herramientas matemáticas para la localización …. matrices de transformación homogénea ninguno...
TRANSCRIPT

Herramientas Matemáticas para la localización espacial
Prof. Cecilia García
localización espacial

Contenido I
1. Justificación
2. Representación de la posición2.1 Coord. Cartesianas2.2 Coord. Polares y Cilíndricas2.3 Coord. Esféricas
3. Representación de la orientación
Prof. Cecilia García
3. Representación de la orientación3.1 Matrices de Rotación en 2D
3.1.1 Particularidades de R 3.2 Matrices de Rotación en 3D
3.2.1 Composiciones de rotaciones
4. Angulos de Euler4.1 Angulos de Euler ZXZ (313)4.2 Angulos de Euler XYZ - Roll, Pitch, Yaw

Contenido II
5. Par de Rotación
6. Cuaternios
6.1 Operaciones Algebraica
6.2 Utilización de los cuaternios
7. Matrices de Transformación Homogénea
Prof. Cecilia García
7. Matrices de Transformación Homogénea
7.1 Traslación
7.2 Rotación
7.3 Traslación + Rotación
7.3.1 Rotación seguida de Traslación
7.3.2 Traslación seguida de Rotación
7.4 Variante en la notación
Contenido II
7.5 Gráficos de Transformación
Prof. Cecilia García

1. JustificaciónManipulación
de piezas
Localización del extremo
Prof. Cecilia García
del extremo y de la pieza
Descripción matemática de la
localización
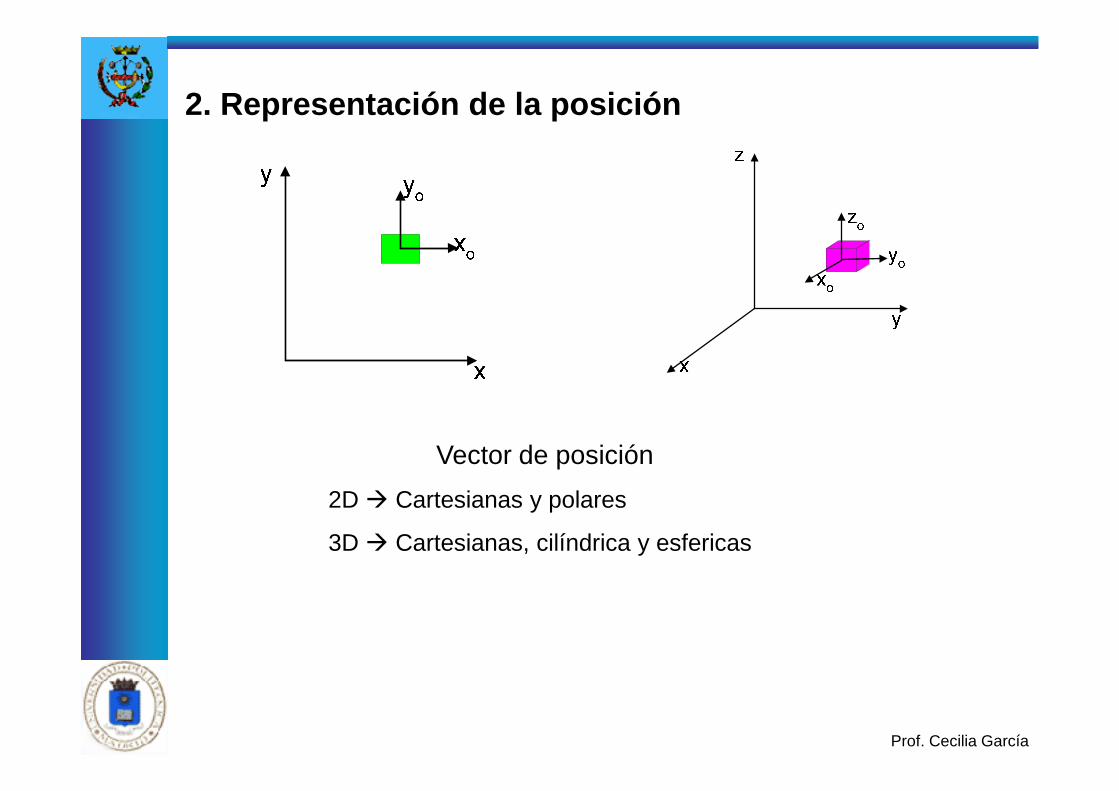
2. Representación de la posición
Prof. Cecilia García
Vector de posición
2D � Cartesianas y polares
3D � Cartesianas, cilíndrica y esfericas

Ejes perpendiculares con origen definido
2DOY
OX3D
OXOYOZ
2. Representación de la posición (cont.)2.1 Coord. Cartesianas
Prof. Cecilia García
vector p(x,y)
Coordenadas cartesianas
vector p(x,y,z)
Coordenadas cartesianas

2. Representación de la posición (cont.)2.2 Coord. Polares y Cilíndricas
2D � Coordenadas POLARES 3D � Coordenadas CILINDRICAS
Prof. Cecilia García
Coordenadas POLARES
: Distancia del el origen al puntorθ : Ángulo entre el vector p y el eje OX
Coordenadas CILÍNDRICAS
: Proyección del vector p sobre el eje OZ
z
vector ( )θφrp
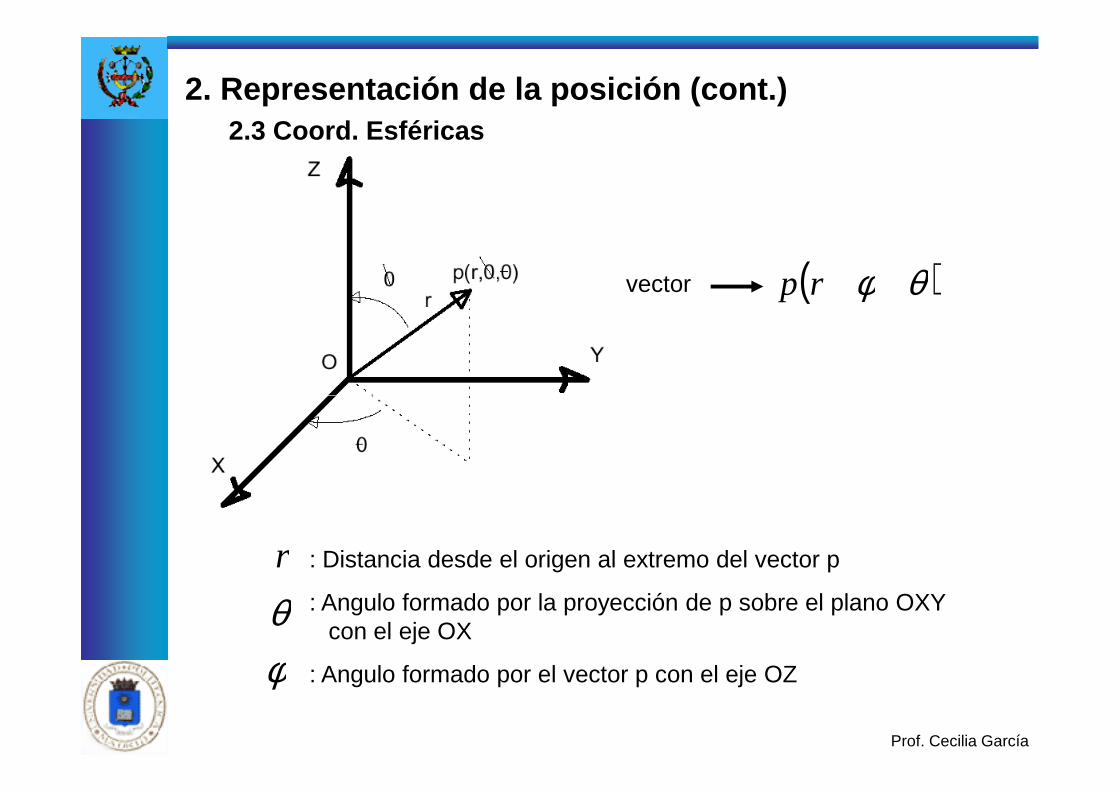
2. Representación de la posición (cont.)2.3 Coord. Esféricas
Prof. Cecilia García
: Distancia desde el origen al extremo del vector p
: Angulo formado por la proyección de p sobre el plano OXY con el eje OX
: Angulo formado por el vector p con el eje OZ
r
θφ
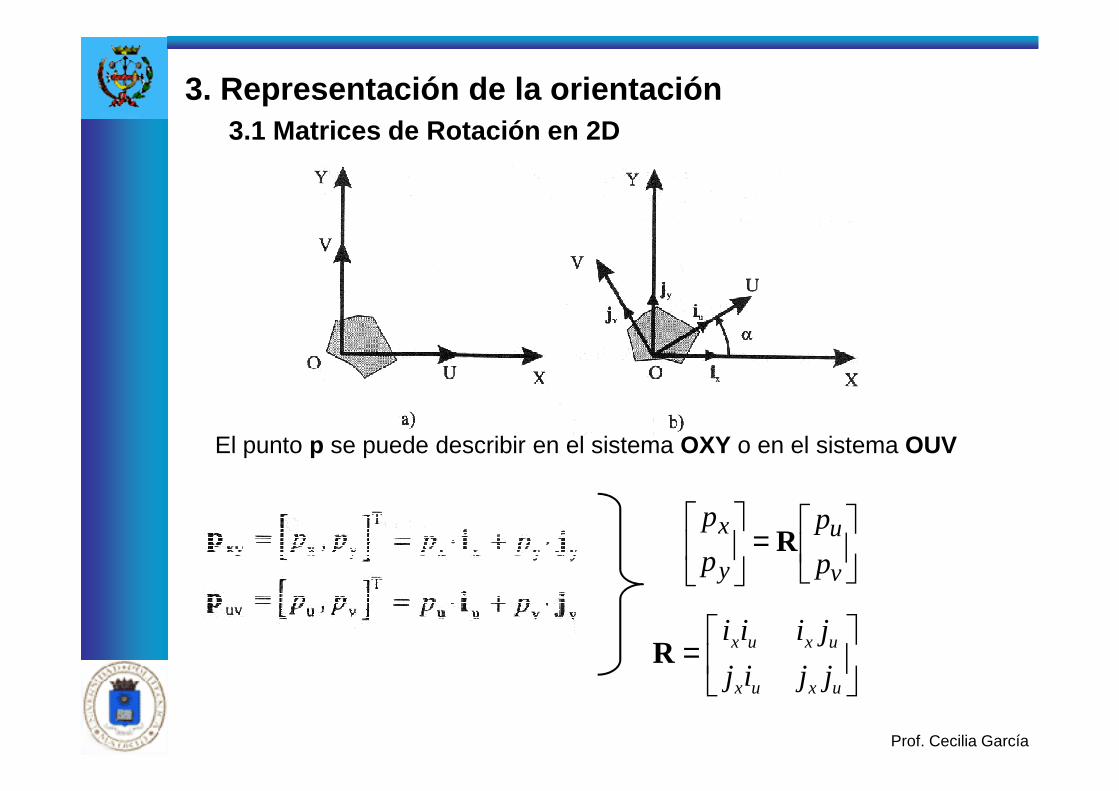
3. Representación de la orientación3.1 Matrices de Rotación en 2D
Prof. Cecilia García
El punto p se puede describir en el sistema OXY o en el sistema OUV
=
v
u
y
x
p
p
p
pR
=
uxux
uxux
jjij
jiiiR
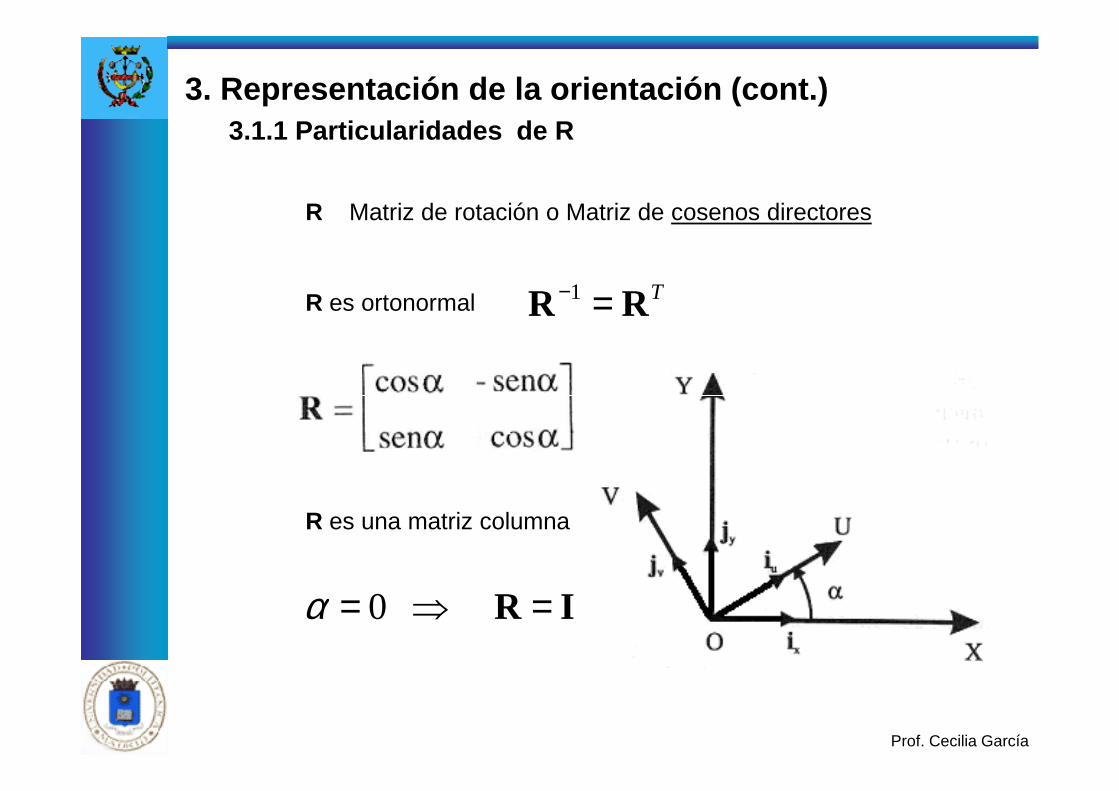
3.1.1 Particularidades de R
3. Representación de la orientación (cont.)
R Matriz de rotación o Matriz de cosenos directores
R es ortonormal TRR =−1
Prof. Cecilia García
R es una matriz columna
IR =⇒= 0α

3. Representación de la orientación (cont.)3.2 Matrices de Rotación en 3D
Prof. Cecilia García
El punto p se puede describir en el sistema OXYZ o en el sistema OUVW
Las propiedades de R vistas para 2D se conservan en 3D

3. Representación de la orientación (cont.)3.2 Matrices de Rotación en 3D (cont.)
Prof. Cecilia García
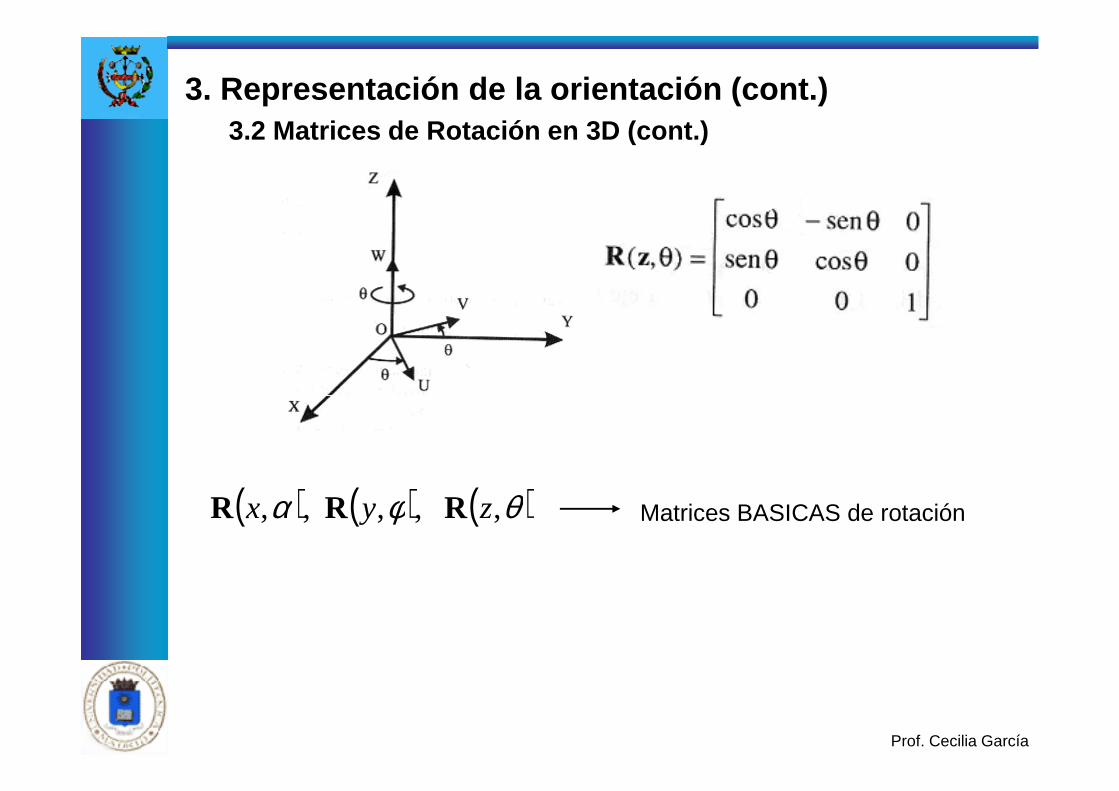
3. Representación de la orientación (cont.)3.2 Matrices de Rotación en 3D (cont.)
Prof. Cecilia García
( ) ( ) ( )θφα , ,, ,, zyx RRR Matrices BASICAS de rotación
3. Representación de la orientación (cont.)
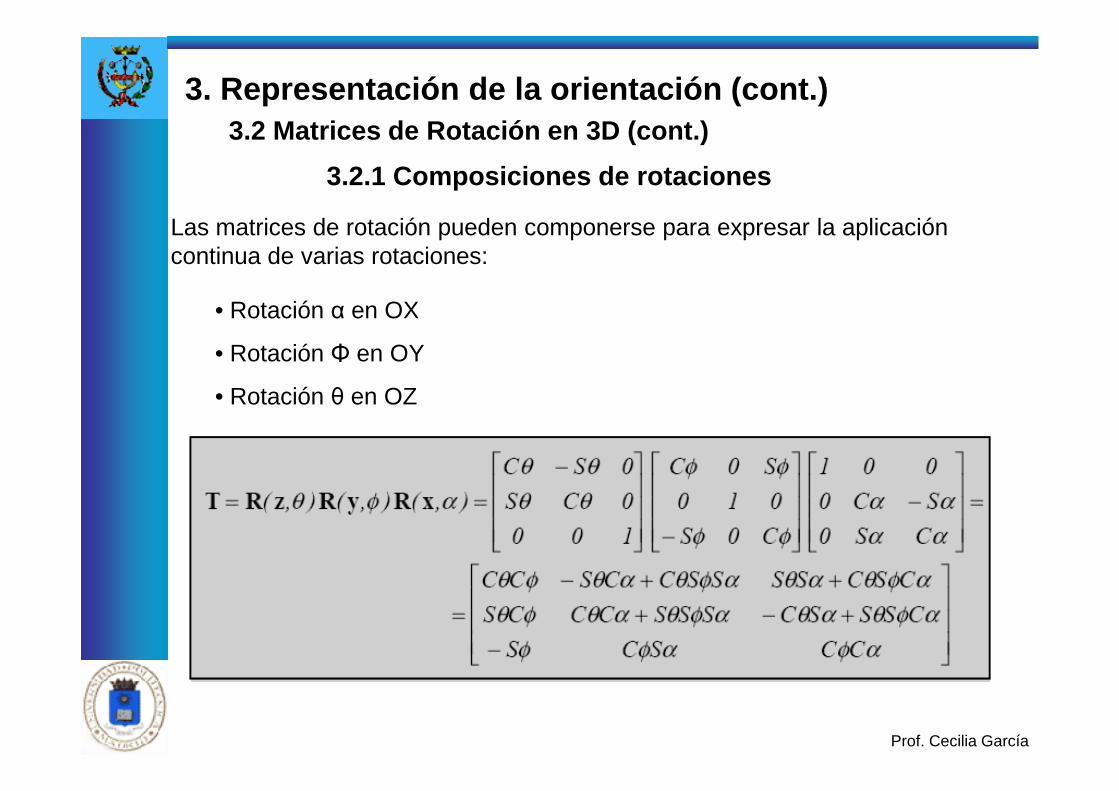
3.2.1 Composiciones de rotaciones
3.2 Matrices de Rotación en 3D (cont.)
Las matrices de rotación pueden componerse para expresar la aplicación continua de varias rotaciones:
• Rotación α en OX
• Rotación Φ en OY
• Rotación θ en OZ
Prof. Cecilia García
• Rotación θ en OZ

4. Angulos de Euler
Definición : Todo sistema OUVW móvil, puede definirse con respecto al sistema OXYZ inercial a través de tres ángulos Φ, θ, ψ, denominados ángulos de Euler .
Es una de las representaciones más habituales entre las que realizan los giros sobre ejes previamente girados. Se le suele asociar con los movimientos básicos de un giróscopo. Si se parte de los sistemas OXYZ
4.1 Angulos de Euler ZXZ (313)
Prof. Cecilia García
movimientos básicos de un giróscopo. Si se parte de los sistemas OXYZ y OUVW, inicialmente coincidentes, se puede colocar al sistema OUVW en cualquier orientación siguiendo los siguientes pasos.

4.1 Angulos de Euler ZXZ (313) (cont.)
1. Girar OUVW un ángulo Φ con respecto al eje OZ � OU’V’W’.
2. Girar OU’V’W’ un ángulo θ con respecto al eje OU’, convirtiéndose así en el
Prof. Cecilia García
convirtiéndose así en el OU’’V’’W’’.
3. Girar el sistema OU’’V’’W’’ un ángulo ψψψψ con respecto al eje OW’’ convirtiéndose finalmente en el OU’’’V’’’W’’’.

4.2 Angulos de Euler XYZ - Roll, Pitch, Yaw
Se trata de la representación utilizada generalmente en aeronáutica. Es también la más habitual de entre las que se aplican a los giros sobre los ejes del sistema fijo.
1. Girar el sistema OUVW un ángulo ψψψψcon respecto al eje OX. Es el denominado Yaw o guiñada.
2. Girar el sistema OUVW un ángulo θ
Prof. Cecilia García
2. Girar el sistema OUVW un ángulo θcon respecto al eje OY. Es el denominado Pitch o cabeceo.
3. Girar el sistema OUVW un ángulo Φcon respecto al eje OZ. Es el denominado Roll o alabeo.

5. Par de Rotación
Definición : La representación de la orientación de un sistema OUVW con respecto al sistema de referencia OXYZ también puede realizarse mediante la definición de un vector y un ángulo:
[ ] θ zyx kkk=k
Prof. Cecilia García
tal que el sistema OUVW corresponde al sistema OXYZ girado un ángulo θ sobre el eje k. El eje k ha de pasar por el origen O de ambos sistemas.
Al par (k, θ) se le denomina par de rotación y es único.
( ) ( ) ( )( )θθθθ cos1sincos, −•+×−= pkpkppkRot

6. Cuaternios
El conjunto R, C, Q forman un campo.
Sea C el conjunto de números complejos tal que:{ }
1
,/2 −=
ℜ∈+=i
babiaC
Definición: Un campo F consiste de un conjunto con dos operaciones (suma y producto) en el que se demuestran las propiedades de cerradura, conmutatividad, neutro, asociatividad, inverso y
Prof. Cecilia García
distributividad.
Definición: Los cuaternios se definen como el conjunto de números de la forma:
{ }1
,,,/222 −====
ℜ∈+++=IJKKJI
dcbadKcJbIaH

6. Cuaternios (cont.)
−=
=
−=
i
i
i
i
0
0
0
0
01
10KJI
Si
Se define el cuaternio:
−+−++
=∈diacib
cibdiahHh /
Este conjunto de cuaternios cumple todas las propiedades de un campo excepto al conmutatividad.
Prof. Cecilia García
excepto al conmutatividad.Por lo tanto recibe el nombre de anillo .
Propiedades:
h
hh
hhhh
dKcJbIah
dcbah
=
=
−−−=
+++=
−1
2222
2
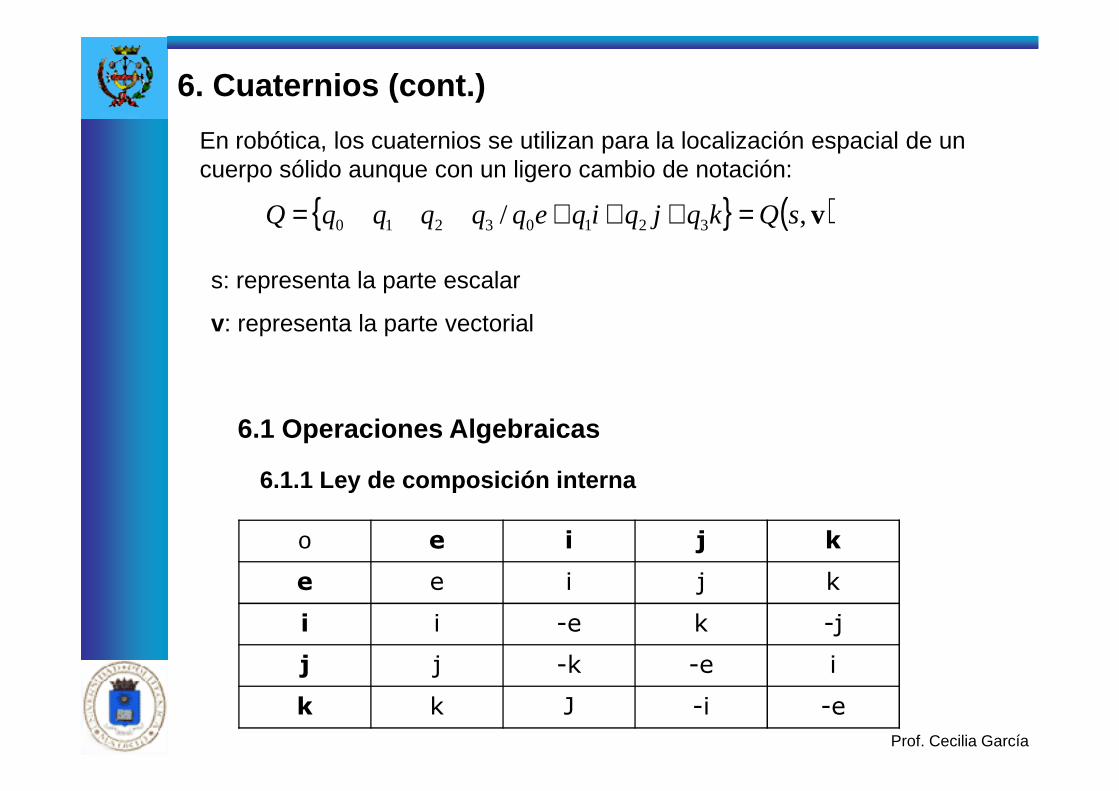
{ } ( )v,/ 32103210 sQkqjqiqeqqqqqQ =+++=
6. Cuaternios (cont.)
En robótica, los cuaternios se utilizan para la localización espacial de un cuerpo sólido aunque con un ligero cambio de notación:
s: representa la parte escalar
v: representa la parte vectorial
Prof. Cecilia García
6.1 Operaciones Algebraicas
o e i j k
e e i j k
i i -e k -j
j j -k -e i
k k J -i -e
6.1.1 Ley de composición interna
6.1 Operaciones Algebraicas (cont.)
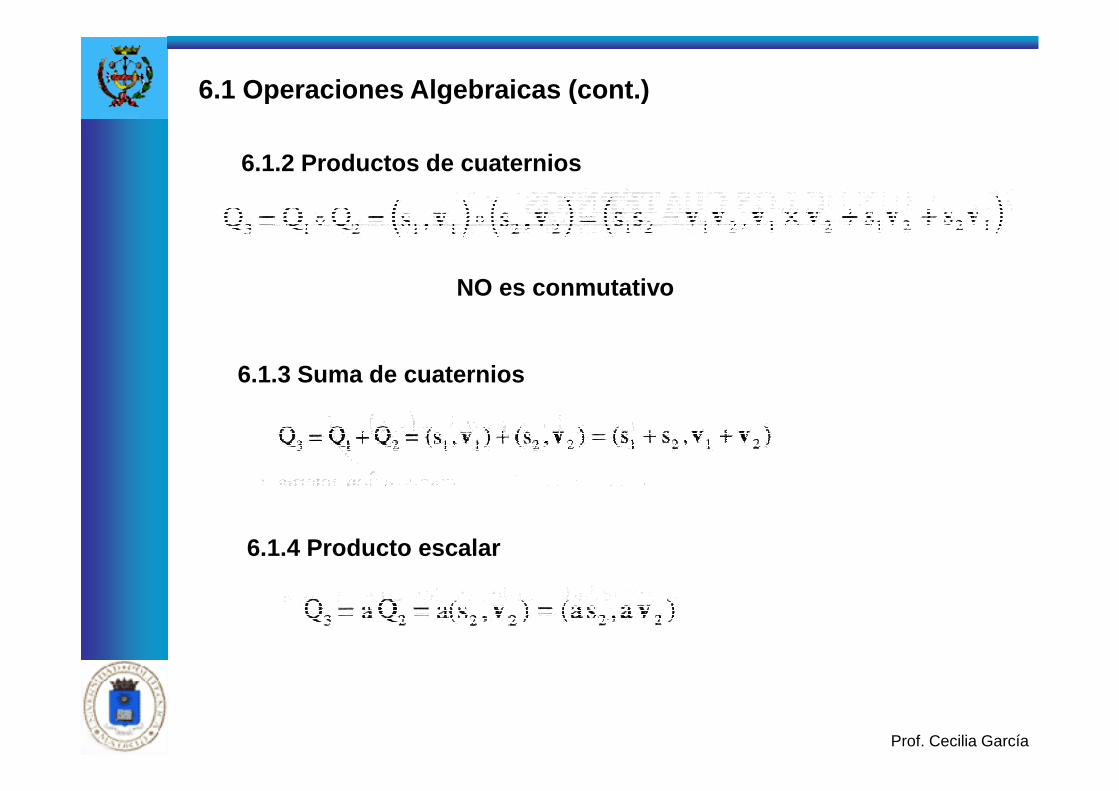
6.1.2 Productos de cuaternios
NO es conmutativo
6.1.3 Suma de cuaternios
Prof. Cecilia García
6.1.4 Producto escalar

6.1.5 Norma e Inverso
Norma: 23
22
21
20 q q q qQ +++=
Número real
Inverso:
Prof. Cecilia García
De esta asociación arbitraria y gracias a las propiedades de los cuaternios, se obtiene una importante herramienta analítica para el tratamiento de giros y cambios de orientación.
( ) ( )2sin,2cos, θθθ kk == RotQ
6.2 Utilización de los cuaternios
6.2.1 Giro θº sobre un eje k

6.2.2 Rotación del cuaternio Q a un vector r
( ) *,0 QQ �� r
6.2.3 Composición de rotaciones
213 QQQ �=
El resultado de rotar según el cuaternio Q , para posteriormente rotar
Prof. Cecilia García
El resultado de rotar según el cuaternio Q1, para posteriormente rotar según Q2, es el mismo que el de rotar según Q3. Es importante tener en cuenta que el producto de cuaternios no es conmutativo.
1221 QQQQ �� ≠

6.2.4 Rotación y traslación
( ) ( ) ( )prr ,0,0,0 * += QQ UVWXYZ ��
El resultado de aplicar una traslación p al vector r seguida de una rotación Q al sistema OXYZ, es un nuevo sistema OUVW, tal que las coordenadas de un vector r en el sistema OXYZ, conocidas en OUVW, serán:
Si se mantiene el sistema OXYZ fijo y se traslada el vector r
Prof. Cecilia García
Si se mantiene el sistema OXYZ fijo y se traslada el vector r según p y luego se le rota según Q se obtendrá el vector r’ de coordenadas:
( ) ( ) *' ,0,0 QQ �� prr +=
7. Matrices de Transformación Homogénea
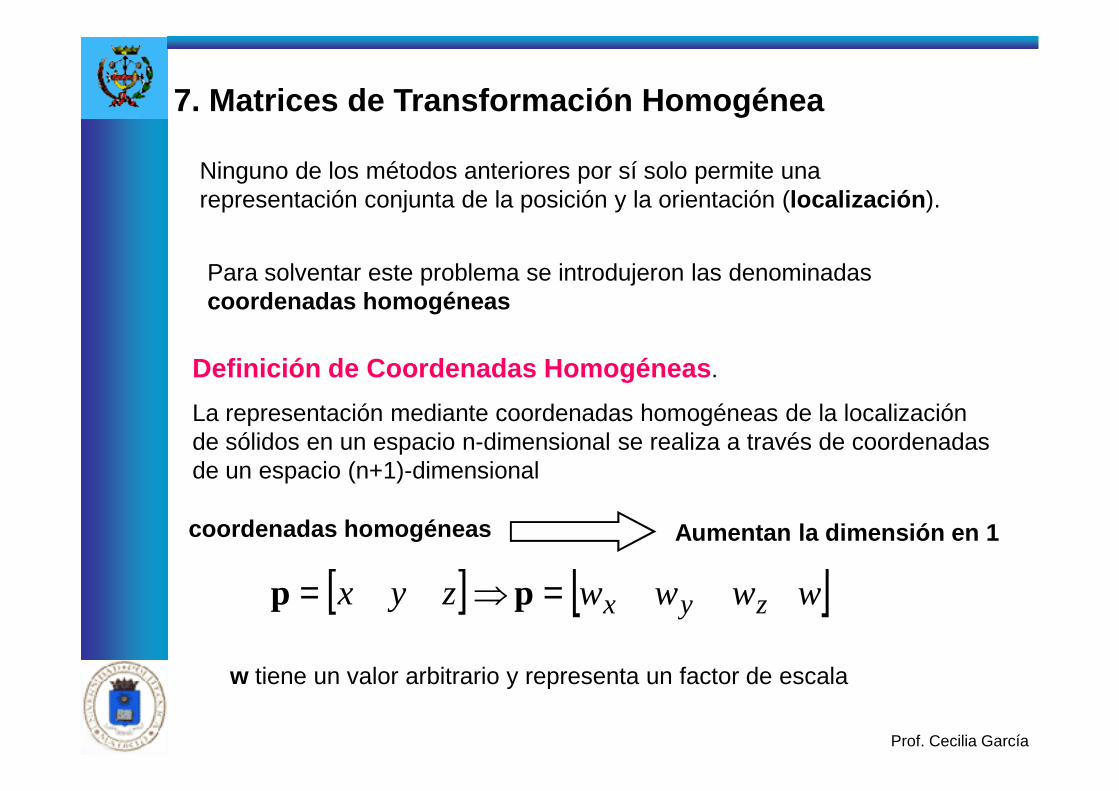
Ninguno de los métodos anteriores por sí solo permite una representación conjunta de la posición y la orientación (localización ).
Para solventar este problema se introdujeron las denominadas coordenadas homogéneas
Definición de Coordenadas Homogéneas .
Prof. Cecilia García
La representación mediante coordenadas homogéneas de la localización de sólidos en un espacio n-dimensional se realiza a través de coordenadas de un espacio (n+1)-dimensional
coordenadas homogéneas Aumentan la dimensión en 1
[ ] [ ] wwwwzyx zyx=⇒= pp
w tiene un valor arbitrario y representa un factor de escala
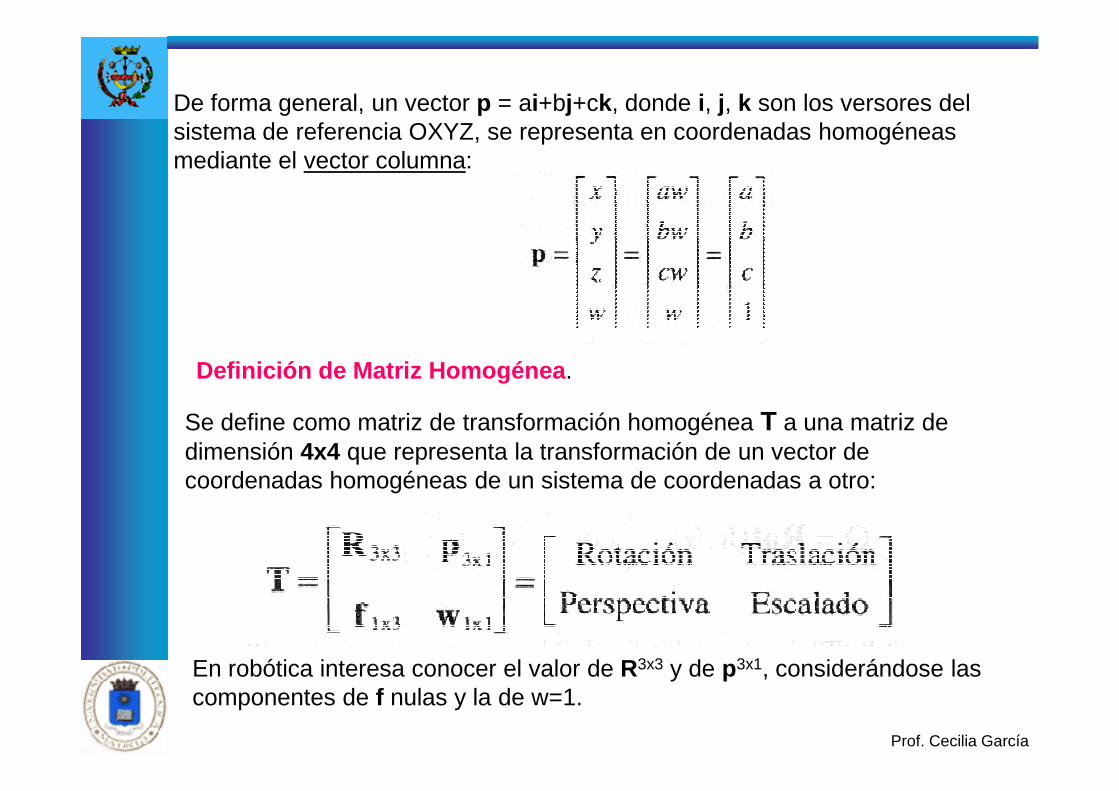
De forma general, un vector p = ai+bj+ck, donde i, j, k son los versores del sistema de referencia OXYZ, se representa en coordenadas homogéneas mediante el vector columna:
Definición de Matriz Homogénea .
Prof. Cecilia García
Se define como matriz de transformación homogénea T a una matriz de dimensión 4x4 que representa la transformación de un vector de coordenadas homogéneas de un sistema de coordenadas a otro:
En robótica interesa conocer el valor de R3x3 y de p3x1, considerándose las componentes de f nulas y la de w=1.

En robótica, la matriz T tiene la forma:
T representa la orientación y posición de un sistema O’UVW rotado y trasladado con respecto al sistema de referencia OXYZ.
Prof. Cecilia García
Dado un vector r= [r u, rv, rw] en el sistema OUVW, se puede conocer su localización ( r= [r x, ry, rz] ) en el sistema OXYZ a través de T:

1. Representar la posición y orientación de un sistema girado y trasladado O’UVW con respecto a un sistema fijo de referencia OXYZ, que es lo mismo que representar una rotación y traslación realizada sobre un sistema de referencia.
2. Transformar un vector expresado en coordenadas con respecto a un sistema O’UVW, a su expresión en coordenadas del sistema de referencia OXYZ.
Por lo tanto, una matriz de transformación homogénea se puede aplicar para:
Prof. Cecilia García
referencia OXYZ.
3. Rotar y trasladar un vector con respecto a un sistema de referencia fijo OXYZ
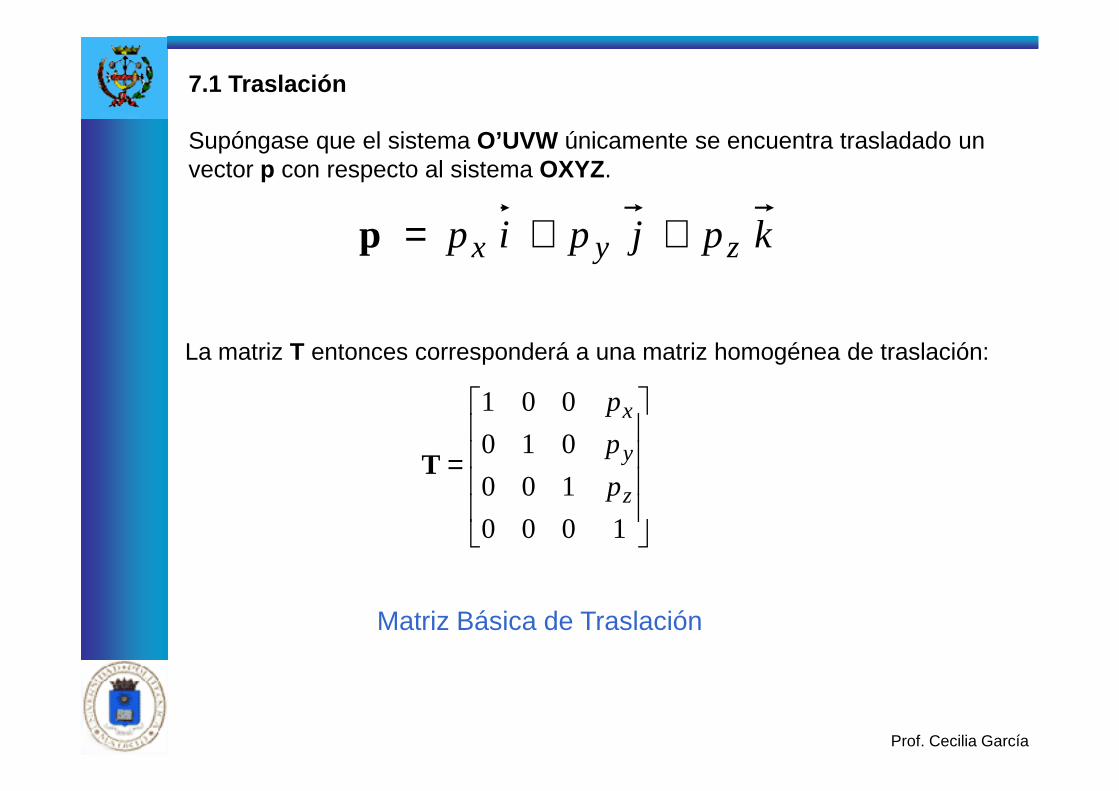
7.1 Traslación
Supóngase que el sistema O’UVW únicamente se encuentra trasladado un vector p con respecto al sistema OXYZ.
k p j p i p zyx ++=p
La matriz T entonces corresponderá a una matriz homogénea de traslación:
001 p
Prof. Cecilia García
=
1000
100
010
001
z
y
x
p
p
p
T
Matriz Básica de Traslación
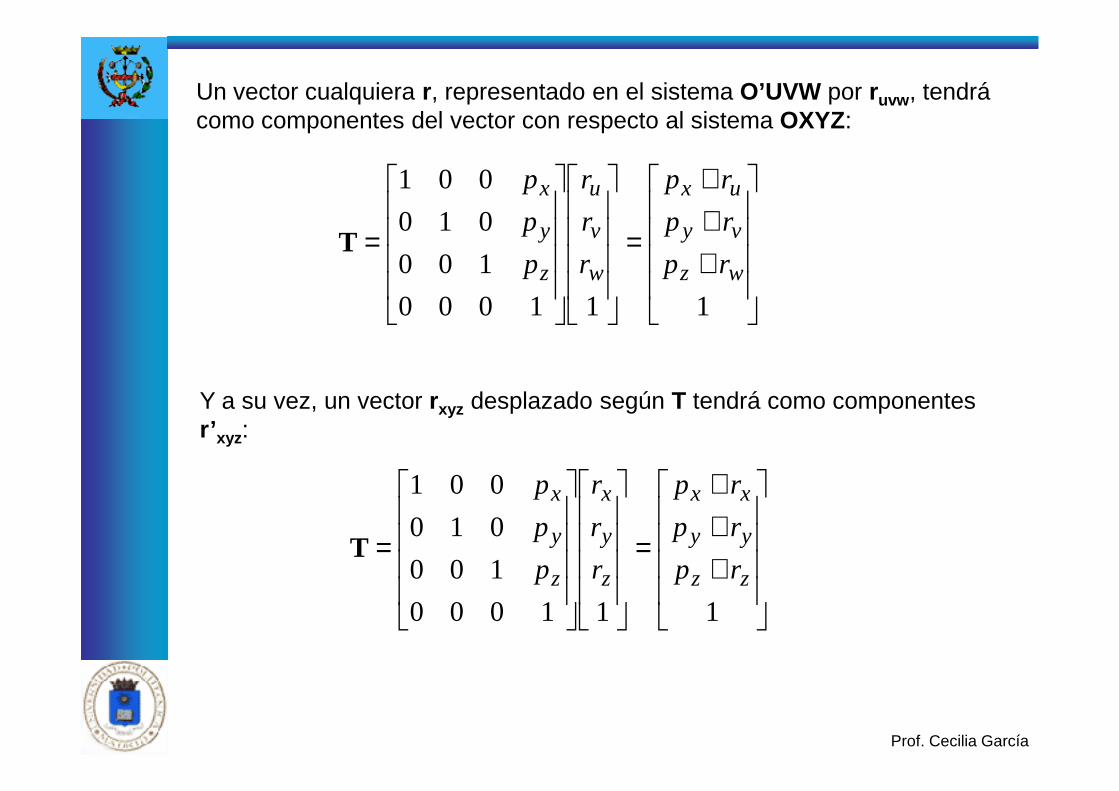
Un vector cualquiera r, representado en el sistema O’UVW por ruvw , tendrá como componentes del vector con respecto al sistema OXYZ:
+++
=
=
111000
100
010
001
wz
vy
ux
w
v
u
z
y
x
rp
rp
rp
r
r
r
p
p
p
T
Y a su vez, un vector r desplazado según T tendrá como componentes
Prof. Cecilia García
Y a su vez, un vector rxyz desplazado según T tendrá como componentes r’ xyz:
+++
=
=
111000
100
010
001
zz
yy
xx
z
y
x
z
y
x
rp
rp
rp
r
r
r
p
p
p
T

7.2 Rotación
Supóngase que el sistema O’UVW únicamente se encuentra rotado un angulo con respecto al sistema OXYZ.
Rotación de α respecto a OX
Prof. Cecilia García
Matriz Básica de Rotación
Rotación de Φ respecto a OY
Rotación de θ respecto a OZ

Dado un vector r= [r u, rv, rw] en el sistema OUVW, se puede conocer su localización ( r= [r x, ry, rz] ) en el sistema OXYZ a través de T:
Prof. Cecilia García
7.3 Traslación + Rotación
La principal ventaja de las matrices homogénea reside en su capacidad de representación conjunta de posición y orientación .
Para ello se utiliza la matriz de rotación R3x3 y el vector de traslación p3x1 en una matriz de transformación homogénea al mismo tiempo.
Es por tanto la aplicación conjunta de lo visto en los dos apartados anteriores.

La rotación y traslación son operaciones no conmutativas por lo que habrá que tener en cuenta el orden en que se realizan.
Prof. Cecilia García
Se parte de un sistema OUVW coincidente con OXYZ al que se va a aplicar una traslación según un vector px,y,z y una rotación de 180° alrededor del eje OZ.
Si primero se rota y después se traslada se obtiene un sistema final O’U’V’W ’. Si primero se traslada y después se rota se obtiene un sistema final O’’U’’V’’W’’
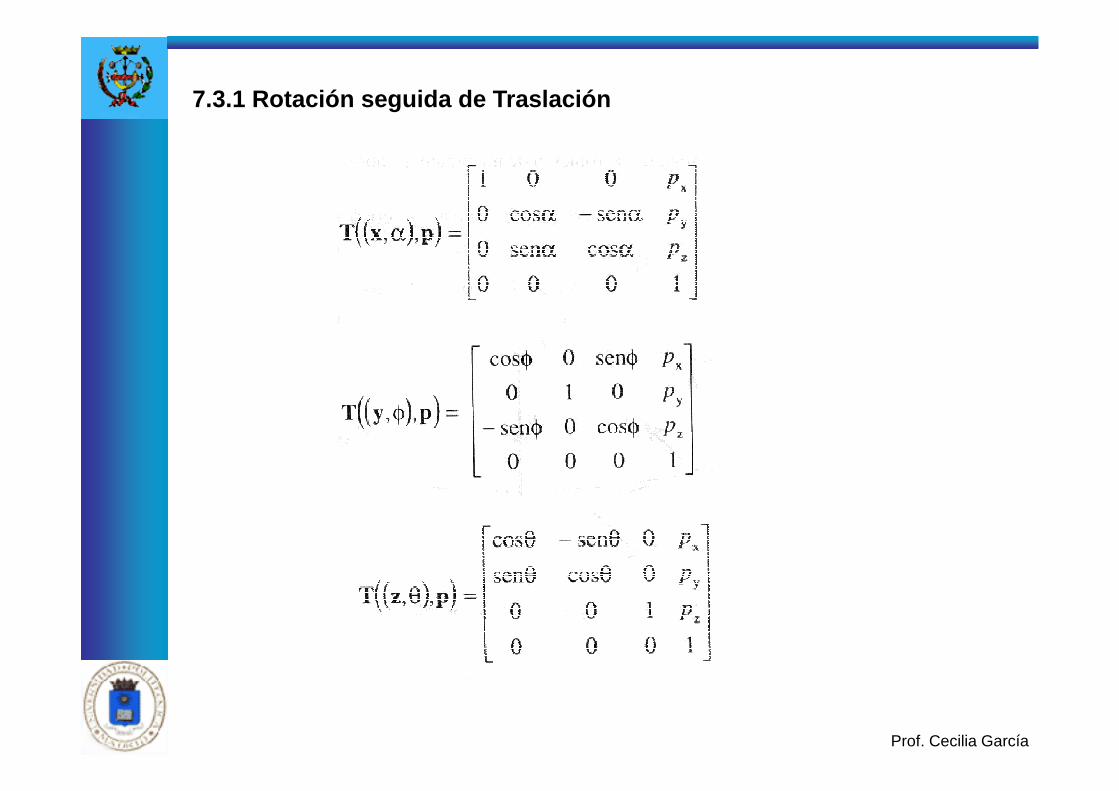
7.3.1 Rotación seguida de Traslación
Prof. Cecilia García
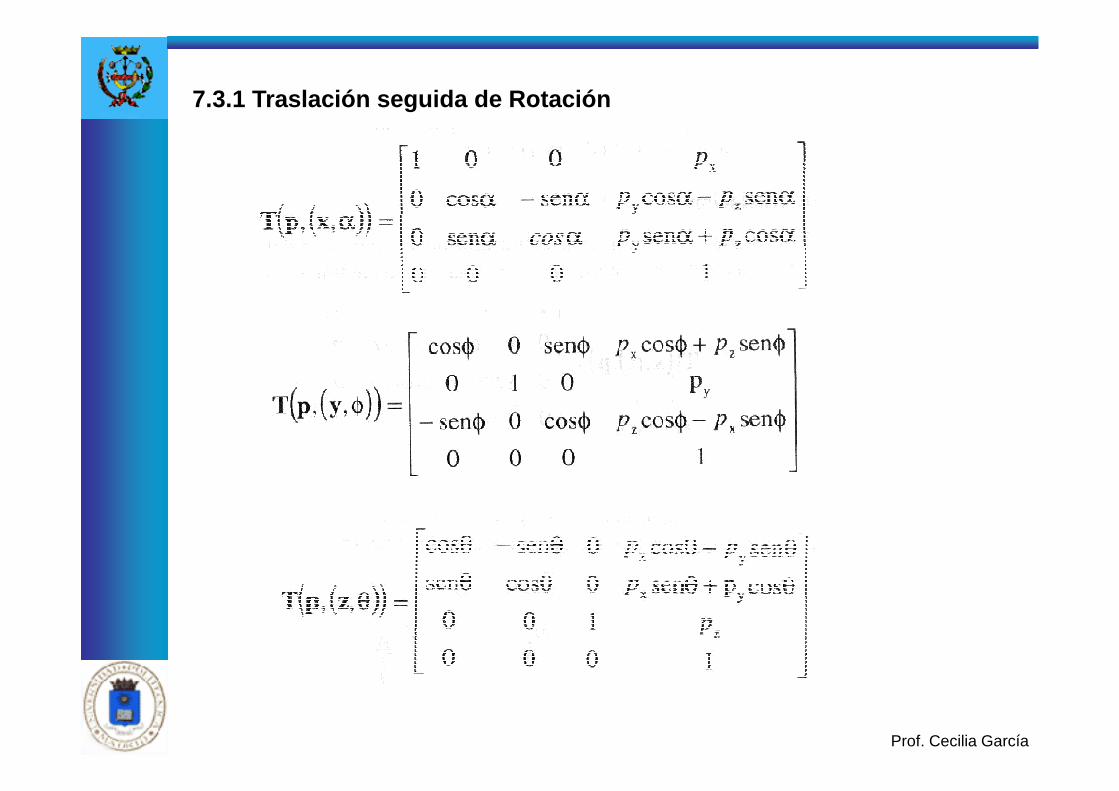
7.3.1 Traslación seguida de Rotación
Prof. Cecilia García

7.4 Variante en la notación
Donde n,o,a es una terna ortonormal que representa la orientación y p es un vector que representa la posición.
Prof. Cecilia García
un vector que representa la posición.

7.5 Gráficos de transformación
Es frecuente encontrar situaciones en las que la localización espacial de un objeto o de su sistema de referencia asociado, pueda realizarse a través de la composición de diversas transformaciones distintas.
Prof. Cecilia García

Prof. Cecilia García
M R E M OR E H O H=T T T T T
Aplicación a la Robótica
Prof. Cecilia García
Contenido
1. Justificación
2. El problema cinemático directo
2.1 Método Geométrico
2.2 Matrices de Transformación homogénea
Prof. Cecilia García
3. Método de Denavit – Hartenberg (DH)
En esta segunda parte se aplicarán las herramientas matemáticas anteriores al área de la robótica. Tenemos dos objetivos:
1. Justificación
Obtener un modelo geométrico de la estructura que permita relacionar los grados de libertad (las variables/coordenadas generalizadas) con las coordenadas cartesianas de todos y cada uno de los puntos que constituyen el robot.
Objetivo 1
Cinemática directaSolución única para la mayor parte
Prof. Cecilia García
Cinemática directaSolución única para la mayor parte
de los robots seriales
Posicionar al robot. Esto es dadas las posiciones cartesianas como valores de entrada hallar los valores de las coordenadas generalizadas.
Objetivo 2
Cinemática inversa Puede haber 0, 1, 2…o infinitas soluciones.

La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia.
La cinemática se interesa por la descripción analítica del movimiento espacial del robot como una función del tiempo, y en particular por las relaciones entre la posición y orientación del extremo final del robot y los
Definición
Prof. Cecilia García
relaciones entre la posición y orientación del extremo final del robot y los valores que toman sus coordenadas articulares.

La cinemática directa consiste en obtener la posición en el espacio de la estructura a partir de los valores de las variables generalizadas (q) .
2. El Problema Cinemático Directo
Éstas están asociadas a las articulaciones y definen sus “propiedades” de movimiento, por lo que para las articulaciones de revolución la variable generalizada será un ángulo, y para las prismáticas un desplazamiento.
Prof. Cecilia García
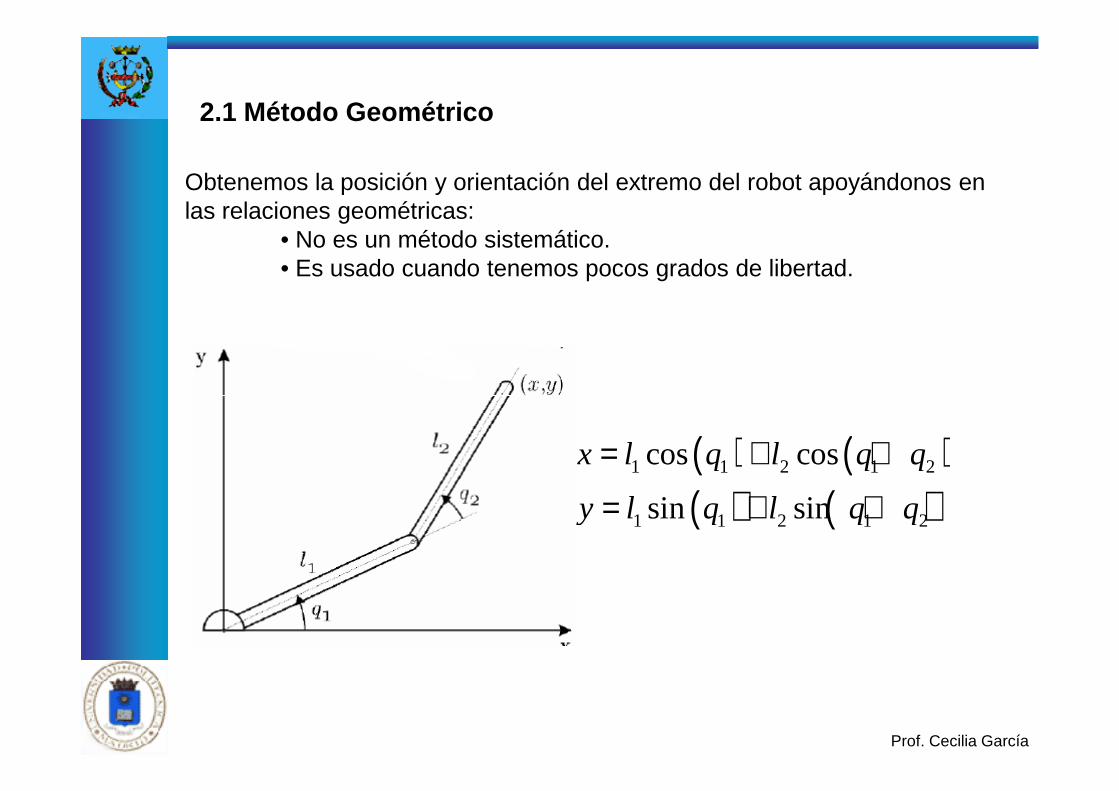
2.1 Método Geométrico
Obtenemos la posición y orientación del extremo del robot apoyándonos en las relaciones geométricas:
• No es un método sistemático.• Es usado cuando tenemos pocos grados de libertad.
Prof. Cecilia García
( ) ( )( ) ( )
1 1 2 1 2
1 1 2 1 2
cos cos
sin sin
x l q l q q
y l q l q q
= + +
= + +
2.2 Matrices de Transformación homogénea
• A cada eslabón se le asocia un sistema de referencia solidario.
• Es posible representar las traslaciones y rotaciones relativas entre los distintos eslabones.
• La matriz i-1A i representa la posición y orientación relativa entre los sistemas asociados a dos eslabones consecutivos del robot.
Prof. Cecilia García
• Representación total o parcial de la cadena cinemática del robot:0A3 = 0A1
1A2 2A3
T = 0A6 = 0A1 1A2
2A3 3A4
4A5 5A6
• Existen métodos sistemáticos para situar los sistemas de coordenadas asociados a cada eslabón y obtener la cadena cinemática del robot. Método de Denavit-Hartenberg (D-H)
3. Método de Denavit - Hartenberg
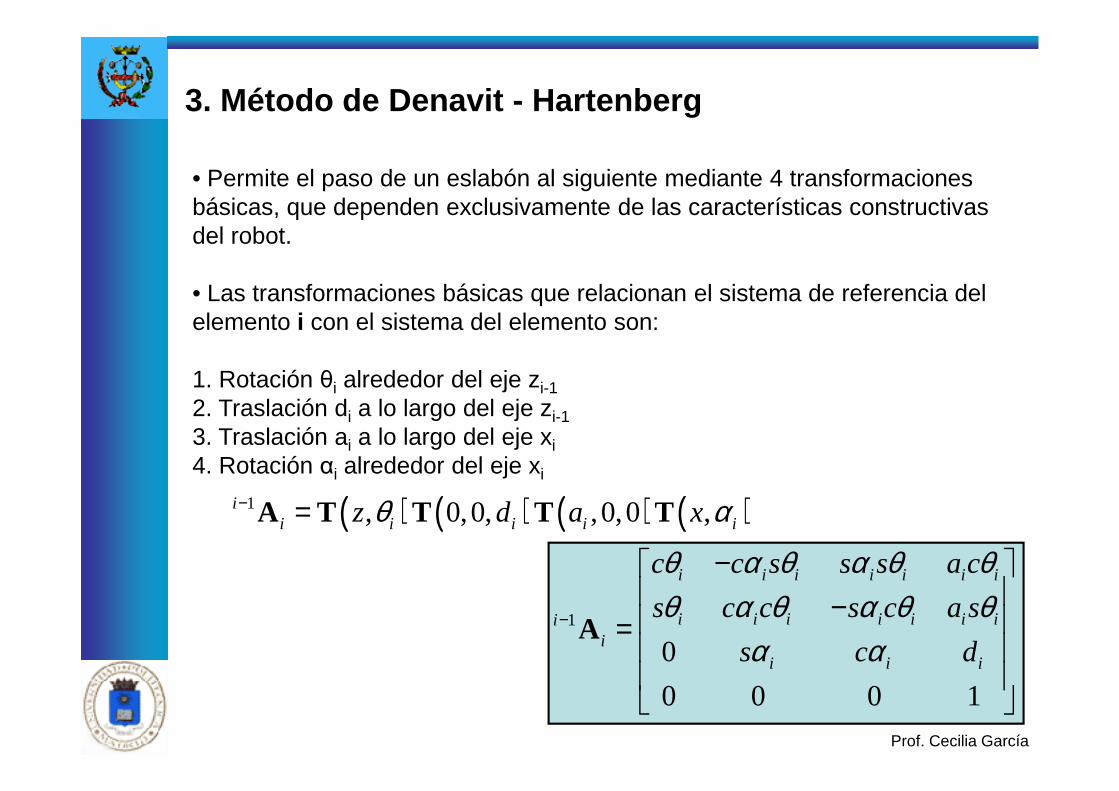
• Permite el paso de un eslabón al siguiente mediante 4 transformacionesbásicas, que dependen exclusivamente de las características constructivasdel robot.
• Las transformaciones básicas que relacionan el sistema de referencia delelemento i con el sistema del elemento son:
1. Rotación θi alrededor del eje zi-12. Traslación d a lo largo del eje z
Prof. Cecilia García
i i-12. Traslación di a lo largo del eje zi-13. Traslación ai a lo largo del eje xi4. Rotación αi alrededor del eje xi
( ) ( ) ( ) ( )1 , 0,0, ,0,0 ,ii i i i iz d a xθ α− =A T T T T
1
0
0 0 0 1
i i i i i i i
i i i i i i iii
i i i
c c s s s a c
s c c s c a s
s c d
θ α θ α θ θθ α θ α θ θ
α α−
− − =
A
1) Numerar los eslabones comenzando con 1 (primer eslabón móvil de la cadena) y acabando con n (último eslabón móvil). Se numerará como eslabón 0 a la base fija del robot.
2) Numerar cada articulación comenzando por 1 (la correspondiente al primer grado de libertad) y acabando en n.
3) Localizar el eje de cada articulación. Si ésta es rotativa, el eje será su propio eje de giro. Si es prismática, será el eje a lo largo del cual se produce el desplazamiento.
4) Para i de 0 a n-1 situar el eje z sobre el eje de la articulación i+1. 4) Para i de 0 a n-1 situar el eje zi sobre el eje de la articulación i+1.
5) Situar el origen del sistema de la base {S0} en cualquier punto del eje z0. Los ejes x0 e y0 se situarán de modo que formen un sistema dextrógiro con z0.
6) Para i de 1 a n-1, situar el sistema {Si} (solidario al eslabón i) en la intersección del eje zi con la línea normal común a zi-1 y zi. Si ambos ejes se cortasen se situaría {Si} en el punto de corte. Si fuesen paralelos {Si} se situaría en la articulación i+1.
Prof. Cecilia García

7) Para i de 1 a n-1, situar xi en la línea normal común a zi-1 y zi.
8) Para i de 1 a n-1, situar yi de modo que forme un sistema dextrógiro con xiy zi.
9) Situar el sistema {Sn} en el extremo del robot de modo que zn coincida con la dirección de zn-1 y xn sea normal a zn-1 y zn.
10) Obtener θi como el ángulo que hay que girar en torno a zi-1 para que xi-1 yxi queden paralelos.xi queden paralelos.
11) Obtener di como la distancia, medida a lo largo de zi-1, que habría que desplazar {Si-1} para que xi y xi-1 quedasen alineados.
12) Obtener ai como la distancia medida a lo largo de xi, que ahora coincidiría con xi-1, que habría que desplazar el nuevo {Si-1} para que su origen coincidiese con {Si}.
13) Obtener αi como el ángulo que habría que girar en torno a xi, que ahora coincidiría con xi-1, para que el nuevo {Si-1} coincidiese totalmente con {Si}.
Prof. Cecilia García

14) Obtener las matrices de transformación i-1Ai.
15) Obtener la matriz de transformación que relaciona el sistema de la base con el del extremo del robot:
T = 0A11A2 ... n-1An
16) La matriz T define la orientación (submatriz de rotación) y posición (submatriz de traslación) del extremo referidas a la base en función de las n coordenadas articulares.
Prof. Cecilia García

2 3
4
DH-1) Numerar los eslabones comenzando con 1 (primer eslabón móvil de la cadena) y acabando con n (último eslabón móvil). Se numerará como eslabón 0 a la base fija del robot.
0
1
4
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-2) Numerar cada articulación comenzando por 1 (la correspondiente al primer grado de libertad) y acabando en n.
0
1
41θ
2d
El robot tiene 4 d.o.f. por lo tanto n=4
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-3) Localizar el eje de cada articulación. Si ést a es rotativa, el eje será su propio eje de giro. Si es prismática, será el eje a lo lar go del cual se produce el desplazamiento
4l
0
1
41θ
2d
1l
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-4) Para i de 0 a n-1 situar el eje z i sobre el eje de la articulación i+1.
4l
2z3z
0
1
41θ
2d
1l
=
3
2
1
0
i
0z
1z
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-5) Situar el origen del sistema de la base {S 0} en cualquier punto del eje z 0. Los ejes x 0 e y0 se situarán de modo que formen un sistema dextrógir o con z 0.
4l
2z3z
0
1
41θ
2d
1l
=
3
2
1
0
i
0z
1z
0x
0y
Prof. Cecilia García
2 3
41θ
3d
4θ
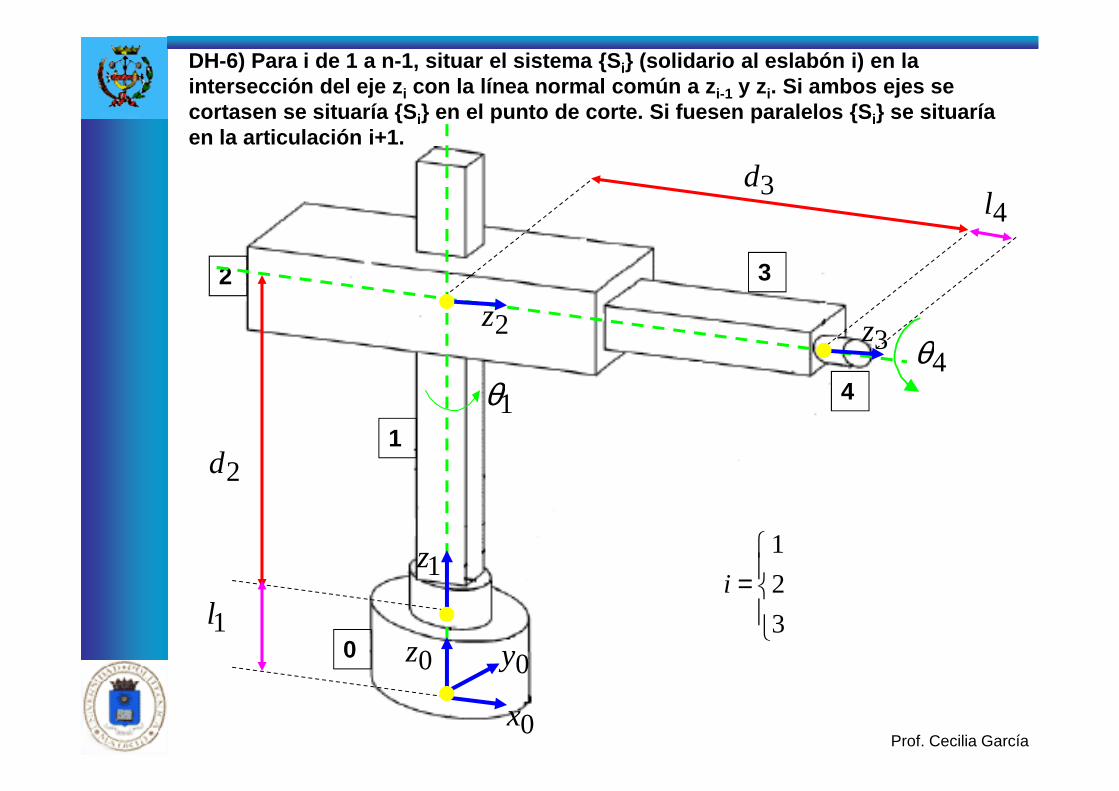
DH-6) Para i de 1 a n-1, situar el sistema {S i} (solidario al eslabón i) en la intersección del eje z i con la línea normal común a z i-1 y z i. Si ambos ejes se cortasen se situaría {S i} en el punto de corte. Si fuesen paralelos {S i} se situaría en la articulación i+1.
4l
2z3z
0
1
41θ
2d
1l
=3
2
1
i
0z
1z
0x
0y
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-7) Para i de 1 a n-1, situar xi en la línea normal común a zi-1 y zi.
4l
2z3z
2x3x
3z
3x
0
1
41θ
2d
1l
=3
2
1
i
0z
1z
0x
0y1x
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-8) Para i de 1 a n-1, situar yi de modo que forme un sistema dextrógiro con xi y zi.
4l
2z3z
2x3x
3z
3x
2y
3y
0
1
41θ
2d
1l
=3
2
1
i
0z
1z
0x
0y1x
1y
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-9) Situar el sistema {S n} en el extremo del robot de modo que zn coincida con la dirección de zn-1 y xn sea normal a zn-1 y zn.
4l
2z3z
2x3x
3z
3x
2y
3y
0
1
41θ
2d
1l
=3
2
1
i
0z
1z
4z
0x
0y1x
4x
1y
4y
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-10) Obtener θi como el ángulo que hay que girar en torno a zi-1 para que xi-1 yxi queden paralelos.
4l
2z3z
2x3x
3z
3x
2y
3y
0
1
41θ
2d
1l
0z
1z
4z
0x
0y1x
4x
1y
4y
Prof. Cecilia García
2 3
41θ
3d
4θ
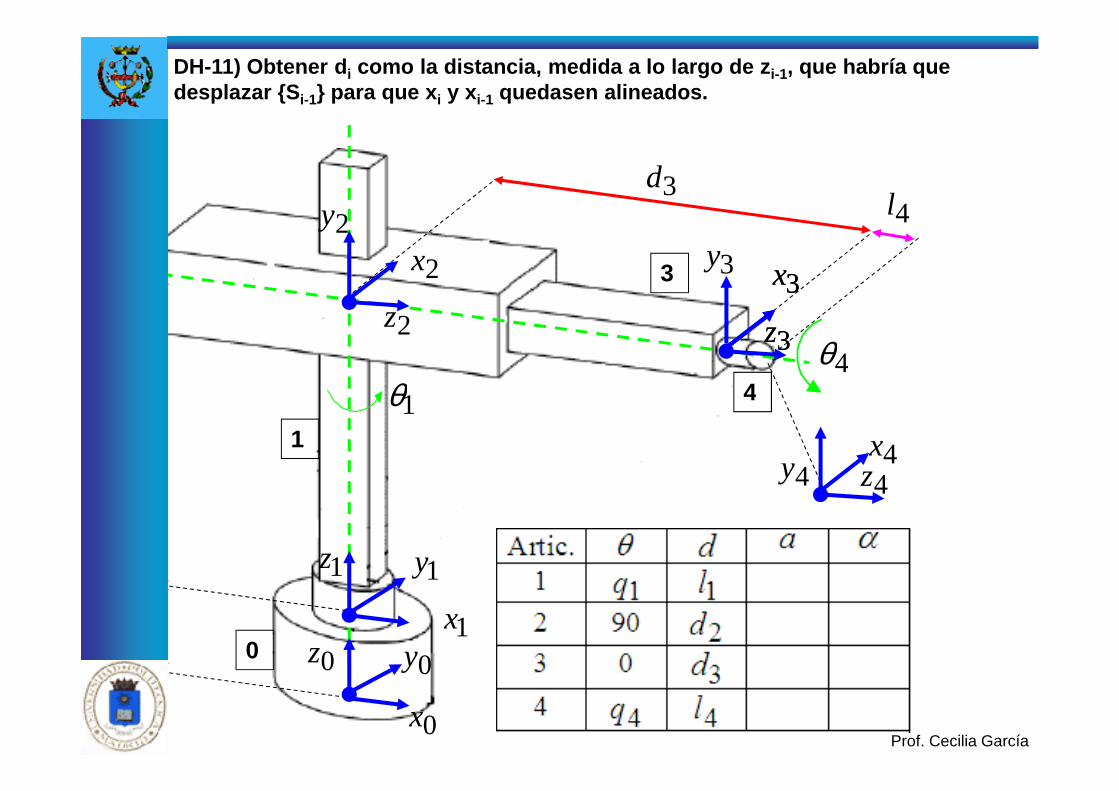
DH-11) Obtener di como la distancia, medida a lo largo de zi-1, que habría que desplazar {S i-1} para que xi y xi-1 quedasen alineados.
4l
2z3z
2x3x
3z
3x
2y
3y
0
1
41θ
2d
1l
0z
1z
4z
0x
0y1x
4x
1y
4y
Prof. Cecilia García

2 3
41θ
3d
4θ
DH-12) Obtener ai como la distancia medida a lo largo de xi, que ahora coincidiría con xi-1, que habría que desplazar el nuevo {S i-1} para que su origen coincidiese con {S i}.
4l
2z3z
2x3x
3z
3x
2y
3y
0
1
41θ
2d
1l
0z
1z
4z
0x
0y1x
4x
1y
4y
Prof. Cecilia García
2 3
41θ
3d
4θ
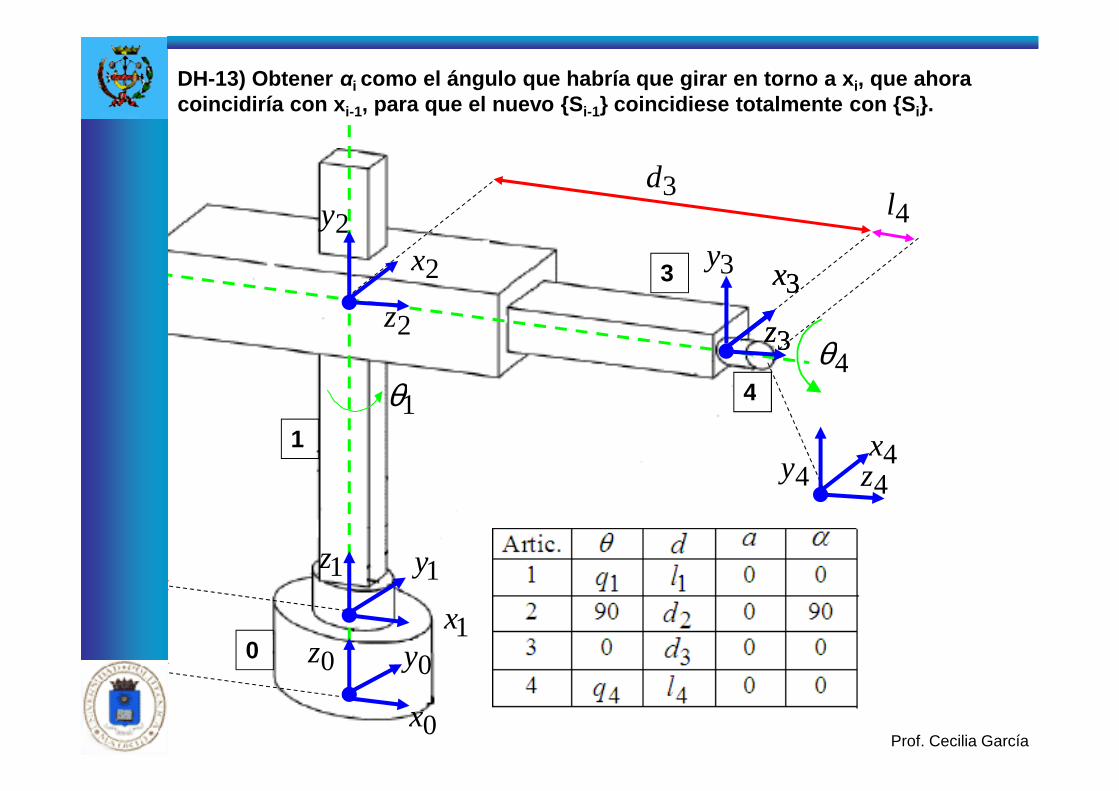
DH-13) Obtener αi como el ángulo que habría que girar en torno a xi, que ahora coincidiría con xi-1, para que el nuevo {S i-1} coincidiese totalmente con {S i}.
4l
2z3z
2x3x
3z
3x
2y
3y
0
1
41θ
2d
1l
0z
1z
4z
0x
0y1x
4x
1y
4y
Prof. Cecilia García

DH-14) Obtener las matrices de transformación i-1Ai.
=010
0001
0100
22
1d
A
−
=100
00
00
1
11
11
10
l
CqSq
SqCq
A
−−
=−
1000
01
iii
iiiiiii
iiiiiii
ii
dCS
SaCSCCS
CaSSSCC
Aαα
θθαθαθθθαθαθ
1000
010 2d
1000
100 1l
=
1000
100
0010
0001
33
2d
A
−
=
1000
100
00
00
4
44
44
43
l
CqSq
SqCq
A
Prof. Cecilia García

DH-15) Obtener la matriz de transformación que rela ciona el sistema de la base con el del extremo del robot: T = 0A1
1A2 ... n-1An
0100
−
=
1000
100
00
00
1
11
11
10
l
CqSq
SqCq
A
−−
=−
1000
01
iii
iiiiiii
iiiiiii
ii
dCS
SaCSCCS
CaSSSCC
Aαα
θθαθαθθθαθαθ
43
32
21
10 AAAAT =
( ) +− ldCqCqSqSqCqSq
=
1000
010
0001
0100
22
1d
A
=
1000
100
0010
0001
33
2d
A
−
=
1000
100
00
00
4
44
44
43
l
CqSq
SqCq
A
( )( )
+++−
=
1000
1 1244
43114141
43114141
ldCqSq
ldSqSqSqCqCqCq
ldCqCqSqSqCqSq
T
Prof. Cecilia García
Prof. Cecilia García