dpt. teoría de la señal, telemática y comunicaciones...
TRANSCRIPT
TSTC
Robótica IndustrialDpt. Teoría de la Señal, Telemática y Comunicaciones
Robótica IndustrialUniversidad de Granada
TSTC
Seminario: Sistemas Analógicos
Transformada de LaplaceS.1
Funciones de TransferenciaS.2
Introducción: Control S.0
Funciones de TransferenciaS.2
Sistemas de Segundo OrdenS.3
Características de la Respuesta TemporalS.4

TSTC
S0. Introducción
CONTROL: Método para conseguir que un conjunto de variables o
parámetros del entorno tengan valores pre-establecidos. (ej: temperatura habitación cte, guiar un satélite)
SISTEMAS DE CONTROL:Conjunto de elementos necesarios para Conjunto de elementos necesarios para
conseguir el objetivo de control.
SISTEMAS DE CONTROL EN ROBÓTICASistemas analógicos: Dispositivos en los que se manifiesta la relación causa-efecto para una
señal continua en el tiempo
TSTC
S0. Introducción
SISTEMAS DE CONTROL EN ROBÓTICASistemas Lineales Invariantes en el tiempo :
Muy usados ya que presentan propiedades que facilitan su estudio y dan buenas
aproximaciones locales de los sistemas reales.
Transformada de LaplaceHERRAMIENTA PARA EL ESTUDIO DE SISTEMAS LINEALES EN EL DOMINIO DEL TIEMPO, CUYO COMPORTAMIENTO SE MODELA MEDIANTE ECUACIONES DIFERENCIALES
TSTC
S1. Transformada de Laplace
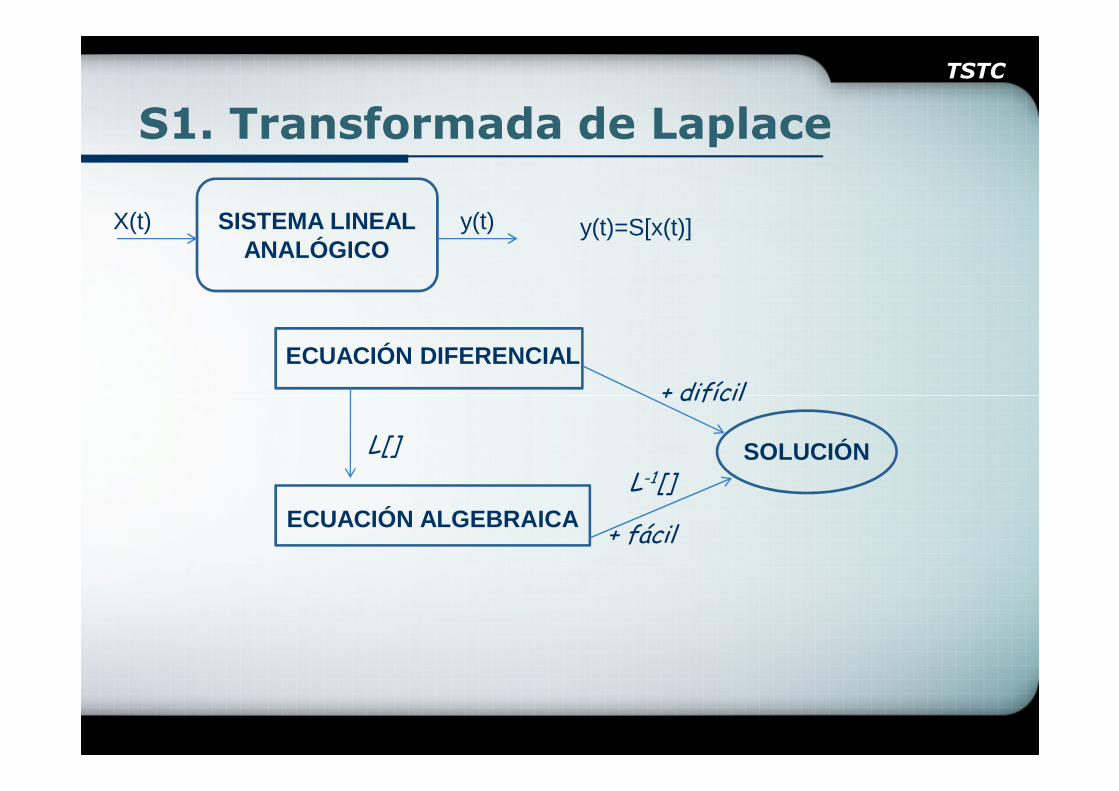
SISTEMA LINEAL ANALÓGICO
X(t) y(t) y(t)=S[x(t)]
ECUACIÓN DIFERENCIAL
+ difícil
ECUACIÓN ALGEBRAICA
SOLUCIÓN L[]
+ fácil
+ difícil
L-1[]
TSTC
S1. Transformada de Laplace
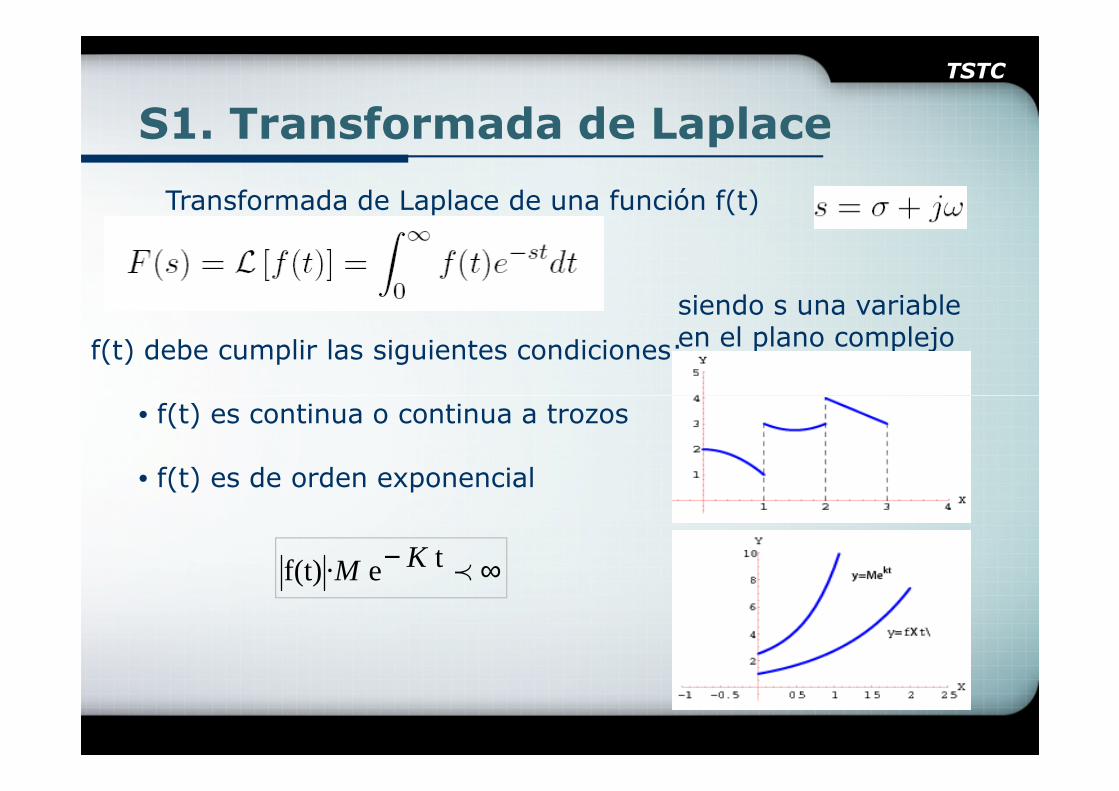
Transformada de Laplace de una función f(t)
siendo s una variable en el plano complejo f(t) debe cumplir las siguientes condiciones:
• f(t) es continua o continua a trozos
• f(t) es de orden exponencial
∞−p
te·f(t) KM

TSTC
S1. Transformada de Laplace
∫∞+
∞−
− ==·
·
1 )(··2
1)]([)(
jc
jc
stdsesFj
sFLtfπ
Transformada inversa de Laplace de una función F(s)
siendo C una constante real que deja a su izqda. todas las singularidades de F(s)
C
PLANO S
X
X
X

TSTC
S1. Transformada de Laplace
Propiedades importantes de la Transformada
1. Linealidad )(·)(·)](·)(·[ sGbsFatgbtfaL +=+
2. Transformada de la derivada
3. Transformada de la integral
4. Traslación en el plano s:

TSTC
S1. Transformada de Laplace
Propiedades importantes de la Transformada
5. Traslación en el plano temporal
6. Teorema del valor final:
)(·)]([
0
)()(
)]([)(
sFetgL
at
atatftg
tfLsFas−=
≥−
=
=
p
6. Teorema del valor final:
7. Teorema del valor inicial:

TSTC
S1. Transformada de Laplace
Ejemplos de Transformadas
Función escalón unitario:
escalón de altura A: X(s)=A/s
TSTC
S1. Transformada de Laplace
Ejemplos de Transformadas
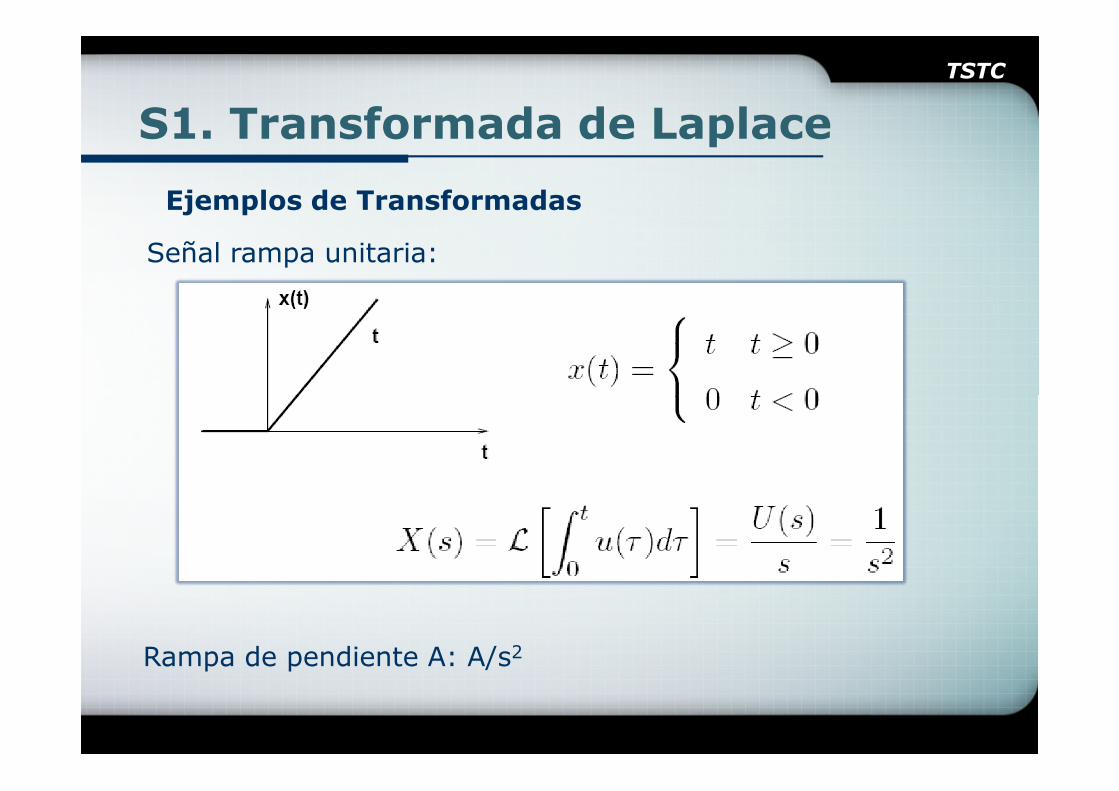
Señal rampa unitaria:
Rampa de pendiente A: A/s2

TSTC
S1. Transformada de Laplace
Ejemplos de Transformadas
Delta de Dirac:
TSTC
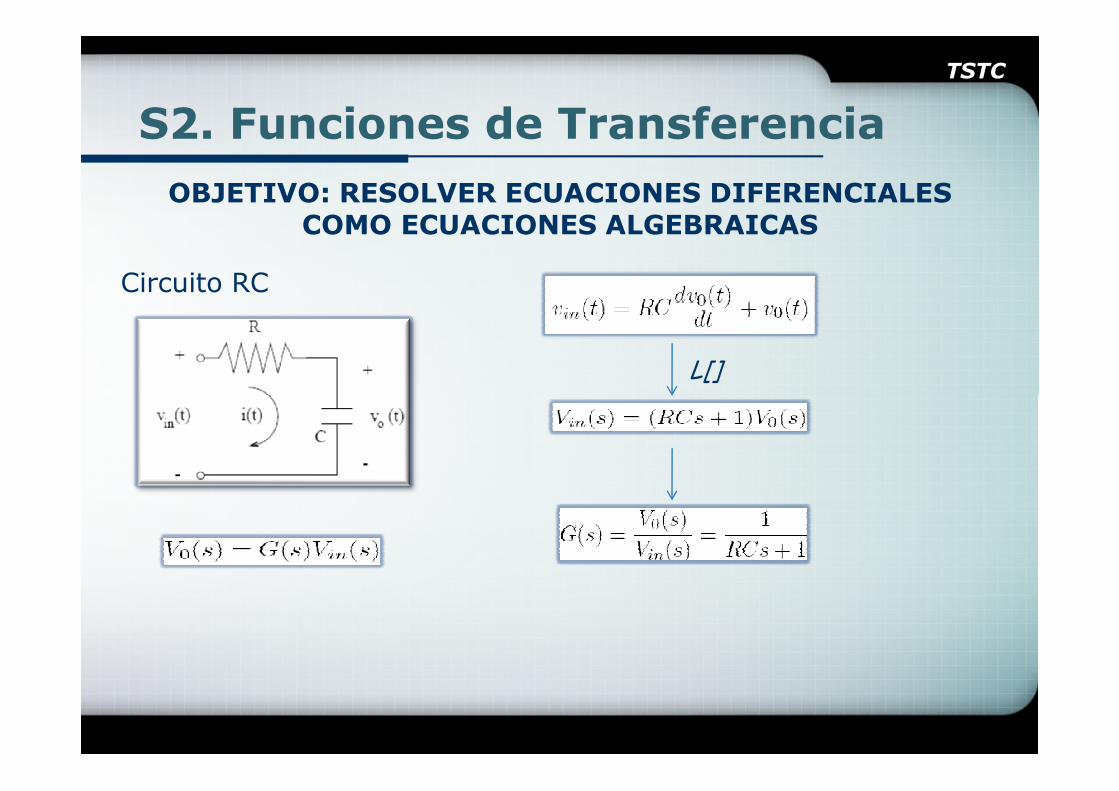
S2. Funciones de Transferencia OBJETIVO: RESOLVER ECUACIONES DIFERENCIALES
COMO ECUACIONES ALGEBRAICAS
L[]
Circuito RC

TSTC
S2. Funciones de Transferencia Cual es la respuesta de este sistema ante una tensión escalón unitario ?
TSTC
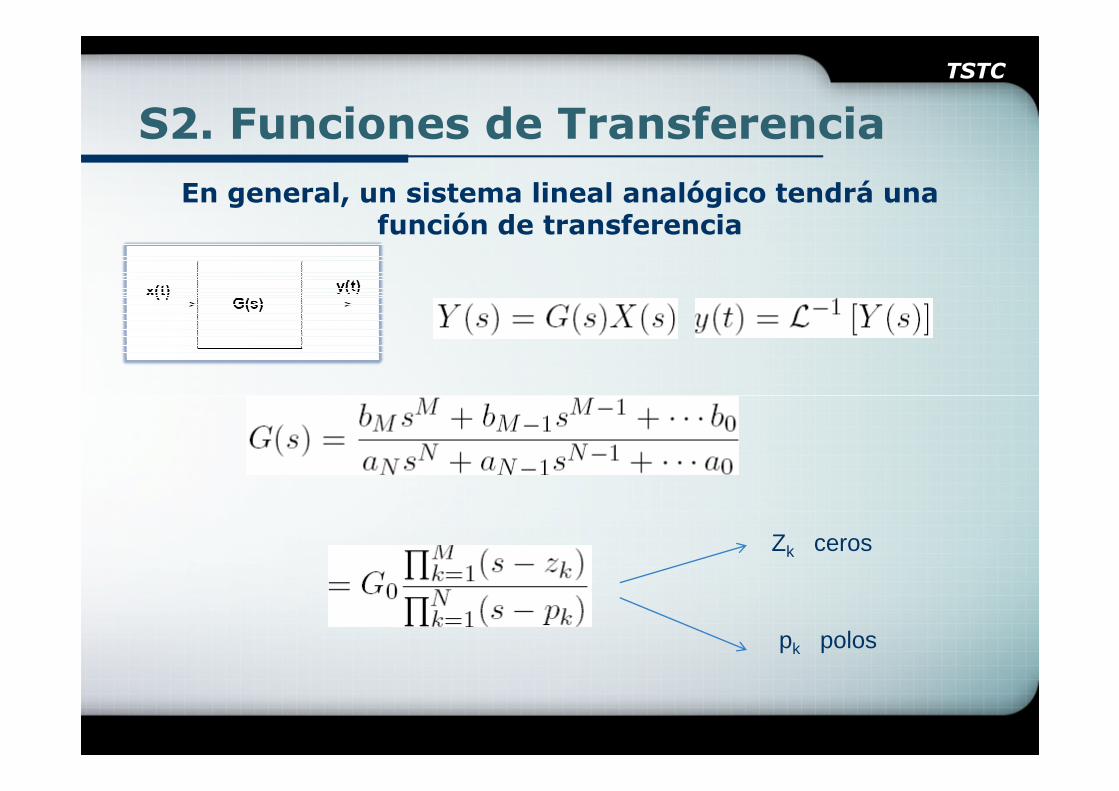
S2. Funciones de Transferencia En general, un sistema lineal analógico tendrá una
función de transferencia
Zk ceros
pk polos

TSTC
S2. Funciones de Transferencia Características de un sistema analógico
1. CAUSALIDAD: Un sistema es causal si la respuesta se produce siempre después de la entrada, y depende de valores
2. ESTABILIDAD:Un sistema es estable si para una entrada finita se produce siempre una Un sistema es estable si para una entrada finita se produce siempre una respuesta finita.

TSTC
S3. Sistemas de Segundo Orden
Primer Orden: Cuando del denominador de la función de transferencia es un polinomio de primer orden un polinomio de primer orden
El sistema será estable si el polo p está en el semiplano S izquierdo

TSTC
S3. Sistemas de Segundo Orden
3 posibles factores de amortiguamiento:3 posibles factores de amortiguamiento:

TSTC
S3. Sistemas de Segundo Orden

TSTC
S3. Sistemas de Segundo Orden Oscilación y amortiguación
Un valor típico: 0.707 quecorresponde a una respuesta en frecuencia plana: F. de Butterworth
Sistema críticamente amortiguado.Se usa este valor cuando se busca la respuesta más rápida sin oscilación
Sólo amortiguación
TSTC
S4.Caract. Respuesta Temporal
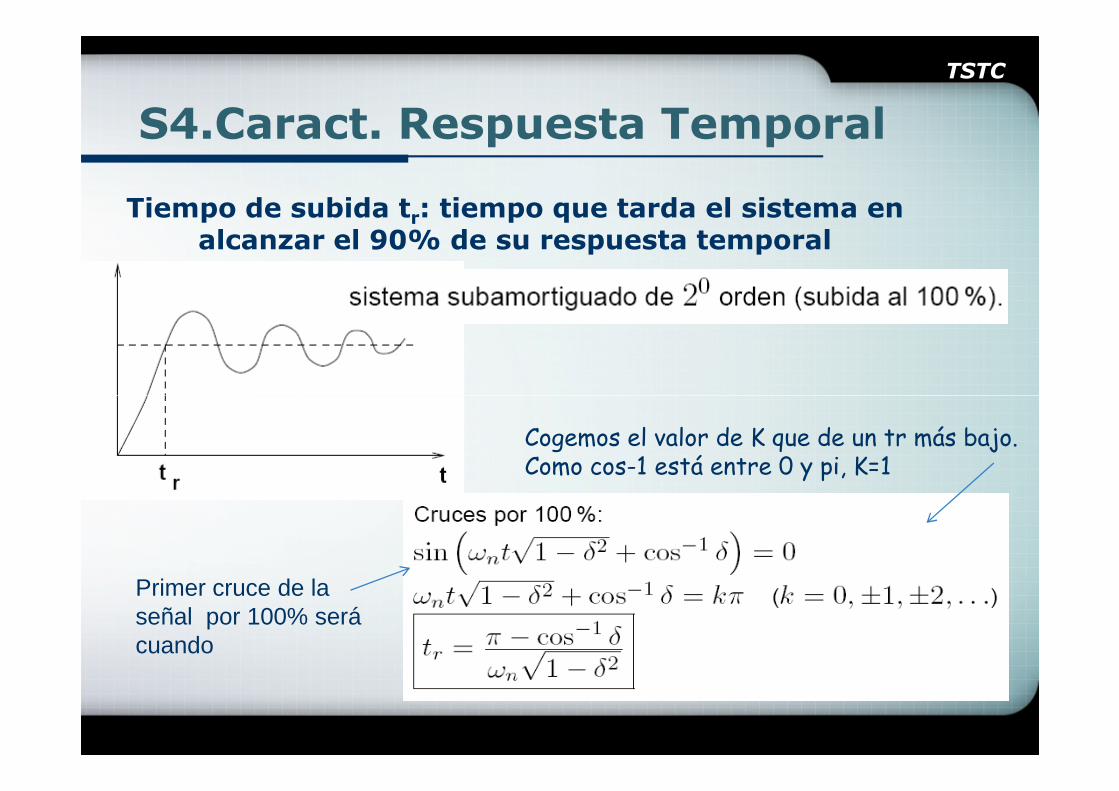
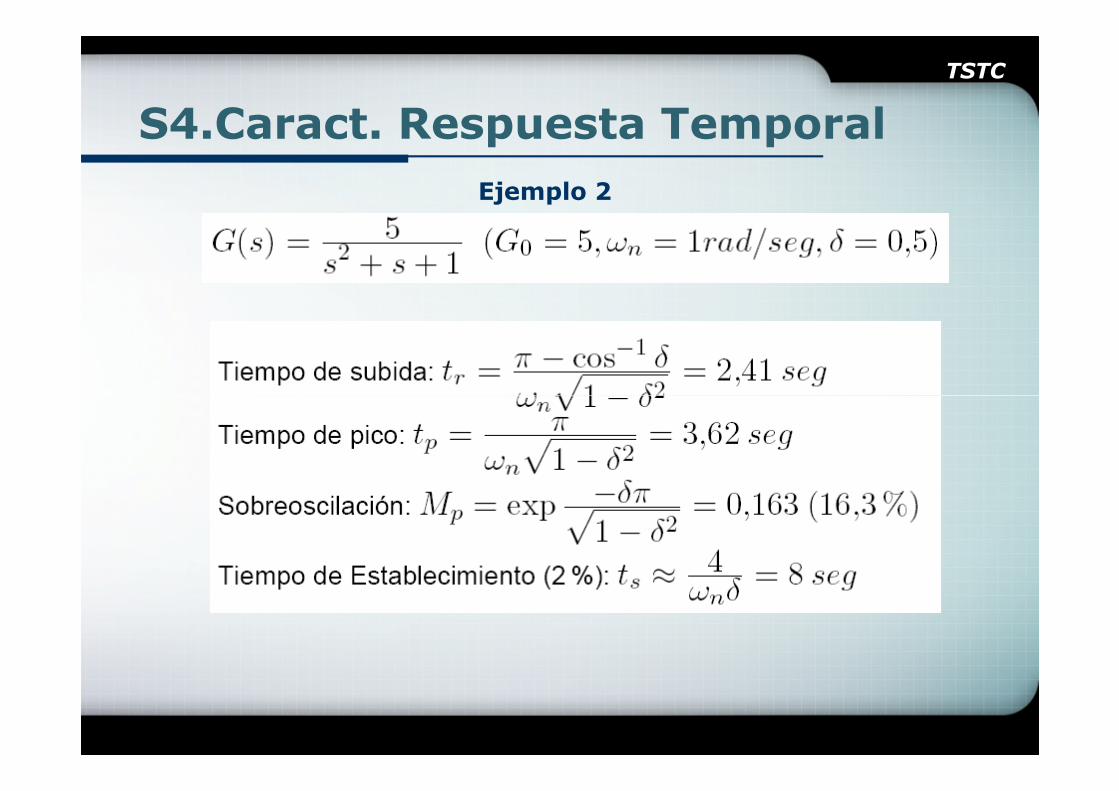
Tiempo de subida tr: tiempo que tarda el sistema en alcanzar el 90% de su respuesta temporal
Primer cruce de la señal por 100% será cuando
Cogemos el valor de K que de un tr más bajo. Como cos-1 está entre 0 y pi, K=1
TSTC
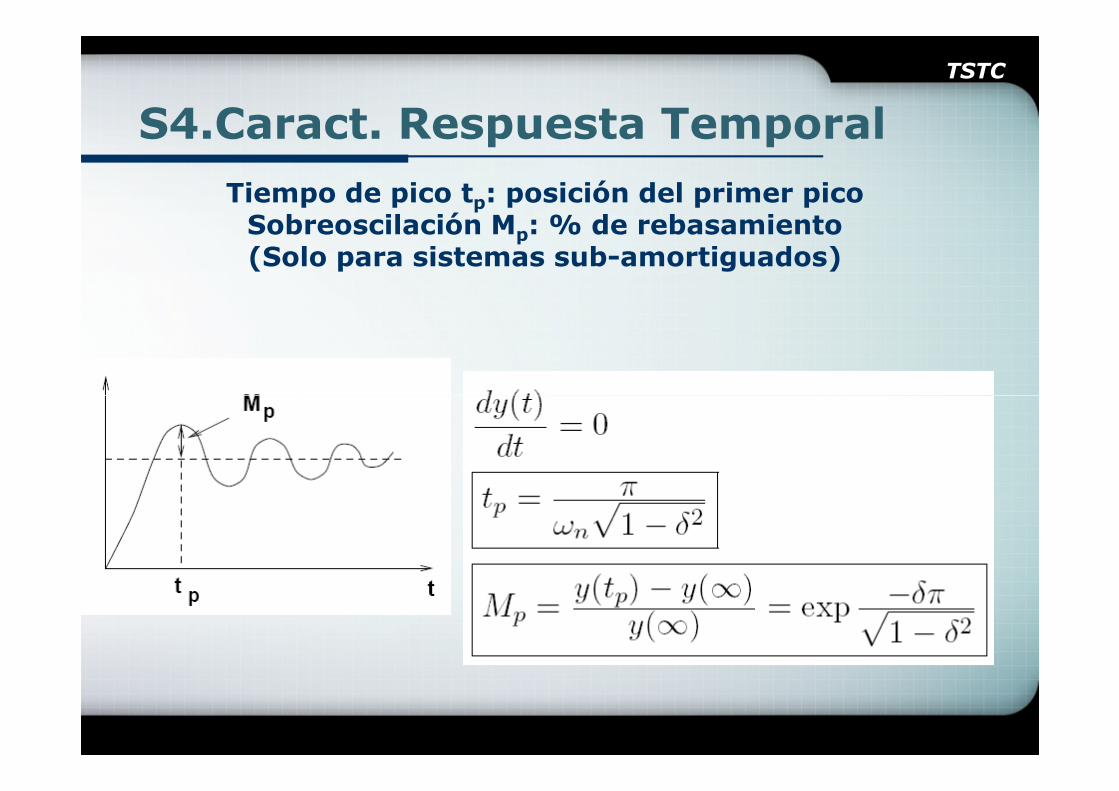
S4.Caract. Respuesta Temporal Tiempo de pico tp: posición del primer picoSobreoscilación Mp: % de rebasamiento(Solo para sistemas sub-amortiguados)
TSTC
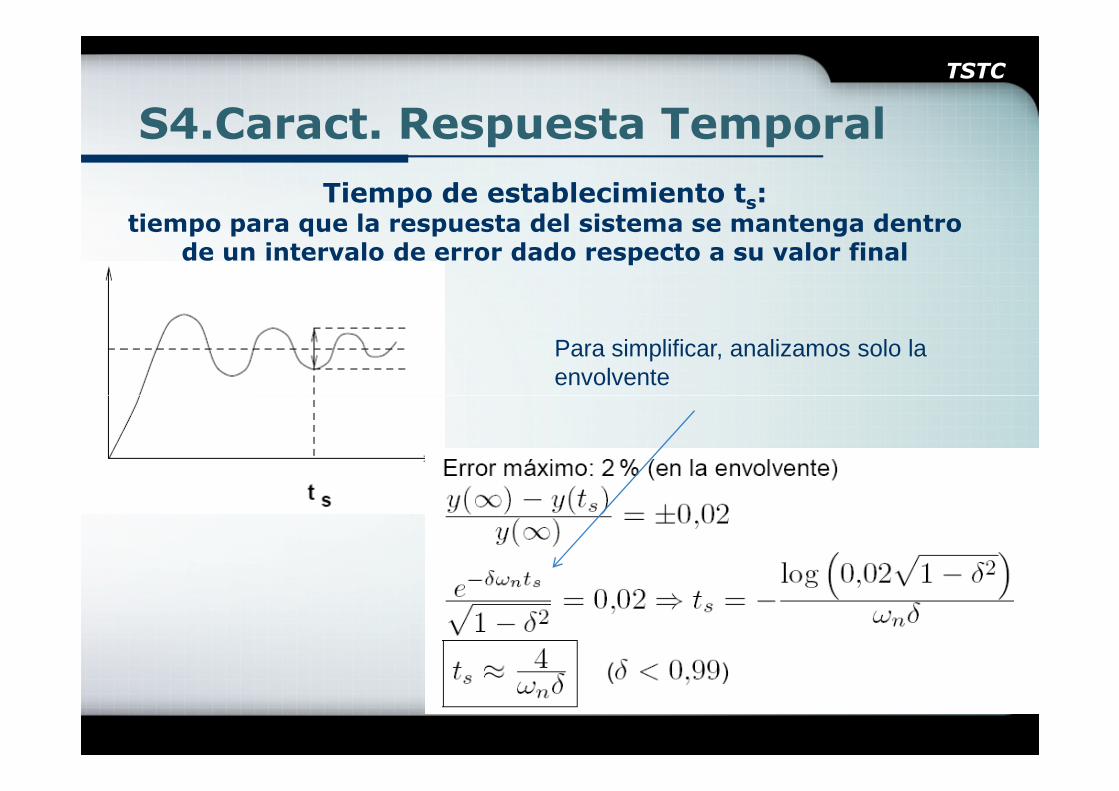
S4.Caract. Respuesta Temporal Tiempo de establecimiento ts:
tiempo para que la respuesta del sistema se mantenga dentro de un intervalo de error dado respecto a su valor final
Para simplificar, analizamos solo la envolvente
TSTC
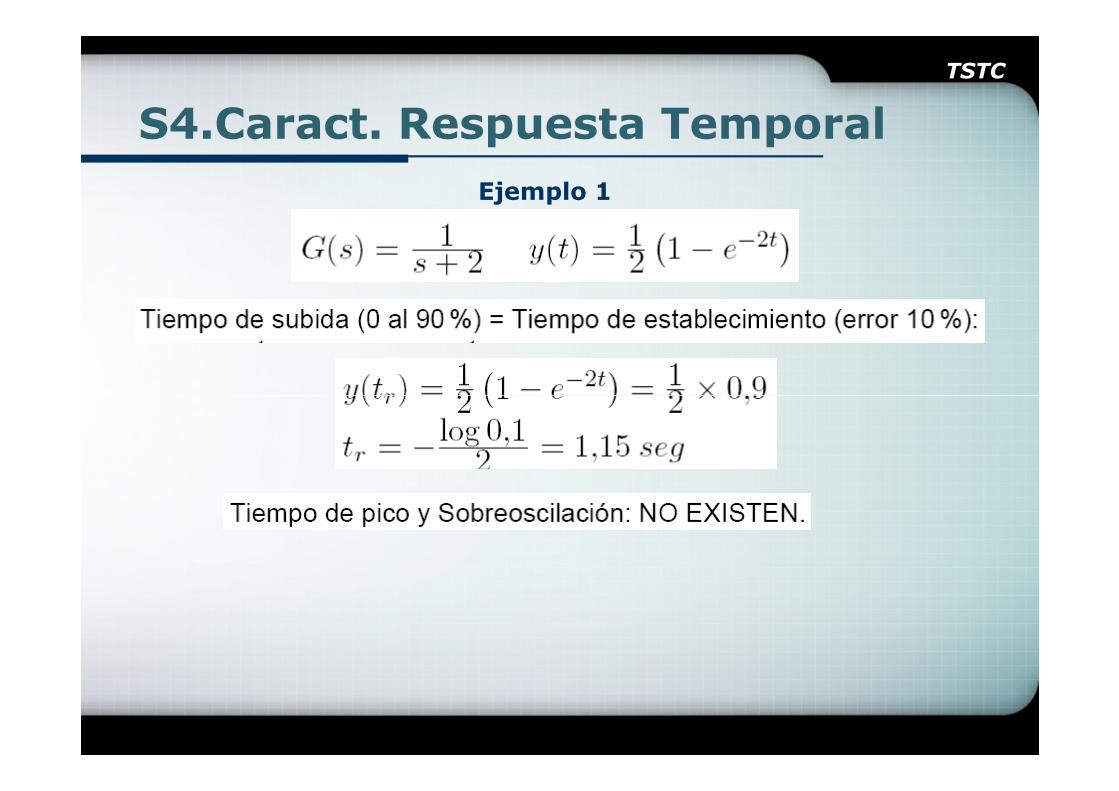
S4.Caract. Respuesta Temporal Ejemplo 1
TSTC
S4.Caract. Respuesta Temporal Ejemplo 2
TSTC
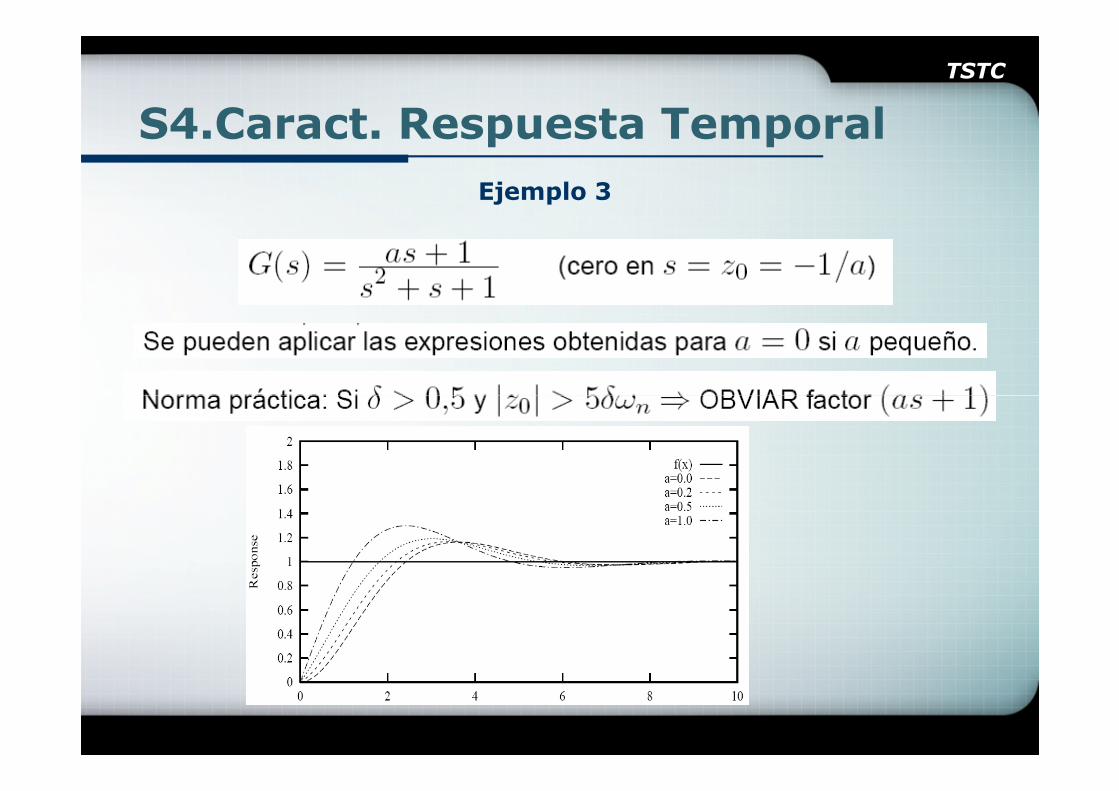
S4.Caract. Respuesta Temporal Ejemplo 3
TSTC
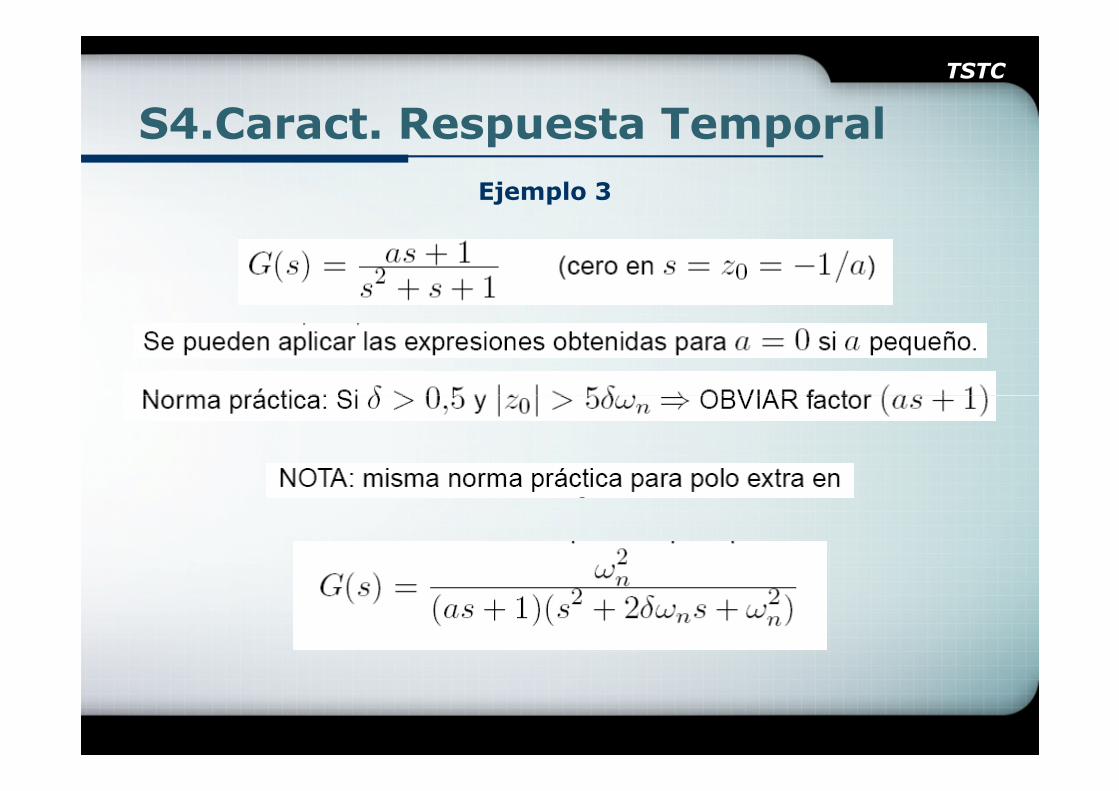
S4.Caract. Respuesta Temporal Ejemplo 3