introducciÓn a la robÓtica mÓvil · sede regional orán universidad nacional de salta...
TRANSCRIPT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 1
INTRODUCCIINTRODUCCIÓÓNNA LAA LA
ROBROBÓÓTICA MTICA MÓÓVILVIL
Curso de ExtensiCurso de Extensióónn
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 2
Tema 5
PROGRAMACIPROGRAMACIÓÓN DEL ROBOTN DEL ROBOT
Curso de IntroducciCurso de Introduccióón a la Robn a la Robóótica Mtica Móóvilvil
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 3
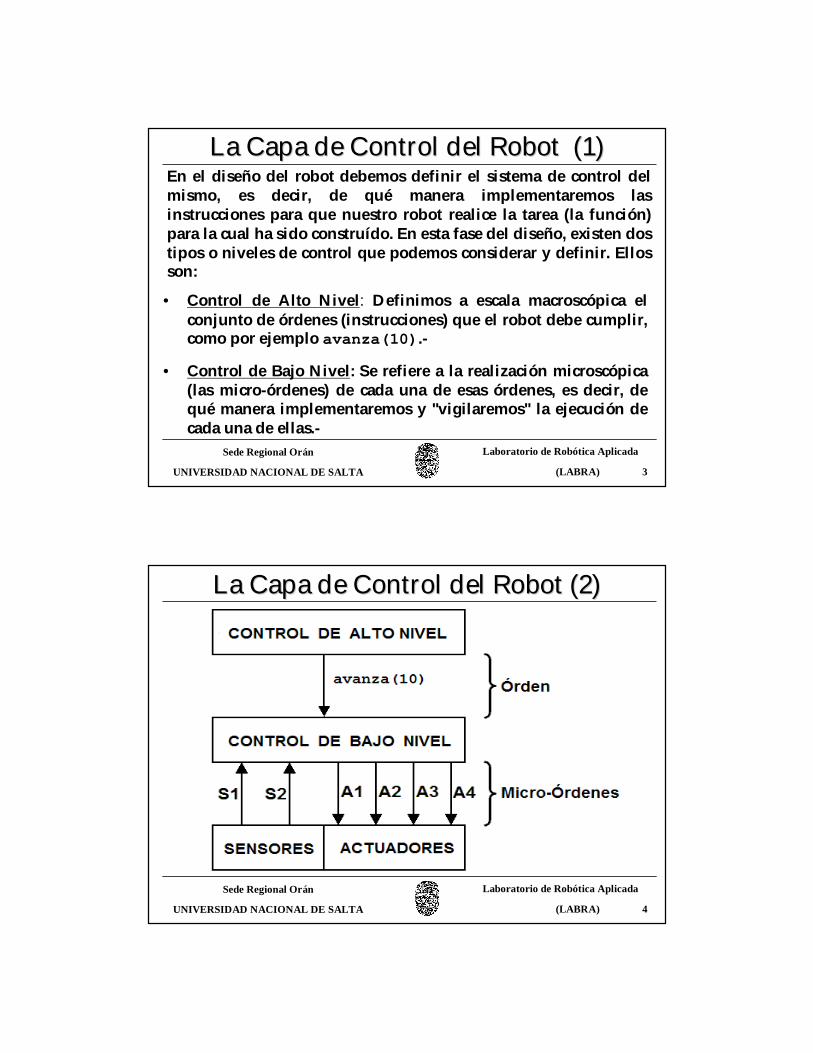
La Capa de Control del Robot (1)La Capa de Control del Robot (1)En el diseño del robot debemos definir el sistema de control del mismo, es decir, de qué manera implementaremos las instrucciones para que nuestro robot realice la tarea (la función) para la cual ha sido construído. En esta fase del diseño, existen dos tipos o niveles de control que podemos considerar y definir. Ellos son:
• Control de Alto Nivel: Definimos a escala macroscópica el conjunto de órdenes (instrucciones) que el robot debe cumplir, como por ejemplo avanza(10).-
• Control de Bajo Nivel: Se refiere a la realización microscópica (las micro-órdenes) de cada una de esas órdenes, es decir, de qué manera implementaremos y "vigilaremos" la ejecución de cada una de ellas.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 4
La Capa de Control del Robot (2)La Capa de Control del Robot (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 5
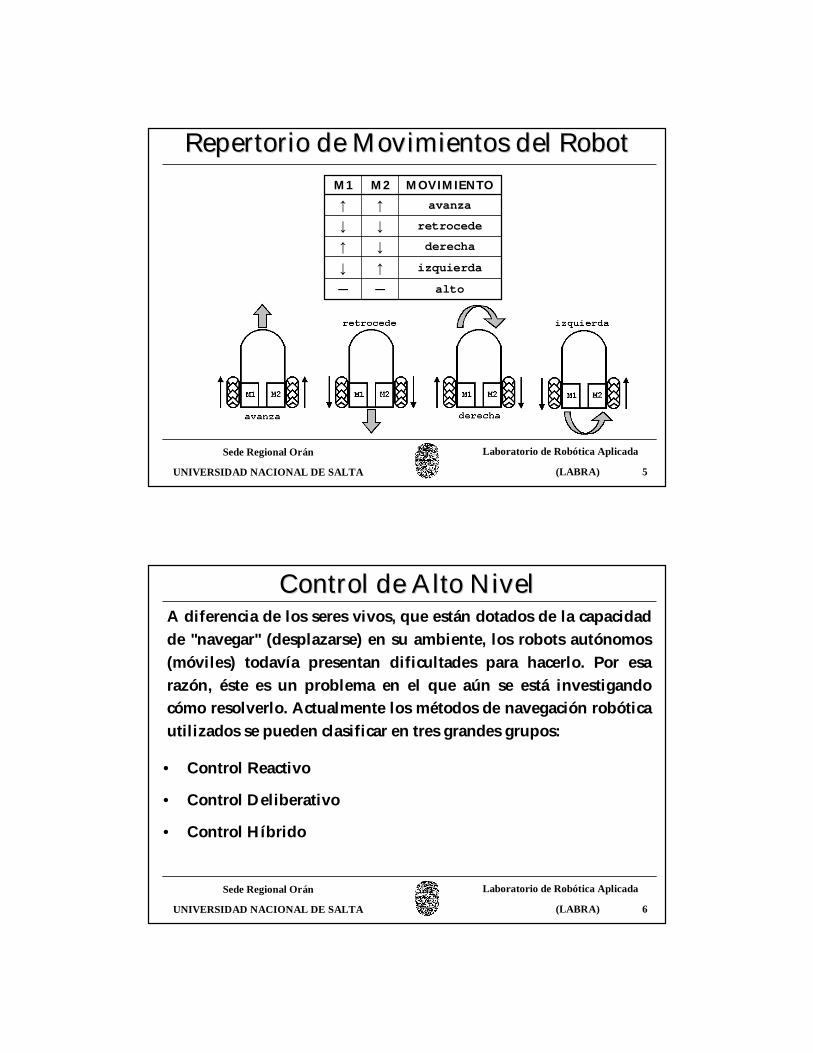
Repertorio de Movimientos del RobotRepertorio de Movimientos del Robot
alto──izquierda↑↓derecha↓↑
retrocede↓↓avanza↑↑
MOVIMIENTOM2M1
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 6
Control de Alto NivelControl de Alto NivelA diferencia de los seres vivos, que están dotados de la capacidad de "navegar" (desplazarse) en su ambiente, los robots autónomos (móviles) todavía presentan dificultades para hacerlo. Por esa razón, éste es un problema en el que aún se está investigando cómo resolverlo. Actualmente los métodos de navegación robótica utilizados se pueden clasificar en tres grandes grupos:
• Control Reactivo
• Control Deliberativo
• Control Híbrido
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 7
Control ReactivoControl ReactivoEs una estrategia que acopla información sensorial en tiempo real con las acciones motrices, sin la intervención de representaciones simbólicas para el modelado parcial o total del entorno en el que se encuentra un robot. Tiene un fuerte basamento biológico, pues se parece al comportamiento de estímulo/repuesta que presentan la mayoría de los seres vivos. Éste tipo de control se ajusta bien en los ambientes dinámicamente cambiantes. La frase que resumiría este tipo de control sería: "Siento, luego Actúo".-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 8
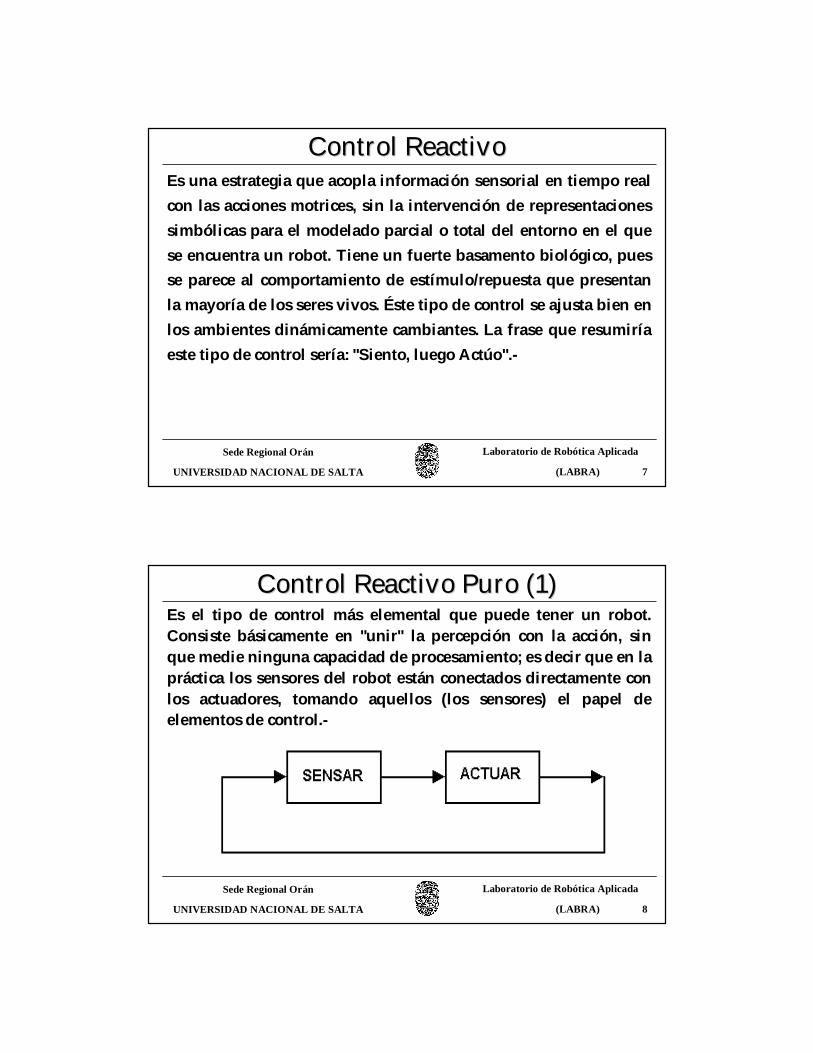
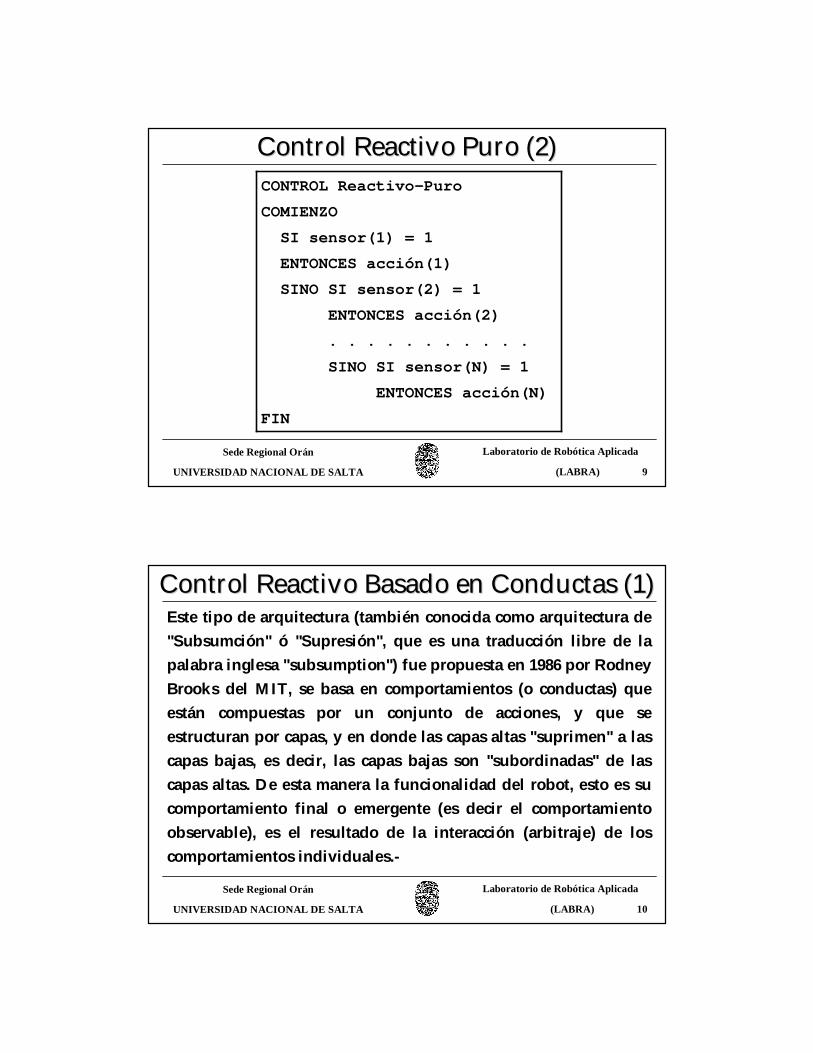
Es el tipo de control más elemental que puede tener un robot. Consiste básicamente en "unir" la percepción con la acción, sin que medie ninguna capacidad de procesamiento; es decir que en lapráctica los sensores del robot están conectados directamente con los actuadores, tomando aquellos (los sensores) el papel de elementos de control.-
Control Reactivo Puro (1)Control Reactivo Puro (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 9
CONTROL Reactivo-Puro
COMIENZO
SI sensor(1) = 1
ENTONCES acción(1)
SINO SI sensor(2) = 1
ENTONCES acción(2)
. . . . . . . . . . .
SINO SI sensor(N) = 1
ENTONCES acción(N)
FIN
Control Reactivo Puro (2)Control Reactivo Puro (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 10
Control Reactivo Basado en Conductas (1)Control Reactivo Basado en Conductas (1)Este tipo de arquitectura (también conocida como arquitectura de "Subsumción" ó "Supresión", que es una traducción libre de la palabra inglesa "subsumption") fue propuesta en 1986 por Rodney Brooks del MIT, se basa en comportamientos (o conductas) que están compuestas por un conjunto de acciones, y que se estructuran por capas, y en donde las capas altas "suprimen" a las capas bajas, es decir, las capas bajas son "subordinadas" de lascapas altas. De esta manera la funcionalidad del robot, esto es su comportamiento final o emergente (es decir el comportamiento observable), es el resultado de la interacción (arbitraje) de los comportamientos individuales.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 11
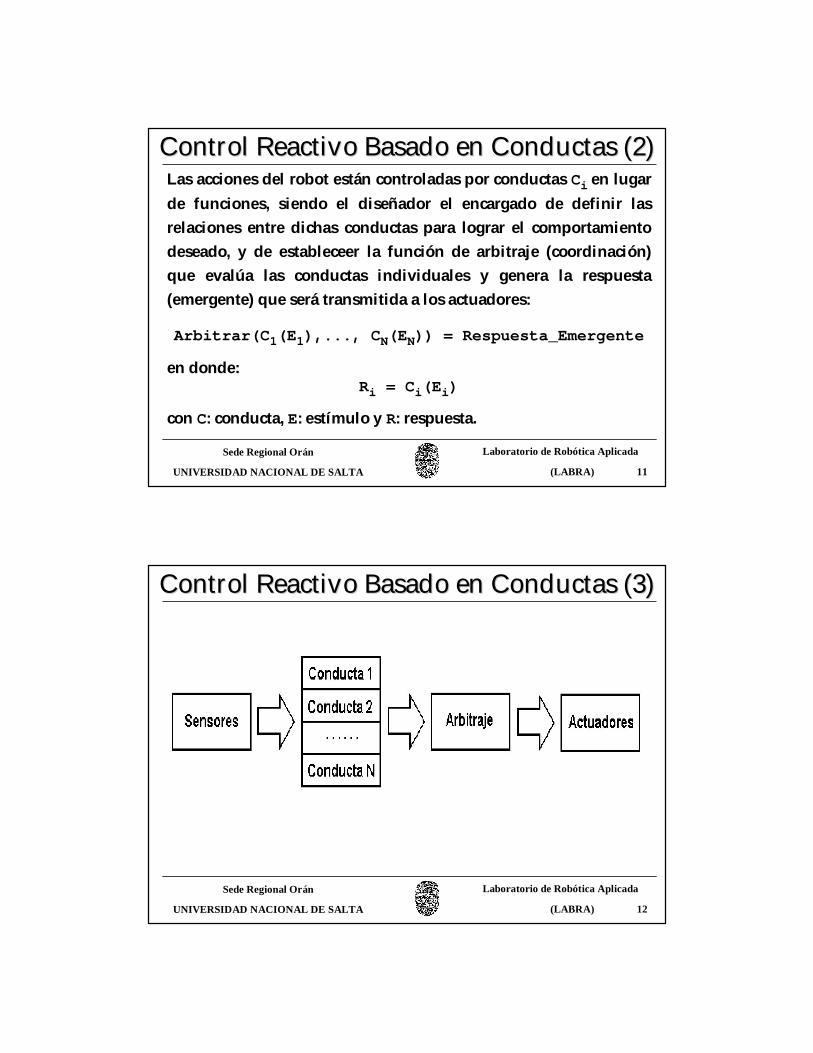
Control Reactivo Basado en Conductas (2)Control Reactivo Basado en Conductas (2)Las acciones del robot están controladas por conductas Ci en lugar de funciones, siendo el diseñador el encargado de definir las relaciones entre dichas conductas para lograr el comportamiento deseado, y de estableceer la función de arbitraje (coordinación) que evalúa las conductas individuales y genera la respuesta (emergente) que será transmitida a los actuadores:
Arbitrar(C1(E1),..., CN(EN)) = Respuesta_Emergente
en donde:Ri = Ci(Ei)
con C: conducta, E: estímulo y R: respuesta.
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 12
Control Reactivo Basado en Conductas (3)Control Reactivo Basado en Conductas (3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 13
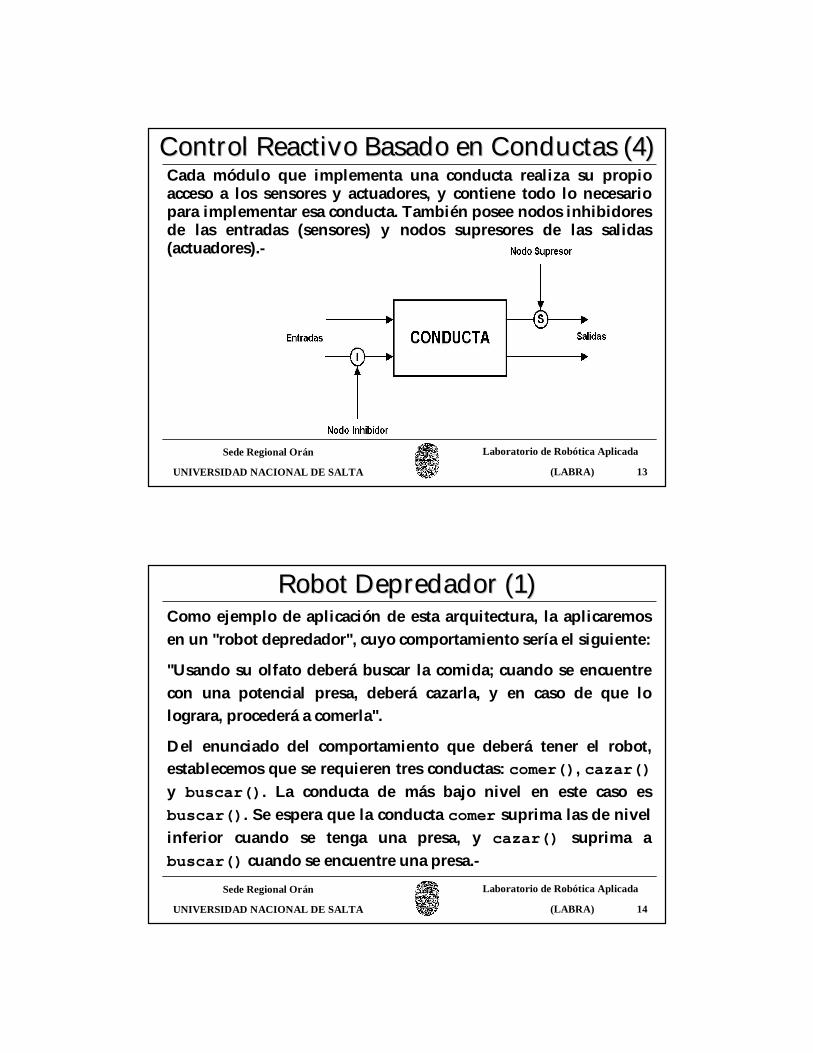
Cada módulo que implementa una conducta realiza su propio acceso a los sensores y actuadores, y contiene todo lo necesario para implementar esa conducta. También posee nodos inhibidores de las entradas (sensores) y nodos supresores de las salidas (actuadores).-
Control Reactivo Basado en Conductas (4)Control Reactivo Basado en Conductas (4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 14
Como ejemplo de aplicación de esta arquitectura, la aplicaremos en un "robot depredador", cuyo comportamiento sería el siguiente:
"Usando su olfato deberá buscar la comida; cuando se encuentre con una potencial presa, deberá cazarla, y en caso de que lo lograra, procederá a comerla".
Del enunciado del comportamiento que deberá tener el robot, establecemos que se requieren tres conductas: comer(), cazar()y buscar(). La conducta de más bajo nivel en este caso es buscar(). Se espera que la conducta comer suprima las de nivel inferior cuando se tenga una presa, y cazar() suprima a buscar() cuando se encuentre una presa.-
Robot Depredador (1)Robot Depredador (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 15
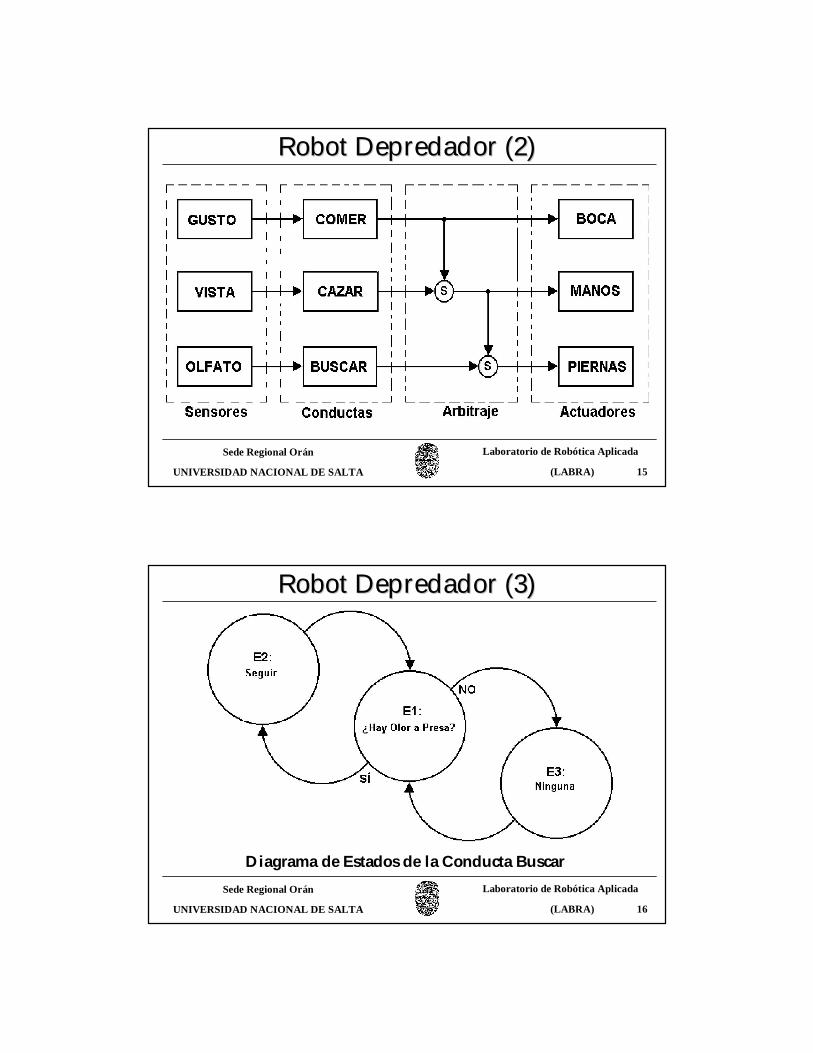
Robot Depredador (2)Robot Depredador (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 16
Robot Depredador (3)Robot Depredador (3)
Diagrama de Estados de la Conducta Buscar
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 17
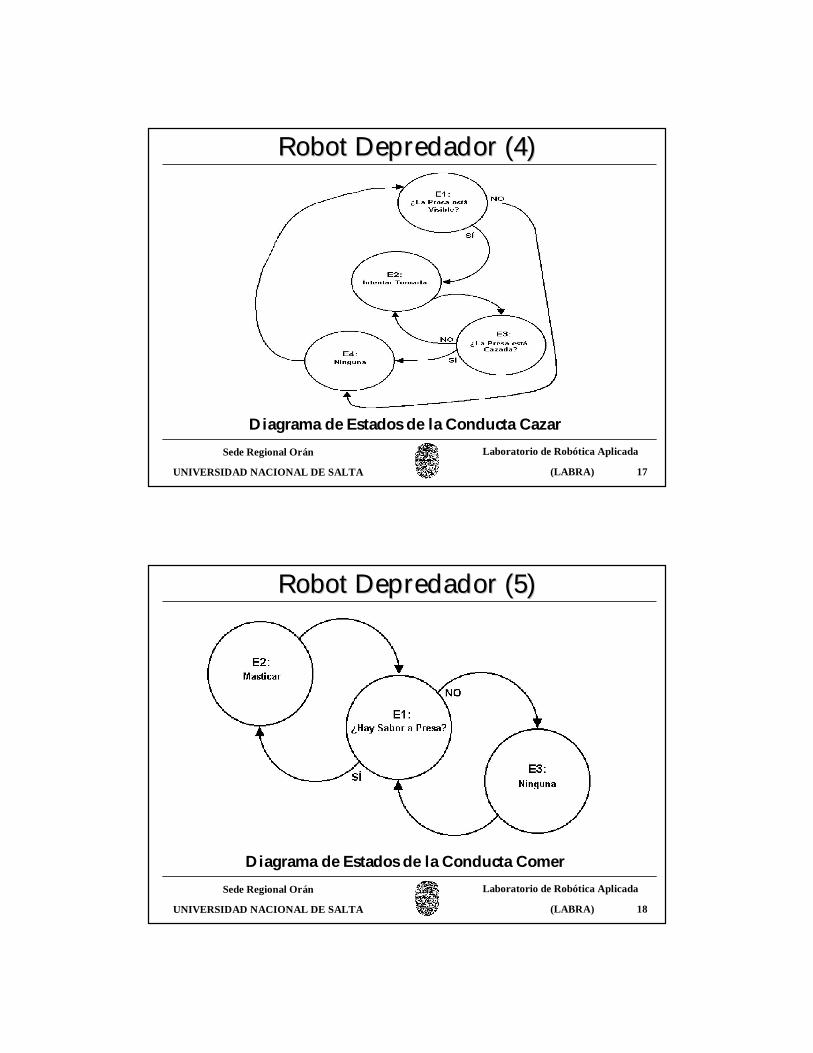
Robot Depredador (4)Robot Depredador (4)
Diagrama de Estados de la Conducta Cazar
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 18
Robot Depredador (5)Robot Depredador (5)
Diagrama de Estados de la Conducta Comer
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 19
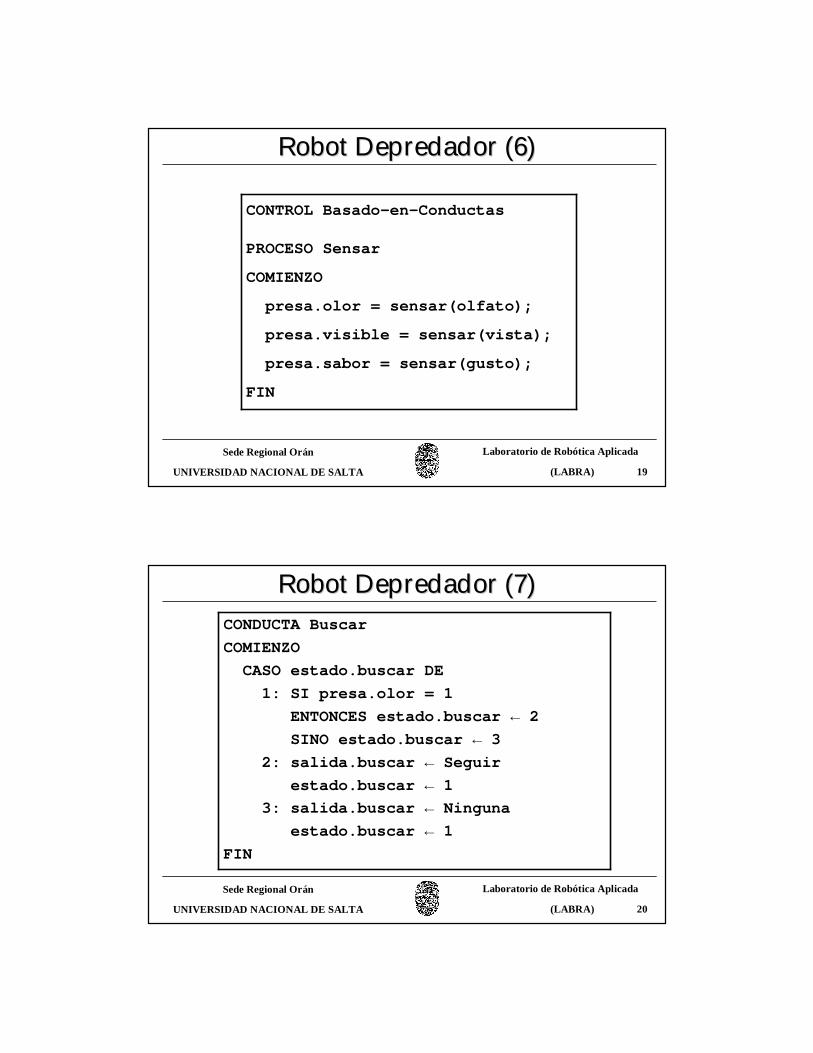
CONTROL Basado-en-Conductas
PROCESO Sensar
COMIENZO
presa.olor = sensar(olfato);
presa.visible = sensar(vista);
presa.sabor = sensar(gusto);
FIN
Robot Depredador (6)Robot Depredador (6)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 20
CONDUCTA BuscarCOMIENZO
CASO estado.buscar DE1: SI presa.olor = 1
ENTONCES estado.buscar ← 2SINO estado.buscar ← 3
2: salida.buscar ← Seguirestado.buscar ← 1
3: salida.buscar ← Ningunaestado.buscar ← 1
FIN
Robot Depredador (7)Robot Depredador (7)

Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 21
CONDUCTA CazarCOMIENZO
CASO estado.cazar DE1: SI presa.visible = 1
ENTONCES estado.cazar ← 2SINO estado.cazar ← 4
2: salida.cazar ← IntentarTomarlaestado.cazar ← 3
3: SI presa.casada = 1ENTONCES estado.cazar ← 4SINO estado.cazar ← 2
4: salida.cazar ← Ningunaestado.cazar ← 1
FIN
Robot Depredador (8)Robot Depredador (8)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 22
CONDUCTA ComerCOMIENZO
CASO estado.comer DE1: SI presa.sabor = 1
ENTONCES estado.comer ← 2SINO estado.comer ← 3
2: salida.comer ← Masticarestado.comer ← 1
3: salida.comer ← Ningunaestado.comer ← 1
FIN
Robot Depredador (9)Robot Depredador (9)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 23
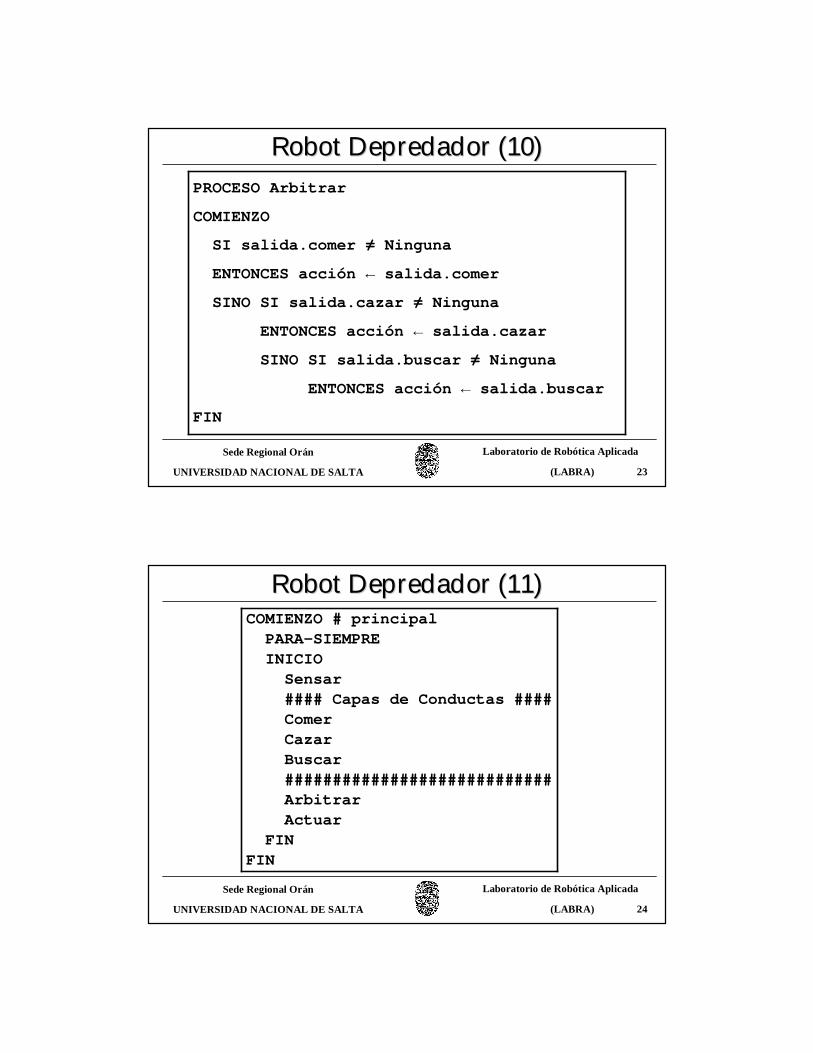
PROCESO Arbitrar
COMIENZO
SI salida.comer ≠ Ninguna
ENTONCES acción ← salida.comer
SINO SI salida.cazar ≠ Ninguna
ENTONCES acción ← salida.cazar
SINO SI salida.buscar ≠ Ninguna
ENTONCES acción ← salida.buscar
FIN
Robot Depredador (10)Robot Depredador (10)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 24
COMIENZO # principalPARA-SIEMPREINICIO
Sensar#### Capas de Conductas ####ComerCazarBuscar############################ArbitrarActuar
FINFIN
Robot Depredador (11)Robot Depredador (11)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 25
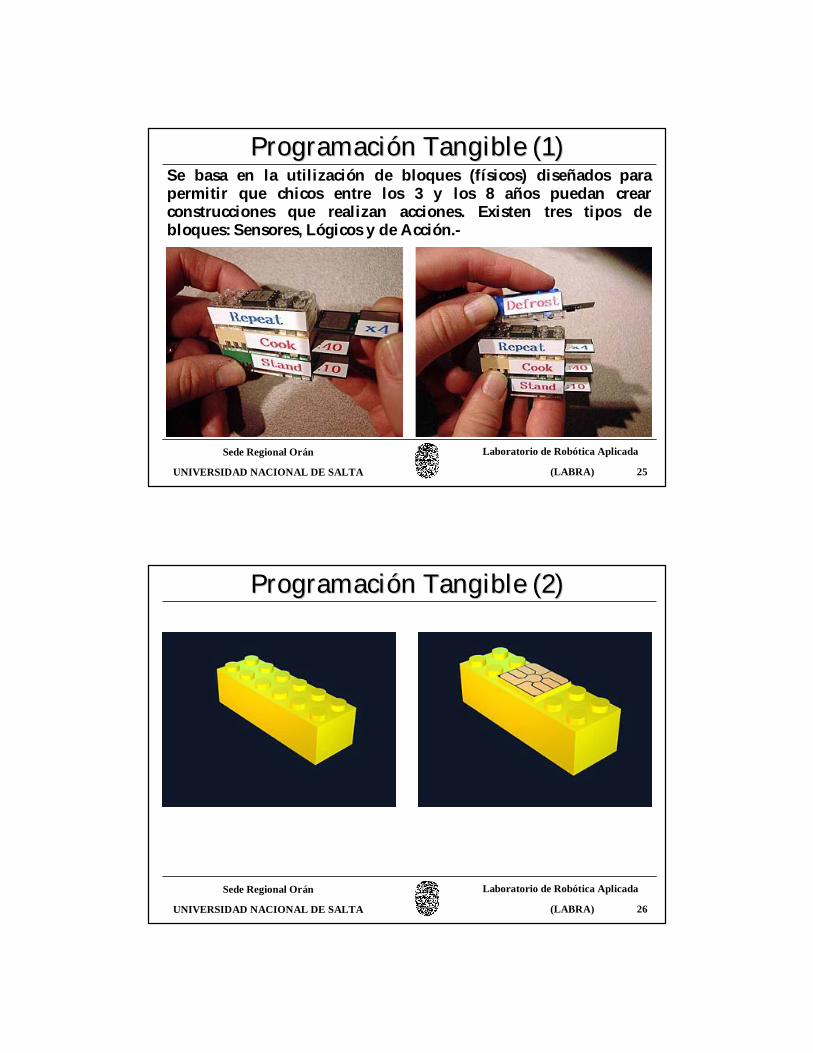
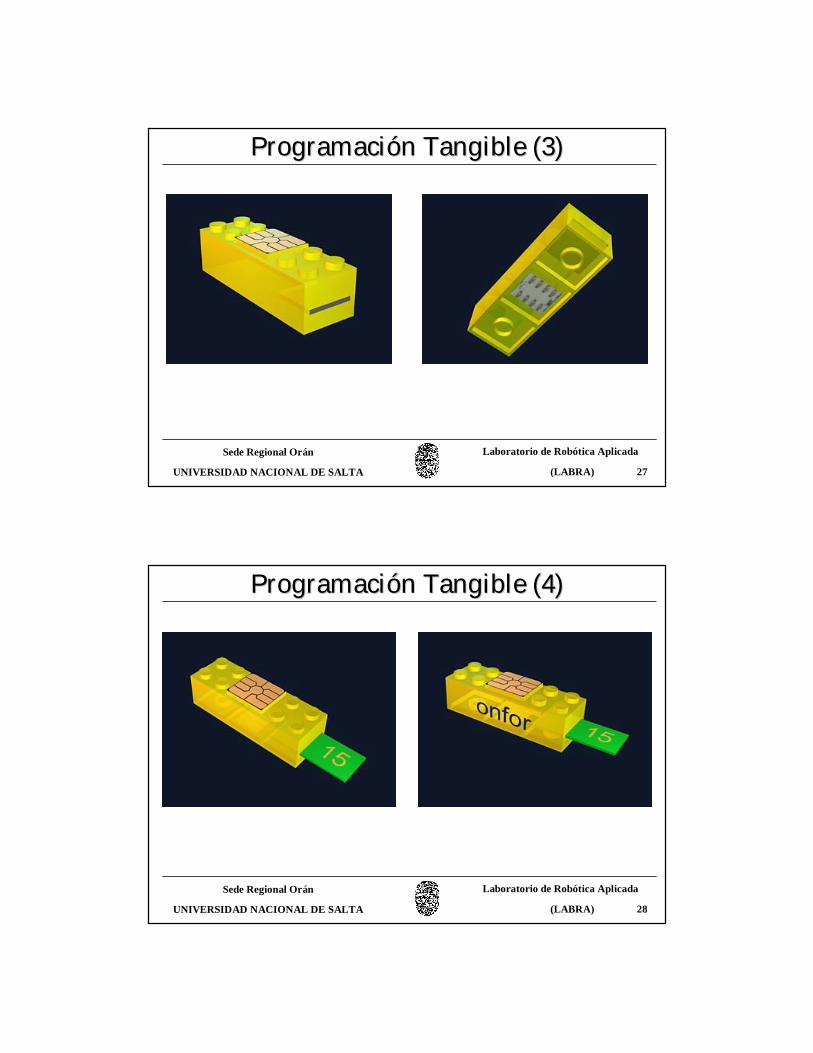
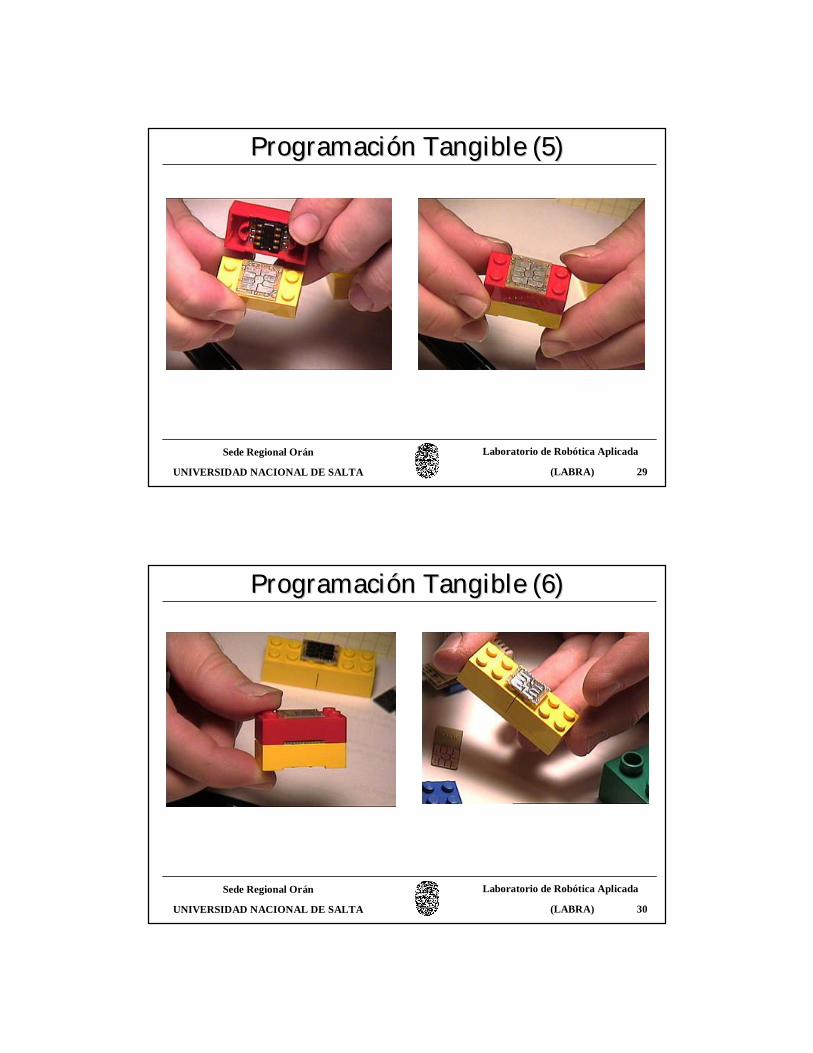
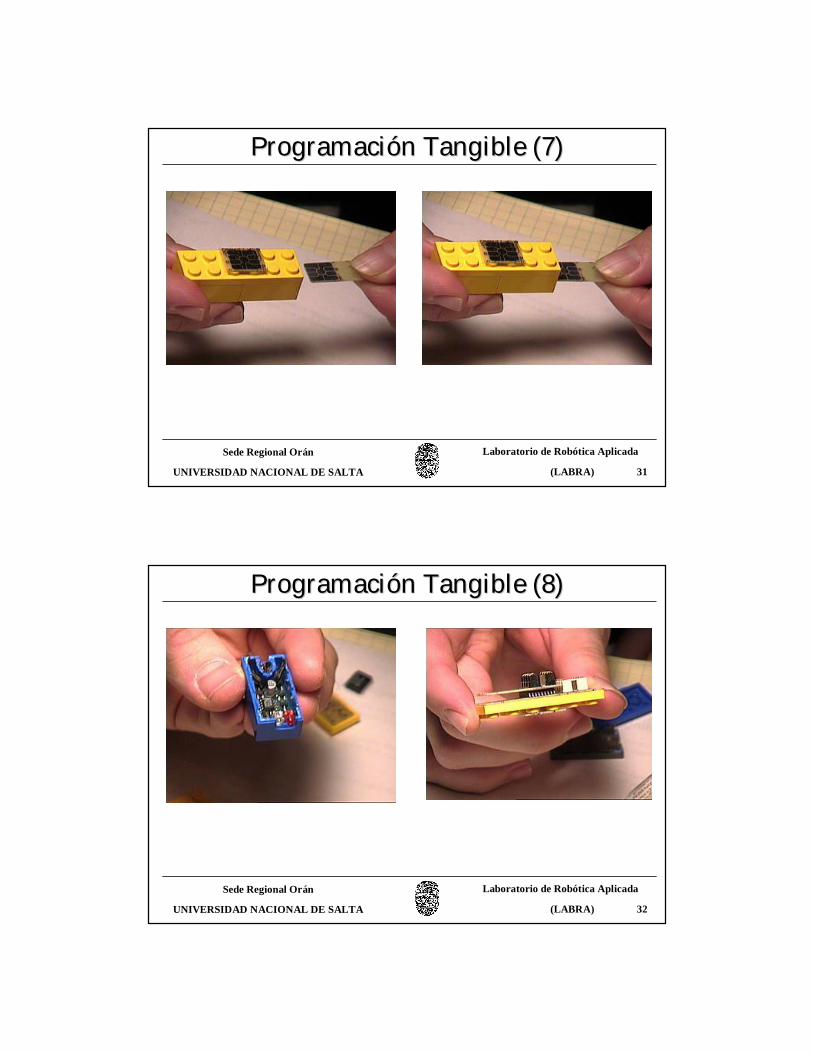
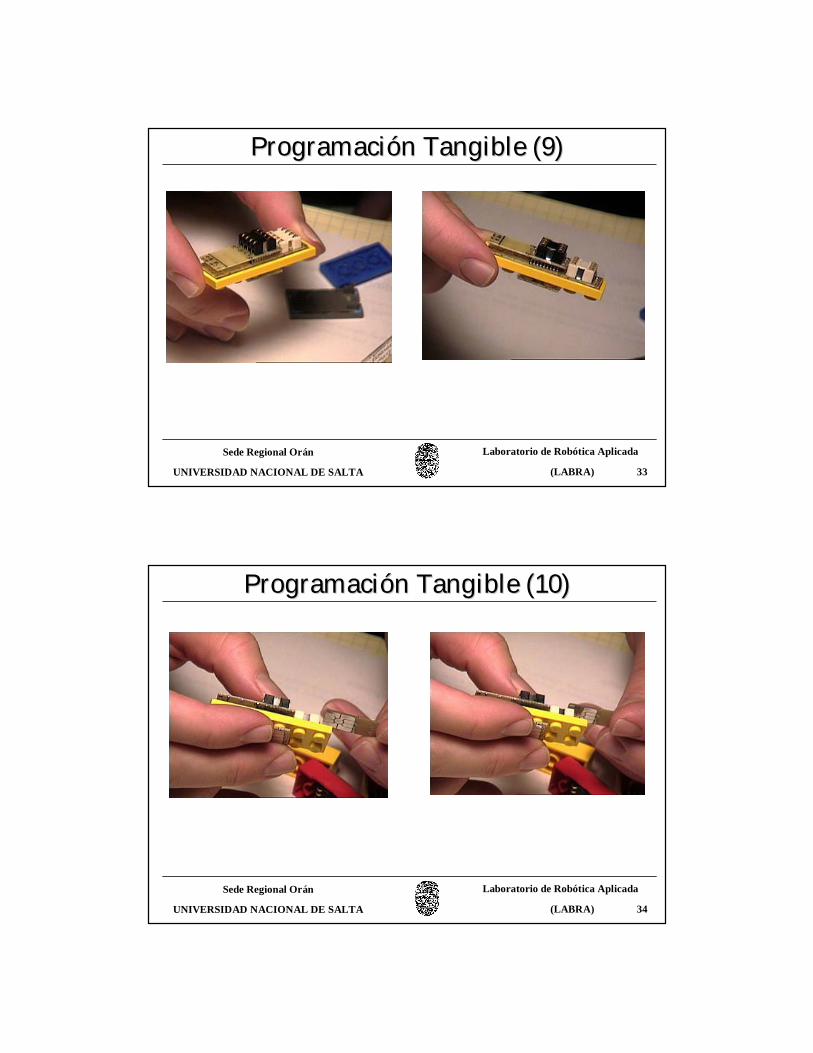
ProgramaciProgramacióón Tangible (1)n Tangible (1)Se basa en la utilización de bloques (físicos) diseñados para permitir que chicos entre los 3 y los 8 años puedan crear construcciones que realizan acciones. Existen tres tipos de bloques: Sensores, Lógicos y de Acción.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 26
ProgramaciProgramacióón Tangible (2)n Tangible (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 27
ProgramaciProgramacióón Tangible (3)n Tangible (3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 28
ProgramaciProgramacióón Tangible (4)n Tangible (4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 29
ProgramaciProgramacióón Tangible (5)n Tangible (5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 30
ProgramaciProgramacióón Tangible (6)n Tangible (6)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 31
ProgramaciProgramacióón Tangible (7)n Tangible (7)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 32
ProgramaciProgramacióón Tangible (8)n Tangible (8)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 33
ProgramaciProgramacióón Tangible (9)n Tangible (9)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 34
ProgramaciProgramacióón Tangible (10)n Tangible (10)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 35
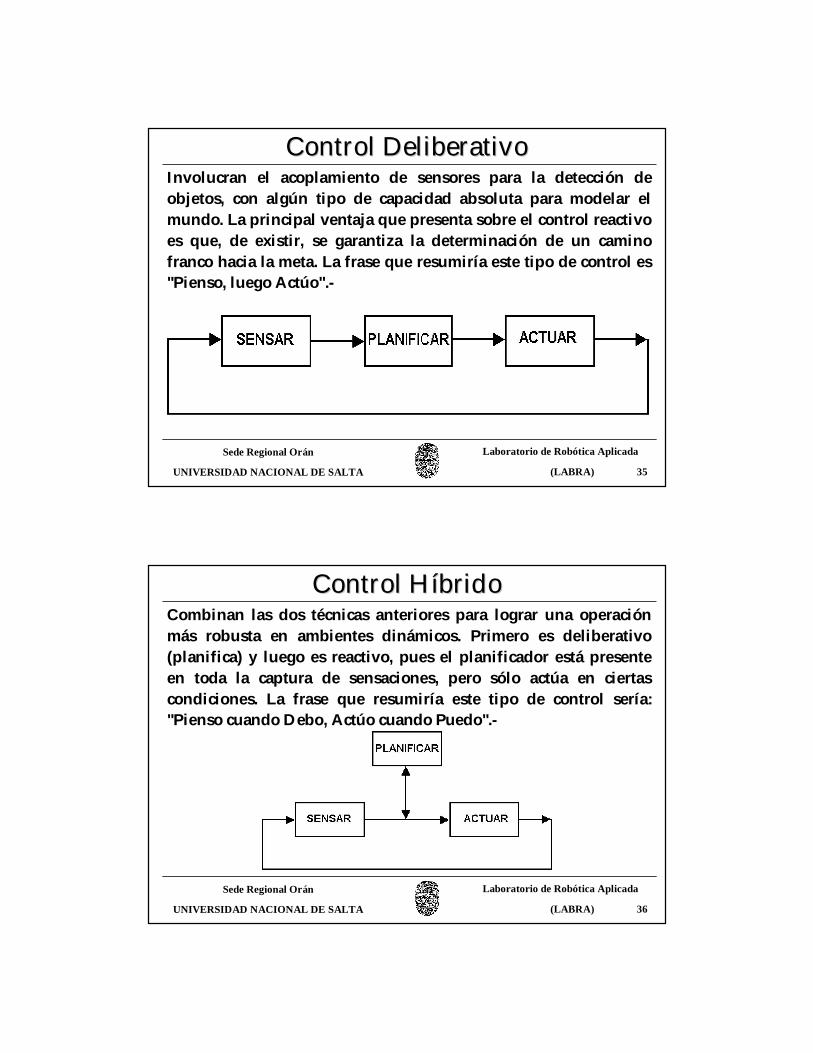
Involucran el acoplamiento de sensores para la detección de objetos, con algún tipo de capacidad absoluta para modelar el mundo. La principal ventaja que presenta sobre el control reactivo es que, de existir, se garantiza la determinación de un camino franco hacia la meta. La frase que resumiría este tipo de control es "Pienso, luego Actúo".-
Control DeliberativoControl Deliberativo
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 36
Combinan las dos técnicas anteriores para lograr una operación más robusta en ambientes dinámicos. Primero es deliberativo (planifica) y luego es reactivo, pues el planificador está presente en toda la captura de sensaciones, pero sólo actúa en ciertas condiciones. La frase que resumiría este tipo de control sería: "Pienso cuando Debo, Actúo cuando Puedo".-
Control HControl Hííbridobrido
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 37
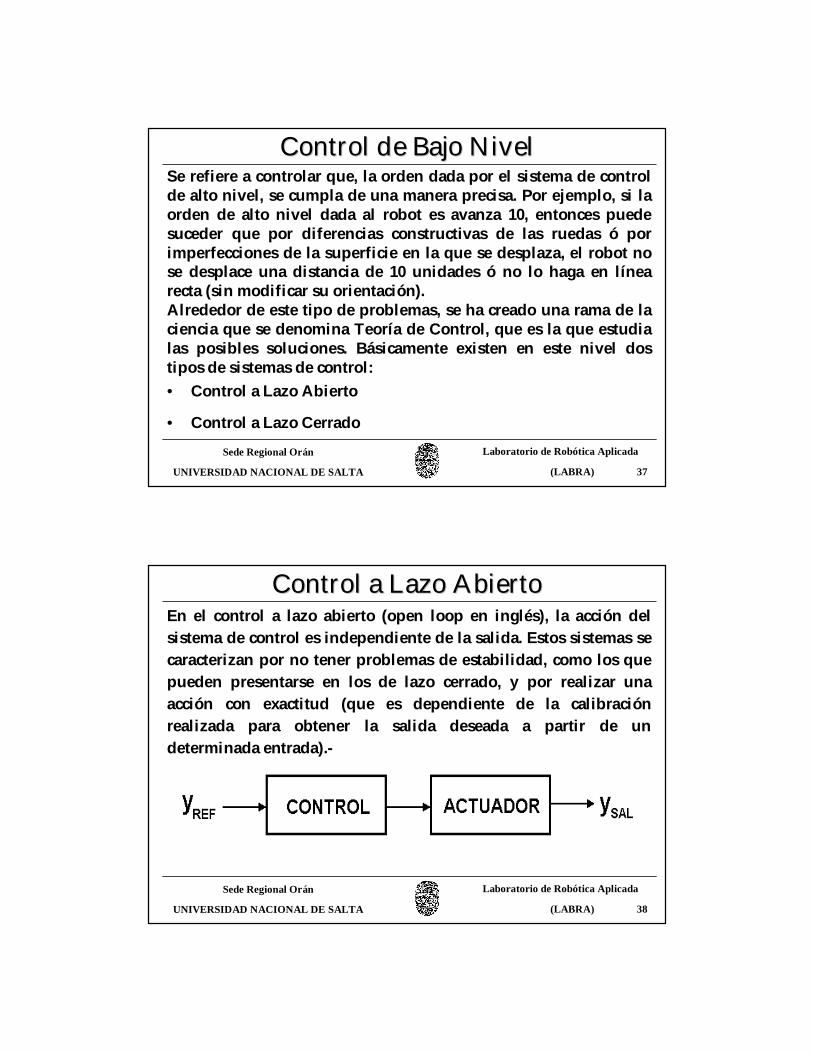
Control de Bajo NivelControl de Bajo NivelSe refiere a controlar que, la orden dada por el sistema de control de alto nivel, se cumpla de una manera precisa. Por ejemplo, si la orden de alto nivel dada al robot es avanza 10, entonces puede suceder que por diferencias constructivas de las ruedas ó por imperfecciones de la superficie en la que se desplaza, el robot no se desplace una distancia de 10 unidades ó no lo haga en línea recta (sin modificar su orientación).Alrededor de este tipo de problemas, se ha creado una rama de laciencia que se denomina Teoría de Control, que es la que estudia las posibles soluciones. Básicamente existen en este nivel dos tipos de sistemas de control:• Control a Lazo Abierto
• Control a Lazo Cerrado
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 38
Control a Lazo AbiertoControl a Lazo AbiertoEn el control a lazo abierto (open loop en inglés), la acción del sistema de control es independiente de la salida. Estos sistemas se caracterizan por no tener problemas de estabilidad, como los quepueden presentarse en los de lazo cerrado, y por realizar una acción con exactitud (que es dependiente de la calibración realizada para obtener la salida deseada a partir de un determinada entrada).-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 39
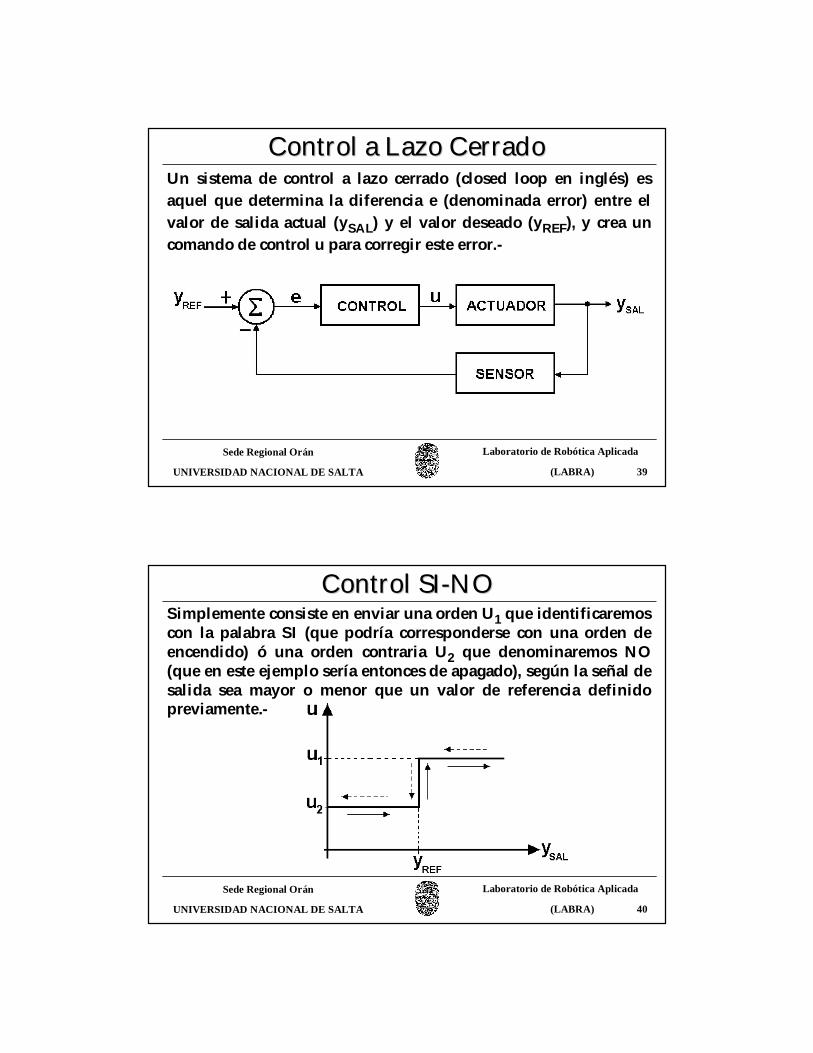
Control a Lazo CerradoControl a Lazo CerradoUn sistema de control a lazo cerrado (closed loop en inglés) es aquel que determina la diferencia e (denominada error) entre el valor de salida actual (ySAL) y el valor deseado (yREF), y crea un comando de control u para corregir este error.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 40
Control SIControl SI--NONOSimplemente consiste en enviar una orden U1 que identificaremos con la palabra SI (que podría corresponderse con una orden de encendido) ó una orden contraria U2 que denominaremos NO (que en este ejemplo sería entonces de apagado), según la señal de salida sea mayor o menor que un valor de referencia definido previamente.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 41
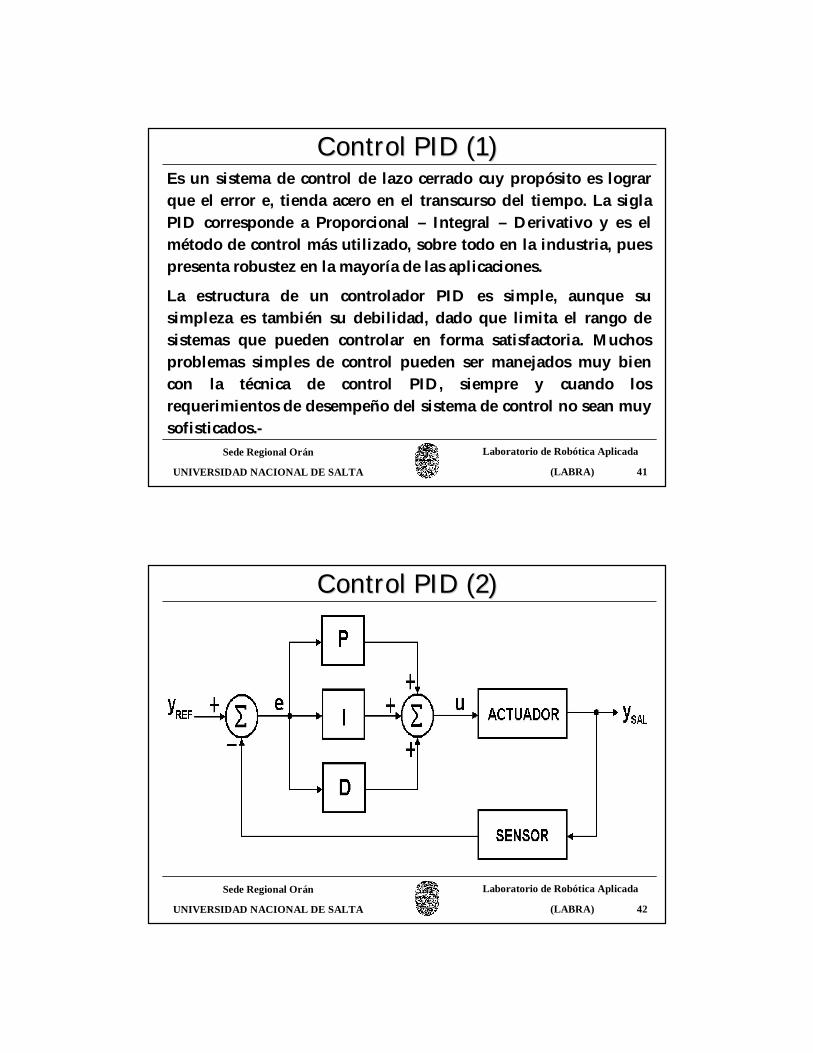
Control PID (1)Control PID (1)Es un sistema de control de lazo cerrado cuy propósito es lograr que el error e, tienda acero en el transcurso del tiempo. La sigla PID corresponde a Proporcional – Integral – Derivativo y es el método de control más utilizado, sobre todo en la industria, pues presenta robustez en la mayoría de las aplicaciones.
La estructura de un controlador PID es simple, aunque su simpleza es también su debilidad, dado que limita el rango de sistemas que pueden controlar en forma satisfactoria. Muchos problemas simples de control pueden ser manejados muy bien con la técnica de control PID, siempre y cuando los requerimientos de desempeño del sistema de control no sean muy sofisticados.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 42
Control PID (2)Control PID (2)

Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 43
P: Es el término proporcional, pues genera una acción de controlcorrectivo proporcional al error. En otras palabras, a un error mayor, entonces mayor será la corrección.
en donde Kp es la gananacia proporcional y e(t) es el error en el instante t (en este momento).-
Control PID (3)Control PID (3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 44
I: Es el término proporcional, pues genera una acción de controlcorrectivo proporcional al error. En otras palabras, a un error mayor, entonces mayor será la corrección.
en donde Kp es la gananacia proporcional y e(t) es el error en el instante t (en este momento).-
Control PID (4)Control PID (4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 45
I: Es el término integral, que genera una corrección proporcional al error acumulado, es decir, a la integral del error a lo largo del tiempo. Este término produce una corrección en base al tiempo en que el error estuvo presente (la historia pasada). Esto nos asegura que a mayor tiempo que el error ha estado presente, mayor será la correción.-
Control PID (4)Control PID (4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 46
• D: Es el término derivativo, que genera una acción de control proporcional a la variación del error. Esto es, la acción de corrección está relacionada con la derivada del error con respecto al tiempo. Es decir que la acción derivativa tiene un efecto predictivo, pues puede anticipar a futuro mayor velocidad de variación del error, mayor será la acción de correción.-
Control PID (5)Control PID (5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 47
P: Es el término proporcional, pues genera una acción de controlcorrectivo proporcional al error. En otras palabras, a un error mayor, entonces mayor será la corrección.
en donde Kp es la gananacia proporcional y e(t) es el error en el instante t (en este momento).-
Control PID (5)Control PID (5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 48
Algoritmo de Control PIDAlgoritmo de Control PIDeANT ← 0; I ← 0
REPETIR
e ← yREF - ySALP ← Kp * e
I ← I + Ki * e * dt
D ← (Kd/dt) * (e – eANT)
u ← P + I + D
esperar(dt)
eANT ← e
HASTA-QUE (e = 0)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 49
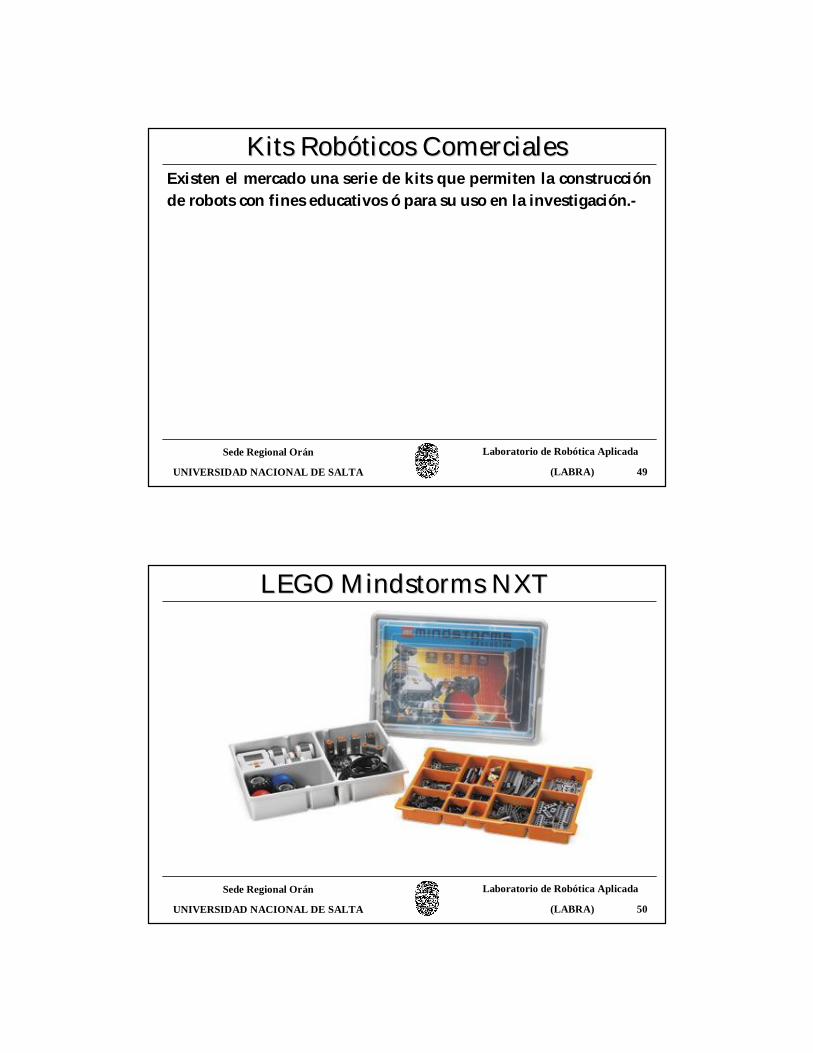
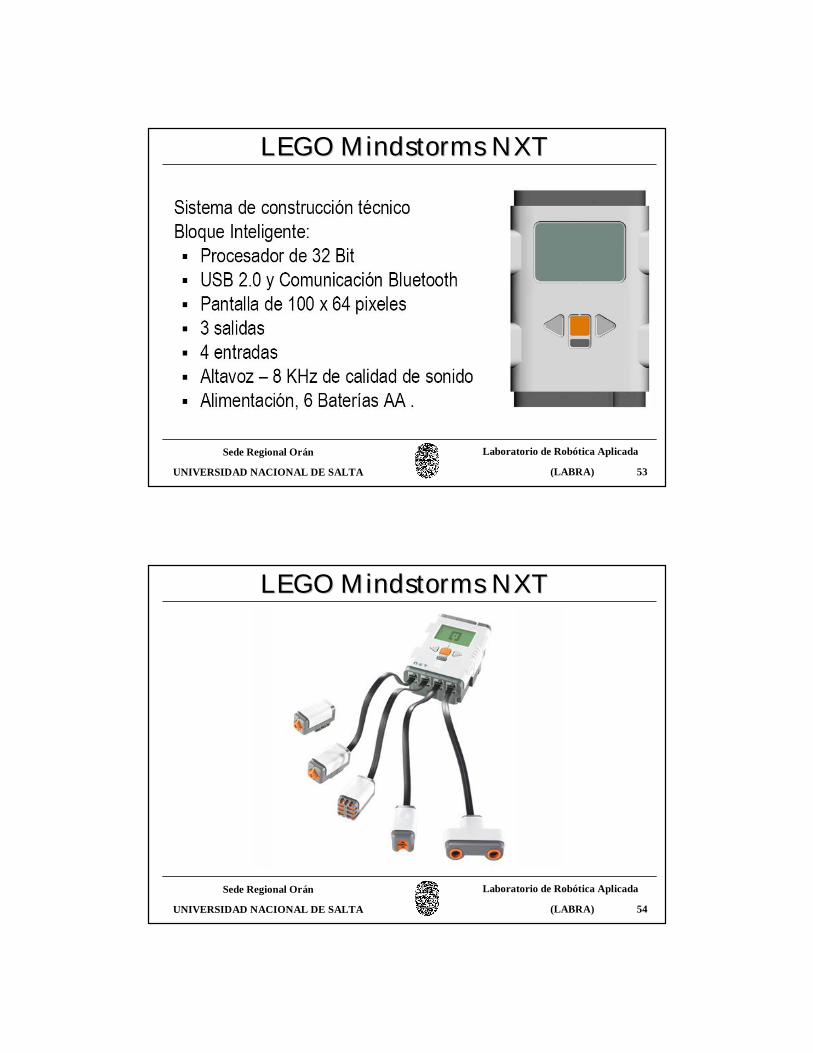
Kits RobKits Robóóticos Comercialesticos ComercialesExisten el mercado una serie de kits que permiten la construcción de robots con fines educativos ó para su uso en la investigación.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 50
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 51
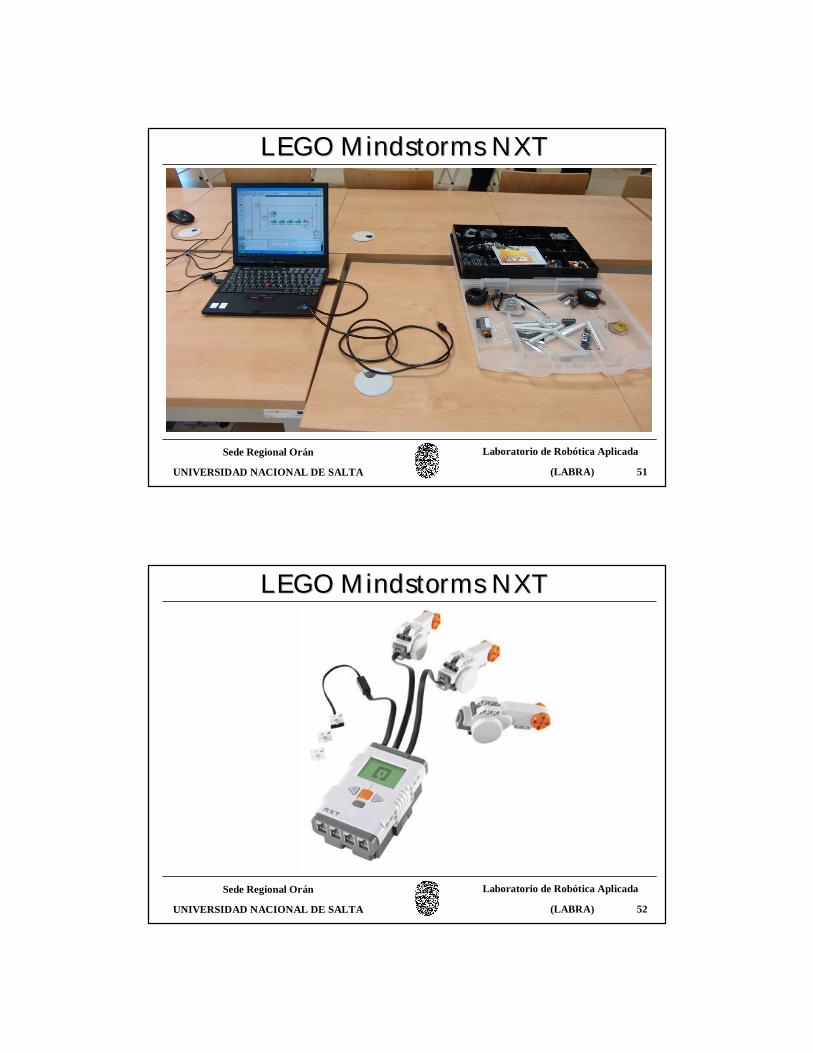
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 52
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 53
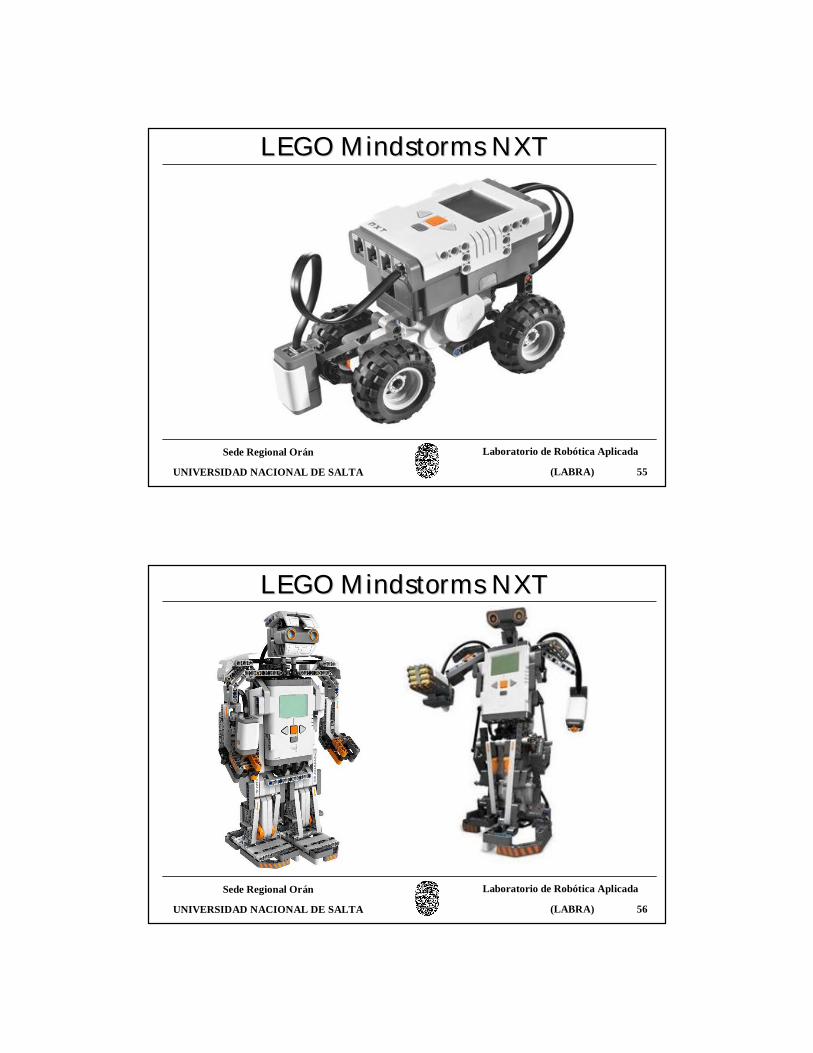
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 54
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 55
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 56
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 57
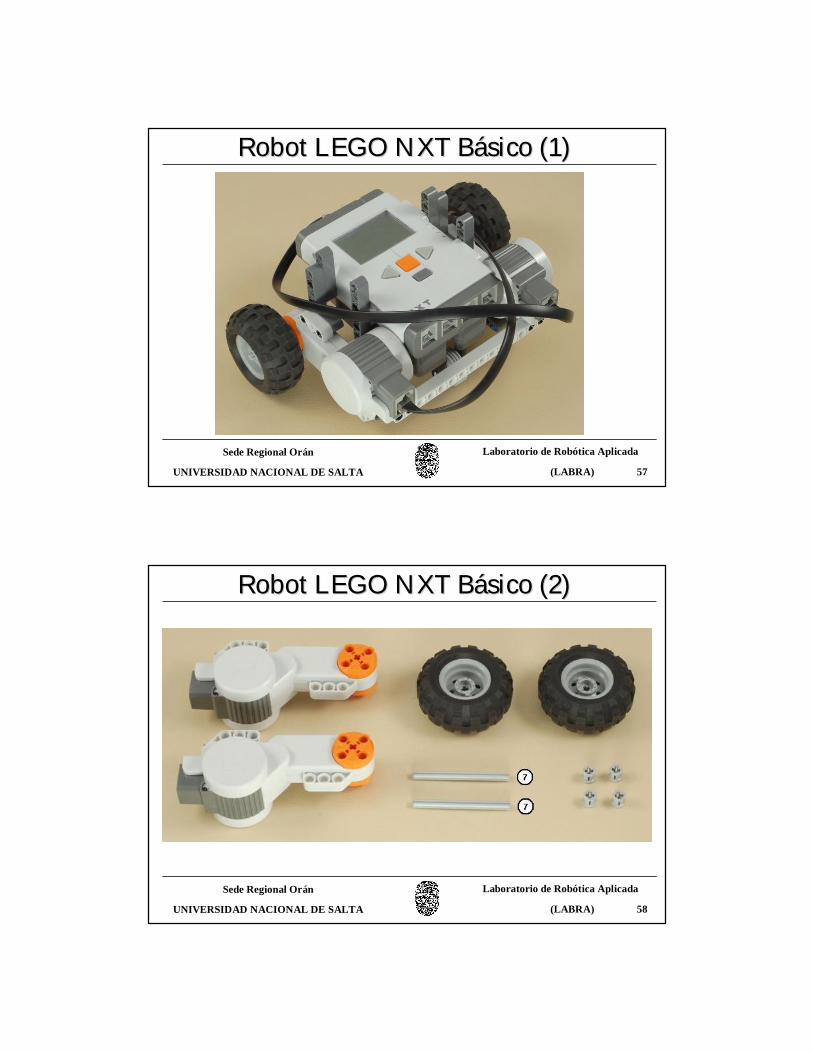
Robot LEGO NXT BRobot LEGO NXT Báásico (1)sico (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 58
Robot LEGO NXT BRobot LEGO NXT Báásico (2)sico (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 59
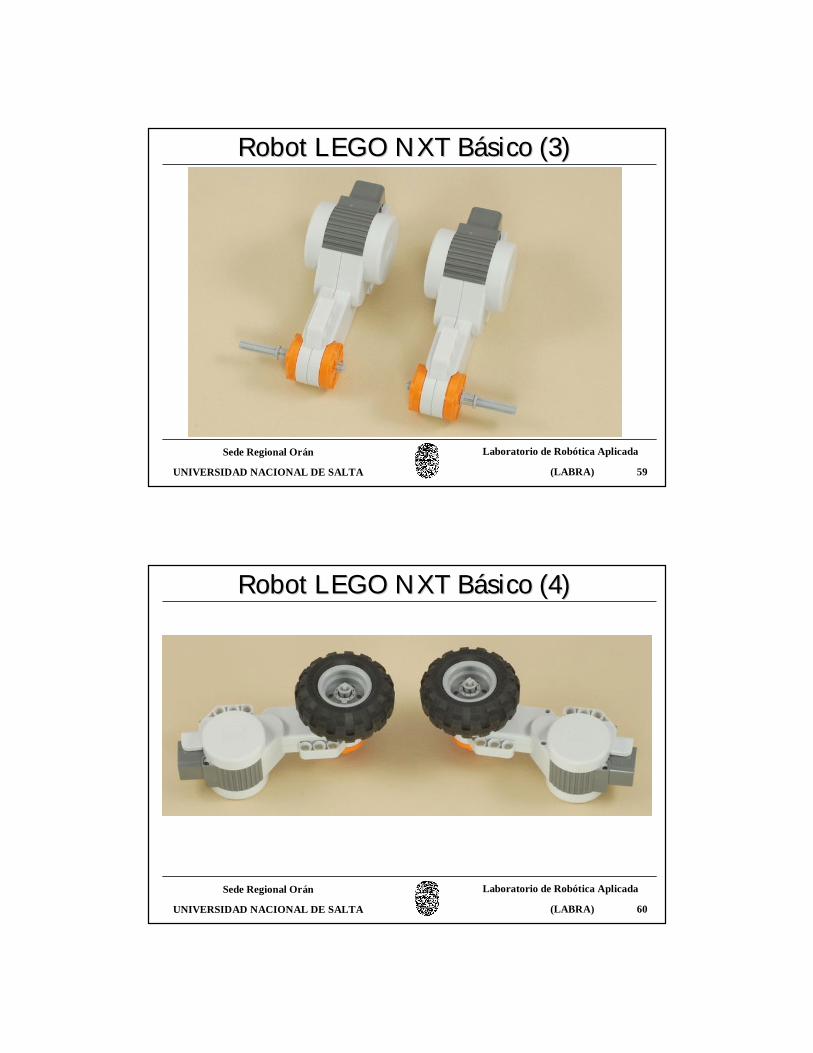
Robot LEGO NXT BRobot LEGO NXT Báásico (3)sico (3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 60
Robot LEGO NXT BRobot LEGO NXT Báásico (4)sico (4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 61
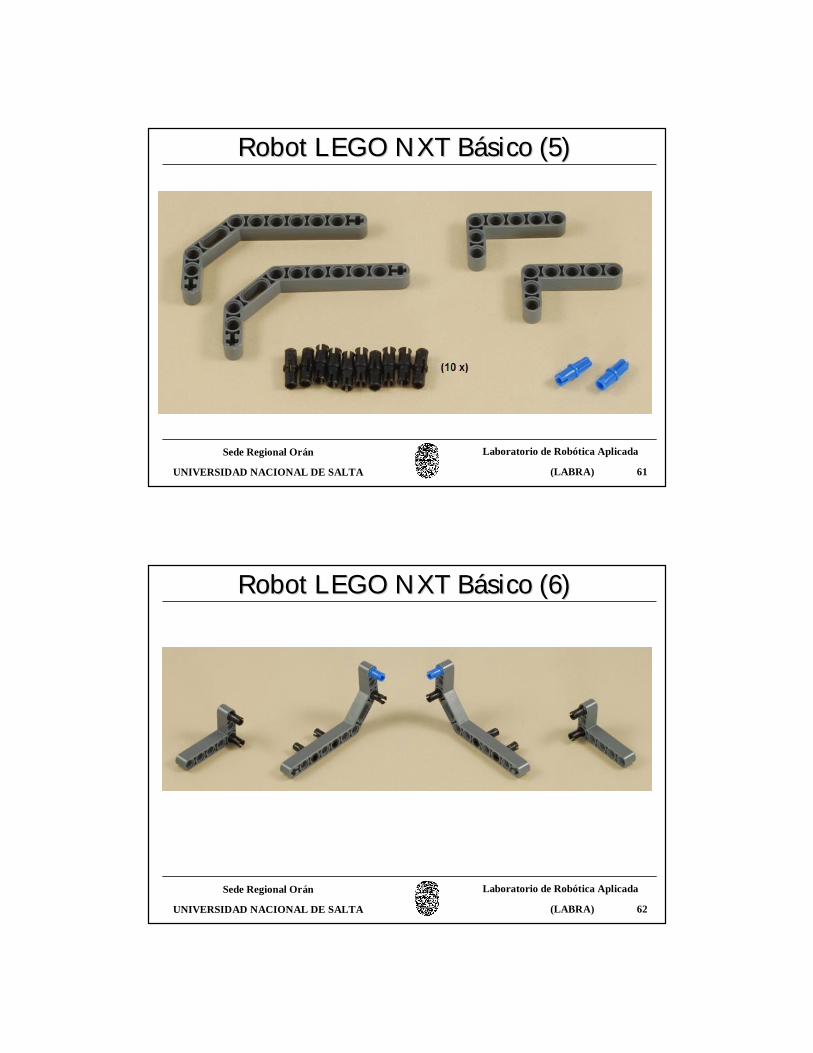
Robot LEGO NXT BRobot LEGO NXT Báásico (5)sico (5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 62
Robot LEGO NXT BRobot LEGO NXT Báásico (6)sico (6)

Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 63
Robot LEGO NXT BRobot LEGO NXT Báásico (7)sico (7)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 64
Robot LEGO NXT BRobot LEGO NXT Báásico (8)sico (8)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 65
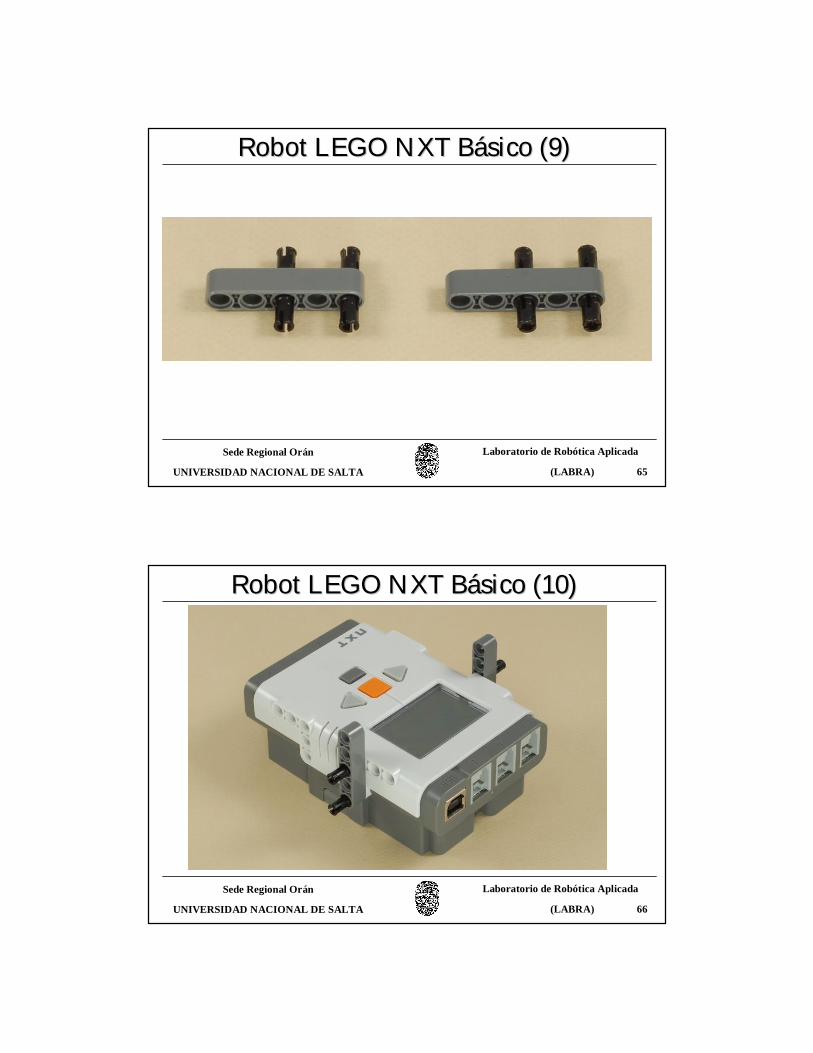
Robot LEGO NXT BRobot LEGO NXT Báásico (9)sico (9)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 66
Robot LEGO NXT BRobot LEGO NXT Báásico (10)sico (10)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 67
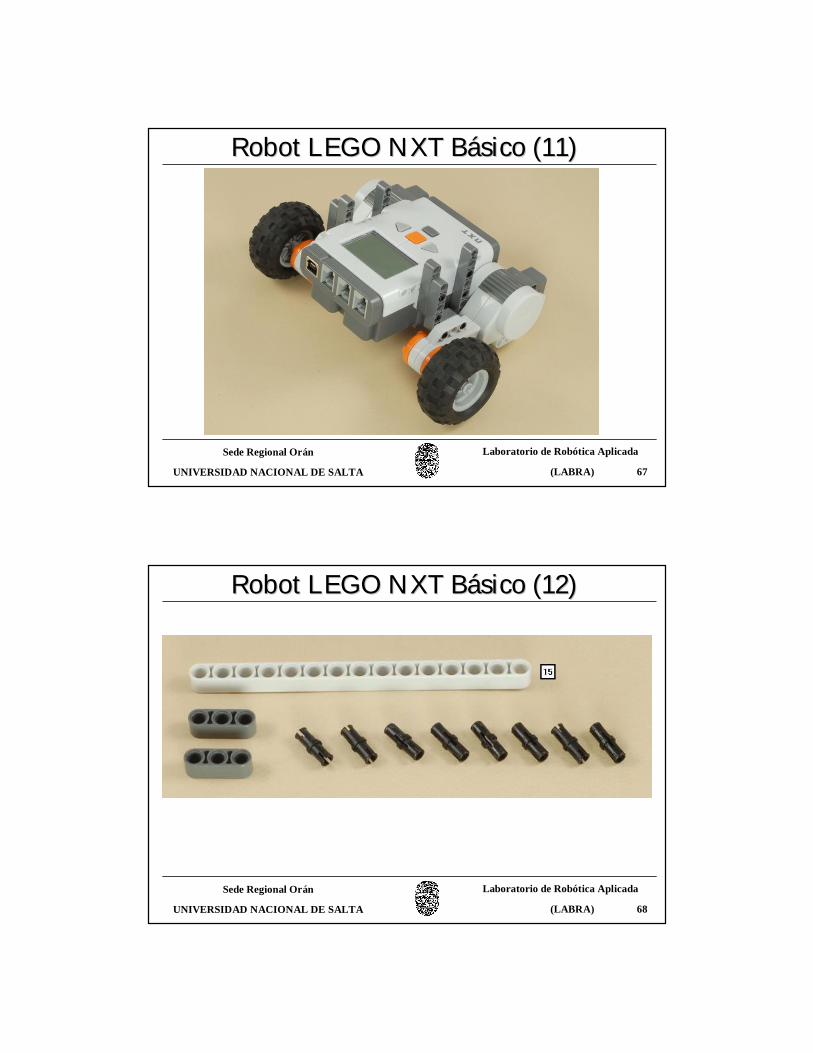
Robot LEGO NXT BRobot LEGO NXT Báásico (11)sico (11)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 68
Robot LEGO NXT BRobot LEGO NXT Báásico (12)sico (12)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 69
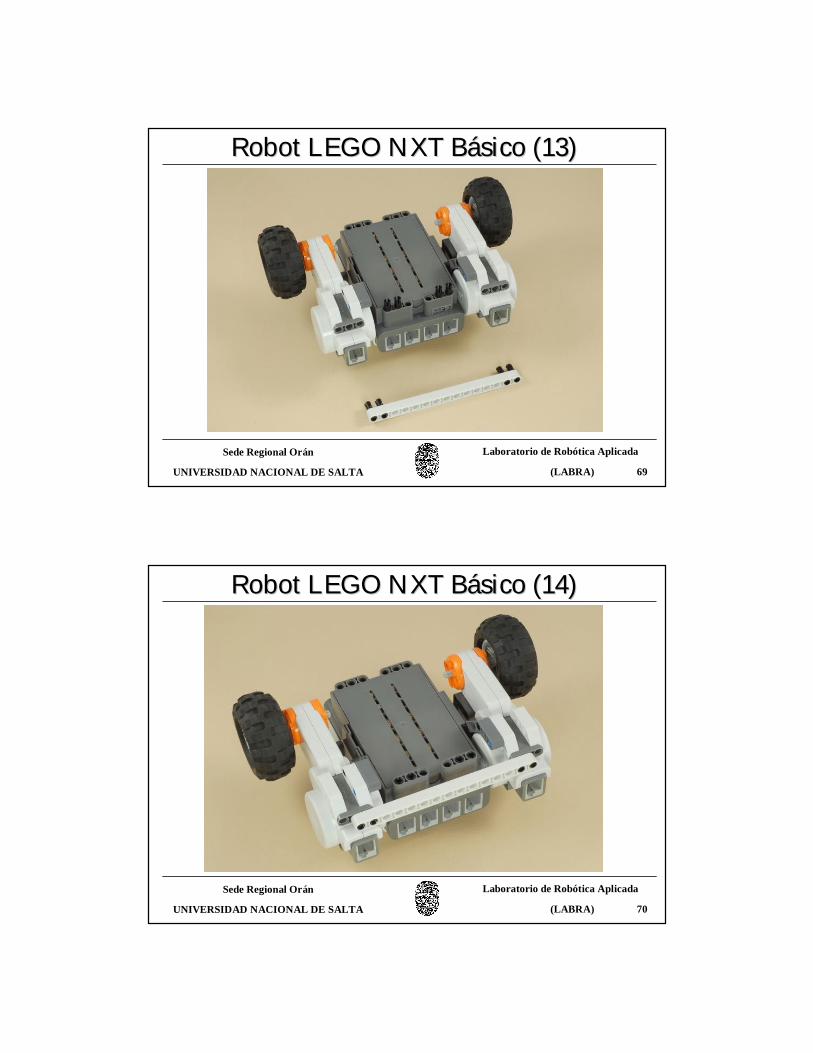
Robot LEGO NXT BRobot LEGO NXT Báásico (13)sico (13)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 70
Robot LEGO NXT BRobot LEGO NXT Báásico (14)sico (14)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 71
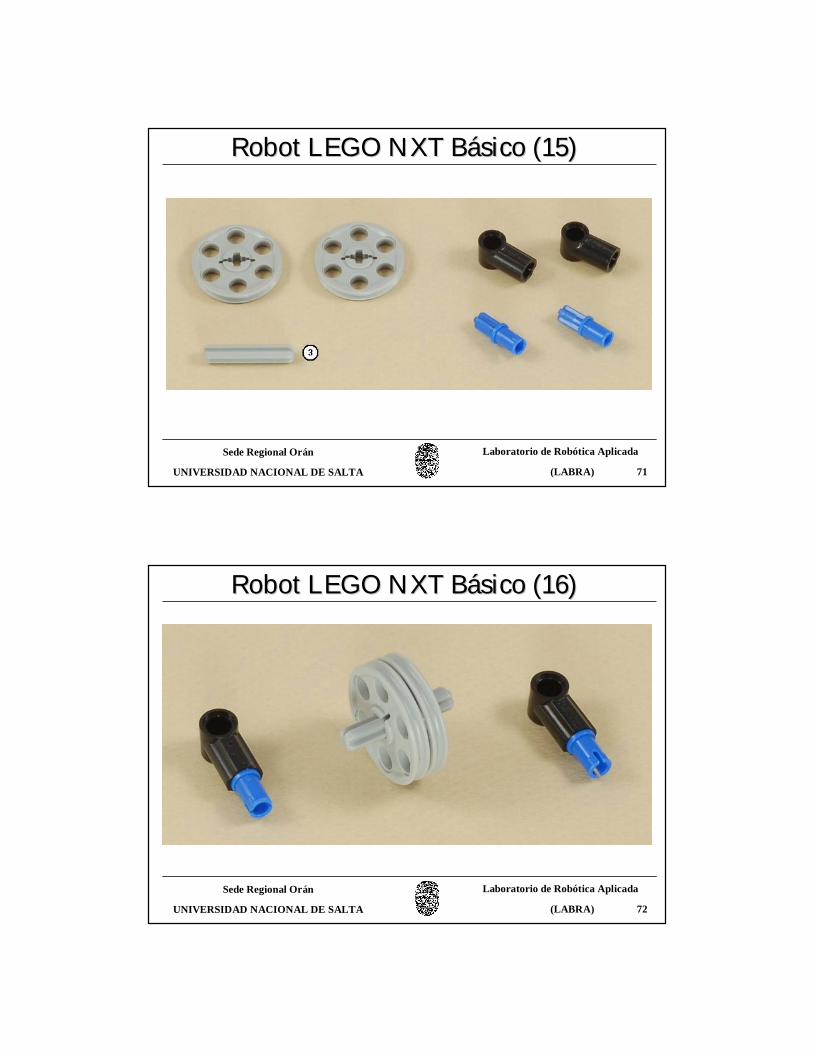
Robot LEGO NXT BRobot LEGO NXT Báásico (15)sico (15)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 72
Robot LEGO NXT BRobot LEGO NXT Báásico (16)sico (16)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 73
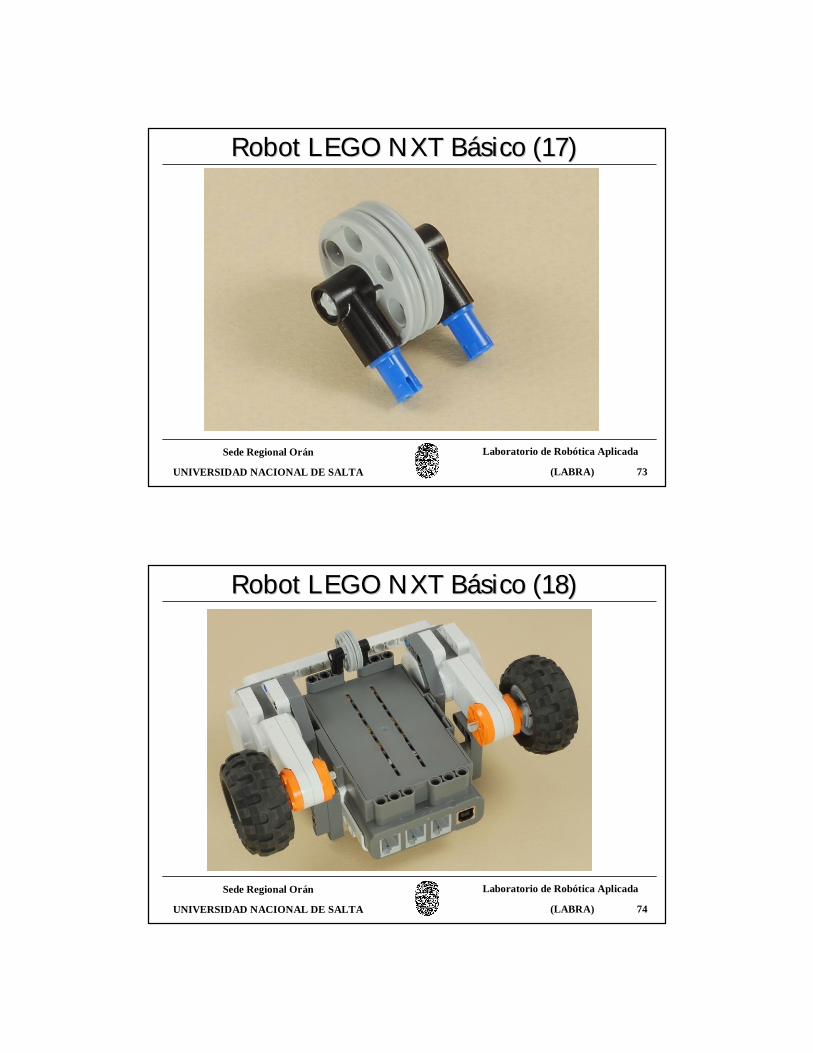
Robot LEGO NXT BRobot LEGO NXT Báásico (17)sico (17)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 74
Robot LEGO NXT BRobot LEGO NXT Báásico (18)sico (18)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 75
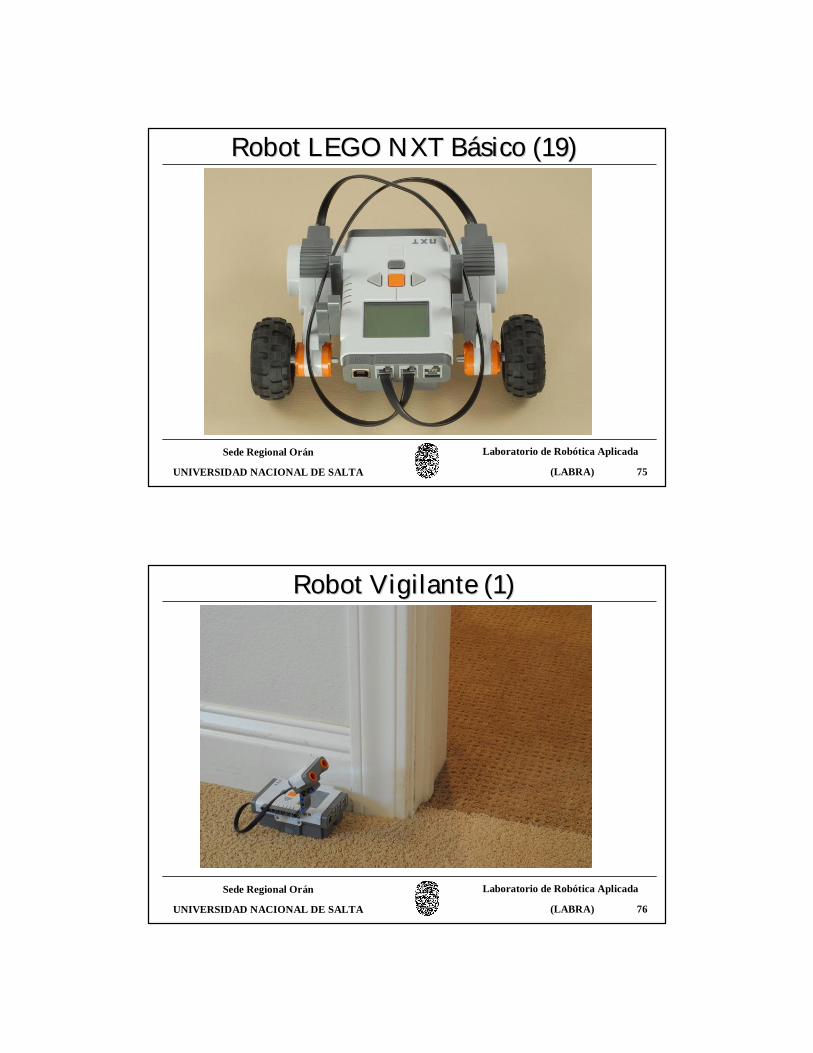
Robot LEGO NXT BRobot LEGO NXT Báásico (19)sico (19)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 76
Robot Vigilante (1)Robot Vigilante (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 77
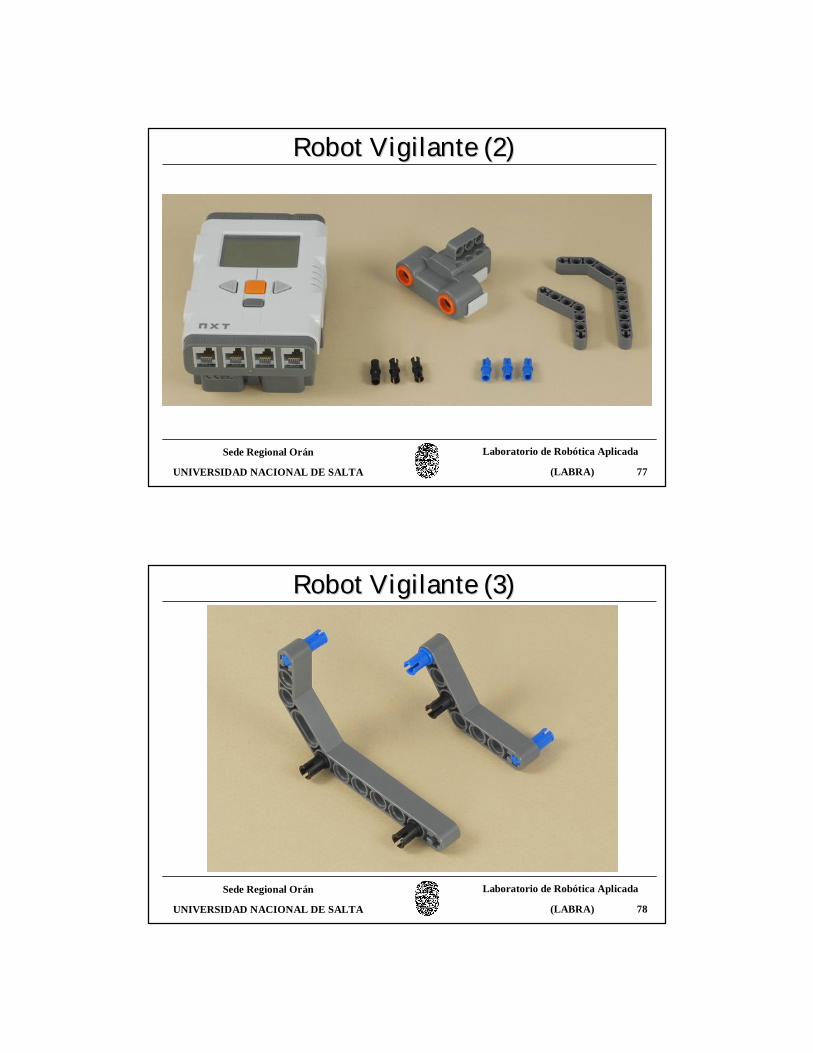
Robot Vigilante (2)Robot Vigilante (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 78
Robot Vigilante (3)Robot Vigilante (3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 79
Robot Vigilante (4)Robot Vigilante (4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 80
Robot Vigilante (5)Robot Vigilante (5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 81
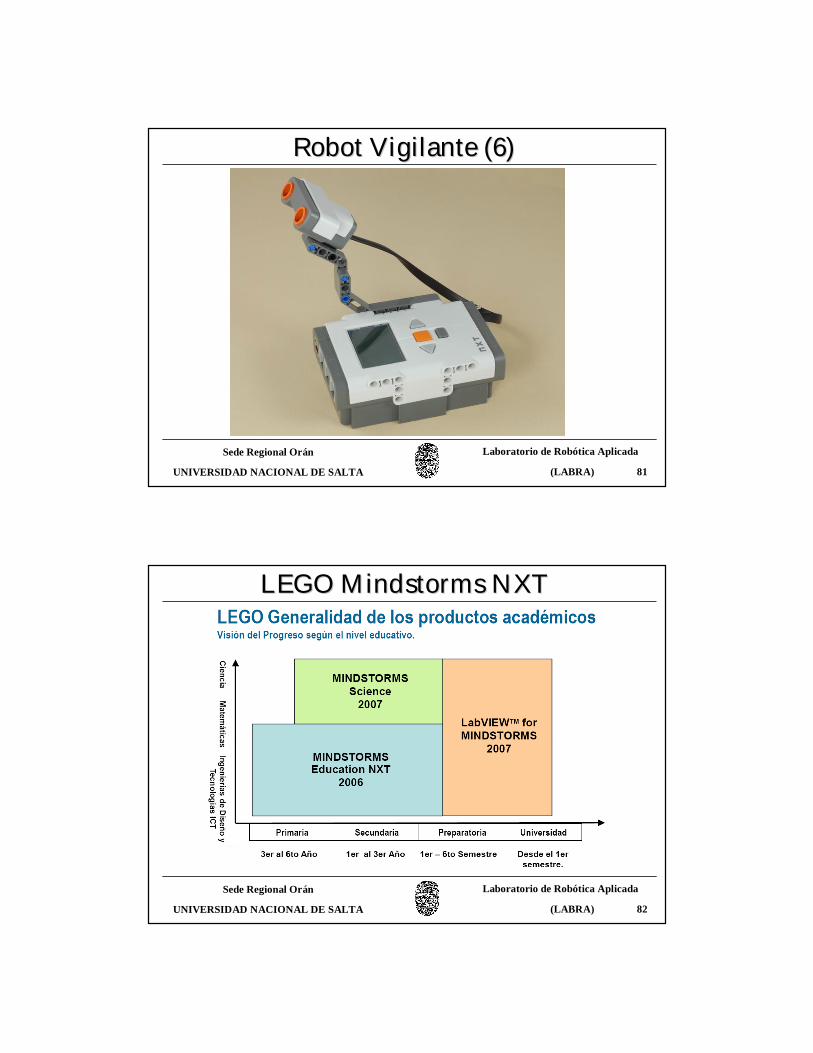
Robot Vigilante (6)Robot Vigilante (6)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 82
LEGO LEGO MindstormsMindstorms NXTNXT
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 83
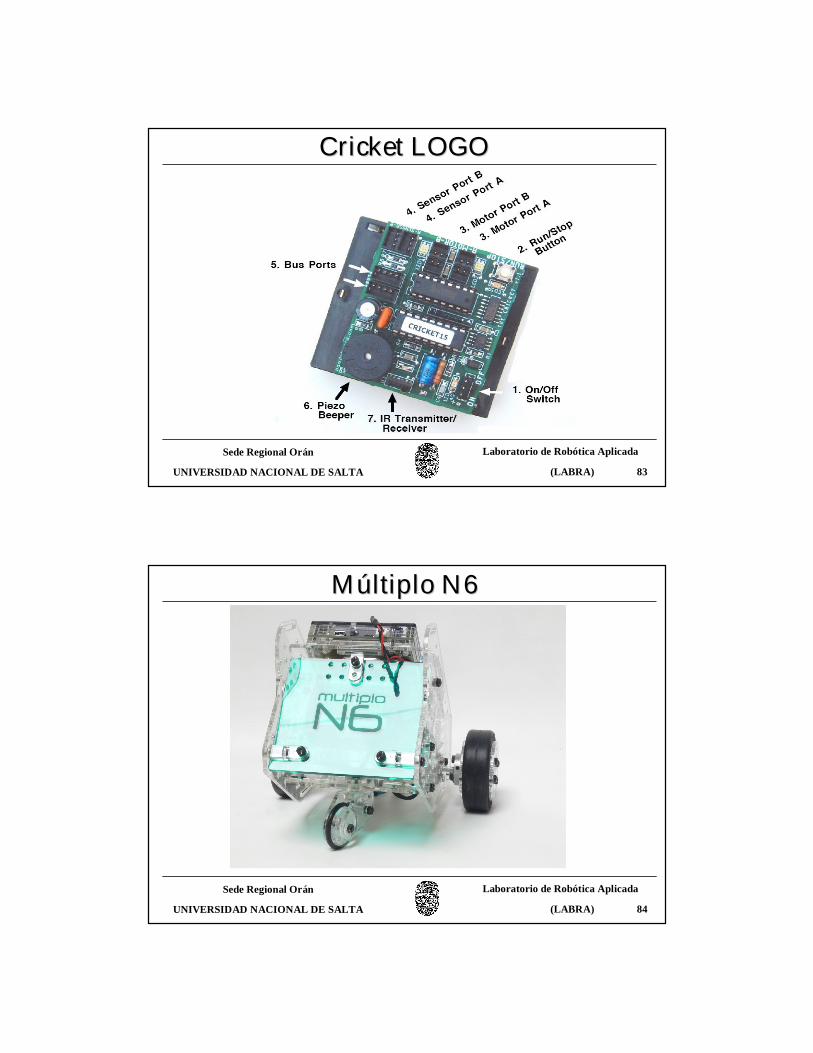
Cricket LOGOCricket LOGO
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 84
MMúúltiplo N6ltiplo N6
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 85
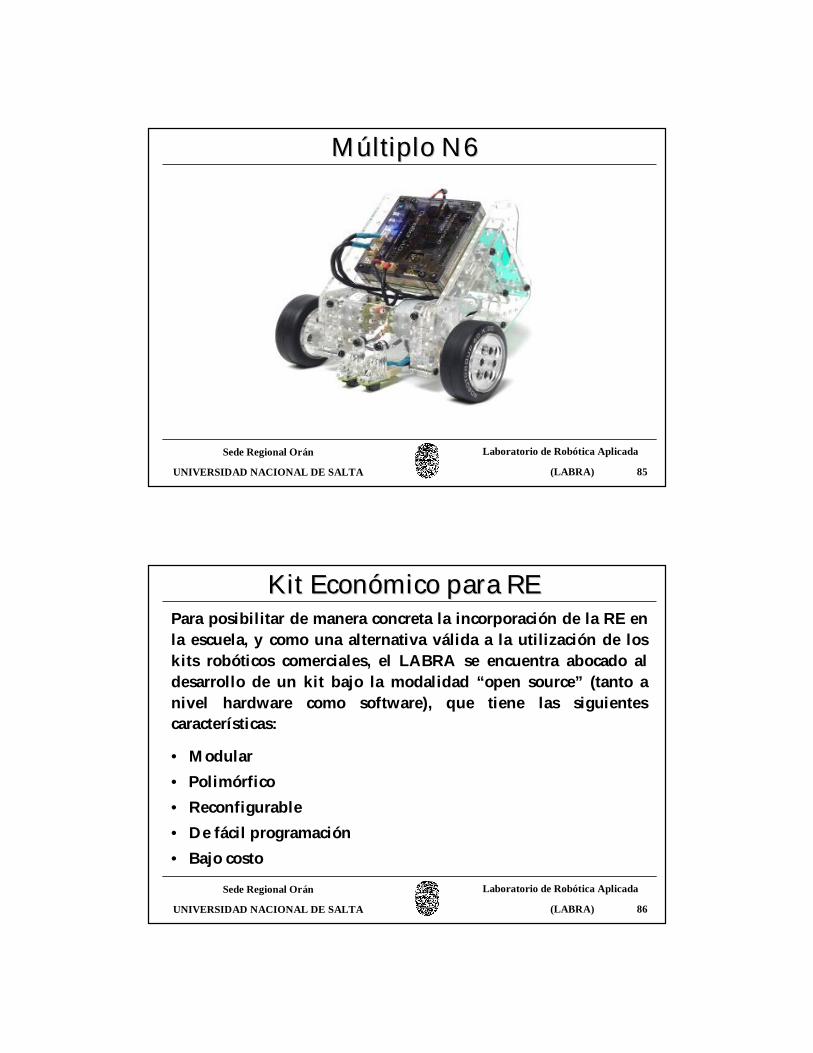
MMúúltiplo N6ltiplo N6
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 86
KitKit EconEconóómico para REmico para REPara posibilitar de manera concreta la incorporación de la RE en la escuela, y como una alternativa válida a la utilización de los kits robóticos comerciales, el LABRA se encuentra abocado al desarrollo de un kit bajo la modalidad “open source” (tanto a nivel hardware como software), que tiene las siguientes características:
• Modular• Polimórfico• Reconfigurable• De fácil programación• Bajo costo

Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 87
La Robot MARGARITALa Robot MARGARITA
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 88
LEGO NXT vs. MARGOT 1.0LEGO NXT vs. MARGOT 1.0
u$s 1.000 u$s 100
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 89
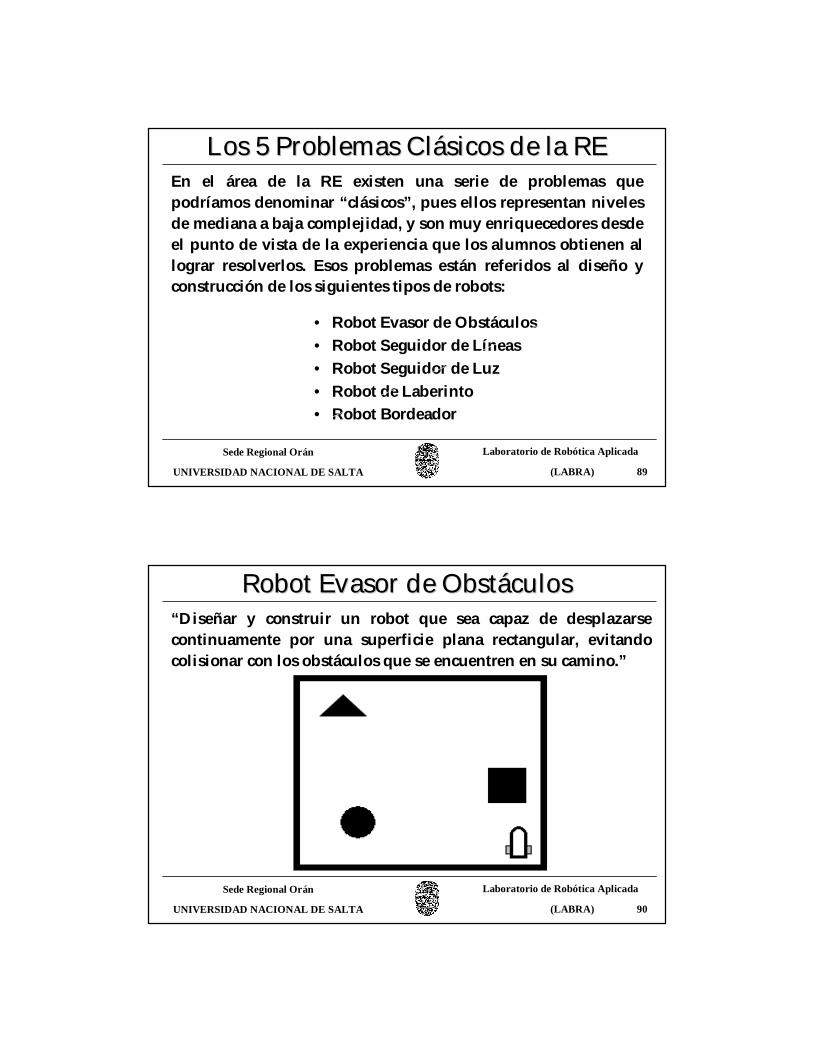
En el área de la RE existen una serie de problemas que podríamos denominar “clásicos”, pues ellos representan niveles de mediana a baja complejidad, y son muy enriquecedores desde el punto de vista de la experiencia que los alumnos obtienen al lograr resolverlos. Esos problemas están referidos al diseño y construcción de los siguientes tipos de robots:
Los 5 Problemas ClLos 5 Problemas Cláásicos de la REsicos de la RE
• Robot Evasor de Obstáculos• Robot Seguidor de Líneas• Robot Seguidor de Luz• Robot de Laberinto• Robot Bordeador
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 90
“Diseñar y construir un robot que sea capaz de desplazarse continuamente por una superficie plana rectangular, evitando colisionar con los obstáculos que se encuentren en su camino.”
Robot Evasor de ObstRobot Evasor de Obstááculosculos
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 91
“Diseñar y construir un robot que sea capaz de desplazarse continuamente por una superficie plana rectangular, evitando colisionar con los obstáculos que se encuentren en su camino.”
Robot Evasor de ObstRobot Evasor de Obstááculos (1)culos (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 92
Robot Evasor de ObstRobot Evasor de Obstááculos (2)culos (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 93
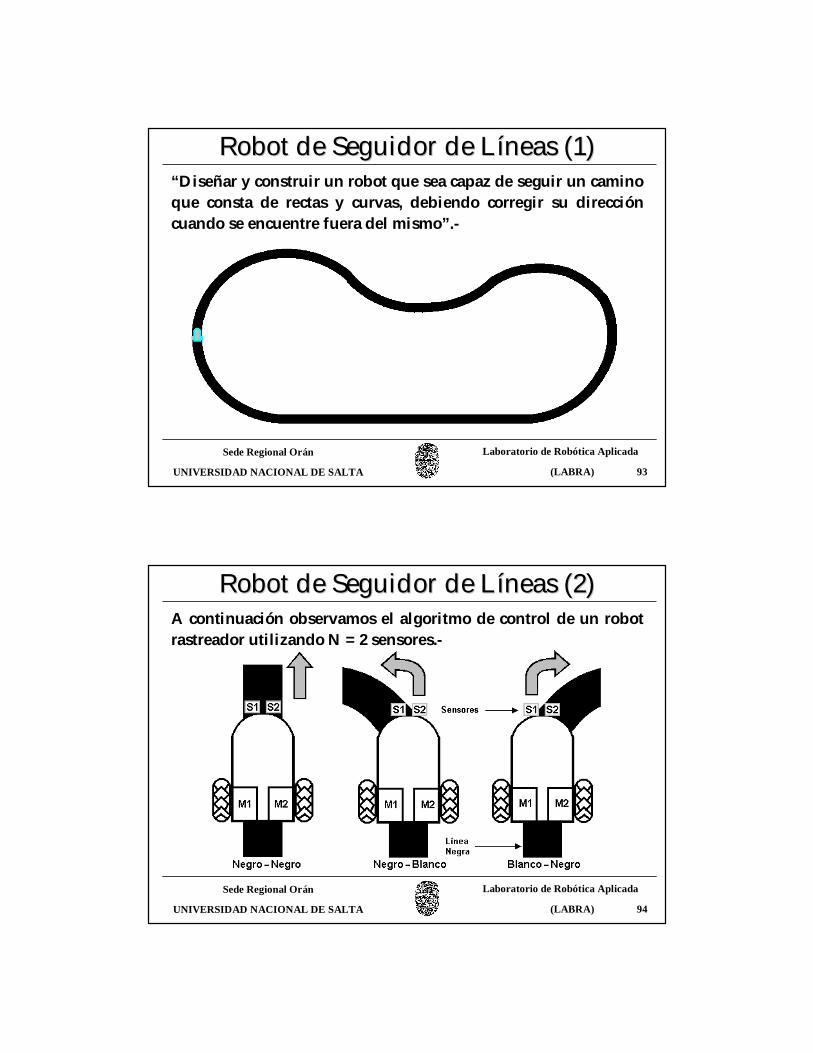
“Diseñar y construir un robot que sea capaz de seguir un camino que consta de rectas y curvas, debiendo corregir su dirección cuando se encuentre fuera del mismo”.-
Robot de Seguidor de LRobot de Seguidor de Lííneas (1)neas (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 94
A continuación observamos el algoritmo de control de un robot rastreador utilizando N = 2 sensores.-
Robot de Seguidor de LRobot de Seguidor de Lííneas (2)neas (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 95
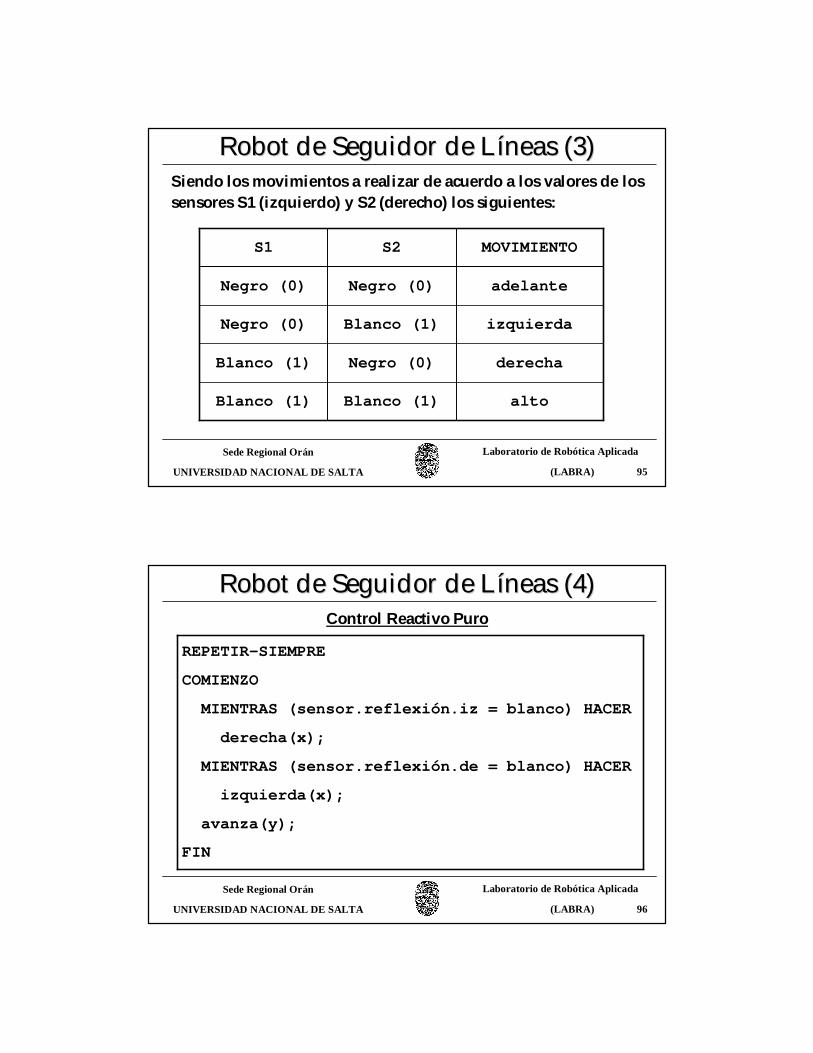
Siendo los movimientos a realizar de acuerdo a los valores de los sensores S1 (izquierdo) y S2 (derecho) los siguientes:
Robot de Seguidor de LRobot de Seguidor de Lííneas (3)neas (3)
altoBlanco (1)Blanco (1)
derechaNegro (0)Blanco (1)
izquierdaBlanco (1)Negro (0)
adelanteNegro (0)Negro (0)
MOVIMIENTOS2S1
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 96
Control Reactivo Puro
Robot de Seguidor de LRobot de Seguidor de Lííneas (4)neas (4)
REPETIR-SIEMPRE
COMIENZO
MIENTRAS (sensor.reflexión.iz = blanco) HACER
derecha(x);
MIENTRAS (sensor.reflexión.de = blanco) HACER
izquierda(x);
avanza(y);
FIN
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 97
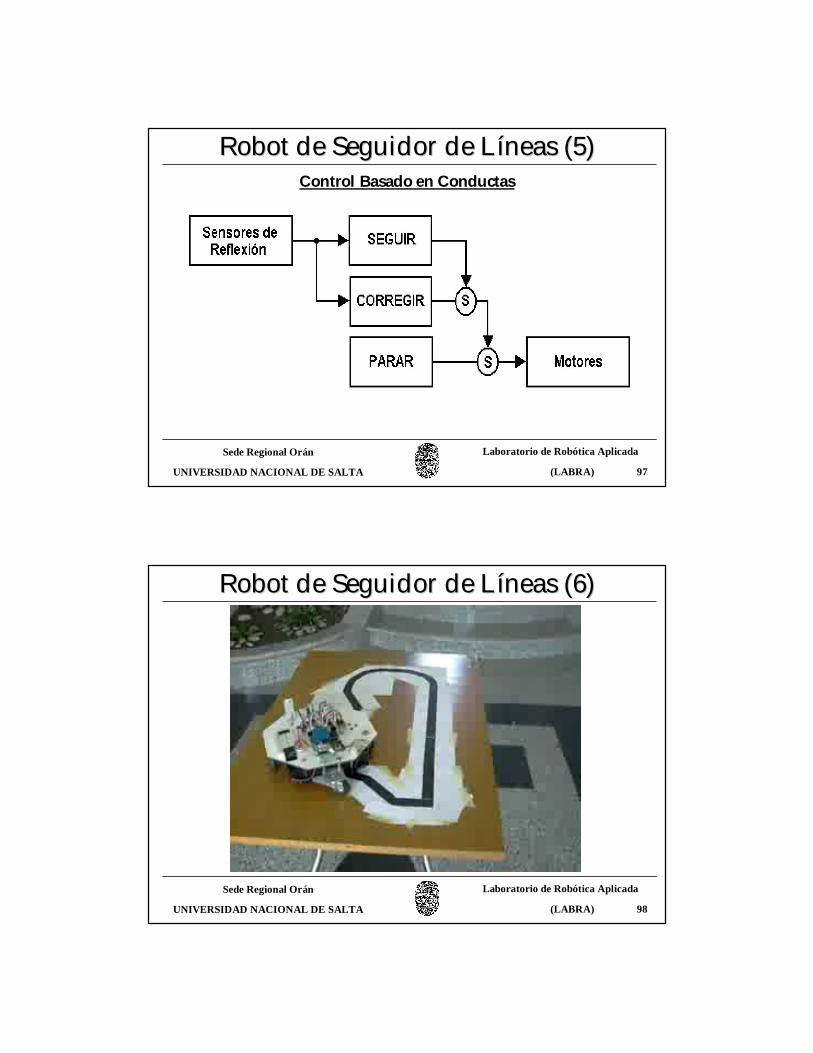
Control Basado en Conductas
Robot de Seguidor de LRobot de Seguidor de Lííneas (5)neas (5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 98
Robot de Seguidor de LRobot de Seguidor de Lííneas (6)neas (6)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 99
Robot de Seguidor de LRobot de Seguidor de Lííneas (7)neas (7)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 100
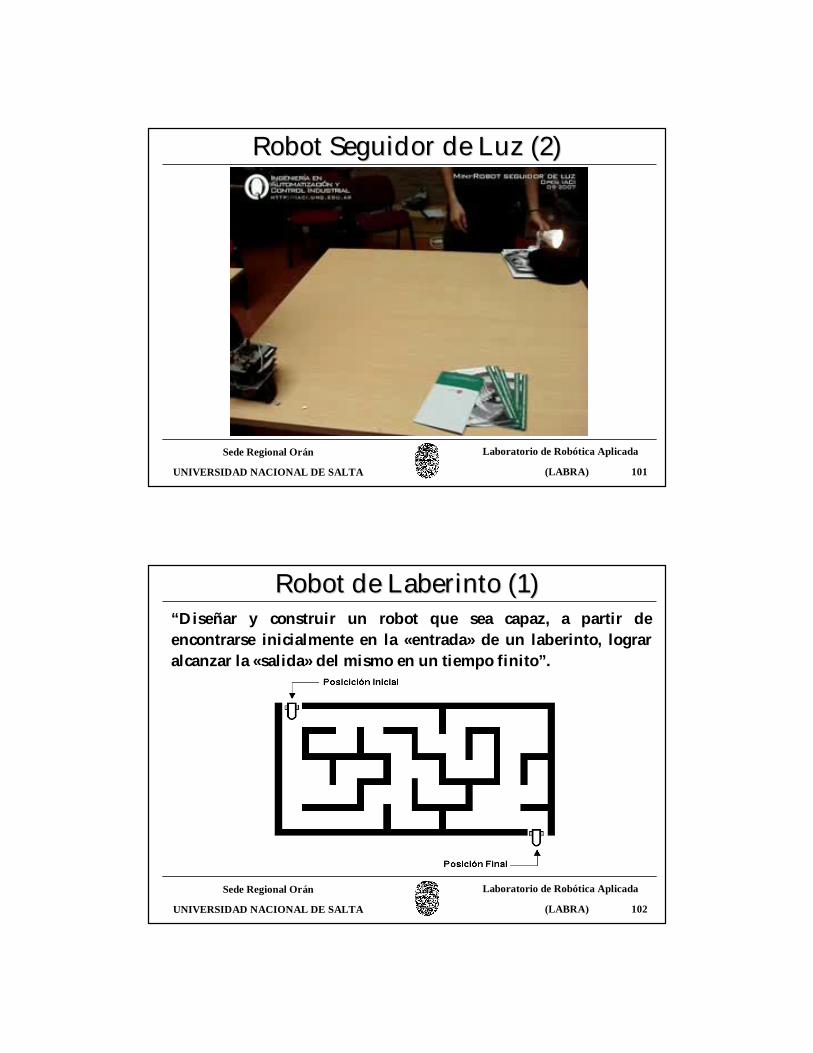
“Diseñar y construir un robot que sea capaz de moverse en dirección a una fuente de luz, hasta que se encuentre en un lugar iluminado, es decir, que tenga un determinado umbral de luz”.
Robot Seguidor de Luz (1)Robot Seguidor de Luz (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 101
Robot Seguidor de Luz (2)Robot Seguidor de Luz (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 102
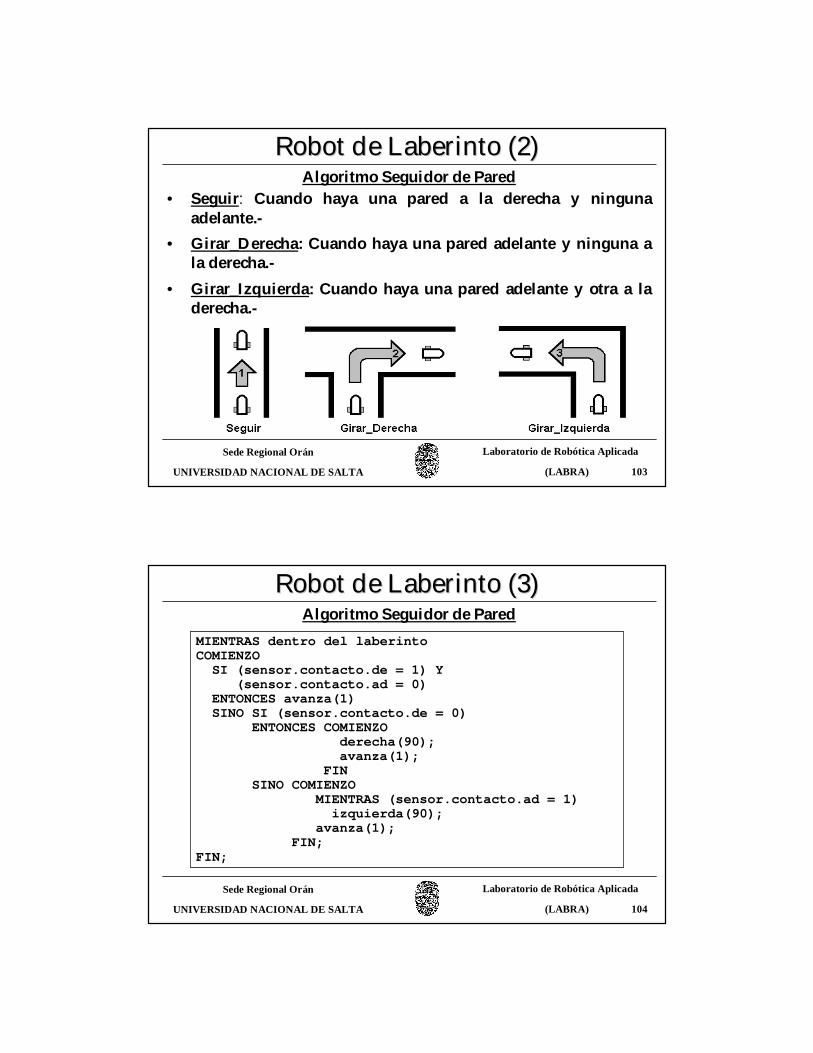
“Diseñar y construir un robot que sea capaz, a partir de encontrarse inicialmente en la «entrada» de un laberinto, lograr alcanzar la «salida» del mismo en un tiempo finito”.
Robot de Laberinto (1)Robot de Laberinto (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 103
Robot de Laberinto (2)Robot de Laberinto (2)Algoritmo Seguidor de Pared
• Seguir: Cuando haya una pared a la derecha y ninguna adelante.-
• Girar_Derecha: Cuando haya una pared adelante y ninguna a la derecha.-
• Girar_Izquierda: Cuando haya una pared adelante y otra a la derecha.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 104
Robot de Laberinto (3)Robot de Laberinto (3)Algoritmo Seguidor de Pared
MIENTRAS dentro del laberinto COMIENZOSI (sensor.contacto.de = 1) Y
(sensor.contacto.ad = 0) ENTONCES avanza(1)SINO SI (sensor.contacto.de = 0)
ENTONCES COMIENZOderecha(90);avanza(1);
FINSINO COMIENZO
MIENTRAS (sensor.contacto.ad = 1) izquierda(90);
avanza(1);FIN;
FIN;
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 105
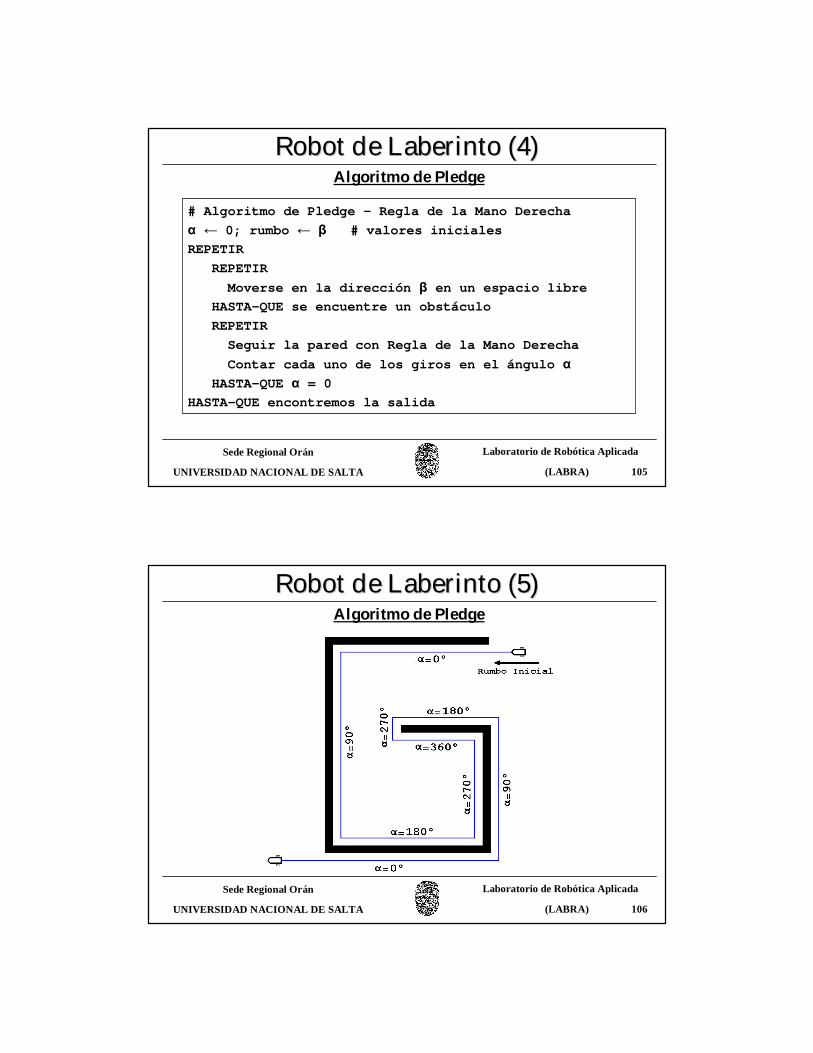
Robot de Laberinto (4)Robot de Laberinto (4)Algoritmo de Pledge
# Algoritmo de Pledge – Regla de la Mano Derechaα ← 0; rumbo ← β # valores inicialesREPETIR
REPETIRMoverse en la dirección β en un espacio libre
HASTA-QUE se encuentre un obstáculoREPETIRSeguir la pared con Regla de la Mano DerechaContar cada uno de los giros en el ángulo α
HASTA-QUE α = 0HASTA-QUE encontremos la salida
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 106
Robot de Laberinto (5)Robot de Laberinto (5)Algoritmo de Pledge
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 107
Robot de Laberinto (6)Robot de Laberinto (6)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 108
Robot de Laberinto (7)Robot de Laberinto (7)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 109
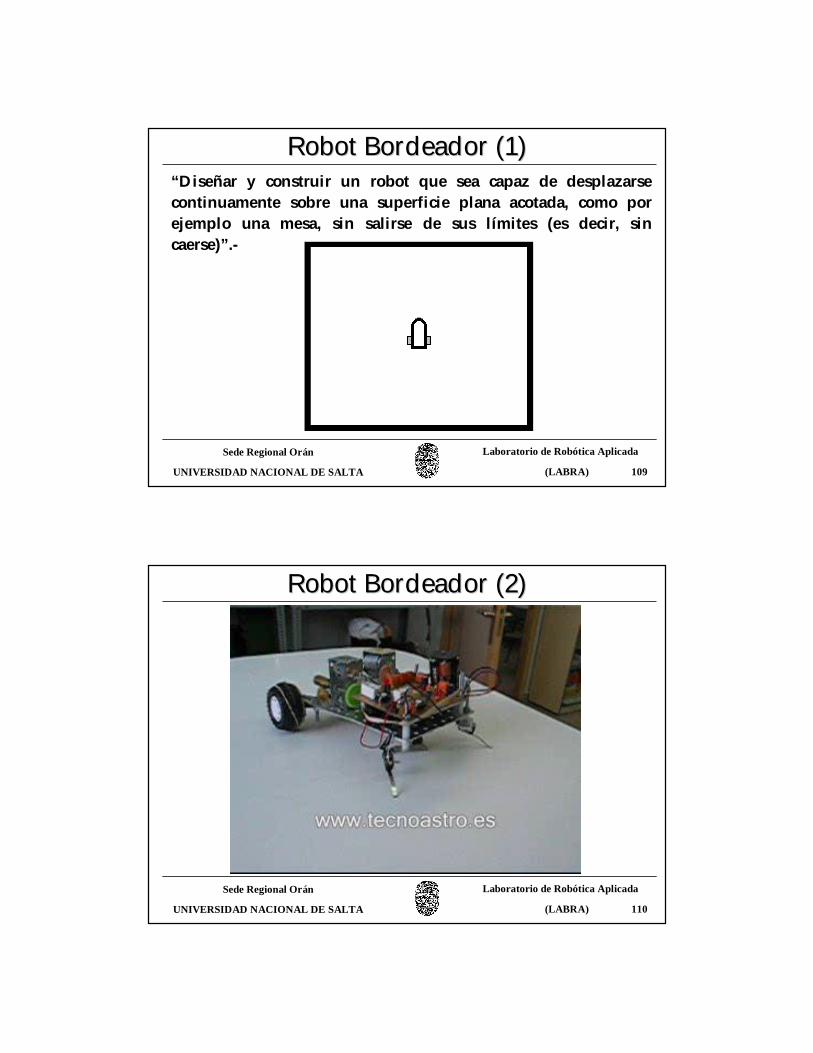
“Diseñar y construir un robot que sea capaz de desplazarse continuamente sobre una superficie plana acotada, como por ejemplo una mesa, sin salirse de sus límites (es decir, sin caerse)”.-
Robot Robot BordeadorBordeador (1)(1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 110
Robot Robot BordeadorBordeador (2)(2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 111
En Robótica es muy útil y relativamente sencillo usar simuladores. Para realizar un simulador es necesario seguir una serie de etapas en las que se debe definir el sistema que se quiere simular, el modelo que lo va a representar, los datos que se pretenden obtener y por último implementarlo en una computadora. Luego se deberá experimentar con el modelo e interpretar y extrapolar correctamente los datos que se obtengan. De todas formas existen gran cantidad de simuladores ya implementados que se utilizan a diferentes escalas y en distintos ámbitos. A continuación veremos algunos ejemplos.-
Simuladores de RobotsSimuladores de Robots
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 112
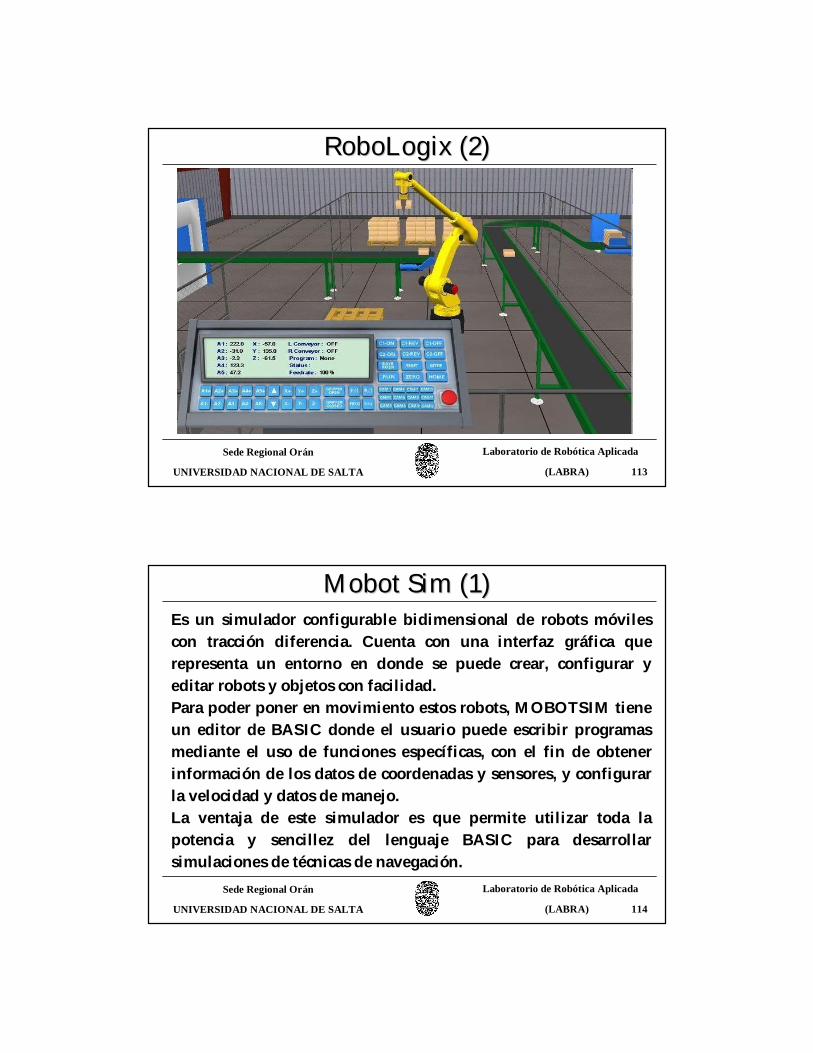
Es un simulador de robótica que utiliza un motor de física para emular el mundo real las aplicaciones de la robótica. Mediante el uso de RoboLogix, es posible enseñar, probar, ejecutar y depurar programas que se han escrito utilizando una de cinco ejes de robots industriales en una amplia gama de aplicaciones prácticas. Estas aplicaciones incluyen simulada pick-and-place, paletizado, soldadura y pintura. RoboLogix permite la ejecución de software del robot programas para probar y examinar visualmente la operación de los programas de control de robots y algoritmos , mientras planean aceleraciones instantáneas conjunta, velocidades y posiciones.-
RoboLogixRoboLogix (1)(1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 113
RoboLogixRoboLogix (2)(2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 114
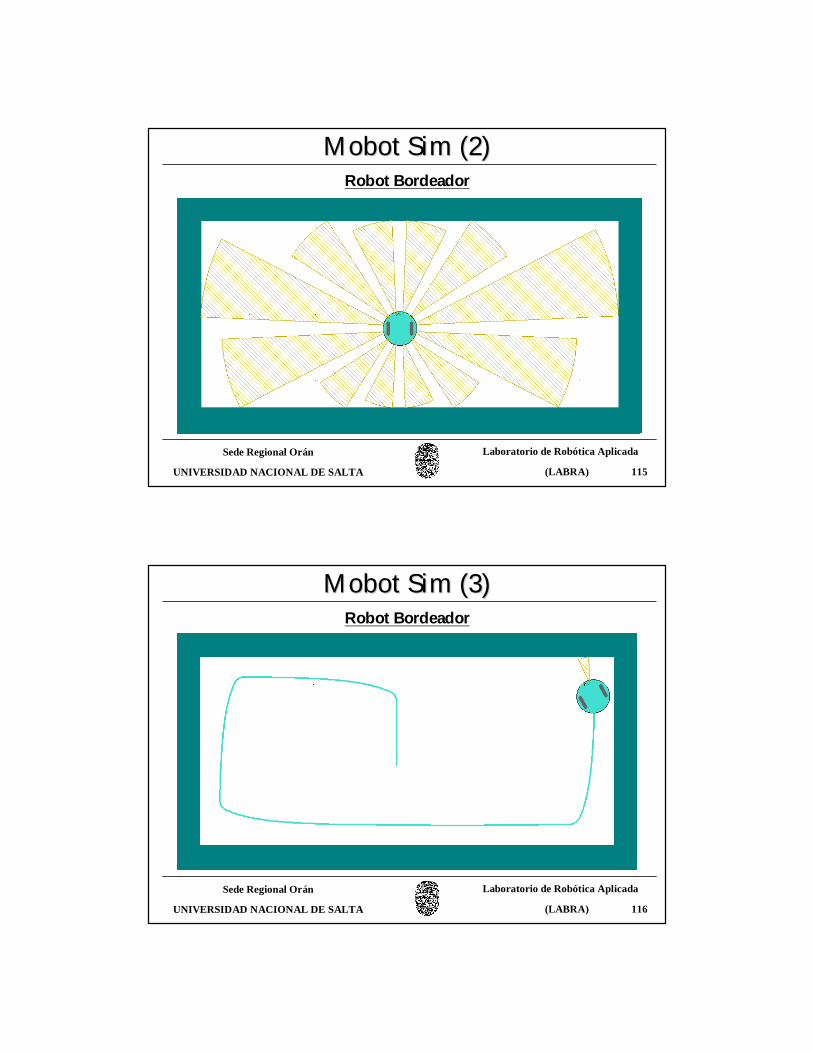
MobotMobot SimSim (1)(1)Es un simulador configurable bidimensional de robots móviles con tracción diferencia. Cuenta con una interfaz gráfica que representa un entorno en donde se puede crear, configurar y editar robots y objetos con facilidad. Para poder poner en movimiento estos robots, MOBOTSIM tiene un editor de BASIC donde el usuario puede escribir programas mediante el uso de funciones específicas, con el fin de obtener información de los datos de coordenadas y sensores, y configurar la velocidad y datos de manejo.La ventaja de este simulador es que permite utilizar toda la potencia y sencillez del lenguaje BASIC para desarrollar simulaciones de técnicas de navegación.
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 115
Robot Bordeador
MobotMobot SimSim (2)(2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 116
Robot Bordeador
MobotMobot SimSim (3)(3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 117
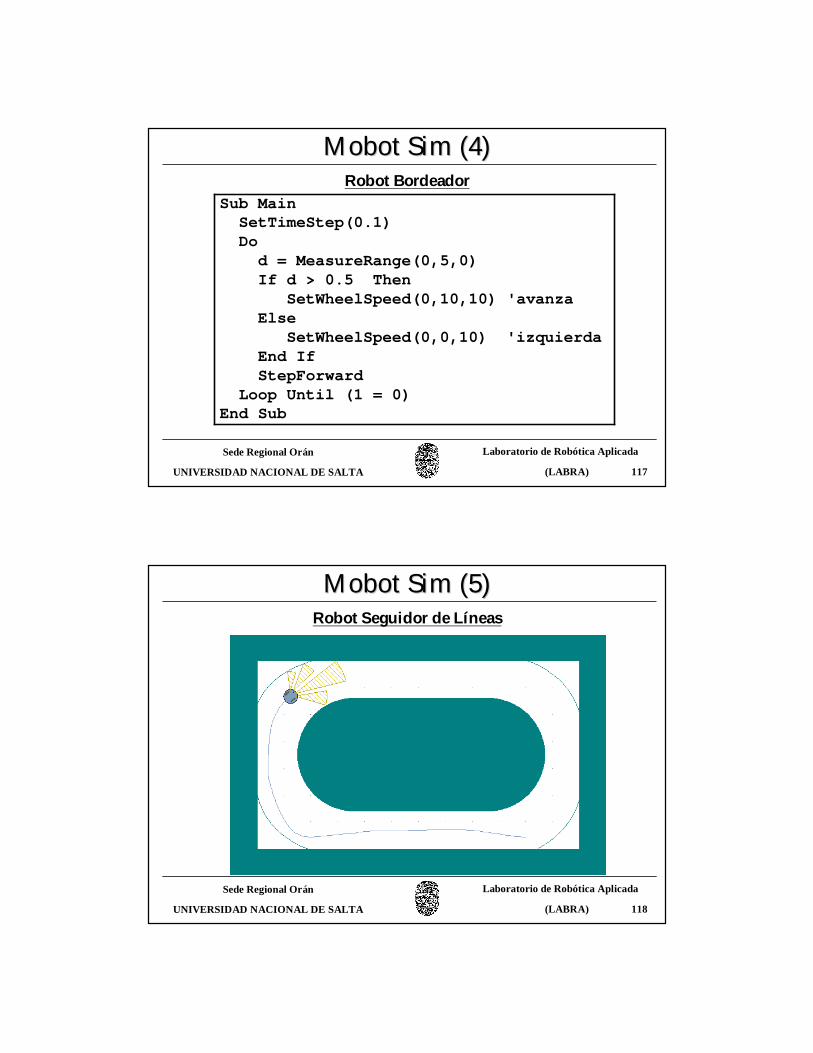
Robot Bordeador
MobotMobot SimSim (4)(4)
Sub MainSetTimeStep(0.1)Do
d = MeasureRange(0,5,0)If d > 0.5 Then
SetWheelSpeed(0,10,10) 'avanzaElse
SetWheelSpeed(0,0,10) 'izquierdaEnd IfStepForward
Loop Until (1 = 0)End Sub
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 118
Robot Seguidor de Líneas
MobotMobot SimSim (5)(5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 119
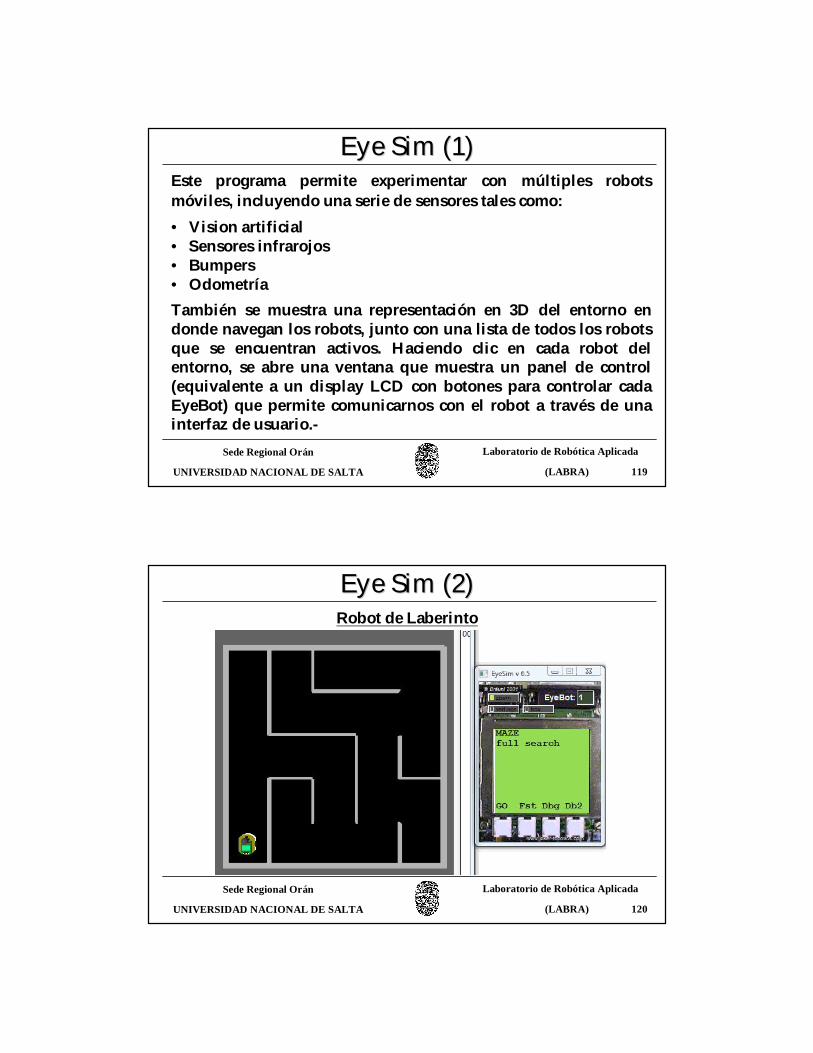
Este programa permite experimentar con múltiples robots móviles, incluyendo una serie de sensores tales como:• Vision artificial • Sensores infrarojos• Bumpers• OdometríaTambién se muestra una representación en 3D del entorno en donde navegan los robots, junto con una lista de todos los robots que se encuentran activos. Haciendo clic en cada robot del entorno, se abre una ventana que muestra un panel de control (equivalente a un display LCD con botones para controlar cada EyeBot) que permite comunicarnos con el robot a través de una interfaz de usuario.-
EyeEye SimSim (1)(1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 120
Robot de Laberinto
EyeEye SimSim (2)(2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 121
Simbad (1)Simbad (1)Este un programa open source escrito en JAVA que permitesimular robots en un ambiente 3D, con propósitos cientícos y educativos. It is mainly dedicated to researchers and programmers who want a simple basis for studying Situated Artificial Intelligence, Machine Learning, and more generally AI algorithms, in the context of Autonomous Robotics and Autonomous Agents. It is is kept voluntarily readable and simple for fast implementation in the field of Research and/or Education.Moreover, Simbad embeds two stand-alone additional packages : a Neural Network library (feed-forward NN, recurrent NN, etc.) and an Artificial Evolution Framework for Genetic Algorithm, Evolutionary Strategies and Genetic Programming. These packages are targeted towards Evolutionary Robotics.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 122
Simbad (2)Simbad (2)Este es un programa open source escrito en JAVA que permitesimular robots en un ambiente 3D, con propósitos científicos y educativos. Está enfocado principalmente a investigadores en lasáreas de la Inteligencia Artificial y el Aprendizaje Automático, en el contexto de la Robótica Autónoma. Además, Simbad posee dos módulos adicionales: una librería paratrabajar con distintos tipos de Redes Neuronales, y otro paquetepara programar Algoritmos Genéticos, lo que permite abordartemas de la Robótica Evolutiva.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 123
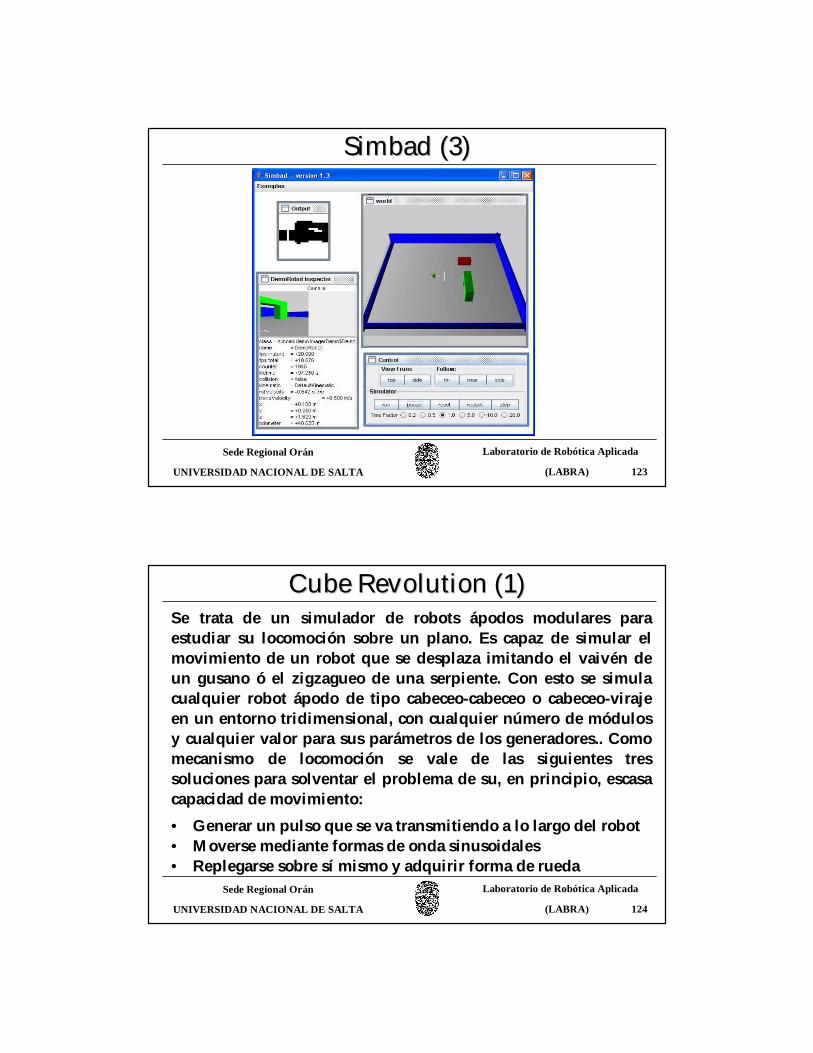
Simbad (3)Simbad (3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 124
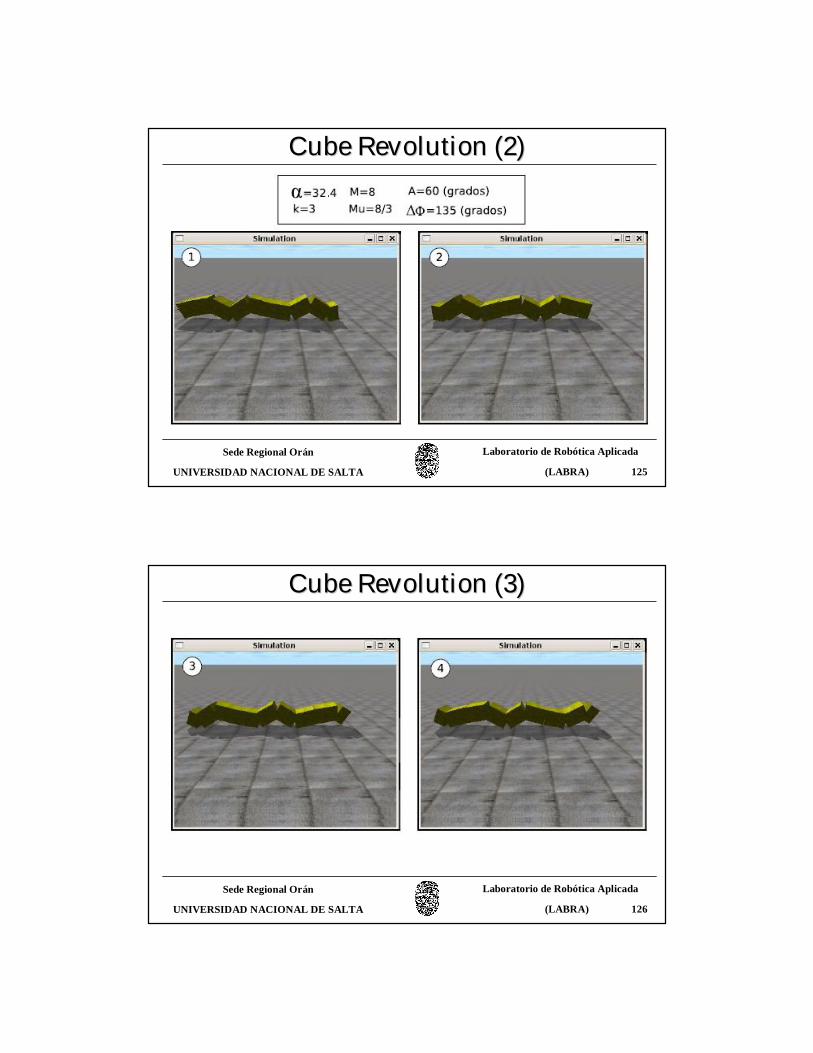
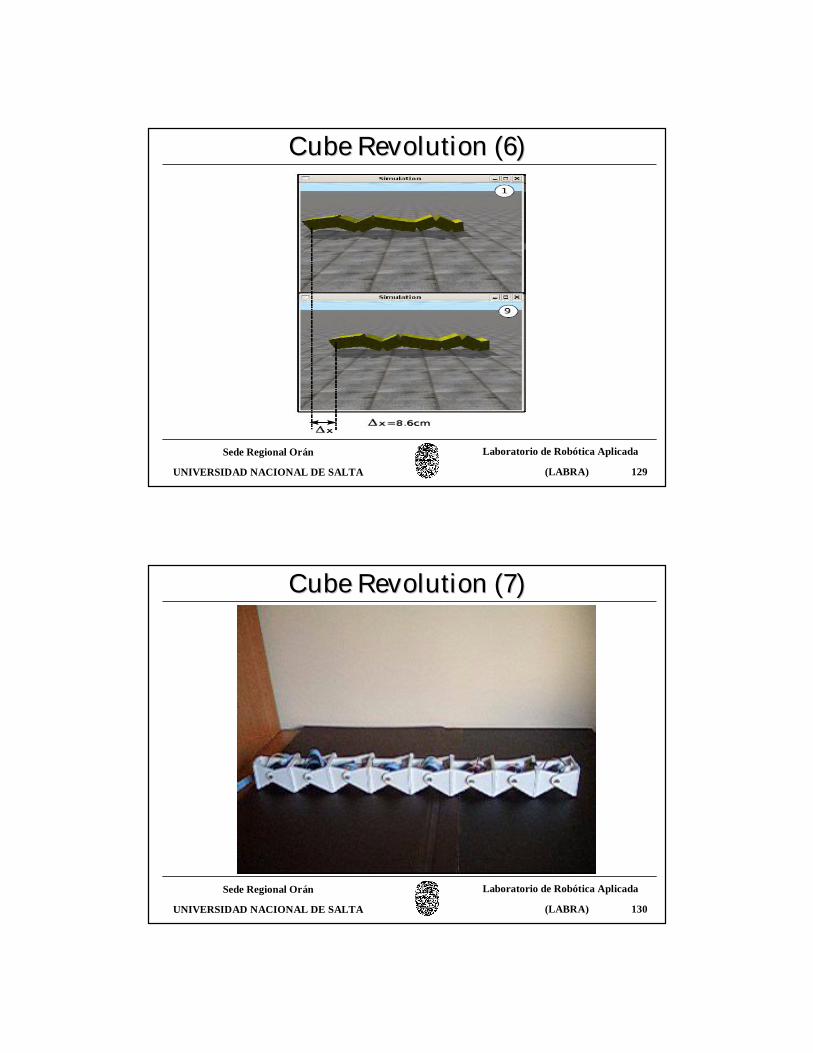
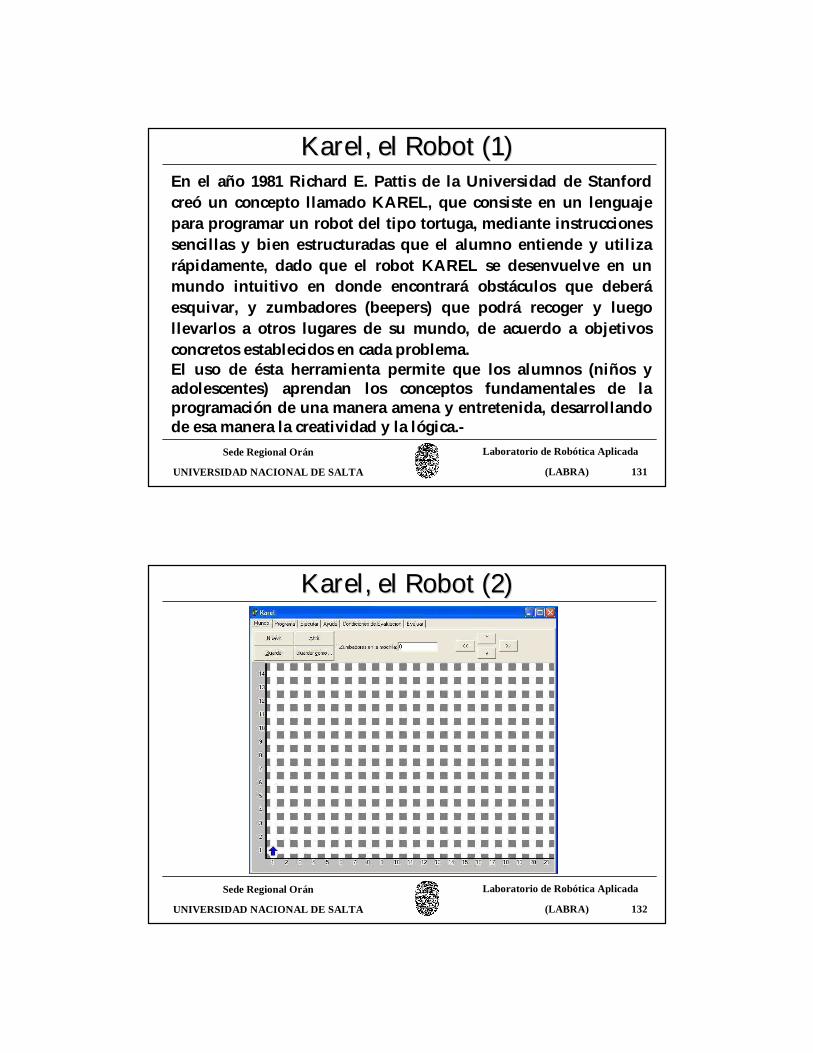
Se trata de un simulador de robots ápodos modulares para estudiar su locomoción sobre un plano. Es capaz de simular el movimiento de un robot que se desplaza imitando el vaivén de un gusano ó el zigzagueo de una serpiente. Con esto se simula cualquier robot ápodo de tipo cabeceo-cabeceo o cabeceo-viraje en un entorno tridimensional, con cualquier número de módulos y cualquier valor para sus parámetros de los generadores.. Como mecanismo de locomoción se vale de las siguientes tres soluciones para solventar el problema de su, en principio, escasa capacidad de movimiento:• Generar un pulso que se va transmitiendo a lo largo del robot• Moverse mediante formas de onda sinusoidales• Replegarse sobre sí mismo y adquirir forma de rueda
CubeCube RevolutionRevolution (1)(1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 125
CubeCube RevolutionRevolution (2)(2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 126
CubeCube RevolutionRevolution (3)(3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 127
CubeCube RevolutionRevolution (4)(4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 128
CubeCube RevolutionRevolution (5)(5)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 129
CubeCube RevolutionRevolution (6)(6)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 130
CubeCube RevolutionRevolution (7)(7)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 131
En el año 1981 Richard E. Pattis de la Universidad de Stanford creó un concepto llamado KAREL, que consiste en un lenguaje para programar un robot del tipo tortuga, mediante instruccionessencillas y bien estructuradas que el alumno entiende y utiliza rápidamente, dado que el robot KAREL se desenvuelve en un mundo intuitivo en donde encontrará obstáculos que deberáesquivar, y zumbadores (beepers) que podrá recoger y luego llevarlos a otros lugares de su mundo, de acuerdo a objetivos concretos establecidos en cada problema.El uso de ésta herramienta permite que los alumnos (niños y adolescentes) aprendan los conceptos fundamentales de la programación de una manera amena y entretenida, desarrollando de esa manera la creatividad y la lógica.-
Karel, el Robot (1)Karel, el Robot (1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 132
Karel, el Robot (2)Karel, el Robot (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 133
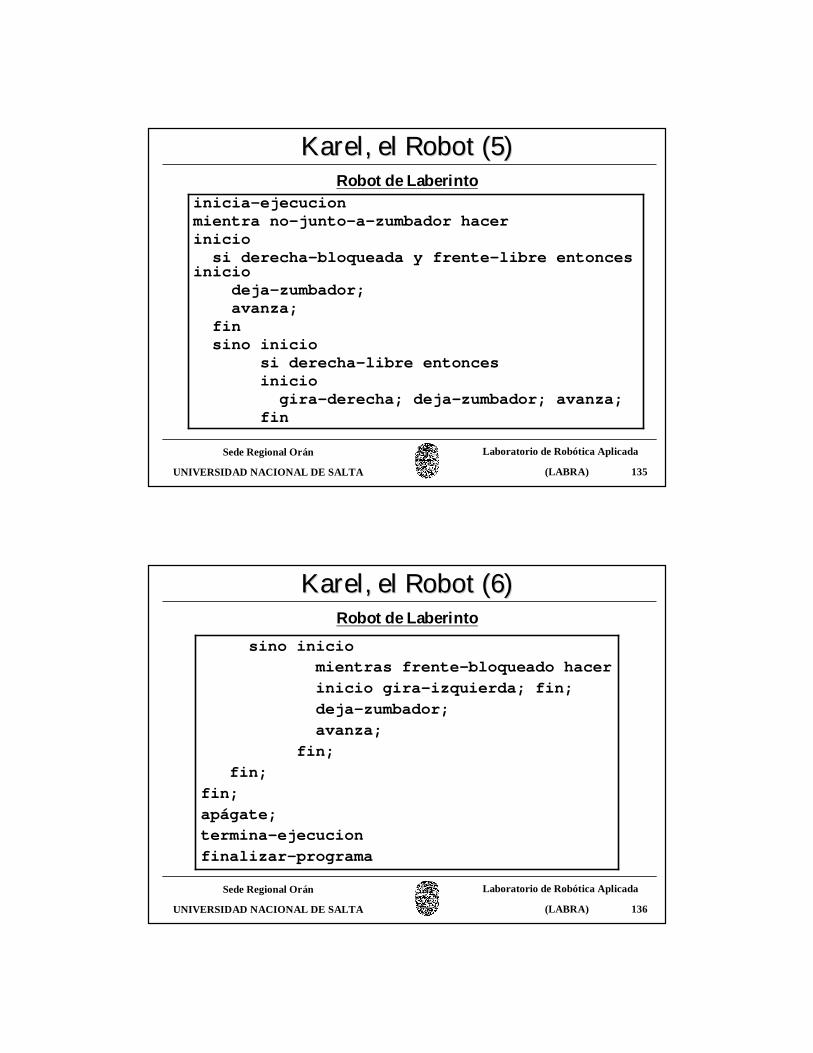
Karel, el Robot (3)Karel, el Robot (3)Robot de Laberinto
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 134
Karel, el Robot (4)Karel, el Robot (4)Robot de Laberinto
iniciar-programa
define-nueva-instruccion gira-derecha como
inicio
gira-izquierda;
gira-izquierda;
gira-izquierda;
fin
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 135
Karel, el Robot (5)Karel, el Robot (5)Robot de Laberinto
inicia-ejecucionmientra no-junto-a-zumbador hacerinicio
si derecha-bloqueada y frente-libre entoncesinicio
deja-zumbador;avanza;
finsino inicio
si derecha-libre entoncesinicio
gira-derecha; deja-zumbador; avanza;fin
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 136
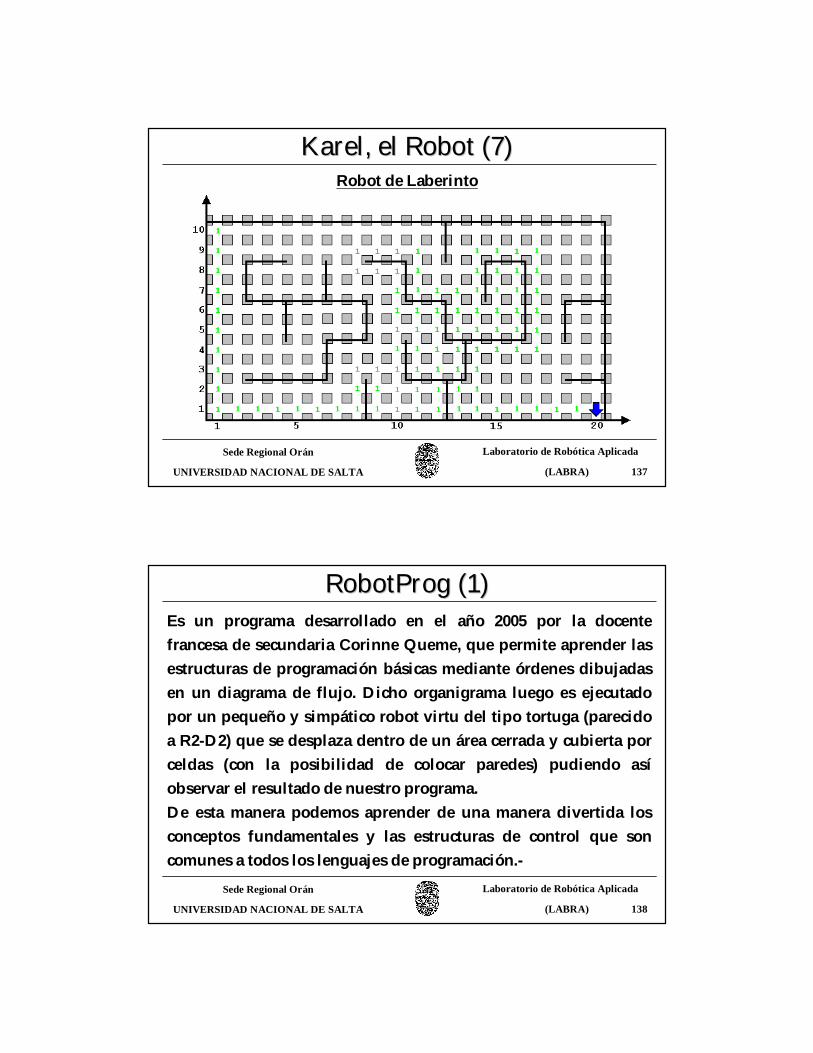
Karel, el Robot (6)Karel, el Robot (6)Robot de Laberinto
sino iniciomientras frente-bloqueado hacerinicio gira-izquierda; fin;deja-zumbador;avanza;
fin;fin;
fin;apágate;termina-ejecucionfinalizar-programa
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 137
Karel, el Robot (7)Karel, el Robot (7)Robot de Laberinto
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 138
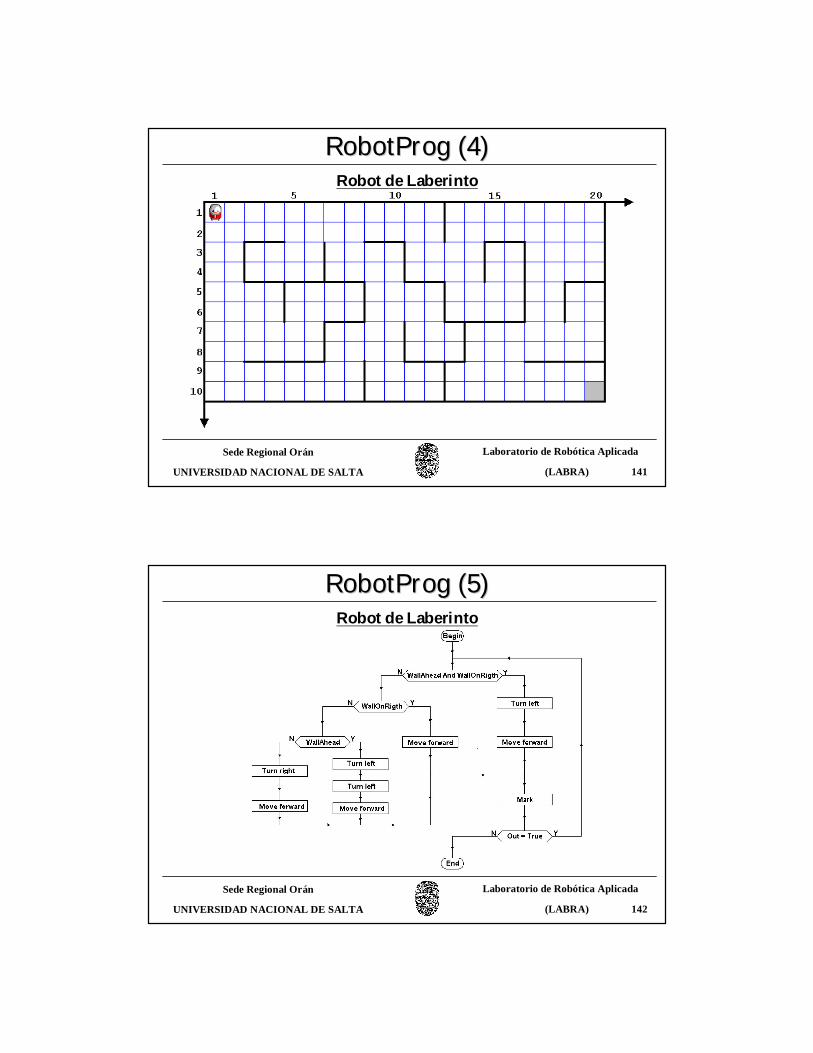
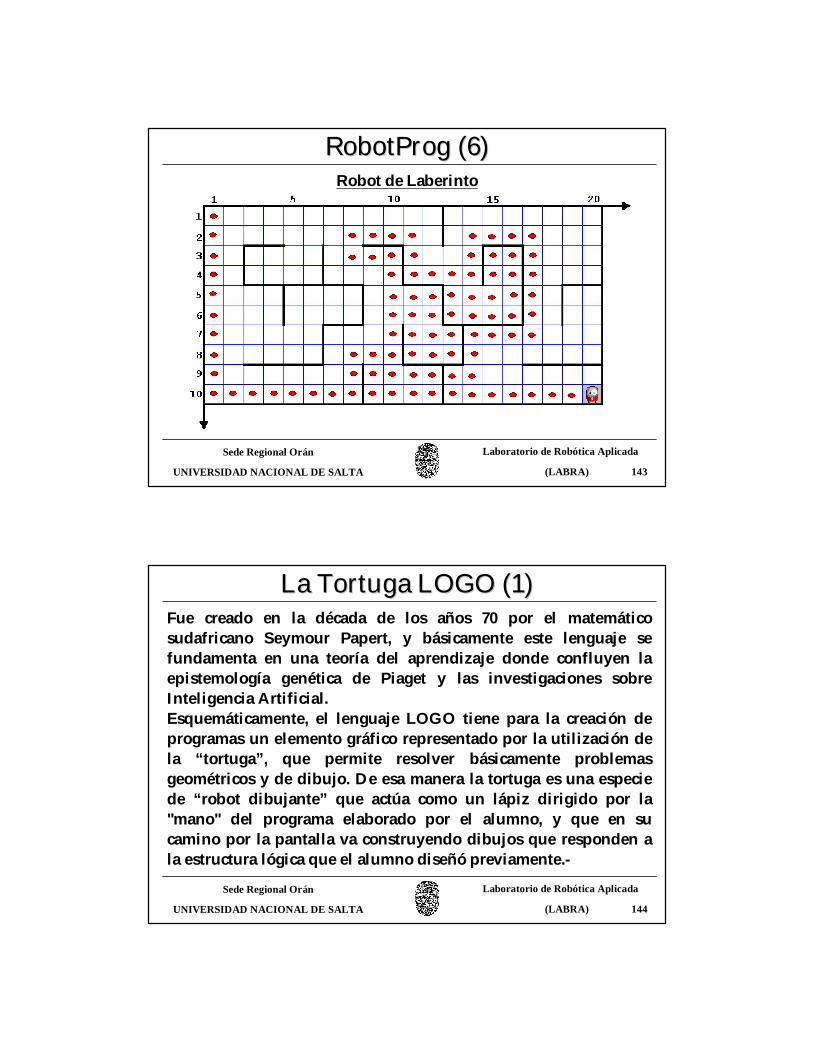
Es un programa desarrollado en el año 2005 por la docente francesa de secundaria Corinne Queme, que permite aprender las estructuras de programación básicas mediante órdenes dibujadas en un diagrama de flujo. Dicho organigrama luego es ejecutado por un pequeño y simpático robot virtu del tipo tortuga (parecido a R2-D2) que se desplaza dentro de un área cerrada y cubierta por celdas (con la posibilidad de colocar paredes) pudiendo asíobservar el resultado de nuestro programa. De esta manera podemos aprender de una manera divertida los conceptos fundamentales y las estructuras de control que son comunes a todos los lenguajes de programación.-
RobotProgRobotProg (1)(1)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 139
RobotProgRobotProg (2)(2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 140
RobotProgRobotProg (3)(3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 141
RobotProgRobotProg (4)(4)Robot de Laberinto
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 142
RobotProgRobotProg (5)(5)Robot de Laberinto
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 143
RobotProgRobotProg (6)(6)Robot de Laberinto
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 144
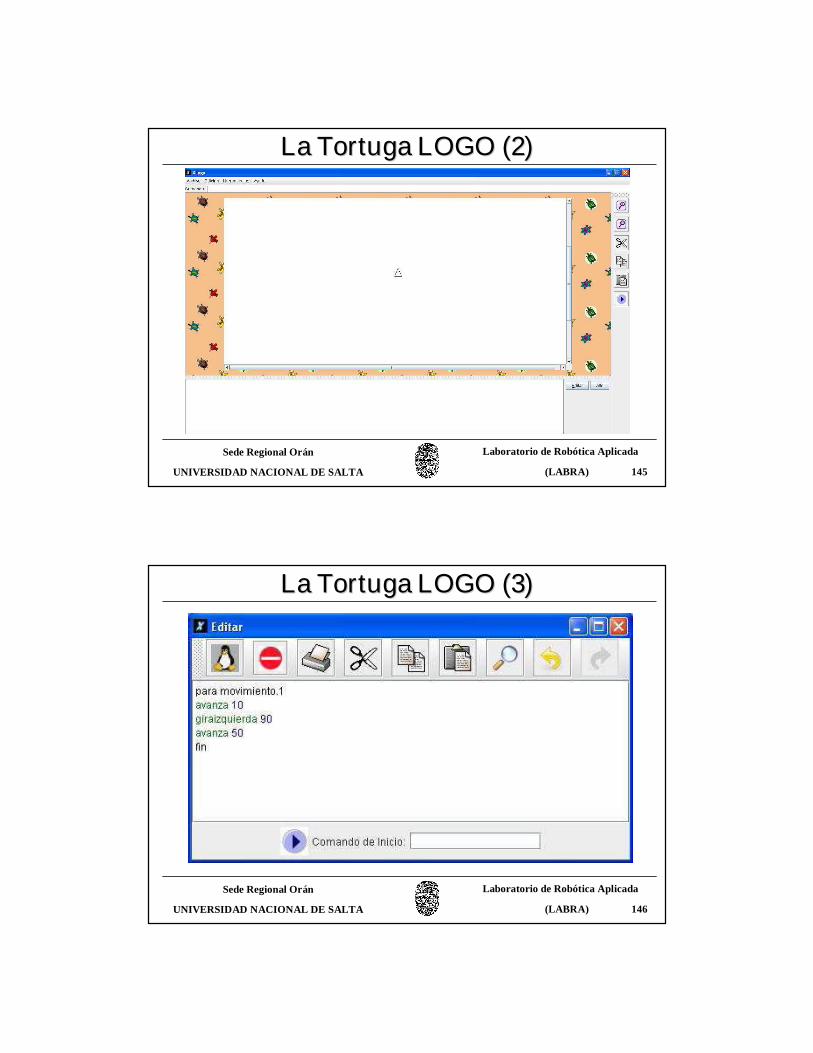
La Tortuga LOGO (1)La Tortuga LOGO (1)Fue creado en la década de los años 70 por el matemático sudafricano Seymour Papert, y básicamente este lenguaje se fundamenta en una teoría del aprendizaje donde confluyen la epistemología genética de Piaget y las investigaciones sobre Inteligencia Artificial.Esquemáticamente, el lenguaje LOGO tiene para la creación de programas un elemento gráfico representado por la utilización de la “tortuga”, que permite resolver básicamente problemas geométricos y de dibujo. De esa manera la tortuga es una especie de “robot dibujante” que actúa como un lápiz dirigido por la "mano" del programa elaborado por el alumno, y que en su camino por la pantalla va construyendo dibujos que responden a la estructura lógica que el alumno diseñó previamente.-
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 145
La Tortuga LOGO (2)La Tortuga LOGO (2)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 146
La Tortuga LOGO (3)La Tortuga LOGO (3)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 147
La Tortuga LOGO (4)La Tortuga LOGO (4)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 148
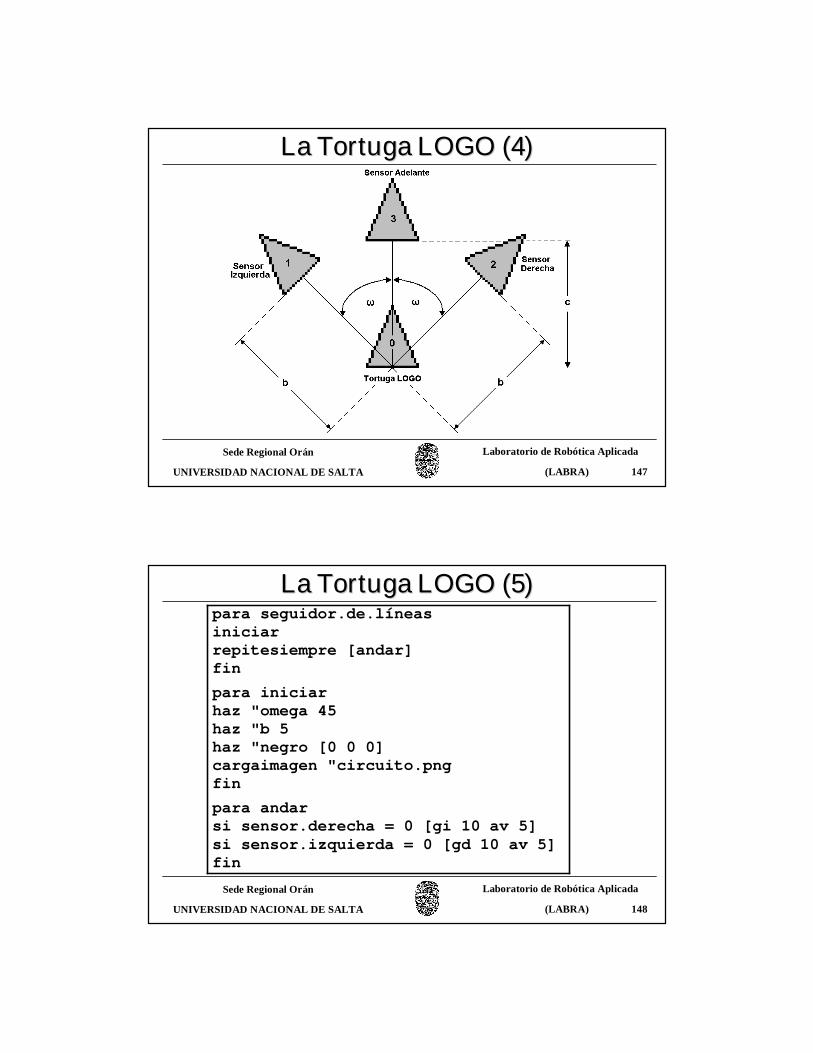
La Tortuga LOGO (5)La Tortuga LOGO (5)para seguidor.de.líneasiniciarrepitesiempre [andar]finpara iniciarhaz "omega 45haz "b 5haz "negro [0 0 0]cargaimagen "circuito.pngfinpara andarsi sensor.derecha = 0 [gi 10 av 5]si sensor.izquierda = 0 [gd 10 av 5]fin
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 149
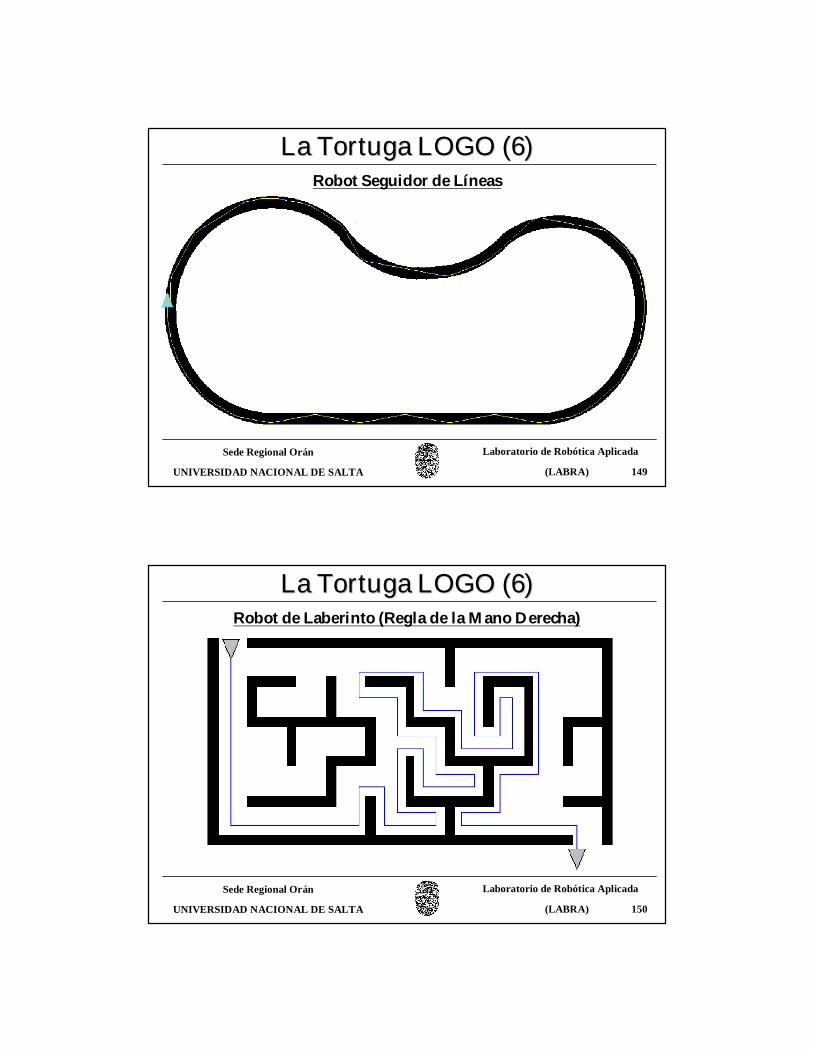
La Tortuga LOGO (6)La Tortuga LOGO (6)Robot Seguidor de Líneas
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 150
La Tortuga LOGO (6)La Tortuga LOGO (6)Robot de Laberinto (Regla de la Mano Derecha)
Sede Regional Orán
UNIVERSIDAD NACIONAL DE SALTA
Laboratorio de Robótica Aplicada
(LABRA) 151
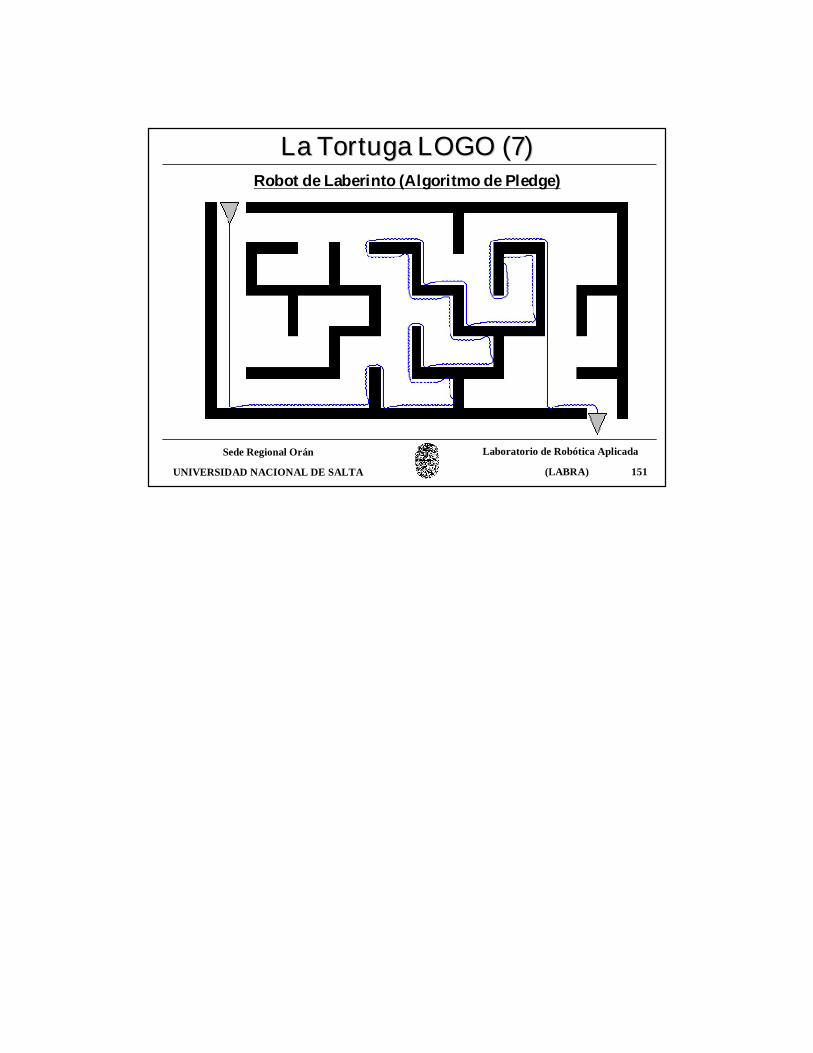
La Tortuga LOGO (7)La Tortuga LOGO (7)Robot de Laberinto (Algoritmo de Pledge)