arranque de motor síncrono
DESCRIPTION
CAPITULOS OSBRE ARRANQUE DE MOTORESTRANSCRIPT
UNIDAD 4 MOTOR SINCRONO
4.1 OPERACIÓN EN ESTADO ESTACIONARIO DE LOS MOTORES SINCRONOS
Un motor síncrono (MS) es un motor de corriente alterna (CA) que tiene como
característica principal que su velocidad es proporcional a la frecuencia del voltaje aplicado
a su estator. La velocidad a la cual gira el rotor del MS es igual a la del campo magnético
giratorio generado por el estator la cual se llama de sincronismo, de aquí el nombre que se
le da al motor. Existen varios tipos de motores síncronos entre los cuales se encuentran: el
MS de imanes permanentes y el MS con devanado de campo
Construcción y operación del motor síncrono
El MS está formada esencialmente por una parte fija llamada estator y una giratoria
llamada rotor. Entre estas dos partes se encuentra un pequeño espacio de aire que se conoce
como entrehierro. En las ranuras del estator se encuentra distribuido el devanado de
armadura trifásico, y en el rotor, según el tipo de motor, se encuentra el devanado de campo
o imanes permanentes.
En la figura 1 se muestra un diagrama de la distribución de los devanados del estator (a,
b, c) y de campo (f ) del MS de rotor cilíndrico. En esta representación se considera que la
máquina es de dos polos y que sus devanados están concentrados en una sola bobina cada
uno, aunque en la práctica los devanados se encuentran distribuidos sinusoidalmente en la
periferia del estator. En la figura también se indican las direcciones de los ejes magnéticos
de las tres fases del estator y el eje magnético del rotor. Los devanados del estator están
distribuidos de manera que sus ejes magnéticos estén desplazados entre si 2π/3 radianes
eléctricos. Las cruces en el diagrama indican que las corrientes entran por esos extremos de
las bobinas y salen por los extremos marcados con un punto.
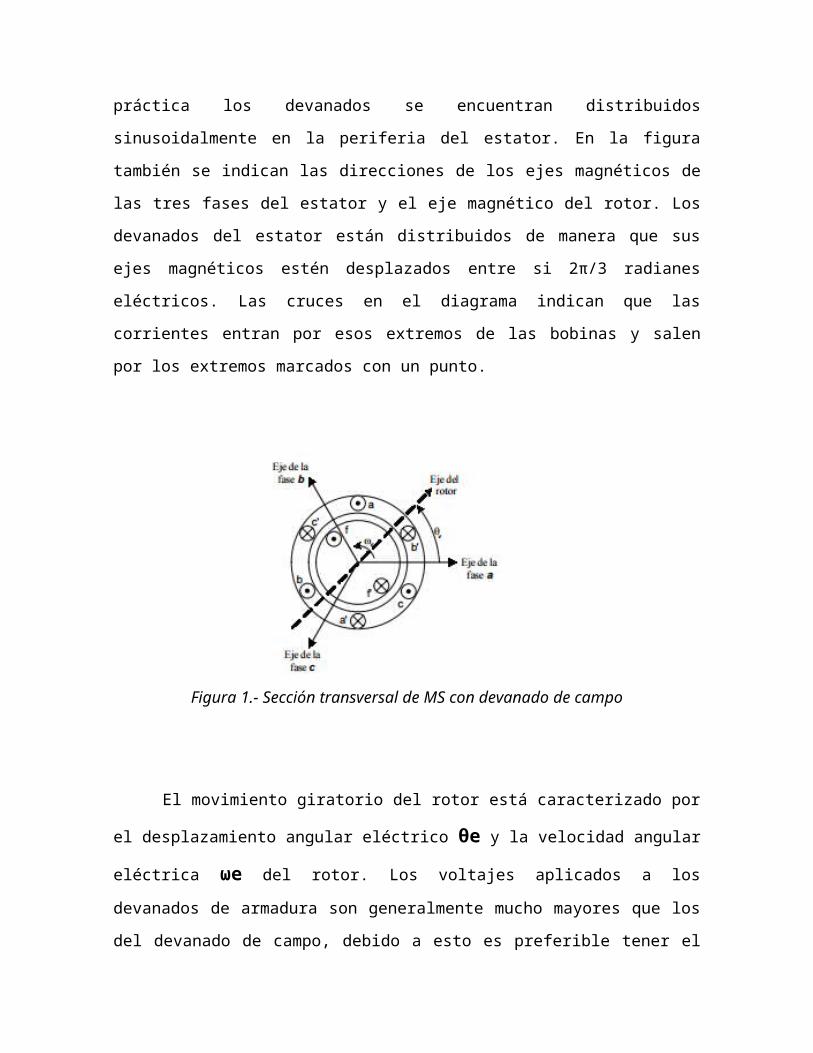
Figura 1.- Sección transversal de MS con devanado de campo
El movimiento giratorio del rotor está caracterizado por el desplazamiento angular
eléctrico θe y la velocidad angular eléctrica ωe del rotor. Los voltajes aplicados a los
devanados de armadura son generalmente mucho mayores que los del devanado de campo,
debido a esto es preferible tener el devanado de armadura fijo para facilitar las conexiones.
El devanado de armadura se alimenta con CA trifásico, mientras que el devanado de campo
se alimenta con corriente directa (CD). En el caso del MS con devanado de campo la
alimentación del rotor se hace generalmente mediante un sistema de dos anillos deslizantes
montados sobre el eje y aislados eléctricamente. La corriente de campo se lleva al rotor a
través de un juego de escobillas que hacen contacto sobre los anillos deslizantes. El rotor
del MS puede ser cilíndrico o de polos salientes.
El devanado de armadura al ser alimentado con CA trifásica genera un campo magnético
giratorio de magnitud constante [Kundur, 1994]. La velocidad de este campo magnético
giratorio en revoluciones por minuto (rpm) está dada por:
ns=120f
p
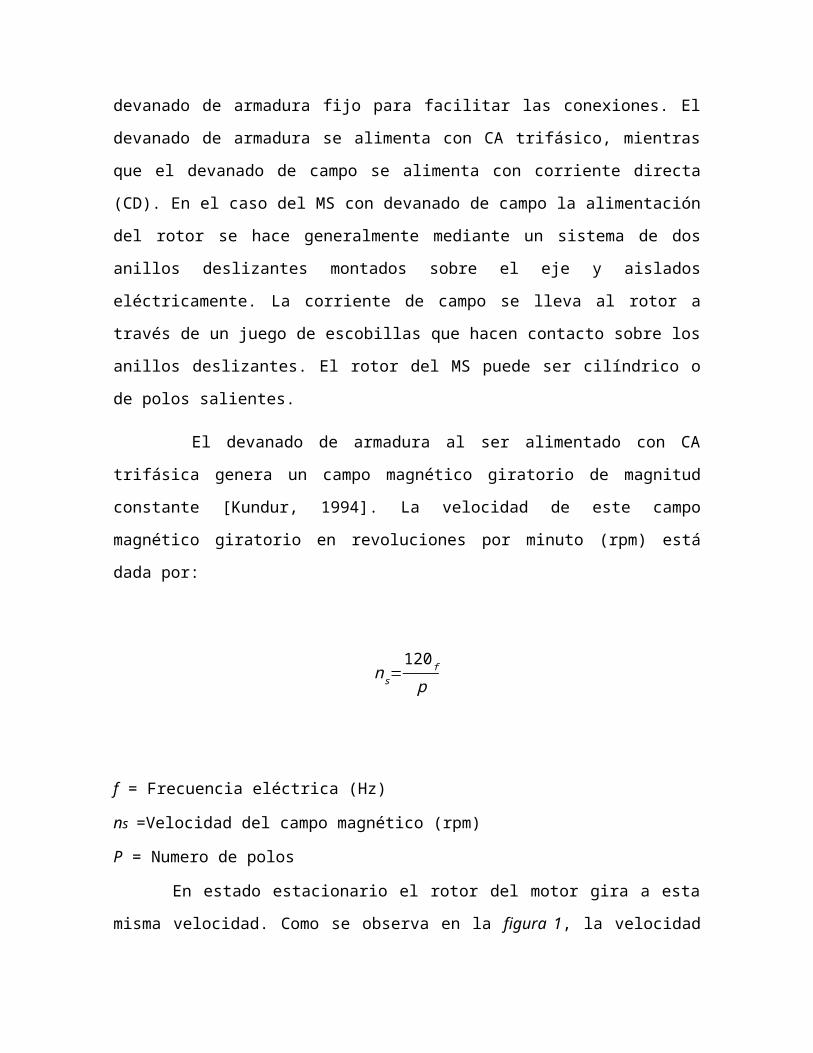
f = Frecuencia eléctrica (Hz)
ns =Velocidad del campo magnético (rpm)
P = Numero de polos
En estado estacionario el rotor del motor gira a esta misma velocidad. Como se observa
en la figura 1, la velocidad depende de la frecuencia del voltaje aplicado a los devanados
del estator y del número de polos, y no del tipo de carga mecánica que mueve. Ya que el
número de polos por construcción es fijo, si la frecuencia del voltaje de armadura se
mantiene constante la velocidad del motor en estado estacionario será constante desde su
operación en vacío hasta la potencia máxima. Si el motor se carga más allá de la potencia
máxima admisible entra en la región de operación inestable y el motor pierde el
sincronismo; esta situación es indeseable.
Los motores síncronos pueden tener uno o varios pares de polos. Los motores síncronos
con pocos pares de polos son de velocidades altas, mientras que los de un gran número de
pares de polos son de baja velocidad. El devanado de campo se distribuye de tal manera
que se alternen magnéticamente las polaridades norte y sur en el rotor. Algunos análisis en
este trabajo de tesis se hacen para un motor con un único par de polos, sin embargo los
resultados pueden extrapolarse a motores con más de un par de polos. Cuando el número de
pares de polos np es diferente de uno, el desplazamiento angular eléctrico θe, no es igual al
desplazamiento angular mecánico del motor θm, sin embargo estos están relacionados.
Esta última expresión es muy importante ya que generalmente el valor que se puede
medir es el desplazamiento mecánico θ . e p θ = n θ m m y en el modelo del subsistema
eléctrico el que interviene es el desplazamiento eléctrico θe. Una de las principales
características del MS con devanado de campo es el poder operar con distintos factores de
potencia, a diferencia del motor de inducción tipo jaula de ardilla que opera
invariablemente en retraso. Así se puede tener un MS funcionando con factor de potencia
en atraso, adelanto o unitario. El factor de potencia al cual opera el motor se puede
modificar variando el voltaje de CD aplicado al devanado de campo.
Determinación del circuito equivalente del motor síncrono
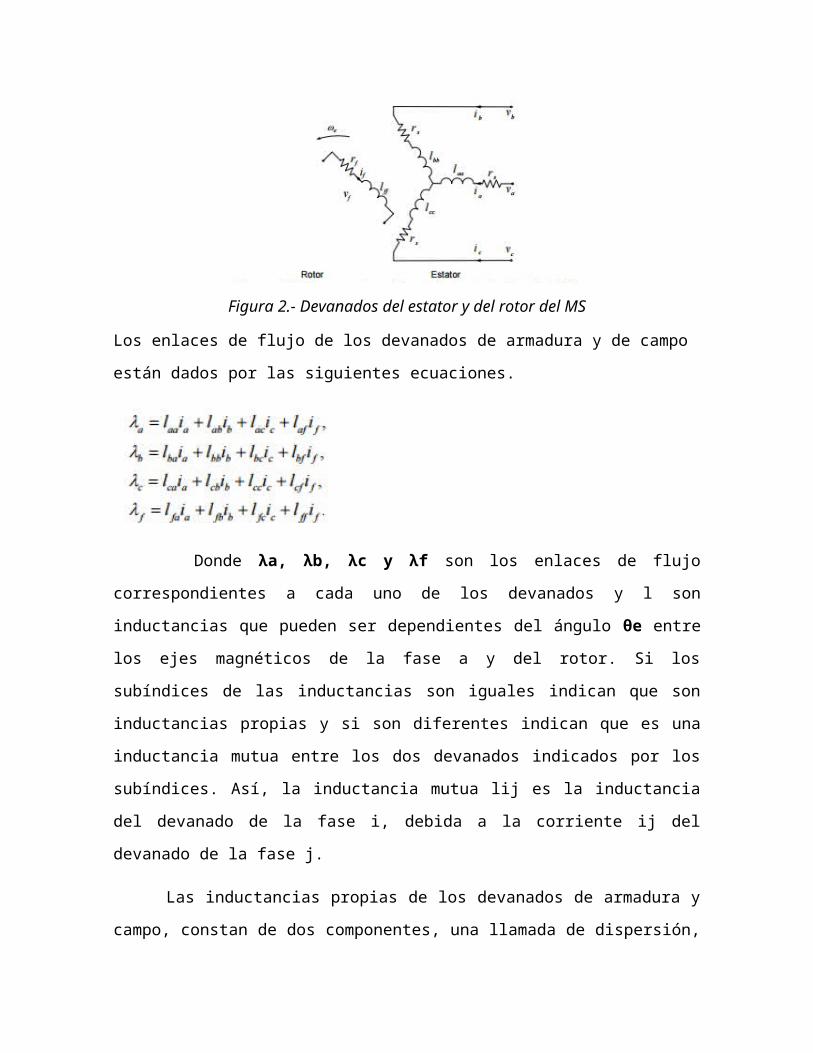
El devanado trifásico de armadura puede conectarse en estrella o en delta.
Independientemente de la conexión cada devanado se representa por una resistencia y una
inductancia, como se muestra en la figura 2 Los devanados del estator por ser simétricos
tienen igual resistencia, rs, y el devanado del rotor tiene una resistencia rf. ia, ib, ic e if son
las corrientes en los devanados y va, vb, vc y vf son los voltajes aplicados a cada fase del
estator.
Figura 2.- Devanados del estator y del rotor del MS
Los enlaces de flujo de los devanados de armadura y de campo están dados por las
siguientes ecuaciones.
Donde λa, λb, λc y λf son los enlaces de flujo correspondientes a cada uno de los
devanados y l son inductancias que pueden ser dependientes del ángulo θe entre los ejes
magnéticos de la fase a y del rotor. Si los subíndices de las inductancias son iguales indican
que son inductancias propias y si son diferentes indican que es una inductancia mutua entre
los dos devanados indicados por los subíndices. Así, la inductancia mutua lij es la
inductancia del devanado de la fase i, debida a la corriente ij del devanado de la fase j.
Las inductancias propias de los devanados de armadura y campo, constan de dos
componentes, una llamada de dispersión, debida precisamente al flujo disperso en el propio
devanado y la otra llamada de magnetización, debida a la componente del flujo de
magnetización causada por ese devanado. Así para el devanado del rotor tenemos que su
inductancia propia se descompone de la siguiente manera:
lff =Lff=Lffl+ Lffo
Lffl es la componente de dispersión y Lff0 es la componente de magnetización. Dichas
componentes son independientes del tiempo. El empleo de la letra L indica que la
inductancia es independiente de θe. En el estator debido a la construcción simétrica de sus
devanados las inductancias propias son de igual valor y están dadas por:
laa=lbb=lcc=Laa=Laal=Laao
En cuanto a las inductancias mutuas, estas se encuentran en función del coseno del ángulo
entre los ejes magnéticos de los devanados involucrados. Por tanto las inductancias mutuas
entre los devanados del estator son de valor constante, ya que el ángulo entre los ejes
magnéticos de dos devanados cualesquiera del estator es fijo e igual a 2π/3 radianes
eléctricos. Por la simetría de construcción del estator del MS, las inductancias mutuas entre
los devanados del estator son iguales a:
lab=lbc=lac=lba=lcb=lca=Laao=cos( 23
π¿)=−12
=Laao¿
Figura 3.- Sistemas de voltaje trifásicos balanceados
Este sistema de voltajes está dado por las siguientes ecuaciones:
Donde Vm es la amplitud máxima de estos voltajes.
Operación del motor síncrono en estado estacionario
Cuando se tiene un circuito eléctrico lineal operando en estado permanente donde sus
fuentes de voltaje o corriente son de una frecuencia única, toda corriente o voltaje en el
circuito se puede determinar completamente por su amplitud máxima y su ángulo de fase
[Fitzgerald, 1996]. El concepto de fasor nos ayuda a representar una función senoidal por
medio de un número complejo en forma polar. Así por ejemplo los voltajes descritos por
(2.8) podríamos describirlos por los siguientes números complejos:
va=vm<0
vb=vm←23
π
vc=vm← 43
π
Para realizar la transformación a fasores de las corrientes y enlaces de flujo se sigue un
procedimiento similar al de los voltajes. También existe una transformación para los
elementos pasivos resistencia R, inductor L y capacitor C. Las resistencias pasan igual al
hacer la transformación del dominio del tiempo al dominio de la frecuencia y viceversa. Un
inductor L al pasar al dominio de la frecuencia como XL=ωL, lo que se conoce como
reactancia inductiva. Un capacitor C al pasa al dominio de la frecuencia como XC=-1/ωC,
que es la reactancia capacitiva. Ambas reactancias, inductiva y capacitiva, cumplen con Vˆ
= X , donde V son el voltaje y la corriente en el elemento, ambos en el dominio de la
frecuencia.
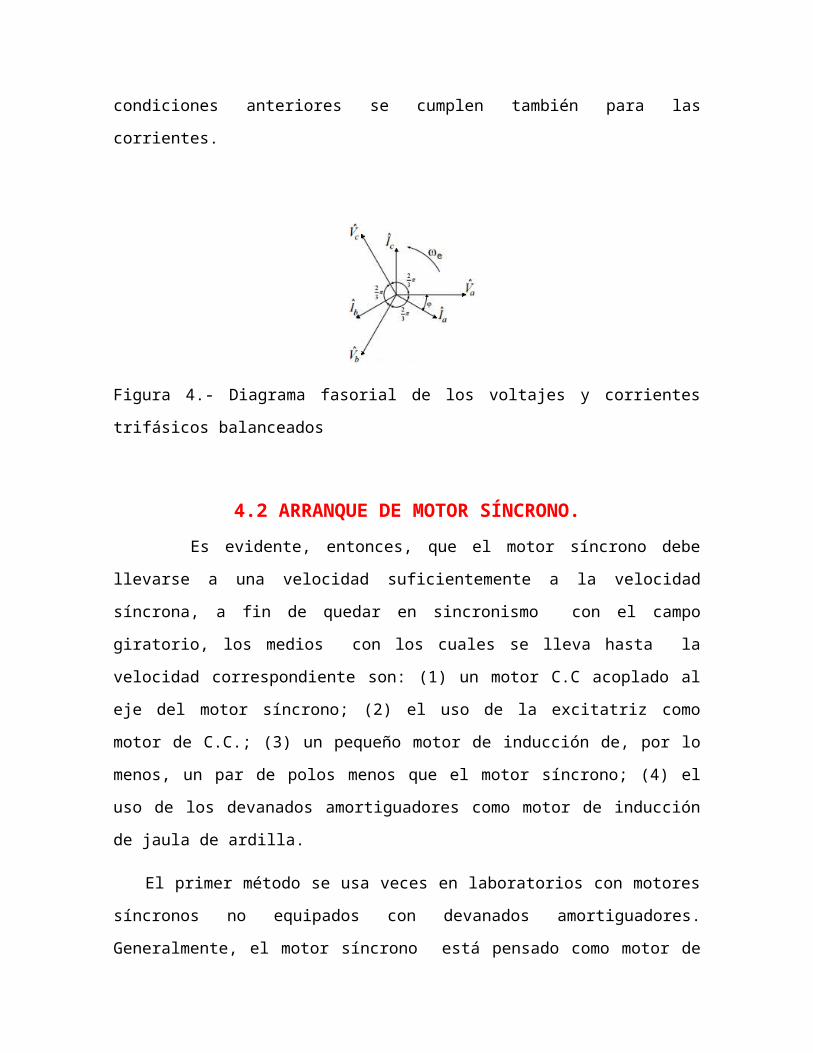
Para obtener una representación gráfica de los voltajes y corrientes en un circuito se
emplean los diagramas fasoriales. Un diagrama fasorial es una gráfica en el plano complejo
de los voltajes y las corrientes. El diagrama fasorial de los voltajes y corrientes trifásicos
balanceados del motor se muestra en la figura 4, se observa que el valor máximo de los 3
voltajes es igual y que el defasamiento entre uno de los voltajes con los otros dos es de
2π/3. Estas dos condiciones anteriores se cumplen también para las corrientes.
Figura 4.- Diagrama fasorial de los voltajes y corrientes trifásicos balanceados
4.2 ARRANQUE DE MOTOR SÍNCRONO.
Es evidente, entonces, que el motor síncrono debe llevarse a una velocidad
suficientemente a la velocidad síncrona, a fin de quedar en sincronismo con el campo
giratorio, los medios con los cuales se lleva hasta la velocidad correspondiente son: (1) un
motor C.C acoplado al eje del motor síncrono; (2) el uso de la excitatriz como motor de
C.C.; (3) un pequeño motor de inducción de, por lo menos, un par de polos menos que el
motor síncrono; (4) el uso de los devanados amortiguadores como motor de inducción de
jaula de ardilla.
El primer método se usa veces en laboratorios con motores síncronos no equipados con
devanados amortiguadores. Generalmente, el motor síncrono está pensado como motor de
accionamiento de velocidad constante de velocidad constante para el generador de C.C.
Pero para llevar el motor a sincronismo, el generador de CC se hace de C.A (apartado 7-16)
como alternador. Una vez en paralelo con la alimentación, la maquina síncrona funciona

como motor. El motor de C.C no actuara como generador si su corriente de excitación
aumenta de manera que su FEM generada sea mayor que la tensión en barras de C.C.
El segundo método es realmente igual que el primero, excepto que la excitatriz (un
generador derivación de C.C) se hace funcionar como motor y la maquina síncrona de C.A
esta sincronizada a la fuente C.A.
El tercer método en el cual se usa un motor de inducción auxiliar con menos polos,
implica el mismo procedimiento de sincronización para el motor síncrono de C.A que un
alternador. Se necesita como mínimo un par de polos menos en un motor de inducción para
compensar la pérdida de velocidad del motor de inducción debido al deslizamiento.
En los tres métodos mencionados anteriormente, es necesario, (1) que haya poca o
ninguna carga sobre el motor síncrono. (2) que la capacidad del motor de arranque (c.c o
c.a).esta comprendía entre el 5 y 10 % de la potencia nominal de motor síncrono acoplado a
él.
En dicha sección siempre se supuso que inicialmente el motor giraba a "velocidad de
sincronismo. Lo que aún no se ha estudiado es la pregunta: como llego el motor a alcanzar
la velocidad de sincronismo en primer lugar?
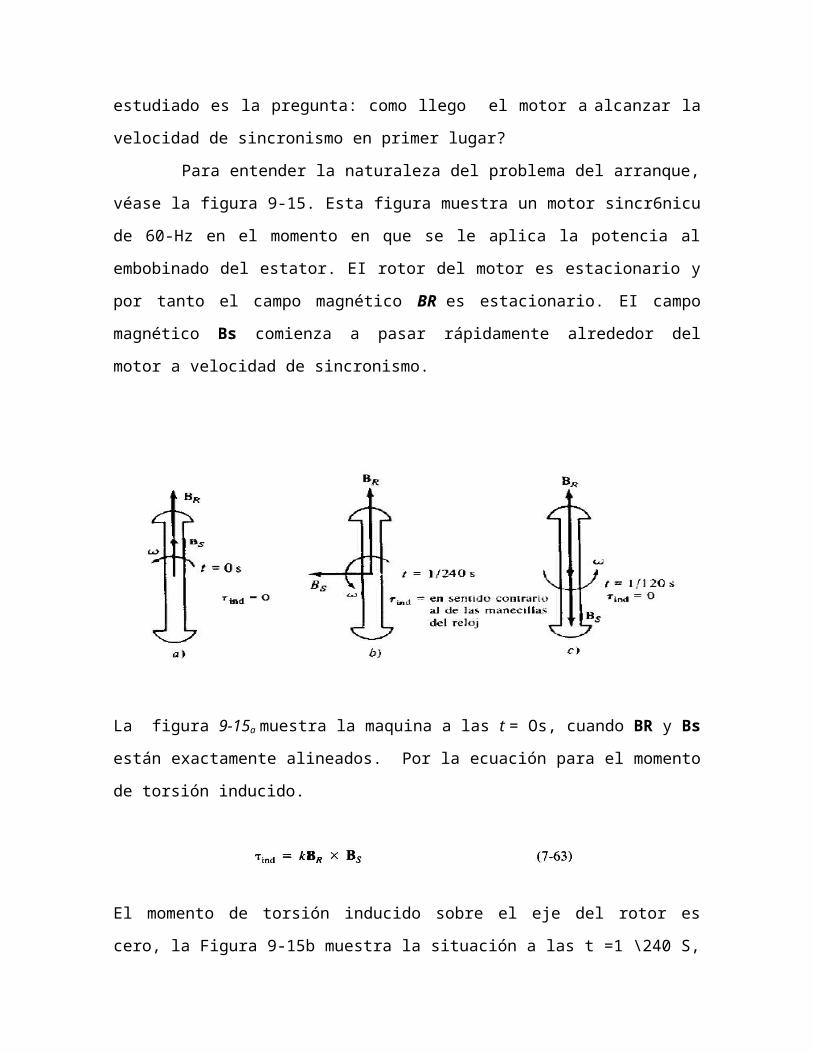
Para entender la naturaleza del problema del arranque, véase la figura 9-15. Esta figura
muestra un motor sincr6nicu de 60-Hz en el momento en que se le aplica la potencia al
embobinado del estator. EI rotor del motor es estacionario y por tanto el campo magnético
BR es estacionario. EI campo magnético Bs comienza a pasar rápidamente alrededor del
motor a velocidad de sincronismo.
La figura 9-15a muestra la maquina a las t = Os, cuando BR y Bs están exactamente
alineados. Por la ecuación para el momento de torsión inducido.
El momento de torsión inducido sobre el eje del rotor es cero, la Figura 9-15b muestra la
situación a las t =1 \240 S, En tan corto tiempo, el rotor escasamente se ha movido, pero el
campo magnético del estator ahora señala hacia la izquierda. Por la ecuación del momento
de torsión inducido, el momento de torsión sabré el eje del rotor está ahora en dirección
contraria al sentido de las manecillas del reloj. La figura 9-15c muestra la situación a las t=
2/240 S. En esa punta BR y Bs señalan en dirección contraria y Tind es igual a cero
nuevamente. A las t= 3/240 S, el campo magnético del estator apunta ahora a la derecha y
el momento de torsión resultante está en el sentido de las manecillas del reloj.
Por último, a las t = 4/240 S, el campo magnético del estator esta nuevamente alineado
con el campo magnético del rotor y Tind = 0. Durante un ciclo eléctrico, el momento de
torsión primero estuvo en el sentido contrario al de las manecillas del reloj y luego en el
mismo sentido y el momento de torsión promedio durante el ciclo completo fue cero. Lo
que le sucede al motor es que vibra fuertemente con cada ciclo eléctrico y finalmente se
recalienta.
Aproximación al arranque del motor sincrónico difícilmente se considera satisfactorio.
Los gerentes tienden a molestarse con los empleados que queman los equipos costosos.
Entonces. ¿Cómo puede arrancarse un motor sincrónico?
Tres métodos básicos pueden usarse para arrancar un motor sincrónico en forma segura:
1.- Reducir la velocidad del campo magnético del estator hasta un valor suficientemente
bajo como para que el rotor se pueda acelerar y enganchar con él durante medio ciclo de
rotación del campo magnético. Esto se puede hacer reduciendo la frecuencia de la potencia
eléctrica.
2. Usar un motor primario externo para acelerar el motor sincrónico hasta la velocidad de
sincronismo, seguir el procedimiento para ponerlo en paralelo y poner la maquina en línea
como un generador. Luego, al apagar a desconectar el motor primario harán de la maquina
sincr6nica, un motor.
3. Usar embobinados amortiguadores. La función de los embobinados amortiguadores y su uso en el arranque de motores se describirá mas adelante.
Arranque del motor reduciendo la frecuencia eléctrica.
Si los campos magnéticos del estator de un motor sincrónico giran a una velocidad suficientemente baja, no habrá problema para que el rotor acelere y se enganche con el campo magnético del estator. La velocidad de los campos magnéticos del estator puede, entonces, incrementarse hasta obtener la velocidad de funcionamiento, aumentando gradualmente fe hasta su valor normal a 50- 0 60-Hz.
Esta forma de arrancar de los motores sincrónicos tiene mucho sentido, pero tiene un grave problema: ¿cómo se obtiene la frecuencia eléctrica variable?
Los sistemas de potencia normales están cuidadosamente graduados a 50 0 60 Hz Ys610 hasta hace poco cualquier fuente de voltaje de frecuencia variable tenía que provenir de un generador exclusivo para esto. Tal situaci6n era obviamente nada práctica, excepto para circunstancias poco usuales.
Hoy, las cosas han variado. En el capítulo 3 se describieron el rectificador-inversor y el ciclo convertidor, que pueden ser utilizados para convertir frecuencia constante de entrada en cualquier frecuencia de salida requerida. Con el desarrollo de tales accionamientos modernos de estado sólido para el manejo de la frecuencia variable es perfectamente posible controlar completa y continuamente la frecuencia eléctrica aplicada al motor, desde una fracción de hertzio hasta la frecuencia nominal total y aun por encima de ella. Si tal unidad de manejo de frecuencia variable se incluye en un circuito de control de motor para lograr control de velocidad, entonces arrancar el motor sincrónico es muy fácil: sencillamente se gradúa la frecuencia en un valor muy bajo para arrancar y luego se eleva hasta la frecuencia de funcionamiento para que opere normalmente.
Cuando un motor sincrónico se opera a una velocidad menor que la nominal, su voltaje generado íntimamente EA = K<Kωw Sera menor que el normal. Menor que el nominal. Si EA se reduce en magnitud, entonces la tensión aplicada en los bornes del motor, se debe reducir en la misma forma para mantener la corriente del estator en niveles seguros. El voltaje en cualquier accionamiento de frecuencia variable 0 circuito arrancador de frecuencia variable, de manera general, debe cambiar linealmente con la frecuencia aplicada. Para aprender más sobre tales unidades de estado sólido, para el accionamiento de motores, revise el capítulo 3 y las referencias 5 y 8.
Arranque del motor con un motor primario externo.El segundo método para arrancar un motor sincrónico es acoplarlo a un motor de arranque externo y poner y la maquina sincrónica a velocidad plena con el motor extremo. Entonces, la maquina sincr6nica puede colocarse como generador en paralelo con el sistema de potencia externo y el motor de arranque puede desacoplarse del eje de la máquina.
Una vez que el motor de arranque se apaga, el eje de la maquina desacelera, el campo magnético del rotor BR cae por deltas de Bneto y la maquina sincrónica comienza a andar como motor. Cuando finaliza la conexi6n en paralelo, el motor puede cargarse en la forma acostumbrada.
Todo este procedimiento no es tan absurdo como suena, puesto que muchos motores sincr6nicos hacen parte de conjuntos de motor-generador y la máquina de dicho conjunto, se puede arrancar can la otra que sirve como motor de arranque. Además, el motor de arranque necesita sobreponerse a la inercia de la maquina sincr6nica en vacío; no se le acopla ninguna carga hasta que el motor se conecte en paralelo al sistema de potencia. Como solamente se debe vencer la inercia del motor, el motor de arranque puede tener un valor nominal mucho menor que el del motor sincrónico que arranca.
Como la mayor parte de los motores sincrónicos grandes tienen sistemas de excitaci6n sin escobillas montados sobre sus ejes, can frecuencia se pueden utilizar estas excitatrices como motores de arranque.
Figura 9-16.- masa polar de campo del rotor de una maquina sincrónica que muestra los embobinados amortiguadores, en la cara polar.
Para muchos motores sincrónicos, desde tamaños medianos hasta grandes, un motor de arranque externo 0 el uso de la excitatriz puede ser la única soluci6n posible para arrancar, porque el sistema de potencia al que están conectados puede no ser capaz de manejar la corriente de arranque necesaria para poder usar el método de los embobinados de amortiguación, que se describe enseguida.
Arranque del motor por medio de embobinados de amortiguación.
La forma más popular de arrancar un motor sincrónico es usando los embobinados
amortiguadores. Estos son barras especiales colocadas en ranuras colocadas sobre la cara
del rotor del motor sincrónico y puestas luego en corto en cada extremo, por un anillo de
corto. La cara polar, con juego de embobinados amortiguadores, se muestra en la figura 9-
16 y en las figuras 8-2 a 8-4 se y en algunos embobinados amortiguadores.
Para entender lo que un juego de embobinados hace en un motor sincrónico, estudie el rotor
estilizado de dos polos salientes que se ve en la figura 9- I7.
Este rotor muestra un embobinado amortiguador, con las barras de cortocircuito en los
extremos de las caras del rotor de dos polos, conectados por alambres. (Esta no es
exactamente la forma como las maquinas normales se construyen, pero servirá para ilustrar
el punto de los embobinados).
Suponga inicialmente que el embobinado principal de ('ampo del rotor esta desconectado y
que un sistema trifásico de voltajes se aplica al estator de esta máquina. Cuando al principio
se suministra potencia a las t = 0, suponga que el campo magnético Bs es vertical. se ve en
la figura 9-18a. Como el campo magnético Bs., pasa rápidamente a lo largo, en una
dirección contrata al sentido de las manecillas del reloj, se induce un voltaje en las barras
del embobinado amortiguador, el cual viene dado por
FIGURA 9-17. Diagrama simplificado de una máquina de dos polos salientes, que se muestra lo embobinados amortiguados.
En donde v= velocidad de la barra relativa el campo magnético. B= densidad de flujo magnético I= longitud de la barra.
Las barras en la parte superior del rotor se están moviendo hacia la derecha con relaci6n at campo magnético, así que la dirección resúltame del voltaje inducido esta hacia fuera de la página. De modo similar, el voltaje inducido esta hacia adentro de la página, en las. Barras inferiores. Estos voltajes producen un flujo de corriente hacia afuera en las barras superiores y hacia adentro en las inferiores, resultando un campo magnético del embobinado B", que señala hacia la derecha. De la ecuación del momento inducido.
El momento de torsión resultante en las barras (y el rotor) es contrario at sentido de las manecillas del reloj.
4.3 VALORES NOMINALES
4.4 MODELADO DE LA MAQUINA