el presente dossier introduce al estudiante en la...
TRANSCRIPT

1
UNIVERSIDAD SALESIANADE BOLIVIA
CARRERA DE INGENIERIA DE SISTEMAS
DOSSIERSISTEMAS DIGITALES
Cuarto Semestre
Ing. Irina Kuskova
2012

INDICE
PRESENTACIÓN...........................................................................................................2
UNIDAD I: CONCEPTOS INTRODUCTORIOS.......................................................3
Dominio analógico y dominio digital
Sistemas y señales digitales y analógicos
Ventajas de los Circuitos Digitales
UNIDAD II: CONVERSIONES Y TRANSMISIONES............................................12
Conversión analógica digital. PCM
Transmisión paralela y serial
Controladores y drives de los puertos correspondientes.
Aplicaciones no estándares
UNIDAD III: CIRCUITOS ELECTRONICOS DIGITALES..................................17
Circuitos analógicos y digitales.
La familia TTL. Características
La familia CMOS. Características
UNIDAD IV: SISTEMAS NUMERICOS...................................................................26
Sistemas de numeracion
Conversión entre números de base diferente.
Códigos de detección y corrección de errores
UNIDAD V: ALGEBRA DE BOOLE Y COMPUERTAS LOGICAS....................37
Teoremas básicos y propiedades de álgebra de Boole.
Funciones booleanas
UNIDAD VI: LOGICA COMBINACIONAL............................................................44
Procedimiento de diseño.
Sumadores y sustractores.
Conversión entre códigos
UNIDAD VII: LOGICA COMBINACIONAL CON MSI Y LSI.............................51
Sumador paralelo binario.
Sumador decimal.
Comparador, decodificador, multiplexores.
Memorias de solo lectura ROM
2
Arreglo lógico programable PAL
UNIDAD VIII: LOGICA SECUENCIAL...................................................................53
Flip – flop.
Disparo de los flip – flops.
Análisis de circuitos secuenciales temporizados.
Reducción de estados y asignación.
Tabla de excitación.
Diseño de contadores.
UNIDAD IX: REGISTROS CONTADORES Y UNIDAD DE MEMORIA............56
Registros. Contadores. Secuencias de tiempo
Variedad de memorias RAM
BIBLIOGRAFÍA...........................................................................................................61
LECTURAS COMPLEMENTARIAS........................................................................62
GLOSARIO....................................................................................................................63
3

1. PRESENTACIÓN.-
El presente dossier introduce al estudiante en la materia Sistemas Digitales, sirve de apoyo y complemento a la bibliografía. A diferencia de los libros, el mencionado dossier, cuenta con datos actualizados y los temas son interpretados acorde a la clase. Si bien las referencias bibliográficas hacen referencia explícita a un determinado capítulo o tema, el dossier representa una lectura general de todo el curso.
4

2. UNIDAD I: CONCEPTOS INTRODUCTORIOS
Dominio analógico y dominio digital
.
El interés de las técnicas digitales reside, esencialmente, en rapidez de la manipulación, almacenamiento y tratamiento de la información digital.
5
La creciente actualidad de las técnicas digitales es un hecho incuestionable
No obstante, si se tiene en cuenta que nosotros los humanos somos “analógicos”, resulta evidente la necesidad de establecer de una u otra forma, la unión entre ambos mundos.
Podemos suponer que se trata de un robot que tiene que identificar un objeto; para ello dispone de un órgano de visión, por ejemplo una cámara. La magnitud física cuyas variaciones constituyen la información a tratar no es otra que la luz.
El circuito captador se encarga de transformar la cantidad de la luz instantánea en una señal eléctrica analógica que, una vez filtrada convenientemente, se transforma en un valor numérico. Un sistema de microprocesador (PC) se encarga de realizar el tratamiento de los resultados proporcionados por el convertidor A/D; como resultado de tratamiento puede ser necesario realizar un movimiento en un sentido u otro. El microprocesador (PC) aplica entonces valores digitales a los convertidores D/A, donde son transformados de nuevo en señales eléctricas analógicas o no que, convenientemente amplificadas, se encargan de mover un mecanismo motorizado (movimiento de un brazo, enfoque de un objetivo, dirección de la cámara).
Como ve en el proceso se han realizado dos conversiones del mundo analógico al mundo digital y viceversa.
6
El tratamiento de las señales digitales ofrece posibilidades casi ilimitadas, sin embargo, la mayor parte de las magnitudes que son procesados pertenecen al tipo de variación continua (analógicas): temperatura, presión, velocidad, luminosidad,

Sistemas y señales digitales y analógicas
7

Los circuitos electrónicos se pueden dividir en dos amplias categorías: digitales y analógicos. La electrónica digital utiliza magnitudes con valores discretos, mientras que la electrónica analógica emplea magnitudes con valores continuos.
Un sistema digital es cualquier dispositivo destinado a la generación, transmisión, procesamiento o almacenamiento de señales digitales. También un sistema digital es una combinación de dispositivos diseñado para manipular cantidades físicas o información que estén representadas en forma digital; es decir, que sólo puedan tomar valores discretos.
La mayoría de las veces estos dispositivos son electrónicos, pero también pueden ser mecánicos, magnéticos o neumáticos.
Para el análisis y la síntesis de sistemas digitales binarios se utiliza como herramienta el álgebra de Boole.
Los sistemas digitales pueden ser de dos tipos:
Sistemas digitales combinacionales: Son aquellos en los que la salida del sistema sólo depende de la entrada presente. Por lo tanto, no necesita módulos de memoria, ya que la salida no depende de entradas previas.
Sistemas digitales secuenciales: La salida depende de la entrada actual y de las entradas anteriores. Esta clase de sistemas necesitan elementos de memoria que recojan la información de la 'historia pasada' del sistema.
Para la implementación de los circuitos digitales, se utilizan puertas lógicas (AND, OR y NOT) y transistores. Estas puertas siguen el comportamiento de algunas funciones booleanas.Se dice que un sistema es analógico cuando las magnitudes de la señal se representan mediante variables continuas, esto es análogas a las magnitudes que dan lugar a la generación de esta señal. Un sistema analógico contiene dispositivos que manipulan cantidades físicas representadas en forma analógica. En un sistema de este tipo, las cantidades varían sobre un intervalo continuo de valores. Así, una magnitud analógica es aquella que toma valores continuos. Una magnitud digital es aquella que toma un conjunto de valores discretos. La mayoría de las cosas que se pueden medir cuantitativamente aparecen en la naturaleza en forma analógica. Un ejemplo de ello es la temperatura: a lo largo de un día la temperatura no varía entre, por ejemplo, 20 ºC o 25 ºC de forma instantánea, sino que alcanza todos los infinitos valores que entre ese intervalo. Otros ejemplos de magnitudes analógicas son el tiempo, la presión, la distancia, el sonido.
8
Señal AnalógicaUna señal analógica es un voltaje o corriente que varía suave y continuamente. Una onda senoidal es una señal analógica de una sola frecuencia. Los voltajes de la voz y del video son señales analógicas que varían de acuerdo con el sonido o variaciones de la luz que corresponden a la información que se está transmitiendo.
Señal DigitalLas señales digitales, en contraste con las señales analógicas, no varían en forma continua, sino que cambian en pasos o en incrementos discretos. La mayoría de las señales digitales utilizan códigos binarios o de dos estados.
Ventajas de los Circuitos DigitalesLa revolución electrónica ha estado vigente bastante tiempo; la revolución del "estado sólido" comenzó con dispositivos analógicos y aplicaciones como los transistores y los radios transistorizados. Cabe preguntarse ¿por qué ha surgido ahora una revolución digital?
De hecho, existen muchas razones para dar preferencia a los circuitos digitales sobre los circuitos analógicos:
Reproducibilidad de resultados. Dado el mismo conjunto de entradas (tanto en valor como en serie de tiempo), cualquier circuito digital que hubiera sido diseñado en la forma adecuada, siempre producirá exactamente los mismos resultados. Las salidas de un circuito analógico varían con la temperatura, el voltaje de la fuente de alimentación, la antigüedad de los componentes y otros factores.
Facilidad de diseño. El diseño digital, a menudo denominado "diseño lógico", es lógico. No se necesitan habilidades matemáticas especiales, y el comportamiento de los pequeños circuitos lógicos puede visualizarse mentalmente sin tener alguna idea especial acerca del funcionamiento de capacitores, transistores u otros dispositivos que requieren del cálculo para modelarse.
Flexibilidad y funcionalidad. Una vez que un problema se ha reducido a su forma digital, podrá resolverse utilizando un conjunto de pasos lógicos en el espacio y el tiempo. Por ejemplo, se puede diseñar un circuito digital que mezcle o codifique su voz grabada de manera que sea absolutamente indescifrable para cualquiera que no tenga su "clave" (contraseña), pero ésta podrá ser escuchada virtualmente sin distorsión por cualquier persona que posea la clave. Intente hacer lo mismo con un circuito analógico.
Programabilidad. Usted probablemente ya esté familiarizado con las computadoras digitales y la facilidad con la que se puede diseñar, escribir y depurar programas para las mismas. Pues bien, ¿adivine qué? Una gran parte del diseño digital se lleva a cabo en la actualidad al escribir programas,
9
también, en los lenguajes de descripción de lenguaje de descripción de Hardware (HDLs, por sus siglas en inglés), Estos lenguajes le permiten especificar o modelar tanto la estructura como la función de un circuito digital. Además de incluir un compilador, un HDL típico también tiene programas de simulación y síntesis. Estas herramientas de programación (software) se utilizan para verificar el comportamiento del modelo de hardware antes que sea construido, para posteriormente realizar la síntesis del modelo en un circuito, aplicando una tecnología de componente en particular.
Velocidad. Los dispositivos digitales de la actualidad son muy veloces. Los transistores individuales en los circuitos integrados más rápidos pueden conmutarse en menos de 10 picosegundos, un dispositivo completo y complejo construido a partir de estos transistores puede examinar sus entradas y producir una salida en menos de 2 nanosegundos. Esto significa que un dispositivo de esta naturaleza puede producir 500 millones o más resultados por segundo.
Economía. Los circuitos digitales pueden proporcionar mucha funcionalidad en un espacio pequeño. Los circuitos que se emplean de manera repetitiva pueden "integrarse" en un solo "chip" y fabricarse en masa a un costo muy bajo, haciendo posible la fabricación de productos desechables como son las calculadoras, relojes digitales y tarjetas musicales de felicitación. (Usted podría preguntarse, "¿acaso tales cosas son algo bueno?" ¡No importa!)
Avance tecnológico constante. Cuando se diseña un sistema digital, casi siempre se sabe que habrá una tecnología más rápida, más económica o en todo caso, una tecnología superior para el mismo caso poco tiempo. Los diseñadores inteligentes pueden adaptar estos avances futuros durante el diseño inicial de un sistema, para anticiparse a la obsolescencia del sistema y para ofrecer un valor agregado a los consumidores. Por ejemplo, las computadoras portátiles a menudo tienen ranuras de expansión para adaptar procesadores más rápidos o memorias más grandes que las que se encuentran disponibles en el momento de su presentación en el mercado.
De este modo, esto es suficiente para un matiz de mercadotecnia acerca del diseño digital.
Ventajas del procesado digital de señales frente al analógico
Existen muchas razones por las que el procesado digital de una señal analógica puede ser preferible al procesado de la señal directamente en el dominio analógico. Primero, un sistema digital programable permite flexibilidad a la hora de reconfigurar las operaciones de procesado digital de señales sin más que cambiar el programa. La reconfiguración de un sistema analógico implica habitualmente el rediseño del hardware, seguido de la comprobación y verificación para ver que opera correctamente.
10

También desempeña un papel importante al elegir el formato del procesador de señales la consideración de la precisión. Las tolerancias en los componentes de los circuitos analógicos hacen que para el diseñador del sistema sea extremadamente difícil controlar la precisión de un sistema de procesado analógico de señales.
En cambio, un sistema digital permite un mejor control de los requisitos de precisión. Tales requisitos, a su vez, resultan en la especificación de requisitos en la precisión del conversor A/D y del procesador digital de señales, en términos de longitud de palabra, aritmética de coma flotante frente a coma fija y factores similares.
Las señales digitales se almacenan fácilmente en soporte magnético (cinta o disco) sin deterioro o pérdida en la fidelidad de la señal, aparte de la introducida en la conversión A/D. Como consecuencia, las señales se hacen transportables y pueden procesarse en tiempo no real en un laboratorio remoto.
El método de procesado digital de señales también posibilita la implementación de algoritmos de procesado de señal más sofisticados. Generalmente es muy difícil realizar operaciones matemáticas precisas sobre señales en formato analógico, pero esas mismas operaciones pueden efectuarse de modo rutinario sobre un ordenador digital utilizando software.
En algunos casos, la implementación digital del sistema de procesado de señales es más barato que su equivalente analógica. El menor coste se debe a que el hardware digital es más barato o, quizás, es resultado de la flexibilidad ante modificaciones que permite la implementación digital.
Como consecuencia de estas ventajas, el procesado digital de señales se ha aplicado a sistemas prácticos que cubren un amplio rango de disciplinas.
Citamos, por ejemplo, la aplicación de técnicas de procesado digital de señales al procesado de voz y transmisión de señales en canales telefónicos, en procesado y transmisión de imágenes, en sismología y geofísica, en prospección petrolífera, en la detección de explosiones nucleares, en el procesado de señales recibidas del espacio exterior, y en una enorme variedad de aplicaciones.
Sin embargo, como ya se ha indicado, la implementación digital tiene sus limitaciones. Una limitación práctica es la velocidad de operación de los conversores A/D y de los procesadores digitales de señales. Veremos que las señales con anchos de banda extremadamente grandes precisan conversores A/D con una velocidad de muestreo alta y procesadores digitales de señales rápidos. Así, existen señales analógicas con grandes anchos de banda para las que la solución mediante procesado digital de señales se encuentra más allá del" estado del arte" del hardware digital.
11
Ejemplos de aquellos sistemas analógicos que ahora se han vuelto digitales.
Fotografías. La mayoría de las cámaras todavía hacen uso de películas que tienen un recubrimiento de haluros de plata para grabar imágenes. Sin embargo, el incremento en la densidad de los microcircuitos o "chips" de memoria digital ha permitido el desarrollo de cámaras digitales que graban una imagen como una matriz de 640 x 480, o incluso arreglos más extensos de pixeles donde cada pixel almacena las intensidades de sus componentes de color rojo, verde y azul de 8 bits cada uno.
Esta gran cantidad de datos, alrededor de siete millones de bits en este ejemplo puede ser procesada y comprimida en un formato denominado JPEG y reducirse a un tamaño tan pequeño como el equivalente al 5% del tamaño original de almacenamiento dependiendo de la cantidad de detalle de la imagen. De este modo las cámaras digitales dependen tanto del almacenamiento como del procesamiento digital.
Grabaciones de video. Un disco versátil digital de múltiples usos (DVD por las siglas de digital versatile disc) almacena video en un formato digital altamente comprimido denominado MPEG-2. Este estándar codifica una pequeña fracción de los cuadros individuales de video en un formato comprimido semejante al JPEG y codifica cada uno de los otros cuadros como la diferencia entre éste y el anterior.
La capacidad de un DVD de una sola capa y un solo lado es de aproximadamente 35 mil millones de bits suficiente para grabar casi 2 horas de video de alta calidad y un disco de doble capa y doble lado tiene cuatro veces esta capacidad.
Grabaciones de audio. Alguna vez se fabricaron exclusivamente mediante la impresión de formas de onda analógicas sobre cinta magnética o un acetato (LP), las grabaciones de audio utilizan en la actualidad de manera ordinaria discos compactos digitales (CD. Compact Discs). Un CD almacena la música como una serie de números de 16 bits que corresponden a muestras de la forma de onda analógica original se realiza una muestra por canal estereofónico cada 22.7 microsegundos. Una grabación en CD a toda su capacidad (73 minutos) contiene hasta seis mil millones de bits de información.
Carburadores de automóviles. Alguna vez controlados estrictamente por conexiones mecánicas (incluyendo dispositivos mecánicos "analógicos" inteligentes que monitorean la temperatura, presión. etc.), en la actualidad los motores de los automóviles están controlados por microprocesadores integrados.
Diversos sensores electrónicos y electromecánicos convierten las condiciones de la máquina en números que el microprocesador puede examinar para determinar cómo controlar el flujo de gasolina y oxígeno hacia el motor. La salida del microprocesador es una serie de números variante en el tiempo que activa a transductores electromecánicos que a su vez controlan la máquina.
El sistema telefónico. Comenzó hace un siglo con micrófonos y receptores analógicos que se conectaban en los extremos de un par de alambres de cobre (o,
12

¿era una cuerda?). Incluso en la actualidad en la mayor parte de los hogares todavía se emplean teléfonos analógicos los cuales transmiten señales analógicas hacia la oficina central (CO) de la compañía telefónica. No obstante en la mayoría de las oficinas centrales estas señales analógicas se convierten a un formato digital antes que sean enviadas a sus destinos, ya sea que se encuentren en la misma oficina central o en cualquier punto del planeta.
Durante muchos años los sistemas telefónicos de conmutación privados (PBX. private branch exchanges) que se utilizan en los negocios han transportado el formato digital todo el camino hacia los escritorios. En la actualidad muchos negocios, oficinas centrales y los proveedores tradicionales de servicios telefónicos están cambiando a sistemas integrados que combinan la voz digital con el tráfico digital de datos sobre una sola red de Protocolo de Internet IP (por las siglas en inglés de Protocolo de Internet).
Semáforos. Para controlar los semáforos se utilizaban temporizadores electromecánicos que habilitaban la luz verde para cada una de las direcciones de circulación durante un intervalo predeterminado de tiempo. Posteriormente se utilizaron relevadores en módulos controladores que podían activar los semáforos de acuerdo con el patrón del tráfico detectado mediante sensores que se incrustan en el pavimento.
Los controladores de hoy en día hacen uso de microprocesadores y pueden controlar los semáforos de modo que maximicen el flujo vehicular, o como sucede en algunas ciudades de California, sean un motivo de frustración para los automovilistas en un sinnúmero de creativas maneras.
Efectos cinematográficos. Los efectos especiales creados exclusivamente para ser utilizados con modelos miniaturizados de arcilla, escenas de acción, trucos de fotografía y numerosos traslapes de película cuadro por cuadro.
En la actualidad naves espaciales, insectos, otras escenas mundanas e incluso bebés (en la producción animada de Pixar, Tin Toy) se sintetizan por completo haciendo uso de computadoras digitales. ¿Podrán algún día ya no ser necesarios ni los dobles cinematográficos femeninos o masculinos?
13

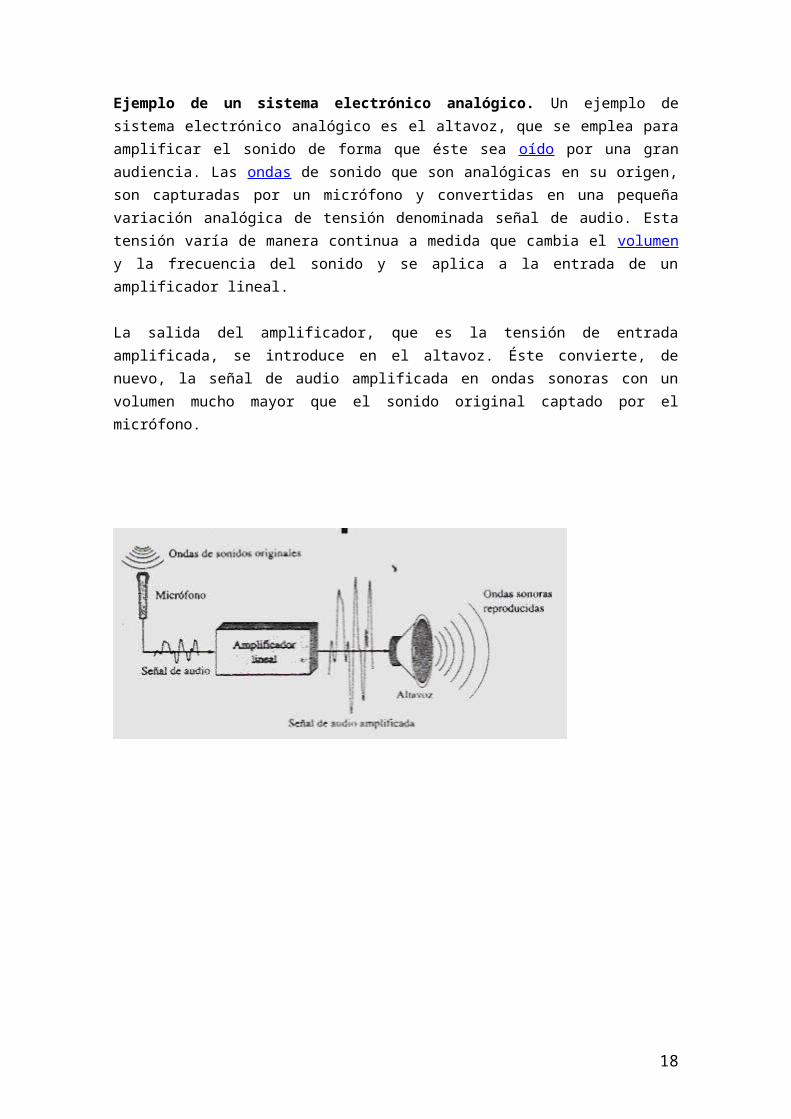
Ejemplo de un sistema electrónico analógico. Un ejemplo de sistema electrónico analógico es el altavoz, que se emplea para amplificar el sonido de forma que éste sea oído por una gran audiencia. Las ondas de sonido que son analógicas en su origen, son capturadas por un micrófono y convertidas en una pequeña variación analógica de tensión denominada señal de audio. Esta tensión varía de manera continua a medida que cambia el volumen y la frecuencia del sonido y se aplica a la entrada de un amplificador lineal.
La salida del amplificador, que es la tensión de entrada amplificada, se introduce en el altavoz. Éste convierte, de nuevo, la señal de audio amplificada en ondas sonoras con un volumen mucho mayor que el sonido original captado por el micrófono.
14
Sistemas que utilizan métodos digitales y analógicos
Existen sistemas que utilizan métodos digitales y analógicos, uno de ellos es el reproductor de disco compacto (CD). La música en forma digital se almacena en el CD. Un sistema óptico de diodos láser lee los datos digitales del disco cuando éste gira y los transfiere al convertidor digital-analógico (DAC, digital-to-analog converter). El DAC transforma los datos digitales en una señal analógica que es la reproducción eléctrica de la música original. Esta señal se amplifica y se envía al altavoz. Cuando la música se grabó en el CD se utilizó un proceso que, esencialmente, era el inverso al descrito, y que utiliza un convertidor analógico digital (ADC, analog-to-digital converter).
15
3. UNIDAD II: CONVERSIONES Y TRANSMISIONES
Modulación PCM
La amplia naturaleza de las señales analógicas es evidente, cualquier forma de onda está disponible con toda seguridad en el ámbito analógico, nos encontramos con una onda original y una distorsión de la que tenemos que identificar la onda original de la distorsionada. Aquí surge la necesidad del audio digital ya que nos permite separar de la señal original el ruido y la distorsión. La calidad de una señal de audio no es función del mecanismo de lectura, sino que parámetros tales como respuesta en frecuencia, linealidad y ruido son sólo funciones del conversor digital - analógico empleado.
En el proceso de conversión de la forma análoga a la forma digital y viceversa aparecen tres términos matemáticos o lógicos básicos: el muestreo, la cuantificación y la codificación. El muestreo es el proceso de tomar medidas instantáneas de una señal análoga cambiante en el tiempo, tal como la amplitud de una forma de onda compleja. La información muestreada permite reconstituir más o menos una representación de la forma de onda original. Sin embargo, si las muestras son relativamente escasas (o infrecuentes), la información entre las muestras se perderá.
El teorema de muestreo o Teorema de Kotelnikov establece que es posible capturar toda la información de la forma de onda si se utiliza una frecuencia de muestreo del doble de la frecuencia más elevada contenida en la forma de onda.
En los sistemas telefónicos la velocidad de muestreo ha sido establecida a 8000 muestras por segundo. Una vez que la muestra y su valor ha sido obtenido, la cuantización es el siguiente proceso para la reducción de la señal análoga compleja; éste permite aproximar la muestra a uno de los niveles de una escala designada. Por ejemplo, tomando una escala cuyos valores máximos y mínimo son quince y cero, respectivamente, y el rango está dividido en 16 niveles, las muestras tendrán que ser aproximadas a uno de estos niveles.
Hay que notar que el proceso de cuantización puede introducir un ruido de cuantización; una diferencia entre el valor original de la amplitud muestreada y el valor aproximado correspondiente a la escala seleccionada, donde la magnitud de este error estará determinada por la fineza de la escala empleada.
Dentro de las distintas técnicas de conversión de señales, el sobremuestreo (oversampling) aparece se ha hecho popular en los últimos años debido a que evita muchos de los inconvenientes encontrados en los métodos convencionales de conversión digital - analógica (en adelante DAC) y analógica - digital (en adelante ADC), especialmente en aquellas aplicaciones que requieren alta resolución de representación a baja frecuencia de las señales.
Los convertidores convencionales tienen dificultades a la hora de ser implementados en tecnología VLSI (Very Large Scale Integration). Estas dificultades son debidas a que los métodos convencionales precisan componentes analógicos e sus filtros y
16
circuitos de conversión que pueden ser muy vulnerables al ruido y a las interferencias, sin embargo estos métodos precisan una velocidad de muestreo mucho menor, la frecuencia de Kotelnikovt de la señal.
PCM, Modulación por Codificación de Pulsos
Se basa como la anterior en el teorema de muestreo: " Si una señal f(t) se muestrea a intervalos regulares de tiempo con una frecuencia mayor que el doble de la frecuencia significativa más alta de la señal, entonces las muestras así obtenidas contienen toda la información de la señal original. La función f(t) se puede reconstruir a partir de estas muestras mediante la utilización de un filtro paso - bajo".
Es decir, se debe muestrear la señal original con el doble de frecuencia que ella, y con los valores obtenidos, normalizándolos a un número de bits dado (por ejemplo, con 8 bits habría que distinguir entre 256 posibles valores de amplitud de la señal original a cuantificar) se ha podido codificar dicha señal.
En el receptor, este proceso se invierte, pero por supuesto se ha perdido algo de información al codificar, por lo que la señal obtenida no es exactamente igual que la original (se le ha introducido ruido de cuantización). Hay técnicas no lineales en las que es posible reducir el ruido de cuantización muestreando a intervalos no siempre iguales.
Proceso modulación PCM
Codificación Analógica-Digital Modulación de Amplitud de Pulso(PAM)
Modulación PCM
Tasa de prueba
Codificación Analógica - Digital
Este tipo de codificación es la representación de información analógica en una señal digital. Por ejemplo para grabar la voz de un cantante sobre un CD se usan se usan significados digitales para grabar la información analógica. Para hacerlos, se debe de reducir el nº infinito potencial posible de valores en un mensaje analógico de modo que puedan ser representados como una cadena digital con un mínimo de información posible. La figura 1 nos muestra la codificación analógica - digital llamada codec (codificador-decodificador). Figura 1 Codificación analógica - digital
17
En la codificación analógica - digital, estamos representando la información contenida a partir de una serie de pulsos digitales (1s ó 0s).La estructura de la señal traducida no es el problema. En su lugar el problema es como hacer pasar información de un número de valores infinitos a un número de valores limitados sin sacrificar la calidad.
Modulación de amplitud de pulso (PAM)
El primer paso en la codificación analógica - digital se llama PAM. Esta técnica recoge información análoga, la muestra (ó la prueba), y genera una serie de pulsos basados en los resultados de la prueba. El término prueba se refiere a la medida de la amplitud de la señal a intervalos iguales.
El método de prueba usado en PAM es más eficaz en otras áreas de ingeniería que en la comunicación de datos (informática). Aunque PAM está en la base de un importante método de codificación analógica - digital llamado modulación de código de pulso (PCM).
En PAM, la señal original se muestra a intervalos iguales como lo muestra la figura 2. PAM usa una técnica llamada probada y tomada. En un momento dado el nivel de la señal es leído y retenido brevemente. El valor mostrado sucede solamente de modo instantáneo a la forma actual de la onda, pero es generalizada por un periodo todavía corto pero medible en el resultado de PAM Figura 2 PAM
El motivo por el que PAM sea ineficaz en comunicaciones es por que aunque traduzca la forma actual de la onda a una serie de pulsos, siguen teniendo amplitud (pulsos)(todavía señal analógica y no digital). Para hacerlos digitales, se deben de modificar usando modulación de código de pulso (PCM)
Modulación PCM
PCM modifica los pulsos creados por PAM para crear una señal completamente digital. Para hacerlo, PCM, en primer lugar, cuantifica los pulsos de PAM. La cuantificación es un método de asignación de los valores íntegros a un rango específico para mostrar los ejemplos.
18

Los resultados de la cuantificación están representados en la figura 3.
Figura 3 Señal PAM cuantificada
La figura4 muestra un método simple de asignación de signo y magnitud de los valores para muestras cuantificadas. Cada valor es traducido en su equivalente binario 7-bits. El octavo bit indica el signo. Figura 4 Cuantificación usando signo y magnitud
Los dígitos binarios son transformados en un señal digital usando una de las técnicas de código digital-digital. La figura 5 muestra el resultado de la modulación de coraje de pulso de la señal original codificada finalmente en señal unipolar. Solo se muestran los 3 primeros valores de prueba.
Figura 5 PCM
PCM se construye actualmente a través de 4 procesos separados: PAM, cuantificación, código digital-digital. La figura 6 muestra el proceso entero en forma de gráfico. PCM es el método de prueba usado para digitalizar la voz en la transmisión de línea-T en los sistemas de telecomunicaciones en América del Norte.
19

Figura 6 De señal analógica a código digital PCM
Tasa de Prueba. Como se puede ver a partir de las figuras anteriores, la exactitud de la reproducción digital de una señal analógica depende del número de pruebas tomadas. Usando PAM y PCM se puede reproducir una onda con exactitud si se toman una infinidad de pruebas, o se puede reproducir de forma más generalizada si se tomas 3 pruebas. La cuestión es: ¿cuántas muestras son suficientes? Actualmente, se requiere poca información para la reconstrucción de señal analógica. En lo referente al Teorema de Kotelnikov, para asegurarse que la reproducción exacta de una señal analógica original usando PAM, la tasa de prueba debe ser al menos el doble de la frecuencia máxima de la señal original.
De este modo, si deseamos hacer muestra con la información de voz de un teléfono que tiene como frecuencia máxima 3300 HZ, la tasa de muestra debe ser de 6600 pruebas / s. En la práctica, actualmente se toman 8000 muestras para compensar las imperfecciones del proceso.
20

Términos importantes
PCM (PULSE CODE MODULATION) Modulación por código de impulsos.- Es un proceso digital de modulación para convertir una señal analógica en un código digital. La señal analógica se muestrea, es decir, se mide periódicamente. En un convertidor analógico / digital, los valores medidos se cuantifican, se convierten en un número binario y se descodifican en un tren de impulsos. Este tren de impulsos es una señal de alta frecuencia portadora de la señal analógica original.
PCM BINARY CODE Código binario PCM.- Un código de impulsos en el que los valores cuantificados son identificados por números tomados en orden. Este término no debe emplearse para transmisión por líneas.
PCM MULTIPLEX EQUIPMENT Equipo múltiplex PCM.- Un equipo para derivar una señal digital simple, a una velocidad de dígitos definida, de dos o más canales analógicos mediante una combinación de modulación por código de impulsos y un multiplexado por división de tiempo (multiplexor) y también para realizar la función inversa (demultiplexor). La descripción debe ir seguida de una velocidad de dígitos binarios equivalente; p. Ej., equipo múltiplex PCM de 2.048 kbit/s.
Conclusión
En esta investigación logramos observar que PCM no es mas que un proceso digital de modulación para convertir una señal analógica en un código digital. En el cual la señal analógica se muestrea, es decir, se mide periódicamente. En un convertidor analógico / digital, los valores medidos se cuantifican, se convierten en un número binario y se descodifican en un tren de impulsos. Este tren de impulsos es una señal de alta frecuencia portadora de la señal analógica original.
21

Aplicaciones no estándares, realizadas por: Ing. Irina Kuskova
1. La configuración típica del controlador de puerto paralelo Intel 8255, PPI utilizada en las computadoras IBM compatibles deja sin el uso 7 pines del conector DB25 vinculado con este puerto. He aquí una aplicación en la cual se logró el uso más optimo de dicho contolador dejando sin uso solo un pin como se puede ver en la siguiente figura.
2. Otro uso no estándar corresponde a los drives de puertos seriales MC1488 y MC1489, donde se utilizaba su propiedad de convertir las señales de RS–232 a nivel TTL y viceversa para realizar una función lógica.
22

UNIDAD III: CIRCUITOS ELECTRONICOS DIGITALES
Sistemas electrónicos
La forma de entender los sistemas electrónicos consiste en dividirlos en las siguientes partes: Entradas o Inputs – Sensores (o transductores) electrónicos o mecánicos que toman las señales (en forma de temperatura, presión, etc.) del mundo físico y las convierten en señales de corriente o voltaje.
Circuitos de procesado de señales – Consisten en componentes electrónicos conectados juntos para manipular, interpretar y transformar las señales.
Salidas u Outputs – Actuadores u otros dispositivos (también transductores) que convierten las señales de corriente o voltaje en señales físicamente útiles.
Como ejemplo supongamos un televisor. Su entrada es una señal de difusión recibida por una antena o por un cable. Los circuitos de procesado de señales del interior del televisor extraen la información sobre el brillo, el color y el sonido de esta señal. Los dispositivos de salida son un tubo de rayos catódicos que convierte las señales electrónicas en imágenes visibles en una pantalla y unos altavoces.
Circuitos analógicos
Muchas de las aplicaciones electrónicas analógicas, como los receptores de radio, se fabrican como un conjunto de unos cuantos circuitos más simples:
Multiplicador analógico Amplificador electrónico Filtro analógico Oscilador electrónico Lazo de seguimiento de fase Mezclador electrónico Conversor de potencia Fuente de alimentación Adaptador de impedancia Amplificador operacional Comparador
Circuitos digitales
Los ordenadores, los relojes electrónicos y los controladores lógicos programables (usados para controlar procesos industriales) se fabrican con circuitos digitales. Los procesadores de señales digitales son otro ejemplo.
Bloques:
Puerta lógica
23

Biestable
Contador
Registro
Multiplexador
Disparador Schmitt
Dispositivos integrados:
Microprocesador Microcontrolador DSP FPGA
Circuitos de señal mixta
Los circuitos de señal mixta, también conocidos como circuitos híbridos, se están haciendo cada vez más comunes. Estos circuitos contienen componentes analógicos y digitales. Los conversores analógico-digital y los conversores digital-analógico son los principales ejemplos. Otros son las puertas de transmisión y los buffers.
Familia lógica TTL
Las características de la tecnología utilizada, en la familia TTL (Transistor, Transistor Logic), condiciona los parámetros que se describen en sus hojas de características según el fabricante, (aunque es estándar), la resumiré en sólo algunas como que:
Su tensión de alimentación característica se halla comprendida entre los 4'75V y los 5'25V como se ve un rango muy estrecho debido a esto, los niveles lógicos vienen definidos por el rango de tensión comprendida entre 0'2V y 0'8V para el estado L y los 2'4V y Vcc para el estado H.
La velocidad de transmisión entre los estados lógicos es su mejor baza, ciertamente esta característica le hacer aumentar su consumo siendo su mayor enemigo. Motivo por el cual han aparecido diferentes versiones de TTL como FAST, SL, S, etc y últimamente los TTL: HC, HCT y HCTLS. En algunos casos puede alcanzar poco mas de los 250Mhz.
Esta familia es la primera que surge y aún todavía se utiliza en aplicaciones que requieren dispositivos SSI y MSI. El circuito lógico TTL básico es la compuerta NAND. La familia TTL utiliza como componente principal el transistor bipolar. Como podemos ver en la figura, mediante un arreglo de estos transistores se logran crear distintos circuitos de lógica digital.
Otras características TTL.
24

Debemos tomar en cuenta otras características de la lógica TTL. Si dejamos una entrada sin conectar actuará exactamente como un 1 lógico aplicado a esa entrada, ya que el transistor no será polarizado en forma directa. Cuando se presenta el caso de que no utilizamos una entrada la podemos dejar desconectada para que actué como un 1 lógico, pero lo más conveniente sería conectarlas a +5V a través de una resistencia de 1k_ para proteger de las corrientes a las entradas de la compuerta.
Cuando dos o más entradas de una compuerta TTL se interconectan para formar una entrada común, esta tendrá una factor de carga de entrada que es la suma de los factores de carga de cada entrada.
Características de la familia TTL.
La familia lógica transistor-transistor ha sido una de las familias de CI más utilizadas.
Los CI de la serie 74 estándar ofrecen una combinación de velocidad y disipación de potencia adecuada a muchas aplicaciones. Los CI de esta serie incluyen una amplia variedad de compuertas, flip-flops y multivibradores monoestables así como registros de corrimiento, contadores, decodificadores, memorias y circuitos aritméticos.
La familia 74 cuenta con varias series de dispositivos lógicos TTL(74, 74LS, 74S, etc.).
Características de la serie TTL estándar
Rango de voltajes de alimentación y temperatura.
Estas series utilizan una fuente de alimentación (Vcc) con voltaje nominal de 5V. Funcionan de manera adecuada en temperaturas ambientales que van de 0° a 70°C.
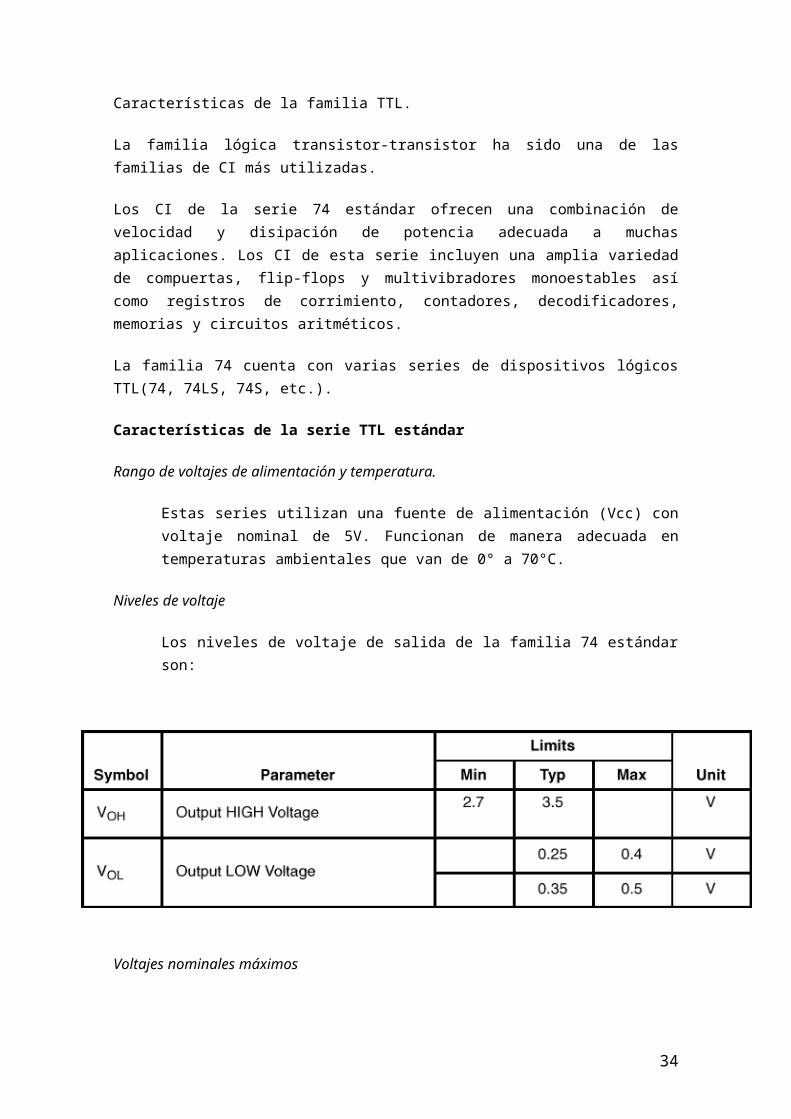
Niveles de voltaje
Los niveles de voltaje de salida de la familia 74 estándar son:
Voltajes nominales máximos
25

Los voltajes aplicados a cualquier entrada de un CI no deben exceder los 5.5V. Existe también un máximo para el voltaje negativo que se puede aplicar a una entrada TTL, que es de -0.5V. Esto se debe al uso de diodos de protección en paralelo en cada entrada de los CI TTL.
Retado de propagación
La compuerta NAND TTL estándar tiene retardos de propagación característicos de tPLH = 11 ns y tPHL = 7 ns, con lo que el retardo promedio es de tPD(prom) = 9 ns.
Dentro de la familia TTL, existen otras series que ofrecen alternativas de características de velocidad y potencia. Dentro de ellas, están:
• Serie 74L, TTL de bajo consumo de potencia
• Serie 74H, TTL de alta velocidad
• Serie 74S, TTL Schottky
• Serie 74LS (LS-TTL), TTL Schottky de bajo consumo de potencia
• Serie 74AS (AS-TTL), TTL Schottky avanzada
• Serie 74ALS, TTL avanzada Schottky de bajo consumo de potencia
26

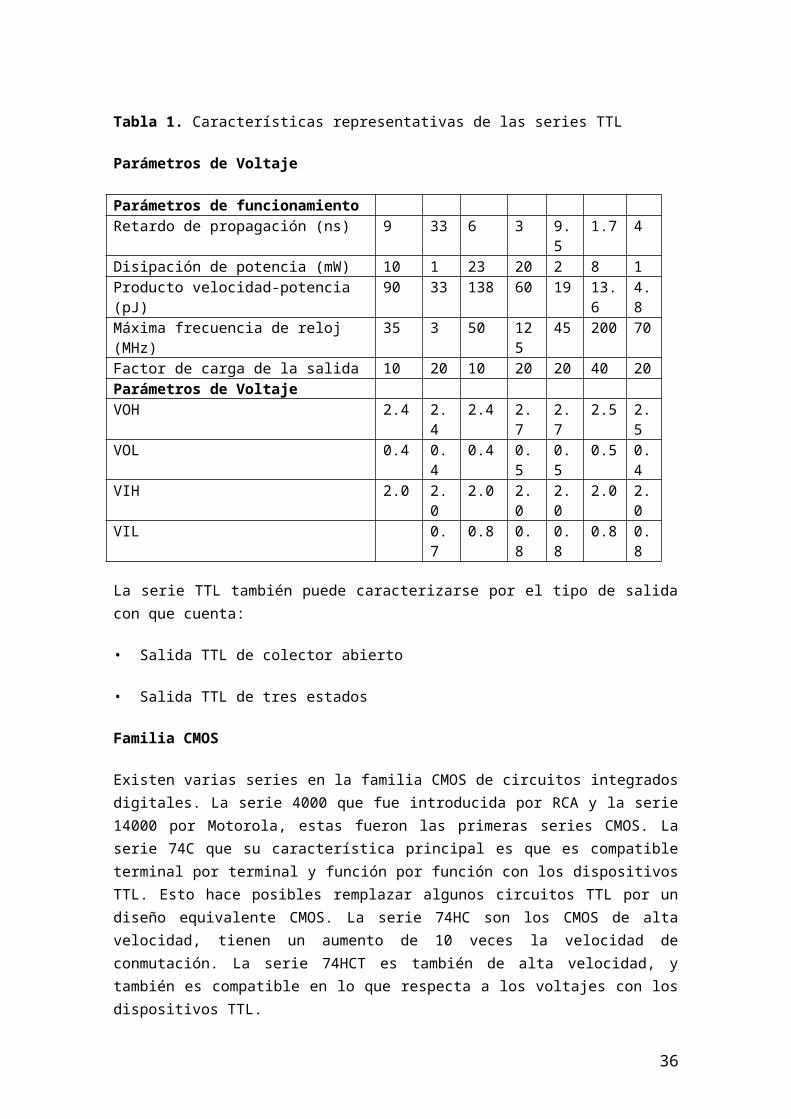
Tabla 1. Características representativas de las series TTL
Parámetros de Voltaje
Parámetros de funcionamientoRetardo de propagación (ns) 9 33 6 3 9.5 1.7 4Disipación de potencia (mW) 10 1 23 20 2 8 1Producto velocidad-potencia (pJ) 90 33 138 60 19 13.6 4.8Máxima frecuencia de reloj (MHz) 35 3 50 125 45 200 70Factor de carga de la salida 10 20 10 20 20 40 20Parámetros de VoltajeVOH 2.4 2.4 2.4 2.7 2.7 2.5 2.5VOL 0.4 0.4 0.4 0.5 0.5 0.5 0.4VIH 2.0 2.0 2.0 2.0 2.0 2.0 2.0VIL 0.7 0.8 0.8 0.8 0.8 0.8
La serie TTL también puede caracterizarse por el tipo de salida con que cuenta:
• Salida TTL de colector abierto
• Salida TTL de tres estados
Familia CMOS
Existen varias series en la familia CMOS de circuitos integrados digitales. La serie 4000 que fue introducida por RCA y la serie 14000 por Motorola, estas fueron las primeras series CMOS. La serie 74C que su característica principal es que es compatible terminal por terminal y función por función con los dispositivos TTL. Esto hace posibles remplazar algunos circuitos TTL por un diseño equivalente CMOS. La serie 74HC son los CMOS de alta velocidad, tienen un aumento de 10 veces la velocidad de conmutación. La serie 74HCT es también de alta velocidad, y también es compatible en lo que respecta a los voltajes con los dispositivos TTL.
Los voltajes de alimentación en la familia CMOS tiene un rango muy amplio, estos valores van de 3 a 15 V para los 4000 y los 74C. De 2 a 6 V para los 74HC y 74HCT.
Los requerimientos de voltaje en la entrada para los dos estados lógicos se expresa como un porcentaje del voltaje de alimentación.
27

Tenemos entonces:
VOL(max) = 0 V VOH(min) = VDD
VIL(max) = 30%VDD
VIH(min) = 70% VDD
Por lo tanto los márgenes de ruido se pueden determinar a partir de la tabla anterior y tenemos que es de 1.5 V. Esto es mucho mejor que los TTL ya que los CMOS pueden ser utilizados en medios con mucho más ruido. Los márgenes de ruido pueden hacerse todavía mejores si aumentamos el valor de VDD ya que es un porcentaje de este.
En lo que a la disipación de potencia concierne tenemos un consumo de potencia de sólo 2.5 nW cuando VDD = 5 V y cuando VDD = 10 V la potencia consumida aumenta a sólo 10 nW. Sin embargo tenemos que la disipación de potencia Serra baja mientras estemos trabajando con corriente directa. La potencia crece en proporción con la frecuencia. Una compuerta CMOS tiene la misma potencia de disipación en promedio con un 74LS en frecuencia alrededor de 2 a 3 MHz.
Ya que los CMOS tienen una resistencia de entrada extremadamente grande (1012 _) que casi no consume corriente. Pero debido a su capacitancia de entrada se limita el número de entradas CMOS que se pueden manejar con una sola salida CMOS. Así pues, el factor de carga de CMOS depende del máximo retardo permisible en la propagación. Comúnmente este factor de carga es de 50 para bajas frecuencias, para altas frecuencias el factor de carga disminuye.
Los valores de velocidad de conmutación dependen del voltaje de alimentación que se emplee, por ejemplo en una 4000 el tiempo de propagación es de 50 ns para VDD = 5 V y 25ns para VDD = 10 V. Como podemos ver mientras VDD sea mayor podemos operar en frecuencias más elevadas.
Hay otras características muy importantes que tenemos que considerar siempre, las entradas CMOS nunca deben dejarse desconectadas, todas tienen que estar conectadas a un nivel fijo de voltaje, esto es porque los CMOS son, al igual que los MOS muy susceptibles a cargas electrostáticas y ruido que podrían dañar los dispositivos.
Características de la familia CMOS.
La tecnología MOS (Metal Oxido Semiconductor) deriva su nombre de la estructura básica MOS de un electrodo metálico montado en un aislador de óxido sobre un subestrato semiconductor. Los transistores de la tecnología MOS son transistores de campo denominados MOSFET. La mayoría de los CI digitales MOS se construyen exclusivamente con MOSFET.
28

Características principales.
voltaje de alimentación
Las series 4000 y 74C funcionan con valores de VDD que van de 3 a 15V, por lo que la regulación de voltaje no es un aspecto crítico. Las series 74HC y 74HCT funcionan con voltajes de 2 a 6 V.
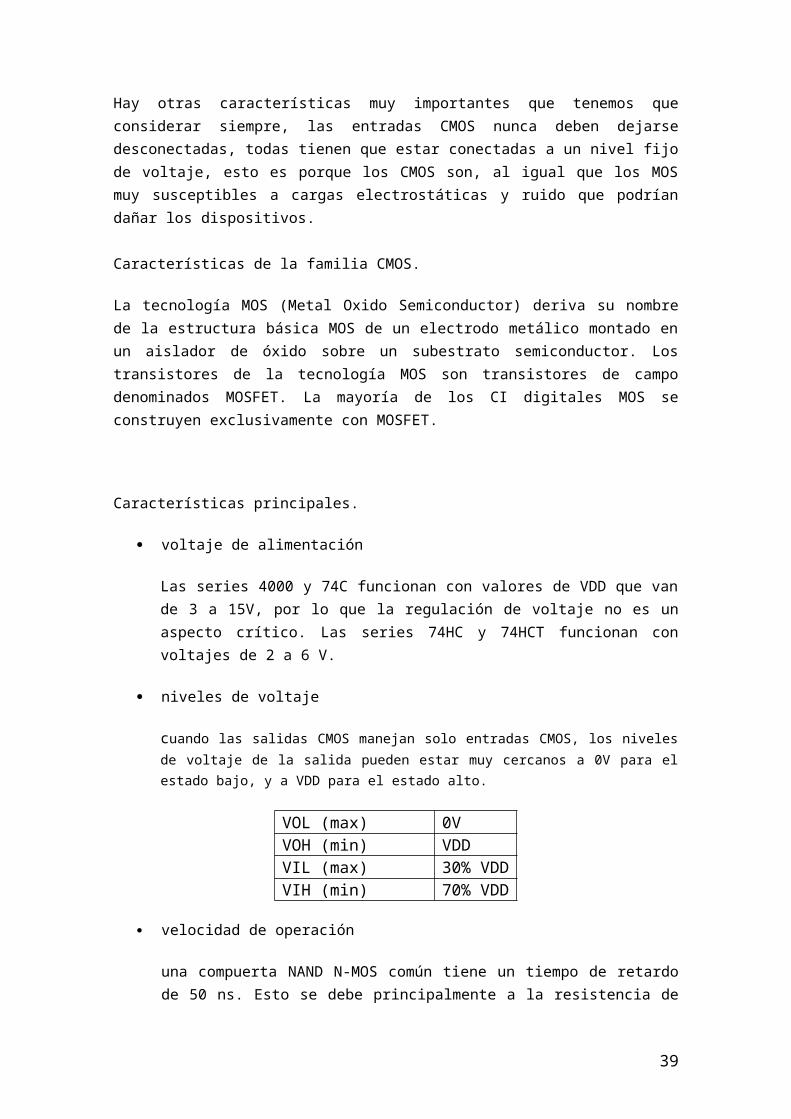
niveles de voltaje
cuando las salidas CMOS manejan solo entradas CMOS, los niveles de voltaje de la salida pueden estar muy cercanos a 0V para el estado bajo, y a VDD para el estado alto.
VOL (max) 0VVOH (min) VDDVIL (max) 30% VDDVIH (min) 70% VDD
velocidad de operación
una compuerta NAND N-MOS común tiene un tiempo de retardo de 50 ns. Esto se debe principalmente a la resistencia de salida relativamente alta (100k_) y la carga capacitiva representada por las entradas de los circuitos lógicos manejados.
margen de ruido
normalmente, los márgenes de ruido N-MOS están alrededor de 1.5V cuando operan desde VDD = 5 V, y serán proporcionalmente mayores para valores más grandes de VDD.
factor de carga
para circuitos operando en DC o de baja frecuencia, las capacidades del factor de carga son virtualmente ilimitadas. Sin embrago, para frecuencias mayores de 100 kHz, se observa un deterioro del factor de carga - siendo del orden de 50, lo que es un tanto mejor que en las familias TTL.
consumo de potencia
los CI MOS consumen pequeñas cantidades de potencia debido a las resistencias relativamente grandes que utilizan. A manera de ejemplo, se muestra la disipación de potencia del INVERSOR N-MOS en sus dos estados de operación.
• PD = 5V x 0.05nA = 0.25 nW y PD = 5V x 50_A = 0.25mW
29

complejidad del proceso
la lógica MOS es la familia lógica más simple de fabricar ya que utiliza un solo elemento básico, el transistor N-MOS (o bien el P-MOS), por lo que no requiere de otros elementos como diodos o resistencias (como el CI TTL).
Susceptibilidad a la carga estática
las familias lógicas MOS son especialmente susceptibles a daños por carga electrostática. Esto es consecuencia directa de la alta impedancia de entrada de estos CI. Una pequeña carga electrostática que circule por estas altas impedancias puede dar origen a voltajes peligrosos. La mayoría de los nuevos dispositivos CMOS están protegidos contra daño por carga estática mediante la inclusión en sus entradas de un diodo zener de protección. Estos diodos están diseñados para conducir y limitar la magnitud del voltaje de entrada a niveles muy inferiores a los necesarios para hacer daño.
Las principales series CMOS son:
• serie 4000/14000
• serie 74C
• serie 74HC (CMOS de alta velocidad)
• serie 74HCT
Diferencias entre las familias TTL y CMOS.
En comparación con las familias lógicas TTL, las familias lógicas MOS son más lentas en cuanto a velocidad de operación; requieren de mucho menos potencia; tienen un mejor manejo del ruido; un mayor intervalo de suministro de voltaje; un factor de carga más elevado y requieren de mucho menos espacio (área en el CI) debido a lo compacto de los transistores MOSFET. Además, debido a su alta densidad de integración, los CI MOS están superando a los CI bipolares en el área de integración a gran escala. (LSI - memorias grandes, CI de calculadora, microprocesadores, así como VLSI).
Por otro lado, la velocidad de operación de los CI TTL los hace dominar las categorías SSI o MSI (compuertas, FF y contadores). Consumo de Potencia 0.1 mW
Como podemos ver los circuitos MOS tiene algunos aspectos mejores y otros peores en comparación con los TTL o los ECL. El tiempo de retardo tan alto se debe a la alta resistencia de entrada que tienen estos dispositivos y a la capacitancia de entrada razonablemente alta. Los MOS consumen muy pequeñas cantidades de potencia por
30

lo que son ampliamente utilizados para el LSI y el VLSI, donde se guardan grandes cantidades de compuertas en un solo encapsulado sin ocasionar sobrecalentamiento.
Otro aspecto favorable es que los MOS son muy simples de fabricar, no requiere de otros elementos como resistencias o diodos. Esta característica y su bajo consumo de potencia son la causa de su gran auge en el campo digital.
La familia lógico MOS tiene una característica que no se había tomado en cuenta en las familias anteriormente estudiadas, la sensibilidad estática. Esto es, que los dispositivos MOS son sensibles a daño por electricidad estática. Al grado de que las mismas cargas almacenadas en el cuerpo humano pueden dañarlos. La descarga electrostática provoca grandes perdidas de estos dispositivos y circuitos electrónicos por lo que se deben tomar medidas especiales como: conectar todos los instrumentos a tierra física, conctarse a sí mismo a tierra física, mantener los CI en una esponja conductora o en papel aluminio; todo esto para evitar cargas electrostáticas que puedan dañar los dispositivos MOS.
Circuitos lógicos MOS complementarios
La familia CMOS utiliza MOSFET de canales P y N en el mismo circuito para obtener una mayor velocidad de operación y un menor consumo de potencia. El problema de los CMOS es la elevada complejidad del proceso de fabricación y su pequeña densidad de integración.
Sin embargo, la lógica CMOS tiene una mayor densidad de integración y el proceso de fabricación es más simple que la familia TTL.
Los P-MOSFET y los N-MOSFET con sus bloques marcados con P y N respectivamente. El inversor CMOS tiene dos MOSFET en serie de modo que el dispositivo con canal P está conectado a +VDD y el de canal N está conectado a tierra. Cuando tenemos VENT = +VDD la compuerta de Q1 está en 0V, esto quiere decir que Q1 está apagado. La compuerta Q2 estará en +VDD, de esta manera Q2 esta encendido. En el caso donde VENT = 0 V, Q1 esta encendido y Q2 apagado produciendo un voltaje de salida de aproximadamente + VDD.
La compuerta NAND está formada por la adición de un P-MOSFET en paralelo con un N-MOSFET en serie al inversor básico. Puede observarse entonces, que la única vez que una salida BAJA ocurrirá es cuando las entradas sean ambas ALTAS para encender los MOSFET de canal N.
Para una compuerta NOR CMOS necesitamos agregar un P-MOSFET en serie y un N-MOSFET en paralelo al inversor básico. Cuando tenemos un 0 lógico en cualquier entrada enciende P-MOSFET y apaga N-MOSFET, y viceversa para una entrada ALTA.
Sensibilidad a las cargas estáticas. Históricamente, este problema se ha resuelto mediante protecciones en las entradas del circuito. Pueden ser diodos en inversa conectados a masa y a la alimentación, que, además de proteger el dispositivo,
31
reducen los transistores o zener conectados a masa. Este último método permite quitar la alimentación de un sólo dispositivo.Latch-Up: Consiste en la existencia de un tiristor parásito en la estructura cmos que se dispara cuando la salida supera la alimentación. Esto se produce con relativa facilidad cuando existen transitorios por usar líneas largas mal adaptadas, excesiva impedancia en la alimentación o alimentación mal desacoplada. El Latch-Up produce un camino de baja resistencia a la corriente de alimentación, de modo que, si no se ha previsto, acarrea la destrucción del dispositivo. Las últimas tecnologías se anuncian como inmunes al latch-up.
Susceptibilidad a la radiación. El comportamiento de la estructura CMOS es sumamente sensible a la existencia de cargas atrapadas en el óxido. Una partícula alfa o beta que atraviese un chip CMOS puede dejar cargas a su paso, cambiando la tensión umbral de los transistores y deteriorando o inutilizando el dispositivo. Por ello existen circuitos "endurecidos" (Hardened), fabricados habitualmente en silicio sobre aislante (SOI)
PARA COMPRENDER ESTAS PARTICULARIDADES DE COMPORTAMIENTO DE AMBAS FAMILIAS TTL Y CMOS RECORDEMOS LAS CARACTERÍSTICAS ESPECÍFICAS DE LOS TRANSISTORES DE LA ESTRUCTURA INTERNA DE LOS CIRCUITOS INTEGRADOS PERTENECIENTES A CADA FAMILIA.Error: Reference source not foundError: Reference source not foundError: Reference source not found
32

PRACTICA
CMOS versus TTL
Autor: Ing. Irina Kuskova
E-mail: [email protected]
Área: Sistemas Digitales
Nivel: Educación Superior
INTRODUCCIÓNFamilia TTL y familia CMOS. Las diferencias en sus características les proporcionaron diferentes aplicaciones. Las TTL se las utilizan en laboratorios de estudios y en la etapa de diseño de nuevos equipos electrónicos, mientras los circuitos integrados de familia CMOS ocupan un papel importante en los equipos que funcionan en varios lugares de la industria y telecomunicaciones.
TAREA ¿A que se debe el bajo consumo de energía de los dispositivos CMOS? ¿Cuál es su talón de Aquiles? ¿Con que medidas resuelven este problema en lugares donde éstos trabajan?
PROCESO
· Investigar los circuitos internos de los CI de ambas familias. Notar las diferencias.· Averiguar a base de que tipo de transistores están formados los chips de CMOS y TTL.· Averiguar las características de ambas familias
33
RECURSOS Estos son los recursos a utilizar
Familia TTL - http://www.unicrom.com/Dig_Familia_TTL.asp Familia CMOS - http://es.wikipedia.org/wiki/CMOS Adicional - http://servicioalpc.com
EVALUACIÓNEn la evaluación final de la practica se tomara en cuenta los tres pilares con siguiente ponderación: El uso eficiente de Internet 8 puntosRespuesta a las preguntas formuladas 10 puntos Presentación del documento 7 puntos
CONCLUSIÓNEste proceso se quedará a cargo de los grupos integrantes del ejercicio. Espero que después de realizar esta webquest hayan logrado entenderás ventajas y desventajas del uso de cada familia de estos Circuitos Integrados, cada uno en sus respectivas áreas de trabajo.
¡SUERTE, MUCHACH@S!
34
4. UNIDAD IV: SISTEMAS NUMERICOS
Sistemas de Numeración.
Conocer sistemas de numeración como el binario o el hexadecimal es imprescindible si se quiere trabajar con el ordenador en el ámbito del software, pero también son necesarios para entender de forma correcta cuales son sus fundamentos.El ordenador no entiende nuestro lenguaje, solamente lo interpreta, adaptándolo al suyo propio: el binario.
Hay que perder el miedo a las matemáticas pues mediante ellas podemos alcanzar un conocimiento todo lo profundo que sea necesario del funcionamiento interno del ordenador.
Pero antes de nada es conveniente tener claros algunos conceptos que resultan fundamentales para lograr el citado conocimiento, como por ejemplo qué es un sistema de numeración.
Bueno, pues en términos muy sencillos un sistema de numeración es una forma unánimemente aceptada por la humanidad de contar las cosas. Dicho de otro modo y aunque suene a perogrullada, para saber que en la mano tenemos diez dedos hace falta que poseamos realmente diez dedos. O sea, diez unidades de dedo. Así, partiendo de su acumulación o suma conseguiremos la susodicha cantidad de diez.
Ahora imaginemos que tomamos esta cantidad (o sea diez) y a cada uno de sus elementos le asociamos un símbolo (al que los seres humanos llamamos dígito). La cosa quedaría más o menos así:
35
Tenemos entonces una lista de dígitos que comienza con el (0) y acaba con el nueve (9), o sea:
0, 1, 2, 3, 4, 5, 6, 7, 8 y 9
Bien, ya tenemos los diez dígitos básicos de nuestro sistema de numeración al que la humanidad ha llamado "de base 10" o DECIMAL precisamente por eso, por constar de diez dígitos.
A partir de aquí, y utilizando estos símbolos básicos podemos formar el número que queramos, como por ejemplo el diez mil novecientos cincuenta y seis (10.956).
Ahora que ya hemos visto como se forma un sistema de numeración de base diez (10), no nos será nada difícil imaginar como se forma uno de base dos (2). Este sistema de numeración de base dos (2) es precisamente el que constituye la base de funcionamiento de los actuales ordenadores o computadoras y está formado por los dígitos cero (0) y uno (1), los cuales representan en realidad la ausencia de una señal eléctrica (0) o su
36

presencia (1) dentro de los circuitos electrónicos del ordenador. A este sistema se le llama BINARIO.
Otro sistema de numeración muy conocido y utilizado dentro del mundo de la informática es el HEXADECIMAL. Este sistema consta de 16 dígitos (hexa=6 y decimal=10) que son los siguientes:
0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F
Aquí las letras también son dígitos y se utilizan igual que en el sistema decimal. En este caso, si queremos formar un número no tenemos más que juntar los dígitos como hacíamos antes, por ejemplo el 1F7D3 que en decimal sería el 128.979.
Otro sistema de numeración es el OCTAL que consta de nueve dígitos (0 a 8). Este no es un sistema de numeración tan popular como el hexadecimal en el ámbito de la informática, pero sus ventajas son evidentes. La más evidente es la de que sólo se manejan nueve dígitos, frente a los dieciséis del hexadecimal.
Ya posees los conocimientos básicos que te permiten comprender de forma clara la filosofía de funcionamiento de un ordenador. Ausencia o presencia de una señal
eléctrica o de varias a la vez en un terminal o conexión es el lenguaje que utiliza el ordenador para "hablar" consigo mismo y con sus periféricos de forma coherente.
Existen básicamente 3 tipos de sistemas de numeración.
Sistema Binario.
El sistema binario se compone de 2 dígitos como su nombre lo indica el 0 y 1. Sistema Octal
El sistema octal se compone de 7 dígitos el 0,1, 2, 3, 4, 5, 6,7. Sistema Hexadecimal.
El sistema hexadecimal se compone de 15 dígitos el 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F.
Conversión Decimal - Binario
Este sistema lo emplean las computadoras para trabajar internamente.
Para transformar un número decimal al sistema binario, se realizan divisiones enteras sucesivas entre 2, hasta que el resultado sea cero.
Por ejemplo:
37

Pasar a binario él número 67.
32 16 8 4 2 1
Aquí se está realizando la división entera.
2 | 67 2 | 32 2 | 16 2 | 8 2 | 4 2 | 2 2| 1 Es decir lo que queda de residuo se deja.
1 1 0 0 0 0 1
El resultado se lee empezando con el ultimo residuo.
Entonces 67 =1000011 2 Hay que recordar que el número es decimal, es decir 67= 6710
Otros ejemplos serian:
125 = 11111012
255 = 111111112
512 = 10000000002
264 = 1000010002
214 = 110101102
El subíndice es un 2 para indicar que es un número binario l
Conversión Decimal - Octal
Para transformar un número decimal al sistema octal, se realizan divisiones enteras sucesivas entre 8, hasta que el resultado sea cero.
Por ejemplo
Pasar a octal el número 63.
7 0 Se realiza únicamente la división entera
8 | 63 8 | 7 El resultado se lee tomando el último residuo, siguiendo con el anterior.
7 7 Entonces 63 10 =77 8
Otros ejemplos serian:
38
425 = 6518 El subíndice es un 8 para indicar que es un número octal.
278 = 4268
1512 = 27508
2001=37218
Conversión Decimal – Hexadecimal
Para transformar un número decimal al sistema hexadecimal, se realizan divisiones enteras sucesivas entre 16 hasta que el resultado sea cero.
Este sistema lo emplean las computadoras para trabajar internamente.
Por ejemplo
Pasar a hexadecimal el número 10.
0 Obtenemos Cero por ser la división entera
16 | 10
10 10 en Hexadecimal es resulta ser A. Entonces 10 10
=A 16
Otros ejemplos serán:
1525 = 5F516 El subíndice es un 16 para indicar que es un número hexadecimal.
3984 = F9016
7569 = 1D9116
Conversión Binario – Hexadecimal
Cuando se tiene un número en binario y se desea pasarlo al sistema hexadecimal se forman parejas de 4 en 4 empezando de derecha a izquierda.
Por ejemplo.
Pasar el número 1110111012= Hexadecimal
Solución
39
Empezamos tomando parejas de 4 en 4 de derecha a izquierda
Como el número esta en binario la base es 2.
Tomamos sus potencias en orden ascendente empezando desde el cero, de derecha a izquierda
Como se muestra a continuación.
1 , 1 1 0 1 , 1 1 0 12 = Hexadecimal
20 23 22 21 20 23 22 21 20 Y sumamos. (Recordar que 13 en hexadecimal es D)
1, 8 + 4 + 0 + 1, 8 + 4 + 0 + 1 = 1 D D 16
Conversión Binario – Decimal
Cuando se tiene un número en binario y se desea pasarlo al sistema decimal se toma cada uno de los dígitos empezando por la ultima posición hasta la primera.
Y multiplicamos cada dígito por la respectiva posición de la potencia de 2.
Por ejemplo.
Pasar el número 1110111012= Decimal
Solución
Como el número esta en binario la base es 2.
Tomamos sus potencias en orden ascendente empezando desde el cero, de derecha a izquierda
Como se muestra a continuación
1 1 1, 0 1 1, 1 0 12 = Decimal
28 27 26 25 24 23 22 21 20
Posteriormente tomamos cada uno de los dígitos y lo multiplicamos por el 2 ala potencia respectiva.
Y sumamos.
20 x 1 = 1 x 1 = 1
21 x 0 = 2 x 0 = 0
40
22 x 1 = 4 x 1 = 4
23 x 1 = 8 x 1 = 8
24 x 1 = 16 x 1 = 16
25 x 0 = 32 x 1 = 0
26 x 1 = 64 x 1 = 64
28 x 1 = 128 x 1 = 128
28 x 1 = 256 x 1 = 256
Y sumando obtenemos 477
Entonces 1110111012=47710
Otros ejemplos serian:
111110 2 = 62
101010102 = 170
100000012 = 65
Conversión Binario – Octal
Cuando se tiene un número en binario y se desea pasarlo al sistema octal se forman parejas de 3 en 3 empezando de derecha a izquierda.
Por ejemplo.
Pasar el número 1110111012= Octal
Solución
Empezamos tomando parejas de 3 en 3 de derecha a izquierda
Como el número esta en binario la base es 2.
Tomamos sus potencias en orden ascendente empezando desde el cero, de derecha a izquierda
Como se muestra a continuación.
Y sumamos.
1 1 1 , 0 1 1 , 1 0 12 = Octal
41

22 21 20 22 21 20 22 21 20
4 + 2 +1 2 + 1 4 + 1 =7 3 5 8
Esto es de para la primer pareja
20 x 1 = 1 x 1 = 1
21 x 0 = 2 x 0 = 0 Si sumamos obtenemos 5
22 x 1 = 4 x 1 = 4
Para la segunda pareja
20 x 1 = 1 x 1 = 1
21 x 1 = 2 x 1 = 2 Si sumamos obtenemos 3
22 x 0 = 4 x 0 = 0
Y la tercer pareja
20 x 1 = 1 x 1 = 1
21 x 1 = 2 x 1 = 2 Si sumamos obtenemos 7
22 x 1 = 4 x 1 = 4
Y se leen en orden inverso
Operaciones con números binarios
Suma de números binariosRecordamos las siguientes sumas básicas:
1. 0+0=0 2. 0+1=1 3. 1+1=10
Así, si queremos sumar 100110101 más 11010101, tenemos: 100110101 11010101 ----------- 1000001010Operamos como en decimal: comenzamos a sumar desde la derecha, en nuestro ejemplo, 1 + 1 = 10, entonces escribimos 0 y "llevamos" 1 (Esto es lo que se llama el arrastre, carry en inglés). Se suma este 1 a la siguiente columna: 1 + 0 + 0 = 1, y seguimos hasta terminar todas la columnas (exactamente como en decimal).
42

Resta de números binariosEl algoritmo de la resta, en binario, es el mismo que en el sistema decimal. Pero conviene repasar la operación de restar en decimal para comprender la operación binaria, que es más sencilla. Los términos que intervienen en la resta se llaman minuendo, sustraendo y diferencia.
Las restas básicas 0-0, 1-0 y 1-1 son evidentes: 0 – 0 = 0 1 – 0 = 1 1 – 1 = 0
La resta 0 - 1 se resuelve, igual que en el sistema decimal, tomando una unidad prestada de la posición siguiente: 10 - 1 = 1 y me llevo 1, lo que equivale a decir en decimal, 2 – 1 = 1 . Esa unidad prestada debe devolverse, sumándola, a la posición siguiente. Veamos algunos ejemplos:Restamos 17 - 10 = 7 Restamos 217 - 171 = 46 10001 11011001 -01010 -10101011 ------ --------- 00111 00101110A pesar de lo sencillo que es el procedimiento, es fácil confundirse. Tenemos interiorizado el sistema decimal y hemos aprendido a restar mecánicamente, sin detenernos a pensar en el significado del arrastre. Para simplificar las restas y reducir la posibilidad de cometer errores hay varias soluciones:
Dividir los números largos en grupos. En el siguiente ejemplo, vemos cómo se divide una resta larga en tres restas cortas:
Restamos 100110011101 1001 1001 1101 -010101110010 -0101 -0111 -0010 ------------- = ----- ----- ----- 010000101011 0100 0010 1011
Utilizando el Complemento a dos. La resta de dos números binarios puede obtenerse sumando al minuendo el complemento a dos del sustraendo. Veamos algunos ejemplos:
Hagamos la siguiente resta, 91 – 46 = 45, en binario: 1011011 1011011 -0101110 C2
46 = 1010010 +1010010 -------- -------- 0101101 10101101
En el resultado nos sobra un bit, que se desborda por la izquierda. Pero, como el número resultante no puede ser más largo que el minuendo, el bit sobrante se desprecia.
43

Un último ejemplo. Vamos a restar 219 – 23 = 196, directamente y utilizando el complemento a dos:
11011011 11011011 -00010111 C2
23 = 11101001 +11101001 --------- -------- 11000100 111000100Y, despreciando el bit que se desborda por la izquierda, llegamos al resultado correcto: 11000100 en binario, 196 en decimal
Producto de números binariosEl producto de números binarios es especialmente sencillo, ya que el 0 multiplicado por cualquier numero da 0, y el 1 es el elemento neutro del producto.Por ejemplo, multipliquemos 10110 por 1001: 10110 1001 --------- 10110 00000 00000 10110 --------- 11000110
Códigos binarios y alfanuméricos
Código es la correspondencia que asigna a cada símbolo de un conjunto dado, una determinada correspondencia de otro conjunto, según las reglas determinadas de conversión.
Código Binario
Los códigos binarios utilizan dos símbolos numéricos: 0 y 1. Ej. En el Código ASCII, se representan letras, números, símbolos... y es un código de 8 Bits
El proceso de hacer corresponder a cada símbolo del alfabeto fuente el código se llama codificación. Al proceso contrario Decodificación.
Propiedades1. Un código binario es ponderado cuando a cada dígito binario, le corresponde
un peso según su posición. 2. Distancia del código es la distancia menor (diferencia de bits). 3. Un código continuo es que dos palabras código consecutivas son adyacentes.
Ej. Códigos Gray ó Johnson" 4. Código cíclico aquel que además de ser continuo, la primera palabra y la última
también lo son.
44

En informática, y en conjunto electrónica se han empleado a lo largo del tiempo códigos binarios, entre ellos BCD (con las variantes Natural, Aiken y Exceso 3) y Gray, códigos escritos puramente en binario pero usando otras reglas.Los códigos binarios que se utilizan en los sistemas digitales para almacenar información, hacer operaciones aritméticas, reparar errores...Los códigos binarios pueden ser numéricos o alfanuméricos, dependiendo de si sólo codifican números o caracteres (incluidos números), respectivamente.A continuación se tiene una clasificación de los principales códigos binarios:
Códigos Numéricos
1. Binario Natural 2. BCD
Ponderado
Natural (Código decimal codificado en binario) Aiken (Código decimal codificado en binario) 5 4 2 1
No Ponderado
Exceso 3
Continuos
1. Gray 2. Johnson
Códigos alfanuméricos
1. Código ASCII 2. Código estándar ISO-8859-1
Detección de errores
En el ordenador, los datos están moviéndose continuamente: teclado-memoria, memoria-pantalla, etc.Por lo tanto, debemos asegurarnos que dicho movimiento no cause errores en los datos. El método para detectar y corregir errores es incluir en los bloques de datos transmitidos bits adicionales denominados redundancia.Se han desarrollado dos estrategias básicas para manejar los errores:
Incluir suficiente información redundante en cada bloque de datos para que se puedan detectar y corregir los bits erróneos. Se utilizan códigos de corrección de errores.
Incluir sólo la información redundante necesaria en cada bloque de datos para detectar los errores. En este caso el número de bits de redundancia es menor. Se utilizan códigos de detección de errores.
45

Si consideramos un bloque de datos formado por m bits de datos y r de redundancia, la longitud final del bloque será n, donde n = m + r.
Detectores de errores
Biquinario 2 entre 5 Con bit de paridad
46

Corrección de errores
Otra tarea importantísima de la capa de enlace (y de las demás capas superiores) es la de detectar, y si se desea, corregir errores ya que el nivel físico tradicionalmente no está libre de errores por ruido termal, interferencias electromagnéticas, etc.
Para detectar que hubo un error, al enviarse un marco se guarda en una tabla cuándo se envió y se le asocia un tiempo para recibir su confirmación. Si no se recibe la confirmación por parte del receptor, se re-envía el marco. El problema que puede surgir es que si se perdió la confirmación, el receptor puede tener marcos duplicados, lo cual se soluciona al asignar un número de secuencia a cada marco, para descartar los duplicados y re-enviar su confirmación.
Otra forma de detectar un error (que ya no fue la pérdida del marco, sino la corrupción de su contenido), es insertar un código de chequeo, y para esta labor se utilizan códigos basados en el concepto de "distancia de Hamming". La distancia de Hamming para un código cualquiera se define como el número de bits diferentes al hacer un XOR entre todos sus símbolos.
Si los símbolos de un código difieren a lo menos en 2X+1 bits, al variar X bits (dañar X bits) obtenemos un nuevo símbolo que se parecerá más en un bit a un código válido que a otro código válido y por lo tanto podemos decir que el símbolo dañado en realidad es el más parecido realizando así su corrección.
Para el diseño estándar de protocolos, se han especificado algunas cadenas de chequeo bien conocidas llamadas CRC-12, CRC-16 y CRC-CCITT con R=12,16 y 16 bits respectivamente. Estas cadenas se interpretan como polinomios de la manera que sigue.
CRC-12 = 1100000001111 = X12 + X11 + X3 + X2 + X + 1.
CRC-16 = 11000000000000101 = X16 + X15 + X2 + 1
CRC-CCITT = 10001000000100001 = X16 + X12 + X5 + 1
Observemos que la posición del bit con un uno representa la potencia del polinomio. Cada uno de estos polinomios se conocen como "generador polinomial" y las siglas CRC significan "Cyclic Redundancy Code".
Los tres pasos para detectar errores con estos polinomios son:
1. Si el CRC es de grado R, tome el marco de tamaño M y concaténele R ceros al final generando una nueva cadena o polinomio P.
2. Divida el polinomio P entre el CRC correspondiente usando división de módulo dos. En esta división se va a obtener un residuo K.
47

3. Réstele K al polinomio P usando resta de módulo dos obteniendo así una cadena T. La cadena T es el marco que será enviado a través de la capa física
Practica
1. El número 2D a base16 (hexadecimal) convertir: a) en base 2 (binario) b) en base 10 (decimal) c) en base 8 (octal)
2. El numero 27 a base16(hexadecimal) convertir: a) en base 2 (binario) b) en base 10 (decimal) c) en base 8 (octal)
48

5. UNIDAD V: ALGEBRA DE BOOLE Y COMPUERTAS LOGICAS
Álgebra de Boole
Álgebra de Boole (también llamada Retículas booleanas) en matemáticas y computación, son estructuras algebraicas que "capturan la esencia" de las operaciones lógicas Y, O y NO, así como el conjunto de operaciones unión, intersección y complemento.
Se denomina así en honor a George Boole, matemático inglés que fue el primero en definirla como parte de un sistema lógico a mediados del siglo XIX. Específicamente, el álgebra de Boole fue un intento de utilizar las técnicas algebraicas para tratar expresiones de la lógica proposicional. En la actualidad el álgebra de Boole se aplica de forma generalizada en diseño electrónico. Se aplicó por primera vez en circuitos de conmutación eléctrica biestables por Claude Shannon en 1938.
Los operadores del álgebra de Boole pueden representarse de varias formas. A menudo se representan simplemente como AND (Y), OR (O) y NOT (NO). En electrónica digital (véase puerta lógica) también se emplean la X-OR (O exclusiva) y su negadas NAND (NO Y), NOR (NO O) y X-NOR (equivalencia).
En matemáticas a menudo se utiliza + en lugar de OR y · en lugar de AND, debido a que estas operaciones son de alguna manera análogas a la suma y el producto en otras estructuras algebraicas, y NOT se representa como una línea o una comilla sobre la expresión que se pretende negar (NO A sería Ā o A').
En este texto se empleará la notación común con para el operador AND, para el operador OR y ¬ (o ~) para el operador NOT.
Definición
De hecho, puede definirse un álgebra de Boole como una retícula distributiva A, ≤) (considerada como un conjunto parcialmente ordenado) con elemento mínimo 0, elemento máximo 1, en la que cada elemento x tiene un complemento ¬x tal quex ¬x = 0 and x ¬x = 1 Un álgebra de Boole es una retícula (A, , ) (considerada como una estructura algebraica) con las siguientes cuatro propiedades adicionales:
1. Acotada inferiormente: Existe un elemento 0, tal que a 0 = a para todo a perteneciente a A.
2. Acotada superiormente: Existe un elemento 1, tal que a 1 = a para todo a perteneciente a A.
3. Distributiva: Para todo a, b, c pertenecientes a A, (a b) c = (a c) (b c).
4. Con complemento: Para cualquier a perteneciente a A existe un elemento ¬a perteneciente a A tal que a ¬a = 1 y a ¬a = 0.
49
De esos axiomas se desprende que el elemento mínimo 0, el elemento máximo 1, y el complemento ¬a de un elemento a están únicamente determinados.
Como cualquier retícula, un Álgebra Booleana A, , ) da lugar a un conjunto parcialmente ordenado (A, ≤) definiendo
a ≤ b si y sólo si a = a b
(que equivale a b = a b).
Aquí y se usan para denotar el mínimo (intersección) y el máximo (unión) de dos elementos. De nuevo, si existe el complemento está únicamente determinado.
Ejemplos
El álgebra de Boole más importante tiene sólo dos elementos, 0 y 1, y se define por las reglas
0 1 0 1 ---- ---- 0 | 0 1 0 | 0 0 1 | 1 1 1 | 0 1
Tiene aplicaciones en la lógica, donde 0 se interpreta como "falso", 1 como "verdadero", como "y", como "o", y ¬ es "no". Las expresiones que involucran variables y operadores booleanos representan proposiciones, y se puede demostrar que dos expresiones son equivalentes usando los axiomas citados anteriormente si y sólo si las correspondientes proposiciones son lógicamente equivalentes.
El álgebra de Boole de dos elementos también se utiliza para diseño de circuitos en ingeniería electrónica; aquí 0 y 1 representan los dos posibles estados en circuitos digitales, típicamente un voltaje alto y uno bajo.
Los circuitos se describen mediante expresiones que contienen variables, y dos de estas expresiones son iguales si y sólo si los correspondientes circuitos tienen el mismo comportamiento de entrada y salida. Además, cada posible comportamiento de entrada-salida puede ser expresado mediante una expresión booleana.
El álgebra de Boole de dos elementos también es importante en la teoría general de las álgebras de Boole, porque una ecuación que implica varias variables es cierta en todas las álgebras booleanas si y sólo si es cierta en un álgebra booleana de dos elementos (lo cual siempre puede ser verificado utilizando el algoritmo trivial de fuerza bruta). Esto puede aplicarse para demostrar que las siguientes leyes (Teoremas del consenso) son válidos en todas las álgebras booleanas:
(a b) (¬a c) (b c) = (a b) (¬a c) (a b) (¬a c) (b c) = (a b) (¬a c)
50
El conjunto de partes de un conjunto dado S forma un álgebra de Boole con las dos operaciones = unión and = intersección. El elemento mínimo 0 es el conjunto vacío y el elemento máximo 1 es el propio conjunto S.
Compuertas lógicas digitales
Una compuerta lógica, es un dispositivo electrónico que es la expresión física de un operador booleano en la lógica de conmutación. Cada puerta lógica consiste en una red de dispositivos interruptores que cumple las condiciones booleanas para el operador particular. Son esencialmente circuitos de conmutación integrados en un chip.
Claude Elwood Shannon experimentaba con relés o interruptores electromagnéticos para conseguir las condiciones de cada compuerta lógica, por ejemplo, para la función booleana Y (AND) colocaba interruptores en circuito serie, ya que con uno solo de éstos que tuviera la condición "abierto", la salida de la compuerta Y sería = 0, mientras que para la implementación de una compuerta O (OR), la conexión de los interruptores tiene una configuración en circuito paralelo.
La tecnología microelectrónica actual permite la elevada integración de transistores actuando como conmutadores en redes lógicas dentro de un pequeño circuito integrado. El chip de la CPU es una de las máximas expresiones de este avance tecnológico.
Lógica directa
Puerta SI
Símbolo de la función lógica SI a) Contactos, b) Normalizado y c) No normalizadoLa compuerta lógica SI, realiza la función booleana igualdad. En la práctica se suele utilizar como amplificador de corriente (buffer en inglés).La ecuación característica que describe el comportamiento de la puerta SI es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta SI
Entrada A Salida A
0 0
1 1
51

Puerta Y (AND)
Símbolo de la función lógica Y a) Contactos, b) Normalizado y c) No normalizadoLa puerta lógica Y, más conocida por su nombre en inglés AND, realiza la función booleana de producto lógico. Su símbolo es un punto (·), aunque se suele omitir. Así, el producto lógico de las variables A y B se indica como AB, y se lee A y B o simplemente A por B.La ecuación característica que describe el comportamiento de la puerta AND es:
Su tabla de verdad es la siguiente:
Entrada A Entrada B Salida0 0 00 1 01 0 01 1 1
Su definición se puede dar, como una compuerta que entrega un 1 lógico sólo si todas las entradas están a nivel alto 1.
Puerta O (OR)
Símbolo de la función lógica O. a) Contactos, b) Normalizado y c) No normalizadoLa puerta lógica O, más conocida por su nombre en inglés OR, realiza la operación de suma lógica. Su símbolo es el más (+). Así la suma lógica de las variables A y B se indica como A + B y se lee A o B o simplemente A más B. En la figura de la derecha pueden observarse sus símbolos en electrónica.La ecuación característica que describe el comportamiento de la puerta OR es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta OR
Entrada A Entrada B Salida0 0 00 1 11 0 11 1 1
52
Podemos definir la puerta O como aquella que proporciona a su salida un 1 lógico si al menos una de sus entradas está a 1.
Puerta OR-exclusiva (XOR)
Símbolo de la función lógica O-exclusiva. a) Contactos, b) Normalizado y c) No normalizadoLa puerta lógica O-exclusiva, más conocida por su nombre en inglés XOR, realiza la de la derecha pueden observarse sus símbolos en electrónica. Función booleana A'B+AB'. Su símbolo es el más (+) inscrito en un círculo. La ecuación característica que describe el comportamiento de la puerta XOR es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta XOR
Entrada A Entrada B Salida0 0 00 1 11 0 11 1 0
Se puede definir esta puerta como aquella que proporciona un 1, sólo si las dos entradas son distintas, esto es, 1 y 0 ó 0 y 1.
Lógica negada
Puerta NO (NOT)
Símbolo de la función lógica NO a) Contactos, b) Normalizado y c) No normalizadoLa puerta lógica NO (NOT en inglés) realiza la función booleana de inversión o negación de una variable lógica.La ecuación característica que describe el comportamiento de la puerta NOT es:
Su tabla de verdad es la siguiente:
53

Tabla de verdad puerta NOT
Tabla de verdad puerta NOT
Entrada A Salida A
0 1
1 0
Se puede definir como una puerta que proporciona el estado inverso del que esté en su entrada.
Puerta NO-Y (NAND)
Símbolo de la función lógica NO-Y. a) Contactos, b) Normalizado y c) No normalizadoLa puerta lógica NO-Y, más conocida por su nombre en inglés NAND, realiza la operación de producto lógico negado. En la figura de la derecha pueden observarse sus símbolos en electrónica.La ecuación característica que describe el comportamiento de la puerta NAND es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta NAND
Entrada A Entrada B Salida0 0 10 1 11 0 11 1 0
Podemos definir la puerta NO-Y como aquella que proporciona a su salida un 0 lógico únicamente cuando todas sus entradas están a 1.
Puerta NO-O (NOR)
Símbolo de la función lógica NO-O. a) Contactos, b) Normalizado y c) No normalizadoLa puerta lógica NO-O, más conocida por su nombre en inglés NOR, realiza la operación de suma lógica negada. En la figura de la derecha pueden observarse sus símbolos en electrónica.La ecuación característica que describe el comportamiento de la puerta NOR es:
54
Su tabla de verdad es la siguiente:
Tabla de verdad puerta OR
Entrada A Entrada B Salida0 0 10 1 01 0 01 1 0
Podemos definir la puerta NO-O como aquella que proporciona a su salida un 1 lógico sólo cuando todas sus entradas están a 0. La puerta lógica NOR constituye un conjunto completo de operadores.
Puerta equivalencia (XNOR)
Símbolo de la función lógica equivalencia. a) Contactos, b) Normalizado y c) No normalizadoLa puerta lógica equivalencia, más conocida por su nombre en inglés XNOR, realiza la función booliana AB+A'B'. Su símbolo es un punto (·) inscrito en un círculo. En la figura de la derecha pueden observarse sus símbolos en electrónica. La ecuación característica que describe el comportamiento de la puerta XOR es:
Su tabla de verdad es la siguiente:
Tabla de verdad puerta XNOR
Entrada A Entrada B Salida0 0 10 1 01 0 01 1 1
55
Se puede definir esta puerta como aquella que proporciona un 1 lógico, sólo si las dos entradas son iguales, esto es, 0 y 0 ó 1 y 1.
56
Puertas lógicas triestadoLas puertas lógicas triestado (de tres estados), son un tipo de puertas es las cuales la salida tiene, además de los niveles alto y bajo, un tercer estado de alta impedancia normalmente representado por Z.
El estado Z se implementa únicamente para facilitar el diseño de los circuitos, y no contiene ninguna información. Esta característica se utiliza en circuitos en los cuales las salidas de varias puertas lógicas se conectan a una única entrada, (evitando así un cortocircuito).
Una entrada de control activa una única salida a la vez, dependiendo de la operación lógica requerida por el diseñador, mientras que las otras salidas se mantienen en el estado Z de alta impedancia (también denominado 'deshabilitado').
57
6. UNIDAD VI: LOGICA COMBINACIONAL
Procedimiento de Diseño
El diseño de un circuito combinacional se inicia con las especificaciones verbales de una función requerida y culmina con un conjunto de funciones booleanas de salida o un diagrama lógico.
El análisis de un circuito combinacional es en cierta forma el proceso inverso. Empieza con un diagrama lógico dado y termina con un conjunto de funciones booleanas, una tabla de verdad o una explicación verbal de la operación del circuito.
Si el diagrama lógico que va a analizarse se acompaña con una función nombre o una explicación de lo que se supone que realiza, entonces el problema del análisis se reduce a una verificación de la función enunciada.
El primer paso en el análisis es tener la seguridad de que el circuito dado es combinacional y no secuencial.
El diagrama de un circuito combinacional tiene compuertas lógicas sin trayectorias de retroalimentación o elementos de memoria. Una trayectoria de retroalimentación es una conexión de la salida de una compuerta a la entrada de una, segunda compuerta que forma parte de la entrada a la primera compuerta. Las trayectorias de retroalimentación o elementos de memoria en un circuito digital definen un circuito secuencial.
Una vez que se ha verificado que el diagrama lógico es un circuito combinacional, puede procederse a obtener las funciones booleanas de salida y/o la tabla de verdad. Si el circuito está acompañado por una explicación verbal de su función, entonces las funciones booleanas o la tabla de verdad son suficientes para la verificación.
Si la función del circuito está bajo investigación, entonces es necesario interpretar la operación del circuito mediante la tabla de verdad derivada.
El éxito de tal investigación se favorece si se tiene experiencia previa y familiaridad con una amplia variedad de circuitos digitales. La habilidad para correlacionar una tabla de verdad con una tarea de procesamiento de información es un arte que se adquiere con la experiencia.
Para obtener las funciones booleanas de salida de un diagrama lógico, se procede como sigue:
1. Se etiquetan con símbolos arbitrarios todas las salidas de compuerta que son una función de las variables de entrada. Se obtienen las funciones booleanas para cada compuerta.
58

2. Se etiqueta con otros símbolos arbitrarios las compuertas que son una función de las variables de entrada y/o compuertas previamente etiquetadas. Se encuentran las funciones booleanas para esas compuertas..
3. Se repite el proceso delineado en el paso 2 hasta que se han obtenido las salidas del circuito.
4. Por sustitución repetida de las funciones previamente definidas, se obtienen las funciones booleanas de salida en términos sólo de las variables de entrada.
Sumadores
Las computadoras digitales realizan una variedad de tareas de procesamiento' de información. Entre las funciones básicas encontradas están las diversas operaciones aritméticas. Sin duda, la operación aritmética más básica es la adición de dos dígitos binarios.
Esta adición simple consta de cuatro operaciones elementales posibles, a saber,
O + O = O, O + 1 = 1, 1 + O = 1 y 1+ 1 = 10.
Las primeras tres operaciones producen una suma cuya longitud es un dígito, pero cuando tanto los bits sumando como adendo son iguales a 1, la suma binaria consta dedos dígitos.
El bit significativo más alto de este resultado se denomina acarreo. Cuando los números sumando y adendo contienen más dígitos significativos, la cuenta que se lleva obtenida por la adición de dos bits se añade al siguiente par de orden más alto de bits significativos.
Un circuito combinacional que lleva a cabo la adición de dos bits se denomina medio sumador. Uno que lleva a cabo la adición de tres bits (dos bits significativos y una cuenta que se lleva previa) es un sumador completo.
El nombre del primero proviene del hecho de que dos medios sumadores se emplean para implementar un adicionador completo.
Medio Sumador
De la explicación verbal del medio sumador, se encuentra que este circuito necesita dos entradas binarias y dos salidas binarias. Las variables de entrada designan los bits sumando y adendo; las variables de salida producen la suma y el acarreo. Es necesario especificar dos variables de salida debido a que el resultado puede constar de dos dígitos binarios.
Se asignan en forma arbitraria los símbolos x y y a las dos entradas y S (de suma) y C (para el acarreo) a las salidas.
59

Ahora que se han establecido el número y nombres de las variables de entrada y salida, ya puede formularse una tabla de verdad para identificar en forma exacta la función del medio sumador. Esta tabla de verdad se muestra a continuación:
x y C S 0 0 0 0 0 1 0 1 1 0 0 1 1 1 1 0
El acarreo de salida es 0 a menos que ambas entradas sean 1. La salida S representa el bit menos significativo de la suma.
La función booleana simplificada de las dos salidas puede obtenerse de manera directa mediante la tabla de verdad. Las expresiones simplificadas en suma de productos son:
S= x’y + xy’
C = xy
Sumador Completo
Un sumador completo es un circuito combinacional que formar la suma aritmética de tres bits de entrada. Consta de tres entradas y dos salidas. Dos de las variables de entrada, que se indican por x y y se presentan los dos bits significativos que van a añadirse. La tercera entrada, z, representa la cuenta que se lleva de la posición previa significativa más baja.
Son necesarias dos salidas debido a que la suma aritmética de tres dígitos binarios varia en valor desde 0 a 3 y el 2 o 3 binarios requieren dos dígitos. Las dos salidas se denotan por los símbolos S para suma y C para la cuenta que se lleva.
La variable binaria S da el valor del bit menos significativo de la suma.
La variable binaria C da la cuenta que se lleva de salida. La tabla de verdad del sumador completo es como sigue:
x y z | C S 0 0 0 0 0 0 0 1 0 1 0 1 0 0 1 0 1 1 1 0 1 0 0 0 1 1 0 1 1 0 1 1 0 1 0 1 1 1 1 1
60

Los ocho renglones bajo las variables de entrada denotan todas las combinaciones posibles de 1 y 0 que pueden tener esas variables. Los 1 y 0 de las variables de salida se determinan de la suma aritmética de los bits de entrada. Cuando todos los bits de entrada son 0, la salida es 0. La salida S es igual a 1 sólo cuando una entrada es igual a 1, o cuando todas las tres entradas son iguales a 1. La salida C tiene una cuenta que se lleva de 1 si dos o tres entradas son iguales a 1.
Los bits de entrada y salida del circuito combinacional tienen diferentes interpretaciones en las diversas etapas del problema. En forma física las señales binarias de los alambres de entrada se consideran dígitos binarios agregados de manera aritmética para dar una suma de dos dígitos a los alambres de salida.
Por otra parte, los mismos valores binarios se consideran variables de funciones booleanas cuando se expresan en la tabla de verdad o cuando el circuito se implementa con compuertas lógicas. Es importante darse cuenta de que se dan dos interpretaciones diferentes a los valores de los bits que se encuentran en este circuito.
La relación lógica de entrada-salida del circuito sumador completo puede expresarse en dos funciones booleanas, una para cada variable de salida. Cada función booleana de salida requiere un mapa único para su simplificación. Cada mapa debe tener ocho cuadros, ya que cada salida es una función de tres variables de entrada.
Sustractores
La sustracción de dos números binarios puede llevarse a cabo tomando el complemento del sustraendo y agregándolo al minuendo. Por este método, la operación de sustracción, llega a ser una operación de división que requiere sumadores completos para su implementación en máquina. Es posible implementar la sustracción con circuitos lógicos en una forma directa, como se hace con lápiz y papel.
Por este método cada bit sustraendo del número se sustrae de su bit minuendo correspondiente significativo para formar un bit de diferencia. Si el bit minuendo es menor que el bit sustraendo, se toma un 1 de la siguiente posición significativa. El hecho de que se ha tomado un 1 debe llevarse al siguiente par más alto de bit mediante una señal binaria que llega de fuera (salida) de una etapa dada y va a (entrada) la siguiente etapa más alta. En forma precisa así como hay medios sumadores y sumadores completos, hay medio sustractores y sustractores completos.
Medio sustractor
Un medio sustractor es un circuito combinacional que sustrae dos bits y produce su diferencia. También tiene una salida para especificar si se ha tomado un 1. Se designa el bit minuendo por x y el bit sustraendo mediante y. Para llevar a cabo x - y, tienen que verificarse las magnitudes relativas de x y y. Si x > y se tienen tres posibilidades;
0 - 0 = 0, 1 - 0 = 1 y, 1 - 1 = 0.
61

El resultado se denomina bit de diferencia.
Si x < y. tenemos 0 - 1 y es necesario tomar un 1 de la siguiente etapa más alta.
El 1 que se toma de la siguiente etapa más alta añade 2 al bit minuendo, de la misma forma que en el sistema decimal lo que se toma añade 10 a un dígito minuendo. Con el minuendo igual a 2, la diferencia llega a ser 2 - 1 = 1.
El medio sustractor requiere dos salidas. Una salida genera la diferencia y se denotará por el símbolo D. La segunda salida, denotada B para lo que se toma, genera la señal binaria que informa a la siguiente etapa que se ha tomado un 1. La tabla de verdad para las relaciones de entrada-salida de un medio sustractor ahora puede derivarse como sigue:
x y | B D 0 0 0 0 0 1 1 1 1 0 0 1 1 1 0 0
La salida que toma B es un 0 en tanto que x > y. Es un l para x = 0 y y = 1. La salida D es el resultado de la operación aritmética 2B + x - y.
Las funciones booleanas para las dos salidas del medio sustractor se derivan de manera directa de la tabla de verdad,
D = x’ y + x y’ B = x’ y
Es interesante observar que la lógica para D es exactamente la misma que la lógica para la salida S en el medio sumador.
Sustractor completo
Un sustractor completo es un circuito combinacional que lleva a cabo una sustracción entre dos bits, tomando en cuenta que un 1 se ha tomado por una etapa significativa más baja. Este circuito tiene tres entradas y dos salidas. Las tres entradas, x, y y z, denotan al minuendo, sustraendo y a la toma previa, respectivamente. Las dos salidas, D y B, representan la diferencia y la salida tomada, respectivamente.
La tabla de verdad para el circuito es como sigue:
x y z | B D 0 0 0 0 0 0 0 1 1 1 0 1 0 1 1
62
0 1 1 1 0 1 0 0 0 1 1 0 1 0 0 1 1 0 0 0 1 1 1 1 1
Los ocho renglones bajo las variables de entrada designan todas las combinaciones posibles de 1 y 0 que pueden tomar las variables binarias. Los 1 y 0 para las variables de salida están determinados por la sustracción de x - y - z.
Las combinaciones que tienen salida de toma z = 0 se reducen a las mismas cuatro condiciones del medio sumador.
Para x = 0,, y = 0 y z = 1, tiene que tomarse un 1 de la siguiente etapa,
lo cual hace B = 1 y añade 2 a x.
Ya que 2 - 0 - 1 = 1, D = 1.
Para x = 0 y yz = 11, necesita tomarse otra vez, haciendo B = 1 y x = 2.
Ya que 2 - 1 - 1 = 0, D = 0. Para x = 1 y yz = 01, se tiene x - y - z = 0, lo cual hace B = 0 y D = 0. Por último, para x = 1, y = l, z = 1, tiene que tomarse 1, haciendo
B = 1 y x = 3 y, 3 - 1 - 1 = 1, haciendo D = 1.
Conversión de Código
La disponibilidad de una gran variedad de códigos para los mismos elementos discretos de información origina el uso de códigos diferentes por sistemas digitales diferentes. Algunas veces es necesario usar la salida de un sistema como la entrada a otro. Debe insertarse un circuito de conversión entre los dos sistemas si cada uno utiliza códigos diferentes para la misma información. Así que, un convertidor de código es un circuito que hace dos sistemas compatibles aun cuando cada uno use un código binario diferente.
Circuitos NAND de Nivel Múltiple
Los circuitos combinacionales se construyen más a menudo con compuertas NAND o NOR más bien que con compuertas ÁND y OR. Las compuertas NAND y NOR son más comunes desde el punto de vista del hardware, ya que están disponibles en la forma de circuitos integrados.
Debido a la preeminencia de las compuertas NAND y NOR en el diseño de los circuitos combinacionales, es importante tener la capacidad de reconocer las relaciones que existen entre los circuitos construidos con compuertas AND OR y sus diagramas equivalentes NAND o NOR.
63

Circuitos NOR de Niveles Múltiples
La función NOR es la dual de la función NAND. Por esta razón, todos los procedimientos para la lógica NOR forman un dual de los procedimientos y reglas correspondientes desarrollados para la lógica NAND.
En esta sección se enumeran diversos métodos para la implementación y análisis de la lógica NOR por el seguimiento de la misma lista de tópicos usados para la lógica NAND.
7. UNIDAD VII: LOGICA COMBINACIONAL CON MSI Y LSI
CODIFICADORES
Es un circuito combinacional formado por 2 a la n entradas y n salidas cuya función es tal que cuando una sola entrada adopta un determinado valor lógico ( 0 o 1 , según las propiedades del circuito) las salidas representan en binario el número de orden de la entrada que adopte el valor activo.
Los codificadores comerciales construidos con tecnología MSI son prioritarios, esto quiere decir que la combinación presente a la salida será la correspondiente a la entrada activa de mayor valor decimal.
El diseño de un codificador se realiza como el de cualquier circuito combinacional.
CODIFICADOR 74LS148:
Este circuito esta construido con tecnología TTL es un codificador que tiene 8 líneas de entrada y tres de salida. La principal aplicación es la obtención de un código binario a partir de las líneas procedentes de un teclado.
Además de las líneas de entrada y salida de datos, dispone de una entrada de inhibición. Tiene también dos salidas: EO y GS. La primera indica que todas las entradas están a nivel alto; y la segunda nos indica que alguna de las entradas ha sido activada.
MULTIPLEXADORES:
La función de multiplexor consiste en enviar por un solo canal de salida alguna de las informaciones presentes en varias líneas de entrada.
Los circuitos que realizan esta función se llaman Multiplexadores y están formados por N líneas de entrada de informaron, una salida y n entradas de control.
64
La relación entre las entradas de información y las de control es la siguiente:
N=2n
MULTIPLEXADOR 74 LS 151:
Es un circuito de 8 líneas de entrada, tres de selección A,B y C, y una de inhibicion. Dispone también de dos salidas complementarias Y y W.
La entrada d inhibición S a nivel alto fuerza las salidas Y y W a nivel bajo y alto respectivamente, sea cual sea el valor de las entradas de inhibición y de selección.
DECODIFICADORES:
Son circuitos combinacionales de N entradas y un numero de salidas menor o igual a 2n .Básicamente funciona de manera que al aparecer una combinación binaria en sus entradas, se activa una sola de sus salidas (no siempre).
Los codificadores realizan la función inversa a los codificadores. Un decodificador selecciona una de las salidas dependiendo de la combinación binaria presente a la entrada.
DECODIFICADOR 74 LS 48:
Es un circuito construido con tecnología TTL.Tiene 4 líneas de entrada y 10 de salida. Aplicando una combinación BCD a su entrada, activa la correspondiente línea de salida.
Memoria de sólo lectura o ROM
Su nombre viene del inglés Read Only Memory que significa Memoria de Solo Lectura ya que la información que contiene puede ser leída pero no modificada.
En ella se encuentra toda la información que el sistema necesita para poder funcionar correctamente ya que los fabricantes guardan allí las instrucciones de arranque y el funcionamiento coordinado de la computadora. No son volátiles, pero se pueden deteriorar a causa de campos magnéticos demasiados potentes.
Al encender nuestra computadora automáticamente comienza a funcionar la memoria ROM. Por supuesto, aunque se apague, esta memoria no se borra.
El BIOS de una PC (Basic Input Operative System) es una memoria ROM, pero con la facultad de configurarse según las características particulares de cada máquina. esta configuración se guarda en la zona de memoria RAM que posee este BIOS y se mantiene sin borrar cuando se apaga la PC gracias a una pila que hay en la placa principal.
65

Cuando la pila se agota se borra la configuración provocando, en algunos equipos, que la máquina no arranque
Algunas PC tienen la pila soldada a la placa principal por lo que el cambio de la misma lo debe realizar personal técnico, ya que sino se corre el riesgo de arruinar otros componentes.
Su Memoria basada en semiconductores que contiene instrucciones o datos que se pueden leer pero no modificar. En las computadoras IBM PC y compatibles, las memorias ROM suelen contener el software necesario para el funcionamiento del sistema. Para crear un chip ROM, el diseñador facilita a un fabricante de semiconductores la información o las instrucciones que se van a almacenar.
El fabricante produce entonces uno o más chips que contienen esas instrucciones o datos. Como crear chips ROM implica un proceso de fabricación, esta creación es viable económicamente sólo si se producen grandes cantidades de chips. Los diseños experimentales o los pequeños volúmenes son más asequibles usando PROM o EPROM. El término ROM se suele referir a cualquier dispositivo de sólo lectura, incluyendo PROM y EPROM.
66
8. UNIDAD VIII: LOGICA SECUENCIAL
Flip-Flops
Un circuito flip-flop puede mantener un estado binario indefinidamente (Siempre y cuando se le este suministrando potencia al circuito) hasta que se cambie por una señal de entrada para cambiar estados. La principal diferencia entre varios tipos de flip-flops es el número de entradas que poseen y la manera en la cual las entradas afecten el estado binario.
Circuito básico de un flip-flop
Se menciono que un circuito flip-flop puede estar formado por dos compuertas NAND o dos compuertas NOR. Estas construcciones se muestran en los diagramas lógicos de las figuras. Cada circuito forma un flip-flop básico del cual se pueden construir uno mas complicado.
La conexión de acoplamiento intercruzado de la salida de una compuerta a la entrada de la otra constituye un camino de retroalimentación. Por esta razón, los circuitos se clasifican como circuitos secuenciales asincrónicos.
Cada flip-flop tiene dos salidas, Q y Q´ y dos entradas S (set) y R (reset).
Este tipo de flip-flop se llama Flip-Flop RS acoplado directamente o bloqueador SR (SR latch). Las letras R y S son las iniciales de los nombres en inglés de las entradas (reset, set).
Circuito flip-flop básico con compuertas NOR
Para analizar la operación del circuito se debe recordar que la salida de una compuerta NOR es 0 si cualquier entrada es 1 y que la salida es 1 solamente cuando todas las entradas sean 0.
Como punto de partida asúmase que la entrada de puesta a uno (set) es 1 y que la entrada de puesta a 0 (reset) sea 0. Como la compuerta 2 tiene una entrada de 1, su salida Q´ debe ser 0, lo cual coloca ambas entradas de la compuerta 1 a 0 para tener la salida Q como 1.
Cuando la entrada de puesta a uno (set) vuelva a 0, las salidas permanecerán iguales ya que la salida Q permanece como 1, dejando una entrada de la compuerta 2 en 1.
Esto causa que la salida Q´ permanezca en 0 lo cual coloca ambas entradas de la compuerta número 1 en 0 y así la salida Q es 1.
De la misma manera es posible demostrar que un 1 en la entrada de puesta a cero (reset) cambia la salida Q a 0 y Q´ a 1.
67
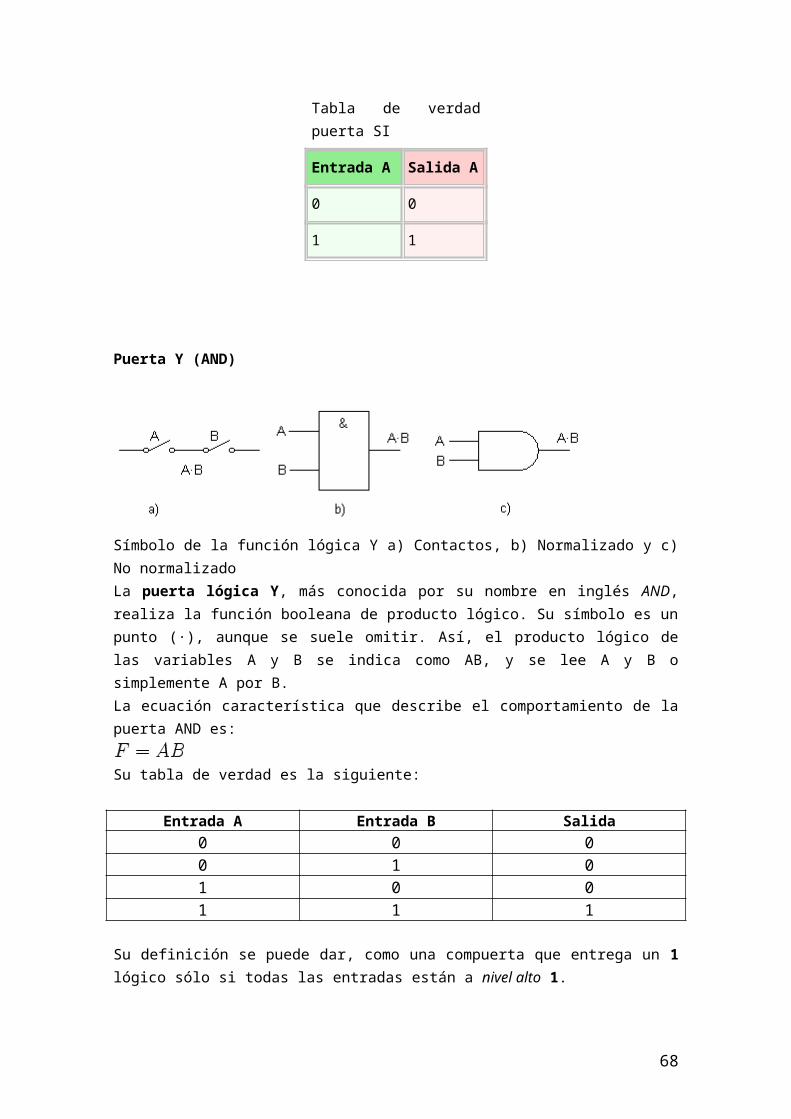
Cuando la entrada de puesta a cero cambia a 0, las salidas no cambian.
Cuando se aplica un 1 a ambas entradas de puesta a uno y puesta a cero ambas salidas Q y Q´ van a 0. Esta condición viola el hecho de que las salidas Q y Q´ son complementos entre si. En operación normal esta condición debe evitarse asegurándose que no se aplica un 1 a ambas entradas simultáneamente.
Un flip-flop tiene dos entradas útiles. Cuando Q=1 y Q´=0 estará en el estado de puesta a uno (o estado 1). Cuando Q=0 y Q´=1 estará en el estado de puesta a cero (o estado 0). Las salidas Q y Q´ son complementos entre si y se les trata como salidas normales y de complemento respectivamente. El estado binario de un flip-flop se toma como el valor de su salida normal.
Bajo operación normal, ambas entradas permanecen en 0 a no ser que el estado del flip-flop haya cambiado. La aplicación de un 1 momentáneo a la entrada de puesta a uno causará que el flip-flop vaya a ese estado.
La entrada de puesta en uno debe volver a cero antes que se aplique un uno a la entrada de puesta a cero. Un 1 momentáneo aplicado a la entrada de puesta a cero causará que el flip-flop vaya al estado de borrado (o puesta a cero).
Cuando ambas entradas son inicialmente cero y se aplica un 1 a la entrada de puesta a uno o se aplica un 1 a la entrada de puesta a cero mientras que el flip-flop este borrado, quedaran las salidas sin cambio.
Cuando se aplica un 1 a ambas entradas de puesta a uno y puesta a cero, ambas salidas irán a cero. Este estado es indefinido y se evita normalmente. Si ambas salidas van a 0, el estado del flip-flop es indeterminado y depende de aquella entrada que permanezca por mayor tiempo en 1 antes de hacer la transición a cero.
Circuito flip-flop básico con compuertas NAND
El circuito básico NAND de la figura anterior opera con ambas entradas normalmente en 1 a no ser que el estado del flip-flop tenga que cambiarse.
La aplicación de un 0 momentáneo a la entrada de puesta a uno, causará que Q vaya a 1 y Q´ vaya a 0, llevando el flip-flop al estado de puesta a uno.
Después que la entrada de puesta a uno vuelva a 1, un 0 momentáneo en la entrada de puesta a cero causará la transición al estado de borrado (clear).
Cuando ambas entradas vayan a 0, ambas salidas irán a 1; esta condición se evita en la operación normal de un flip-flop.
68

Flip-flop RS temporizado
El flip-flop básico por si solo es un circuito secuencial asincrónico. Agregando compuertas a las entradas de circuito básico, puede hacerse que el flip-flop responda a los niveles de entrada durante la ocurrencia del reloj.
El flip-flop RS temporizado consiste en un flip-flop básico NOR y dos compuertas NAND. Las salidas de las dos compuertas AND permanecen en cero mientras el pulso del reloj (abreviado en inglés CP) sea 0, independientemente de los valores de entrada S y R se permite llegar al flip-flop básico.
El estado de puesta a uno se logra con S=1, R=0 y CP=1. Para cambiar el estado de puesta a cero (o borrado) las entradas deben ser S=0, R=1 y CP=1. Con S=1 y R=1, la ocurrencia de los pulsos de reloj causará que ambas salidas vayan momentáneamente a 0.
Cuando quite el pulso, el estado del flip-flop será indeterminado, es decir, podría resultar cualquier estado, dependiendo de si la entrada de puesta a uno o la de puesta a cero del flip-flop básico, permanezca el mayor tiempo, antes de la transición a 0 al final del pulso.
Flip-flop RS temporizado
El flip-flop RS sincronizado tiene tres entradas: S, R y CP. La entrada CP se reconoce fácilmente por un pequeño triángulo.
El triángulo es un símbolo para el indicador dinámico y denota el hecho que el flip-flop responde a una transición del reloj de entrada o flanco de subida de una señal de un nivel bajo (o binario) a un nivel alto (1 binario).
Las salidas del flip-flop se marcan con Q y Q´ dentro de un recuadro. Se le puede designar al flip-flop un nombre de variable diferente aunque se escriba una Q dentro del recuadro. En este caso la letra escogida para la variable del flip-flop se marca por fuera del recuadro y a lo largo de la línea de salida.
El estado del flip-flop se determina del valor de su salida normal Q. Si se desea obtener el complemento de salida normal, no es necesario usar un inversor ya que el valor complementado se obtiene directamente de la salida Q´.
Q es el estado binario del flip-flop en un tiempo dado (refiriéndose al estado presente), las columnas S y R dan los valores posibles de las entradas y Q(t + 1) es el estado del flip-flop después de la ocurrencia de un pulso de reloj (refiriéndose al siguiente estado).
La ecuación característica de una expresión algebraica para la información binaria de la tabla característica. Los dos estados indeterminados se marcan con una X en el mapa, ya que pueden resultar como 1 o como 0.
69
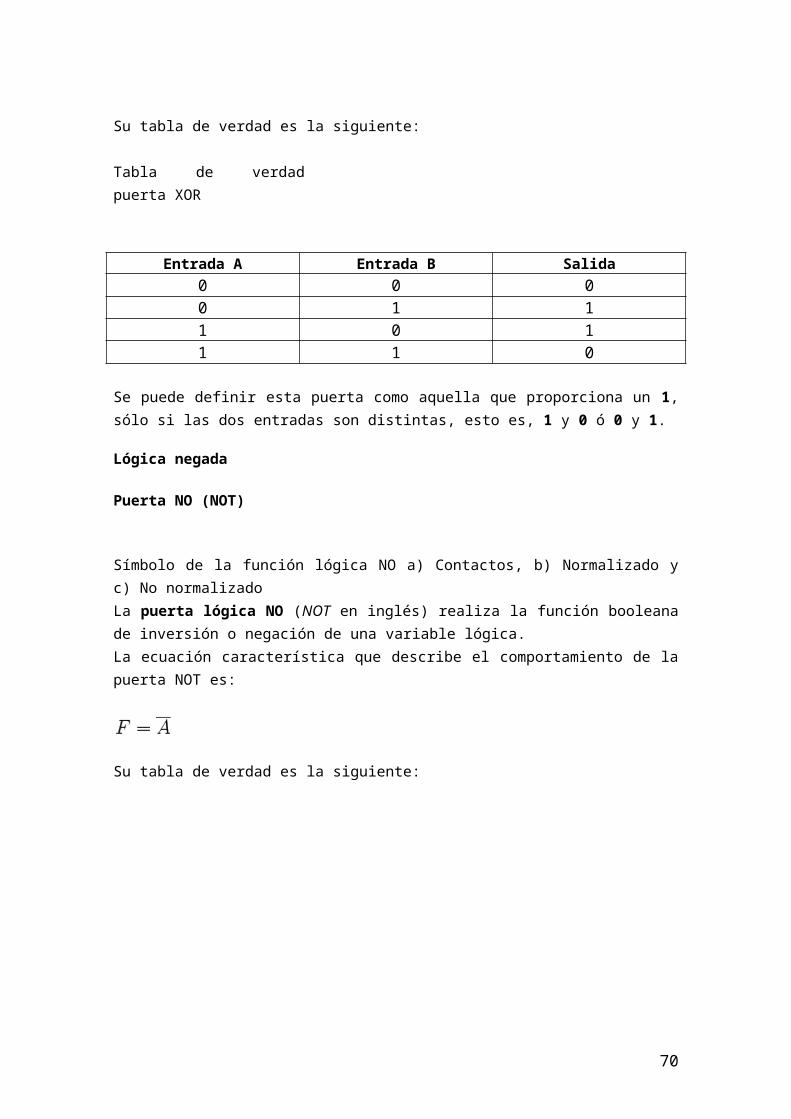
Sin embargo la relación SR=0 debe incluirse como parte de la ecuación característica para especificar que S y R no pueden ser iguales a 1 simultáneamente.
Flip-flop D
El flip-flop D mostrado en la figura anterior es una modificación del flip-flop RS sincronizado. Las compuertas NAND 1 y 2 forman el flip-flop básico y las compuertas 3 y 4 las modifican para conformar el flip-flop RS sincronizado.
La entrada D va directamente a la entrada S y su complemento se aplica a la entrada R a través de la compuerta 5. Mientras que el pulso de reloj de entrada sea un 0, las compuertas 3 y 4 tienen un 1 en sus salidas, independientemente del valor de las otras entradas.
Esto está de acuerdo a los requisitos de que las dos entradas del flip-flop básico NAND permanezcan inicialmente en el nivel de 1. La entrada D se comprueba durante la ocurrencia del pulso de reloj. Si es 1, la salida de la compuerta 3 va a 0, cambiando el flip-flop al estado de puesta a uno (a no ser que ya este en ese estado). Si en 0, la salida de la compuerta 4 va a 0, cambiando el flip-flop al estado de borrado.
Flip-flop D temporizado
El flip-flop tipo D recibe su nombre por la habilidad de transmitir "datos" a un flip-flop. Es básicamente un flip-flop RS con un inversor en la entrada R. el inversor agregado reduce el numero de entradas de dos a uno.
Este tipo de flip-flop se llama algunas veces bloqueador D con compuertas o flip-flop de bloqueo. La entrada CP se le da a menudo la designación variable G (de gate) para indicar que esta entrada esta habilita el flip-flop de bloqueo para hacer posible que los datos entren al mismo.
El símbolo para el flip-flop D sincronizado se muestra en la figura. La tabla característica se lista en la parte (c) y la ecuación característica se lista en la parte (d). la ecuación característica muestra que el siguiente estado del flip-flop es igual a la entrada D y es independiente del valor del presente estado.
Flip-flop JK
Un flip-flop JK es un refinamiento del flip-flop RS ya que el estado independiente del termino RS se define en el tipo JK. Las entradas J y K se comportan como las entradas R y S para poner a uno o cero (set o reset) al flip-flop (nótese que en el flip-flop JK la entrada J se usa para la entrada de puesta a uno y la letra K para la entrada de puesta a cero). Cuando ambas entradas se aplican a J y K simultáneamente, el flip-flop cambia a su estado de complemento, esto es, si Q=1 cambia a Q=0 y viceversa.
70

Un flip-flop sincronizado se muestra en la figura anterior. La salida Q se aplica con K y CP a una compuerta AND de tal manera que el flip-flop se ponga a cero (clear) durante un pulso de reloj solamente si Q fue 1 previamente.
De manera similar la salida Q´ se aplica a J y CP a una compuerta AND de tal manera que el flip-flop se ponga a uno con un pulso de reloj, solamente si Q´ fue 1 previamente.
Flip-flop JK temporizado
Como se muestra en la tabla característica de la figura, el flip-flop JK se comporta como un flip-flop RS excepto cuando J y K sean ambos 1.
Cuando J y K sean 1, el pulso de reloj se transmite a través de una compuerta AND solamente; aquella cuya entrada se conecta a la salida del flip-flop la cual es al presente igual a 1.
Así, si Q=1, la salida de la compuerta AND superior se convertirá en 1 una vez que se aplique un pulso de reloj y el flip-flop se ponga a cero. Si Q´=1 la salida de la compuerta AND se convierte en 1 y el flip-flop se pone a uno. En cualquier caso, el estado de salida del flip-flop se complementa.
Las entradas en el símbolo gráfico para el flip-flop JK deben marcarse con una J (debajo de Q) y K (debajo de Q´). La ecuación característica se da en la figura y se deduce del mapa de la tabla característica.
Nótese que debido a la conexión de retroalimentación del flip-flop JK, la señal CP que permanece en 1 (mientras que J=K=1) causará transiciones repetidas y continuas de las salidas después que las salidas hayan sido completadas.
Para evitar esta operación indeseable, los pulsos de reloj deben de tener un tiempo de duración que es menor que la demora de propagación a través del flip-flop. Esta es una restricción, ya que la operación del circuito depende del ancho de los pulsos.
La restricción del ancho del pulso puede ser eliminada con un maestro esclavo o una construcción activada por flanco de la manera discutida en la siguiente sección. El mismo razonamiento se aplica al flip-flop T presentado a continuación.
Flip-Flop T temporizado
El flip-flop T es la versión de una entrada, del flip-flop JK. El nombre T se deriva de la habilidad del flip-flop de variar ("toggle") o cambiar estado. Independientemente del presente estado del flip-flop, este asume el estado de complemento cuando ocurre el pulso de reloj mientras que la entrada T esté en lógica 1.
Los flip-flops introducidos en esta sección son los de tipo más común comercialmente. Los procedimientos de análisis y diseño desarrollados en este capitulo se aplican a cualquier flip-flops sincronizado una vez que se haya definido su tabla característica.
71

72

9. UNIDAD IX: REGISTROS CONTADORES Y UNIDAD DE MEMORIA
Registros y contadores
RegistrosLos registros son circuitos secuenciales conectados por una serie de biestables
conectados en cascada. Tienen diversas aplicaciones prácticas como:
Transmitir y recibir datos en serie y en paralelo. Conversión de datos en formato serie y paralelo y viceversa. Almacenamiento de información (memoria)
Tipos de registros:
Registros de desplazamiento ENTRADA SERIE – SALIDA SERIE. Es el registro más sencillo, en el que recibimos la información en serie e y en la salida obtenemos también en serie, pero retardad tantos ciclos de reloj como número de biestables compongan el registro. Funcionan de la siguiente forma, partiendo de que en el inicio todos los biestables están reseteados Q=0, en el primer flanco de subida de la señal de reloj (o bajada, dependiendo del biestable), el contenido de la entrada del primer biestable pasa a la su salida que es a su vez la entrada del segundo biestable. Este tipo de registro se suele usar como unidad de retardo.
Registros de desplazamiento ENTRADA SERIE – SALIDA PARALELO. En este tipo de registros, la información se recibe en serie y la salida la obtenemos en paralelo, una vez transcurridos tantos ciclos de reloj como biestables compongan el registro. Las salidas Q están conectadas a las entradas del biestable y a su vez a la salida en paralelo, el funcionamiento es igual que el anterior pero dependiendo del número de biestables y al terminar el ciclo de reloj, tememos una salida de tantos bits en paralelo como número de biestables.
Registros de desplazamiento ENTRADA PARALELO – SALIDA SERIE. En este tipo de registro, la información es introducen en el registro en paralelo simultáneamente en todos los biestables, por el contrario, la salida de los bits se obtienen en serie, una vez transcurridos tantos ciclos de reloj como número de biestables compongan el registro. Se realizan conjugando con un circuito combinacional y otra entrada que llamamos Shift/Load con una entrada directa y otra invertida, cuando se producen un flanco activo de reloj, se produce un paso de las entradas al registro de datos a través del c. Combinacional, cuando está a nivel alto, las puertas permiten el desplazamiento en serie hacia la derecha de los bits almacenados., Produciéndose la salida de todos los datos una vez transcurridos los ciclos de reloj, es útil a la hora de convertir datos paralelos a serie para poderlos enviar por un cable.
73

Registros de desplazamiento ENTRADA PARALELO – SALIDA PARALELO. En este tipo de registros la información si introducida simultáneamente en los biestables paralelo y cuando se producen un flanco activo de la señal de reloj, los datos se obtienen también a la salida en paralelo.
Registro UNIVERSAL. Existe un circuito en el mercado que se denomina Registro Universal XX194, ya que permite todos los tipos de registros de desplazamiento que hemos estudiado. Para seleccionar el modo de funcionamiento, dispone de dos líneas de control que van conectadas a un multiplexor, estas líneas de control seleccionan la forma de conectar los biestables y así funcionar de una forma u otra.
Contadores
Los contadores son circuitos secuenciales cuya salida representa el número de impulsos que se la aplica a la entrada de reloj. Está formado básicamente por biestables interconectados. Pueden contar de forma ascendente si su contenido se incrementa con cada impulso o si decrementa, aunque por lo general los contadores pueden realizar esta función de ambas maneras según el estado de una entrada. Las aplicaciones de los contadores son las siguientes:
Relojes y temporizadores Divisores de frecuencia. Frecuencímetros.
Según la forma de conectar la señal de reloj, los contadores pueden clasificarse en asíncronos y síncronos.
Contadores Asíncronos:
En este tipo, la señal de reloj se conecta sólo al primer biestable, mientras que las otras entradas se conectan a la salida del biestable anterior. El conectarse de esta forma la señal de reloj provoca que todos los biestables no cambien de estado al mismo tiempo, por ello reciben el nombre de asíncronos.
Las salidas pueden atacar a un display visualizador de siete segmentos, por ejemplo. Su funcionamiento es el siguiente, se parte de que todos los flip-flops están reseteados, cuando se produce un flanco activo de la señal de reloj, las salidas del primer biestable cambian Q=0 y Q’=1, Q’ conectada a la señal de reloj del segundo biestable, produce un flaco activo, cambiando el segundo biestable el estado de sus salidas, este proceso se produce de forma indefinida a lo largo de los biestables.
Podemos realizar un contador descendente si lo que conectamos a la señal de reloj es la salida Q y no Q’. El asíncrono además de indicar el número de impulsos de señal recibidos puede dividir la frecuencia de la señal de reloj.
74

Como ejemplo la salida de la señal del primer flip-flop tiene la mitad de frecuencia que la salida de señal de reloj original, la salida del segundo flip-flop, una frecuencia 4 veces menor, así sucesivamente obteniendo divisiones en cada salida múltiplos de 2.
El inconveniente de este divisor de frecuencias viene dado por el tiempo de propagación de la señal, que hace que si cambiamos el estado del primer biestable deben cambiar de estado éste y el siguiente, provocando que la señal de reloj tenga un retardo al bascular.
Si se conectan más, el tiempo de espera que corresponde con el tiempo de propagación, aumenta, lo que limita la frecuencia de funcionamiento del contador. Esta frecuencia máxima viene determinada por la siguiente fórmula F< 1/n.tp (tp= tiempo de propagación y n= número de biestables).
Ampliación de contadores asíncronos:
El método para conseguir contadores asíncronos de más bits consiste en conectar en cascada tantos biestables como número de bits que queramos que tenga el contador., llevando la señal de reloj externa al primero de3 ellos y la salida de cada biestable a la entrada del reloj siguiente.
El número máximo de estados por los que pasa un contador se denomina módulo del contador. Este número viene determinado por la expresión 2^n donde n indica el número de bis del contador.
Ejemplo, un contador de módulo 4 pasa por 4 estados, y contaría del 0 al 3. Si necesitamos un contador con un módulo distinto de 2^n, lo que haremos es añadir un circuito combinacional (puerta NAND) cuyas entradas sean las salidas a 1 del contador, y añadir la salida del circuito a todas las entradas CLEAR de los biestables.
Contadores síncronos:
En este tipo de biestables, la señas de reloj externa se conecta a todos los biestables. Con ello se consigue que todos los biestables evolucionen a la vez, y por lo tanto no se produzcan tiempos de retardo ni transitorios. Para conseguirlo hay que añadir una lógica combinacional para implementarla en el contador, mientras que los biestables hacen de memoria para saber en qué estado se encuentra, la lógica combinacional se encargará de calcular cual será el siguiente estado al que debe pasar el contador.
Diseño de un contador síncrono:
El diseño de un contador síncrono debe pasar por varias fases de diseño:
1. Dibujar el diagrama de estados. Se representa en él la forma simbólica del funcionamiento del sistema, representando los estados que deseamos y las transiciones precisas.
75
2. Realizar la tabla simbólica de transiciones. Es otra forma de representar el anterior diagrama de estados, y está compuesta por dos columnas, la de estado actual (estado en el que se encuentra el sistema) y estado futuro (el estado que pretendemos que evolucione el sistema).
3. Realizar la tabla de codificación de estados. Se trata de codificarlo en binario, el número de biestables del sistema depende del número de estados del mismo. Por ejemplo, si queremos un contador de 8 estados (módulo 8) siguiendo la relación N=2^n; n=log(2)N, serían necesarios 3 biestables para codificar los estados del contador. 7(10)=111(2) son tres bits, por lo tanto necesitamos 3 biestables. Pasamos a binario tanto el estado actual como el estado futuro y cada bit de salida es una salida de un biestable.
4. Crear una tabla de transiciones codificada. Tiene dos columnas al igual que la tabla simbólica de transiciones, pero ya codificada en binario. El estado actual representa el valor de la salida de los biestables (salida Q) y el estado futuro representa el valor de la salida que deben tomar Q en el siguiente flanco activo, denominándose Q+.
5. Realización de las tablas de excitación. Para conseguir que un biestable pase de un estado actual a un estado futuro, es preciso aplicarle la excitación conveniente a sus entradas. Para ello se aplican tablas de excitación, que son las tablas de verdad de los biestables pero vistas a la inversa, es decir, la entrada en función de la salida. Como ejemplo ponemos la tabla de excitación de los biestables J-K y D.
6.
FLIP-FLOP J-K FLIP-FLOP DQ Q+ J K Q Q+ D0 0 0 X 0 0 00 1 1 X 0 1 11 0 X 1 1 0 01 1 X 0 1 1 1
7. Obtención del circuito combinacional necesario, simplificación e implementación. Una vez obtenida la tabla de excitación del contador síncrono, el problema se reduce al obtener las funciones de las excitaciones, utilizando para ello Karnaugh. Una vez obtenidas las funciones, se puede implementar el circuito, conectado las salidas Q a las entradas de los siguientes biestables a través del combinacional.
76
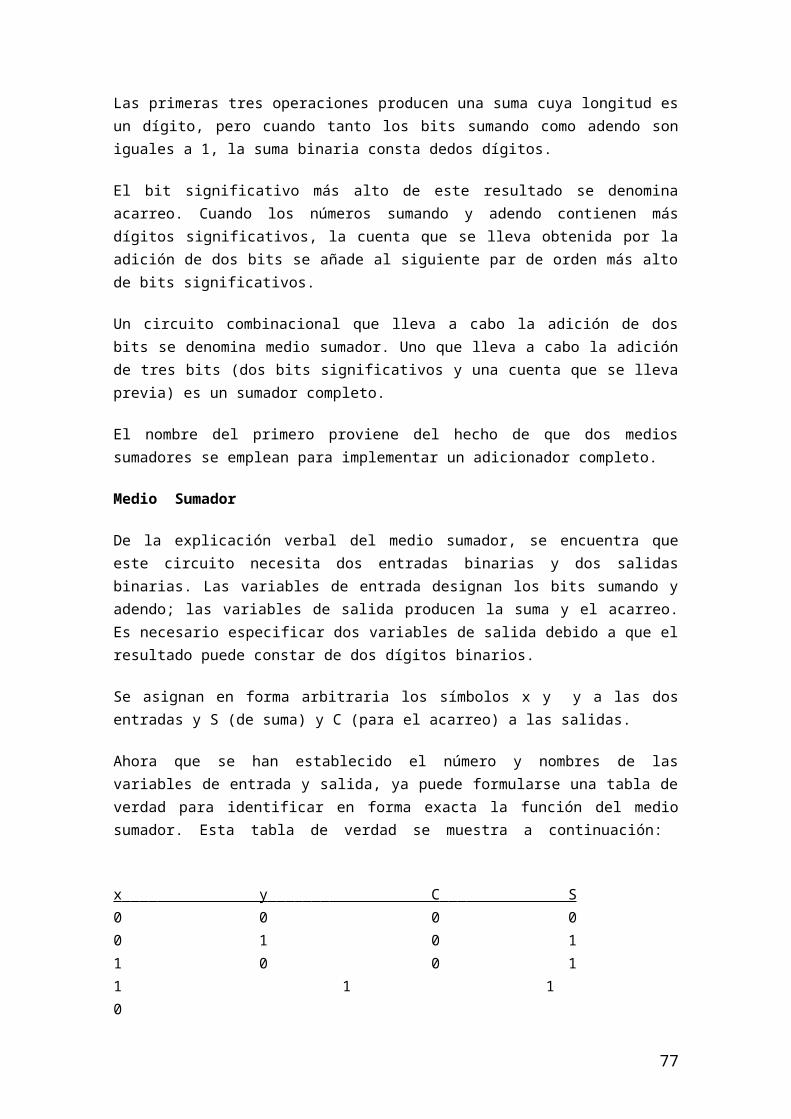
Secuencias de tiempo
Los contadores tienen un papel importante en el funcionamiento del computador al igual que en otros sistemas digitales.
La secuencia de las operaciones en un sistema digital se produce en la unidad de control. La unidad de control que superviza las operaciones en un sistema digital consistiría normalmente en señales de tiempo que determinan la secuencia de tiempo en la cual se ejecutan las operaciones. Las secuencias de tiempo en la unidad de control pueden generarse fácilmente por medio de contadores o registros de desplazamiento. Esta sección demuestra el uso de estas funciones en la generación de señales de tiempo para la unidad de control.
Secuencias de tiempo de un microprocesador.
Ejemplos
1. Lectura de código de instrucción
2. Lectura y escritura de memoria
77
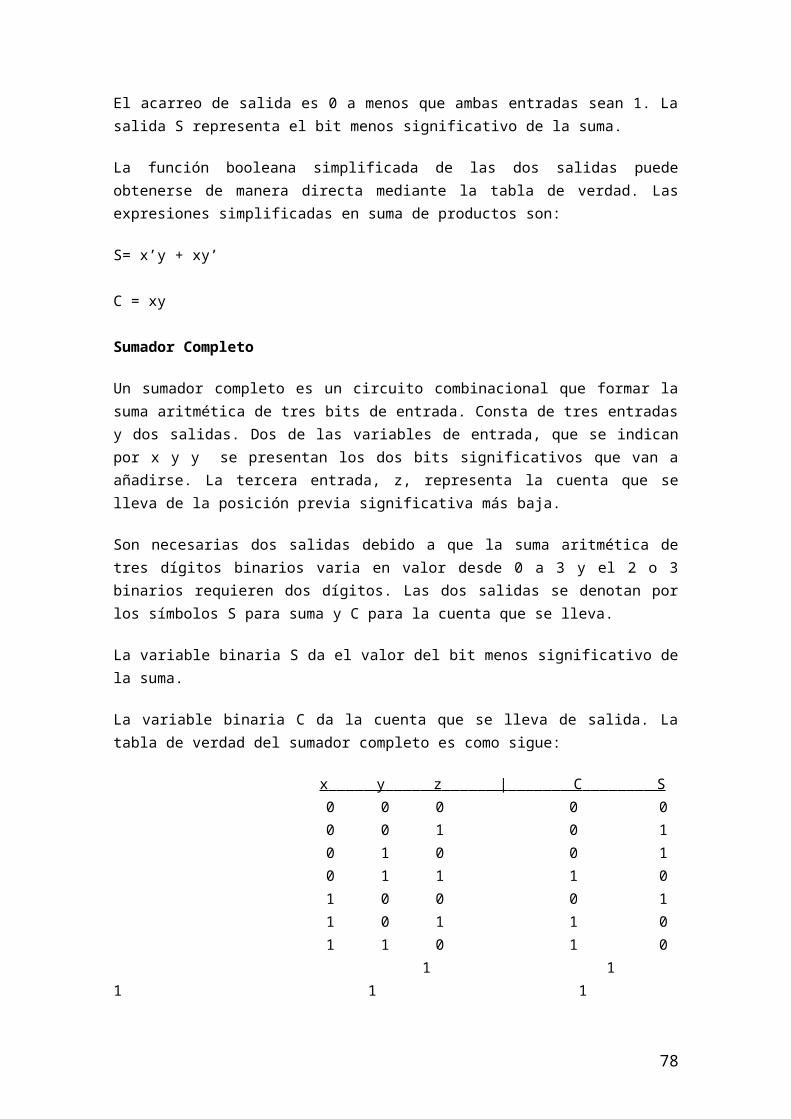
78

BIBLIOGRAFÍA.-
Bibliografía Básica
1. Morris Mano Lógica digital y diseño de computadoras.2. Tietze – Schenk Técnica de circuitos semiconductores.3. Horowitz – Hill The art of electronics. I y II
LECTURAS COMPLEMENTARIAS
1. Tossi Ronald J. Sistemas Digitales2. Hill Federico Teoría de Conmutación y Diseño Lógico3. Andrew S. Tanenbaum Redes de Computadores
79

GLOSARIO
BIT. Bit es el acrónimo de Binary digit. (dígito binario). Un bit es un dígito del sistema de numeración binario
LATCH. Trad. Ingles Chapa, seguro. Un latch es un circuito electrónico usado para almacenar información en sistemas lógicos asíncronos. Un latch puede almacenar un bit de información
GATE. Trad. Ingles Puerta. Se utiliza como compuerta lógica en contexto de Sistemas Digitales.
PCM (PULSE CODE MODULATION). Conversión de analógica a un código digital. La señal analógica se muestrea, es decir, se mide periódicamente. En un convertidor analógico / digital, los valores medidos se cuantifican, se convierten en un número binario y se descodifican en un tren de impulsos. Este tren de impulsos es una señal de alta frecuencia portadora de la señal analógica Modulación por código de impulsos.- Es un proceso digital de modulación para convertir una señal original.
PCM BINARY CODE. Código binario PCM.- Un código de impulsos en el que los valores cuantificados son identificados por números tomados en orden. Este término no debe emplearse para transmisión por líneas.
PCM MULTIPLEX EQUIPMENT. Equipo múltiplex PCM.- Un equipo para derivar una señal digital simple, a una velocidad de dígitos definida, de dos o más canales analógicos mediante una combinación de modulación por código de impulsos y un multiplexado por división de tiempo (multiplexor) y también para realizar la función inversa (demultiplexor). La descripción debe ir seguida de una velocidad de dígitos binarios equivalente; p. Ej., equipo múltiplex PCM de 2.048 kbit/s.
80