diseño, construcción y modelo dinámico de un...
TRANSCRIPT
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Tema A3b. Mecanismos y Robótica: Seguimiento de trayectorias de robots móviles.
“Diseño, construcción y modelo dinámico de un robot móvil de tracción diferencial aplicado al seguimiento de trayectorias”
Daniel Eduardo Hernández Sáncheza*, José Ramón Eguibar Cuencab, Carmen Cortés Sánchezb,
José Fernando Reyes Cortésa
aFacultad de Ciencias de la Electrónica, Maestría en Ciencias de la Electrónica Opción en Automatización, Benemérita Universidad Autónoma de Puebla.
Av. San Claudio y 18 Sur Edif. FCE6, Ciudad Universitaria, Col. Jardines de San Manuel, Puebla, Puebla, C.P. 72570, México. bInstituto de Fisiología, Benemérita Universidad Autónoma de Puebla. Av.14 Sur 6301, Edif. IFI2, Col. Jardines de San Manuel, Puebla, Puebla, C.P.
72570, México.
*Autor de contacto. Dirección de correo electrónico: [email protected]
R E S U M E N
Los robots móviles son capaces de realizar movimientos en espacios de trabajo ilimitados en comparación a los robots
manipuladores y uno de sus principales objetivos es efectuar de forma autónoma movimientos planificados con gran
exactitud, para esto se requiere diseñar estructuras de control que mejoren la respuesta del robot. Por lo tanto, en este trabajo
se presenta el diseño y análisis matemático de una estructura de control acotada, que en conjunto con el estudio de la
cinemática y la dinámica de un robot móvil de configuración diferencial permite simular y analizar el comportamiento que
el robot móvil presenta al efectuar una trayectoria deseada, los resultados obtenidos se comparan con la respuesta adquirida
al simular la dinámica asociada a un controlador PD bajo la misma trayectoria.
Palabras Clave: Robot móvil de tracción diferencial, cinemática, dinámica, estructura de control, control de trayectoria.
A B S T R A C T
The mobile robots are able to perform movements in unlimited workspaces compared to manipulator robots and one of their
main objectives is to carry out autonomously planned movements with great accuracy, for this, it is necessary to design
control structures that improve the robot's response. Therefore, in this work we present the mathematical design and analysis,
of a bounded control structure, which together with the study of the kinematics and dynamics of a mobile robot of differential
configuration allows us to simulate and analyze the behavior that the mobile robot presents, when it performs a desired
trajectory. The results obtained are compared with the response acquired by simulating the dynamics associated with the PD
controller, under the same trajectory.
Keywords: differential drive mobile robot, kinematic, dynamic, control structure, trajectory tracking.
1. Introducción
El desarrollo de robots móviles responde a la necesidad de
extender el campo de la aplicación de la robótica, su
importancia radica principalmente en que poseen un espacio
de trabajo ilimitado, a diferencia de los robots
manipuladores fijos los cuales están restringidos a cumplir
tareas dentro de un espacio de trabajo determinado por sus
dimensiones físicas. Por lo tanto, con la finalidad de
aumentar la movilidad del robot y de esta manera su
capacidad de trabajo, se hace uso de un sistema locomotor
ISSN 2448-5551 MT 1 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
para que el robot pueda desplazarse libremente en su espacio
de trabajo [1].
A diferencia de los robots fijos, los robots móviles
cambian con cada movimiento la posición y orientación de
su eje de coordenadas base. Por consiguiente, deben
reconocer constantemente el ambiente donde se mueven
para poder adaptarse adecuadamente. Para que un sistema
robótico móvil pueda ser exitoso necesita contar con una
buena etapa de sensado y tener cierto grado de autonomía
[2].
Los robots móviles deben ser capaces de ejecutar de
forma autónoma movimientos previamente planificados
para lo cual se requiere formular leyes de control que
permitan estabilizar el vehículo sobre un punto de trabajo,
anulando el efecto de las perturbaciones y manteniendo
acotadas las señales de control [3].
Por tal motivo, se diseña una estructura de control que
presenta un mejor desempeño y robustez comparado con el
de un controlador PD. Para evaluar el desempeño del
controlador previamente mencionado, se elige un robot
móvil de tracción diferencial ya que este es capaz de
moverse en línea recta, girar sobre sí mismo y trazar curvas
[1], su construcción es relativamente fácil y se logra una
mejor movilidad en terrenos suficientemente duros y libres
de obstáculos, permitiendo conseguir velocidades
relativamente altas [3], lo que resulta adecuado para este
tipo de análisis. Con base en esta configuración, se
desarrolla la cinemática que describe la posición y
orientación del robot móvil y posteriormente se realiza la
dinámica debido a que esta debe ser incluida en la estructura
matemática de los algoritmos de control [1]. Finalmente, se
presentan los resultados que se obtienen al realizar la
simulación de la dinámica en conjunto con la propuesta de
controlador y al controlador PD, lo que permite efectuar una
comparación de la respuesta que presenta cada uno de los
algoritmos.
2. Cinemática y dinámica
El modelado cinemático es el estudio de movimiento de
sistemas mecánicos sin considerar las fuerzas que afectan
dicho movimiento. Para el robot móvil de direccionamiento
diferencial, el propósito principal del modelado cinemático
es representar la velocidad del robot en función a las
velocidades de las ruedas conjuntamente a los parámetros
geométricos del robot [4].
Un robot móvil con ruedas es un dispositivo que debe
moverse sobre una superficie mediante la acción de ruedas
montadas en él, se asumen las siguientes hipótesis:
El robot móvil se mueve sobre una superficie plana
horizontal, es decir la energía potencial es constante.
Los ejes de referencia son perpendiculares al suelo.
No existen elementos flexibles en la estructura del
robot, incluyendo las ruedas.
El contacto entre cada rueda y el suelo se reduce a un
solo punto.
No existe deslizamiento.
De acuerdo con las hipótesis anteriores, se aborda el caso
bidimensional debido a que el robot solo se mueve en un
plano [1].
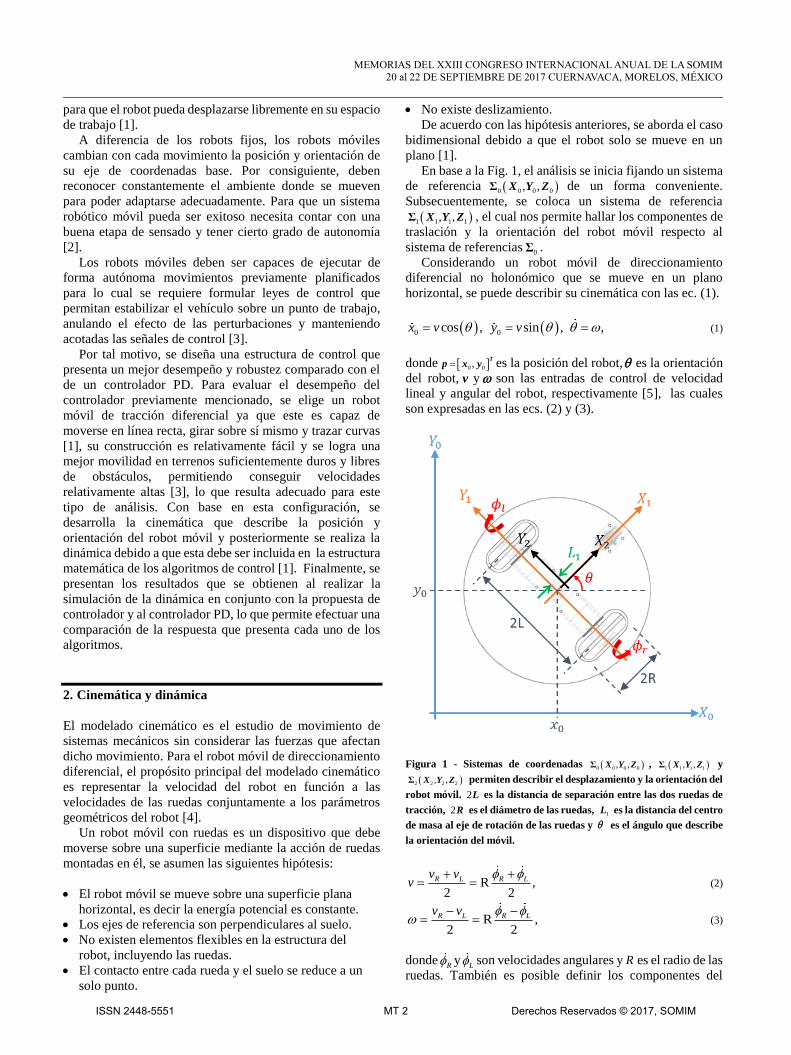
En base a la Fig. 1, el análisis se inicia fijando un sistema
de referencia 00 0 0, ,Σ X Y Z de un forma conveniente.
Subsecuentemente, se coloca un sistema de referencia
1 1 1 1, ,Σ X Y Z , el cual nos permite hallar los componentes de
traslación y la orientación del robot móvil respecto al
sistema de referencias0Σ .
Considerando un robot móvil de direccionamiento
diferencial no holonómico que se mueve en un plano
horizontal, se puede describir su cinemática con las ec. (1).
0 0cos , sin , ,x v y v (1)
donde 0 0,T
p x y es la posición del robot, es la orientación
del robot, v y son las entradas de control de velocidad
lineal y angular del robot, respectivamente [5], las cuales
son expresadas en las ecs. (2) y (3).
Figura 1 - Sistemas de coordenadas 00 0 0, ,Σ X Y Z , 1 1 1 1, ,Σ X Y Z y
2 2 2 2, ,Σ X Y Z permiten describir el desplazamiento y la orientación del
robot móvil. 2L es la distancia de separación entre las dos ruedas de
tracción, 2R es el diámetro de las ruedas, 1L es la distancia del centro
de masa al eje de rotación de las ruedas y es el ángulo que describe
la orientación del móvil.
R ,2 2
R L R Lv vv
(2)
R ,2 2
R L R Lv v
(3)
dondeR y
L son velocidades angulares y R es el radio de las
ruedas. También es posible definir los componentes del
ISSN 2448-5551 MT 2 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
centro de masa de como se observa en la ec. (4).
2 0 1 2 0 1cos( ), cos( ).x x L y y L (4)
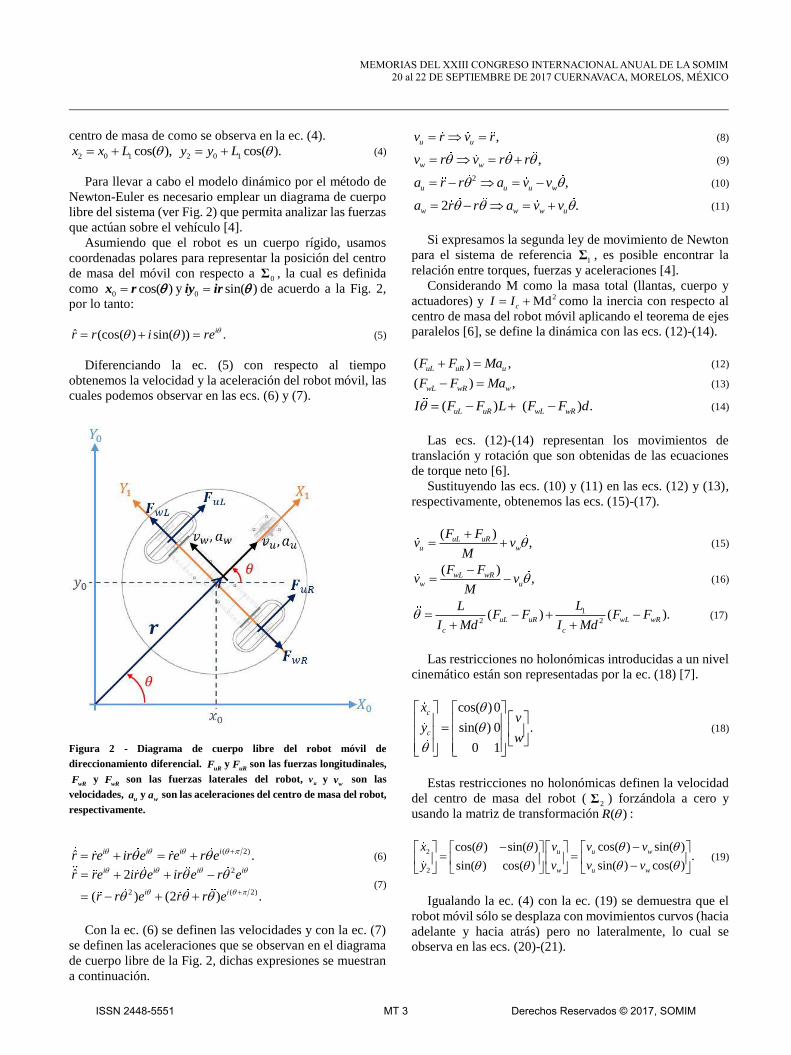
Para llevar a cabo el modelo dinámico por el método de
Newton-Euler es necesario emplear un diagrama de cuerpo
libre del sistema (ver Fig. 2) que permita analizar las fuerzas
que actúan sobre el vehículo [4].
Asumiendo que el robot es un cuerpo rígido, usamos
coordenadas polares para representar la posición del centro
de masa del móvil con respecto a 0Σ , la cual es definida
como 0 cos( )x r y
0 sin( )iy ir de acuerdo a la Fig. 2,
por lo tanto:
ˆ (cos( ) sin( )) .ir r i re (5)
Diferenciando la ec. (5) con respecto al tiempo
obtenemos la velocidad y la aceleración del robot móvil, las
cuales podemos observar en las ecs. (6) y (7).
Figura 2 - Diagrama de cuerpo libre del robot móvil de
direccionamiento diferencial. uR
F yuR
F son las fuerzas longitudinales,
wRF y
wRF son las fuerzas laterales del robot, uv y
wv son las
velocidades, u
a yw
a son las aceleraciones del centro de masa del robot,
respectivamente.
( 2)ˆ .i i i ir re ir e re r e (6)
2
2 ( 2)
ˆ 2
( ) (2 ) .
i i i i
i i
r re ir e ir e r e
r r e r r e
(7)
Con la ec. (6) se definen las velocidades y con la ec. (7)
se definen las aceleraciones que se observan en el diagrama
de cuerpo libre de la Fig. 2, dichas expresiones se muestran
a continuación.
,u uv r v r (8)
,w wv r v r r (9)
2 ,u u u wa r r a v v (10)
2 .w w w ua r r a v v (11)
Si expresamos la segunda ley de movimiento de Newton
para el sistema de referencia 1Σ , es posible encontrar la
relación entre torques, fuerzas y aceleraciones [4].
Considerando M como la masa total (llantas, cuerpo y
actuadores) y 2MdcI I como la inercia con respecto al
centro de masa del robot móvil aplicando el teorema de ejes
paralelos [6], se define la dinámica con las ecs. (12)-(14).
( ,)uL uR uF F Ma (12)
( ,)wL wR wF F Ma (13)
( .) ( )uL uR wL wRI F F L F F d (14)
Las ecs. (12)-(14) representan los movimientos de
translación y rotación que son obtenidas de las ecuaciones
de torque neto [6].
Sustituyendo las ecs. (10) y (11) en las ecs. (12) y (13),
respectivamente, obtenemos las ecs. (15)-(17).
(,
)uL uR
u w
F Fv v
M
(15)
(,
)wL wR
w uM
F Fv v
(16)
1
2 2( ) ( ).uL uR wL wR
c c
LLF F F F
I Md I Md
(17)
Las restricciones no holonómicas introducidas a un nivel
cinemático están son representadas por la ec. (18) [7].
cos( )0
sin( ) 0 .
0 1
c
c
xv
yw
(18)
Estas restricciones no holonómicas definen la velocidad
del centro de masa del robot (2Σ ) forzándola a cero y
usando la matriz de transformación ( )R :
2
2
cos( ) sin( )cos( ) sin( ).
sin( ) cos( )sin( ) cos( )
u u w
w u w
v v vx
v v vy
(19)
Igualando la ec. (4) con la ec. (19) se demuestra que el
robot móvil sólo se desplaza con movimientos curvos (hacia
adelante y hacia atrás) pero no lateralmente, lo cual se
observa en las ecs. (20)-(21).
ISSN 2448-5551 MT 3 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
0 1
0 1
cos( ) cos( ) sin( ).
cos( ) sin( ) cos( )
u w
u w
x L v v
y L v v
(20)
Se aplican las propiedades de matrices de rotación y las
reglas de rotación para determinar la orientación del sistema
de referencia1Σ con respecto a
2Σ [8], con lo que se obtiene
1 1 wy v L y, al igualarla con cero se demuestra que el
punto0 0( , )x y con respecto a
0Σ es:
1 .wv L (21)
Al sustituir la ec. (21) en las ecs. (15) y (16) e
incorpóralas en la ec. (17) obtenemos las ecs. (22) y (23).
2
1
),
( uL uR
u
F Fv L
M
(22)
2
1 1( ).) (c u L R
LI ML ML v
R (23)
Las ecs. (22) y (23) se expresan en forma matricial como se
observa en la ec. (24).
1
2
1 1
0 0 1 11.
0 0c
Lu u
R
M v v
L
ML
I ML RML L
(24)
3. Estructura de control.
El objetivo de control de posición se refiere a encontrar un
ley de control que nos proporcione los pares aplicados o
torques a cada una de las articulaciones del robot, tal que la
posición actual del robot (t)q y su velocidad articular de
movimiento (t)q tiendan asintóticamente hacia la posición
deseada d
q y velocidad cero, respectivamente; sin importar
las condiciones iniciales. En otras palabras, como el tiempo
t evoluciona al infinitot se debe satisfacer la
convergencia de [9]:
(t)lim .
(t) 0
d
t
q q
q
(25)
3.1. Propuesta de estructura de control
Para comenzar dicho análisis, se considera la siguiente
estructura de control:
2 2
2 2
cosh(q )sinh(q ) cosh(q )sinh(q )
1 cosh (q ) 1 cosh (q )0 0,
cosh(q )sinh(q ) cosh(q )sinh(q )0 0
1 cosh (q ) 1 cosh (q )
x x
y y
x x x x
x xp vL
p vy y y yR
y y
k k
k k
(26)
donde la ganancia proporcional 2 2 x
pk y la ganancia
derivativa 2 2 x
vk son matrices diagonales y 2 x1q es
el error de posición ( ).dq q
Del mismo modo, se considera la estructura general de la
dinámica del robot móvil dada por la ec. (27).
( ) ( ), .M q q C q q q (27)
Donde:
2 2( ) xM q es la matriz de masas e inercias.
2 1xq es el vector de aceleraciones.
2 2, ( ) xC q q es la matriz de Coriolis.
2 1xq es el vector de velocidades.
Se genera un punto de equilibrio estable en el sentido de
Lyapunov, la estabilidad del punto de equilibrio se
demuestra con el teorema de LaSalle [10] al igualar la forma
general de la ec. (26) con la ec. (27).
2 2
cosh(q)sinh(q) cosh(q)sinh(q)( ) ( )
1 c,
osh (q) 1 cosh (q).p vM q q C q q q k k
(28)
Es posible expresar la ec. (28) en variables de estado para
definir la ecuación de lazo cerrado como se observa en la ec.
(29).
1
2 2
.cosh(q)sinh(q) cosh(q)sinh(q)(q) ( )
1 cosh (q) 1,
cosh (q)p vk k
qqd
Mqdt C q q
(29)
Para demostrar que el punto de equilibrio de la ecuación
de lazo cerrado es estable, consideramos la siguiente función
candidata de Lyapunov:
2 21 1, 1 co( ) ( ) [ln( ( ))]sh 1 cosh[ln( ( ))],
2 2
T T
pV q q q M q q q k q (30)
donde ,( )V q q es definida positiva ya que el primer término
es positivo debido a que en la energía cinética la matriz
( )M q es definida positiva [1] y el segundo término es la
energía potencial artificial con pk es definida positiva por
diseño y recordando que p
2 2( ), xM q k y 2 1, .xq q
Al aplicar la derivada temporal a la ec. (30) se obtiene la
ec. (31).
2
sinh( )cosh( )( ) ( )
(
1, (q)q .
2 1 cos )h
pT Tq q k q
V q q q M q q q Mq
(31)
De la ec. (29) retomamos la aceleración ( )q , la cual es
sustituida en la ec. (31), obteniendo la ec. (32).
2 2
2
sinh( )cosh( ) sinh( )cosh( )( )
( ) (,
1 cosh 1 cosh
1C( ,
)
sinh( )cosh) ( ) .
2 1 cosh
( )
( )
T
p p
T T T
v
q q q qV q q q k k q
q q
q qq q q q M q q q k
q
(32)
En la ec. (32) el primer término se cancela con el
segundo, el tercero se cancela con el cuarto al aplicar la
propiedad de antisimetría [1], resultando la ec. (33).
ISSN 2448-5551 MT 4 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
2
sinh( )cosh( )( , 0.
1)
)c (osh
T
v
q qV q q q k
q
(33)
Por lo que queda demostrada la estabilidad global del
punto de equilibrio en la ecuación de lazo cerrado.
3.2. Estructura de control PD
El control proporcional derivativo está dado por la siguiente
ecuación:
0 0,
0 0
x x
y y
p vx xL
p vy yR
k kq q
k kq q
(34)
El análisis sobre la existencia, unicidad y estabilidad del
punto de equilibrio de este algoritmo de control está
ampliamente documentado [1, 10].
Después de comprobar la estabilidad de ambos
controladores se puede simular una trayectoria simple para
poder comparar el desempeño de cada uno.
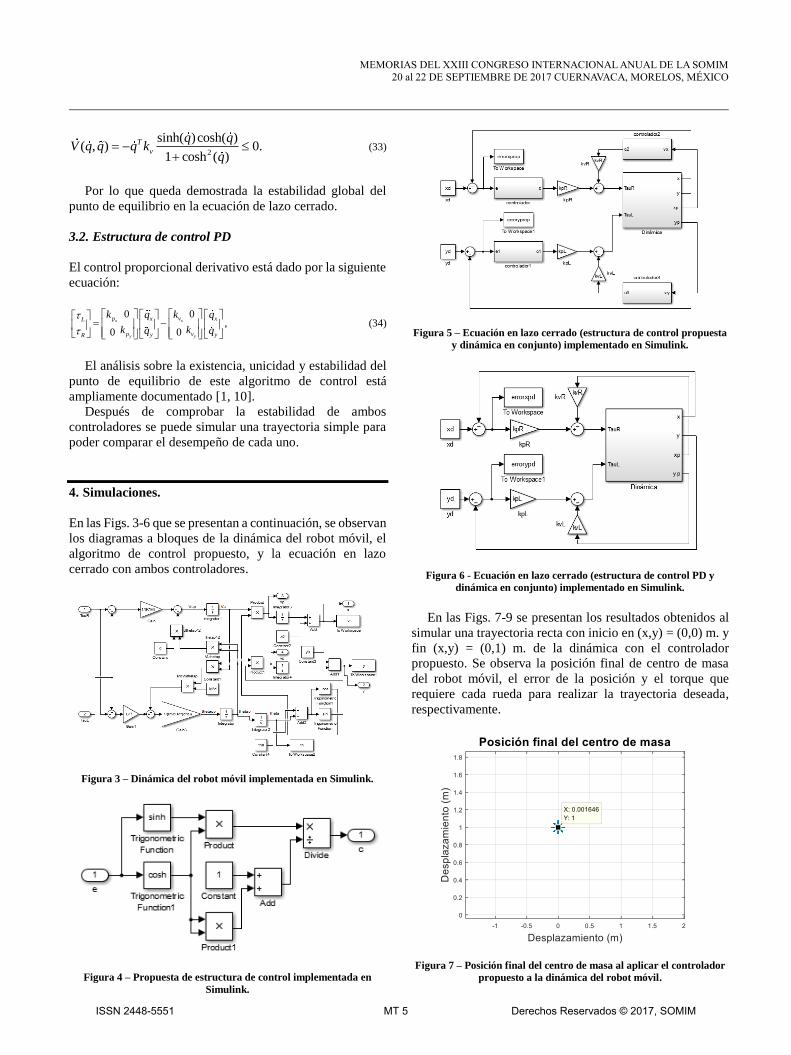
4. Simulaciones.
En las Figs. 3-6 que se presentan a continuación, se observan
los diagramas a bloques de la dinámica del robot móvil, el
algoritmo de control propuesto, y la ecuación en lazo
cerrado con ambos controladores.
Figura 3 – Dinámica del robot móvil implementada en Simulink.
Figura 4 – Propuesta de estructura de control implementada en
Simulink.
Figura 5 – Ecuación en lazo cerrado (estructura de control propuesta
y dinámica en conjunto) implementado en Simulink.
Figura 6 - Ecuación en lazo cerrado (estructura de control PD y
dinámica en conjunto) implementado en Simulink.
En las Figs. 7-9 se presentan los resultados obtenidos al
simular una trayectoria recta con inicio en (x,y) = (0,0) m. y
fin (x,y) = (0,1) m. de la dinámica con el controlador
propuesto. Se observa la posición final de centro de masa
del robot móvil, el error de la posición y el torque que
requiere cada rueda para realizar la trayectoria deseada,
respectivamente.
Figura 7 – Posición final del centro de masa al aplicar el controlador
propuesto a la dinámica del robot móvil.
ISSN 2448-5551 MT 5 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Figure 8 - Error de posición del centro de masa del robot móvil
aplicando el controlador propuesto.
Figura 9 – Torque requerido por cada rueda para realizar la
trayectoria deseada al aplicar el controlador propuesto a la dinámica
del robot móvil.
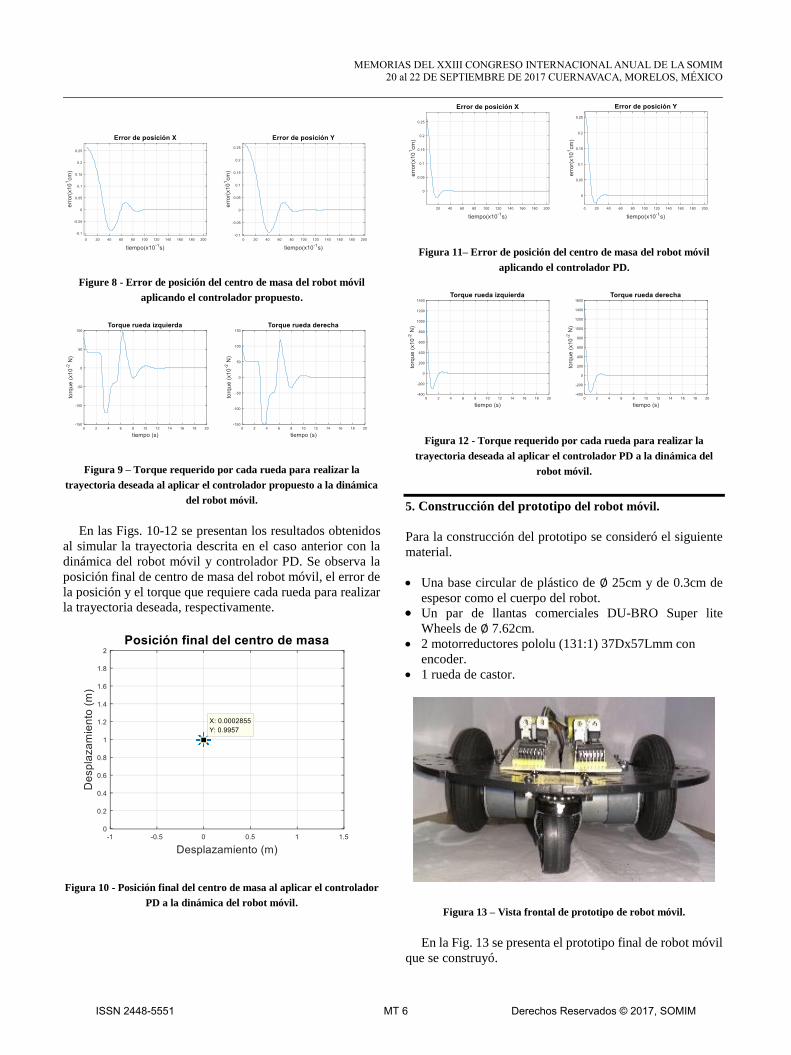
En las Figs. 10-12 se presentan los resultados obtenidos
al simular la trayectoria descrita en el caso anterior con la
dinámica del robot móvil y controlador PD. Se observa la
posición final de centro de masa del robot móvil, el error de
la posición y el torque que requiere cada rueda para realizar
la trayectoria deseada, respectivamente.
Figura 10 - Posición final del centro de masa al aplicar el controlador
PD a la dinámica del robot móvil.
Figura 11– Error de posición del centro de masa del robot móvil
aplicando el controlador PD.
Figura 12 - Torque requerido por cada rueda para realizar la
trayectoria deseada al aplicar el controlador PD a la dinámica del
robot móvil.
5. Construcción del prototipo del robot móvil.
Para la construcción del prototipo se consideró el siguiente
material.
Una base circular de plástico de ∅ 25cm y de 0.3cm de
espesor como el cuerpo del robot.
Un par de llantas comerciales DU-BRO Super lite
Wheels de ∅ 7.62cm. 2 motorreductores pololu (131:1) 37Dx57Lmm con
encoder.
1 rueda de castor.
Figura 13 – Vista frontal de prototipo de robot móvil.
En la Fig. 13 se presenta el prototipo final de robot móvil
que se construyó.
ISSN 2448-5551 MT 6 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
6. Conclusión
Como se aprecia en los resultados de las simulaciones se
logró desarrollar una estructura de control con un mejor
desempeño que el contralor PD. Al comparar la Figs. 7 y 10
se observa una mayor exactitud del controlador desarrollado
en la ubicación final del centro de masa del robot móvil, en
las Figs. 8 y 11 se observa que el estado transitorio que
presenta el controlador PD es más corto que el que presenta
el controlador desarrollado, lo que supondría una mejor
respuesta del controlador PD, lo cual resulta erróneo puesto
que, al comparar las Figs. 9 y 12 se demuestra que el
controlador PD requiere un torque máximo de 15 N. para
realizar la trayectoria deseada (por ser un controlador no
acotado), y aunque el motor no sea capaz de proporcionar
dicha energía, con esta acción se le exige trabajar en la zona
de saturación un mayor tiempo, afectado así el tiempo de
vida del motor. Esto no sucede en el caso del controlador
que se desarrolló debido a que por diseño, se limita la
energía que el controlador puede exigirle al motor, en los
resultados se observa que el toque máximo que requiere con
el controlador diseñado es de 1.2 N, por lo tanto, se
comprueba que nuestro diseño tiene un mejor desempeño.
Como trabajo a futuro se implementará el algoritmo
diseñado en el prototipo que se construyó, lo que permitirá
comprobar los resultados obtenidos en las simulaciones y en
caso de ser requerido se realizaran las adecuaciones
pertinentes.
REFERENCIAS
[1] J. F. Reyes Cortés, Robótica: Control de Robots
Manipuladores, 1ª Ed. Alfaomega, (pp. 131-133, 251-327, 336-342, 359-546), (2011).
[2] Pérez Arreguín, Tovar Arriaga, Villaseñor Carrillo, Gorrostieta Hurtado, Pedraza Ortega, Vargas Soto, Ramos Arreguín, Sotomayor Olmedo. Robot Móvil de Tracción Diferencial con Plataforma de Control Modular para Investigación y Desarrollo Ágil de Proyectos, (pp. 78,79). Universidad Autónoma de Querétaro (2011).
[3] A. Ollero Baturone, Robótica: Manipuladores y robots móviles, 1ª Ed. Marcombo, (pp. 28-30, 258, 259), Barcelona (2001).
[4] R. Dhaouadi, A. Abu Hatab. Dynamic modelling of differential-drive mobile robots using lagrange and newton-euler methodologies: a unified framework. Adv Robot Autom. (2013).
[5] X. Chen, F. Hao, B. Ma. Periodic event-triggered cooperative control of multiple non-holonomic wheeled mobile. IET Control Theory & Applications robots. (2017).
[6] R. Serway, J. Jewett. Physics for Scientists and Engineers with Modern Physics, 7a Ed. Thomson, (pp. 278-296). USA (2008).
[7] M. Yue, F, Tang, B. Liu, B. Yao. Trajectory-tracking control of a nonholonomic mobile robot: backstepping kinematics into dynamics with uncertain disturbances. Applied Artificial Intelligence, Taylor & Francis Group, (2012).
[8] J. F. Reyes Cortés. Matlab aplicado a robótica y Mecatrónica. 1ª Ed. Alfaomega, (pp. 148-170), (2012).
[9] F. Reyes Cortes, J. Cid Monjaraz, E Vargas Soto. Mecatrónica: Control y automatización. 1ª Ed. Alfaomega, (pp. 527), (2011).
[10] R. Kelly, V. Santibáñez. Control de movimiento de robots manipuladores, 1a Ed. Prentice Hall, (pp. 34-53, 143-147), (2003).
ISSN 2448-5551 MT 7 Derechos Reservados © 2017, SOMIM