complemento didÁctico capÍtulo 2. cinemÁtica del cuerpo … · cinemÁtica del cuerpo rÍgido...
TRANSCRIPT
Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
1
COMPLEMENTO DIDÁCTICO
CAPÍTULO 2. CINEMÁTICA DEL CUERPO RÍGIDO
EJEMPLO RESUELTO
APLICACIÓN DE LOS MÉTODOS DEL MOVIMIENTO ABSOLUTO
Y DEL MOVIMIENTO RELATIVO
ROTACIONES CONCURRENTES
H
�⃗⃗� 1
î
’
1
î
’
2
î
’
3
Z
X
Y
ψ(t)=
20 t
Ángul
o de
preces
ión
A
0 0
1 î
1
î
2
î
3 �⃗⃗� 2
JULIO 2015

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
2
CINEMÁTICA DEL CUERPO RÍGIDO
EJEMPLO RESUELTO MEDIANTE LA APLICACIÓN DE LOS MÉTODOS DEL
MOVIMIENTO ABSOLUTO Y DEL MOVIMIENTO RELATIVO.
Objetivo: Determinar la configuración y los estados de velocidad y aceleración de un
cuerpo utilizando para el análisis los métodos absoluto y relativo vistos en el Capítulo 2.
Practicar con sistemas coordenados fijos y móviles, expresando los vectores en una
terna fija al marco de referencia absoluto y en otra móvil con respecto a éste. Concluir
acerca de la conveniencia de uno y otro método.
Problema: Sea la rueda B de la Figura 1 sometida a la rotación alrededor del eje
vertical y obligada a rodar sin deslizar sobre el plano horizontal. Los parámetros
geométricos y cinemáticos del problema son:
A= 20 cm, H=10 cm, ψ(t)= 20 t y 1 =20 1/s
Establecer el marco de referencia absoluto y determinar para un sistema coordenado fijo
a dicho marco y para otro móvil con respecto a él, lo siguiente:
1) Configuración del sistema
2) Invariantes vectorial, escalar y tipo de movimiento
3) Aceleración angular de la rueda
4) Velocidad del punto P usando como centros de reducción un punto fijo al marco
de referencia y otro en el centro de la rueda
5) Graficar los vectores velocidad hallados en ambos sistemas coordenados
6) Aceleración del punto P utilizando diferentes centros de reducción
Figura 1: Esquema del ejemplo de aplicación.
�⃗⃗� 2
ψ(t) = 20 t
A
B
P
H
�⃗⃗� 1
C

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
3
I. MÉTODO DEL MOVIMIENTO ABSOLUTO
Marco de referencia y sistemas coordenados:
Para el ejemplo propuesto, el observador absoluto ubicado en el marco de referencia
representado por los ejes {0, X, Y, Z} puede ver dos rotaciones, la aplicada sobre el eje
vertical que hace mover al brazo A ( 1 ) y la propia de la rueda producto del
rodamiento sin deslizamiento ( 2 ). Bajo este esquema se ubican una terna absoluta
{0, î1, î2, î3} fija al marco de referencia y una terna móvil {01, î’1, î’2, î’3} unida
solidariamente al brazo A cuyo eje î’3 se mueve paralelo a sí mismo con la rotación 1 ,
como puede observarse en la Figura 2.
Figura 2: Marco de referencia y sistemas coordenados seleccionados.
1- Configuración:
Según el apartado 2.5.1, “los seis grados de libertad de un cuerpo quedan establecidos a
través de los seis parámetros libres dados por los tres ángulos de Euler y las tres
coordenadas del origen del sistema móvil”. En este caso, se tiene:
X01(t) = A cos ω1t
Y01(t) = A sen ω1t
Z01 (t) = H
ψ(t) = ω1t (Precesión)
θ(t) = π/2 (Nutación)
H
�⃗⃗� 1
î’1
î’2
î’3
Z
X
Y
ψ(t)=20 t
Ángulo de precesión
A
0
01
î1
î2
î3 �⃗⃗� 2

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
4
φ(t) = ω2t (Spin)
2- Invariantes vectorial, escalar y tipo de movimiento.
2.1. Invariante Vectorial. Según la ecuación (2.20) se tiene
1
N
T i
i
Expresado en el sistema coordenado fijo:
1 3 2 2 1ˆ ˆ ˆcosT i sen i i
Expresado en el sistema coordenado
móvil:
1 3 2 1ˆ ˆ' 'T i i
Resulta sencillo demostrar que siendo 1 1 2ˆ ˆ ˆ' cosi i sen i e 33
ˆ'ˆ ii las formas
vectoriales de los versores de la terna móvil expresados en la fija, sendas expresiones
para T
representan al mismo vector.
Para calcular 2 , sabiendo que el punto de contacto entre la rueda y el plano horizontal
posee velocidad nula respecto del observador, se tiene:
0ˆ221
iRA
y por lo tanto resulta:
2 1
1ˆ40 is
2.2 Invariante Escalar. Según la expresión (2.21), se tiene:
ˆ01 V
ψ
�⃗⃗� 2
î2
î1
ψ
�⃗⃗� 2 î'2
î'1
�⃗⃗� 1
î'3

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
2
Expresado en el sistema coordenado fijo
a) Tomando como Centro de Reducción al punto 0
En este caso el centro de reducción se encuentra fuera de la región del espacio
comprendida por el cuerpo. Por lo tanto, según lo señalado durante la deducción de la
expresión (2.14) para la forma impropia de la ley de distribución de velocidades, se
deberá calcular la velocidad que tendría dicho punto si el cuerpo le impusiera su
movimiento, como puede verse en la Figura 3 donde se incorporó al punto 0 en una
extensión idealizada de la rueda.
Figura 3: Representación idealizada del Centro de Reducción 0 como parte del cuerpo.
10 2 0 0
1 2 3
0 2 2
0 2 1 2 2 2 3 2 3
ˆ ˆ ˆ
cos 0
cos
ˆ ˆ ˆ ˆcos cos cos
V r
i i i
V sen
A Asen H
V H sen i H i A sen i A sen i
�⃗⃗� 2
î’1
î’2
î’3
0 01
Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
3
0 2 1 2 2ˆ ˆcosV H sen i H i
1 3 2 2 12 1 2 2
2 21 2
2 22 2
2 2 2 21 2 1 2
ˆ ˆ ˆcosˆ ˆcos
cos cos
i sen i iH sen i H i
H sen H sen
0
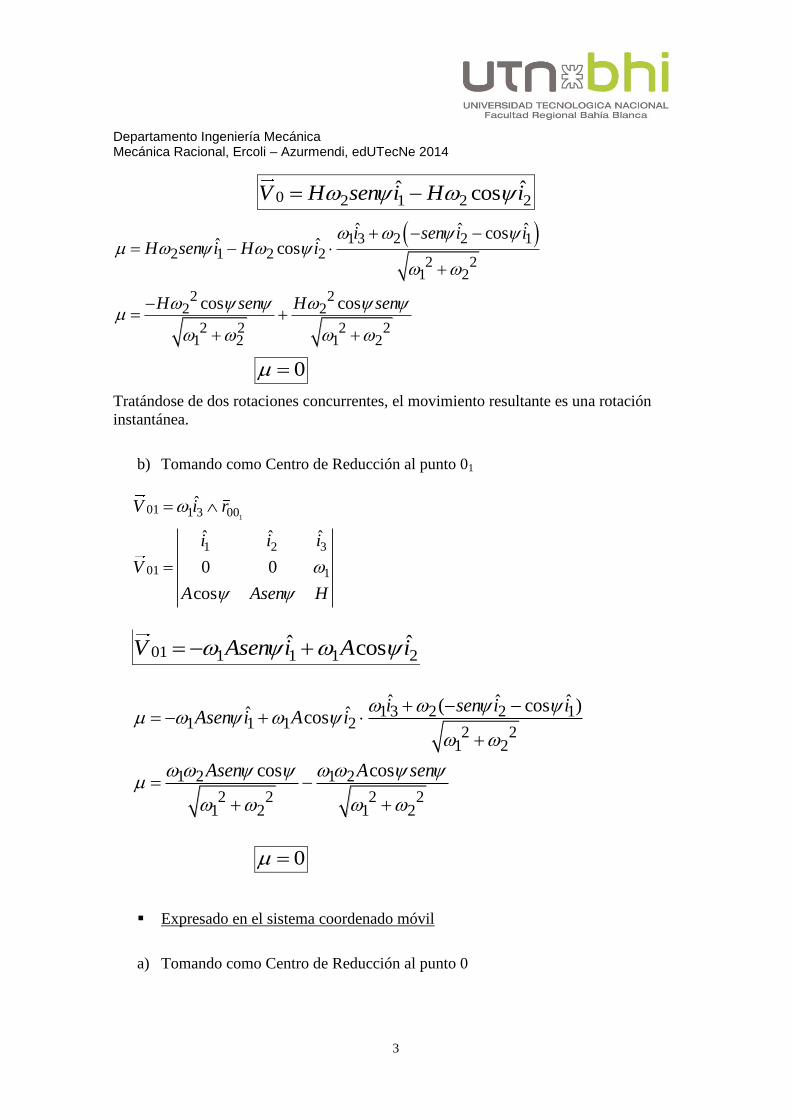
Tratándose de dos rotaciones concurrentes, el movimiento resultante es una rotación
instantánea.
b) Tomando como Centro de Reducción al punto 01
101 1 3 00
1 2 3
01 1
ˆ
ˆ ˆ ˆ
0 0
cos
V i r
i i i
V
A Asen H
01 1 1 1 2ˆ ˆcosV Asen i A i
1 3 2 2 11 1 1 2
2 21 2
1 2 1 2
2 2 2 21 2 1 2
ˆ ˆ ˆ( cos )ˆ ˆcos
cos cos
i sen i iAsen i A i
Asen A sen
0
Expresado en el sistema coordenado móvil
a) Tomando como Centro de Reducción al punto 0

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
4
10 2 1 0 0
1 2 3'
0 02 2 2 2
ˆ '
ˆ ˆ ˆ' ' '
ˆ ˆ0 0 ' 4
0
V i r
i i im
V V H i is
A H
1 3 1 12 2 0
2 21 2
ˆ ˆ' 'ˆ ' T
i iH i V
0
b) Tomando como Centro de Reducción al punto 01
101 1 3 00
1 2 3'
01 1 1 2 2
ˆ '
ˆ ˆ ˆ' ' '
ˆ ˆ0 0 ' 4
0
V i r
i i im
V A i is
A H
1 3 1 11 2 0
2 21 2
ˆ ˆ' 'ˆ ' T
i iA i V
0
Estando sometido a dos rotaciones concurrentes, el movimiento resultante del disco es
una rotación instantánea. Así, el observador percibe en cada instante que todos los
puntos del disco inician un movimiento de rotación alrededor del eje el cual, por
encontrarse en el plano coordenado ' '
1 3ˆ ˆ( , )i i , viaja respecto de él con velocidad angular
1 .
3- Aceleración Angular:
Es: d
dt
Expresada en el sistema coordenado fijo:

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
5
1 3 2 2 2 1
0 00 0
31 2 23 1 2 2 2 2
00
2 11 2 1 2
2 2 2 1
ˆ ˆ ˆcos
ˆ ˆˆ ˆ ˆ
ˆcosˆ ˆ cos cos
cosˆ ˆ
di sen i i
dt
did d didseni sen i i sen
dt dt dt dt dt
d didi i
dt dt dt
dsen di i
dt dt
1 2 1 2ˆ ˆcossen i i
Expresada en el sistema coordenado móvil:
1 3 2 1
00 0
31 2 13 1 1 2
12
ˆ ˆ' '
ˆ ˆ' 'ˆ ˆ' '
ˆ '
di i
dt
did d dii i
dt dt dt dt
di
dt
Aplicando las Fórmulas de Poisson, ecuaciones (2.18):
1 1 1 3 1 1 21 ˆ ˆ ˆ ˆ' ' ' '
ˆ 'i i i i
di
dt
2
2 '1 2 2 2
1ˆ ˆ' 800i is
En la que ahora es: 2 1 2ˆ ˆ ˆ' cosi sen i i
4- Velocidad del punto P:
Para conocer la velocidad del punto P se empleará la forma impropia de la ley de
distribución de velocidades (2.14) tomando como centro de reducción a los puntos 0 y
01
P CR CR PV V r

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
6
4.1- Tomando como centro de reducción al origen del sistema coordenado fijo 0
(Terna fija); 0CRV V
1 2 3
2 1 2 2 2 2 1
2 1 2 2 2 1 1 1 2 2
1 2 2 3 2 3
2 1 2 2
ˆ ˆ ˆ
ˆ ˆcos cos
cos 2
ˆ ˆ ˆ ˆ ˆcos 2 2 cos
ˆ ˆ ˆ cos cos cos
ˆ ˆcos
P
P
P
i i i
V H sen i H i sen
A Asen H
V H sen i H i H sen i A sen i H i
A i A sen i A sen i
V H sen i H i
1 1 1 2
1 2 1 2 1 2
ˆ ˆcos
ˆ ˆcos cosP
A sen i A i
V A sen H sen i H A i
1 2 1 2ˆ ˆcosPV A H sen i i
1 2ˆ ˆ8 cosP
mV sen i i
s
4.2- Tomando como centro de reducción al origen del sistema coordenado fijo 0
(Terna móvil); 0crV V
1 2 3
2 2 2 1
2 2 2 2 1 2
2 2 1 2
ˆ ˆ ˆ' ' '
ˆ ' 0
0 2
ˆ ˆ ˆ' 2 ' '
ˆ ˆ' '
P
P
P
i i i
V H i
A H
V H i H i A i
V H i A i
2 1 2 2ˆ ˆ' 8 'P
mV H A i i
s

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
7
4.3- Tomando como centro de reducción al origen del sistema coordenado móvil 01
(Terna fija); 01crV V
1 2 3
1 1 1 2 2 2 1
1 1 1 2 2 1 2 2
ˆ ˆ ˆ
ˆ ˆcos cos
0 0
ˆ ˆ ˆ ˆcos cos
P
P
i i i
V A sen i A i sen
H
V A sen i A i H sen i H i
1 2 1 2 1 2ˆ ˆ ˆ ˆcos 8 cosP
mV A H sen i i sen i i
s
4.4- Tomando como centro de reducción al origen del sistema coordenado móvil 01
(Terna móvil); 01CRV V
1 2 3
1 2 2 1
1 2 2 2
ˆ ˆ ˆ' ' '
ˆ ' 0
0 0
ˆ ˆ' '
P
P
i i i
V A i
H
V A i H i
1 2 2 2ˆ ˆ' 8 'P
mV A H i i
s
Se observa que cuando se expresa el vector velocidad del punto P en el sistema
coordenado fijo, su variación en el tiempo está dada en forma explícita por el ángulo
ψ(t), mientras que cuando se lo expresa en el sistema coordenado móvil está dada en
forma implícita por el mismo ángulo, a través de la rotación del versor 2ˆ 'i .

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
8
5. Graficar los vectores en la terna móvil y en la terna fija
a) Terna fija:
b) Terna Móvil:
Z
X
Y
01
î'
1
1
î'2
î'3
T
2
1
0V
01V
T
2
P PV
î'2
î'3
1
Z
X
Y 0
01
î1
î2
î3 T
2sen
1
0V
01V
T
2 1
P
PV
-î2
-î1
2 cos
î'1

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
9
6. Aceleración del punto P
Como se demostró, el movimiento que realiza el cuerpo es una rotación instantánea. El
eje instantáneo de rotación pasa por los únicos dos puntos fijos del sistema para el
observador: el de concurrencia de ambas rotaciones 02 y el punto de contacto de la
rueda con el plano horizontal. La línea de trazos en la Figura 4 representa la dirección
del vector rotación instantánea, respecto del cual todos los puntos de la rueda realizan
en cada instante trayectorias circulares sobre un plano perpendicular a él.
El punto 02 permanece inmóvil durante el movimiento del cuerpo, siendo por ello un
polo de velocidad y aceleración nulas. El punto de contacto cambia de posición tanto en
el plano como en la rueda, teniendo velocidad instantánea nula respecto del observador,
pero no así la aceleración.
Figura 4: Representación del eje de rotación instantánea
La aceleración del punto P se obtendrá considerando la forma impropia de la ley de
distribución de aceleraciones (2.24)
P CR CR P CR Pa a r r
�⃗⃗� 1
î’1
î’2
î’3
Z
X
Y 0
01
î1
î2
î
3
�⃗⃗� 2
02

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
10
Expresada en el sistema coordenado fijo
6.1. Tomando como centro de reducción al origen del sistema coordenado fijo 0:
0 0 0P P Pa a r r
donde:
2 2
2
2
2
2
0 02 0 0 0 0
0
1 2 3
0 0 1 2 1 2 1 2 1 1 2 2
1 2 3
0 0 2 2 1 2 1 2 2
0
0
ˆ ˆ ˆ
ˆ ˆ s cos 0 cos s
0 0
ˆ ˆ ˆ
ˆ ˆ cos cos
0 0
a a r r
a
i i i
r en H i H en i
H
i i i
r sen H sen i H i
H
r
1 2 32 2 2 2
0 2 2 1 1 2 1 1 2 2 2 3 2 3
2 2
2 2 2 20 1 2 1 1 2 2 1 2 1 1 2 2 2 3 2 3
ˆ ˆ ˆ
ˆ ˆ ˆ ˆcos cos cos
cos 0
ˆ ˆ ˆ ˆ ˆ ˆcos s cos cos
i i i
sen H i H sen i H i H sen i
H sen H
a H i H en i H i H sen i H i H sen i
luego:
1 2 31 2 1 1 2 2
0 1 2 1 2 2 21 2 3 1 2 3
1 2 3
2 1 1 1 2 20 2 2 1
1
ˆ ˆ ˆˆ ˆ2 cos 2
cos 0ˆ ˆcos
cos 2
ˆ ˆ ˆˆ ˆ ˆ2 2 cos
cosˆcos
cos 2
P
P
i i iH i H sen i
r senA sen i A i
A Asen H
i i iH sen i A sen i H i
r senA
A Asen H
2 2 3 2 3ˆ ˆcos cosi A sen i A sen i

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
11
1 2 3
0 2 2 1
2 1 2 1
2 21 2 1 1 1 2 1 2
02 2 2 2 2 2
2 1 2 2 1 2 3
1 2 1 1 2
ˆ ˆ ˆ
cos
2 2 cos cos 0
ˆ ˆ2 cos cos 2
ˆ2 cos cos 2
ˆcos s
P
P
P
i i i
r sen
H sen A sen H A
H A i H sen A sen ir
H A H sen A sen i
a H i H e
2 2 2 22 1 2 1 1 2 2 2 3 2 3
2 2 21 2 1 1 2 2 1 2 3 1 2 3 1 2 1 1 1
2 2 2 21 2 2 1 2 2 3 1 2
ˆ ˆ ˆ ˆ ˆcos cos
ˆ ˆ ˆ ˆ ˆ ˆ 2 cos 2 cos 2 cos cos
ˆ ˆ ˆ 2 2 cos cos
n i H i H sen i H i H sen i
H i H sen i A sen i A i H i A i
H sen i A sen i H i A
2 2 23 2 3 1 2 3ˆ ˆ ˆ2i H sen i A sen i
2 2 2 2 2 21 2 1 1 1 2 1 2 2 2 3
ˆ ˆ ˆ2 cos cos 2 cosPa H A i H sen A sen i H H sen i
2 21 2 3 2ˆ ˆ ˆ240 (cos ) 160P
ma i sen i i
s
6.2.Tomando como centro de reducción al origen del sistema coordenado móvil 01:
01 1 10 0P P Pa a r r
donde:
01 02 2 1 2 1
02
2 1
0 0 0 0
1 2 32 2
0 0 1 2 1 2 1 2 3 1 2 3
0
ˆ ˆ ˆ
ˆ ˆ s cos 0 s cos
cos 0
a a r r
a
i i i
r en A en i A i
A Asen

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
12
2 1
2 1
1 2 3
1 1 1 20 0 2 2 1
2 3 2 3
1 2 3 2 21 1 1 2
0 0 2 2 1
11 1
ˆ ˆ ˆˆ ˆcos
cos sˆ ˆcos cos
cos 0
ˆ ˆ ˆˆ ˆcos
cos s
cos 0
i i iA sen i A i
r enA sen i A sen i
A Asen
i i iA i A sen i
r enA
A sen A
01
2 22 3 1 2 3
2 2 2 2 2 21 2 3 1 2 3 1 1 1 2 1 2 3 1 2 3
ˆ ˆcos s
ˆ ˆ ˆ ˆ ˆ ˆs cos cos cos s
i A en i
a A en i A i A i A sen i A i A en i
luego:
1
1
1
1 2 3
0 1 2 1 2 1 2 1 1 2 2
1 2 3
0 2 2 1 2 1 2 2
1 2 31 2 1 1 2
0 2 2 1
2 2
ˆ ˆ ˆ
ˆ ˆcos 0 cos
0 0
ˆ ˆ ˆ
ˆ ˆcos cos
0 0
ˆ ˆ ˆˆcos
cos
cos 0
P
P
P
i i i
r sen H i H sen i
H
i i i
r sen H sen i H i
H
i i iH i H s
r sen
H sen H
2
2 2 2 22 3 2 3
2 2 2 2 21 2 3 1 2 3 1 1 1 2 1 2 3
21 2 3 1 2 1 1 2 2 1 2 1 1 2 2
2 2 2 22 3 2
ˆ
ˆ ˆcos s
ˆ ˆ ˆ ˆ ˆs cos cos cos
ˆ ˆ ˆ ˆ ˆ s cos cos
ˆ ˆ cos s
P
en i
H i H en i
a A en i A i A i A sen i A i
A en i H i H sen i H i H sen i
H i H en i
3
2 21 1 2 1 2 1 1 2 1 2 2 1 2 2
2 2 2 2 2 2 2 21 2 3 1 2 3 1 2 3 1 2 3 2 3 2 3
ˆ ˆ ˆ ˆcos cos cos
ˆ ˆ ˆ ˆ ˆ ˆ s cos cos s cos
Pa A H H i A sen i H sen i H sen i
A en i A i A i A en i H i H sen i
2 2 2 2 2 21 2 1 1 1 2 1 2 2 2 3
ˆ ˆ ˆ2 cos cos 2 cosP
a H A i H sen A sen i H H sen i
2 21 2 3 2ˆ ˆ ˆ240 (cos ) 160P
ma i sen i i
s

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
13
Expresada en el sistema coordenado móvil
6.3.Tomando como centro de reducción al origen del sistema coordenado fijo 0:
0 0 0P P Pa a r r
2 2 2
2
2
0 0 0 0 0 0
0
1 2 3
0 0 1 2 1 2 1
0
ˆ ˆ ˆ' ' '
ˆ 0 0 '
0 0
a a r r
a
i i i
r H i
H
2
2
1 2 3
2 0 0 2 1 2 2
1 2 32
2 2 0 0 2 1 1 2 1 2 3
2
20 1 2 1 1 2 1 2 3
ˆ ˆ ˆ' ' '
ˆ 0 '
0 0
ˆ ˆ ˆ' ' '
ˆ ˆ 0 ' '
0 0
ˆ ˆ ˆ' ' '
i i i
r H i
H
i i i
r H i H i
H
a H i H i H i
luego:
1 2 2
1 2 3
0 1 2 1 2 1 1 2 3
1 2 3
0 2 1 2 1 2
ˆ '
ˆ ˆ ˆ' ' '
ˆ ˆ0 0 2 ' '
0 2
ˆ ˆ ˆ' ' '
ˆ0 2 '
0 2
P
P
i
i i i
r H i A i
A H
i i i
r H A i
A H

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
14
1 2 32 2
0 2 1 1 2 1 1 1 2 3 1 2 3
2 1
2 2 21 2 1 1 2 1 2 3 1 2 1 1 2 3 1 2 1 1 1 2 3 1 2 3
ˆ ˆ ˆ' ' '
ˆ ˆ ˆ ˆ0 2 ' ' 2 ' '
0 2 0
ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ' ' ' 2 ' ' 2 ' ' 2 ' '
P
P
i i i
r H i A i H i A i
H A
a H i H i H i H i A i H i A i H i A i
2 21 2 1 1 2 3
ˆ ˆ2 ' 'Pa H A i H i
2 ' 2 '1 3 2
ˆ240 160P
ma i i
s
Y siendo '
1 1 2ˆ ˆ ˆcosi i sen i , el resultado anterior resulta coincidente con el de los
apartados precedentes.
6.4. Tomando como centro de reducción al origen del sistema coordenado móvil 01:
1 101 0 0P P Pa a r r
2 1
01
1 2 32
0 0 2 1 1 1 1 2 3
1
21 2 3 1 1 1 2 3
ˆ ˆ ˆ' ' '
ˆ ˆ 0 ' '
0 0
ˆ ˆ ˆ' ' '
i i i
r A i A i
A
a A i A i A i
luego:
2 1 2 1
2
01 02 0 0 0 0
0 0
a a r r
a
2 1
1 2 3
0 0 2 1 1 2
ˆ ˆ ˆ' ' '
ˆ 0 '
0 0
i i i
r A i
A

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
15
2 1
1 2 3
0 0 1 2 1 2 3
ˆ ˆ ˆ' ' '
ˆ 0 0 '
0 0
i i i
r A i
A
1
1
1
1 2 3
0 1 2 1 2 1
1 2 3
0 2 1 2 2
1 2 32
0 2 1 1 2 1 2 3
2
2 21 2 3 1 1 1 2 3 1 2 1 1 2 1 2 3
ˆ ˆ ˆ' ' '
ˆ0 0 '
0 0
ˆ ˆ ˆ' ' '
ˆ0 '
0 0
ˆ ˆ ˆ' ' '
ˆ ˆ0 ' '
0 0
ˆ ˆ ˆ ˆ ˆ ˆ' ' ' ' ' '
P
P
P
P
i i i
r H i
H
i i i
r H i
H
i i i
r H i H i
H
a A i A i A i H i H i H i
2 21 2 1 1 2 3
ˆ ˆ2 ' 'Pa H A i H i
6.5. Tomando como centro de reducción el punto de concurrencia 02:
2 2
2
2
2
02 0 0
02
1 2 3
0 1 2 1 2 1 1 2 3
1 2 3
0 2 1 2 2 1 2
1 2 3
0 2 1
2 1
0
ˆ ˆ ˆ' ' '
ˆ ˆ 0 0 ' '
0
ˆ ˆ ˆ' ' '
ˆ ˆ 0 ' '
0
ˆ ˆ ˆ' ' '
0
0
P P P
P
P
P
a a r r
a
i i i
r H i A i
A H
i i i
r H i A i
A H
i i i
r
H A
2 21 2 1 1 1 2 3 1 2 3
2 21 2 1 1 2 3 1 2 1 1 1 2 3 1 2 3
ˆ ˆ ˆ ˆ' ' ' '
0
ˆ ˆ ˆ ˆ ˆ ˆ' ' ' ' ' 'P
H i A i H i A i
a H i A i H i A i H i A i
Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
16
2 21 2 1 1 2 3
ˆ ˆ2 ' 'Pa H A i H i
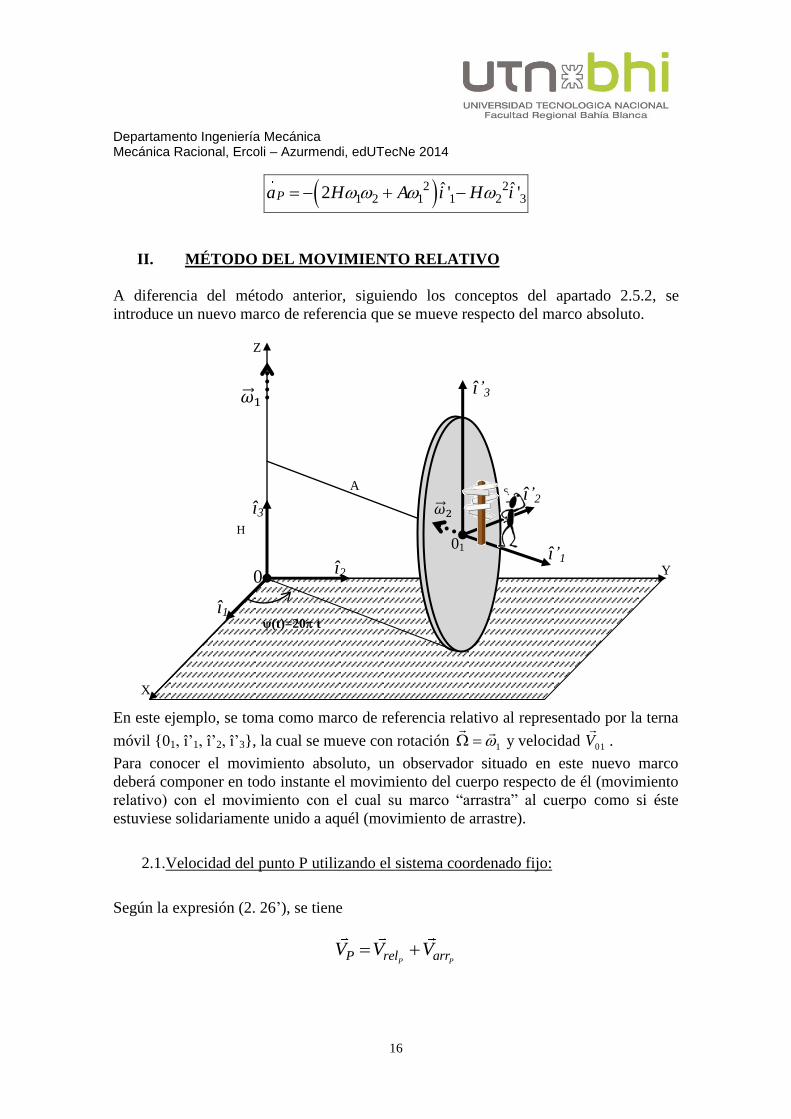
II. MÉTODO DEL MOVIMIENTO RELATIVO
A diferencia del método anterior, siguiendo los conceptos del apartado 2.5.2, se
introduce un nuevo marco de referencia que se mueve respecto del marco absoluto.
En este ejemplo, se toma como marco de referencia relativo al representado por la terna
móvil {01, î’1, î’2, î’3}, la cual se mueve con rotación 1
y velocidad 01V
.
Para conocer el movimiento absoluto, un observador situado en este nuevo marco
deberá componer en todo instante el movimiento del cuerpo respecto de él (movimiento
relativo) con el movimiento con el cual su marco “arrastra” al cuerpo como si éste
estuviese solidariamente unido a aquél (movimiento de arrastre).
2.1.Velocidad del punto P utilizando el sistema coordenado fijo:
Según la expresión (2. 26’), se tiene
P PP rel arrV V V
H
�⃗⃗� 1
î’1
î’2
î’3
Z
X
Y
ψ(t)=20 t
A
0
01
î1
î2
î3 �⃗⃗� 2

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
17
12 0
1 2 3
2 2 2 1 2 2
ˆ ˆ ˆ
ˆ ˆcos 0 cos
0 0
P
P
rel P
rel
V r
i i i
V sen H sen i H i
H
1 1
1 1
1
1
0 1 0
0 1 00
1 2 3
0 1 1 1 1 2
1 2 3
1 0 1
1 1 1 2
2 1 1 2
ˆ ˆ ˆ
ˆ ˆ 0 0 cos
cos
ˆ ˆ ˆ
0 0 0
0 0
ˆ ˆcos
ˆ c
P
P
arr P
P
arr
P
V V r
V r
i i i
V A sen i A i
A Asen H
i i i
r
H
V A sen i A i
V H sen A sen i H
1 2ˆos cosA i
2 1 1 2ˆ ˆcosPV H A sen i i
1 2ˆ ˆ8 cosP
mV sen i i
s
2.2.Velocidad del punto P calculada en el sistema coordenado móvil:
P P
P rel arrV V V
1
1
1 2 3
2 0 2 2 2
01 1 0
ˆ ˆ ˆ' ' '
ˆ0 0 '
0 0P
P
rel P
arr P
i i i
V r H i
H
V V r

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
18
1 1
1
1 2 3
0 1 00 1 1 2
1 2 3
1 0 1
ˆ ˆ ˆ' ' '
ˆ 0 0 '
0
ˆ ˆ ˆ' ' '
0 0 0
0 0
P
i i i
V r A i
A H
i i i
r
H
2 1 2ˆ 'PV H A i
'28P
mV i
s
2.3 Aceleración del punto P calculada en el sistema coordenado fijo:
1
2 2 0 a
P P P
P
P rel arr comp
rel P
a a a a
r
1
1
1 2 3
2 0 2 2 2 1 2 2
1 2 32 2 2 2
2 2 0 2 2 2 3 2 3
2 2
ˆ ˆ ˆ
ˆ ˆ cos 0 cos
0 0
ˆ ˆ ˆ
ˆ ˆ cos 0 cos
cos 0
P
P
i i i
r sen H sen i H i
H
i i i
r sen H i H sen i
H sen H
2 2 2 22 2 3
ˆ a cos sP
rel H H en i

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
19
1 1
2 1 2 1
2 1
01 1 0 1 1 0
01 02 0 0 0 0
02
1 2 3
0 0 1 2 1 2
a
a 0
ˆ ˆ ˆ
cos 0
co
Parr P Pa a r r
a r r
i i i
r sen
A
2 1
2 21 2 3 1 2 3
1 2 3
0 0 2 2 1 1 1 1 2
ˆ ˆcos
s 0
ˆ ˆ ˆ
ˆ ˆ cos cos
cos 0
A sen i A i
Asen
i i i
r sen A sen i A i
A Asen
2 1
1
1
1 2 3 2 21 1 1 2
0 0 2 2 1 2 21 2 3 1 2 3
1 1
11 0
1 1 0
ˆ ˆ ˆˆ ˆcos
cosˆ ˆcos
cos 0
0 porque 0
0
P
P
i i iA i A sen i
r senA i A sen i
A sen A
dr
dt
r
2 21 1 1 2
1 2 3
1 1 2 1 1 2 2
2 2
1 2 1
ˆ ˆ a cos
a 2
ˆ ˆ ˆ
ˆ ˆ 2 0 0 2 2 cos 2
cos 0
ˆ a 2 cos
P
P P
P
P
arr
comp rel
rel
comp
A i A sen i
V
i i i
V H i H sen i
H sen H
H i
1 2 2
2 2 2 2 2 22 2 3 1 1 1 2 1 2 1 1 2 2
ˆ2
ˆ ˆ ˆ ˆ ˆcos cos 2 cos 2P
H sen i
a H H sen i A i A sen i H i H sen i
2 2
1 2 1 1 2 2 3ˆ ˆ ˆ(2 )(cos )Pa H A i sen i H i
2.4 Aceleración del punto P calculada en el sistema coordenado móvil:
1
2 2 0
P P P
P
P rel arr comp
rel P
a a a a
a r

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
20
1
1
1 2 3
2 0 2 2 2
1 2 32
2 2 0 2 2 3
2
ˆ ˆ ˆ' ' '
ˆ 0 0 '
0 0
ˆ ˆ ˆ' ' '
ˆ 0 0 '
0 0
P
P
i i i
r H i
H
i i i
r H i
H
1 1
2 1 2 1
22 3
01 1 0 1 1 0
01 02 0 0 0 0
02
ˆ '
a
a 0
P
P
rel
arr P P
a H i
a a r r
a r r
2 1
2 1
2 1
1 2 3
0 0 1 2 1 2 3
1 2 3
0 0 2 1 2
1 2 32
0 0 2 1 1 1 2 3
1
1 0
ˆ ˆ ˆ' ' '
ˆ 0 0 '
0 0
ˆ ˆ ˆ' ' '
ˆ 0 0 '
0 0
ˆ ˆ ˆ' ' '
ˆ ˆ 0 0 ' '
0 0
i i i
r A i
A
i i i
r A i
A
i i i
r A i A i
A
r
1
1
1
1 1 0
21 1
0 porque 0
0
ˆ a 'P
P
P
arr
d
dt
r
A i

Departamento Ingeniería Mecánica Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
21
1 2 3
1 1 2 1
2
1 2 1
2 22 3 1 1 1 2 1
a 2
ˆ ˆ ˆ' ' '
ˆ 2 0 0 2 2 '
0 0
ˆ a 2 '
ˆ ˆ ˆ' ' 2 '
P P
P
P
comp rel
rel
comp
P
V
i i i
V H i
H
H i
a H i A i H i
2 21 2 1 1 2 3
ˆ ˆ2 ' 'Pa H A i H i
III. CONCLUSIONES FINALES
1) Las expresiones algebraicas y cálculos matemáticos se reducen en forma
apreciable con el uso de una terna móvil elegida convenientemente.
2) Los gráficos de los vectores resultan mucho más sencillos cuando se utiliza la
terna móvil.
3) La utilización de un marco de referencia relativo simplifica sustancialmente los
cálculos
4) Se verifica que los vectores expresados en una y otra terna son los mismos, con
componentes diferentes.

Mecánica Racional, Ercoli – Azurmendi, edUTecNe 2014
Complemento didáctico
CAPÍTULO 2. CINEMÁTICA DEL CUERPO RÍGIDO
EJEMPLO RESUELTO
APLICACIÓN DE LOS MÉTODOS DEL MOVIMIENTO ABSOLUTO Y DEL MOVIMIENTO RELATIVO
ROTACIONES CONCURRENTES
23/07/2015