conjuntos equidistantes
DESCRIPTION
Tesis de PatricioTRANSCRIPT
Universidad Católica de ChileFacultad de Matemática
Taller de Iniciación Científica
Conjuntos EquidistantesPatricio Santibáñez
Profesor Guía: Mario Ponce
Santiago - 13 de Diciembre de 2011
Este trabajo fue financiado parcialmente por el Proyecto FONDECYT 11090003
Índice
Índice 2
1. Introducción y Definiciones 3
2. Propiedades Topológicas 3
3. Comportamiento asintótico de los equidistantes 14
4. Sucesiones 27
5. Aplicación Computacional 28
Bibliografía 28
2

1. Introducción y Definiciones
En un espacio métrico (X, !), al conjunto de puntos que se encuentra a la misma distancia de dosconjuntos A y B se le denomina conjunto equidistante, bisector o midset. Nosotros preferiremos ladenominación de conjunto equidistante. No hay que buscar mucho, para darse cuenta que algunosde los objetos geométricos que suelen ser más conocidos, pueden ser vistos como este tipo deconjuntos. Así, una recta es el conjunto de puntos que está a la misma distancia de dos puntosdados, o bien, de dos conjuntos que no se intersectan donde uno es el reflejo de otro; las bisec-trices de dos rectas secantes es el conjunto de puntos a la misma distancia de estas dos rectasdadas; una parábola es el conjunto de puntos que está a la misma distancia de un punto dado (ofoco) y una recta; una rama de una hipérbola, es el conjunto equidistante de dos circunferenciasde radios distintos, o incluso de un punto y una circunferencia; por último, no es difícil verificarque el conjunto equidistante entre una circunferencia y un punto interior a ella es una elipse.
Dada la lista anterior de ejemplos se requiere recordar la definición de distancia punto-conjunto.Para un conjunto A ! X y un punto x " X, se define esta distancia como:
d(x, A) = ınf{!(x, a) | a " A}.
Dada esta noción es posible definir al conjunto equidistante entre dos conjuntos no vacíos A, B !X como
{A = B} := {x | d(x, A) = d(x, B)} .
Que es la notación que ocupa Wilker [1]. Esta misma, puede ser ocupada, salvo variaciones, pararepresentar dos conjuntos intimamente relacionados con el propio conjunto equidistante.
{A < B} = {x | d(x, A) < d(x, B)},{A # B} = {x | d(x, A) # d(x, B)}.
Además de la distancia antes nombrada, es necesaria una distancia conjunto-conjunto, la cual esconocida como distancia Hausdorff. Para un par de conjunto A, B ! X, se define esta distanciacomo:
dH(A, B) = max
!supa"A
d(a, B), supb"B
d(b, A)
"
2. Propiedades Topológicas
En lo que sigue, para cualquier tipo de distancia se ocupará la notación d(x, y) la cual adquirirásentido mediante los tipos de elementos que sean x e y. Excepto para la distancia Hausdorff, lacual se notará como dH.
3

Lo primero que se ha de notar es que a partir de la distancia se puede definir una funciónasociada a cada conjunto A $ X,
dA :X %&R
dA(x) '%&d(x, A)
Lema 2.1. dA es Lipschitz y, en particular, es continua.
Así, la distancia nos ayuda caracterizar a la clausura de un conjunto.
Lema 2.2. Sea A ! X.
Entonces A = {x | d(x, A) = 0}
Demostración. Supongamos que existe b " A tal que b (" {x | d(x, A) = 0}, por tanto, d(b, A) > 0.Luego, existe ", tal que d(b, A) > ".
Pero, b " A y, por tanto, ha de existir una sucesión {ak} ! A, tal que: akk&!%%& b. Y por tanto,
para " existe N tal que d(xk, b) < " para todo k > N. De lo que se tiene una contradicción, luegose tiene que A $ {x | d(x, A) = 0}.
Se ha de notar que d%1A ({0}) = {x | d(x, A) = 0}, y como {0} es cerrado, también lo es su
preimagen, dado que dA es continua. Además, A ! d%1A ({0}). Como A es el cerrado más chico
que contiene a A debe ocurrir que A $ d%1A ({0}).
Dado lo anterior se sigue claramente que:
Lema 2.3. d(x, A) = d(x, A)
Demostración. Como A ! A, se tiene que d(x, A) # d(x, A). Además, se tiene que:
d(x, A) # d(x, A) + dH(A, A)
donde d(A, A) = 0, ya que para todo a " A se tiene que d(a, A) = 0.
Y además,
Lema 2.4. {A = B} =#
A = B$
Demostración. Si x " {A = B}, por el Lema 2.3, se tiene que
d(x, A) = d(x, B)d(x, A) = d(x, B)
Luego, se tiene la igualdad de conjuntos, ya que el proceso inverso es análogo.
4
De lo anterior es claro que, se tiene que A ) B ! {A = B}
x " A * d(x, A) = 0x " B * d(x, B) = 0
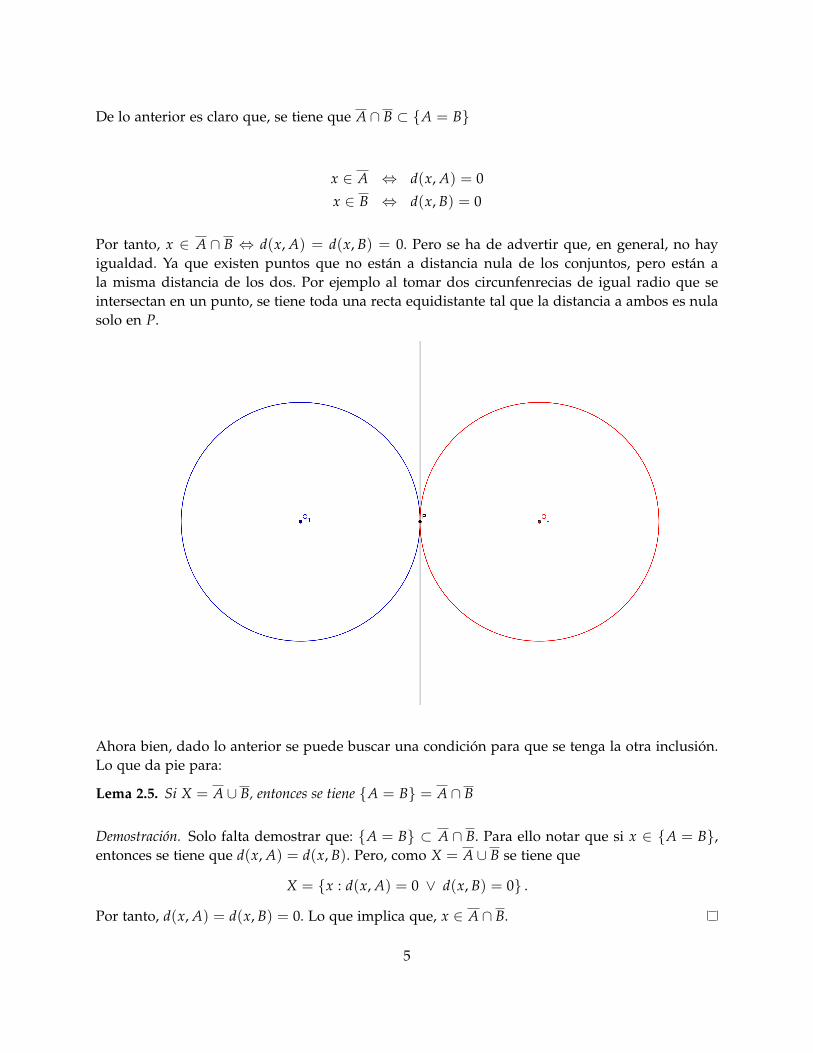
Por tanto, x " A ) B * d(x, A) = d(x, B) = 0. Pero se ha de advertir que, en general, no hayigualdad. Ya que existen puntos que no están a distancia nula de los conjuntos, pero están ala misma distancia de los dos. Por ejemplo al tomar dos circunfenrecias de igual radio que seintersectan en un punto, se tiene toda una recta equidistante tal que la distancia a ambos es nulasolo en P.
Ahora bien, dado lo anterior se puede buscar una condición para que se tenga la otra inclusión.Lo que da pie para:
Lema 2.5. Si X = A + B, entonces se tiene {A = B} = A ) B
Demostración. Solo falta demostrar que: {A = B} ! A ) B. Para ello notar que si x " {A = B},entonces se tiene que d(x, A) = d(x, B). Pero, como X = A + B se tiene que
X = {x : d(x, A) = 0 , d(x, B) = 0} .
Por tanto, d(x, A) = d(x, B) = 0. Lo que implica que, x " A ) B.
5

Dado lo anterior, si consideramos que X = A + B y A = B, se tiene que X = {A = B}. De dondees claro que X = A = B.
Si volvemos a observar la función distancia, se puede considerar combinar dos de estas funcionesy estudiar los conjuntos equidistantes a través de ellas.
f :X%&R
x '%&dA(x)% dB(x)
La cual, al ser resta de funciones continuas, es continua.
Lema 2.6. Dado f definida como antes, se tiene que {A = B} es cerrado, {A # B} es cerrado y {A < B}es abierto.
Demostración. Dado que f es continua, se tiene que al ser {0} cerrado y {A = B} su preimagen,este último es cerrado. Algo similar ocurre con {A # B}, dado que es preimagen de {(%!, 0]}es cerrado. Y {A < B} es abierto, ya que {(%!, 0)} lo es.
Con lo anterior, no es difícil ver que {A # B} = {A < B} + {A = B}.
La pregunta que naturalmente surge es si {A = B} resulta ser la frontera de {A < B}. Lo cualno es siempre verdad. Basta observar que cuando se tiene dos círculos del mismo radio intersec-tados en más de un punto, se consigue una región, la cual claramente es equidistante a ambosconjuntos y no todos los puntos de esta intersección se pueden considerar como puntos fronterade {A < B}.
6
Se ha de notar que cualquier cerrado es un conjunto equidistante. En particular, es el conjuntoequidistante del espacio en el que está contenido y el mismo. Para ello notar que: {A = X} =A ) X = A.
Teorema 2.1 (Wilker [1],Teorema 1). Sea (X,d) un espacio métrico.
X es conexo si y sólo si los conjuntos equidistantes son no vacíos.
Demostración. Supongamos que X no es conexo, por tanto existen C1, C2 cerrados disjuntos talesque C1 + C2 = X.
Ahora bien, por el Lema 2.5, se tiene que {C1 = C2} = C1 ) C2 = ". Lo cual contradice que unequidistante sea no vacío.
Por otro lado, supongamos que X es conexo.
Sean A, B ! X no vacíos. Luego, {A # B} es no vacío, ya que contiene por lo menos a A.
Por otro lado,
X = {A # B}% &' ((="
+ {B # A}% &' ((="
Como X es conexo, la intersección de ambos conjuntos cerrados debe ser no vacío. Y como hemosvisto antes, la intersección es {A = B}.
Si A (= " cerrado entonces
d(x, A) = d(x, a0) a0 " A
Ya que si d(x, A) = #,
B#+1(x) ) A = C
Donde C es un compacto, dado que es la intersección de dos cerrados, y uno de ellos es acotado.
Luego, d(x, A) = ınf {d(x, a) : a " C}, se logra como mínimo.
Un rayo es una semirecta cerrada la cual se denota por [a, !) donde a es el punto inicial, y se hadefinido anteriormente la dirección y sentido del mismo. Esta notación nos permite expandirlapara hablar de segmentos de este mismo rayo. Para ellos ocuparemos una notación similar a lade los intervalos en R.
Se ha de advertir que desde este punto, nos concentraremos en el caso de X = Rn.
7

Lema 2.7. Sea x " Rn y a " A tal que d(x, A) = d(x, a).
Para todo z " [a, x], la distancia se realiza en a, es decir d(z,A)=d(z,a).
Demostración. Supongamos lo contrario, por tanto, que existe un punto z para el cual la distanciaa A se realiza en a- (= a.
Como z, x y a son todos colineales:
d(x, a) = d(a, z) + d(z, x). d(a-, z) + d(z, x). d(a-, x)
Dado que d(x, a) era la menor distancia al conjunto A, se tiene que d(x, a) = d(x, a-). Por tanto,d(a-, z) + d(z, x) = d(a-, x). De lo que se tiene que:
d(a, z) + d(z, x) = d(a-, z) + d(z, x)d(a, z) = d(a-, z)
De lo que se concluye que la distancia también se realiza en a. Lo que contradice nuestra supo-sición inicial.
Si se tiene x " X y A ! X no vacío, se dice que y " X es un pie de x sobre A si d(x, A) = d(x, y), yademás y " A. Al conjunto de los pies de x sobre A lo denotamos PA(x). Este conjunto nunca esvacío (pues A es cerrado). En el caso particular en que A es convexo, se tiene que PA(x) consistede un solo punto para cada x " X.
Lo anterior, nos lleva a considerar el siguiente hecho.
Lema 2.8. Sea x " Rn y A ! Rn, tal que x (" A.
Para todo y en la bola abierta B(x, d(x, A)), la distancia se realiza en B(x, d(x, A))c.
Demostración. Supongamos lo contrario, por tanto existe algún punto y " B(x, d(x, A)) tal querealiza la distancia en y- " B(x, d(x, A)).
Por definición d(x, y-) < d(x, A). Pero, dado que las bolas son abiertas, y- (" A. Y no puedeocurrir que y- esté en el interior de la bola. Por tanto, está en su complemento.
Para reafirmar este hecho, se ha de notar que la situación en la siguiente imagen no podría ocurrirsi consideramos que p realiza su distancia en p- y que q realiza su distancia en q-.
8
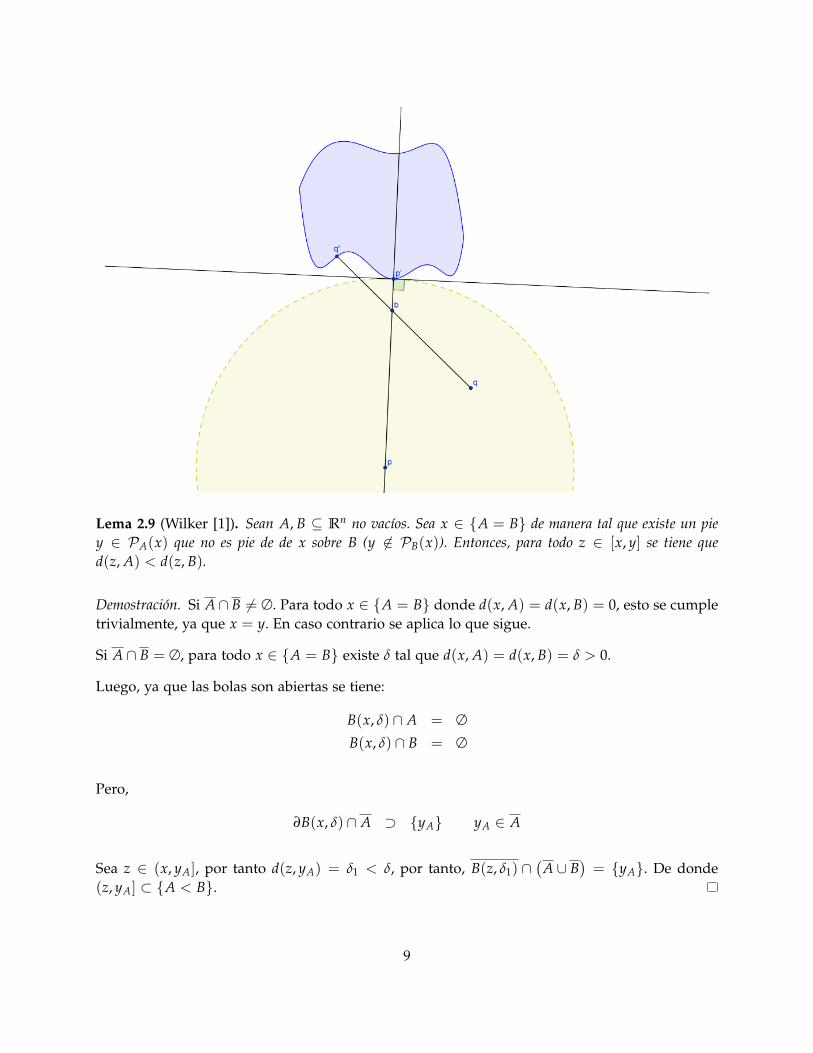
Lema 2.9 (Wilker [1]). Sean A, B $ Rn no vacíos. Sea x " {A = B} de manera tal que existe un piey " PA(x) que no es pie de de x sobre B (y (" PB(x)). Entonces, para todo z " [x, y] se tiene qued(z, A) < d(z, B).
Demostración. Si A ) B (= ". Para todo x " {A = B} donde d(x, A) = d(x, B) = 0, esto se cumpletrivialmente, ya que x = y. En caso contrario se aplica lo que sigue.
Si A ) B = ", para todo x " {A = B} existe # tal que d(x, A) = d(x, B) = # > 0.
Luego, ya que las bolas son abiertas se tiene:
B(x, #) ) A = "B(x, #) ) B = "
Pero,
$B(x, #) ) A / {yA} yA " A
Sea z " (x, yA], por tanto d(z, yA) = #1 < #, por tanto, B(z, #1) ))
A + B*= {yA}. De donde
(z, yA] ! {A < B}.
9

Teorema 2.2 (Wilker [1],Teorema 2). Si A y B son subconjuntos no vacíos de Rn, tal que A ) B = "entonces {A = B} tiene interior vacío y es la frontera entre {A < B} y {B < A}, es decir, $ {A < B} =$ {A > B} = {A = B}
Demostración. Sea x " {A = B}. Sobre este se puede ocupar el Lema 2.9, sobre yA " PA(x)obteniendo que para todo z " (x, yA] se tiene que (z, yA] ! {A < B}; y sobre yB " PB(x) seobtiene que para todo z " (x, yB] se tiene que (z, yB] ! {A > B}.
Luego, es claro que {A = B} tiene interior vacío, y es frontera de ambos conjuntos.
Teorema 2.3 (Wilker [1],Teorema 3). Si A = {a} y B un conjunto no vacío, se tiene que {A = B}es conexo o la unión de dos hiperplanos paralelos. El segundo caso ocurre si y sólo si a (" B y B es unsubconjunto de una recta L a través de a el cual intersecta a ambos rayos en los que a divide a L.
Demostración. Primero, notemos que el conjunto {{a} # B} es la intersección de semiespacioscerrados
{{a} # B} =+
b"B\{a}{{a} # {b}}
Lema 2.10 (Wilker [1],Lema 1). El conjunto {{a} # B} es convexo y entonces conexo.
Demostración. Como {{a} # B} es la intersección de conjuntos convexos, se tiene que es convexo.Y por tanto, como trabajamos en Rn es arcoconexo. Luego, es también conexo.
Dado lo anterior, podemos obtener el lema siguiente el cual nos permite caracterizar el equidis-tante si a " B.
Lema 2.11 (Wilker [1],Lema 2). Si a " B, {{a} = B} es conexo.
Demostración. Si a " B, claramente
d(x, B) # d(x, a) (1)
Así, {{a} = B} = {{a} # B}, ya que por definición se tiene {{a} = B} $ {{a} # B} y para todox " {B # {a}} ya que se cumple la Ecuación 1.
Luego, si x " {{a} # B} y x " {B # {a}}
* x " {{a} # B} ) {B # {a}}* x " {{a} = B}
De donde se consigue que {{a} # B} $ {{a} = B}. Por tanto, {{a} = B} = {{a} # B}.
Luego, por el Lema 2.10 se concluye la demostración.
10

De modo que, para lo que sigue se puede considerar que a (" B.
Sea %&r un rayo cerrado que parte en a y H(%&r ) el semiespacio abierto al cual a pertenece a suborde y %&r apunta hacia adentro en la dirección de la normal del semiespacio. Así, %&r intersectaal conjunto equidistante cuando H(%&r ) intersecta a B y en un sólo punto e(%&r ) (= a.
Debemos probar que si los rayos de a dan la topología de la esfera sobre a, luego el mapeo %&r %&e(%&r ) es continuo. Además que para dimensión n . 2 si cada recta a través de a interesectaal equidistante, se tiene que este conjunto de rectas resulta ser conexo. Por tanto, se tiene undominio conexo para una función continua. De lo que se desprende que el conjunto equidistantees conexo.
Lema 2.12 (Wilker [1],Lema 3). El mapeo %&r %& e(%&r ) es continuo.
Demostración. Sea %&r0 un rayo el cual se intersecta con el conjunto equidistante en e(%&r0 ).
Tomemos B(e(%&r0 ), "), tal que " < d(a, B)/2 y a (" B(e(%&r0 ), "). Recordemos que como a (" B,luego, la d(a, B) (= 0. Además, basta tomar estos casos de ", ya que para otros casos la bolapodría contener al punto a, en cuyo caso se toma una bola con estos requerimientos y el conjuntopreimagen encontrado respetará la condición necesaria para que la función sea continua.
A partir de a se puede tomar un cono tal que sea tangente a B(e(%&r0 ), "), el cual determinainmediatamente una serie de direcciones que podrían intersectar al conjunto equidistante. Peroesto todavía no nos asegura que el conjunto de direcciones escogido tenga como imagen puntosen la bola inicial.
Para asegurarnos de que los puntos queden totalmente dentro, tomemos una bola cerrada queesté totalmente contenida en {{a} < B}. Ahora bien, dado que {{a} # B} es convexo, contieneun cono de tangentes de e(%&r0 ) a esta bola. Y estas tangentes determinan una serie de direccionesen la bola inicial, las cuales intersectan al conjunto equidistante dentro de esta.
Lema 2.13 (Wilker [1],Lema 4). En dimensión n . 2, si cada línea que pasa a través de a intersecta alconjunto equidistante, luego el conjunto de todos los rayos con los cuales intersecta es conexo.
Demostración. Si los rayos %&r1 y %&r2 no intersectan al conjunto equidistante se han de intersectar enun ángulo 0 # % < &. Si %&r es un rayo en el ángulo %, luego como H(%&r ) ! H(%&r1 ) + H(%&r2 ), nopuede intersectar a B, y por tanto, %&r no se intersecta con el conjunto equidistante. Entonces, encualquier círculo grande los rayos los cuales no se intersectan con el conjunto equidistante caenen un arco, y los que si se intersectan con el conjunto equidistante completan el arco. Si %&r0 es unrayo fijo el cual intersecta al conjunto equidistante, entonces cualquier otro rayo que también lohaga puede ser unido con %&r0 por un gran arco circular de rayos del mismo tipo.
Por otro lado, si existe una linea L a través de a la cual no intersecta al conjunto equidistante,el conjunto B debe estar contenido en un plano E de dimensión (n % 1) en una perpendicular
11

a L. Así, el conjunto equidistante es un cilindro sobre {{a} = B} ) E y será conexo si y sólo sieste subconjunto del equidistante es conexo. Una elección inductiva de una sucesión de rectas yplanos ortogonales permiten conseguir la dimensión m . 2 cuando un conjunto equidistante co-nexo es garantizado por la argumentación antes hecha. Luego, {{a} = B} es un cilindro conexo.Por otro lado, la inducción permite probar que B es un subconjunto de una linea L1 a través dea. Luego, {{a} = B} es un hiperplano o una pareja de hiperplanos paralelos dependiendo si Bintersecta uno o dos de los rayos en los cuales L1 es divida por a.
Teorema 2.4 (Wilker [1],Teorema 4). En Rn si A y B son conjuntos conexos no vacíos, luego {A = B}es conexo.
Demostración.
Lema 2.14 (Wilker [1],Lema 5). Si A, B ! Rn son no vacíos, con A conexo, entonces {A # B} esconexo.
Demostración. Ya hemos visto que las distancias se realizan en la clausura de los conjuntos, portanto,
{A # B} =,
a"A
{{a} # B} (2)
Como A es conexo y {a} ! {{a} # B} ) A, A =-
a"A {a} está contenido en la unión de laEcuación 2. Y por tanto, Ua"A {{a} # B} es conexo.
Dado que cada uno de los conjuntos es conexo y contienen a A, la unión no es disjunta. De loque se concluye que {A = B} es conexo.
Lema 2.15 (Wilker [1],Lema 6). Si Rn = Y + Z donde Y y Z son no vacíos, abiertos y conexos, luegoY ) Z es conexo.
Lema 2.16 (Wilker [1],Lema 7). Sean A y B cerrados, no vacíos y conexos, tales ques que Rn = A + B,entonces A ) B es conexo.
Demostración. Supongamos lo contrario A ) B no es conexo. Por tanto, existen C1, C2 cerrados novacíos disjuntos tales que A ) B = C1 + C2.
Dado que Rn es normal, se puede separar tales cerrados por dos abiertos Ui. De forma queCi ! Ui con i " {1, 2}.
Tomemos
Vi =,
x"O!UiO abierto
x"Ci
O
12

de tal forma que Vi ! Ui.
Además, definamos V = V1 + V2. Con lo cual, se puede escribir Y = A + V y Z = B + V.
Se ha de notar que A ) B ! V y Bc = A \ (A ) B) dado que Rn = A + B. De lo que se concluyeque Y = Bc + V, por tanto, también es abierto. Ya que es la unión de dos abiertos: Bc, por sercomplemento de un cerrado; y V, por ser la unión de dos abiertos, por definición. Por otro lado,Y resulta ser conexo, dado que es A unido a un conjunto de abiertos que se intersectan con A.De forma análoga se concluye que Z es abierto y conexo.
Se ha de notar que
Y ) Z = (Ac + V) ) (Bc + V)
= (Ac ) Bc) + V= " + V= V
Y por el Lema 2.15, se tiene que V es conexo.
Pero V = V1 + V2 es la unión de dos conjuntos disjuntos abiertos. Lo cual contradice el hecho deser conexo. Luego, se completa la prueba.
Así, sabiendo que {A # B} + {B # A} = Rn junto con {A # B} ) {B # A} = {A = B}, seconcluye que {A = B} es conexo.
Dado el teorema anterior, lo lógico sería tratar de pensar si al tener dos conjuntos arcoconexos,su equidistante también lo es. Pero, no es verdad que si A y B son arcoconexos luego {A = B}es arcoconexo. Para ello se definen los conjuntos:
A = {(x, 1) : x . 0} +.(x, y) : x =
1n
,%1 +1n# y # 1, n = 1, 3, 5, . . .
/
B = {(x,%1) : x . 0} +.(x, y) : x =
1n
,%1 # y # 1n% 1, n = 2, 4, 6, . . .
/
Luego, {A = B} es el semiplano cerrado {(x, y) : x # 0} junto con una curva parecida al gráficode sin 1
x tal y como se muestra en la siguiente figura.
13
3. Comportamiento asintótico de los equidistantes
En esta sección trabajaremos sobre R2.
La envoltura convexa de un conjunto A es el menor convexo, que denotaremos ec(A), tal quecontiene al conjunto. Por tanto, es posible describirlo como
ec(A) =+
A!CC convexo
C
Se ha de notar que la envoltura convexa de un conjunto compacto es compacta, esto resulta comocorolario del Teorema de Caratheodory [[3], pág.184-185].
Una tangente T a un conjunto A es una recta tal que este último queda totalmente contenido enuno de los semiplanos que T determina y T ) A (= ". Al semiplano que contiene al conjunto lonotaremos por HT.
Además, es sabido que entre dos conjuntos compactos convexos disjuntos A, B existen sólo 4 tan-gentes a ambos conjuntos, dos de ellas interiores y dos exteriores. Donde las tangentes exterioresson aquellas tales que A ! HT y B ! HT, y las interiores, aquellas que A ! HT y B ! Hc
T.
14
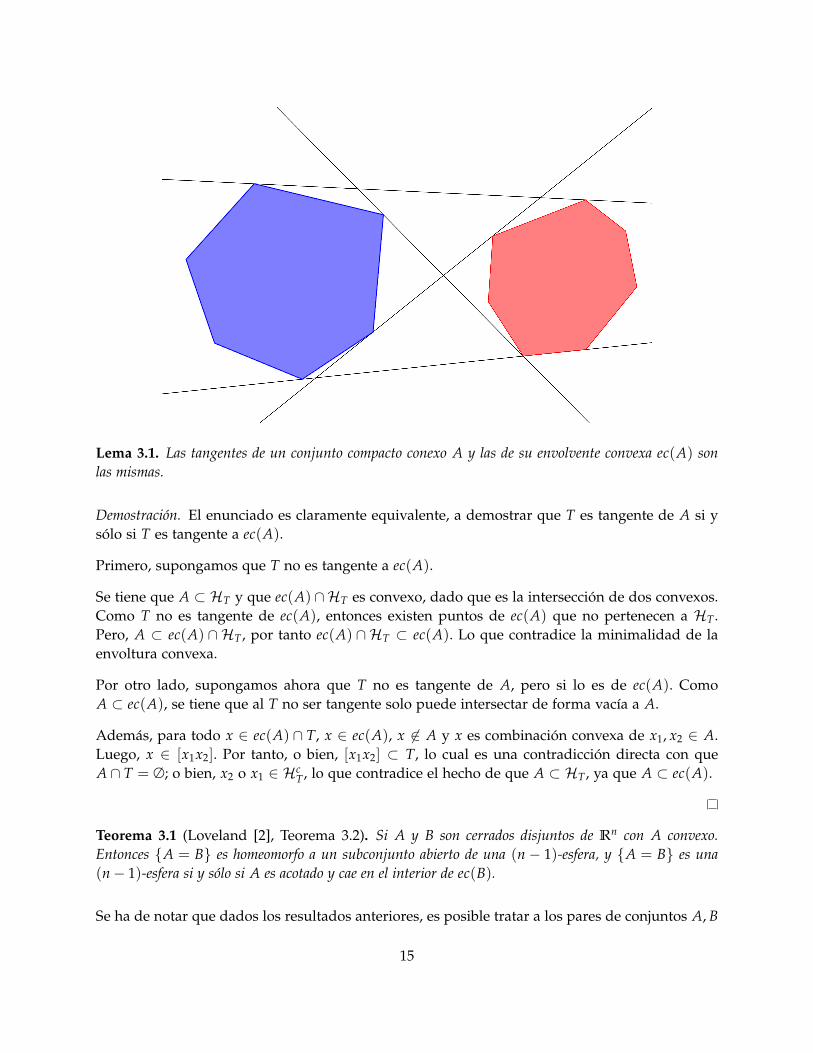
Lema 3.1. Las tangentes de un conjunto compacto conexo A y las de su envolvente convexa ec(A) sonlas mismas.
Demostración. El enunciado es claramente equivalente, a demostrar que T es tangente de A si ysólo si T es tangente a ec(A).
Primero, supongamos que T no es tangente a ec(A).
Se tiene que A ! HT y que ec(A) )HT es convexo, dado que es la intersección de dos convexos.Como T no es tangente de ec(A), entonces existen puntos de ec(A) que no pertenecen a HT.Pero, A ! ec(A) )HT, por tanto ec(A) )HT ! ec(A). Lo que contradice la minimalidad de laenvoltura convexa.
Por otro lado, supongamos ahora que T no es tangente de A, pero si lo es de ec(A). ComoA ! ec(A), se tiene que al T no ser tangente solo puede intersectar de forma vacía a A.
Además, para todo x " ec(A) ) T, x " ec(A), x (" A y x es combinación convexa de x1, x2 " A.Luego, x " [x1x2]. Por tanto, o bien, [x1x2] ! T, lo cual es una contradicción directa con queA ) T = "; o bien, x2 o x1 " Hc
T, lo que contradice el hecho de que A ! HT, ya que A ! ec(A).
Teorema 3.1 (Loveland [2], Teorema 3.2). Si A y B son cerrados disjuntos de Rn con A convexo.Entonces {A = B} es homeomorfo a un subconjunto abierto de una (n % 1)-esfera, y {A = B} es una(n % 1)-esfera si y sólo si A es acotado y cae en el interior de ec(B).
Se ha de notar que dados los resultados anteriores, es posible tratar a los pares de conjuntos A, B
15

donde uno está en el interior de la envoltura convexa del otro. Notando que esto implica que elconjunto equidistante está acotado en el interior del conjunto mayor por contención, y por tanto,está acotado.
Dada la notación de intervalos de los rayos se puede considerar un punto p (" B y parametrizarel segmento que determina con el punto donde realiza la distancia al conjunto B, o sea b. Estaparametrización queda definida como:
x :[0, d(p, B)]%&Rn
t '%& 1d(p, B)
((d(p, B)% t) p + bt)
Luego, esta función es claramente continua, ya que es una suma de funciones continuas. Portanto, al componer f con x, obtenemos una función continua.
Se ha de notar que, si suponemos que p está más cerca de A que de B, se tiene:
f (0) = d(p, B)% d(p, A) > 0f (d(p, B)) = d % d(b, A) < 0
donde d = d(b, B).
Ocupando el Teorema del Valor Intermedio, se tiene que existe un ' " [0, 1] tal que f (') = 0. Y
16

por tanto,00d(x' , A)% d(x' , B)
00 = 0d(x' , A) = d(x' , B)
de donde x' " {A = B}.
Se ha de notar que las tangentes logran separar el espacio en dos semiespacios, tal que uno deellos contiene al conjunto.
Dado que en Rn para un compacto es posible definir un cono de tangentes, se pueden separardos conjuntos vía estos conos. Así, si entre dos conjuntos los conos que estos determinan estánseparados por un ángulo (, entonces se dice que los conjuntos son separados.
En lo sucesivo se pretende estudiar conjuntos que son casi equidistantes. A estos conjuntos losllamaremos "% equidistantes. Y continuando con la notación ya introducida, serán:
{|A % B| < "} = {x : |d(x, A)% d(x, B)| < "}
Teorema 3.2. Sean A, B compactos. Si x0 " {|A % B| < "}, d(x0, A) < d(x0, B) y a partir de él A y Bestán separados por (, existe x " B(x0, t) tal que x " {A = B}. Donde
t = "12
" + 2d" + d % d cos (
y d = d(x0, A).
Demostración. Lo primero es notar que dado que x0 " {|A % B| < "} se tiene:
0 < f (x0) < "
Para la demostración necesitaremos hacer algunas construcciones auxiliares. La primera es es-tablecer los conos de tangentes que encierran nuestros conjuntos. Luego, se puede precisar aúnmás el lugar donde se encuentra el conjunto A, por la minimalidad de la distancia entre x0 y elconjunto A, se puede hacer un arco de circunferencia de radio d. De forma que en particular, seencuentra un punto a el cual es la intersección entre el arco y la tangente en la cual se mide elángulo (.
Por otro lado, en el segmento entre x0 y donde se realiza la distancia con B se define un punto.Este, dada la parametrización de este segmento se encuentra a distancia t de x0. Luego, se puedehacer un arco de circunferencia, con centro en x0 y radio t. De forma de marcar en la tangente enla cual se mide el ángulo ( esta distancia t, a este punto lo llamaremos t-.
17

Dado esto se logra un triángulo por estos puntos antes determinados, t- y a, y el punto p. Deforma que el ángulo ( es parte de este triángulo. El largo del lado definido entre el punto a y t-,puede ser calculado por el teorema del coseno, de forma que se obtiene:
s(t)2 = t2 + d2 % 2dt cos (
Considerando lo anterior, se tiene que s(t) # d(t, a). Y por tanto:
f (t) # d(x(t), B)% d(x(t), a)# d(p, B)% t % s(t)< d + " % t % s(t)
Con la última expresión se puede definir una función f (t) = d + " % t % s(t), la cual es continuapor ser suma de funciones continuas. Además, es diferenciable.
Analizando f se nota que:
18

f (0) = d + " % 0 %1
0 + d2 % 2d · 0 · cos (
= d + " % |d|= d + " % d= "
Así, f (0) = " = f (0). Lo cual es importante dado, que nuestra función f mayora en todo puntoa la función f y en 0 son iguales.
Ahora bien, lo que nos interesa es estudiar los ceros de f . Así, de manera indirecta, por lo dichoantes, estudiaremos los ceros de f (t).
d + " % t %1
t2 + d2 % 2dt cos ( = 0d + " % t =
1t2 + d2 % 2dt cos (
d2 + "2 + t2 % 2dt % 2t" + 2d" = t2 + d2 % 2dt cos (
2dt cos ( % 2dt % 2t" = %"2 % 2d"
t (2d cos ( % 2d % 2") = %)"2 + 2d"
*
t =12
"2 + 2d"
" + d % d cos (
Se ha de verificar que t pertenezca a nuestro intervalo de definición. Primero, veamos que espositivo. Para ello analizaremos el denominador (" + d % d cos () de la fracción que representa t,dado que el numerador es positivo por ser suma de elementos positivos (" y d).
cos ( # 1%1 # % cos (
%d # %d cos (
" + d % d # " + d % d cos (
0 < " # " + d % d cos (
Por tanto, se tiene que t es positivo.
Notemos que además la función f (t) es decreciente. Para ello observemos su derivada:
19

f -(t) =2
d + " % t %1
t2 + d2 % 2dt cos (3-
= %12
2t % 2d cos (0t2 + d2 % 2dt cos (
= %4
1 +t % d cos (0
t2 + d2 % 2dt cos (
5
La cual, por simple inspección es negativa cuando cos ( < 0. Por tanto, cuando ( ")
&2 , 3&
26. Por
otro lado, cuando ( "70, &
26+7 3&
2 , 2&6, basta con analizar el caso en que d cos ( > t; dado que
en otro caso la parte entre paréntesis será positiva, y por tanto, la función será decreciente.
Notemos que 2td cos ( # 2td, por tanto,
(d % t) # |t % d|
=8(t % d)2
=8|t2 % 2td + d2|
=1
t2 + d2 % 2tdd cos ( % t #
1t2 + d2 % 2td cos (
Donde el lado derecho es 0 solo cuando ( = 0 y t = d, pero este caso no lo estamos considerando,ya que los conjuntos no están separados.
%1 # % d cos ( % t0t2 + d2 % 2td cos (
0 # 1 +t % d cos (0
t2 + d2 % 2td cos (
De lo que se concluye que la función es no creciente.
Además, se ha de notar que el cero que hemos encontrado cumple que:
lım"&0
"
2" + 2d
" + d % d cos (= 0
Por tanto, podemos asegurar que para " suficientemente pequeños, se tiene una solución muycerca del "%equidistante.
20

El valor obtenido es posible aproximarlo por
t 1 "32
11 % cos (
Para lo que sigue es necesario que identifiquemos un rayo de otra forma. Este se puede ver como%&r =
#%&a + t%&v | t . 0,99%&v
99 = 1$
. Sea %&v 2 " R2 ortogonal a %&v con99%&v 299 = 1. Para " > 0 y un
vector inicial %&a definimos un tubo de ancho ", entorno a %&r como
Tub")%&r
*=
:%&a + t%&v + s%&v 2 | t . 0, |s| # ";
Decimos que {A = B} tiene una cola asintótica a %&r si existe " > 0 tal que el conjunto
C = {A = B} ) Tub")%&r
*
verifica que
a) La proyección ortogonal & : C & %&r es una biyección.
b) Si escribimos C con los parámetros (t, s) del tubo Tub")%&r
*el punto anterior asegura que
existe una función s : [0, !) & (%", ") tal que
C = {(t, s(t)) | t . 0}
con esta notación pedimos además que
lımt&!
s(t) = 0
Dada la definición anterior, se han de hacer los siguientes comentarios:
a) Notar que la función s definida arriba necesariamente es continua, pues su gráfico es cerra-do [[4]].
b) El lector habrá notado que para todo rayo %&p $ %&r el conjunto equidistante {A = B} tieneuna cola asintótica a %&p (por simple restricción de la cola correspondiente a %&r ). Si bien,uno puede formalizar definiendo una relación de equivalencia apropiada, en el resto deltexto consideraremos que estas dos colas son realmente la misma.
c) La segunda condición de definición la denominaremos comportamiento asintótico de la cola, ypor tanto, el rayo es una asíntota de la cola. Lo que difiere un poco del significado geométricousual de una asíntota, ya que permitimos que la cola intersecte al rayo de forma no vacía,pero en infinito el rayo y la cola están tan cerca que son indistinguibles.
21
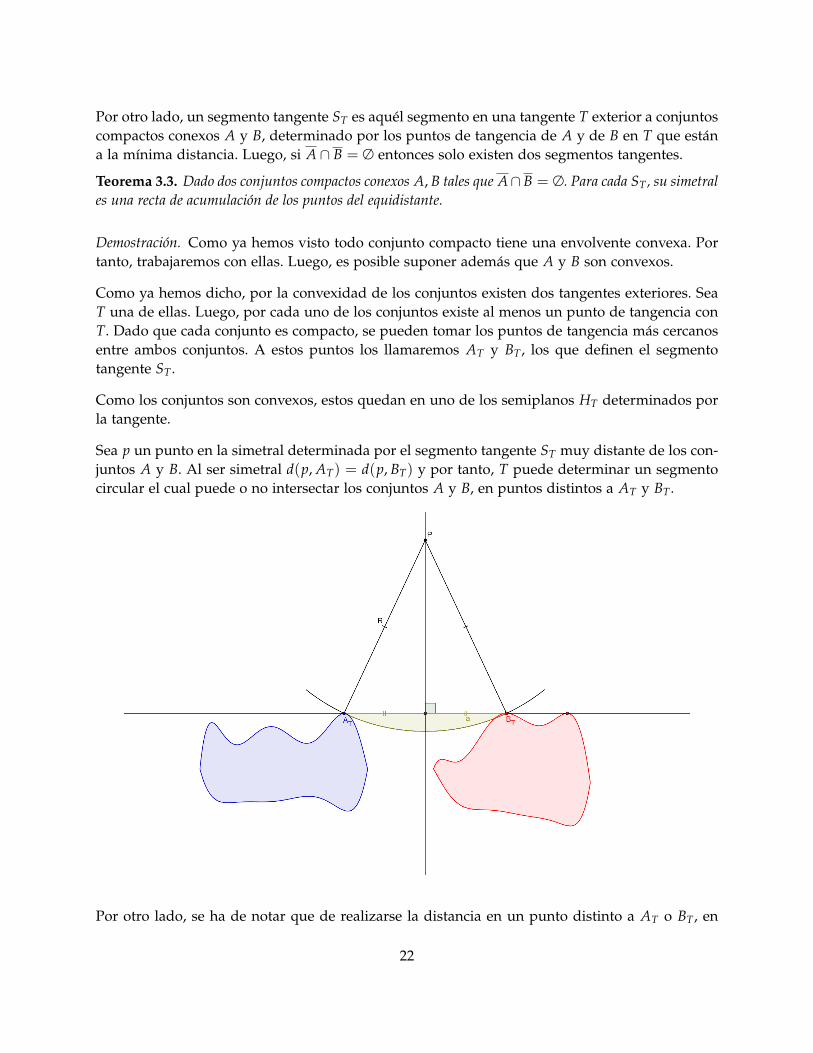
Por otro lado, un segmento tangente ST es aquél segmento en una tangente T exterior a conjuntoscompactos conexos A y B, determinado por los puntos de tangencia de A y de B en T que estána la mínima distancia. Luego, si A ) B = " entonces solo existen dos segmentos tangentes.
Teorema 3.3. Dado dos conjuntos compactos conexos A, B tales que A) B = ". Para cada ST, su simetrales una recta de acumulación de los puntos del equidistante.
Demostración. Como ya hemos visto todo conjunto compacto tiene una envolvente convexa. Portanto, trabajaremos con ellas. Luego, es posible suponer además que A y B son convexos.
Como ya hemos dicho, por la convexidad de los conjuntos existen dos tangentes exteriores. SeaT una de ellas. Luego, por cada uno de los conjuntos existe al menos un punto de tangencia conT. Dado que cada conjunto es compacto, se pueden tomar los puntos de tangencia más cercanosentre ambos conjuntos. A estos puntos los llamaremos AT y BT, los que definen el segmentotangente ST.
Como los conjuntos son convexos, estos quedan en uno de los semiplanos HT determinados porla tangente.
Sea p un punto en la simetral determinada por el segmento tangente ST muy distante de los con-juntos A y B. Al ser simetral d(p, AT) = d(p, BT) y por tanto, T puede determinar un segmentocircular el cual puede o no intersectar los conjuntos A y B, en puntos distintos a AT y BT.
Por otro lado, se ha de notar que de realizarse la distancia en un punto distinto a AT o BT, en
22
alguno de los los conjuntos. Se ha de realizar en el segmento circular. En el peor de lo casos se daque uno de los puntos es el extremo del radio del segmento circular y el otro punto en el pie dela simetral. Esa diferencia es calculable, teniendo en cuenta que la simetral determina el puntomedio del segmento [AT, BT], tal que esta distancia es 2a; y el largo de [p, AT] es R. De forma queresulta:
R %1
R2 % a2 %& 0, R & !
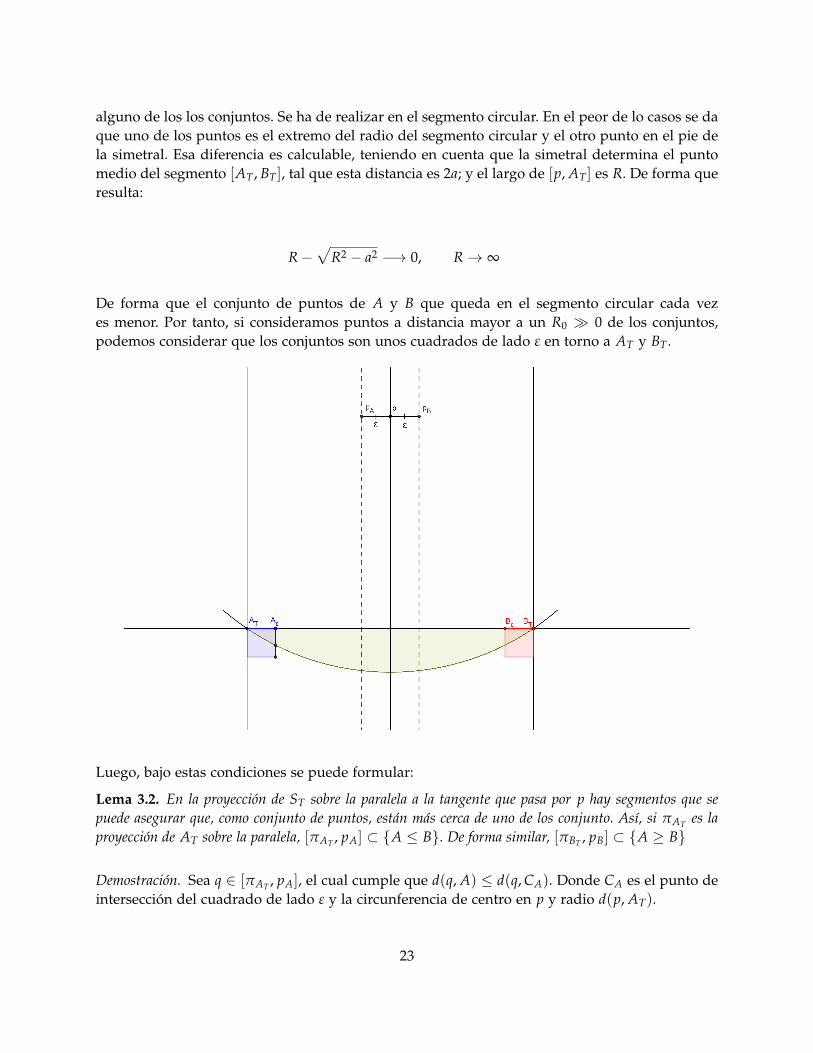
De forma que el conjunto de puntos de A y B que queda en el segmento circular cada vezes menor. Por tanto, si consideramos puntos a distancia mayor a un R0 3 0 de los conjuntos,podemos considerar que los conjuntos son unos cuadrados de lado " en torno a AT y BT.
Luego, bajo estas condiciones se puede formular:
Lema 3.2. En la proyección de ST sobre la paralela a la tangente que pasa por p hay segmentos que sepuede asegurar que, como conjunto de puntos, están más cerca de uno de los conjunto. Así, si &AT es laproyección de AT sobre la paralela, [&AT , pA] ! {A # B}. De forma similar, [&BT , pB] ! {A . B}
Demostración. Sea q " [&AT , pA], el cual cumple que d(q, A) # d(q, CA). Donde CA es el punto deintersección del cuadrado de lado " y la circunferencia de centro en p y radio d(p, AT).
23
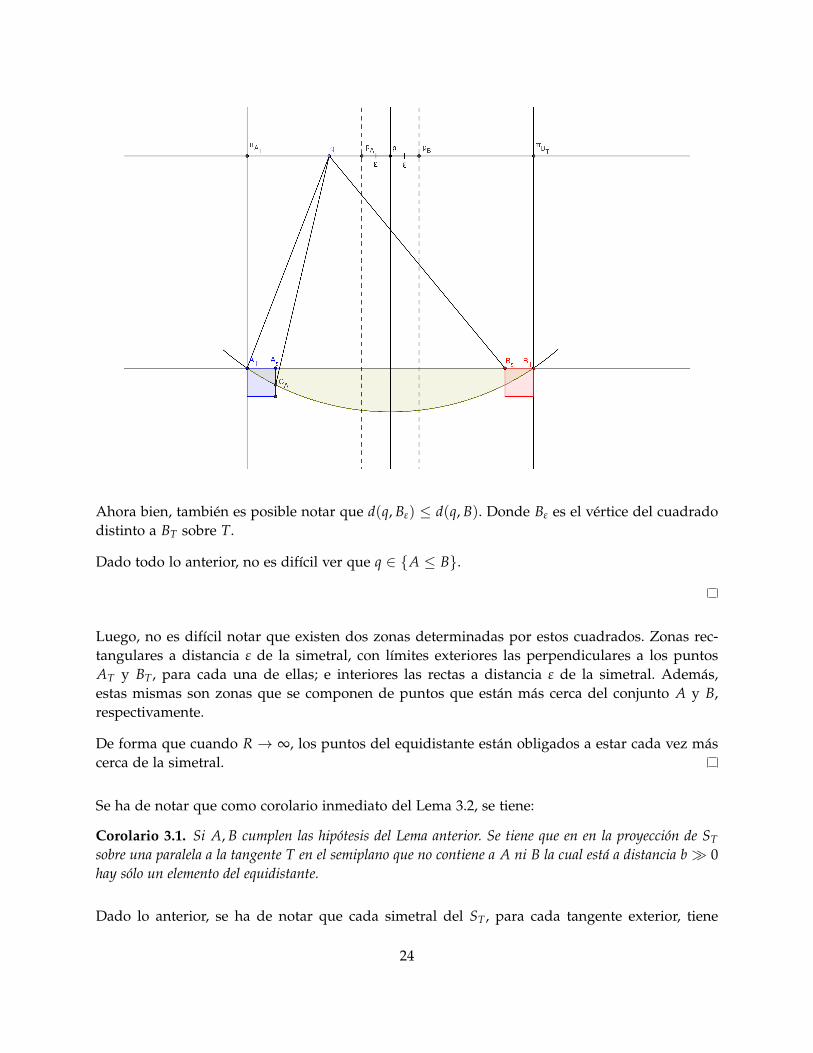
Ahora bien, también es posible notar que d(q, B") # d(q, B). Donde B" es el vértice del cuadradodistinto a BT sobre T.
Dado todo lo anterior, no es difícil ver que q " {A # B}.
Luego, no es difícil notar que existen dos zonas determinadas por estos cuadrados. Zonas rec-tangulares a distancia " de la simetral, con límites exteriores las perpendiculares a los puntosAT y BT, para cada una de ellas; e interiores las rectas a distancia " de la simetral. Además,estas mismas son zonas que se componen de puntos que están más cerca del conjunto A y B,respectivamente.
De forma que cuando R & !, los puntos del equidistante están obligados a estar cada vez máscerca de la simetral.
Se ha de notar que como corolario inmediato del Lema 3.2, se tiene:
Corolario 3.1. Si A, B cumplen las hipótesis del Lema anterior. Se tiene que en en la proyección de STsobre una paralela a la tangente T en el semiplano que no contiene a A ni B la cual está a distancia b 3 0hay sólo un elemento del equidistante.
Dado lo anterior, se ha de notar que cada simetral del ST, para cada tangente exterior, tiene
24
asociada una cola del equidistante.
Se define como Tub(ST) al subconjunto de puntos del semiplano, que determina el segmentotangente ST definido por AT " A y BT " B que no contiene ni A ni a B, tales que su proyecciónortogonal sobre T cae precisamente en ST.
Teorema 3.4. Dado dos conjuntos compactos conexos A, B tales que A ) B = ", su equidistante solotiene dos colas.
Demostración. Supongamos que no solo tiene dos colas, las cuales son determinadas por las si-metrales de los segmentos tangentes, y consideremos B(c, R) una bola tal que contiene a losconjuntos y R es considerablemente grande. Por tanto, como B(c, R) es compacta, se puede ex-traer otra dirección de acumulación de puntos equidistantes. Para ellos existe una recta l, a lacual se aproximan.
Si bien esta recta no necesariamente intersecta a los conjuntos, alguno de los semiplanos quedetermina intersecta con ellos. De forma que se puede elegir una perpendicular l2 a esta rectala cual sea tangente al menos a uno de los conjuntos, y por tanto, define un semiplano en el cualambos conjuntos están contenidos.
Si sólo es tangente a uno de los conjuntos, digamos a A, entonces B está estrictamente contenidoen el semiplano que determina l2. Por tanto, los puntos que se acumulan a l en realidad estánmás cerca de A que de B.
Si es tangente a ambos conjuntos, entonces ha de coincidir con T, una de las dos tangentesexteriores a los conjuntos. Por el Teorema 3.3, l no pertenece al TubST , ya que supusimos que l noera una de las simetrales. Por tanto, solo podría acumularse en una perpendicular a T fuera deTubST . Y este caso es fácil de descartar ya que estos puntos están más cerca de un conjunto quedel otro.
Se ha de observar que en el caso en que un conjunto está en la envoltura convexa del otro y quelas tangentes exteriores coinciden, también se cumple que sólo hay dos colas. Y éstas resultanser paralelas, ya que se aproximan a dos rectas que son perpendiculares a la misma tangenteexterior.
25
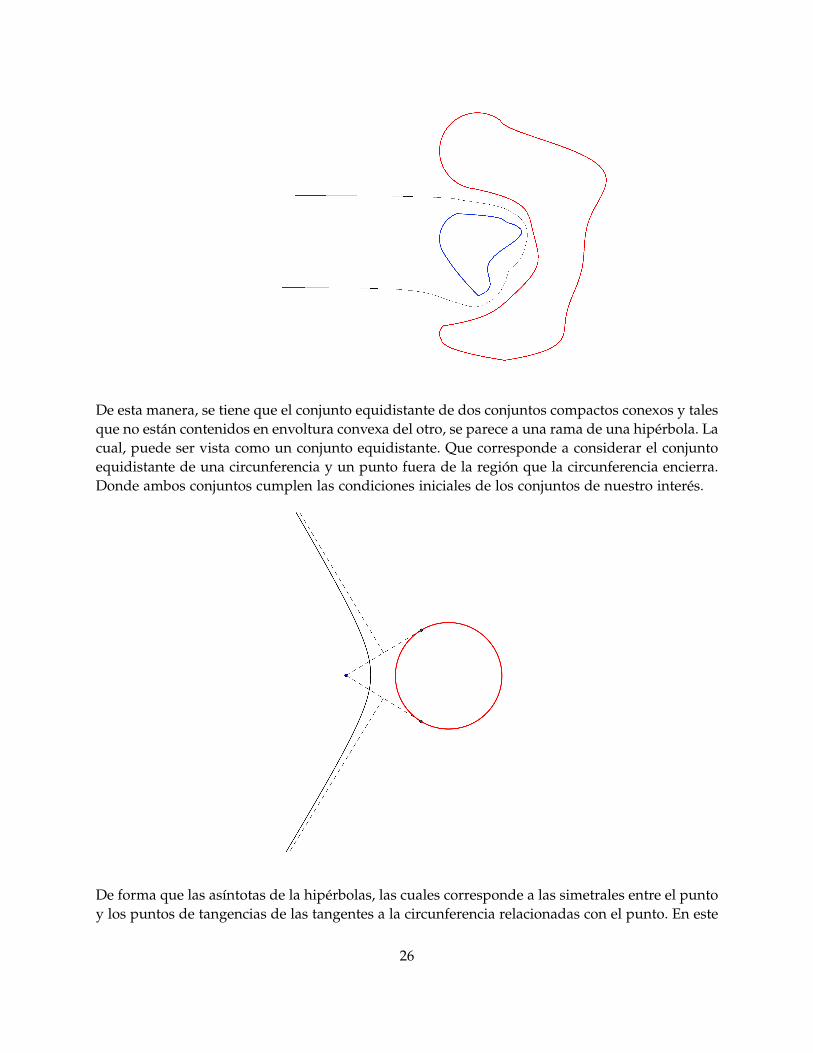
De esta manera, se tiene que el conjunto equidistante de dos conjuntos compactos conexos y talesque no están contenidos en envoltura convexa del otro, se parece a una rama de una hipérbola. Lacual, puede ser vista como un conjunto equidistante. Que corresponde a considerar el conjuntoequidistante de una circunferencia y un punto fuera de la región que la circunferencia encierra.Donde ambos conjuntos cumplen las condiciones iniciales de los conjuntos de nuestro interés.
De forma que las asíntotas de la hipérbolas, las cuales corresponde a las simetrales entre el puntoy los puntos de tangencias de las tangentes a la circunferencia relacionadas con el punto. En este
26

caso, la cola queda bien definida desde la intersección de la simetral con la tangente a la cualcorresponde. De forma que, los conjuntos equidistante de esta clase particular de conjuntos sepuede ver como una hipérbola generalizada.
4. Sucesiones
Teorema 4.1. Sean A, B compacto y sucesiones {An} y {Bn}, de conjuntos compactos y separados deB y A, respectivamente, que convergen Hausdorff a A y a B. Luego, {An = Bn} converge Hausdorff a{A = B}
Demostración. Tomemos x " {An = Bn}. Como AnH%& A, se tiene que para " existe un NA, tal
que para todo n > NA, dH(A, An) # ". De forma similar se consigue que, para todo n > NB,dH(B, Bn) # ". Por tanto, es posible tomar N = max {NA, NB} de forma que ambas desigualdadesserán verdad para n > N.
Utilizando que x " {An = Bn}, se tiene que d(x, Bn) = d(x, An). Y por tanto, para n > N:
d(x, A) # d(x, An) + dH(A, An)
# d(x, An) + "
= d(x, Bn) + "
# d(x, B) + dH(x, Bn) + "
# d(x, B) + 2"
d(x, A)% d(x, B) # 2" (3)
Por otro lado, por los mismos argumentos antes ocupados, se tiene:
d(x, B) # d(x, Bn) + "
= d(x, An) + "
# d(x, A) + 2"
= d(x, A) + 2"
%2" # d(x, A)% d(x, B) (4)
Luego, de (3) y (4), y un N apropiado se consigue
|d(x, A)% d(x, B)| < "
por tanto, x " {|A % B| < "}.
Luego, para todo x " {A = Bn} por Teorema 3.2, se tiene que para todo " existe un px," "{A = B}, que está a distancia tx,".
27

Además, si ahora se toma y " {A = B} y ", de forma que exista un N tal que para todo n > N,por un proceso similar al anterior se consigue que y " {|An % Bn| < "}. De forma que ocupando,nuevamente, el Teorema 3.2, se concluye que existe py," " {An = Bn}, que está a distancia ty,".
Se ha de recordar que tx,", ty," & 0, cuando " & 0. Luego, dH({A = B} , {An = Bn}) & 0.
5. Aplicación Computacional
A lo largo de este trabajo hemos ocupado para representar algunos conjuntos equidistantes, unaserie de dibujos realizados por un computador. Lo cual podría despertar cierta inquietud enaquellos que recuerden que un computador desgraciadamente no tiene memoria infinita, y portanto, la gran mayoría de los cálculos que este realice solo serán una aproximación de la realidad.Ya que claramente se tiene que ni lo conjuntos iniciales ni el conjunto equidistante resultante, sonexactamente los que deberían ser.
Es aquí donde el el Teorema 4.1 cobra fuerza, ya que nos asegura que a medida que podamos irmejorando la precisión de nuestros conjuntos iniciales podremos obtener una representación másfiel del conjunto equidistante que estos definen. Ya que lo que hacemos al aumentar los detallesde los conjuntos aumentando, por ejemplo, la resolución de nuestras imágenes, es conseguirconjuntos iniciales cada vez más parecidos al original. Y por tanto, logramos una representaciónmás fiel del conjunto equidistante de estos conjuntos.
Por otro lado, se ha de notar que en un plano, tanto la diferencia de distancia como el ángulo deseparación de los conjuntos desde cierto punto determinan regiones, en las cuales los puntos quepertenecen a ellas tienen una, o ambas, características semejantes. Esto nos permite considerarpor el grado de separación de los conjuntos y el Teorema 3.2, un valor para el error que seestá cometiendo al considerar un punto (un pixel) de tal región como equidistante. O visto deotro modo, decidir cual el error que deseamos conseguir en nuestra imagen final, considerandoque los conjuntos iniciales son prácticamente idénticos a los conjuntos que nos interesa estudiar.De forma que podamos elegir todos aquellos pixeles que cumplan con que la diferencia de lasdistancias a los conjuntos esté acotada por nuestro error.
Bibliografía
[1] Equidistant Sets and their Connectivity Properties, J. B. Wilker, Proceedings of the AmericanMathematical Society, Vol. 47, No. 2 (Feb., 1975), pp. 446-452
[2] When Midsets are Manifolds, L. D. Loveland, Proceedings of the American Mathematical So-ciety, Vol. 61, No. 2 (Dec., 1976), pp. 353-360
28

[3] Infinite Dimensional Analysis: A Hitchhiker’s Guide, Charalambos D. Aliprantis,Kim C. Bor-der,Springer, Third Edition
[4] Closed graph theorem: Topological approach, Piotrowski, Z.,Szymanski, A., Rendiconti del CircoloMatematico di Palermo,Vol.37,pp.88-99
29