dosier módulo iminedupedia.mined.gob.sv/lib/exe/fetch.php?media=files:d... · 2019-06-28 ·...
TRANSCRIPT

Dosier módulo I

2

3
Módulo I
FUNDAMENTOS DE FÍSICA BÁSICA I
4
ÍNDICE
I. La materia en el Universo ............................................................................................................ 7
1.1 Propiedades Físicas de la Materia Ordinaria ................................................................................. 8
1.1.1 Propiedades extensivas ......................................................................................................... 8
1.1.2 Propiedades intensivas ......................................................................................................... 8
1.2 Patrones de medición ................................................................................................................... 9
1.2.1 El Metro patrón ..................................................................................................................... 9
1.2.1 El Kilogramo patrón............................................................................................................... 9
1.2.2 El segundo patrón ................................................................................................................. 9
1.2.3 El Kelvin ................................................................................................................................. 9
1.2.4 El Mol .................................................................................................................................... 9
1.3 Sistemas de unidades ............................................................................................................. 10
1.3.1 Magnitudes fundamentales y derivadas .................................................................................. 10
1.3.2 Prefijos del SI de medidas ................................................................................................... 11
Normas para el uso de los prefijos: ................................................................................................... 12
1.3.3 Unidades aceptadas ajenas al SI ......................................................................................... 13
1.3.4 Sistemas de unidades y factores de conversión ...................................................................... 13
1.3.4.1 Ejercicios propuestos sobre factores de conversión: ...................................................... 15
1.3.5 Análisis dimensional ................................................................................................................. 16
1.5 Mediciones. Medidas directas e indirectas ................................................................................. 16
1.5.1 Proceso de medición ................................................................................................................ 16
1.6 Análisis de errores ................................................................................................................... 18
1.7 Escalares y Vectores ................................................................................................................ 22
1.7.1 Operaciones con vectores: Suma y Resta. Método gráfico y Componentes Rectangulares
1.7.2 Suma y Resta de Vectores ................................................................................................... 23
1.7.3 Vector unitario .................................................................................................................... 24
1.7.3.1 Vector Unitario en la dirección de otro vector ................................................................ 24
1.7.4 Suma de vectores por componentes rectangulares ........................................................... 26
1.8 Cinemática en una dimensión. MRU y MRUV ....................................................................... 27
Rapidez y Velocidad ...................................................................................................................... 28
Rapidez media ............................................................................................................................... 28
Velocidad media ............................................................................................................................ 29
2.1 El concepto de fuerza .............................................................................................................. 30
2.2.1 Diagramas de fuerzas ........................................................................................................... 31
2.3 Leyes de Newton .................................................................................................................. 32
2.3.1 Primera Ley de Newton ........................................................................................................ 32

5
2.3.2 Segunda ley de Newton (Masa y Aceleración) ..................................................................... 32
2.3.3 Tercera ley de Newton ......................................................................................................... 32
1.3.4 Algunas Fuerzas específicas ................................................................................................. 32
1.3.4.1 Peso ................................................................................................................................... 32
1.3.4.2 Fuerza muscular ................................................................................................................ 33
1.3.4.3 Fuerza de contacto o de Reacción o Normal (Perpendicular) .......................................... 34
1.3.4.4 Fuerza de Fricción ............................................................................................................. 34
Torques.......................................................................................................................................... 36
Esfuerzo de torsión o torque debido a dos o más fuerzas no paralelas ....................................... 37
Centro de gravedad ....................................................................................................................... 38
Método práctico para localizar el centro de gravedad ................................................................ 39
Centro de masa y centro de gravedad .......................................................................................... 39
Método analítico para localizar el centro de gravedad ................................................................ 39
Máquinas simples .......................................................................................................................... 41
Trabajo realizado por una fuerza .................................................................................................. 41
Palancas ......................................................................................................................................... 43
Palancas de primera clase ............................................................................................................. 44
Palancas de segunda clase ............................................................................................................ 46
Palancas de tercera clase .............................................................................................................. 46
Poleas y sistemas de tracción* ...................................................................................................... 50
Poleas simples y combinación de poleas ...................................................................................... 50
Polea móvil: .................................................................................................................................. 52
Sistemas de tracción ..................................................................................................................... 52
El plano inclinado ......................................................................................................................... 54
Estructura atómica y carga eléctrica. ............................................................................................ 56
Carga eléctrica ............................................................................................................................... 57
Conductores y aislantes ................................................................................................................ 57
Electrostática ................................................................................................................................. 58
3.1 Métodos de carga estática ...................................................................................................... 58
Ley de coulomb. Fuerza eléctrica entre cargas puntuales ............................................................ 59
Campo eléctrico ............................................................................................................................ 59
Campos eléctricos producidos por cargas puntuales y placas paralelas ...................................... 60
Potencial eléctrico ......................................................................................................................... 61
Corriente eléctrica y flujo eléctrico ............................................................................................... 62
Circuitos eléctricos básicos: Ley de Ohm y Leyes de Kirchhoff ..................................................... 64
Resistividad y Conductividad ....................................................................................................... 66

6
INTRODUCCIÓN
Este dosier constituye un material de lectura de apoyo para un curso
introductorio básico de Física, en el que se abordan los aspectos más
importantes de la mecánica y el electromagnetismo. Se desarrollan los
principios que rigen el comportamiento físico de los sistemas mecánicos
y electromagnéticos a nivel conceptual, con una formulación
matemática no más de la geometría básica, un poco de algebra y la
representación vectorial de magnitudes físicas que satisfacen la
definición de vector. Se inicia en la Unidad I haciendo una revisión
rápida de los diferentes sistemas de unidades, las magnitudes físicas
escalares y vectoriales, en la Unidad II se estudian las leyes de Newton
del movimiento, en la Unidad III se presentan las máquinas simples y su
ventaja mecánica, y la aplicación de estos principios o leyes a la
motricidad humana y a la solución de problemas prácticos de aplicación
cotidiana, para finalizar con la Unidad IV sobre electromagnetismo, en la
que se aborda el campo de la electrostática de interacción entre cargas
en reposo (fuerza eléctrica, campo eléctrico y potencial eléctrico),
cargas en movimiento desde el punto de vista de la corriente eléctrica,
circuitos eléctricos sencillos.
7
UNIDAD I
La materia en el Universo y sus
propiedades
I. La materia en el Universo La física es el estudio del universo material, los conceptos básicos como materia, espacio y tiempo son difíciles de definir de manera conceptual. El concepto de materia está referido a todo aquello que es constituyente del universo observable y no observable. Todos los objetos observables están constituidos de materia, y lo que hace observable al universo y sus constituyentes, son las distintas formas en las que la materia se manifiesta. La materia tiene energía asociada a ella, es capaz de interaccionar, es decir, es medible y tiene una localización espacial y temporal compatible con las leyes de la naturaleza. La propiedad de la materia es que es observable, existen conceptos que corresponden a las propiedades básicas de la materia (como masa, carga, cantidad de movimiento y energía), otras que describen la ubicación de la materia en el espacio y tiempo (como el desplazamiento, velocidad y aceleración) o que pertenecen al comportamiento de la materia en conjunto (calor, corriente eléctrica, resistencia y presión) todos estos conceptos tienen significados científicos muy específicos. Todas las formas de materia tienen asociadas una cierta energía pero sólo algunas formas de materia tienen masa. Una gran parte de la energía del universo corresponde a formas de materia formada por partículas o campos que no presentan masa, como la luz y la radiación electromagnética, las dos formadas por fotones sin masa. A la forma de materia a la que se le puede asociar o determinar masa, el espacio que ocupa en un instante determinado recibe el nombre de materia ordinaria. La física actualmente se entiende como la ciencia de la naturaleza o fenómenos materiales, proviene del griego physis que significa naturaleza, estudia las propiedades de la materia, la energía, el tiempo, el espacio y sus interacciones.
8
Universo. Comprende todo lo que nos interesa e influye en el comportamiento de los sistemas formados por partículas o cuerpos. Para estudiarlo podemos dividirlo en:
1. Microuniverso. Para observarlo nos auxiliamos del microscopio y podemos ver el comportamiento de pequeñas partículas.
2. Universo cotidiano o real. Es el que observamos a simple vista y en donde ocurren los fenómenos que estudiaremos en este curso.
3. Macrouniverso o macrocosmos. Se observa con el telescopio y se estudia el comportamiento de los astros.
1.1 Propiedades Físicas de la Materia Ordinaria Una propiedad de la materia es una cualidad de la misma que puede ser apreciada por los sentidos o detectada y medida con aparatos de medición y detección, por ejemplo el color, la dureza, el peso, el volumen, etc. Las propiedades de la materia que pueden medirse y compararse entre sí, reciben el nombre de magnitudes físicas pueden agruparse en dos grandes categorías: extensivas e intensivas. 1.1.1 Propiedades extensivas Son aquellas propiedades de la materia que dependen de la cantidad de sustancia o del tamaño de un cuerpo, son magnitudes cuyo valor es proporcional al tamaño del sistema que describe y pueden ser expresadas como la suma de las magnitudes de un conjunto de subsistemas que formen el sistema original. La extensión es la propiedad por la cual, todos los cuerpos ocupan un lugar en el espacio. Debido a esta propiedad toda materia puede ser medida, y el espacio que ocupa se llama volumen. Ejemplos de propiedades extensivas: masa, longitud, área, volumen, capacidad calorífica, carga eléctrica, corriente eléctrica y otros. 1.1.2 Propiedades intensivas En física y química, las propiedades intensivas son aquellas que no dependen de la cantidad de sustancia o del tamaño de un cuerpo, por lo que el valor permanece inalterable al subdividir el sistema inicial en varios subsistemas, por este motivo no son propiedades aditivas. Muchas magnitudes extensivas, como el volumen, la cantidad de calor o el peso, pueden convertirse en intensivas dividiéndolas por la cantidad de sustancia, la masa o el volumen de la muestra; resultando en valores por unidad de sustancia, de masa, de longitud o de volumen respectivamente; ejemplos el volumen molar, el calor específico o el peso específico. Ejemplos de este tipo de magnitudes: Densidad de las sustancias, que se define como la relación de la masa de una sustancia y el
volumen que ocupa

9
La densidad superficial de carga, definida para un objeto eléctricamente cargado con una carga
superficial q,
.
El calor especifico, que se define como la capacidad calorífica por unidad de masa:
.
1.2 Patrones de medición En física, todo aquello que puede ser medido de alguna manera recibe el nombre de magnitud física. En el proceso de medición siempre se realiza una comparación entre el objeto a medir y otro objeto de la misma naturaleza, que se toma como patrón de comparación o patrón de medida. En principio, cualquier objeto puede ser tomado como patrón de medida, pero esto representa un serio problema cuando compartimos con otras personas el resultado de nuestras mediciones, pues el patrón de medición puede no ser conocido ni aceptado por otras personas. Estos inconvenientes han sido resuelto adoptando, patrones de medición estandarizados por parte de la comunidad científica. 1.2.1 El Metro patrón El metro es la unidad de longitud y se define de la forma siguiente: El metro es la longitud del camino recorrido por la luz en el vacío durante un tiempo de 1/299 792 458 de segundo. De esto se deduce que la velocidad de la luz en el vacío es exactamente c= 299 792 458 m/s. 1.2.1 El Kilogramo patrón El kilogramo es la unidad de masa y corresponde a un objeto fabricado de platino e iridoque se guarda en la Oficina Internacional de Pesas y Medidas de París. 1.2.2 El segundo patrón El segundo es la unidad de tiempo y se define como: la duración de9 192 631 770 periodos de la radiación correspondiente a la transición entre los dos niveles hiperfinos del estado fundamental del átomo de cesio 133, cuando éste está en reposo a una temperatura de 0 K. 1.2.3 El Kelvin El kelvin es la unidad de temperatura termodinámica y su definición se ha establecido como la fracción 1/273,16 de la temperatura termodinámica del punto triple del agua. 1.2.4 El Mol Es la unidad de la cantidad de materia y se define como la cantidad de materia de un sistema que contiene tantas entidades elementales como los átomos que hay en 0,012 kilogramos de carbono 12. Cuando se emplea el mol, las entidades elementales deben ser especificadas y pueden ser átomos, moléculas, iones, electrones u otras partículas o agrupamientos específicos de partículas.

10
1.3 Sistemas de unidades
Tabla 1 Sistemas de unidades utilizados actualmente. El Sistema Internacional de unidades (SI) basado en el sistema métrico decimal o MKS, ha sido establecido por la Conferencia General de Pesas y Medidas en sucesivas reuniones entre los años 1954 y 1995, su objeto es suministrar una serie de unidades básicas y derivadas que sean comunes a la ciencia, la tecnología y el uso común, así como normas para el uso correcto de estas unidades. El valor de una magnitud física cualquiera se expresa como un número seguido de una unidad, de tal forma que ese número es sólo un valor particular de la magnitud. Por ejemplo, si decimos que la velocidad de un vehículo es v= 54 km/h= 15 m/s estamos expresando el mismo valor de la magnitud velocidad usando 2 unidades distintas. El SI de unidades está formado por 7 unidades básicas y una serie de unidades derivadas. 1.3.1 Magnitudes fundamentales y derivadas Las magnitudes básicas o fundamentales que utiliza el SI son por definición independientes entre sí. Estas unidades son:
Tabla I.1 Unidades fundamentales en el SI
Las magnitudes derivadas son las que están formadas por productos de las unidades básicas (resultan de una operación matemática con unidades fundamentales).
Cantidad o magnitud
M.K.S. C.G.S. F.P.S.
Longitud (L) Metro (m) Centímetro (cm) Pie (ft)
Masa (M) Kilogramo(kg) Gramo (g) Libra (lb)
Tiempo (T) Segundo (s) Segundo (s) Segundo (s)
Fuerza(F) Newton (N) Dina Poundal (Pdl)
11
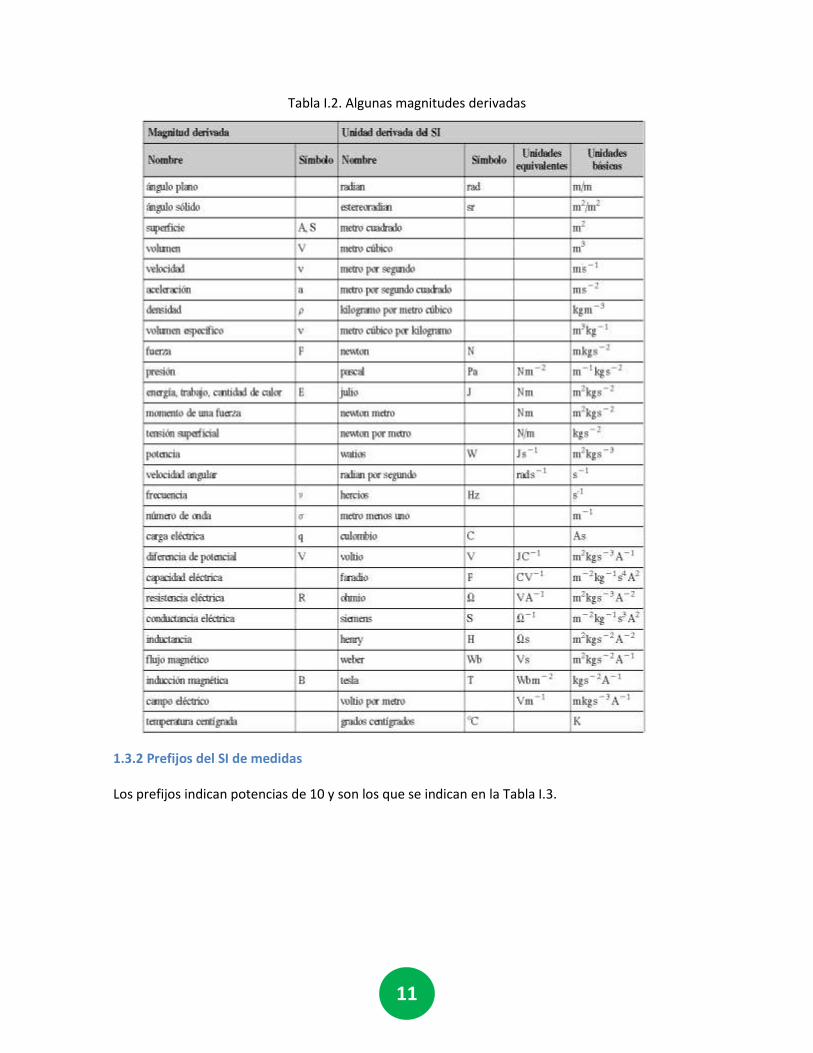
Tabla I.2. Algunas magnitudes derivadas
1.3.2 Prefijos del SI de medidas Los prefijos indican potencias de 10 y son los que se indican en la Tabla I.3.

12
Tabla I.3. Sufijos utilizados en el SI
Normas para el uso de los prefijos:
Está prohibido usar prefijos compuestos. Correcto es GV e incorrecto MkV.
No se puede usar un prefijo aislado sin la unidad correspondiente. Correcto kg y no k. Correcto 106/m3 y no M/m3.
Los exponentes de las unidades afectan al prefijo, es decir, 1 cm2=1 cm *1 cm = 10-4 m2 y no 10-2 m2, o sea un centímetro cuadrado y no la centésima parte de un metro cuadrado.
Los prefijos no se deben de usar como potencias de 2. Por ejemplo, 1 kbit = 1000 bit no 1024 bit.
La unidad básica de masa es el kilogramo que tradicionalmente se simboliza como kg, siendo la única que tiene un prefijo, sus múltiplos y divisores deben serlo del gramo, es correcto Mg
y mg y no es correcto kkgókg.

13
1.3.3 Unidades aceptadas ajenas al SI
Tabla I.4. Unidades ajenas al SI, pero aceptadas para su uso
1.3.4 Sistemas de unidades y factores de conversión Los sistemas de unidades son conjuntos de unidades convenientemente relacionadas entre sí que se utilizan para medir diversas magnitudes (longitud, peso, volumen, etc.). Universalmente se conocen tres sistemas de unidades: MKS o sistema internacional, cgs y Técnico. Las unidades correspondientes a las magnitudes (longitud, tiempo y masa) expresadas en cada uno de estos sistemas, se presentan a continuación. Un factor de conversión es una cantidad (entera o fraccionaria) que muestra la relación entre dos unidades de medición. Los factores de conversión son muy útiles para resolver problemas donde se utilizan fórmulas en que intervienen dos o más unidades diferentes o donde la respuesta requiere una unidad de medición diferente a la usada en el problema. A continuación se verán los factores para convertir unidades de un sistema a otro, principalmente del inglés al SI; agrupándolos por cada una de las cantidades más comúnmente utilizadas. También, se definirán las cantidades más importantes y se darán algunos ejemplos y fórmulas para calcularlas.

14
Tabla I.5
Con los datos de la tabla anterior, puede convertirse cantidades física expresadas en un sistema de unidades en otro. Para ello, con la tabla de equivalencias formamos lo que se conoce como factor

15
de conversión. La idea es bastante simple, partimos de una relación de equivalencia, como la siguiente:
Si dividimos ambos lados de dicha equivalencia por uno de los valores ya sea el de la derecha o el de la izquierda, formaremos así una relación equivalente a la unidad:
Por lo que multiplicar una cantidad cualquiera, por un factor de conversión, realmente es equivalente a multiplicar por la unidad, por lo que la magnitud física en términos de valor, no cambia, solo cambia el sistema de unidades en la que se encuentra expresada. Así, si deseamos convertir por ejemplo una velocidad v = 30 Km/h a m/s, solo debemos multiplicar 30 Km/h por dos factores de conversión formados por las equivalencias siguientes:
1 Km 1000 m y 1H 60 minutos 3600 s Para convertir los 60 Km/H a m/s procedemos así:
Solo multiplicamos los numerados y el resultado lo dividimos entre el producto de todos los denominadores, simplificando las unidades que se repiten en el numerador y en el denominador. Ejemplo: Un automóvil viaja a una velocidad de 75 km/hr ¿Qué velocidad lleva el automóvil en m/s? ¿Velocidad en ft/s? Sustituyendo las equivalencias respectivas, se tiene:
1.3.4.1 Ejercicios propuestos sobre factores de conversión:
1. A partir de la definición 1 pulgada = 2.54 cm, determine: a) Cuantos kilómetros hay en 1.00 milla y b) cuantos pies hay en 1.00 km.
2. Según la etiqueta de un frasco de aderezo para ensalada, el volumen del contenido es 0.473 litros (L). Use solo las conversiones 1 L =1,000 cm3 y 1 pulgada= 2.54 cm para expresar dicho volumen en pulgadas cubicas.
3. La densidad del plomo es 11.3 g/cm3.¿Cuál es su equivalencia en kilogramos por metro cubico?
4. Desarrolle por factor de conversión los siguientes ejercicios
16
A. Expresar 256 Días a horas. B. Expresar 5 millones de segundos a días. C. 1. 67 X 108 Minutos a mes D. 860 horas a semanas.
5. Para los siguientes ejercicios, seleccione la respuesta correcta: Convertir 12.3 millas a metros A) 1609 m B) 12000 m C) 12500 m D) 19794 m
6. Un edificio del centro de Toluca mide 80 m de altura ¿Que altura tiene en pies y pulgadas? 7. El agua de un rio tiene una rapidez media de 0.25 m/s en un bosque. ¿Cuantas millas viaja
el agua en una hora?
1.3.5 Análisis dimensional Este análisis consiste en que la unidades de una expresión matemática o formula se expresen en función de las unidades fundamentales L, M y T, y se determine que todas las cantidades sean homogéneas o compatibles.
Ejemplo: ¿Cuáles son las dimensiones de la siguiente ecuación? en dicha ecuación: Solución: Se sustituyen las dimensiones de cada una de las variables y se tiene:
que al simplificar nos da: Conclusión: como todos los términos tienen las mismas dimensiones (L) la ecuación es dimensionalmente correcta.
1.5 Mediciones. Medidas directas e indirectas 1.5.1 Proceso de medición La medición es una de las nociones que la ciencia moderna ha tomado al sentido común. El uso común de la idea de medida es tan natural en la conducta del hombre que a menudo pasa inadvertida, porque ésta surge de la comparación, y comparar es algo que el hombre hace diariamente con conciencia o sin ella. En la ciencia y en la técnica, la medición es el proceso por el cual se asigna un número a una propiedad física de algún objeto o fenómeno con propósito de comparación, siendo este proceso una operación física en la que intervienen necesariamente cuatro sistemas: El sistema objeto que se desea medir; el sistema de medición o instrumento, el sistema de comparación que se define como unidad y que suele venir unido o estar incluido en el instrumento, y el operador que realiza la medición. Por ejemplo, en el proceso llamado "medición de longitud" intervienen:
17
1. El objeto cuya longitud se quiere medir. 2. El instrumento que en este caso es una regla. 3. La unidad que está incluida en la regla. 4. El operador.
Para definir unívocamente el proceso de medición es necesario dar además la "receta" mediante la cual se deben poner en interacción el sistema objeto, el instrumento y la unidad. Por ejemplo, "la receta" para medición de longitudes seria: tómese un instrumento denominado regla en la que están marcadas cierto número de divisiones y hágase coincidir la primera división de la regla con el extremo del objeto cuya longitud se quiere determinar; finalmente, determínese la división que coincide con el otro extremo del objeto. Cada proceso de medición define lo que se llama una magnitud física; por ejemplo, se define como longitud aquello que se mide en el proceso descrito como "medición de longitudes". Existen muchos procesos de medición que definen una misma magnitud; por ejemplo, para medir una longitud existen muchos procedimientos. Dependiendo de la propiedad del objeto que se desea medir, del conocimiento disponible, de los requisitos o exigencias de precisión, de la habilidad del observador, etc., se seleccionará determinada técnica de medición, ya que una cosa es medir distancias accesibles, otras distancias interatómicas o interplanetarias. Aunque en los tres casos se supone el mismo concepto de distancia, los procedimientos para medir sus valores numéricos son muy diferentes; en el caso de los cuerpos que se pueden manejar directamente, la medida de una de sus propiedades se puede leer en la escala de un instrumento, mientras que en el caso de objetos prácticamente inaccesibles se miden en realidad magnitudes relacionadas con ellos y la propiedad que se desea conocer se investiga con la ayuda de fórmulas. De acuerdo con lo anterior es posible establecer que las mediciones pueden ser directas o indirectas. Una medición directa se realiza comparando la magnitud que interesa medir con una "patrón" o con las unidades de una escala material, y contando el número de veces que la unidad está contenida en la magnitud. Por ejemplo, para medir la longitud del margen en un cuaderno se realiza una medición con el empleo de una regla. Una medición indirecta es la que supone medición directa (de algo que no es lo que se mide) y cómputo. Un ejemplo muy sencillo es la determinación del volumen de una esfera a partir de la medición directa de su diámetro y el empleo de la fórmula Algunas cosas se pueden medir tanto por métodos indirectos como por métodos directos. Por ejemplo, se puede obtener el valor del perímetro de un cuadrado mediante una medición directa, pero también se puede obtener dicho valor midiendo un solo lado y sustituyendo dicho valor en la ecuación P = 4L, donde P es la medida del perímetro y L la del lado. El resultado de un proceso de medición es un número real, que es la medida o valor de la magnitud de que se trata. Se le interpreta como el número de veces que la unidad está contenida en dicha magnitud. El valor de una magnitud dada es independiente del proceso particular de medición, dependiendo sólo de la unidad que se elija. Como esta unidad en principio es arbitraria y se fija por convención, es necesario añadir un símbolo al valor numérico de una magnitud dada, para indicar cual unidad se ha utilizado como comparación. Por ejemplo, decir que una longitud es

18
4.5 no tiene sentido físico si no se indica la unidad de referencia. Si se utiliza el metro como unidad, la medida debe escribirse 4.5 m, pero si se emplea el centímetro como unidad, el resultado debe escribirse 450 cm, o sea que el valor numérico de una misma magnitud cambia dependiendo de la unidad seleccionada. Por ello, antes de efectuar una medición hay que seleccionar la unidad para la magnitud por medir. Debido a que la elección de unidades es convencional, para el caso de las cantidades fundamentales y para que los investigadores de diferentes países pudieran comparar los resultados de sus experimentos, fue necesario adoptar a nivel mundial un sistema de unidades básico llamado Sistema Internacional de Unidades y que se designa con el símbolo SI, tal como se definió anteriormente. 1.6 Análisis de errores La física se fundamenta en la determinación cuantitativa de las magnitudes pertinentes de los fenómenos que estudia, medir implica comparar con una unidad patrón. Las medidas en ocasiones no permiten obtener el verdadero valor de las magnitudes que se miden. En algunos aparatos se presentan imperfecciones y en otras nuestros sentidos cometen equivocaciones. Se tiene que muchas medidas son inciertas o tienen un cierto grado de incertidumbre. Al expresar el resultado de una medida pueden especificarse tres elementos: número, unidad e incertidumbre. Se distinguen dos tipos de errores: errores sistemáticos y accidentales.
1. Errores sistemáticos. Surgen al emplear un método inadecuado, un instrumento defectuoso o por usarlo en condiciones imprevistas para su uso. Al no realizarse las lecturas correctamente o bien al no tener un rango de precisión adecuado el instrumento de medición.
2. Errores accidentales. Son incertidumbres debidas a numerosas causas incontrolables e imprevistas que dan lugar a resultados distintos cuando se repite la medida.
El error obtenido en una medición puede expresarse en dos formas:
Error absoluto: es la diferencia del valor obtenido en la medición menos el valor promedio de las mediciones.
Error relativo: se obtiene dividiendo el error absoluto entre el valor promedio de las mediciones. Mediante éste se puede saber la calidad de la medición.
El promedio de los errores con respecto al promedio de las medidas se representa por la desviación media. Utilizaremos las siguientes fórmulas: 1. Valor promedio: 2. Error absoluto: 3. Desviación media:
4. Error relativo:

19
5. Error porcentual: Ejemplo: Los seis integrantes de un equipo de trabajo miden individualmente la longitud del laboratorio escolar y obtienen los siguientes datos: 10.57 m, 10.58 m, 10.54 m, 10.53 m, 10.59 m, 10.57 m. Calcular: a) El valor promedio de las mediciones, b) El error absoluto o desviación absoluta de cada medición, c) La desviación media o incertidumbre absoluta del valor promedio, d) El error relativo de cada medición, e) El error porcentual de cada medición. Solución:
De donde concluimos que la longitud del laboratorio escolar se reportaría como:
d) Error relativo de las mediciones
Vamos determínalo!!!
20
1.4 EJERCICIOS
1. Define los siguientes términos: a. Magnitud b. Patrón c. Mensurando
2. ¿Cuál es la diferencia entre precisión y exactitud? 3. ¿Cuáles son los sistemas que intervienen en el proceso de medición? 4. ¿Qué es una medición directa? 5. Da un ejemplo de medición indirecta. 6. Para cada enunciado escribe en el paréntesis una V si es correcto y una F si es falso,
a. ( ) La medición es una magnitud fundamental. b. ( ) El múltiplo de una unidad es una unidad de medida menor que la unidad dada. c. ( ) El valor de una magnitud es una expresión que se forma de un número y una
unidad. d. ( ) La metrología es el campo de conocimientos relativos a las mediciones. e. ( ) El newton es una unidad fundamental. f. ( ) La exactitud se utiliza para señalar la proximidad al valor real. g. ( ) La legibilidad se emplea para señalar la diferencia entre resultados. h. ( ) Una variable es una magnitud física que puede sufrir cambios.
7. ¿Qué es materia? 8. ¿Que son cuerpos materiales? 9. ¿Que son sistemas materiales? 10. Pon ejemplos de cosas que no se puedan definir como materia. 11. ¿A que llamamos propiedades de la materia? 12. ¿A que llamamos propiedades intensivas y pon algún ejemplo. 13. ¿A que llamamos propiedades extensivas y pon algún ejemplo. 14. ¿Que entendemos por medir? 15. ¿Cómo se llaman las propiedades de la materia que si pueden ser medidas? 16. ¿Cómo se llaman las propiedades de la materia que no pueden ser medidas? 17. ¿A qué denominamos magnitud? 18. Cita tres propiedades de la materia que sean magnitudes y tres que no lo sean. 19. ¿A qué llamamos sistema de unidades? 20. ¿A que llamamos sensibilidad de un aparato?
Ejercicios propuestos: 1) Al medir el tiempo de caída de un objeto desde una azotea se obtuvieron los siguientes
resultados: 7.25 s, 7.35 s, 7.16 s, 7.02 s y 7.4 s. Obtenga el error absoluto y el error relativo. Expresar el error relativo en forma porcentual, expresar la desviación media. Un cierto reloj de péndulo se adelanta 1 min/día. Después de poner el reloj en la hora correcta, ¿cuánto tiempo debemos esperar hasta que indique nuevamente la hora correcta?
21
2) La Antártida tiene una forma casi semicircular con un radio de 2000 km. El espesor promedio de la capa de hielo es de 3000 m. ¿Cuántos centímetros cúbicos de hielo contiene la Antártida?
3) La Tierra es aproximadamente una esfera de radio de 6.37 x 106 m. ¿Cuál es su circunferencia en kilómetros? ¿Cuál es su área superficial en kilómetros cuadrados? ¿Cuál es su volumen en kilómetros cúbicos?
4) A continuación se dan las velocidades máximas aproximadas de varios animales, pero en unidades de velocidad diferentes. Convierta estos datos a m/s, y después disponga a los animales en orden creciente de su velocidad máxima: la ardilla, 19 km/h; el conejo, 30 nudos; el caracol, 0.030 mi/h; la araña, 1.8 pies/s; el leopardo 1.9 km/min; un ser humano, 1000 cm/s; el zorro, 1100 m/min; el león, 1900 km/día.
5) Las distancias astronómicas son tan grandes comparadas con las terrestres que se emplean unidades de longitud mucho mayores para facilitar la comprensión de las distancias relativas de los objetos astronómicos. Una unidad astronómica (UA) es igual a la distancia promedio de la Tierra al Sol, 1.50 x 108 km. Un pársec (pc) es la distancia a la cual 1 UA subtendería un ángulo de 1 segundo de arco. Un año-luz (al) es la distancia que la luz cubriría en un año viajando a través del vacío a una velocidad de 3.00 x 108 m/s.
a. Exprese la distancia de la Tierra al Sol en pársec y en años-luz. b. Exprese un año-luz en parsec y kilómetros.
6) Una molécula de agua (H2O) contiene dos átomos de Hidrógeno y uno de Oxígeno. Un átomo de hidrógeno tiene una masa de 1.0 u y un átomo de oxígeno tiene una masa de 16.0 u.
a. ¿Cuál es la masa en kilogramos de una molécula de agua? b. ¿Cuántas moléculas de agua hay en los océanos del mundo? Los océanos tienen una
masa total de 1.4 x 1021 kg. 7) La distancia entre átomos vecinos, o entre moléculas, de una sustancia sólida puede ser
estimada calculando el doble del radio de una esfera con un volumen igual al volumen del átomo del material. Calcule la distancia entre ‘átomos vecinos de Hierro (Fe) y Sodio (Na). Las densidades de Fe y Na son 7870 kg/m3 y 1013 kg/m3, respectivamente; la masa de un átomo de Fe es de 9.27 x 10-26 kg, y la de un átomo de Na es 3.82 x 10-26 kg.
8) En el periodo 1960-1983, se definió que el metro tenía 1650763.73 longitudes de onda de una cierta luz anaranjada emitida por átomos del gas Kr. Calcule la distancia en nanómetros que corresponde a una longitud de onda. Exprese el resultado usando el número apropiado de cifras significativas.
9) Evalúe (37.76 + 0.132) y (16.264 – 16.26325) con el número correcto de cifras significativas. 10) Una placa rectangular de metal tiene una longitud de 8.43 cm y un ancho de 5.12 cm. Calcule
el área de la placa con el número correcto de cifras significativas. 11) Una placa circular de metal tiene un radio de 3.7 cm. Calcule su área. Tenga en cuenta el
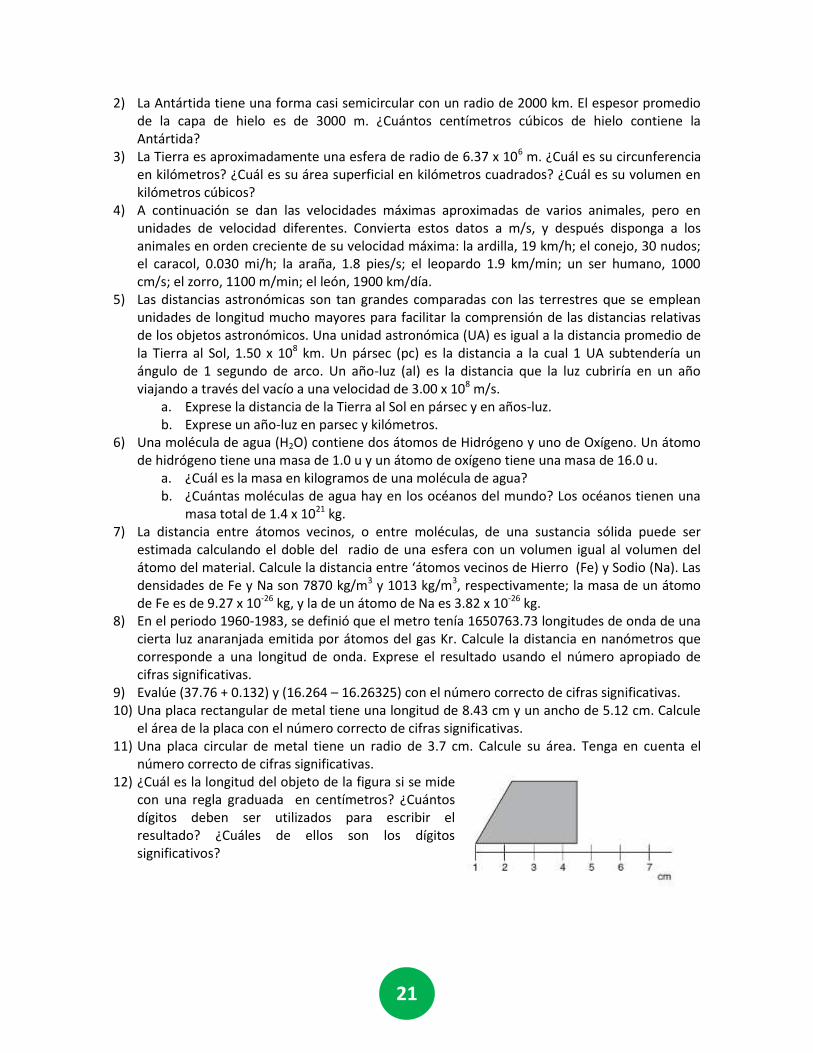
número correcto de cifras significativas. 12) ¿Cuál es la longitud del objeto de la figura si se mide
con una regla graduada en centímetros? ¿Cuántos dígitos deben ser utilizados para escribir el resultado? ¿Cuáles de ellos son los dígitos significativos?

22
1.7 Escalares y Vectores En Física y en otras ciencias se le llama magnitud a todo aquello que puede ser medido de alguna manera. Hay algunas de esas magnitudes que al determinarlas se especifican por completo mediante un solo número con sus respectivas unidades de medida y reciben el nombre de magnitud escalares. Son ejemplos de esas magnitudes: el tiempo, la masa, el volumen, la densidad, la temperatura y muchas otras ¿puedes tú enumerar otras magnitudes escalares? Hay otras magnitudes para las que es necesario definir algunas propiedades adicionales como la dirección y el sentido en el que actúan, a este tipo de magnitudes se les llama magnitudes vectoriales o simplemente vectores. Son ejemplos de este tipo de magnitudes: la fuerza, la velocidad, la aceleración, etc. Las operaciones matemáticas entre escalares son las mismas que las del algebra ordinaria, sin embargo para los vectores es necesario definir operaciones matemáticas especiales para operar con ellos y extender un poco el alcance de las matemáticas que tú conoces. También es necesario introducir una forma especial de representar a los vectores. 1.7.1 Operaciones con vectores: Suma y Resta. Método gráfico y Componentes Rectangulares Hemos dicho que un vector es una magnitud física que además de tener un tamaño expresado con sus respectivas unidades, tiene además dirección y sentido. En forma gráfica se representa por un segmento de línea dirigido o flecha como el mostrado en la figura siguiente, la longitud del segmento medido y expresado en una escala apropiada representa el tamaño del vector, la orientación del segmento indica su dirección y la punta de la flecha o segmento indica su sentido. Para designar un vector se suele utilizar una letra mayúscula con una flechita colocada encima o
una letra mayúscula resaltada en doble o en negritas y a veces una letra minúscula. Así, ,A y son distintas formas de denominar un vector cuyo nombre es A. Ejemplos:
= 35 m/s hacia el norte, = 50 millas al Norte, = 15 km Suroeste, etc. Definición de línea de acción de un vector: Es la recta a la que pertenece el vector, Ejemplo:
Vectores paralelos: Son aquellos que tienen sus líneas de acción paralelas. Ejemplo:
||
Vectores iguales Son aquellos vectores que tienen la misma magnitud, dirección y sentido aunque no tengan el mismo punto de aplicación.

23
Ejemplo:
Opuesto de un vector: Se define como aquel que tiene la misma magnitud del vector y está a 180° respecto al vector y se representa como el negativo del vector, por lo cual se les llaman vectores iguales y opuestos.
1.7.2 Suma y Resta de Vectores La adición y sustracción puede ser realizada por medio de métodos gráficos (regla del paralelogramo, regla del polígono), por métodos analíticos (ley del coseno y ley de los senos) y por medio de componentes rectangulares. Regla del paralelogramo.
Dos vectores A y B al ser sumados dan
como resultado otro vector C A B . Gráficamente, por medio de la regla del paralelogramo, se colocan los dos vectores de manera que sus orígenes coincidan, el resultado de la suma es la diagonal del
paralelogramo que contiene como lados a los vectores A y . Resta de vectores por el método del paralelogramo.
Nota importante:
Para restar un vector de un vector , primero se obtiene el opuesto del vector (un vector
en la misma dirección pero sentido contrario, simbolizado por ) para luego realizar la suma de
con .
B
B A B
B
A B

24
La suma de vectores en forma gráfica, aunque muy ilustrativa resulta impráctica para efectos de cálculo. No obstante permite introducir el concepto de componentes rectangulares, al suponerse que todo vector es el resultado de la suma de otros vectores dirigidos a lo largo de los ejes x y y del plano cartesiano (caso de dos dimensiones).
Un vector, digamos , como el de la siguiente figura, puede pensarse que es el resultado de sumar
un vector a lo largo del eje x, ( ) y otro vector a lo largo del eje y ( ). Las magnitudes de y
que representaremos como Rx y Ry respectivamente, reciben el nombre de componentes
rectangulares del vector .
Podemos ahora recordar el Teorema de Pitágoras y aplicarlo al triángulo formado por el vector y
sus componentes, podemos determinar el tamaño o magnitud del vector , representada únicamente por la letra R de la siguiente manera:
o √
1.7.3 Vector unitario Es un vector cuyo tamaño o magnitud vale 1. Ojo: cuando lo determinemos debemos tener cuidado que en el cálculo cada una de las componentes del vector esté en el mismo sistema de unidades. 1.7.3.1 Vector Unitario en la dirección de otro vector Se obtiene al dividir dicho vector por su magnitud.
Podemos por lo tanto definir un vector unitario a lo largo del eje x dividiendo por su magnitud
Rx y un vector unitario a lo largo del eje y, dividiendo por su magnitud. Vamos a representar
estos vectores unitarios por los símbolos .
Así:
podemos reordenar esta ecuación de tal forma que y ahora nuestro vector
inicial , lo podemos expresar en términos de sus componentes rectangulares de la siguiente forma.

25
Si el vector tiene componentes x, y, yz también puede definirse un vector en la dirección z, el cual
lo representaríamos por el símbolo . Trabajaremos con vectores en dos dimensiones únicamente y como referencia de convenio de signos en el plano cartesiano consideraremos las direcciones para las coordenadas x y y el siguiente.
Veamos un ejemplo:
1. Dado el vector , determine:
a) La representación gráfica de dicho vector en el plano cartesiano. b) El tamaño o magnitud de dicho vector c) El ángulo que forma dicho vector respecto al eje x.
d) Un vector unitario en la dirección del vector . e) Dibujamos en el plano cartesiano, con una escala apropiada, por ejemplo 1 división =
1Newton y trazamos en el eje de las x un segmento equivalente a 3 divisiones que equivalen a 3 N y otro segmento en el eje de las y de 4 divisiones, que equivalen a 4 Newtons.
a) Para encontrar un vector unitario en la dirección del vector ,
dividimos dicho vector por su magnitud, que como ya encontramos en el literal b) es 5Newtons. Así nuestro vector unitario es
Debes notar que el resultado es adimensional y que en el cálculo de dicho vector, tanto las componentes del vector como su magnitud deben tener las mismas unidades para que puedan simplificarse.

26
Apliquemos ahora el teorema de Pitágoras y verifiquemos que la magnitud de es 1.
√(
)
(
)
√
√
√
a) El ángulo que forma el vector con el eje x, se muestra en la figura. Para un triángulo rectángulo,
la tangente de un ángulo se define como la relación del lado opuesto al ángulo dividido por el lado adyacente o próximo al ángulo. En este caso
Por lo que con la ayuda de una calculadora científica ( ) . Sugerencia Metodológica: para la representación del vector en el plano cartesiano, puedes ubicar el punto (3,4) y el vector será la flecha que va desde el origen del plano cartesiano hasta dicho punto. 1.7.4 Suma de vectores por componentes rectangulares
Si los vectores están expresados en sus componentes rectangulares, tales como ˆ ˆ
x yA A i A j y
ˆ ˆx yB B i B j
entonces el vector resultante C de la suma tiene como componente en x a la
suma de las componentes en x de los vectores sumados, y como componentes en y la suma de las componentes en y de los vectores sumados. En forma algebraica:
ˆ ˆx x y yC A B i A B j
Veamos un ejemplo:
2. Dado los vectores , efectuar
a)
b) Solución a):
[ ( ) [ ]]
Solución b): [ ( )] [ ]
[ ] [ ]

27
Queda como ejercicio paras el lector, representar estos vectores en el plano cartesiano, calcular su magnitud y su dirección (el ángulo que forman respecto al eje de las x positivo).
Ejercicios: 1. Calcular la resultante (vector -suma- en función de las componentes y vectores Unitarios
correspondientes) del sistema formado por los vectores A(3,-2); B(1,1,) y C(2,2,).
2. Se muestran los vectores A y B. ¿Cuál es la magnitud de un vector C si C = A-B? a. 46 b. 10 c. 30 d. 78 e. 90
3. A partir de un oasis, un camello camina 25 km en Dirección 30° (sur oeste y luego caminar 30 kilómetros hacia el norte a un segundo oasis. ¿Qué distancia separa a los dos oasis? a. 15 km
b. 48 km c. 28 km d. 53 km
e. 55 km
4. Un empleado postal conduce su camión por la ruta de la figura. Determine la magnitud y la dirección del desplazamiento resultante. Dibuja un diagrama a escala.
1.8 Cinemática en una dimensión. MRU y MRUV
La cinemática es la parte de la mecánica que permite conocer la posición, velocidad y aceleración que tiene un cuerpo que está en movimiento, sin considerar la causa que provoca el movimiento, y estudia características como: trayectoria, desplazamiento, velocidad y aceleración. La rapidez es un valor escalar del desplazamiento recorrido por unidad de tiempo. Mientras que la velocidad es una cantidad vectorial que incluye magnitud, dirección y sentido. Se considera que la velocidad instantánea es un cambio de posición cuando el incremento de tiempo es muy pequeño. La trayectoria, es el conjunto de puntos por los cuales pasa un móvil al desplazarse. Si los móviles dejasen rastro por donde van pasando, la trayectoria sería la línea que describirían. Existen trayectorias muy sencillas (rectilínea o circular), pero las hay más complejas (parabólicas, elípticas, hiperbólicas), o extremadamente complejas entre las curvilíneas (vuelo de una mosca, movimiento de la mano de un saltador de trampolín). El desplazamiento es un vector y no debe confundirse con el concepto de distancia recorrida.
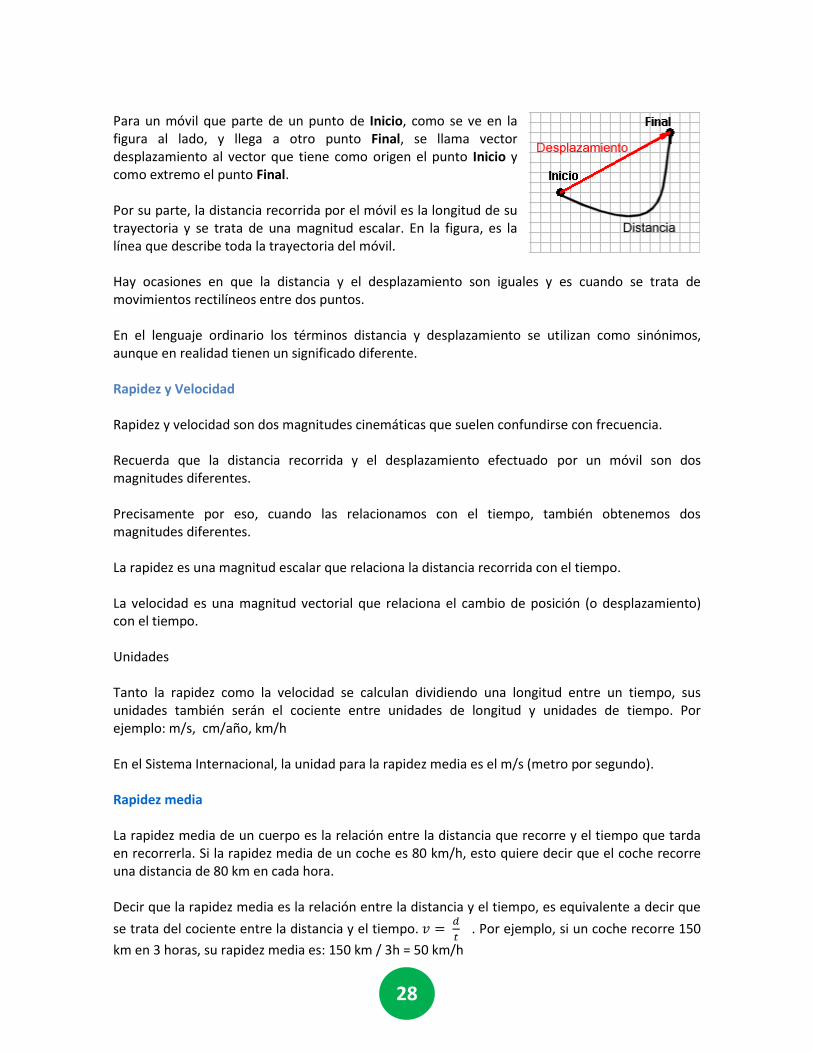
28
Para un móvil que parte de un punto de Inicio, como se ve en la figura al lado, y llega a otro punto Final, se llama vector desplazamiento al vector que tiene como origen el punto Inicio y como extremo el punto Final. Por su parte, la distancia recorrida por el móvil es la longitud de su trayectoria y se trata de una magnitud escalar. En la figura, es la línea que describe toda la trayectoria del móvil. Hay ocasiones en que la distancia y el desplazamiento son iguales y es cuando se trata de movimientos rectilíneos entre dos puntos. En el lenguaje ordinario los términos distancia y desplazamiento se utilizan como sinónimos, aunque en realidad tienen un significado diferente. Rapidez y Velocidad Rapidez y velocidad son dos magnitudes cinemáticas que suelen confundirse con frecuencia. Recuerda que la distancia recorrida y el desplazamiento efectuado por un móvil son dos magnitudes diferentes. Precisamente por eso, cuando las relacionamos con el tiempo, también obtenemos dos magnitudes diferentes. La rapidez es una magnitud escalar que relaciona la distancia recorrida con el tiempo. La velocidad es una magnitud vectorial que relaciona el cambio de posición (o desplazamiento) con el tiempo. Unidades Tanto la rapidez como la velocidad se calculan dividiendo una longitud entre un tiempo, sus unidades también serán el cociente entre unidades de longitud y unidades de tiempo. Por ejemplo: m/s, cm/año, km/h En el Sistema Internacional, la unidad para la rapidez media es el m/s (metro por segundo). Rapidez media La rapidez media de un cuerpo es la relación entre la distancia que recorre y el tiempo que tarda en recorrerla. Si la rapidez media de un coche es 80 km/h, esto quiere decir que el coche recorre una distancia de 80 km en cada hora. Decir que la rapidez media es la relación entre la distancia y el tiempo, es equivalente a decir que
se trata del cociente entre la distancia y el tiempo.
. Por ejemplo, si un coche recorre 150
km en 3 horas, su rapidez media es: 150 km / 3h = 50 km/h
29
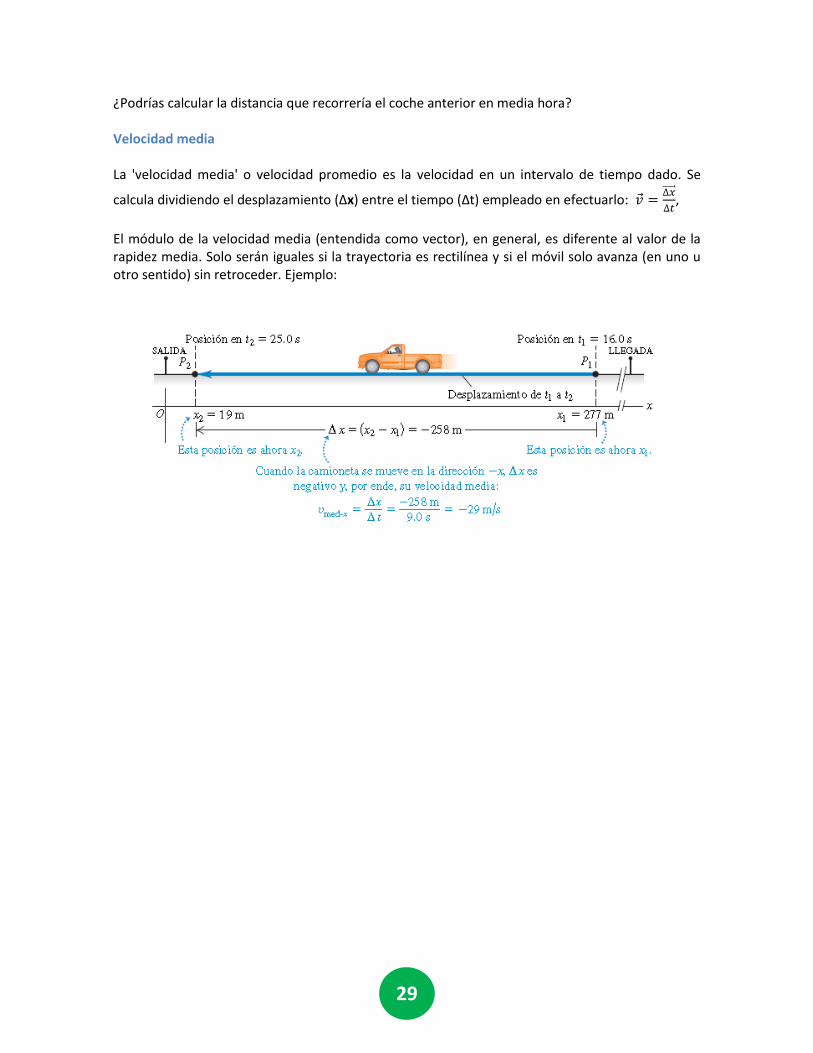
¿Podrías calcular la distancia que recorrería el coche anterior en media hora? Velocidad media La 'velocidad media' o velocidad promedio es la velocidad en un intervalo de tiempo dado. Se
calcula dividiendo el desplazamiento (Δx) entre el tiempo (Δt) empleado en efectuarlo:
,
El módulo de la velocidad media (entendida como vector), en general, es diferente al valor de la rapidez media. Solo serán iguales si la trayectoria es rectilínea y si el móvil solo avanza (en uno u otro sentido) sin retroceder. Ejemplo:
30
UNIDAD II
Leyes de Newton
y sus aplicaciones para la vida La mecánica es la rama de la física que estudia el efecto de las fuerzas en el movimiento de cuerpos. Nuestros actuales conceptos de la mecánica se deben a Isaac Newton, cuyo trabajo importante sobre la mecánica, Principia Mathematica, fue publicado en 1687. Los griegos, que estaban interesados en la ciencia y atletismo, también fueron los primeros en aplicar los principios físicos a los movimientos de animales. Aristóteles escribió, "el animal que se mueve, hace su cambio de posición presionando contra eso que está debajo de él.... Los corredores para correr más rápido balancean los brazos y los extienden y hay una especie de apoyo sobre las manos y la muñecas." 2.1 El concepto de fuerza El concepto de fuerza está asociada con un empujón (compresión) o un tirón (tensión o tracción). Las fuerzas pueden producir movimiento, detener el movimiento o modificar el movimiento de cuerpos en los que actúan. Las fuerzas también pueden deformar el cuerpo sobre el que actúan. Un empuje sobre un objeto (por ejemplo, un juguete) utiliza un esfuerzo muscular para producir un movimiento que tiene el sentido de este empuje. Un tirón en el juguete en la dirección opuesta invertirá el movimiento. Una fuerza puede ser representada por un vector. La longitud del vector, representado por una flecha, da la magnitud de la fuerza, y su punta indica la dirección. La Fuerza se mide en newton (N) en el sistema internacional de unidades (SI). Recuerda que la magnitud y dirección caracterizan una cantidad vectorial.

31
Las fuerzas en la figura siguiente se llaman fuerzas de contacto, puesto que estas fuerzas se producen con dos cuerpos en contacto. Las fuerzas ejercidas por los gases en las paredes de un recipiente, o nuestros pies en el suelo, son ejemplos de fuerzas de contacto.
Ilustración 1 (un) una pequeña fuerza horizontal empuja un objeto hacia la derecha. (b) una fuerza más grande tira un objeto en un ángulo de 45° con la horizontal a la derecha. Ambas fuerzas se aplican, por ejemplo, por la mano de una persona.
2.2.1 Diagramas de fuerzas Los Vectores se caracterizan por la magnitud y dirección y pueden ser representados gráficamente
o matemáticamente. La fuerza es un ejemplo de una cantidad del vector, y se indica por o por la letra en negrita F. Un diagrama de fuerzas es un modelo simplificado para representar el efecto de las fuerzas que actúan sobre uno o varios cuerpos prescindiendo de los mismos.
Ilustración 3. En la figura se muestra el pié de una persona sometido a tensión por la acción de las cuerdas y el objeto colgado a través de poleas. También se muestra modelo simplificado de fuerzas en la polea sujeta al pié, ahora representado solo por un punto.
Ilustración 2. Dos ejemplos de fuerzas que actúan a distancia. Un imán atrae una pieza de hierro, y un masa M grande y una pequeña masa m experimentan una fuerza de atracción gravitacional, de una manera diferente en comparación con las fuerzas de contacto que se muestra en la ilustración anterior.
32
2.3 Leyes de Newton 2.3.1 Primera Ley de Newton Un cuerpo mantendrá su estado de movimiento, permanece en reposo o en movimiento uniforme a menos que experimente una fuerza externa neta, es decir, una fuerza resultante. Esta ley implica dos situaciones de equilibrio, uno del equilibrio estático y otro de equilibrio dinámico. En términos más sencillos, podemos decir que cuando un cuerpo está en equilibrio estático, la fuerza neta aplicada es cero. Esta es La primera ley de Newton del movimiento (ley de la inercia). 2.3.2 Segunda ley de Newton (Masa y Aceleración) La acción de una fuerza resultante diferente a cero sobre un cuerpo produce cambio en la velocidad del vector, es decir, produce una aceleración a. Esta aceleración es proporcional a la intensidad de una fuerza neta F e inversamente proporcional a la masa m del cuerpo, es decir,
a= F/m Entonces, podemos escribir eso F = m a. La unidad de velocidad en SI es m/s siendo la aceleración
es decir, la tasa de cambio de velocidad Δv con el tiempo Δt, en el SI su unidad es m/s2. Por lo tanto, la unidad de fuerza es kg m/s2, que recibe el nombre especial de newton, N, en honor al padre de la mecánica clásica, Isaac Newton (1642-1727). 2.3.3 Tercera ley de Newton La fuerza es una consecuencia de la interacción entre dos cuerpos. La tercera ley dice que para cada fuerza de acción corresponde una fuerza de reacción de igual intensidad pero en dirección opuesta. Acción y reacción actúan sobre cuerpos diferentes. 1.3.4 Algunas Fuerzas específicas 1.3.4.1 Peso El peso de un cuerpo o de cualquier objeto es la fuerza con la cual un cuerpo es atraído por la tierra. Esto explica el hecho de que un objeto siempre cae cuando se libera a una cierta altura desde el suelo. Esta fuerza, denominada también fuerza gravitatoria, o simplemente peso, es ejercida por la tierra en cuerpos no necesariamente en contacto. F(N) =W(N) = mg m es la masa del cuerpo, medido en kilogramos (kg), y g es la aceleración de la gravedad, igual a 9.8 m/s2, en cualquier lugar cerca de la superficie de la tierra. El peso del cuerpo humano en la luna es aproximadamente 1/6 que en la tierra, aunque la masa es la misma, debido al bajo valor de la aceleración de la gravedad en la luna, 1,6 m/s2. Los

33
astronautas que pisan la luna se sienten más ligeros, liberándose parte del peso de sus cuerpos y mientras caminan lo hacen como si ellos están saltando. Si su masa total, incluyendo lo que llevaban puesto, fue de 100 kg, su peso en la tierra sería unos 1.000 N, mientras que en la luna, que se reduciría a 160 N. La reacción al peso W (acción), ejercida por la tierra en un cuerpo, es la fuerza que el cuerpo ejerce sobre la tierra (fuerza de reacción R) y actúa hacia el centro de la tierra. Su magnitud es la misma que el peso y en la dirección opuesta. 1.3.4.2 Fuerza muscular El movimiento y la postura animal son controlados por las fuerzas producidas por los músculos. Hay aproximadamente 600 músculos en el cuerpo humano que son responsables de todos los movimientos del cuerpo muy sutiles en la expresión facial para mover la lengua en un discurso, al producir la circulación de la sangre en los vasos del cuerpo, y a los latidos del corazón, cuya función principal es la contracción muscular. Un músculo se compone de un gran número de fibras cuyas células son capaces de contraerse al ser estimulados por impulsos nerviosos desde el cerebro. Un músculo se une generalmente a dos diferentes huesos mediante tendones. La fuerza máxima que puede ejercer un músculo depende de su área transversal (corte perpendicular) y es inherente a la estructura de los filamentos musculares. Esta fuerza máxima por unidad de superficie varía entre 30 y 40 N/cm2. No depende del tamaño del animal y, por tanto, tiene el mismo valor para un músculo de una rata o un elefante. Bajo el microscopio, el músculo de un elefante es muy similar a la de una rata, excepto en la cantidad de mitocondrias, que es mayor en los animales más pequeños. Representación del músculo bíceps inmóvil (en reposo), los huesos del brazo y antebrazo con un objeto en la mano puede verse en la figura. Encontrar la magnitud de la fuerza ejercida por el músculo bíceps, agregando todas las fuerzas, observando que, una vez que el sistema está en equilibrio, el resultante debe ser igual a cero. La magnitud del peso W del objeto es 20 N más la de la mano y del antebrazo es que es 15 N. La magnitud de la fuerza R que es la reacción del húmero contra el cúbito es 20 N.
Ilustración 4. Fuerza de atracción gravitatoria sobre un objeto en la superficie de la tierra. La línea de acción de la fuerza es hacia el centro de la tierra.
Ilustración 5. Fuerza hecha por músculos del brazo humano. Abajo diagrama de fuerzas simplificado.
34
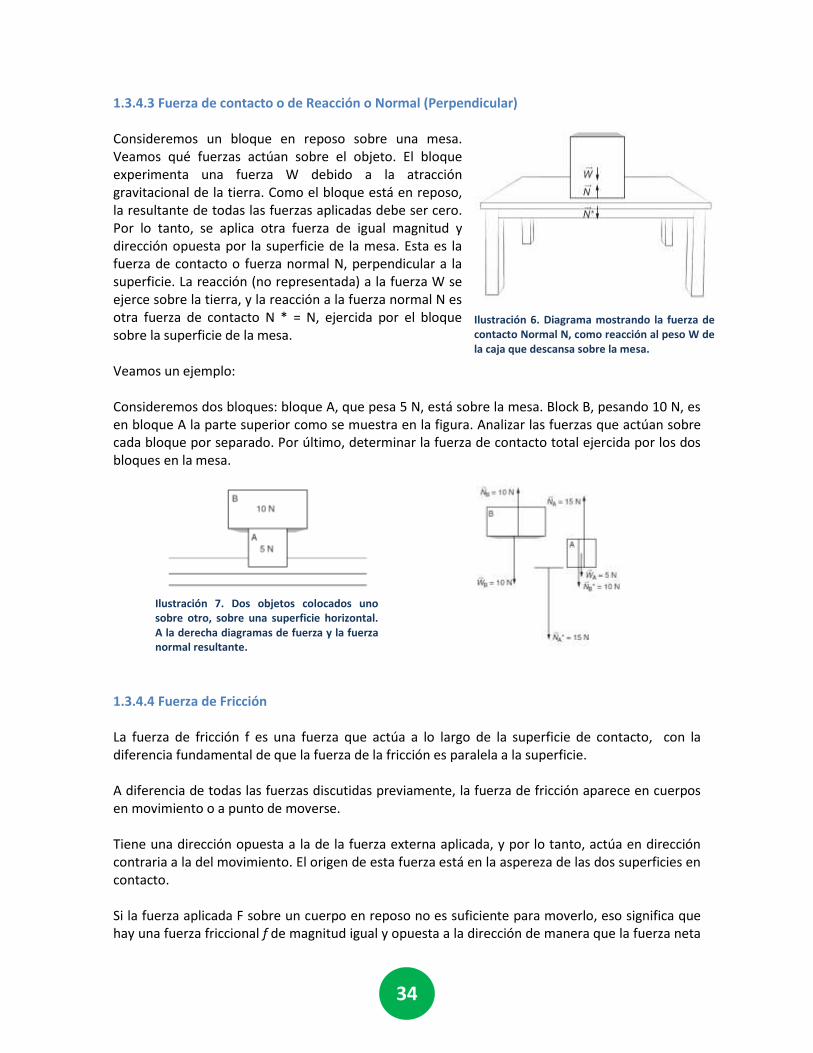
1.3.4.3 Fuerza de contacto o de Reacción o Normal (Perpendicular) Consideremos un bloque en reposo sobre una mesa. Veamos qué fuerzas actúan sobre el objeto. El bloque experimenta una fuerza W debido a la atracción gravitacional de la tierra. Como el bloque está en reposo, la resultante de todas las fuerzas aplicadas debe ser cero. Por lo tanto, se aplica otra fuerza de igual magnitud y dirección opuesta por la superficie de la mesa. Esta es la fuerza de contacto o fuerza normal N, perpendicular a la superficie. La reacción (no representada) a la fuerza W se ejerce sobre la tierra, y la reacción a la fuerza normal N es otra fuerza de contacto N * = N, ejercida por el bloque sobre la superficie de la mesa. Veamos un ejemplo: Consideremos dos bloques: bloque A, que pesa 5 N, está sobre la mesa. Block B, pesando 10 N, es en bloque A la parte superior como se muestra en la figura. Analizar las fuerzas que actúan sobre cada bloque por separado. Por último, determinar la fuerza de contacto total ejercida por los dos bloques en la mesa.
1.3.4.4 Fuerza de Fricción La fuerza de fricción f es una fuerza que actúa a lo largo de la superficie de contacto, con la diferencia fundamental de que la fuerza de la fricción es paralela a la superficie. A diferencia de todas las fuerzas discutidas previamente, la fuerza de fricción aparece en cuerpos en movimiento o a punto de moverse. Tiene una dirección opuesta a la de la fuerza externa aplicada, y por lo tanto, actúa en dirección contraria a la del movimiento. El origen de esta fuerza está en la aspereza de las dos superficies en contacto. Si la fuerza aplicada F sobre un cuerpo en reposo no es suficiente para moverlo, eso significa que hay una fuerza friccional f de magnitud igual y opuesta a la dirección de manera que la fuerza neta
Ilustración 6. Diagrama mostrando la fuerza de contacto Normal N, como reacción al peso W de la caja que descansa sobre la mesa.
Ilustración 7. Dos objetos colocados uno sobre otro, sobre una superficie horizontal. A la derecha diagramas de fuerza y la fuerza normal resultante.
35
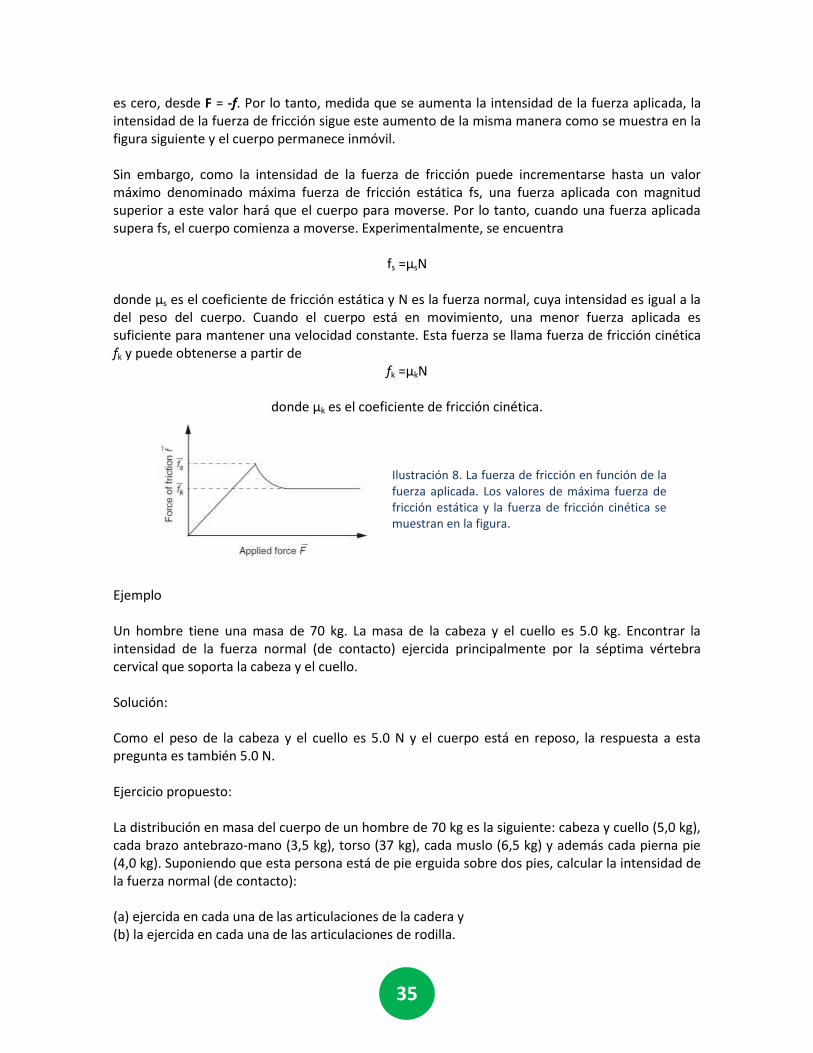
es cero, desde F = -f. Por lo tanto, medida que se aumenta la intensidad de la fuerza aplicada, la intensidad de la fuerza de fricción sigue este aumento de la misma manera como se muestra en la figura siguiente y el cuerpo permanece inmóvil. Sin embargo, como la intensidad de la fuerza de fricción puede incrementarse hasta un valor máximo denominado máxima fuerza de fricción estática fs, una fuerza aplicada con magnitud superior a este valor hará que el cuerpo para moverse. Por lo tanto, cuando una fuerza aplicada supera fs, el cuerpo comienza a moverse. Experimentalmente, se encuentra
fs =μsN
donde μs es el coeficiente de fricción estática y N es la fuerza normal, cuya intensidad es igual a la del peso del cuerpo. Cuando el cuerpo está en movimiento, una menor fuerza aplicada es suficiente para mantener una velocidad constante. Esta fuerza se llama fuerza de fricción cinética fk y puede obtenerse a partir de
fk =μkN
donde μk es el coeficiente de fricción cinética.
Ejemplo Un hombre tiene una masa de 70 kg. La masa de la cabeza y el cuello es 5.0 kg. Encontrar la intensidad de la fuerza normal (de contacto) ejercida principalmente por la séptima vértebra cervical que soporta la cabeza y el cuello. Solución: Como el peso de la cabeza y el cuello es 5.0 N y el cuerpo está en reposo, la respuesta a esta pregunta es también 5.0 N. Ejercicio propuesto: La distribución en masa del cuerpo de un hombre de 70 kg es la siguiente: cabeza y cuello (5,0 kg), cada brazo antebrazo-mano (3,5 kg), torso (37 kg), cada muslo (6,5 kg) y además cada pierna pie (4,0 kg). Suponiendo que esta persona está de pie erguida sobre dos pies, calcular la intensidad de la fuerza normal (de contacto): (a) ejercida en cada una de las articulaciones de la cadera y (b) la ejercida en cada una de las articulaciones de rodilla.
Ilustración 8. La fuerza de fricción en función de la fuerza aplicada. Los valores de máxima fuerza de fricción estática y la fuerza de fricción cinética se muestran en la figura.

36
Supongamos ahora que el hombre está parado apoyado en un solo pie, calcular la intensidad de la fuerza de contacto: (c) en la articulación de la rodilla de la pierna levantada y (d) en la articulación de la rodilla que soporta la pierna que está en el suelo. Los valores de μs y μk dependen de la naturaleza de las superficies en contacto, pero son casi independientes de las superficies en contacto. Son adimensionales, es decir, números sin unidades. En la siguiente tabla se muestran los valores de coeficientes de fricción estática y cinético entre algunos materiales.
Torques El torque o momento de fuerza, MF, es una cantidad física asociada a la tendencia de una fuerza para producir rotación alrededor de cualquier eje. Esfuerzo de torsión o torque es una cantidad vectorial, pero, lo utilizaremos como un escalar, presentando un Convenio de signos que permitirá añadir algebraicamente varios pares o momentos debido a las fuerzas aplicadas sobre un cuerpo.El signo del momento de torsión es positivo (+) si la fuerza tiende a producir rotación en sentido anti horario y negativo (-) si la fuerza tiende a producir rotación en sentido horario alrededor de un eje de rotación.
El efecto de rotación depende de la magnitud de la fuerza aplicada F y de la distancia d⊥ (perpendicular) al eje de rotación. El Esfuerzo de Torsión se calcula mediante el producto de la magnitud de la fuerza por la distancia (d⊥) perpendicular a la línea de acción de la fuerza F al eje de rotación. La línea de acción es la línea recta, imaginaria, que determina la dirección del vector de la fuerza. La distancia d⊥ se llama el brazo del momento o el brazo de palanca de la fuerza F. El segmento que define el brazo de palanca es perpendicular a la línea de acción de la fuerza y pasa por el eje de rotación.
Ilustración 9. Diagrama de fuerzas, eje de rotación y dirección de giro del torque producida por la fuerza hecha por la mano.

37
Su unidad en el sistema internacional de unidades (SI) es N m. Esfuerzo de torsión o torque debido a dos o más fuerzas no paralelas Ya hemos visto que una de las maneras de determinar el esfuerzo de torsión neto o torque neto realizado sobre un cuerpo es realizando la suma de los esfuerzos de torsión debido a cada fuerza por separado. Otro método, utilizado es encontrar primero la fuerza resultante y su punto de aplicación, o mejor, su línea de acción y el brazo de palanca correspondiente. En el estudio del esfuerzo de torsión, es claro que el punto de aplicación de una fuerza es de fundamental importancia. En realidad, si se determina la línea de acción de la fuerza, el problema está resuelto, puesto que el brazo de la fuerza o brazo de palanca, corresponde a la distancia perpendicular entre esta línea y el eje de rotación.
Ilustración 10. Aplicación de torque en un sube y baja
Veamos un ejemplo: Juan y María están jugando en un subibaja. Juan, con una masa de 20 kg, está colocado a 2 m desde el punto de pivote, llamado el fulcro. ¿A qué distancia desde el fulcro debe sentarse Mary, que tiene una masa de 30 kg, para que el sube y baja este en equilibrio horizontal? para que el sistema este en equilibrio: La suma de esfuerzos de torsión debido al peso de María y al de Juan debe ser cero, es decir,
El peso de Juan es mJg y el peso de María es mMg, el peso de maría tiende a hacer girar el subibaja en dirección contraria al movimiento de las agujas del reloj, por lo que hemos convenido que será positivo (+). El peso de Juan, por el contrario tiende a hacer girar el sube y baja en la dirección del mov. de las agujas del reloj, por lo que según nuestro convenio dicho torque será negativo. Si sumamos ambos momentos de torsión o torques respetando este convenio de signos tendremos:
Si sustituimos valores tendremos ( ) (
) ( ) ( ) (
)
38
Podemos ahora despejar la distancia , que es la distancia a la que se debe sentar María y resulta ser , que es una distancia menor que la de Juan, lo que es un resultado lógico, dado que María pesa más que Juan. Ejercicios propuestos: Se mantiene el antebrazo de la figura siguiente a 90° de la parte superior del brazo. Un objeto que pesa 15 N se sostiene en la mano. La distancia entre el objeto y el eje de rotación a través de O, situado en la articulación del codo entre el cúbito y el húmero, es de 30 cm. El músculo bíceps se une a 3,5 cm de la articulación O.
a. Calcular el torque producido por el peso del objeto. b. Calcular la fuerza hacia arriba que ejerce el músculo bíceps en el
antebrazo (formado por el cúbito y el radio). Considerar sólo estas dos fuerzas y que el antebrazo esté en equilibrio.
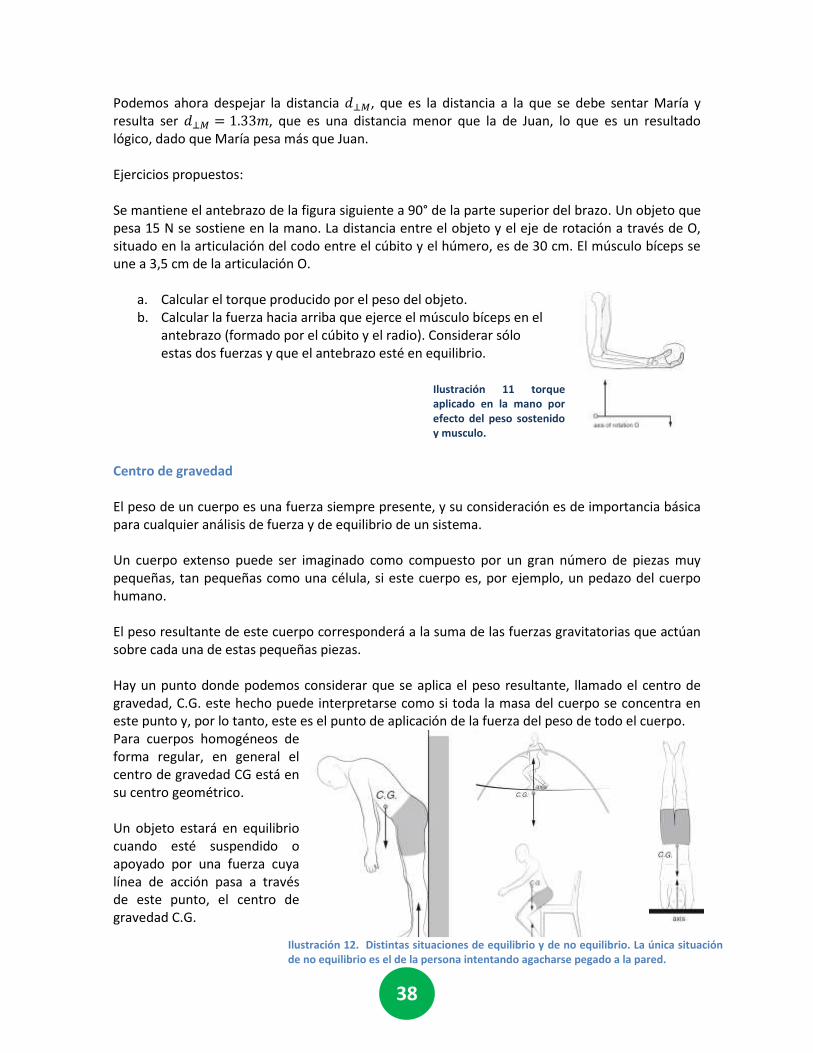
Centro de gravedad El peso de un cuerpo es una fuerza siempre presente, y su consideración es de importancia básica para cualquier análisis de fuerza y de equilibrio de un sistema. Un cuerpo extenso puede ser imaginado como compuesto por un gran número de piezas muy pequeñas, tan pequeñas como una célula, si este cuerpo es, por ejemplo, un pedazo del cuerpo humano. El peso resultante de este cuerpo corresponderá a la suma de las fuerzas gravitatorias que actúan sobre cada una de estas pequeñas piezas. Hay un punto donde podemos considerar que se aplica el peso resultante, llamado el centro de gravedad, C.G. este hecho puede interpretarse como si toda la masa del cuerpo se concentra en este punto y, por lo tanto, este es el punto de aplicación de la fuerza del peso de todo el cuerpo. Para cuerpos homogéneos de forma regular, en general el centro de gravedad CG está en su centro geométrico. Un objeto estará en equilibrio cuando esté suspendido o apoyado por una fuerza cuya línea de acción pasa a través de este punto, el centro de gravedad C.G.
Ilustración 12. Distintas situaciones de equilibrio y de no equilibrio. La única situación de no equilibrio es el de la persona intentando agacharse pegado a la pared.
Ilustración 11 torque aplicado en la mano por efecto del peso sostenido y musculo.

39
No estará en equilibrio, si el punto de apoyo y el centro de gravedad no están alineados. Método práctico para localizar el centro de gravedad Una manera sencilla de encontrar el centro de gravedad de cualquier objeto, es colgándolo de puntos extremos de su cuerpo y marcando la dirección de la vertical, desde el punto de donde cuelga. Posteriormente se cuelga de otro extremo y se marca también la dirección de la vertical. El punto donde se cruzan ambas líneas, ese es el centro de gravedad. El c.g. de un cuerpo no corresponde necesariamente a un punto material del cuerpo. Así, el c.g. de una esfera hueca está situado en el centro de la esfera que, obviamente, no pertenece al cuerpo. En física, además del centro de gravedad aparecen los conceptos de centro de masa y de centro geométrico o centroide que, aunque pueden coincidir con el centro de gravedad, son conceptualmente diferentes. El centroide es un concepto puramente geométrico que depende de la forma del sistema; el centro de masas depende de la distribución de materia, mientras que el centro de gravedad depende también del campo gravitatorio.
Centro de masa y centro de gravedad El centro de masa coincide con el centro de gravedad cuando el cuerpo está en un campo gravitatorio uniforme. Es decir, cuando el campo gravitatorio es de magnitud y dirección constante en toda la extensión del cuerpo. A los efectos prácticos esta coincidencia se cumple con precisión aceptable para casi todos los cuerpos que están sobre la superficie terrestre, incluso para una locomotora o un
gran edificio, puesto que la disminución de la intensidad gravitatoria es muy pequeña en toda la extensión de estos cuerpos. Método analítico para localizar el centro de gravedad Para sistemas en los que la masa está distribuida de manera discreta, el centro de gravedad se calcula sumando el producto de la masa de cada partícula por su respectiva posición y dividiendo la suma total entre la suma de todas las masas del sistema.
Ilustración 14 Centro de gravedad para un cuerpo compuesto por muchas partículas
Ilustración 13 esquema que muestra un método sencillo para determinar el centro de gravedad de un cuerpo cualquiera.

40
El centro de masas será por lo tanto el punto resultante de graficar el resultado (xCG, yCG) en el plano cartesiano. Ejercicios: 1. Encuentre el centro de gravedad del sistema mostrado en las siguientes figuras. ¿Está dentro o fuera del cuerpo? a) b)
2.
2. Considere a una persona sentada cuya pierna está en posición vertical, como se muestra en la figura. En la tabla se muestran las coordenadas del centro de masa del muslo, pierna y pie. Las masas de muslo, pierna y pie son, respectivamente, 0.106 M, 0,046 y 0,017 M, m la masa total del cuerpo. Encontrar el centro de gravedad del conjunto del muslo/pierna/pie de esta persona en esta postura.
3. Localice el centro de gravedad del conjunto del muslo/pierna/pie de ejercicio 1, si la persona está en la postura de pie. Las coordenadas xC.G. de cada parte son, respectivamente, 42,5 cm, 42,5 cm y 45,0 cm y las coordenadas para yC.G. son 76,6 cm, 32,8 cm y 3,3 cm.
Ilustración 15 Esquema que muestra bloques con diferentes masas y la posición del centro de gravedad CG para dicho sistema

41
UNIDAD III
Máquinas simples y su ventaja mecánica Máquinas simples El número de máquinas inventadas por el hombre para facilitar la aplicación de las fuerzas es muy grande, algunas muy complicadas, pero analizándolas se observa que todas resultan de la combinación de seis máquinas sencillas o simples. Estas máquinas simples son: palanca, polea, torno, plano inclinado, tornillo y cuña. Todavía podría reducirse más su número ya que la polea y el torno no son más que palancas, y el tornillo y la cuña, planos inclinados. Esta lista, sin embargo, no debe considerarse definitiva e inamovible. Algunos autores consideran a la cuña y al tornillo como aplicaciones del plano inclinado; otros incluyen a la ruedacomo una máquina simple; también se considera el eje con ruedas una máquina simple, aunque sean dos de estas juntas por ser el resultado. En una máquina simple se cumple la ley de la conservación de la energía: (la energía no se crea ni se destruye, solo se transforma). La fuerza aplicada, multiplicada por la distancia aplicada (trabajo aplicado), será igual a la fuerza resultante multiplicada por la distancia resultante (trabajo resultante). Una máquina simple, ni crea ni destruye trabajo mecánico, sólo transforma algunas de sus características. Trabajo realizado por una fuerza Se define al trabajo mecánico como una cantidad escalar igual al producto de las magnitudes del desplazamiento y de la componente de la fuerza en dirección de dicho desplazamiento, es decir es el producto interno entre el desplazamiento y la fuerza. El trabajo es una magnitud física escalar que se representa con la letra (del inglés Work) y se expresa en unidades de energía, esto es en julios o joules (J) en el sistema internacional de unidades. Por definición
cosW F d Fd

42
El trabajo hecho por una fuerza, es el producto de la magnitud de la fuerza, el desplazamiento sufrido por el objeto y coseno del ángulo que forma la dirección de la fuerza respecto a la dirección del desplazamiento. Si una fuerza actúa en dirección contraria al desplazamiento, su trabajo será negativo dado que el Angulo será 180° y cos 180° = -1. dado que solo la componente de la fuerza que está en la dirección del desplazamiento realiza trabajo, podemos utilizar la expresión
para calcular el trabajo hecho por una fuerza. En este caso debemos recordar que:
W=T = trabajo realizado en N m= joule. F = fuerza en la dirección del movimiento en N. d= distancia desplazada en metros.
Ejemplo Un archivero es jalado con una fuerza de 360 N que forma un ángulo de 35º respecto a la dirección del desplazamiento despreciando la fuerza de fricción entre el piso y el archivero. ¿Cuál es el trabajo realizado al desplazar dicho archivero una distancia de 4.0 m? Como el archivero se mueve horizontalmente sólo la componente horizontal de la fuerza es la que produce el trabajo para trasladarlo, por lo que se utiliza la ecuación:
Sustituyendo en la ecuación y efectuando las operaciones se tiene:
Ejercicios de reforzamiento. 1. ¿Qué cantidad de trabajo se realiza arrastrando un carrito si se recorre una distancia de 150 m
aplicando una fuerza de 50 N por medio de una cuerda que forma un ángulo de 45° con la horizontal?
2. Un bloque de 2.5 kg de masa es empujado 2.2 m a lo largo de una mesa horizontal sin fricción por una fuerza constante de 16.0 N dirigida a 25° debajo de la horizontal. Encuentre el trabajo

43
efectuado por: (a) la fuerza aplicada, (b) la fuerza normal ejercida por la mesa, (c) la fuerza de la gravedad, y (d) la fuerza neta sobre el bloque.
3. Dos objetos que tienen masas m1 = 10.0 kg y m2 = 8.0 kg cuelgan de una polea sin fricción, como muestra la figura. (a) Determine el trabajo realizado por la fuerza de la gravedad sobre cada objeto por separado cuando la masa de 10.0 kg se desplaza 0.50 m hacia abajo. (b) ¿cuál es el trabajo total realizado sobre cada objeto, incluido el efectuado por la fuerza de la cuerda? (c) Redacte un comentario acerca de cualquier relación que haya descubierto entre estas cantidades.
4. Un bloque de 15 kg es arrastrado con velocidad constante sobre una superficie horizontal rugosa por una fuerza de 70 N que actúa a 20° sobre la horizontal. El bloque se desplaza 5.0 m y el coeficiente de fricción cinético es 0.30. Determine el trabajo realizado por (a) la fuerza de 70 N, (b) la fuerza normal, y (c) la fuerza de la gravedad. (d) ¿Cuál es la energía perdida debido a la fricción?
Palancas
La palanca es una barra rígida que puede girar alrededor de un punto fijo o eje, cuando se le aplica una fuerza para vencer la resistencia. Es usada para vencer la mayor resistencia con el esfuerzo aplicado. Las palancas se clasifican en 1ª,2ª y 3ª clase, esto se hace según la ubicación del punto de apoyo A (llamado fulcro), de la fuerza motora F y de la resistencia. Haremos también una distinción de la “palanca matemática” (en la que no se considera el peso de la palanca) y la “palanca física” (en la que sí se considera el peso de la palanca). Esta máquina es una aplicación directa del principio de momentos donde una de las fuerzas (la resistencia R) hace girar la palanca en un sentido. Es decir, constituye un momento R´x r respecto de A; mientras que la otra fuerza (motriz F), en el sentido contrario, tiene un momento de inercia determinado por F x d (d y r son los brazos respectivos). La condición para que una palanca se mantenga en equilibrio es que la suma de los momentos de fuerza motriz y de la resistencia sean nulas.
O sea: F d Rr lo cual representa la ley de la palanca.
d Su valor debe estar en metros

44
r Su valor debe estar en metros
“El producto de la fuerza por su brazo es igual al producto de la resistencia por su brazo” Palancas de primera clase Como dijimos al principio, son aquellas en la cuales su punto de apoyo está entre la resistencia y la fuerza motriz. El equilibrio se da porque la fuerza F da un momento positivo M+ = F ´ d que se anula con el momento negativo de la resistencia R M- = R´ r . Al producirse esta estabilización de momentos, la ecuación de equilibrio es la mencionada anteriormente. (F x d = Rxr) De esta ecuación podemos calcular el valor de F necesario para poder equilibrar una fuerza de resistencia R, a través de la siguiente:
Con la ecuación mostrada anteriormente para obtener el valor de F se puede concluir que para obtener una mayor economía de fuerza conviene que el brazo de la fuerza motora sea grande y el de la resistencia pequeño. Ejemplo: Se tiene una palanca de 4m de largo en la que hay una carga de 20kg, que está a 2,7m del eje. ¿Cuál será el valor de la fuerza motora si esta fuerza se encuentra a 1.3 m del eje? El peso de la barra es despreciable. Solución: el peso a levantar es P=mg=(20Kg)(9.8m/s2)=1960 N. Este valor constituye la fuerza de resistencia R.
Ejemplo de palanca física de 1ª clase. (Considerando el peso de la palanca). Consideraremos la barra como un material grueso y uniforme, es decir que su centro de gravedad ‘G’ está en el centro de ella donde actúa su peso P mg con un brazo “v”. Habíamos quedado en que la Resistencia producía un momento negativo igual a R r que era equilibrado por el momento positivo de F d, pero ahora le agregaremos el peso de la palanca (P = mg), con lo queda la siguiente expresión: F d mg v R r En la figura se puede ver que el peso está a favor de la fuerza.

45
Ejemplo: Para mover una piedra (Q) que hace una fuerza de 20 kg (en la barra hace una fuerza resistente de 200N) se usa una barra de 1.6 m de largo y de 1 kg (o sea hace una fuerza de 10N) de peso, como se muestra en la figura. ¿Dónde debe situarse el punto de apoyo si en el extremo de la barra una persona hace una fuerza de 6kg? Desarrollo: r = x = el brazo de la resistencia v = 80 – x = el brazo del peso (ya que G es el punto medio de la barra) d = 160 – x = el brazo de la fuerza Ahora realizamos la ecuación igualando los momentos positivos con los negativos y queda: 60 * (160 - x) + 10 * (80 – x) = 200x Resolviendo la ecuación nos queda x = 38.5 cm=0.38 m. Ahora mostraremos unos ejemplos de palancas de primera clase. Podemos ver que el cuerpo humano está lleno de palancas de distintas clases, por ejemplo, la cabeza, donde su peso es contrarrestado por la acción de la musculatura de la nuca, tomando la columna vertebral como punto de apoyo. También la ‘típica’ balanza que se encarga de pesar la carga, esta debe reunir por lo menos tres condiciones que son: Ser sensible (que cuando en uno de sus platillos le coloque un peso debe perder su equilibrio, por muy pequeña que sea la carga), también debe ser exacta (que al colocar pesos iguales en los platillos debe recuperar su posición de equilibrio) y finalmente debe ser estable (debe volver a la posición de equilibrio).
Este instrumento, suele estar en los martillos, aquí la fuerza la realiza la persona que intenta sacar el clavo. La carga es la resistencia del clavo al ser extraído. Un material de uso diario, las tijeras. Son dos palancas combinadas de primer grado. Estas realizan un fuerte acción de corte cerca del punto de apoyo. La carga es la resistencia del material a la acción de corte de las hojas de las tijeras.
Finalmente “la carretilla de dos ruedas”, usada para trasladar los objetos pesados. Basta inclinar las varas de la carretilla para poder transportar una pesada carga con un pequeño esfuerzo.

46
Palancas de segunda clase En este tipo de palancas el punto de apoyo está en un extremo de ella, la potencia o fuerza motriz (F) en el otro extremo y la resistencia (R) en algún punto intermedio. Si vemos el dibujo, podemos llegar a las siguientes conclusiones:
M+ F d, la resistencia R da un momento positivo.
M- Rr, la fuerza motriz produce un momento negativo.
Luego para que se quede en equilibrio tenemos que F d Rr.
Podemos ver como la fórmula obtenida es exactamente la misma que para una palanca de primer género. Así si tenemos un brazo suficientemente grande se puede vencer una resistencia grande aplicando una potencia pequeña. Ejemplo: Suponga una carretilla de masa despreciable que mide 1m, que está cargando un libro de física que pesa 2 kg. Determine la distancia que hay entre el punto de apoyo y la carga, si la fuerza aplicada sobre el estudiante es de 10N.
Ejemplo de palanca de segunda clase: Cuando caminamos, nuestro pie se apoya en los dedos al caminar: La fuerza motora la hace el músculo de la pantorrilla y la resistencia es el peso del cuerpo.
El “abridor de botellas”, al levantar el mango, se supera la fuerte resistencia de la tapa. Finalmente, la carretilla, Al levantarla de las varas es posible levantar una pesada carga que se halla más cerca del punto de apoyo, la rueda.
Palancas de tercera clase Se caracteriza por ejercerse la fuerza “a aplicar” entre el fulcro y la fuerza a vencer.
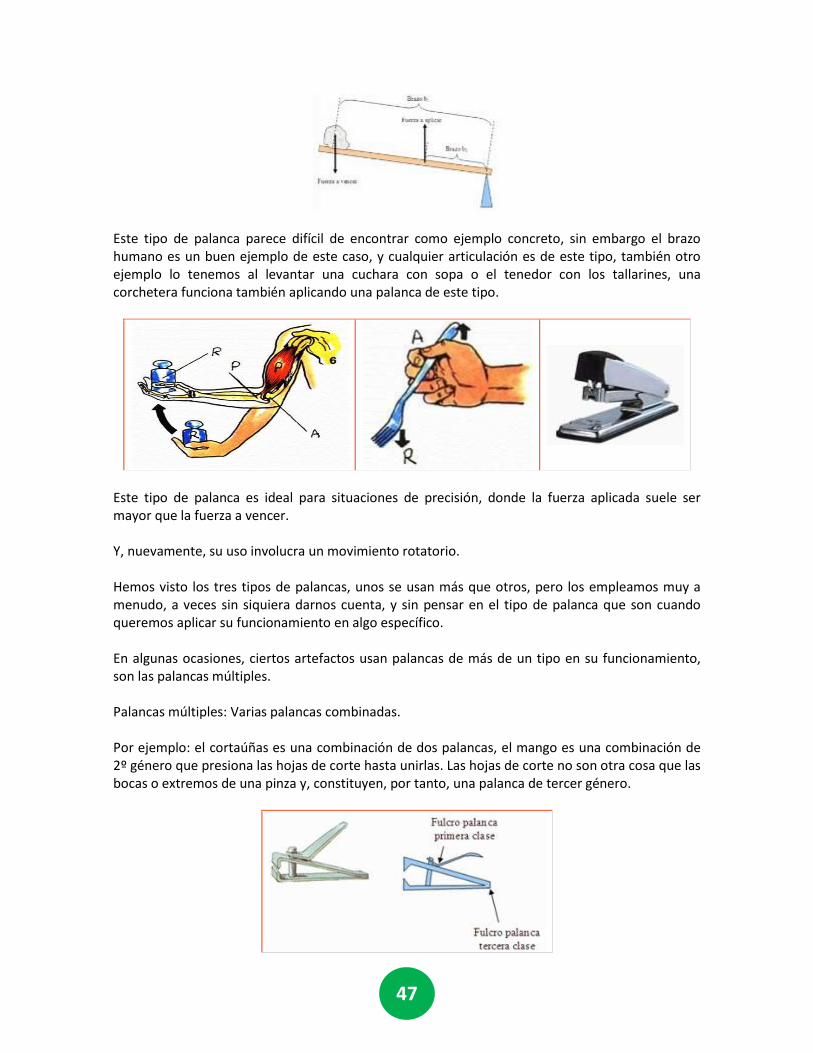
47
Este tipo de palanca parece difícil de encontrar como ejemplo concreto, sin embargo el brazo humano es un buen ejemplo de este caso, y cualquier articulación es de este tipo, también otro ejemplo lo tenemos al levantar una cuchara con sopa o el tenedor con los tallarines, una corchetera funciona también aplicando una palanca de este tipo.
Este tipo de palanca es ideal para situaciones de precisión, donde la fuerza aplicada suele ser mayor que la fuerza a vencer. Y, nuevamente, su uso involucra un movimiento rotatorio. Hemos visto los tres tipos de palancas, unos se usan más que otros, pero los empleamos muy a menudo, a veces sin siquiera darnos cuenta, y sin pensar en el tipo de palanca que son cuando queremos aplicar su funcionamiento en algo específico. En algunas ocasiones, ciertos artefactos usan palancas de más de un tipo en su funcionamiento, son las palancas múltiples. Palancas múltiples: Varias palancas combinadas. Por ejemplo: el cortaúñas es una combinación de dos palancas, el mango es una combinación de 2º género que presiona las hojas de corte hasta unirlas. Las hojas de corte no son otra cosa que las bocas o extremos de una pinza y, constituyen, por tanto, una palanca de tercer género.
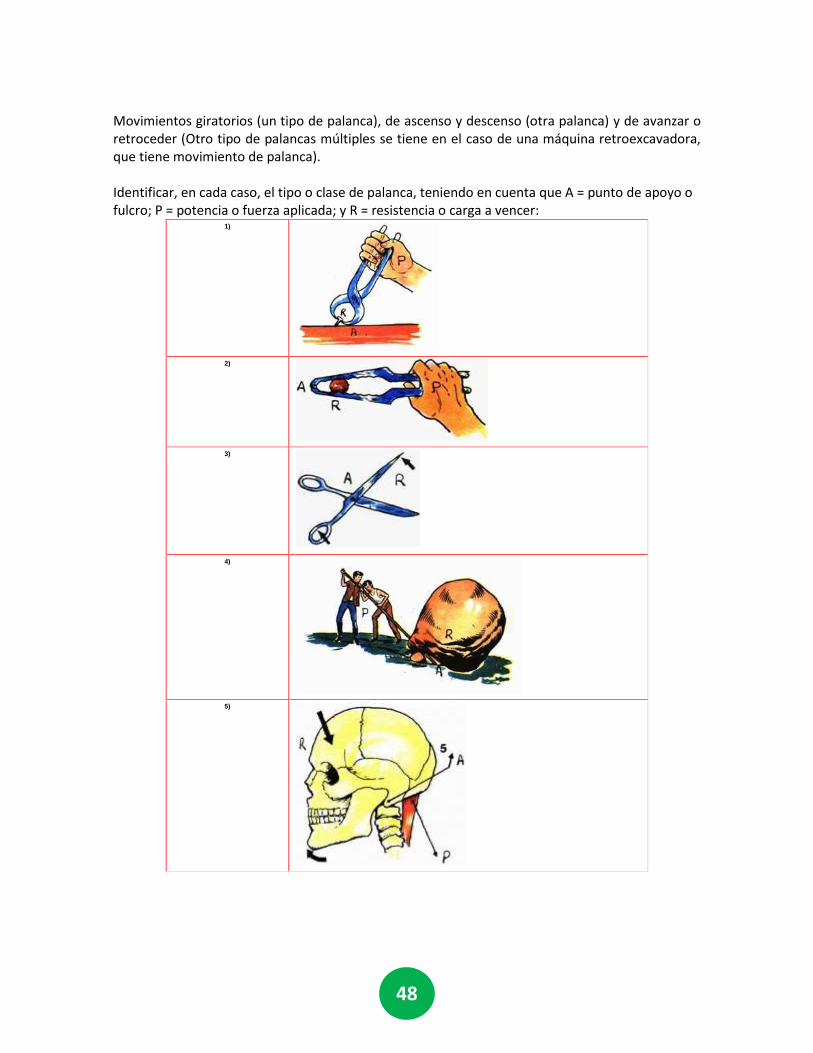
48
Movimientos giratorios (un tipo de palanca), de ascenso y descenso (otra palanca) y de avanzar o retroceder (Otro tipo de palancas múltiples se tiene en el caso de una máquina retroexcavadora, que tiene movimiento de palanca). Identificar, en cada caso, el tipo o clase de palanca, teniendo en cuenta que A = punto de apoyo o fulcro; P = potencia o fuerza aplicada; y R = resistencia o carga a vencer:
1)
2)
3)
4)
5)

49
6)
7)
8)
9)
10)
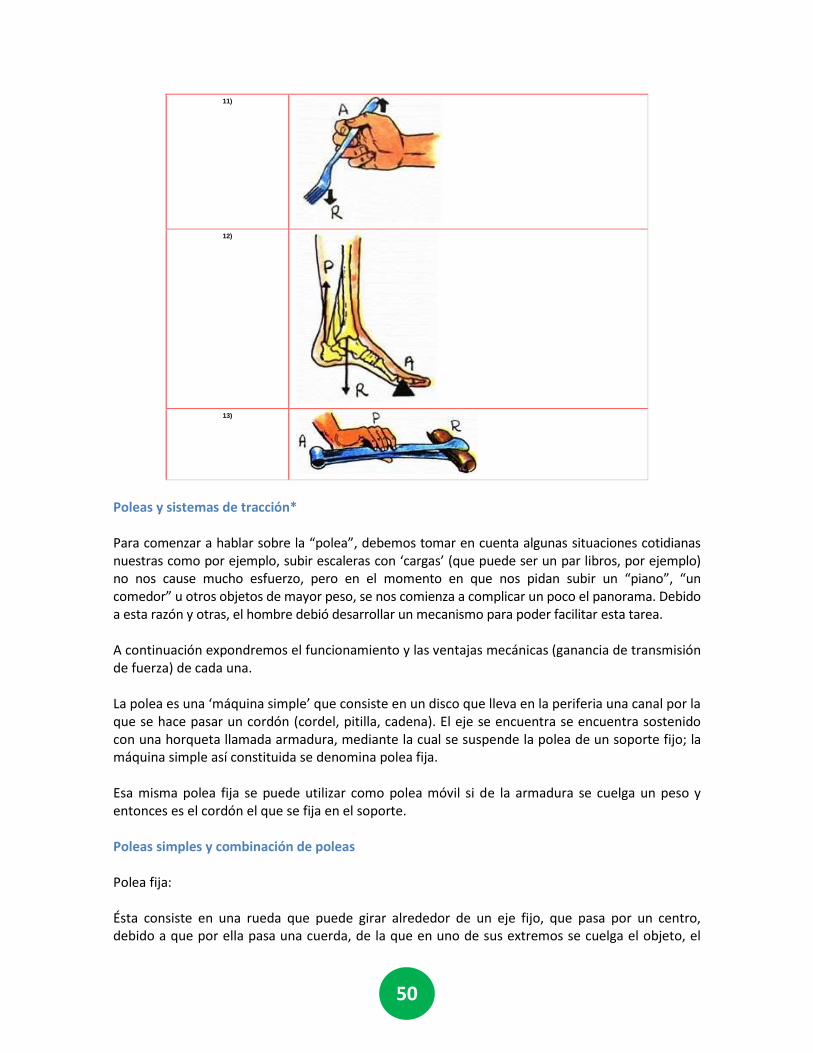
50
11)
12)
13)
Poleas y sistemas de tracción* Para comenzar a hablar sobre la “polea”, debemos tomar en cuenta algunas situaciones cotidianas nuestras como por ejemplo, subir escaleras con ‘cargas’ (que puede ser un par libros, por ejemplo) no nos cause mucho esfuerzo, pero en el momento en que nos pidan subir un “piano”, “un comedor” u otros objetos de mayor peso, se nos comienza a complicar un poco el panorama. Debido a esta razón y otras, el hombre debió desarrollar un mecanismo para poder facilitar esta tarea. A continuación expondremos el funcionamiento y las ventajas mecánicas (ganancia de transmisión de fuerza) de cada una. La polea es una ‘máquina simple’ que consiste en un disco que lleva en la periferia una canal por la que se hace pasar un cordón (cordel, pitilla, cadena). El eje se encuentra se encuentra sostenido con una horqueta llamada armadura, mediante la cual se suspende la polea de un soporte fijo; la máquina simple así constituida se denomina polea fija. Esa misma polea fija se puede utilizar como polea móvil si de la armadura se cuelga un peso y entonces es el cordón el que se fija en el soporte. Poleas simples y combinación de poleas Polea fija: Ésta consiste en una rueda que puede girar alrededor de un eje fijo, que pasa por un centro, debido a que por ella pasa una cuerda, de la que en uno de sus extremos se cuelga el objeto, el

51
que se puede subir tirando(jalando) la cuerda con la mano desde el otro extremo. Es acanalada en su periferia y por ella pasa una cuerda. Al sostener el peso R debemos aplicar una fuerza F. Y para que la polea no rote la suma de los momentos de las fuerzas aplicadas debe ser cero, o sea: F * r – R * r = 0 de donde F = R lo cual indica que la fuerza motriz es igual a la resistencia (en ausencia de roce, ya que con él la fuerza F es un poco mayor). Entonces se deduce que con el uso de una polea fija no se obtiene ahorro de fuerza, pero proporciona seguridad y comodidad al trabajar con ella. Si vemos sus aplicaciones podemos encontrar más beneficios: por ejemplo cuando se utiliza como roldana para subir el agua de un pozo, o un balde en un edificio en construcción, un ascensor. Con esto se concluye que la polea fija cambia únicamente la dirección de la fuerza. También podemos afirmar que a las poleas fijas se les puede considerar también como una palanca de 1ª clase de brazos iguales. La longitud del brazo sería ‘r’. Por lo tanto F = R, es decir, el peso del objeto es igual a la fuerza que debemos aplicar. Ejemplo de polea fija: Se construye un ascensor a escala, el cual es sometido a una fuerza F = 21.17 N, determine la masa de la carga expresada en Kg, y la Resistencia. La fuerza debemos dividirla por 9.8, ya que la unidad Newton indica la aceleración en un segundo de un cuerpo de masa ‘m’. Por lo que nos queda que la masa es igual a 2.16 Kg. Finalmente la Resistencia tiene un valor igual al de la fuerza, R= 21.17N Ejemplo 2. En un pozo un señor sacó agua gracias a una polea fija que la gente del pueblo había comprado. El quiere medir la profundidad del pozo (hasta donde empieza el agua). ¿Cómo lo haría, sabiendo que la masa del balde con agua es de 5.18kg, y que aplicó una fuerza de 50.75N, y que el señor se desplazó 1370m? Solución: Debemos saber que la profundidad aproximada del pozo será igual al desplazamiento de la cuerda ejercida por la Fuerza F, ya que la polea fija no nos otorga una ventaja mecánica, sólo cambia de sentido la fuerza. Por lo que el señor, debería medir con una huincha desde la polea hasta donde llegó. Es decir, la distancia que hay desde la polea hasta el inicio del lugar donde hay agua es de 1370m aproximadamente.

52
Polea móvil: A diferencia de la polea fija la polea móvil se apoya sobre la cuerda y debido a eso multiplica la fuerza ejercida, por lo que vendría siendo una palanca de segunda clase. También tiene un movimiento de rotación (sobre su eje) y otro de traslación, este es debido a que está en la cuerda. El peso del objeto se descompone entre las dos ramas del cordel; luego la fuerza aplicada será sólo la mitad de la resistencia (Esto en ausencia de roce). Si se pone a trabajar una polea móvil veremos que la rotación se produce alrededor del punto 0. Para que esté en equilibrio, la suma de los torques producidos por la fuerza motriz y la resistencia debe ser cero. Esto corresponde a: La resistencia que actúa con brazo ‘r’ y la fuerza ‘F’ con 2r. Luego: F * 2r = R * r De donde F = R/2 ó -R * r + F * 2r = 0
En la polea móvil se produce equilibrio cuando la fuerza motora es igual a la mitad de la resistencia. Esto quiere decir que la polea móvil economiza el 50% de la fuerza ventaja mecánica), pero es incómoda y peligrosa para trabajar; por este motivo se la usa combinada con una polea fija obteniéndose las ventajas de ambas; “economía de fuerza y mayor comodidad para trabajar”. En la práctica, para aumentar más la ventaja mecánica de la polea, suelen emplear grupos de estas, llamadas en general aparejos F= R/2.
Sistemas de tracción Garrucha ordinaria (o motón):
Se compone de dos armaduras con cierto número de poleas; Una de las armaduras permanece fija, que es la que tiene la o las poleas fijas, y la otra móvil, de la que cuelga el cuerpo que se va a levantar. Su funcionamiento se debe a que el peso resistente ‘R’ (que está compuesto por el peso de la carga (objeto) más el de la armadura correspondiente) está sujeto por un número ‘n’ de trazos de cuerdas; luego cada una equilibra a la ‘enésima’ parte de R y como uno de los cordeles pasa por una polea fija, que
no economiza fuerza (su ventaja mecánica es nula), resulta la siguiente ecuación: F = R/n Es lógico deducir que entre mayor sea la cantidad de poleas, menor será la fuerza motora necesaria para lograr el equilibrio, este se produce cuando la fuerza motora es igual a la resistencia dividido por el número total de poleas. Lo dicho anteriormente es en el caso de que no hay roce. En esta figura vemos que hay 6 poleas, por lo que Fuerza resultante para equilibrar esta garrucha será igual a:
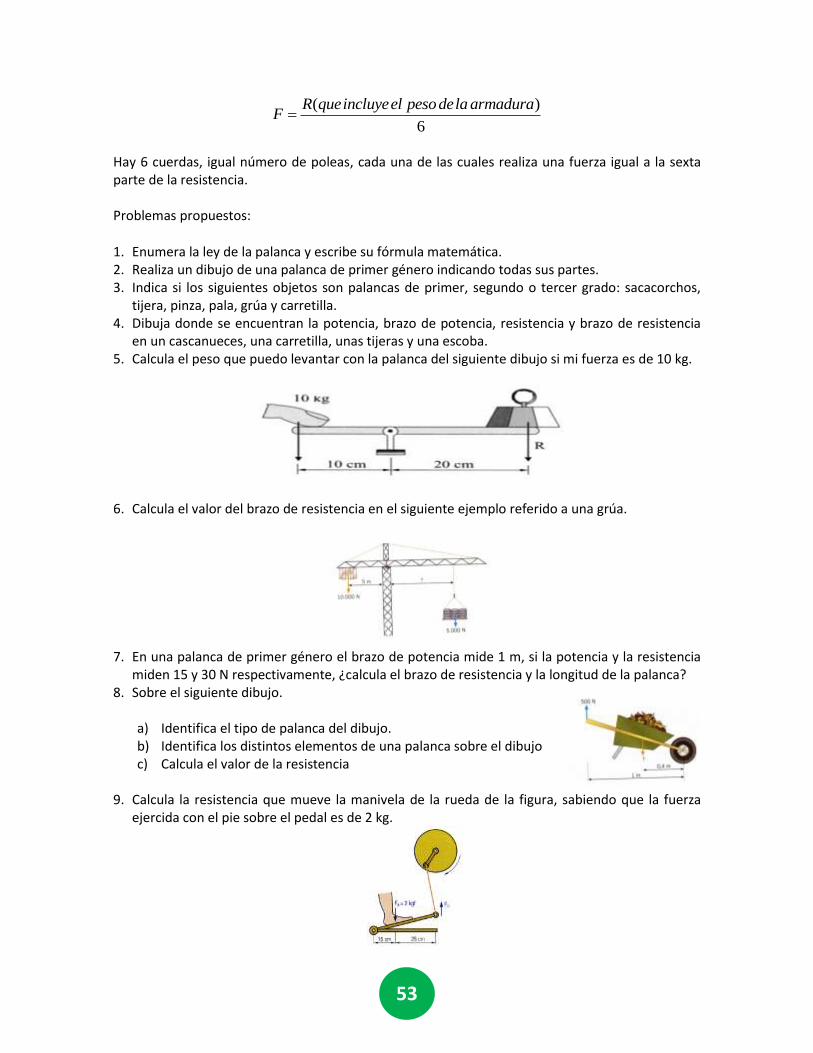
53
( )
6
R queincluyeel pesodela armaduraF
Hay 6 cuerdas, igual número de poleas, cada una de las cuales realiza una fuerza igual a la sexta parte de la resistencia. Problemas propuestos:
1. Enumera la ley de la palanca y escribe su fórmula matemática. 2. Realiza un dibujo de una palanca de primer género indicando todas sus partes. 3. Indica si los siguientes objetos son palancas de primer, segundo o tercer grado: sacacorchos,
tijera, pinza, pala, grúa y carretilla. 4. Dibuja donde se encuentran la potencia, brazo de potencia, resistencia y brazo de resistencia
en un cascanueces, una carretilla, unas tijeras y una escoba. 5. Calcula el peso que puedo levantar con la palanca del siguiente dibujo si mi fuerza es de 10 kg.
6. Calcula el valor del brazo de resistencia en el siguiente ejemplo referido a una grúa.
7. En una palanca de primer género el brazo de potencia mide 1 m, si la potencia y la resistencia
miden 15 y 30 N respectivamente, ¿calcula el brazo de resistencia y la longitud de la palanca? 8. Sobre el siguiente dibujo.
a) Identifica el tipo de palanca del dibujo. b) Identifica los distintos elementos de una palanca sobre el dibujo c) Calcula el valor de la resistencia
9. Calcula la resistencia que mueve la manivela de la rueda de la figura, sabiendo que la fuerza
ejercida con el pie sobre el pedal es de 2 kg.
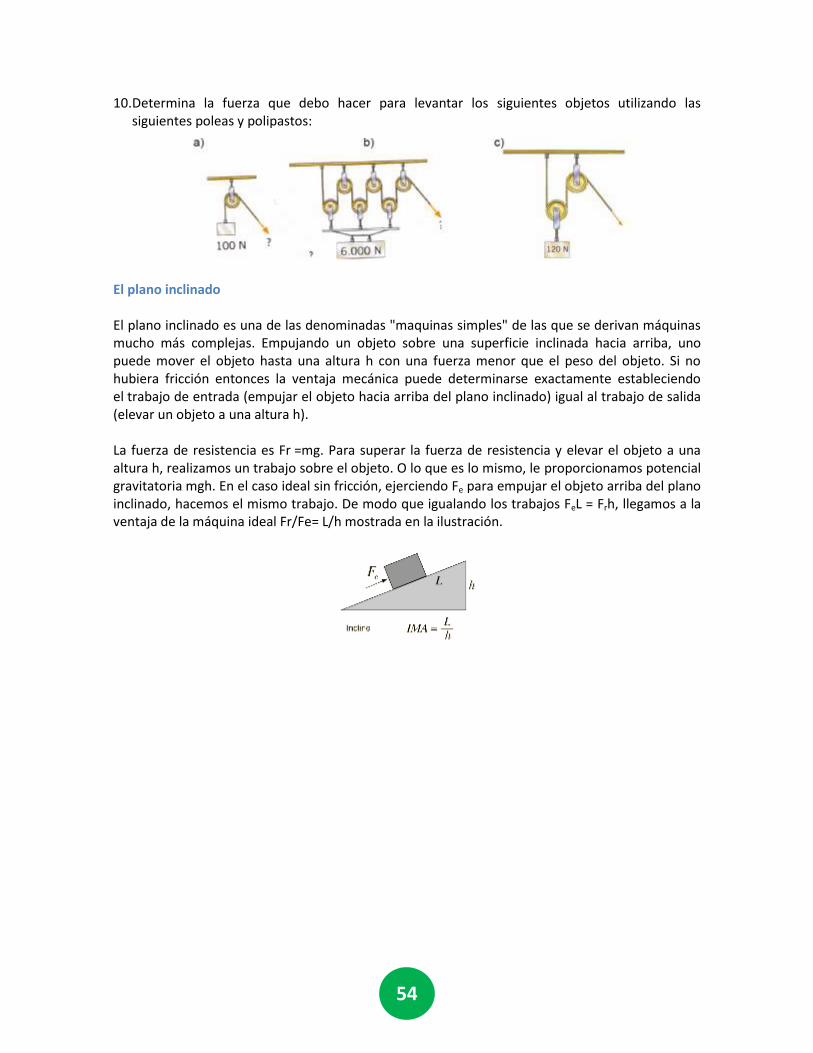
54
10. Determina la fuerza que debo hacer para levantar los siguientes objetos utilizando las siguientes poleas y polipastos:
El plano inclinado El plano inclinado es una de las denominadas "maquinas simples" de las que se derivan máquinas mucho más complejas. Empujando un objeto sobre una superficie inclinada hacia arriba, uno puede mover el objeto hasta una altura h con una fuerza menor que el peso del objeto. Si no hubiera fricción entonces la ventaja mecánica puede determinarse exactamente estableciendo el trabajo de entrada (empujar el objeto hacia arriba del plano inclinado) igual al trabajo de salida (elevar un objeto a una altura h). La fuerza de resistencia es Fr =mg. Para superar la fuerza de resistencia y elevar el objeto a una altura h, realizamos un trabajo sobre el objeto. O lo que es lo mismo, le proporcionamos potencial gravitatoria mgh. En el caso ideal sin fricción, ejerciendo Fe para empujar el objeto arriba del plano inclinado, hacemos el mismo trabajo. De modo que igualando los trabajos FeL = Frh, llegamos a la ventaja de la máquina ideal Fr/Fe= L/h mostrada en la ilustración.

55
UNIDAD IV
Conceptos básicos
de electricidad y magnetismo La electricidad tiene su origen por los 600 a. c. cuando en Mileto una ciudad de Asia Menor, Tale de Mileto (comerciante, Matemático, Astrónomo, Estadista y Filósofo), descubrió que al frotar una barra de ámbar con un paño o un trozo de piel, la barra adquiría la notable propiedad de atraer pequeños objetos muy liviano, tales como: barbas de pluma, cabellos, trocitos de papel, pedazos de corcho, etc. Los antiguos griegos admirados ante esta propiedad adquirida por el ámbar, trataron de explicarlo por medio de algún mecanismo. Unos le atribuyeron origen divino, otros creían que los cuerpos atraídos le servían de alimento al ámbar, otros suponían la existencia de una simpatía entre los cuerpos que atraían y los atraídos. La palabra Electricidad deriva de electrón, que en griego quiere decir ámbar, sin embargo, los griegos no utilizaron la palabra electricidad para definir los fenómenos antes expuestos. El físico francés, Marquez Du Fay, comprobó que un cuerpo electrizado después de entrar en contacto con otro sin electrizar también se electrizaba y luego se producía un rechazo. Al experimentar con una barra de vidrio frotada con seda y una barra de ámbar, frotada con piel observó que había un grupo de substancias que luego de ser electrizadas por el vidrio eran rechazadas por éste y otras que al ser electrizadas por el ámbar también eran rechazadas, pero que entre una sustancia del grupo rechazado por el vidrio y otra del grupo rechazado por el ámbar siempre se producía una atracción. De esto concluyó que había dos tipos de electricidad y las llamó: Electricidad “Vítrea” (del vidrio) y “Resinosa” (del ámbar). Benjamin Franklin, 1706-1790.Llamó positiva a la clase de electricidad que se produce en el vidrio y negativa a la que ocurre en el plástico (en su tiempo se empleaba lacre o ámbar) estos nombres han permanecido hasta la fecha. Franklin, lo mismo que algunos de sus antecesores llegaron a la conclusión de que las fuerzas entre los cuerpos electrizados obedecen siempre a la siguiente ley: “Los cuerpos cargados con

56
electricidad del mismo signo se repelen y los cargados con electricidad de signo contrario se atraen”. Esta ley es denominada Primera Ley de la Electricidad. Estructura atómica y carga eléctrica. En el siglo XIX, ya era aceptada la idea de que los elementos estaban formados por átomos eléctricamente neutros; número de cargas positivas igual al número de cargas negativas. Con los conocimientos de la época, nació el modelo atómico de Thomson, en el cual se consideraba que la mayor parte de la masa del átomo era la carga positiva (inmersa en ella estaba la carga negativa) (modelo del pastel de pasas). Este modelo prevaleció durante trece años, hasta 1911, Geiger y Marsden (por idea de Rutherford) decidieron averiguar si el modelo podría explicar el fenómeno de la reflexión eléctrica que ya se conocía. Lanzaron perpendicularmente sobre una hoja metálica
mados los átomos de helio a los que les faltan dos cargas negativas). Según Thomson, los átomos de un sólido estarían pegados unos a otros como bolas empaquetadas dentro de una caja y una partícula podría atravesar la lámina delgada sin sufrir desviaciones mayores. Los resultados obtenidos fueron los siguientes: Algunas partículas (con carga positiva) sufrieron grandes desviaciones y hasta regresaban sobre su misma trayectoria; otras sufrieron muy poca o ninguna desviación. De la primera se concluyó que las partículas habían chocado contra una concentración fuerte de carga positiva y por lo tanto, hubo repulsión. De la segunda observación se concluyó que las partículas pasaron por una región del átomo en la que no hubo acción de cargas eléctricas ni positivas, ni negativa o la acción fue muy débil. Es decir, en el átomo la carga positiva está concentrada (núcleo) y la negativa está a cierta distancia de él (electrones). Nace así el modelo atómico de Rutherford, en el cual se consideró la carga positiva concentrada en el núcleo y la negativa a a cierta distancia, moviéndose en torno a éste, para que la fuerza eléctrica de atracción fuera contrarrestada por la fuerza centrífuga originada por el movimiento circular. El modelo de Rutherford, respondía a las exigencias de los fenómenos relacionados con las partículas en esa época conocidas. Pero luego se descubre que toda carga en movimiento acelerado irradia energía por lo que si la carga negativa se está moviendo con una aceleración centrípeta tendría que perder energía hasta caer sobre el núcleo siguiendo una trayectoria en espiral. Lógicamente este modelo conduce a un átomo inestable, cosa que se sabe, no es así, ya que los átomos son dinámicamente estables, es decir, la carga negativa, no cae al núcleo. En busca de una respuesta a este nuevo problema nace el modelo atómico de Bohr, en el cual se explicó el fenómeno de la radiación de energía y de la estabilidad del átomo basándose en la idea del movimiento undulatorio para el movimiento de las cargas. Con esta teoría nace una rama de la Física: La Mecánica Cuántica.
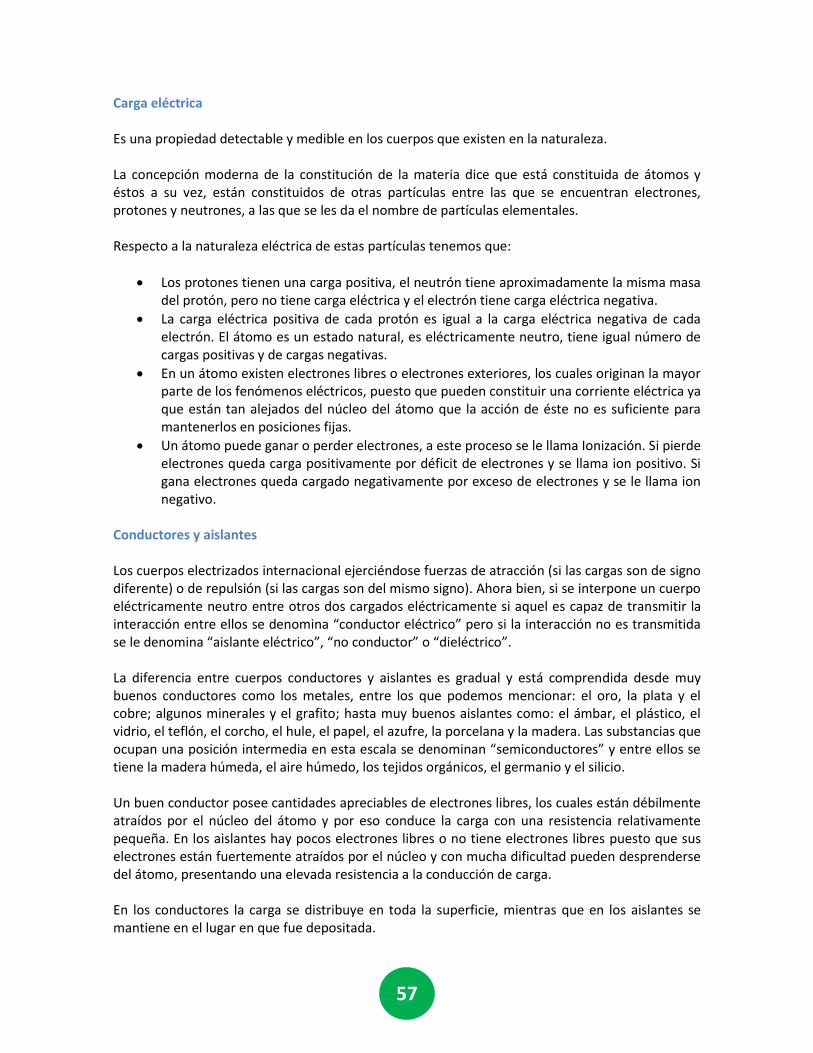
57
Carga eléctrica Es una propiedad detectable y medible en los cuerpos que existen en la naturaleza. La concepción moderna de la constitución de la materia dice que está constituida de átomos y éstos a su vez, están constituidos de otras partículas entre las que se encuentran electrones, protones y neutrones, a las que se les da el nombre de partículas elementales. Respecto a la naturaleza eléctrica de estas partículas tenemos que:
Los protones tienen una carga positiva, el neutrón tiene aproximadamente la misma masa del protón, pero no tiene carga eléctrica y el electrón tiene carga eléctrica negativa.
La carga eléctrica positiva de cada protón es igual a la carga eléctrica negativa de cada electrón. El átomo es un estado natural, es eléctricamente neutro, tiene igual número de cargas positivas y de cargas negativas.
En un átomo existen electrones libres o electrones exteriores, los cuales originan la mayor parte de los fenómenos eléctricos, puesto que pueden constituir una corriente eléctrica ya que están tan alejados del núcleo del átomo que la acción de éste no es suficiente para mantenerlos en posiciones fijas.
Un átomo puede ganar o perder electrones, a este proceso se le llama Ionización. Si pierde electrones queda carga positivamente por déficit de electrones y se llama ion positivo. Si gana electrones queda cargado negativamente por exceso de electrones y se le llama ion negativo.
Conductores y aislantes Los cuerpos electrizados internacional ejerciéndose fuerzas de atracción (si las cargas son de signo diferente) o de repulsión (si las cargas son del mismo signo). Ahora bien, si se interpone un cuerpo eléctricamente neutro entre otros dos cargados eléctricamente si aquel es capaz de transmitir la interacción entre ellos se denomina “conductor eléctrico” pero si la interacción no es transmitida se le denomina “aislante eléctrico”, “no conductor” o “dieléctrico”. La diferencia entre cuerpos conductores y aislantes es gradual y está comprendida desde muy buenos conductores como los metales, entre los que podemos mencionar: el oro, la plata y el cobre; algunos minerales y el grafito; hasta muy buenos aislantes como: el ámbar, el plástico, el vidrio, el teflón, el corcho, el hule, el papel, el azufre, la porcelana y la madera. Las substancias que ocupan una posición intermedia en esta escala se denominan “semiconductores” y entre ellos se tiene la madera húmeda, el aire húmedo, los tejidos orgánicos, el germanio y el silicio. Un buen conductor posee cantidades apreciables de electrones libres, los cuales están débilmente atraídos por el núcleo del átomo y por eso conduce la carga con una resistencia relativamente pequeña. En los aislantes hay pocos electrones libres o no tiene electrones libres puesto que sus electrones están fuertemente atraídos por el núcleo y con mucha dificultad pueden desprenderse del átomo, presentando una elevada resistencia a la conducción de carga. En los conductores la carga se distribuye en toda la superficie, mientras que en los aislantes se mantiene en el lugar en que fue depositada.
58
Al contrario de los que sucede en los metales, en los cuales los electrones libres conducen la electricidad en los líquidos la conducción de carga se debe a átomos positivamente cargados (iones positivos) y a átomos negativamente cargados (iones negativos) Cuando se disuelve sal de mesa (NaCl) en agua, los dos elementos se disocian formando un ion Na+ cargado positivamente y un ion Cl - cargado negativamente. El átomo de Cl ha ganado un electrón y el de sodio ha perdido uno quedando cargado positivamente. Esta solución llamada electrolito, es buena conductora. La conducción electrolítica es esencialmente el movimiento de estos iones en direcciones opuestas. Algunos electrolitos típicos son el cloruro de potasio (K+, Cl-), el ácido sulfúrico (H2+, SO 2-) y el agua misma (H+, OH-). El que un electrolito conduzca bien o mal la electricidad depende de la valencia química (número de electrones perdidos o ganados), el grado de disociación y la concentración iónica (número de iones por centímetro cúbico). como un ejemplo, una solución de KCl, es típicamente 109 veces más conductora que el vidrio, pero 108 veces menos conductora que la plata. No todas las soluciones conducen bien la electricidad depende de la disociación iónica. El aceite, el alcohol y el azúcar disueltos en agua son relativamente malos conductores. La piel humana seca al igual que la mayoría de las membranas biológicas es mala conductora. Sin embargo, los tejidos del cuerpo localizados bajo la piel son electrolitos, la solución salina fisiológica es básicamente una solución diluida de NaCl y el plasma sanguíneo contiene Na+, K+, Ca+, Mg2+, Cl- y otros iones. Electrostática 3.1 Métodos de carga estática

59
Ley de coulomb. Fuerza eléctrica entre cargas puntuales El físico francés Charles Coulomb (1736-1806) estudió con gran detalle la interacción que existe entre cargas eléctricas y cualificó por primera vez la atracción y repulsión eléctrica y dedujo la ley que las gobierna, utilizando un aparato llamado balanza de torsión. Las interacciones entre cargas eléctricas se les conocen como fuerzas eléctricas. Coulomb concluyó de sus experimentos que la fuerza eléctrica depende de la cantidad de carga que tengan los cuerpos y también de su separación. La ley de Coulomb se enuncia así: “La fuerza entre dos cuerpos cargados es directamente proporcional al producto de las cargas e inversamente proporcional al cuadrado de la distancia que las separa”.
Figura 3. Ley de Coulomb.
Sean q1 y q2 dos cargas puntuales y r la separación entre ellas.
Lo anterior puede expresarse así:2
21
r
qqFe
Como ecuación matemática 2
21
r
qqkFe
donde k = constante de proporcionalidad y tiene un valor de
k = 9 x 109 N m2/C2 k = 1 Dina x cm2/StactC2
La fuerza eléctrica puede ser de atracción o de repulsión. Si Fe es (+) es de repulsión y si Fe es (-) es de atracción. Campo eléctrico Campo: Es toda región del espacio en la cual existe distribuida alguna propiedad que puede ser identificada como un magnitud física. Los campos se pueden clasificarse en: Escalares y vectoriales.

60
Un campo es Escalar, si la magnitud física identificada es una magnitud escalar. Ejemplo: Campo de temperatura, región en la que se puede medir temperaturas; campo de densidades, región en la que se puede medir la densidad de una sustancia. Un campo es Vectorial, si la magnitud física identificada es una magnitud vectorial. Ejemplo: El campo gravitatorio de la tierra, que es la que rodea a la tierra en la cual todo cuerpo es atraído hacia la tierra. En un campo gravitatorio actúa la fuerza gravitatoria. El campo eléctrico, es una magnitud vectorial y es la región que rodea a una carga eléctrica en la cual ésta ejerce influencia sobre las cargas que la circundan. En un campo eléctrico actúa la fuerza eléctrica. En esta región la carga eléctrica lleva a cabo las acciones de atracción y repulsión. Para comprobar si existe un campo eléctrico en un punto determinado, se utiliza una carga puntual q, denominada carga de prueba, a la cual se le asigna signo positivo. El módulo del campo eléctrico se calcula así:
Como 20
0
0 rq
Qqk
q
FeE entonces
2r
QkE
donde Q = carga que produce el campo eléctrico. Unidades de E Newton/Coulom (N/C) ó Dinas/ StatC Campos eléctricos producidos por cargas puntuales y placas paralelas Línea de Fuerzas. Faraday introdujo el concepto de líneas de fuerza con el fin de representar geométricamente el campo eléctrico. Se establecen dos convenciones para trazar las líneas de fuerza con las que se tiene la visualización del campo eléctrico con lo cual obtendremos la dirección y sentido del campo eléctrico como también tendremos idea de su intensidad en cada punto. Una línea de fuerza, es una línea que se traza en un campo eléctrico de tal modo que el vector E (campo eléctrico) sea tangente a ella en cada punto. La densidad de las líneas de fuerzas, es proporcional a la intensidad del campo. Así, donde el campo eléctrico es intenso, las líneas de fuerza se trazan más próximas y donde el campo eléctrico es débil, las líneas de fuerza se trazan separadas.

61
Características: 1) Dos líneas de fuerza no se entrecruzan. Por un punto dado solo puede haber un vector E. 2) Las líneas de fuerza se trazan saliendo de las cargas positivas y entrando a las cargas negativas. Para dos placas paralelas con cargas iguales pero de signo opuesto, separadas una distancia pequeña “d” se observa que entre dichas placas se produce un campo eléctrico uniforme, es decir Ex en cualquier punto entre las placas presenta el mismo modulo, dirección y sentido. Potencial eléctrico Cuando un cuerpo de masa “m” se encuentra a una distancia “r” del centro de la tierra, este experimentara una fuerza gravitatoria “Fg” cuyo valor queda determinado por:
2r
mGMF
T
g
En el sistema Tierra-masa, se encuentra almacenada cierta cantidad de energía en forma de energía potencial gravitatoria (Ug), que resulta ser una medida de la capacidad que tiene el campo gravitatorio para realizar trabajo sobre la masa “m”.
r
mGMU
T
g
Si analizamos la energía potencial gravitatoria por unidad de masa tenemos:
r
GM
m
U Tg
que se denomina potencial gravitatorio.
Análogamente, cuando se tiene una carga de prueba “q” en un punto cualquiera del espacio que rodea a una carga “Q” a una distancia “r” se dice que existe un potencial eléctrico dado por:
r
kQU e
El potencial eléctrico se presenta por V, es decir: r
kQV
Unidades de potencial eléctrico:
Coulomb
JoulVoltio
ergioStatV
StatC

62
DIFERENCIA DE POTENCIAL
Supongamos que una carga de prueba se desplaza entre los puntos A y B dentro de un campo eléctrico: Se define la diferencia de potencial entre dos puntos A y B, como el trabajo realizado por el campo eléctrico para desplazar la carga entre esos dos puntos. La diferencia de potencial entre A y B se expresa así: VA - VB = WAB /q La diferencia de potencial suele denominarse también voltaje o tensión entre dos puntos y podrá representarse por VA - VB o VAB o simplemente por V.
Al hablar de diferencia de potencial entre dos puntos, se suele dar el potencial de un punto. Para esto, se escoge un nivel arbitrario para el potencial y el valor del potencial de un punto cualquiera se calculará en relación a este nivel. Por ejemplo, si la diferencia de potencial entre los puntos A y B es VA - VB = 70 V, podemos escoger el punto B como nivel de potencial y haciendo VB = O, obtenemos que VA = 70 V, relativo al punto B. El concepto de voltaje es de los más importantes en el estudio de los fenómenos eléctricos y está íntimamente relacionado con nuestra vida diaria. Por ejemplo, se está familiarizando con el hecho de que existen en nuestras casas y en nuestros laboratorios “Tomas de electricidad de 120 V”, esto significa que cada coulomb que se desplaza entre los terminales de este toma, recibe 120 Joules de energía del campo eléctrico que existe entre los dos puntos A y B. Otros tomas de corriente son de 240 V. En este caso, cada coulombio recibe 240 Joules de energía al desplazarse entre los puntos A y B. Estos toma corriente sirven para poner a disposición energía eléctrica y ser utilizada para operar equipo electrónico. Existen en la actualidad muchos dispositivos eléctricos que se utilizan en la industria de la electrónica y que pueden compararse al funcionamiento fisiológico de algunas estructuras. En este curso nos interesa mencionar las más importantes como son: los capacitores y las resistencias. Corriente eléctrica y flujo eléctrico El estudio de la corriente eléctrica, es de gran importancia ya que nos permite comprender muchas de las aplicaciones de la electricidad dentro de nuestras actividades así como también, para explicar y comprender algunos comportamientos de sistemas biológicos.
A
B
Diferencia de Potencial y líneas equipotenciales

63
Por ejemplo, las anguilas eléctricas crean grandes voltajes como mecanismos de defensa, algunos peces navegan por medio de pequeñas corrientes que establecen en el agua, también se pueden explicar el transporte de impulsos nerviosos a lo largo de las fibras nerviosas. Como sabemos, en un conductor existen cargas libres, o sea cargas que pueden moverse libremente en el interior de un conductor. Si aplicamos un campo eléctrico en el interior de un conductor, este campo actuará sobre las cargas libres, poniéndolas en movimiento ordenado, entonces decimos que se establece una corriente eléctrica en el conductor. Cuando no existe campo eléctrico, las cargas libres se encuentran en movimiento desordenado debido a la agitación térmica. Al hablar de la estructura atómica de la materia, analizamos que en el átomo, las cargas eléctricas que se mueven son los electrones por lo tanto podemos definir la corriente eléctrica así: Corriente eléctrica en un conductor sólido (metal), es el desplazamiento de electrones libres entre dos puntos que se encuentran con una diferencia de potencial. Estos electrones libres se desplazan en forma ordenada en sentido contrario al campo eléctrico aplicado. Para un conductor líquido (electrolito) las cargas libres son iones positivos y negativos, observándose que al aplicar un campo eléctrico los iones positivos se desplazan en la dirección del campo y los iones negativos en sentido contrario. Así, en un conductor líquido, la corriente eléctrica está constituida por el movimiento de iones positivos y negativos en sentido contrario. Sentido de la corriente eléctrica. En los conductores metálicos, puede decirse que existen dos sentidos para la corriente eléctrica:
a) Sentido Convencional. Considera que la corriente eléctrica es el movimiento de cargas positivas o sea de positivo o negativo.
b) Sentido Real o Físico. Que es el verdadero, en el cual la corriente se debe a las cargas negativas o sea de negativo a positivo.
Intensidad de la Corriente Eléctrica (I). Se define como intensidad de corriente eléctrica, la cantidad de carga eléctrica que atraviesa la sección de un conductor en la unidad de tiempo.
t
QI
Donde: I = Intensidad de corriente eléctrica Q = Carga que atraviesa la sección del conductor t = tiempo
64
Unidades de corriente eléctrica. En el Sistema Internacional (SI) la unidad de corriente eléctrica es el amperio (A), donde
A =C/s
Para corrientes muy pequeñas se utiliza el miliamperio (mA) o el microamperio (A). donde 1 mA = 10-3 A y 1 uA = 10-6A. Tipos de Corriente Eléctrica. La corriente eléctrica puede ser: a) Directa o continua (CD). Es el movimiento de cargas en una misma dirección. En este tipo de corriente, el campo eléctrico apunta siempre en el mismo sentido. Esta corriente es producida por pilas de linternas (pilas secas), por baterías de automóviles (pilas húmedas), por celdas fotovoltaica (celdas solares). b) Alterna (AC). Se refiere a una corriente en la cual, las carga libres cambian periódicamente de sentido, esto es, las cargas libres se desplazan en un sentido y luego en sentido contrario. En este tipo de corriente, el vector campo eléctrico cambia periódicamente de sentido. La corriente que las empresas eléctricas alimentan a las casas y en las industrias es alterna. La corriente alterna, es producida por un generador eléctrico, en el cual la variación es sinusoidal. Normalmente la frecuencia de la corriente alterna que usamos es de 60 Hertz (60 ciclos/s), es decir, que los electrones en el conductor ejecutan 60 vibraciones completas en un segundo. Circuitos eléctricos básicos: Ley de Ohm y Leyes de Kirchhoff Un circuito eléctrico es toda trayectoria cerrada por la que puede circular una corriente eléctrica. Los elementos principales de un circuito eléctrico son:
El generador de corriente o fuente de energía que puede ser una batería o un generador eléctrico.
La carga o resistencia, es la que utiliza la energía eléctrica y lo forman las luminarias eléctricas, monitores, refrigeradores, equipo médico, motores, y todo equipo electrónico que reciben la energía eléctrica y la transforman en otras formas de energía o en formas de comunicación de datos.
Los conductores, mediante los cuales se transporta la corriente eléctrica desde el generador hasta los receptores y desde estos al generador.
Los interruptores, utilizados para abrir o cerrar un circuito y las protecciones, que pueden ser fusibles, circuito breakers, dispositivos termomagnéticos o algún otro circuito que sirva para proteger toda la instalación.
Representación gráfica de los elementos de un circuito eléctrico.

65
una sola batería varias baterías Fuente de corriente directa Fuente de corriente alterna Lampara incandescente Resistencia Eléctrica (*) Reostato
Bobina Interruptor abierto Interruptor cerrado Condensadores
(*) Usualmente puede representar algún equipo, como una computadora, un equipo de Rx, un electrocardiógrafo, etc. LEY DE OHM. RESISTENCIA Y RESISTORES Para producir una corriente eléctrica en un circuito, se requiere una diferencia de potencial. Una batería constituye una forma para producir esa diferencia de potencial. Georg Simons Ohm (1987-1854), fue quien estableció experimentalmente que la corriente en un alambre metálico (I) es proporcional a la diferencia de potencial (V) aplicada en sus extremos.
I V Este hecho se conoce como Ley de Ohm. Por ejemplo, si conectamos un alambre a una batería de 6 voltios, el flujo de corriente sería el doble del que circularía, si el alambre se encontrara conectado a una batería de 3 V (No se recomienda realizar este experimento sin la adecuada supervisión). La cantidad exacta de corriente que circula en un alambre depende no solo del voltaje, sino también de la oposición que ofrece el alambre al flujo de electrones, puesto que los electrones son retardados debido a las interacciones con los átomos del alambre. Cuanto mayor sea la oposición o resistencia que ofrezca el alambre, menor será la corriente para un voltaje determinado. Por tanto, definimos la resistencia de manera que la corriente sea inversamente proporcional a ella. Cuando combinamos esto con la proporcional anterior tenemos:
+ -

66
R
VI
La ecuación anterior se escribe a menudo como
V = I R
Esta forma de relacionar la corriente y la diferencia de potencial establece una forma lineal; pero la naturaleza de los dispositivos orgánicos no les permite estar sujetos a una linealidad entre voltaje y corriente; sin embargo para facilitar la comprensión del fenómeno eléctrico, se utilizará la ecuación lineal de Ohm. Resistencia. Es una medida de la mayor o menor oposición que un conductor ofrece al paso de la corriente eléctrica. Los conductores metálicos tienen baja resistencia, los aisladores, tiene una resistencia muy alta. Resistores. Son dispositivos hechos a propósito para ofrecer resistencia a flujo de la corriente en un circuito, se fabrican con un valor determinado de resistencia y se utilizan para limitar o controlar la cantidad de corriente que fluye en un circuito. Hay ciertos resistores que utilizan la energía eléctrica para uso humano tales como: el filamento de una lampara produciendo luz; una plancha eléctrica produciendo calor; como también una cocina eléctrica, que están esencialmente formadas por un resistor.
El valor de la resistencia de un resistor se mide en Ohmios () donde 1 Ohmio = Voltio/ Amperio. Resistividad y Conductividad Resistividad. Se ha descubierto experimentalmente que la resistencia R de una alambre metálico es directamente proporcional a su longitud L es inversamente proporcional al área A de la sección transversal.
Esto es: R = (L/A)
donde la constante de proporcionalidad () se denomina resistividad y depende del material utilizando. Esta relación tiene sentido ya que un alambre grueso ofrece mayor área al paso de los electrones y la resistencia sería mayor si la longitud es mayor puesto que habría más obstáculo al flujo de electrones. Entonces, si quisiéramos una resistencia elevada debemos tener un alambre largo y delgado. Un alambre corto y más grueso tendrá una resistencia menor.
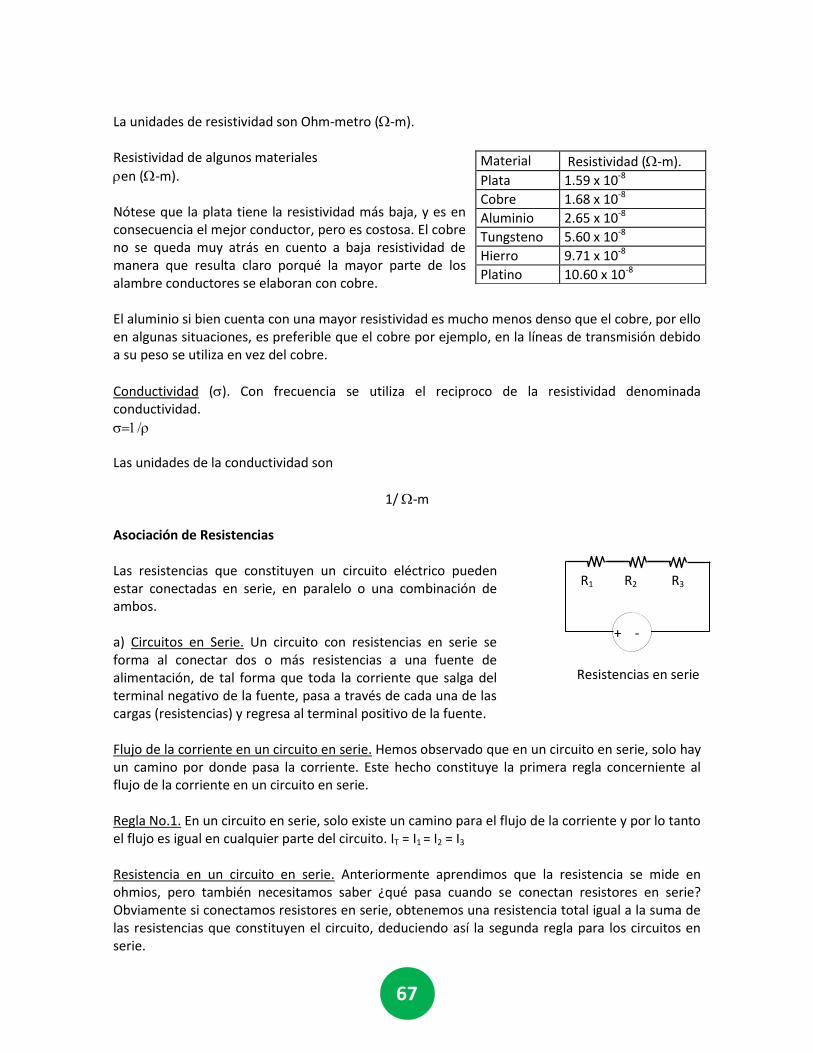
67
La unidades de resistividad son Ohm-metro (-m). Resistividad de algunos materiales
en (-m). Nótese que la plata tiene la resistividad más baja, y es en consecuencia el mejor conductor, pero es costosa. El cobre no se queda muy atrás en cuento a baja resistividad de manera que resulta claro porqué la mayor parte de los alambre conductores se elaboran con cobre. El aluminio si bien cuenta con una mayor resistividad es mucho menos denso que el cobre, por ello en algunas situaciones, es preferible que el cobre por ejemplo, en la líneas de transmisión debido a su peso se utiliza en vez del cobre.
Conductividad (). Con frecuencia se utiliza el reciproco de la resistividad denominada conductividad.
Las unidades de la conductividad son
1/ -m Asociación de Resistencias Las resistencias que constituyen un circuito eléctrico pueden estar conectadas en serie, en paralelo o una combinación de ambos. a) Circuitos en Serie. Un circuito con resistencias en serie se forma al conectar dos o más resistencias a una fuente de alimentación, de tal forma que toda la corriente que salga del terminal negativo de la fuente, pasa a través de cada una de las cargas (resistencias) y regresa al terminal positivo de la fuente. Flujo de la corriente en un circuito en serie. Hemos observado que en un circuito en serie, solo hay un camino por donde pasa la corriente. Este hecho constituye la primera regla concerniente al flujo de la corriente en un circuito en serie. Regla No.1. En un circuito en serie, solo existe un camino para el flujo de la corriente y por lo tanto el flujo es igual en cualquier parte del circuito. IT = I1 = I2 = I3 Resistencia en un circuito en serie. Anteriormente aprendimos que la resistencia se mide en ohmios, pero también necesitamos saber ¿qué pasa cuando se conectan resistores en serie? Obviamente si conectamos resistores en serie, obtenemos una resistencia total igual a la suma de las resistencias que constituyen el circuito, deduciendo así la segunda regla para los circuitos en serie.
Material Resistividad (-m).
Plata 1.59 x 10-8
Cobre 1.68 x 10-8
Aluminio 2.65 x 10-8
Tungsteno 5.60 x 10-8
Hierro 9.71 x 10-8
Platino 10.60 x 10-8
Resistencias en serie
R1 R2 R3
+ -

68
Regla No.2. Las resistencias conectadas en serie se suman y el resultado se denomina resistencia combinada o resistencia total.
RT = R1 + R2 + R3. Voltaje en un circuito en serie. Cuando la corriente fluye a través de un resistor se crea un voltaje entre sus dos extremos. Para medir este voltaje se puede utilizar la ley de ohm multiplicando la corriente por la resistencia para obtener el voltaje (V = IR) Cuando los resistores están conectados en serie, el voltaje creado entre los extremos de cada resistor se divide proporcionalmente de acuerdo al valor de cada uno de ellos. Esto significa que habrá mayor voltaje en los resistores de alto valor y menor voltaje en los resistores de bajo valor. Cada uno de estos voltajes en un circuito en serie (sin tomar en cuenta el voltaje de la fuente de alimentación) se denominan caídas de voltaje. La caída de voltaje a través de cada resistor se calcula multiplicando la corriente total por la resistencia de cada resistor. Si sumamos las caídas de voltaje de cada resistor obtenemos el voltaje de la fuente, lo cual es una expresión de la regla 3. Regla No.3. La suma de las caídas de voltaje en un circuito en serie es igual al voltaje de la fuente de alimentación. VT = V1 + V2 + V3 Comprobación de las caídas de voltaje. Para comprobar de cada uno de los resistores en el circuito, conectando un voltímetro entre los extremos de cada resistencia. También es posible comprobar el flujo de la corriente en el circuito. Para comprobar la corriente I, tenemos que abrir el circuito (desconectado uno de los alambres) e insertando un Amperímetro (medidor de corriente) en el circuito. Este medidor puede insertarse en cualquier punto del circuito. Polaridad en un circuito en serie. Los resistores y otras cargas no tienen problemas de polaridad. Esto quiere decir que estas partes pueden conectarse en un circuito, sin preocuparse de puntas positivas o negativas. Sin embargo, cuando fluye la corriente a través de estos componentes, se crea un voltaje y el lado por donde entra la corriente es negativo con respecto al lado de donde sale la corriente. Por lo tanto es necesario recordar este detalle al utilizar medidores, para medir la corriente y el voltaje, creando en los componentes de un circuito en serie. b) Circuitos en Paralelo. Cualquier circuito que tenga más de un camino para el flujo de la corriente, se denomina circuito en paralelo. Reglas de un circuito en paralelo. Consideraremos el circuito de la figura anterior Regla No.1. El voltaje creado en todas las resistencias conectadas en paralelo es el mismo en cualquiera de ellas. (En un circuito en paralelo sencillo, este voltaje equivale al voltaje de la fuente).
V = V1 = V2 = V3
R1
R2
R3 + -
Resistencias en Paralelo

69
Regla No.2. El total de la corriente equivale a la suma de la corriente del ramal 1, más la corriente del ramal 2, más la corriente del ramal 3, etc.
I = I1 + I2 + I3 La cantidad de la corriente del ramal depende de la resistencia que tenga y del voltaje creado en el circuito en paralelo. Puesto que todos los ramales tienen el mismo voltaje, cuanta más resistencia haya en un ramal, menor corriente circulara por él. Regla No.3. En un circuito en paralelo se tiene que, el inverso de la resistencia total del circuito es igual a la suma de los inversos de cada una de las resistencias que lo constituyen.
...1111
321 RRRR
Ejercicios:
1. La fuerza electrostática entre un electrón y un neutrón es:
a) Negativa de atracción. b) Positiva de repulsión. c) Cero. d) Algunas veces de atracción y otras de repulsión.
2. Dos cargas puntuales de la misma magnitud se atraen con una fuerza de 2.0 N cuando están separadas 4.0 mm. Cuando se acercan a 1.0 mm la fuerza es de:
a) Faltan datos b) 4.0 N c) 8.0 N d) 32 N e) 0.5 N
3. La unidad de carga en el Sistema Internacional (SI) es el: a) Julio. b) Amperio. c) Coulombio. d) Unidad electrostática (esu). e) Voltio.
4. El electrón tiene carga:
a) Positiva. b) Negativa. c) Neutra. d) Ninguna de las anteriores es correcta.
70
5. Un Coulombio son:
a) Infinitos. b) 6.28 X1023 electrones. c) 6.28 X1023 electrones. d) 6.23 X1018 electrones. e) 3.40X 1012 electrones
6. Cuando la separación de los centros de dos esferas cargadas se duplica, la fuerza eléctrica entre ellas:
a) Se reduce a la mitad b) Se duplica c) Se reduce a la cuarta parte d) Se cuadriplica e) Ninguna de las anteriores
7. Si la carga sobre cada una de dos esferas diminutas idénticas se duplica cuando su separación también se duplica, su fuerza de interacción
a) Se duplicará b) Se reducirá a la mitad c) Se reducirá a la cuarta parte d) Permanecerá inalterada e) Ninguna de las anteriores
8. Un electrón que está en un campo eléctrico de 100N/C experimenta una fuerza de
a) 1.6X10-10N b) 1.6X10-2N c) 3.2X10-17N d) 1.6X10-17N e) Ninguna de las anteriores
9. Los conductores eléctricos:
a) Permiten el movimiento libre de carga a través de ellos b) Están constituidos exclusivamente por electrones c) No pueden adquirir carga neta d) No pueden polarizarse e) Son materiales polares
10. Un campo eléctrico E de una carga puntual que se encuentra a 4.0m tiene un valor medio de 100N/C. el campo a 2.0m de la carga es:
a) 400N/C b) 50N/C c) 100N/C d) 800N/C e) Ninguna de las anteriores
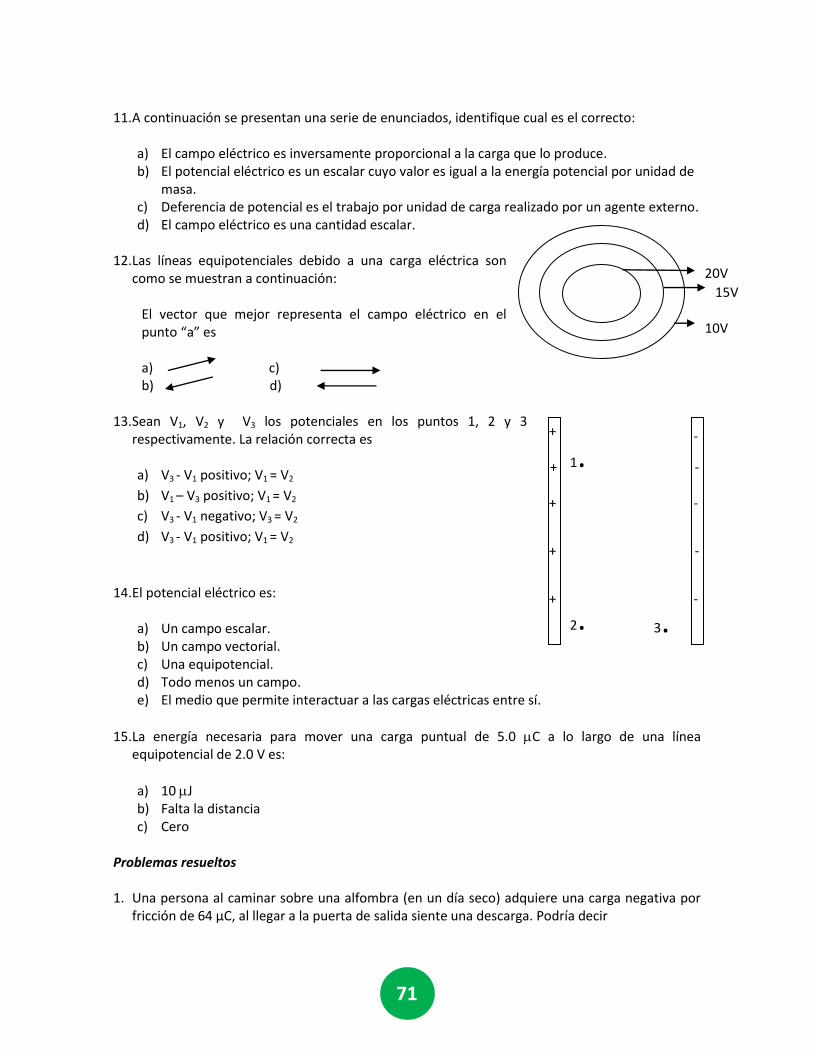
71
11. A continuación se presentan una serie de enunciados, identifique cual es el correcto:
a) El campo eléctrico es inversamente proporcional a la carga que lo produce. b) El potencial eléctrico es un escalar cuyo valor es igual a la energía potencial por unidad de
masa. c) Deferencia de potencial es el trabajo por unidad de carga realizado por un agente externo. d) El campo eléctrico es una cantidad escalar.
12. Las líneas equipotenciales debido a una carga eléctrica son
como se muestran a continuación:
El vector que mejor representa el campo eléctrico en el punto “a” es
a) c) b) d)
13. Sean V1, V2 y V3 los potenciales en los puntos 1, 2 y 3
respectivamente. La relación correcta es
a) V3 - V1 positivo; V1 = V2
b) V1 – V3 positivo; V1 = V2
c) V3 - V1 negativo; V3 = V2
d) V3 - V1 positivo; V1 = V2
14. El potencial eléctrico es:
a) Un campo escalar. b) Un campo vectorial. c) Una equipotencial. d) Todo menos un campo. e) El medio que permite interactuar a las cargas eléctricas entre sí.
15. La energía necesaria para mover una carga puntual de 5.0 C a lo largo de una línea equipotencial de 2.0 V es:
a) 10 J b) Falta la distancia c) Cero
Problemas resueltos 1. Una persona al caminar sobre una alfombra (en un día seco) adquiere una carga negativa por
fricción de 64 µC, al llegar a la puerta de salida siente una descarga. Podría decir
15V
10V
20V
a.
+ -
+
+
+
+
-
-
-
-
1.
2. 3.

72
¿Cuántos electrones pasaron de la alfombra a la persona y de la persona a la puerta? e (carga del electrón) = 1,6 X10-19C Como la persona adquiere una carga de 64μC el número de e que se transfirieron de la alfombra a la persona será:
N (Nº de electrones) = eXCX
CX
e
QT 14
19
6
104106.1
1064
Al tocar la puerta la persona se descarga y por conservación de la carga, la puerta debe haber adquirido una carga igual a la anterior.
2. Una carga punto q1 = +3X10 -6 C se coloca a 12 cm de una segunda carga punto q2 =-1,5X10-6 C
Calcular la magnitud dirección y sentido de la fuerza que obra sobre cada carga. Para calcular la magnitud utilizaremos la ley de Coulomb.
N
m
CXCXC
NmX
r
qkqF 8.2
12.0
105.1103109
2
66
2
29
2
21
Como los signos de las cargas son distintos la fuerza será de atracción y la dirección será la recta que une ambas cargas.
3. Un objeto pequeño que posee una carga de -4,0 nC experimenta una fuerza hacia abajo de
5,0X10-8 N cuando se la coloca en un lugar donde existe campo eléctrico. a) ¿Cuál es la magnitud y dirección del campo eléctrico en ese punto?, b) ¿Cuál sería la magnitud y la dirección de la fuerza que actuaría sobre un protón colocado en ese punto del campo eléctrico? qp = 1,6 X10-19 C
C
N
CX
NX
q
FE 5.12
104
1059
8
Hacia arriba
NXCXC
NEqF p
1819 100.2106.15.12
Hacia arriba
4. Determina la carga de una partícula puntual sometida a un potencial eléctrico de una carga de
127V situada 20cm. Solución. Sabemos que el potencial eléctrico de una partícula está determinado por:
Por lo que despejando tendremos:
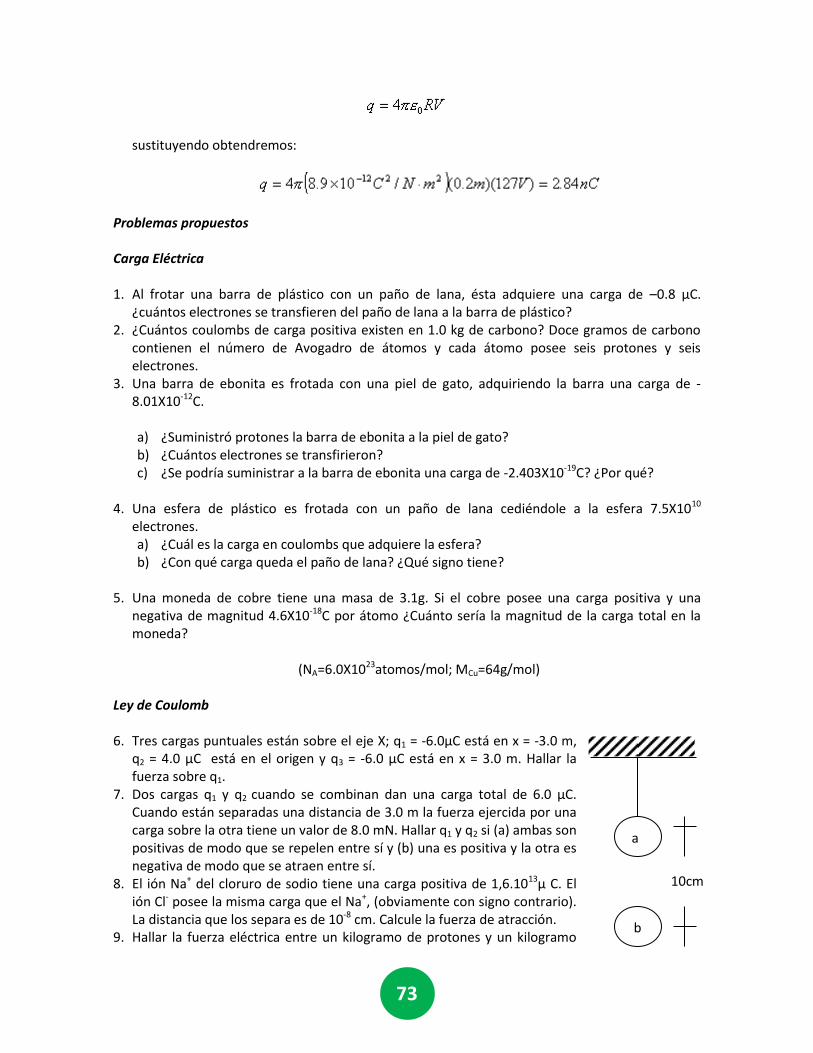
73
sustituyendo obtendremos:
Problemas propuestos Carga Eléctrica 1. Al frotar una barra de plástico con un paño de lana, ésta adquiere una carga de –0.8 µC.
¿cuántos electrones se transfieren del paño de lana a la barra de plástico? 2. ¿Cuántos coulombs de carga positiva existen en 1.0 kg de carbono? Doce gramos de carbono
contienen el número de Avogadro de átomos y cada átomo posee seis protones y seis electrones.
3. Una barra de ebonita es frotada con una piel de gato, adquiriendo la barra una carga de -8.01X10-12C.
a) ¿Suministró protones la barra de ebonita a la piel de gato? b) ¿Cuántos electrones se transfirieron? c) ¿Se podría suministrar a la barra de ebonita una carga de -2.403X10-19C? ¿Por qué?
4. Una esfera de plástico es frotada con un paño de lana cediéndole a la esfera 7.5X1010
electrones. a) ¿Cuál es la carga en coulombs que adquiere la esfera? b) ¿Con qué carga queda el paño de lana? ¿Qué signo tiene?
5. Una moneda de cobre tiene una masa de 3.1g. Si el cobre posee una carga positiva y una
negativa de magnitud 4.6X10-18C por átomo ¿Cuánto sería la magnitud de la carga total en la moneda?
(NA=6.0X1023atomos/mol; MCu=64g/mol)
Ley de Coulomb 6. Tres cargas puntuales están sobre el eje X; q1 = -6.0µC está en x = -3.0 m,
q2 = 4.0 µC está en el origen y q3 = -6.0 µC está en x = 3.0 m. Hallar la fuerza sobre q1.
7. Dos cargas q1 y q2 cuando se combinan dan una carga total de 6.0 µC. Cuando están separadas una distancia de 3.0 m la fuerza ejercida por una carga sobre la otra tiene un valor de 8.0 mN. Hallar q1 y q2 si (a) ambas son positivas de modo que se repelen entre sí y (b) una es positiva y la otra es negativa de modo que se atraen entre sí.
8. El ión Na+ del cloruro de sodio tiene una carga positiva de 1,6.1013μ C. El ión Cl- posee la misma carga que el Na+, (obviamente con signo contrario). La distancia que los separa es de 10-8 cm. Calcule la fuerza de atracción.
9. Hallar la fuerza eléctrica entre un kilogramo de protones y un kilogramo
10cm
b
a
74
de electrones separados por 106m 10. Una pequeña esfera “a” suspendida y cargada positivamente atrae a otra pequeña esfera “b”,
de masa 1Kg, colocada en la vertical que pasa por el punto de suspensión de la primera, a 10cm de ésta, como lo muestra la figura. Sabiendo que la carga de “b” es igual y opuesta a la de “a” y que b queda en equilibrio en el aire, determinar:
a) La carga de cada uno de los cuerpos. b) El número de electrones perdidos por el cuerpo al adquirir la carga.
11. La fuerza electrostática entre dos iones semejantes que se encuentran separados por una
distancia de 5 x 10-10 m es de 3,7 x 10-9 N. ¿Cuál es la carga de cada uno de los iones? ¿Cuántos electrones faltan en cada uno de los iones?
Campo eléctrico 12. Una carga puntual q1 = -6,0 nC está en el origen de coordenadas y una segunda carga puntual
q2 = 4,9 nC está sobre el eje x en x = 0,8 m. Encuentre el campo eléctrico en magnitud y dirección en cada uno de los puntos sobre el eje x: a) x = 0,2 m; b) x = 1,2 m y c) x = -0,2 m.
13. Calcular el módulo del campo eléctrico en un punto que está a 2 cm de una partícula de 1.0X10-
2 C. 14. Hallar el valor de una carga Q que produce un campo eléctrico de 20 N/C, en un punto ubicado
a 1 m de distancia. 15. Calcular el módulo del vector intensidad de un campo eléctrico en un punto a, sabiendo que en
el, sobre una carga explorada de 1X10-4 C aparece una fuerza de 0,2 N. 16. Calcular el campo eléctrico en el punto A de la figura.
17. ¿Cuál será la intensidad de un campo eléctrico creado por una carga de 5.10-8 C a 2 cm, 6 cm y 12 cm respectivamente de la misma?
Potencial eléctrico
18. Determine el potencial a 1.0cm de un protón y ¿cuál es la diferencia de potencial entre dos
puntos que están a 1.0 y 2.0m del protón? 19. A una distancia r de una carga puntual q, el potencial eléctrico es V = 400 V y la magnitud del
campo eléctrico es E= 150 N/C. Determine los valores de q y r? 20. ¿A qué distancia desde una carga puntual de 8 μC el potencial eléctrico es igual a 3,6 x 104 V?
75
REFERENCIAS DOCUMENTALES
Título: Física con ordenador. Curso interactivo de física en Internet Enlace: http://goo.gl/s8qnvK; http://goo.gl/VKQ84I Resumen: Curso de Física general que trata desde conceptos simples como el movimiento rectilíneo hasta otros más complejos como las bandas de energía de los sólidos. La interactividad se logra mediante los 545 applets insertados en sus páginas webs que son simulaciones de sistemas físicos, prácticas de laboratorio, experiencias de gran relevancia histórica, problemas interactivos, problemas-juego, etc. Título: Jugando y aprendiendo. Máquinas y mecanismos Enlace: http://goo.gl/Tu6fPB Título: Jugando y aprendiendo. Electricidad y magnetismo Enlace: http://goo.gl/hRJHyo Resumen: Blog con recursos para Educación Básica creado por Luisa María Arias Parada. Ofrece recursos que puedan ser de utilidad para reforzar las tareas de clase y además, hacer de este espacio un lugar de encuentro donde poder participar con comentarios para llegar al mundo del conocimiento. Título: Leyes de Newton Enlace: http://goo.gl/fhbjxQ Resumen: Las Leyes de Newton, también conocidas como Leyes del movimiento de Newton, son tres principios a partir de los cuales se explican la mayor parte de los problemas planteados por la dinámica, en particular, aquellos relativos al movimiento de los cuerpos. La actividad propone a los alumnos estudiar las tres Leyes de Newton y sus aplicaciones en problemas cotidianos. Título: Forces and motion Enlace: http://goo.gl/nPJJ7V Resumen: Página interactiva para resolución de problemas de fuerza y movimiento. Título: Tecnoedu Enlace: http://goo.gl/xq6Oed Resumen: Presenta a la comunidad de docentes de Física de nivel medio guías gratuitas de construcción y uso en aula de un conjunto de bajo costo y construcción de tipo artesanal, con el que poder abordar electrostática, circuitos eléctricos, efectos magnéticos de las corrientes eléctricas, magnetismo, ferromagnetismo, inducción y sus aplicaciones tecnológicas. Los trabajos están organizados en módulos, que ofrecen una, dos o más propuestas experimentales, y van acompañados de una referencia teórica y un cuestionario para proponer a la clase, con el objeto de orientar a los estudiantes hacia las conclusiones que cada experimento persigue.