técnicas de compensacion
TRANSCRIPT

Control
CompensaciónMONTIEL ROMERO LUIS 08360629LOPEZ ROMAN PEDRO F. 08360621FRANCO RAMIREZ JUAN MANUEL 08360604SALAZAR MARCELO EDGAR 08360648ROJAS VELAZQUEZ KENNETH A. 08360644AMBROCIO VALIENTE OSCAR A. 08360582
TÉCNICAS DE COMPENSACIÓN¿Dónde se aplican?Son Técnicas para sistemas SISO invariantes en el tiempo, basadas en el lugar de las raíces y respuesta en frecuencia
¿Para que sirve la compensación de señales?● Exactitud o precisión● Estabilidad relativa● Velocidad de respuesta
COMPENSACIÓN EN SERIE Y PARALELO
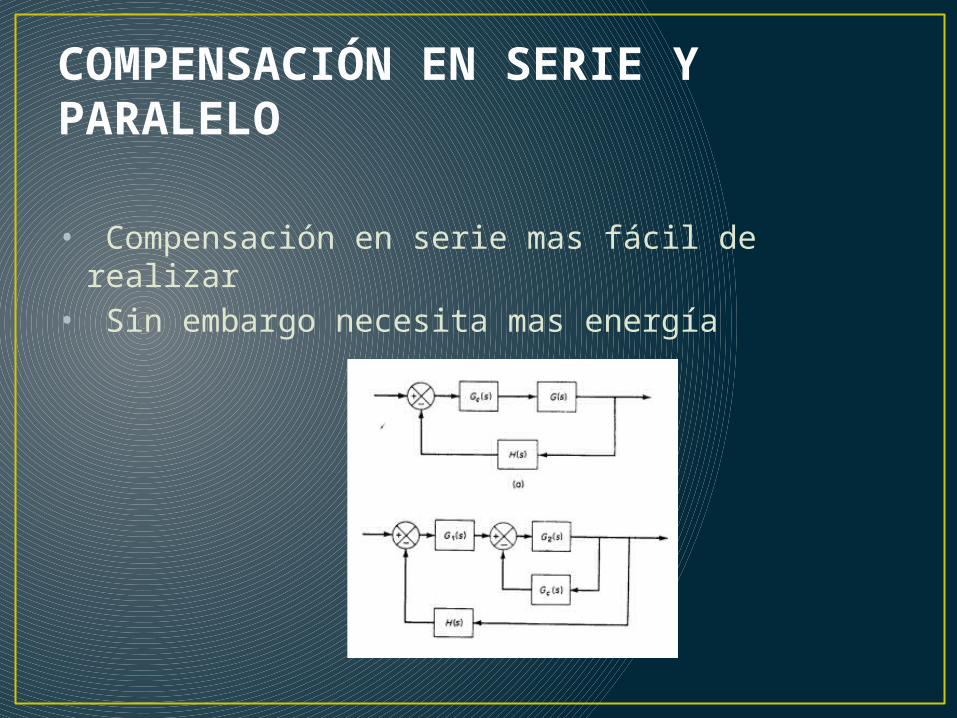
• Compensación en serie mas fácil de realizar• Sin embargo necesita mas energía
COMPENSADORES:• Dispositivos físicos (eléctricos, neumáticos,
mecánicos, etc. que se comportan según una función de transferencia deseada).
Tipos de compensadores:• red de adelanto• red de atraso• red de atraso-adelanto
CARACTERÍSTICAS DE LOS TIPOS DE COMPENSACIÓN Adelanto: Mejora la respuesta transitoria y
modifica unpoco la exactitud en estado estacionario. Puede acentuar los efectos del ruido a altas frecuencias. Atraso: Mejora la precisión a expensas de un
aumentodel tiempo de la respuesta transitoria. Suprime los efectos de los ruidos a altas frecuencias. Atraso-adelanto: Comparte características de los
dos tipos pero aumenta la complejidad del sistema.
COMPENSACIÓN DE SISTEMAS
Compensación de ganancia (OPAM´S)■ La forma mas sencilla de modificar el comportamientodel sistema■ Si con ajuste de ganancia no se logra las especificaciones(algunas veces el aumentar la ganancia para mejorar elcomportamiento estacionario conlleva una pobre estabilidad) es necesario introducir un bloque compensador
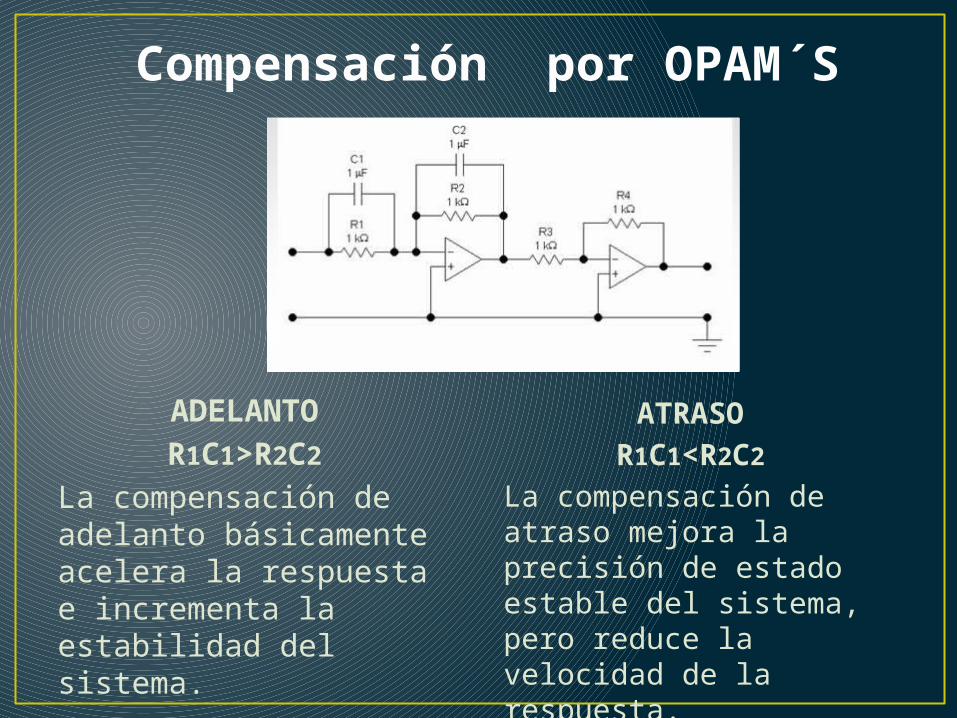
Compensación por OPAM´S
ADELANTOR1C1>R2C2
La compensación de adelanto básicamente acelera la respuesta e incrementa la estabilidad del sistema.
ATRASOR1C1<R2C2
La compensación de atraso mejora la precisión de estado estable del sistema, pero reduce la velocidad de la respuesta.

COMPENSACION ADELANTO-ATRASO• La compensación de adelanto básicamente acelera la respuesta e
incrementa la estabilidad del sistema. La compensación de atraso mejora la precisión de estado estable del sistema, pero reduce la velocidad de la respuesta.
• Si se desea mejorar tanto la respuesta transitoria como la respuesta de estado estable, debe usarse en forma simultánea un compensador de adelanto y un compensador de atraso. Sin embargo, en lugar de introducir un compensador de adelanto y un compensador de atraso, ambos como elementos separados, es más económico sólo usar un compensador de atraso-adelanto.
Compensación por OPAM´S
METODO LGR (LUGAR GEOMETRICO DE LAS RAICES)
• En la práctica, una gráfica de LGR de un sistema indica que el desempeño deseado no puede obtenerse con sólo el ajuste de la ganancia. De hecho, en algunos casos, tal vez el sistema no sea estable para todos los valores de ganancia. En este caso, es necesario volver a construir los lugares geométricos de la raíces para cumplir con las especificaciones de desempeño.
METODO LGR (LUGAR DE LAS RAICES)CONSIDERACIONES PRELIMINARES
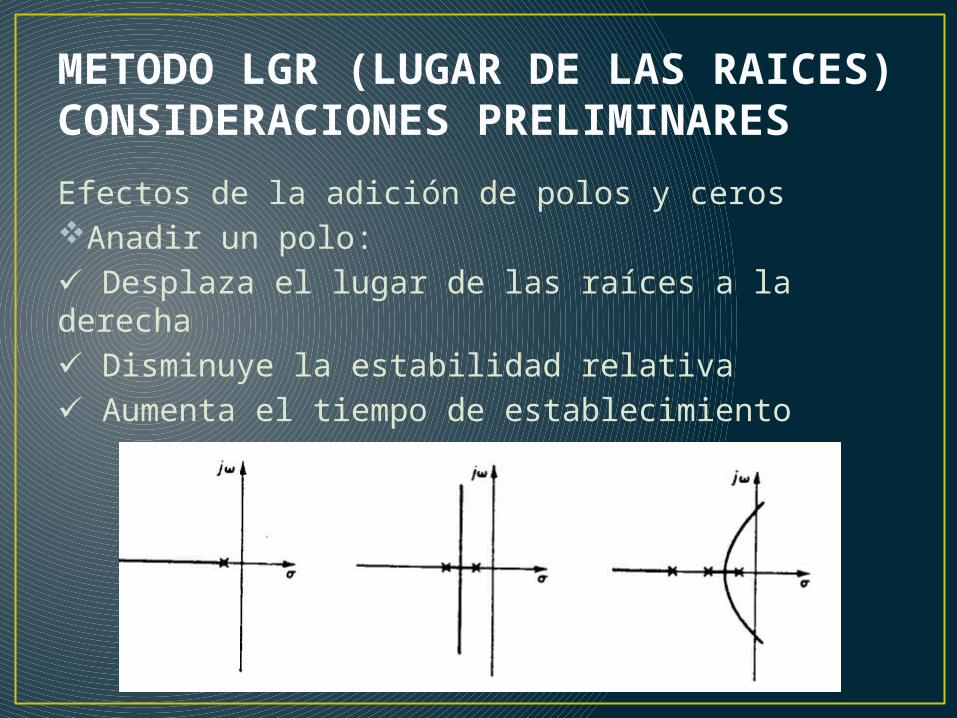
Efectos de la adición de polos y cerosAnadir un polo: ✓ Desplaza el lugar de las raíces a la derecha✓ Disminuye la estabilidad relativa✓ Aumenta el tiempo de establecimiento
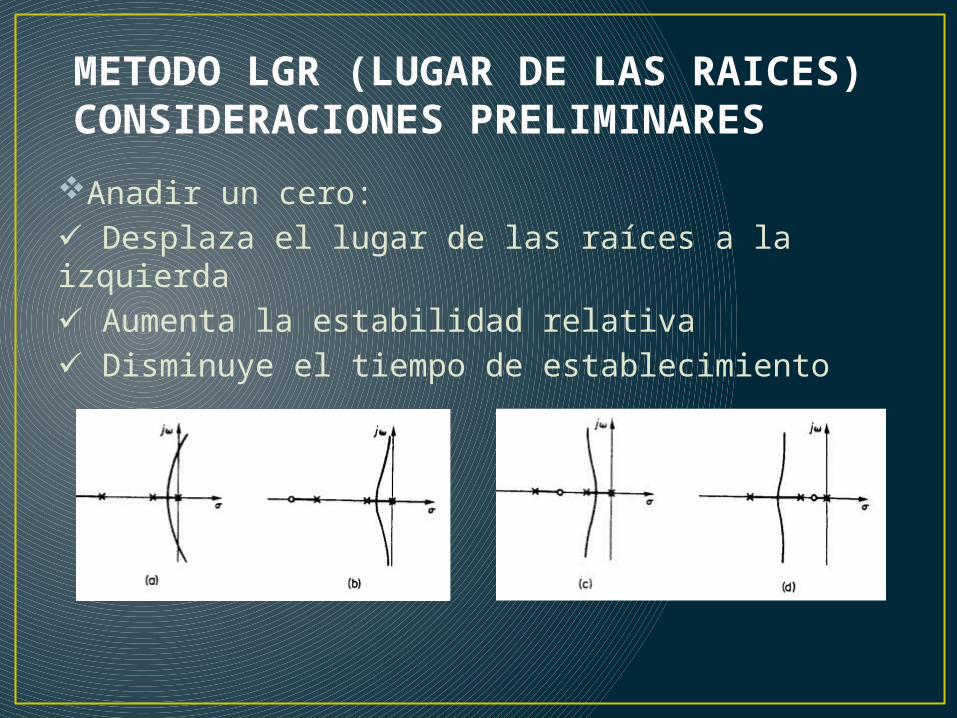
METODO LGR (LUGAR DE LAS RAICES) CONSIDERACIONES PRELIMINARES
Anadir un cero: ✓ Desplaza el lugar de las raíces a la izquierda✓ Aumenta la estabilidad relativa✓ Disminuye el tiempo de establecimiento
COMPENSADOR EN ADELANTO MEDIANTE LUGAR DE LAS RAICES
• Un compensador en adelanto en la forma de mapa polo-cero está dado por:
• Donde la magnitud de zo es menor que la magnitud de po. Un compensador por adelanto tiende a desplazar el lugar de raíces hacia el semiplano izquierdo. Esto resulta en una mejora en la estabilidad del sistema y un incremento en la velocidad de respuesta.
COMPENSADOR EN ATRASO MEDIANTE LUGAR DE LAS RAICES
• Un compensador en atraso en la forma de mapa polo-cero está dado por:
• Donde la magnitud de zo es mayor que la magnitud de po. Un compensador en atraso de fase tiende a desplazar el lugar de raíces a la derecha, lo cual es indeseable. Por esta razón, el polo y cero de un compensador en atraso deben ser ubicados muy juntos (normalmente cerca del origen) de modo que no cambie apreciablemente las características de respuesta transitoria o estabilidad del sistema.
COMPENSADOR EN ADELANTO MEDIANTE RESPUESTA DE FRECUENCIA
• Un compensador en adelanto en la forma respuesta en frecuencia está dada por:
• La ecuación que determina la máxima fase es:
• Una fase positiva adicional incrementa el margen de fase y por lo tanto incrementa la estabilidad del sistema. Este tipo de compensador se diseña determinando a de la cantidad de fase necesaria para satisfacer el requerimiento del margen de fase, y determinando T donde ubicar la fase adicionada a la nueva frecuencia de cruce de ganancia.
COMPENSADOR EN ATRASO MEDIANTE RESPUESTA DE FRECUENCIA
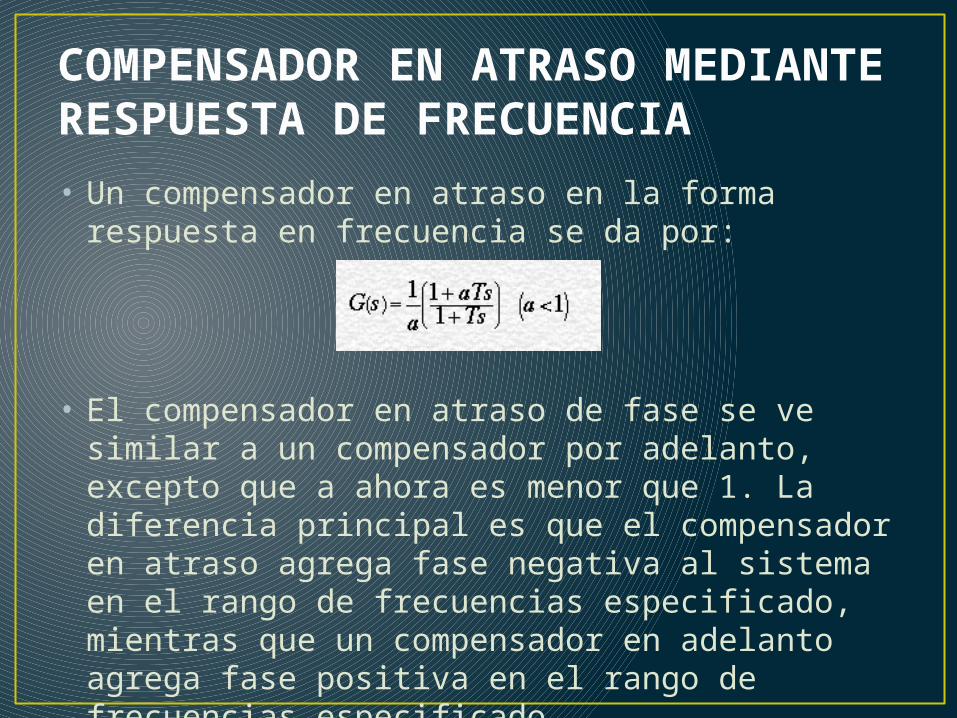
• Un compensador en atraso en la forma respuesta en frecuencia se da por:
• El compensador en atraso de fase se ve similar a un compensador por adelanto, excepto que a ahora es menor que 1. La diferencia principal es que el compensador en atraso agrega fase negativa al sistema en el rango de frecuencias especificado, mientras que un compensador en adelanto agrega fase positiva en el rango de frecuencias especificado.
COMPENSADOR EN ADELANTO/ATRASO MEDIANTE LUGAR DE RAÍCES O RESPUESTA EN FRECUENCIA
• Un compensador en Adelanto/Atraso combina los efectos de un compensador en adelanto con los de un compensador en atraso. El resultado es un sistema con una mejora en la respuesta transitoria, estabilidad y error de estado estacionario. Para implementar un compensador en adelanto/atraso, primero se diseña el compensador en adelanto para lograr la respuesta transitoria y estabilidad deseadas, y entonces agregue un compensador en atraso para mejorar la respuesta de estado estacionario.