reporte tÉcnicotesis.ipn.mx/jspui/bitstream/123456789/10047/1/33.pdf · 2020. 11. 11. · reporte...
TRANSCRIPT

INSTITUTO POLITECNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL ZACATENCO “ADOLFO LÓPEZ MATEOS”
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
REPORTE TÉCNICO PROYECTO DE INVESTIGACIÓN SIP-20101542
“IMPLEMENTACIÓN DE UN CONTROL INTELIGENTE PARA REGULAR LA INTENSIDAD LUMINOSA DE UNA LÁMPARA”
PARA OBTENER EL TÍTULO DE INGENIERO ELECTRICISTA
PRESENTAN:
CIPRES SIGUENZA ROBERTO
LOZADA RUIZ HECTOR ALONSO
MEJIA BANDA CESAR ALEJANDRO
ASESORES:
M. EN C. HERRERA ESPINOSA JAVIER
M. EN C. GARCÍA LÓPEZ MANUEL


Ingeniería Eléctrica.
ii
Agradecimientos
Este trabajo va dedicado a todas aquellas personas que colaboraron para su
realización. A nuestros familiares y profesores que nos apoyaron de alguna manera a
lo largo de esta carrera, así como su colaboración en el desarrollo de nuestra tesis.
Al Instituto Politécnico Nacional, y en especial a la ESIME Zacatenco, porque en
esta institución nos hemos forjado como profesionistas.
Al M. en C. Javier Herrera Espinosa asesor de la tesis, por todo su apoyo y su
disposición para transmitirnos sus conocimientos, sin los cuales este trabajo no
hubiera sido posible.
Al M. en C. Manuel García López asesor de la tesis, por el apoyo brindado en la
realización de las pruebas de laboratorio y sus experiencias necesarias para la
terminación de la tesis.
Al Ing. Guillermo Basilio Rodríguez. Por ayudarnos en la selección del tema de esta
tesis.
Al Ing. David Hernández Ledesma. Por bridarnos el laboratorio de iluminación para
realizar las pruebas.

Ingeniería Eléctrica.
iii
Cipres Siguenza Roberto
Esta tesis es un pequeño reconocimiento al trabajo, a la entrega y la dedicación de
quienes me han apoyado; ahora que egreso como ingeniero saben que sus desvelos
y sacrificios no han sido en vano.
Agradezco a mi Madre Roberta Sigüenza Resendiz; por su cariño, por su
comprensión y sus consejos que me permitieron seguir adelante y es la parte
esencial de este logro.
A mi Hermano: Julio Cesar Cipres Sigüenza, por su apoyo moral a lo largo de mi
formación profesional, y por ser un gran amigo.
A mis asesores M. en C. Javier Herrera Espinosa y M. en C. Manuel García López
por su apoyo y dirección, para la realización de este trabajo .
A mis compañeros de tesis que con dedicación y esfuerzo hemos llevado a buen
término este trabajo, gracias.
Agradezco también al M. en C. David Hernández Ledesma por las facilidades
prestadas en el laboratorio de iluminación para las pruebas realizadas.
Así como a todos mis maestros que han dejado una huella en mi formación.
GRACIAS
COGITO ERGO SUM°

Ingeniería Eléctrica.
iv
Lozada Ruiz Héctor Alonso.
Le dedico esta tesis a mi familia que creyó en mí, a toda la gente que me ayudo
durante la carrera, amigos y profesores.
A mis padres:
Ernesto Lozada Zepeda y Angela Patricia Ruiz Carrillo ,quienes me han brindado todo
incondicionalmente, a ustedes que siempre están ahí y que nunca me han
abandonado en toda mi vida, con el apoyo incondicional que siempre me han dado al
fin he terminado mi carrera profesional.
A mis hermanos:
Diego y Alvaro por la compañía y paciencia que me brindaron para la realización de
esta tesis.
A mis compañeros de equipo de tesis, porque gracias al trabajo conjunto que hicimos
durante un año, podemos ver realizado al fin esta tesis
Gracias.

Ingeniería Eléctrica.
v
Mejía Banda Cesar Alejandro.
Esta tesis representa un parte aguas entre una etapa muy enriquecedora y el camino
que el tiempo obliga. En toda la experiencia en la licenciatura y la conclusión del
trabajo de tesis, ha habido personas que merecen las gracias porque sin su valiosa
aportación, no hubiera sido posible este trabajo; y también hay quienes las merecen
por haber plasmado su huella en mi camino.
Esta tesis está dedicada a mis Padres, a quienes agradezco de todo corazón por su
amor, cariño y comprensión. En todo momento los llevo conmigo.
Agradezco a mis hermanos por la compañía y el apoyo que me brindan. Sé que
cuento con ellos siempre. A los amigos por su confianza y lealtad. A mi país porque
espera lo mejor de mí. A mis maestros por su disposición y ayuda brindadas.

Ingeniería Eléctrica.
vi
IMPLEMENTACIÓN DE UN CONTROL INTELIGENTE PARA REGULAR LA
INTENSIDAD LUMINOSA DE UNA LÁMPARA
Resumen
En este trabajo se presenta el diseño e implementación de un sistema de control
difuso tipo Mamdani, para regular la intensidad luminosa de una lámpara
incandescente y tipo mixta. La finalidad es mantener un nivel de iluminación constante
ante cambios de luminosidad.
El sistema de control se implementó en una tarjeta de evaluación con
microcontrolador MCHS12GC32. El lenguaje del programa del sistema de control se
realizó en lenguaje ensamblador con plataforma CODEWARRIOR.
La regulación de la intensidad se hizo mediante la variación de voltaje en las lámparas
mediante la técnica de modulación de ancho de pulso, activado en el
microcontrolador.
Las pruebas y resultados del sistema implementado son presentados con el fin de
justificar el presente trabajo.

Ingeniería Eléctrica.
vii
Índice
Agradecimientos .......................................................................................................... ii
Resumen .................................................................................................................... vi
Glosario ...................................................................................................................... ix
Lista de símbolos ....................................................................................................... xi
Índice de tablas ........................................................................................................ xiii
Índice de figuras ....................................................................................................... xiv
CAPÍTULO 1. Introducción .......................................................................................... 1
1.1 Generalidades ................................................................................................... 1
1.2 Antecedentes .................................................................................................... 3
1.3 Justificación....................................................................................................... 5
1.4 Objetivos ........................................................................................................... 6
1.5 Estructura de la tesis ......................................................................................... 7
CAPÍTULO 2. Iluminación y lámparas ........................................................................ 8
2.1 Introducción a la iluminación ............................................................................. 8
2.2 Análisis del sistema de iluminación ................................................................... 9
2.2.1 Sistema de control .................................................................................... 10
2.2.2 Luminaria ................................................................................................. 12
2.2.3 Fuente de luz ........................................................................................... 12
2.3 Lámparas incandescente y de luz mixta ........................................................ 16
2.4 Datos para seleccionar una lámpara ............................................................... 19
CAPÍTULO 3. Control convencional e inteligente ...................................................... 22
3.1 Introducción a los sistemas de control ............................................................ 22
3.2 Sistemas de lazo abierto y lazo cerrado ......................................................... 23
3.3 Controladores convencionales ........................................................................ 25
3.4 Controladores inteligentes difusos .................................................................. 27
3.5 Lógica difusa ................................................................................................... 30
3.6 Descripción del algoritmo difuso tipo Mamdani ............................................... 31

Ingeniería Eléctrica.
viii
3.6.1 Obtención de valores difusos ................................................................... 32
3.6.2 Evaluación de reglas ................................................................................ 34
3.6.3 Obtención de valores reales ..................................................................... 36
CAPÍTULO 4. Descripción de los elementos del sistema de control ......................... 38
4.1 Esquema del sistema de control ..................................................................... 38
4.2 Elementos físicos del sistema de regulación de intensidad luminosa ............. 39
4.4 Tarjeta de evaluación con microprocesador MC9HS12GC32 ........................ 43
4.4.1 Tarjeta de evaluación con microprocesador MC9HS12GC32 ................. 43
4.4.2 Conversión del analógico a digital (ATD10B8CV2) ................................. 46
4.4.3 Modulador de ancho de pulso PWM8B6CV1 ........................................... 48
4.4.4 FUNCIONES DE LA LÓGICA DIFUSA EN EL MICROCONTROLADOR 49
CAPITULO 5. Programación del sistema de control ................................................ 55
5.1 Introducción..................................................................................................... 55
5.2 Estructura del programa .................................................................................. 56
5.3 Descripción del programa ............................................................................... 56
5.3.1 Declaración de variables reales y difusas ................................................ 58
5.3.2 Definición de constantes difusas .............................................................. 59
5.3.3 Captura y Salida de datos ........................................................................ 63
CAPÍTULO 6. Resultados y aportaciones ................................................................ 69
6.1 Resultados ...................................................................................................... 69
6.2 Conclusiones................................................................................................... 74
6.3 Recomendaciones .......................................................................................... 75
Referencias ............................................................................................................... 76
APÉNDICE A. Curvas de la lámpara mixta ............................................................... 78
APÉNDICE B. Equipo de medición……………………………………………………….80
APÉNDICE C. Programa en código ensamblador de la tesis………………………….81
APÉNDICE C. Programa en código ensamblador de la tesis.................................... 81

Ingeniería Eléctrica.
ix
Glosario
Candela. Se define como la intensidad luminosa de una fuente puntual que emite un
flujo luminoso de un lumen en un ángulo sólido de un estereorradián.
Cantidad de luz (Energía luminosa).La energía luminosa se determina por la
potencia luminosa o flujo luminoso emitido en la unidad de tiempo. Su unidad es el
lumen por hora.
Color. Es una interpretación subjetiva, psicológica y fisiológica, del espectro
electromagnético visible.
Control. Manipulación de una variable para llevarla a un estado deseado.
Desdifusificación. Conversión de salidas difusas a salidas reales necesarias para
realizar la acción de control.
Dimmers. Son dispositivos que regulan la tensión eléctrica en una o varias lámparas.
De esta manera es posible variar la intensidad de la luz, siempre y cuando las
propiedades de la luminaria lo permitan.
Eficiencia. Es el uso racional de los recursos con que se cuenta para alcanzar un
objetivo predeterminado.
Eficiencia de la luminaria. La eficiencia de la luminaria depende de la potencia
lumínica total de salida (en lúmenes), en comparación con la entrada total de potencia
lumínica de todas las lámparas de la luminaria. Esto se expresa como un porcentaje.
Etiqueta. Descripción lingüística o el nombre asignado a un conjunto difuso.
Flujo luminoso (Potencia luminosa).El flujo luminoso que produce una fuente de luz
es la cantidad total de luz emitida o radiada en un segundo, en todas las direcciones.
Su unidad es el lumen.
Fotorresistencia. Es un componente electrónico cuya resistencia disminuye con el
aumento de intensidad de luz incidente.
Función de membresía. Define un conjunto difuso de asignación de las entradas
reales de dominio a los grados de pertenencia.
Difusificación. Convertir las entradas reales a entradas difusas para comenzar con la
evaluación de reglas.
Ingeniería Eléctrica.
x
Grado de membresía. Es el grado en que un valor real es compatible con una
función de pertenencia (de 0 a 1). También se conoce como el grado de pertenencia,
valor de verdad o difusos de entrada.
Iluminancia (Nivel de iluminación). Es la relación entre el flujo luminoso que recibe
la superficie y su área. Su unidad es el lux (lx).
Intensidad luminosa. La intensidad luminosa de una fuente de luz es igual al flujo
emitido en una dirección por unidad de ángulo sólido en esa dirección. Su unidad es
la candela.
Luminancia. Se llama así al efecto de luminosidad que produce una superficie en la
retina del ojo, tanto si procede de una fuente primaria que produce luz, como si
procede de una fuente secundaria o superficie que refleja luz.
Luminarias. Es cualquier cosa que soporte o sirva de alojamiento o revestimiento de
una fuente de luz.
Luz. Es una forma de energía radiante que se evalúa en cuanto a su capacidad para
producir sensación de visión.
Rendimiento luminoso (Eficacia luminosa). El rendimiento luminoso de una fuente
de luz, indica el flujo que emite la misma por cada unidad de potencia eléctrica
consumida para su obtención. Su unidad: el lumen/Watt.
Sistema de iluminación. Es un conjunto de dispositivos y equipos eléctricos, que
trabajando en conjunto nos proveen de iluminación artificial.
Universo de discusión. Alcance de todos los posibles valores aplicables a una
variable de sistema.

Ingeniería Eléctrica.
xi
Lista de símbolos
A Amperes
ADC Analog Digital Control (convertidor analógico digital)
Cambio del error
Cambio en la salida
Cambio en la salida total real
Cd Candela
Q Cantidad de luz
I Controlador integral
P Controlador proporcional
PD Controlador proporcional derivativo
PI Controlador proporcional integral
PID Controlador proporcional integral derivativo
CA Corriente alterna
CD Corriente directa
EEPROM Electrically Erasable Programmable Read-Only Memory (memoria de solo
lectura programable y eléctricamente borrable)
e Error
Error actual
Kd
Ki
Kp
GB
GHz
Flujo luminoso
Ganancia derivativa
Ganancia integral
Ganancia proporcional
Giga byte
Giga herz
KB Kilo byte
Khz Kilo hertz
KΩ Kilo ohm
E Iluminancia

Ingeniería Eléctrica.
xii
IRC Índice de reproducción de color
Intensidad luminosa
°C Grados Celsius
°K Grados kelvin
LED Light Emitting Diode (diodo emisor de luz)
lm Lumen
lm · h Lumen por hora
lm/W Lumen/watt
lx
Mhz
Lux
Mega hertz
COG Método del centroide o centro gravitacional de masa
μs Micro segundos
$ Números Hexadecimales
PWM Pulse Width Modulation (modulador de ancho de pulso)
RAM Random Access Memory (memoria de acceso aleatorio)
Rendimiento luminoso
Salida total real
TB
Suma del error
Tera byte
Tiempo de derivación
Tiempo de integración
k Tiempo de muestreó
R Valores medidos
V Volts
W Watt

Ingeniería Eléctrica.
xiii
Índice de tablas
Capítulo 2
Tabla 2.1 Ventajas y desventajas de las lámparas.
Tabla 2.2 Apariencia de color y temperatura de color.
Tabla 2.3 Índice de rendimiento de color.
Capítulo 3
Tabla 3.1 Ventajas y desventajas de los sistemas en lazo abierto y lazo cerrado.
Tabla 3.2 Descripción de las etiquetas difusas.
Tabla 3.3 Ejemplos de antecedentes y consecuentes.
Capítulo 4
Tabla 4.1 Características de la Lámpara Phillips151480.
Tabla 4.2 Características de la Lámpara Osram HWL 250W.
Capítulo 5
Tabla 5.1 Matriz de inferencia difusa para regular la intensidad luminosa de una
l lámpara.
Tabla 5.2 Significado de las etiquetas
Tabla 5.3 Registros de control del ADC.
Tabla 5.4 Registros de polaridad del PWM.

Ingeniería Eléctrica.
xiv
Índice de figuras
Capítulo 2
Figura 2.1 Luxómetro Amprobe LM- 80.
Figura 2.2 Lámpara incandescente halógena Osram Classic A ES.
Figura 2.3 Lámpara de descarga de vapor de sodio Osram NAV-T 150 4Y.
Figura 2.4 Lámpara de descarga fluorescente HE 28 W/840 SPS.
Figura 2.5 Lámpara de inducción Osram ENDURA.
Figura 2.6 Lámpara tipo LED Osram PAR16 20 CW.
Figura 2.7 Lámpara de luz de mixta Osram HWL.
Figura 2.8 Partes de una lámpara incandescente.
Figura 2.9 Partes de una lámpara de luz mixta.
Figura 2.10 Curva fotométrica de una lámpara de vapor de mercurio.
Capítulo 3
Figura 3.1 Sistema de control.
Figura 3.2 Sistema de control de lazo abierto.
Figura 3.3 Sistema de control de lazo cerrado.
Figura 3.4 Grados de verdad de la lógica difusa y lógica Booleana.
Figura 3.5 Descripción del algoritmo tipo Mamdani.
Figura 3.6 Obtención de un valor difuso de entrada a partir de un dato de entrada.
Figura 3.7 Funciones de membresía.
Figura 3.8 Funciones de membresía para el diseño del control.
Figura 3.9 Procedimiento de evaluación de reglas
Figura 3.10 Centro de gravedad.
Figura 3.11 Obtención de valores reales.
Figura 3.12 Funciones singleton.

Ingeniería Eléctrica.
xv
Capítulo 4
Figura 4.1 Diagrama a bloques del sistema de control.
Figura 4.2 Circuito de la fotorresistencia.
Figura 4.3 Fotorresistencia marca Steren 2 MOhms, 100 Vca
Figura 4.4 Etapa de potencia.
Figura 4.5 Tarjeta de evaluación MC9HS12GC32.
Figura 4.6 Puertos de la tarjeta de evaluación.
Figura 4.7 Diagrama de bloques del ATD110B8C
Figura 4.8 Diagrama de bloques del PWM8B6CV1.
Figura 4.9 Sistema de tres funciones de membresía de entrada, una para cada
e etiqueta de la entrada de sistema.
Capítulo 5
Figura 5.1Diagrama de control.
Figura 5.2 Estructura general del programa del control difuso.
Figura 5.3 Diagrama de flujo en memoria RAM.
Figura 5.4 Diagrama de flujo en memoria EEPROM.
Figura 5.5 Mapa de usuario configurable de la memoria
Figura 5.6 Funciones de membrecía para una lámpara.
Figura 5.7 Representación de funciones de membresía en un microcontrolador.
Capítulo 6
Figura 6.1 Fotografía del sistema de control.
Figura 6.2 Lectura de entrada al ADC proporcionando luz exterior al sistema.
Figura 6.3 Respuesta de control medida en la entrada del ADC.
Figura 6.4 Lectura en el osciloscopio para una disminución de iluminación.
Figura 6.5 Respuesta de control a un incremento de iluminación.
Figura 6.6 Respuesta de control aplicado a una lámpara mixta.
Figura 6.7 PWM alto.

Ingeniería Eléctrica.
xvi
Figura 6.8 PWM medio.
Figura 6.9 PWM bajo.
Apéndice A
Figura A.1 Distribución espectral.
Figura A.2 Características fotométricas.
Figura A.3 Comportamiento en el arranque.
Figura A.4 Características en servicio.
Figura A.5 Curva de depreciación de flujo.
Figura A.6 Curva de mortalidad.
Apéndice B
Figura B.1. Osciloscopio tektronik TDS1001b.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 1
CAPÍTULO 1. Introducción
1.1 Generalidades
Sin duda el empleo de energéticos como el petróleo, carbón y la electricidad es un
tema de importancia global, donde se expresan preocupaciones sobre las reservas,
debido a que no son renovables. El petróleo y el carbón son recursos que algún día
llegarán a consumirse completamente. La electricidad es uno de los energéticos más
utilizados en el mundo, irónicamente es necesario en algunos casos consumir otros
energéticos para generarla, como en las centrales termoeléctricas. Ante este
problema y el alto costo de la energía eléctrica, es necesario reducir el consumo de
energía utilizada en diferentes áreas, como la iluminación artificial, ya que se utilizan
nuevas tecnologías de mayor eficiencia en el consumo de la energía.
La iluminación artificial es necesaria para el desarrollo de actividades en ambientes
u horarios, en el que no existe iluminación natural o como complemento de ésta.
Considerando que normalmente, la iluminación no mantiene un nivel adecuado
acorde con la actividad desempeñada, las lámparas se encienden a toda su
intensidad, y, por lo tanto, provoca un consumo innecesario de energía eléctrica.
Para tratar de resolver estos problemas se han realizado diferentes acciones, una de
ellas es la adaptación de nuevas tecnologías en la construcción de lámparas. Otra
es el control de iluminación basados en la conexión y desconexión de lámparas. En
algunos casos se ha realizado la regulación de la iluminación mediante controles
convencionales (control encendido-apagado, proporcional, proporcional integral
entre otros).
Una alternativa que se desarrollo en el presente trabajo es el control de iluminación
mediante lógica difusa.
Capítulo 1 Introducción

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 2
La lógica difusa trata de definir los infinitos valores que se encuentran entre falso o
verdadero, amplía la idea de un conjunto clásico; calificado como un conjunto
difuso. A diferencia de la lógica booleana, la lógica difusa toma varios valores. En
lugar de una proposición que sea totalmente cierta o totalmente falsa, se forman una
serie de proposiciones que tengan grados de verdad, es decir, algo que es
parcialmente verdadero y parcialmente falso, al mismo tiempo.
La lógica difusa tiene dos algoritmos sobresalientes: Mamdani y Takagi-Sugeno. El
algoritmo tipo Mamdani emplea una serie de reglas basadas en consideraciones de
antecedente-consecuente (si-entonces) para el desarrollo de respuestas de control
(salidas).La estructura tipo Takagi-Sugeno utiliza fórmulas matemáticas para evaluar
los errores y aplicarlos a los sistemas de control. El seguimiento a las estructuras de
control tipo difuso llega al punto de implementarse dentro de las arquitecturas de
diversos microcontroladores por medio de su hardware. Por su versatilidad este
dispositivo es usado para realizar controladores ya que aparte de contar con el
algoritmo Mamdani, tiene el Convertidor Analógico Digital (ADT) y la técnica de
Modulación de Ancho De Pulso (PWM), puertos de entrada y salida.
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 3
1.2 Antecedentes
La regulación de la intensidad luminosa en la lámpara se realizará mediante el
algoritmo difuso tipo Mamdani. Es por ello que en el siguiente apartado se darán a
conocer los antecedentes de la lógica difusa y se mencionarán algunos trabajos
recientes que muestran diferentes aplicaciones de este tipo de algoritmo.
La lógica difusa se inventó por primera vez como un sistema de representación y
cálculo de conceptos vagos o inciertos. Se trata básicamente de una lógica de
valores múltiples que permite una interpretación más parecida a la interpretación
humana y el razonamiento en las máquinas mediante la resolución de categorías
intermedias entre las anotaciones, como falso-verdadero, caliente-frío, etc.,
utilizados en la lógica booleana. Esto fue visto como una extensión de la lógica
convencional booleana que se extendió a manejar el concepto de verdad parcial o
parcial falsa en lugar de los valores absolutos de las categorías de la lógica
booleana.
La teoría de conjuntos difusos se introdujo por el profesor Lotfi Zadeh en 1965 y
puede ser vista la teoría como un infinito valor de la lógica booleana. Lotfi Zadeh se
desempeña actualmente como director de BISC (Iniciativa de Berkeley en Soft
Computing). Antes de 1965 el trabajo de Zadeh se había centrado en la teoría de
sistemas y análisis de decisiones. Desde entonces, sus intereses de investigación se
han desplazado a la teoría de los conjuntos difusos y sus aplicaciones a la
inteligencia artificial, la lingüística, la lógica, el análisis de decisiones, la teoría de
control, sistemas expertos y redes neuronales. Actualmente, su investigación se
centra en la lógica difusa, el soft computing y la teoría computacional de nuevo
desarrollo de la percepción y el lenguaje natural. [10]
Las primeras aplicaciones industriales de la lógica difusa se llevaron a cabo en
Europa alrededor de 1975, cuando Ebrahim Mamdani y S. Assilian de la Universidad
de Londres publicaron un documento titulado "An Experiment in Linguistic Síntesis
with a Fuzzy Controller" (Un Experimento en Síntesis Lingüística con un Controlador
de lógica difusa), donde la capacidad de un control con lógica difusa fue probada
aplicando el control a una máquina de vapor.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 4
En 1980 la lógica difusa ganó más terreno en aplicaciones con soporte de
decisiones y análisis de datos. A mediados de 1985 Tomohiro Takagi y Michio
Sugeno proponen un nuevo modelo de control difuso (modelo Takagi Sugeno), por
lo que muchas compañías empezaron a interesarse e implementarlo en sus
procesos industriales.
A continuación se presentan, algunos trabajos que permitieron la realización de esta
tesis
Escareño Gómez Manuel Antonio, Trujillo Soriano José Reyes (2009). “El
diseño de un control de lógica difusa en un PLC para el ahorro de energía en
la iluminación de una nave industrial. [11].
Sinhue López Vite (2008). “La Simulación de reguladores difusos de velocidad
para motores de C.D. con excitación separada.”[12].
Jiménez Madrigal René (2007). “El diseño de un algoritmo de lógica difusa
genético para controlar la posición de un servomotor de C.D.”[13].
Herrera Espinosa Javier (2003). Describe el análisis, diseño y construcción de
un regulador difuso de velocidad para un motor-alternador de C.D. basado en
el algoritmo de Takagi-Sugeno. [14].

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 5
1.3 Justificación
En México existe una problemática en los sistemas de iluminación, ya que operan a
capacidad nominal y no regulan la cantidad de luz para realizar las actividades
diarias según la iluminación necesaria, aplicando comúnmente controles todo o
nada. Teniendo con esto un alto consumo de energía eléctrica.
Ante el alto costo de generar energía eléctrica, y que se produce a partir de
recursos no renovables como Petróleo, Carbón, Gas natural (Centrales
Termoeléctricas y de Ciclo combinado); es necesario reducir el consumo de energía,
utilizando nuevas tecnologías de mayor eficiencia en los sistemas de iluminación.
Por estas razones se opta por la implementación de técnicas de control inteligente
en lámparas, para variar los niveles de iluminación de acuerdo a la iluminancia
requerida, evitando que las lámparas se mantengan funcionando a su máxima
capacidad, además se obtiene un nivel de iluminación adecuado al que se requiere
para realizar las actividades cotidianas con lo que se consigue un menor consumo
de energía eléctrica.
El ahorro de energía en iluminación vendría acompañado de un menor uso de
hidrocarburos en plantas de generación Termoeléctricas y de Ciclo combinado
reduciendo el impacto que tienen estas sobre el medio ambiente.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 6
1.4 Objetivos
Objetivo General
Implementar un control inteligente tipo Mamdani, para regular la intensidad
luminosa de una lámpara incandescente y tipo mixta, con el fin de reducir el
consumo de energía eléctrica.
Objetivos Específicos
Conocer el contexto de las lámparas para determinar cuál de ellas es
adecuada para realizar las pruebas en el laboratorio.
Familiarizarse con los conceptos de lógica difusa para implementar el
control inteligente tipo Mamdani.
Diseñar el sistema de control inteligente para controlar el nivel luminoso
de la lámpara seleccionada.
Obtener las curvas de los resultados de las pruebas.
Analizar los resultados para concluir en la presente tesis.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 7
1.5 Estructura de la tesis
Este trabajo consta de 6 capítulos los cuales se describen a continuación:
Capítulo 1.Constituye las generalidades acerca de los aspectos a tratar en la tesis:
antecedentes, justificación, objetivos y la integración de la tesis.
Capítulo 2. Explica conceptos de la iluminación y la clasificación de las lámparas.
Además del principio de funcionamiento, ventajas y desventajas de las lámparas de
descarga fluorescentes, vapor de sodio, inducción, LED, mixtas e incandescentes.
Capítulo 3. Enuncia el contexto del control, controladores convencionales, control
inteligente y generalidades de la lógica difusa.
Capítulo 4. Contiene la descripción del diagrama a bloques del sistema de control y
la descripción de cada uno de los elementos.
Capítulo 5. Describe el desarrollo del programa en lenguaje ensamblador para la
implementación del control en el microcontrolador.
Capítulo 6. Contiene los resultados, conclusiones y recomendaciones.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 8
Capítulo 2
CAPÍTULO 2. Iluminación y lámparas
2.1 Introducción a la iluminación
La iluminación es el flujo luminoso por unidad de superficie, también se dice que la
iluminación de una superficie es el flujo luminoso que cubre cada unidad de la
misma.
La luz se origina de muchas maneras; de la energía solar (Luz diurna), de la
combustión, de las reacciones químicas y de la conversión de la energía eléctrica
de todas las fuentes luminosas. La luz diurna es abundante, sin embargo, no está
disponible de noche y es demasiada durante el día, siendo a veces muy brillante
para el confort visual o muy caliente para soportarla durante largo tiempo. Aun así,
cuando es controlada adecuadamente, como con anteojos de sol y con aire
acondicionado, es la más económica de las fuentes luminosas. En los edificios, la
iluminación eléctrica se ha convertido en la única fuente luminosa durante la
noche y en fuente complementaria durante el día. Los siguientes aspectos
constituyen la parte principal de un estudio de iluminación:
Cantidad de luz (energía luminosa)
Color
Flujo luminoso (potencia luminosa)
Iluminancia (nivel de iluminación)
Intensidad luminosa
Luminancia
Rendimiento luminoso (eficacia luminosa)
Iluminación y
lámparas

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 9
El nivel de iluminación (iluminancia) es el aspecto principal a considerar debido a
que es el parámetro obtenido mediante el cálculo de iluminación de un área. Para
obtener la medición del nivel de iluminación, se realiza por medio de un aparato
especial denominado luxómetro (Figura 2.1), que consiste en una célula fotoeléctrica
que, al incidir la luz sobre su superficie, genera una débil corriente eléctrica que
aumenta en función de la luz incidente. Dicha corriente se mide con un
miliamperímetro, de forma analógica o digital, calibrado directamente en lux.
Figura 2.1 Luxómetro Amprobe LM- 80.
2.2 Análisis del sistema de iluminación
En la actualidad, los centros laborales y lugares en que vivimos , son más que un
simple lugar de trabajo, es el entorno en los que las personas y sus necesidades
deben ser puntos de máxima atención para el diseño de iluminación.
Los factores fundamentales que se deben tener en cuenta al realizar el diseño de
iluminación son los siguientes:
Determinar el lugar a iluminar ya sea interior o exterior.
Iluminancias requeridas (niveles de flujo luminoso (lux) que inciden en
una superficie).
Uniformidad de la repartición de las iluminancias.
Limitación de deslumbramiento.
Limitación del contraste de luminancias.
Color de la luz y la reproducción cromática.
Selección del tipo de iluminación, de las fuentes de luz y de las
luminarias.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 10
Por lo tanto es importante tener en cuenta la cantidad y calidad de luz necesaria,
siempre en función de la dependencia que se va a iluminar y de la actividad que en
ella se realizará. Como elementos de un sistema de iluminación tenemos:
a) Sistema de control. Son los elementos y dispositivos que gobiernan la
iluminación artificial.
b) Luminaria. Sirve para aumentar el flujo luminoso, evitar el deslumbramiento y
viene condicionada por el tipo de iluminación y fuente de luz escogida.
c) Fuente de luz. Tipo de lámpara utilizada, que nos permitirá conocer las
cualidades del sistema eléctrico.
A continuación se describirán las funciones de cada elemento del sistema de
iluminación.
2.2.1 Sistema de control
La iluminación en un espacio, en ocasiones llega a ser muy brillante o su dirección
es incorrecta, causando incomodidad visual o utilización ineficiente. Por ejemplo la
luz llega a ser de color equivocado, causando una mala distribución de colores. Por
cualquiera de estas razones la luz debe ser controlada.
El cambio de iluminación en un local es regulado a través de varios parámetros
diferentes. Este empieza por las funciones básicas que son:
Energizar y desenergizar circuitos eléctricos, y llega hasta transiciones entre
colores, gobernadas automáticamente en forma cronológica. A través de la
programación de escenas de luz, no sólo es posible guardar los ajustes
hechos, sino igualmente su nueva definición flexible, en adaptación a las
necesidades cambiantes.
Conmutar y regular, a fin de conseguir una adaptación diferenciada de la
iluminación.
Los cambios de la iluminación se inician automáticamente a través del
control temporizado y mediante sensores.
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 11
En el caso del proyecto la función del control de luz que se utilizo es la función de
regular la intensidad luminosa de una lámpara. Para llevar a cabo dicha regulación,
se debe de tomar en cuenta los siguientes aspectos:
Control de luz natural y luz artificial
Percepción visual y confort
Durante el día, la combinación de luz natural y artificial determina el confort visual en
un entorno de trabajo. Y si controla la entrada de luz diurna, el control total del
entorno implica también el del alumbrado eléctrico. De hecho, la luz eléctrica se
inventó como complemento de la luz solar. Una correcta integración de ambas
permite reducir gradualmente la luz eléctrica si hay suficiente luz diurna. Además
que si se regula la cantidad necesaria de iluminación artificial, traerá como beneficio
un menor consumo de energía y por lo tanto beneficios económicos.
Como es sabido, el propósito principal de un adecuado diseño lumínico es crear
ambientes bien iluminados donde sea factible el buen desarrollo visual sin fatiga de
la vista. La importancia de estas consideraciones depende asimismo de la función o
tarea visual que se vaya a desarrollar en el espacio diseñado; no es lo mismo el
diseño para una biblioteca que el de un taller de orfebre o el de un local de ventas.
Por estas razones, es importante determinar los niveles de iluminación adecuados
para que permanezcan constantes en las tareas a realizar, teniendo en cuenta que
si la iluminación natural baja la iluminación artificial debe de regular la iluminación en
el área de trabajo para conservar el nivel de iluminación adecuado y manteniendo
los niveles de confort constantes.
Algunos dispositivos para un sistema de control de iluminación son:
Interruptores sencillo y de tres vías (energizar y desenergizar)
Dimmer (regular la intensidad luminosa)
Sensores de presencia (energizar y desenergizar)
Fotoceldas (energizar y desenergizar)

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 12
2.2.2 Luminaria La luminaria es cualquier elemento que soporte o sirva de alojamiento o
revestimiento de una fuente de luz. En general es aquello que proporciona soporte
eléctrico y mecánico a una fuente de luz. Se compone de:
Armadura o carcasa (para interiores o exteriores, de superficie, para
brazo o sobre columna y para ambientes normales o de riesgo)
Equipo eléctrico (lámpara, cables, balastro, dimmers y protecciones)
Reflectores (simétrico o asimétrico, concentrador o difusor y especular o
no especular)
Difusores (opal liso, lamas o reticular, especular y no especular)
Filtros
2.2.3 Fuente de luz
Las fuentes de luz que se analizarán serán las lámparas eléctricas. Estas lámparas
se clasifican según su principio de funcionamiento siendo la siguiente:
Lámparas incandescentes
Lámparas de descarga
Lámparas de descarga fluorescentes
Lámparas de inducción
Lámparas tipo LED
Lámparas tipo Mixta
La descripción de las características de cada lámpara se da a continuación:
Lámparas Incandescentes. Son aquellas que poseen un filamento en vacio o una
atmosfera de gases, que al calentarse producen luz visible. Son las fuentes de luz
más usadas, ya que en esta familia se hallan las lámparas tradicionales, halógenas
(Figura 2.2), dicroicas etc.
Figura 2.2 Lámpara incandescente halógena osram Classic A ES.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 13
Lámparas de Descarga. Estas lámparas funcionan por la descarga de un arco entre
dos electrodos, en una atmósfera de gases metálicos (vapor de sodio (Figura 2.3), y
vapor de mercurio); se usa tanto en iluminación interior como exterior.
Figura 2.3 Lámpara de descarga de vapor de sodio osram NAV-T 150 4Y.
Lámparas de descarga Fluorescentes. Son lámparas mixtas de incandescencia,
descarga (Figura 2.4) y luminiscencia cuyo uso principalmente está dirigido a la
iluminación general.
Figura 2.4 Lámpara de descarga fluorescente HE 28 W/840 SPS.
Lámparas de Inducción. Son lámparas de alta tecnología que funcionan a través
de un circuito electrónico de alta frecuencia (Figura 2.5).
Figura 2.5 Lámpara de inducción osram ENDURA.
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 14
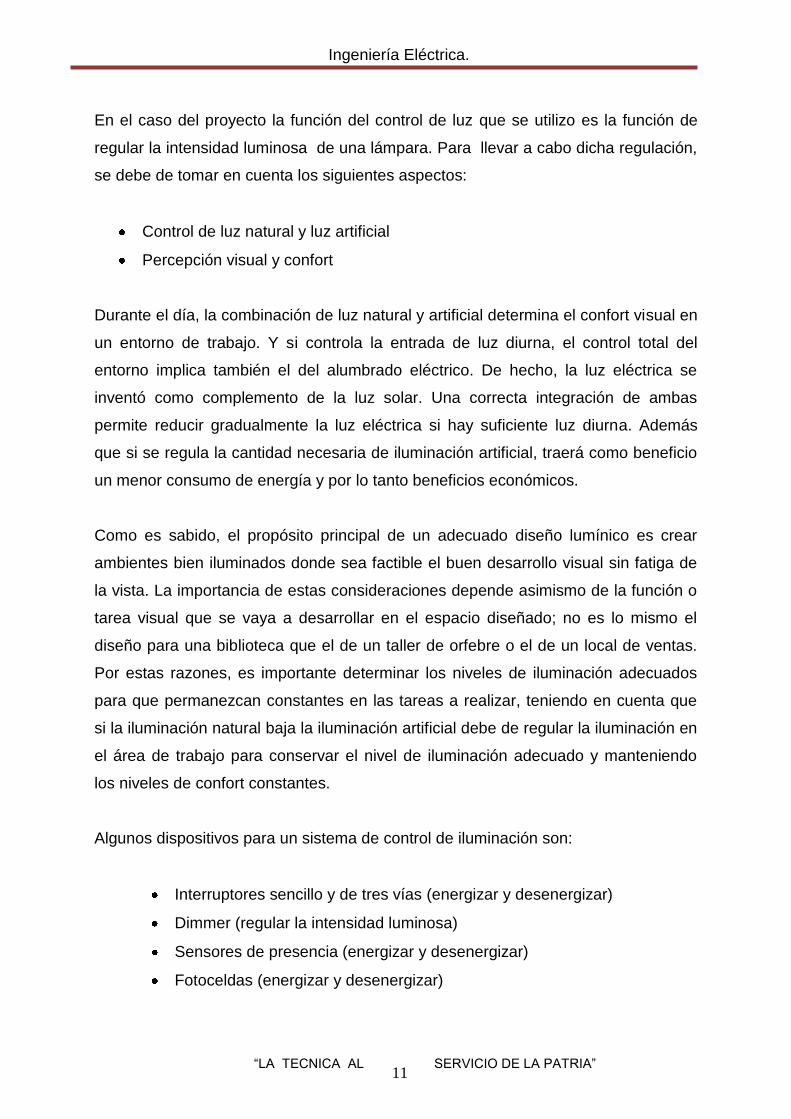
Lámparas Tipo LED. Son lámparas de alta tecnología que funcionan a través de un
semiconductor que al circular una corriente eléctrica por él, emite luz visible (Figura
2.6).
Figura 2.6 Lámpara tipo LED osram PAR16 20 CW.
Lámparas de luz Mixta. Las lámparas de luz mixta (Figura 2.7) son una
combinación de la lámpara de vapor de mercurio a alta presión y de la lámpara
incandescente, como resultado de uno de los intentos para corregir la luz azulada de
las lámparas de vapor de mercurio.
Figura 2.7 Lámpara de luz mixta Osram HWL.
La tabla 2.1 muestra las ventajas y desventajas de los tipos de lámparas que fueron
descritos.
No todas las lámparas son regulables, por esta razón se selecciona para realizar las
pruebas de laboratorio la lámpara incandescente y la lámpara de luz mixta, ya que
son lámparas cuyo comportamiento es lineal cuando se produce la regulación de
intensidad luminosa.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 15
Tabla 2.1 Ventajas y desventajas de las lámparas.
Tipo de lámpara Ventajas Desventajas
Incandescentes
-No necesita equipos auxiliares
de arranque (balastros).
-Inmejorable IRC, a menudo
100.
-Bajo costo unitario.
-Facilidad de mantenimiento.
-Facilidad de regulación con
dimmers.
-Tamaño compacto.
-Baja eficiencia luminosa.
-Son lámparas de vida útil corta
(1000h).
-Costo de operación alto.
Descarga
-Alta variedad de IRC.
-Buena eficiencia luminosa.
-Vida útil larga (6000 a 9000 h).
-costo de operación moderado.
- Necesitan balastros.
-Alto costo unitario.
-Mayor dificultad de mantenimiento.
-No son regulables con dimmers.
-Mayor tamaño.
Fluorescentes
-Amplia variedad de IRC.
-Costo unitario moderado.
-Menor mantenimiento
-Buena eficiencia luminosa.
-Vida útil larga (7500 h).
-Bajo costo de operación.
-Necesitan balastros.
-Los sistemas de regulación
dimmers son costosos y producen
una gran cantidad de armónicas.
-Mayor Tamaño.
Inducción
-Mantenimiento simple.
-Alta eficiencia luminosa.
-Larga vida útil (60000 h).
-Bajo costo de operación.
-Necesita balastros.
-Poca variedad de IRC.
-Alto costo unitario.
-No son regulables.
-Tamaños poco compactos.
LED
-No necesita balastros
-Alta variedad de IRC.
-Mantenimiento simple.
-Tamaño compacto.
-Alta eficiencia luminosa.
-Vida útil larga(50 000 h)
-Bajo costo de operación.
-Alto costo unitario.
-No son regulables.
Luz mixta
-No necesitan equipos de
arranque (balastros).
-Alta variedad de IRC.
-Costo unitario medio
-Son regulables en la zona lineal
de la lámpara.
-Bajo mantenimiento
-Buena eficiencia luminosa.
-Costo de operación bajo.
- Tamaño medio.
-Vida útil larga (6000 h).
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 16
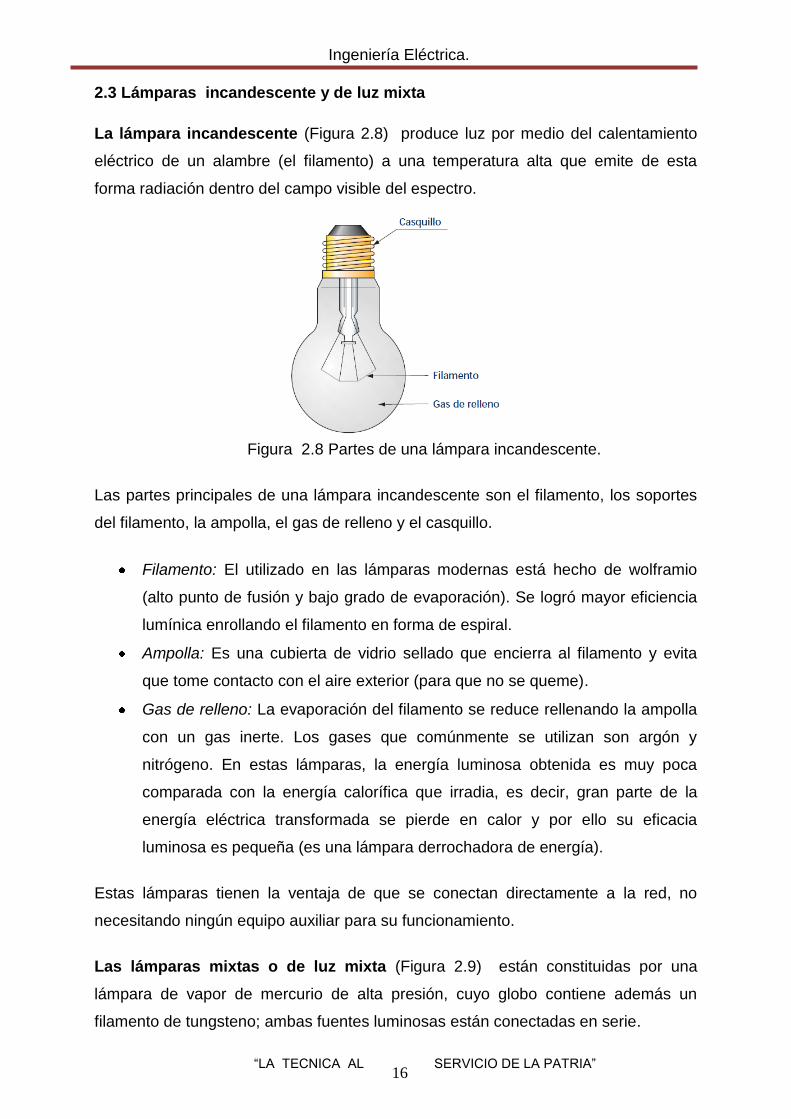
2.3 Lámparas incandescente y de luz mixta
La lámpara incandescente (Figura 2.8) produce luz por medio del calentamiento
eléctrico de un alambre (el filamento) a una temperatura alta que emite de esta
forma radiación dentro del campo visible del espectro.
Figura 2.8 Partes de una lámpara incandescente.
Las partes principales de una lámpara incandescente son el filamento, los soportes
del filamento, la ampolla, el gas de relleno y el casquillo.
Filamento: El utilizado en las lámparas modernas está hecho de wolframio
(alto punto de fusión y bajo grado de evaporación). Se logró mayor eficiencia
lumínica enrollando el filamento en forma de espiral.
Ampolla: Es una cubierta de vidrio sellado que encierra al filamento y evita
que tome contacto con el aire exterior (para que no se queme).
Gas de relleno: La evaporación del filamento se reduce rellenando la ampolla
con un gas inerte. Los gases que comúnmente se utilizan son argón y
nitrógeno. En estas lámparas, la energía luminosa obtenida es muy poca
comparada con la energía calorífica que irradia, es decir, gran parte de la
energía eléctrica transformada se pierde en calor y por ello su eficacia
luminosa es pequeña (es una lámpara derrochadora de energía).
Estas lámparas tienen la ventaja de que se conectan directamente a la red, no
necesitando ningún equipo auxiliar para su funcionamiento.
Las lámparas mixtas o de luz mixta (Figura 2.9) están constituidas por una
lámpara de vapor de mercurio de alta presión, cuyo globo contiene además un
filamento de tungsteno; ambas fuentes luminosas están conectadas en serie.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 17
El filamento actúa como fuente luminosa y a la vez como resistencia de conexión
para la lámpara de mercurio. Por lo tanto, éste tipo de lámparas no necesitan
aparatos de conexión especiales. La duración media de las lámparas de luz mixtas
es de unas 6000 horas, y su rendimiento de 18 a 28 lm/w. Esta clase de lámparas se
emplean en naves industriales, calles, estadios e iluminación de obras públicas. El
principio de funcionamiento de la lámpara es el siguiente:
Están formadas por una ampolleta llena de gas cubierta con una capa de fósforo que
contiene además, el tubo de descarga de mercurio conectado en serie con un
filamento de tungsteno. La capa de fósforo convierte la radiación ultravioleta de la
descarga de mercurio en luz visible, a ésta se agregan la radiación visible del tubo
de descarga y la luz cálida del filamento incandescente. La radiación de estas dos
fuentes de luz (mercurio e incandescente) se combinan armoniosamente al
atravesar la capa de fósforo, produciendo una luz blanca y difusa con un buen
rendimiento de color y un buen aspecto cromático.
El filamento de tungsteno actúa como reactancia inductiva para la descarga de la
ampolla mercurial estabilizando la corriente de la lámpara. Por lo tanto no necesitan
reactor o balastro y se conectan directamente a la red con los mismos sockets o
casquillos de las lámparas incandescentes y sin necesidad de cambiar el cableado o
el tablero. Las lámparas de luz mixta tienen doble eficiencia que las incandescentes
y una vida útil casi a veces mayor. La lámpara se constituye de las siguientes partes:
Tubo de descarga y soporte: El tubo de descarga está hecho de cuarzo.
Presenta una baja absorción a la radiación ultravioleta y a la visible, y posee
la capacidad de soportar las altas temperaturas de trabajo involucradas.
Electrodos: Cada electrodo principal se compone de una varilla de wolframio,
cuyo extremo se encuentra revestido por una serpentina de wolframio
impregnado con un material que favorece la emisión de electrones. El
electrodo auxiliar es simplemente un trozo de alambre de molibdeno o
wolframio colocado cerca de uno de los electrodos principales y conectado al
otro mediante una resistencia de 25 kΩ.
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 18
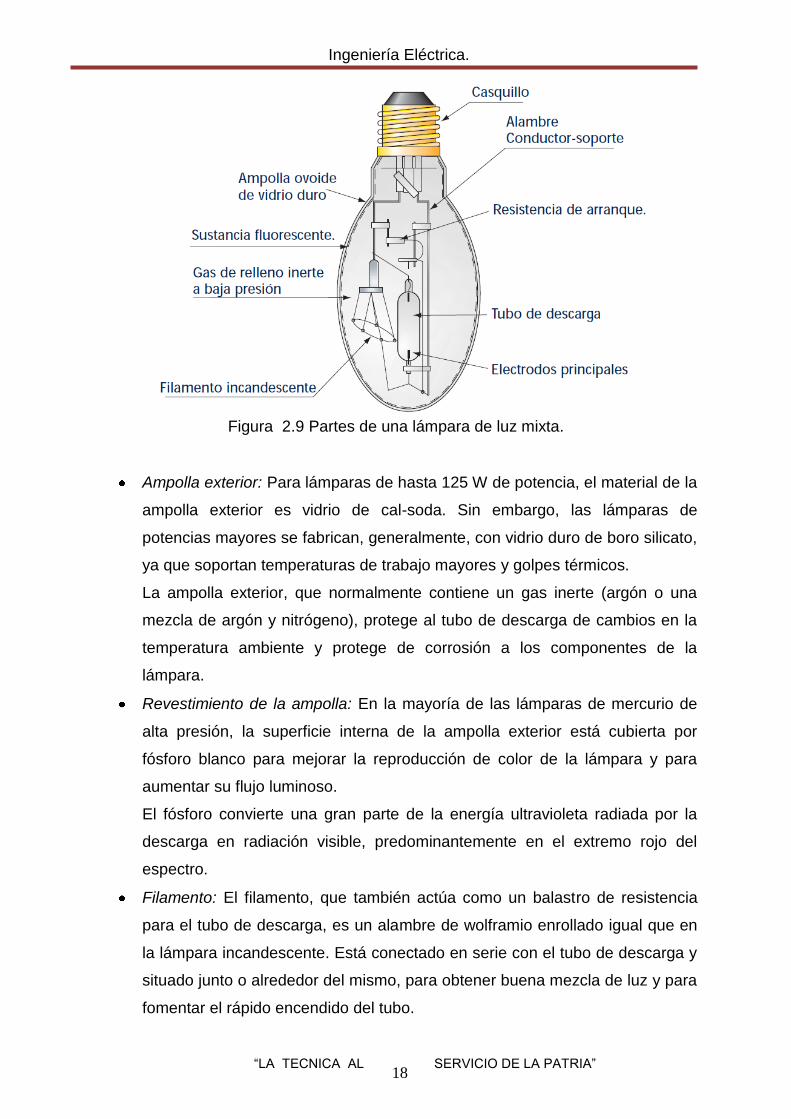
Figura 2.9 Partes de una lámpara de luz mixta.
Ampolla exterior: Para lámparas de hasta 125 W de potencia, el material de la
ampolla exterior es vidrio de cal-soda. Sin embargo, las lámparas de
potencias mayores se fabrican, generalmente, con vidrio duro de boro silicato,
ya que soportan temperaturas de trabajo mayores y golpes térmicos.
La ampolla exterior, que normalmente contiene un gas inerte (argón o una
mezcla de argón y nitrógeno), protege al tubo de descarga de cambios en la
temperatura ambiente y protege de corrosión a los componentes de la
lámpara.
Revestimiento de la ampolla: En la mayoría de las lámparas de mercurio de
alta presión, la superficie interna de la ampolla exterior está cubierta por
fósforo blanco para mejorar la reproducción de color de la lámpara y para
aumentar su flujo luminoso.
El fósforo convierte una gran parte de la energía ultravioleta radiada por la
descarga en radiación visible, predominantemente en el extremo rojo del
espectro.
Filamento: El filamento, que también actúa como un balastro de resistencia
para el tubo de descarga, es un alambre de wolframio enrollado igual que en
la lámpara incandescente. Está conectado en serie con el tubo de descarga y
situado junto o alrededor del mismo, para obtener buena mezcla de luz y para
fomentar el rápido encendido del tubo.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 19
Gas de relleno en ampollas externas: Así como en las lámparas
incandescentes, el gas de relleno en lámparas de luz mixta está compuesto
de argón pero agregándole un porcentaje de nitrógeno para evitar un arco en
el filamento. Comparada con la lámpara convencional de vapor de mercurio a
alta presión, se utiliza una presión mayor de llenado para mantener la
evaporación del wolframio al mínimo.
Las lámparas de luz mixta tienen la ventaja de conectarse directamente a la red (no
precisan de balastro y arrancador para su funcionamiento). Tardan unos dos minutos
en el encendido y no se efectúa el re-encendido hasta que la lámpara no se enfría.
2.4 Datos para seleccionar una lámpara
Para seleccionar una lámpara se consideran los siguientes aspectos:
Condiciones de servicio. Se determina si es lámpara tipo interior o tipo exterior
(intemperie).
Posición de operación. La aplicación de la lámpara es en posición horizontal o
vertical esto depende de la luminaria a utilizar.
Potencia Nominal. Condiciona el flujo luminoso y el dimensionamiento de la
instalación desde el punto de vista eléctrico (selección del conductor, dispositivos de
protección etc.).En la lámpara se especifica la potencia en Watt.
Eficiencia luminosa y decaimiento del flujo luminoso. Durante el funcionamiento,
duración de vida media y costo de la lámpara, estos factores condicionan la
economía de operación de la instalación. En las lámparas el flujo luminoso se
expresa en lúmenes, la eficiencia el lúmenes/ Watt y la vida útil se expresa en horas
de funcionamiento continúo.
Temperatura de los colores. Condiciona la tonalidad de la luz. Se dice que una
lámpara proporciona luz “caliente” o “fría”, si prevalecen las radiaciones luminosas
de colores rosa o azul (Tabla 2.2).
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 20
Tabla 2.2 Apariencia de color y temperatura de color.
Apariencia del color Temperatura de color(°K)
Cálida Por debajo de 3300
Intermedio De 3300 a 5300
Frio Por encima de 5300
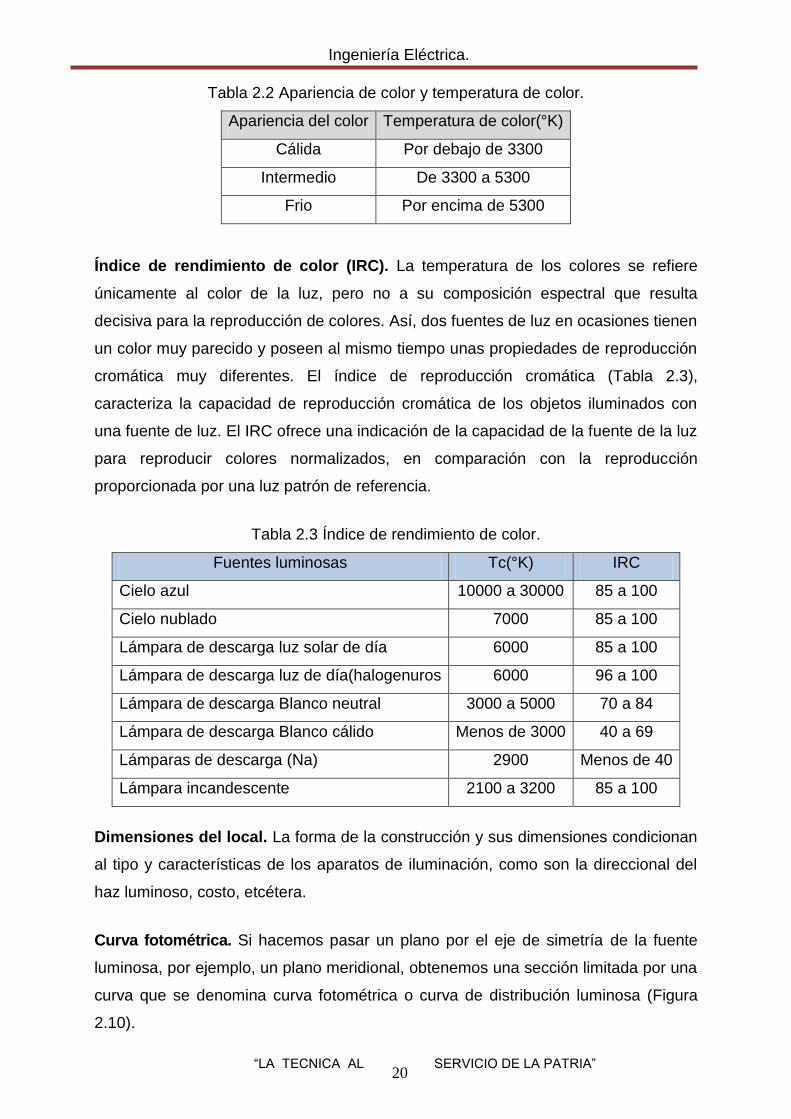
Índice de rendimiento de color (IRC). La temperatura de los colores se refiere
únicamente al color de la luz, pero no a su composición espectral que resulta
decisiva para la reproducción de colores. Así, dos fuentes de luz en ocasiones tienen
un color muy parecido y poseen al mismo tiempo unas propiedades de reproducción
cromática muy diferentes. El índice de reproducción cromática (Tabla 2.3),
caracteriza la capacidad de reproducción cromática de los objetos iluminados con
una fuente de luz. El IRC ofrece una indicación de la capacidad de la fuente de la luz
para reproducir colores normalizados, en comparación con la reproducción
proporcionada por una luz patrón de referencia.
Tabla 2.3 Índice de rendimiento de color.
Fuentes luminosas Tc(°K) IRC
Cielo azul 10000 a 30000 85 a 100
Cielo nublado 7000 85 a 100
Lámpara de descarga luz solar de día 6000 85 a 100
Lámpara de descarga luz de día(halogenuros 6000 96 a 100
Lámpara de descarga Blanco neutral 3000 a 5000 70 a 84
Lámpara de descarga Blanco cálido Menos de 3000 40 a 69
Lámparas de descarga (Na) 2900 Menos de 40
Lámpara incandescente 2100 a 3200 85 a 100
Dimensiones del local. La forma de la construcción y sus dimensiones condicionan
al tipo y características de los aparatos de iluminación, como son la direccional del
haz luminoso, costo, etcétera.
Curva fotométrica. Si hacemos pasar un plano por el eje de simetría de la fuente
luminosa, por ejemplo, un plano meridional, obtenemos una sección limitada por una
curva que se denomina curva fotométrica o curva de distribución luminosa (Figura
2.10).

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 21
Mediante la curva fotométrica de una fuente de luz se determina con exactitud la
intensidad luminosa en cualquier dirección, dato necesario para algunos cálculos de
iluminación.
Figura 2.10 Curva fotométrica de una lámpara de vapor de mercurio.
Variaciones de la tensión de alimentación. Las variaciones de la tensión de
alimentación influyen en los datos luminotécnicos de cualquier lámpara. En las
lámparas incandescentes afectan muy notablemente a la duración y temperatura de
color, y en las de descarga, a las relaciones de presión del arco y con ello a las
condiciones de descarga.
Lámpara de vapor de mercurio Osram tipo HQL -250 W

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 22
CAPÍTULO 3. Control convencional e inteligente
3.1 Introducción a los sistemas de control
Un sistema de control está formado por subsistemas y procesos unidos con el fin de
controlar las salidas de los procesos. Un horno produce calor como resultado del
flujo de combustible. En este proceso, los subsistemas, llamados válvulas de
combustible y actuadores de válvulas de combustible, se usan para regular la
temperatura de una habitación al controlar la salida de calor del horno. Otros
subsistemas, como los termostatos que funcionan como sistemas detectores, miden
la temperatura de la habitación. En su forma más sencilla, un sistema de control
produce una salida o respuesta para una entrada o estímulo dado, como se ilustra
en la figura 3.1. [5]
Figura 3.1 Sistema de control.
Los sistemas de control se aplican para mover equipos inmensos con una precisión
que de otra forma sería difícil de obtener. Construimos sistemas de control por
cuatro razones básicas:
1. Amplificación de potencia
2. Control remoto
3. Comodidad de forma de entrada
4. Compensación por perturbaciones
Capítulo 3 Control
convencional
e inteligente

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 23
Algunas ventajas de usar los sistemas de control son, por ejemplo los robots,
diseñados para compensar con alguna discapacidad humana y en ocasiones
proporcionan movilidad a las personas que la habían perdido. Los sistemas de
control también son útiles en lugares remotos o peligrosos.
En general, controlamos variables como la temperatura en los sistemas térmicos; la
posición y velocidad en los sistemas mecánicos, y voltaje, corriente o frecuencia en
los sistemas eléctricos. El sistema debe ser capaz de dar la salida correcta, incluso
con una alteración del ambiente.
Un sistema de control se clasifica de acuerdo a dos criterios:
a) En base a su salida con respecto a la entrada
Sistemas de lazo abierto.
Sistemas de lazo cerrado.
b) De acuerdo a su controlador
Convencional
Inteligente
En los siguientes apartados se profundiza en cada uno de los controles antes
mencionados.
3.2 Sistemas de lazo abierto y lazo cerrado
En la figura 3.2, se ilustra un sistema de control de lazo abierto formado por un
subsistema llamado transductor de entrada, que convierte la forma de la entrada a la
empleada por el controlador. El controlador maneja un proceso o planta. A veces, la
entrada se denomina referencia, mientras que la salida se llama variable controlada.
Otras señales, por ejemplo las perturbaciones, se muestran agregadas al
controlador y a las salidas del proceso por medio de puntos suma que dan la adición
algebraica de sus señales de salida por medio de signos asociados. La
característica distintiva de un sistema en lazo abierto, es no compensar ninguna
perturbación que se sume a la señal de actuación del controlador (perturbación 1 en
la figura 3.2).

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 24
Figura 3.2 Sistema de control de lazo abierto.
Las desventajas de los sistemas en lazo abierto, por ejemplo la sensibilidad a
perturbaciones e incapacidad para corregirlas, deben ser superadas en los
sistemas en lazo cerrado. La estructura genérica de un sistema en lazo cerrado
se ilustra en la figura 3.3. En esta figura el transductor de entrada convierte la
forma de entrada a la forma empleada por el controlador. Un transductor de
salida, o detector, mide la respuesta de salida y la convierte en la forma
empleada por el controlador. En la figura 3.3, la señal de salida se resta de la
señal de entrada. El resultado, generalmente, recibe el nombre de señal de
actuación; pero, en sistemas donde los transductores de entrada y salida
tienen ganancia unitaria (es decir, el transductor amplifica por 1 su entrada),
el valor de la señal de actuación es igual a la diferencia real entre la entrada
y la salida. Bajo esta condición, la señal de actuación se llama error.
Figura 3.3 Sistema de control de lazo cerrado.
El sistema en lazo cerrado compensa perturbaciones al medir la respuesta de
salida, alimentando esa medida a una trayectoria de realimentación y
comparando esa respuesta con la entrada en el punto suma. Si hay alguna
diferencia entre las dos respuestas, el sistema acciona la planta, por medio
de una señal de actuación, para hacer la corrección. Si no existe diferencia,
el sistema no acciona la planta, puesto que la respuesta de la planta ya es la
respuesta deseada.
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 25
Los sistemas en lazo cerrado entonces, tienen la obvia ventaja de una mayor
precisión que los sistemas en lazo abierto, aun cuando son menos sensibles
al ruido, a perturbaciones y a cambios en el entorno. La respuesta transitoria
y error en estado estable se controlan en forma más cómoda y con mayor
flexibilidad en los sistemas en lazo cerrado, con frecuencia mediante un
sencillo ajuste de la ganancia (amplificación) en el lazo, y a veces con un
rediseño del controlador. Al rediseño se le llama compensación del sistema
y al hardware resultante, compensador. Por otra parte, los sistemas en lazo
cerrado son más complejos y costosos que aquellos en lazo abierto. Así, se
debe considerar el punto intermedio entre la sencillez y el bajo costo de un
sistema en lazo abierto o la precisión y el alto costo de un sistema en lazo
cerrado.
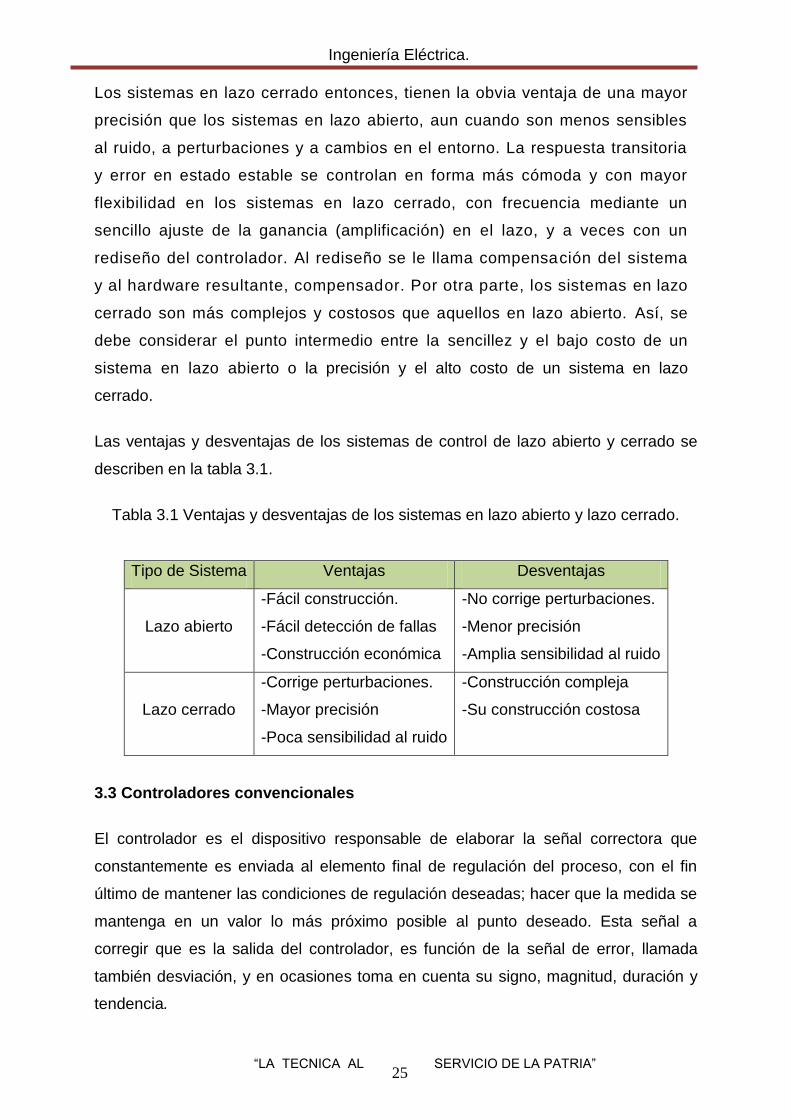
Las ventajas y desventajas de los sistemas de control de lazo abierto y cerrado se
describen en la tabla 3.1.
Tabla 3.1 Ventajas y desventajas de los sistemas en lazo abierto y lazo cerrado.
Tipo de Sistema Ventajas Desventajas
Lazo abierto
-Fácil construcción.
-Fácil detección de fallas
-Construcción económica
-No corrige perturbaciones.
-Menor precisión
-Amplia sensibilidad al ruido
Lazo cerrado
-Corrige perturbaciones.
-Mayor precisión
-Poca sensibilidad al ruido
-Construcción compleja
-Su construcción costosa
3.3 Controladores convencionales
El controlador es el dispositivo responsable de elaborar la señal correctora que
constantemente es enviada al elemento final de regulación del proceso, con el fin
último de mantener las condiciones de regulación deseadas; hacer que la medida se
mantenga en un valor lo más próximo posible al punto deseado. Esta señal a
corregir que es la salida del controlador, es función de la señal de error, llamada
también desviación, y en ocasiones toma en cuenta su signo, magnitud, duración y
tendencia.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 26
Los controladores convencionales se clasifican de acuerdo a la acción que le
aplicarán a la señal del error, la forma de representar esta acción se determina por
ecuaciones matemáticas. Los tipos de controladores convencionales son:
Controlador proporcional (P). El modo proporcional o regulación proporcional es
aquella en que el elemento final de regulación efectúa, con referencia a una posición
inicial correspondiente a una señal de error nula, un movimiento o carrera
proporcional a la magnitud de la desviación. El factor de proporcionalidad (Kp) es
ajustable. La expresión de salida de este tipo de control está dada por la ecuación
3.1.
…………………………………. (3.1)
Controlador integral (I).Este modo de regulación es llamado también flotante de
velocidad proporcional. El controlador hace que el elemento final de control se
mueva a una velocidad que es proporcional a la señal de error. En otras palabras,
cuanto mayor es la desviación, mayor es la velocidad de desplazamiento de la
válvula. El factor de proporcionalidad (Ki) es ajustable, con lo que la válvula se
mueve a distinta velocidad, para una misma señal de error. La expresión de salida
de este tipo de control está dada por la ecuación 3.2.
…………………………………(3.2)
Controlador proporcional-integral (PI). Este modo de regulación reúne las
características de los modos proporcional e integral, aprovechando las ventajas y
obviando los inconvenientes de ambos modos. Contendrá, por tanto, la acción
proporcional y la integral. Así que, en los instantes que siguen a un cambio de carga
o de punto de consigna, la acción proporcional facilitará inmediatamente un cambio
en la salida del controlador que tenderá de manera aproximada a ajustar el proceso.
Mientras tanto, la acción integral proporcionará paulatinamente la corrección
suplementaria exacta hasta anular la desviación. La expresión de salida de este tipo
de control está dada por la ecuación 3.3.
…………………....(3.3)

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 27
Controlador proporcional-derivativo (PD). A la forma de regulación
proporcional, con o sin acción integral, se le añade una acción llamada derivativa,
que responde solamente a la magnitud de la velocidad de cambio de la desviación,
de tal manera que se opone a ella. La formula de salida de este tipo de control está
dada por la ecuación 3.4
…….…………….(3.4)
Controlador proporcional-integral-derivativo (PID). Las acciones proporcional,
integral y derivativa se combinan en un mismo controlador, para obtener todas sus
ventajas y superar sus inconvenientes.La formula de salida de este tipo de control
está dada por la ecuación 3.5.
…(3.5)
A continuación se describen las características y el comportamiento de:
La acción proporcional Kp, corrige el valor del error en una cuantía pro-
porcional a la desviación. Es de efecto instantáneo y enérgico, pero
suele presentar desviación permanente.
La acción integral Ki, el error cambia en razón proporcional a la señal
de error o desviación. Es de efecto lento y progresivo, pero sigue
actuando hasta anular la desviación permanente.
La acción derivativa Kd, corrige el valor del error en una cantidad pro-
porcional a la velocidad de cambio de la desviación. Ello produce un
efecto anticipativo al tener en cuenta la tendencia de la variable
controlada.
3.4 Controladores inteligentes difusos
Los controladores basados en algoritmos difusos reciben el nombre de controladores
inteligentes difusos ó controladores difusos.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 28
Un sistema de control inteligente consiste por una parte en una base de
conocimiento con objeto de representar la información necesaria para el control de la
planta, y por otra de un “mecanismo de inferencia” que procese el conocimiento por
medio del razonamiento, utilizando, un nuevo conjunto de datos, para la obtención
de una decisión. Por tanto, ambos aspectos, representación y procesamiento son de
fundamental importancia en el control difuso. Los controladores difusos son:
Controlador proporcional difuso. La representación simbólica de una regla para
un control convencional P como un control difuso, está dado por:
Si e es propiedad del símbolo, entonces u es propiedad del símbolo.
Controlador proporcional derivativo difuso. La ecuación 3.4 representa el
controlador convencional PD, donde kP y kD son el coeficiente proporcional y el
de ganancia diferencial. Entonces un control PD tipo difuso consiste de reglas.
La descripción simbólica está dada como:
Si e(t) es propiedad del símbolo y e(t) es propiedad del símbolo entonces, u(t) es
propiedad del símbolo.
Donde propiedad del símbolo es el nombre simbólico de un valor lingüístico, el
lenguaje natural equivalente de la descripción simbólica, arriba mencionada, se lee
como sigue:
Si el valor del error tiene la propiedad de ser (valor lingüístico) y el valor del cambio
del error tiene la propiedad de ser (valor lingüístico), entonces el valor de salida del
control tiene la propiedad de ser (valor lingüístico).
Por el motivo de la simplicidad omitiremos la referencia explícita del tiempo de
muestreo k como una regla que expresa una relación causal entre el estado de
proceso y las variables de salida del control cada uno permanece para un tiempo de
muestreo k. De este modo la representación simbólica al final de la regla es:
Si e es propiedad del símbolo y e es propiedad del símbolo entonces, u es
propiedad del símbolo.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 29
Controlador proporcional integral difuso. La ecuación dada para un control
convencional PI, está dada por la ecuación 3.3 donde kP y kI son los coeficientes
de ganancia proporcional e integral. Donde la derivada con respecto al
tiempo, de la ecuación arriba mencionada, es dada, de la transformada de
una ecuación equivalente 3.6.
……(3.6)
El control PI dado como un control difuso, consiste en la reglas de la forma:
Si e es propiedad del símbolo y e es propiedad del símbolo entonces, u es
propiedad del símbolo. En este caso para obtener el valor de control de salida del
control u(t) es agregado a u(t-1).Esto para ser acentuado aquí y tomar el lugar de
salida del control PI como un control difuso, que no es reflejado en las reglas
mismas.
Controlador Proporcional-integral-derivativo difuso.La expresión dada para un
control convencional PID, está dada por la ecuación 3.5. De esta manera, en un
caso discreto de un control PID como un control difuso, uno tiene un proceso de
variable de estado adicional, nombrado suma del error denotado e y registrado
como:
………(3.7)
Entonces la expresión simbólica para una regla de un control PID como control
difuso es:
Si e es propiedad del símbolo y e es propiedad del símbolo entonces, u es
propiedad del símbolo.
En algunos casos, cuando el conocimiento acerca de la estimación del parámetro
del proceso y su estructura está disponible, puede no querer confinarse a un mismo
para el uso del error, cambio del error, suma de errores como un proceso de
variables de estado, pero se prefiere usar el actual proceso de variables de estado.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 30
La expresión simbólica para una regla en el caso de entradas múltiples y una salida,
es la siguiente:
Si x1 es propiedad del símbolo y….xn es propiedad del símbolo entonces
u =f (x1…..xn).
Donde f es una función lineal del proceso de variables de estado xi (i=…….n) el tipo
de un control difuso.
Con el objetivo de familiarizarse con los conceptos de lógica difusa se profundizara
en los siguientes apartados.
3.5 Lógica difusa
A mediados de 1969 Lofti Zadeh, profesor de la Universidad de California en
Berkeley, reconoció que lo verdadero o falso de la lógica booleana no tomaba en
cuenta los múltiples matices de gris en el mundo real.
Para explicar los infinitos valores que se encuentran entre falso o verdadero, Zadeh
amplió la idea de un conjunto clásico a lo que él calificó como un conjunto difuso. A
diferencia de la lógica booleana, la lógica difusa toma varios valores.
En lugar de una proposición que sea totalmente cierta o totalmente falsa, se forman
una serie de proposiciones que tengan grados de verdad, es decir, algo que es
parcialmente verdadero y parcialmente falso, al mismo tiempo.
Se ha demostrado por Bart Kosko que la lógica booleana es un caso especial de la
lógica difusa, la cual puede ser descrita mediante la teoría de conjuntos difusos. La
mayoría de las aplicaciones de la lógica difusa implican tres pasos principales:
obtención de valores difusos (difusificación), la evaluación de reglas, y la obtención
de valores reales (desdifusificación). En la lógica difusa, la transición es gradual (es
decir, un elemento tiene la adhesión parcial en varios conjuntos).
Por ejemplo la lógica difusa reconoce no sólo valores claros u oscuros, sino también
las infinitas graduaciones intermedias figura 3.4

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 31
Figura 3.4 Grados de verdad de la lógica difusa y lógica Booleana.
La implicación de un control inteligente basado en lógica difusa incluyen beneficios
tales como:
Un mayor grado de facilidad de uso.
Mayor grado de autonomía.
Un mejor rendimiento.
Capacidades de auto diagnóstico.
Un mayor grado de adaptabilidad.
Un potencial para superar a un operador humano calificado.
La lógica difusa tiene 2 algoritmos sobresalientes siendo estos:
Mamdani.
Takagi-Sugeno.
Para este proyecto se aplicará la estructura tipo Mamdani, ya que este tipo de
algoritmo se puede aplicar por el hardware contenido en el microcontrolador
MC9HS12GC32.En el siguiente apartado se profundizará con este algoritmo por su
importancia en este trabajo.
3.6 Descripción del algoritmo difuso tipo Mamdani
El algoritmo de control se puede observar en el diagrama a bloques de la figura 3.5.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 32
Figura 3.5 Descripción del algoritmo tipo Mamdani.
A continuación se detalla este tipo de algoritmo.
3.6.1 Obtención de valores difusos
El primer paso en el procesamiento de la lógica difusa implica una transformación de
dominio llamada Difusificación. Las entradas reales se transforman en entradas
difusas como se muestra en la figura 3.6.
Figura 3.6 Obtención de un valor difuso de entrada a partir de un dato de entrada.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 33
Para transformar las entradas reales a valores difusos, se necesita evaluar cada
entrada real en las funciones de membresía de entrada. En este trabajo, la
iluminación corresponderá al valor real, se evalúa en la función de membresía
triangular almacenada para producir valores de entrada difusos.
El primer paso para difusificación es asignar etiquetas difusas (tabla 3.2) en el
universo de discusión de cada una de las entradas reales. Por lo que, para la
iluminación de un área, asignaremos un rango de etiquetas como se muestra en la
figura 3.7.
Tabla 3.2 Descripción de las etiquetas difusas.
NG Negativo grande
NP Negativo pequeño
CE Centro
PP Positivo pequeño
PG Positivo grande
La Función de membresía toma varias formas diferentes, como los que se muestran
en la Figura 3.7. Como son las formas Trapezoidal y triangular las que se utilizan
frecuentemente. Aunque otras formas son más representativas de los fenómenos
que ocurren en la naturaleza, estos necesitan ecuaciones más complicadas o tablas
de búsqueda de gran precisión. Dentro de los microcontroladores están incluidas en
el software las funciones triangular y trapezoidal.
Figura 3.7. Funciones de membresía.
Las funciones de membresía se establecen para dar significado numérico a cada
etiqueta, entonces cada función de membresía identifica el rango de valores de
entrada que corresponden a una etiqueta.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 34
Una función de membresía de entrada es creada para un número en específico, es
decir, el grado de membresía, para cada valor de entrada posible en cada etiqueta.
Los valores del eje y (u) se refieren al grado en el que las entradas medidas ó
capturadas (Intensidad luminosa en lux) se aplican en cada una de las etiquetas
(NG, NP, CE, PP, PG, etc.) de las funciones de membresía como se muestra en la
figura 3.8. Los valores de entrada en ocasiones llegan a pertenecer a más de una
función de membresía.
Figura 3.8 Funciones de membresía para el diseño del control.
Al obtener los valores difusos de entrada, permite al sistema responder
correctamente a los cambios graduales por medio de la evaluación de reglas. Así
por ejemplo, “si la Intensidad luminosa exterior es menor a la iluminación deseada”
la etiqueta de la función de membresía que adquiere es positivo grande (PG), por lo
tanto la acción de control que debe hacer es aumentar la intensidad luminosa de la
lámpara.
3.6.2 Evaluación de reglas
En la evaluación de reglas ó núcleo de inferencia, el procesador difuso utiliza las
reglas lingüísticas para determinar qué medidas de control deben producirse en
respuesta a un conjunto determinado de valores de entradas difusas.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 35
Las reglas difusas son preposiciones si-entonces las cuales describen las medidas
que deben adoptarse en respuesta a varias salidas difusas. Las reglas deben seguir
el comportamiento de sentido común del sistema y se escriben en términos de
funciones de membresía (etiquetas lingüísticas).
El método utilizado para la evaluación de reglas se llama inferencia de "mínimos-
máximos", ya que tiene el mínimo de los antecedentes (tabla 3.3) para determinar
las fortalezas de reglas y el máximo de los puntos fuertes de cada estado para
determinar el consecuente (tabla 3.4) de la salida difusa (figura 3.9).En ocasiones
las reglas se determinan a base de la experimentación o del conocimiento del
operador del sistema; por el método empírico, ya que la aplicación del sistema de
control a un sistema real tiene problemas de sintonización.
Tabla 3.3 Ejemplos de antecedentes y consecuentes
Antecedente Consecuente
SI la iluminación exterior es mínima Entonces la lámpara enciende
Si la iluminación exterior es demasiada La lámpara se apaga
Figura 3.9 Procedimiento de evaluación de reglas.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 36
3.6.3 Obtención de valores reales
En la desdifusificación las salidas difusas son combinadas en un punto específico.
Uno de los procedimientos más utilizados es el método del centroide o centro
gravitacional de masa (COG) figura 3.10. La razón por la que se utiliza este método
es porque se requiere una menor cantidad de cálculos.
Figura 3.10 Centro de gravedad.
En el método del centro gravitacional de masa se aplican funciones tipo barra
(singleton) como funciones de membresía de salida.
Una función de membresía de salida tipo singleton se representa por un punto
individual en el espacio de salida y por lo tanto, tiene una masa igual a cero; en la
figura 3.11 se muestra el proceso de desdifusificación.
Figura 3.11 Obtención de valores reales.
Al truncar una función singleton se obtiene una reducción en la altura de las
funciones como se ilustra en la figura 3.12.
Desdifusificación

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 37
Figura 3.12 Funciones singleton.
Usando el método COG los valores de salida singleton de los resultados se
combinan utilizando un promedio ponderado, por esta razón el cálculo se reduce a:
…..(3.8)
Después de aplicar esta fórmula se obtienen las salidas reales necesarias para
aplicar señales de control al sistema.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 38
CAPÍTULO 4. Descripción de los elementos del sistema de control
4.1 Esquema del sistema de control
El diagrama a bloques de sistema de control, que permite la regulación de la
intensidad luminosa se muestra en la figura 4.1.
Figura 4.1 Diagrama a bloques del sistema de control.
En la figura 4.1 se observa que es un sistema retroalimentado. Este sistema puede
ser descrito de la siguiente manera:
La cantidad de intensidad luminosa se mide a través de una fotorresistencia. Este
elemento se encuentra montado en un divisor de tensión. El sistema (divisor de
tensión) entrega un valor de tensión de CD proporcional al nivel de iluminación
existente en el ambiente.
Capítulo 4 Descripción de los
elementos del sistema de control
iluminación

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 39
La salida del circuito es leída por el puerto de entrada configurado con la función
ADC, en la tarjeta de evaluación. El ADC convierte la entrada analógica en un valor
digital, para que se reste con un valor de referencia. El valor obtenido de esta
operación se introduce en el algoritmo de Mamdani. La salida que se determina en
este algoritmo, permite la modulación de ancho de pulso (PWM).
La señal de salida PWM del microcontrolador se necesita adecuar mediante una
etapa de potencia, ya que esta señal no tiene la potencia eléctrica suficiente para el
funcionamiento de las lámparas ya que estas requieren valores de corriente y
tensión más grandes.
A continuación se describe la composición de los elementos físicos del sistema de
regulación de intensidad luminosa.
4.2 Elementos físicos del sistema de regulación de intensidad luminosa
Los elementos físicos del sistema de regulación de intensidad luminosa, se pueden
dividir en cuatro bloques:
Sistema de Iluminación
Transductor de voltaje
Sistema de Potencia
Tarjeta de Evaluación con microprocesador MC9HS12GC32
Estos elementos se interrelacionan con el programa a través de una computadora.
El Sistema de Iluminación está constituido por lámparas incandescentes y tipo
mixta. Los datos de la lámpara incandescente se describen en la tabla 4.1.
El tipo de lámpara de luz mixta que se eligió, es del fabricante Osram modelo HWL
250W. Las características de la lámpara sé muestran en la tabla 4.2.
El Transductor de voltaje, está constituido de una fotorresistencia y una resistencia
tal y como se muestra en la figura 4.2.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 40
La fotorresistencia mide la cantidad de luz emitida por el sol, la cual se transforma a
un nivel de voltaje. Este nivel se adecua al rango de 0,3-5 V mediante una
resistencia de 250 kΩ (figura 4.2). La característica de la fotorresistencia se puede
ver en la figura 4.3.
Tabla 4.1 Características de la Lámpara Phillips151480.
Potencia consumida 100 W
Tensión de lámpara 120V
Corriente de lámpara 0,925 A
Flujo luminoso 1560lm
Efic. Luminosa de la lámpara 15.60lm/w
Diámetro 85 mm
longitud máxima 94mm
Bulbo A55
Casquillo E27
Posición de funcionamiento universal
Conexión a la red directa
Vida útil promedio 1000 hs
Tabla 4.2 Características de la Lámpara Osram HWL 250W.
Potencia consumida 250 W
Tensión de lámpara 225 V
Tensión de encendido a 25°C > 180 V
Tensión de encendido a -18 °C > 220 V
Corriente de lámpara 1,23 A
Flujo luminoso 5800 lm
Efic. Luminosa de la lámpara 21 lm/W
Luminancia media 11 cd/cm2
Indice de reprod. cromática 68
Tono de luz nw
Temperatura de color 3800 K
Diámetro 90 mm
Longitud máxima 221 mm
Casquillo E 40
Temperatura máx. en casquillo 250 °C
Temperatura máx. en ampolla 380 °C
Posición de funcionamiento universal
Conexión a la red directa
Vida útil promedio 6000 hs
Depreciación al fin vida útil 30%
Mortalidad al fin vida útil 50%

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 41
Figura 4.2 Circuito de la fotorresistencia.
Figura 4.3 Fotorresistencia Marca Steren 2 MOhms, 100 Vca.
El Sistema de Potencia se muestra en la figura 4.4.
Figura 4.4 Etapa de potencia.
Las partes de la etapa de potencia omitiendo la lámpara son:
Inversor. Este dispositivo aparte de invertir la señal PWM del microcontrolador, tiene
la finalidad de proporcionar la corriente necesaria para el correcto funcionamiento
del Optoacoplador. El circuito integrado tiene la clave 7404.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 42
Optoacoplador. Tiene la función de separar toda conexión física entre la etapa de
potencia y la tarjeta de evaluación. Esto es para evitar la introducción de niveles de
voltaje y corriente por parte de la etapa de potencia, que dañen el funcionamiento de
la tarjeta (MC9HS12GC32). El optoacoplador es el EGG 3095. Y algunas de sus
especificaciones son:
Voltaje de aislamiento: 3000 V.
Alta velocidad de conmutación: menor a 8µs
Excitador (driver). Este dispositivo adecua los niveles de voltaje de la señal PWM,
necesarios para controlar la operación del IGBT. Algunas de las especificaciones del
dispositivo son:
Voltaje Offset: 500 Vmax
Rango de voltaje de alimentación para compuerta: 10-20 V
Tiempo de encendido/apagado típico: 120 y 94 ηs.
Fuente de corriente directa 35V. Esta fuente se emplea para la alimentación del
excitador IR2110, ya que para su funcionamiento se requiere de una tensión de 15V.
Tensión eléctrica 0.5 – 35 V
Corriente eléctrica 1 A
Transistor bipolar de puerta aislada (IGBT). Este dispositivo es un transistor bipolar
de compuerta aislada cuyas siglas en ingles son IGBT. Al IGBT se le considera
transistor de potencia por que tiene la facilidad de soportar corrientes arriba de 10
Amperes, voltajes mayores de 220 V y frecuencias de conmutación superiores a 5
Khz. La conmutación de este dispositivo se realiza por voltaje, haciéndolo un
elemento útil cuando se realizan tareas como accionamiento de motores de c.a. y
c.d., fuentes de alimentación, relevadores de estado sólido y contactores. Algunas
especificaciones sobresalientes son:
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 43
Corriente de colector pulsada a 50µs: 180A a Tc=25°C.
Voltaje de colector a emisor: 1000 V.
Frecuencia de operación: 10 Khz-40Khz.
Fuente de corriente directa 300 V. Este elemento proporciona el valor de voltaje en
CD que alimenta a la etapa de potencia a una tensión de 300 V.
La Tarjeta de Evaluación con microprocesador MC9HS12GC32 por su
importancia se tratara en el apartado siguiente. Por último se dan las características
de la computadora:
Procesador intel core i5-2300
Velocidad del procesador 2.8GHz
Memoria 4GB
Unidad de disco duro 1TB
Sistema operativo Windows vista
Monitor LED de alta definición
4.4 Tarjeta de evaluación con microprocesador MC9HS12GC32
En este subapartado se iniciará con las generalidades de la tarjeta de evaluación
con microprocesador MC9HS12GC32. Posteriormente se describirán los módulos
del microprocesador que se ocuparon en la realización del presente trabajo.
4.4.1 Tarjeta de evaluación con microprocesador MC9HS12GC32
Se llama microcontrolador a un sistema de microprocesador incluido en un chip.
Dentro de este chip están incluidos el procesador, la memoria y elementos
periféricos de forma que se pueda realizar un sistema de control simplemente
conectando los elementos exteriores.
Normalmente los microcontroladores suelen llevar una memoria RAM de 1 Kbyte a
32 Kbyte de memoria de programa y de 128 bytes a 2 bytes de memoria de datos,
pero en todos ellos suele existir la posibilidad de ampliar estas memorias
externamente.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 44
El primer periférico incluido en los microcontroladores son los puertos de entrada
salida normalmente se dispone de 2 a 6 puertos de 8 bits que son programados de
entrada o salida.
El segundo periférico son los temporizadores y contadores, que funcionan como el
reloj interno del microprocesador incluyendo algún divisor de frecuencia. Por último
como elemento periférico tiene un convertidor analógico digital de aproximaciones
sucesivas de 8 bits con un multiplexor de 8 canales, de forma que las conversiones
puedan hacerse en bloques.
El microprocesador utilizado en la tesis tiene integrado los periféricos antes
mencionados. Este microprocesador esta embebido en la tarjeta de evaluación que
se muestra en la figura 4.5. El microcontrolador se identifica con la clave
MC9HS12GC32.
Figura 4.5 Tarjeta de evaluación MC9HS12GC32.
La distribución de los pines del microcontrolador en la tarjeta de evaluación se
muestra en la figura 4.6.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 45
Figura 4.6 Puertos de la tarjeta de evaluación.
Algunas características adicionales son:
Memoria FLASH 32kB.
Memoria RAM 2KB.
Convertidor analógico digital 8 canales.
PWM 8 canales.
Temporizador 8 canales.
Soporte de lógica difusa (algoritmo Mamdani)
Para comunicar la computadora con el microcontrolador MC9HS12GC32, se
necesita de un interfaz o un medio con el cual se envíen y reciban datos. El
periférico que se utiliza para la comunicación es un conector serie RS-232 (RX, TX
y GND) que permite la comunicación con un puerto COM de la PC, o cualquier otro
dispositivo que tiene un puerto serial RS-232. El canal RS-232 se pone en ejecución
cuando la MC9HS12GC32 se ajusta en modo de monitor, el programa residente
utiliza este puerto para comunicarse con un programa apropiado que funciona desde
la PC.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 46
Para realizar la programación se emplea el programa serial monitor de Freescale
(2Kb) para HCS12. Este programa soporta 23 instrucciones que permiten la
programación de la memoria FLASH/EEPROM y elimina errores a través de una
interfaz en serie RS-232 a una PC, leer o modificar la memoria (FLASH incluyendo
la memoria EEPROM), leer o modificar los registros de la PC, ir, detener, o ir a la
instrucción. Para permitir que un usuario especifique la dirección de cada
interrupción y mantener la rutina de control [18].
4.4.2 Conversión del analógico a digital (ATD10B8CV2)
El ATD10B8C tiene 8 canales, 10 bits, multiplexados de entrada de
aproximaciones sucesivas de convertidor analógico a digital. Algunas de sus
características de este bloque del microcontrolador son:
• Resolución 8/10-bit.
• 7μs, solo tiempo de conversión de 10-bit.
• Ejemplo de amplificador de búfer.
• Programación de tiempo de la muestra.
• Control externo instantáneo.
• Realización de conversiones de interrupción de generación.
• Multiplexor analógico de ocho canales de entrada.
• Analógico / pin de entrada digital multiplexado.
• 1 a 8 secuencias de conversión de longitud.
• Modo interrumpible de conversión.
• Escaneo de canales múltiples.
Existen dos modos de operación en que puede operar el ATD10B8C: Modos
de conversión y modo MCU. El modo MCU consta de tres modos más,
siendo estos:
Modo de parada: Causa que todos los relojes de conversión se
detengan y por lo tanto el sistema tiene un consumo mínimo. Esto
anula cualquier secuencia de conversión en curso. Durante la

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 47
recuperación del modo de parada, debe haber una demora mínima
para el tiempo de recuperación de parada, TSR, antes de iniciar una
nueva secuencia de ATD conversión.
Modo espera: Continúa o cancelada, en baja potencia en función del
valor lógico del bit de espera.
Modo congelar: Se comportará de acuerdo a los valores lógicos de los
bits FRZ0 y FRZ1. Esto es útil para la depuración y la emulación.
La figura 4.7 muestra el diagrama de bloques del ATD110B8C.
Figura 4.7 Diagrama de bloques del ATD110B8C.
En él se observa que se tienen 12 pines externos, de los que se destacan los
pines AN6 / PAD6, AN5 / PAD5, AN4 / PAD4, AN3 / PAD3, AN2 / PAD2, AN1 /
PAD1 y AN0 / PAD0. Esto se debe a que cualquiera puede ser configurado como
entrada analógica. Los pines VHR es la tensión de referencia de alta y, VRL es la
tensión de referencia de baja para la conversión del ATD. Los pines VDDA, VSSA
son las fuentes de alimentación para los circuitos analógicos del bloque ATD10B8C.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 48
4.4.3 Modulador de ancho de pulso PWM8B6CV1
El PWM8B6CV1 tiene seis canales de programación de ciclo y periodo de trabajo y
un esquema de reloj flexible. Todas las características se describen a continuación
(ver figura 4.8):
Seis canales del PWM independientes con tiempo predeterminado y ciclo de
trabajo.
Contador para cada canal de PWM.
PWM Programable para activar o desactivar cada canal.
Software para la selección de la polaridad del pulso de cada canal
doble buffer para el periodo y ciclo de trabajo. Los cambios toman efecto al
final del período efectivo (el contador del PWM llega cero) o cuando el canal
se desactiva.
Centro programable alineado a la izquierda o con salidas individuales de los
canales
Seis canales de 8 bits o tres canales con resolución de 16-bit.
Cuatro fuentes de reloj (A, B, SA, y SB) que prevén una amplia gama
de frecuencias.
Reloj programable de la lógica de selección.
Parada de emergencia.
Figura 4.8 Diagrama de bloques del PWM8B6CV1.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 49
4.4.4 FUNCIONES DE LA LÓGICA DIFUSA EN EL MICROCONTROLADOR [8]
El microcontrolador por software tiene funciones que nos ayudan a la programación
de la lógica difusa. El microcontrolador HSC-12, incluye cuatro instrucciones que
realizan las tareas específicas de la lógica difusa, además, la implementación
de otras instrucciones son especialmente útiles en la elaboración y
depuración de algoritmos de lógica difusa.
Las cuatro instrucciones de lógica difusa son:
MEM (Determina el grado de pertenencia en funciones
trapezoidales).
REV (Evaluación de reglas de lógica difusa).
REVW (Evaluación ponderada de reglas de lógica difusa).
WAV (Instrucción que realiza la Desdifusificación por promedio
ponderado con funciones de salida tipo SINGLETON.
Otras instrucciones muy útiles para programas de lógica difusa son:
MINA. Coloca el menor de dos valores de 8 bits en el acumulador A.
EMIND. Coloca el menor de dos valores de 16 bits en el acumulador D.
MAXM. Coloca el mayor de dos valores de 8 bits en memoria.
EMAXM. Coloca el mayor de dos valores sin signo de 16 bits en memoria.
TBL. Búsqueda de tablas e interpolación de 8 bits.
ETBL. Búsqueda de tablas e interpolación de 16 bits.
EMACS. Multiplica y acumula con signo.
Para mayor resolución de programas difusos, las instrucciones matemáticas
rápidas de precisión extendida del HC-12, son también benéficas, los modos
de direccionamiento indexado flexibles ayudan a simplificar el acceso de la lógica
difusa a estructuras de datos almacenados como listas o tablas en memoria.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 50
El primer paso del algoritmo de Mamdani es la conversión e valores
reales a difusos (Difusif icación). Esta etapa el microcontrolador se auxilia
mediante la instrucción MEM.
La instrucción MEM del HSC-12, realiza el cálculo para cada etiqueta de una
entrada del sistema. Para realizar el proceso de Difusif icación completo
dentro de un núcleo de inferencia difusa. Varias instrucciones MEM deben
ser ejecutadas, usualmente en una estructura de lazo del programa.
La Figura 4.9, muestra un sistema de tres funciones de membresía de entrada,
una para cada etiqueta de la entrada de sistema. El eje X de las tres funciones
de membresía representa el rango de valores posibles de la entrada de
sistema. La línea vertical a través de las tres funciones de membresía
representa a un valor específico de entrada de sistema. El eje Y es el grado de
verdad y varía desde completamente falso ($00hasta totalmente verdad ($FF).
Figura 4.9 Sistema de tres funciones de membresía de entrada, una para cada
etiqueta de la entrada de sistema.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 51
Cuando el paso de la Difusificación empieza, el valor actual de la entrada del
sistema está en un acumulador del HSC-12, un registro índice apunta a la
primera definición de función de membresía en la base de conocimiento, y un
segundo registro índice apunta a la primera entrada difusa en RAM. Cuando
cada entrada difusa es calculada al ejecutar una instrucción MEM, el
resultado es almacenado en la entrada difusa y ambos apuntadores son
actualizados, es decir apuntan a la siguiente entrada difusa. El resultado final del
paso de Difusificación es una tabla de entradas difusas representando las
condiciones actuales del sistema.
La evaluación de reglas, es el elemento central de un programa de inferencia
difusa. Este paso procesa una lista de reglas de la base de conocimiento
usando valores actuales de entradas difusas en RAM, para producir una lista
de salidas difusas en RAM. Dichas salidas difusas se consideran como
posibilidades algo burdas de lo que la salida del sistema debería ser en
respuesta a las actuales condiciones de entrada.
Antes de que los resultados puedan aplicarse, las salidas difusas deben de
procesarse, o ser Desdifusificadas, para producir un solo valor de salida que
representa el efecto combinatorio de todas las salidas difusas.
El HC-12 ofrece dos variantes de instrucciones para evaluación de reglas. La
instrucción REV se util iza para reglas no ponderadas (todas las reglas se
consideran de igual importancia), la instrucción REVW es similar pero permite
a cada regla tener un factor de peso separado el cual es almacenado en una
estructura separada paralela de datos en la base de conocimiento. Aparte de
los pesos, las dos instrucciones para la evaluación de reglas también difieren
en la manera que las reglas son codificadas en la base de conocimiento.
La comprensión de la estructura y la sintaxis de las reglas es necesaria para
entender como un microcontrolador realiza la tarea de evaluación de reglas. A
manera de ejemplo, a continuación se lista una regla clásica en un sistema de
control con lógica difusa:

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 52
Si la temperatura es tibia y la presión es alta entonces el calor es (debería
ser) apagado.
A simple vista, parece que codificar esta regla en una forma compacta y
comprensible para el microcontrolador sería difícil, pero es realmente simple
reducir la regla a una lista breve de apuntadores de memoria. La parte
izquierda de la regla antes citada es un postulado de condiciones de entrada y
la parte derecha es un postulado de acciones de salida. La parte izquierda de
una regla está formada de uno o más antecedentes conectados por un operador
difuso AND. Cada expresión antecedente corresponde a una de las en tradas
difusas en RAM. Puesto que AND es el único operador para conectar
expresiones que anteceden, no hay necesidad de introducir estos en la
codificación de la regla. Los antecedentes se codifican como una simple lista
de apuntadores hacia las direcciones de las entradas difusas a los cuales
hacen referencia.
La parte derecha de una regla de evaluación se forma de una o más
consecuencias. Cada expresión de consecuencia consiste del nombre de una
salida del sistema seguido por un nombre de etiqueta.
Las reglas completas son almacenadas en la base de conocimiento como
una lista de apuntadores, es decir, direcciones de entradas difusas y salidas
difusas. Para que trabaje la lógica difusa de evaluación de reglas se deben
hacer algunos medios para saber cuáles apuntadores se refieren a entradas
difusas y cuales se refieren a salidas difusas.
Un método de organización es tener un número fijo de reglas con un número
específico de antecedentes y consecuencias. Un segundo método es marcar el
fin de la lista de reglas con un valor reservado y usar un bit en los
apuntadores para distinguir antecedentes de consecuencias.
Cada regla es evaluada secuencialmente, pero las reglas como grupo son
tratadas con el criterio de programación paralela, es decir, como si el las
fueran todas evaluadas simultáneamente. Dos operaciones matemáticas

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 53
toman lugar durante la evaluación de reglas. El operador AND difuso
corresponde a la operación matemática de hallar el mínimo y la operación OR
difuso que corresponde a la operación matemática de hallar el máximo.
La operación AND difuso es usada para conectar antecedentes dentro de
una regla. La operación OR difuso está implicada entre reglas sucesivas.
Antes de evaluar cualquier regla, todas las salidas difusas se ponen a cero
(lo que significa nada de verdad). Cuando una regla es evaluada, él más
pequeño (mínimo) antecedente es tomado para ser la verdad global de la
regla. Este valor de verdad de la regla es aplicado a cada consecuencia de la
regla a menos que la salida difusa ya sea grande (máxima). Si dos o más
reglas afectan a la misma salida difusa, la regla que es más verdadera será
el valor en la salida difusa porque las reglas se conectan con un operador OR
difuso implícito.
En el caso de las reglas ponderadas, el valor de verdad para una regla se
determina del modo usual hallando el valor mínimo de la regla. Antes de aplicar
este valor de verdad a las consecuencias de la regla, el valor se multiplica
por una fracción de cero (regla no habilitada) a uno (regla totalmente
habilitada). El resultado modificado del valor de verdad se aplica entonces a las
salidas difusas.
El resultado final del paso de evaluación de reglas, es una tabla de salidas
difusas sugeridas o "crudas" en RAM. Estos valores fueron obtenidos al
alimentar condiciones actuales (valores de entrada difusa) en las reglas del
sistema en la base de conocimiento. Estos resultados crudos no son
suministrados directamente a la salida del sistema porque son ambiguos. Por
ejemplo, una salida indica que la salida del sistema debería ser la mitad con
grado de verdad de $7F mientras que al mismo tiempo, otra indica que la
salida del sistema debería ser baja con grado de verdad de $40 el paso
de Desdifusificación resuelve tales ambigüedades.
El paso final en el programa de lógica difusa (Desdifusificación) combina las
salidas difusas en una salida compuesta del sistema. A diferencia de las

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 54
formas trapezoidales usadas en la entrada, el HSC-12 típicamente usa barras
o singletons para funciones de pertenencia de salida. Al igual que con las
entradas, el eje X representa el rango de posibles valores para la salida del
sistema. Las funciones de pertenencia de tipo barra o singleton consiste de las
posiciones en el eje X para cada etiqueta de la salida del sistema.
Antes de ejecutar WAV, un acumulador debe ser cargado con él número de
iteraciones (n), un registro índice debe apuntar a la lista de posiciones de
los singletons y otro registro índice debe apuntar a la lista de salidas difusas en
RAM.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 55
CAPITULO 5. Programación del sistema de control
5.1 Introducción
El programa elaborado para implementar el control de iluminación, se basa en
algoritmo difuso de Mamdani explicado en el apartado 3.6 del capítulo 3. La figura
5.1 muestra el diagrama a bloques del control de iluminación empleando este
algoritmo. Cabe recalcar que mediante esta figura, se observa la división de los
periféricos y el programa. El programa se implementa en la tarjeta de evaluación
con microprocesador HCS-12 y, cuyo diagrama a bloques se muestra también en
esta figura. La descripción de estos bloques se da a continuación:
La entrada real es un valor de tensión que aporta el transductor leído mediante el
ADC. Éste se compara con un valor de referencia predeterminado mediante el punto
suma. El resultado es un error, que se procesa para comenzar el algoritmo difuso.
Para obtener valores difusos, es necesario tener funciones de membresía para que
los valores reales se comparen en ellas y se obtenga el grado de membresía propio
de cada valor real. Una vez que se obtienen los valores difusos, son evaluados en
las reglas de inferencia mediante el método mínimo-máximo, con el cual se obtienen
los valores de salida. Estos valores se evalúan en funciones singleton.
La función singleton, emplea un proceso llamado centro gravitacional de masa, que
permite calcular los valores difusos para obtener una salida real.
Cuando se obtiene una salida real, el PWM hace su función de modular el ancho de
pulso, dependiendo de la entrada real evaluada en el proceso de Mamdani. Con el
ancho de pulso obtenido se controla la intensidad luminosa de la lámpara.
Programación del sistema de control
Capítulo 5

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 56
Figura 5.1 Diagrama de control.
En el siguiente apartado se muestra la estructura del programa, así como su
descripción.
5.2 Estructura del programa
La estructura general del programa del control difuso se muestra en el diagrama de
flujo de la figura 5.2.
La figura 5.2 puede ser dividida en dos partes:
La primera, se encuentra en memoria RAM. En ella se establece la asignación de
memoria de las variables, las funciones de pertenencia y reglas (ver figura 5.3).
La segunda parte se encuentra en memoria EEPROM donde se ejecuta el programa
principal, el diagrama de flujo se presenta en la figura 5.4.
5.3 Descripción del programa
Tomando como base el diagrama de la figura 5.3 y 5.4, en los siguientes apartados
se detalla el concepto de la programación del control difuso.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 57
Figura 5.2 Estructura general del programa del control difuso.
Figura 5.3 Diagrama de flujo en memoria RAM.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 58
Figura 5.4 Diagrama de flujo en memoria EEPROM.
5.3.1 Declaración de variables reales y difusas
Para la declaración de variables reales y difusas es necesario conocer el mapeo de
memoria. El mapeo de memoria se muestra en la figura 5.5 [9].
Figura 5.5 Mapa de usuario configurable de la memoria.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 59
De esta figura destaca:
1) El espacio del registro es $0000-$03FF.
2) La memoria FLASH es cualquier dirección mayor que $4000. Se asumen todas
las direcciones paginadas para la memoria FLASH.
3) La memoria RAM inicia en $3800 y termina en $3FFF.
4) Los dispositivos externos relacionados a la interfaz del bus externo multiplexado
no son soportados.
La implementación del control se inicia en RAM. Aquí se realiza el registro de
entradas y salidas tanto reales como difusas del sistema de control. Para lo cual es
necesario reservar un byte de memoria (RMB) o los necesarios para cada una de las
variables a trabajar en el programa. A continuación se muestra un fragmento del
programa en donde se realiza esta operación:
REF
TEMPORAL
ERR_ANT
ERR_ACT
NUMINP
NUMOUT
DATOS
MAX
ORG
FOT
ERR
VARERR
COG_OUT
EQU $3800; LOCALIDAD DE REFERENCIA
EQU $3801
EQU $3802; VARIABLE DEL VALOR DEL ERROR ANTERIOR
EQU $3803; VARIABLE DEL VALOR DEL ERROR ACTUAL
EQU $02; NUMERO 2
EQU $01; NUMERO 1
EQU $3EFF
EQU $3804;RESTRICCION DEL LIMITE DE VALORES
$3805
RMB NUMOUT; VARIABLE DEL VALOR DE ENTRADA
RMB NUMOUT;ACONDICIONADOR DE LA SEÑAL DE ERROR
RMB NUMOUT; ACONDICIONADOR DE LA VARIACION DEL ERROR
RMB NUMOUT; RESULTADO FINAL
;****************************************************************************
;* RESERVACIÓN DE MEMORIA PARA LAS FUNCIONES DE ENTRADA Y SALIDA *
;****************************************************************************
FUZ_INS
FUZ_OUT
RMB 5*NUMINP; SELECCIONA 10 LOCALIDADES DE MEMORIA
RMB 5*NUMOUT; 5 LOCALIDADES DE MEMORIA
5.3.2 Definición de constantes difusas
Esta sección consta de tres partes:
Funciones de membresía de entrada tipo trapezoidal
Funciones de membresía de salida tipo barra (Singleton)
Lista de reglas de inferencia

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 60
Para la definición de las funciones de membresía de entrada tipo trapezoidal en un
microcontrolador, se usa la representación de punto-pendiente. Esta representación
tiene un límite que comprende en el eje “ye” de 0 a 1, y en el eje equis depende del
tamaño de las funciones trapezoidales. El tamaño de las funciones trapezoidales, se
determinó en base a la tesis “Control de iluminación con lógica difusa para ahorro de
energía con plc’s “[11]. En la figura 5.6 se observan las funciones resultantes para el
error y el delta del error.
Figura 5.6 Funciones de membresía para una lámpara.
Para el programa en Ensamblador de Freescale las funciones de membresía se
representan como:
; ERROR*
; VAR ERROR
FCB $00,$43,$00,$04 ;FP PARA NG00
FCB $03,$7C,$04,$05 ;FP PARA NP01
FCB $49,$C2,$05,$04 ;FP PARA CE02
FCB $82,$FB,$04,$05 ;FP PARA PP03
FCB $C7,$FF,$05,$00 ;FP PARA PG04
FCB $00,$43,$00,$04 ;FP PARA NG05
FCB $03,$7C,$04,$05 ;FP PARA NP06
FCB $49,$C2,$05,$04 ;FP PARA CE07
FCB $82,$FB,$04,$05 ;FP PARA PP08
FCB $C7,$FF,$05,$00 ;FP PARA PG09
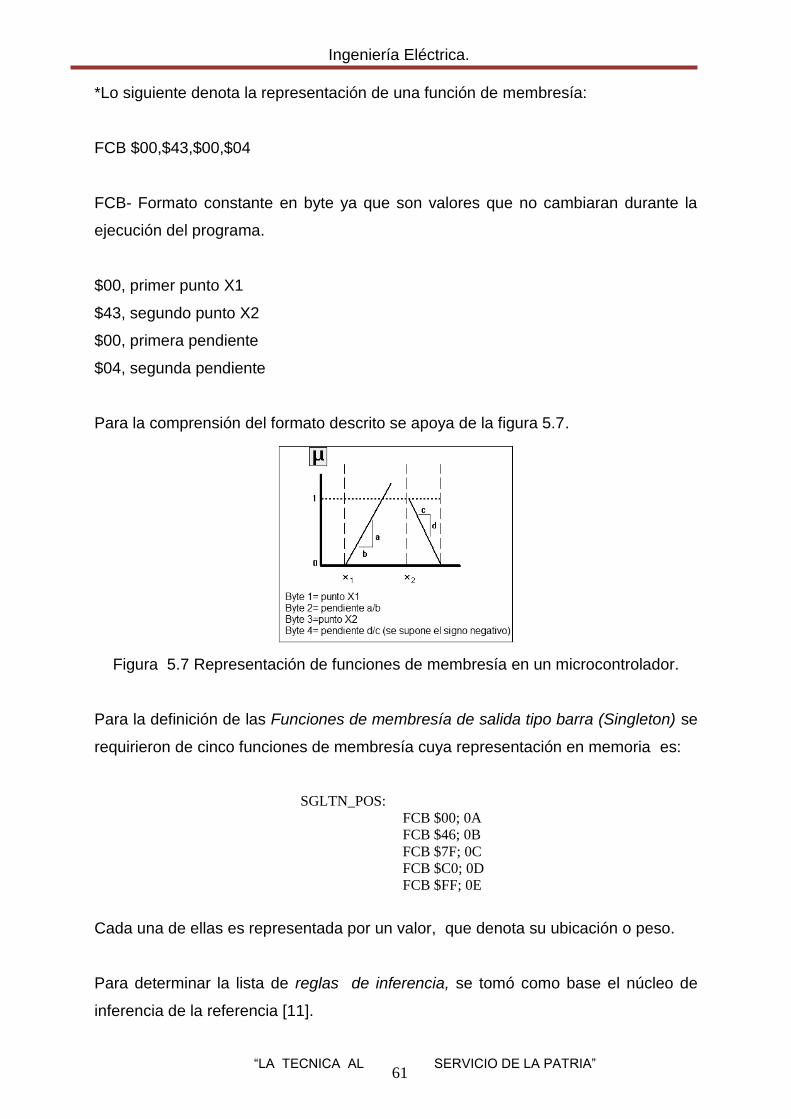
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 61
*Lo siguiente denota la representación de una función de membresía:
FCB $00,$43,$00,$04
FCB- Formato constante en byte ya que son valores que no cambiaran durante la
ejecución del programa.
$00, primer punto X1
$43, segundo punto X2
$00, primera pendiente
$04, segunda pendiente
Para la comprensión del formato descrito se apoya de la figura 5.7.
Figura 5.7 Representación de funciones de membresía en un microcontrolador.
Para la definición de las Funciones de membresía de salida tipo barra (Singleton) se
requirieron de cinco funciones de membresía cuya representación en memoria es:
SGLTN_POS:
FCB $00; 0A
FCB $46; 0B
FCB $7F; 0C
FCB $C0; 0D
FCB $FF; 0E
Cada una de ellas es representada por un valor, que denota su ubicación o peso.
Para determinar la lista de reglas de inferencia, se tomó como base el núcleo de
inferencia de la referencia [11].

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 62
Ajustándola mediante pruebas, la matriz de inferencia resultante quedó tal y como
se muestra en la tabla 5.1.
Tabla 5.1 Matriz de inferencia difusa para regular la intensidad luminosa de una
lámpara.
ERROR NG
NP
CE
PP
PG VARERROR
NG NG NG NP PP PG
NP NG NG CE PP PG
CE NG NG CE PG PG
PP NG NP CE PG PG
PG NG NP PP PG PG
El significado de las etiquetas que se emplean en la matriz de inferencia difusa se
muestra en la tabla 5.2.
Tabla 5.2 Significado de las etiquetas
NG Negativo grande
NP Negativo pequeño
CE Centro
PP Positivo pequeño
PG Positivo grande
La lista de reglas se determina a partir de la declaración de cada una de las
funciones de membresía. Para la sintaxis de las reglas, se asigna un número a cada
función de membresía (por ejemplo: 0A para la función de membresía singlenton con
etiqueta NG), un valor reservado para separar antecedentes de consecuencias
($FE), y otro para marcar el fin de cada regla ($FE).
FCB $00,$05,$FE,$0A,$FE ;(REGLA 01)
La regla anterior se lee:
Error es NG($00) y Var Error es NG($05) entonces($FE) Salida es NG($0A) fin de regla($FE)

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 63
La programación de la lista de reglas está dada por el siguiente código:
RULE_START:
;ERR,VARERR,SEP,CONS,FE
FCB $00,$05,$FE,$0A,$FE ;(REGLA 01)
FCB $00,$06,$FE,$0A,$FE ;(REGLA 02)
FCB $00,$07,$FE,$0A,$FE ;(REGLA 03)
FCB $00,$08,$FE,$0A,$FE ;(REGLA 04)
FCB $00,$09,$FE,$0A,$FE ;(REGLA 05)
FCB $01,$05,$FE,$0A,$FE ;(REGLA 06)
FCB $01,$06,$FE,$0A,$FE ;(REGLA 07)
FCB $01,$07,$FE,$0A,$FE ;(REGLA 08)
FCB $01,$08,$FE,$0B,$FE ;(REGLA 09)
FCB $01,$09,$FE,$0B,$FE ;(REGLA 10)
FCB $02,$05,$FE,$0B,$FE ;(REGLA 11)
FCB $02,$06,$FE,$0C,$FE ;(REGLA 12)
FCB $02,$07,$FE,$0C,$FE ;(REGLA 13)
FCB $02,$08,$FE,$0C,$FE ;(REGLA 14)
FCB $02,$09,$FE,$0D,$FE ;(REGLA 15)
FCB $03,$05,$FE,$0D,$FE ;(REGLA 16)
FCB $03,$06,$FE,$0D,$FE ;(REGLA 17)
FCB $03,$07,$FE,$0E,$FE ;(REGLA 18)
FCB $03,$08,$FE,$0E,$FE ;(REGLA 19)
FCB $03,$09,$FE,$0E,$FE ;(REGLA 20)
FCB $04,$05,$FE,$0E,$FE ;(REGLA 21)
FCB $04,$06,$FE,$0E,$FE ;(REGLA 22)
FCB $04,$07,$FE,$0E,$FE ;(REGLA 23)
FCB $04,$08,$FE,$0E,$FE ;(REGLA 24)
FCB $04,$09,$FE,$0E ;(REGLA 25)
END_OF_RULE: FCB $FF;fin de reglas
Después de declarar las variables y constantes del programa, se prosigue a la
descripción de éste en EEPROM. El programa inicia con la captura de datos.
5.3.3 Captura y Salida de datos
El valor de voltaje en CD obtenido en la fotorresistencia, se lee a través del ADC.
Para poder trabajar el ADC del microcontrolador, se necesita configurar los
registros ATD. Estos registros son:
ATDCTL2. Él registro controla la habilitación del ADC, las interrupciones y el
d disparador externo.
ATDCTL3. Este registro controla el número de conversiones por secuencia.
ATDCTL4. Con él se selecciona la frecuencia de reloj de conversión, y la resolución
d de la conversión A / D (o sea: 8-bits o 10-bits).
ATDCTL5. Se selecciona el tipo de secuencia de conversión y los canales de
e entrada analógica muestreados.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 64
La configuración de los registros del ADC en la tesis, está dada en la tabla 5.3.
Tabla 5.3 Registros de control del ADC.
Registro de
control
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
ATD2 1 0 0 0 0 0 0 0
ATD3 0 0 0 0 1 0 0 0
ATD4 0 0 1 1 0 0 1 0
ATD5 1 0 0 0 0 0 0 0
La programación se realiza en la subrutina llamada CONFADC la cual se muestra a
continuación:
CONFADC:
LDAA #$00
STAA DDRT
LDAA #$80
STAA ATDCTL2;ENCENDIDO DEL CONVERT SIN INTERRUPCIONES
CALL RETAR
LDAA #$08
STAA ATDCTL3;HACE 1 CONVERSION
LDAA #$80
STAA ATDCTL4;MODO A 8 BITS, 12 CICLOS POR CONVERSION
LDAA #$30
STAA ATDCTL5;
LDAB #$7F
STAB REF ;LOCALIDAD DE MEMORIA PARA ALMACENAR EL VALOR
;DE LA POSICION DE REFERENCIA
;O SETPOINTDE LA REFERENCIA
RTS ;RETORNO DE SUBRUTINA
El programa leerá un dato como entrada (mediante el ADC) y se asignará a una
localidad de memoria ( FOT ) tal y como se muestra a continuación.
LDAB #$20;ATDDR0H ;LOCALIDAD DE MEMORIA PARA ALMACENAR EL VALOR
STAB FOT ;DE LA POSICION ACTUAL
CALL LIM ;LLAMA FUNCION LIM PARA CONDICIONAMIENTO DEL VALOR DE
E ENTRADA
El valor de FOT se resta al valor de referencia produciendo un error (Error= REF – FOT). El error puede tener tres posibles resultados: negativo, positivo y cero.
En caso que esta diferencia sea negativa, se resta al valor de FOT $80 y el
resultado se guarda en Err. El Err es la variable de entrada al controlador.
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 65
En caso que sea positivo o cero se le adiciona el número $80 a la diferencia
y se asigna a la variable Err.
;*****************************************************************
;***** ACONDICIONAMIENTO DE LAS SEÑALES DE ERROR *****
;*****************************************************************
BEQ IN_ERROR
IN_ERROR:
A
CONTRA:
;SIY ES IGUAL A DATOS SALTA A FUNCION IN_ERROR
STAB 0, Y ;LIMPIA Y
INY
STY TEMPORAL; CARGA TEMPORAL A Y
LDAB FOT ; CARGA EL VALOR DE ENTRADA a B FOT=>B
LDAA REF ; CARGA EL VALOR DE REFERENCIA a A REF=>A
SBA ;RESTA B a A A-B=>A
BMI CONTRA ;SI EL RESULTADO ES NEGATIVO SALTA A CONTRA
ADDA #$7F ;SUMA 7F a A 7F + A=>A
STAA ERR_ACT;EL ACUMULADOR A SE GUARDA COMO ERROR
ACTUAL
STAA ERR ;EL ACUMULADOR A SE GUARDA COMO ERROR
BRA VARE ;BRINCA A VARE
STAA ERR_ACT;EL ACUMULADOR A SE GUARDA COMO ERROR
ACTUAL
NEGA ;REALIZA UN COMPLEMENTO AL ACUMULADOR A A*=>A
TAB ;TRANSFIERE EL VALOR DE A a B A=>B
LDAA #$7F ;CARGA EL ACUMULADOR A CON 7F
SBA ;RESTA B a A A-B=>A
STAA ERR ;EL ACUMULADOR A SE GUARDA COMO ERROR
La diferencia del error actual con respecto al error anterior; definen la variación del
error teniendo la misma lógica explicada para error. La programación se muestra a
continuación:
;*****************************************************************
;***** VARIACION DEL ERROR *****
;*****************************************************************
VARE:
CONTRA2:
ACTUAL:
LDAA ERR_ACT ;CARGA EL VALOR DEL ERROR ACTUAL EN A
SUBA ERR_ANT ;RESTA EL ERROR ANTERIOR a A A-ERR_ANT=>A
BMI CONTRA2 ;SI EL RESULTADO ES NEGATIVO SALTA A CONTRA2
ADDA #$7F ;SUMA 7F a A 7F + A=>A
STAA VARERR ;CARGA "A" A LA VARIABLE VARERR
BRA ACTUAL ;SALTA SIEMPRE A ACTUAL
NEGA ;REALIZA UN COMPLEMENTO AL ACUMULADOR A A*=>A
TAB ;TRANSFIERE EL VALOR DE A a B A=>B
LDAA #$7F ;CARGA EL ACUMULADOR A CON 7F
SBA ;RESTA B a A A-B=>A
STAA VARERR ;CARGA "A" A LA VARIABLE VARERR
MOVW ERR_ACT,ERR_ANT;MUEVE ERR_ACT =>ERR_ANT
CLR ERR_ACT ;LIMPIA VARIABLE ERR_ACT
CALL CLD ;LLAMA A CLD
BRA LOOP ;BRINCA A CICLO INFINITO

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 66
El error y el cambio del error, se procesan en el algoritmo de Mamdani
(Difusificación, Evaluación de reglas y Desdifusificación), obteniendo una salida a
través de un número en un byte de almacenamiento de memoria. Éste proceso se
lleva a cabo en la función CLD que se define a continuación.
CLD:
FUZZIFY:
GRAD_LOOP:
E
GRAD_LOOP1:
RULE_EVAL:
DEFUZ:
LDX #INPUT_MFS;APUNTA A LAS DEFINICIONES DE FPS
LDY #FUZ_INS;APUNTA A LAS ENTRADAS
LDAA ERR;CARGA LA PRIMERA ENTRADA DEL SISTEMA
LDAB #5;CARGA EL NUMERO DE ETIQUETAS
MEM;EVALUA LA FP
DBNE B, GRAD_LOOP;FORMA UN LAZO PARA FUZZIFICAR LAS 5
ETIQUETAS
LDAA VARERR;TRAE LA SEGUNDA ENTRADA DEL SISTEMA
LDAB #5;CARGA EL NUMERO DE ETIQUETAS
MEM;EVALUA LA FP
DBNE B, GRAD_LOOP1;FORMA UN LAZO PARA FUZZIFICAR LAS 5
ETIQUETAS
LDAB #5;5 SALIDAS DIFUSAS
CLR 1,Y+;LIMPIA SALIDAS E INCREMENTA EL APUNTADOR
DBNE B, RULE_EVAL;FORMA UN LAZO PARA LIMPIAR LAS SALIDAS
DIFUSAS ANTES DE COMENZAR LA EVALUCION DE REGLAS
LDX #RULE_START; APUNTA A LA PRIMERA REGLA
LDY #FUZ_INS;APUNTA A ENTRADAS Y SALIDAS DIFUSAS
LDAA #$FF;INICIA A Y LIMPIA BIT V
REV;PROCESA LISTA DE REGLAS
LDY #FUZ_OUT;APUNTA A SALIDAS DIFUSAS
LDX #SGLTN_POS;APUNTA A FPS TIPO BARRA
LDAB #5;5 SALIDAS DIFUSAS POR SALIDA REAL
WAV;SUMATORIA PARA PROMEDIO PONDERADO
EDIV;DIVIDE POR SUMA PONDERADA
TFR Y, D;;MUEVE RESULTADO A D
STAB COG_OUT;ALMACENA SALIDA DEL SISTEMA
STAB PWMDTY0;CARGA SALIDA AL PERIODO UTIL DEL PWM
JSR DELAY;BRINCA A SUBRUTINA DELAY(RETRASO DE TIEMPO)
RTC ;RETORNO DE LLAMADA
La salida real que se produce al término de la función CLD se introduce en el PWM
contenido en el hardware del microcontrolador. Éste genera pulsos de disparo que
entran a una etapa de potencia para el control de las lámparas.
Para configurar el PWM se utilizan los siguientes registros:

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 67
PWME. Cada canal de PWM tiene un bit (PWMEx) para iniciar su producción de
forma de onda.
PWMPERX. Existe un registro de periodo dedicado para cada canal. El valor de este
registro determina el período del PWM asociados de canal.
PWMDTYx. Existe un registro de destino específico para cada canal. El valor de
este registro determina la obligación de los asociados de canal PWM. El valor de
destino se compara con el contador y, si es igual que el valor del contador
se produce una coincidencia y el estado cambia la producción.
PWMCLK. Cada canal PWM tiene una opción de dos relojes que se utiliza como
fuente de reloj para ese canal.
PWMPOL. Indica la polaridad de partida de cada forma de onda del PWM, este
canal está determinado por el PPOLx asociados con el registro PWMPOL. Si el bit
de polaridad es 1, el pulso del canal de salida PWM es alto al principio del ciclo y
luego pasa a nivel bajo cuando se llega al recuento entre el contador y el periodo de
destino.
Los valores que tomaron en la tesis, cada registro se muestran en la tabla 5.4.
Tabla 5.4 Registros de polaridad del PWM.
Registro de
control
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PWMEx 0 0 0 1 0 0 0 0
PWMPERX 0 1 1 0 0 0 1 1
PWMDTYx 0 0 0 0 0 0 0 1
PWMCTL 0 0 0 1 0 0 0 0
PWMPOL 0 0 0 1 0 0 0 0
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 68
La programación del PWM se realiza en la subrutina llamada CONFPWM el cual se
muestra a continuación.
CONFPWM:
LDAA #$FF
STAA MODRR;RELACIONADO CON PWM
MOVB #%00000001,PWME;INICIALIZA CANAL 0 DE PWM;PWM0
MOVB #$FF,PWMPER0;CARGA VALOR DEL PERIODO
MOVB #$80,PWMDTY0;INICIA
MOVB #$01,PWMCLK
MOVB #%00000001,PWMPOL;ACTIVA LA POLARIDAD DEL CICLO
;ALTO:1
;BAJO:0
LDAA #$FF ;CARGA EL ACUMULADOR "A" EL VALOR FF
STAA PWMDTY0 ;ASIGNA "A" AL PERIODO UTIL DEL PWM
Con esta rutina se da por concluido la descripción de las partes del programa, el
programa integrado en su totalidad esta en el Apéndice B al final de esta tesis.
El capitulo siguiente se abordaran las pruebas resultados y conclusiones de este
trabajo.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 69
CAPÍTULO 6. Resultados y aportaciones
6.1 Resultados
Una vez que se verifico que el programa funciona correctamente, se procedió a
realizar las pruebas. Para ello se armó el circuito del diagrama a bloques de la
figura 4.1 del capítulo 4.
Por la razón que es un proyecto de iluminación, se utilizo una caja forrada de negro
con las dimensiones de 50cm x50 cm x 40cm. Tratando de simular un cuarto
obscuro.
Las primeras pruebas se realizaron con tres lámparas incandescentes de 100 W
conectadas en serie (figura 6.1). Las siguientes se realizaron con una lámpara tipo
mixta de 220V.
Figura 6.1 Fotografía del sistema de control.
Capítulo 6 Resultados y aportaciones

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 70
El sistema de control debe responder a los cambios en el exterior. La figura 6.2,
muestra un incremento de iluminación con lámparas externas a dicho sistema. La
respuesta de control es una eliminación de señal de salida, con lo que las lámparas
controladas son apagadas y, la lectura en el ADC (punto de entrada) es un cambio
del nivel de referencia a un nivel mayor propiciado por un cambio en el exterior.
Figura 6.2 Lectura de entrada al ADC proporcionando luz exterior al sistema.
En caso contrario la caída de iluminación de un nivel alto a un valor menor del
requerido, debe tener una respuesta de control que lleve al valor de referencia el
valor del ADC. Éste fenómeno se observa en la figura 6.3.
Figura 6.3 Respuesta del control medida en la entrada del ADC.
El sistema de control se probó, mediante cambios repentinos en la iluminación del
área de trabajo. En la figura 6.4 se muestra la acción de control al apagar la fuente

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 71
de iluminación externa del sistema controlado. Se puede observar un cambio en el
nivel de entrada que es compensado, con el encendido de las lámparas controladas,
hasta la estabilización en el punto de referencia.
Figura 6.4 Lectura en el Osciloscopio para una disminución de iluminación.
Durante el proceso de sintonización del controlador, tiene diferentes tipos de
comportamiento para un mismo tipo de cambio en el ambiente. En la figura 6.5 se
muestran oscilaciones, consideradas con una perturbación de un incremento de luz
repentino suprimido en un lapso pequeño de tiempo. De esta figura podemos decir
que el controlador funciona ya que él restablece al nivel de referencia.
Figura 6.5 Respuesta del control a un incremento de iluminación.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 72
La figura 6.6 muestra el actuar del control con una lámpara mixta. En ella se
observa una respuesta con comportamiento parecido al de lámparas
incandescentes. También en la lámpara se tiene una estabilización, siempre y
cuando no se presente un disturbio grande que deba tener una acción que
disminuya la tensión en demasía, con lo que se apaga la lámpara. Dejando sin
iluminación el recinto por un tiempo para su enfriamiento antes de volver a su
funcionamiento.
Figura 6.6 Respuesta del control aplicado a una lámpara mixta.
En la figura 6.7 se observa una señal de PWM de valor grande. Esto se debe a que
la fotorresistencia detecta poca luz. En consecuencia la acción de control es
encender las lámparas incandescentes a su mayor intensidad.
Figura. 6.7 PWM alto.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 73
En la imagen de la figura 6.8 se puede ver el PWM a un valor medio. Esto se debe a
que la cantidad de luz ambiente proporciona la mitad de la iluminación requerida, el
sistema de control proporciona un valor de PWM para que se obtenga una
iluminación adecuada. Esto hace que la lámpara no se mantenga encendida en su
máxima capacidad; y así obtener un ahorro.
Figura. 6.8 PWM medio.
La figura 6.9 muestra el PWM en un valor bajo, casi cero. Esto es debido a que
tenemos una entrada alta, es decir, el ADC detecta una gran cantidad de luz. Esto
nos permite mantener la lámpara apagada, lo que genera una iluminación artificial
nula en el área deseada.
Figura. 6.9 PWM bajo.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 74
6.2 Conclusiones
Las primeras pruebas se realizaron con tres lámparas incandescentes, para
compensar los 220V de alimentación de la lámpara mixta. En estas pruebas se
observo en las curvas de resultados, que si varía la iluminación el sistema actúa y
ajusta la luminosidad de las lámparas al valor de referencia. El ajuste no es
instantáneo, y en caso de perturbaciones extremas, el sistema es rápido y regresa al
valor de referencia. En la figura 6.2 se observa que el control actúa, apagando las
lámparas pero la respuesta del ADC es un valor arriba de la referencia en este caso
en control no actúa para llegar al valor de referencia. Exceptuando en caso de la
figura 6.2. El control en la lámpara puede ser aplicable a lámparas de halógeno,
lámparas fluorescentes con balastro regulable y en lámparas tipo LED.
En las pruebas con la lámpara mixta no se obtuvieron los resultados esperados,
debido que al aplicar el sistema de control a una lámpara mixta. Esté tiene la
finalidad de variar la intensidad luminosa de la lámpara, por el principio de
funcionamiento no se puede aplicar en su totalidad el sistema de control. Esto se
comprobó en un experimento previo realizado en cuarto obscuro. Se observó que el
rango de variación de intensidad luminosa de la lámpara mixta comprende de 180V
como tensión mínima y con tensiones máximas a 230V fuera de este rango la
lámpara se apaga.
Al tener la lámpara un rango de trabajo pequeño en comparación con el sistema,
cuando el sistema de control comienza actuar a valores fuera del rango de la
lámpara esta se apaga. Por el funcionamiento de la lámpara cuando se apaga
necesita de un tiempo para encender, entonces, llegará a tener momentos en el que
el sistema de iluminación no opere y el área a iluminar se encuentre en obscuridad.
Si se recorta el rango del sistema de control y se aplica a la lámpara mixta, según
las curvas de la figuras del apéndice A, A.4 y A.6, la vida útil de la lámpara se alarga
casi al doble y el consumo de la lámpara es menor al 80% de su consumo nominal.
Por esta razón se obtiene un ahorró económico tanto en consumo energético, así
como en la compra e instalación de lámparas.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 75
6.3 Recomendaciones
El sistema de control necesita tener una sintonización más fina para poder reducir el
tiempo de ajuste al valor de referencia. Así como se debe se acortar el rango del
sistema de control para poder aplicarlo en la parte lineal de operación de la lámpara
mixta.
En el caso del transductor se opta por cambiar a una fotocelda .Para observar el
comportamiento del sistema ya que la fotocelda es un transductor más lineal.
Es adecuado observar el comportamiento si en vez de ocupar cinco funciones de
membresía se ocupen más. Para así poder observar si el sistema de control es más
eficiente.
En la aplicación de lámparas LED .Se debe de considerar qué su regulación se basa
en la variación de corriente, por lo que se debe de hacer una modificación al sistema
de control .Para que regule a base de la variación en corriente eléctrica.
Como se observo en la figura 6.2 del capítulo 6.El control actuó y apago en su
totalidad las lámparas, pero no pudo llegar al nivel de iluminación de la referencia.
Una de las alternativas por las que puede optar es la aplicación de persianas
automáticas. Para controlar la iluminación exterior y así mantener siempre el nivel de
iluminación en la referencia del sistema de control.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 76
Referencias
[1] Carlos Jiménez. “Manual de luminotecnia”. Editorial Ceac. Barcelona 1998.
[2]Adolf Senner.”Principios de electrotecnia”. Editorial Reverté. Barcelona 1994.
[3] Jorge Chapa Carreón.”Manual de instalaciones de alumbrado y fotometría”.
LImusa.2004.
[4]Manual de luminotecnia indal. “17456327 Lighting Handbook INDAL guide
español”. 2002.
[5]Norman S. Nse. “Sistemas de control para ingeniería” .Tercera edición. Editorial
Grupo editorial patria. México 2002.
[6] Alfred Roca Cusido. “Control de procesos”. Segunda edición. Editorial Alfa
omega. México 2003.
[7]Steve Marsh,Yee Wei Huang ,Jim Sibigtroth.”Fuzzy Logic Program 2.0” .Motorola
USA 1994.
[8] Freescale Semiconductor, Inc. “Reference Manual S12CPUV2”. 2006.
[9] Freescale Semiconductor, Inc. “MC9S12C Family, MC9S12GC Family Data
Sheet”. 2006.
[10]Driakov Dimiter,Hellendoorn Hans,Reinfrank Michael “.An introduction to fuzzy
control”.Springer-Verlag,Berlin Heidelberg. USA 1993.
[11] Escareño Gómez Manuel Antonio, Trujillo Soriano José Reyes. “Control de
iluminación con lógica difusa para ahorro de energía con plc’s”. Tesis para obtener el
grado de Ingeniero Electricista. México, Zacatecas.2009.
[12] Sinhue Lopez Vite. “Simulación de reguladores difusos de velocidad para
motores de C.D con excitación separada.”. Tesis para obtener el grado de Ingeniero
Electricista. México, D.F. 2008

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 77
[13] Jiménez Madrigal René. “Diseño de un controlador lógico difuso, aplicado al
control de posición de un servomotor de CD, usando un algoritmo genético”. Tesis
para obtener el grado de Maestro en Ciencias. México, Veracruz. 2007.
[14] Herrera Espinosa Javier. “Implementación en un DSP de un regulador de
velocidad difuso tipo Takagi-Sugeno para un arreglo de motor de corriente directa-
alternador”. Tesis para obtener el grado de Maestro en ciencias. México D.F.2003
[15]www.osram.com.ar/osram_ar/Productos_Profesional/Iluminacion_general/Lampa
ras_de_descarga/hql_hwl.pdf
[16] http://catalog.myosram.com
[17] www.csiss.org/classics/content/68
[18]http://www.racom.com.mx/rac1/productos/descargas/1090A000001001_MT.pdf
[19]http://es.testwall.com/products/product.6394.0.0.TektronixTDS1001B
.html

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 78
APÉNDICE A. Curvas de la lámpara mixta
Se presentan algunas figuras como lo son la curva fotométrica, la distribución
espectral, características de arranque, fotométricas y de servicio. Así como las
curvas de depreciación de flujo y mortalidad
Figura A.1 Distribución espectral.
Figura A.2 Características fotométricas.
Figura A.3 Comportamiento en el arranque.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 79
Figura A.4 Características en servicio.
Figura A.5. Curva de depreciación de flujo.
Figura A.6. Curva de mortalidad.

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 80
APÉNDICE B. Equipo de medición [19]
La obtención de las curvas se realizaron mediante el osciloscopio tektronik
TDS1001b, sus características son las siguientes:
Figura B.1. Osciloscopio tektronik TDS1001b.
Ancho de Banda de 40 MHz
Velocidad de Muestreo de hasta 2 GS/s en Tiempo Real
2 Canales
Pantalla LCD Monocromática
Almacenamiento removible por medio de un puerto USB en el panel frontal
Conectividad transparente a la PC usando un puerto USB para dispositivos
con el software incluido OpenChoice y NI SignalExpress PC Software
Disparos avanzados incluyendo disparo por ancho de pulsos y de video con
selección de línea
Funcionalidad FFT estandard en todos los modelos
11 Mediciones Automáticas
Interface de Usuario Multi- Idioma con ayuda sensible al Contexto
Impresión directa a todas las impresoras compatibles con PictBridge vía
Puerto USB para dispositivos

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 81
APÉNDICE C. Programa en código ensamblador de la tesis
C.1 PROGRAMA
INSTITUTO POLITECNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD ZACATENCO DEPARTAMENTO DE INGENIERIA ELECTRICA IMPLEMENTACION DE UN CONTROL INTELIGENTE PARA LA REGULACION INTENSIDAD LUMINOSA EN UNA LAMPARA PROGRAMA REALIZADO POR: -CIPRES SIGUENZA ROBERTO -LOZADA RUIZ HECTOR ALONSO -MEJIA BANDA CESAR ALEJANDRO ASESORES: -M.en C.JAVIER HERRERA ESPINOZA -M.en C.MANUEL GARCIA LOPEZ PROGRAMA EN PLATAFORMA Freescale CodeWarrior PARA HCS12 EN LENGUAJE ENSAMBLADOR (ASSEMBLY ;********************************************************************************************************* XDEF Entry ABSENTRY Entry INCLUDE 'MC9S12GC32.inc' ROMStart EQU $4000 ;***************************************************************** ;***** SECCIÓN DE VARIABLES/DATOS ***** ;***************************************************************** ifdef _HCS12_SERIALMON ORG $3FFF - (RAMEnd - RAMStart) else ORG RAMStart endif ;***************************************************************** REF EQU $3800;LOCALIDAD DE REFERENCIA TEMPORAL EQU $3801 ERR_ANT EQU $3802; VARIABLE DEL VALOR DEL ERROR ANTERIOR ERR_ACT EQU $3803; VARIABLE DEL VALOR DEL ERROR ACTUAL NUMINP EQU $02 ;NUMERO 2 NUMOUT EQU $01 ;NUMERO 1 DATOS EQU $3EFF MAX EQU $3804;RESTRICCION DEL LIMITE DE VALORES ORG $3805 FOT RMB NUMOUT; VARIABLE DEL VALOR DE ENTRADA ERR RMB NUMOUT;ACONDICIONADOR DE LA SEÑAL DE ERROR VARERR RMB NUMOUT; ACONDICIONADOR DE LA VARIACION DEL ERROR COG_OUT RMB NUMOUT; RESULTADO FINAL ;***************************************************************** ;* RESERVACIÓN DE MEMORIA PARA LAS FUNCIONES DE ENTRADA Y SALIDA * ;***************************************************************** FUZ_INS RMB 5*NUMINP; SELECCIONA 10 LOCALIDADES DE MEMORIA FUZ_OUT RMB 5*NUMOUT; 5 LOCALIDADES DE MEMORIA ;***************************************************************** ;***** BASE DE CONOCIMIENTO ***** ;***************************************************************** ;FP: FUNCION DE PERTENENCIA ;FS: FUNCION DE SALIDA INPUT_MFS: ;ERROR FCB $00,$43,$00,$04 ;FP PARA NG 00 FCB $03,$7C,$04,$05 ;FP PARA NP 01 FCB $49,$C2,$05,$04 ;FP PARA CE 02 FCB $82,$FB,$04,$05 ;FP PARA PP 03 FCB $C7,$FF,$05,$00 ;FP PARA PG 04 ;VAR ERROR FCB $00,$43,$00,$04 ;FP PARA NG 05 FCB $03,$7C,$04,$05 ;FP PARA NP 06 FCB $49,$C2,$05,$04 ;FP PARA CE 07 FCB $82,$FB,$04,$05 ;FP PARA PP 08 FCB $C7,$FF,$05,$00 ;FP PARA PG 09 SGLTN_POS: FCB $00;FS PARA NG 0A

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 82
FCB $46;FS PARA NP 0B FCB $7F;FS PARA CE 0C FCB $C0;FS PARA PP 0D FCB $FF;FS PARA PG 0E ;***************************************************************** ;***** REGLAS ***** ;***************************************************************** RULE_START: ;ERR,VARERR,SEP,CONS,FE FCB $00,$05,$FE,$0A,$FE ;(REGLA 01) FCB $00,$06,$FE,$0A,$FE ;(REGLA 02) FCB $00,$07,$FE,$0A,$FE ;(REGLA 03) FCB $00,$08,$FE,$0A,$FE ;(REGLA 04) FCB $00,$09,$FE,$0A,$FE ;(REGLA 05) FCB $01,$05,$FE,$0A,$FE ;(REGLA 06) FCB $01,$06,$FE,$0A,$FE ;(REGLA 07) FCB $01,$07,$FE,$0A,$FE ;(REGLA 08) FCB $01,$08,$FE,$0B,$FE ;(REGLA 09) FCB $01,$09,$FE,$0B,$FE ;(REGLA 10) FCB $02,$05,$FE,$0B,$FE ;(REGLA 11) FCB $02,$06,$FE,$0C,$FE ;(REGLA 12) FCB $02,$07,$FE,$0C,$FE ;(REGLA 13) FCB $02,$08,$FE,$0C,$FE ;(REGLA 14) FCB $02,$09,$FE,$0D,$FE ;(REGLA 15) FCB $03,$05,$FE,$0D,$FE ;(REGLA 16) FCB $03,$06,$FE,$0D,$FE ;(REGLA 17) FCB $03,$07,$FE,$0E,$FE ;(REGLA 18) FCB $03,$08,$FE,$0E,$FE ;(REGLA 19) FCB $03,$09,$FE,$0E,$FE ;(REGLA 20) FCB $04,$05,$FE,$0E,$FE ;(REGLA 21) FCB $04,$06,$FE,$0E,$FE ;(REGLA 22) FCB $04,$07,$FE,$0E,$FE ;(REGLA 23) FCB $04,$08,$FE,$0E,$FE ;(REGLA 24) FCB $04,$09,$FE,$0E ;(REGLA 25) END_OF_RULE: FCB $FF;fin de reglas ; code section ORG ROMStart Entry: ; remap the RAM & EEPROM here. See EB386.pdf ifdef _HCS12_SERIALMON ; set registers at $0000 CLR $11 ; INITRG= $0 ; set ram to end at $3FFF LDAB #$39 STAB $10 ; INITRM= $39 ; set eeprom to end at $0FFF LDAA #$9 STAA $12 ; INITEE= $9 LDS #$3FFF+1;initialize the stack pointer else LDS #RAMEnd+1; initialize the stack pointer endif CLI ; enable interrupts ;***************************************************************** ;***** INICIO DEL PROGRAMA PRINCIPAL ***** ;***************************************************************** main: LDAA #$00 ;CARGAR EL ACUMULUDOR "A" CON CEROS STAA FOT ;SE INICIALIZAN LAS VARIABLES CON EL VALOR DEL STAA REF ;ACUMULADOR "A" $00 STAA ERR STAA VARERR LDAA #$7F STAA ERR_ANT LDAA #$FE ;CARGO CON EL VALOR FE EL ACUMULADOR A STAA MAX ;INICIA MAX CON EL VALOR DEL ACUMULADOR "A" JSR CONFPWM ;SALTA A SUBRUTINA DE CONFIGURACION DEL PWM JSR CONFADC ;SALTA A SUBRUTINA DE CONFIGURACION DEL ADC LOOP: LDAB #$20;ATDDR0H ;LOCALIDAD DE MEMORIA PARA ALMACENAR EL VALOR STAB FOT ;DE LA POSICION ACTUAL CALL LIM ;LLAMA FUNCION LIM PARA CONDICIONAMIENTO ;DEL VALOR DE ENTRADA LDY #DATOS ;CARGA A Y EL VALOR DE DATOS CPY #$3FFF ;POSICION QUE INDICA EL ULTIMO DE LOS 256 VALORES

Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 83
;***************************************************************** ;***** ACONDICIONAMIENTO DE LAS SEÑALES DE ERROR ***** ;***************************************************************** BEQ IN_ERROR;SIY ES IGUAL A DATOS SALTA A FUNCION IN_ERROR STAB 0, Y ;LIMPIA Y INY STY TEMPORAL; CARGA TEMPORAL A Y LDAB FOT ; CARGA EL VALOR DE ENTRADA a B FOT=>B IN_ERROR: LDAA REF ; CARGA EL VALOR DE REFERENCIA a A REF=>A SBA ;RESTA B a A A-B=>A BMI CONTRA ;SI EL RESULTADO ES NEGATIVO SALTA A CONTRA ADDA #$7F ;SUMA 7F a A 7F + A=>A STAA ERR_ACT;EL ACUMULADOR A SE GUARDA COMO ERROR ACTUAL STAA ERR ;EL ACUMULADOR A SE GUARDA COMO ERROR BRA VARE ;BRINCA A VARE CONTRA: STAA ERR_ACT;EL ACUMULADOR A SE GUARDA COMO ERROR ACTUAL NEGA ;REALIZA UN COMPLEMENTO AL ACUMULADOR A A*=>A TAB ;TRANSFIERE EL VALOR DE A a B A=>B LDAA #$7F ;CARGA EL ACUMULADOR A CON 7F SBA ;RESTA B a A A-B=>A STAA ERR ;EL ACUMULADOR A SE GUARDA COMO ERROR ;***************************************************************** ;***** VARIACION DEL ERROR ***** ;***************************************************************** VARE: LDAA ERR_ACT ;CARGA EL VALOR DEL ERROR ACTUAL EN A SUBA ERR_ANT ;RESTA EL ERROR ANTERIOR a A A-ERR_ANT=>A BMI CONTRA2 ;SI EL RESULTADO ES NEGATIVO SALTA A CONTRA2 ADDA #$7F ;SUMA 7F a A 7F + A=>A STAA VARERR ;CARGA "A" A LA VARIABLE VARERR BRA ACTUAL ;SALTA SIEMPRE A ACTUAL CONTRA2: NEGA ;REALIZA UN COMPLEMENTO AL ACUMULADOR A A*=>A TAB ;TRANSFIERE EL VALOR DE A a B A=>B LDAA #$7F ;CARGA EL ACUMULADOR A CON 7F SBA ;RESTA B a A A-B=>A STAA VARERR ;CARGA "A" A LA VARIABLE VARERR ACTUAL: MOVW ERR_ACT,ERR_ANT;MUEVE ERR_ACT =>ERR_ANT CLR ERR_ACT ;LIMPIA VARIABLE ERR_ACT CALL CLD ;LLAMA A CLD BRA LOOP ;BRINCA A CICLO INFINITO ;***************************************************************** ; CLD (CONTROLADOR LÓGICO DIFUSO) ;***************************************************************** CLD: FUZZIFY: LDX #INPUT_MFS;APUNTA A LAS DEFINICIONES DE FPS LDY #FUZ_INS;APUNTA A LAS ENTRADAS LDAA ERR;CARGA LA PRIMERA ENTRADA DEL SISTEMA LDAB #5;CARGA EL NUMERO DE ETIQUETAS GRAD_LOOP: MEM;EVALUA LA FP DBNE B, GRAD_LOOP;FORMA UN LAZO PARA FUZZIFICAR LAS 5 ETIQUETAS LDAA VARERR;TRAE LA SEGUNDA ENTRADA DEL SISTEMA LDAB #5;CARGA EL NUMERO DE ETIQUETAS GRAD_LOOP1: MEM;EVALUA LA FP DBNE B, GRAD_LOOP1;FORMA UN LAZO PARA FUZZIFICAR LAS 5 ETIQUETAS LDAB #5;5 SALIDAS DIFUSAS RULE_EVAL: CLR 1,Y+;LIMPIA SALIDAS E INCREMENTA EL APUNTADOR DBNE B, RULE_EVAL;FORMA UN LAZO PARA LIMPIAR LAS SALIDAS DIFUSAS ;ANTESDE COMENZARLA EVALUCION DE REGLAS LDX #RULE_START; APUNTA A LA PRIMERA REGLA LDY #FUZ_INS;APUNTA A ENTRADAS Y SALIDAS DIFUSAS LDAA #$FF;INICIA A Y LIMPIA BIT V REV;PROCESA LISTA DE REGLAS DEFUZ: LDY #FUZ_OUT;APUNTA A SALIDAS DIFUSAS LDX #SGLTN_POS;APUNTA A FPS TIPO BARRA LDAB #5;5 SALIDAS DIFUSAS POR SALIDA REAL WAV;SUMATORIA PARA PROMEDIO PONDERADO EDIV;DIVIDE POR SUMA PONDERADA TFR Y, D;;MUEVE RESULTADO A D STAB COG_OUT;ALMACENA SALIDA DEL SISTEMA STAB PWMDTY0;CARGA SALIDA AL PERIODO UTIL DEL PWM JSR DELAY;BRINCA A SUBRUTINA DELAY(RETRASO DE TIEMPO) RTC ;RETORNO DE LLAMADA
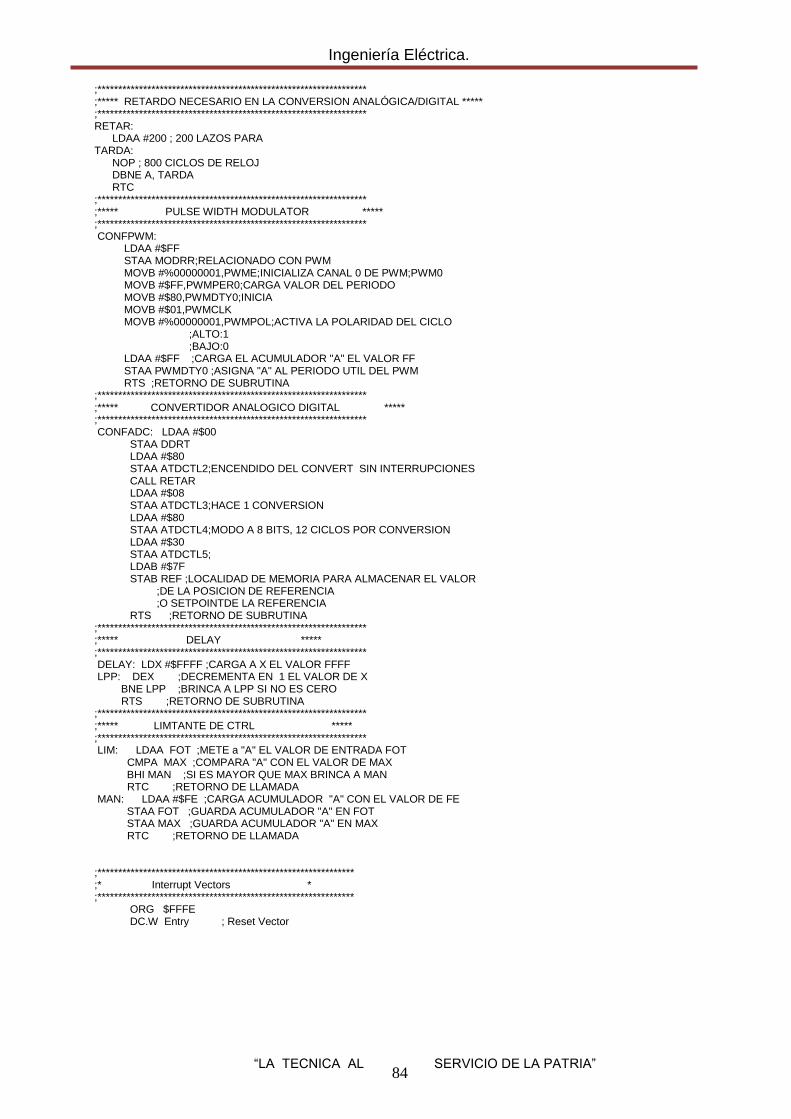
Ingeniería Eléctrica.
“LA TECNICA AL SERVICIO DE LA PATRIA” 84
;***************************************************************** ;***** RETARDO NECESARIO EN LA CONVERSION ANALÓGICA/DIGITAL ***** ;***************************************************************** RETAR: LDAA #200 ; 200 LAZOS PARA TARDA: NOP ; 800 CICLOS DE RELOJ DBNE A, TARDA RTC ;***************************************************************** ;***** PULSE WIDTH MODULATOR ***** ;***************************************************************** CONFPWM: LDAA #$FF STAA MODRR;RELACIONADO CON PWM MOVB #%00000001,PWME;INICIALIZA CANAL 0 DE PWM;PWM0 MOVB #$FF,PWMPER0;CARGA VALOR DEL PERIODO MOVB #$80,PWMDTY0;INICIA MOVB #$01,PWMCLK MOVB #%00000001,PWMPOL;ACTIVA LA POLARIDAD DEL CICLO ;ALTO:1 ;BAJO:0 LDAA #$FF ;CARGA EL ACUMULADOR "A" EL VALOR FF STAA PWMDTY0 ;ASIGNA "A" AL PERIODO UTIL DEL PWM RTS ;RETORNO DE SUBRUTINA ;***************************************************************** ;***** CONVERTIDOR ANALOGICO DIGITAL ***** ;***************************************************************** CONFADC: LDAA #$00 STAA DDRT LDAA #$80 STAA ATDCTL2;ENCENDIDO DEL CONVERT SIN INTERRUPCIONES CALL RETAR LDAA #$08 STAA ATDCTL3;HACE 1 CONVERSION LDAA #$80 STAA ATDCTL4;MODO A 8 BITS, 12 CICLOS POR CONVERSION LDAA #$30 STAA ATDCTL5; LDAB #$7F STAB REF ;LOCALIDAD DE MEMORIA PARA ALMACENAR EL VALOR ;DE LA POSICION DE REFERENCIA ;O SETPOINTDE LA REFERENCIA RTS ;RETORNO DE SUBRUTINA ;***************************************************************** ;***** DELAY ***** ;***************************************************************** DELAY: LDX #$FFFF ;CARGA A X EL VALOR FFFF LPP: DEX ;DECREMENTA EN 1 EL VALOR DE X BNE LPP ;BRINCA A LPP SI NO ES CERO RTS ;RETORNO DE SUBRUTINA ;***************************************************************** ;***** LIMTANTE DE CTRL ***** ;***************************************************************** LIM: LDAA FOT ;METE a "A" EL VALOR DE ENTRADA FOT CMPA MAX ;COMPARA "A" CON EL VALOR DE MAX BHI MAN ;SI ES MAYOR QUE MAX BRINCA A MAN RTC ;RETORNO DE LLAMADA MAN: LDAA #$FE ;CARGA ACUMULADOR "A" CON EL VALOR DE FE STAA FOT ;GUARDA ACUMULADOR "A" EN FOT STAA MAX ;GUARDA ACUMULADOR "A" EN MAX RTC ;RETORNO DE LLAMADA ;************************************************************** ;* Interrupt Vectors * ;************************************************************** ORG $FFFE DC.W Entry ; Reset Vector