clase n° 03-mecanica de sÓlidos ii-verano … · axial medidor de carga ... el esfuerzo y la...
TRANSCRIPT

UNIVERSIDAD NACIONAL DEL CALLAO
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
ESCUELA PROFESIONAL DE INGENIERÍA ELÉCTRICA
PROFESOR: ING. JORGE A. MONTAÑO PISFIL
CURSO: MECÁNICA DE SÓLIDOS II

CAPÍTULO 3:
CARGA AXIAL
Medidor de carga axial e implosión para Latas de 3 Piezas
CURSO DE MECÁNICA DE SÓLIDOS II

CAPÍTULO 3: CARGA AXIAL
3.1 PRINCIPIO DE SAINT-VENANTEstablece que la deformación y el esfuerzo localizados queocurren dentro de las regiones de aplicación de la carga o enlos soportes tienden a “emparejarse” a una distanciasuficientemente alejada de esas regiones.
3.2 DEFORMACIÓN ELÁSTICA DE UN MIEMBROCARGADO AXIALMENTEEl desplazamiento de un miembro cargado axialmente sedetermina relacionando la carga aplicada al esfuerzo usandoσ = P/A y relacionando el desplazamiento a la deformaciónunitaria usando ε = dδ/dx. Finalmente esas dos ecuacionesse combinan usando la ley de Hooke, σ = E ε, que da laecuación:
L
X
X
EAdxP
0)(
)(
P1 P2
X dX
L δ
P(x) P(x)
dx
dδ
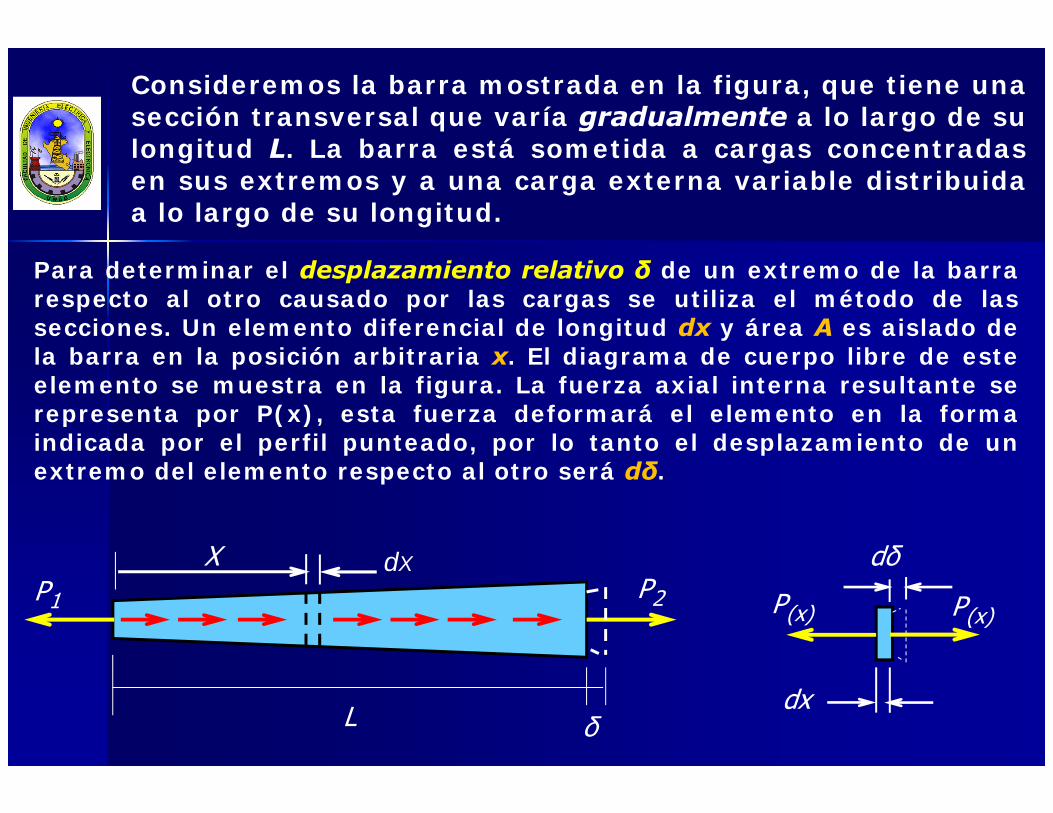
Consideremos la barra mostrada en la figura, que tiene unasección transversal que varía gradualmente a lo largo de sulongitud L. La barra está sometida a cargas concentradasen sus extremos y a una carga externa variable distribuidaa lo largo de su longitud.
Para determinar el desplazamiento relativo δ de un extremo de la barrarespecto al otro causado por las cargas se utiliza el método de lassecciones. Un elemento diferencial de longitud dx y área A es aislado dela barra en la posición arbitraria x. El diagrama de cuerpo libre de esteelemento se muestra en la figura. La fuerza axial interna resultante serepresenta por P(x), esta fuerza deformará el elemento en la formaindicada por el perfil punteado, por lo tanto el desplazamiento de unextremo del elemento respecto al otro será dδ.

dxdy
AP
x
x )(
)(
E
dxdE
AP
X
x
)(
)(
EAdxP
dx
x
)(
)(
El esfuerzo y la deformación unitaria en el elemento son:
Si estas cantidades no exceden el límite deproporcionalidad, podemos relacionarlas por medio de laley de Hooke, es decir,

Para la longitud entera L de la barra integramosla expresión anterior y hallamos que eldesplazamiento del extremo viene dado por:
L
X
X
EAdxP
0)(
)(
Donde:δ = desplazamiento de un punto de la barra relativo a otro punto.L = distancia entre los puntosP(x) = fuerza axial interna en la sección, localizado a unadistancia x de un extremo.A(x) = área de la sección transversal de la barra, expresadocomo función de x.E = módulo de elasticidad del material

EALP
P P
L
x
δ
Carga y área transversal constantes.- En muchoscasos la barra tendrá un área transversal A constante y elmaterial será homogéneo, por lo que E será constante.Además, si una fuerza externa constante se aplica a cadaextremo (ver la figura), entonces la fuerza interna P a lolargo de la barra será también constante. Por lo tanto δ sehalla por:

Si la barra está sometida a varias fuerzas axialesdiferentes, o si la sección transversal o el módulo deelasticidad cambian abruptamente de una región de labarra a la siguiente, la ecuación anterior puede aplicarse acada segmento de la barra donde esas cantidades seantodas constantes. El desplazamiento de un extremo de labarra respecto al otro se encuentra entonces por medio dela adición vectorial de los desplazamientos de los extremosde cada segmento. Para este caso general se cumple que:
EALP
Convención de signos.- Para aplicar la ecuación anteriorconsideraremos que la fuerza y el desplazamiento son positivos sicausan tensión y alargamiento, respectivamente, mientras queuna fuerza y un desplazamiento negativo causarán compresión ycontracción, respectivamente.
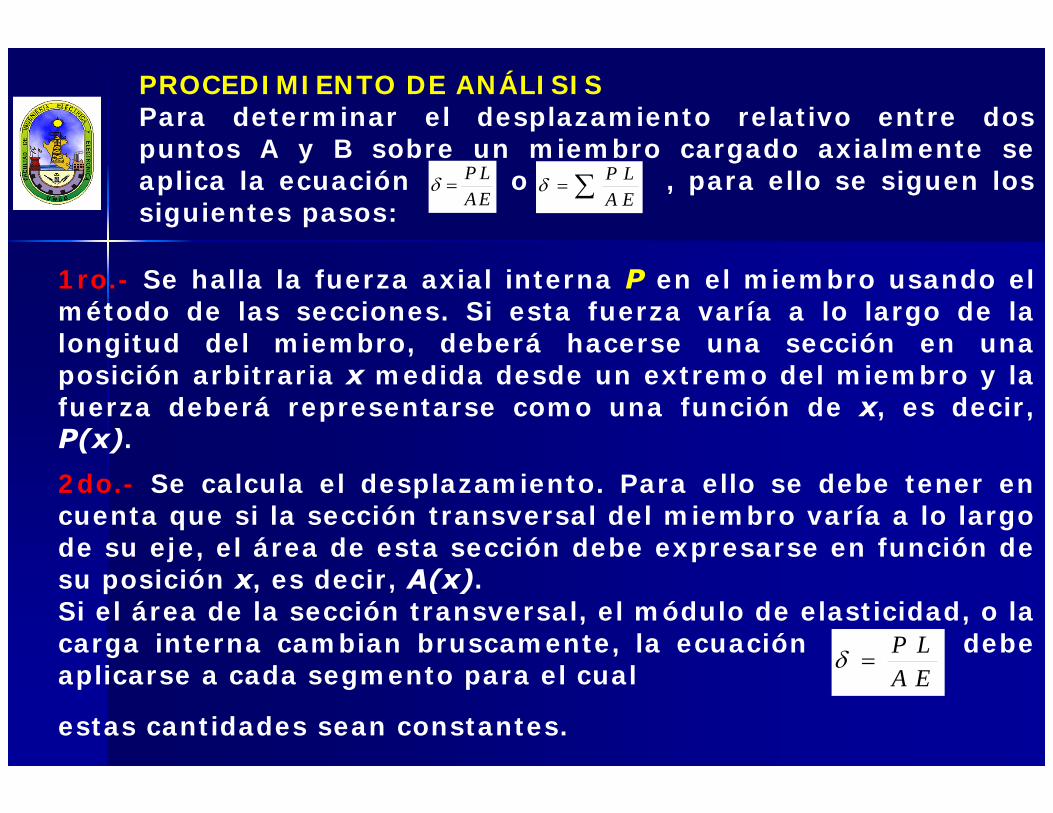
PROCEDIMIENTO DE ANÁLISISPara determinar el desplazamiento relativo entre dospuntos A y B sobre un miembro cargado axialmente seaplica la ecuación o , para ello se siguen lossiguientes pasos: EA
LP EALP
1ro.- Se halla la fuerza axial interna P en el miembro usando elmétodo de las secciones. Si esta fuerza varía a lo largo de lalongitud del miembro, deberá hacerse una sección en unaposición arbitraria x medida desde un extremo del miembro y lafuerza deberá representarse como una función de x, es decir,P(x).2do.- Se calcula el desplazamiento. Para ello se debe tener encuenta que si la sección transversal del miembro varía a lo largode su eje, el área de esta sección debe expresarse en función desu posición x, es decir, A(x).Si el área de la sección transversal, el módulo de elasticidad, o lacarga interna cambian bruscamente, la ecuación debeaplicarse a cada segmento para el cual
estas cantidades sean constantes.
EALP

3.3 PRINCIPIO DE SUPERPOSICIÓNEste principio se usa para simplificar los problemas deesfuerzo y desplazamiento que tienen cargas complicadas.Al subdividir la carga en componentes, el principio desuperposición establece que el esfuerzo o desplazamientoresultantes en el punto puede determinarse encontrandoprimero el esfuerzo o desplazamiento causado por cadacarga componente actuando independientemente sobre elmiembro. El esfuerzo o desplazamiento resultante sedetermina entonces sumando algebraicamente lascontribuciones causadas por cada componente.Las siguientes dos condiciones deben cumplirse para que elprincipio de superposición pueda aplicarse:
1. La carga debe estar relacionada linealmente con elesfuerzo o el desplazamiento que va a determinarse.2. La carga no debe cambiar significativamente lageometría original o configuración del miembro.
0 PFF AB
0/ BA
c
PL
LAC
LCB
A
B
FAFA
FB FB
FB
FA
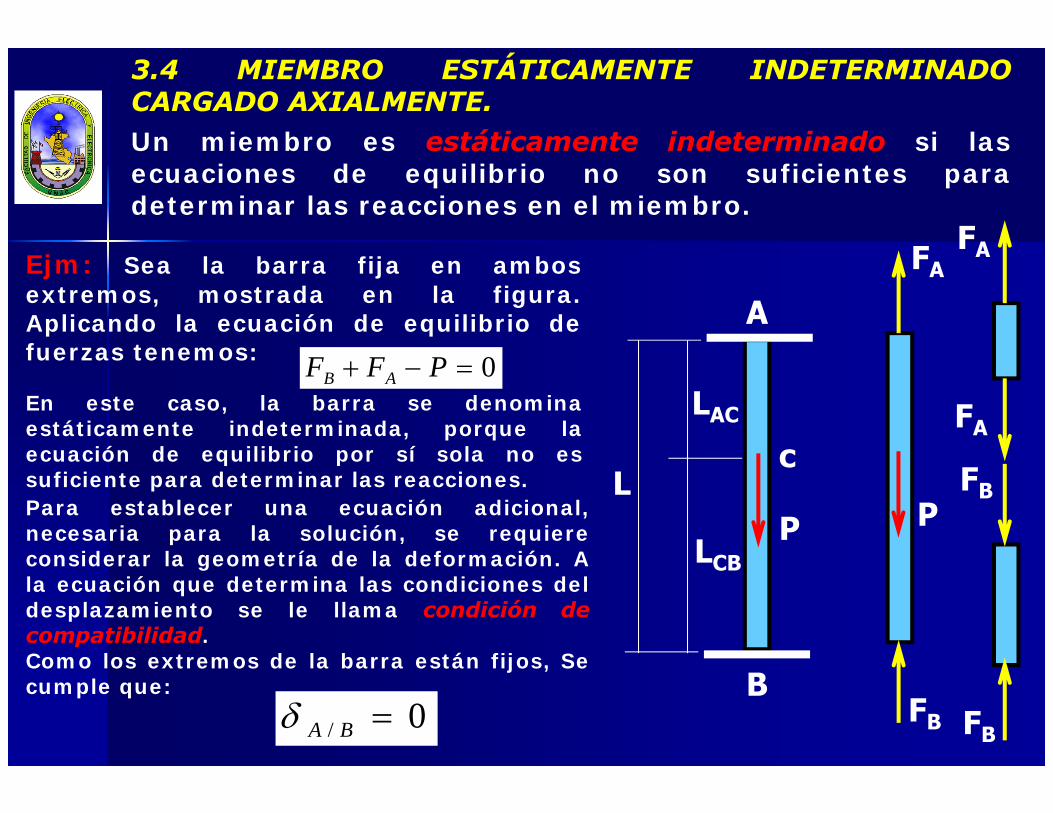
3.4 MIEMBRO ESTÁTICAMENTE INDETERMINADOCARGADO AXIALMENTE.Un miembro es estáticamente indeterminado si lasecuaciones de equilibrio no son suficientes paradeterminar las reacciones en el miembro.
Ejm: Sea la barra fija en ambosextremos, mostrada en la figura.Aplicando la ecuación de equilibrio defuerzas tenemos:
En este caso, la barra se denominaestáticamente indeterminada, porque laecuación de equilibrio por sí sola no essuficiente para determinar las reacciones.Para establecer una ecuación adicional,necesaria para la solución, se requiereconsiderar la geometría de la deformación. Ala ecuación que determina las condiciones deldesplazamiento se le llama condición decompatibilidad.Como los extremos de la barra están fijos, Secumple que:
P

LLPFy
LLPF AC
BCB
A
0EALF
EALF CBBACA
Esta ecuación puede expresarse en términos de las cargasaplicadas usando una relación carga-desplazamiento, quedepende del comportamiento del material. Por lo tanto, laecuación de compatibilidad puede escribirse como:
Suponiendo que AE es constante, podemos resolversimultáneamente las dos ecuaciones anteriores y obtener lossiguientes valores:
Ambos valores son positivos, por lo que las reacciones semuestran con sus sentidos correctos en el diagrama de cuerpolibre (ver la figura anterior).

3.5 MÉTODO DE LAS FUERZAS PARA EL ANÁLISIS DEMIEMBROS CARGADOS AXIALMENTE
El método de las fuerzas o método de las flexibilidadesconsiste en resolver los problemas estáticamenteindeterminados escribiendo la ecuación de compatibilidad yconsiderando la superposición de las fuerzas que actúansobre el diagrama de cuerpo libre.
Ejm: Sea la barra de la figura mostrada a continuación. Para escribir laecuación necesaria de compatibilidad, escogeremos primero cualquierade los dos soportes como “redundante” (el soporte no es necesario paramantener la barra en equilibrio estable, de manera que cuando se retira,la barra se vuelve estáticamente determinada) y retiraremostemporalmente su efecto sobre la barra. Si escogemos el soporte B comoredundante, usando el principio de superposición, la barra, con la cargaoriginal actuando sobre ella, es entonces equivalente a la barra sometidasólo a la carga externa, más la barra sometida sólo a la carga redundantedesconocida FB.

Si la carga P ocasiona que B se desplace hacia abajo una cantidadδP, la reacción FB debe ser capaz de desplazar el extremo B de labarra hacia arriba una cantidad δB, de manera que no ocurra ningúndesplazamiento en B cuando las dos cargas se superpongan. Secumple entonces que:
BP 0
cP L
LAC
LCB
A
B
P
A A
+
δBδP
FB
No hay desplazamiento de B
Desplazamiento de B al remover la fuerza redundante de B
Desplazamiento de B sólo al aplicar la fuerza redundante a B
=
Esta ecuación representa la ecuación de compatibilidad para los desplaza-mientos en el punto B, donde hemos supuestos que los desplazamientos sonpositivos hacia abajo.
EALF
EALP BAC 0
LLPF AC
B
0
PF
LLP A
AC
ACCB LLL
LLPF CB
A
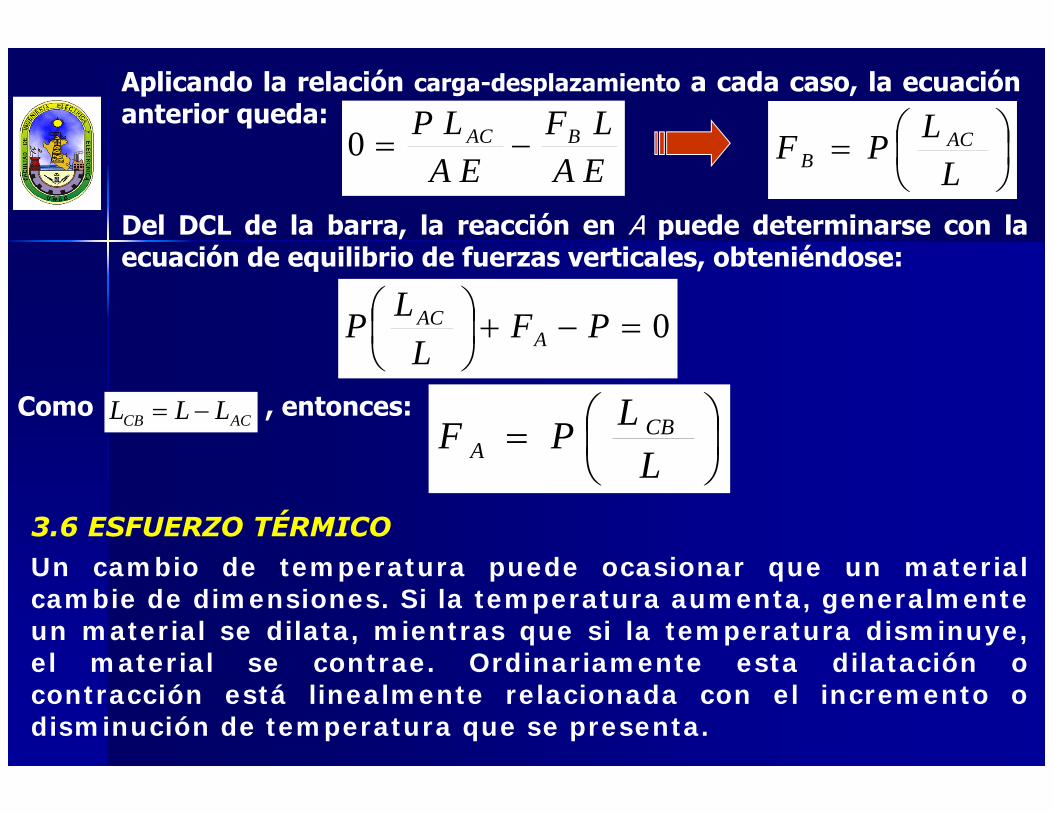
Aplicando la relación carga-desplazamiento a cada caso, la ecuaciónanterior queda:
Del DCL de la barra, la reacción en A puede determinarse con laecuación de equilibrio de fuerzas verticales, obteniéndose:
Como , entonces:
3.6 ESFUERZO TÉRMICOUn cambio de temperatura puede ocasionar que un materialcambie de dimensiones. Si la temperatura aumenta, generalmenteun material se dilata, mientras que si la temperatura disminuye,el material se contrae. Ordinariamente esta dilatación ocontracción está linealmente relacionada con el incremento odisminución de temperatura que se presenta.

LTT
Si este es el caso y el material es homogéneo e isotrópico,se ha encontrado experimentalmente que la deformación deun miembro de longitud L puede calcularse utilizando lafórmula:
Donde:
= propiedad del material llamada coeficiente lineal de dilatación térmica.
ΔT = cambio algebraico en la temperatura del miembro
L= longitud original del miembro
Δt = cambio algebraico en la longitud del miembro
Si el cambio de temperatura varía sobre toda la longitud del miembro, o si
varía a lo largo de la longitud, entonces la ecuación anterior es aplicablepara cada segmento de longitud dx. En este caso, el cambio en la longituddel miembro es:
L
dxT0