control no lineal _basura
TRANSCRIPT
7/25/2019 Control No Lineal _basura
http://slidepdf.com/reader/full/control-no-lineal-basura 1/7
¡Participa de nuestro desafío de edición!
Tú también puedes mejorar la Wikipedia en español.
Uniciclo autoequilibrado
Uniciclo en acción
Un monociclo autoequilibrado o uniciclo autobalanceado es un tipo de monociclo,considerado unvehículo eléctrico, que utiliza sensores, giroscopios y acelerómetros enconjunción con un motor eléctrico, para asistir al piloto en el equilibrio en este vehículo queposee una sola rueda.
ndice
[ocultar ]
• !eoría de control del uniciclo autoequilibrado
• "#onociclos autoequilibrados montables por humanos
o ".Uniciclos montables autobalanceados de dos ejes
ver$%deros
•
&'éase también
• ()nlaces e*ternos
• +e-erencias
Teoría de control del uniciclo autoequilibrado[editar ]
7/25/2019 Control No Lineal _basura
http://slidepdf.com/reader/full/control-no-lineal-basura 2/7
)l problema de crear un monociclo autoequilibrado, un monociclo autoalimentado que seequilibra en las tres dimensiones, es un problema interesante en la robótica y la teoría decontrol. )l trabajo teórico sobre el problema del monociclo se complementa con el trabajo enla construcción de monociclos montado mec/nicamente reales.
)n primer lugar, un monociclo autoequilibrado puede ser considerado como un sistemade control no lineal similar al de un péndulo invertido de dos dimensiones con un carrito de
monociclo en su base0 sin embargo, hay muchos e-ectos de orden superior que participan enel modelado del sistema completo. 1a rotación de la rueda de accionamiento en sí mismapuede proporcionar un control en una sola dimensión 2es decir, hacia delante y hacia atr/s30 elcontrol en otras dimensiones generalmente requiere otros actuadores, tales como péndulosau*iliares, ruedas de reacción o 4iroscopio de control de momento unidos al péndulo principaldel monociclo.
Monociclos autoequilibrados montables por humanos[editar ]
niciclos montables autobalanceados de dos ejes "er#$deros [editar ]
Un uniciclo autobalanceado de dos ejes se equilibra por sí mismo tanto hacia adelante, comohacia atr/s, y también de un lado a otro.
• )n "55&, 6ombardier anunció un dise7o conceptual para un
dispositivo de este tipo que se utilizaba como un vehículo dedeporte, el )#689.
• )l )nicycle de %le:sander ;olutni: 2"55<3, es probablemente
el primer monocilclo autoequilibrado de dos ejes montable por seres humanos
• )n "55=, yno #otors de ;ortland, 9regon creó una
motocicleta eléctrica de una rueda llamada #icro>ycle.?eg@n la compa7ía, una versión comercial est/ programadapara comenzar a comercializarse en abril de "5(.
• )n "5 8nventist comercializa una versión de pie y sin
asiento llamada ?oloAheel.
• )n "5&, mobbo" y )>96oomer i4o 2con asiento3&
• )n "5(, %irAheel ( y 4oBheel comercializa los modelos de
Cueva 4eneración 4oBheel +
• )n "5+ Ceopatini.<
Véase también[editar ]
7/25/2019 Control No Lineal _basura
http://slidepdf.com/reader/full/control-no-lineal-basura 3/7
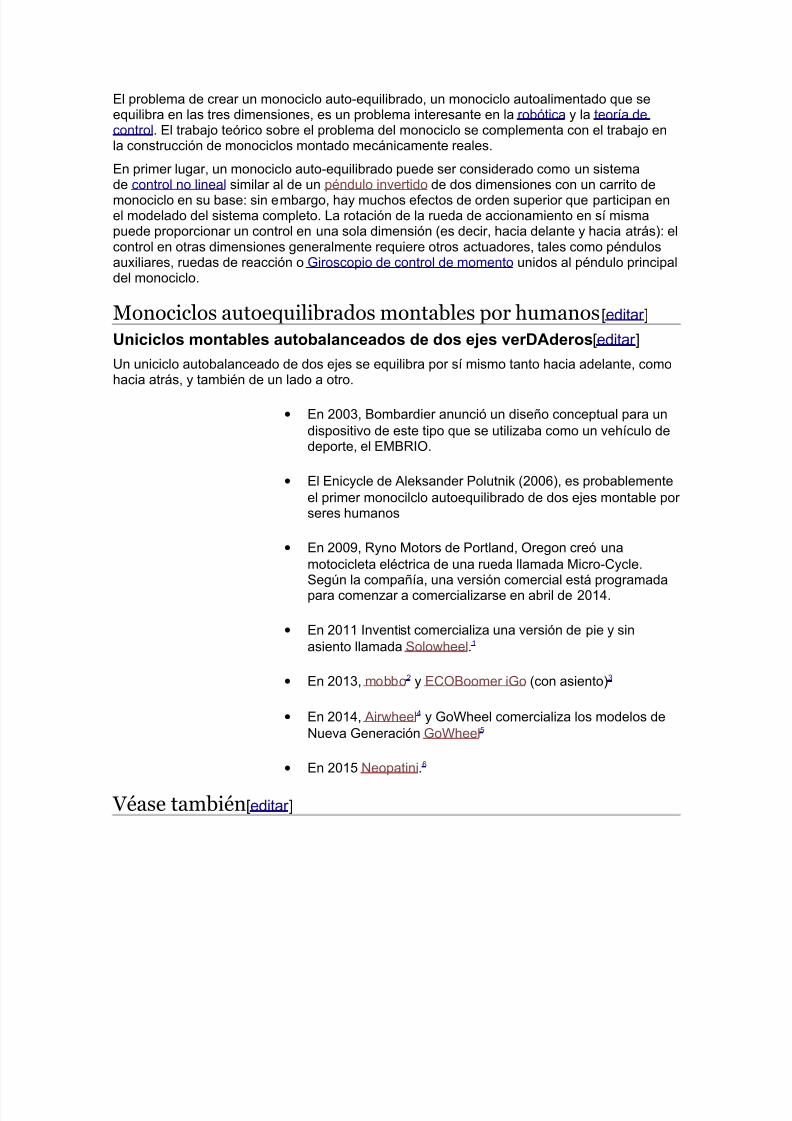
Uniciclo de -rente
• 1ista de temas de ciclismo
•
>harles D. !aylor , prototipos de trabajo =&==<(
• 4iroscopio de control de momento
• ;éndulo de rueda de inercia
• ;éndulo invertido
• !ortuga 2robot3
• 'ehículo de 6raitenberg
• obots equilibrados de una rueda 2en inglés3
Enlaces externos[editar ]
• #onociclo )léctrico 4oBheel
• Uniciclos autoequilibrados Ceopatini
• Bi:imedia >ommons alberga contenido multimedia
sobre niciclo autoequilibrado.
• 1as ruedas de la rueda0 monociclos autobalanceados.
• ?:ate 9ne
• %irBheel
• Unbo*ing del 8;?5.
7/25/2019 Control No Lineal _basura
http://slidepdf.com/reader/full/control-no-lineal-basura 4/7
• 6ombardier ecreation ;roducts )#689 oneAheeled
recreational vehicle concept design
• >hina version soloAheel.
• !he loonycycle, Ahich super-icially resembles a simple robotic
unicycle, but uses sidethrusting -ans -or lateral balance
• osie the obot a Euestion o- 6alance Fen ;erlinGs page on
robotic unicycles, Aith designs and java applet e*amples.
• !he Unibot0 a Aor:ing robotic unicycle built -or a university
engineering project 2Aith movies3
• obotic Unicycle0 9ngoing project
• #icycle 2reports, papers, photographs and movies3
• #ilbay %ustralia 2)?B%H brand models, in-ormation,
photographs and movies3
• IUnicycle riding robot unveiledJ. 66> CeAs. "( de
septiembre de "55K. >onsultado el "( de noviembre de "55K.
• #onociclo )léctrico !ecnocio.com
Referencias[editar ]
• )sta obra deriva de la traducción de Self-balancingunicycle de Bi:ipedia en inglés, publicada por suseditores bajo la 1icencia de documentación libre de 4CU yla 1icencia >reative >ommons %tribución>ompartir8gual &.5Unported.
• ?. '. Ulyanov et al. Soft computing for the intelligent robust
control of a robotic unicycle with a new physical measure formechanical controllability. ?o-t >omputing 'olume " 8ssue "2==K3 pp L&MKK.
• Nen:ov, $', %# 6loch, and O) #arsden ["55] The
Lyapunov-Malkin Theorem and Stabilization of the Unicyclewith ider . ?ystems and >ontrol 1etters, 'olume (+, Cumber(, + %pril "55", pp. "=&M&5"253 2postscript -ormat availablehere []3
• Nen:ov, $', %# 6loch, C) 1eonard and O)
#arsden, Matching and Stabilization of Low-dimensional!onholonomic Systems. ;roc. >$>, &=, 2"5553, "K="=+.2pd- -ormat available here ["]3

7/25/2019 Control No Lineal _basura
http://slidepdf.com/reader/full/control-no-lineal-basura 5/7
• ?heng, NaiquanP Hama-uji, Fazuo0 ealization of a "uman
iding a Unicycle by a obot. ;roceedings o- the ==+ 8)))8nternational >on-erence on obotics and %utomation, 'ol. "2c==+3, pp &=M&"<
• %. ?choonAin:el, Q$esign and test o- a computer stabilized
unicycle,Q ;h.$. dissertation, ?tan-ord University, >ali-ornia,=KL.
• Oohnson, .>. Unicycles and bi-urcations, #merican $. of
%hysics, volume <<, no.L, +K=="
. 'olver arriba R 8nventist ?oloAheel
". 'olver arriba R #obbo
&. 'olver arriba R )>96oomer i4o de 26 kg y rueda de 40 cm
(. 'olver arriba R %irAheel E&
+. 'olver arriba R 4oBheel
<. 'olver arriba R Ceopatini. 10 Kg
>ategorías0
• 'ehículos eléctricos
• #onociclo
#en@ de navegación
• Co has iniciado sesión
• $iscusión
• >ontribuciones
• >rear una cuenta
• %cceder
• %rtículo
• $iscusión
• 1eer
• )ditar
• 'er historial
• ;ortada
• ;ortal de la comunidad
• %ctualidad
• >ambios recientes
• ;/ginas nuevas
• ;/gina aleatoria
8r
7/25/2019 Control No Lineal _basura
http://slidepdf.com/reader/full/control-no-lineal-basura 6/7
• %yuda
• $onaciones
• Coti-icar un error
8mprimirSe*portar
• >rear un libro
• $escargar como ;$D
• 'ersión para imprimir
Terramientas
• 1o que enlaza aquí
• >ambios en enlazadas
• ?ubir archivo
• ;/ginas especiales
• )nlace permanente
• 8n-ormación de la p/gina
• )lemento de Bi:idata
• >itar esta p/gina
9tros proyectos
• >ommons
)n otros idiomas
• )nglish
• VWXY
• DranZais
• 6ahasa 8ndonesia
• \^_`
• ?lovenina
)ditar enlaces
• )sta p/gina -ue modi-icada por @ltima vez el "K nov "5+ a las 5<0(.
• )l te*to est/ disponible bajo la 1icencia >reative >ommons %tribución >ompartir
8gual &.5P podrían ser aplicables cl/usulas adicionales. 1éanse los términos de
uso para m/s in-ormación.
Bi:ipedia es una marca registrada de la Dundación Bi:imedia, 8nc., una
organización sin /nimo de lucro.
• >ontacto
• ;olítica de privacidad
• %cerca de Bi:ipedia
• 1imitación de responsabilidad
• $esarrolladores
• $eclaración de coo:ies
• 'ersión para móviles
•
•

7/25/2019 Control No Lineal _basura
http://slidepdf.com/reader/full/control-no-lineal-basura 7/7