introducción a la robótica móvil
TRANSCRIPT

Introducción a la Robótica móvil
Por el compañero Marco Antonio Muñoz Duran

Contenido del curso Control Conceptos básicos y tipos de robots
Tipos de Control
Sistemas de locomoción
Configuración de un robot
Concursos y Categorías
Mecánica Materiales de ingeniería
Relación de potencia
Moto reductores
Procesos de manufactura
Electrónica Lógica digital
Electrónica Analógica
Sensores
Baterías

Clasificación de robots
Robots
Robots móviles
Autónomos A radio control
Robots estacionarios
Manipulador Industria
Vehículos AGV
Definiciones
• Robot = Es un manipulador reprogramable, multifuncional, con control automático, que puede estar en un lugar fijo o moverse, ya que esta diseñado para mover piezas, herramientas o dispositivos especiales, por medio de movimientos variables programados para la realización de diversos trabajos
Tipos de Control
Lazo abierto
• Es aquel sistema en que solo actúa el proceso sobre la señal de entrada y da como resultado una señal de salida independiente a la señal de entrada, pero basada en la primera.
Lazo cerrado
• Son los sistemas en los que la acción de control está en función de la señal de salida. Los sistemas de circuito cerrado usan la retroalimentación desde un resultado final para ajustar la acción de control en consecuencia.

Lazo abierto • Control manual • Ser sencillos y de fácil concepto. • Nada asegura su estabilidad ante una
perturbación. • Ser afectado por las perturbaciones. • Éstas pueden ser tangibles o intangibles. • La precisión depende de la previa calibración del
sistema.
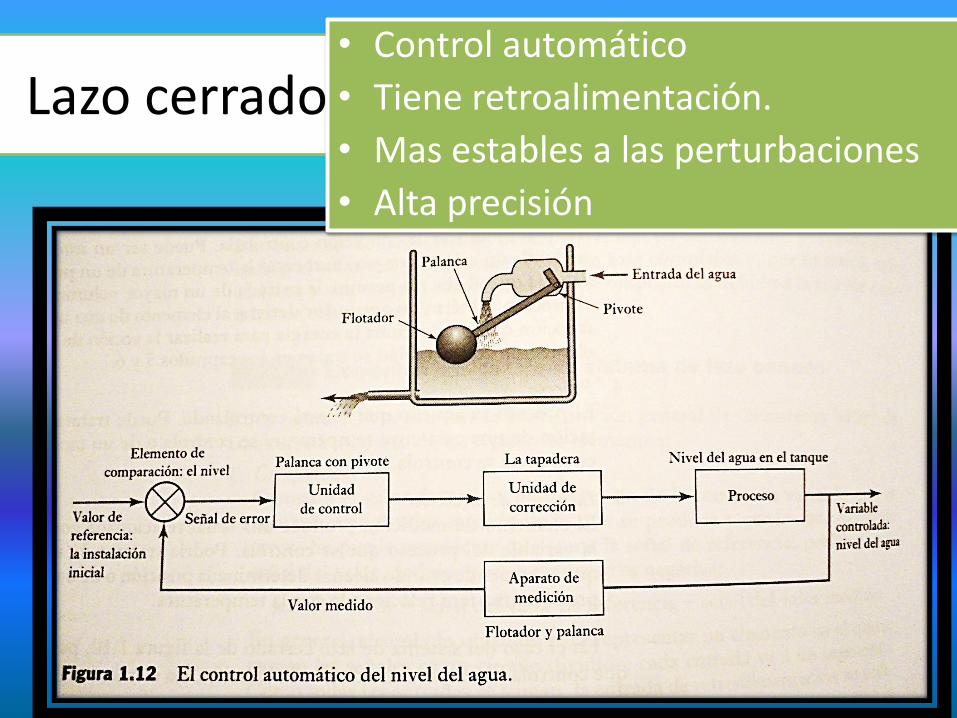
Lazo cerrado • Control automático
• Tiene retroalimentación.
• Mas estables a las perturbaciones
• Alta precisión
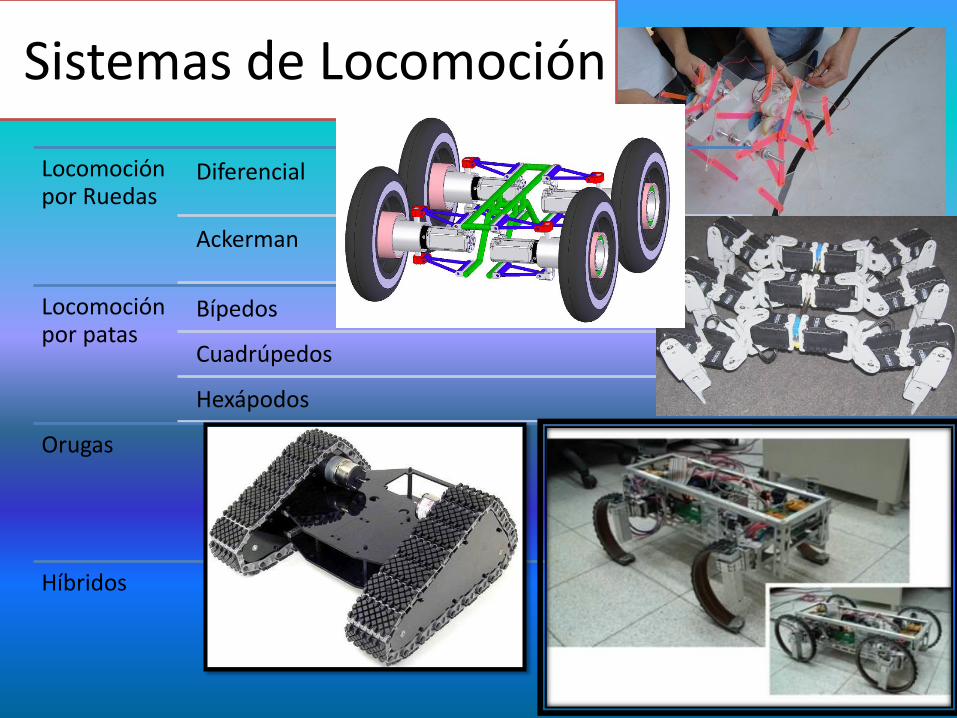
Sistemas de Locomoción
Locomoción por Ruedas
Diferencial
Ackerman
Locomoción por patas
Bípedos
Cuadrúpedos
Hexápodos
Orugas
Híbridos

Arquitectura de los Robots
• Micro controladores
• Trabaja a de 0 a 5 V
• Reprogramable
Subsistema de control
• Electrónica de potencia (Puente H) (transistores, relevadores, MOSFET)
• Trabaja todo el voltaje de las baterías
• Distribuye toda la energía según el control
Subsistema de potencia
• Motores y actuadores
• Realizar la función física del robot (Trabajo)
Subsistema mecánico
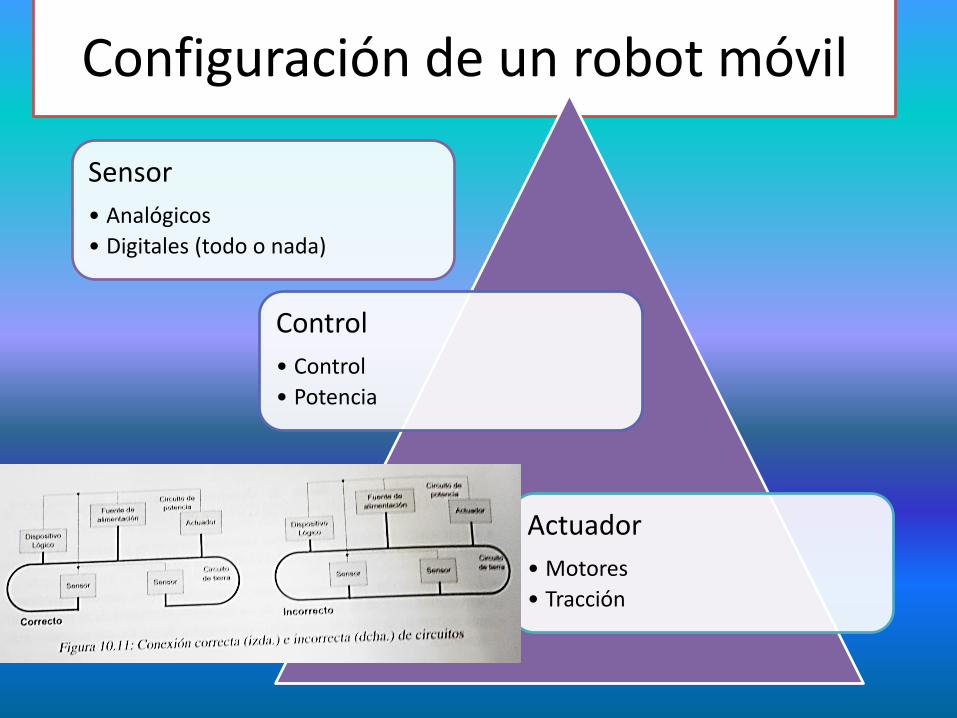
Configuración de un robot móvil
Sensor
• Analógicos
• Digitales (todo o nada)
Control
• Control
• Potencia
Actuador
• Motores
• Tracción

Componentes básicos
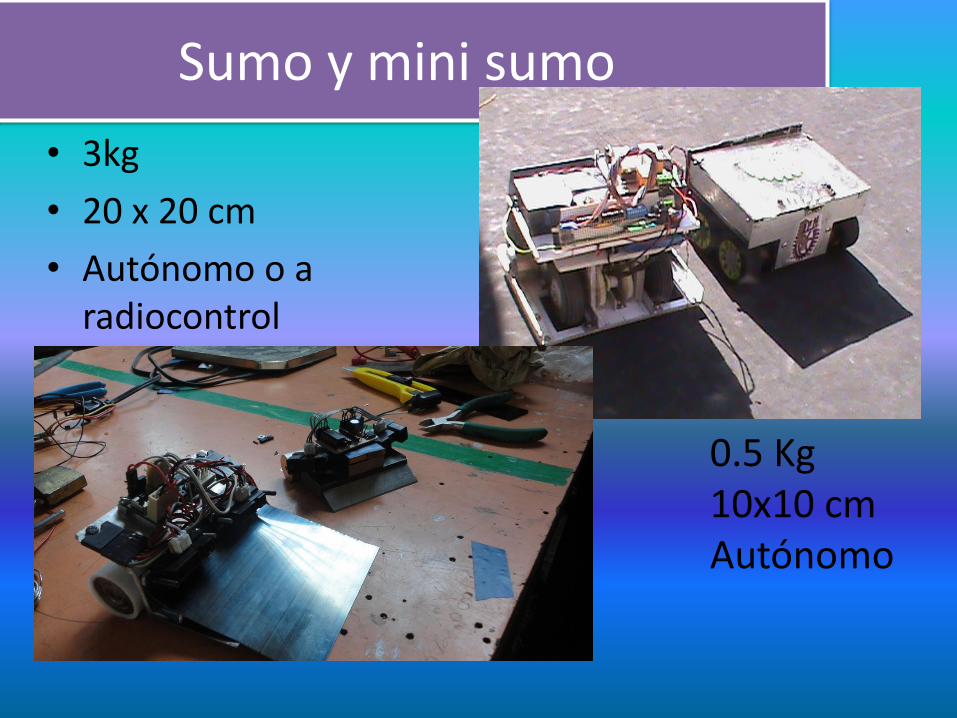
Sumo y mini sumo
• 3kg
• 20 x 20 cm
• Autónomo o a radiocontrol
0.5 Kg 10x10 cm Autónomo

Robots de guerra

Sigue líneas (velocista, o persecución)
• Seguir la línea blanca
• 25 x 20 cm
• Autónomo

Polo acuático
• Equipos de 3 robots por equipo
• Debe flotar • Radio control

Propiedades de los materiales
Propiedades físicas
Conductividad eléctrica
Densidad
Propiedades mecánicas
Volumétricas
Fragilidad
Ductilidad
Tenacidad
Propiedades mecánicas
Superficiales
Resistencia al desgaste
Dureza
Rozamiento

Materiales en ingeniería
• Las propiedades mecánicas superficiales de los materiales. Pueden modificarse por el método de producción, con los tratamientos térmicos

Aceros
Acero para estructuras
• Bajo contenido de carbono
• Se deforma antes de romperse
• Fácil de soldar
• Bajo precio
Aceros para temple
• Medio contenido de carbono
• Ideal para temple
• Partes de maquinas
• Aceros bonificados
Aceros inoxidables
• Acero con cromo y molibdeno
• Difícil de mecanizar
• Alto precio
• Procesos limpios
Aceros para herramientas
• Alto contenido de carbono
• Gran dureza superficial
• Generalmente con tratamientos térmicos específicos
Numero 1 2 3 4
Aleación Acero al carbono
Níquel Cromo níquel
Cromo
AISI 2340 ACERO AL NIQUEL CON 3% DE NIQUEL Y 0.40% DE CARBONO AISI 1010 ACERO AL CARBON CON 0.10 % DE CARBON (“COOLROL”)

Relación de potencia
Parámetros para la selección de motores:
• Torque máximo o par de bloqueo
• Par en vacío
• Velocidad en vacío 𝑃𝑒 ∗ 𝜂 = 𝑃𝑚
𝑃𝑚 = 𝜏 ∗ 𝜔= 𝐹 ∗ 𝑣
𝑃𝑒 = 𝑉 ∗ 𝐼

Control de motores
Velocidad
Aumentar la velocidad Disminuir la velocidad
Sentido
Manecillas del reloj Contrario a las Manecillas del reloj
Estado
Encendido Apagado

Tipos de motores eléctricos
Motor eléctrico de
CC con escobillas
(Puente H )
(PWM)
Busheles motores de
CC sin escobillas
(PWM)
Servo motor
(Pulsos)
Motor a pasos
(Secuencial)

Moto reductores
Reductoras
• De un diámetro grande a un diámetro menor
• Multiplica el par
• Divide la velocidad
Multiplicadoras
• De un diámetro pequeño a un diámetro mayor
• Multiplica la velocidad
• Divide el par

Unión eje-rueda

Bujes
Rodamientos
Arandela Chumacera
Apoyos de Ejes
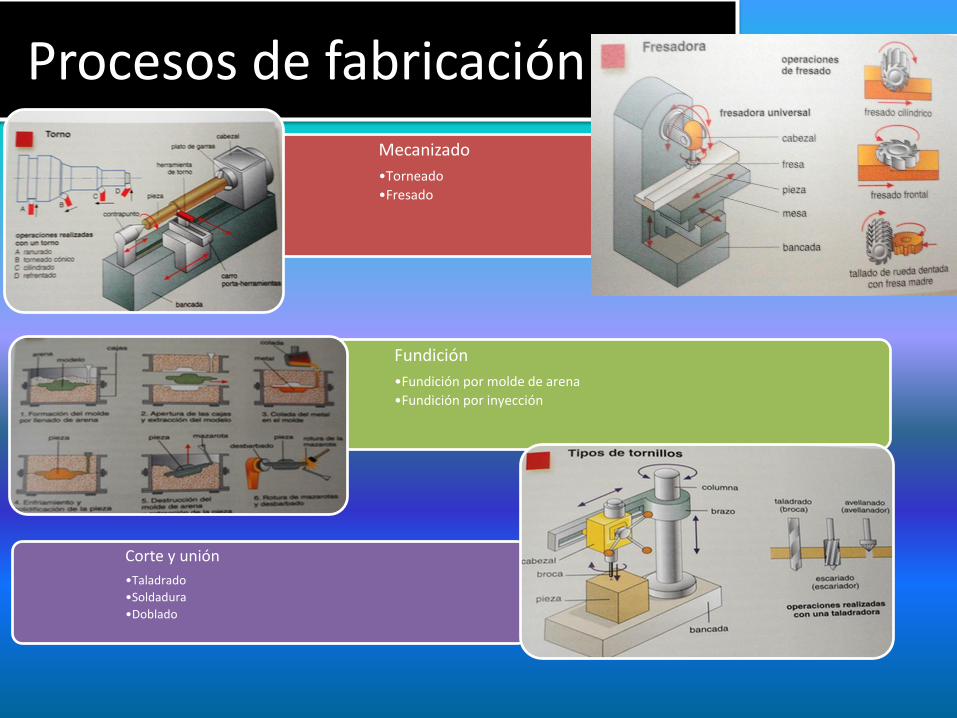
Procesos de fabricación
Mecanizado
•Torneado
•Fresado
Fundición
•Fundición por molde de arena
•Fundición por inyección
Corte y unión
•Taladrado
•Soldadura
•Doblado

Electrónica

Lógica digital
Sistemas de numeración
Decimal
Binario
BCD
Gray
Sexagesimal
Circuitos combi nacionales
And
Or
Not
XOR
NAND
NOR
XNOR
Circuitos secuenciales
Elementos de memoria
Circuitos síncronos
Registros

Decimal Binario Hexadecimal Octal BCD Gray o Reflejado
0 0000 0 0 0000 0000
1 0001 1 1 0001 0001
2 0010 2 2 0010 0011
3 0011 3 3 0011 0010
4 0100 4 4 0100 0110
5 0101 5 5 0101 0111
6 0110 6 6 0110 0101
7 0111 7 7 0111 0100
8 1000 8 10 1000 1100
9 1001 9 11 1001 1101
10 1010 A 12 0001 0000 1111
11 1011 B 13 0001 0001 1110
12 1100 C 14 0001 0010 1010
13 1101 D 15 0001 0011 1011
14 1110 E 16 0001 0100 1001
15 1111 F 17 0001 0101 1000
Sistemas de
numeración

Operaciones lógicas
OR (suma)
AND (multiplicación)
XOR (OR exclusiva)
NOT (negación)
NOR
NAND
XNOR

Memoria (flip flop)
• SR JK D
Sistemas síncronos
Registros
Circuitos secuenciales

Tiene múltiples usos y aplicaciones principalmente como multivibrador mono estable
• 𝑇𝑎𝑙𝑡𝑜 = 0.693(𝑅𝑏 ∗ 𝐶)
• 𝑇𝑏𝑎𝑗𝑜 = 0.693((𝑅𝑎 + 𝑅𝑏) ∗ 𝐶)
Temporizador 555

Puente H
Se necesita cerrar los interruptores en la secuencia adecuada para controlar el
motor en ambos sentidos
S1 S2 S3 S4 Resultado
1 0 0 1 El motor gira en avance
0 1 1 0 El motor gira en retroceso
0 0 0 0 El motor se detiene bajo su inercia
1 0 1 0 El motor frena (fast-stop)
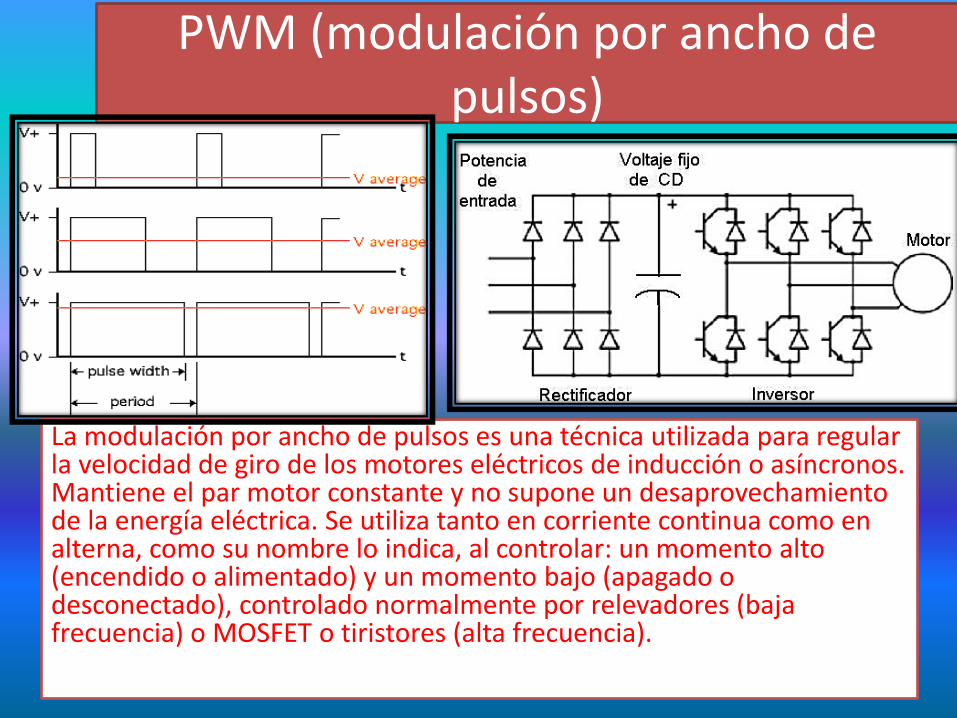
PWM (modulación por ancho de pulsos)
La modulación por ancho de pulsos es una técnica utilizada para regular la velocidad de giro de los motores eléctricos de inducción o asíncronos. Mantiene el par motor constante y no supone un desaprovechamiento de la energía eléctrica. Se utiliza tanto en corriente continua como en alterna, como su nombre lo indica, al controlar: un momento alto (encendido o alimentado) y un momento bajo (apagado o desconectado), controlado normalmente por relevadores (baja frecuencia) o MOSFET o tiristores (alta frecuencia).
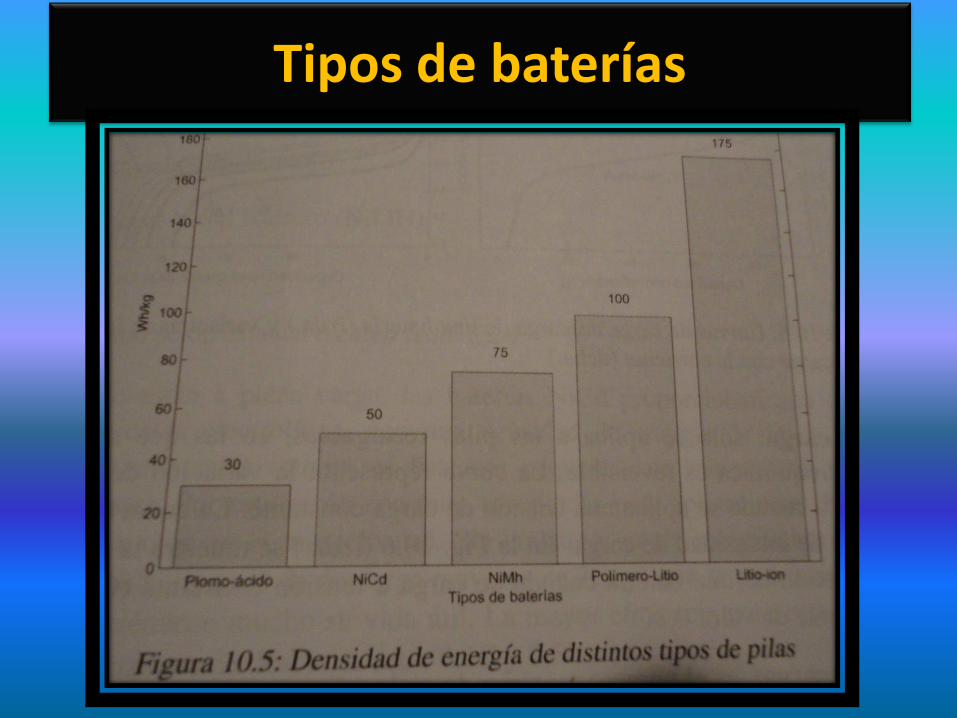
Tipos de baterías

Baterías
• Voltaje que ofrece la pila en sus terminales y depende de la carga de la pila
Tensión nominal
• Es la cantidad total de energía almacenada en una pila
Capacidad nominal
• Cantidad de energía almacenada en la pila por unidad de peso o de volumen. Depende del tipo de pila
Densidad de energía
• Máxima valor de intensidad que puede mantener una pila durante su descarga
Intensidad de descarga

Sensores

Sensores de posición • Encoder
• Ópticos
• Laser
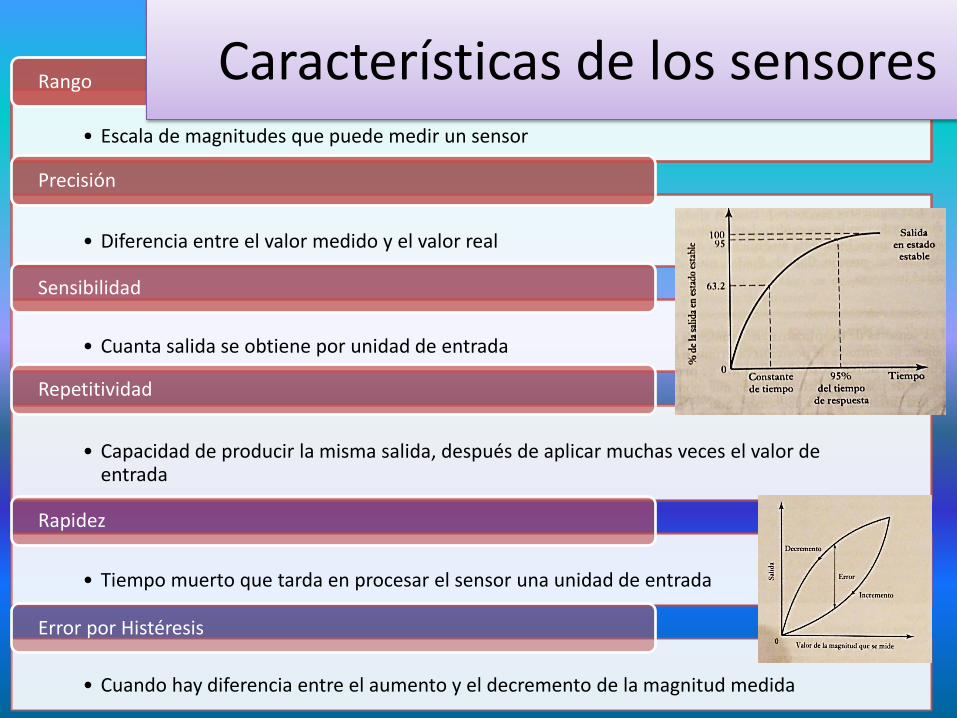
• Escala de magnitudes que puede medir un sensor
Rango
• Diferencia entre el valor medido y el valor real
Precisión
• Cuanta salida se obtiene por unidad de entrada
Sensibilidad
• Capacidad de producir la misma salida, después de aplicar muchas veces el valor de entrada
Repetitividad
• Tiempo muerto que tarda en procesar el sensor una unidad de entrada
Rapidez
• Cuando hay diferencia entre el aumento y el decremento de la magnitud medida
Error por Histéresis
Características de los sensores
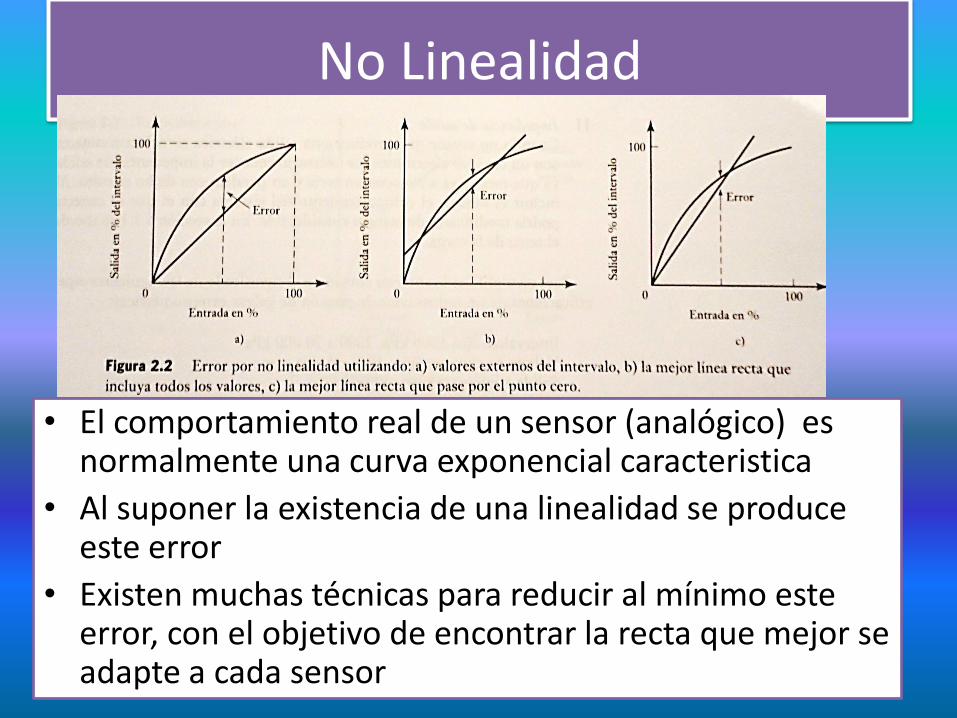
No Linealidad
• El comportamiento real de un sensor (analógico) es normalmente una curva exponencial caracteristica
• Al suponer la existencia de una linealidad se produce este error
• Existen muchas técnicas para reducir al mínimo este error, con el objetivo de encontrar la recta que mejor se adapte a cada sensor

Referencias Libros
Cibernética Aplicada de robot educativos
Meca trónica
Nueva autodidactica enciclopedia universal tomo
3