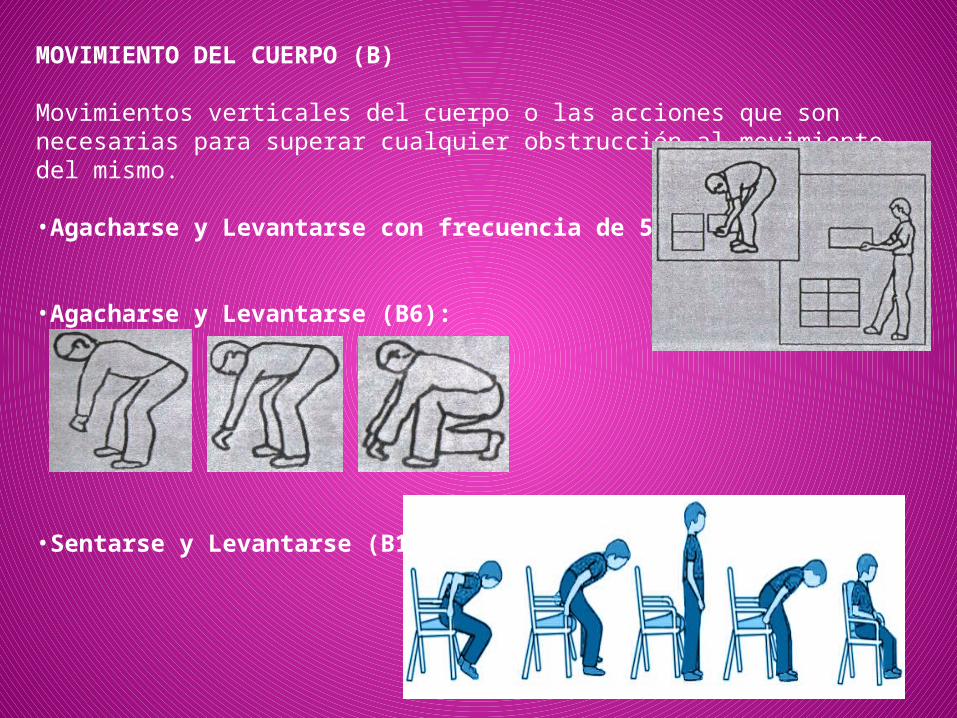
MOVIMIENTO DEL CUERPO (B)
Movimientos verticales del cuerpo o las acciones que son necesarias para superar cualquier obstrucción al movimiento del mismo.
•Agacharse y Levantarse con frecuencia de 50% (B3):
•Agacharse y Levantarse (B6):
•Sentarse y Levantarse (B10):

OBENER CONTROL (G)
Movimientos que se requieren para obtener por completo el control de uno o más objetos y después abandonar ese control.
•Objeto Ligero (G1):
•Desengranar o interconectados:

COLOCAR (P) Acciones que ocurren en la etapa final del desplazamiento de un objeto con el propósito de alinear, orientar un objeto con otro antes de dejar el control.
•Lanzar un objeto u objetos (P0): No hay colocación
•Dejar al lado (P1): El objeto se deja a un lado sin movimientos de ajuste o alineación.
•Ajuste Holgado (P1): Se requiere un ajuste en el momento de colocar el objeto en una posición predeterminada
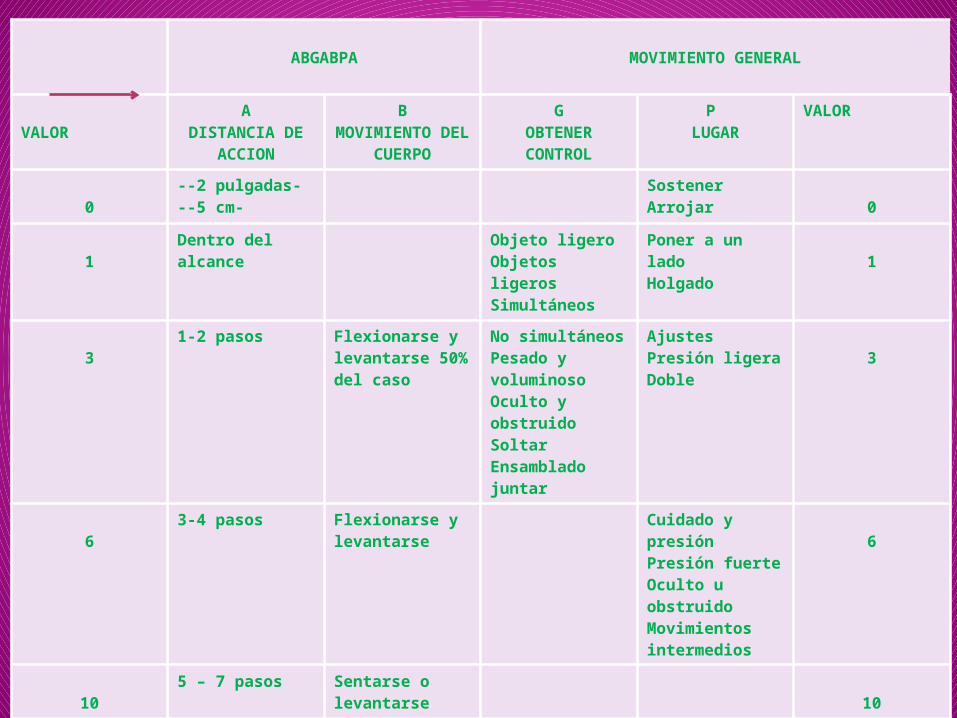
ABGABPA MOVIMIENTO GENERAL
VALORA
DISTANCIA DE ACCION
BMOVIMIENTO DEL
CUERPO
GOBTENER CONTROL
P LUGAR
VALOR
0--2 pulgadas---5 cm-
SostenerArrojar 0
1Dentro del alcance Objeto ligero
Objetos ligerosSimultáneos
Poner a un ladoHolgado 1
31-2 pasos Flexionarse y
levantarse 50% del caso
No simultáneosPesado y voluminosoOculto y obstruidoSoltar Ensambladojuntar
AjustesPresión ligeraDoble
3
63-4 pasos Flexionarse y
levantarse Cuidado y presiónPresión fuerteOculto u obstruidoMovimientos intermedios
6
105 – 7 pasos Sentarse o
levantarse 10
16 8- 10 pasos A través de la puerta
Subir o bajar rampas 16
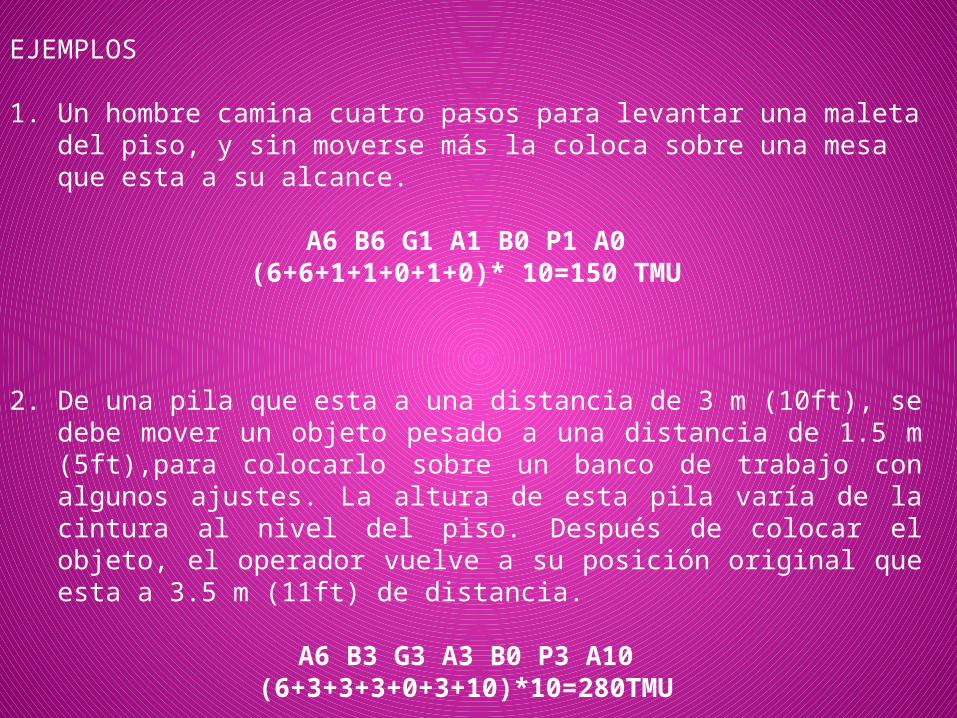
EJEMPLOS
1. Un hombre camina cuatro pasos para levantar una maleta del piso, y sin moverse más la coloca sobre una mesa que esta a su alcance.
A6 B6 G1 A1 B0 P1 A0(6+6+1+1+0+1+0)* 10=150 TMU
2. De una pila que esta a una distancia de 3 m (10ft), se debe mover un objeto pesado a una distancia de 1.5 m (5ft),para colocarlo sobre un banco de trabajo con algunos ajustes. La altura de esta pila varía de la cintura al nivel del piso. Después de colocar el objeto, el operador vuelve a su posición original que esta a 3.5 m (11ft) de distancia.
A6 B3 G3 A3 B0 P3 A10(6+3+3+3+0+3+10)*10=280TMU
SECUENCIA DE MOVER CONTROLADODescribe el desplazamiento manual de objetos sobre una trayectoria controlada.
El movimiento se produce de acuerdo con unas secuencias de Subactividades identificadas por las siguientes etapas:
1. Alcanzar a una distancia con una o dos manos el objeto 2. Obtener control del objeto.3. Mover el objeto sobre una trayectoria controlada.4. Permitir tiempo para que ocurra un proceso.5.Alinear el objeto después del movimiento controlado.6. Volver al lugar de trabajo
MODELO SECUENCIASerie de letras que representa cada una de las Subactividades de las actividades de la secuencia mover controlado:
A B G M X I A
Donde:A: distancia de acciónB: movimiento del cuerpoG: obtener controlM: movimiento controlado: se usa para analizar todos los movimientos manualmente, así como las acciones del objeto sobre una trayectoria controlada.X: tiempo del proceso: porción del trabajo controlado: aparatos eléctricos, mecánicos.I: alineación: se usa para analizar las acciones manuales subsiguientes al movimiento controlado.
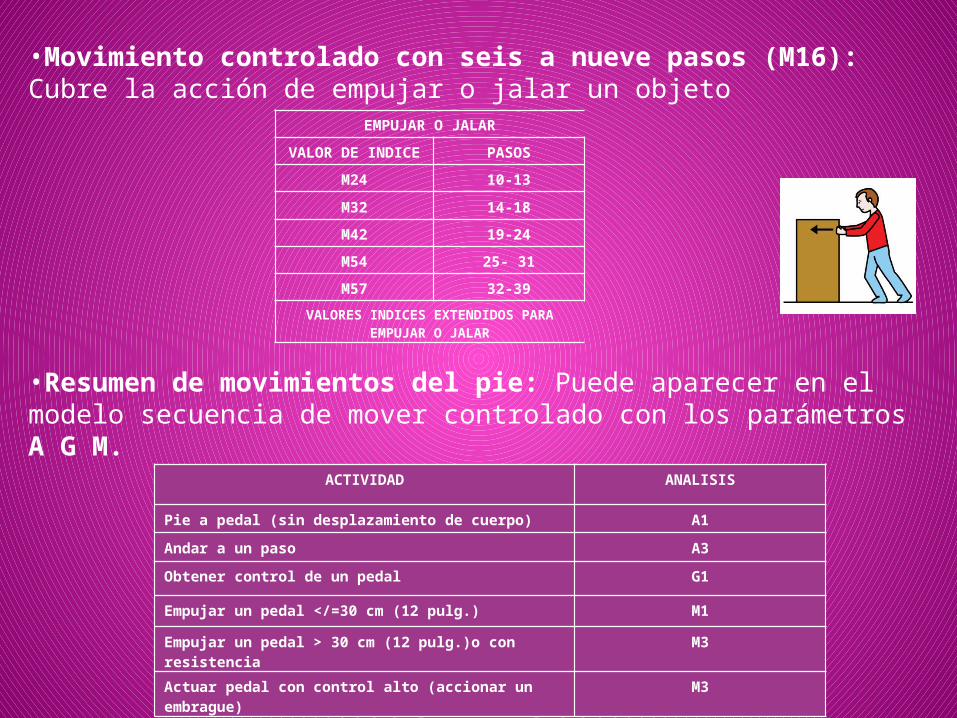
•Movimiento controlado con seis a nueve pasos (M16): Cubre la acción de empujar o jalar un objeto
•Resumen de movimientos del pie: Puede aparecer en el modelo secuencia de mover controlado con los parámetros A G M.
EMPUJAR O JALAR
VALOR DE INDICE PASOS
M24 10-13
M32 14-18
M42 19-24
M54 25- 31
M57 32-39
VALORES INDICES EXTENDIDOS PARA EMPUJAR O JALAR
ACTIVIDAD ANALISIS
Pie a pedal (sin desplazamiento de cuerpo) A1
Andar a un paso A3
Obtener control de un pedal G1
Empujar un pedal </=30 cm (12 pulg.) M1
Empujar un pedal > 30 cm (12 pulg.)o con resistencia M3
Actuar pedal con control alto (accionar un embrague) M3
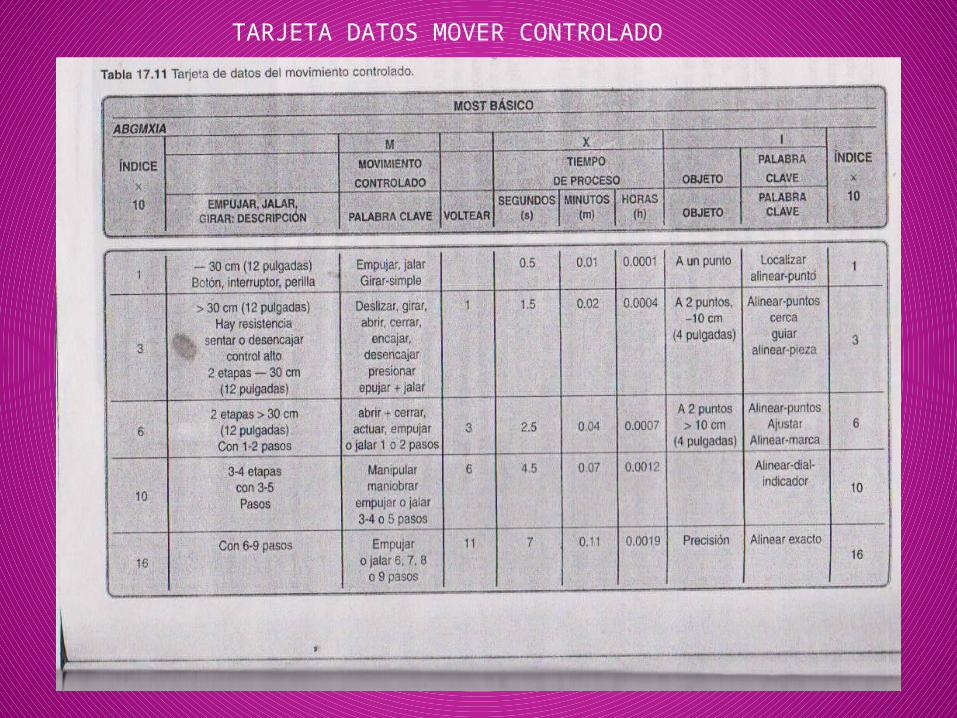
TARJETA DATOS MOVER CONTROLADO