eliana ormeño mejía. miguel vivert del pino
DESCRIPTION
Identificación y diseño del controlador para un sistema regulador de presión en una planta de refrigeración. Eliana Ormeño Mejía. Miguel Vivert del Pino. OBJETIVOS. - PowerPoint PPT PresentationTRANSCRIPT

Identificación y diseño del controlador para un
sistema regulador de presión en una planta de
refrigeración. Eliana Ormeño Mejía.Miguel Vivert del Pino

OBJETIVOS
Obtener una representación matemática de un proceso de refrigeración industrial, mediante técnicas experimentales de identificación.
Diseñar un adecuado controlador que permita manipular la temperatura en un rango deseado para el modelo obtenido e implementarlo en el sistema real.
Optimizar un proceso frigorífico industrial

Ciclo de refrigeración por compresión mecánica de vapor
Objetivos de control del proceso
Controlar la temperatura dentro de una cámara frigorífica. Para ello sabemos que:
La temperatura del refrigerante guarda relación con la presión.
La presión de vaporización esta determinada por el dispositivo de expansión.

Diseño de la Planta
Bases del diseño:
Temperatura mínima a alcanzar. Tiempo en que se desea alcanzar dicha
temperatura. Volumen interno o externo de la cámara.

Diagrama de la planta

Compresor Condensador
forzado Evaporador Filtro deshidratador Visor liquido Válvula solenoide Tubo capilar
Acumulador de succión.
Tanque recibidor de líquido
Presostato Sensores de
presión y temperatura
Cámara de enfriamiento
Componentes de la planta

Sistema Real

Circuitos eléctricos y electrónicos
Circuito de fuerza Circuito
acondicionador de señal de los sensores de temperatura
Circuito de control
Circuito de mando del sistema de refrigeración
Circuito de mando de la resistencia de carga
Protecciones generales

Circuitos eléctricos y electrónicos

Diseño de la señal de entrada
La señal debe ser amigable con la planta. Debe ser lo más corta posible. Debe considerarse el Tao dominante de la
planta. Elegir un periodo de muestreo adecuado
para no malgastar recursos del ordenador.

Obtención del Tao.

Varias pruebas al escalón.
Escalón[V]
%apertura válvula [Seg] [Seg] [Seg] [°C]
1 20% 2100 400 1900 -12.5
0.5 40% 1600 240 1500 -10
0.33 60% 1400 120 1340 -7
0.2 100% 1100 90 1055 -5.2

Señales Multiseno generadas
Prueba
[seg] [seg]
Tiempo de
cambio[seg]
# de ciclos
# de sinusoi
des
Duración de la
prueba[seg]
1 950 2000 1492 600 2 25 76800
2 950 2400 1492 1200 1 10 45600
3 1500 2400 2352 1200 1 10 45600
4 1500 2400 2352 1800 1 10 46800
5 2000 2300 3142 2700 1 6 48600

Señal Multiseno escogida
Prueba[seg] [seg]
Tiempo de
cambio[seg]
# de ciclos
# de sinusoi
des
Duración de la
prueba[seg]
5 2000 2300 3142 2700 1 6 48600

Serie de tiempo de la señal Multiseno

Adquisición de datos y tratamiento de las señales.

Adquisición de datos y tratamiento de las señales.
Respuesta de la Planta: Respuesta de la Planta filtrada:

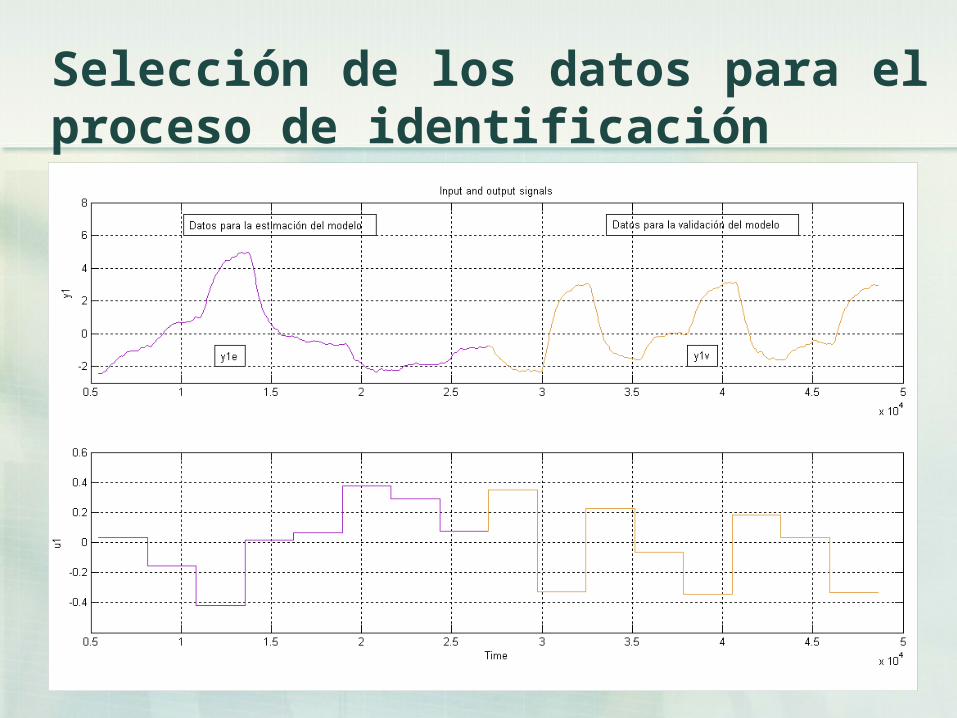
Selección de los datos para el proceso de identificación
Selección de los datos para el proceso de identificación

Selección de los datos para el proceso de identificación
La señal y1 está compuesta por 1080 muestras. Se han escogido:
540 datos para la estimación del modelo (y1e).
540 datos para la validación (y1v).

Identificación Paramétrica: Selección del modelo Luego de realizar varias pruebas con cada
uno de las estructuras paramétricas se escogieron las mejores.
Nombre del Modelo
Aprox
arx1023 76.11%
armax7652 85.48%
oe432 80.81%
bj42323 80.07%

Simulación de la armax7652 con los datos de validación.
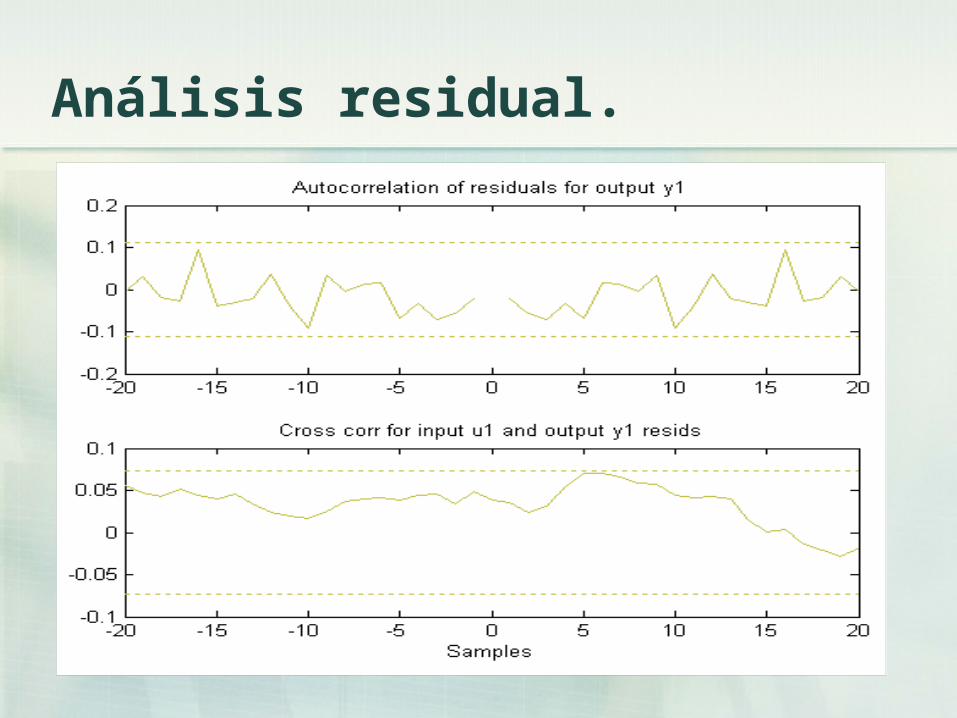
Análisis residual.

Modelo escogido
Se escogió el modelo ARMAX7652 quedando la siguiente función de transferencia en LAPLACE.
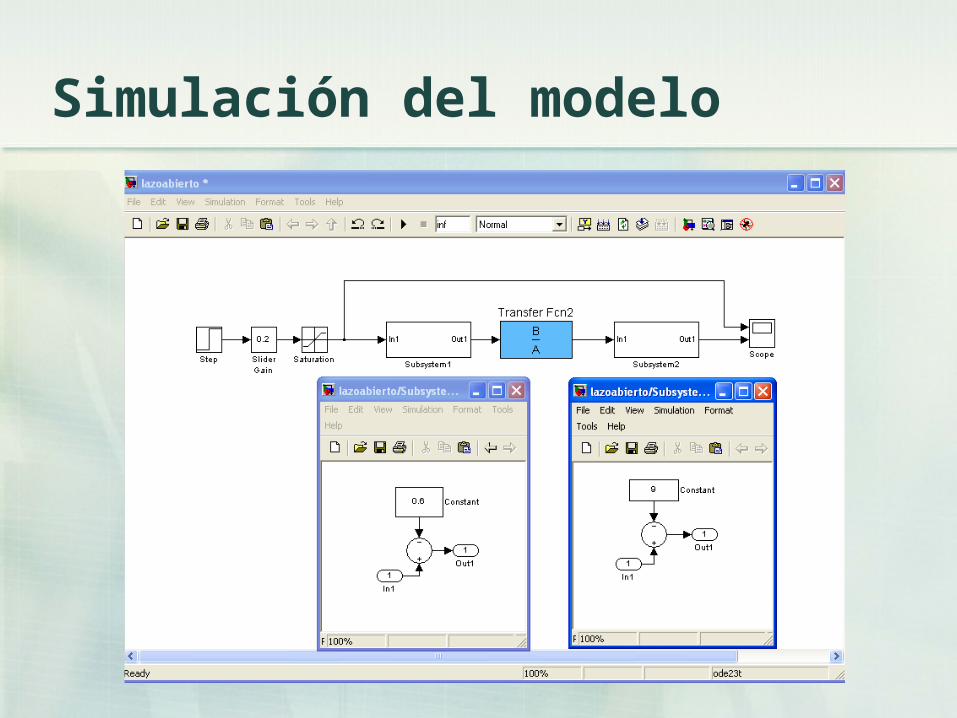
Simulación del modelo

Resultados de la Simulación

Diseño del controlador
Esquema de lazo cerrado de la planta

Función de transferencia y constantes del compensador

Pruebas con el controlador en la planta real
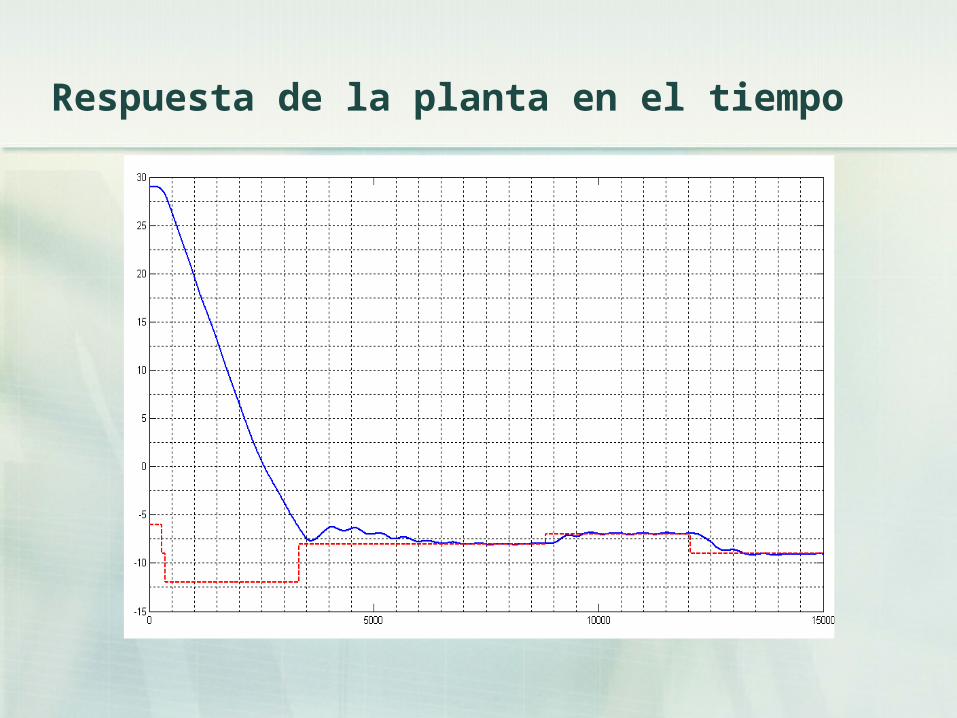
Respuesta de la planta en el tiempo

Conclusiones
Luego de realizar varias pruebas con diferente estructura de modelos, se puede concluir que el modelo que mejor se ajusta a nuestro sistema es el ARMAX.
Para la validación del modelo matemático determinado se usaron datos de pruebas con la planta real, los que demostraron que proceso de identificación fue realizado con éxito.

Recomendaciones
Realizar varias pruebas con varias señales de entrada para observar cual se aproxima más al original.
Seleccionar la variable de control que sea más lineal posible sino es el caso, intentar por medio del ordenador linealizarla.

¿…?

¡Muchas Gracias!

Un trabajo que aspira, aunque sea
humildemente, a ser considerado como una
pieza de arte, debe encontrar su justificación
en cada línea.
Joseph Conrad.