filtros adaptativos - · • identificación de sistemas • control adaptativo. predicción la...
TRANSCRIPT

FILTROS ADAPTATIVOS

Filtros adaptativos
Vamos a diseñar filtros suponiendo que conocemos larespuesta deseada. Usaremos las ideas de adaptaciónestudiadas en los primeros temas para producir de maneraautomática las condiciones buscadas sin necesidad decalcular la función de transferencia del filtro.
Construiremos filtros adaptativos que serán redes deneuronas lineales, con lo que podremos utilizar los resultadosde espacios vectoriales.
Estos filtros se podrán aplicar a predicción, modelización,identificación de sistemas, eliminación de eco, etc.

El combinador lineal adaptativo
El combinador lineal con D- 1 delays y un sumador tienecomo ecuación:
y su salida es una combinación lineal de las D- 1 entradasanteriores.
El diseño mediante especificaciones sólo es aplicablecuando la señal y el ruido están muy bien caracterizadas ysus espectros no se superponen. Muchas veces esto nosucede o bien la señal va cambiando con el tiempo. En estoscasos no es conveniente predefinir los coeficientes sinoadaptarlos a las circunstancias.
)()(0
inxwnyN
ii −=
=

El combinador lineal adaptativo
El combinador lineal adaptativo es un sistema lineal cuyospesos son adaptativos. Para ello se presenta la respuestadeseada y los pesos se modifican para alcanzar el mínimo deuna función de coste.
El diagrama coincide con el que utilizamos para laregresión lineal o para clasificación.

El combinador lineal adaptativo
Interpretaremos entonces la función como una regresiónlineal, sin término independiente, de la serie de entradas a laserie de salidas deseadas.
El orden del filtro dependerá del número de delays (de laanchura de la ventana en la serie temporal)

Pesos óptimos del filtro
El comienzo del estudio de teoría de filtros óptimos fuellevado a cabo por Wiener y Kolmogorov que resolvieron elproblema en tiempo continuo trabajando en espacios deHilbert (e.v. de dimensión infinita). Dada una señal x(t)contaminada por un ruido n(t) encontrar el mejor sistemalineal capaz de aproximar otra señal dada d(t). Ésta puede sercualquier señal, incluida x(t) adelantada τ segundos, en cuyocaso el sistema trabajará como filtro y predictor.
Nosotros estudiaremos sólo el caso discreto (en e.v. dedimensión finita).

Pesos óptimos del filtro
Consideraremos el error como:Definimos el error cuadrático como el valor esperado del
error al cuadrado:
Para minimizar J derivamos respecto a los pesos eigualamos a 0, obteniendo las ecuaciones de Wiener-Hopf
que en notación vectorial es p = R w* donde p = E[dn xn] y R = E[xn xn
T]
)()()(ε nyndn −=
{ })(ε21 2 nEJ =
0)()()()(1
0=��
�
� −−−−=∂∂ −
=
inxknxwndnxEwJ D
ii
k

Pesos óptimos del filtro
Esta definición utiliza el operador estadístico E (valoresperado) aunque en la práctica se utiliza en su lugar eloperador temporal A:
e incluso comunmente se sustituye el límite por unaventana de M datos con M > 10 D para que los resultadossean fiables. De esta manera quedará:
=∞→=
N
iNix
NlimA
1)(1
1,...0 )( )()(1
0−=+−+=
−
=
DkiknxindkpM
in

Pesos óptimos del filtroLa matriz de autocorrelación R será:
y cada una de las entradas de la matriz:
Se puede demostrar que con los pesos óptimos el errorcumple:
[ ]�
���
�
�
−−−
−==
)1,1(....)0,1(............
)1,0(....)0,0( xx
DDrDr
DrrAR
nn
nnTnn
1,...0 )( )(),( 2
1
0121 −=−−−−=
−
=
Dkiknxiknxkkr n
M
inn
[ ] 1,...0 )( )(ε −=− DiinxnE

Pesos óptimos del filtro
Se puede interpretar la salida del filtro como la proyec-ción ortogonal de la señal deseada en el espacio de entradas.

Pesos óptimos del filtroDe manera similar a como lo hicimos en el primer tema,
en lugar de calcular analíticamente los pesos óptimospodemos buscarlos de manera adaptativa.
El coste en el espacio de los pesos es un paraboloide deecuación:
y un procedimiento eficiente para encontrar el costemínimo es modificar los pesos proporcionalmente al opuestodel gradiente en cada punto
+=i
TTidJ wp - Rw x21)(
21 2
)(η)( w)1(w nJnn ∇−=+

Pesos óptimos del filtroEn lugar de estimar el gradiente mediante métodos
estadísticos se puede calcular el valor instantáneo de éste encada dato:
con lo que el algoritmo LMS de modificación de los pesosquedaría:
Hay algoritmos mejores para adaptar el combinador linealpero éste es ampliamente utilizado debido a su simplicidad yrobustez frente a su pequeña complejidad computacional.
)( x)(ε)(~ nnnJ =∇
)( x)(ε η)( w)1(w nnnn −=+

El filtro de Wiener como predictor
Una aplicación interesante es usar este filtro parapredecir la entrada después de un tiempo n0 i.e. en elinstante n+n0. En este caso el filtro calcula la mejoraproximación para un valor futuro de la serie temporalbasado en los datos pasados.
Como las señales temporales no cambian radicalmentede dato a dato, es posible extrapolar localmente cómo va aser la próxima señal a partir de las N anteriores.

El filtro de Wiener comoaproximador de funciones
Si suponemos que la señal deseada es una funcióndesconocida de la entrada, d(n)=f(x(n)), el filtro actúa comoaproximador lineal de la función f.
La diferencia con el caso estudiado es que en este casoutilizamos funciones temporales en lugar de datos estáticosy la aproximación tiene lugar en el espacio de señales deentrada.
El combinador lineal encuentra entonces la proyección dela señal deseada en el espacio de señales de entrada, ya quees combinación de la señal de entrada actual y lasanteriores.

Propiedades de la solución
De la misma manera que estudiamos en el tema 1, el pasoque garantiza la convergencia al valor óptimo es
ηmax < 2 / λmax
donde λmax es el autovalor mayor de R.
En la práctica elegiremos donde η0 se
toma en (0.01,0.1) dependiendo del problema y la traza de
R se aproxima por
)R(1ηη 0
tr+=
=−≈
N
iinxtr
0
2 )()R(

Propiedades de la soluciónCada peso converge al valor mínimo con una velocidad
que depende del inverso del autovalor respectivo. El tiempode búsqueda viene limitado por la adaptación del más lento.
Esto quiere decir que el paso máximo está limitado por elmayor autovalor y la velocidad de adaptación por el menor,por tanto la dispersión de los autovalores en la matriz decorrelación de las entradas define el comportamiento delalgoritmo.
La elección del paso es entonces un compromiso entre lavelocidad de adaptación y la precisión: para un desajuste deun 10% el algoritmo converge en un número de pasosaproximado de 10 veces el número de pesos. En muchas delas aplicaciones esta velocidad es suficiente para manejar ladinámica del sistema.

Diferencia entre los sistemasneuronales anteriores y los
adaptativos
• En los sistemas adaptativos, los pesos se actualizancontinuamente, mientras que en los otros sólo lo hacen paraun conjunto de entrenamiento, después de lo cual quedanfijos• Los sistemas adaptativos admiten los cambios en la señal,lo que no ocurre con los otros.• Olvidan los datos antiguos y pueden ser desviados de losparámetros óptimos si aparece ruido, mientras los otros secomportan como un sistema de memoria larga.

Diferencia entre los sistemasneuronales anteriores y los
adaptativos
Para conseguir un buen sistema se necesitan ambascaracterísticas, para ello se utiliza la información de estado.Ésta es estimada a partir de los datos y se comporta comomemoria de larga duración del sistema. Cuando el sistemano puede predecir la entrada, actualiza la salida a partir deestos datos.
Por desgracia no se dispone de un resultado similar parael modelo no lineal.

Aplicaciones del combinadorlineal adaptativo
Este sistema se puede utilizar para diferentes aplica-ciones como:
• Predicción• Modelización• Eliminación de interferencias.• Eliminación de eco.• Identificación de sistemas• Control adaptativo.

PredicciónLa señal deseada es la entrada instantes más adelante. En
el caso n0 = 1 el esquema sería
y H(z) ajustaría sus parámetros para minimizar el error.
Debemos suponer que la estructura de la serie temporalno cambia o en todo caso lo hace muy lentamente de modoque el sistema pueda adaptarse a los cambios.

ModelizaciónSupongamos un sistema desconocido M(z) que produce
la señal x(n) ante una entrada de ruido blanco.
Una vez minimizado el error, la salida de todo eldispositivo será de nuevo ruido blanco. El bloque D(z)actúa como inverso del sistema desconocido, por lo que lospolos de D serán los ceros de M y viceversa.
Este esquema produce buenos resultados cuando la serietemporal tiene un espectro con picos escarpados y vallesanchos.
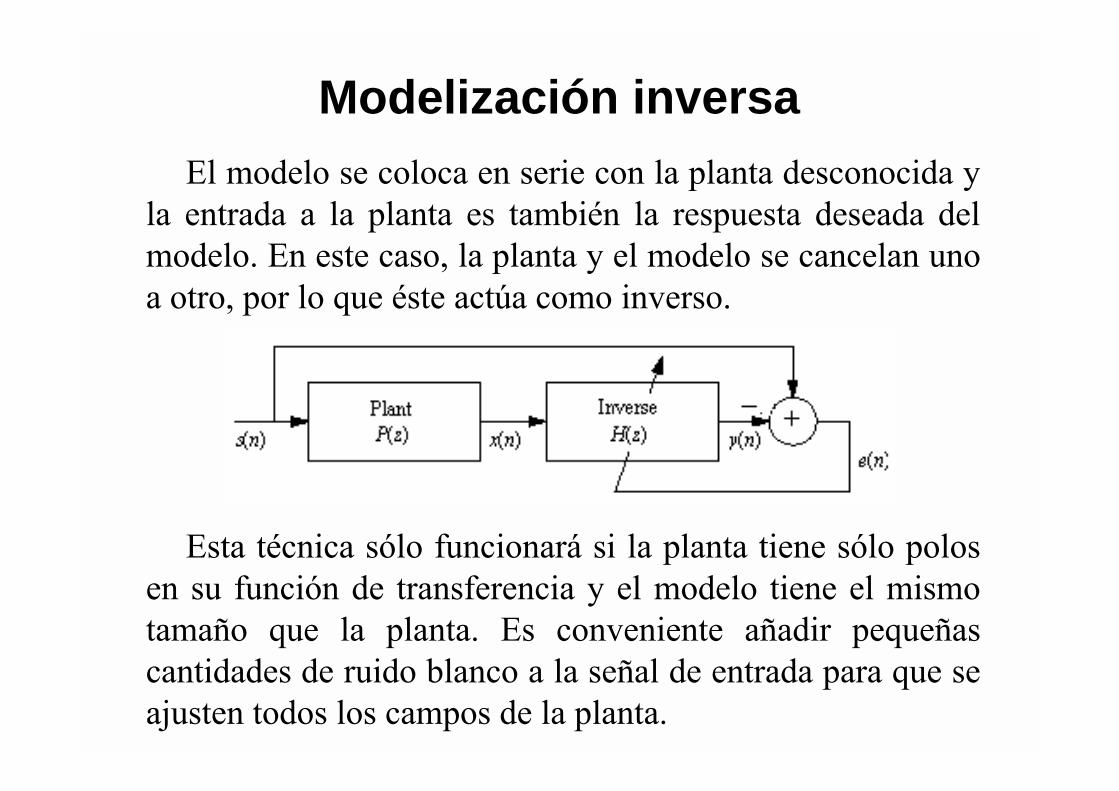
Modelización inversaEl modelo se coloca en serie con la planta desconocida y
la entrada a la planta es también la respuesta deseada delmodelo. En este caso, la planta y el modelo se cancelan unoa otro, por lo que éste actúa como inverso.
Esta técnica sólo funcionará si la planta tiene sólo polosen su función de transferencia y el modelo tiene el mismotamaño que la planta. Es conveniente añadir pequeñascantidades de ruido blanco a la señal de entrada para que seajusten todos los campos de la planta.

Eliminación de interferenciasEs muy interesante cuando la serie temporal está
perturbada por una interferencia de banda estrecha como laseñal de líneas eléctricas (50-Hz). La toma de datos enmedicina es muy sensible a esta interferencia ya que lasseñales biológicas son muy débiles y por el contrario elcuerpo actúa como antena de las interferencias.

Eliminación de interferencias
Otra aplicación interesante es la eliminación de ruidos enla voz en un entorno muy estridente como una fábrica unavión o lugares así. Se recoge la voz con ruido y se utilizacomo señal de entrada y además se recoge el ruido deambiente sólo.
En estos casos más generales el filtro ha de ser detamaño mayor, ya que el ruido no es una señal de bandaestrecha. Este método es eficaz cuando el ruido es regular ycontiene muchos armónicos como los producidos pormaquinaria que gira. En casos de ruido de banda ancha sólofunciona razonablemente en las frecuencias bajas.

Eliminación de ecoLos canales de teléfono, cuando las señales viajan de la
fuente al destino, son reflejados hacia la fuente. Este es eleco que podemos escuchar en algunas llamadas de largadistancia.
El culpable del problema es un transformador que recibeun impulso en doble hilo y produce una salida de cuatrohilos, y el ruido que se percibe es el que genera el máslejano.

Eliminación de eco
Para eliminarlo se coloca el filtro en paralelo con eltransmisor para eliminar el eco de la señal de entrada. Elfiltro colocado a la izquierda identifica el sistema formadopor los canales y el transmisor de B mejorando la señal quellega a A.

Eliminación de eco
Esto también es importante en la transmisión de datosvía modem. En este caso el problema reside en el ecogenerado por el primer transformador. El hecho es quecualquier modificación de la onda sonora que transporta losdatos puede ser interpretada como un símbolo equivocado.En la actualidad todos los modem de más de 48kb con-tienen un filtro adaptativo

Control inverso adaptativoEl método de control más utilizado es la retroalimen-
tación, pero no siempre es utilizable debido a restriccionesfísicas.
Construimos un controlador entre la entrada y la plantaque duplica el filtro de modelización inversa.
De esta manera la salida de la planta seguirá de cerca laentrada aplicada al controlador, que predistorsionamos laseñal exactamente lo que la planta necesita para seguir laseñal de entrada.