cubierta delantera f y q:portadafyq.qxd - nocturno giner · sin embargo, el gran avance en el...
TRANSCRIPT

38
UNIDAD
Cinemática2
a Cinemática es la parte de la Mecánica que tiene por objeto el estudio de los movimientos
de los cuerpos, sin tener en cuenta las causas que los producen.
Desde la más remota antigüedad los seres humanos han tenido curiosidad por el movimiento,
tanto de los astros como de otros objetos que se mueven a nuestro alrededor.
Ya en el antiguo Egipto se llegó a conocer la distancia existente entre la Tierra y el Sol. Ptolomeo,
en el siglo II, estableció el sistema geocéntrico según el cual la Tierra era el centro del Universo y los
demás planetas, el Sol y la Luna giraban en torno a ella, modelo que se mantuvo hasta el siglo XVI en
el que Copérnico descubrió el sistema heliocéntrico según el cual el Sol está en el centro del Sistema
Solar y todos los demás planetas giran alrededor de él.
Fueron Galileo (finales del siglo XVI) y Kepler (principios del siglo XVII) quienes pudieron demostrar
la validez de este sistema al expresar en forma matemática las leyes que rigen los movimientos de
estos astros y que siguen siendo válidas en la actualidad.
Sin embargo, el gran avance en el estudio de los movimientos de los cuerpos y de las causas
que los producen fue debido a Newton. Este científico, estableció a finales del siglo XVII los principios
de la Mecánica y la Ley de la Gravitación Universal que rige los movimientos de los cuerpos celestes
y muchos de los que ocurren a nuestro alrededor, como la caída de objetos por efecto de la atracción
que la Tierra ejerce sobre ellos.
Vamos a comenzar esta Unidad con el estudio de los sistemas de referencia, necesarios para poder
expresar matemáticamente los elementos principales de cualquier movimiento.
En función de estos elementos (posición, desplazamiento, trayectoria, velocidad y aceleración)
veremos que puede existir un gran número de movimientos diferentes y unas ecuaciones matemáticas
por las que se rigen.
Por último, estudiaremos con detalle algunos de estos movimientos, tras lo cual comprenderemos
muchos de los fenómenos que ocurren a nuestro alrededor y que hasta el momento nos habían
pasado desapercibidos.
Los objetivos que pretendemos alcanzar en esta Unidad son los siguientes:
1. Valorar la importancia de los sistemas de referencia en la resolución de problemas relacionados
con el movimiento.
2. Conocer los elementos fundamentales del movimiento.
3. Analizar los diferentes tipos de movimiento y realizar representaciones gráficas.
4. Resolver problemas sobre movimientos rectilíneos y circulares.
5. Explicar la superposición de movimientos, particularmente en el tiro horizontal y en el tiro
oblicuo.
L

39
LA CINEMÁTICA
EL MOVIMIENTO
SISTEMA DE
REFERENCIA
estudia
en el que se
localiza una
POSICIÓN
en un
al variar se
produce un
DESPLAZAMIENTO
según una
TRAYECTORIA
con una
VELOCIDAD
si varía,
existe
ACELERACIÓN
RECTILÍNEA
(movimiento rectilíneo)
CURVILÍNEA
(movimiento curvilíneo)
CONSTANTE
(movimiento uniforme)
VARIABLE
(movimiento variado)
TANGENCIAL NORMAL
(perpendicular a
la velocidad)
VARIABLE
(movimiento
armónico y otros)
CONSTANTE
(movimiento
uniformemente
acelerado)
módulo = V
2
/ R
sentido hacia el centro de
curvatura de la trayectoria.
(movimientos curvilíneos)
que puede sermódulo y sentido cumplen
(la misma dirección
que la velocidad)
1. SISTEMAS DE REFERENCIA. ELEMENTOS DEL MOVIMIENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401.1. Vector de posición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.2. Desplazamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.3. Trayectoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.4. Velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.5. Aceleración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2. MOVIMIENTO RECTILÍNEO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.1. Movimiento rectilíneo uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.2. Movimiento rectilíneo uniformemente acelerado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3. MOVIMIENTO CIRCULAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.1. Movimiento circular uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2. Movimiento circular uniformemente acelerado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4. COMPOSICIÓN DE MOVIMIENTOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.1. Lanzamiento horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2. Lanzamiento inclinado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Í N D I C E D E C O N T E N I D O S

40
1. Sistemas de referencia. Elementos delmovimiento
Todos tenemos una idea bastante clara de lo que es el movimiento: el cambio de posición o
lugar que ocupa un cuerpo en el espacio. Esto es cierto pero... ¿como conocemos y, más aún,
expresamos la posición de un cuerpo?; ¿está lejos o cerca? Inmediatamente surge otra pregunta:
lejos o cerca... ¿de dónde?, ¿en qué dirección? Es aquí donde aparece la necesidad de establecer
un sistema de referencia que nos permita conocer y expresar matemáticamente la posición de
un punto en el espacio.
Cualquier sistema de referencia va ligado a un punto, que se toma como origen, y a tres
direcciones que representan las dimensiones del espacio. La representación matemática más
habitual de un sistema de referencia se fundamenta en los ejes cartesianos. La posición de un
punto se expresa por sus coordenadas (x, y, z) que son las medidas obtenidas al proyectar el
punto sobre cada uno de los ejes.
Como es evidente, se pueden establecer infinitos sistemas de referencia. La posición de un
punto y, por tanto, el movimiento siempre serán relativos al sistema de referencia elegido.
Un sistema de referencia puede estar moviéndose con respecto a otro. Si su velocidad es
constante (no existe aceleración) decimos que se trata de un sistema de referencia inercialen caso contrario el sistema es no inercial.
Imaginemos que viajamos en un barco y fijamos el sistema de referencia en el puerto de partida;
este sistema sería adecuado para estudiar el movimiento del barco, pero si queremos estudiar el
movimiento de un pasajero que pasea por la cubierta convendría establecer un sistema con origen
en el propio barco. En estas condi- ciones, si el barco se mueve en línea recta y a velocidad
constante, el sistema cuyo origen está en un punto del barco es inercial respecto al sistema
con origen en el puerto y si el barco está acelerando, frenando o cambiando de rumbo, es no
inercial.
En la resolución de problemas es muy importante elegir sistemas de referencia inerciales,
siempre que sea posible, para evitar efectos indeseados debidos a la aceleración propia del
sistema.
P(x,y,z)
x
y Y
Z
X
z
Fígura 1: Sistema de coordenadas
CINEMÁTICA
2UNIDAD

41
Cuando establecemos un sistema de referencia conviene situar su origen y seleccionar las
direcciones de modo que se favorezca la resolución del problema que intentamos resolver. Si
además podemos eliminar una dirección porque no afecta al problema, éste se simplifica a dos
dimensiones, es decir a un plano o incluso a una recta en el caso de que las variables dependan
de una sola dimensión.
1.1. Vector de posiciónHemos visto que la posición de un punto se expresa por sus coordenadas cartesianas pero
también podemos expresarla por su vector de posición que es el que va desde el origen de
coordenadas hasta el punto cuya posición queremos expresar.
Si conocemos las coordenadas del punto (x, y, z), el vector de posición viene dado por la
expresión: , donde son los vectores unitarios correspondientes a los ejes
X, Y, Z.
1.2. DesplazamientoCuando un punto se mueve desde una posición hasta otra ha realizado un desplazamiento
que podemos representar por un vector que va desde la posición inicial del móvil hasta la posición
final y que matemáticamente expresamos por el vector desplazamiento que es la diferencia entre
los vectores de posición y cuyo valor viene dado por la expresión:
Expresado en función de sus componentes, quedará:
Δr r r rr x x i y y j z z k= −( ) + −( ) + −( )
1 0 1 0 1 0
Δr r rr r r= −
1 0
rr1
rr0
rr1
i j y
r
x
Y
Z
X
z
k
Fígura 2: Vector de posición
v r ri j k, ,
r r r rr xi yj zk= + +
42
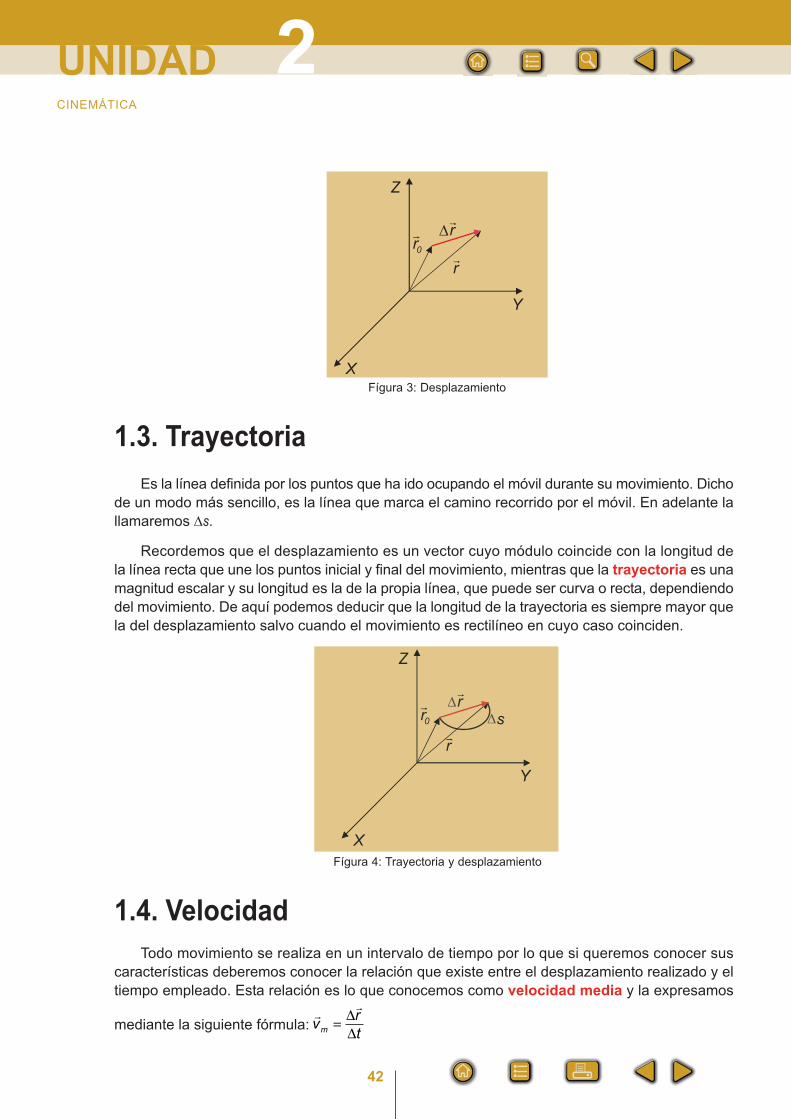
1.3. Trayectoria
Es la línea definida por los puntos que ha ido ocupando el móvil durante su movimiento. Dicho
de un modo más sencillo, es la línea que marca el camino recorrido por el móvil. En adelante la
llamaremos Δs.
Recordemos que el desplazamiento es un vector cuyo módulo coincide con la longitud de
la línea recta que une los puntos inicial y final del movimiento, mientras que la trayectoria es una
magnitud escalar y su longitud es la de la propia línea, que puede ser curva o recta, dependiendo
del movimiento. De aquí podemos deducir que la longitud de la trayectoria es siempre mayor que
la del desplazamiento salvo cuando el movimiento es rectilíneo en cuyo caso coinciden.
1.4. VelocidadTodo movimiento se realiza en un intervalo de tiempo por lo que si queremos conocer sus
características deberemos conocer la relación que existe entre el desplazamiento realizado y el
tiempo empleado. Esta relación es lo que conocemos como velocidad media y la expresamos
mediante la siguiente fórmula:
rΔ0r
Y
Z
X
r
Fígura 3: Desplazamiento
rr
v rtm = Δ
Δ
r
sr
0r
Y
Z
X
ΔΔ
Fígura 4: Trayectoria y desplazamiento
CINEMÁTICA
2UNIDAD

43
La unidad en el Sistema Internacional es el metro/segundo (m/s) o (ms-1).
Si expresamos el vector velocidad en función de sus componentes tendremos:
Con frecuencia, para expresar la rapidez con que se ha realizado un movimiento, es conveniente
referirse a la velocidad media a lo largo de la trayectoria, que es una magnitud escalar, cuyo
valor es el cociente entre la longitud de ésta y el tiempo empleado en recorrerla:
La velocidad también puede variar. Si queremos conocer su valor en un instante determinado
o velocidad instantánea hemos de adaptar la expresión de la velocidad media a un tiempo
infinitesimal, y lo expresamos así:
Como se estudiará en matemáticas a lo largo de este curso, esta expresión representa la
derivada del vector de posición con respecto al tiempo y se expresa:
En función de sus componentes: , o más resumidamente:
v stm = Δ
Δ
r r r rv
x xt t
iy yt t
jz zt t
km =−−
+−−
+−−
1 0
0
1 0
0
1 0
0
r r r rv v i v j v kx y z= + +
r r r rv dx
dti dy
dtj dz
dtk= + +
rr
v drdt
=
rr
v rtt
=→
lim
Δ
ΔΔ0
1. Un cazador se encuentra en el origen de coordenadas del sistema que hemos elegido como
referencia. Su perro, que se encuentra 20 metros al Norte de él, comienza a seguir un rastro y
se mueve 40 metros hacia el Este durante 20 segundos, a continuación permanece parado 5
segundos y después se mueve 30 metros hacia el Sur en lo que tarda 10 segundos.
a) Representar sobre unos ejes N--S (eje y) y E--O (eje x) la trayectoria seguida por el animal,
el vector de posición del punto donde se encuentra el perro al principio y al final de su
recorrido, y el vector desplazamiento.
b) Expresar los vectores de posición ( y ) y el vector desplazamiento ( ) en función de
sus componentes.
c) Hallar el vector velocidad media y su módulo.
d) La velocidad media a lo largo de la trayectoria.
Δrr
rr
rr0
A c t i v i d a d e s

44
CINEMÁTICA
2UNIDAD
Avance matemático
Es probable que no hayas estudiado aún en Matemáticas como se obtiene la función derivada de
otra. Aunque lo estudiarás en este curso, es conveniente dar aquí un somero avance que será necesario
para resolver las actividades que se proponen a continuación.
La derivada de una función es otra función que se obtiene aplicando unas reglas que, en general,
son sencillas. Concretamente vamos a obtener la derivada de una función polinómica que tenga el
tiempo (t) como variable independiente. Es lo que por ahora necesitamos y para ello basta con saber
que:
• La derivada de una suma de monomios es la suma de las derivadas de éstos;
• la derivada de una constante es cero;
• y que
Ejemplo: Vamos a obtener la derivada con respecto al tiempo de la función
La solución, según las reglas anteriores será:
dydt
t t t= ⋅ + ⋅ − = +2 3 1 5 0 6 5
1 0
y t t= + −3 5 3
2
ddt
at natn n( ) = −1
1. Las coordenadas de un punto que se mueve en el plano X -- Y vienen dadas por x = 5 t;y = 3 t 2
+ 2 en unidades del S.I. Hallar:
a) El vector de posición. b) El vector velocidad. c) El módulo de la velocidad.
Solución:
a)
b)
c)
2. La posición de un punto material que se mueve en el eje X viene dada, en función del tiempo,
por la ecuación en unidades del S.I. Calcular:
a) La expresión de la velocidad en función del tiempo.
b) El módulo de la velocidad a los 4 segundos de iniciarse el movimiento.
c) El desplazamiento realizado durante estos 4 segundos.
Solución:
a) Sabemos que v es la derivada de s con respecto al tiempo:
b) Sustituimos t = 4 en la ecuación de la velocidad y obtenemos: v = 8 ·4 - 3 = 29 ms -1
c) Calculamos la posición del punto para t = 0 s y para t = 4 s. La diferencia entre la posición
final e inicial nos dará el desplazamiento.
x0
= 5 m; x4
= 4 · 4
2
- 3 · 4 + 5 Δx = x4
- x0
= 57 - 5 = 52 m
v dxdt
t= = −8 3
x t t= − +4 3 5
2
rv v v t msx y= + = + −2 2 2 1
25 36
rr r r r r
v drdt
ddt
ti t j i tj= = + +( )( ) = +5 3 2 5 6
2
r r r r r rr xi yj ti t j= + = + +5 3 2
2
( )
E j e m p l o s

45
1.5. AceleraciónPara saber como varía la velocidad hemos de calcular la relación existente entre el incremento
de velocidad y el tiempo empleado. Esta relación es lo que conocemos como aceleración media
y la expresamos mediante la siguiente ecuación:
La aceleración también puede variar. Para conocer su valor en un instante determinado o
aceleración instantánea hemos de adaptar la expresión anterior a un tiempo infinitesimal, y lo
expresamos así: , que, como acabamos de ver, representa la derivada del vector
velocidad con respecto al tiempo:
Componentes cartesianas de la aceleración
Cualquier vector se puede expresar en función de sus componentes:
o resumidamente: , donde ax, ay, az son las
componentes cartesianas de la aceleración, cuyos valores son:
a dvdtx
x= advdty
y= a dvdtz
z=
� � � �a dv
dti
dvdt
j dvdt
kx y z= + + � � � �a a i a j a kx y z= + +
� �a dv
dt=
� �a v
tt=
→lim
∆
∆∆0
� �a v
tm = ∆∆
La posición de un punto material que se mueve en el espacio viene dada por el vector
Hallar:
a) La distancia, en metros, existente entre el punto móvil y el origen de coordenadas a los 5
segundos de iniciarse el movimiento.
� � � �r t i t j t k= −( ) + +( ) +5 2 2 1 4
2 3
E j e m p l o
2. Un avión se dispone a aterrizar en un aeropuerto y se encuentra en un punto de coordenadas
(500, 300, 400), respecto al sistema de referencia con origen en la torre de control y alcanza la
pista a los 10 segundos, en un punto de coordenadas (100, 200, - 50). Hallar:
a) El vector de posición en el punto inicial y en el que alcanza a la pista.
b) El vector desplazamiento y su módulo.
c) La velocidad media durante esta maniobra y su módulo.
A c t i v i d a d e s

46
Componentes intrínsecas de la aceleración
Si elegimos un sistema de referencia con origen en el propio móvil, un eje en la misma dirección
que el vector velocidad y el otro perpendicular a ésta, es fácil hallar las componentes de la
aceleración en estos ejes. Una es tangencial (en la misma dirección que la velocidad) y la otra
normal (perpendicular). Éstas son precisamente las componentes intrínsecas de la aceleración
y en función de ellas, podemos expresar:
ta v
na
a
Fígura 5: Componentes intrinsicas de la aceleración
r r ra a at n= +
CINEMÁTICA
2UNIDAD
b) Las componentes cartesianas de la velocidad y el vector velocidad.
c) Las componentes cartesianas de la aceleración, el vector aceleración y su módulo a los 5
segundos.
Solución:
a) La distancia pedida es precisamente el módulo del vector de posición. En primer lugar
hallamos el vector de posición a los 5 segundos:
su módulo vale:
b) Las componentes de la velocidad vienen dadas por las derivadas de las componentes del
vector de posición:
; ;
El vector velocidad será:
c) Obtenemos las componentes cartesianas de la aceleración derivando las componentes
de la velocidad:
; ;
El vector aceleración será:
Y su módulo a los 5 segundos:
ra ms= + ⋅( ) = −
10 24 5 120 42
2 2 2
,
r r ra i tk= +10 24
a dvdt
ddt
t tzz= = =12 24
2advdt
ddty
y= = =2 0a dvdt
ddt
txx= = =10 10
r r r rv ti j t k= + +10 2 12
2
v dzdt
ddt
t t tz = = = ⋅ =4 4 3 12
3 2 2v dydt
ddt
ty = = +( ) =2 1 2v dxdt
ddt
t t tx = = −( ) = ⋅ =5 2 5 2 10
2
rr m= + + =123 11 500 515 02
2 2 2
,
r r r rr i j k= + +123 11 500
47
La aceleración tangencial nos da la medida de la variación del módulo del vector velocidad
o la variación de la rapidez del movimiento.
La aceleración normal nos da la medida del cambio de dirección de la velocidad y su valor,
como se demostrará más adelante, cuando estudiemos el movimiento circular, es siempre:
donde v es el módulo de la velocidad y r el radio de curvatura de la trayectoria en el punto donde
se encuentra el móvil.
2. Movimiento rectilíneoEn nuestra vida diaria observamos muchos movimientos; entre todos ellos, el más sencillo
es el de un móvil cuya trayectoria es una línea recta.
Si este movimiento se realiza a velocidad constante se trata de un movimiento rectilíneouniforme y si su velocidad varía con una aceleración constante, es un movimiento rectilíneouniformemente acelerado.
a vrn =2
3. Un automóvil entra en una curva cuyo radio de curvatura es de 200 m a una velocidad de
72 km/h y acelera durante 5 s con lo que alcanza una velocidad de 90 km/h. Hallar:
a) La aceleración tangencial.
b) La aceleración normal al comenzar a tomar la curva.
c) La aceleración total en ese momento.
A c t i v i d a d e s
o b ` r b o a^
T Todo movimiento se estudia en un sistema de referencia.
T La posición de un punto se expresa por sus coordenadas o por su vector de posición.
T El desplazamiento es un vector que va desde la posición inicial del móvil hasta la posición
final.
T La trayectoria es la línea definida por los puntos que ha ido ocupando el móvil a lo largo de su
recorrido.
T La velocidad puede ser media o instantánea. Igual ocurre con la aceleración.
T Las componentes intrínsecas de la aceleración son la aceleración tangencial y la aceleración
normal.

48
En cualquiera de los dos casos, la longitud del desplazamiento y la de la trayectoria coinciden
con el espacio recorrido y el movimiento se realiza en una sola dirección por lo que no es necesario
recurrir al cálculo vectorial y será indiferente hablar de desplazamiento o de trayectoria, siempre
y cuando tengamos en cuenta el sentido del movimiento, dentro de la dirección en que se realiza
ya que la trayectoria es sencillamente una longitud y no indica por sí misma el sentido.
2.1. Movimiento rectilíneo uniforme
Una vez que conocemos la equivalencia entre el desplazamiento y la trayectoria en este tipo
de movimiento, el valor de la velocidad media vendrá dado por el cociente entre el espacio recorrido
y el tiempo empleado:
Dado que la velocidad no varía, la aceleración es nula y también es evidente que la velocidad
media y la instantánea son iguales.
Para obtener la longitud de la trayectoria o el espacio recorrido despejamos s en la fórmula
anterior y obtenemos: s = s0 + v(t - t0)
Si suponemos que comenzamos a contar el tiempo cuando se inicia el movimiento tendremos
que t0 = 0 por lo que s = s0 + vt, donde s0 es el espacio inicial o la distancia desde el origen hasta
el punto donde se encontraba el móvil al comenzar el movimiento.
Si representamos en una gráfica la velocidad en función del tiempo, obtenemos una recta
paralela al eje de tiempos ya que la velocidad es constante. Podemos observar que el espacio
recorrido coincide con el valor de la superficie del rectángulo formado por la gráfica y el eje de
abcisas en el intervalo de tiempo considerado s = v(t - t0)
También podemos representar el espacio en función del tiempo y obtenemos una recta cuya
ordenada en el origen es el valor del espacio inicial s0
y su pendiente coincide con el valor de la
velocidad.
v(ms -1)
t(s)t0 t
)( 0ttvs -=
v
Fígura 6: Gráfica v- t en el movimiento rectilíneo uniforme
v st
s st t
= =−−
ΔΔ
0
0
CINEMÁTICA
2UNIDAD
49
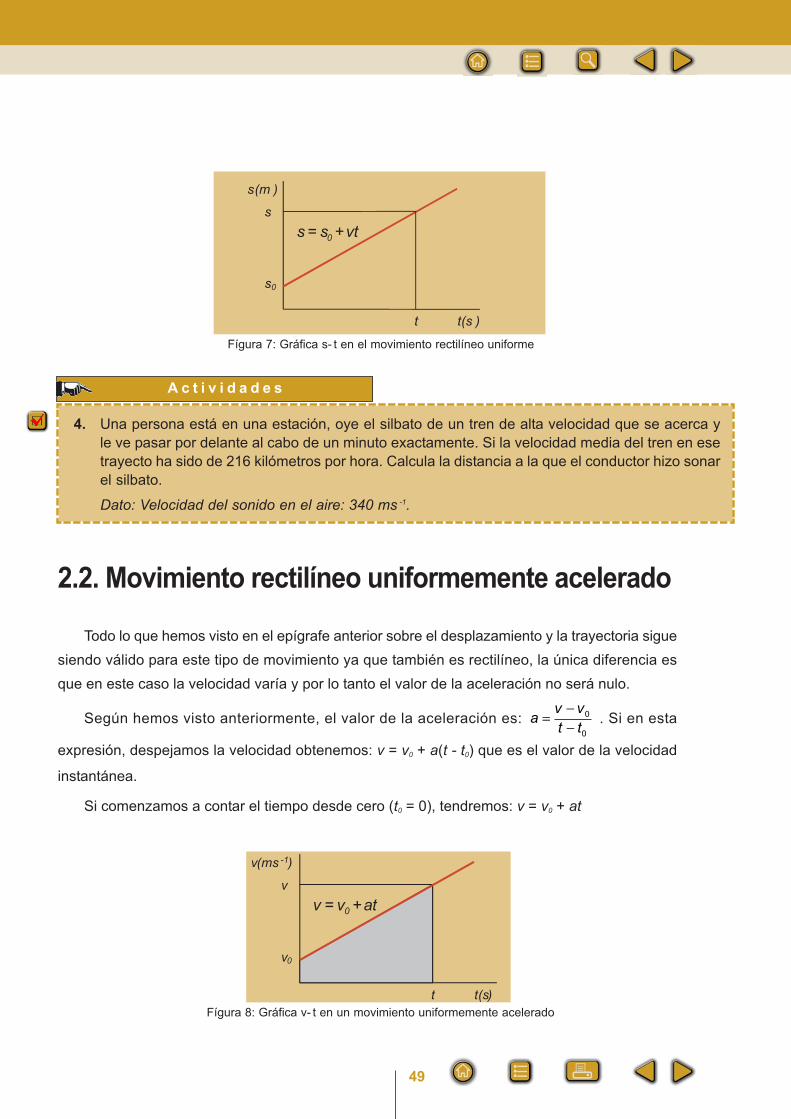
2.2. Movimiento rectilíneo uniformemente acelerado
Todo lo que hemos visto en el epígrafe anterior sobre el desplazamiento y la trayectoria sigue
siendo válido para este tipo de movimiento ya que también es rectilíneo, la única diferencia es
que en este caso la velocidad varía y por lo tanto el valor de la aceleración no será nulo.
Según hemos visto anteriormente, el valor de la aceleración es: . Si en esta
expresión, despejamos la velocidad obtenemos: v = v0 + a(t - t0) que es el valor de la velocidad
instantánea.
Si comenzamos a contar el tiempo desde cero (t0 = 0), tendremos: v = v0 + at
atvv += 0
v(ms -1)
t(s)t
v0
v
Fígura 8: Gráfica v- t en un movimiento uniformemente acelerado
s(m )
t(s )t
s0
svtss += 0
Fígura 7: Gráfica s- t en el movimiento rectilíneo uniforme
av vt t
=−−
0
0
4. Una persona está en una estación, oye el silbato de un tren de alta velocidad que se acerca y
le ve pasar por delante al cabo de un minuto exactamente. Si la velocidad media del tren en ese
trayecto ha sido de 216 kilómetros por hora. Calcula la distancia a la que el conductor hizo sonar
el silbato.
Dato: Velocidad del sonido en el aire: 340 ms -1.
A c t i v i d a d e s
50
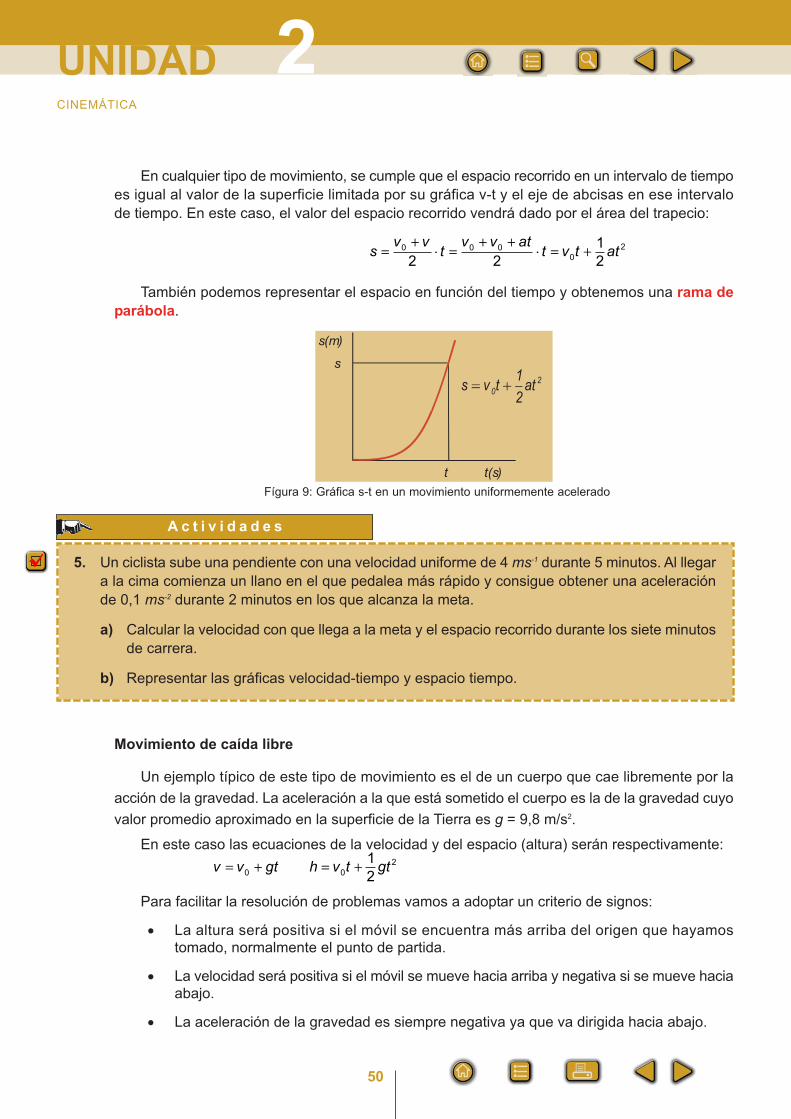
En cualquier tipo de movimiento, se cumple que el espacio recorrido en un intervalo de tiempo
es igual al valor de la superficie limitada por su gráfica v-t y el eje de abcisas en ese intervalo
de tiempo. En este caso, el valor del espacio recorrido vendrá dado por el área del trapecio:
También podemos representar el espacio en función del tiempo y obtenemos una rama deparábola.
Movimiento de caída libre
Un ejemplo típico de este tipo de movimiento es el de un cuerpo que cae libremente por la
acción de la gravedad. La aceleración a la que está sometido el cuerpo es la de la gravedad cuyo
valor promedio aproximado en la superficie de la Tierra es g = 9,8 m/s
2
.
En este caso las ecuaciones de la velocidad y del espacio (altura) serán respectivamente:
Para facilitar la resolución de problemas vamos a adoptar un criterio de signos:
• La altura será positiva si el móvil se encuentra más arriba del origen que hayamos
tomado, normalmente el punto de partida.
• La velocidad será positiva si el móvil se mueve hacia arriba y negativa si se mueve hacia
abajo.
• La aceleración de la gravedad es siempre negativa ya que va dirigida hacia abajo.
v v gt= +0
h v t gt= +0
2
1
2
20 2
1attvs +=
s(m)
t(s)t
s
Fígura 9: Gráfica s-t en un movimiento uniformemente acelerado
sv v
tv v at
t v t at=+
⋅ =+ +
⋅ = +0 0 0
0
2
2 2
1
2
CINEMÁTICA
2UNIDAD
5. Un ciclista sube una pendiente con una velocidad uniforme de 4 ms-1durante 5 minutos. Al llegar
a la cima comienza un llano en el que pedalea más rápido y consigue obtener una aceleración
de 0,1 ms-2durante 2 minutos en los que alcanza la meta.
a) Calcular la velocidad con que llega a la meta y el espacio recorrido durante los siete minutos
de carrera.
b) Representar las gráficas velocidad-tiempo y espacio tiempo.
A c t i v i d a d e s

51
Se lanza verticalmente hacia arriba un objeto con una velocidad inicial de 30 ms-1. Calcular:
a) El tiempo que tarda en alcanzar el punto más alto de su trayectoria.
b) La altura máxima que alcanza.
c) La velocidad a los cuatro segundos de haber sido lanzado.
d) Altura a la que se encuentra a los cuatro segundos.
Solución:
a) El móvil alcanzará el punto más alto cuando su velocidad sea igual a cero.
0 = v0 + gt; sustituyendo: 0 = 30 - 9,8t y despejando:
b) La altura máxima será la que tenga a los 3,06 s calculados en el apartado anterior.
c) Sustituimos en v = v0 + gt = 30 - 9,8 · 4 = - 9,2 ms -1
Observamos que la velocidad es negativa, como era de esperar, ya que a los 3,06 segun-
dos el objeto alcanzó su punto más alto, por lo que a los cuatro segundos está descendien-
do.
d) Sustituimos en h v t gt m= + = ⋅ − ⋅ =
0
2 2
1
2
30 4
1
2
9 8 4 41 6, ,
h v t gt m= + = ⋅ − ⋅ =0
2 2
1
2
30 3 06
1
2
9 8 3 06 45 92, , , ,
t s= =30
9 8
3 06
,
,
E j e m p l oE j e m p l o
6. Demostrar que un cuerpo abandonado libremente en un punto cercano a la superficie terrestre a
una altura h llega al suelo con una velocidad
7. Se lanza verticalmente hacia arriba un objeto con una velocidad inicial de 50 ms
-1
. Tres segundos
más tarde se lanza otro con una velocidad de 40 ms
-1
. Calcular:
a) El tiempo que tardan en encontrarse.
b) La velocidad de ambos objetos en ese instante.
c) La altura a la que se encuentran.
v gh= 2 .
A c t i v i d a d e s
o b ` r b o a^
T En el movimiento rectilíneo, la longitud de la trayectoria coincide con el módulo del vector des-
plazamiento.
T El espacio recorrido en un intervalo de tiempo es igual al valor de la superficie limitada por su
gráfica v - t y el eje de abcisas en ese intervalo.
T El movimiento de caída libre es rectilíneo uniformemente acelerado y su aceleración es la de
la gravedad.

52
3. Movimiento circularDiariamente vemos objetos o mecanismos que giran alrededor de un eje fijo, como una rueda,
un disco, un tiovivo... Si nos fijamos en un punto cualquiera, diferente del centro, de un objeto que
da vueltas, y nos imaginamos su trayectoria, llegamos a la conclusión de que es una circunferencia.
Pues bien, esto es precisamente lo que caracteriza a cualquier movimiento circular: su trayectoria
es una circunferencia.
3.1. Movimiento circular uniforme
Es el que realiza un móvil que recorre arcos de circunferencia iguales en tiempos iguales.
También podríamos definir este movimiento como el de un móvil que describe ángulos iguales
en tiempos iguales.
Esta segunda definición nos permite estudiar este movimiento en función del ángulo descrito
(ϕ ) en lugar del desplazamiento realizado. Para ello introducimos el concepto de velocidadangular (ω) que es el ángulo descrito en la unidad de tiempo, o dicho de otra forma: es el cociente
entre el ángulo descrito y el tiempo empleado. Es decir: ; si tomamos t0 = 0, tenemos que
Si en la fórmula anterior despejamos ϕ obtenemos el valor del ángulo descrito:
Las unidades en que se expresa ω son radianes por segundo (rad/s).
En la industria es muy frecuente expresar la velocidad angular en revoluciones por minuto
(rpm);
Ahora vamos a conocer dos magnitudes muy sencillas que nos ayudarán a comprender mejor
el movimiento circular: el periodo y la frecuencia:
El periodo (T ) es el tiempo que tarda el móvil en dar una vuelta completa, es decir, el tiempo
que tarda en describir un ángulo de 2π radianes.
La frecuencia es el número de vueltas que da en la unidad de tiempo (un segundo). Su unidad
en el SI es el hercio (Hz) que equivale a una vuelta por segundo.
El periodo y la frecuencia son magnitudes inversas: o bien
Sabiendo esto, podemos calcular la velocidad angular que ha mantenido el móvil en una vuelta
completa ya que conocemos el ángulo descrito (2π radianes) y el tiempo empleado que es el valor
ωϕ ϕ
=−
0
t
ω ϕ= Δt
ϕ ϕ ω= +0
t
Tf
= 1 fT
= 1
1
2
60
rpm = πrad/s
CINEMÁTICA
2UNIDAD

53
del periodo (T ): o bien que nos da la velocidad angular en función del periodo
o de la frecuencia respectivamente.
También vamos a deducir otra fórmula que nos va a permitir relacionar de modo inmediato la
velocidad lineal con la angular.
Si la longitud de la circunferencia es , la velocidad lineal en la trayectoria será:
de donde deducimos que
Si razonamos sobre la fórmula obtenida, comprobamos que la velocidad de un punto es
directamente proporcional al radio, es decir a la distancia que le separa del centro.
En la figura 10, podemos observar que el vector velocidad es en todo momento tangente a
la trayectoria, por lo que su dirección cambia constantemente.
Recordemos que la aceleración es un vector cuyo valor es el cociente entre el incremento
del vector velocidad y el incremento de tiempo.
Si el vector velocidad varía, aunque su módulo sea constante, existe una aceleración, que
tiene la dirección y el sentido de y va dirigida hacia el centro de la circunferencia como puede
apreciarse en la figura 11 al hacer coincidir los orígenes de y de . Por esta razón se la
denomina aceleración normal o aceleración centrípeta.
El módulo de la aceleración vendrá dado por
Para poder hallar el valor, fijémonos en que los dos triángulos formados en la figura 11 son
semejantes ya que el vector velocidad, de módulo v, es siempre perpendicular al radio por lo que
se cumple:
Pero ya que es el espacio recorrido. Sustituyendo: , despejando:
ϕΔrr
1v
2v
Fígura 10: Vector velocidad en el MC
v r= ω
l r= 2π v rT
= 2π
ω π= 2
T ω π= 2 f
Δ Δs v t= Δ Δvv
v tr
=
Δ Δvv
sr
=
a vt
= ΔΔ
rv
1
rv
2
Δrv

54
y dividiendo ambos miembros por Δt, obtenemos: o lo que es lo mismo:
También podemos expresar la aceleración centrípeta en función de la velocidad angular:
por lo que
Δ Δv v tr
=2
sΔr
1v
2vv
2vΔ
Fígura 11: Aceleración centrípeta
ΔΔvt
vr
=2
arrc =
( )ω 2
a rc = ω2
a vrc =2
CINEMÁTICA
2UNIDAD
Un caballito de un tiovivo que gira con una velocidad angular de 1 radián por segundo se
encuentra a 4 m del centro. Calcular:
a) La velocidad lineal del caballito.
b) El periodo y la frecuencia de su movimiento.
c) La aceleración centrípeta.
Solución:
a) Sabemos que
b) El periodo será:
La frecuencia es la inversa del periodo:
c) La aceleración centrípeta a vr
msc = = = −2 2
2
4
4
4
fT
Hz= =1
0 16,
T s= = =2 2
1
6 28
πω
π,
v r ms= = ⋅ = −ω 1 4 4
1
E j e m p l o
8. a) Calcular la velocidad angular, el periodo y la frecuencia del segundero de un reloj.
b) Si tiene una longitud de 2 cm ¿cuál será la velocidad lineal de su extremo?
c) ¿Cuánta distancia recorrerá éste en un día?
A c t i v i d a d e s
55
3.2. Movimiento circular uniformemente aceleradoSi un objeto que gira aumenta o disminuye su velocidad angular (por ejemplo, las ruedas
de un automóvil cuando acelera o frena) tiene una aceleración angular. Su valor viene dado por
la expresión:
Éste es el valor de la aceleración angular durante un tiempo determinado o aceleración angular
media.
También podemos conocer la aceleración angular instantánea que será:
Como hemos visto al definir la velocidad instantánea, esta expresión es la derivada de la
velocidad angular con respecto al tiempo y se representa por:
Dado que estamos estudiando el movimiento circular uniformemente acelerado, la aceleración
es constante y por lo tanto la aceleración instantánea tiene el mismo valor que la aceleración
media y, en general, para calcular la aceleración en este tipo de movimiento, tomando t0 = 0,
bastará con utilizar la fórmula:
Si despejamos ω tendremos que la velocidad angular valdrá: ω = ω0 + αt
A continuación vamos a obtener la ecuación que nos dará el ángulo descrito:
ϕ = ωm
t
En este movimiento también existe una aceleración normal, igual que en el movimiento circular
uniforme y su valor es el mismo: , aunque hemos de tener en cuenta que en este caso
la velocidad no es constante y, por tanto, tampoco lo es la aceleración normal.
La velocidad lineal del objeto que realiza un movimiento de este tipo también varía por lo que
habrá una aceleración tangencial: , de donde
α ω= ddt
α ω=→
lim
Δ
ΔΔt t0
α ω= ΔΔt
a vt
rtt = =Δ
ΔΔΔω a rt = α
a vrc =2
ωω ω ω ω α
ω αmt
t=+
=+ +
= +0 0 0
0
2 2
1
2
ϕ ω α= +0
2
1
2
t t
αω ω
=−
0
t
Un motor que gira a 3000 rpm tiene un volante de inercia de 10 cm de radio. En un instante
determinado, se desconecta el motor y el volante va decelerando uniformemente hasta pararse al
cabo de 2 minutos. Calcula:
a) La aceleración angular del volante.
b) La aceleración lineal de un punto de su periferia.
c) El número de vueltas que ha dado antes de pararse.
E j e m p l o

56
4. Composición de movimientosImaginemos que un pasajero de un tren se ha cambiado de vagón en el transcurso del viaje.
Si queremos conocer el desplazamiento que ha realizado, tendremos que sumar el del movimiento
del tren y el de su propio caminar.
Sabemos que el desplazamiento es un vector y que la suma de vectores goza de la propiedad
conmutativa por lo que es indiferente el orden en el que la realicemos.
CINEMÁTICA
2UNIDAD
Solución:
En primer lugar pasamos todas las unidades al Sistema Internacional:
2 min = 120 s
10 cm = 0,1 m
a) Aceleración angular:
b) Sabemos que
c) Hallamos el ángulo descrito:
y le pasamos a revoluciones o vueltas:18835 11 18835 11
1
2
2997 7, , ,rad rad revrad
rev= =π
ϕ ω α π= + = ⋅ − ⋅ =0
2 2
1
2
100 120
1
2
2 62 120 18835 11t t rad, ,
a r ms= = − ⋅ = − −α 2 62 0 1 0 26
2
, , ,
α ω ω ω π= =−−
= − = − ⋅ −ΔΔt t t
rad s2 1
0
2
0 100
120
2 62,
3000 3000
2
60
100
1
rev rads
rad smin
= = ⋅ −π π
o b ` r b o a^
T El periodo y la frecuencia son inversos entre sí.
T En el movimiento circular uniforme existe una aceleración (aceleración normal) debido al cambio
de dirección que experimenta su velocidad.
T En el movimiento circular uniformemente acelerado existe una aceleración tangencial, y una
aceleración normal. La primera se debe a la variación del módulo del vector velocidad y la
segunda al cambio de la dirección.
T La aceleración tangencial y la aceleración normal son las componentes intrínsecas de la
aceleración que estudiamos en el apartado 1.5.
9. Una noria de 5 metros de radio tarda 30 segundos en adquirir su velocidad de régimen que es
de 3 radianes por segundo. Calcular las componentes intrínsecas de la aceleración que existe
en una de las barquillas a los 10 segundos de iniciar el movimiento y la aceleración total en la
misma.
A c t i v i d a d e s

57
Teniendo en cuenta esto, podemos enunciar el principio de superposición que dice “si una
partícula es sometida a varios desplazamientos independientes, el desplazamiento resultante es
la suma vectorial de los desplazamientos parciales, independientemente del momento en que se
realicen”.
Asimismo, la velocidad con la que se desplaza en un instante determinado será la suma
vectorial de las velocidades de los dos movimientos e igualmente ocurre con la aceleración.
4.1. Lanzamiento horizontal
Un ejemplo típico de movimiento compuesto por dos movimientos independientes se da
cuando se lanza un objeto horizontalmente. A medida que el objeto se aleja del punto de lanzamiento
va cayendo hacia el suelo debido a la atracción que la Tierra ejerce sobre él y que se manifiesta
por la aceleración de la gravedad.
Así pues el cuerpo está sometido a dos movimientos:
• Uno horizontal, rectilíneo uniforme debido al impulso que se le ha suministrado en el
momento del lanzamiento.
• Otro vertical, rectilíneo uniformemente acelerado, en sentido descendente debido a la
aceleración de la gravedad.
Estos dos tipos de movimiento los hemos estudiado en el epígrafe 2 por lo que no tendremos
dificultad para hallar las ecuaciones que rigen el lanzamiento horizontal.
0v
0vvx =
gtvy -=
X
Y
v
Fígura 13: Lanzamiento horizontal
1r
2r
1r
1r
2r
2r21 rrr +=
12 rrr +=
Fígura 12: Principio de superposición

58
Si representamos el movimiento en un sistema de ejes cartesianos vemos que el movimiento
debido al impulso inicial se realiza en el eje X y el debido a la aceleración de la gravedad en el
eje Y. Así pues las ecuaciones que rigen este movimiento serán:
Velocidad: vx = v0Eje X
{
Posición: x = vt
Velocidad: vy = -- gtEje Y
{
Posición:
Vamos a conocer una serie de características muy interesantes sobre este movimiento:
Tiempo que tarda en llegar al suelo
Supongamos que el cuerpo se lanza horizontalmente desde una altura h con una velocidad
v0 y que el suelo es horizontal.
El cuerpo llegará al suelo justamente cuando haya descendido una altura h, es decir, cuando
la componente vertical y valga --h (el movimiento vertical en este caso es hacia abajo). Luego:
despejando t, obtenemos:
Podemos observar que el tiempo que tarda es el mismo que si se hubiera soltado en caída
libre desde una altura h por lo que no depende de la velocidad inicial del lanzamiento.
Alcance horizontal
Ya hemos visto el tiempo que tarda en llegar al suelo por lo que sólo tendremos que sustituir
este valor en la ecuación de la componente horizontal:
Ecuación de la trayectoria
Para hallar esta ecuación basta con eliminar t entre las ecuaciones de las posiciones horizontal
y vertical. Despejamos el tiempo en la ecuación ; y sustituimos en
con lo que obtenemos: o bien
Esta expresión corresponde a la ecuación de una parábola, aunque normalmente se denomina
movimiento parabólico al que estudiaremos en el apartado siguiente.
y g xv
= − 1
2
2
0
2
y gv
x= −2
0
2
2
x v t t xv
= ⇒ =0
0
y gt= − 1
2
2
y gt= − 1
2
2
t hg
= 2
− = −h gt1
2
2
x v hg
=0
2
CINEMÁTICA
2UNIDAD

59
4.2. Lanzamiento inclinadoEste movimiento se da cuando se lanza un objeto con un ángulo de inclinación α. Del mismo
modo que en el apartado anterior, el movimiento del cuerpo estará compuesto por el debido al
lanzamiento y el debido a la acción de la gravedad.
Si fijamos el origen de coordenadas en el punto de lanzamiento podemos ver que la velocidad
inicial tiene dos componentes, una horizontal que representamos en el eje X y otra vertical que
representamos en el eje Y.
El movimiento horizontal es uniforme ya que no existe aceleración en esta dirección, por tanto:
Velocidad: vx = v0 · cos αEje X
{
Posición: x = (v0 · cos α ) t
El movimiento vertical es uniformemente acelerado ya que está sometido a la aceleración de
la gravedad:
Velocidad: vy = v0 · sen α -- g tEje Y
{
Posición: y v sen t g t= ⋅( ) −
0
2
1
2
α
α
xv0
yv0
xv
yv
0v
v
X
Y
Fígura 14: Movimiento parabólico
10. Un cubito de hielo resbala sobre una mesa de 80 cm de altura, correctamente nivelada, con una
velocidad de 3 ms-1
de modo que al llegar al borde, cae al suelo. Calcular:
a) El tiempo que tarda en llegar al suelo.
b) La distancia del punto de impacto a la vertical del punto de la mesa desde el que cayó.
c) La ecuación de la trayectoria que describe.
A c t i v i d a d e s

60
Utilizando adecuadamente estas ecuaciones podemos conocer muchos aspectos interesantes
sobre este movimiento. Además, para ilustrarlo realizaremos, simultáneamente con la explicación
teórica, un ejemplo práctico en el que se analizará con detalle lo que ocurre cuando un portero
da una patada al balón que sale disparado con una inclinación de 30º sobre la horizontal y una
velocidad inicial de 20 ms-1
. Despreciamos el rozamiento del aire.
Altura máxima que alcanza
Durante el ascenso, la velocidad va disminuyendo por acción la gravedad hasta el instante
en que se hace nula y comienza a descender. Por lo tanto la altura máxima se alcanza cuando
el valor de la velocidad en el eje Y sea cero (vy =0). Sustituyendo en la ecuación correspondiente,
tenemos:
Si en esta ecuación despejamos t y sustituimos en la ecuación de la posición vertical,
obtendremos la altura máxima alcanzada por el balón o el punto más alto de la trayectoria:
; sustituyendo:
Tiempo que tarda en llegar al suelo
Esta situación se da cuando y = 0; sustituyendo en la ecuación correspondiente, tenemos:
Dado que es una ecuación de segundo grado obtenemos dos soluciones, una de ellas es t =
0, solución evidente, ya que en ese instante el balón se encuentra en el suelo porque aún no se
ha realizado el saque. La solución que buscamos es:
; sustituyendo:
Alcance máximo horizontal
El alcance máximo se da cuando el balón llega al suelo, suponiendo que éste es horizontal,
en nuestro caso, lo debe ser. Esta situación se da para el valor de t que acabamos de calcular.
Sustituimos en la ecuación de la posición horizontal y obtendremos el alcance máximo.
sustituyendo:
Ángulo de la trayectoria en un instante determinado
En la figura 14 podemos ver que para cualquier instante se cumple que tg
vv
y
xα =
xv sen
gmax
cos
=2
0
2 α α x sen mmax
cos
,
,= ⋅ =2 20 30 30
9 8
35 35
2
0
0
= −v sen gtα
tv sen
g=
2
0
αt sen s= ⋅ =2 20 30
9 8
2 04
,
,
0
1
2
0
2= ( ) −v sen t g tα
yv sen
gmax
=( )
0
2
2
αy
senm
max
,
,=( )
⋅=
20 30
2 9 8
5 10
2
CINEMÁTICA
2UNIDAD

61
En nuestro caso podemos calcular el ángulo de la trayectoria para un tiempo concreto; por
ejemplo, un segundo después del saque:
Calculamos Vx y Vy :
;
Vemos que Vy es muy pequeña, debido a que en este tiempo el balón está llegando al punto
más alto de su trayectoria.
Sustituimos en la ecuación:
de donde
También observamos que el ángulo es muy pequeño, esto nos indica que el balón está casien su punto más alto, en el cual la trayectoria es horizontal.
Ecuación de la trayectoria
Si en la ecuación de la posición horizontal despejamos t y sustituimos en la de la posición
vertical obtenemos la ecuación de la trayectoria:
realizando operaciones, obtenemos:
Como podemos comprobar corresponde a la ecuación de una parábola y por esto se denomina
movimiento parabólico.
v v msx = = = −0
1
20 30 17 32cos cos ,α v v sen gt sen msy = − = − ⋅ = −0
1
20 30 9 8 1 0 2α , ,
α = =arctg0 012 0 69
0
, ,
tagvv
y
xα = = =0 2
17 32
0 012
,
,
,
y x x= − +0 016 0 58
2
, ,
y gv
x tg x x tg= −⎛
⎝⎜
⎞
⎠⎟ + ( ) = −
⋅⎛⎝⎜
⎞⎠⎟
+ (2
9 8
2 20 30
30
0
2 2
2
2 2
2
cos
,
cosαα )) x
11. En un salto de longitud, el atleta corre con una velocidad de 8 m s
-1
y en el instante de saltar se
impulsa hacia arriba consiguiendo una velocidad de 3 ms
-1
en sentido vertical. ¿Cuál será la lon-
gitud de su salto?
A c t i v i d a d e s
o b ` r b o a^
T En la composición de movimientos se cumple el principio de superposición.
T Tanto en el lanzamiento horizontal como en el inclinado existen dos tipos de movimiento: uno
horizontal rectilíneo uniforme y otro vertical rectilíneo uniformemente acelerado. En ambos
casos, la ecuación de la trayectoria es una parábola.