escuela tÉcnica superior de ingenierÍa de...
TRANSCRIPT
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE SEVILLA
Modelo biomecánico
OpenSim de miembro
específico Proyecto Fin de Carrera
Presentado por:
Antonio López Iruzubieta
Dirigido por:
Dr. Juana María Mayo Nuñez
Romain Leberre
Sevilla, Diciembre de 2013

Índice
1 Introducción ....................................................................................................... 3
1.1 Objeto ......................................................................................................................... 3
1.2 Estado del arte ........................................................................................................ 3
2 Modelo geométrico ......................................................................................... 4
2.1 Datos de partida ..................................................................................................... 4
2.2 Procesado de tomogramas ................................................................................ 7
2.3 Procesado de modelos 3D ................................................................................13
3 Modelo cinemático ...................................................................................... 25
3.1 Formulación cinemática OpenSim ................................................................25
3.2 Definición de articulaciones ............................................................................28
4 Modelo dinámico .......................................................................................... 43
4.1 Modelo muscular .................................................................................................43
4.2 Parámetros musculares ....................................................................................45
4.3 Parámetros dinámicos musculares ..............................................................52
4.4 Parámetros inerciales ........................................................................................53
5 Conclusión ........................................................................................................ 55
6 Referencias ...................................................................................................... 56
7 Anexo ................................................................................................................... 57
7.1 Ángulos de Euler ..................................................................................................57
7.2 Archivos adjuntos ...............................................................................................58
3
1 Introducción
1.1 Objeto
El objeto de este proyecto es establecer una guía completa de cómo realizar un
modelo biomecánico genérico de cualquier conjunto músculo-esquelético de un
paciente a partir de imágenes obtenidas mediante Tomografía Axial Computerizada
(TAC).
El modelo construido será válido para el software libre de simulación biomecánica
OpenSim [1], desarrollado por la Universidad de Stanford y ampliamente utilizado la
comunidad científica internacional. OpenSim realiza análisis cinemáticos y dinámicos,
tanto inversos como directos, que nos permiten conocer mejor el comportamiento del
cuerpo humano cuando éste está en movimiento y/o bajo solicitación. Esto incluye el
cálculo de esfuerzos musculares.
Existe una amplia biblioteca de modelos generalistas para realizar simulaciones
biomecánicas en OpenSim. Sin embargo, si se requiere de un modelo biomecánico
específico para un paciente con características concretas y distintas a las definidas en
los modelos disponibles, los modelos existentes resultan inútiles. Es aquí donde reside
la principal motivación de este proyecto, que tiene como objetivo establecer una guía
práctica para la creación de un modelo músculo-esquelético de cualquier parte del
cuerpo humano.
Para ilustrar el proceso completo, en el proyecto se va a desarrollar el modelo de
una sola pierna (incluyendo la pelvis) con un implante en la rodilla.
1.2 Estado del arte
Hoy en día, debido a los riesgos para la salud que suponen las técnicas radiológicas
utilizadas para obtener información del comportamiento interno de nuestro cuerpo,
resulta muy complicado obtener datos experimentales de sujetos vivos. Por ello, la
estadounidense Edith Arnold, como parte de su investigación doctoral, creó un modelo
OpenSim genérico de los miembros inferiores del cuerpo humano (cadera y piernas) a
partir de datos obtenidos de veintiún cadáveres [2].
Aun no siendo un tamaño muestral que podamos considerar representativo, son los
datos más fiables de los que se dispone. Por tanto, este modelo constituirá la base a
partir de la cual se irá reconstruyendo el modelo objeto de este proyecto y se hará
referencia al mismo continuamente a lo largo de este documento.
4
2 Modelo geométrico
2.1 Datos de partida
El primer paso en la construcción de cualquier modelo mecánico consiste en crear
una geometría. Esta geometría generalmente es conocida, visible, medible fácilmente
con herramientas convencionales y, en muchos casos, estandarizada. De manera que
pueden ser reconstruidas, mediante herramientas de dibujo asistido por ordenador
(CAD), geometrías virtuales que representen fielmente la realidad.
Sin embargo, en biomecánica nos encontramos con la particularidad de que la
geometría de los modelos anatómicos está oculta bajo la piel, no siendo, por tanto,
medible con una regla. Es por eso por lo que se hace uso de técnicas radiológicas cada
vez más avanzadas para obtener imágenes de las estructuras internas del cuerpo.
Para el desarrollo de este trabajo se han utilizado imágenes obtenidas mediante
una técnica denominada Tomografía Axial Computerizada (TAC). Esta es una técnica
que utiliza rayos X para obtener cortes o secciones de objetos anatómicos. En lugar de
obtener una imagen de proyección, como la radiografía convencional, con un TAC
obtenemos múltiples imágenes al efectuar la fuente de rayos X y los detectores de
radiación movimientos de rotación alrededor del cuerpo. La representación final de la
imagen tomográfica se obtiene mediante la captura de las señales por los detectores y
su posterior proceso mediante algoritmos de reconstrucción.
Figura 2.1. Escáner de Tomografía Axial Computerizada (TAC) del hospital London Bridge.

5
Los datos de los que partimos en este proyecto han sido proporcionados por la
Universidad de Stanford, concretamente de la competición “Knee contact loads Grand
Competition Challenge” [3], que se viene celebrando desde 2010.
El objetivo de la competición es la estimación numérica “ciega” de las fuerzas de
contacto de la articulación tibiofemoral de la pierna de un sujeto durante un ciclo de
marcha. El sujeto estudiado tiene un implante en la rodilla dotado de unas células de
carga situadas entre las superficies de contacto de los implantes tibial y femoral que
permiten obtener medidas de las fuerzas de contacto.
La Universidad de Stanford proporciona una amplia base de datos para el desarrollo
del modelo. Contiene imágenes de tomografía del paciente, geometría CAD de los
implantes, así como imágenes de fluoroscopia, datos de estereofotogrametría,
medidas de fuerzas de reacción con el suelo, medidas experimentales de fuerzas de
contacto tibiofemoral, medidas de electromiografía (EMG) y medidas de calibración
con dinamómetro BIODEX para una amplia gama de movimientos de marcha a
diferentes velocidades.
Sin embargo, la mayoría de estos datos no son necesarios para generar un modelo
genérico como se pretende en este proyecto. Solo se hará uso de los siguientes datos:
- Imágenes tomográficas. Necesarias para la reconstrucción de la estructura ósea.
- Geometría CAD de la prótesis. Geometrías de implantes tibial, femoral y rotular.
- Imágenes de fluoroscopia. Necesarias para definir las restricciones de la
articulación tibiofemoral (se verá más adelante).
Para el desarrollo del modelo tomaremos los datos del sujeto de la tercera edición
de la competición, que tuvo lugar en 2012. Las características del paciente son las
siguientes:
- Sujeto: SC (hace referencia a las iniciales del paciente)
- Altura: 167 cm.
- Peso: 78.4 kg.
- Género: Femenino.
- Rodilla operada: Izquierda.
Por tanto, el modelo biomecánico creado en este proyecto será una pierna
izquierda con una prótesis en la rodilla.
Disponemos de un total de tomogramas, en escala de grises, que recorren la
parte izquierda del cuerpo del sujeto desde los pies hasta la cadera con una separación
entre cortes de 0.67 mm, lo que hace que la longitud total recorrida sea de 1021.82
mm.

6
El tamaño de cada imagen es de 512 x 512 píxeles, dónde cada píxel equivale a 0.57
mm. Por tanto, el tamaño real de la imagen es de 291.84 x 291.84 mm.
Las imágenes están comprimidas en archivos con formato DICOM (Digital Imaging
and Communication in Medicine), que es el estándar reconocido mundialmente para el
intercambio de imágenes médicas.
Debido a los implantes realizados en la articulación tibio-femoral del sujeto, se
producen distorsiones en las imágenes de TAC, lo que dificulta enormemente el
proceso de identificación y segmentación.
Es por esto por lo que, además de estas imágenes en las que el paciente ya tiene
realizado el implante, disponemos de tomogramas obtenidos antes de la operación del
fémur sano. Tienen las mismas características que las anteriores y muestran cortes
desde 210 mm por debajo de la rodilla hasta 210 mm por encima. Con estas imágenes
conseguimos representar los cuerpos óseos en los que han sido implantadas las
prótesis (rótula, fémur y tibia).
Con todos estos datos seremos capaces de reconstruir todos los huesos de la pierna
exceptuando los metatarsos y las falanges del pie, ya que la tomografía se realizó
desde el tobillo hasta la cadera. Sin embargo, incorporaremos a nuestro modelo la
geometría de estos huesos a partir del modelo de Romain [4] para tener un modelo
completo.
Los huesos a segmentar y reconstruir son por tanto:
- Pelvis (mitad izquierda).
- Fémur.
- Rótula.
- Tibia.
- Peroné.
- Astrágalo.
- Calcáneo.

7
2.2 Procesado de tomogramas
Las imágenes obtenidas por TAC permiten una identificación claro de los cuerpos
óseos (más densos) frente al resto de tejidos musculares (menos densos), excepto en
la zona implantada, como se puede apreciar en las siguientes imágenes:
Figura 2.2. Tomograma de la cadera (pelvis).
Figura 2.3. Tomograma de la rodilla (rótula, fémur e implante femoral).

8
Figura 2.4. Tomograma de la parte inferior de la pierna (tibia y peroné).
Dada la simetría del cuerpo humano, puede parecer que estos cortes se
corresponden con la parte derecha del sujeto. Sin embargo, hay que tener en cuenta
que el escáner por TAC recorre el cuerpo desde los pies hacia la cabeza, y por tanto,
estas imágenes deben ser visualizadas desde esa perspectiva.
Para poder obtener la estructura ósea de los tomogramas haremos uso de un
proceso denominado segmentación. El objetivo de la segmentación es simplificar y/o
cambiar la representación de una imagen en otra más significativa y más fácil de
analizar. La segmentación se usa tanto para localizar objetos como para encontrar los
límites de estos dentro de una imagen.
Una vez segmentadas todas las imágenes se puede proceder a la reconstrucción 3D
del objeto deseado. Para realizar este proceso emplearemos una potente herramienta
llamada Simpleware ScanIP.
Para no ser reiterativos, y a modo de ejemplo, se describirá el proceso completo
para el fémur (incluyendo el implante femoral), siendo análogo para el resto de
huesos.
Debido a la dificultad que encontramos para segmentar los tomogramas en la zona
implantada, reconstruiremos el fémur en tres fases:
- Postoperatorio: Reconstrucción del fémur desde la parte superior hasta la zona
donde comienza a aparecer la distorsión producida por el implante femoral.

9
- Implante femoral: Reconstrucción aproximada de la prótesis para tener una
referencia a la hora de situar la geometría CAD del implante en su posición
exacta.
- Preoperatorio: Reconstrucción de la parte inferior del fémur afectada por la
distorsión a partir del fémur sano, para su posterior unión.
El proceso de segmentación seguido para las tres fases será análogo y se describe a
continuación para el postoperatorio:
2.2.1 Preparación de los tomogramas.
En primer lugar, para agilizar el proceso y reducir el coste computacional, es
importante tomar solo los cortes en los que aparezca el hueso que queremos
segmentar, así como recortar las imágenes para centrarnos en la zona de interés. En el
caso del fémur, importamos solo 103 tomogramas con un tamaño de 245 x 220
píxeles, con lo que ahorramos más de un 80% de memoria.
2.2.2 Algoritmo de segmentación
Para realizar una primera segmentación haremos uso de un método simple
implementado en ScanIP, denominado “Thresholding” (Método del Umbral), que
realiza un filtro por intensidad, siendo los píxeles blancos los más intensos y los negros
los menos. En una primera aproximación, haremos un filtrado superior para que la
región segmentada se corresponda con los píxeles más claros del contorno del hueso
(ver figuras 2.2, 2.3 y 2.4).
Figura 2.5. Tomogramas tras segmentación por algoritmo Threshold.

10
Tras esta primera aproximación, observamos una identificación aceptable en la
parte superior del fémur y muy satisfactoria de la zona media (figura 2.5).
2.2.3 Limpieza de imágenes
Una vez aplicado el algoritmo de Threshold, es el momento de limpiar el ruido, es
decir, todos los píxeles segmentados que no pertenecen al fémur. Además, debemos
cerrar todo el perímetro del hueso para su posterior llenado. Para ello, haremos uso de
la herramienta “Paint” que nos permitirá “pintar” (segmentar) manualmente con el
puntero del ratón tomograma por tomograma, lo cual resulta un trabajo tedioso, pero
necesario para obtener buenos resultados.
2.2.4 Algoritmo de llenado
Ya tenemos la superficie del fémur, ahora solo resta darle volumen llenando esta
superficie. ScanIP dispone para esta tarea del algoritmo CavityFill, que permite llenar la
geometría completa de nuestro objeto haciendo un solo “click”.
Figura 2.6. Tomogramas tras llenado y eliminación de ruido.
Tras este último paso, la segmentación está completada y nuestro objeto
perfectamente definido. Solo resta generar la geometría 3D.

11
2.2.5 Generación de geometría 3D
Finalmente, haciendo uso del filtro “Recursive Gaussian Filter” para suavizar la
superficie del objeto, generamos la geometría 3D. Los resultados obtenidos se
muestran a continuación:
Figura 2.7. Modelos 3D del fémur (exceptuando zona implantada).
12
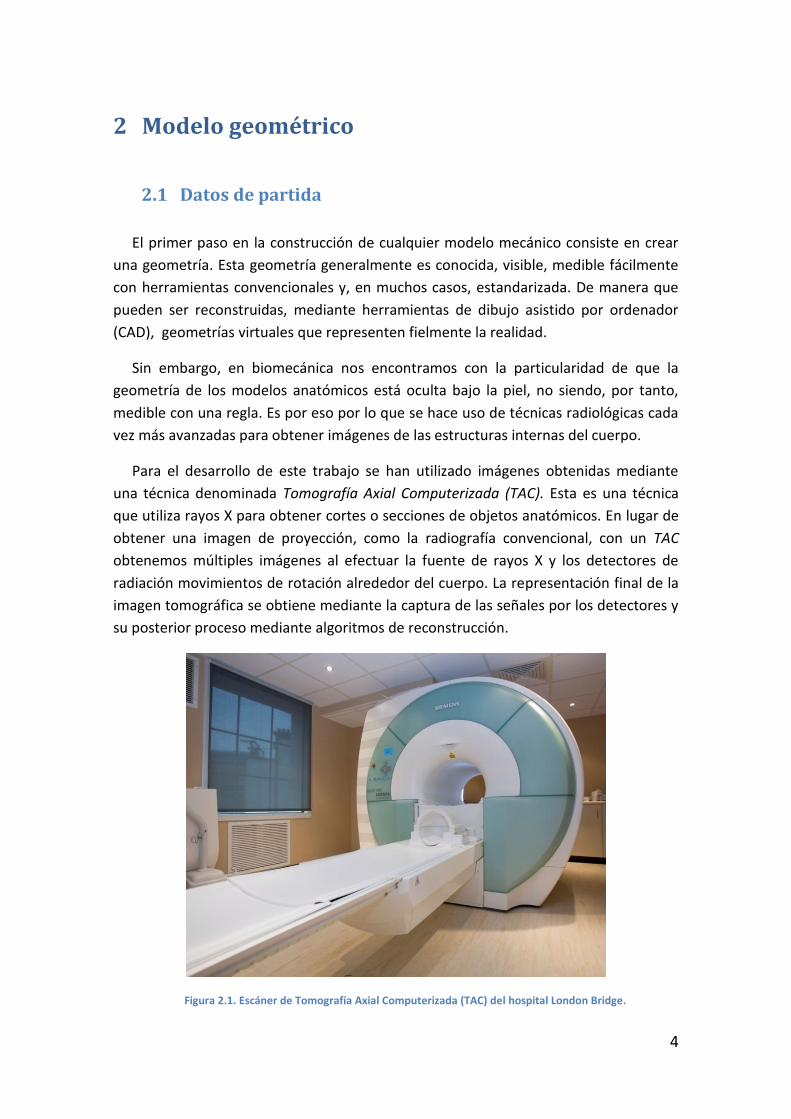
Aquí finaliza el proceso de segmentación y reconstrucción 3D. Este procedimiento
se sigue análogamente para las otras dos fases: implante femoral y preoperatorio
(parte inferior del fémur).
Figura 2.8. Modelos 3D del implante femoral y parte inferior del fémur
También, por supuesto, para el resto de huesos de los que se compone la pierna y
tenemos datos.
2.2.6 Exportación
La exportación se realiza en formato STL (STereo Lithography), un formato de CAD
que define exclusivamente la geometría de objetos 3D, excluyendo información como
color, texturas o propiedades físicas que sí incluyen otros formatos CAD. Este es el
mismo formato en el que están disponibles los modelos CAD de los implantes.

13
2.3 Procesado de modelos 3D
Llegados a este punto nuestro modelo ya va cobrando forma, pero todavía
debemos realizar algunos ajustes sobre los modelos generados para lograr un modelo
esquelético completo con el que poder empezar a trabajar con Opensim.
Para gestionar y editar los modelos 3D haremos uso de un potente software de
procesamiento 3D llamado Geomagic Studio. Este programa ofrece multitud de
herramientas con las que podremos manipular los modelos a nuestro antojo de
manera sencilla e intuitiva.
2.3.1 Edición de modelos
A continuación se muestran los modelos STL de los que disponemos importados a
Geomagic, tanto los generados por segmentación como las geometrías CAD de la
prótesis (implante tibial, femoral y rotular).
Figura 2.9. Modelos 3D importados a Geomagic.

14
En primer lugar, realizaremos modificaciones en cada modelo por separado para,
posteriormente, ensamblarlos todos en un solo conjunto.
2.3.1.1 Pelvis
A partir de los tomogramas solo fuimos capaces de reconstruir la mitad de la
geometría de la pelvis. Sin embargo, podemos completarla fácilmente generando un
modelo simétrico para luego fusionar ambos y obtener la geometría completa. Para
ello, se define un plano de simetría que contenga la superficie central seccionada y se
realiza la simetría (herramienta “Espejo”) del modelo obtenido mediante ScanIP
respecto a dicho plano. Finalmente, ambos modelos, el inicial y el simétrico se
fusionan en un solo objeto mediante la herramienta “Combinar”.
Figura 2.10. Pelvis antes y después de realizar el simétrico.
2.3.1.2 Fémur e implante femoral
El proceso de segmentación del fémur, como se describió en el apartado anterior,
se realizó en tres fases. En la primera se obtuvo la parte proximal del fémur (no
implantada), en la segunda se añadió en este mismo modelo la geometría aproximada
del implante femoral, y en la última obtuvimos la parte distal del fémur sano.
El proceso de reconstrucción del fémur y el implante femoral se divide en varias
fases:
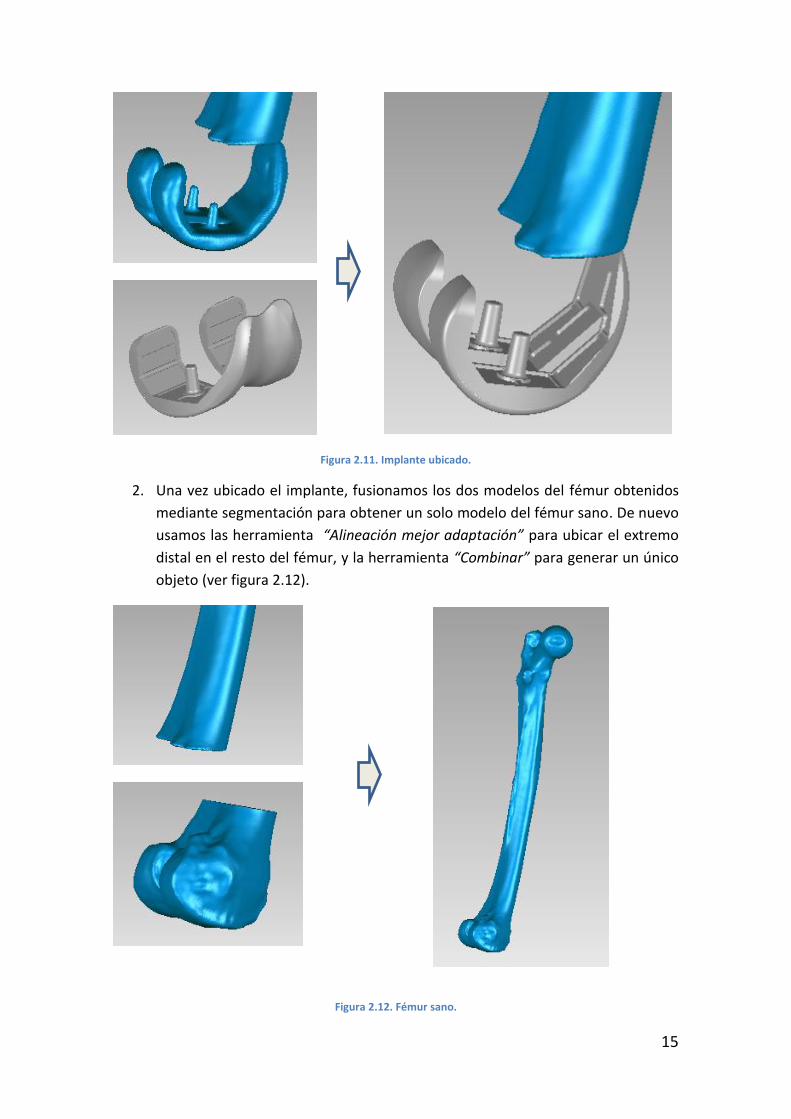
1. Lo primero que haremos será ubicar el modelo CAD del componente femoral de
la prótesis en el fémur, para ello nos apoyamos en la segmentación aproximada
del mismo. La herramienta “Alineación mejor adaptación” nos permite alinear el
modelo CAD con la geometría aproximada del implante obtenida por
segmentación, ubicándolo en su posición exacta. Una vez ubicado el modelo
CAD del implante, eliminamos la geometría aproximada del implante del
modelo del fémur (ver figura 2.11).
15
Figura 2.11. Implante ubicado.
2. Una vez ubicado el implante, fusionamos los dos modelos del fémur obtenidos
mediante segmentación para obtener un solo modelo del fémur sano. De nuevo
usamos las herramienta “Alineación mejor adaptación” para ubicar el extremo
distal en el resto del fémur, y la herramienta “Combinar” para generar un único
objeto (ver figura 2.12).
Figura 2.12. Fémur sano.

16
3. Para acoplar el implante al fémur es necesario realizar una operación de
seccionamiento en el extremo distal de este. Realizamos la operación “virtual”
definiendo los planos de corte a partir de las diferentes superficies de contacto
fémur-implante. La herramienta “Recortar con plano” nos permite seccionar el
fémur a partir de los planos previamente definidos (ver figura 2.13).
Figura 2.13. Fémur operado e implantado.
2.3.1.3 Rótula e implante rotular
En este caso solo es necesario ubicar el implante en la rótula ya que la geometría de
esta última se obtuvo de los tomogramas del sujeto ya operado y no es necesario
realizar ninguna modificación en ella. Una vez ubicado, unificamos ambos modelos.

17
Figura 2.14. Rótula implantada.
2.3.1.4 Tibia, peroné e implante tibial
La misma operación que en el apartado anterior se aplica a la tibia y su
correspondiente implante. Además tibia y peroné se combinarán para formar un único
modelo STL, ya que ambos se comportan como un único sólido rígido.
Figura 2.15. Tibia implantada.
2.3.1.5 Astrágalo, calcáneo, metatarsos y falanges
Del conjunto de huesos del pie solo hemos sido capaces de reconstruir el astrágalo
y el calcáneo. Sin embargo, importaremos el resto de huesos del modelo realizado por
Romain Laberre [4], cuyas características son similares a las de nuestro modelo (168
cm de altura), con la diferencia de que se trata de un modelo de pierna derecha.
Para adaptar los metatarsos y falanges a nuestro modelo aplicaremos simetría al
conjunto de huesos del pie (incluyendo calcáneo) del modelo de Romain, para luego
alinear ambos calcáneos.
El astrágalo no sufrirá ninguna modificación en este punto, al modelo del calcáneo
le añadiremos el conjunto de metatarsos importados para que formen un único
conjunto y el conjunto de falanges conformarán otro modelo independiente.

18
Figura 2.16. Los tres modelos que componen el pie.
En resumen, el modelo final de pierna izquierda se compone de diez objetos que
representan diez sólidos independientes en diez ficheros STL diferentes:
- Pelvis: pelvis.stl
- Fémur: femur.stl
- Implante femoral: femur_implant.stl
- Rótula: patella.stl
- Implante tibial: tibia_implant.stl
- Tibia y peroné: tibia.stl
- Astrágalo: talus.stl
- Calcáneo y metatarsos: foot.stl
- Falanges: dedos.stl
El conjunto de los diez modelos se guarda como un archivo .WRP específico de
Geomagic para gestionar posteriormente la coordinación de sistemas.
Tenemos completamente definida la “apariencia” de nuestro modelo y estamos en
disposición de comenzar a definir sistemas de referencia para la creación del modelo
cinemático.
Figura 2.17. Modelo de pierna izquierda completo.
19
2.3.2 Coordinación de sólidos
Para definir el sistema de referencia local de cada sólido nos basaremos en las
recomendaciones dadas en un artículo del Public Health Reports [5] y en el modelo de
Arnold [2]. El fundamento de estas recomendaciones es simplificar la posterior
definición de las articulaciones del modelo.
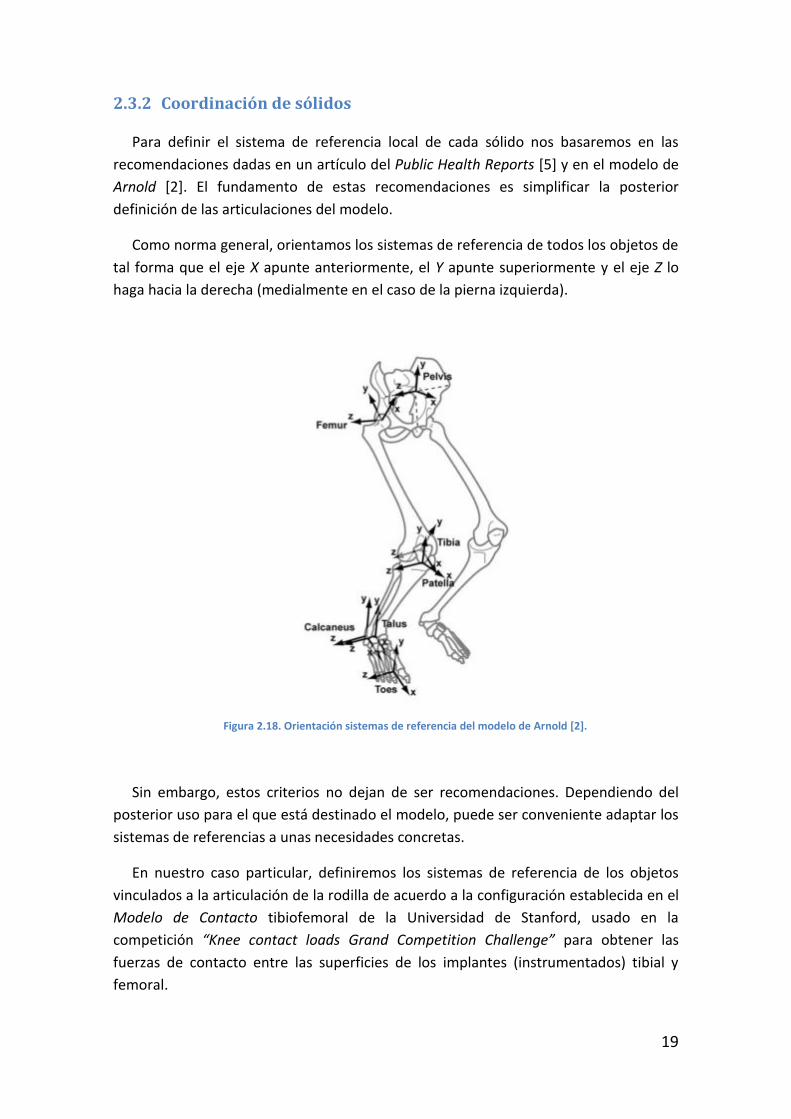
Como norma general, orientamos los sistemas de referencia de todos los objetos de
tal forma que el eje X apunte anteriormente, el Y apunte superiormente y el eje Z lo
haga hacia la derecha (medialmente en el caso de la pierna izquierda).
Figura 2.18. Orientación sistemas de referencia del modelo de Arnold [2].
Sin embargo, estos criterios no dejan de ser recomendaciones. Dependiendo del
posterior uso para el que está destinado el modelo, puede ser conveniente adaptar los
sistemas de referencias a unas necesidades concretas.
En nuestro caso particular, definiremos los sistemas de referencia de los objetos
vinculados a la articulación de la rodilla de acuerdo a la configuración establecida en el
Modelo de Contacto tibiofemoral de la Universidad de Stanford, usado en la
competición “Knee contact loads Grand Competition Challenge” para obtener las
fuerzas de contacto entre las superficies de los implantes (instrumentados) tibial y
femoral.
20
La coordinación de los segmentos se puede llevar a cabo fácilmente mediante
Geomagic. La herramienta “Coordinar sistemas” nos permite definir un sistema de
coordenadas local para cada sólido (archivo STL). Sin embargo, el sistema de referencia
que queda registrado en el archivo STL de cada objeto es el global. Por tanto, para que
el nuevo sistema local creado se corresponda con el global y, por tanto, quede
guardado, debemos hacer uso de la herramienta “Alinear con CSYS activo” dentro del
sistema local creado. Si el sistema activo en ese momento es el global (World CSYS), el
nuevo sistema de referencia local se alineará con el global, siendo ahora el sistema
global el deseado como sistema local del objeto.
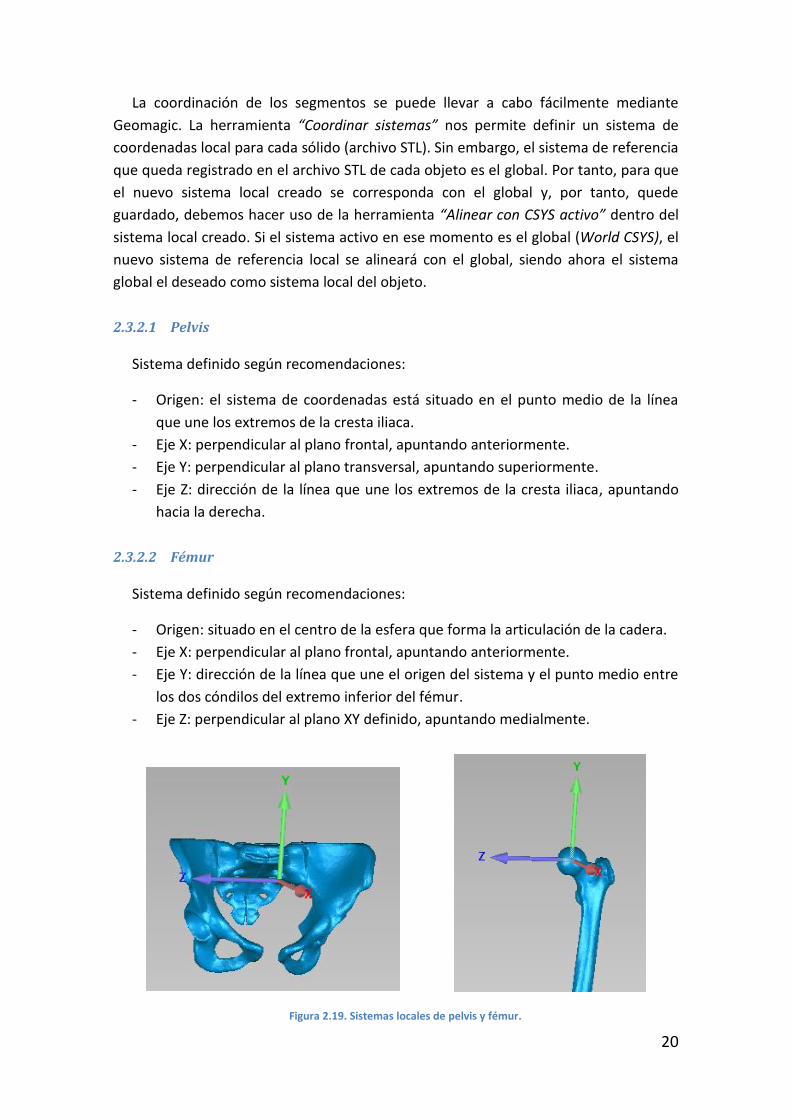
2.3.2.1 Pelvis
Sistema definido según recomendaciones:
- Origen: el sistema de coordenadas está situado en el punto medio de la línea
que une los extremos de la cresta iliaca.
- Eje X: perpendicular al plano frontal, apuntando anteriormente.
- Eje Y: perpendicular al plano transversal, apuntando superiormente.
- Eje Z: dirección de la línea que une los extremos de la cresta iliaca, apuntando
hacia la derecha.
2.3.2.2 Fémur
Sistema definido según recomendaciones:
- Origen: situado en el centro de la esfera que forma la articulación de la cadera.
- Eje X: perpendicular al plano frontal, apuntando anteriormente.
- Eje Y: dirección de la línea que une el origen del sistema y el punto medio entre
los dos cóndilos del extremo inferior del fémur.
- Eje Z: perpendicular al plano XY definido, apuntando medialmente.
Figura 2.19. Sistemas locales de pelvis y fémur.
21
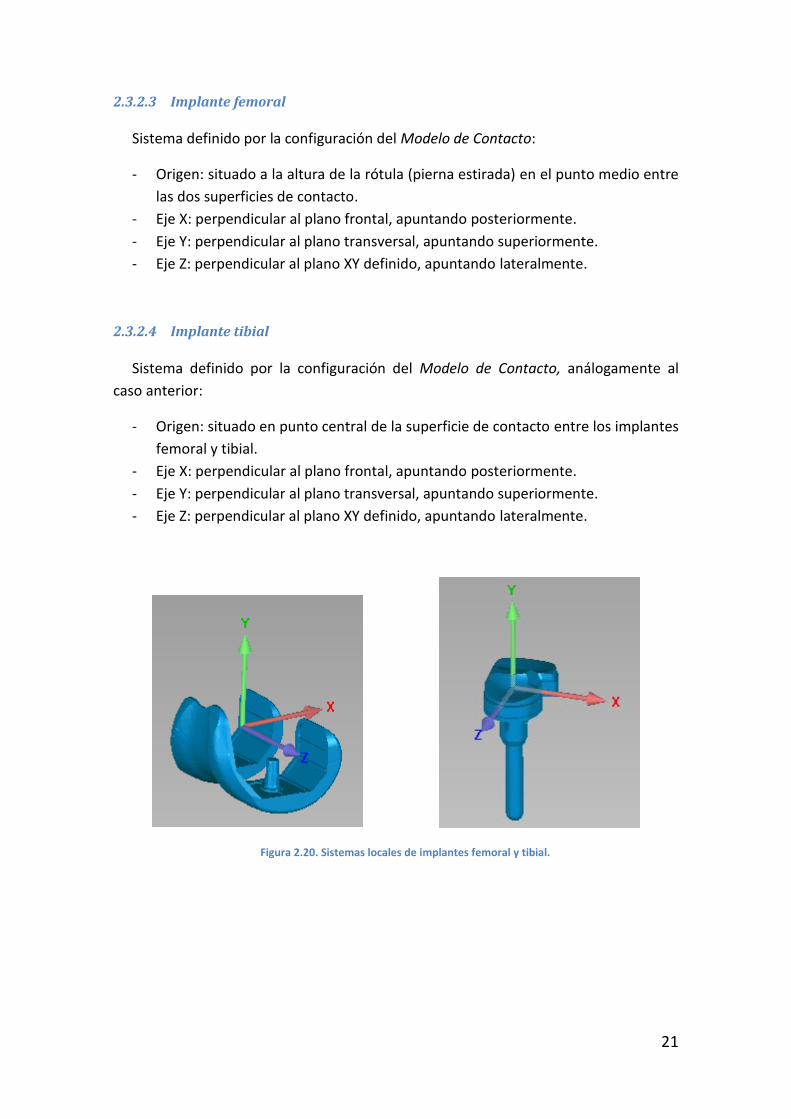
2.3.2.3 Implante femoral
Sistema definido por la configuración del Modelo de Contacto:
- Origen: situado a la altura de la rótula (pierna estirada) en el punto medio entre
las dos superficies de contacto.
- Eje X: perpendicular al plano frontal, apuntando posteriormente.
- Eje Y: perpendicular al plano transversal, apuntando superiormente.
- Eje Z: perpendicular al plano XY definido, apuntando lateralmente.
2.3.2.4 Implante tibial
Sistema definido por la configuración del Modelo de Contacto, análogamente al
caso anterior:
- Origen: situado en punto central de la superficie de contacto entre los implantes
femoral y tibial.
- Eje X: perpendicular al plano frontal, apuntando posteriormente.
- Eje Y: perpendicular al plano transversal, apuntando superiormente.
- Eje Z: perpendicular al plano XY definido, apuntando lateralmente.
Figura 2.20. Sistemas locales de implantes femoral y tibial.
22
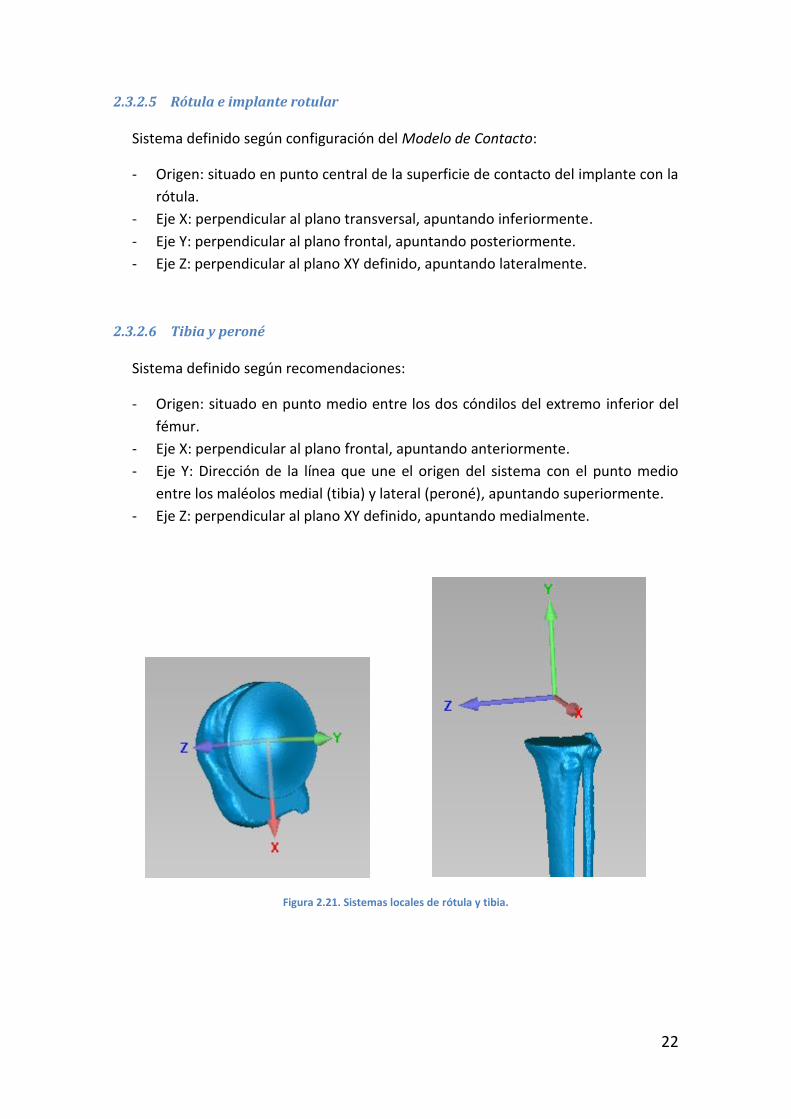
2.3.2.5 Rótula e implante rotular
Sistema definido según configuración del Modelo de Contacto:
- Origen: situado en punto central de la superficie de contacto del implante con la
rótula.
- Eje X: perpendicular al plano transversal, apuntando inferiormente.
- Eje Y: perpendicular al plano frontal, apuntando posteriormente.
- Eje Z: perpendicular al plano XY definido, apuntando lateralmente.
2.3.2.6 Tibia y peroné
Sistema definido según recomendaciones:
- Origen: situado en punto medio entre los dos cóndilos del extremo inferior del
fémur.
- Eje X: perpendicular al plano frontal, apuntando anteriormente.
- Eje Y: Dirección de la línea que une el origen del sistema con el punto medio
entre los maléolos medial (tibia) y lateral (peroné), apuntando superiormente.
- Eje Z: perpendicular al plano XY definido, apuntando medialmente.
Figura 2.21. Sistemas locales de rótula y tibia.

23
2.3.2.7 Astrágalo
Sistema definido según recomendaciones:
- Origen: situado en el punto medio de un cilindro creado a partir de la superficie
superior del astrágalo.
- Eje X: perpendicular al plano frontal, apuntando anteriormente.
- Eje Y: Dirección de la línea que une el origen del sistema con el punto medio
entre los maléolos medial (tibia) y lateral (peroné), apuntando superiormente.
- Eje Z: Dirección del eje del cilindro definido previamente, apuntando
medialmente.
Figura 2.22. Sistema local del astrágalo.
2.3.2.8 Calcáneo y metatarsos
Sistema definido según recomendaciones:
- Origen: situado en el extremo posterolateral del calcáneo.
- Eje X: perpendicular al plano frontal, apuntando anteriormente.
- Eje Y: perpendicular al plano transversal, apuntando superiormente.
- Eje Z: perpendicular al plano XY definido, apuntando medialmente.
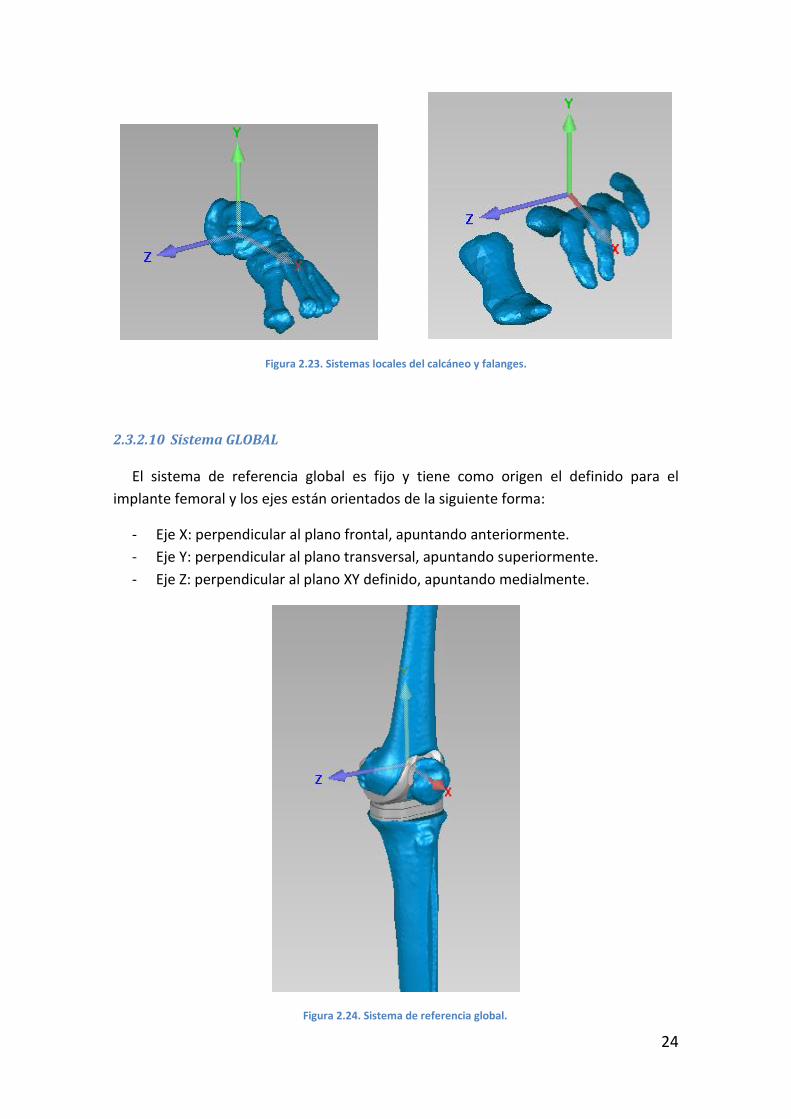
2.3.2.9 Falanges
Sistema definido según recomendaciones:
- Origen: situado en el extremo anterior del tercer metatarso.
- Eje X: perpendicular al plano frontal, apuntando anteriormente.
- Eje Y: perpendicular al plano transversal, apuntando superiormente.
- Eje Z: perpendicular al plano XY definido, apuntando medialmente.
24
Figura 2.23. Sistemas locales del calcáneo y falanges.
2.3.2.10 Sistema GLOBAL
El sistema de referencia global es fijo y tiene como origen el definido para el
implante femoral y los ejes están orientados de la siguiente forma:
- Eje X: perpendicular al plano frontal, apuntando anteriormente.
- Eje Y: perpendicular al plano transversal, apuntando superiormente.
- Eje Z: perpendicular al plano XY definido, apuntando medialmente.
Figura 2.24. Sistema de referencia global.

25
3 Modelo cinemático
Llegados a este punto, el modelo geométrico de la pierna está completamente
definido y los diferentes huesos y componentes implantados debidamente
referenciados, tanto local como globalmente.
Estamos en disposición pues de definir el modelo cinemático de la pierna, es decir,
definir las distintas articulaciones según la formulación usada por OpenSim.
3.1 Formulación cinemática OpenSim
La cinemática de los modelos sigue un esquema en árbol en el que los huesos se
relacionan entre sí como “parent – child” (padre – hijo). Esto es, cada cuerpo “child” se
moverá relativamente al cuerpo “parent”.
El suelo (ground) será definido como la referencia global a partir del cual se
definirán el resto de cuerpos, desde la pelvis hasta el conjunto de falanges. Por
ejemplo, el suelo será el padre de la pelvis y esta, a su vez, será padre del fémur, y así
sucesivamente.
Figura 3.1. Relación Parent-Child.
Como se puede observar en la figura, es posible definir nuevos sistemas de
referencia en cada cuerpo para relacionarlos y definir las articulaciones entre ellos. Sin
embargo, esto no será necesario en nuestro caso al haber situado previamente los
sistemas locales en las posiciones más adecuadas para la definición de las
articulaciones.
26
Para establecer la posición del hijo respecto al padre será necesario definir seis
coordenadas: tres de traslación y tres de rotación.
- Location in parent: 3 traslaciones X, Y, Z del hijo respecto al padre.
- Orientation in parent: 3 ángulos de rotación de Euler (ver Anexo) del hijo
respecto al padre.
Por otro lado, existen varios tipos de articulaciones predefinidas en OpenSim que se
resumen a continuación:
1. WeldJoint: Se trata de una unión totalmente rígida que restringe todos los
grados de libertad. “Fusiona” los cuerpos.
2. PinJoint: Permite la rotación de los cuerpos alrededor del eje Z.
3. SliderJoint: Permite el desplazamiento a lo largo del eje X.
4. BallJoint: Permite las tres rotaciones (X, Y, Z) del hijo en el padre.
5. FreeJoint: Ningún movimiento impedido, las tres rotaciones y los tres
desplazamientos del hijo respecto al padre son libres.
6. CustomJoint: Permite al usuario personalizar la articulación.
Para simplificar se usarán únicamente las articulaciones WeldJoint y CustomJoint.
Además de estas articulaciones predefinidas, es posible crear restricciones
(Constraints) que creen relaciones de dependencia entre distintos grados de libertad.
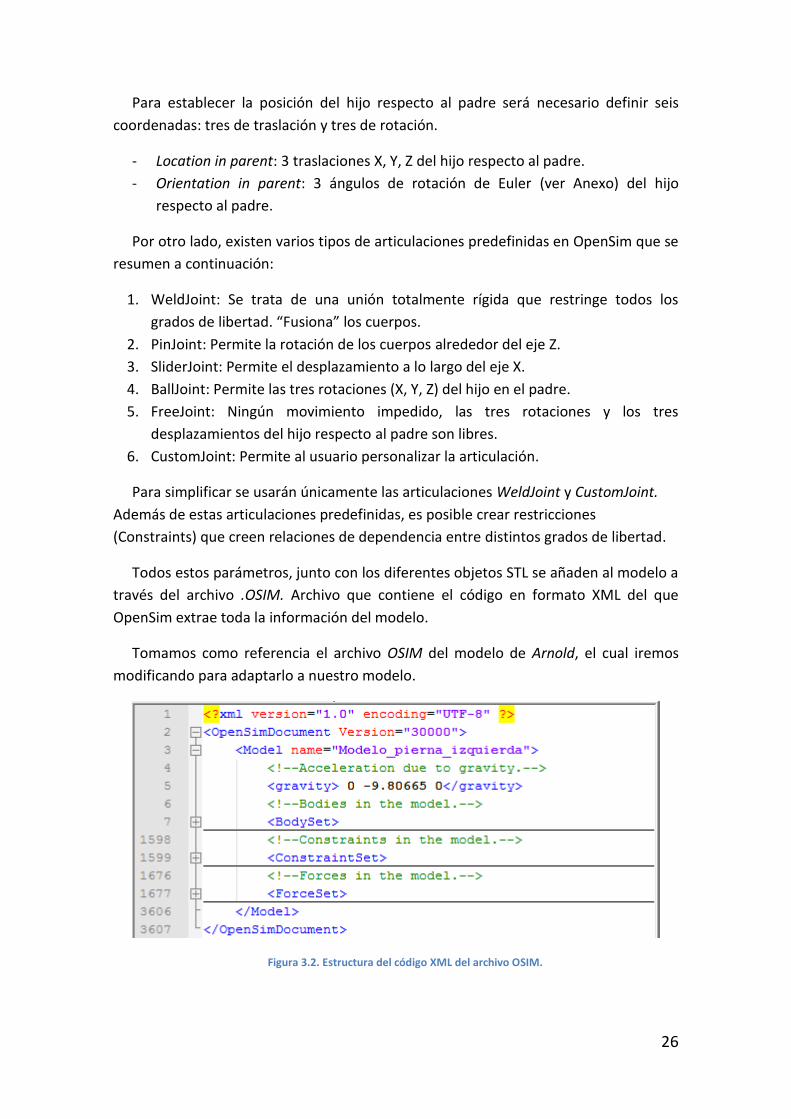
Todos estos parámetros, junto con los diferentes objetos STL se añaden al modelo a
través del archivo .OSIM. Archivo que contiene el código en formato XML del que
OpenSim extrae toda la información del modelo.
Tomamos como referencia el archivo OSIM del modelo de Arnold, el cual iremos
modificando para adaptarlo a nuestro modelo.
Figura 3.2. Estructura del código XML del archivo OSIM.
27
Como se puede observar en la Figura 26, el código del modelo OpenSim se
estructura en tres grandes secciones: “BodySet”, “ConstraintSet” y “ForceSet”.
- BodySet: en esta sección se definen todos los segmentos que compondrán el
modelo (archivos STL), su geometría (archivos STL) y sus parámetros inerciales,
así como las relaciones “parent – child” y las diferentes articulaciones.
- ConstraintSet: se establecen restricciones cinemáticas entre distintos grados de
libertad de las articulaciones. Esta sección puede omitirse ya que las
restricciones cinemáticas también se pueden definir dentro de la sección
BodySet.
- ForceSet: por último se definen las unidades musculares incluidas en el modelo,
incluyendo puntos de inserción y parámetros dinámicos.
Otra sección común dentro de un modelo OpenSim es “MarkerSet” que incluiría el
conjunto de marcadores que incorpora el modelo para la toma de medidas
experimentales. Sin embargo, esto está fuera del alcance de este proyecto y no se
incluyen.
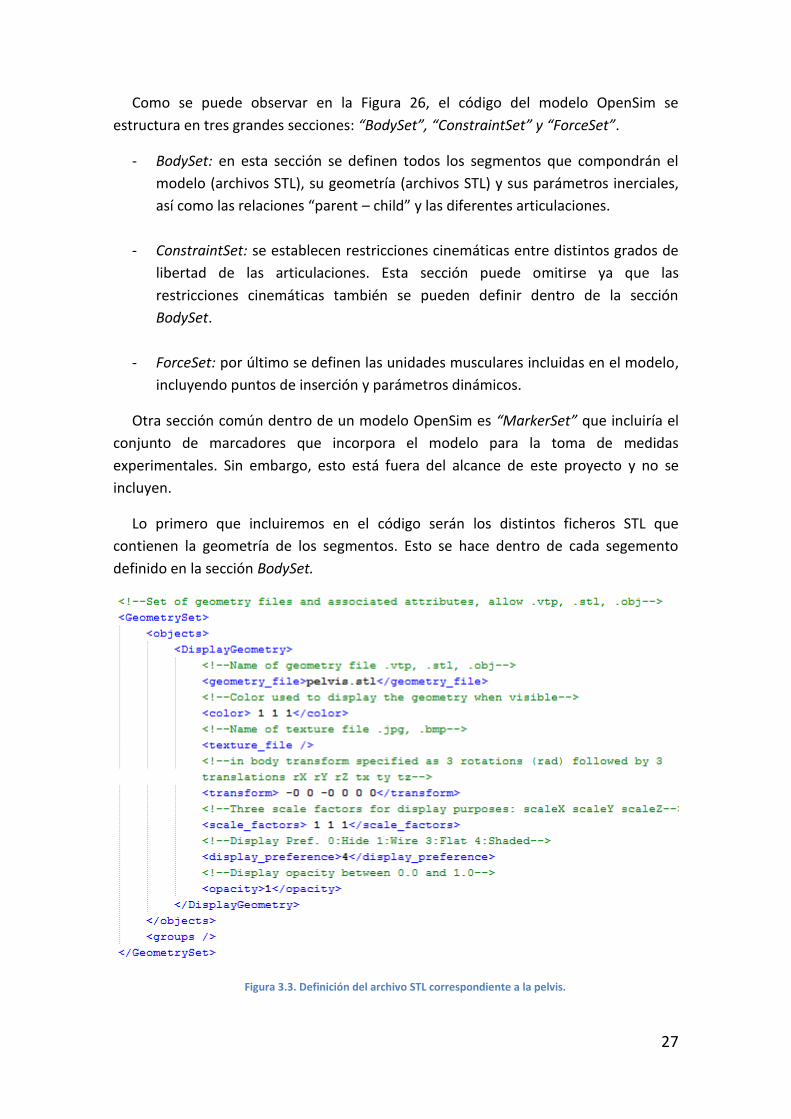
Lo primero que incluiremos en el código serán los distintos ficheros STL que
contienen la geometría de los segmentos. Esto se hace dentro de cada segemento
definido en la sección BodySet.
Figura 3.3. Definición del archivo STL correspondiente a la pelvis.

28
Los archivos STL deberán ser incluidos en una carpeta llamada “Geometry”
contenida en la misma carpeta que el archivo OSIM.
3.2 Definición de articulaciones
Para definir la posición y orientación de las articulaciones seguimos el siguiente
proceso generalizado:
1. Obtenemos la posición (tres traslaciones) y orientación (tres ángulos de Euler)
de los sistemas locales de padre e hijo respecto al sistema global de referencia
mediante Geomagic, a partir de las posiciones definidas en la Figura 2.17 del
capítulo anterior. Para este propósito hacemos uso del archivo .WRP creado
previamente.
La traslación se obtiene definiendo el origen del sistema local de cada
segmento como un “rasgo” tipo punto. Si el sistema de coordenadas activo es el
global, la traslación del sistema local respecto al global se
obtiene a partir de las propiedades del rasgo tipo punto.
Por otro lado, para obtener los ángulos de Euler no encontramos ninguna
herramienta que permita su cálculo automático, es por eso que recurrimos a un
método manual. El método consiste en hacer coincidir los orígenes del sistema
local y el global para alinear manualmente los ejes de ambos sistemas rotando
los del sistema global. Los ángulos girados por el sistema global
( ) son los ángulos de Euler que definen la rotación del sistema local
respecto al global.
( )
2. Construimos la matriz de rotación de padre e hijo:
[
]
3. La posición relativa del hijo respecto al padre viene dada por:
29
( )
4. Finalmente la orientación:
De este modo queda definida la posición del objeto hijo respecto al objeto padre
según la formulación de OpenSim. Gracias a este procedimiento estándar es posible
programar mediante MATLAB una función que obtenga rápidamente todas las
posiciones iniciales de las articulaciones que requiramos.
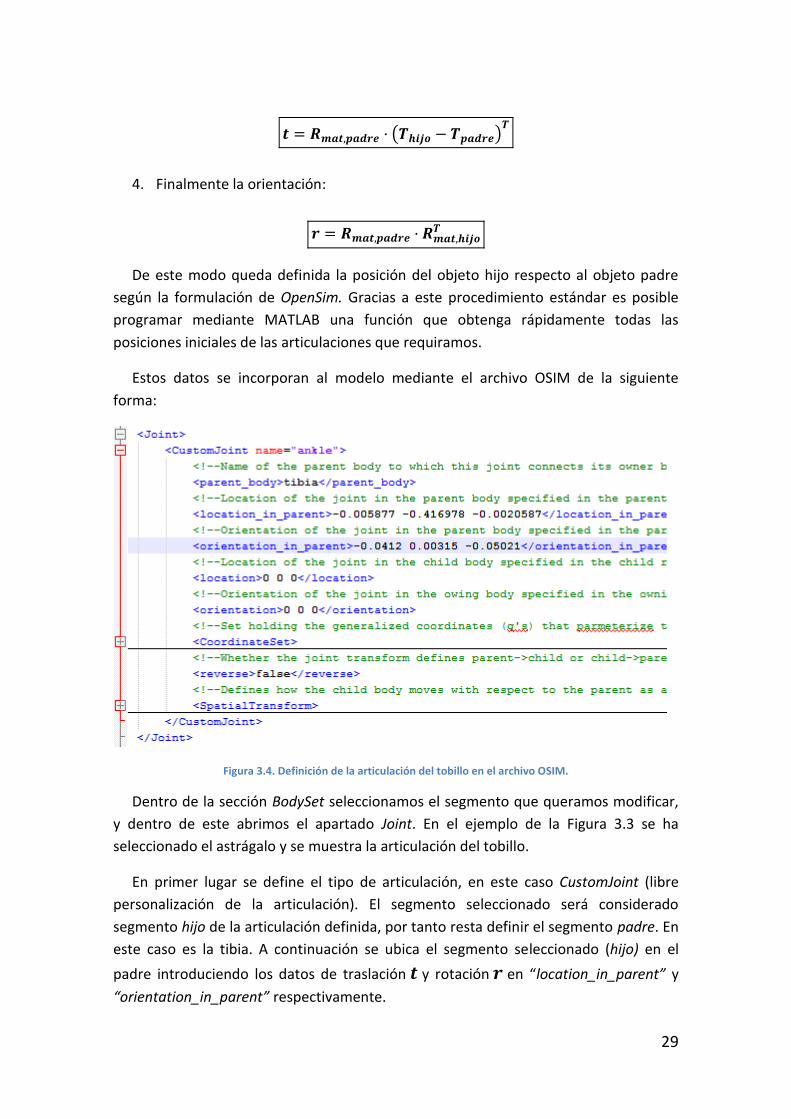
Estos datos se incorporan al modelo mediante el archivo OSIM de la siguiente
forma:
Figura 3.4. Definición de la articulación del tobillo en el archivo OSIM.
Dentro de la sección BodySet seleccionamos el segmento que queramos modificar,
y dentro de este abrimos el apartado Joint. En el ejemplo de la Figura 3.3 se ha
seleccionado el astrágalo y se muestra la articulación del tobillo.
En primer lugar se define el tipo de articulación, en este caso CustomJoint (libre
personalización de la articulación). El segmento seleccionado será considerado
segmento hijo de la articulación definida, por tanto resta definir el segmento padre. En
este caso es la tibia. A continuación se ubica el segmento seleccionado (hijo) en el
padre introduciendo los datos de traslación y rotación en “location_in_parent” y
“orientation_in_parent” respectivamente.
30
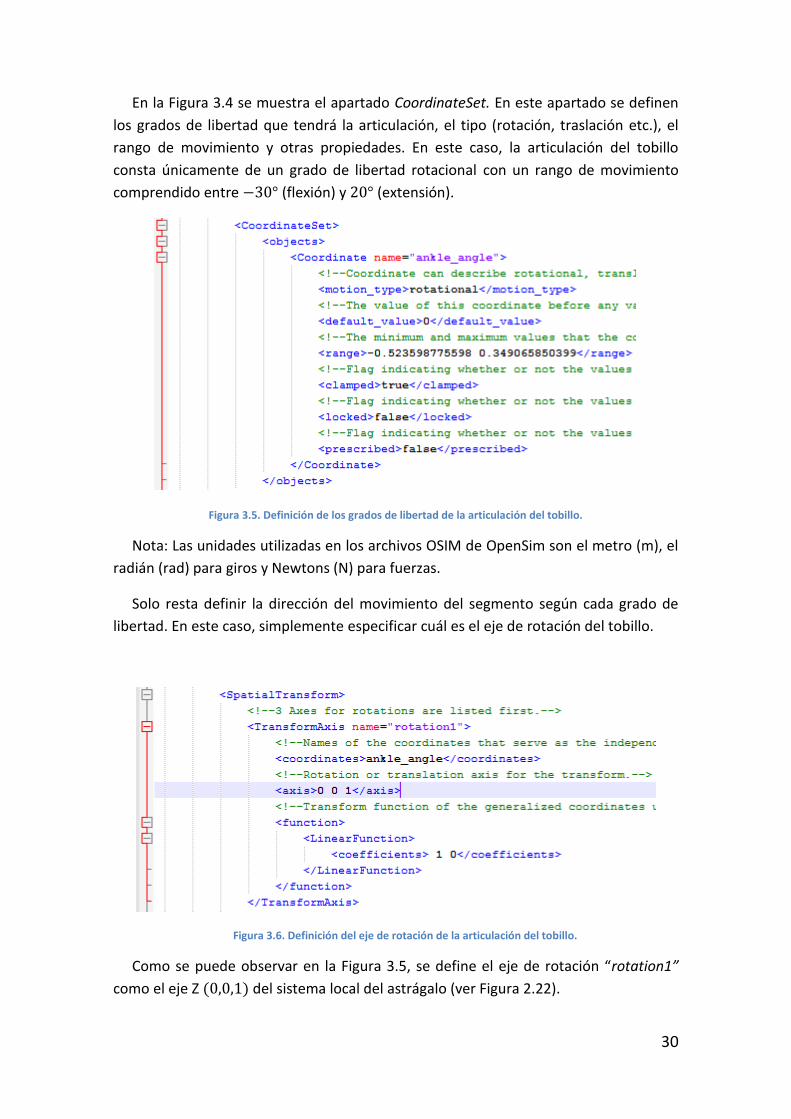
En la Figura 3.4 se muestra el apartado CoordinateSet. En este apartado se definen
los grados de libertad que tendrá la articulación, el tipo (rotación, traslación etc.), el
rango de movimiento y otras propiedades. En este caso, la articulación del tobillo
consta únicamente de un grado de libertad rotacional con un rango de movimiento
comprendido entre (flexión) y (extensión).
Figura 3.5. Definición de los grados de libertad de la articulación del tobillo.
Nota: Las unidades utilizadas en los archivos OSIM de OpenSim son el metro (m), el
radián (rad) para giros y Newtons (N) para fuerzas.
Solo resta definir la dirección del movimiento del segmento según cada grado de
libertad. En este caso, simplemente especificar cuál es el eje de rotación del tobillo.
Figura 3.6. Definición del eje de rotación de la articulación del tobillo.
Como se puede observar en la Figura 3.5, se define el eje de rotación “rotation1”
como el eje Z del sistema local del astrágalo (ver Figura 2.22).
31
A continuación se detalla la ubicación y características de cada articulación:
3.2.1 Movimiento del cuerpo
Articulación ficticia definida en la pelvis respecto a la referencia global para poder
mover el modelo fácilmente. No representa ningún movimiento real del cuerpo
humano.
- Tipo: CustomJoint
- Hijo: Pelvis
- Padre: Referencia (ground)
- Ubicación: Sistema local de la pelvis (ver Figura 2.19).
- Grados de libertad: 6 (3 rotaciones y 3 traslaciones)
- Rango de movimiento ilimitado.
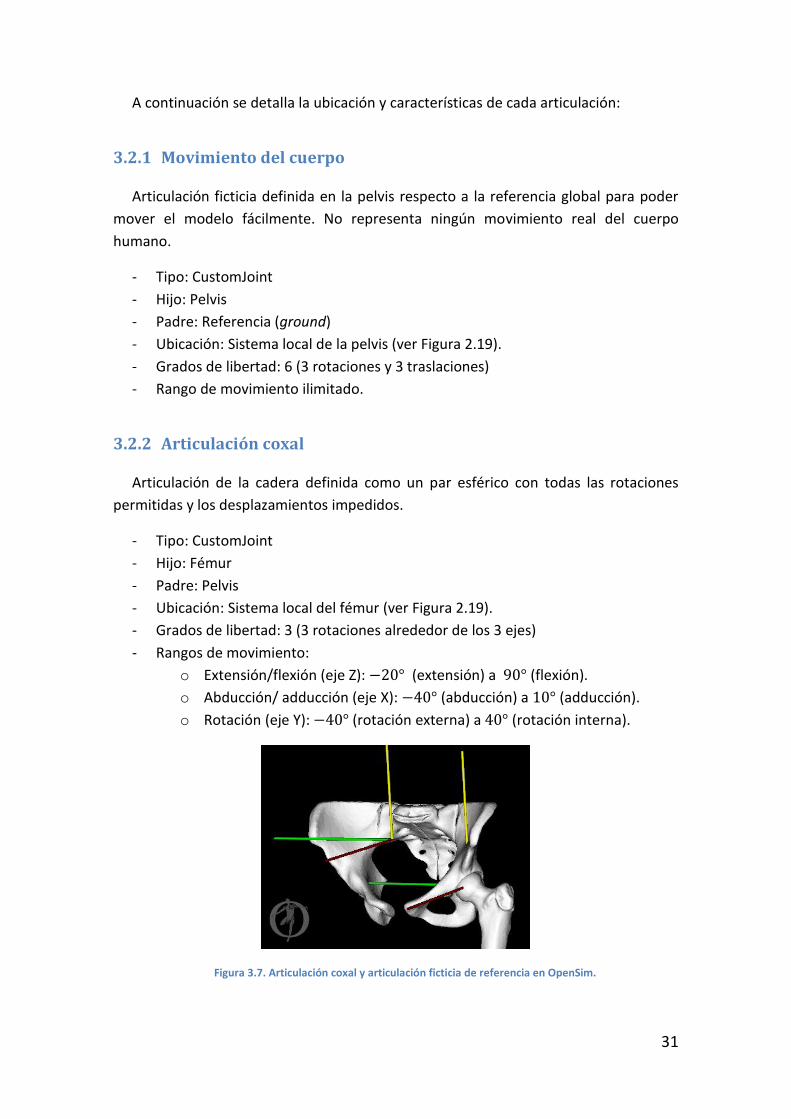
3.2.2 Articulación coxal
Articulación de la cadera definida como un par esférico con todas las rotaciones
permitidas y los desplazamientos impedidos.
- Tipo: CustomJoint
- Hijo: Fémur
- Padre: Pelvis
- Ubicación: Sistema local del fémur (ver Figura 2.19).
- Grados de libertad: 3 (3 rotaciones alrededor de los 3 ejes)
- Rangos de movimiento:
o Extensión/flexión (eje Z): (extensión) a (flexión).
o Abducción/ adducción (eje X): (abducción) a (adducción).
o Rotación (eje Y): (rotación externa) a (rotación interna).
Figura 3.7. Articulación coxal y articulación ficticia de referencia en OpenSim.
32
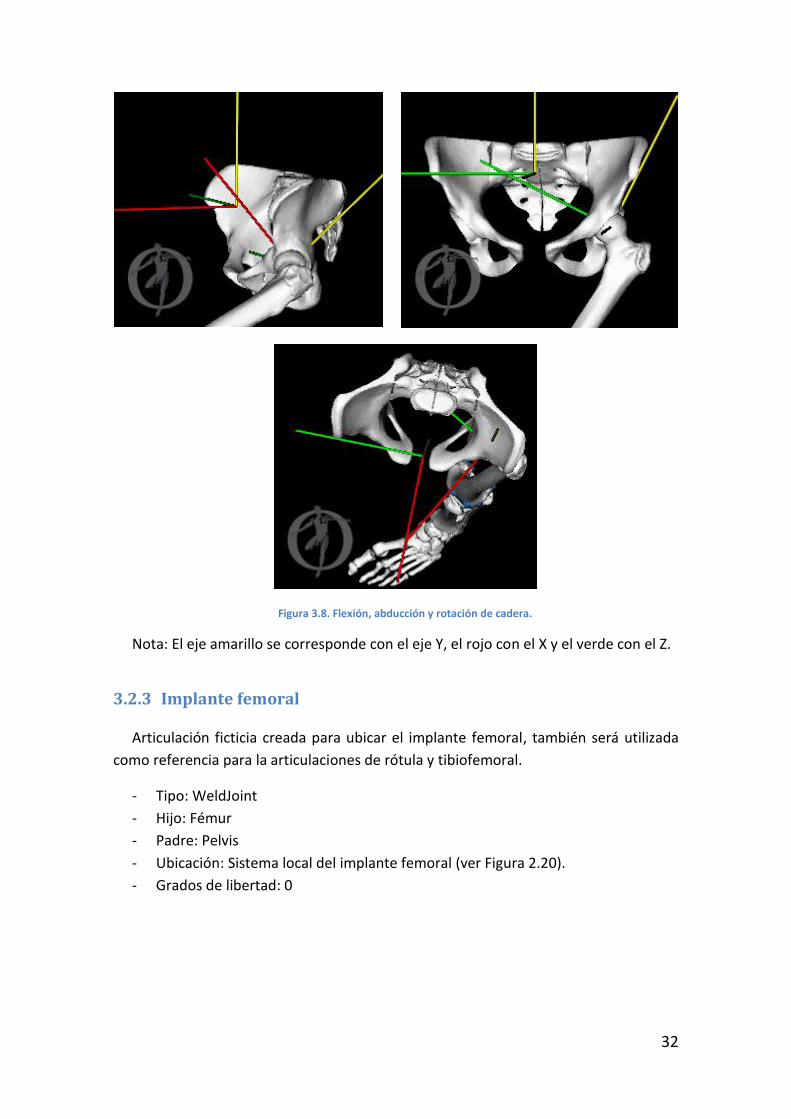
Figura 3.8. Flexión, abducción y rotación de cadera.
Nota: El eje amarillo se corresponde con el eje Y, el rojo con el X y el verde con el Z.
3.2.3 Implante femoral
Articulación ficticia creada para ubicar el implante femoral, también será utilizada
como referencia para la articulaciones de rótula y tibiofemoral.
- Tipo: WeldJoint
- Hijo: Fémur
- Padre: Pelvis
- Ubicación: Sistema local del implante femoral (ver Figura 2.20).
- Grados de libertad: 0

33
Figura 3.9. Implante femoral ubicado respecto al fémur en OpenSim.
3.2.4 Rótula y articulación tibiofemoral
Estas articulaciones tienen un comportamiento complejo que se simplificará
asumiendo que la flexión como único grado de libertad de la articulación tibiofemoral,
siendo el resto de movimientos dependientes de la flexión.
Para imponer esta relación cinemática se hará uso de las restricciones (constraints)
que podemos imponer en OpenSim mediante funciones polinomiales. Estas
restricciones vendrán dadas por los datos disponibles de fluoroscopia, gracias a los
cuales podemos obtener las funciones que relacionan cada una de las traslaciones y
rotaciones de la rótula y de la articulación tibiofemoral en función de la
extensión/flexión de la rodilla.
34
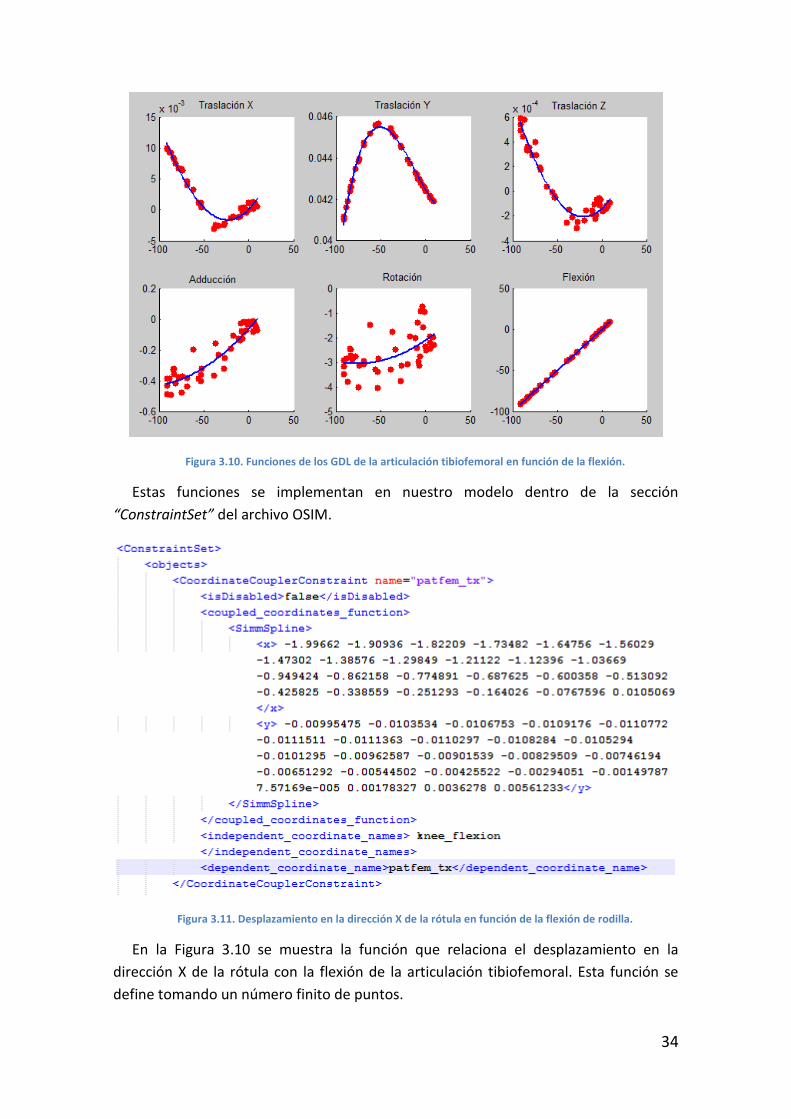
Figura 3.10. Funciones de los GDL de la articulación tibiofemoral en función de la flexión.
Estas funciones se implementan en nuestro modelo dentro de la sección
“ConstraintSet” del archivo OSIM.
Figura 3.11. Desplazamiento en la dirección X de la rótula en función de la flexión de rodilla.
En la Figura 3.10 se muestra la función que relaciona el desplazamiento en la
dirección X de la rótula con la flexión de la articulación tibiofemoral. Esta función se
define tomando un número finito de puntos.
35
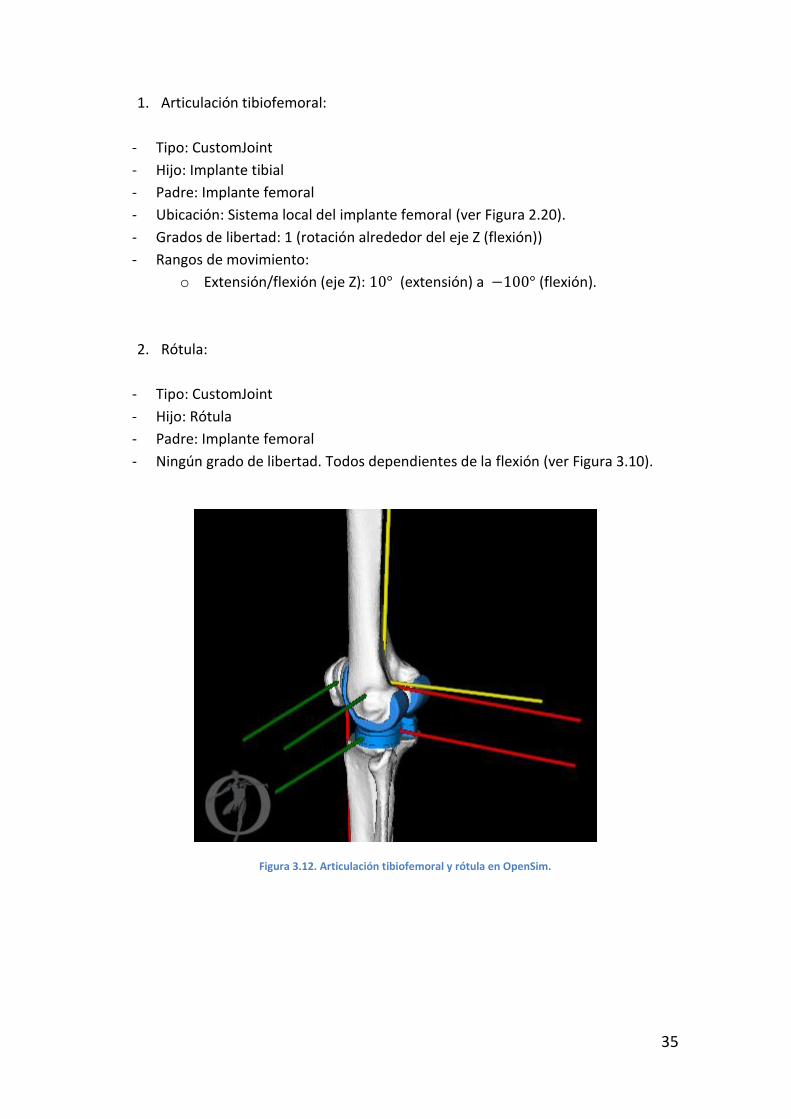
1. Articulación tibiofemoral:
- Tipo: CustomJoint
- Hijo: Implante tibial
- Padre: Implante femoral
- Ubicación: Sistema local del implante femoral (ver Figura 2.20).
- Grados de libertad: 1 (rotación alrededor del eje Z (flexión))
- Rangos de movimiento:
o Extensión/flexión (eje Z): (extensión) a (flexión).
2. Rótula:
- Tipo: CustomJoint
- Hijo: Rótula
- Padre: Implante femoral
- Ningún grado de libertad. Todos dependientes de la flexión (ver Figura 3.10).
Figura 3.12. Articulación tibiofemoral y rótula en OpenSim.
36
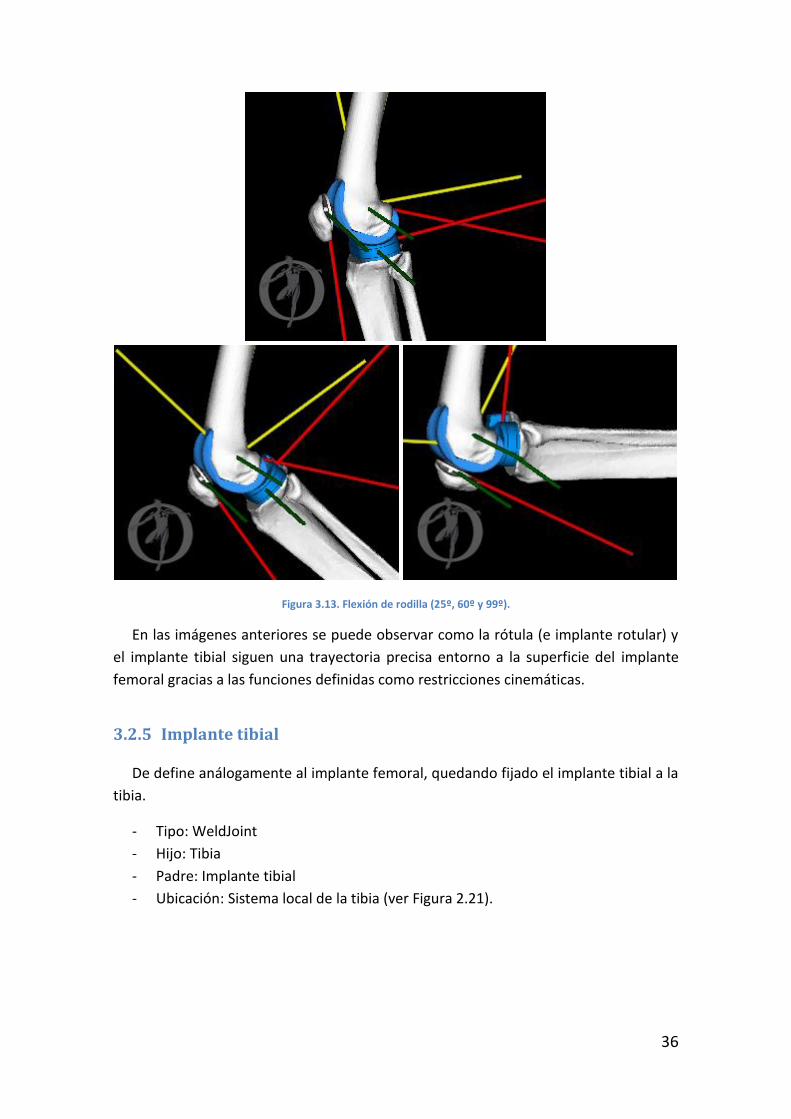
Figura 3.13. Flexión de rodilla (25º, 60º y 99º).
En las imágenes anteriores se puede observar como la rótula (e implante rotular) y
el implante tibial siguen una trayectoria precisa entorno a la superficie del implante
femoral gracias a las funciones definidas como restricciones cinemáticas.
3.2.5 Implante tibial
De define análogamente al implante femoral, quedando fijado el implante tibial a la
tibia.
- Tipo: WeldJoint
- Hijo: Tibia
- Padre: Implante tibial
- Ubicación: Sistema local de la tibia (ver Figura 2.21).

37
Figura 3.14. Ubicación del implante tibial en OpenSim.
3.2.6 Tobillo
La articulación que relaciona el astrágalo con tibia y peroné y que simplificaremos
como una rotación alrededor del eje Z del astrágalo que fue definido como el eje del
cilindro creado a partir de la superficie superior del astrágalo (ver Figura 2.22).
- Tipo: CustomJoint
- Hijo: Astrágalo
- Padre: Tibia
- Ubicación: Sistema local del astrágalo (ver Figura 2.22).
- Grados de libertad: 1 (rotación alrededor del eje Z (flexión))
- Rangos de movimiento:
o Extensión/flexión (eje Z): (extensión) a (flexión).
Los objetos quedan posicionados por defecto tal y cómo se muestran en la Figura
2.17 del capítulo anterior, a excepción del pie. Esto es debido a que las tomografías se
realizaron con el sujeto tumbado, sin embargo la pose inicial deseada para el modelo
es erguida. Con lo cual, se rota en Geomagic el tobillo (eje Z del astrágalo) unos 27
grados aproximadamente para conseguir una posición inicial erguida del modelo.
38
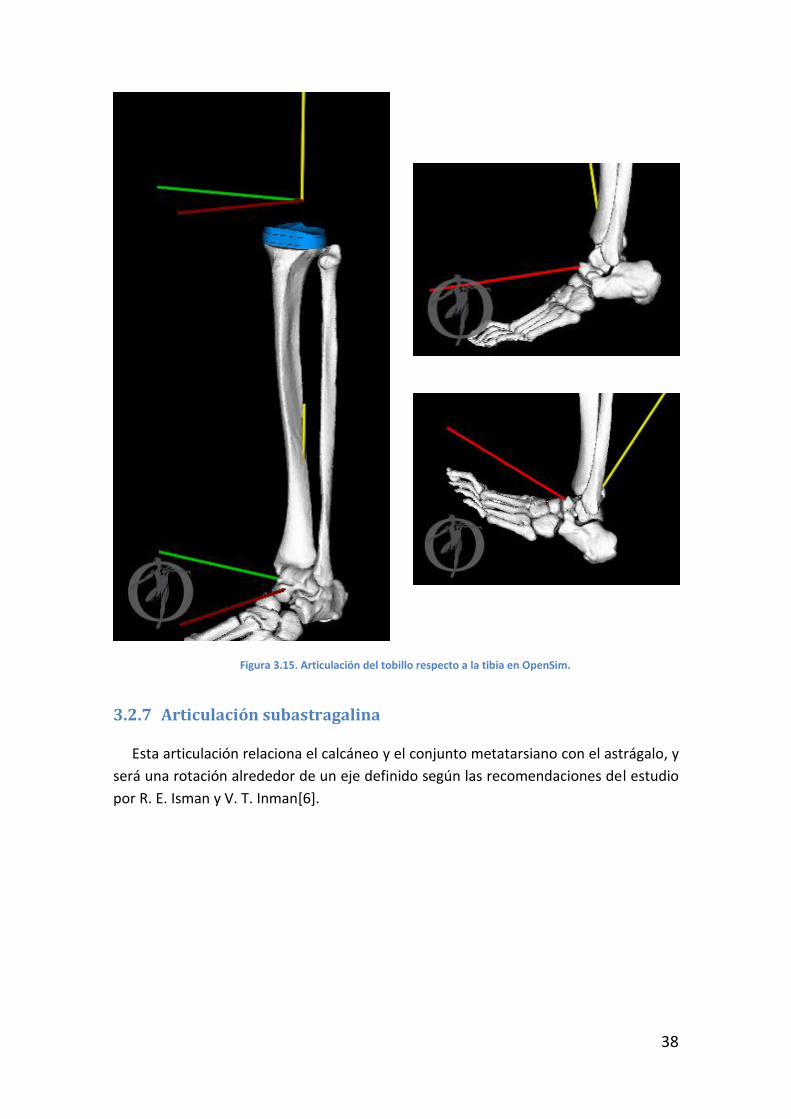
Figura 3.15. Articulación del tobillo respecto a la tibia en OpenSim.
3.2.7 Articulación subastragalina
Esta articulación relaciona el calcáneo y el conjunto metatarsiano con el astrágalo, y
será una rotación alrededor de un eje definido según las recomendaciones del estudio
por R. E. Isman y V. T. Inman[6].
39
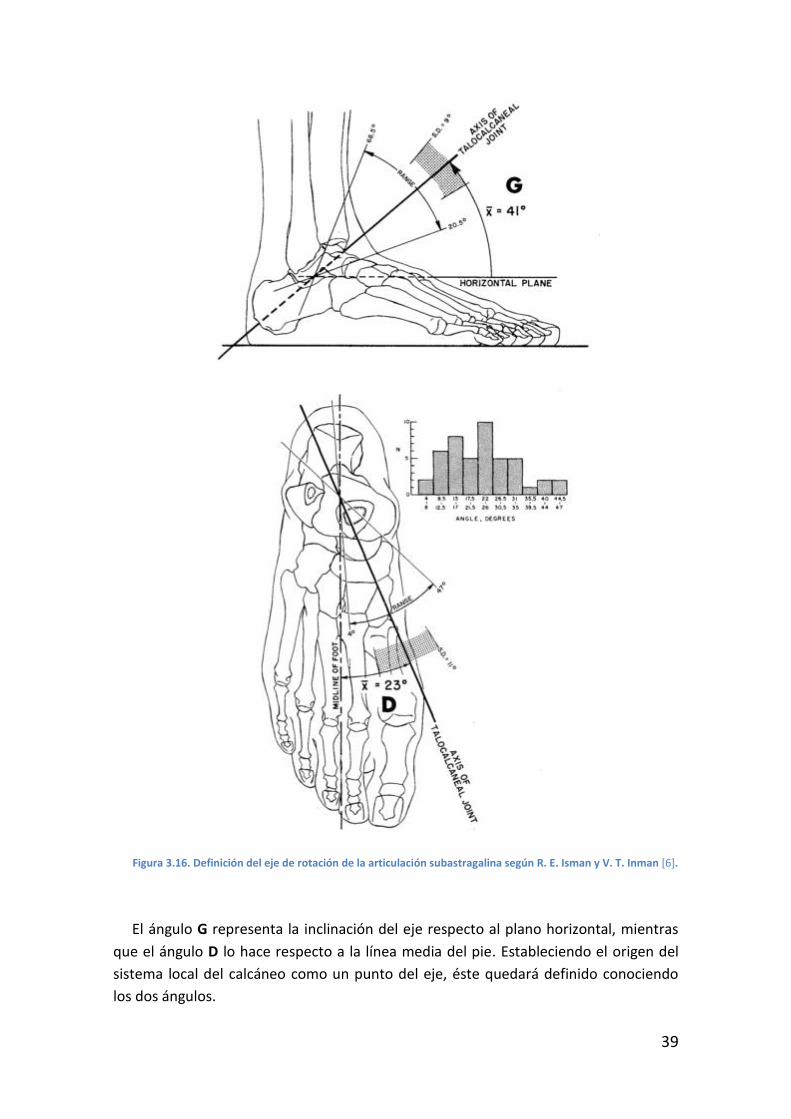
Figura 3.16. Definición del eje de rotación de la articulación subastragalina según R. E. Isman y V. T. Inman [6].
El ángulo G representa la inclinación del eje respecto al plano horizontal, mientras
que el ángulo D lo hace respecto a la línea media del pie. Estableciendo el origen del
sistema local del calcáneo como un punto del eje, éste quedará definido conociendo
los dos ángulos.
40
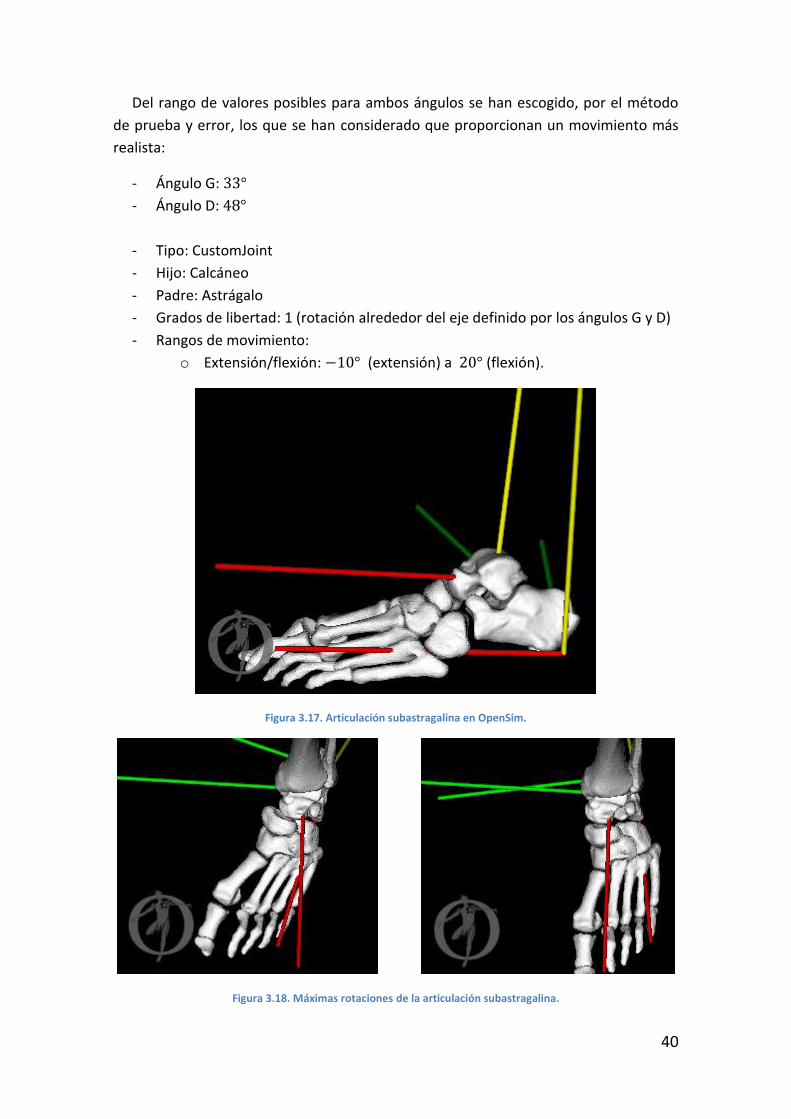
Del rango de valores posibles para ambos ángulos se han escogido, por el método
de prueba y error, los que se han considerado que proporcionan un movimiento más
realista:
- Ángulo G:
- Ángulo D:
- Tipo: CustomJoint
- Hijo: Calcáneo
- Padre: Astrágalo
- Grados de libertad: 1 (rotación alrededor del eje definido por los ángulos G y D)
- Rangos de movimiento:
o Extensión/flexión: (extensión) a (flexión).
Figura 3.17. Articulación subastragalina en OpenSim.
Figura 3.18. Máximas rotaciones de la articulación subastragalina.

41
3.2.8 Articulación de las falanges
Se aproxima asumiendo que todas las falanges del pie componen un único sólido
rígido que se articula respecto al conjunto calcáneo-metatarsial. De igual manera, se
han seguido las recomendaciones del mismo autor que el caso anterior.
Figura 3.19. Definición del eje de rotación de la articulación de las falanges según R. E. Isman y V. T. Inman.
En este caso, el ángulo H representa el ángulo que forma la línea que une las
cabezas del segundo y quinto metatarsiano respecto a la línea media del pie, y para el
cual se ha tomado un valor de .
- Tipo: CustomJoint
- Hijo: Falanges
- Padre: Calcáneo
- Grados de libertad: 1 (rotación alrededor del eje definido por el ángulo H)
- Rangos de movimiento:
o Extensión/flexión: (extensión) a (flexión).

42
Figura 3.20. Articulación de las falanges respecto al calcáneo en OpenSim.
Figura 3.21. Máxima flexión/extensión de la articulación de las falanges.
Quedan definidas todas las articulaciones de la pierna, y por tanto, el modelo
cinemático. Sólo resta definir el modelo dinámico.
43
4 Modelo dinámico
En este último capítulo se modela la musculatura de la pierna, su geometría,
parámetros característicos y puntos de inserción. Además, se definen los parámetros
inerciales de los cuerpos óseos que componen la pierna. Los modelos musculares
empleados para simulaciones biomecánicas son básicamente algoritmos que
transforman la activación muscular en fuerza muscular [7].
4.1 Modelo muscular
El modelo empleado por OpenSim para representar la musculatura se describe a
continuación:
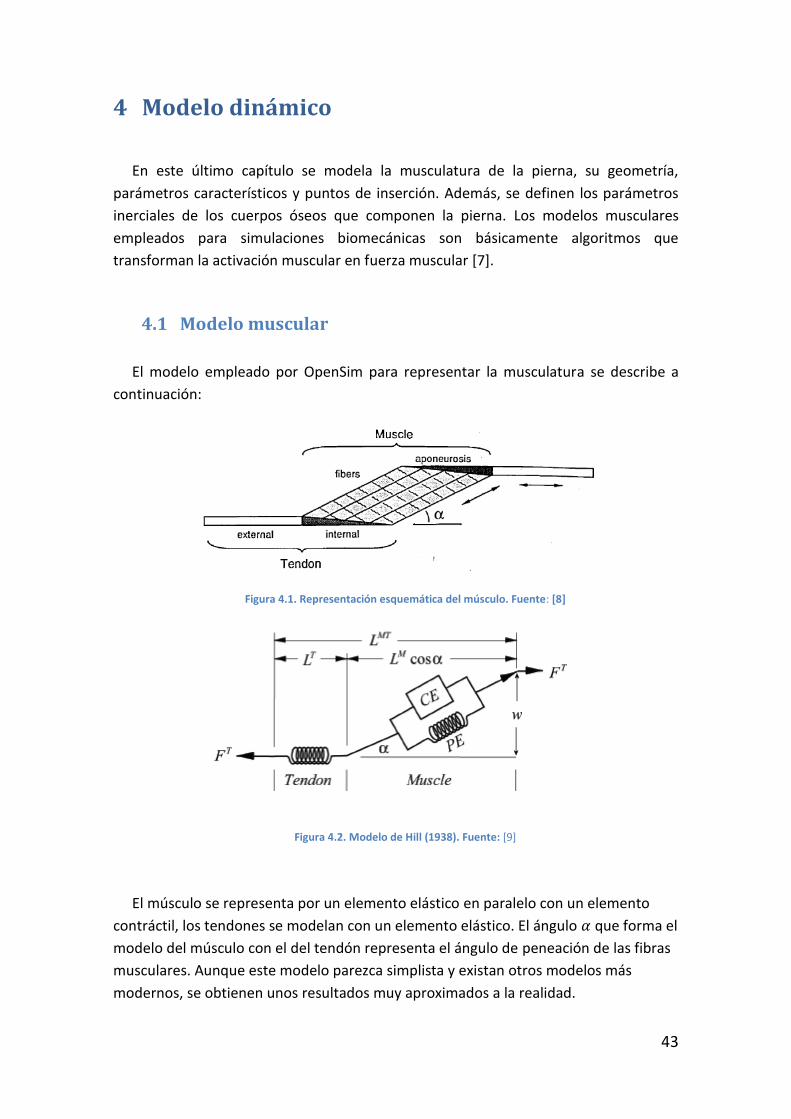
Figura 4.1. Representación esquemática del músculo. Fuente: [8]
Figura 4.2. Modelo de Hill (1938). Fuente: [9]
El músculo se representa por un elemento elástico en paralelo con un elemento
contráctil, los tendones se modelan con un elemento elástico. El ángulo que forma el
modelo del músculo con el del tendón representa el ángulo de peneación de las fibras
musculares. Aunque este modelo parezca simplista y existan otros modelos más
modernos, se obtienen unos resultados muy aproximados a la realidad.
44
OpenSim ofrece la posibilidad de escoger entre distintos modelos a la hora de
definir las características musculares. En este caso, se ha optado por el modelo “Thelen
2003” [7].
Este modelo es una ligera modificación del modelo de Hill. Para un instante de
tiempo, las entradas del sistema son la activación y la longitud de las fibras musculares.
El sistema devuelve la fuerza generada en ese instante de tiempo. Debido a que
existen más unidades musculares (actuadores) que momentos generalizados en las
articulaciones, y por tanto infinitas soluciones posibles, OpenSim realiza un proceso de
optimización para hallar la solución del problema dinámico.
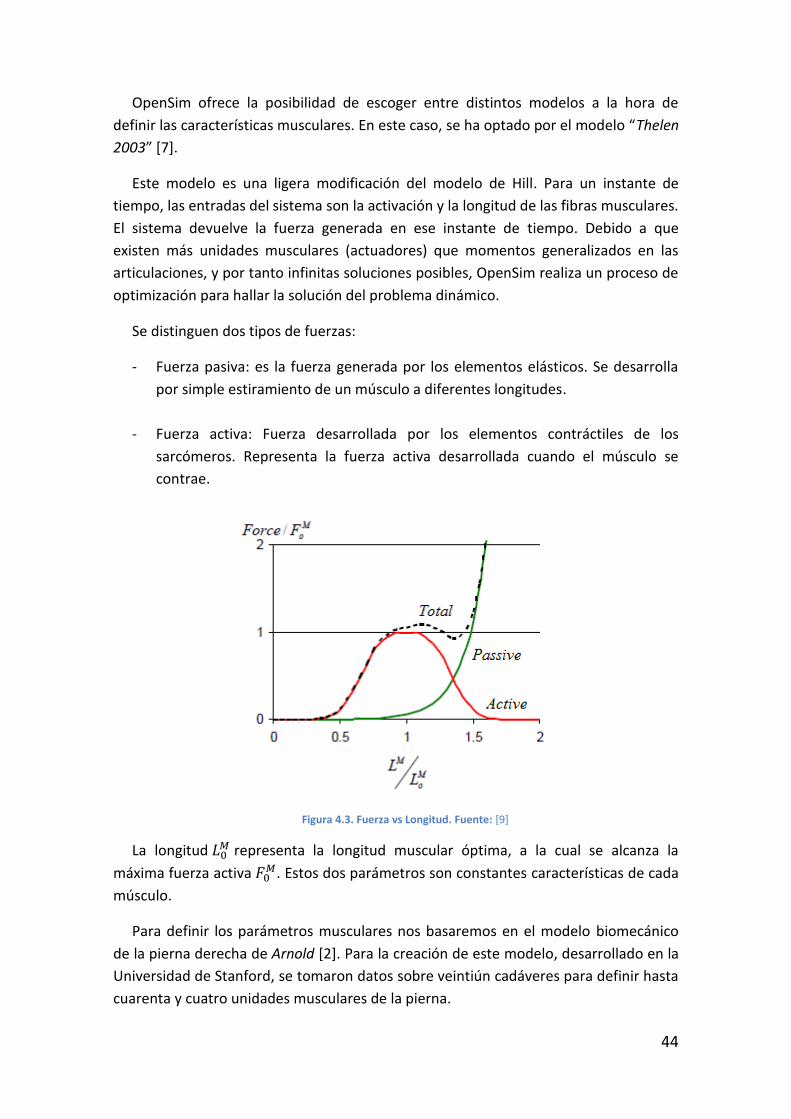
Se distinguen dos tipos de fuerzas:
- Fuerza pasiva: es la fuerza generada por los elementos elásticos. Se desarrolla
por simple estiramiento de un músculo a diferentes longitudes.
- Fuerza activa: Fuerza desarrollada por los elementos contráctiles de los
sarcómeros. Representa la fuerza activa desarrollada cuando el músculo se
contrae.
Figura 4.3. Fuerza vs Longitud. Fuente: [9]
La longitud representa la longitud muscular óptima, a la cual se alcanza la
máxima fuerza activa . Estos dos parámetros son constantes características de cada
músculo.
Para definir los parámetros musculares nos basaremos en el modelo biomecánico
de la pierna derecha de Arnold [2]. Para la creación de este modelo, desarrollado en la
Universidad de Stanford, se tomaron datos sobre veintiún cadáveres para definir hasta
cuarenta y cuatro unidades musculares de la pierna.

45
Figura 4.4. Modelo OpenSim de Arnold.
Como se puede observar en la figura, los músculos son modelados como cuerdas
elásticas con las propiedades del modelo “Thelen 2003”.
4.2 Parámetros musculares
Obtendremos nuestros parámetros escalando los parámetros del modelo de Arnold
de acuerdo con la diferencia de tamaño entre ambos modelos. Para ello, al ser el
modelo de Arnold un modelo de pierna derecha y el nuestro de pierna izquierda,
debemos aplicar simetría al modelo de Arnold para obtener un modelo de pierna
izquierda a partir del cual poder comparar y escalar nuestro modelo. Este modelo lo
llamaremos modelo Espejo.
Esta modificación la podemos realizar hueso por hueso gracias a Geomagic. Una vez
obtenido el modelo simétrico podemos proceder a obtener los factores de escala en
las tres direcciones X, Y, Z.

46
Este escalado nos permite tener una primera aproximación de los parámetros
musculares de nuestro modelo. Los parámetros geométricos serán modificados
posteriormente de forma manual para que sean congruentes.
Los sistemas de referencia locales definidos en el modelo de Arnold y en el aquí
presentado son diferentes. Por tanto, será necesario aplicar una traslación y una
rotación al modelo de Arnold para poder realizar la comparación y el escalado.
Figura 4.5. Modelo espejo (izquierda) y modelo de Arnold (derecha) tras traslado, rotación y escalado (superpuesto a nuestro modelo (gris)).
Obtenemos pues nueve parámetros, tres para cada una de las operaciones, que
nos permitirán obtener una buena aproximación para nuestro modelo.
- Traslación:
- Rotación:
- Escalado:
En primer lugar, se obtienen los parámetros necesarios para definir la geometría de los
músculos, estos son:
- Puntos de inserción en los huesos.
- Superficies envolventes (‘wrapping surfaces’) para representar la forma de los
músculos y definir el ángulo de inserción en los huesos.

47
4.2.1 Puntos de inserción
Los puntos de inserción están definidos respecto a los correspondientes sistemas de
referencia locales del hueso al que pertenecen. Para especificar los puntos de inserción
de nuestro modelo a partir de los del modelo de Arnold, seguimos los siguientes pasos:
1. Puntos de inserción del modelo Espejo. Se obtienen los puntos de inserción
simétricos respecto al plano medial (plano XY) con una simple operación:
[
]
2. Se aplican los parámetros obtenidos por comparación manual en Geomagic
(traslación, rotación y escalado). Se emplea un escalado lineal, por tanto las
ecuaciones usadas para obtener las nuevas coordenadas de los puntos son:
Siendo la matriz de rotación a partir de los ángulos de rotación obtenidos
anteriormente.
Los puntos de inserción de cada músculo se especifican en el archivo OSIM de
nuestro modelo dentro de la sección ForceSet. En la Figura 4.6 se aprecia cómo
se definen estos puntos en el sistema de referencia local del segmento al que
pertenecen.
Figura 4.6. Definición de los puntos de inserción del músculo aductor corto.

48
3. Una vez aproximados los puntos mediante el escalado se procede a ubicar de
forma precisa los puntos manualmente en la interfaz visual de OpenSim.
Figura 4.7. Comparación puntos de inserción entre modelo de Arnold (izquierda) y nuestro modelo (derecha).
4.2.2 Superficies envolventes
En cuanto a las superficies envolventes, se trata de superficies elípticas o cilíndricas
referenciadas respecto al sistema local del hueso al que se asocian. Por otro lado,
estarán asociadas a los músculos que las requieran para modificar su forma.
Para definir completamente la superficie es necesario especificar sus dimensiones y
la traslación y rotación respecto al sistema de referencia.
Al igual que en el caso de los puntos de inserción, se obtienen estos parámetros a
partir del escalado lineal del modelo de Arnold. En este caso las operaciones necesarias
son las siguientes:
- Modelo espejo: [
] [
]
- Ubicación:
- Dimensión:
49
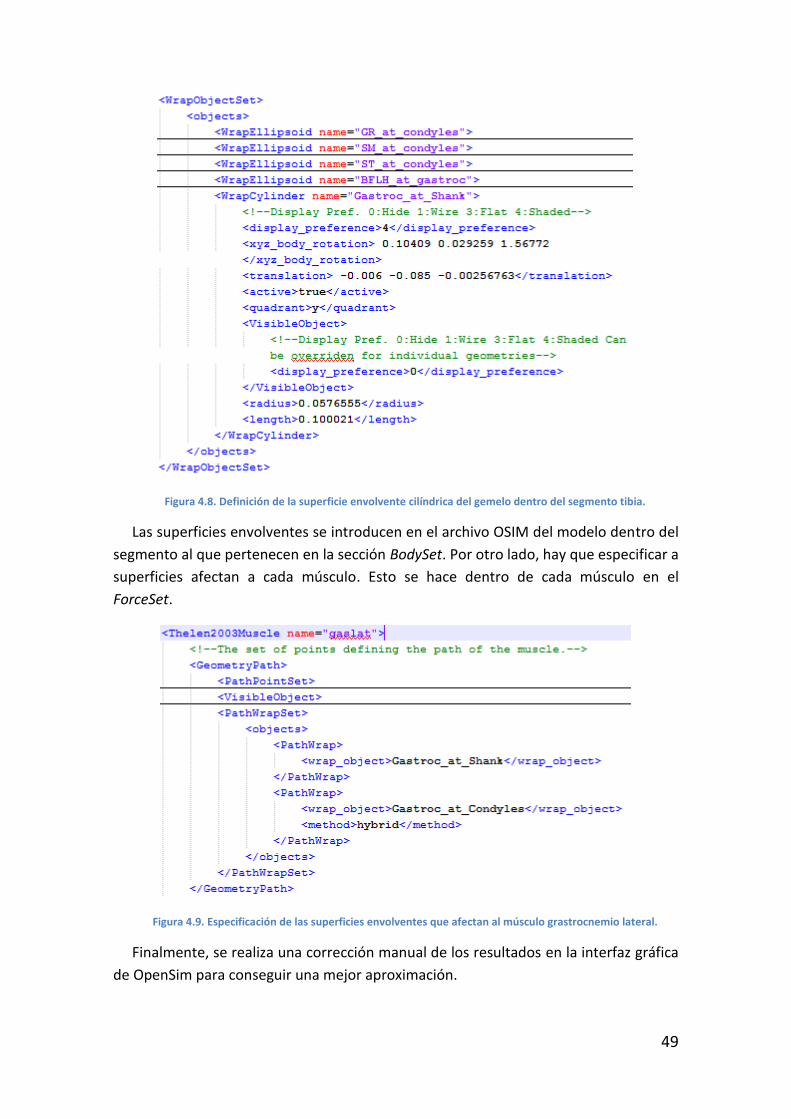
Figura 4.8. Definición de la superficie envolvente cilíndrica del gemelo dentro del segmento tibia.
Las superficies envolventes se introducen en el archivo OSIM del modelo dentro del
segmento al que pertenecen en la sección BodySet. Por otro lado, hay que especificar a
superficies afectan a cada músculo. Esto se hace dentro de cada músculo en el
ForceSet.
Figura 4.9. Especificación de las superficies envolventes que afectan al músculo grastrocnemio lateral.
Finalmente, se realiza una corrección manual de los resultados en la interfaz gráfica
de OpenSim para conseguir una mejor aproximación.

50
Figura 4.10. Comparación superficie envolvente del gemelo entre modelo de Arnold (izquierda) y nuestro modelo (derecha).
Figura 4.11. Modelo antes (izquierda) y después (derecha) de aplicar superficies envolventes.
Para realizar estas modificaciones, tanto de los puntos de inserción como de las
superficies envolventes, se utiliza un código en MATLAB desarrollado por Romain
Laberre que, a partir de los datos de traslación, rotación y escalado modifica las
cuarenta y cuatro unidades musculares de las que se compone el modelo de Arnold
para adaptarlas a nuestro modelo.

51
Figura 4.12. Listado de músculos del modelo de Arnold. Fuente: [2]

52
4.3 Parámetros dinámicos musculares
La geometría de los modelos musculares queda totalmente definida en este punto,
el siguiente paso es establecer las propiedades dinámicas musculares. En este caso, a
falta de datos experimentales del sujeto de estudio, emplearemos los mismos valores
dinámicos utilizados en el modelo de Arnold (ver Figura 4.12). Los valores a definir para
cada músculo son los siguientes:
- Longitud óptima de las fibra, . Longitud de las fibras para generar la fuerza
isométrica máxima (ver figura 4.3).
- Fuerza isométrica máxima, . Fuerza máxima que las fibras pueden generar.
- Longitud del tendón relajado, . Longitud del tendón por debajo de la cual el
tendón (y por tanto el conjunto muscular) produce fuerza nula.
- Ángulo de peneación del músculo (ver figura 4.2) para la longitud óptima de las
fibras, .
Figura 4.13. Parámetros del músculo glúteo mayor superior.

53
4.4 Parámetros inerciales
La masa y momentos de inercia de los distintos cuerpos óseos se extraen a partir
del estudio experimental realizado por Klein Horsman et al. [10]. El peso de nuestro
sujeto es de , mientras que el del sujeto estudiado por Klein Horsman et al. es de
. Por tanto, escalamos los parámetros para adaptarlos a nuestro modelo.
Por otro lado, el centro de masas puede ser calculado computacionalmente
mediante Geomagic, obteniendo datos más precisos que los proporcionados por el
estudio anterior.
A efectos inerciales, solo se consideran relevantes los huesos de mayor tamaño, es
decir, pelvis, fémur, tibia y peroné, y pie.
Klein Horsman et al. solo proporciona los momentos de inercia alerededor del eje
transversal (eje X) y del longitudinal (eje Y), por tanto asumiremos que el momento de
inercia alrededor del otro eje transversal (eje Z) es igual al primero.
Figura 4.14. Centro de gravedad de la pelvis calculado en Geomagic.
Pelvis
Fémur
Tibia y peroné
Pie
Estos datos se introducen en el fichero OSIM de la siguiente forma:

54
Figura 4.15. Definición de los parámetros inerciales de la pelvis en el fichero OSIM.
55
5 Conclusión
Tal y cómo se introdujo al comienzo del documento, este proyecto tiene el único
propósito de servir como guía práctica para la creación de modelos biomecánicos de
cualquier miembro del cuerpo humano para el software OpenSim. Se han tomado
datos de una pierna izquierda con implante de rodilla para disponer de un ejemplo
relativamente complejo y poder exponer un buen número de características que se
pueden modelar en OpenSim. Este proyecto no tenía el objeto de obtener resultados
especialmente precisos, sino de proponer una metodología de diseño.
Se ha tratado de seguir una línea coherente durante el desarrollo del mismo para
facilitar su comprensión. Muchos de los procedimientos aquí empleados no son únicos
ni, por supuesto, óptimos. De igual modo, el software utilizado para segmentación,
ScanIP, y para procesado 3D, Geomagic, no son los únicos disponibles en el mercado.
Queda a la elección del diseñador emplear los procedimientos y herramientas aquí
expuestas.
En la misma línea de trabajo de este proyecto se podrían desarrollar herramientas y
programas, ya sea en MATLAB o en cualquier otro lenguaje de programación, para
agilizar y estandarizar el proceso de diseño de un modelo biomecánico para OpenSim a
partir de imágenes de TAC.
56
6 Referencias
[1] S. L. Delp, F. C. Anderson, A. S. Arnold, P. Loan, A. Habib, C. T. John, E. Guendelman, and D. G. Thelen, “OpenSim: open-source software to create and analyze dynamic simulations of movement.,” IEEE Trans. Biomed. Eng., vol. 54, no. 11, pp. 1940–50, Nov. 2007.
[2] E. M. Arnold, S. R. Ward, R. L. Lieber, and S. L. Delp, “A model of the lower limb for analysis of human movement.,” Ann. Biomed. Eng., vol. 38, no. 2, pp. 269–79, Feb. 2010.
[3] B. J. Fregly and T. Besier, “Grand Challenge Competition to Predict In Vivo Knee Loads.”
[4] R. Leberre, “JW OpenSim Model Description,” Seville, 2013.
[5] V. Santschi and G. Paradis, “Letter to the editor.,” Public Health Rep., vol. 128, no. 5, pp. 352–3, Sep. 2013.
[6] R. E. Isman and V. T. Inman, “Anthropometric Studies of the Human Foot and Ankle.”
[7] C. T. John, “Complete Description of the Thelen2003Muscle Model,” 2003.
[8] “Zajac - 1989 - Muscle and tendon properties, models, scaling, and application to biomechanics and motor control.pdf.” .
[9] C. Anderson, “Equations for Modeling the Forces Generated by Muscles and Tendons,” pp. 1–13, 2007.
[10] M. D. Klein Horsman, H. F. J. M. Koopman, F. C. T. van der Helm, L. P. Prosé, and H. E. J. Veeger, “Morphological muscle and joint parameters for musculoskeletal modelling of the lower extremity.,” Clin. Biomech. (Bristol, Avon), vol. 22, no. 2, pp. 239–47, Feb. 2007.
57
7 Anexo
7.1 Ángulos de Euler
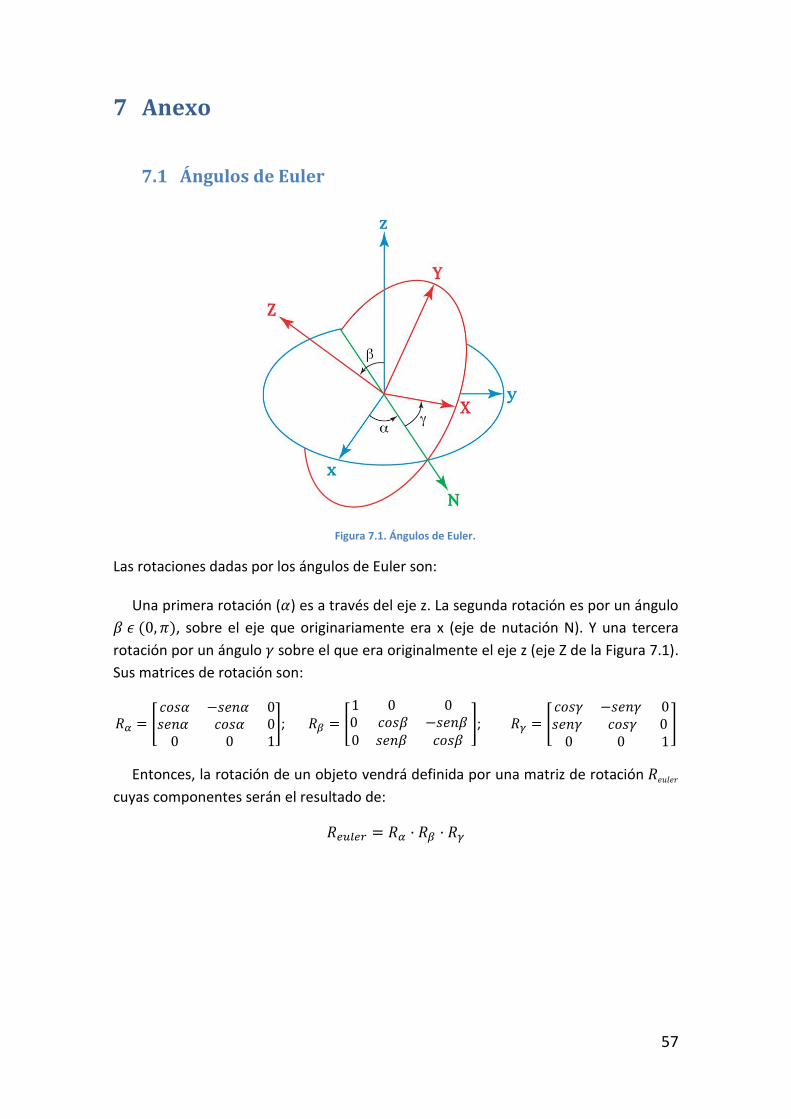
Figura 7.1. Ángulos de Euler.
Las rotaciones dadas por los ángulos de Euler son:
Una primera rotación ( ) es a través del eje z. La segunda rotación es por un ángulo
, sobre el eje que originariamente era x (eje de nutación N). Y una tercera
rotación por un ángulo sobre el que era originalmente el eje z (eje Z de la Figura 7.1).
Sus matrices de rotación son:
[
]; [
]; [
]
Entonces, la rotación de un objeto vendrá definida por una matriz de rotación
cuyas componentes serán el resultado de:
58
7.2 Archivos adjuntos
En el DVD adjunto se encuentran el fichero OSIM que contiene el modelo definitivo,
los archivos STL y los distintos ficheros MATLAB utilizados durante el desarrollo de este
proyecto. Además se adjuntan los instaladores de las herramientas utilizadas, ScanIP y
Geomagic, y las imágenes de TAC de las que partimos.
En la carpeta “Modelo OpenSim” se encuentra el archivo “Modelo_pierna_izquierda
.osim” y la carpeta “Geometry” con los ficheros STL.
En la carpeta “MATLAB” se encuentra todos los archivos MATLAB que fueron
desarrollados por Romain Leberre y que fueron de gran ayuda para agilizar el proceso.
A continuación se detallan los archivos principales:
- JW_Geometry_data.m: en este archivo se especifican las traslaciones y
rotaciones de Euler de los distintos sistemas locales de los segmentos respecto
del sistema global. Con el objeto de obtener las relaciones “parent-child” que
definen la ubicación de los sólidos y las articulaciones (ver apartado 3.2).
- changePathPointSet.m: archivo incluido dentro de la carpeta “Modelo_Espejo”
que genera el modelo espejo del modelo de Arnold para poder escarlarlo
posteriormente (ver apartado 4.2).
- input_data.m: archivo en el cual se definen los parámetros de traslación,
rotación y escalado para ajustar el modelo espejo del modelo de Arnold al
nuestro (ver apartado 4.2).
- Main.m: función principal que, a partir de los datos introducidos en
JW_Geometry_data.m y input_dat.m, realiza las operaciones necesarias para
obtener las relaciones “parent-child” y una aproximación de los puntos de
inserción de los músculos y las superficies envolventes.