geometría del plano y del espacio -...
TRANSCRIPT

Tema 6
Geometría del plano y del espacio
6.1. Sistemas de coordenadas
6.1.1. Sistema de coordenadas en el plano
Vamos a describir dos sistemas de coordenadas en el plano:
sistema de coordenadas cartesiano
sistema de coordenadas polares
Sistema de coordenadas cartesiano: Un punto P en el plano se representa por un par decoordenadas reales (a, b), llamadas coordenadas cartesianas de P cuya representaciónen el plano es la siguiente:
se trazan en el plano 2 rectas perpendiculares entre sí en las direcciones de los vectores(1, 0) y (0, 1), y que se cortan en el punto (0, 0). Dichas rectas perpendiculares sonlos ejes del sistema, que se denotan OX y OY .
a es el segmento proyección de P sobre el eje OX, y se llama abcisa de P .
b es el segmento proyección de P sobre el eje OY , y se llama ordenada de P .
OX es, por tanto, el eje de abcisas; y OY es el eje de ordenadas.
los vectores {(1, 0), (0, 1)} forman una base ortonormal del sistema (ver Sección6.2.1).
Sistema de coordenadas polares: Un punto P en el plano se representa a través de lossiguientes elementos:
distancia del origen O = (0, 0) al punto P :−−→OP , que se llama radio polar y se
denota por ρ ó r.
ángulo formado por el eje de abcisas OX y el segmento OP : α, que se denominaargumento o ángulo polar.
Relación entre ambos sistemas:
1

Matemáticas Aplicadas a la Óptica Tema 6
b→ a) Dado un punto en coordenadas polares P = (ρ, α), su expresión en coordenadascartesianas viene dado por:{
x = ρ cos(α), ρ ≥ 0,y = ρ sen(α), α ∈ [0, 2π)
a→ b) Dado un punto en coordenadas cartesianas P = (x, y), su expresión en coordenadaspolares viene dado por:
ρ =√x2 + y2, x ∈ R,
α = arctan(yx
), y ∈ R
Nota 6.1.1 La determinación del ángulo α sigue la misma regla de cuadrantes que lautilizada para determinar el argumento de un número complejo.
Ejercicio 6.1.2 Dadas las coordenadas cartesianas del punto P = (1, 2), obtener sus coor-denadas polares.Sol: P = (
√5, arctan(2))
Ejercicio 6.1.3 Dadas las coordenadas polares del punto P = (3, π/2), obtener sus coor-denadas cartesianas.Sol: P = (0, 3)
6.1.2. Sistema de coordenadas en el espacio
Consideramos 3 sistemas de coordenadas en el espacio:
Coordenadas cartesianas
Coordenadas cilíndricas
Coordenadas esféricas
• Coordenadas cartesianas en el espacio:Un punto P en el espacio se puede representar a través de una terna de números reales(a, b, c) llamadas coordenadas cartesianas de P . Dichas coordenadas representan:
se trazan en el espacio 3 rectas perpendiculares entre sí en las direcciones de losvectores (1, 0, 0) y (0, 1, 0) y (0, 0, 1), que forman una base de R3 y que se cortanen el punto (0, 0, 0). Dichas rectas perpendiculares son los ejes del sistema, que sedenotan OX, OY y OZ.
a es el segmento proyección de P sobre el eje OX, y se llama abcisa de P .
b es el segmento proyección de P sobre el eje OY , y se llama ordenada de P .
c es el segmento proyección de P sobre el eje OZ, y se llama cota de P .
Dpto. Ecuaciones Diferenciales y Análisis Numérico—2— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
los vectores {(1, 0, 0), (0, 1, 0), (0, 0, 1)} forman una base ortonormal del sistema(ver Sección 6.2.1).
En el espacio dos vectores que se cortan determinan un plano. Así, los ejes coordenadosdefinen dos a dos los planos:
el plano OXY es el determinado por los ejes OX y OY .
el plano OXZ es el determinado por los ejes OX y OZ.
el plano OY Z es el determinado por los ejes OY y OZ.
• Coordenadas cilíndricas: Son la generalización de las coordenadas polares en el plano.Sea P un punto con coordenadas cartesianas (x, y, z), sus coordenadas cilíndricas (r, θ, z)vienen dadas por:
r =√x2 + y2, r > 0
θ = arctan(yx
), θ ∈ [0, 2π) [usar regla de cuadrantes]
z = z, z ∈ R
Dichas coordendas permiten que los cilindros circulares se describan como r = c en coor-dendas cilíndricas (de forma más fácil que en cartesianas), de ahí su nombre.
Recíprocamente, dadas las coordenadas cilíndricas de P = (r, θ, z), sus coordenadas carte-sianas vienen dadas por:
x = r cos(θ), x ∈ Ry = r sen(θ), y ∈ Rz = z, z ∈ R
Geométricamente, r es el radio polar de P ′ = proyección de P sobre el plano OXY , θ esel argumento de P ′ y z es la cota de P (distancia del punto P al plano OXY ).
Ejercicio 6.1.4 Hallar las coordenadas cilíndricas del punto P = (3, 3, 1). Sol: P =(3√
2, π4 , 1).
Ejercicio 6.1.5 Hallar las coordenadas cartesianas del punto P = (1, π3 , 1). Sol: P =
(12 ,√32 , 1).
• Coordenadas esféricas: Son otra generalización de las coordenadas polares en el plano.Sea P un punto con coordenadas cartesianas (x, y, z), sus coordenadas esféricas (ρ, θ, ϕ)vienen dadas por:
ρ =√x2 + y2 + z2, ρ > 0
θ = arctan(yx
), θ ∈ [0, 2π) [usar regla de cuadrantes]
ϕ = arctan(zr
)= arctan
(z√
x2 + y2
), ϕ ∈
[−π
2,π
2
] {si z > 0, entonces ϕ ∈ [0, π2 ]
si z < 0, entonces ϕ ∈ [−π2 , 0]
donde
Dpto. Ecuaciones Diferenciales y Análisis Numérico—3— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
ρ representa la distancia de P al origen,
θ es el ángulo polar o argumento de P ′, siendo P ′ la proyección de P en el planoOXY ,
ϕ es el ángulo que forma el radio vector de P , es decir, OP , con el plano OXY .
Como casos particulares:
ρ = c describe una esfera,
θ = c un semiplano vertical, y
ϕ = c un cono de eje OZ,
luego dichas superficies tienen una expresión más fácil en coordenadas esféricas que encartesianas, lo que es una motivación para el uso de este tipo de coordenadas.
Para pasar de coordenadas esféricas a coordenadas cartesianas usamos las coordenadaspolares para (x, y), es decir, {
x = r cos(θ),y = r sen(θ)
con r el radio vector de P ′, es decir, r = ρ cos(ϕ). Para z usamos que es la proyeccióndel vector
−−→OP con el eje OZ, es decir, z = ρ sen(ϕ). En resumen, dadas las coordenadas
esféricas de P = (ρ, θ, ϕ), sus coordenadas cartesianas vienen dadas por:x = ρ cos(θ) cos(ϕ), x ∈ Ry = ρ sen(θ) cos(ϕ), y ∈ Rz = ρ sen(ϕ), z ∈ R
• Paso de coordenadas esféricas a coordenadas cilíndricas: Para pasar de coorde-nadas esféricas de P = (ρ, θ, ϕ) a coordenadas cilíndricas P = (r, θ, z) usamos las fórmulas:
r = ρ cos(ϕ),
θ = θ,
z = ρ sen(ϕ)
• Paso de coordenadas coordenadas cilíndricas a esféricas: Para pasar de coorde-nadas cilíndricas P = (r, θ, z) a coordenadas esféricas de P = (ρ, θ, ϕ) usamos las fórmulas:
ρ =√r2 + z2,
θ = θ,
ϕ = arctan(zr
)
Ejercicio 6.1.6 Hallar las coordenadas esféricas del punto (1,−1, 1). Sol:(√
3, 7π4 , arctan(√
22
))Ejercicio 6.1.7 Hallar las coordenadas cartesianas del punto
(3, π6 ,
π4
). Sol:
(3√6
4 , 3√2
4 , 3√2
2
)
Dpto. Ecuaciones Diferenciales y Análisis Numérico—4— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
6.2. Vectores en el plano y en el espacio
Dados dos puntos en el plano P = (p1, p2) y Q = (q1, q2) se denomina vector−−→PQ al vector
con origen en P y extremo en Q cuyas componentes son:
−−→PQ = (q1 − p1, q2 − p2).
Dicho vector es equivalente al que tiene como origen O = (0, 0) y extremo el punto decoordenadas (q1 − p1, q2 − p2).
Dados dos puntos en el espacio P = (p1, p2, p3) y Q = (q1, q2, q3) se denomina vector−−→PQ
al vector con origen en P y extremo en Q cuyas componentes son:
−−→PQ = (q1 − p1, q2 − p2, q3 − p3).
Dicho vector es equivalente al que tiene como origen O = (0, 0, 0) y extremo el punto decoordenadas (q1 − p1, q2 − p2, q3 − p3).
La distancia entre dos puntos P y Q es el módulo del vector que los une−−→PQ, es decir,
dist(P,Q) = ‖−−→PQ‖ =
√(q1 − p1)2 + (q2 − p2)2 en el plano
dist(P,Q) = ‖−−→PQ‖ =
√(q1 − p1)2 + (q2 − p2)2 + (q3 − p3)2 en el espacio.
6.2.1. Producto escalar y vectorial. Norma de vectores. Ortonormaliza-ción.
El objetivo de esta sección es obtener a partir de una base cualquiera una base de vectoresortogonales (base ortogonal). Para ello necesitamos definir los siguientes conceptos:
• Producto escalar en Rn: Dados dos vectores ~u = (u1, u2, . . . , un) y ~v = (v1, v2, . . . , vn)de Rn se define el producto escalar de ~u por ~v como el número real que viene dado por:
~u · ~v = u1 · v1 + u2 · v2 + · · ·+ un · vn
• Norma de vectores: Dado un vector ~u = (u1, u2, . . . , un) ∈ Rn, se llama norma delvector ~u en Rn al número real definido por:
‖~u‖ =√~u · ~u =
√u21 + u22 + · · ·+ u2n
Como estamos en Rn, esta norma se llama módulo del vector ~u. Se dice que ~u es unvector unitario si ‖~u‖ = 1. Dicha norma verifica las siguientes propiedades:
‖c~u‖ = |c| ‖~u‖ para c ∈ R.
‖~u+ ~v‖ ≤ ‖~u‖+ ‖~v‖ (desigualdad triangular)
Dpto. Ecuaciones Diferenciales y Análisis Numérico—5— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
• Vectores ortogonales: Dos vectores ~u y ~v son ortogonales cuando su producto escalares cero, es decir, ~u · ~v = 0.
• Ángulo que forman dos vectores en R2 y R3: Dos vectores ~u y ~v de R2 ó R3 verificanla expresión:
~u · ~v = ‖~u‖‖~v‖ cos(~u,~v),
de manera que se puede deducir el ángulo que forman.
• Base ortonormal: Sea {~u1, ~u2, . . . , ~un} una base de Rn, es decir, un conjunto de nvectores linealmente independientes de Rn. Se llama base ortonormal si se verifican lassiguientes condiciones: {
~ui · ~uj = 1 si i = j,
~ui · ~uj = 0 si i 6= j,(6.1)
• Matrices ortogonales: Una matriz real A es ortogonal si
A−1 = At
• Ortonormalización de una base: Dada una base de Rk, {~w1, ~w2, . . . , ~wk}, existe unabase ortogonal de Rk, {~u1, ~u2, . . . , ~uk}, tal que cada ~ui es una combinación lineal de los ~wi.Para obtener dicha base ortogonal se puede seguir el Método de ortonormalización deGram-Schmidt.
?Método de ortonormalización de Gram-Schmidt:Dada una base de Rk, {~w1, ~w2, . . . , ~wk},la nueva base ortogonal {~u′1, ~u′2, . . . , ~u′k} se obtiene de la siguiente forma: Imponemos quelos nuevos vectores se obtienen como:
~u′1 = ~w1
~u′2 = ~w2 + a21 ~u′1
~u′3 = ~w3 + a31 ~u′1 + a32 ~u
′2
......
...~u′k = ~wk + ak1 ~u
′1 + ak2 ~u
′2 + · · ·+ akk−1 ~u
′k−1
de manera que la nueva base sea ortogonal, es decir, verifiquen la condición (6.1). De semodo, obtenemos que el coeficiente para ~u2 es:
0 = ~u′2 · ~u′1 = (~w2 + a21 ~u′1) · ~w1 = ~w2 · ~u′1 + a21 ~u
′1 · ~u′1 = ~w2 · ~u′1 + a21 ‖~u′1‖2
luego
a21 = − ~w2 · ~u′1‖~u′1‖2
.
Para obtener los coeficientes de ~u′3, imponemos la ortogonalidad de ~u′1 y ~u′3:
0 = ~u′3 · ~u′1 = (~w3 + a31 ~u′1 + a32 ~u
′2) · ~u′1 = ~w3 · ~u′1 + a31 ~u
′1 · ~u′1 + a32 ~u
′2 · ~u′1
= ~w3 · ~u′2 + a31 ‖~u′1‖2
luego
a31 = − ~w3 · ~u′1‖~u′1‖2
.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—6— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Para la ortogonalidad de ~u′2 y ~u′3, imponemos:
0 = ~u′3 · ~u′2 = (~w3 + a31 ~u′1 + a32 ~u
′2) · ~u′2 = ~w3 · ~u′2 + a31 ~u
′1 · ~u′2 + a32 ~u
′2 · ~u′2
= ~w3 · ~u′2 + a32 ‖~u′2‖2
luego
a32 = − ~w3 · ~u′2‖~u′2‖2
.
Realizando el mismo proceso iterativamente, llegamos a que:
aij = −~wi · ~u′j‖~u′j‖2
, i, j = 1, 2, . . . , k.
Con este proceso, la base obtenida es ortogonal. La base ortonormal que buscamos será{~u1, ~u2, . . . , ~uk} que se obtiene dividiendo cada vector por módulo, es decir:
~ui =~u′i‖~u′i‖
, i = 1, 2, . . . , k.
Ejercicio 6.2.1 Dada la base de autovectores {(1, 2,−3), (1, 1,−1)} encontrar otra que seaortonormal.Sol: Consideramos ~w1 = (1, 2,−3), ~w2 = (1, 1,−1). Buscamos {~u1, ~u2} usando el métodode Gram-Schmidt, donde primero calculamos ~u′1, ~u
′2 de la forma:{
~u′1 = ~w1 = (1, 2,−3),
~u′2 = ~w2 + a21 ~u′1 = (1, 1− 1) + a21 (1, 2,−3)
donde a21 = −−~w2 · ~u′1‖~u′1‖2
= −(1, 1,−1) · (1, 2− 3)
‖(1, 2,−3)‖2= −3
7. Por tanto, ~u′2 =
(4
7,1
7,2
7
).
Dividiendo ~u′1, ~u′2 por su módulo, obtenemos:
~u1 =
(1√14,
2√14,− 3√
14
), ~u2 =
(4√21,
1√21,
2√21
)
Ejercicio 6.2.2 Dada la siguiente base {~v1, ~v2, ~v3}, encuentra otra base ortonormal equi-valente, siendo:
~v1 = (1, 0, 1), ~v2 = (1, 1, 1), ~v3 = (1,−1, 2).
Sol: Observemos que {~v1, ~v2, ~v3} no es una base ortogonal (los vectores no son ortogonalesentre sí dos a dos), y no es ortonormal ya que:
‖~v1‖ =√
2, ‖~v2‖ =√
3, ‖~v3‖ =√
6.
Por tanto, para obtener una base ortonormal tenemos que aplicar el método de ortonorma-lización de Gram-Schmidt.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—7— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Creamos primero una base {~u′1, ~u′2, ~u′3} ortogonal de la forma:~u′1 = ~v1~u′2 = ~v2 + a21~u
′1
~u′3 = ~v3 + a31~u′1 + a32~u
′2,
dondea21 = −~v2 · ~u
′1
‖~u′1‖2= −1, a31 = −~v3 · ~u
′1
‖~u′1‖2= −3
2, a32 = −~v3 · ~u
′2
‖~u′2‖2= 1,
de manera que:
~u′1 =
101
, ~u′2 =
010
, ~u′3 =
−1
2
0
1
2
.
Como ‖~u′1‖ =√
2, ‖~u′2‖ = 1 y ‖~u′3‖ =
√2
2, la base ortonormal {~u1, ~u2, ~u3} que buscamos
será:
~u1 =
√2
2
0√
2
2
, ~u2 =
0
1
0
, ~u3 =
−√
2
2
0√
2
2
.
• Producto vectorial en R3: Dados dos vectores ~u = (u1, u2, u3) y ~v = (v1, v2, v3) de R3
se define el producto vectorial de ~u por ~v como el vector que viene dado por:
~u× ~v =
∣∣∣∣∣∣~i ~j ~ku1 u2 u3v1 v2 v3
∣∣∣∣∣∣ = (u2 v3 − u3 v2, u3 v1 − u1 v3, u1 v2 − u2 v1)
El producto vectorial ~w = ~u× ~v de dos vectores ~u y ~v verifica las siguientes propiedades:
el vector ~u× ~v es ortogonal a los vectores ~u y ~v,
el módulo del producto vectorial ~u× ~v es el área del paralelogramo de lados los dosvectores que intervienen en el producto, es decir:
A = ‖~u× ~v‖ = ‖~u‖‖~v‖ sen(~u,~v)
el volumen del paralelepípedo de lados ~a = (a1, a2, a3), ~b = (b1, b2, b3) y ~c =(c1, c2, c3) viene dado por la expresión:
V = |~a · (~b× ~c)| =
∣∣∣∣∣∣det a1 a2 a3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ .
Dpto. Ecuaciones Diferenciales y Análisis Numérico—8— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
6.3. Diagonalización de matrices simétricas.
En el Tema 2, hemos visto que para diagonalizar una matriz cuadrada A basta encontraruna base de autovectores de A. Sin embargo, el cálculo de la inversa de la matriz depaso asociada (en caso de existir) es tedioso. Por otra parte, sabemos que existen sistemasde referencia ortogonales, es decir, que sus vectores son perpendiculares entre sí. Porejemplo, {(1, 0), (0, 1)} en el plano y {(1, 0, 0), (0, 1, 0), (0, 0, 1)} en el espacio (sistemasde referencia en coordenadas cartesianas). Veamos que las matrices cuadradas verificanalgunas propiedades especiales.
Concretamente, las matrices simétricas verifican las siguientes propiedades:
Sus autovalores son reales.
Son siempre diagonalizables.
Los autovectores correspondientes a autovalores distintos son siempre ortogonales.
Pueden diagonalizarse mediante una matriz de paso ortogonal.
Ejercicio 6.3.1 Diagonalizar la matriz simétrica A =
0 1 11 0 11 1 0
y comprobar las pro-
piedades anteriores.Sol: Dicha matriz posee como autovalores λ1 = λ2 = −1 (doble), λ3 = 2, que son autova-lores reales.Calculemos ahora los autovectores de A:
autovectores asociados al autovalor λ1 = −1: Para ello, resolvemos el sistema:
(A− Id)~v =
1 1 11 1 11 1 1
x1x2x3
=
000
,
que es equivalente a: {x1 + x2 + x3 = 0
Observemos que en este caso tenemos dos autovectores asociados:
~v1 =
−110
, ~v2 =
0−11
.
autovectores asociados al autovalor λ1 = 2: Para ello, resolvemos el sistema:
(A− Id)~v =
−2 1 11 −2 11 1 −2
x1x2x3
=
000
,
que es equivalente a: {−2x1 + x2 + x3 = 0x1 − 2x2 + x3 = 0
Dpto. Ecuaciones Diferenciales y Análisis Numérico—9— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Observemos que en este caso tenemos un autovector asociado:
~v3 =
111
.
Tenemos entonces tres autovectores linealmente independientes, luego la matriz es diago-nalizable. Podemos comprobar que los autovectores correspondientes a autovalores distintosson ortogonales, ya que:
~v1 · ~v3 = 0, ~v2 · ~v3 = 0.
Observemos que la base de autovectores obtenida {(−1, 1, 0), (0,−1, 1), (1, 1, 1)} no es orto-normal. Para obtener una matriz de paso ortogonal, debemos obtener una base ortonormalde autovectores. Usando el método de Gram-Schmidt, obtenemos:{(
− 1√2,
1√2, 0
),
(− 1√
6,− 1√
6,
√2
3
),
(1√3,
1√3,
1√3
)}.
De ese modo, la matriz de paso ortogonal es P =
− 1√
2− 1√
61√3
1√2− 1√
61√3
0√
23
1√3
. Observemos que
|P | = 1, P t = P−1 y A = P DP t siendo D =
−1 0 00 −1 00 0 2
.
6.4. Rectas y planos.
6.4.1. Rectas en el plano
La recta r que pasa por el punto P = (p1, p2) y tiene a ~v = (v1, v2) como vector directorse puede representar de varias formas. Una de ellas es:
r ≡ P + t~v, t ∈ R.
Cualquier punto (x, y) de la recta r se puede expresar de la forma:
(x, y) = (p1 + t v1, p2 + t v2), t ∈ R
o equivalentemente con las llamadas ecuaciones paramétricas de la recta:{x = p1 + t v1,y = p2 + t v2, t ∈ R
El vector ~v puede ser conocido u obtenerse como el vector que une dos puntos cualesquierade la recta r.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—10— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Despejando el valor de t en la primera de las dos ecuaciones anteriores y sustituyendodicho valor en la segunda ecuación, podemos obtener la llamada ecuación general deuna recta, que está escrita en coordenadas cartesianas y es de la forma:
a x+ b y + c = 0
También se puede obtener la ecuación general de una recta que pasa por los puntos P =(p1, p2) y Q = (q1, q2) de la forma: ∣∣∣∣∣∣
1 x y1 p1 p21 q1 q2
∣∣∣∣∣∣ = 0
Ejercicio 6.4.1 Encontrar las ecuaciones paramétricas y general de la recta que pasa porlos puntos P = (2, 1) y Q = (1,−3).Sol: La ecuación general de la recta es 4x− y − 7 = 0, y las ecuaciones paramétricas son:{
x = 2− t,y = 1− 4t, t ∈ R.
Dadas dos rectas en el plano, pueden darse los siguientes casos:
a) Las dos rectas se cortan en un punto.
b) Las dos rectas son paralelas.
c) Las dos rectas coinciden.
Dependiendo del tipo de ecuación de la recta que se conozca, se pueden clasificar lasposiciones relativas de dos rectas de la siguiente forma:
ec. paramétrica ec. general
rectas que se cortan rg
(u1 u2v1 v2
)= 2 rg
(a1 b1a2 b2
)= rg
(a1 b1 c1a2 b2 c2
)= 2
rectas paralelas rg
(u1 u2v1 v2
)= 1 y P /∈ r2 rg
(a1 b1a2 b2
)< rg
(a1 b1 c1a2 b2 c2
)= 2
rectas coincidentes rg
(u1 u2v1 v2
)= 1 y P ∈ r2 rg
(a1 b1a2 b2
)= rg
(a1 b1 c1a2 b2 c2
)= 1
donder1 ≡ P + t ~u = (p1, p2) + t (u1, u2), a1 x+ b1 y + c1 = 0
r2 ≡ Q+ s~v = (q1, q2) + s (v1, v2), a2 x+ b2 y + c2 = 0
Dpto. Ecuaciones Diferenciales y Análisis Numérico—11— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Ejercicio 6.4.2 Calcular la posición relativa de las siguientes rectas:
a) ≡{
x+ y = 0,2x+ y = 1
b) ≡{
x+ y = −2,2x+ 2y = 1
• Distancia de un punto a una recta en el plano: La distancia del punto P = (p1, p2)a la recta de ecuación general r ≡ ax+ by + c = 0 viene dada por la expresión:
d(P, r) =|ap1 + bp2 + c|√
a2 + b2
6.4.2. Rectas y planos en el espacio
• Rectas en el espacio: La recta r que pasa por el punto P = (p1, p2, p3) y tiene a~v = (v1, v2, v3) como vector director se puede representar de varias formas. Una de ellas es:
r ≡ P + t~v, t ∈ R.
Cualquier punto (x, y, z) de la recta r se puede expresar de la forma:
(x, y, z) = (p1 + t v1, p2 + t v2, p3 + t v3), t ∈ R
o equivalentemente con las llamadas ecuaciones paramétricas de la recta:x = p1 + t v1,y = p2 + t v2,z = p3 + t v3, t ∈ R
El vector ~v puede ser conocido u obtenerse como el vector que une dos puntos cualesquierade la recta r.Despejando el valor de t en la primera de las dos ecuaciones anteriores y sustituyendodicho valor en las otras ecuaciones, podemos obtener las llamadas ecuaciones generalesde una recta, que están escritas en coordenadas cartesianas y son de la forma:{
a1 x+ b1 y + c1 z + d1 = 0a2 x+ b2 y + c2 z + d2 = 0
Ejercicio 6.4.3 Encontrar las ecuaciones paramétricas y generales de la recta que pasapor los puntos P = (2, 1, 3) y Q = (5, 1,−3).Sol: Las ecuaciones paramétricas de la recta son:
x = 2 + 3t,y = 1,z = 3− 6t, tR
y las ecuaciones generales son: {2x+ z = 7,
y = 1
Dpto. Ecuaciones Diferenciales y Análisis Numérico—12— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Dadas dos rectas en el espacio, pueden darse los siguientes casos respecto a la posiciónrelativa de ambas rectas:
a) Las dos rectas se cortan en un punto.
b) Las dos rectas son paralelas.
c) Las dos rectas coinciden.
d) Las dos rectas se cruzan.
En esta ocasión, sólo presentamos su clasificación si son conocidas las ecuaciones paramé-tricas de ambas rectas:
ec. paramétricas
rectas que se cortan
rg
(u1 u2 u3v1 v2 v3
)= 2 y
rg
u1 u2 u3v1 v2 v3
p1 − q1 p2 − q2 p3 − q3
= 2
rectas paralelas rg
(u1 u2 u3v1 v2 v3
)= 1 y P /∈ r2
rectas coincidentes rg
(u1 u2 u3v1 v2 v3
)= 1 y P ∈ r2
rectas que se cruzan
rg
(u1 u2 u3v1 v2 v3
)= 2 y
rg
u1 u2 u3v1 v2 v3
p1 − q1 p2 − q2 p3 − q3
= 3
donder1 ≡ P + t ~u = (p1, p2, p3) + t (u1, u2, u3),
r2 ≡ Q+ s~v = (q1, q2, q3) + s (v1, v2, v3),
• Planos: El plano π que pasa por el punto P = (p1, p2, p3) y tiene a ~u = (u1, u2, u3)y ~v = (v1, v2, v3) como vectores directores se puede representar de varias formas. Una deellas es:
r ≡ P + t ~u+ s~v, t, s ∈ R.
Cualquier punto (x, y, z) de dicho plano π se puede expresar de la forma:
(x, y, z) = (p1 + t u1 + s v1, p2 + t u2 + s v2, p3 + t u3 + s v3), t, s ∈ R
Dpto. Ecuaciones Diferenciales y Análisis Numérico—13— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
o equivalentemente con las llamadas ecuaciones paramétricas del plano:x = p1 + t u1 + s v1,y = p2 + t u2 + s v2,z = p3 + t u3 + s v3, t, s ∈ R
Despejando el valor de t y s podemos obtener la llamada ecuación general del plano,que está escrita en coordenadas cartesianas y es de la forma:
a x+ b y + c z + d = 0
También se puede obtener la ecuación anterior construyendo el vector normal del plano~n, que se obtiene de la forma ~n = (a, b, c) = ~u × ~v. Imponiendo ahora que el plano deexpresión ax+ by + cz + d = 0 pase por el punto P obtenemos la expresión deseada.
Ejercicio 6.4.4 Encontrar las ecuaciones paramétricas y general del plano que pasa porlos puntos P = (2, 1, 3), Q = (5, 1,−3) y R = (0, 0, 1).Sol: Calculamos inicialmente los dos vectores linealmente independientes:
−−→PQ = (3, 0,−6),
−→PR = (−2,−1,−2).
Las ecuaciones paramétricas del plano vienen dadas por:x = 2 + 3t− 2sy = 1− sz = 3− 6t− 2s, t, s ∈ R
Despejando t y s en las ecuaciones anteriores obtenemos la ecuación general del plano:
2x− 6y + z − 1 = 0.
También podemos obtener la ecuación general del plano usando el vector normal ~n queviene dado por la expresión:
~n =
∣∣∣∣∣∣~i ~j ~k3 0 −6−2 −1 −2
∣∣∣∣∣∣ = (−6, 18,−3).
Imponemos ahora que el plano −6x + 18y − 3z + d = 0 pase por el punto P = (2, 1, 3),luego d = 3. Obtenemos de ese modo,
Π ≡ −6x+ 18y − 3z + 3 = 0.
Observemos que las dos expresiones obtenidas como ecuación general del plano son propor-cionales y, por tanto, ambas son válidas.
Dados dos planos en el espacio, la posición relativa de ambos puede presentar los siguientescasos:
a) Los dos planos se cortan en una recta.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—14— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
b) Los dos planos son paralelos.
c) Los dos planos coinciden.
Usando las ecuaciones generales del plano podemos concluir que:
ec. generales del plano
planos que se cortan rg
(a1 b1 c1a2 b2 c2
)= 2
planos paralelos rg
(a1 b1 c1a2 b2 c2
)= 1 y rg
(a1 b1 c1 d1a2 b2 c2 d2
)= 2
planos coincidentes rg
(a1 b1 c1a2 b2 c2
)= rg
(a1 b1 c1 d1a2 b2 c2 d2
)= 1
dondeπ1 ≡ a1x+ b1y + c1z + d1 = 0
π2 ≡ a2x+ b2y + c2z + d2 = 0
Ejercicio 6.4.5 Calcular la posición relativa de los siguientes planos:
a){π1 ≡ x+ y + z = 0,π2 ≡ 2x+ y − z = 1
b){π1 ≡ x+ y + z = −2,π2 ≡ 2x+ 2y + 2z = 1
• Distancia de un punto a un plano: La distancia del punto P = (p1, p2, p3) al planoπ ≡ ax+ by + cz + d = 0 viene dada pr la expresión:
d(P, π) =|ap1 + bp2 + cp3 + d|√
a2 + b2 + c2
6.5. Representación analítica de curvas y superficies. Cónicas
Una curva se puede definir como el lugar geométrico de los puntos del plano que verificanuna determinada propiedad. Por ejemplo, la distancia a un punto fijo del plano P = (a, b)es constante:
d((x, y), (a, b)) = r,
lo que se traduce en que:√(x− a)2 + (y − b)2 = r ⇒ (x− a)2 + (y − b)2 = r2
Entonces, (x−a)2+(y−b)2 = r2 es la representación analítica de la curva que cumple lapropiedad anterior. En este caso, se trata de la circunferencia de centro el punto P = (a, b)y radio r.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—15— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Análogamente, una superficie se puede definir como el lugar geométrico de los puntos delespacio que cumplen una determinada propiedad geométrica. Por ejemplo, la distancia aun punto fijo P = (a, b, c) es constante:
d((x, y, z), (a, b, c)) = r,
lo que se traduce en que:√(x− a)2 + (y − b)2 + (z − c)2 = r ⇒ (x− a)2 + (y − b)2 + (z − c)2 = r2
Entonces, (x−a)2+(y−b)2+(z−c)2 = r2 es la representación analítica de la superficieque cumple la propiedad anterior. En este caso, se trata de la esfera de centro el puntoP = (a, b, c) y radio r.
Se llama representación analítica de una curva o una superficie a la representaciónmediante ecuaciones referidas a una sistema coordenado. No siempre es fácil encontrar lospuntos del plano o del espacio que cumplen una determinada propiedad geométrica. Porello, describiremos las ecuaciones de las curvas y las superficies más usuales sin deducirlascomo lugares geométricos.
6.5.1. Curvas en el plano más notables
La ecuación de una curva en el plano depende de dos variables x, y, pero es un “objetogeométrico"que sólo tiene un grado de libertad. Puede ocurrir que venga descrita de variasformas:
a) de forma implícita: si aparece una expresión que relaciona x e y igualada a cero:f(x, y) = 0.
b) de forma explícita: si una de las variables x, y aparece despejada en función de laotra:
y = f(x) ó x = f(y)
c) de forma paramétrica: si x, y se escriben en función de una tercera variable:{x = x(t),y = y(t)
Las curvas más usuales en el plano son las llamadas cónicas o secciones cónicas, queson intersecciones de un doble cono recto con un plano (de ahí su nombre). Recordemosque un doble cono recto es la superficie que se genera al girar una recta (generatriz)alrededor de otra recta distinta con la que se corta (eje del cono). En general, se puedeconsiderar generatriz cualquier recta sobre el cono. El punto de intersección de ambasrectas se denomina vértice del cono.
Según sea la posición del plano de corte, se obtienen las siguientes secciones cónicas:
a) Si el plano es perpendicular al eje del cono y no pasa por el vértice se obtiene unacircunferencia. En el caso en que el plano pase por el vértice se obtiene un únicopunto.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—16— Curso 2013/14
Matemáticas Aplicadas a la Óptica Tema 6
–2–1
01
2
x
–2–1
01y
–2
–1
0
1
2
z
–2–1012x
–2 –1 0 1y
–2
–1
0
1
2
z
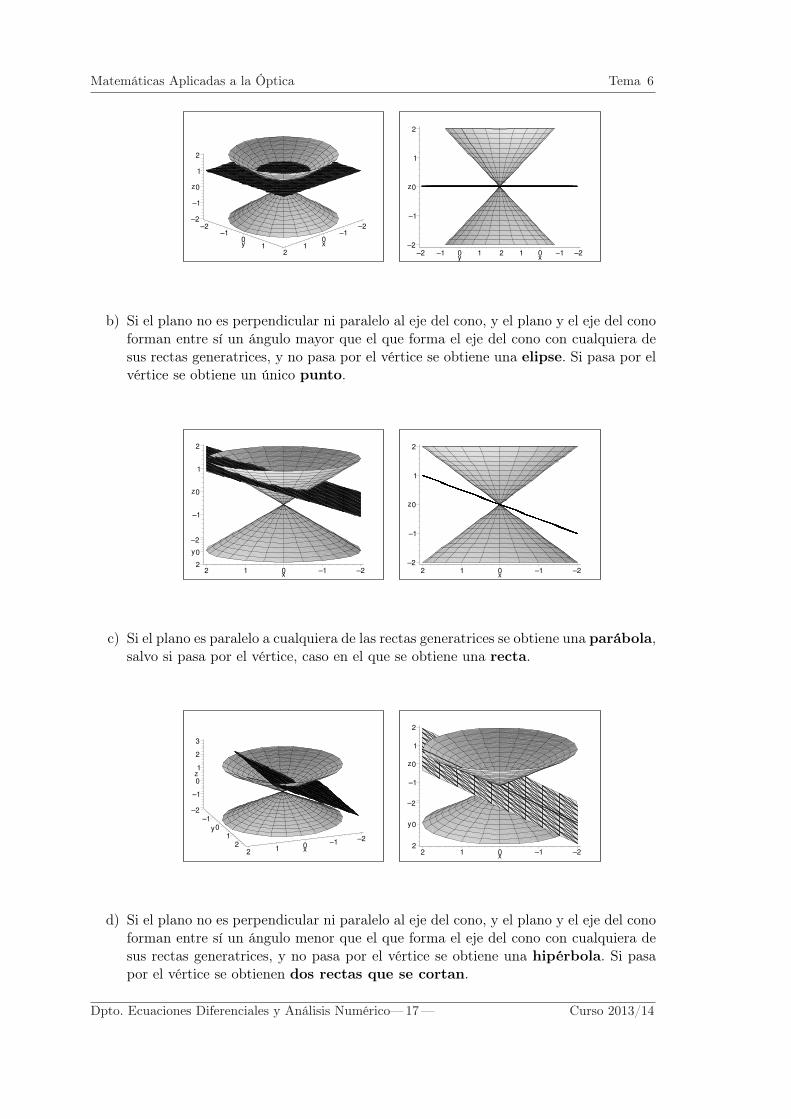
b) Si el plano no es perpendicular ni paralelo al eje del cono, y el plano y el eje del conoforman entre sí un ángulo mayor que el que forma el eje del cono con cualquiera desus rectas generatrices, y no pasa por el vértice se obtiene una elipse. Si pasa por elvértice se obtiene un único punto.
–2–1012x
–2
0
2
y
–1
0
1
2
z
–2–1012x
–2
–1
0
1
2
z
c) Si el plano es paralelo a cualquiera de las rectas generatrices se obtiene una parábola,salvo si pasa por el vértice, caso en el que se obtiene una recta.
–2–1012 x
–2
–1
0
1
2
y
–1
0
1
2
3
z
–2–1012x
–2
0
2
y
–1
0
1
2
z
d) Si el plano no es perpendicular ni paralelo al eje del cono, y el plano y el eje del conoforman entre sí un ángulo menor que el que forma el eje del cono con cualquiera desus rectas generatrices, y no pasa por el vértice se obtiene una hipérbola. Si pasapor el vértice se obtienen dos rectas que se cortan.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—17— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
–2–1012x
–2
0
2
y
–3
–2
–1
0
1
2
3
z
–2–1012x
–2
–1
0
1
2
y
–2
–1
0
1
2
z
La circunferencia, elipse, hipérbola y parábola son cónicas. Las rectas y puntos se conside-ran cónicas degeneradas.
En particular, las cónicas se corresponden con lugares geométricos de los puntos del plano(x, y) que satisfacen una ecuación completa de segundo grado. Las ecuaciones en formareducida y en coordenadas cartesianas de las cónicas son:
1. Recta: Tiene varias formas de expresión (ya vistas con anterioridad) a las que po-demos añadir:
x− x0x1 − x0
=y − y0y1 − y0
recta que pasa por los puntos (x0, y0) y (x1, y1)
y = y0 +m(x− x0) forma explícita en punto (x0, y0) y pendiente m
y en forma paramétrica con variable independiente t:{x = x0 + t(x1 − x0),y = y0 + t(y1 − y0)
2. Dos rectas
a) rectas secantes: su forma canónica esx2
a2− y
2
b2= 0, que representa a las rectas
x
a− y
b= 0 y
x
a+y
b= 0 que se cortan en el punto (0, 0).
b) rectas paralelas: su forma canónica es x2 = a2, que representa a las rectasx = a y x = −a que son dos rectas paralelas.
c) rectas coincidentes: su forma canónica es x2 = 0, que representa a la rectadoble x = 0.
3. Elipse: Es el lugar geométrico de los puntos del plano cuya distancia a dos puntosfijos llamados focos es constante. Sus formas canónicas representan la elipse de centro(0, 0), semiejes a y b (a > b) y focos F1 = (c, 0), F2 = (−c, 0) con c =
√a2 − b2,
cuyas ecuaciones son:
a) en implícitas:x2
a2+y2
b2= 1
b) en explícitas: y = ±b√a2 − x2a
c) en paramétricas:{x = a cos(θ),y = b sen(θ), θ ∈ [0, 2π)
Dpto. Ecuaciones Diferenciales y Análisis Numérico—18— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
En el caso particular en que ambos focos coinciden se obtiene la circunferencia:a = b = r.
–2
–1
1
2
–4 –2 2 4
4. Hipérbola: Es el lugar geométrico de los puntos del plano cuya diferencia entrelas distancias a dos puntos fijos llamados focos es constante. Sus formas canónicasrepresentan la hipérbola de centro (0, 0), eje focal OX, vértices (a, 0) y (−a, 0) yfocos F1 = (c, 0) y F2 = (−c, 0) con c =
√a2 + b2, cuyas ecuaciones son:
a) en implícitas:x2
a2− y2
b2= 1
b) en explícitas: y = ±b√x2 − a2a
c) en paramétricas:{x = a cosh(θ),
y = b sinh(θ), θ ∈ [0, 2π)ó
x =a
cos(θ),
y = b tan(θ), θ ∈ [0, 2π)
–2
–1
0
1
2
y
–1.4 –1 –0.6 0.20.40.60.8 1 1.21.4x
5. Parábola: Es el lugar geométrico de los puntos del plano cuya distancia a un puntofijo (llamado foco) y a una línea fija (llamado directriz) es igual. Sus formas canónicasrepresentan la parábola cuyo foco es F =
(p2, 0)y directriz x = −p
2, cuyas ecuaciones
son:
a) en implícitas: y2 = 2px
b) en explícitas: y = ±√
2px
c) en paramétricas: x =t2
2p,
y = t, t ∈ R
Dpto. Ecuaciones Diferenciales y Análisis Numérico—19— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
y
0.1 0.2 0.3 0.4 0.5x
6.5.2. Superficies en el espacio más notables
La ecuación de una superficie depende de tres variables x, y, z, pero es un “objeto geo-métrico"que sólo tiene dos grados de libertad. Puede ocurrir que venga descrita de variasformas:
a) de forma implícita: si aparece una expresión que relaciona x, y, z igualada a cero:F (x, y, z) = 0.
Ejemplo 6.5.1 La ecuación en forma implícita del elipsoide de centro (0, 0, 0) y
semiejes (a, b, c) esx2
a2+y2
b2+z2
c2= 1.
b) de forma explícita: si una de las variables x, y, z aparece despejada en función delas otras dos:
x = f(y, z), ó y = f(x, z) ó z = f(x, y)
Ejemplo 6.5.2 La ecuación en forma explícita del paraboloide elíptico en forma z =z(x, y) es:
z =x2
a2+y2
b2.
c) de forma paramétrica: si x, y, z se escriben en función de dos variables diferentes:x = x(u, v),y = y(u, v),z = z(u, v)
Las superficies que vienen descritas en forma implícita como una ecuación de segundo gradoreciben el nombre de cuádricas cuyas ecuaciones en forma reducida y en coordenadascartesianas describiremos a continuación. Para ello, estudiaremos además:
Intersección con los planos coordenados
Intersección con los planos paralelos a los planos coordenados
Simetría respecto a un plano cordenado
Tenemos la siguiente clasificación de cuádricas:
Dpto. Ecuaciones Diferenciales y Análisis Numérico—20— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
1. Elipsoide: Sabemos que la forma implícita del elipsoide es:
(x− x0)2
a2+
(y − y0)2
b2+
(z − z0)2
c2= 1.
Tomamos ρ = 1 e igualamos las coordenadas esféricas y la ecuación implícita de laforma:
(x− x0)a
= cos(ϕ) cos(θ)
(y − y0)b
= cos(ϕ) sin(θ)
(z − z0)c2
= sin(ϕ)
⇒
x = x0 + a cos(ϕ) cos(θ)y = y0 + b cos(ϕ) sin(θ)
z = z0 + c sin(ϕ), θ ∈ (0, 2π), ϕ ∈ (−π2,π
2)
obteniendo unas ecuaciones paramétricas (pueden existir otras diferentes).
–4
–2
0
2
4
–2
–1
0
1
2
–1
–0.5
0
0.5
1
Consideramos a partir de este momento que (x0, y0, z0) = (0, 0, 0).
a) Intersección con los planos coordenados:
x = 0: obtenemosy2
b2+z2
c2= 1 que es una elipse de centro (0, 0) y semiejes
b, c.
y = 0: obtenemosx2
a2+z2
c2= 1 que es una elipse de centro (0, 0) y semiejes
a, c.
z = 0: obtenemosx2
a2+y2
b2= 1 que es una elipse de centro (0, 0) y semiejes
a, b.b) Intersección con planos paralelos a los planos coordenados:
x = h: obtenemosy2
b2+z2
c2= 1 − h2
a2que es una elipse si 1 − h2
a2> 0. Si
h = ±a, entonces su ecuación se reduce ay2
b2+z2
c2= 0, cuya única solución
es y = 0, z = 0. Por tanto, el elipsoide tiene secciones elípticas en todos losplanos x = h para h ∈ (−a, a). Para h = ±a se reduce a un punto (±a, 0, 0).Para |h| > a no hay intersección entre el elipsoide y el plano x = h.
y = k: obtenemosx2
a2+z2
c2= 1 − k2
b2que es una elipse si 1 − k2
b2> 0. Si
k = ±b, entonces su ecuación se reduce ax2
a2+z2
c2= 0, cuya única solución
Dpto. Ecuaciones Diferenciales y Análisis Numérico—21— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
es x = 0, z = 0. Por tanto, el elipsoide tiene secciones elípticas en todos losplanos y = k para k ∈ (−b, b). Para k = ±b se reduce a un punto (0,±b, 0).Para |k| > b no hay intersección entre el elipsoide y el plano y = k.
z = l: obtenemosx2
a2+y2
b2= 1 − l2
c2que es una elipse si 1 − l2
c2> 0. Si
l = ±c, entonces su ecuación se reduce ax2
a2+y2
b2= 0, cuya única solución
es x = 0, y = 0. Por tanto, el elipsoide tiene secciones elípticas en todos losplanos z = l para l ∈ (−c, c). Para l = ±c se reduce a un punto (0, 0,±c).Para |l| > c no hay intersección entre el elipsoide y el plano z = l.
c) Simetrías: Es simétrica respecto a los tres planos coordenados.
2. Hiperboloide de una hoja o hiperboloide elíptico: Sabemos que la forma im-plícita del hiperboloide elíptico es:
(x− x0)2
a2+
(y − y0)2
b2− (z − z0)2
c2= 1.
En este caso simplemente exponemos cuáles podrían ser unas ecuaciones paramétricaspara esta superficie cuádrica:
x = x0 + a ch(ϕ) cos(θ)y = y0 + b ch(ϕ) sin(θ)z = z0 + c sh(ϕ),
donde ch(ϕ) designa el coseno hiperbólico de ϕ, y sh(ϕ) designa el seno hiperbólicode ϕ.
–1–0.5
00.5
1
–1–0.5
00.5
1
–1
–0.5
0
0.5
1
Consideramos a partir de este momento que (x0, y0, z0) = (0, 0, 0).
a) Intersección con los planos coordenados:
x = 0: obtenemosy2
b2− z2
c2= 1 que es una hipérbola de centro (0, 0) y eje
focal OY .
y = 0: obtenemosx2
a2− z2
c2= 1 que es una hipérbola de centro (0, 0) y eje
focal OX.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—22— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
z = 0: obtenemosx2
a2+y2
b2= 1 que es una elipse de centro (0, 0) y semiejes
a, b.
b) Intersección con planos paralelos a los planos coordenados:
x = h: obtenemosy2
b2− z2
c2= 1− h2
a2que es una hipérbola si 1− h2
a26= 0. Si
h = ±a, entonces su ecuación se reduce ay2
b2− z2
c2= 0, que son dos rectas
cy + bz = 0, cy − bz = 0 que a su vez son las asíntotas de las hipérbolasanteriores.
y = k: obtenemosx2
a2− z2
c2= 1− k2
b2que es una hipérbola si 1− k2
b26= 0. Si
k = ±b, entonces su ecuación se reduce ax2
a2− z2
c2= 0, que son dos rectas
cx+ az = 0, cx− az = 0 que son las asíntotas de las hipérbolas anteriores.
z = l: obtenemosx2
a2+y2
b2= 1 +
l2
c2que es una elipse para cualquier valor
de l.
c) Simetrías: Es simétrica respecto a los tres planos coordenados. El eje del hiper-boloide elíptico es el correspondiente a la variable que aparece en la ecuaciónimplícita con signo negativo, en este caso el eje OZ.
3. Hiperboloide de dos hojas o hiperboloide hiperbólico: Sabemos que la formaimplícita del hiperboloide hiperbólico es:
(x− x0)2
a2+
(y − y0)2
b2− (z − z0)2
c2= −1.
En este caso simplemente exponemos cuáles podrían ser unas ecuaciones paramétricaspara esta superficie cuádrica:
x = x0 + a sh(ϕ) cos(θ)y = y0 + b sh(ϕ) sin(θ)z = z0 + c ch(ϕ).
–2–1
01
2
–2–1
01
2
–3
–2
–1
0
1
2
3
Consideramos a partir de este momento que (x0, y0, z0) = (0, 0, 0).
Dpto. Ecuaciones Diferenciales y Análisis Numérico—23— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
a) Intersección con los planos coordenados:
x = 0: obtenemosy2
b2− z
2
c2= −1 que es una hipérbola de centro (0, 0) y eje
focal OZ.
y = 0: obtenemosx2
a2− z
2
c2= −1 que es una hipérbola de centro (0, 0) y eje
focal OZ.
z = 0: obtenemosx2
a2+y2
b2= −1 que no representa ninguna figura.
b) Intersección con planos paralelos a los planos coordenados:
x = h: obtenemos −y2
b2+z2
c2= 1 +
h2
a2que es una hipérbola de eje OZ.
y = k: obtenemos −x2
a2+z2
c2= 1 +
k2
b2que es una hipérbola de eje OZ.
z = l: obtenemosx2
a2+y2
b2= −1 +
l2
c2que es una elipse si −1 + l2
c2≥ 0, es
decir |l| ≥ c, y que no representa a ninguna figura si l ∈ (−c, c).
Se trata de una familia de hipérbolas que se apoyan en elipses, excepto en elintervalo z ∈ (−c, c), donde no hay superficie. Por eso, se llama de 2 hojas. Alaumentar el valor de l los semiejes de las elipses se van al infinito. Los planosz = ±c son planos tangentes a dicho hiperboloide hiperbólico.
c) Simetrías: Es simétrica respecto a los tres planos coordenados y respecto alorigen.
4. Paraboloide elíptico: Su ecuación implícita viene dada por la expresión:
(x− x0)2
a2+
(y − y0)2
b2= z − z0.
Podemos obtener sus ecuaciones paramétricas de dos formas distintas que exponemosa continuación:
parametrización 1 ≡
x− x0a
= u
y − y0b
= v
z − z0 = u2 + v2
⇒
x = x0 + a uy = y0 + b vz = z0 + u2 + v2
Y usando coordenadas polares, obtenemos:
parametrización 2 ≡
x− x0a
= ρ cos(θ)
y − y0b
= ρsin(θ)
z − z0 = ρ2
⇒
x = x0 + a ρ cos(θ)y = y0 + b ρ sin(θ)z = z0 + ρ2
Dpto. Ecuaciones Diferenciales y Análisis Numérico—24— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
0
0.2
0.4
0.6
0.8
1
Consideramos a partir de este momento que (x0, y0, z0) = (0, 0, 0).
a) Intersección con los planos coordenados:
x = 0: obtenemosy2
b2= z que es una parábola de eje OZ y vértice (0, 0).
y = 0: obtenemosx2
a2= z que es una parábola de eje OZ y vértice (0, 0).
z = 0: obtenemosx2
a2+y2
b2= 0 que es el origen de coordenadas (vértice del
paraboloide).
b) Intersección con planos paralelos a los planos coordenados:
x = h: obtenemosy2
b2= z − h2
a2que es una parábola de eje OZ y vértice(
h, 0,h2
a2
).
y = k: obtenemosx2
a2= z − k2
b2que es una parábola de eje OZ y vértice(
0, k,k2
b2
).
z = l: obtenemosx2
a2+y2
b2= l que es una elipse si l > 0, de centro (0, 0, l)
y ejes a√l, b√l.
Se trata de una familia de parábolas de vértice el origen que se apoyan en unafamilia de elipses o guía alrededor del eje OZ.
c) Simetrías: Es simétrica respecto a los planos OXZ y OY Z, pero el plano OXYno es plano de simetría.
5. Paraboloide hiperbólico o silla de montar: Partimos de su ecuación implícita:
x2
a2− y2
b2= z,
y la reescribimos de la forma: (xa
+y
b
)(xa− y
b
)= z.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—25— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Llamando 2u al primer paréntesis y 2v al segundo:
x
a+y
b= 2u
x
a− y
b= 2 v
⇒
x = a(u+ v)y = b(u− v)z = 4u v
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
Consideramos a partir de este momento que (x0, y0, z0) = (0, 0, 0).
a) Intersección con los planos coordenados:
x = 0: obtenemosy2
b2= −z que es una parábola de eje OZ (en la parte
negativa del eje) y vértice (0, 0).
y = 0: obtenemosx2
a2= z que es una parábola de eje OZ y vértice (0, 0).
z = 0: obtenemosx2
a2− y
2
b2= 0 que son dos rectas bx+ay = 0, bx−ay = 0,
que pasan por el origen de coordenadas.
b) Intersección con planos paralelos a los planos coordenados:
x = h: obtenemosy2
b2= −z +
h2
a2que es una parábola de eje OZ.
y = k: obtenemosx2
a2= z +
k2
b2que es una parábola de eje OZ.
z = l: obtenemosx2
a2− y2
b2= l que es una hipérbola cuyas asíntotas son las
rectas bx+ ay = 0, bx− ay = 0.
6. Cilindro: Se trata de una familia de rectas paralelas a una dirección fija (que vamos asuponer que es uno de los ejes coordenados) y que se apoya en una curva. Distinguimostres tipos de cilindros:
a) Cilindro elíptico (de eje OZ):x2
a2+y2
b2= 1
Dpto. Ecuaciones Diferenciales y Análisis Numérico—26— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
b) Cilindro parabólico (de eje OZ): y2 = b2x ó x2 = a2y
c) Cilindro hiperbólico (de eje OZ):x2
a2− y2
b2= 1
–1
–0.5
0
0.5
1
–1–0.5
00.5
1
–1
–0.5
0
0.5
1
Sus ecuaciones paramétricas podrían ser las de la cónica en la que se apoyan (escritaen coordenadas cartesianas (x, y) si son de eje OZ) y la otra variable inalterable(z = z en este caso).
7. Cono: Se trata de una familia de rectas que pasan por un punto y se apoyan en unacurva cerrada. Si consideramos que el punto es el (0, 0, 0) y que la curva está en elplano OXY y sólo puede ser una circunferencia o una elipse (debe ser cerrada). Eneste caso, el cono es de eje OZ y sus ecuaciones vienen dadas por:
a) Cono elíptico (de eje OZ):x2
a2+y2
b2=z2
c2
b) Cono circular (de eje OZ): x2 + y2 = r2z2.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—27— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
Sus ecuaciones paramétricas podrían ser las de la cónica en la que se apoyan (escritaen coordenadas cartesianas (x, y) si son de eje OZ) y la otra variable se obtendría apartir de la ecuación implícita del cono correspondiente.
6.6. Curvas sobre superficies
En el espacio hay algunas curvas características que se describen sobre una superficie, esdecir, son parte de dicha superficie. Dichas curvas son conocidas por el público en general,como por ejemplo las curvas coordenadas o las curvas de nivel. Estudiaremos las siguientescurvas sobre superficies:
1. Curvas coordenadas.
2. Curvas de nivel.
3. Curvas implícitas.
6.6.1. Curvas coordenadas
Son curvas cuya ecuación se obtiene fácilmente si la superficie sobre la que se encuentra vie-ne descrita en la forma paramétrica siguiente (una superficie tiene asociadas dos variablesindependientes)):
S ≡
x = x(u, v),y = y(u, v),z = z(u, v)
Dicha ecuación se obtiene considerando constante una de las dos variables independientesu, v, de manera que tenemos dos curvas distintas:
a) Si u = u0, entonces: x = x(u0, v) = x(v),y = y(u0, v) = y(v),z = z(u0, v) = z(v)
es una curva (una sola variable independiente v) sobre la superficie S, ya que verificala ecuación de S.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—28— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
b) Si v = v0, entonces: x = x(u, v0) = x(u),y = y(u, v0) = y(u),z = z(u, v0) = z(u)
es una curva (una sola variable independiente u) sobre la superficie S, ya que verificala ecuación de S.
La característica más importante de dichas curvas es que para u = u0 y v = v0 se obtiene:x = x(u0, v0),y = y(u0, v0),z = z(u0, v0)
es decir, el punto (x0, y0, z0) que pertenece a S. De ese modo, todos los puntos de lasuperficie S pueden identificarse como la intersección de dos curvas sobre la superficie. Lascurvas definen entonces un mallado sobre dicha superficie, de ahí que reciban el nombre decurvas coordenadas de la superficie.
Ejemplo 6.6.1 Los meridianos y paralelos sobre una esfera son las curvas coordenadasde dicha esfera.
–4
–2
0
2
4
–2
–1
0
1
2
–1
–0.5
0
0.5
1
6.6.2. Curvas de nivel
Son curvas cuya ecuación se obtiene fácilmente si la superficie sobre la que se encuentraviene descrita en la forma explícita:
S ≡ z = f(x, y).
Se llama curva de nivel de la superficie S a la curva que se obtiene al cortar la superficieS con un plano de tipo z = c. Observemos que las ecuaciones de una curva de nivel vienendadas por: {
z = f(x, y)z = c
}⇒ f(x, y) = c
Observemos que la expresión final f(x, y) = c es una ecuación con dos incógnitas, por tantohay una variable independiente, lo que coincide con las variables independientes que debetener una curva.A partir de las curvas de nivel es fácil visualizar una superficie, ya que esa es la idea quese utiliza a la hora de preparar mapas de contornos en los que las líneas representan loslugares con altitud constante.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—29— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Ejemplo 6.6.2 Las líneas de nivel del paraboloide elípticox2
a2+y2
b2= z son: x2
a2+y2
b2= z
z = c
⇒
x2
a2+y2
b2= c
z = c
⇒
x2
(a√c)2
+y2
(b√c)2
= 1
z = c
que se corresponde, si c > 0 con una familia de elipses cuyos semiejes aumentan con c.
–1
–0.5
0
0.5
1
–1
–0.5
0
0.5
1
0
0.2
0.4
0.6
0.8
1
Ejemplo 6.6.3 Las líneas de nivel del paraboloide hiperbólicox2
a2− y2
b2= z son: x2
a2− y2
b2= z
z = c
⇒
x2
a2− y2
b2= c
z = c
⇒
x2
(a√c)2− y2
(b√c)2
= 1
z = c
que se corresponde, si c 6= 0 con una familia de hipérbolas cuyos semiejes aumentan con c.
6.6.3. Curvas implícitas
Una curva viene dada en forma implícita cuando es la intersección de dos superficies ex-presadas en forma implícita: {
F (x, y, z) = 0G(x, y, z) = 0
Ejemplo 6.6.4 La curva intersección de la esfera x2 + y2 + z2 = 1 con el cilindro x2 +y2 − x = 0.
Para conocer la geometría de dicha curva (qué objeto es) es importante conocer sus pro-yecciones sobre los planos coordenados. Para ello usamos el siguiente procedimiento, cuyospasos son:
1. Calcular el cilindro proyectante: Consiste en transformar el sistema inicial{F (x, y, z) = 0G(x, y, z) = 0
en otro sistema equivalente en el que en una de las ecuaciones falta una de las tresvariables x, y, z. Dicha variable se corresponde al eje coordenado perpendicular alplano coordenado sobre el que se quiere hacer la proyección. Por ejemplo, si queremoshacer la proyección sobre el plano OXY la variable que debe eliminarse es la variablez. Para ello, se usa el método de sustitución, es decir, se despeja la variable en unade las dos ecuaciones y se sustituye en la otra ecuación.
Dpto. Ecuaciones Diferenciales y Análisis Numérico—30— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
a) Si proyectamos sobre OXY , eliminamos la variable z:
F (x, y, z) = 0G(x, y, z) = 0
}⇔
{F (x, y, z) = 0H(x, y) = 0
donde H(x, y) = 0 se llama cilindro proyectante.
b) Si proyectamos sobre OXZ, eliminamos la variable y:
F (x, y, z) = 0G(x, y, z) = 0
}⇔
{F (x, y, z) = 0H(x, z) = 0
donde H(x, z) = 0 se llama cilindro proyectante.
c) Si proyectamos sobre OY Z, eliminamos la variable x:
F (x, y, z) = 0G(x, y, z) = 0
}⇔
{F (x, y, z) = 0H(y, z) = 0
donde H(x, y) = 0 se llama cilindro proyectante.
2. Se hace cero la variable perpendicular al plano sobre el que queremos hacer la pro-yección. De ese modo, las ecuaciones impliícitas de la curva proyectada son:
a) Si proyectamos sobre OXY : {H(x, y) = 0z = 0
b) Si proyectamos sobre OXZ: {H(x, z) = 0y = 0
c) Si proyectamos sobre OY Z: {H(y, z) = 0x = 0
Ejercicio 6.6.5 Hallar las proyecciones sobre los ejes de la curva implícita x2 + y2 + z2 = 4
x2 +y2
2= 1
–2
–1
0
1
2
x
–3–2
–10
12
3
y
–2
–1
0
1
2
z
Dpto. Ecuaciones Diferenciales y Análisis Numérico—31— Curso 2013/14

Matemáticas Aplicadas a la Óptica Tema 6
Sol: Las proyecciones sobre cada plano coordenado son:
Sobre el plano OXY : x2 +y2
2= 1, x ∈ [−1, 1], y ∈ [−
√2,√
2]
z = 0
–1
–0.5
0
0.5
1
–1–0.5
00.5
1
–1
–0.5
0
0.5
1
Sobre el plano OXZ:z2
2− x2
2= 1, x ∈ [−1, 1], z ∈ [−
√3,√
3]
y = 0
–2
–1
0
1
2
x
–1
–0.50
0.51
y
–2
–1
0
1
2
z
Sobre el plano OY Z:y2
6+z2
3= 1, y ∈ [−
√2,√
2], z ∈ [−√
2,√
2]
x = 0
–2–1012 x
–2 –1 0 1y
–2
–1
0
1
2
z
Dpto. Ecuaciones Diferenciales y Análisis Numérico—32— Curso 2013/14