dossier ingenieria de sistemas ivirtual.usalesiana.edu.bo/.../dossier/22012/1666.docx · web viewde...
TRANSCRIPT


CAPÍTULO I INGENIERÍA DE SISTEMAS I
TEORÍA GENERAL DE SISTEMAS
Frecuentemente se emplea el término sistema en diferentes usos. Veremos en este capítulo los conceptos de sistemas que constituyen una manera de pensar de gran utilidad para la investigación y comprensión de una amplia variedad de materias y problemas. Ayudará a aclarar la Teoría General de Sistemas, pero para ello se precisa de una Teoría de Sistemas, que aporta con un conjunto de rasgos que se puede distinguir en determinados objetos cuando se considera como sistema.
1.1. INTRODUCCIÓN
Frecuentemente se emplea el término sistema en diferentes usos, por ejemplo se hace
referencia a: Sistema eléctrico, Sistema mecánico, Sistema Social, sistema Solar, Sistema
circulatorio, Sistema económico, Sistema Educacional, etc.
Los conceptos de sistemas constituyen una manera de pensar, una forma de ver las cosas
que resulta de gran utilidad para la investigación y comprensión de una amplia variedad de
materias y disciplinas. Pero no constituyen una herramienta para la resolución directa de
problemas, de modo que no deben considerarse como recetas prácticas para obtener
excelentes resultados en corto tiempo, sino como una infraestructura de conocimientos
básicos a partir de la cual sea más clara y profunda la comprensión de problemas y
situaciones complejas, especialmente aquellas que resultan, como es el objeto de este
curso, de la aplicación de computadores a la resolución de problemas de información en la
administración.
1.2. HISTORIA
Según algunos autores nos indican lo siguiente:
VON BERTALANFFY.- Bertalanffy establece por primera vez el pensamiento de sistemas
como un movimiento científico importante, a través de sus formulaciones relacionadas con el
concepto de sistema abierto.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
2

El biólogo Bertalanffy sostenía que " el problema fundamental de la biología moderna es el
descubrimiento de leyes de sistemas biológicos donde hay subordinación de las partes y los
procesos componentes"
Posteriormente Bertalanffy intenta desarrollar un conjunto de conceptos teóricos basados en
una matemática simplificada de sistemas basados asimismo en la presunción de su
aplicabilidad a varias esferas de la experiencia, sosteniendo que las mismas pueden
culminar en una unificación de las ciencias. La creencia del isomorfismo es central en su
pensamiento.
1.3. CONCEPTOS DE SISTEMAS
Al referirnos normalmente a un “sistema” asociamos las ideas de un conjunto de elementos
o partes que interactúan entre si, además a menudo implícitamente le agregamos un objetivo
y una función específica del sistema. Así hablamos de : sistema de frenos, sistema
educacional, sistema de información, etc.
Implícitamente el término "sistema" fue conocido por Aristóteles con su famoso enunciado "El
todo es más que la suma de las partes" y a lo largo de la historia el movimiento de los
sistemas tuvo contribuciones importantes hasta concebir toda una teoría de sistemas. Hoy
en día el término sistema es utilizado con mucha frecuencia en diferentes ámbitos tanto
técnicos, económicos, políticos o sociales.
Sin embargo, por su generalidad, múltiple aplicación y por ser un concepto abstracto, este
término es manejado sin considerar su connotación general y organización interna coherente
que el sistema deberá mantener en continua regulación y adaptación para su supervivencia.
1.3.1. DEFINICION DE SISTEMA
Es un conjunto organizado de cosas o partes interactuantes e interdependientes, que se
relacionan formando un todo unitario y complejo.
Cabe aclarar que las cosas o partes que componen al sistema, no se refieren al campo físico
(objetos), sino mas bien al funcional. De este modo las cosas o partes pasan a ser funciones
básicas realizadas por el sistema. Podemos enumerarlas en: entradas, procesos y salidas.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
3

Hall define sistema como "Conjunto de objetos (partes) y sus relaciones". Esta definición
ampliamente aceptada, añade a un simple conjunto o reunión el aditamento que une a sus
componentes o partes que lo diferencia de una simple reunión.
1.4. DIFERENCIA ENTRE SISTEMA Y CONGLOMERADO
Supongamos que nuestro universo está compuesto de objetos. Objeto, según el diccionario
es todo aquello que ocupa un lugar en el espacio. Sin embargo, queremos introducir también
en nuestro universo lo intangible, es decir, precisamente aquello que no ocupa un lugar en
el espacio (como el pensamiento), pero si con el tiempo. De ahí que utilizaremos como
definición de objeto aquella que señala que constituyen objetos todo aquello que ocupa un
lugar en el espacio y/o en el tiempo.
Todos los objetos (así definidos) que constituyen nuestro universo material y espiritual
podemos dividirlo en dos grandes grupos, a uno denominaremos sistemas y el segundo
conglomerado o suma. Podemos definir a los sistemas como aquellos objetos compuestos
de partes que interactúan entre sí. Partes que se interrelacionan, formando una totalidad. Un
conglomerado es un objeto compuesto por partes que no interactúan entre ellas.
Simplemente son partes sumadas que también forman un todo.
Ejemplo de sistema puede ser :
el sistema solar
el cuerpo humano
el motor de un automóvil
una empresa o grupo social
El corazón
Ejemplo de Conglomerado puede ser
Un saco de manzanas.
El grupo humano que ocupa, en un momento del día un
minibús que viene de la ciudad de El Alto hacia el Centro
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
4

de La Paz
La suma de espectadores en un partido de fútbol
De este último ejemplo podemos extraer ilustración de la diferencia entre estos conceptos.
Decíamos que los espectadores (supongamos, para simplificar que sean individualmente
aislados y desconocidos unos de otros) forman un conglomerado. Sin embargo, los 22
jugadores, el árbitro y los dos jueces de línea, no son un conglomerado, ellos forman parte
de un sistema. ¿Cuál es la diferencia? Evidentemente que es la interacción entre ellos. Si
observamos la conducta de los espectadores, veremos fácilmente que responden a ciertos
patrones fijos. Prenderán cigarrillos (los que fuman), gritarán de alegría cuando su equipo
logre marcar un gol (o al menos manifestarán una conducta demostrando su gratificación).
Se disgustarán frente a una actitud equivocada del árbitro (por lo menos los partidarios del
equipo damnificado). Podemos, entonces, fácilmente observar a algunos de ellos (una
muestra representativa) y proyectar la conducta que desarrollarán los espectadores durante
el partido.
Otro aspecto que creemos conveniente presentar es el siguiente hecho. Supóngase que
durante el entretiempo, uno de los hinchas de uno de los equipos reúne a otros hinchas de
ese mismo club y juntos organizan una “barra”. El les enseña ciertos gritos de guerra y les
indica que cuando él se pare y se vuelva hacia ellos, todos griten o aviven, en conjunto a su
equipo, siguiendo un cierto esquema u orden de “gritos de guerra”. Cuando esto sucede lo
que está pasando es que el conglomerado (los hinchas dispersos e individualizados) se han
reunido para llevar a cabo una cierta interacción con un objetivo bien determinado. Aún más,
han reglamentado la forma de interactuar. Ya no podemos hablar de conglomerado humano,
sino de un sistema humano. De ahí podemos concluir, que un conglomerado puede
convertirse de acuerdo a las circunstancias, en un sistema.
1.5. SUBSISTEMA
Un conjunto del sistema. Los elementos del sistema pueden a su vez agruparse en
subsistemas.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
5

1.6. ELEMENTO
Partes del sistema que no admiten descomposición ya que no interesa obtener o definir esa
descomposición.
1.7. GRADO DE RESOLUCION
El nivel a que se llega descomponiendo un sistema en subsistema y elementos está dado
por la naturaleza del estudio que se desea realizar.
1.8. MEDIO AMBIENTE (ENTORNO) DE UN SISTEMA
Es el conjunto de elementos (con sus propiedades y relaciones), que no forman parte del
sistema pero que pueden interactuar con él, es decir, tales que algún cambio en ellos pueda
afectar alguna característica relevante del sistema en estudio.
Así, aquellos elementos externos que solo puedan influir sobre características o propiedades
no relevantes del sistema, no forma parte de su medio ambiente.
1.9. ESTADO DE UN SISTEMA
Es el conjunto de valores que toman las propiedades relevantes del sistema en un instante
dado. Todo sistema posee un número ilimitado de propiedades, pero sólo algunas de ellas
son interesantes para un estudio o investigación científica.
De este modo, un mismo sistema puede presentar un distinto conjunto de propiedades
relevantes, dependiendo del propósito del estudio.
1.10. ESTADO DEL MEDIO AMBIENTE DE UN SISTEMA
Es el conjunto de valores que toman sus propiedades relevantes en un momento dado,
entendiéndose por propiedades relevantes del medio ambiente aquellas que pueden afectar
de alguna manera a las propiedades relevantes del sistema.
Así, sucede que nuestro sistema en estudio tiene propiedades relevantes que nos interesan,
y el medio ambiente propiedades relevantes que no nos interesan en sí mismas (nuestro
estudio es del sistema, no del medio ambiente), sino en tanto afectar a nuestro sistema.
Pero, en la medida que esas influencias externas sean mayores, pueden llegar a
interesarnos en sí mismas, con lo cual estaremos conceptualizando como un solo sistema al
conjunto formado por los elementos del medio ambiente y el sistema original.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
6

El sistema acciona sobre el medio, afectándolo en alguna forma.
Las acciones que efectúa el medio ambiente sobre el sistema se denominan entradas o
estímulos, las que el sistema ejerce sobre el medio, salidas.
Las salidas pueden tener características diversas según la forma en que se originan.
Una reacción de un sistema es una salida o un cambio de estado que se produce debido a
algún estímulo dado. En otras palabras, dicho estímulo es suficiente para causar la reacción.
Una respuesta de un sistema es una salida o un cambio de estado para cuya ocurrencia es
necesaria, pero no suficiente, la existencia de algún estímulo. Debe existir además una
colaboración del sistema mismo, esto es, si el estímulo está acompañado de un estado
apropiado del sistema, la respuesta se produce. Si el estado no es apropiado, la respuesta
no es tal.
1.11. COMPORTAMIENTO DE UN SISTEMA
Es la respuesta de un sistema ante estímulos externos. Las respuestas dependen del
estado del sistema y del estímulo recibido. El estado del sistema depende de su estructura
interna y de la historia de estímulos recibidos.
1.12. CARACTERÍSTICAS DE LOS SISTEMAS
Propósito u objetivo: todo sistema tiene uno o algunos propósitos. Los elementos
(u objetos), como también las relaciones, definen una distribución que trata siempre
de alcanzar un objetivo.
Globalismo o totalidad: un cambio en una de las unidades del sistema, con
probabilidad producirá cambios en las otras. El efecto total se presenta como un
ajuste a todo el sistema. Hay una relación de causa/efecto. De estos cambios y
ajustes, se derivan dos fenómenos: entropía y homeostasia.
Entropía: es la tendencia de los sistemas a desgastarse, a desintegrarse, para el
relajamiento de los estándares y un aumento de la aleatoriedad. La entropía
aumenta con el correr del tiempo. Si aumenta la información, disminuye la entropía,
pues la información es la base de la configuración y del orden. De aquí nace la
negentropía, o sea, la información como medio o instrumento de ordenación del
sistema.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
7

Homeostasis: es el equilibrio dinámico entre las partes del sistema. Los sistemas
tienen una tendencia a adaptarse con el fin de alcanzar un equilibrio interno frente a
los cambios externos del entorno.
1.13. CARACTERÍSTICAS ESTRUCUTURALES Y FUNCIONALES DE LOS SISTEMAS
Los sistemas contienen características estructurales y funcionales
1.13.1. CARACTERISTICAS ESTRUCTURALES
Las características estructurales que se encuentran en los sistemas son:
Elementos: Son los componentes fundamentales del sistema. Un elemento es la
representación simplificada de alguna característica de la realidad objeto de estudio.
Relaciones entre elementos o redes de comunicación: Los elementos o componentes
están interrelacionados. En un sistema no se retienen todas las interacciones entre todos
los elementos, sino las más significativas para los fines concretos con que esté laborando
el sistema. Las redes de comunicación pueden tener un soporte físico o ser redes o
conexiones mentales o abstractas.
Las relaciones son los enlaces que vinculan entre sí a los objetos o subsistemas que
componen a un sistema complejo.
Podemos clasificarlas en:
o Simbióticas: es aquella en que los sistemas conectados no pueden seguir
funcionando solos. A su vez puede subdividirse en unipolar o parasitaria, que es
cuando un sistema (parásito) no puede vivir sin el otro sistema (planta); y bipolar o
mutual, que es cuando ambos sistemas dependen entre si.
o Sinérgicas: es una relación que no es necesaria para el funcionamiento pero que
resulta útil, ya que su desempeño mejora sustancialmente al desempeño del sistema.
Sinergia significa "acción combinada". Sin embargo, para la teoría de los sistemas el
término significa algo más que el esfuerzo cooperativo. En las relaciones sinérgicas la
acción cooperativa de subsistemas semi-independientes, tomados en forma conjunta,
origina un producto total mayor que la suma de sus productos tomados de una
manera independiente.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
8

o Superfluas: Son las que repiten otras relaciones. La razón de las relaciones
superfluas es la confiabilidad. Las relaciones superfluas aumentan la probabilidad de
que un sistema funcione todo el tiempo y no una parte del mismo. Estas relaciones
tienen un problema que es su costo, que se suma al costo del sistema que sin ellas
puede funcionar.
Límites y/o interfases: Un sistema puede tener límites precisos o una zona llamada
interfase, que lo separa del entorno circundante o de otros sistemas, de tal manera que,
sin ambigüedad, se sepa si un determinado elemento o red pertenece o no al sistema.
1.13.2. CARACTERISITICAS FUNCIONALES DE LOS SISTEMAS
Las características funcionales de los sistemas son las siguientes:
Flujos: Ya sea de materiales, información o energía que circulan entre variables de
estado. Esta circulación se hace a través de las redes de comunicación y cuenta con
dispositivos: válvulas o grifos que controlan los diversos flujos.
Redes de retroalimentación (feedback): cadenas de causalidad o influencias circulares
entre elementos.
1.14. ESTRUCTURA Y COMPORTAMIENTO DE SISTEMAS
La estructura y el comportamiento de los sistemas son materia de importancia básica para la
comprensión integral de la TGS (Teoría General de Sistemas).
1.14.1. ESTRUCTURA
Hemos visto que por definición un sistema está compuesto de subsistemas que interactúan
entre sí, los que a su vez se componen de elementos u otros subsistemas, y así
sucesivamente hasta su máxima descomposición en elementos. Todos los elementos del
sistema interactúan entre sí por medio de relaciones directas o indirectas.
Es la caracterización de estas relaciones y de cada uno de los elementos lo que define la
estructura del sistema.
Un cambio de estructura de un sistema sólo se puede producir por un cambio (aumento,
disminución o sustitución) de elementos, y/o por un cambio en la cantidad, calidad o
disposición de relaciones entre ellos.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
9

1 3
2
Las relaciones entre elementos se materializan por medio de canales a través de los cuales
se intercambia materia, energía o información
Una forma de describir la estructura de sistemas es mediante matrices que representen la
interacción de los distintos elementos entre sí y con el medio ambiente.
Sea un sistema de N elementos, su estructura puede definirse como:
R = (rij) con i = 0,1,2,…N
j = 0,1,2,…N
rij : acción del elemento i sobre el elemento j
rii: acción del elemento i sobre sí mismo
roj: acción del medio ambiente sobre el elemento j
rio: acción del elemento i sobre el medio ambiente
Si a los coeficientes rij les damos solamente valores 0 y 1 dependiendo de si existe o no la
acción correspondiente, llamaremos a R matriz de incidencia del sistema.
Ejemplo
La matriz de incidencia será:
R=[0 1 1 00 0 1 00 0 1 11 0 0 0 ]
En la matriz R, la fila i representa las salidas del elemento i, y la columna j, las entradas al
elemento j. _________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
.
ENTRADAS
SALIDAS
10

La fila 0 representa las entradas al sistema (salidas del medio ambiente) y la columna 0
representa las salidas del sistema (entradas al medio ambiente).
Por ejemplo
R0,2 = 1 entrada fila 0
Salida columna 2
Tiene valor 1 esto significa que existe una entrada (del medio ambiente por
ello es fila 0) que influye sobre el elemento 2 del sistema.
R2,3= 1 Significa que existe una salida del componente 2 y se convierte entrada para
el componente 3
El coeficiente r00 representa la acción del medio ambiente sobre sí mismo, siendo por lo tanto
una acción externa al sistema, que en caso de existir no nos interesa, por lo cual se le da el
valor cero.
Esta matriz de incidencia nos dice solamente si hay o no interacción, y en que sentido, entre
cada par de elementos, o entre cada elemento y el medio.
Si nos interesa una descripción más precisa, no nos bastará con saber que el elemento i
acciona sobre el elemento j, sino queremos asegurarnos de cuál entre todas las salidas
posibles de i es la que actúa en j; o aún más, en qué forma (puesto que un elemento puede
accionar en más de una forma sobre otro).
En este caso, se constituye una matriz W, llamada matriz de estructura, en la siguiente
forma:
W=( Aij )
En que cada matriz A i j es la matriz de acoplamiento entre el elemento i y el elemento j.
Así, en un sistema con dos elementos, la matriz de estructura tendrá la forma:
W=[ A 00 A 01 A 02A 10 A 11 A 12A 20 A 21 A 22 ]
La matriz de acoplamiento A ij entre dos elementos, se construye de la siguiente manera:_________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 11

1 2
Sea M el mayor entre la cantidad máxima de entradas y salidas posibles en cada uno de
todos los elementos y el medio ambiente de un sistema.
Entonces:
Aij = (a k1) ij
Donde:
k = 1,2, …, M
i = 1,2,….M
j = 1,2,….N
a k1: tomara el valor 0 o 1 dependiendo de si la salida k del elemento i constituye o no la
entrada 1 al elemento j
Ejemplo:
Matrices de acoplamiento
A 00=[0 0 00 0 00 0 0 ]A 01=[0 1 0
0 0 00 0 0 ] A 02=[0 0 0
0 0 00 0 0 ]
A 10=[0 0 00 0 00 0 0 ] A 11=[0 0 0
0 0 00 0 1 ]A 12=[1 0 0
0 1 00 0 0 ]
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
1
23
1
32
1
23
1 M=3N=2
1
12

A 20=[0 0 01 0 00 0 0 ] A 21=[1 0 0
0 0 00 0 0 ] A 22=[0 0 0
0 0 00 0 1 ]
Matriz de estructura
W=[[0 0 00 0 00 0 0 ] [0 1 0
0 0 00 0 0 ] [0 0 0
0 0 00 0 0 ]
[0 0 00 0 00 0 0 ] [0 0 0
0 0 00 0 1 ] [1 0 0
0 1 00 0 0 ]
[0 0 01 0 00 0 0 ] [1 0 0
0 0 00 0 0 ] [0 0 0
0 0 00 0 1 ] ]
Matriz de incidencia
R=[0 1 00 1 11 1 1 ]
Es conveniente señalar que si bien esta notación rigurosa es principalmente conceptual,
existen algunas aplicaciones interesantes en el área de Sistemas de comunicación, Sistemas
eléctricos, Sistemas hidráulicos, etc.
1.14.2. COMPORTAMIENTO
Hemos dicho que el comportamiento de un sistema es la relación que existe entre los
estímulos que recibe y las respuestas que entrega. Esta definición no considera las
reacciones ni los actos de un sistema, que también constituye comportamiento.
Sin embargo, las reacciones pueden ser vistas como casos particulares de respuestas, ya
que la única diferencia es que no dependen del estado del sistema en el momento de recibir
el estímulo
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
13

e
Desde este punto de vista, y dejando de lado por el momento a los sistemas autónomos, es
decir, aquellos sistemas capaces de actuar sin la necesidad de estímulos, puede decirse que
el comportamiento de un sistema se puede describir mediante la función que relaciona el
último estímulo recibido y el estado del sistema en ese instante, con la respuesta entregada
por el sistema.
El estado del sistema en un instante dado resume todos los estímulos recibidos en la historia
del sistema y depende además de su estructura.
Así se puede concluir que la respuesta “y” de un sistema es función del último estímulo “x” y
del estado “e” del sistema.
X y
Y= f(x,e)
En esta función no se impone ninguna restricción al tipo de función “f”, ni tampoco a x, ni e,
ya sea como escalares, vectores, valores continuos o discretos, etc., en general eso si se
puede decir que estas variables serán conjuntos de valores que representarán
respectivamente el estímulo, la salida y el estado del sistema.
A su vez, hay un problema de respuesta, es decir, cuánto intervalo de tiempo debe pasar
para identificar la respuesta , o bien, si se trata de un sistema continuo en el tiempo en que
también las respuestas se van modificando continuamente.
1.15. TIEMPO DE RESPUESTA
Intervalo de tiempo que requiere un sistema para entregar la respuesta a un estímulo dado.
Enfocaremos este problema identificando distintos comportamientos según las suposiciones
o hipótesis que en cada caso se hacen referente a los valores de los estímulos, estados y
respuestas, como al tiempo de respuesta mismo.
1.15.1. INTERVALOS DISCRETOS DE TIEMPO
Si consideramos un sistema en que los estímulos, respuestas y estados del sistema tienen
significación a intervalos discretos en el tiempo, tendremos entonces:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
14

Y i=f ( x i , e i)e i+1=g (xi , e i)
En este caso hablaremos de respuesta “instantánea”, en el sentido que la obtenida en un
instante depende del estímulo aplicado y del estado del sistema en ese mismo instante.
Sin embargo, el estado “siguiente”, depende del estado y del estímulo actual.
Yi, xi, ei pueden ser cualquier conjunto de valores cada uno, presentarse como escalares,
vectores, matrices, etc. Y a su vez f y g son funciones a las que no hemos impuesto
condiciones.
1.15.1.1. REPRESENTACION GRAFICA DEL COMPORTAMIENTO DE SISTEMA CON VALORES DISCRETOS
Si imponemos la condición adicional de que sólo tomen valores discretos las variables que
representan estímulos, respuestas y estados, para describir el comportamiento de sistemas
podemos citar las clásicas funciones analíticas, y además otros métodos gráficos:
Ejemplo de uso de Tablas:
Supongamos un sistema que sólo puede recibir dos estímulos: 0 y 1, tiene tres estados
posibles: A, B y C, y cuyas respuestas pueden ser solamente C, 1 y 2.
Podemos describir su comportamiento mediante una tabla que muestre las relaciones que en
cada instante existen entre estos valores.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
Estado
Ei
Estímulo
Xi
Respuesta
Yi
Estado Siguiente
ei+1
A
A
B
B
C
C
0
1
0
1
0
1
2
0
0
1
1
2
B
A
C
B
B
A
15

ek el
x/y
AB
0/2
C
1/0
1/2
0/0
0/1
Ejemplo de uso de grafos:
Otra forma de representar en estos casos el comportamiento de sistemas y que ha sido
abundantemente usada en teoría de autómatas, como en lenguajes formales, es mediante
grafos. Estos grafos están compuestos de dos tipos de elementos: arcos y NODOS.
Los nodos representan el conjunto posible de estados del sistema, y los arcos las
transiciones posibles y las respuestas asociadas a dichas transiciones (f y g)
Usaremos la siguiente convención.
Con lo cual se señala que estando el sistema en estado ek, al recibir el estímulo x entrega la
respuesta y, cambiando con esto al estado e1.
El ejemplo dado en la tabla anterior puede ser representado en la siguiente forma:
Cada nodo representa un estado posible (A,B,C), y cada arco corresponde a una transición,
es decir, a una fila de la tabla.
1.15.2. VALORES CONTINUOS
En el caso más general, tanto los valores de los estímulos, como de las respuestas y estado
del sistema estarán dados por cantidades continuas. Lo mismo sucederá con la variable
tiempo.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
1/1
16

Las relaciones entre todas las variables, es decir, las funciones f yg, corresponderán a
ecuaciones diferenciales e integrales a menudo complejísimas, que en muchos casos no
tiene sentido tratar de determinar.
Esta complejidad puede resolverse no considerando a los sistemas como de comportamiento
determinístico, cuyas relaciones de causa y efecto deban necesariamente ser explicitadas,
sino probabilística, lo cual se logra mediante la introducción de variables aleatorias.
Tanto en los sistemas discretos como en los continuos, la respuesta a determinado estímulo
puede no ser instantánea existiendo por lo tanto un tiempo de respuesta mayor que cero.
En los sistemas continuos es conveniente introducir las siguientes definiciones
Equilibrio Oscilatorio
Es un conjunto o secuencia de estados tales que para una señal de entrada constante se
obtiene una salida periódica.
Equilibrio Inestable:
Es un conjunto o secuencia de estados tales que para una señal de entrada constante se
obtiene una salida no periódica.
La inestabilidad puede ser permanente u ocurrir sólo por un periodo limitado de tiempo, el
que toma el nombre de periodo transiente.
1.16. CLASIFICACIÓN DE LOS SISTEMAS
Una clasificación de sistemas permite ordenar y aclarar los problemas que se presentan en
cada tipo de sistemas y los instrumentos que se disponen para enfrentarlos.
A continuación se presenta una clasificación general de los diversos sistemas existentes:
Según Ochoa, los sistemas pueden ser:
a) Sistemas Naturales
Son aquellos sistemas que no fueron creados por el ser humano.
Ejemplo: El sistema solar, un árbol, etc.
b) Sistemas Artificiales
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
17

Son considerados sistemas artificiales aquellos que fueron creados por el ser
humano.
Ejemplo: Una empresa, el sistema automóvil, el sistema computadora, etc.
Tomando en cuenta los conceptos de medio ambiente y recursos Bertalanffy clasifica a
los sistemas en:
a) Abiertos
Son aquellos sistemas que mantienen un flujo (importación, transformación y
exportación) de recursos, energía o información con su medio ambiente. Las
relaciones con el medio ambiente son tales que admiten cambios y adaptaciones.
b) Cerrados
Son aquellos que no intercambian energía ni información con su medio ambiente,
aunque pueden experimentar toda clase de cambios, es decir se encuentran aislados.
Blanchardy hace una combinación de las anteriores clasificaciones:
a) Sistemas Naturales y Artificiales
b) Sistemas físicos y conceptuales
c) Sistemas estáticos y dinámicos
d) Sistemas abiertos y cerrados
De acuerdo a su comportamiento Beer clasifica a los sistemas en:
a) Determinísticos
b) Probabilísticos
Además de las anteriores clasificaciones, existen otras, tales como:
a) Sistemas temporales
b) Sistemas permanentes
a) Sistemas sociales
b) Sistemas mecánicos
Estas entre otras
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
18

1.16.1. CLASIFICACIÓN DE LOS SISTEMAS SEGÚN LA INGENIERÍA DE SISTEMAS
a) Sistemas en tiempo continuo
Se dice que un sistema es continuo en el tiempo si opera en él continuamente. El
modelo matemático de este tipo de sistemas implica ecuaciones de entrada – salida
que se definen para cada punto del dominio del tiempo.
b) Sistemas en tiempo discreto
Se considera que un sistema está en tiempo discreto si opera sólo en puntos de
tiempo discreto y sus ecuaciones de entrada – salida está definidas sólo en esos
puntos del tiempo.
c) Sistema dinámico
A un sistema se le llama dinámico si las ecuaciones de entrada – salida están dadas
ya sea en forma de ecuaciones diferenciales (caso de tiempo continuo) o como
ecuaciones de diferencias (caso de tiempo discreto).
d) Sistemas estáticos
Si las ecuaciones de entrada – salida están dadas como ecuaciones algebraicas, al
sistema en cuestión se le conoce como sistema estático.
e) Sistemas no lineales
Un sistema es no lineal si su modelo está dado por ecuaciones no lineales.
f) Sistemas determinísticos
Si todas las señales y los coeficientes de las ecuaciones del modelo son
determinísticos, se dice que el sistema es determinístico.
g) Sistemas estocásticos o probabilísticos
Si las señales son estocásticas y si los coeficientes son o no variables aleatorias o
procesos estocásticos, entonces el sistema es estocástico.
1.17. SISTEMAS CONTROLADOS
Si se conoce la clasificación de entradas y salidas (cantidades) se dice que es un sistema
de control.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
19

No todos los sistemas son controlados.
Las cantidades del ambiente causan sucesos dentro del sistema: Independientes
Las cantidades Producidas por el sistema causan acontecimientos en el ambiente:
dependientes.
Todo suceso es un par ordenado (causa,efecto) (x,y) es una relación causal.
o Causa: Cantidades Independientes
Una cantidad independiente es una cantidad que no se expresa de modo único
como una función de cantidades.
o Efecto: Cantidades dependientes
Las cantidades dependientes se expresan explícitamente y de modo único como una
función de las cantidades independientes solamente.
1.17.1. DEFINICION PARA SISTEMAS CONTROLADOS
Un sistema de control es un arreglo de componentes físicos conectados de tal manera que el
arreglo se pueda comandar, dirigir o regular a sí mismo o a otro sistema.
En el sentido más abstracto es posible considerar cada objeto físico como un sistema de
control Cada cosa altera su medio ambiente de alguna manera, si no lo hace activamente lo
hace pasivamente
Entrada: La entrada es el estímulo o excitación que se aplica a un sistema de control desde
una fuente de energía externa, generalmente con el fin de producir, de parte del sistema de
control, una respuesta especificada
Salida: Es la respuesta obtenida del sistema de control. Puede ser o no puede ser igual a la
respuesta especificada en la entrada implica.
El propósito para el que está destinado el sistema de control generalmente determina o
define la entrada y la salida.
Existen tres tipos básicos de sistemas de control:
1. Sistemas de control hechos por el hombre.
2. Sistemas de control naturales, incluyendo sistemas biológicos
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
20

3. Sistemas de control cuyos componentes están unos hechos por el hombre y los
otros son naturales.
EJEMPLOS
1) Un conmutador eléctrico es un sistema de control, hecho por el hombre, que controla
el flujo de electricidad. Por definición el aparato o persona que actúa conmutador no
forma parte de este sistema de control.
Un calentador o calefactor controlado por medio de un termostato que regula
automáticamente la temperatura de una pieza o recinto es un sistema de control.
2) El acto, aparentemente de indicar un objeto con un dedo requiere un sistema de
control biológico constituido principalmente por los ojos, el brazo, la mano, el dedo y
el cerebro de un hombre.
3) El sistema de control constituido por un hombre que maneja un automóvil tiene
componentes que claramente son realizadas por el hombre como de tipo biológico. El
conductor debe mantener el automóvil sobre la pista apropiada de la carretera. El
lleva a cabo esta operación mirando constantemente la dirección del automóvil con
respecto a la dirección de la carretera.
1.17.2. CLASIFICACION DE LOS SISTEMAS DE CONTROL
Los sistemas de control se clasifican en dos grandes categorías a saber:
Sistemas de Lazo Abierto
Sistemas de lazo cerrado
La diferencia la determina la acción de control, que es la cantidad que activa el sistema para
producir la salida.
Los sistemas de lazo abierto tienen dos rasgos sobresalientes:
1. La habilidad que éstos tienen para ejecutar una acción con exactitud está
determinada por su calibración.
2. Estos sistema no tiene el problema de la inestabilidad.
Los sistemas de lazo cerrado se llaman comúnmente sistemas de control por
retroalimentación.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
21

Para clasificar si un sistema es cerrado o abierto, se deben distinguir claramente los
componentes del sistema de los componentes que interactuar con él pero que no forman
parte del mismo. Por ejemplo un operador humano puede o no ser un componente del
sistema.
EJEMPLOS
1. Un tostador automático es un sistema de control de lazo abierto puesto que está
controlado por un regulador de tiempo. El tiempo requerido para hacer “buenas
tostadas” debe ser estipulado por el usuario quien no forma parte del sistema.
1.18 ENFOQUE SISTEMICO – TEORIA GENERAL DE SISTEMAS
El enfoque sistémico trata de comprender el funcionamiento de la sociedad desde una
perspectiva holística e integradora, en donde lo importante son las relaciones entre los
componentes. Se llama holismo al punto de vista que se interesa más por el todo que por las
partes. El enfoque sistémico no concibe la posibilidad de explicar un elemento si no es
precisamente en su relación con el todo. Metodológicamente, por tanto el enfoque sistémico
es lo opuesto al individualismo metodológico, aunque esto no implique necesariamente que
estén en contradicción.
Una exposición moderna del enfoque sistémico es la llamada Teoría General de Sistemas
(TGS) que fue propuesta por el biólogo austriaco Ludwig von Berthalanffy al rededor de
1930.
La meta de la Teoría General de los Sistemas no es buscar analogías entre las ciencias, sino
tratar de evitar la superficialidad científica que ha estancado a las ciencias. Para ello emplea
como instrumento, modelos utilizables y transferibles entre varios continentes científicos,
toda vez que dicha extrapolación sea posible e integrable a las respectivas disciplinas.
Los objetivos originales de la Teoría General de Sistemas son los siguientes:
Impulsar el desarrollo de una terminología general que permita describir las características,
funciones y comportamientos sistémicos.
Desarrollar un conjunto de leyes aplicables a todos estos comportamientos y, por último,
Promover una formalización (matemática) de estas leyes.
La teoría general de los sistemas, al igual que todas las ciencias verdaderas, se basa en una
búsqueda sistemática de la ley y el orden en el universo; pero a diferencia de las otras _________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 22

ciencias, tiende a ampliar su búsqueda, convirtiéndola en una búsqueda de un orden de
órdenes, de una ley de leyes. Este es el motivo por el cual se le ha denominado la teoría
general de sistemas.
1.18.1 CARACTERÍSTICAS DE LA TEORÍA GENERAL DE SISTEMAS
Según Schoderbek y otros (1993) las características que los teóricos han atribuido a la teoría
general de los sistemas son las siguientes:
Interrelación e interdependencia de objetos, atributos, acontecimientos y otros
aspectos similares. Toda teoría de los sistemas debe tener en cuenta los elementos
del sistema, la interrelación existente entre los mismos y la interdependencia de los
componentes del sistema. Los elementos no relacionados e independientes no
pueden constituir nunca un sistema.
Totalidad. El enfoque de los sistemas no es un enfoque analítico, en el cual el todo se
descompone en sus partes constituyentes para luego estudiar en forma aislada cada
uno de los elementos descompuestos: se trata más bien de un tipo gestáltico de
enfoque, que trata de encarar el todo con todas sus partes interrelacionadas e
interdependientes en interacción.
Búsqueda de objetivos. Todos los sistemas incluyen componentes que interactúan, y
la interacción hace que se alcance alguna meta, un estado final o una posición de
equilibrio.
Insumos y productos. Todos los sistemas dependen de algunos insumos para
generar las actividades que finalmente originaran el logro de una meta. Todos los
sistemas originan algunos productos que otros sistemas necesitan.
Transformación. Todos los sistemas son transformadores de entradas en salidas.
Entre las entradas se pueden incluir informaciones, actividades, una fuente de
energía, conferencias, lecturas, materias primas, etc. Lo que recibe el sistema es
modificado por éste de tal modo que la forma de la salida difiere de la forma de
entrada.
Entropía. La entropía está relacionada con la tendencia natural de los objetos a caer
en un estado de desorden. Todos los sistemas no vivos tienden hacia el desorden; si
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
23

los deja aislados, perderán con el tiempo todo movimiento y degenerarán,
convirtiéndose en una masa inerte.
Regulación. Si los sistemas son conjuntos de componentes interrelacionados e
interdependientes en interacción, los componentes interactuantes deben ser
regulados (manejados) de alguna manera para que los objetivos (las metas) del
sistema finalmente se realicen.
Jerarquía. Generalmente todos los sistemas son complejos, integrados por
subsistemas más pequeños. El término "jerarquía" implica la introducción de sistemas
en otros sistemas.
Diferenciación. En los sistemas complejos las unidades especializadas desempeñan
funciones especializadas. Esta diferenciación de las funciones por componentes es
una característica de todos los sistemas y permite al sistema focal adaptarse a su
ambiente.
Equifinalidad. Esta característica de los sistemas abiertos afirma que los resultados
finales se pueden lograr con diferentes condiciones iniciales y de maneras diferentes.
Contrasta con la relación de causa y efecto del sistema cerrado, que indica que sólo
existe un camino óptimo para lograr un objetivo dado. Para las organizaciones
complejas implica la existencia de una diversidad de entradas que se pueden utilizar
y la posibilidad de transformar las mismas de diversas maneras.
Dadas estas características se puede imaginar con facilidad una empresa, un hospital, una
universidad, como un sistema, y aplicar los principios mencionados a esa entidad. Por
ejemplo las organizaciones, como es evidente, tienen muchos componentes que interactúan:
producción, comercialización, contabilidad, investigación y desarrollo, todos los cuales
dependen unos de otros.
Al tratar de comprender la organización se le debe encarar en su complejidad total, en lugar
de considerarla simplemente a través de un componente o un área funcional. El estudio de
un sistema de producción no produciría un análisis satisfactorio si se dejara de lado el
sistema de comercialización.
1.18.2 PRINCIPIOS, PROPIEDADES Y PARADOJAS
1.18.2.1 PRINCIPIOS
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
24

a) Sinergia
Este principio es también conocido como, no sumatividad, para expresar que la suma de
los componentes del sistema en forma separada no dan como resultado la totalidad del
sistema.
Un objeto (sistema) posee sinergia cuando al análisis de alguna de sus partes en forma
aislada no explica la conducta del todo. Si las partes del objeto son independientes, sin
interacción, entonces no existe sinergia y la suma de las partes es igual al todo.
Un objeto sinergético es esencialmente organizativo antes que aditivo. Para explicar su
conducta global, es necesario estudiar todas sus partes y si se logra establecer las
relaciones existentes entre ellas, el efecto final sobre el objeto será un efecto conjunto.
b) Totalidad
A la sinergia suele asignarse el valor de corolario del principio de Totalidad. Ciertas
propiedades del todo no las tienen sus partes.
La estructura de un sistema no puede dividirse en sus elementos sin que pierda su
significación como una totalidad y sin que cambie el valor de cada parte.
Un sistema es una totalidad a la cual pertenecen cada aspecto o atributo (color, tamaño,
forma, etc.) de las partes que comprende.
Mientras mayor sea la organización del todo, mayor será la utilización de las propiedades
inherentes de las partes.
La variabilidad o cambios que se producen en la totalidad, es menor a la suma de las
variabilidades de cada una de sus partes; de manera que se impone la acción equilibrada
de la totalidad. Los cambios que se producen entre los elementos del sistema se
cancelan unos con otros, permaneciendo el sistema en equilibrio.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
25

Es decir, sea: S = {a, b, c, ...., n}ç
Donde:
S es un sistema
a, b, ..., n los elementos de S
Entonces:
V(S) < V(a) + V(b) + ... + V(n)
c) Multiplicidad de Descripciones
Para obtener un conocimiento adecuado sobre un sistema se requieren tres niveles
diferentes de descripción:
i) Desde el punto de vista de sus propiedades exteriores y totales (medio ambiente,
estructura, objetivos).
ii) Tomando en cuenta su estructura interna y el “aporte” de sus componentes a la
formación de las propiedades totalizadoras del sistema.
iii) Desde el punto de vista de la comprensión del sistema como subsistema de otro más
amplio.
d) Integridad
Cada una de las partes del sistema mantiene relaciones con las otras dentro de procesos
que originan cambios. Según este principio, la modificación de cualquier elemento del
sistema que influye sobre los demás elementos del mismo es conducente a la
transformación de todo el sistema y a la inversa, es decir, que la modificación de
cualquier elemento depende de todos los demás elementos del sistema.
ENUNCIADOS
A partir de los principios de Sinergia, Totalidad e Integridad, se desprenden los siguientes
enunciados:
La conducta de cada elemento tiene un efecto sobre la conducta del todo.
La conducta de los elementos y sus efectos sobre el todo son interdependientes. Esto
implica que el modo en que cada elemento se comporta y el modo en que influye sobre el
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
26

todo, depende al menos de como se comporta otro elemento. Ningún elemento tiene un
efecto independiente sobre el sistema, considerando este como un todo.
Los elementos de un sistema están interconectados de tal manera que no pueden
formarse subgrupos independientes de ellos. De acuerdo con lo anterior:
Un sistema es un todo que no puede ser dividido en partes independientes
Cada parte de un sistema tiene propiedades que se pierden cuando se separan del
sistema.
Cada sistema tiene algunas propiedades esenciales que no tiene ninguna de sus
partes.
1.18.2.2 PROPIEDADES
a) Propiedad autorreguladora del sistema
Un sistema para su normal funcionamiento requiere de ciertas capacidades como:
i) Preservación y recuperación del estado relativo de equilibrio.
ii) Anulación o disminución de los efectos nocivos sobre él (dentro de cierto límites).
iii) Reciprocidad de relaciones.
Ejemplo: El cuerpo humano necesita cierta cantidad de agua para mantener cierto
equilibrio, si el nivel de agua no es el adecuado la recuperación del estado de equilibrio
se logra ingiriendo cierta cantidad de agua, por otra parte la anulación o disminución de
los efectos nocivos en el cuerpo humano, se realiza a través de los riñones, que son los
encargados de purificar la sangre, eliminando las impurezas
b) Retroalimentación
Es la propiedad de los sistemas de reintroducir parte de sus salidas o procedimientos a
sus entradas, a fin de afectar las salidas sucesivas.
Se establece una interacción del sistema con su medio ambiente; la información que
ingresa al sistema va a puntos donde hay toma de decisiones y estas decisiones
determinan acciones que inducirán cambios en aquellas partes del medio ambiente que
interesan al sistema. El sistema percibe estos cambios y produce nueva información para
sus puntos de toma de decisiones. Esto genera nuevas acciones y el proceso continúa.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
27

1.18.2.3 PARADOJAS
a) Paradoja Jerárquica
La solución de la tarea descriptiva de cualquier sistema, solo es posible a condición de
solucionar la tarea de describirla como elemento de un sistema más amplio.. A su vez, la
solución de la tarea de descripción de sistema en cuestión, como elemento de otro más
amplio, solo es posible a condición de describir el sistema en cuestión como tal.
El círculo lógico de esta dependencia mutua constituye la base de la paradoja jerárquica.
b) Paradoja de Integridad
El conocimiento del sistema como algo integral, es imposible sin observarlo “por dentro”,
es decir, sin el análisis de sus partes, mientras que para dividir “íntegramente” el mismo
en partes, se requiere solucionar la tarea de describir el sistema como algo integral.
El fundamento lógico de esta paradoja lo constituye la dependencia mutua de la solución
de la tarea de descripción de un sistema como integridad y la de describir las partes
“integrales” del sistema.
c) Paradoja Sistémico-Metodológico
La solución de la tarea de construir un conocimiento adecuado acerca de los sistemas
concretos, sólo es posible sobre la base de la metodología elaborada para la
investigación sitémica, pero esta metodología sólo puede elaborarse sobre la base de
una descripción adecuada de los sistemas concretos que cumpla la exigencia de la
metodología sistémica.
Esta paradoja consiste en la dependencia mutua de dos tareas:
La de elaboración de la descripción del sistema concreto y la de elaboración de la
metodología de la investigación sistémica: la condición necesaria para la solución de la
primera tarea es la existencia de una solución a la segunda, mientras que para solucionar
la segunda hace falta la solución de la primera.
Ejercicio
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
28

Objetivo:El objetivo de esta práctica es que los participantes del grupo ejerciten la investigación de
los temas asociados con la asignatura.
A partir de las sesiones de clase se desarrolla una investigación complementaria,
enriquecida con ejemplos y presentada en el formato que se anexa.
Actividades:A continuación estan los sistemas que deberán estudiar:
1. La Asamblea Constituyente
2. La capa de ozono y la supervivencia en el planeta tierra
3. Efecto Mariposa
4. Atención al público en telefonía celular
5. Producción agrícola y precios del pimenton
6. Producción y venta de tucumanas en la cafetería de la USB
7. La epidemia del dengue
8. Ley Seca
9. La ingesta de comida y la sensación de saciedad
10. El traslado de la sede en Bolivia
11. Bolivia entre los 10 países más corruptos de América
12. La fiebre de la copa América
13. Turismo en Copacabana y la Isla del Sol
14. Nacimiento de una nueva aerolínea en Boliva
15. Bolivia como exportador de electricidad
Para cada caso identificar las características estructurales y funcionales de los sistemas;
principios, paradojas y enunciados de los sistemas. Además determinar la categoría de
sistemas al cual pertenece.
CAPÍTULO II INGENIERÍA DE SISTEMAS I
DIAGRAMAS CAUSALESEl conjunto de los elementos que tienen relación con un problema en estudio y permiten en principio explicar el comportamiento observado, junto con las
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
29

relaciones entre ellos, en muchos casos de retroalimentación, forman el Sistema. El Diagrama Causal es un diagrama que recoge los elementos clave
del Sistema y las relaciones entre ellos.
2.1. RELACIONES CAUSALES
Una relación es una par causa efecto, no hay sentido hablar de relaciones causales a
menos que exista una clara separación entre cantidades dependientes e independientes
donde cada cantidad dependiente puede expresarse explícita y unívocamente como función
de las cantidades restantes. Mientras que las independientes no pueden expresarse
explícitamente.
Si el control de un sistema no es conocido, nuestra primera tarea debe ser el de determinar
este control investigando el comportamiento del sistema desde el punto de vista de las
relaciones causales y complementando con el conocimiento disponible del sistema. Por
tanto antes de resolver un problema relativo a un sistema se tiene que conocer el control.
Las cantidades independientes son las que vienen del medio ambiente y producen cambios
en el sistema.
Cantidades dependientes son las producidas por el sistema, derivadas de las
independientes y de las propiedades del sistema. Ejemplo: Fuerza, temperatura.
Las cantidades del ambiente cusan suceso al sistema.
2.2. CAUSAS Y EFECTOS
Existen varios tipos de relaciones causales. En lo que sigue discutiremos algunos de los
tipos más comunes.
Ejemplos
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
30

Consumo de peso
alimentos
- población + recurso per capita
Relaciones que reflejan leyes físicas o lógicas. Por ejemplo, las leyes del movimiento de
Newton:
Fuerza de empuje movimiento de aceleración
Casos de esta relación abundan:
- La fuerza de empuje del motor de un carro causa que este se mueva, etc.
Incluso este caso tan directo y simple parece tener sus excepciones. Por ejemplo, no
podríamos afirmar que una persona que ejerce una fuerza en contra de un edificio causa que
este se mueva. ¿Qué sucede en este caso?
Cuando se plantean relaciones causales se asume implícitamente que todos los otros
factores no involucrados en la relación permanecen constantes. Esto no sucede en este
caso. Las estructuras de los edificios son especialmente diseñadas para ser resistentes a
fuerzas menores (como el empuje que una persona puede ejercer en una de sus paredes) o
mayores (como la fuerza del viento, etc.).
Al plasmar relaciones causales ayuda considerar lo que pasaría si la influencia particular
considerada fuera la única que actúa sobre el objeto en particular.
Ejemplo I
Nacimientos Crecimiento de la Población
Esta relación causal es siempre cierta a pesar del hecho de que países como una tasa de
nacimientos positiva no muestren crecimiento de su población. Esto sucede porque los
nacimientos no son la única influencia causal que actúa sobre el crecimiento de la población, _________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 31

la mortalidad y otros factores pueden explicar el no crecimiento de la población. Sin
embargo, si todo lo demás permanece constante, la relación es verdadera.
En muchos casos, es más apropiado cambiar la palabra causa por influencia o afecta.
Considere por ejemplo: “Consumir alimentos causa el peso” versus “Consumir alimentos
afecta el peso”
Ejercicio 1
Escriba una o dos oraciones estableciendo por que usted esta de acuerdo o en desacuerdo
con cada una de las siguientes relaciones sugeridas:
a) Dinero -> Felicidad
b) Inteligencia -> Notas
c) Hojas -> Viento
d) Fuego -> Humo
Ejemplo 2
La causalidad puede ser difícil de observar y medir en algunas circunstancias. Considere la
siguiente relación:
Uso de Cinturones Reducción en la fatalidad
de Seguridad de accidentes de tránsito
Este es un ejemplo de relaciones donde lo que se representa es un agregado de
comportamientos individuales. En promedio, usar cinturones de seguridad reduce la
probabilidad de fatalidades en los accidentes de tránsito pero ciertamente hay ciertos tipos
de accidentes donde el uso del cinturón de seguridad no conduce a una reducción en la
fatalidad. Además, la reducción en la fatalidad de los accidentes de tránsito puede obtenerse
por otras causas o influencias.
Ejemplo 3
Un tipo particular de relación causal muy problemática es la postulan interpretaciones de
motivaciones personales. Por ejemplo, en un país de clima templado un sociólogo está
realizando un estudio de las causas de suicidio en una población. El postula que la reducción
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
32

en las horas de luz diurna que caracterizan los meses de invierno es una de las causas de
suicidios en los climas templados en los meses de invierno.
Menos horas de Incremento en la
luz diurna tasa de suicidios
Esta relación no representa comportamiento predictivo a nivel individual; es decir, es
imposible predecir si un individuo en particular se suicidará o no basado en esta relación
causal. Un investigador pudiese plantear esta relación como una representación estadística
del agregado de la población. Sin embargo, aun en este caso su interpretación es difícil ya
que pueden existir varias interpretaciones diferentes o solapadas para el mismo hecho que
involucran eventos diferentes. Por ejemplo, la relación podría establecerse de la siguiente
manera:
Menos Horas Restricción de Aumento Estrés Incremento
de luz diurna las actividades del desempleo financiero de la tasa de
al aire libre suicidio
Ejercicio 2
Complete cada una de las oraciones siguientes de manera de construir una relación causal
factible y dibuje un diagrama con flechas para representarla:
a) La dificultad de la materia de Ingeniería de sistemas causa que yo ______________
b) El estrés hace que yo ______________
c) Altos precios de los pasajes en flotas causan ________________
d) Escasez de ingenieros en el mercado laboral causa ______________
e) La inflación causa ______________
f) El desempleo causa _____________
g) Un incremento en el número de conejos en un campo causa _______________
Resumiendo lo discutido en los ejemplos anteriores al plantearse una relación causal es
bueno preguntarse:
¿Cuál es el tipo de causalidad involucrada?
¿Qué tipo de evidencia puede considerarse para aprobar o refutar la relación?
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
33

¿Qué otros supuestos alternativos son posibles?
2.3. RELACIONES DE INFLUENCIA SIMPLE
En realidad, un diagrama causal es en sí un modelo1, en la medida en que supone hacer una
representación gráfica de un sistema. Un diagrama causal es un modelo más formalizado
que una descripción lingüística; pero mucho menos preciso que un sistema de ecuaciones
matemáticas. En un diagrama causal aparecen formalizados los elementos del sistema y se
establecen las relaciones entre ellos, haciendo constar cuál es el signo de variación
esperado entre cada par de elementos. Así, cuando se vea representada la relación:
a +b
Natalidad +nacimientos
Se quiere significar que las variables a y b se mueven temporalmente en el mismo sentido,
es decir, si una crece, la otra también y viceversa.
Por otra parte también se puede presentar la relación del tipo:
a -c
Superficie de una comarca - densidad población
Significa todo lo contrario, es decir, que las variables a y c se mueven a lo largo del tiempo
en sentido contrario: cuando una crece la otra decrece y viceversa.
2.4. LAZOS DE REALIMENTACIÓN
Un lazo o bucle de realimentación es una cadena cerrada de relaciones causales y
constituyen el componente estructural básico de los modelos de dinámica de sistemas.
Sin lazos de realimentación, una cadena causal puede extenderse casi indefinidamente sin
ningún claro propósito. Considere por ejemplo, el ciclo hídrico en la tierra:
Luz masa húmedas lluvia crecimiento de
Solar de aire los animales
Evaporación colisión con crecimiento de etc.
De los océanos otras masas de aire las plantas1 Modelo : es una representación formal de un sistema._________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 34

Para hacer más clara la representación del sistema es necesario concentrarse en lazos o
cadenas causales. En un lazo causal, la causa inicial es como una onda que se propaga a
través de la cadena entera de causas y efectos hasta que la causa inicial termina siendo un
efecto en si misma. Por ejemplo, considere la perturbación en la temperatura de un cuarto
causada por un incremento en la temperatura del ambiente exterior. Este aumento en la
temperatura puede causar varias acciones:
Las personas se pueden poner ropas más frescas o moverse a una zona más fresca
de la casa.
El termostato del sistema del aire acondicionado enciende el aire. Encender el aire
causa un incremento en el consumo de energía eléctrica de la casa.
También, encender el aire causa el uso y desgaste del sistema de aire acondicionado
lo que ocasiona gastos futuros en mantenimiento y reparación del sistema de aire.
Sin embargo, ninguna de estas posibles relaciones afecta la temperatura del aire del cuarto
en cuestión. El efecto importante del termostato del sistema que enciende el aire es la
disminución o control de la temperatura del aire. El diagrama causal que representa todas
estas relaciones es como sigue:
Temperatura
Exterior
Actividades de las
Personas para refrescarse
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
35

Temperatura
Del cuarto Actividad del
Termostato
Actividad del
Aire acondicionado
Consumo uso y desgaste
Eléctrico del sistema de aire acondicionado
Pago de servicio de reparación
Electricidad y mantenimiento
Concentrarse en los lazos cerrados de realimentación ayuda en la definición de los modelos
de dinámica de sistemas de la siguiente manera:
Ayuda a aclarar la definición de las fronteras del sistema, es decir, ayuda a vislumbrar
que debe y no debe ser incluido en el sistema bajo estudio.
Ayuda a concentrarse en las relaciones importantes para controlar el sistema
(controlar la temperatura de un cuarto, la inflación, la contaminación de un
ecosistema, etc.)
Algunos otros ejemplos de lazos de realimentación se muestran a continuación:
Ejemplo 4
El número de postres suculentos que uno come afecta la magnitud del sobrepeso. La
magnitud del sobrepeso influencia mi preocupación por el sobrepeso. La preocupación por el
sobrepeso influencia el número de postres suculentos que como.
Numero de postres magnitud del
Suculentos que uno come sobrepeso
Preocupación por _________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 36

el sobrepeso
Ejemplo 5
Cuanto práctico el piano afecta mi habilidad para tocarlo. A su vez, mi habilidad para tocar el
piano afecta el placer que obtengo al tocar el piano. El placer que obtengo al tocar el piano
influencia cuanto tiempo estoy dispuesto a practicar el piano.
Cuanto práctico Habilidad para
el piano tocar el piano
Placer que obtengo
tocando piano
Ejercicio 3
Complete los diagramas causales del ejercicio II de manera de producir un diagrama causal
cerrado o de realimentación. Escriba una corta explicación del comportamiento que espera
en el lazo identificado. Por ejemplo, un posible lazo causal para
a) sería:
La dificultad de la materia Estudio
de ingeniería de sistemas I
La dificultad de la materia de Ingeniería de sistemas I afecta cuanto tiempo tengo que
estudiar. El tiempo que dedico para estudiar afecta como percibo la dificultad de la materia
de ingeniería de sistemas I.
2.5. CATEGORÍAS O CLASES DE LAZOS DE REALIMENTACIÓN
Las relaciones que se postulan en los diagramas causales pueden hacerse más claras
describiendo si el efecto de las causas sobre los efectos es de disminución o aumento.
Considere el ejemplo 5 anterior de la práctica del piano. Es claro que las siguientes
proposiciones son equivalentes:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
37

+
+
+
++
+
Mientras más práctico mejor mi habilidad para tocar el piano; mientras mejor es mi
habilidad para tocar el piano, más disfruto tocando el piano; y mientras más disfruto
tocando el piano más lo práctico.
Un incremento en la cantidad de práctica de piano causa un incremento en mi
habilidad para tocar el piano; un incremento en la habilidad para tocar el piano causa
un incremento en el placer que me produce tocar el piano. Esto a su vez causa un
incremento en la cantidad de práctica.
Por supuesto, las relaciones opuestas también son ciertas:
Mientras menos practico peor mi habilidad para tocar el piano; mientras peor es mi
habilidad para tocar el piano, menos disfruto tocando el piano; y mientras menos
disfruto tocando el piano menos lo práctico.
Un decremento en la cantidad de práctica de piano causa un decremento en mi
habilidad para tocar el piano; un decrecimiento en la habilidad para tocar el piano
causa un decrecimiento en el placer que me produce tocar el piano. Esto a su vez
causa un decremento en la cantidad de práctica.
2.5.1 BUCLES DE REALIMENTACIÓN POSITIVOS
Considérese los ejemplos de la siguiente figura, en los tres casos sucede que los bucles
conducen o a una expansión o a una depresión. En efecto, la cadena de causalidad
implícita en cada ejemplo lleva a que si crece la variable principal, crecerá la variable-flujo
sobre la que influye, y de la que depende. Pero, también es verdad el razonamiento inverso:
si el valor de la variable principal se hace negativo, el proceso tenderá a deprimirse.
Nacimientos Intereses Individuos
Contagiados
Población Depósitos Individuos
Bancarios Enfermos
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
38

--
++
-
+
Este tipo de lazos se conocen como lazos o bucles de realimentación positiva o de refuerzo. En estos lazos la variación de un elemento se propaga a lo largo del lazo de
manera de reforzar la variación inicial.
2.5.2 BUCLES DE REALIMENTACIÓN NEGATIVOS
Tomando en cuenta la figura, al contrario de lo que sucedía en los casos considerados
antes, ahora al aumentar una variable la otra disminuye, o viceversa, al disminuir una
variable, la otra aumenta.
Muertes Gastos Muertes
Población Dinero Individuos
Enfermos
El otro tipo de lazos o bucles son los de realimentación negativa o compensación: la
variación de un elemento se transmite a lo largo de un bucle de manera que determine una
variación de signo contrario en el mismo elemento. El lazo de ingestión de postres
suculentos es un ejemplo de un lazo de realimentación negativa ya que mientras más
postres suculentos uno come mayor es la cantidad de sobrepeso; mientras mayor es la
cantidad de sobrepeso, mayor es la preocupación por el sobrepeso y mientras más
preocupado este acerca del sobrepeso menos desiertos suculentos ingiero.
El establecimiento de estas categorías hace más claro que las variables que conforman los
lazos causales deben ser cantidades que puedan cuantificarse de alguna manera de forma
tal que tenga sentido hablar de incrementos y decrementos.
2.6. REGLAS PARA LOS SIGNOS
Cuando en una secuencia de realimentación sólo hay signos positivos, el bucle es
explosivo, o positivo
Cuando sólo hay signos negativos, el bucle es explosivo, si el número total de signos
es par; y depresivo en caso contrario
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
39

Más cansado estoy
Menos cansado estoy
Mientras más duermo
Más duermo
Mientras menos cansado estoy
Menos duermo
Mientras menos duermoMientras más cansado estoy
Cuando hay signos positivos y negativos, el sentido del bucle es explosivo si la suma
de signos negativos es par, cualquiera que sea el número de signos positivos. Caso
contrario, el bucle es depresivo.
2.7. RECORRIDO DE UN LAZO CAUSAL
Considere el siguiente ejemplo:
Este tipo de patrón es característico de los lazos compensatorios o negativos. En cambio, los
lazos positivos producen un patrón muy diferente. Considere el siguiente ejemplo:
Depresión llanto
Al recorrer este lazo obtenemos el siguiente patrón unidireccional que es característico de
los lazos de reforzamiento:
Mientras más deprimido estoy
Más deprimido estoy
Mientras más lloro
Más lloro
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
40

Mientras más deprimido estoy
Ejercicio 4:
Para los mismos casos del ejercicio 3 determine si el lazo es positivo o negativo.
2.8. FRONTERAS DEL SISTEMA
Las fronteras del sistema constituyen una línea de demarcación que establece que se
incluye o se excluye del modelo. Donde se traza la frontera puede considerase algo subjetivo
ya que esta demarcación se basa en parte en quién está interesado en el problema y cuales
son los objetivos que se persiguen con el sistema. Los siguientes principios ayudan a
entender como realizar la demarcación:
Los límites del sistema deben escogerse de manera tal que incluyan en su interior
aquellos componentes necesarios para generar los modos de comportamiento de
interés. Si se trata de estudiar un problema, los elementos descritos en el límite del
sistema deben ser capaces de generar este problema.
Aunque el concepto de límite pretender explicar que el comportamiento e interés del
sistema se genera en el interior de los límites y no viene determinado del exterior, eso
no quiere decir que el comportamiento del sistema no vaya a ser afectado de alguna
manera por el exterior sino que la acción del medio sobre el sistema puede ser
considerada como una perturbación que afecta el comportamiento autónomo del
sistema; pero ella misma no suministra al sistema sus características esenciales
Los elementos que se encuentran fuera de los límites del sistema están relacionados
con aquellos que se encuentran dentro de manera muy diferente a cómo los
elementos que se encuentran dentro están relacionados entre sí. Las relaciones de
causa-efecto entre el medio y el sistema son unidireccionales, mientras que los
elementos en el interior del sistema están estructurados por medio de lazos de
realimentación que determinan una fuerte interacción entre ellos.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
41

La siguiente figura ilustra estos conceptos:
Ejemplo 4
Considere una compañía que distribuye alimentos frescos (como leche y pan) a un conjunto
de tiendas. La compañía está interesada en estudiar los factores que afectan la adecuada y
oportuna distribución de los productos. Dentro de los límites del sistema se incluirían las
fábricas y los distribuidores de los productos. Ahora bien si para la misma compañía el
objetivo del estudio fuera determinar el impacto de la frescura de los productos en las ventas,
además de los componentes ya estudiados habría que incluir también dentro del sistema el
comportamiento de los consumidores y a los competidores de la empresa.
Ejemplo 5
El jefe de la zona educativa de El Alto esta interesado en una visión sistémica de todas las
escuelas primarías en su jurisdicción. Comienza su tarea haciendo una lista de los
componentes principales que en su opinión conforman el sistema de escuelas primarias:
Estudiantes libros maestros trabajos pupitres
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
42

Directores juegos bibliotecas exámenes papel
Salones amigos música pizarrón
Implícito en la lista es una afirmación de lo que el jefe considera importante en las escuelas
primarias. Sin embargo, no esta claro para que se hizo esta lista y como se seleccionó. La
lista podría servir, por ejemplo, para comunicar a los padres de los niños las actividades que
los niños realizan en la escuela. La lista sería muy diferente si el problema fuera, por
ejemplo, el presupuesto de la zona educativa para la escuela primaria el próximo año ó una
revisión de los programas de la escuela primaría. Como este ejemplo lo demuestra, es
imposible identificar los elementos que deben incluirse en un sistema sin una idea clara de
cual es el problema y quien está interesado en él.
Ejercicio 5
a) Haga una lista de cinco sistemas y una pregunta o problema interesante asociada a ellos
b) Seleccione uno de los problemas de la lista anterior. Escriba palabras o frases que ayuden
a definir los elementos que deben incluirse en el sistema en cuestión
c) ¿Puede pensar en alguna manera de reenfocar el sistema anterior que cambiaría la
definición de los límites del sistema? Plantee el problema y rehaga la lista de los
componentes
d) Desarrolle un diagrama causal para uno de los puntos de vista especificados en
2.9. REGLAS PARA LOS SIGNOS:
Cuando en una secuencia de realimentación sólo hay signos positivos, el bucle es explosivo,
o positivo
Cuando sólo hay signos negativos, el bucle es explosivo, si el número total de signos
es par; y depresivo en caso contrario
Cuando hay signos positivos y negativos, el sentido del bucle es explosivo si la suma
de signos negativos es par, cualquiera que sea el número de signos positivos. Caso
contrario, el bucle es depresivo.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
43

EJERCICIOS
1. Crear un Diagrama Causal del sistema.
o La población se incrementa debido a la natalidad.
o La natalidad se incrementa debido al tamaño de la población.
o La población se reduce debido al número de muertes.
o Como la población aumenta, también aumenta el número de muertes.
o Como la población aumenta, la densidad de población de la área también aumenta.
o Como la área dada crece, la densidad disminuye. (Ya que dada área no se ve
afectada por ninguna otra variable, es decir, no cambia con los valores de otras
variables del sistema, se le llama una variable exógena. Una variable afectada por
otros factores en el sistema, se le conoce como variable endógena).
o Como la densidad aumenta, la fertilidad disminuye; por lo tanto, la natalidad
también disminuye.
o La densidad de población afecta el tiempo de vida promedio de las personas que a
su vez provoca muertes.
2. Construya un diagrama causal para el siguiente sistema:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
44

Volante
Percepción visual
Curva carretera
Ruedas
BrazosCerebro
“Cuando el precio de las papas sube, aumenta la superficie sembrada de papas, y
consecuentemente la producción de este tubérculo. Esto, a su vez, supone una caída
del precio. Introduzca la variable exógena precipitaciones o lluvias, como causante
parcial de una mayor o menor producción”.
3. Construya un diagrama causal con los siguientes elementos del sistema ciudad:
población, contaminación, tráfico, automóviles, calidad de vida, ruidos, habitabilidad,
atracción de población, repulsión de población y otros que usted considere necesarios
u oportunos.
4. Construya un diagrama causal del siguiente sistema:” Si un periódico tiene una gran
difusión insertará mucha publicidad, lo cual aumentará su difusión. Para aumentar las
ventas es muy conveniente disponer de vendedores; pero éstos cuestan dinero y
disminuyen los beneficios, lo cual incide negativamente sobre la tirada”.
5. Considere el bucle siguiente:
¿Cómo influye la velocidad en la existencia de retardos entre percepción visual y giro de las
rudas? ¿Cómo influye el estado del conductor en esa secuencia?
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
45

CAPÍTULO III INGENIERÍA DE SISTEMAS I
CONCEPTOS Y METODOLOGÍA DE LA INGENIERÍA DE SISTEMAS
Este tema nos introducirá en los conceptos importantes de la ingeniería de Sistemas. Al finalizar el tema el estudiante será capaz de entender el proceso ordenado para hacer realidad un sistema. Presentaremos la estructura de la Ingeniería de Sistemas y sus características.
3.1. INGENIERÍA
La ingeniería se puede representar como: La aplicación de la ciencias (matemática, física,
química, eléctrica, mecánica, metalurgia, etc.) para inventar, construir, perfeccionar y utilizar
artefactos útiles y económicos al servicio de la humanidad.
3.2. FUNCIONAMIENTO DE LA INGENIERÍA
La Ingeniería funciona mediante la aplicación de conocimiento codificado (clasificado) sobre
clases, tipos de problemas.
Dentro de la Ingeniería los éxitos son muy frecuentes (diseño e implementación de sistemas
que funcionan), pero no espectaculares. La ingeniería hace más énfasis en el diseño de algo
útil (razón de la tesis), normalmente este diseño y las actividades complementarias son
rutinarias (pasos, metodologías, métodos = recetas) razón por la cual la ingeniería se puede
enseñar.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
46

RECURSOS DECRECIENTES
TECNOLOGIA CAMBIANTE
CICLOS DE ADQUISICION MAS LARGOS
MAYOR COMPETENCIA INTERNACIOALMULTIPLES CONTRATISTAS/SUBCONTRATISTAS
COMPLEJIDAD CRECIENTE DE LOS SITEMAS
BASE INDUSTRIAL MERMADA
MAYORES COSTES GLOBALES
ENTORNO ACTUAL
Se puede hablar de la evolución de una especialidad de la ingeniería cuando ocurre lo
siguiente: Cualquier producto en un principio es realizado por un virtuoso (Artesanía). Si se
produce para la venta ya con un procedimiento establecido (producción) preocupándose por
el costo de los materiales, se hablará de una actividad comercial. A esto sumamos el
conocimiento que nos brinda alguna ciencia, entonces estaremos hablando de ingeniería.
3.3. DEFINICION DE INGENIERIA DE SISTEMAS
De forma general, la Ingeniería de Sistemas es “la aplicación efectiva de métodos científicos
y de ingeniería para transformar una necesidad operativa en una configuración determinada
del sistema mediante un proceso de arriba-abajo iterativo (top-down) de establecimiento de
requisitos, selección del concepto, análisis y asignación funcional síntesis, optimización del
diseño, prueba y evaluación. Esta orientado al proceso y utiliza procedimientos de
realimentación y control.
3.4. ENTORNO ACTUAL
En general, la complejidad de los sistemas actuales va en aumento con la aparición de
nuevas tecnologías en un entorno que cambia sin cesar; el tiempo que se tarda en
transformar una necesidad identificada en el desarrollo, producción, utilización y apoyo de
los sistemas están incrementando. Hay un conjunto de factores, como los señalados en la
Fig. 1.1 que constituyen todo un reto en el entorno actual.
Cuando nos fijamos en los aspectos económicos, nos encontramos con que normalmente
existe una falta de visibilidad total o clara de los costes.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
47

Cuando se analizan las relaciones “causa-efecto”, nos encontramos con que una gran parte
del coste del ciclo de vida proyectado para un determinado sistema es consecuencia de las
decisiones tomadas durante las fases de planificación preliminar y diseño conceptual del
sistema. Las decisiones correspondientes a los requisitos operativos (por ejemplo, el número
y localización de los emplazamientos previstos), a las aplicaciones tecnológicas, a las
políticas de mantenimiento y apoyo (dos escalones frente a tres de mantenimiento),
asignación de actividades manuales y/o automatizadas, esquemas de empaquetado de
equipo y software, técnicas de diagnóstico, selección de materiales, conceptos sobre el nivel
de reparación, etc. Tienen un gran impacto sobre el coste total del ciclo de vida. Así,
mientras se intentan reducir los costes iniciales de un proyecto, muchas de las decisiones del
diseño y la gestión que se toman en esta fase pueden tener efectos catastróficos a largo
plazo.
3.5. RELACIONES DE LA INGENIERÍA DE SISTEMAS CON OTRAS DISCIPLINAS DE INGENIERÍA
Ingeniería CivilMatemáticas Física química
Ingeniería mecánica
Ingeniería Eléctrica Ingeniería Química
Psicología
Ingeniería industrial ciencias de la comunicación
Informática Estadística
Ciencias Investigación Sociales Operativa
Ingeniería de sistemas
3.6. EL PROCESO DE INGENIERÍA DE SISTEMAS
El desarrollo de la Ingeniería de sistemas es relativamente nuevo. Este se originó en los
años 60 y 70 en el desarrollo de grandes programas militares y espaciales. Hoy día, sin
embargo, está aplicándose en varias industrias llegando a ser efectivamente un principio de
integración de disciplinas y tecnologías distintas en un todo y complicado propósito.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
48

La Ingeniería es una forma de resolver problemas
La IS es una función interdisciplinaria dedicada al diseño controlado, tal que todos los
elementos son integrados para proporcionar un óptimo, para todo el sistema, como contraste
de la integración de sub-elementos optimizados.
Un Ingeniero de Sistemas es una persona capaz de realizar la integración del conocimiento
desde diferentes disciplinas y viendo problemas con una “visión holística”, aplicando el
“Enfoque de Sistemas”. Desde el momento en que un sistema complejo es creado no por
una simple persona, si no por un grupo, además la Ingeniería de Sistemas está fuertemente
ligada a la GESTION (conseguir algo organizadamente).
La IS es una rama de la tecnología de gestión e ingeniería dedicada a controlar el diseño de
sistemas complejos hechos por el hombre (sistemas socio-técnicos). El proceso de
Ingeniería de sistemas involucra una secuencia lógica de actividades técnicas y de toma de
decisiones, identificando necesidades transformándolas en prescritos socio-técnicos (es
decir aquellos que incluyen variables sociales y técnicas).
La IS se ha popularizado como una disciplina que pone especial énfasis en la aplicación de
nuevas técnicas, tales como la investigación operativa, modelado matemático y dinámica de
sistemas. Estos utilizando modelos matemáticos que describen las interacciones entre los
elementos del sistema.
Al realizar el estudio del comportamiento, a través del MODELOS (físicos y matemáticos) la
ingeniería de sistemas hace énfasis en el uso de modelos matemáticos. En general
cualquier modelo no es más que la representación de la realidad y por consiguiente, no
incluye todos los aspectos del problema.
La IS es una forma de resolver problemas. La solución es un modelo del sistema, una
serie de especificaciones para idear, diseñar e implementar. A veces la solución no siempre
es la mejor.
La METODOLOGÍA DE LA INGENIERÍA DE SISTEMAS se puede conceptuar utilizando una
serie de “etapas” conocidas como el ciclo de vida básico del sistema. Donde cada etapa se
caracteriza por una serie de actividades fundamentales que reciben el nombre de proceso básico de decisión.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
49

Las etapas representan la evolución del sistema desde su planeación inicial, hasta su
implementación y retiro.
La metodología de la IS requiere el uso de conceptos económicos, administrativos, sociales,
técnicos. Entonces se puede decir que tiene naturaleza interdisciplinaria. Este aspecto
lleva a un problema semántico que ha llevado a diferentes apreciaciones sobre la ingeniería
de sistemas.
La IS es solo un grupo de conceptos y técnicas (incluye probabilidad y estadística,
teoría de sistemas, teoría de optimización y algoritmos en general)
La IS es sinónimo de la teoría de la información, teoría de control o análisis de redes
eléctricas.
La IS es sinónimo de diseño, planeación o administración de un sistema.
3.7. CARACTERISTICAS DE LA INGENIERIA DE SISTEMAS
La ingeniería de sistemas tiene dos características importantes, éstas representan las
tendencias.
a) Tendencia a Cuantificar
AL utilizar técnicas de descomposición, identificación de parámetros, simulación,
programación matemática; se dice que ha hecho una contribución, pues hay una
tendencia a cuantificar el valor de las alternativas, componentes y soluciones del
problema.
El uso de los modelos matemáticos obliga a comparar alternativas bajo un criterio o
medida de valor común.
La TGS es un método más para resolver problemas.
b) Tendencias a resolver problemas de gran escala
La IS ha tenido éxito en aplicaciones a sistemas complejos tales como urbanismo,
desarrollo económico y otros. Se considera problemas de gran escala porque son
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
50
problemas que constan de muchos componentes y altamente interconectado,
frecuentemente difíciles
Con estas características y otras es posible hallar oposición a la IS, y es conveniente tomar
en cuenta estas consideraciones.
Especialista : una sola persona es capaz de conocer todo
Pragmático: La experiencia es lo que mas pesa y no hay manera de dejar lo que se
ha venido haciendo.
Escéptico: Los problemas son complejos, solucionarlos es difícil, entonces la IS es
un mito y sin futuro práctico.
Determinista: No se puede tener control sobre los problemas, entonces la IS e sun
juego de adivinanzas, puesto que se trabaja sobre suposiciones.
3.8. IMPLEMENTACION DE LA INGENIERÍA DE SISTEMAS
La implementación de la IS requiere de gran esfuerzo. También es importante formular lo
que tienen que realizar el IS, pues es:
un asesor que hace sugerencias al que tiene la responsabilidad de implementar el
sistema diseñado y creado.
Debe convencer que las ideas que se sugieren se tomen en cuenta.
3.9. ROLES DEL INGENIERO DE SISTEMAS
Los roles del Ingeniero de Sistemas son:
Identificador de necesidades y realizador de sistemas
Ser el enlace entre las necesidades del cliente y la idea de sistema
Arquitecto y jefe del diseño conceptual
Ser la persona líder con una visión del concepto de sistema y crear el enlace entre los
requerimientos del cliente, los requerimientos del sistema y la configuración del
sistema
Integrador
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
51

Para ver los puntos enteros y cómo cada parte está contribuyendo a la ejecución y
factibilidad del sistema como un todo. Por otro lado el ingeniero de sistemas debe
coordinar los esfuerzos de varias disciplinas y profesionales involucrados, de tal
manera que el resultado es un óptimo total para el sistema.
Analista y procesador de datos.
Para coleccionar datos desde varias fuentes y analizarlos como base para la toma de
decisiones.
Resolvedor de problemas y tomador de decisiones
El proceso de la ingeniería de sistemas involucra diversas tareas de decisiones y
resolución de conflictos en diferentes puntos de unión. Estos conflictos son
inicialmente profesionales y después personales, y reflejan diferentes puntos de vista,
interés, e inclinaciones en la creación del sistema.
Gestionador y administrador
En adición a ser un líder técnico, el ingeniero de sistemas debe ser un gestionador y
administrador. El debe trabajar con la gente, organizar el trabajo, motivarlos,
comunicarse con ellos y dialogar sobre sus necesidades.
3.9.1. CONOCIMIENTOS PRÁCTICOS DEL INGENIERO DE SISTEMAS
El ingeniero de sistemas trata de implementar la filosofía general de sistemas utilizando
técnicas cuantitativas para satisfacer un objetivo bien definido y formulado en cooperación
con el cliente.
Estas técnicas y herramientas dependen del tipo de aplicación específica, pero normalmente
se tiende a considerar:
Computadoras Modelos matemáticosAlgoritmos
3.9.2. INGENIERO IDEAL DE SISTEMAS
No está comprometido con los dispositivos que constituyen un sistema sino con el sistema en general.
Razonamiento, imaginación, análisis y síntesis. Creatividad Facilidad de las relaciones humanas y experiencia Conocimiento de los temas de probabilidad y estadística, lenguaje, economía,
psicología.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
52

3.10. CICLO BASICO DE UN SISTEMA
Para que un sistema sea útil debe satisfacer una necesidad. El ciclo básico de un sistema
comienza con la identificación de una necesidad y termina cuando el sistema se hace
obsoleto. Existen tres periodos: Planeación, adquisición y uso (ver Fig. 1.3)
Fig.1.3. Ciclo de vida de un sistema
Cualquier sistema real tiene un ciclo de vida:
Ejemplo:
Edificio 30 años
Avión 5 a 10 años
Barcos de 20 a 30 años
La IS abarca el ciclo de vida completo del sistema, pero tiende a enfatizar en el periodo de
planeación y la etapa de diseño del periodo de adquisición.
Por otro lado cada etapa del ciclo completo de un sistema se implementa utilizando el
proceso básico de decisión. Ver Fig. 1.4
Información
CICLO DE OPTIMIZACIÓN
Fig. 1.4. PROCESO BÁSICO DE DECISION
EJEMPLOS
1) Sistema Siembra
Ciclo de vida
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
PERIODO DE PLANEACION
PERIODO DE ADQUISICIÓN
PERIODO DE USO
Formulación del modelo
Síntesis alternativa
Análisis y prueba
Evaluación Decisión
53

Selección de Semilla
Selección de la tierra
Sembrado
Control de plagas y riegos.
Cosecha
Consumo
2) Sistema de Producción de muebles
Ciclo de vida
Diseño
Selección del material
Producción
Venta
3) Sistema de Edición de un Libro
Ciclo de vida
Preparar un libro.
Editar
Imprimir
Publicar
Distribuir
Vender
Usar (leer)
3.11. LA MATRIZ DE ACTIVIDADES
A menudo se considera a la matriz de actividades como un método de sistemas, que
permite integrar conocimientos. Permite analizar, bajo determinada secuencia lógica,
problemas complejos, es por esto que se considera algunas veces el análisis de sistemas.
Pasos
Fases
Definición
del
problema
Medición del
Sistema
Análisis de
datos
Modelado de
sistemas
Síntesis de
sistemas
Toma de
decisiones
Planeación de
programa
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
54

Planeación de
proyecto
Desarrollo del
sistema
Producción y
construcción
Distribución y
puesta en servicio
Operación o
consumo
Retiro
La primera dimensión lo constituye el tiempo (ciclo de vida TIEMPO), que se denomina
FASES algo más específico de los periodos. El método de solución del problema (proceso
básico de decisión, LOGICA) que se denomina PASOS. Cada elemento de la matriz
representa una actividad y esta definido en forma única por la intersección de una fase de un
proyecto y un paso de solución
Integrando ambos aspectos en un todo se puede llegar a establecer una visión MATRICIAL,
donde las etapas constituyen las fases del ciclo de vida de un sistema y el proceso básico de
decisión se divide en PASOS.
La Ingeniería de Sistemas significa aplicar los conocimientos de la Ingeniería en el paso de
la medición de la etapa de planeación.
Tomando en cuenta además las distintas disciplinas (tercera dimensión) que intervienen en
este proceso se puede llegar a lo que se considera como la metodología de la de la
ingeniería de sistemas.
3.11.1. CONSIDERACIONES PARA LA MATRIZ
Para cada paso deben intervenir un grupo de profesionales, pero no necesariamente pueden
intervenir todos en cada fase, eso depende del problema. Para cualquier fase una casilla
específica puede estar vacía.
FASES
Planeación del Programa. La planeación del programa que parte del grupo
multidisciplinario, debe determinar el sistema de actividades y proyectos que se
encuentran involucrados al interior del programa, se debe establecer la coherencia de
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
55

actividades y proyectos para lo cual se debe conformar una base de datos que tiene
la característica de incluir datos e información
Planeación del Proyecto. En la planeación del proyecto, el equipo multidisciplinario
debe concentrar todos los esfuerzos en un proyecto seleccionado o específico. Esto
significa que para un proyecto específico debemos recolectar datos e información ya
no genéricos sino puntuales y en consecuencia nuestra base de datos adquiere un
carácter especializado
Desarrollo del Sistema. Parte del hecho de haber formulado la decisión de
implementar el proyecto. El objetivo de esta fase es el de establecer un plan de
decisión que permita realizar el proyecto. En esta fase en general se debe tratar solo
con componentes y no con alternativas particulares o específicas. Debemos realizar
las especificaciones del proyecto y establecer la lista o el sistema de materiales o
recursos que serán necesarios para realizar el proyecto
Producción o Consumo. En esta fase se procede a implementar el proyecto en sí, el
cual comprende ya sea la producción de un artículo o la construcción de una obra o
maquinaria
Distribución o puesta en marcha. En esta fase se deben hacer llegar a los usuarios
el producto elaborado o se pone en servicio la obra o maquinaria construida
Consumo u Operación. Esta es la fase más importante o principal de un proyecto y
consiste en el consumo de lo elaborado, o bien en la puesta en operación de la
maquinaria u obra construida
Retiro. Que coincide con la puesta en servicio y operación de un nuevo producto u
obra o maquinaria en reemplazo del anterior
PASOS
Definición del Problema. En primer lugar se debe plantear las necesidades que se
requiere cubrir en cada una de las fases y en base a las mismas considerando el
conjunto de disciplinas involucradas de las mismas se procede a la definición del
problema
Medición del problema. Se debe establecer los objetivos de la fase en
consideración del conjunto de disciplinas involucradas en el o los problemas
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
56

planteados. Estos objetivos deben ser claros y precisos, los objetivos pueden surgir
del análisis de sistemas que se realiza por algún cliente específico, o bien si se trata
de una organización o institución, surgirá de las metas de la misma.
Los objetivos pueden ser de la más diversa índole, sin embargo tres son los tipos
más importantes: A) Objetivos netamente económicos, B) objetivos basados en la
distribución del ingreso, C) los objetivos sociales.
Los objetivos económicos son aquellos que se concretizan normalmente a través de
lograr el mayor rendimiento en una inversión, de lograr la minimización de los costos
de producción o lograr los máximos beneficios. Los objetivos económicos tienen la
característica de ser cuantitativos y por lo tanto susceptibles a modelación.
Los objetivos de distribución e ingresos tienen la característica de ser conflictivos es
decir que tratan de promover el bienestar de un grupo a expensas de otro grupo.
Estos objetivos también tienen las características de ser cuantitativos.
Finalmente los objetivos sociales, como su nombre lo indica están dirigidos hacia el
sistema de la sociedad involucrada en proyectos, son difíciles de cuantificar y
normalmente involucran salud, educación, vivienda. Estos objetivos al ser difíciles de
cuantificar y poseer un alto grado de subjetividad provocan el uso de índices para su
cuantificación.
En general los objetivos varían de acuerdo al proyecto y de acuerdo al problema.
En la medición del problema también se deben identificar las variables que
intervienen en la fase de coordinación realizado en un principio en un inventario de
variables.
Análisis de Datos. En el análisis de datos se realiza el procesamiento de la
información reunida durante la medición de sistemas. Dicho procesamiento se realiza
con una computadora. Su objetivo es descubrir las relaciones entre las variable con
ayuda del reconocimiento de patrones y evaluación estadística de parámetros.
Modelado de sistemas. El grupo de análisis de sistemas procede a ejecutar el paso
de modelado del sistema cuando en el paso anterior han llegado a determinar las
relaciones importantes entre variables. El objetivo del modelado es el establecimiento
de modelos que expliquen relaciones entre variable. Este es el paso más importante
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
57

en cualquier fase, ya que los resultados del análisis nunca podrán ser mejores que el
modelo que se emplee para el mismo. El modelo cambia de acuerdo con la etapa.
Síntesis de sistemas. En cada fase se especifica la mejor solución de acuerdo a
criterios de evaluación. En sistemas complejos debe simularse el comportamiento de
soluciones alternativas empleando modelos. Cuando la modelación es costosa utilice
el criterio para descartar, sin recurrir a la simulación de diversas alternativas.
Concentrar el esfuerzo en alternativas promisorias. No gastar más de lo que se
piensa obtener como beneficio. Divida las alternativas en clase. Determine las clases
más promisorias, luego explore soluciones dentro de dicha alternativa.
Toma de Decisiones. Para concluir con este paso, es importante establecer si entre
todas las medidas de efectividad existe o no compatibilidad, es decir si se mide o no
en la misma escala. Si todas tienen la misma escala para la toma de decisiones es
posible conformar una sola función objetiva que aglutina el efecto de las distintas
medidas de modo que utilizando alguna de las técnicas de optimización se pueda
seleccionar la acción adecuada.
Nota. El conocimiento de la metodología desde la definición del problema en la primera fase
hasta la toma de decisiones en la última fase, no es suficiente para resolver los problemas
de la vida real, para esto se requiere de conocimientos específicos de una o varias ramas de
la ciencia o la técnica que se complementa con la metodología del enfoque de sistemas
Cada fase requiere de la concreción de todos los pasos a su vez cada paso requiere el
empleo de ciertas metodologías para su concreción al margen de conocimientos de distintas
disciplinas.
EJERCICIO DE APLICACIÓN
PROYECTO AGRÍCOLA
Fases: Planeación del programa
Ver la viabilidad de usar un determinado terreno para producir
Definición del problema
o Objetivo. Aprovechar el potencial agrícola para el beneficio de los campesinos
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
58

Z1 P1
Z2 P2Z3 P3
P4 Z4
Medición del problema. Determinación de variables trascendentes, periodos de lluvia,
fuentes de riego, temperatura del terreno, dimensión del terreno, etc.
Análisis de Datos. Estudio de precipitación fluvial, estudio de suelo ( Hacer división del
terreno), Humedad, promedio de temperatura (max, min), Constitución de las fuentes,
capacidad de las fuentes, máquinas y planes
Modelaje. Se depura una relación con las variables que se constituyen en el sistema.
Producto terreno
Zi = Zonas
Pc= Producto
Síntesis. Obtenemos la relación costo/beneficio (x1, x2, x3,…,xi), determinamos sus
valores de efectividad (Xi)
Toma de decisiones. Escoger el Xi, a varias pruebas se les asigna una variante.
Pasos
Fases
Definición del
problema
Medición del Sistema
Análisis de datos Modelado de sistemas
Síntesis de sistemas
Toma de decisiones
Planeación de programa: Ver la
viabilidad de
usar un
determinado
terreno para
producir
Objetivo: Aprovechar
el potencial
agrícola de
la región
para
beneficio de
los
campesinos
Determinación de
variables
trascendentes,
periodos de lluvia,
fuentes de riego,
temperatura del
terreno, dimensión
del terreno, etc.
Estudio de la precipitación
pluvial, estudio del suelo,
(hacer division del terreno),
humedad, promedio de
temperatura (max,min),
constitución de las fuentes
capacidad de las fuentes,
máquinas y planes
Se depura
una relación
con las
variables que
se constituyen
en el sistema
Producto
terreno
Obtenemos la
relación
costo/benefici
o (X1,X2,
…,Xj),
determinamos
sus valores de
efectividad
(Xj)
Escoger el Xi,
a varias
pruebas se les
asigna una
variante.
Planeación
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
59

de proyecto
Desarrollo del sistema
Producción y construcción
Distribución y puesta en servicio
Operación o consumo
Retiro: de
una máquina
En una unidad
de producción
Retiro de
una unidad
de
producción
X o una
máquina Y
Objetivo:
Evitar que el costo
de mantenimiento y
operación aumente
Variables:Costo de operación
(CO)
Costo de
mantenimiento
(CM)
Costo de
Adquisición (CA)
Costo de Reventa
(CR)
- Sacar promedios de CO,
CM
- Agregar datos de CO,
CM
- Relacionar CO, CM, CA,
y CR
- Como esta la maquinaria
nueva (MN)
Modelo de
Reemplazo:
Costo
medio=(CA-
CM-CR)t
(t=1,2,3,..,n)
se debe
encontrar un
punto de
optimización,
cuando CM
disminuye ese
es el punto
optimo. Cm es
el menor que
el de CR.
Para el
periodo donde
CM-CR (costo
de
mantenimient
o menos costo
de reventa),
es menor al
CA (costo de
adquisición)
MATRIZ DE ACTIVIDADES
EJERCICIOS
1. Explique desde su punto de vista que es la Ingeniería de Sistemas
2. Explique con un ejemplo el ciclo de vida de un sistema.
3. Plantear un proyecto ecológico en todos sus pasos para la fase de operación o
consumo, en la matriz de actividades
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
60

4. Cuales son las disciplinas con las cuales se relaciona la Ingeniería de Sistemas
CAPÍTULO IV INGENIERÍA DE SISTEMAS I
MODELOSTodo estudio de un sistema tiene que estar basado en un modelo.
En este tema se ilustra la construcción de diversos tipos de modelos. Sin embargo, debe señalarse que en la construcción de modelos no existe ningún sustituto para la experiencia y los conocimientos.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
61

Modelo
SistemaRealObservado
El establecimiento de modelos es una mezcla de arte y ciencia. De todas maneras existen ciertas reglas que deben seguirse y sobre las mismas se hace referencia en este tema.
4.1. MODELO
Un modelo es la representación formal de un sistema.
Es una representación de la realidad que ayuda a entender cómo
funciona.
Es una construcción intelectual y descriptiva de una entidad en la
cual un observador tiene interés.
Se construyen para ser transmitidos.
Herramienta utilizada para responder preguntas
respecto al sistema sin tener que experimentar de forma real.
Un modelo constituye un cuerpo o conjunto de información relativo a un sistema con
fines de estudio. Como el cuerpo de información del mismo sistema puede ser diferente
para distintos profesionales está claro que cada uno de ellos obtendrá un modelo
distinto para un mismo sistema.
Un modelo constituye la representación formal de una teoría o bien la explicación
formal de las observaciones empíricas de que dispone un profesional.
Un modelo puede definirse como una representación simplificada de carácter
cualitativo o cuantitativo de un sistema. Este sistema puede estar ya funcionando, o
se puede estar diseñando. En el primer caso se emplea el modelo para obtener un
conocimiento de su operación y su estado futuro. En el segundo caso el modelo se usa
para el diseño del sistema. Un modelo de un sistema económico, pertenece al primer
tipo. El modelo puede emplearse para predecir cuál será el ingreso fiscal del año
siguiente. Esta información se requiere para determinar el programa de inversiones del
sector público para ese año. También pude usarse para determinar cómo responderá el
sistema a ciertos cambios en la política fiscal, y buscar de esta manera los cambios
que permitan al sistema alcanzar las metas que se han propuesto.
Algunos ejemplos de modelos son los siguientes:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
62

Modelo Mapa Maqueta Modelo
Conducta vestido
Modelo Matemático
Modelo Gráfico
4.2. IMPORTANCIA DE LOS MODELOS
La importancia de los modelos en la Ingeniería de Sistemas surge de los objetivos de la
misma, es decir investigar las irregularidades y el comportamiento de sistemas con el
objetivo de planear, diseñar y en caso extremo poner en marcha o construir el modelo en
estudio para establecer las regularidades en el comportamiento del sistema es necesario
establecer la abstracción la cual como vimos anteriormente da por resultado un modelo.
4.3. PROPOSITOS DE UN MODELO
Entre los propósitos que tiene un modelo podemos mencionar los siguientes:
1. Un modelo hace posible que un investigador organice sus conocimientos teóricos y sus
observaciones empíricas acerca del sistema en estudio y deduzca secuencias lógicas de
esta organización.
2. A través del modelo el investigador ve favorecido una mejor comprensión acerca del
sistema en estudio. Aprecia la necesidad de incluir o de excluir ciertos detalles y a su
vez le permite acelerar el proceso de análisis. Favorece a una mejor comprensión del
sistema en si.
3. Un modelo constituye un marco de referencia del sistema en estudio para poder probar la
aceptación o no de ciertas modificaciones en el sistema real.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
63
y=α+β⋅sen( x+ y )x= y+ y⋅x

4. Un modelo hace mas fácil la manipulación o el manejo del sistema en si y desde luego
permite controlar mas fuentes de variación que las que probablemente controla el
sistema real.
5. Un modelo permite que el trabajo con el mismo sea menos costoso que con el sistema
real, implica menos tiempo en su realización y nos permite experimentar con el sistema
real que seria impractico y a veces imposible.
4.5 CIRCUNSTANCIAS EN LAS QUE DEBEMOS MODELAR:
El sistema real no existe.
La realización del sistema es costosa.
La experimentación (real) es peligrosa.
Existe necesidad de simular.
No hay soluciones analíticas.
4.6 CARACTERÍSTICAS DESEABLES EN LOS MODELOS:
1. Exactitud (errores pequeños).
2. Realista (está basado en suposiciones correctas).
3. Robusto (inmune a errores de entrada, buen desempeño).
4. Generalizable.
5. Útil.
4.7 LIMITACIONES
Modelos complicados involucran muchas horas de trabajo
Entrega resultados sub-óptimos.
4.8 LA CONSTRUCCIÓN DE MODELOS
El construir modelos es un arte que requiere intuición, experiencia, etc., y también porque es
una ciencia que exige conocimientos tales como investigación de operaciones. Quizá tres
conceptos ayuden al desarrollo de esta habilidad para formular modelos:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
64

Primero: Es necesaria la construcción de modelos como un proceso adaptativo y evolutivo.
Se comienza con modelos muy simples, alejados de la realidad; después se modifican estos
modelos con el propósito de que incluyan, sucesivamente, un número mayor de los aspectos
importantes del problema. Este concepto quizá no cause gran impacto. Sin embargo, es
muy común que un modelador sin experiencia trate de comenzar con un modelo
relativamente complejo y que al final tenga que modificarlo casi en su totalidad.
Segundo: es muy útil hacer analogías con estructuras lógicas o modelos ya desarrollados
(tal vez para problemas no similares) para poder identificar el punto inicial del proceso
adaptativo o de evolución del modelo que se va a seguir. Frecuentemente, esta búsqueda de
analogías requiere la consideración de métodos o formulaciones generales tales como
ecuaciones diferenciales, teoría de la probabilidad, teoría de colas, etc.
Aunque estas analogías son muy importantes de suyo, aquí nos interesa identificar los pasos
que se deban tomar para descubrir si existe o no una analogía en la realidad.
Tercero: El proceso evolutivo de modelación incluye por lo menos dos tipos de
procedimientos iterativos (que se repitan):
Es necesario que se alterne entre la modificación del modelo y su evaluación o prueba
mediante la utilización de datos. Cada vez que se prueba el modelo, se obtiene una nueva
versión que requiere una nueva evaluación, etc.
Hay que alternar entre la exploración de nuevos métodos para obtener el objetivo junto con
cada versión del modelo y las suposiciones que se hicieron para obtenerlo. Si el modelo se
puede “resolver”, el modelador puede agregar más complejidad (realidad); si no se puede
“resolver”, entonces será necesario purificar y simplificar el modelo.
4.8.1 TAREAS BASICAS ASOCIADAS A LA CONSTRUCCION DE UN MODELO
Las tareas asociadas con la construcción de modelos son entre otras:
Establecer las suposiciones del sistema bajo estudio.
Determinar la estructura del sistema, es decir, definir las entidades, las actividades y si
es posible los parámetros.
Suministrar los datos, es decir los valores de los atributos definir las relaciones entre
las actividades utilizando sobre todo el análisis estadístico.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
65

Descripción del modelo y objetivos
Análisis del Sistema
Síntesis del sistema
Verificación del modelo
TAREA 1
Establecer claramente el problema que va a ser encarado, los objetivos que se persiguen y
las suposiciones acerca del sistema que están tomadas en cuenta para la construcción de
un modelo.
TAREA 2
Establecer la estructura del sistema en base a objetivos y suposiciones. Además se debe
tratar de establecer las actividades que se desarrollan en el sistema, incluyendo los
parámetros que serán tomados en cuenta en el modelo. Los parámetros se deben estimar
estadísticamente.
TAREA 3
Suministro de datos relativos al funcionamiento del sistema.
Básicamente las suposiciones son la que orientan el proceso de recopilación de datos,
mientras que el análisis de datos recopilados nos permite establecer la validez de nuestras
suposiciones.
Las suposiciones orientan al trabajo de la recopilación de los datos, mientras que el análisis
de datos nos permiten confirmar o refutar las suposiciones.
Para el establecimiento de un modelo se debe considerar dos elementos que son esenciales
y que se contraponen, por un lado: el realismo y por otro la simplicidad.
Al construir un modelo se aconseja aplicar el principio de parsimonia (tomar pocos
elementos relevantes).
4.8.2 ETAPAS EN LA CONSTRUCCIÓN DE MODELOS
Podemos ver en la Figura 1 las etapas de la construcción de un modelo.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
66

Fig.1 Etapas para la construcción de un modelo
Descripción del modelo y objetivos:
Una descripción verbal del problema. También otros autores lo denominan como la Etapa
de Formulación de los objetivos del modelo.
Es importante que el Ingeniero de Sistemas empiece a proyectarse a sí mismo en el
sistema y sienta casi intuitivamente cómo interactúan las ecuaciones partes o
componentes del sistema entre si.
Ejemplo: “Determinar un modelo que explique la inversión privada”.
Análisis del sistema:
Una vez formulado los objetivos del sistema en estudio y los modelos de comportamiento
se procede con el análisis del sistema cuya finalidad es la de aislar las partes y las
interrelaciones que están presentes en el sistema. Al analizar el sistema es importante
establecer que variables del sistema son las endógenas o internas y cuales son las
exógenas o externas.
Lo anterior se realiza en virtud de que la variación de las variables exógenas
independientes del sistema, en cambio la variación de las variables endógenas dependen
del sistema. Al establecer el modelo es necesario establecer relaciones funcionales que
determinen la variación de las variables endógenas y no así de las exógenas pues su
variación depende de factores externos.
Síntesis del sistema:
Se determina las relaciones entre variables, es decir se realiza una síntesis. _________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 67

Verificación del modelo:
Una vez establecidas las ecuaciones que representan al modelo en la mayoría de los
casos es necesario recurrir a métodos numéricos o de simulación y a la computadora
analógica o digital para resolverlo, teniendo que verificarse si el programa trabaja y si los
métodos numéricos o de simulación son los adecuados.
Validación del modelo:
Si todo ha marchado bien, se procede a validar el modelo, es decir se determina si los
resultados que se obtienen del modelo, coinciden con los que se han observado o con lo
que se espera tener.
Inferencias: Finalmente si la validación resultó adecuada, se puede emplear el
modelo para hacer inferencias, es decir para determinar lo que sucederá en el futuro, o lo
que sucedería si se cambiaran ciertas condiciones.
4.9 CALIDAD DE UN MODELO
La calidad o la validez de un modelo en general es dependiente de la exactitud o precisión
con que se reproduce el sistema original, en otras palabras un modelo será mucho mejor en
tanto en cuanto logre incluir en si todos los atributos y propiedades del sistema original que
son necesarios para el objetivo del sistema en estudio.
4.10 CLASIFICACION DE LOS MODELOS
Existe una variedad de clasificaciones de los modelos sin embargo vamos a clasificar a los
modelos de acuerdo a sus características tanto en:
Modelos estructurales
o Modelos materiales
Modelos tipo réplica
Modelos cuasi replica
Modelos analógicos
o Modelos formales
Modelos formales descriptivos
Modelos formales semánticos o simulativos_________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 68

xi yi
xi yi
Modelos formales formalizados
Analíticos
Numéricos
Siguiendo la clasificación de sistemas también se clasifican los modelos formales en :
Modelos deterministicos
Modelos Estocásticos
Modelos Dinámicos
Modelos funcionales.
Describiremos algunos de estos modelos a continuación:
Modelos Mentales: Depende de nuestro punto de vista, suelen ser incompletos y no
tener un enunciado preciso, no son fácilmente transmisibles. Ejemplo: las ideas,
conceptualizaciones.
Modelos Formales: Están basados en reglas son, transmisibles. Ejemplo: planos,
diagramas y maquetas.
• Estocásticos. Uno o más parámetros aleatorios. Entradas fijas produce salidas
diferentes.
Si el estado de la variable en el siguiente instante de tiempo no se puede determinar con
los datos del estado actual
Método analítico: usa probabilidades para determinar la curva de distribución de frecuencias
• Determinístico. Entradas fijas producen salidas fijas.
Si el estado de la variable en el siguiente instante de tiempo se puede determinar con los
datos del estado actual_________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 69

Método numérico: algún método de resolución analítica
• Estático. Estado del sistema como un punto en el tiempo. Si el estado de las variables
no cambian mientras se realiza algún cálculo
f [ nT ] = f [ n(T+1) ]
Método analítico: algún método de resolución analítica.
• Dinámico. Estado del sistema como cambios en el tiempo. Si el estado de las variables
puede cambiar mientras se realiza algún cálculo
f [ nT ] ≠ f [ n(T+1) ]
Método numérico: usa procedimientos computacionales para resolver el modelo matemático.
• Tiempo-continuo. El modelo permite que los estados del sistema cambien en cualquier
momento. El estado de las variables cambia continuamente como una función del tiempo
e = f (t).
•
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
70

Sistema Actual
Sistema Simulado
parámetros
entrada(t)
salida(t)
=??
salida(t)
Método analítico: usa razonamiento de matemáticas deductivas para definir y resolver el
sistema
• Tiempo-discreto. Los cambios de estado del sistema se dan en momentos discretos del
tiempo. El estado del sistema cambia en tiempos discretos del tiempo e = f(nT)
Método numérico: usa procedimientos computacionales para resolver el modelo matemático
4.11 SIMULACION
Es la construcción de modelos informáticos que describen la parte esencial del
comportamiento de un sistema de interés, así como diseñar y realizar experimentos
con el modelo y extraer conclusiones de sus resultados para apoyar la toma de
decisiones.
Se usa como un paradigma para analizar sistemas complejos. La idea es obtener una
representación simplificada de algún aspecto de interés de la realidad.
Permite experimentar con sistemas (reales o propuestos) en casos en los que de otra
manera
El sistema
simulado imita la operación del sistema actual sobre el tiempo.
La historia artificial del sistema puede ser generado, observado y analizado.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
71

ci
ni
ni
si
si
ei
eiei
La escala de tiempo puede ser alterado según la necesidad.
Las conclusiones acerca de las características del sistema actual pueden ser inferidos.
4.11.1 ESTRUCTURA DE UN MODELO DE SIMULACIÓN
ci: variable exógena controlable
ni: variable exógena no controlable
ei: variable endógena (estado del sistema)
si: variable endógena (salida del sistema)
4.11.2 CONDICIONES FAVORABLES PARA SIMULACIÓN
No existe una completa formulación matemática del problema (líneas de espera,
problemas nuevos).
Cuando el sistema aún no existe (aviones, carreteras).
Es necesario desarrollar experimentos, pero su ejecución en la realidad es difícil o
imposible (armas, medicamentos, campañas de marketing)
Se requiere cambiar el periodo de observación del experimento (cambio climático,
migraciones, población).
No se puede interrumpir la operación del sistema actual (plantas eléctricas, carreteras,
hospitales).
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
si = f(ci, ni)
72

EJERCICIOS
I. Diga a qué categoría (mental o formal) pertenecen los siguientes modelos:
1. Opinión sobre el nuevo gabinete.
2. Dibujo hecho a mano acerca de la nueva casa.
3. Plano de la nueva casa.
4. Modelo de clases o objetos del área de ventas.
5. Orden en que llegan los insumos a una máquina.
6. Distribución de probabilidad del orden en que llegan los insumos a una
máquina.
7. Orden que sigue un documento para ser aprobado.
8. Flujograma de aprobación de documentos.
II. Relaciona las siguientes dos listas. Identificar qué modelo(s) se usa(n) para representar los siguientes aspectos de la realidad. Indicar el tipo de modelo.
Realidad Modelo
1. Oficina Bancaria
2. Temperatura
3. Edificio
4. País
5. Empresa
6. Software
7. Epidemia
8. Reacción Nuclear
9. Energía
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
1. Termómetro2. Mapa3. Plano4. Organigrama5. Flujo Grama6. Diagrama Causal7. Cola M/M/18. Modelo Matemático9. E = mc2
73

III. Para los siguientes sistemas, determine a que categoría corresponde el modelo de acuerdo al tipo de variable o señal
Sistema Variable de Interés Continua / Discreta
Estocástica/
Determinística
Estática/ Dinámica
Control de inventarios Demanda, Pedido
Control de peaje Tiempo entre Llegada
Diagnóstico médico Tiempo de atención
Despacho de combustible Tiempo entre llegadas
Caja de un supermercado Número de productos
Fábrica de carros Tiempo entre fallas
Biblioteca Libros prestados
Mantenimiento de Maquinaria Tiempo sig. atención
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
74

CAPÍTULO V INGENIERÍA DE SISTEMAS I
MODELACIÓN MEDIANTE FUNCIONES DE TRANSFERENCIA
5.1. TRANSFORMADA DE LAPLACE
5.1.1. DEFINICIÓN Y CARACTERÍSTICAS:
La transformada de Laplace es un método que transforma una ecuación diferencial en una
ecuación algebraica más fácil de resolver.
F(t): una función del tiempo t tal que f(t) = 0 para t<0
S: una variable compleja
L: un símbolo operativo que indica que la cantidad a la que antecede se va a transformar
mediante la integral de Laplace.
F(s): transformada de Laplace
La transformada de Laplace se obtiene mediante:
El proceso inverso de encontrar la función del tiempo f(t) a partir de la transformada de
Laplace F(s) se denomina transformada inversa de Laplace.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
75

_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
76

_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
77

5.1.2. SISTEMAS CONTÍNUOS
Supóngase un sistema dinámico lineal contínuo como el de la figura 3.1, cuya relación entre
la entrada y la salida está descrita por la siguiente ecuación diferencial genérica:
(3.1)
o en forma resumida:
Al aplicar la Transformada de Laplace a esta ecuación se tiene:
De esta ecuación podemos despejar como:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
78

o de otra forma:
(3.2
)
La primera parte de la respuesta (respuesta de estado cero) depende de la entrada y
no de las condiciones iniciales. La segunda parte (respuesta de entrada cero), por el
contrario depende sólo de las condiciones iniciales y no de la entrada.
Otra clasificación corresponde a respuesta forzada (con la forma de la entrada) y respuesta
natural (con la forma debida al polinomio característico)
5.1.3. SISTEMAS DISCRETOS
Supóngase un sistema dinámico lineal discreto como el de la figura 3.2, cuya relación entre
la entrada y la salida está descrita por la siguiente ecuación de diferencias
genérica:
(3.3)
o en forma resumida:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
79

Al aplicar la Transformada a esta ecuación se tiene:
De esta ecuación podemos despejar como:
o de otra forma:
(3.4)
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
80

La primera parte de la respuesta (respuesta de estado cero) depende de la entrada y
no de las condiciones iniciales. La segunda parte (respuesta de entrada cero), por el
contrario depende sólo de las condiciones iniciales y no de la entrada.
Otra clasificación corresponde a respuesta forzada (con la forma de la entrada) y respuesta
natural (con la forma debida al polinomio característico)
5.2. MODELACIÓN MEDIANTE FUNCIONES DE TRANSFERENCIA
La aplicación del concepto de función de transferencia está limitada los sistemas descritos
mediante ecuaciones diferenciales lineales invariantes con el tiempo. Sin embargo el
enfoque de la función de transferencia se usa extensamente en el análisis y diseño de dichos
sistemas.
5.2.1. DEFINICIÓN Y CARACTERÍSTICAS:
La Función de Transferencia (FdT) de un sistema lineal es el cociente entre la transformada
de Laplace de la variable de salida y la transformada de Laplace de la variable de entrada,
considerando nulas las condiciones iniciales. Es decir la relación en el dominio de la
frecuencia Compleja entre Salida y Entrada con condiciones iniciales nulas
Es una representación matemática de los sistemas lineales donde la relación entre la
entrada y la salida es una ecuación diferencial lineal. Si el sistema se rige por la primera o la
segunda ecuación la función de transferencia será:
Generalizando para el primer caso:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
81

U(s) Y(s)F(s)
U(z) Y(z)F(z)
Figura 1 diagrama de bloques mínimo
U(s) Y(s)
F(s)
U(z)Y(z)
F(z)
Las expresiones
sólo son válidas si las condiciones iniciales son nulas. En este caso, es posible representar
gráficamente de dos formas:
Como un Bloque definido por la Función de Transferencia o , que recibe
una señal de entrada o y entrega una señal de salida o (ver
figura 1).
Como dos señales y (o y ) relacionadas entre sí por la función
de transferencia o (ver figura 2).
La primera de las opciones corresponde a un Diagrama de Bloques y la segunda a un
Diagrama de Flujo de Señal.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
Figura 2 Diagrama de flujo de señal mínimo
82

Ejemplos:
Características:
Polinomio característico: Las raíces se llaman polos del
sistema.
Las raíces del numerador se denominan ceros del sistema:
Un sistema físico es realizable si ai y bi son números reales y (tiene igual o
mayor número de polos que de ceros)
Se trata de una característica interna de cada sistema.
Es independiente de la entrada del sistema.
Conociendo la función de transferencia se puede encontrar la repuesta del sistema
para cualquier entrada.
5.2.2. FDT DE UN LAZO CERRADO
Sabiendo que la FdT de un sistema es , podemos encontrar la FdT de un
sistema realimentado a partir de la ecuaciones siguientes:
, resultando
5.2.3. FDT DE ANILLO ABIERTO
También podemos expresar el resultado anterior como:
De esta forma el diagrama de bloques nos quedaría de la siguiente manera:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
83

Donde se define como la función de transferencia de anillo abierto. Gracias al
diagrama anterior y la FdT de anillo abierto se consigue un estudio más directo del sistema
realimentado.
5.2.4. FDT PARA EL ERROR
Para ver la evolución de un sistema sólo nos hace falta saber la FdT del mismo y aplicarle
una entrada:
Pero a veces interesa saber como evoluciona el error del sistema (E(s)) en vez de la salida.
Entonces la FdT para estudiar el error es:
Y mediante esta FdT podremos saber la evolución del error aplicando:
5.2.5. FDT PARA EL ERROR EN UN SISTEMA REALIMENTADO
Para un sistema realimentado como el de la figura la FdT del error es:
Sabiendo
que:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
84

Obtenemos:
Lo que equivale a:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
85

CAPÍTULO VI INGENIERÍA DE SISTEMAS I
DIAGRAMAS DE BLOQUES
La metodología del enfoque de sistemas establece una secuencia lógica para la solución de la problemática de sistemas complejos por lo que constituye un complemento de acción de todo profesional en cualquier rama. La descripción del sistema parte del hecho de que sea cual fuese el sistema y sobare todo si es complejo el sistema está compuesto por subsistemas y cada uno de estos a su vez se halla compuesto por una variedad de componentes. Para efectuar la descripción gráfica de las interrelaciones de los componentes del sistema veremos los diagramas de bloques y las gráficas de flujos de señales.
6.1. INTRODUCCION
Un sistema de control puede constar de cierta cantidad de componentes. Para mostrar las
funciones que realiza cada componente se acostumbra usar representaciones esquemáticas
denominadas Diagrama en Bloques.
Un Diagrama de Bloques es por lo tanto una representación grafica de un sistema físico que
ilustra las relaciones funcionales entre los componentes del sistema. Este último rasgo
permite la evaluación de las contribuciones de los elementos individuales hacia la ejecución
completa del trabajo realizado por el sistema.
6.2. FUNDAMENTOS
Este tipo de diagramas emplea tres símbolos:
Bloque
Sirve para representar un sistema al que llega información (variable de entrada) y en el que
se produce información (variable de salida). Se lo identifica con una letra Mayúscula que da
el valor del bloque.
Señal Representativa de variables de entrada o salida.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
86

Descripción del Bloque
Punto de suma
x x+-y
Bloque
Punto de Tomaz
z
La dirección del flujo de información tiene dado por el sentido de la flecha. Se caracteriza
con una letra minúscula.
Sumador
Elemento que sirve para combinar dos señales de entrada generando una salida que es su
suma (o resta)
En general, un diagrama en bloque consta de una configuración especifica de cuatro tipos de
elementos: bloques, puntos, de suma, puntos de toma y flechas que representan el flujo
unidireccional de señales.
El significado de cada elemento se debe entender claramente de acuerdo con el diagrama
anterior.
Las cantidades en el dominio del tiempo representan con letras minúsculas.
Ejemplo 1.
r = r (t)
En este capitulo las letras mayúsculas se usan para las transformadas de Laplace
Ejemplo 2. R =R (s)
6.3. OPERACIONES ELEMENTALES
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
z
87

G
a ac c
b -b
Dos son las operaciones elementales definidas para los Diagramas en bloque. Una la que
define la función del bloque y que se esquematiza como sigue:
La variable de entrada es 'a', perfectamente individualizada por la dirección de la flecha. La
variable de salida es 'b' y la relación matemática entre ambas es:
B = Ga
Se quiere poner de manifiesto una relación causa-efecto. La variable de entrada 'a' influye
(causa) en el sistema determinado por el bloque G que genera una variable de salida
(efecto). Esta variable de salida es la consecuencia de la entrada 'a' y de la naturaleza del
sistema 'G'. Cada bloque tiene una sola entrada y una sola salida.
La combinación de señales se hace a través del sumador al que ingresan dos señales de
entrada y de la que resulta una salida, la suma (o resta) de las entradas:
c = a + b c = a – b
Cuando una de las señales se resta, debe indicarse explícitamente en la proximidad del
sumador con el signo '(-)'. Toda la representación de un sistema físico en el que existen
diversos subsistemas y en que se relacionan diversas variables se debe describir con estos
tres elementos.
A modo de ejemplo consideremos un tanque agitado continuo al que ingresa una corriente
F1 y sale una corriente F2. Mediante un flujo de vapor W que condensa en un serpentín se
transfiere calor haciendo que la corriente que ingresa a la temperatura T1 salga a una mayor
T2.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
a b
88

Hay diversas variables de entrada. Considérese T1 y W (se supone que solo éstas cambian).
Debido al cambio de estas entradas, la temperatura T2 cambiará. Se observa la acción de
dos causas (variables de entrada) y el efecto sobre una variable de salida T2 a través de un
sistema que en este caso es el tanque.
Para representar esta relación entrada-salida (causa-efecto) se puede emplear el siguiente
Diagrama en Bloques:
que matemáticamente se puede expresar como:
Salida = (Bloque 1) entrada 1 + (Bloque 2) entrada 2
T2 = G1 T1 + G2 W
y que puede interpretarse de la siguiente forma
T2 cambia como resultado de la influencia de cambios en T1 (una de las entradas) a través
del bloque G1 a lo que se le debe sumar la influencia de la otra variable de entrada W que
produce cambios en la salida a través del bloque G2. Tanto G1 como G2 representan la
influencia del sistema (en este caso el tanque con calefacción) sobre la variable de salida,
pero cada una considera la influencia de una variable de entrada
La representación con Diagramas en Bloques sirve exclusivamente para sistemas lineales,
es decir para aquellos en los que la influencia de diversas variables de entrada resultan igual
a la suma de las influencias individuales. No obstante esto, se puede extender este análisis a
sistemas no lineales._________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 89

Las ventajas de esta representación es que resulta fácil formar el diagrama en bloques
global de todo el sistema, colocando simplemente los bloques de sus componentes de
acuerdo con el flujo de señales. De esta forma es posible evaluar la contribución de cada
componente al comportamiento general de todo el sistema. El funcionamiento de un sistema
se puede ver más fácilmente examinan- do el diagrama de bloques, que analizando el
sistema físico en sí.
Un diagrama de bloques contiene información respecto al comportamiento dinámico, pero no
de la constitución física del sistema. En consecuencia, muchos sistemas distintos, sin
relación alguna entre ellos, pueden estar representados por el mismo diagrama de bloques.
6.4. ÁLGEBRA ELEMENTAL DE BLOQUES
Los diagramas en bloques representados por muchos bloques y señales intermedias pueden
simplificarse en un solo bloque cuyo valor es una función de los bloques individuales pero no
de las señales intermedias.
Para simplificar diagramas muy complejos se pueden emplear tres reglas elementales (y
toda otra que se deduzca a partir de ellas) que se presentan en la Tabla siguiente.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
90

Empleando estas reglas se puede simplificar diagramas integrados por diversos elementos
hasta llegar a una representación mínima.
A modo de ejemplo, se puede considerar el diagrama siguiente (muy difundido en Control de
Procesos) que consta de 4 bloques y 2 sumadores. Se pretende encontrar la relación entre
"r" (entrada) e "y" (salida) a través de un solo bloque equivalente.
Considerando los bloques en serie G1, G2 y G3 queda:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
91
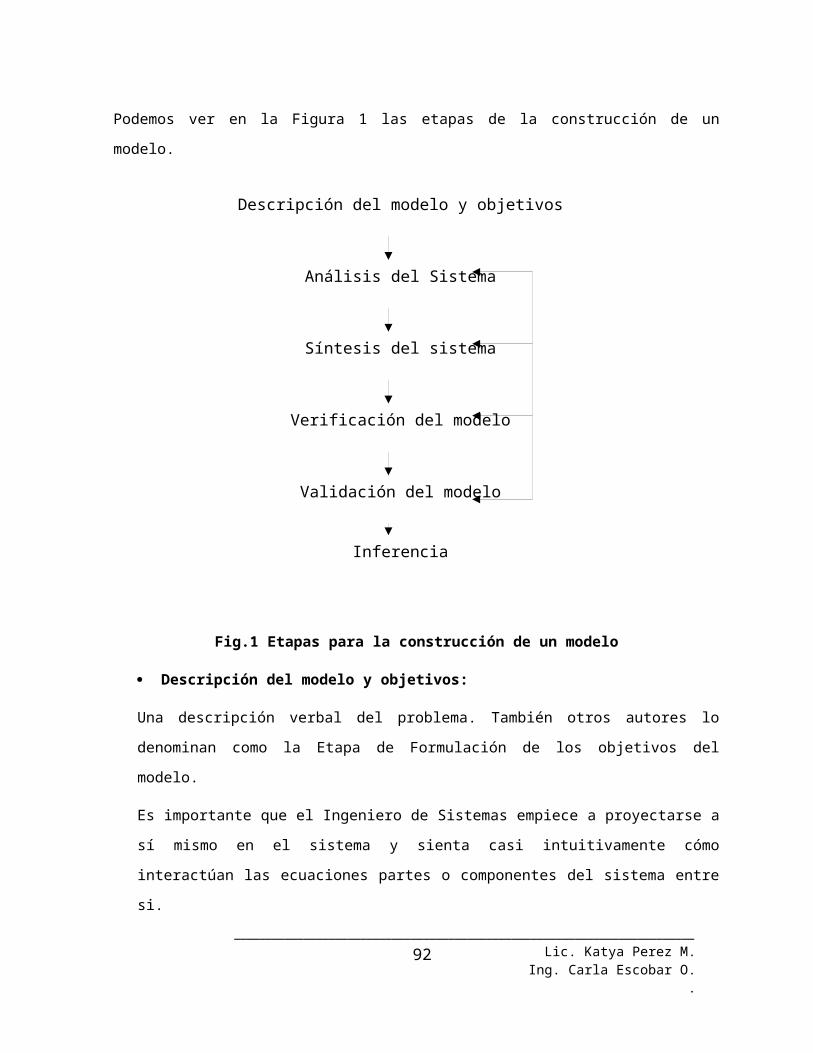
y resolviendo la realimentación:
o expresado en términos de ecuaciones:
y=G1G2 G3
1+G1G2 G3 Hr
Esto nos refiere a la conocida "Regla de Mason" que dice que cuando existe un lazo de
realimentación, la transferencia entre la entrada y la salida es igual al producto de todas las
transferencias en el camino directo entrada-salida dividido en 1 más el producto de todas las
transferencias incluidas en el circuito de realimentación (o 1 menos si la realimentación es
positiva).
6.5. TEOREMAS DE TRANSFORMACIÓN DE LOS DIAGRAMAS DE BLOQUE
Los diagramas de bloque de sistemas de control complicados se pueden simplificar usando
transformaciones que se pueden derivar fácilmente. Con el fin de dar una visión completa,
esta transformación se incluye en la siguiente ilustración de los teoremas de transformación.
La letra P se usa para representar cualquier función de transferencia y W, X, Y, Z, denotan
cualquier señal en el dominio s.
Transformación Ecuación Diagrama en Bloque Diagrama en Bloque
Equivalente
1. Combinación de
bloques en
cascada Y =(p1 P2
) X
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
P1 P2 P1 P2YX YX
92

2. Combinación de
bloques en
paralelo o
eliminación de un
lazo directoY=
P1 X±P2 X
3. Eliminación de
un bloque de la
trayectoria directa
Y=P1 X±P2 X
4
Y=P1( X±P2Y )
5Y=
P1( X±P2Y )
6.6. FORMA CANONICA DE UN SISTEMA DE CONTROL POR RETROALIMENTACIÓN
Los dos bloques en la trayectoria hacia delante del sistema de retroalimentación se pueden
combinar. Siendo G G1 G2, la configuración resultante se denomina forma canónica de un
sistema de control por retroalimentación. G y H no son necesariamente únicos para un
sistema particular.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
P1
P2
X Y
±
●
P1± P2 YX
+
P2p1p2
Y+
P1
P2
X Y ?
+
P 11±P 1P 2
YX
P21
p2Y+
93

G
H
ER +
B
C
+ -
Las siguientes definiciones de refieren a este diagrama en bloque.
Definición 1: G función de transferencia directa función de transferencia hacia
adelante.
Definición 2: H función de transferencia de retroalimentación.
Definición 3: GH función de transferencia de lazo, función de transferencia de lazo
abierto.
Definición 4:
CR
función de transferencia de lazo cerrado, razón de control.
Definición 5:
ER
razón de señal impulsora, razón de error
Definición 6:
BR
razón de retroalimentación primaria.
En las siguientes ecuaciones, el signo - se refiere a un sistema de retroalimentacion positiva
u el signo + se refiere a un sistema de retroalimentacion negativa.
CR
=
G1±GH
(1)
ER
=
11±GH
(2)
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
94

PR E C
G
R E C
H
● H1
GH
CR
●
+
BR
=
GH1±GH
(3)
La ecuación característica del sistema, el cual se determina a partir de
1±GH=0
es:
DGH±N GH=0(4)
Donde DGH
es el denominador y N GH
es el numerador de GH
6.6.1. SISTEMA DE RETROALIMENTACIÓN DE UNIDAD
DEFINICIÓN 7: Un sistema de retroalimentación de unidad es un sistema de
retroalimentación en el cual la retroalimentación primaria b es igual a la salida controlada c.
Ejemplo Para un sistema de retroalimentación y lineal de unidad:
Cualquier sistema de retroalimentación, con los elementos lineales solamente en el lazo de
retroalimentación, se puede poner en la forma de un sistema de retroalimentación de unidad,
usando la transformación 5.
Ejemplo
La ecuación característica para el sistema de retroalimentación de unidad determinado a
partir de 1 G = 0. es
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
95

G1
U
●G2
+
+
+R C
-
DG±N G= 0 (7.7)
DondeDG
es el denominador yN G
el numerador de G.
6.7. ENTRADAS MULTIPLES
A veces es necesario evaluar el trabajo ejecutado por un sistema cuando se aplican
simultáneamente varios estímulos en diferentes puntos del sistema.
Cuando están presentes entradas múltiples en un sistema lineal, cada una se reara
independientemente de las otras. La salida ocasionada por todos los estímulos actuando
conjuntamente se encuentra de la siguiente manera:
Paso 1: Igualar todas las entradas a cero excepto una.
Paso 2: Transformar el diagrama el bloque a la forma canónica, usando las transformaciones
de las sección anterior.
Paso 3: Calcular la respuesta debida a la entrada escogida actuando sola.
Paso 4: Repetir los pasos 1 a 3 para cada una de las entradas restantes.
Paso 5: Añadir algebraicamente todas las respuestas (salidas determinadas) en los pasos 1
a 5. Esta suma es la salida total del sistema con todas las entradas actuando
simultáneamente.
Se vuelve a insistir aquí en que el proceso de superposición anterior depende de si el
sistema es lineal.
Ejemplo: Determinaremos la salida C del siguiente sistema.
Paso 1: Sea U ≡ 0.
Paso 2: El sistema se reduce a:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
C R
96

G1 ●+R
-
G1 ●G2+
+
+R
U
-1
G1
●G2
+
+U
-1
CU
G1
●
-G2
+U
Paso 3: Según la ecuación (7.3) la salida debida a la entrada R es :
Paso 4a: Sea R = 0.
Paso 4b: Poner –1 dentro de un bloque para representar el efecto de retroalimentación
negativa:
Ordenar el diagrama en bloque:
Hacer que el bloque con –1 sea absorbido en el punto de suma:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
C R
C R=[ G1G2
1+G1G2]R
CU
97

CU
Paso 4c: Según la ecuación (7.3), la salida debida a la entrada U es:
CU=[ G2
1+G1G2]U
Paso 5: La salida total es:
C =
6.8. REDUCCION DE DIAGRAMAS EN BLOQUE COMPLICADOS
El diagrama en un bloque de un sistema simple de control por retroalimentación es a
menudo bastante complicado. Puede incluir varios lazos de retroalimentación o de
alimentación directa y entradas múltiples. Por medio de una reducción sistemática del
diagrama en bloque, cada sistema de retroalimentación de lazo múltiple se puede reducir a
una forma canónica. Las técnicas desarrolladas en los párrafos anteriores proporcionan los
medios necesarios.
Los siguientes pasos generales se pueden usar como una aproximación en la reducción de
diagramas en bloque complicados.
Paso 1: Combinar todos los bloques en cascada usando la transformación 1.
Paso 2: Combinar todos los bloques en paralelo usando la transformación 2.
Paso 3: Eliminar todos los lazos menores de retroalimentación usando la transformación 4.
Paso 4: Desplazar los puntos de suma hacia la izquierda u los puntos de toma hacia la
derecha del lazo principal, usando las transformaciones 7, 10y 12.
Paso 5: Repetir los pasos de 1 a4 hasta que se logre la forma canónica para una entrada
particular.
Paso 6: Repetir los pasos de 1 a 5 para cada entrada según sea necesario.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
C R+CU=[ G1G2
1+G1G2]R+[ G2
1+G1G2]U=[ G2
1+G1G2] .[G1R+U ]
98

G1 ●G4
+
+R +
G2
G3
H 1
-
H 2
● ●
C++
G1 G4
G1 G4
G2
G3
GG 31
●+
H 1
GG 41
HGGGG
141
41
1
●
+
+
Las transformaciones 3,5,6,8,9,y 11 a veces sin útiles y la experiencia con la técnica de
reducción determinara su aplicación.
Ejemplo:
Reducir el siguiente diagrama en bloque a una forma canónica.
Paso 1:
Paso 2:
Paso 3:
Paso 4: No se aplica.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
99

HGGGG
141141
GG 32
H 1
●+
-
R
H 2
C HGGGGGG
141
3241
1 R ●
-
+
R
GG 41●
+
+ +
GG 32
H 1
-
H 2
● C21
Paso 5:
Paso 6: No se aplica
Un requisito ocasional en la reducción de diagramas en bloque es el aislamiento de un
bloque particular de un lazo de retroalimentación o de alimentación directa. Esto es
conveniente para examinar más fácilmente el efecto de un bloque particular sobre el sistema
completo.
Al aislamiento de un bloque se puede llevar a cabo generalmente aplicando los mismos
pasos de reducción al sistema, pero con frecuencia en un orden diferente. Hay que tener en
cuenta también el cloque que se va a aislar no de puede combinar con otros.
Ordenar los puntos de suma (transformación 6) y las transformaciones 8,9 y 11 es
especialmente útil para aislar bloques.
Ejemplo
Reducir el diagrama en bloque del ejemplo 9 aislando el bloque H1.
Pasos 1y 2:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
100

GG 41 ●
+
+R
+
GG 32
H 1
-
H 2
●
C21
GGGG 3241 ●
-
+R +
GG 32
1H 1
+
H 2
●C2 1 12
GGHGG
GGGG3224
324
111
●
+R
GG 32
1H 1
+
C
En este momento no se aplica el paso 3, sino que se sigue directamente al paso 4,
moviendo el punto de toma 1 mas allá del bloque
Ahora se pueden ordenar los puntos de suma 1 y 2 y combinar los bloques en cascada en
el lazo directo usando la transformación 6, luego la 1:
Paso 3:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
G2+G3
1
G2+G3
101

GGHGGGG
3224
4
111
●
+GG 32
H 1
C
+
Finalmente se aplica la transformación 5 para quitar a del lazo de
retroalimentación:
Obsérvese que el mismo resultado se hubiera podido obtener después de aplicar el paso 2,
moviendo hacia delante el punto de toma 2 de , en lugar de mover el punto de
toma mas allá de
El bloque tiene el mismo efecto sobre la razón de control C/R, ya sea que
siga directamente a R o proceda directamente a C.
6.9. REPRESENTACIÓN DE ECUACIONES DIFERENCIALES
Una posibilidad interesante es que las ecuaciones diferenciales ordinarias lineales pueden
ser apropiadamente representadas con Diagramas en Boques. Esto permite entender los
mecanismos internos de sistemas cuyo comportamiento viene descrito por una o más
ecuaciones diferenciales. Como ejemplo se puede considerar la siguiente ecuación:
x1+Ax2− y=B dydt
Lo primero es dejar establecido cuáles son variables de entrada y cuáles de salida. Colocar a
la izquierda todas las entradas, dejando a la derecha la(s) salida(s). En el ejemplo, entradas
(x1, x2), salida y Asumiendo que A, B son constantes:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
R
G2+G3
G2+G3
102

El signo ∫¿ ¿
significa que la variable intermedia z al ser integrada en el tiempo resulta la salida
y. Efectivamente, si a la ecuación diferencial anterior la rescribimos, z sería:
x1+Ax2− yB
=z=dydy
⇒ y=∫ zdt
que es lo que se esquematizó en el Diagrama en Bloques.
6.10. PROCEDIMIENTO PARA TRAZAR DIAGRAMAS DE BLOQUES
Para trazar un diagrama de bloques de un sistema, primero se escriben las ecuaciones que
describen el comportamiento dinámico, de cada componente. Luego se toman las
transformadas de Laplace de estas ecuaciones, suponiendo condiciones iniciales cero, y
cada ecuación transformada de Laplace se representa individualmente en forma de bloque.
Finalmente se integran los elementos en un diagrama de bloques completo.
Ejemplo : Dado el siguiente circuito RC
PASO1.
Entidades:
vi(t): es la entrada de voltaje al sistema.
V0(t) es la salida del sistema.
C :Capacitor
Atributos:
i(t): flujo de corriente
Variables de Salida
V0(S), VR(S) y I(S)
Variables de Entrada:
Vi(S)
PASO 2. La leyes
1ª ley: “la suma algebraica de la suma de las intensidades de las corrientes que llegan a un
nudo es igual a cero”
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
103

I(S)
CS1 V0(S)
2ª ley: “La suma algebraica de las fuerzas electromotrices de una malla cualquiera es igual a
la suma algebraica de los productos de las intensidades por las respectivas resistencias”
PASO 3. Ecuaciones integro-diferenciales
La siguiente ecuación indica que el voltaje aplicado se equilibra por los voltajes desarrollados
debido al flujo de corriente i(t) a través del resistor R y del condensador C.
vi( t )=R⋅i( t )+1c∫0
t
i( t )dt
(1)
PASO 4. Aplicando Transformadas de Laplace.
Vi( S )=R⋅I ( S )+ 1C
I ( S )S
(2)
como :
V 0( S )= I ( S )CS
(3)
reemplazando la ecuación (3) en la ecuación (2) tenemos
Vi( S )=R⋅I ( S )+V 0 (S )
I (S )=Vi( S )−V 0( S )R
PASO 4.1. Representando individualmente cada ecuación en forma de bloque tenemos:
V 0( S )= I ( S )CS
I (S )=Vi( S )−V 0( S )R
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
104

V0(S)
Vi(S) R
1I(S)
-
+
Vi(S) R
1 I(S)
-
+
CS
1V0(S)
PASO 4.3. Integrando los elementos en un diagrama de bloques final.
PASO 5. Obtenemos la función de transferencia del sistema
G( S )=V 0 (S )Vi( S )
=
I (S )CS
R⋅I (S )+I ( S )CS
= 1RCS+1
Bibliografía
1. Balderrama, C. (2003). Ingeniería de Sistemas, Oruro Bolivia, Latinas Editores.
Requena, S. (1986). Dinámica de sistemas 1. Simulación pro Ordenador. Ed. Alianza. Pags.:
67-77
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
105

Delores M. Etter. 1997. Solución de Problemas de Ingeniería con Matlab. Segunda Edición.
Ed. Pretince may. Pags.
Richard C. Dorf. 1989. Sistemas Modernos de Control – Teoría y Práctica. Segunda Edición.
Ed. Addison Wesley. Pags.:
Katsuhiko Ogata. 1993. Ingeniería de control moderna. Segunda Edición. Segunda Edición.
Ed. Pretince Hall.
Distefano III Stubberud y Williams.1996. Retroalimentación y Sistemas de Control – Teoría y
680 Problemas Resueltosl.Ed. Serie Schaum – McGraw Hill.
D. J. Murray Smith. 1995. Continuous System Simulation. First Edition. Ed. Chapman & Hall.
Pags.
A. K. Mahalanabis. 1987. Introducción a la Ingeniería de Sistemas. Primera Edición. Ed.
Limusa.
EJERCICIOS
Aplicando las reglas del álgebra de bloques obtener la función de transferencia en los siguientes casos.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
106

G1 G22
G3 G4
G5
UY
-
+ +
+ - +
+
G1 G2 G3
G4
G5 G6
G7
U Y
+ - +
+ +
+
-
UG1 G2 G3
G4
G5
G6
G7
Y +
+
- + +
+
+
+ +
-
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
107

CAPÍTULO VII INGENIERÍA DE SISTEMAS I
DIAGRAMAS DE FLUJOS DE SEÑALESLa metodología del enfoque de sistemas establece una secuencia lógica para la solución de la problemática de sistemas complejos por lo que constituye un complemento de acción de todo profesional en cualquier rama. La descripción del sistema parte del hecho de que sea cual fuese el sistema y sobare todo si es complejo el sistema está compuesto por subsistemas y cada uno de estos a su vez se halla compuesto por una variedad de componentes. Para efectuar la descripción gráfica de las interrelaciones de los componentes del sistema veremos los diagramas de bloques y las gráficas de flujos de señales.
7.1. INTRODUCCIÓN
Para sistemas compuestos de mayor complejidad, es recomendable adoptar los métodos de
gráficas de flujo de señal, también llamadas gráficas dirigidas o digráficas, las cuales
eliminan la necesidad de mostrar los subsistemas como bloques rectangulares. Se transmite
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
108

+++
++
n5
n4
n3
n2
n1
G1 G2
G3
G6
G7
G4 G5
n3+
n1 n5n4n2y
G6
G7
G5
G3
G1G2 G4
n3
en esencia la misma información de los diagramas de bloques, usando líneas dirigidas,
denominadas ramas, en lugar de los bloques y pequeños círculos, llamados nodos, que
representan las variables o señales. Además, de la flecha sobre la rama, que indica la
dirección del flujo de la señal.
La siguiente figura presenta las relaciones básicas de un diagrama de flujo de señal. Nótese
que el énfasis se pone en la señal y no en el sistema, a diferencia de los diagramas de
bloques.
Con el propósito de explicar las definiciones básicas de los términos usados en la teoría de
las gráficas dirigidas, considérese el sistema de la siguiente figura:
u
y
La gráfica de flujo de señal de este sistema se muestra en la siguiente figura:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
u
109

7.2. CONCEPTOS
Nodo Fuente: Es aquel nodo del cual la señal fluye únicamente hacia fuera. Ejemplo:
el nodo u.
Nodo Sumidero: Un nodo que recibe únicamente señales de entrada. Ejemplo: el
nodo y.
Nodo Mixto: Un nodo que recibe y envía señales. Ejemplo: los nodos: n1, n2, n3, n4, n5.
Trayectoria: Conjunto de ramas interconectadas a lo largo del cual fluyen señales
sólo en una dirección.
Trayectoria Progresiva: Es aquella trayectoria que se origina en un nodo fuente y
termina en un nodo sumidero y a lo largo de la cual no se encuentra más de una vez
el mismo nodo. Ejemplo: la trayectoria: G1, G2 , G4, G5 o la trayectoria: G1, G3 , G5.
Trayectoria de Ganancia: Es el producto de las funciones de transferencia de todas
las ramas que constituyen la trayectoria.
Ciclo de Retroalimentación: Un ciclo de retroalimentación es aquella trayectoria que
se origina en un nodo mixto y termina en el mismo nodo, sin atravesar cualquier otro
nodo más de una vez. Por ejemplo: G6, G1G2G4G5G7 y G1G3G5G7.
Ciclo Ganancia: Es la trayectoria de ganancia de una trayectoria o ciclo de
retroalimentación.
Ciclos sin Contacto: Dos ciclos de retroalimentación se consideran sin contacto si no
hay un nodo común a estos dos ciclos.
Ejemplo x4 nodo de entrada
Nodos mixtos
d
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
110

x1
x2
x3 x4
a
b
c
x2X1
x4acbc
x
Y
m
1 b
Xn
Xk
X1
X2
Xj
….
A1k
A2k
Ajk
Ank
a x2 b x3 1 x3 x1 Nodo de entrada Nodo de salida (fuente) c (sumidero)
Ejemplo: La ley de Ohm establece que E =R*I donde E es un voltaje, I una corriente y R una
resistencia. La gráfica de señales para esta ecuación es:
R
I E
7.3. ALGEBRA DE GRAFICAS DEL FLUJO DE SEÑALES Y SIMPLIFICACIONES
La regla de adición
El valor de la variable que se designa por un nodo es igual a la suma de todas las
señales que llegan al nodo.
=
Ejemplo
Graficar la ecuación Y = mX + b
La regla de transmisión
El valor de la variable que se designa por un nodo, se transmite sobre cada rama que
parte del nodo. Es decir la ecuación:
Xi = Aik Xk i=1,2,…, n, k fijo
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
111
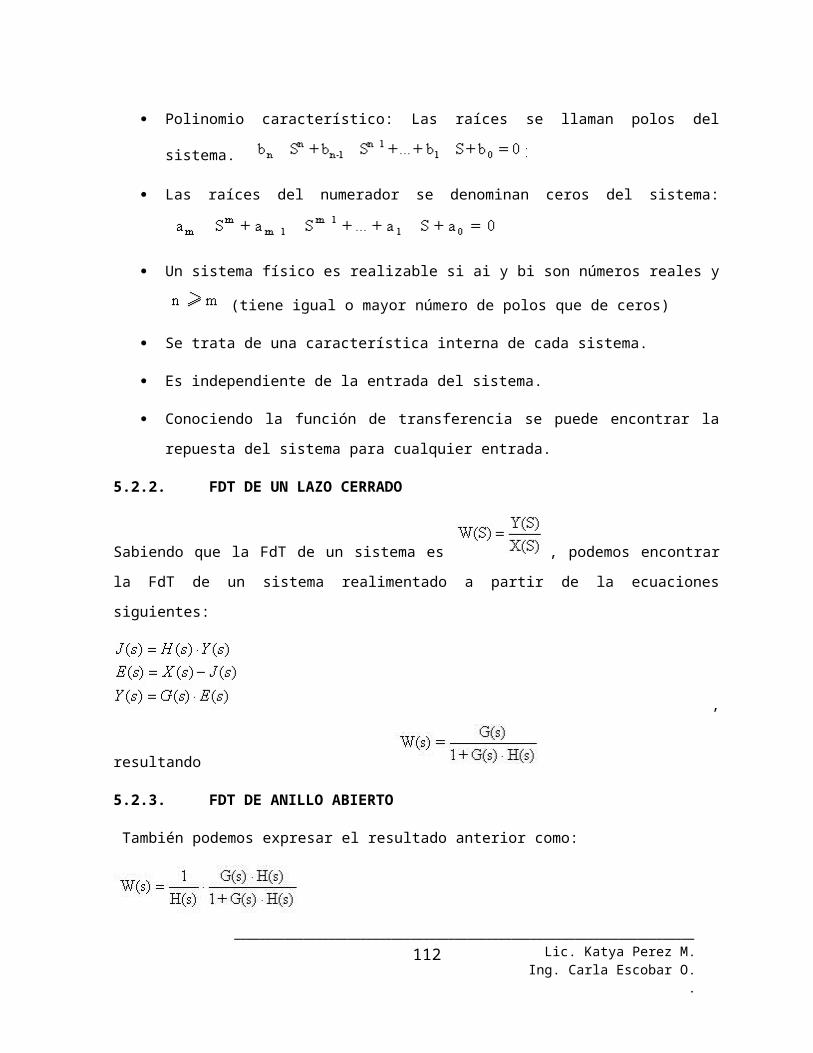
X
3
-4
Y
Z
X1 X2 X3
a b
X2 X3
ab
Ejemplo: graficar Y= 3x , Z = -4x
La regla de multiplicación
Una conexión en cascada (en serie) de n-1 ramas con funciones de transmisión A21,
A32, A43,…An (n-1) se puede reeplazar por una sola rama, con una nueva función de
transmisión igual al producto de las anteriores. Esto es,
Xn = A21*A32 *A43*….An(n-1) *X1
7.4. APLICACIÓN DE LA REGLA DE MASON
Para la obtención de la función de transferencia de un sistema a partir de su diagrama de
bloques es necesario desarrollar una habilidad específica debido a que no existe un
algoritmo para ello. Por el contrario, si se utilizan diagramas de flujo de señal sí se cuenta
con un procedimiento para la obtención de la función de transferencia conocido como la
regla de Mason.
La regla de Mason, que se explica en esta sección, emplea las definiciones que se presentan
a continuación y que se ilustran en el ejemplo que sigue
Camino directo
Conjunto de ramas que llevan de la entrada a la salida, sin repetirse.
Ganancia de camino directo _________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
.
…
112

Producto de las ganancias de las ramas que forman el camino directo.
Lazo cerrado
Conjunto de ramas que parten de un nodo y llegan a el mismo nodo, sin repetir ningún otro
nodo.
Ganancia de lazo cerrado
Producto de las ganancias de las ramas que forman un lazo.
Lazos adyacentes
Lazos que comparten al menos un nodo.
Lazos no adyacentes
Lazos que no comparten ningún nodo.
Ejemplo Considérese el diagrama de flujo de señal de la figura
Camino directo
Las figuras de los incisos (b) y (c) muestran los caminos directos.
Ganancia de camino directo
Las ganancias de camino directo Son:
Inciso (b):
Inciso (c): .
Lazo cerrado
Los incisos (d) a (f) de la figura muestran los lazos del ejemplo.
Ganancia de lazo cerrado
Las ganancias de lazo cerrado son:
Inciso (d):
Inciso (e):
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
113

Inciso (f):
Lazos adyacentes
Los lazos mostrados en los incisos (e) y (f) son adyacentes.
Lazos no adyacentes
Los lazos mostrados en los incisos (d) y (e) son no adyacentes
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
114

REGLA DE MASON
El cálculo de la función de transferencia de un diagrama de flujo de señal esta dado
por:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
115

Donde:
p= Número de caminos directos de a
= Ganancia del camino directo número
=1 - (Suma de ganancias de lazos cerrados) + (Suma de ganancias de lazos no adyacentes tomados de a 2) - (Suma de ganancias de lazos no adyacentes tomados de a 3) + (Suma de ganancias de lazos no adyacentes tomados de a 4)
: para el diagrama eliminando los lazos que tocan el camino número
Ejemplo Para el sistema de la siguiente figura la aplicación de la regla de Mason es como
sigue:
Sólo existe un camino directo (p = 1), cuya ganancia es:
T1 = G1 G2 G3 G4 G5
Existen cuatro lazos cerrados, cuyas ganancias son:
L1 = G1 H1
L2 = G4 H2
L3 = G6 H3
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
116

L4 = G2 G3 G4 G5 H4 G6 H5
Como existen 4 lazos, hay 6 posibles grupos de 2 lazos ( , , , ,
, ), pero de ellos, sólo son no adyacentes los siguientes:
Como existen 4 lazos, hay 4 posibles grupos de 3 lazos ( , ,
, ), pero de ellos, sólo hay uno que es no adyacentes:
Como existen 4 lazos, sólo hay un posible grupo de 4 lazos ( ), pero estos
son adyacentes.
De acuerdo con lo anterior, el valor de es:
Al eliminar los lazos que tocan el único camino directo sólo subsiste el lazo . Por lo
tanto resulta:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
117

Dado que sólo hay un camino directo, la función de transferencia se calcula como:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
118

EJERCICIOS
Aplicando la Regla de Mason obtener la función de transferencia en los ejercicios del capítulo anterior. Previamente deberá obtener el Diagrama de flujo de señal correspondiente.
CAPÍTULO VIII INGENIERÍA DE SISTEMAS I
MODELACION EN VARIABLES DE ESTADO
8.1. DEFINICIONES
Estado: El estado de un sistema dinámico es el conjunto más pequeño de variables de modo
que el conocimiento de estas variables en t=t0, junto con el conocimiento de la entrada para
t>=t0, determina por completo el comportamiento del sistema para cualquier tiempo t>=t0.
Variables de estado: Las variables de estado de un sistema dinámico son las que forman el
conjunto más pequeño de variables que determinan el estado del sistema dinámico.
Si se necesitan al menos n variables x1, x2... xn para describir por completo el
comportamiento de un sistema dinámico (por lo cual una vez que se proporciona la entrada
para t>=t0 y se especifica el estado inicial t=t0 el estado futuro del sistema se determina por
completo), tales n variables son un conjunto de variables de estado.
Vector de estado: Si se necesitan n variables de estado para describir por completo el
comportamiento de un sistema determinado, estas n variables de estado se consideran los n
componentes de un vector x. Tal vector se denomina vector de estado. Por tanto un vector
de estado es aquel que determina de manera única el estado del sistema x(t) para cualquier
tiempo t>=t0, una vez que se obtiene el estado en t=t0 y se especifica la entrada u(t) para
t>=t0.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
119

Espacio de estados: El espacio de n dimensiones cuyos ejes de coordenadas están
formados por el eje x1, eje x2..., eje xn se denominan espacio de estados. Cualquier estado
puede representarse mediante un punto en el espacio de estados.
8.2. FORMULACIÓN DE LA ECUACIÓN DE ESTADO DE UN SISTEMA
En el análisis en el espacio de estados, nos concentramos en tres tipos de variables en el
modelado de sistemas dinámicos:
Variables de entrada
Variables de salida
Variables de estado
Suponemos que un sistema de entradas y salidas múltiples contiene n integradores.
También suponemos que existen r entradas y m salidas. Definimos n salidas de los
integradores como variables de estado. El sistema se describe mediante:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
120

en donde la primera es la ecuación de estado y la segunda la ecuación de salida.
Si las funciones vectoriales f y g involucran explícitamente el tiempo t, el sistema se
denomina sistema variante con el tiempo.
Si se lineal izan las ecuaciones alrededor del estado de operación, tenemos las siguientes
ecuaciones de estado y de salida lineal izadas.
A(t) matriz de estado
B(t) matriz de entrada
C(t) matriz de salida
D(t) matriz de transmisión directa
Si las funciones vectoriales f y g no involucran el tiempo t explícitamente, el sistema se
denomina sistema invariante con el tiempo. En este caso las ecuaciones son:
En la figura se representa el diagrama de bloques del sistema de control lineal en tiempo
continuo representado en el espacio de estados.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
121

8.3. REPRESENTACIÓN DE ECUACIONES DIFERENCIALES EN EL ESPACIO DE
ESTADO
En la representación de ecuaciones diferenciales en el espacio de estado destacamos dos
casos: contiene y no contiene derivadas de la función excitación.
8.3.1. ECUACIONES DIFERENCIALES EN LAS CUALES NO CONTIENE DERIVADA DE
EXCITACIÓN
Representación en el espacio de estados de sistemas de n-ésima orden representados
mediante ecuaciones diferenciales lineales en las cuales no contiene derivadas de la función
de excitación.
Definimos:
A continuación, la ecuación se escribe como
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
122

Vemos que el valor de D es cero
8.3.2. ECUACIONES DIFERENCIALES EN LAS CUALES CONTIENE DERIVADA DE
EXCITACIÓN
Representación en el espacio de estados de sistemas de n-ésima orden representadas
mediante ecuaciones diferenciales lineales en las cuales contiene derivadas de la función de
excitación.
No se puede usar el método directo que utilizamos cuando no contenía derivadas de la
función de excitación. Esto se debe a que n ecuaciones diferenciales de primer orden en
donde x1= y, pueden no conducir a una solución única.
Una forma de obtener una ecuación de estado y una ecuación de salida es definir las
siguientes n variables como un conjunto de n variables de estado:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
123

Con esta elección de variables de estado está garantizada la existencia de una única
solución de la ecuación de estado.
En este caso D = ß0 = b0
8.4. FUNCIÓN DE TRANSFERENCIA ASOCIADA AL ESTADO DE UN SISTEMA
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
124

En esta sección tratamos la relación entre la función de transferencia y las ecuaciones en el
espacio de estado
8.4.1. CORRELACIÓN ENTRE FUNCIONES DE TRANSFERENCIA Y ECUACIONES EN
EL ESPACIO DE ESTADOS
A continuación mostramos como obtener la función de transferencia de un sistema de una
sola entrada y una sola salida a partir de las ecuaciones en el espacio de estado.
Consideramos el sistema cuya función de transferencia se obtiene mediante
Este sistema se representa en el espacio de estado mediante la ecuaciones siguientes:
en donde x es el vector de estado, u es la entrada y y es la salida.
La transformación de Laplace de las ecuaciones anteriores se obtienen mediante:
Dado que la función de transferencia de definió antes como el cociente entre la transformada
de Laplace de la salida y la transformada de Laplace de la entrada, cuando las condiciones
iniciales son 0, suponemos que x(0) es cero. Por tanto tenemos:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
125

Ésta es la expresión de la función de transferencia en términos A,B,C y D.
8.5. SOLUCIÓN DE LA ECUACIÓN DE ESTADO
En el estudio de la solución de las ecuaciones de estado encontramos dos casos:
homogéneo y no homogéneo, para cada uno de ellos se estudiará sus características
aplicando el enfoque de la transformada de Laplace.
8.5.1. SOLUCIÓN DE LAS ECUACIONES DE ESTADO PARA EL CASO HOMOGÉNEO
Para el caso homogéneo estudiamos de forma teórica sus características principales
aplicando un enfoque de la transformada de Laplace para la solución de las ecuaciones de
estado.
DESCRIPCIÓN:
Partimos de la ecuación diferencial matricial
Donde x = vector de dimensión n
A = matriz de coeficientes constantes de n*n
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
126

Suponemos que la solución está en la forma de una serie de potencias de vectores en t
Sustituyendo esta solución supuesta en la ecuación inicial, obtenemos:
Si la solución supuesta será la verdadera, debe ser válida para toda t. Por tanto, igualando
los coeficientes de las potencias iguales de t en ambos miembros de la ecuación,
obtenemos:
Sustituyendo t =0 en la ecuación, obtenemos:
Así, la solución x(t) se escribe como:
La expresión en el paréntesis es una matriz de n*n. Debido a su similitud con la serie infinita
de potencias para una exponencial escalar, escribimos:
8.5.1.1. ENFOQUE DE LA TRANSFORMADA DE LAPLACE PARA LA SOLUCIÓN DE
LAS ECUACIONES DE ESTADO
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
127

Partiendo de la ecuación diferencial escalar homogénea se extiende a la ecuación de estado
homogénea:
Tomando la Transformada de Laplace de ambos miembros, obtenemos
Premultiplicando ambos miembros de esta última ecuación por
La transformada inversa de Laplace de X(s) produce la solución x(t)
Por tanto la Transformada inversa de Laplace produce:
8.5.1.2. MATRIZ DE TRANSICIÓN DE ESTADO
Escribimos la solución de la ecuación de estado homogénea
como
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
128

A partir de estas ecuaciones obtenemos
Por tanto, podemos decir que (t) se denomina matriz de transición de estados. Siendo esta
matriz la que contiene toda la información acerca del movimiento libre del sistema.
Si los valores característicos de la matriz A son distintos, entonces
(t) contendrá las n exponenciales
En particular, si la matriz A es diagonal
Si hay una multiplicidad en los valores característicos como entonces
(t) contendrá además de las exponenciales , términos como
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
129

8.5.2. SOLUCIÓN DE LAS ECUACIONES DE ESTADO PARA EL CASO NO
HOMOGÉNEO
En este apartado estudiamos el caso no homogéneo para la solución de la ecuación de
estado, aplicando también el enfoque de la transformada de Laplace.
DESCRIPCIÓN:
Consideramos la ecuación de estado no homogéneo descrita mediante
x: vector de dimensión n
u : vector de dimensión r
A : matriz de coeficientes constantes de n*n
B : matriz de coeficientes constantes de n*r
Si escribimos la ecuación como
y premultiplicamos ambos miembros de esta ecuación por , obtenemos
Al integrar la ecuación entre t y 0
La ecuación también se escribe como
La solución x(t) es claramente la suma de un término formado por la transición de estados
inicial y un término que surge del vector de entradas.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
130

8.5.2.1. ENFOQUE DE LA TRANSFORMADA DE LAPLACE PARA LA SOLUCIÓN DE
ECUACIONES DE ESTADO
La solución de la ecuación de estado no homogénea:
También puede obtenerse mediante el enfoque de la transformada de Laplace. La
transformada de Laplace de esta última ecuación produce:
Premultiplicando ambos miembros de esta última ecuación por , obtenemos
La transformada inversa de Laplace se obtiene mediante la integral de convolución, del
modo siguiente:
Si el tiempo inicial no fuera cero sino t0, la solución sería:
Ejemplo
Sea el sistema mecánico de la figura. Se supone que el sistema es lineal. La fuerza externa
u(t) es la entrada al sistema y el desplazamiento y(t) de la masa es la salida. Calcular la
descripción del sistema en espacio de estados y su función de transferencia.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
131

Suponiendo que en ausencia de fuerza externa medimos el desplazamiento y(t) desde la
posición de equilibrio, obtenemos la ecuación:
Las variables de estado x1(t) y x2(t) se definen como:
Entonces tenemos que las ecuaciones de estado y de salida son:
Podemos escribir las ecuaciones anteriores de forma matricial:
De aquí podemos sacar los valores de las matrices A, B, C y D:
En la siguiente figura, representamos el diagrama de bloques de este sistema:
Vemos que las salidas de los integradores son las variables de estado.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
132

A continuación, hallamos la función de transferencia del sistema. Sabemos que:
Como
Tenemos que la función de transferencia es:
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
133

CAPÍTULO IX INGENIERÍA DE SISTEMAS I
ANÁLISIS CUALITATIVOS DE SISTEMAS
9.1. DEFINICIONES DE ESTABILIDAD
La estabilidad de un sistema se determina por su respuesta a las entradas o las
perturbaciones. Intuitivamente, un sistema estable es aquel que permanece en reposo a no
ser que se excite por una fuente externa y en tal caso, volverá al proceso una vez que
desaparezcan todas las excitaciones. La estabilidad se puede definir exactamente, en
términos de la respuesta al impulso de un sistema como sigue.
Definición 1a: Un sistema es estable si su respuesta al impulso tiende a cero a medida que
el tiempo tiende a infinito.
Alternativamente, la definición de un sistema estable se puede basaren la respuesta del
sistema a entradas limitadas, es decir, entradas cuyas magnitudes son inferiores a un valor
finito para todo tiempo.
Definición 1b: Un sistema es estable, si cada entrada limitada produce una salida limita.
La consideración del grado de estabilidad de un sistema, a menudo proporciona una valiosa
información sobre el comportamiento. Es decir, si un sistema es estable, ¿cuan cerca está
de ser inestable? Este es el concepto de estabilidad relativa. Generalmente, la estabilidad
relativa se expresa en términos de alguna variación permitida en un parámetro de un sistema
particular, para la cual el sistema permanecerá estable. Definiciones m{as precisas de
indicadores de estabilidad relativa se presentarán en capítulos posteriores.
9.2. LOCALIZACION DE RAICES CARACTERÍSTICAS
Una condición necesaria para que el sistema sea estable es que las partes reales de las
raíces de la ecuación característica, sean partes reales negativas. Esto asegura que la
respuesta al impulso decaerá exponencialmente con el tiempo.
Si el sistema tiene algunas raíces cuyas partes reales sean iguales a cero, pero ninguna raíz
con partes reales positivas, se dice que el sistema es marginalmente estable. En este caso, _________________________________________________________________________
Lic. Katya Perez M.Ing. Carla Escobar O.
. 134

la respuesta al impulso no decae hasta cero aunque la entrada es limitada. Por otra parte,
algunas entradas producirán salidas no limitadas. Por consiguiente, los sistemas
marginalmente estables son inestables.
Ejemplo 1
El sistema descrito por la ecuación diferencial en términos de trasformadas de Laplace
(s2 + 1) Y (s) = X (s)
Tiene la ecuación característica
S 2 + 1 = 0
Esta ecuación tiene la dos raíces j. Puesto que estas raíces tienen partes reales a cero, el
sistema no es estable. Sin embargo, el sistema es marginalmente estable puesto que la
ecuación no tiene raíces con partes reales positivas. Como respuesta a la mayoría de
entradas o perturbaciones, el sistema oscilará con un salida limitada. No obstante, si la
entrada es x=sen t, la salida será
y = t sen t
la cual no es limitada.
9.3. CRITERIO DE ESTABILIDAD DE ROUTH
El criterio de estabilidad de Routh es un método para determinar la estabilidad de un sistema
que se puede aplicar a una ecuación característica de n-ésimo orden de la forma
an sn + an-1 sn-1 + . . . + a1 s + a o
El criterio de aplica usando una tabla de Routh que se define como
sn an an-2 an-4 . . .
sn-1 an-1 an-3 an-5 . . .
. b1 b2 b3 . . .
. c1 c2 c3 . . .
. . . . . . . . . . . . . . . . . . . .
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
135

donde an + an-1 , . . . , a o son los coeficientes de la ecuación característica y
b1 b2
c1 c2
La tabla se continúa horizontal y verticalmente hasta que solo obtengan ceros. Cualquier fila
se puede multiplicar por una constante antes de calcular la siguiente fila, sin que esto vaya a
perturbar las propiedades del a tabla. Todas las raíces de esta ecuación característica tiene
partes reales negativas, si los elementos de la primera columna de la tabla de Routh tiene el
mismo signo. De lo contrario, el número de raíces son partes reales positivas es igual al
número de cambios de signo.
Ejemplo .2
S3 + 6S2 + 12S + 8 = 0
s3 1 12 0
s2 6 8 0
s1 64/6 0
s0 8
Puesto que no hay cambios de signo en la primera columna de la tabla, todas las raíces de
la ecuación tiene partes reales negativas.
A menudo se desea terminar un intervalo de valores de un parámetro particular del sistema,
para el cual el sistema es estable. Esto se puede hacer escribiendo las desigualdades que
aseguran que no habrá cambios de signo en la primera columna de la tabla de Routh del
sistema. Estas desigualdades especifican entonces el intervalo permitidos al parámetro.
Ejemplo 3
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
an-1 an-2 - an an –3an-1
an-1 an-4 - an an –5an-1
b1 an-3 - an –1 b2b1
b1 an-5 - an –1 b3b1
etc.
etc.
136

S3 + 6s2 + 12s + 8 = 0
s3 1 3 0
s2 3 1+K 0
s1 (8-K)/3 0
s0 1+K
Para evitar cambios de signo en la primera columna es necesario que se cumpla la
condiciones 8 – K > 0, y 1 + K > 0. Luego la ecuación característica tiene raíces como partes
reales negativas si -1 < K < 8.
Una fila de ceros para la fila s1 de la tabla de Routh indica que el polinomio tiene un par de
raíces que satisfacen la ecuación auxiliar formada como sigue:
As2 + B = 0
Donde A y B son el primero y segundo elemnto de la fila s2.
Ejemplo .4
En el ejemplo anterior, la fila s1 es cero si K = 8. En este caso la ecuación acuxiliar es 3s 2 +
9 = 0. Por tanto s = j 3 con dos de las raíces de la ecuación característica.
9.4. CRITERIO DE ESTABILIDAD DE HURWITZ
El criterio de estabilidad de Hurwitz es otro método para determinar si todas las raíces de
una ecuación característica tiene partes reales negativas. Este criterio se aplica pro medio
del uso de determinantes formados con los coeficientes de la ecuación característica. Se
supone que el primer coeficiente an, es positivo. Los determinantes t para i= 1 , 2 , . . . , n-1
se forman como los menores principales del determinante.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
137

an-1 an-3 ... a0 si n impar 0 ... 0
a1 si n par
an an-2 ... a0 si n impar 0 ... 0
n = a1 si n par
0 an-1 an-3 ............................................................... 0
0 an an-2 ............................................................... 0
............................................................................................................
0 ........................................................................................ a0
Los determinantes se forman como sigue:
1 = an-1
An-1 an-3
2 = an an-2 = an-1 an-2 - an an-3
An-1 an-3 an-5
3 = an an-2 an-4 = an-1 an-2 an-3 + an an-1 an-5 - an an2-3 - an-4 an
2-1
0 an-1 an-3
Y así sucesivamente hasta n-1.
Todas las raíces de la ecuación característica tienen partes reales negativas si t > 0 para i=
1,2, ... , n.
Ejemplo 5
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
138

Para n = 3,
a2 a0 0
3 = a3 a1 a0 = a2 a1 a0 - a02 a3
0 a2 a0
a2 a0
2 = a3 a1 = a2 a1 - a0 a3
1 = a2
De este modo, todas las raices de la ecuación característica tienen partes reales negativas si
a2 > 0, a2 a1 - a0 a3 > 0, a2 a1 a0 - a02 a3 < 0
9.5. CRITERIO DE ESTABILIDAD DE FRACCION CONTINUADA
El criterio de estabilidad de fracción continuada se puede aplicar a la ecuación característica,
formando una fracción continuada con las porciones pares e impares de la ecuación de la
siguiente manera. Sea.
Q (s) an sn + an-1 sn-1 + . . . + a1 s + a o
Q1 (s) an sn + an-2 sn-2 + . . .
Q2 (s) an-1 sn-1 + an-3 sn-3 + . . .
Se forma fracción Q1 / Q2, y luego se divide el numerador por el denominador y se invierte el
residuo para formar una fracción continuada como sigue:
= h1s + 1
h1s + 1
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
139

h1s + 1
h1s + 1
1
hns
Si h1, h2, ... , hn son positivos, entonces todas las raíces de Q(s) tienen partes reales
negativas.
Q(s) = s3 + 6s2 + 12s + 8
Ejemplo 5.6
Puesto que todos los coeficientes de s en la fracción continuada son positivos, v.gr. h i 0 1/6,
h2 = 9/16 y h3 = 4/3, todas las raíces del polinomio Q(s) tienen partes reales negativas.
PROBLEMAS RESUELTOS
DEFINICINES DE ESTABILIDAD
1. A continuación se dan las respuestas al impulso de varios sistemas. Determinar, para
cada caso, si la respuesta al impulso representa un sistema estable o inestable.
(a) h(t) = e-t , (b) h(t) = te-t , (c) h(t) = 1 , (d) h(t) = e-t sen 3t , (e) h(t) = senw t
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
140

Si la respuesta de la entrada decae hasta cero cuando el tiempo tiende a infinito, el sistema
es estable. Como se puede ver en la figura 1, las respuestas al impulso de (a), (b) y (d)
decaen hasta cero cuando el tiempo tiende a infinito y por tanto representa sistemas estable.
Puesto que las respuestas al impulso en los casos (c) y (e) no tienden a cero, éstas
representan sistemas inestables.
2. Si una función paso se aplica a la entrada de un sistema y la salida permanece por debajo
de cierto nivel durante todo el tiempo, ¿el sistema es estable?
El sistema no es necesariamente estable puesto que la salida debe ser limitada para cada
entrada limitada. Una salida limitada correspondiente a una entrada especifica limitada no
asegura estabilidad.
3. Si se aplica una función paso a la entrada de un sistema y la salida es de la forma y = t,
¿El sistema es estable o inestable?
El sistema es inestable ya que una entrada limitada produce una salida no limitada.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
141

LOCALIZACIÓN DE RAICES CARACTERÍSTICAS
4. Las raíces de las ecuaciones características de varios sistemas de dan a continuación.
Determinar en cada caso el conjunto de raíces representa sistemas estables, marginalmente
estable o inestables.
(a) –1, -2 (d) –1 +j, -1 –j (g) –6, -4, 7
(b) –1, +1 (e) –2 +j, -2 –j, 2j, -2j (h) –2 + 3j, -2 –3j, -2
(c) –3, -2, 0 (f) 2, -1, -3 (g) –j, j,-1, 1
Los conjuntos de raíces (a), (d) y (h) representan sistemas estables puesto que todas las
raíces tienen partes reales negativas. Los conjuntos de raíces (c) y (e) representan sistemas
marginalmente estable, ya que todas las raíces tienen partes reales no positivas, es decir,
negativas o iguales a cero. Los conjuntos (b), (f), (g) e (i) representan sistemas inestables
puesto que cada uno tiene por lo menos una raíz con una parte real positiva.
.5. Un sistema tiene polos en –1, -5 y ceros en 1 y –2, ¿Es estable el sistema?
El sistema es estable por que los polos que son las raíces de la ecuación característica del
sistema tiene partes reales negativas. El hecho de que el sistema tenga un cero con una
parte real positiva no afecta su estabilidad.
6. Determinar si el sistema con la siguiente ecuación característica es estable:
(s + 1)(s + 2)(s – 3) = 0.
Esta ecuación característica tiene las raíces –1, -2 y 3, por tanto representa un sistema
inestable puesto que hay una raíz real positiva.
5.7. La ecuación diferencial de un integrador se puede escribir como sigue dy / dt = x.
Determinar si un integrador es estable.
La ecuación característica de este sistema es s = 0. Puesto que la raíz no tiene una parte
real negativa, un integrador no es estable. Como no tiene raíces con partes reales positivas,
un integrador es marginalmente estable.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
142
8. Determinar una entrada limitada que produzca una salida no limitada en un integrador.
La entrada x = 1 producirá la salida y 0 t, la cual no es limitada.
CRITERIO DE ESTABILIDAD DE ROUTH
9. Determinar si la siguiente ecuación característica representa un sistema estable:
s3 + 4s2 +8s + 12 = 0
La tabla de Routh para este sistema es
s3 1 8
s2 4 12
s1 5 0
s0 12
Ya que no hay cambios de signo en la primera columna, todas las raíces de la ecuación
característica tienen partes reales negativas y el sistema es estable.
10. Determinar si la siguiente ecuación característica tiene raíces con partes reles positivas:
s4 + s3 – s – 1 = 0
Observe que el coeficiente del término s2 es cero. La tabla de Routh para esta ecuación es
s4 1 0 -1
s3 1 -1 0
s2 1 -1
s1 0 0
s0 -1
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
143

El coeficiente para la fila s0 se obtuvo remplazando el 0 de la fila s1 por e y computando luego
el coeficiente de la fila s0 como
= - 1
Este procedimiento es necesario cuando se obtiene un cero en la primera columna. Como
hay un cambio de signo, la ecuación característica tiene una raíz con una parte real positiva.
La presencia de los ceros en la fila s1 indica que la ecuación característica tiene dos raíces
que satisfacen la ecuación auxiliar formada con la fila s2 como sigue: s2 – 1 = 0. Las raices de
esta ecuación son +1 y –1.
11. La ecuación característica de un sistema dado es
s4 + 6s3 + 11s2 + 6s + K = 0
¿Qué restricción se debe poner al parámetro K para asegurar que el sistema sea estable?
La tabla de Routh para este sistema es
s4 1 11 K
s3 6 6 0
s2 10 K 0
s1 (60 – 6K)/10 0
s0 K
Para que el sistema sea estable, se debe poner las siguientes restricciones en el parámetro
K:60 – 6K > 0 ó K < 10 y K > 0. Luego K debe ser superior a cero e inferior a 10.
12. Construir una tabla de Routh y determinar el número de raíces con partes reales
positivas, para la ecuación
2s3 + 4s2 + 4s + 12 = 0
La tala de Routh para esta ecuación se da a continuación. Aquí la fila s2 se divide por cuatro
antes de calcular la fila s1. La fila s1se divide entonces por 2 antes de calcular la fila s2.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
e( -1) – 0e
144

s3 2 4
s2 1 3
s1 -1 0
s0 8
Puesto que hay dos cambios de signo en la primera columna de la tabla de Routh, la
ecuación anterior tiene dos raíces con partes reales positivas.
CRITERIO DE ESTABILIDAD DE HURWITZ
5.13. Determinar si la ecuación característica siguiente representa un sistema estable o
inestable:
s3 + 8s2 + 14s + 24 = 0
Los determinantes de Hurwitz para este sistema son
8 24 0 8 24
3 = 1 14 0 = 2112, 2 = 1 14 = 88, 1 = 8
0 8 24
Puesto que cada determinante es positivo, el sistema es estable. Observe que el
planeamiento general del ejemplo 5.5, hubiera podido usarse para verificar la estabilidad en
este caso, sustituyendo los valores apropiados para los coeficientes a0, a1, a2 y a3.
14. ¿Para qué intervalo de K es estable el sistema con la siguiente ecuación característica ?
s2 + Ks + 2K –1 = 0
Los determinantes de Hurwitz para este sistema son
K 0
2 = 1 2K-1 = 2K2 – K = K(2K - 1), 1 = K
Para que estos determinantes sean positivos, es necesario que K > 0 y 2K – 1 > 0. Luego el
sistema es estable si K > ½.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
145

15. Un sistema esta diseñado para dar un rendimiento satisfactorio cuando la ganancia de un
amplificador K tiene el valor 2. Determinar cuánto varía esta ganancia antes de que el
sistema se vuelva inestable si la ecuación característica es
s3 + (4 + K)s2 + 6s + 16 + 8K = 0
Sustituyendo los coeficientes de la ecuación dada en las condiciones generales de
Hurwitz del ejemplo 5.5, proporciona los siguientes requisitos para la estabilidad:
4 + K > 0, (4 + K)6 – (16 + 8K) > 0, (4 + K)(6)(16 + 8 K) – (16 + 8K)2 > 0
Suponiendo que la ganancia del amplificador K no puede ser negativa, se satisface la
primera condición. La segunda y tercera condición se satisfacen si K es menor que 4. Luego,
con una ganancia de diseño de 2, el sistema podría tolerar un aumento de ganancia de un
factor de 2, antes de que se vuelva inestable. La ganancia puede caer a cero sin que esto
cause inestabilidad.
16. Determinar las condiciones de estabilidad de Hurwitz de las siguientes ecuaciones
características generales de cuarto orden, suponiendo que a4 es positivo
a4s4 + a3 s3 + a2 s2 + a1 s + a0 = 0
Los determinantes de Hurwitz son
A3 a1 0 0
a4 a2 a0 0
4 = 0 a3 a1 0 = a3(a2 a1 a0 – a3 a02) – a1
2 a0 a4
0 a4 a2 a0
a0 a1 0
3 = a4 a2 a0 = a3 a2 a1 - a0 a32 - a4 a1
2
0 a3 a1
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
146

a3 a1
2 = a4 a2 = a2 an3 - a4 a1
1 = a3
Las condiciones de estabilidad son entonces
a3 > 0, a3 a2 – a4 a1 > 0, a3 a2 a1 – a0 a32 – a4 a1
2 > 0, a3(a2 a1 a0 - a3 a0
2) – a12 a0 a4 > 0
REFERENCIAS
Delores M. Etter. 1997. Solución de Problemas de Ingeniería con Matlab. Segunda
Edición. Ed. Pretince may.
Richard C. Dorf. 1989. Sistemas Modernos de Control – Teoría y Práctica. Segunda
Edición. Ed. Addison Wesley.
Katsuhiko Ogata. 1993. Ingeniería de control moderna. Segunda Edición. Segunda
Edición. Ed. Pretince Hall.
Distefano III Stubberud y Williams.1996. Retroalimentación y Sistemas de Control –
Teoría y 680 Problemas Resueltosl.Ed. Serie Schaum – McGraw Hill.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
147

GlosarioMODELIZACIÓNLa modelización es el proceso científico mediante el cual se construye una representación o
modelo científico de la realidad. Tiene el propósito de servir de base para la puesta a prueba
de las hipótesis con las que se ha construido el modelo y mediante el método científico
acceder a un mayor conocimiento del sistema bajo estudio.
SIMULACIÓNSimulación es la experimentación con un modelo de una o un conjunto de hipótesis de
trabajo. Thomas H. Naylor la define así: "Simulación es una técnica numérica para conducir
experimentos en una computadora digital. Estos experimentos comprenden ciertos tipos de
relaciones matemáticas y lógicas, las cuales son necesarias para describir el
comportamiento y la estructura de sistemas complejos del mundo real a través de largos
periodos de tiempo". Una definición más formal formulada por R.E . Sannon es: "La
simulación es el proceso de diseñar un modelo de un sistema real y llevar a término
experiencias con el mismo con la finalidad de comprender el comportamiento del sistema o
evaluar nuevas estrategias -dentro de los limites impuestos por un cierto criterio o un
conjunto de ellos – para el funcionamiento del sistema".
ETAPAS PARA REALIZAR UN ESTUDIO DE SIMULACIÓNDefinición del sistema: Para tener una definición exacta del sistema que se desea simular, es
necesario hacer primeramente un análisis preliminar del mismo, con el fin de determinar la
interacción con otros sistemas, las restricciones del sistema, las variables que interactúan
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
148

dentro del sistema y sus interrelaciones, las medidas de efectividad que se van a utilizar para
definir y estudiar el sistema y los resultados que se esperan obtener del estudio.
Formulación del modelo: Una vez definidos con exactitud los resultados que se esperan
obtener del estudio, se define y construye el modelo con el cual se obtendrán los resultados
deseados. En la formulación del modelo es necesario definir todas las variables que forman
parte de él, sus relaciones lógicas y los diagramas de flujo que describan en forma completa
el modelo.
Colección de datos: Es importante que se definan con claridad y exactitud los datos que el
modelo va a requerir para producir los resultados deseados.
Implementación del modelo en la computadora: Con el modelo definido, el siguiente paso es
decidir si se utiliza algún lenguaje como el fortran, algol, lisp, etc., o se utiliza algún paquete
como GPSS, simula, etc., para procesarlo en la computadora y obtener los resultados
deseados.
Validación: A través de esta etapa es posible detallar deficiencias en la formulación del
modelo o en los datos alimentados al modelo. Las formas más comunes de validar un
modelo son: i) La opinión de expertos sobre los resultados de la simulación, ii) La exactitud
con que se predicen datos históricos, iii)La exactitud en la predicción del futuro, iv) La
comprobación de falla del modelo de simulación al utilizar datos que hacen fallar al sistema
real, v) La aceptación y confianza en el modelo de la persona que hará uso de los resultados
que arroje el experimento de simulación.
Experimentación: La experimentación con el modelo se realiza después que éste haya sido
validado. La experimentación consiste en generar los datos deseados y en realizar un
análisis de sensibilidad de los índices requeridos.
Interpretación: En esta etapa del estudio, se interpretan los resultados que arroja la
simulación y con base a esto se toma una decisión. Es obvio que los resultados que se
obtienen de un estudio de simulación ayuda a soportar decisiones del tipo semi-estructurado.
Documentación: Dos tipos de documentación son requeridos para hacer un mejor uso del
modelo de simulación. La primera se refiere a la documentación del tipo técnico y la segunda
se refiere al manual del usuario, con el cual se facilita la interacción y el uso del modelo
desarrollado.
TEORÍA DE SISTEMASLa teoría general de sistemas o teoría de sistemas (TGS) es un esfuerzo de estudio
interdisciplinario que trata de encontrar las propiedades comunes a entidades, los sistemas,
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
149

que se presentan en todos los niveles de la realidad, pero que son objeto tradicionalmente
de disciplinas académicas diferentes. Su puesta en marcha se atribuye al biólogo austriaco
Ludwig von Bertalanffy, quien acuñó la denominación a mediados del siglo XX.
SINERGIALa sinergia es la integración de elementos que da como resultado algo más grande que la
simple suma de éstos, es decir, cuando dos o más elementos se unen sinérgicamente crean
un resultado que aprovecha y maximiza las cualidades de cada uno de los elementos.
Podemos decir que la palabra sinergia proviene del griego y su traducción literal sería la de
cooperación; no obstante (según la Real Academia Española) se refiere a la acción de dos (o
más) causas cuyo efecto es superior a la suma de los efectos individuales. La encontramos
también en biología, cuando se refiere al concurso activo y concertado de varios órganos
para realizar una función. Su traducción al inglés es la palabra synergy.
SISTEMA URBANOSe llama sistema urbano al conjunto de componentes dinámicos que componen una ciudad
y sus interrelaciones. Estos componentes dinámicos puede caracterizarse en dos grandes
conjuntos: 1) La sociedad con sus necesidades, hábitos y cultura; y 2) el medio ambiente con
sus posibilidades, para satisfacer las necesidades del hombre en sociedad. Con la evolución
de las sociedades en relación con su medio ambiente, los sistemas urbanos han devenido
más complejos.
CAUSALIDADTodo suceso se origina por una causa. Para que un suceso A sea la causa de un suceso B
se tienen que cumplir tres condiciones: i) que A suceda antes que B, ii) que siempre que
suceda A suceda B, iii) que A y B estén próximos en el espacio. El observador, tras varias
observaciones llega a creer que puesto que hasta ahora siempre que ocurrió A se ha dado
B, en el futuro ocurrirá lo mismo. Nunca hay observaciones suficientes para relacionar A con
B.
HOLISMOEl Holismo (del griego holos que significa todo, entero, total) es la idea de que todas las
propiedades de un sistema (biológico, químico, social, económico, mental, lingüístico, etc) no
pueden ser determinadas o explicadas como la suma de sus componentes. El sistema
completo se comporta de un modo distinto que la suma de sus partes.
Se puede definir como un tratamiento de un tema que implica a todos sus componentes, con
sus relaciones obvias e invisibles. Normalmente se usa como una tercera vía o nueva
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
150

solución a un problema. El holismo enfatiza la importancia del todo, que es más grande que
la suma de las partes y da importancia a la interdependencia de las partes.
DINAMICA DE SISTEMASLa dinámica de sistemas es una aproximación a la modelización de la dinámica de
sistemas complejos, tales como las poblaciones biológicas o los sistemas económicos, en
los que las partes interaccionan enérgicamente unas con otras. Fue fundada a principios de
la década de 1960 por Jay Forrester, de la MIT Sloan School of Management (Escuela de
Administración Sloan, del Instituto Tecnológico de Massachusetts) con el establecimiento del
MIT System Dynamics Group (Grupo de dinámica de sistemas del I.T. de Massachusetts).
En esa época había empezado a aplicar lo que había aprendido con sistemas eléctricos a
toda clase de sistemas.
RETROALIMENTACIÓNLa retroalimentación es una propiedad de los sistemas con tratamiento holístico, referido a
la totalidad, que se alimenta a sí mismo o recicla parte de la energía disipadael sistema
retroalimentado tiene también fenómenos explícitamente detectados: autopoiesis, entropía,
homeostasis, holístico, isomorfismo, sinergia, triple hélice, introducidos o propios de
laestructura, como potenciadores de la capacidad del sistema. Al ser elementos estructurales
tienen capacidad operativa propia, no son datos sino cualidades.
LECTURAS COMPLEMENTARIAS
1. TEORIA GENERAL DE SISTEMASAngel Sarabia, Madrid, Libros de la Serie Azul, . Copyright 2007 ISDEFE, S.A. Todos los derechos reservados
http://www.isdefe.es/webisdefe.nsf/0/EFBB79D4D3E553EEC12570F90036F3EB?OpenDocument
2. INGENIERIA DE SISTEMASBenjamín Blanchard, Madrid, Libros de la Serie Azul. Copyright 2007 ISDEFE, S.A. Todos los derechos reservados
http://www.isdefe.es/webisdefe.nsf/0/82EADEE0A9248206C12570F90036DDCF?OpenDocument
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
151

3. DIAGRAMAS DE BLOQUESAntonio Flores T. Departmento de Ciencias, Universidad Iberoamericana,
MEXICO, September 23, 2002
4. MANUALES DE MATLAB
www.fiec.espol.edu.ec/investigacion/com-analog/documentos/ matlab .pdf –
www.universas.com/ matlab /documentacion/ matlab 60.pdf
5. SIMULINKhttp://voltio.ujaen.es/jaguilar/matlab/Manual%20Matlab_Simulink/manual%20simulink/SIM_00%20-%20indi.htm
6. Página Web de MATLAB-SIMULINK. MathWorks WebSite
7. Ejemplos MATLAB : Sistemas Realimentados
http://usuarios.lycos.es/automatica/Ejemplos/PAGS/TEMA2.htm
8. Mini tutorial de Matlab Guidehttp://www.ingelec.uns.edu.ar/icd2763/tut.doc
SUPERVIVENCIA DE SISTEMASLa supervivencia se la define como una existencia continuada. Generalmente los sistemas hechos por el hombre tienen un período de vida media. Cuales son los factores para su supervivencia o fracaso? A continuación se estudian dos factores de éxito y dos factores de fracaso de los sistemas.
ÉXITO FRACASOEstabilidad Mecanización ProgresivaAdaptabilidad Centralización
1 ESTABILIDADUn sistema es estable, si soporta cambios dentro de ciertos limites. También estabilidad implica limites en las perturbaciones que se supone que el sistema tiene que soportar.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
152

La estabilidad, hace referencia a: por un lado a un conjunto de comportamientos aceptables del sistema y por otra parte a un conjunto de supuestos comportamientos del medio ambiente. En ambos casos existe una relación entre el sistema y su medio ambiente.
2 ADAPTABILIDADEs la cualidad del sistema mediante la cual es capaz de evolucionar dinámicamente a pesar de los cambios de su medio ambiente, de manera que atraviesa diferentes estados en los que conserva su eficacia y orientación al objetivo que constituye su finalidad. La adaptación se lleva a cabo a través de procesos que transcienden a toda la estructura del sistema.
3 MECANIZACIÓN PROGRESIVAUn sistema puede pasar de un estado de estabilidad a otro llamado mecanización progresiva, donde las interacciones entre los elementos de un sistema decrecen a través del tiempo. el comportamiento del sistema se convierte en la suma de sus elementos, con la consiguiente degradación del sistema. Las acciones de cada elemento van dependiendo cada vez más de solo ellos mismos.
4 CENTRALIZACIÓNSe dice que un sistema está centralizado alrededor de un elemento, llamado parte principal, si los cambios que ocurren a este último tiene una mayor repercusión en el sistema total que los cambios en cualquier otro elemento.
La centralización progresiva conduce a la individualización progresiva, es decir, a la constitución de sistemas centralizados, en los cuales ciertas partes desempeñan un papel dominante en el sistema, determinando así el comportamiento de éste
CONCLUSIÓNSe dice que un sistema sobrevive si su transformación continúa convirtiendo las variaciones del medio ambiente en valores de sus variables de identificación que caigan en la región de su identificación como sistema.
La sobrevivencia del sistema, generalmente se debe a la existencia y efectividad de sus mecanismos de autorregulación y de la interrelación de sus elementos, permitiendo que se preserve la estructura del sistema.
_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
153

_________________________________________________________________________Lic. Katya Perez M.
Ing. Carla Escobar O..
154