1-intro fisica-7(44)
TRANSCRIPT

9F ís ica
Unidad 1Conocimientos Generales
ANTECEDENTES
En el complejo proceso evolutivo del conocimiento, el hombresiempre ha buscado comprender los fenómenos naturales. Pocoa poco, al describirlos, clasificarlos e intentar manipularlos, na-ció lo que hoy conocemos como física y sus aplicaciones a latecnología.
La palabra física proviene del griego PHYSIKÉ que signifi-ca NATURALEZA, y es la ciencia que se encarga del estudiode la materia, la energía y las interacciones entre ambas.
Es muy vasto el mundo de la física, ya que abarca desde loinmensamente grande hasta lo infinitamente pequeño, pasandopor todas las cosas que observamos en nuestra vida cotidiana.
Respecto a lo muy grande, las primeras interrogantes se re-ferían al movimiento de los astros, cuya comprensión está ínti-mamente ligada a una mejor planeación de las labores agríco-las. Surgieron así las primeras teorías acerca del universo y sucomportamiento. De las primeras teorías geocéntricas se pasóa las heliocéntricas, basadas en las observaciones e investigacio-nes de científicos como Copérnico, Kepler, Galileo y Newton.Nuevas investigaciones establecieron que el Sistema Solar es

10 G U Í A PA R A E L E S T U D I A N T E
parte de una galaxia y que en el universo hay millones degalaxias que se alejan unas de otras.
En el terreno de lo pequeño, las primeras preguntas estabanrelacionadas con la estructura de la materia: ¿de qué están he-chas las cosas? También en este caso las teorías han ido evolu-cionando: de las primeras ideas acerca de los átomos deDemócrito, se ha llegado hasta las modernas teorías de partícu-las elementales regidas por las leyes de la mecánica cuántica.
Mientras el mundo gira, el universo se expande, y losprotones, neutrones y electrones se mueven aparentemente alazar, el hombre continúa creando, investigando e inventando.Sus descubrimientos sirven para facilitar y recrear su vida. Losdescubrimientos científicos y los inventos de la técnica se nutrenmutuamente. Así, por ejemplo, la comprensión de los fenóme-nos relacionados con la electricidad y el magnetismo ha permi-tido el desarrollo de aparatos útiles como el teléfono, el hornode microondas, los aparatos de rayos X, la televisión, entre otrosmuchos. Por otra parte, la invención de la máquina de vaporcondujo al estudio del calor y al nacimiento de toda una ramade la física; la termodinámica.
CLASIFICACIÓN DE LA FÍSICA
Para su estudio, la física se clasifica en clásica y moderna.
FÍSICA CLÁSICA: En general se afirma que la física clásica esla anterior a la mecánica cuántica. Algunos científicos incluyenla teoría de la relatividad dentro de la física clásica; para ellosla física clásica es toda la que no es cuántica; otros incluyen larelatividad dentro de la física moderna.
FÍSICA MODERNA: Se entiende por física moderna a la que sedesarrolló a partir del siglo XX. Sus dos principales áreas sonla relatividad de Einstein y la mecánica cuántica.
En este curso estudiaremos una parte de la física clásica, enparticular la mecánica clásica.
MEDICIONES Y ERRORES
La física está basada en teorías cuyas leyes intentan dar cuentade los fenómenos naturales.

11F ís ica
Para establecer o corroborar dichas leyes, es necesario me-dir diversas magnitudes como tiempos, distancias, masas, pesos,temperaturas, energías, voltajes, amperajes, etc. Recordemosque medir es comparar una magnitud con otra de la misma es-pecie.
La medición nunca es exacta; depende en forma determinan-te de los aparatos que empleamos para medir y de la forma enque los usamos. A la diferencia entre el valor medido y el valorreal de la magnitud la llamaremos error en la medición. Paraobtener el valor más preciso o aproximado debemos efectuarvarias mediciones y obtener el promedio de las mismas. Loserrores cometidos en una medición pueden ser de dos tipos: sis-temáticos y circunstanciales.
ERRORES SISTEMÁTICOSSiempre son constantes y aparecen debido a:• Instrumento defectuoso• Error de paralelaje• Mala calibración del instrumento• Error de escala
ERRORES CIRCUNSTANCIALESSe repiten de medición en medición y están causados por:• Humedad• Temperatura• Ambiente• Iluminación• Presión
Dependiendo de sus causas o de sus aplicaciones, debemosconsiderar diferentes tipos de errores:
ERROR ABSOLUTO ( EA )Se define como la diferencia entre la medición y el valor más
probable EA = M-Vp
ERROR RELATIVO ( ER)Se define como el cociente entre el error absoluto y el valor
más probable ER= EA/Vp

12 G U Í A PA R A E L E S T U D I A N T E
ERROR PORCENTUALSe define como el producto del error relativo por 100 EP= ER x 100
EJEMPLO:El equipo # 6 del grupo 301 del laboratorio de física I, mide
el diámetro de una esfera y obtiene los siguientes datos : 2.23 cm ,2.22 cm, 2.21 cm, 2.23 cm, 2.21 cm y 2.22 cm.
Calcular :A)El valor más probableB) El error absolutoC) El error relativoD)El error porcentual
Solución del problema:Lo primero que vamos a hacer es anotar los datos obtenidos
por el equipo para calcular lo que se nos pide.
DATOS:m1 = 2.23 cmm2 = 2.22 cmm3 = 2.21 cmm4 = 2.23 cmm5 = 2.21 cmm6 = 2.22 cm
En primer lugar calculamos el valor más probable como elpromedio de los datos:
Vp= (m1+m2+m3+m4+m5+m6 )/ 6 =
(2.23+2.22+2.21+2.23+2.21+2.22 )/6 = 13.32/6
Vp= 2.22 cm
Ahora vamos a calcular el error absoluto, que es la diferen-cia entre el valor medido y el valor más probable sin considerarel signo, pues únicamente nos interesa el tamaño de esta dife-rencia.
EA= M-Vp
13F ís ica
Para cada dato tenemos qué:
2.22 cm- 2.23 cm = 0.01 cm2.22 cm- 2.22 cm = 0.00 cm2.22 cm- 2.21 cm = 0.01 cm2.22 cm- 2.23 cm = 0.01 cm2.22 cm- 2.21 cm = 0.01 cm2.22 cm- 2.22 cm = 0.00 cm
El promedio de estos valores es:
0.04 cm/6 = 0.0066 cm
Calculemos ahora el error relativo:ER = EA/VpER = 0.0066 cm / 2.22 cmER= 0.0297
Por último vamos a calcular el error porcentual
EP = ER X 100 %EP = 0.0297 X 100 %EP = 2.97 %
Crea un problema como el anterior con tus compañeros declase. Midan el largo de una hoja, el largo del escritorio o el lar-go del salón y calculen: el valor más probable, el error absolu-to, el error relativo, y el error porcentual, y expliquen el signifi-cado de cada resultado.
Por último: no olvides que cuando tengas que “medir” debeshacerlo varias veces con el mismo instrumento y después sacarun promedio para obtener valor más aproximado al real. Al fi-nal de esta unidad encontrarás más problemas de este tipo.
SISTEMAS DE UNIDADES
Para medir una magnitud física es necesario establecer un pa-trón o unidad de comparación. En la historia de la humanidadse han establecido diferentes formas de medir las distintas mag-nitudes físicas, y se utilizaron en ocasiones las partes del cuer-po como los pies, las brazas, las pulgadas, etc. Cada civilizaciónmedía a su manera las magnitudes que les eran útiles. Cuando

14 G U Í A PA R A E L E S T U D I A N T E
los diferentes pueblos interactuaron con mayor frecuencia, seenfrentaron a los problemas emanados de la diferente manerade medir las cosas que había adoptado cada uno y se hizo nece-sario establecer convenios internacionales cada vez más ampliospara ponerse de acuerdo en las unidades de medición.
En el año de 1960 se reunieron en Suiza técnicos y científi-cos de varios países para actualizar el sistema de unidades adop-tado por todos ellos con el fin de permitir una comunicación yun comercio más eficientes. En esa reunión nació el SistemaInternacional de Unidades (SI). Este sistema tiene como baseel metro, el kilogramo y el segundo como unidades de longitud,masa y tiempo, respectivamente.
En la actualidad se siguen usando otros sistemas como el in-glés, el c.g.s , y el gravitacional.
El sistema internacional tiene 7 unidades básicas que son:
MAGNITUD NOMBRE SÍMBOLO
LONGITUD METRO mMASA KILOGRAMO kgTIEMPO SEGUNDO sTEMPERATURA KELVIN °kCANTIDAD DE SUSTANCIA MOL molINTENSIDAD LUMINOSA CANDELA cdINT. DE CORRIENTE ELECT. AMPERE A
Una UNIDAD es una base de comparación para medir. Lasunidades se pueden clasificar en
FUNDAMENTALES Y DERIVADASUna unidad fundamental es aquella que no se puede definir
ni expresar a partir de otras. Como ejemplo tenemos las ante-riores magnitudes básicas.
Una unidad derivada es aquella que se forma al combinardos o más fundamentales; por ejemplo, la unidad de velocidades m/s, la de volumen es el m3 y la de densidad es el g/cm3.
15F ís ica
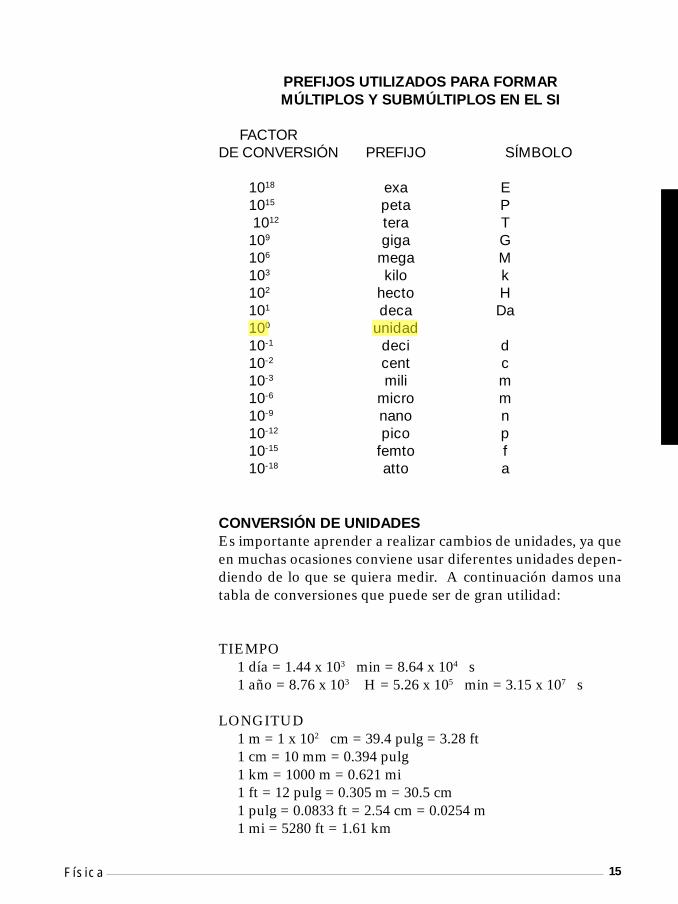
PREFIJOS UTILIZADOS PARA FORMARMÚLTIPLOS Y SUBMÚLTIPLOS EN EL SI
FACTORDE CONVERSIÓN PREFIJO SÍMBOLO
1018 exa E1015 peta P 1012 tera T109 giga G106 mega M103 kilo k102 hecto H101 deca Da100 unidad10-1 deci d10-2 cent c10-3 mili m10-6 micro m10-9 nano n10-12 pico p10-15 femto f10-18 atto a
CONVERSIÓN DE UNIDADESEs importante aprender a realizar cambios de unidades, ya queen muchas ocasiones conviene usar diferentes unidades depen-diendo de lo que se quiera medir. A continuación damos unatabla de conversiones que puede ser de gran utilidad:
TIEMPO1 día = 1.44 x 103 min = 8.64 x 104 s1 año = 8.76 x 103 H = 5.26 x 105 min = 3.15 x 107 s
LONGITUD1 m = 1 x 102 cm = 39.4 pulg = 3.28 ft1 cm = 10 mm = 0.394 pulg1 km = 1000 m = 0.621 mi1 ft = 12 pulg = 0.305 m = 30.5 cm1 pulg = 0.0833 ft = 2.54 cm = 0.0254 m1 mi = 5280 ft = 1.61 km

16 G U Í A PA R A E L E S T U D I A N T E
ÁREA1 m2 = 100 cm2 = 1.55 x 103 pulg2 = 10.76 ft2
1 cm2 = 10 m_ = 0.155 pulg2
1 ft2 = 1.44 pulg2 = 9.29 x 10-2 m2 = 929 cm2
VOLUMEN1 m3 = 103 dm3_= 106 cm3 = 35.3 ft3 = 6.10 x 104 pulg3
1 ft3 = 1728 pulg3 = 2.83 x 10-2 m3 =
MASA1 kg = 103 gr = 0.0685 slugs.
FUERZA1 N = 105 dinas = 0.225 lb =1 lb = 16 onzas = 4.45 N.
PRESIÓN1 Pa = 1 N/m2 = 2.09 x 10-2 lb/ft2
1 atm = 1.013 x 105 Pa = 14.7 lb/pulg2
ENERGÍA1 J = 0.738 ft . lb = 2.39 x 10 kcal.1 kcal = 1000 cal = 4185 J = 3097 BTU.
POTENCIA1 w = 1 J/s = 0.738 ft lb/s.1 kw = 1000 w = 1.34 Hp.1 Hp = 550 ft lb/s = 746 w.
PROBLEMAS
Realiza los siguientes cambios de unidades:
1. 88 km/h a m/s2. 110 km/min a m/s3. 143 m/s a km/s4. 120 mi/h a pies/s5. 160 mi/h a m/s6. 143 pulg. a cm7. 83 m a pies8. 648 lb a g
9. 9 m a cm

17F ís ica
10. 93 m a dm
11. 1,348 cm a pies
12. 681 cm a km
13. 916 pies a m
14. 310 km/h a m/s
15. 48 m/s a km/h
16. 318 pulg. a cm
17. 41.8 pie a m
18. 140 km/h a m/s
19. 161 pies a pulg.
20. 364 cm a Hm
21. 143 pulg. a cm
22. 83 m a pies
23. 648 lb a g
24. 90 km/h a m/s
25. 80 mi/h a pies/min
26. 19 Hm a cm
27. 9 yd. a cm
28. 351 km a mm
29. 43 mi/s a km/h
30. 1,493 pies a mi
MAGNITUDES ESCALARES Y VECTORIALES
Características de las magnitudes escalares y vectorialesAlgunos conceptos físicos, como la velocidad y la fuerza, requie-ren para quedar bien definidos de la especificación de su tama-ño y de su dirección. Para otras, como por ejemplo el tiempo yla temperatura, esto no es necesario; basta con saber su magni-tud. Por ello, las cantidades físicas se clasifican fundamental-mente en dos grupos: magnitudes escalares y magnitudesvectoriales.
a) Magnitudes escalares: son aquellas que quedan perfectamen-te determinadas por medio de un número y su unidad corres-

18 G U Í A PA R A E L E S T U D I A N T E
pondiente; por ejemplo, la longitud de una varilla se deter-mina completamente por su magnitud: 12 m
b) Magnitudes vectoriales: son aquellas que requieren de mag-nitud, dirección y sentido, para quedar completamente defi-nidas. Su representación matemática es el vector. Por ejem-plo, para que la velocidad de un automóvil que viaja de laciudad “A” a la ciudad “B” quede bien definida, es necesa-rio considerar que dicha velocidad es de 80 km/h en direccióneste - oeste. Por lo tanto, se tiene:
Magnitud de la velocidad: 80 km/hDirección: este - oesteSentido: de “A” a “B”
AB
80 km./h
M a g n i t u d
DirecciónSentido
x
FIGURA 1.1
Diferencia entre las magnitudes escalares y vectorialesLas magnitudes físicas escalares, como longitud, superficie, vo-lumen, masa, densidad, tiempo, temperatura, potencia, sonejemplos de magnitudes escalares.
En cambio velocidad, aceleración, fuerza, momento de unafuerza, momento angular, campo eléctrico, campo magnético,son magnitudes vectoriales.
Existe una diferencia fundamental entre las magnitudes físi-cas escalares y vectoriales: la manera de efectuar con ellas lasoperaciones de suma, resta y multiplicación o producto. Parasumar dos magnitudes escalares, se aplican las reglas del álge-bra, mientras que para sumar dos cantidades vectoriales, sedebe tomar en cuenta la magnitud, la dirección y el sentido decada vector, y debe usarse el álgebra vectorial.

19F ís ica
FIGURA 1.2
Características de un vectorUn vector es un segmento de recta dirigido que, dibujado a es-cala conveniente, representa a cierta cantidad vectorial.
Un vector se representa gráficamente por un segmento rec-tilíneo dirigido, con una punta de flecha en uno de los extremos.La longitud del vector AB se representa a una escala adecuaday corresponde a la magnitud del vector. Su dirección se especi-fica mediante el ángulo que forma el vector con la horizontal yla punta de flecha indica su sentido.
FIGURA 1.3

20 G U Í A PA R A E L E S T U D I A N T E
De acuerdo a las figuras, al punto “A” se le llama origen oinicio del vector mientras que al punto “B” se le llama extremodel vector, y la línea que une ambos puntos es una recta sobrela cual actúa.
Puesto que los vectores difieren de los escalares, para distinguira los vectores se les denota en forma especial; existen varios ti-pos de notación:
1. Con una letra mayúscula y una tilde encima.
A B C D
2. Con dos letras mayúsculas y una tilde encima.
AB CD EF GH
La primera letra corresponde al origen del vector y la segun-da a su extremo.
La dirección se puede indicar por el ángulo que forma el vectorcon un cierto eje de referencia. Por conveniencia se utiliza uneje horizontal, el eje “X”, como se muestra en la figura. A estetipo de representación se le llama representación geométrica deun vector.
FIGURA 1.4
Notación de un vector
Dirección de un vector
21F ís ica
El ángulo q se mide en la forma usual, es decir en sentidocontrario al movimiento de las manecillas del reloj, usando untransportador.
Para representar gráficamente un vector necesitamos una esca-la convencional, la cual establecemos según nuestras necesida-des, de acuerdo con la magnitud del vector y el tamaño que lequeramos dar. Si queremos representar un vector en una cuar-tilla no usaremos la misma escala que si lo hacemos en una hojade nuestro cuaderno.
Por ejemplo, si se desea representar en la cuartilla unvector fuerza de 350 N, dirección horizontal y sentido posi-tivo, podemos usar una escala de 1 cm igual a 10N: Así, consólo medir y trazar una línea de 35 cm el vector estará repre-sentado. Pero en nuestro cuaderno esta escala sería muygrande; lo recomendable es una escala de 1 cm = 100 N paraque el vector mida 3.5 cm.
Para representar gráficamente un vector es necesario tenera la mano una regla graduada y un transportador, para medirlongitudes y ángulos.
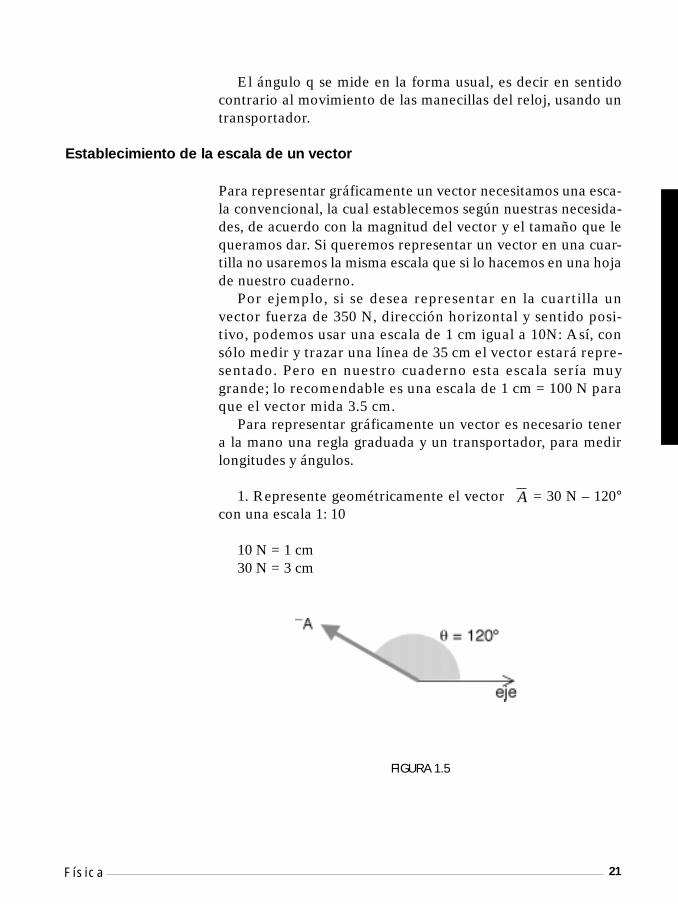
1. Represente geométricamente el vector A = 30 N – 120°con una escala 1: 10
10 N = 1 cm30 N = 3 cm
FIGURA 1.5
Establecimiento de la escala de un vector
22 G U Í A PA R A E L E S T U D I A N T E
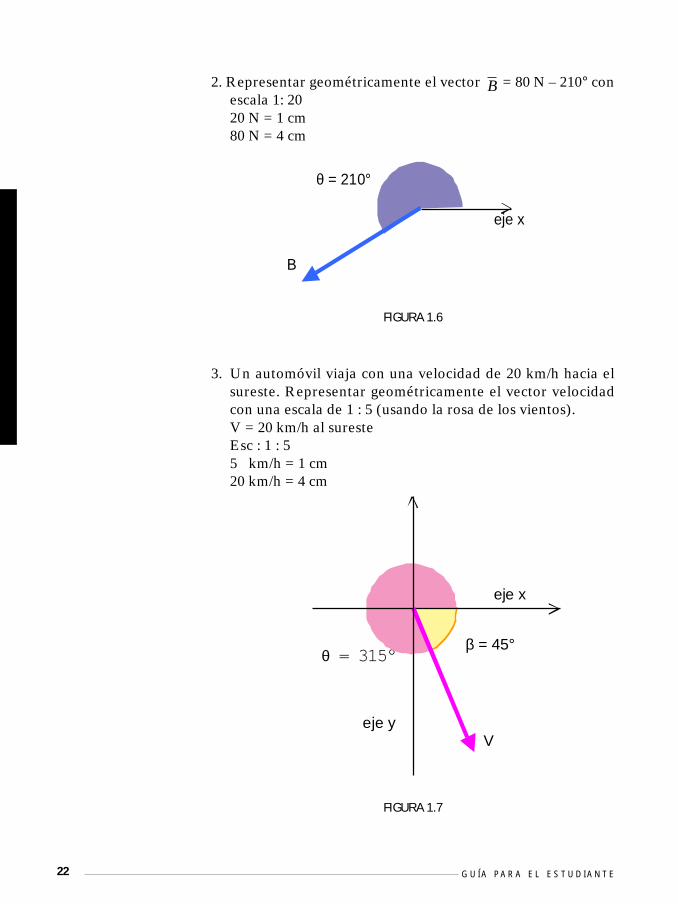
2. Representar geométricamente el vector B = 80 N – 210° conescala 1: 2020 N = 1 cm80 N = 4 cm
FIGURA 1.6
3. Un automóvil viaja con una velocidad de 20 km/h hacia elsureste. Representar geométricamente el vector velocidadcon una escala de 1 : 5 (usando la rosa de los vientos).V = 20 km/h al suresteEsc : 1 : 55 km/h = 1 cm20 km/h = 4 cm
FIGURA 1.7
B
θ = 210°
eje x
V
θ = 315°
eje x
eje y
β = 45°
23F ís ica
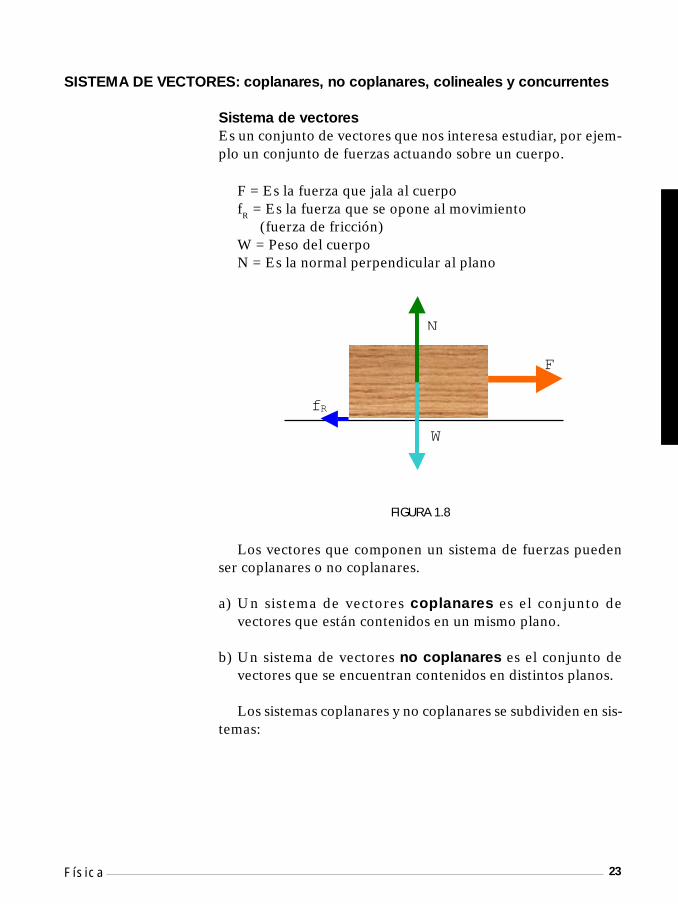
Sistema de vectoresEs un conjunto de vectores que nos interesa estudiar, por ejem-plo un conjunto de fuerzas actuando sobre un cuerpo.
F = Es la fuerza que jala al cuerpofR = Es la fuerza que se opone al movimiento (fuerza de fricción)W = Peso del cuerpoN = Es la normal perpendicular al plano
FIGURA 1.8
Los vectores que componen un sistema de fuerzas puedenser coplanares o no coplanares.
a) Un sistema de vectores coplanares es el conjunto devectores que están contenidos en un mismo plano.
b) Un sistema de vectores no coplanares es el conjunto devectores que se encuentran contenidos en distintos planos.
Los sistemas coplanares y no coplanares se subdividen en sis-temas:
SISTEMA DE VECTORES: coplanares, no coplanares, colineales y concurrentes
N
W
F
f R

24 G U Í A PA R A E L E S T U D I A N T E
• Colineales, donde los vectores del sistema están sobre una mis-ma línea de acción, como se muestra en la siguiente figura:
FIGURA 1.9
• Paralelos, donde los vectores del sistema están sobre líneasde acción paralelas entre sí.
FIGURA 1.10
• Concurrentes, donde las líneas de acción de todos losvectores del sistema concurren en un punto.
FIGURA 1.11
V1 V2
V1 V2 V3 V4
V1 V2 V3
V4 V5 V6
25F ís ica
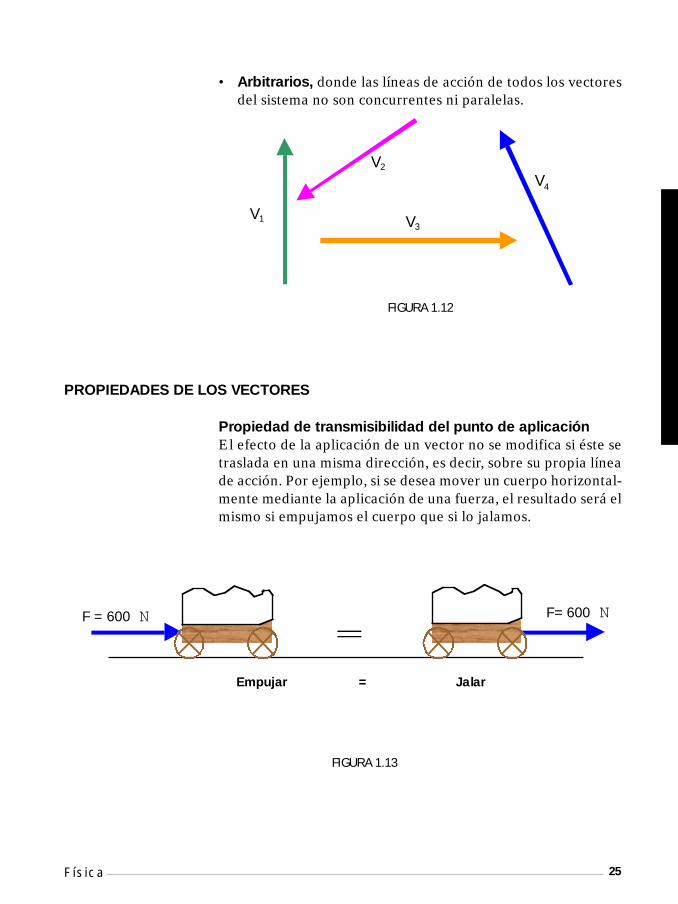
• Arbitrarios, donde las líneas de acción de todos los vectoresdel sistema no son concurrentes ni paralelas.
FIGURA 1.12
PROPIEDADES DE LOS VECTORES
V1
V2
V3
V4
Propiedad de transmisibilidad del punto de aplicaciónEl efecto de la aplicación de un vector no se modifica si éste setraslada en una misma dirección, es decir, sobre su propia líneade acción. Por ejemplo, si se desea mover un cuerpo horizontal-mente mediante la aplicación de una fuerza, el resultado será elmismo si empujamos el cuerpo que si lo jalamos.
FIGURA 1.13
Empujar = Jalar
F = 600 N F= 600 N

26 G U Í A PA R A E L E S T U D I A N T E
Propiedades de los vectores libresLos vectores no se modifican si se trasladan paralelamente a símismos. Esta propiedad la utilizaremos al sumar vectores porlos métodos gráficos del paralelogramo, el triángulo y el polígo-no que se estudiaran más adelante.
FIGURA 1.14
Sumamos el primer vector más el segundo vector.
FIGURA 1.15
Sumamos el segundo vector más el primer vector.
40°
F2 = 30 N
F1 = 40 N
40°
F2 = 30 N
F1 = 40 N
40°
F2 = 30 N
F1 = 40 N

27F ís ica
Las operaciones que se realizan con los vectores se hacen si-guiendo métodos de composición y descomposición de vectores,en los que se utilizan las reglas de la geometría, de la trigono-metría y del álgebra.
Composición de cantidades vectorialesCuando un sistema dado de vectores coplanares se sustituye porotro sistema del mismo tipo, con un número menor de vectores,pero que producen los mismos efectos que en el sistema origi-nal, se dice que se ha empleado el método de composición.
Descomposición de cantidades vectorialesCuando a un sistema dado de vectores se le sustituye por otrosistema del mismo tipo, con un número mayor de vectores, pro-duciendo el mismo efecto que el sistema original, se dice que seha empleado el método de descomposición.
Los vectores se pueden sumar, restar y multiplicar: la suma yla resta o diferencia sólo se puede efectuar con vectores de lamisma especie, mientras que la multiplicación o producto sepuede efectuar con vectores de diferente especie.
Suma y resta de vectores, método gráfico y analíticoLa suma de dos o más vectores de la misma especie da comoresultado otro vector, al cual se le llama vector suma o vectorresultante, y se le suele denotar con la letra R La resultantetiene la propiedad de producir el mismo efecto que el sistemade vectores que lo originó.
La resultante de dos vectores A y B se define como la dia-gonal del paralelogramo generado por A y B como se mues-tra en la figura; esta definición se conoce como la ley delparalelogramo.
FIGURA 1.16
OPERACIONES CON VECTORES
B R A
Vector resultante.
R = A + B

28 G U Í A PA R A E L E S T U D I A N T E
La resultante es el sistema más simple a que puede ser re-ducido un sistema dado de vectores, produciendo los mismoefectos.
Existen dos procedimientos
para efectuar la suma de
vectores
Son los que permiten determi-
nar la suma o resultante con
ayuda de la trigonometría
a) Método analítico del
triángulo o ley de senos y
cosenos
b) Método analítico de
componentes rectangulares
II.- Métodos analíticos
I.- Métodos gráficos
Para utilizar estos métodos es
necesario contar con un juego
de geometría completo, regla
graduada, transportador y
lápices de colores
a) Método gráfico del
paralelogramo
b) Método gráfico del
triángulo
c) Método gráfico del polígono
Para sumar dos vectores por este método, se procede de lamanera siguiente:
1. Se grafican los vectores a la misma escala, de tal manera queel extremo de uno coincida con el origen del otro, como semuestra en la figura b.
a) Método gráfico del triángulo
29F ís ica
FIGURA 1.17
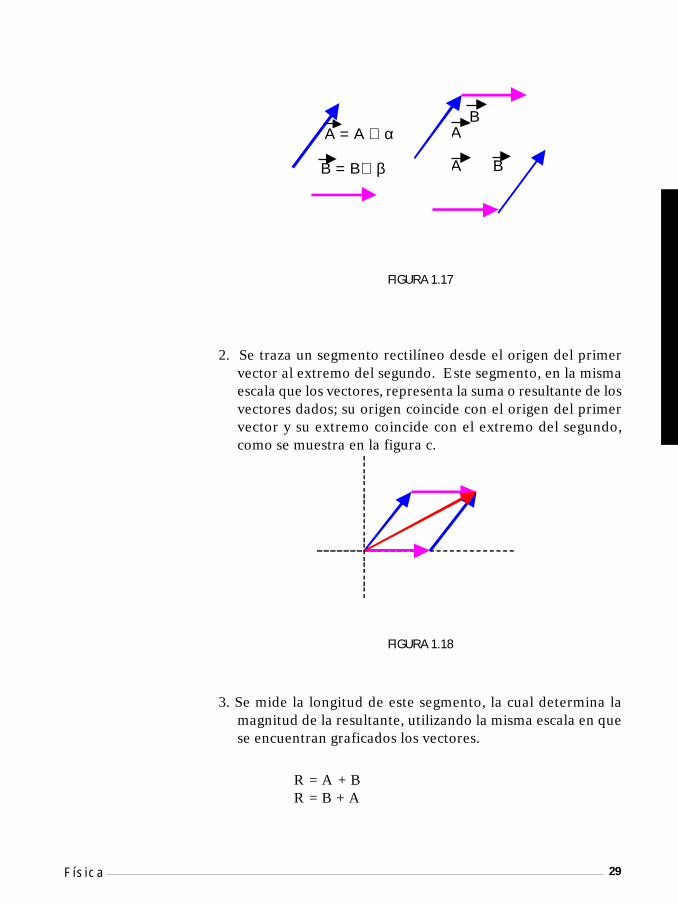
2. Se traza un segmento rectilíneo desde el origen del primervector al extremo del segundo. Este segmento, en la mismaescala que los vectores, representa la suma o resultante de losvectores dados; su origen coincide con el origen del primervector y su extremo coincide con el extremo del segundo,como se muestra en la figura c.
FIGURA 1.18
3. Se mide la longitud de este segmento, la cual determina lamagnitud de la resultante, utilizando la misma escala en quese encuentran graficados los vectores.
R = A + BR = B + A
A = A ∠ α
B = B∠ β
BA
A B

30 G U Í A PA R A E L E S T U D I A N T E
4. Se mide el ángulo de la resultante.
R = R∠ θ
• Hallar la resultante del siguiente sistema de vectores: A = 12N ∠ 15° y B = 8 N∠ 70° por el método gráfico del triángulo,a una escala de 1: 2
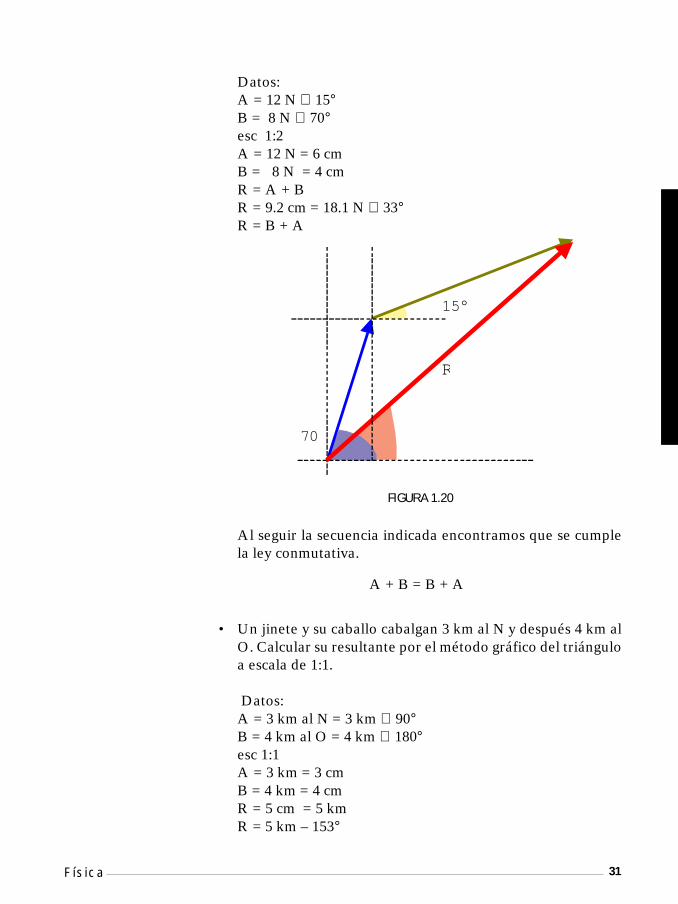
Datos:A = 12 N ∠ 15°B = 8 N ∠ 70°Esc 1:2A = 12 N = 6 cmB = 8 N = 4 cmR = A + BR = 9.2 cm = 18.1 N ∠ 33°
FIGURA 1.19
Utilizando el mismo sistema de vectores del problema ante-rior pero invirtiendo el orden de los vectores, grafíquelos.
15°
70R
31F ís ica
Datos:A = 12 N ∠ 15°B = 8 N ∠ 70°esc 1:2A = 12 N = 6 cmB = 8 N = 4 cmR = A + BR = 9.2 cm = 18.1 N ∠ 33°R = B + A
FIGURA 1.20
Al seguir la secuencia indicada encontramos que se cumplela ley conmutativa.
A + B = B + A
• Un jinete y su caballo cabalgan 3 km al N y después 4 km alO. Calcular su resultante por el método gráfico del triánguloa escala de 1:1.
Datos:A = 3 km al N = 3 km ∠ 90°B = 4 km al O = 4 km ∠ 180°esc 1:1A = 3 km = 3 cmB = 4 km = 4 cmR = 5 cm = 5 kmR = 5 km – 153°
15°
70
R

32 G U Í A PA R A E L E S T U D I A N T E
FIGURA 1.21
• Utilizando el mismo sistema de vectores del problema ante-rior pero invirtiendo el orden de los vectores, grafíquelos.
Datos:A = 3 km al N = 3 km ∠ 90°B = 4 km. al O = 4 km ∠ 180°esc 1:1A = 3 km = 3 cmB = 4 km = 4 cmR = 5 cm = 5 kmR = 5 km. – 153°
FIGURA 1.22
A + B = B + A
R
R

33F ís ica
Este método es una generalización del método gráfico del trián-gulo para más de dos vectores y consiste en una repetición su-cesiva de dicho método.
Para sumar vectores utilizando este método, se procede de lamanera siguiente:
Dado un sistema de tres o más vectores
1. Se grafican los vectores a la misma escala, de tal manera queel extremo del primero coincida con el origen del segundo,el extremo de éste debe coincidir con el origen del tercero, yasí sucesivamente hasta el último vector, como se muestra enla figura para el caso de un sistema de vectores.
FIGURA 1.23
2. Trazamos un segmento rectilíneo que une el origen del pri-mer vector con el extremo del último. Este segmento en lamisma escala que los vectores representa el vector suma o elvector resultante del sistema; su origen coincide con el ori-gen del primer vector y su extremo coincide con el extremodel último como se observa en la figura.
R = A + B + C + D + E
b) Método gráfico del polígono
DE C
B A
34 G U Í A PA R A E L E S T U D I A N T E
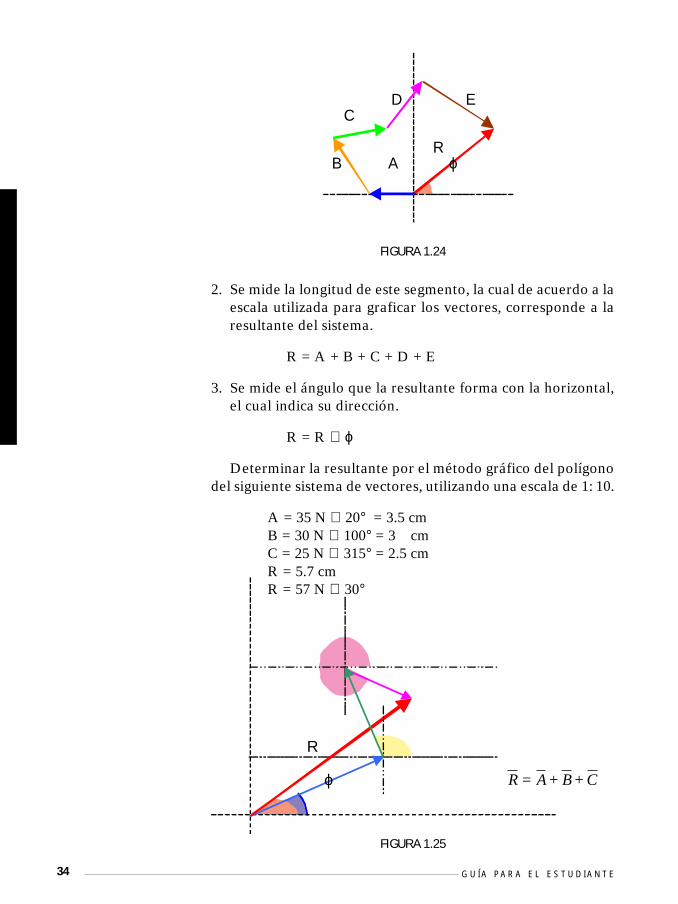
FIGURA 1.24
2. Se mide la longitud de este segmento, la cual de acuerdo a laescala utilizada para graficar los vectores, corresponde a laresultante del sistema.
R = A + B + C + D + E
3. Se mide el ángulo que la resultante forma con la horizontal,el cual indica su dirección.
R = R ∠ ϕ
Determinar la resultante por el método gráfico del polígonodel siguiente sistema de vectores, utilizando una escala de 1: 10.
A = 35 N ∠ 20° = 3.5 cmB = 30 N ∠ 100° = 3 cmC = 25 N ∠ 315° = 2.5 cmR = 5.7 cmR = 57 N ∠ 30°
FIGURA 1.25
D E C
R B A ϕ
R
ϕ R A B C= + +
35F ís ica
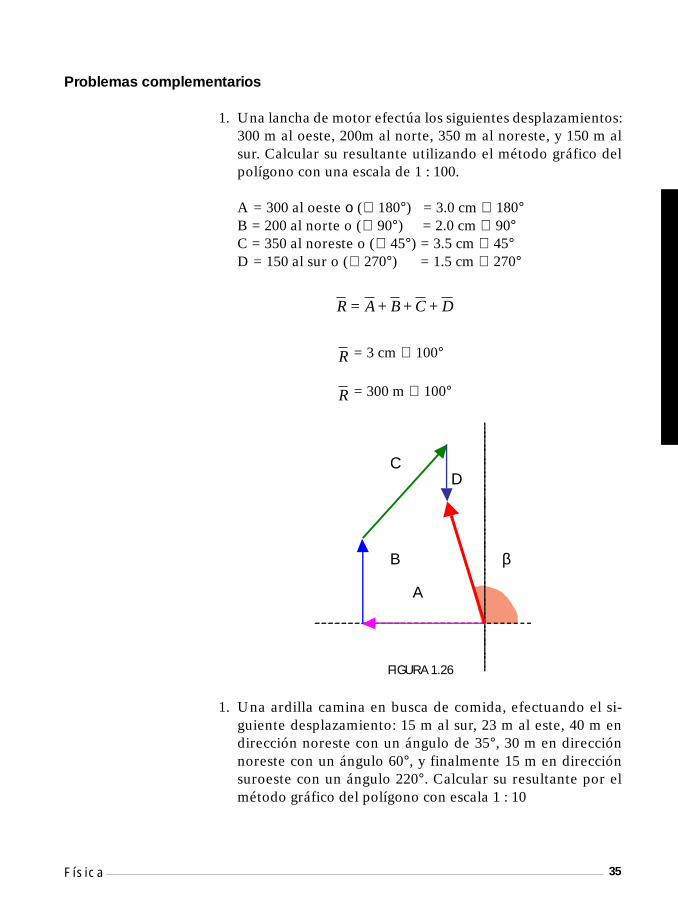
1. Una lancha de motor efectúa los siguientes desplazamientos:300 m al oeste, 200m al norte, 350 m al noreste, y 150 m alsur. Calcular su resultante utilizando el método gráfico delpolígono con una escala de 1 : 100.
A = 300 al oeste ο (∠ 180°) = 3.0 cm ∠ 180°B = 200 al norte o (∠ 90°) = 2.0 cm ∠ 90°C = 350 al noreste o (∠ 45°) = 3.5 cm ∠ 45°D = 150 al sur o (∠ 270°) = 1.5 cm ∠ 270°
R = 3 cm ∠ 100°
R = 300 m ∠ 100°
FIGURA 1.26
1. Una ardilla camina en busca de comida, efectuando el si-guiente desplazamiento: 15 m al sur, 23 m al este, 40 m endirección noreste con un ángulo de 35°, 30 m en direcciónnoreste con un ángulo 60°, y finalmente 15 m en direcciónsuroeste con un ángulo 220°. Calcular su resultante por elmétodo gráfico del polígono con escala 1 : 10
Problemas complementarios
R A B C D= + + +
C D
B β
A

36 G U Í A PA R A E L E S T U D I A N T E
A = 15 m al S (∠ 270°) = 1.5 cm ∠ 270°B = 23 m al E (∠ 0°) = 2.3 cm ∠ 0°C = 40 m al NE (∠ 35°) = 4 cm ∠ 35°D = 30 m al NE (∠ 60°) = 3 cm ∠ 60°E = 15 m al SO (∠ 220°) = 1.5 cm ∠ 220°Esc 1:10R = 3.8 cm ∠ 40°R = 38 m ∠ 40
R A B C D E= + + + +
E
D
R
θ
A B C
FIGURA 1.27
II. MÉTODO ANALÍTICO
a) Método analítico del triángulo (ley de Cosenos)
Este método consiste en utilizar el teorema de Pitágoras y algu-nos resultados de la trigonometría para encontrar la magnitudy el ángulo de la resultante de un sistema de dos vectores.
Si los dos vectores del sistema forman un ángulo de 90°, seutiliza el teorema de Pitágoras para encontrar el valor de lamagnitud de su resultante, y cualquier función trigonométricapara encontrar el valor del ángulo de esta resultante.
Si los vectores no son perpendiculares, se utiliza la ley de los
37F ís ica
cosenos para hallar la magnitud de su resultante y la ley de lossenos para encontrar su ángulo.
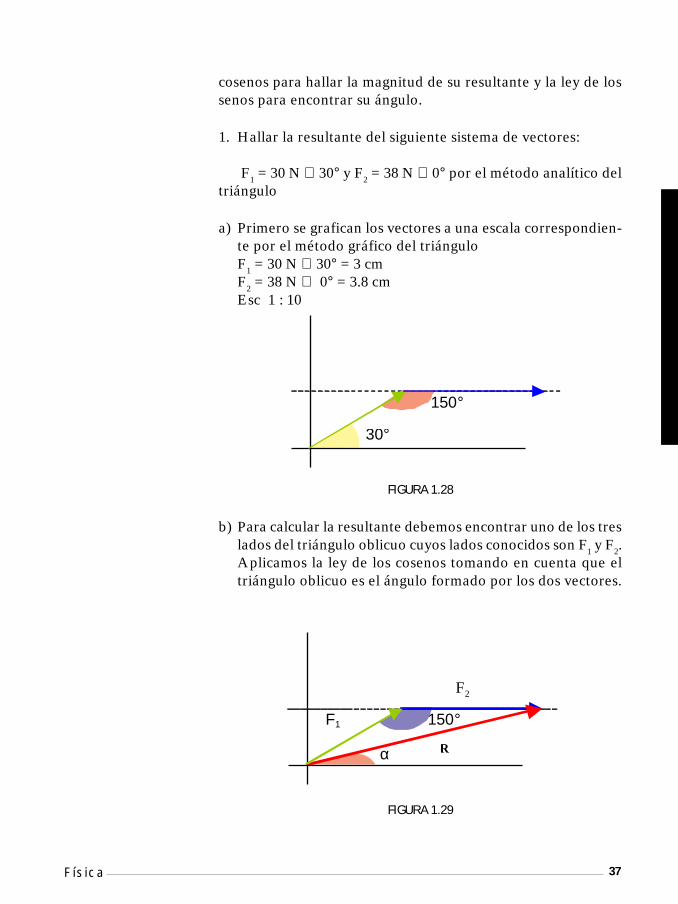
1. Hallar la resultante del siguiente sistema de vectores:
F1 = 30 N ∠ 30° y F2 = 38 N ∠ 0° por el método analítico deltriángulo
a) Primero se grafican los vectores a una escala correspondien-te por el método gráfico del triánguloF1 = 30 N ∠ 30° = 3 cmF2 = 38 N ∠ 0° = 3.8 cmEsc 1 : 10
FIGURA 1.28
b) Para calcular la resultante debemos encontrar uno de los treslados del triángulo oblicuo cuyos lados conocidos son F1 y F2.Aplicamos la ley de los cosenos tomando en cuenta que eltriángulo oblicuo es el ángulo formado por los dos vectores.
FIGURA 1.29
30°
150°
F1 150°
Rα
F2
38 G U Í A PA R A E L E S T U D I A N T E
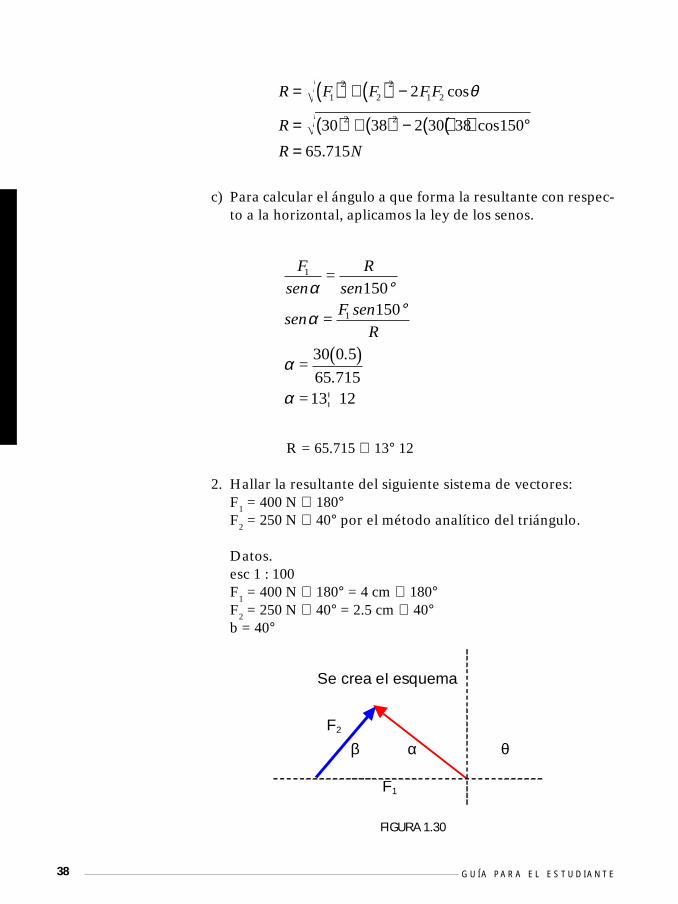
c) Para calcular el ángulo a que forma la resultante con respec-to a la horizontal, aplicamos la ley de los senos.
R = 65.715 ∠ 13° 12
2. Hallar la resultante del siguiente sistema de vectores:F1 = 400 N ∠ 180°F2 = 250 N ∠ 40° por el método analítico del triángulo.
Datos.esc 1 : 100F1 = 400 N ∠ 180° = 4 cm ∠ 180°F2 = 250 N ∠ 40° = 2.5 cm ∠ 40°b = 40°
FIGURA 1.30
R F F F F
R
R N
= ( ) + ( ) −
= ( ) + ( ) − ( )( ) °=
1
2
2
2
1 2
2 2
2
30 38 2 30 38 150
65 715
cos
cos
.
θ
F R
F
R
1
1
150150
30 0 5
65 71513 12
sen sen
sensen
.
.
α °
α °
α
α
=
=
= ( )
= ¦
Se crea el esquema
β α θF2
F1

39F ís ica
R= 263.25° ∠ 143° 24´
También podemos graficar los vectores de la siguiente mane-ra y es el mismo procedimiento:
FIGURA 1.31
R F F F F
R
R N
= ( ) + ( ) − ( )( )= ( ) + ( ) − ( )( ) °
=
1
2
2
2
1 2
2 2
2
400 250 2 400 250 40
263 25
cos
cos
.
β
F R
F
R
2
2
250 40263 25
37 6
sen sen
sensen
sensen
..
α β
α β
α °
α °
=
=
=
=
Se crea el esquema
F2
F1
c) Método analítico de las componentes rectangulares
Para estudiar las componentes rectangulares de un vector, seutiliza el concepto de proyección de un vector sobre un eje.
Proyección de un vector sobre un ejePara facilitar las cosas, consideremos el eje “X” como el eje so-bre el cual se proyecta el vector.

40 G U Í A PA R A E L E S T U D I A N T E
Sea V = V ∠ θ un vector con su origen en el punto “A” y su ex-tremo en el punto “B”. Si estos puntos son proyectados perpen-dicularmente sobre el eje de las “X”, se consideran los puntos“C” y “D” como se muestra en la figura.
FIGURA 1.32
Definimos la proyección del vector V sobre el eje “X” comola longitud del segmento rectilíneo CD, y se denota VX.
Del triángulo AEB de la figura anterior, se tiene:
Se realiza el mismo procedimiento para el eje de las “Y”:
VY = V sen θ
A θ
B
C D
E
cos
cos
cos
θ
θ
θ
= = =
=
=
AE
AB
CD
V
V
VV
VV V
X
X
X
Componentes Rectangulares de un Vector.
Dado un vector V = V ∠ θ, se puede graficar en el sistema car-tesiano de coordenadas (X,Y) como el de la figura.

41F ís ica
FIGURA 1.33
En donde θ es el ángulo formado por el vector y el eje “X”positivo, como se muestra en la figura.
La proyección del vector sobre el eje “X” recibe el nombrede la componente rectangular del vector V en el eje “X”, y laproyección sobre el eje “Y” se llama componente rectangulardel vector V en el eje “Y”, como se muestra en la figura.
Por consiguiente, las expresiones analíticas de las componen-tes rectangulares del vector están dadas por:
1. Calcular las componentes rectangulares del vectorA = 10 N ∠ 150°Solución:A = 10 N ∠ 150°θ = 180° - 150° = 30°
FIGURA 1.33BIS
θ
V
Primer CuadranteSegundo Cuadrante
Tercer CuadranteCuarto Cuadrante
Proyección de V en X
Proyección de V en Y
V V
V V
V VX
Y
= ∠==
θθθ
cos
sen
150°
30°

42 G U Í A PA R A E L E S T U D I A N T E
Utilizando las ecuaciones anteriores:AX = A cos θ = 10 N (cos 150°) = - 8.66 NAX = - 8.66 NAY = A sen θ = 10 N (sen 150°) = 5 NAY = 5 NEscala 1 : 0.5
2. Calcular las componentes rectangulares del vectorB = 25 m/s ∠ 217°Solución:B = 25 m/s ∠ 217°α = 217° - 180° = 37 °
Utilizando las ecuaciones anteriores.BX = B cos α = 25 m/s (cos 217°) = - 19.96 m/sBX = - 19.96 m/sBY = B sen α = 25 m/s (sen 217°) = - 15.04 m/sBY = - 15.04 m/s
FIGURA 1.34
3. Calcular las componentes rectangulares del vectorE = 10 N/C ∠ 340°Solución:E = 10 N/C ∠ 340°β = 340°- 360° = -20°EX = E cos β = 10 N/C (cos 340°) = 9.39 N/CEX = 9.39 N/CEY = E sen β = 10 N/C (sen 340°) = - 3.42 N/CEY = - 3.42 N/C
217°

43F ís ica
FIGURA 1.35
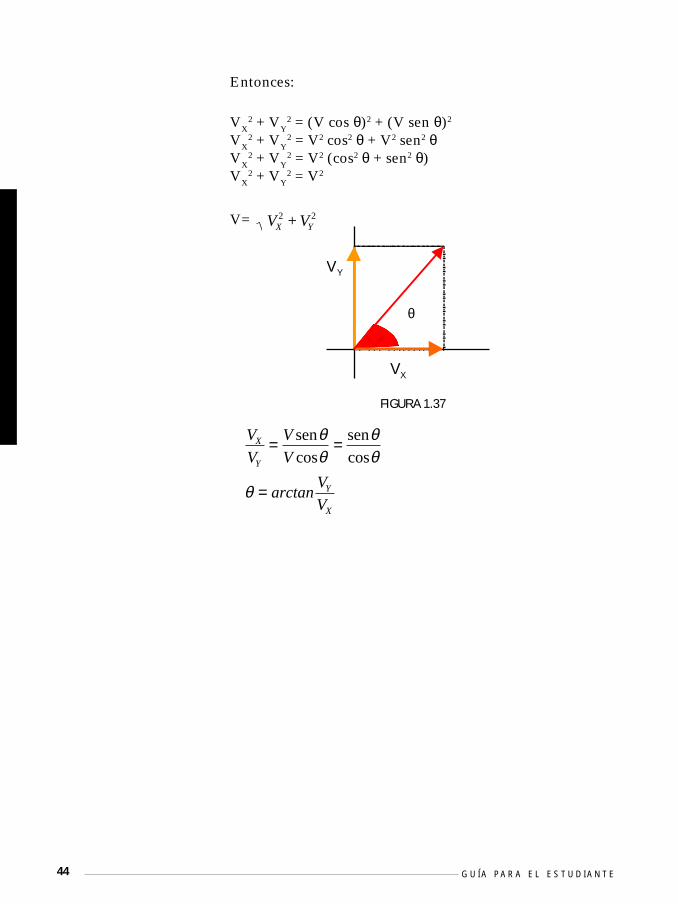
Dadas las componentes rectangulares de un vector V, éste pue-de obtenerse llevando perpendiculares a los ejes “X” y “Y”, apartir de los respectivos componentes, como se muestra en lafigura.
FIGURA 1.36
Recordando que las componentes están dadas por:
VX = V cos θ
VY = V sen θ
Obtención de un vector a partir de sus componentes rectangulares
VY
VX
44 G U Í A PA R A E L E S T U D I A N T E
Entonces:
VX2 + VY
2 = (V cos θ)2 + (V sen θ)2
VX2 + VY
2 = V2 cos2 θ + V2 sen2 θVX
2 + VY2 = V2 (cos2 θ + sen2 θ)
VX2 + VY
2 = V2
V= V VX Y2 2+
FIGURA 1.37
VY
VX
θ
V
V
V
V
arctanV
V
X
Y
Y
X
= =
=
sencos
sencos
θθ
θθ
θ
45F ís ica
VY
VX
VX
VY
VX
VY
VY
VX
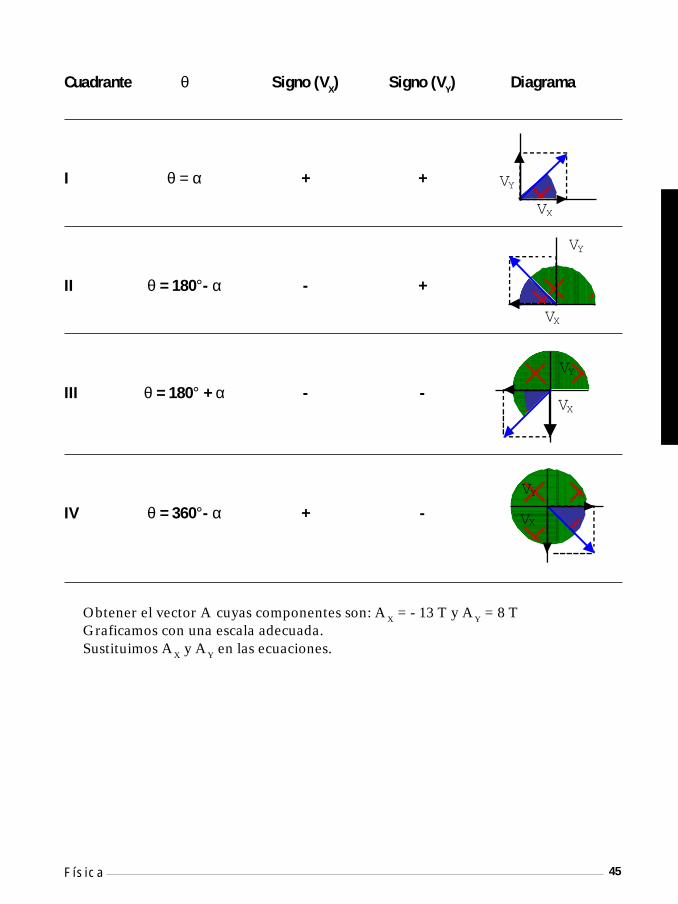
Cuadrante θ Signo (VX) Signo (VY) Diagrama
I θ = α + +
II θ = 180°- α - +
III θ = 180° + α - -
IV θ = 360°- α + -
Obtener el vector A cuyas componentes son: AX = - 13 T y AY = 8 TGraficamos con una escala adecuada.Sustituimos AX y AY en las ecuaciones.

46 G U Í A PA R A E L E S T U D I A N T E
F F F
F
F N
tan
X Y= +
= ( ) + ( )=
= −
= −= −=
−
2 2
2 2
1
25 35
43
3525
54 27
360 54 27
305 33
α
αθθ
°° °°
A A A
A
A T
A
A
arctan
X Y
Y
X
= +
= −( ) + ( )=
=
=−
= −= −=
2 2
2 213 8
15 26
813
31 36
180 31 36
148 24
.
α
α
α °θ ° °θ °
?
A = 15.26 T ∠ 148°24
FIGURA 1.38
AXθα
RAY

47F ís ica
1. Obtener el vector B dado por sus componentes: BX = -6 m/sy BY = - 7 m/sGraficamos con una escala adecuada.Sustituimos BX y BY en las ecuaciones.
A = 9.24 m/s ∠ 229°24
FIGURA 1.39
B B B
B
B m s
B
B
arctan
X Y
Y
X
= +
= −( ) + −( )=
=
= −−
== +=
2 2
2 26 7
9 24
76
49 24
180 31 36
229 24
. /
α
α
α °θ ° °θ °
VX
VY

48 G U Í A PA R A E L E S T U D I A N T E
2. Determinar la magnitud y la dirección del vector F cuyascomponentes son:
FX = 25 N y FY = - 35 NDatos:FX = 25 NFY = - 35 N
Solución:
FIGURA 1.40
θFY
α FX
R
Multiplicación de un escalar por un vector
El producto de un escalar k por un vector r se escribe kr, y esotro vector cuya magnitud es k veces mayor que la magnitud der, y cuya línea de acción es la misma que la del vector r. Si k espositivo, el sentido de kr será el mismo que el de r; pero si k esnegativo, el sentido de kr será el contrario al de r.
1. Si r = 3 T ∠ u k = 25
kr = 25 (3 T ∠ u)kr = 75 ∠ u
2. Si r = 5 N – 30° k = 6
kr = 6 (5 N ∠ 30°)kr = 30 ∠ 30°
49F ís ica
3. Si r = 4 N ∠ 90° k = - 1
kr = -1 (4 T ∠ 90°)kr = - 4 ∠ 90°kr = 4 ∠ 270°
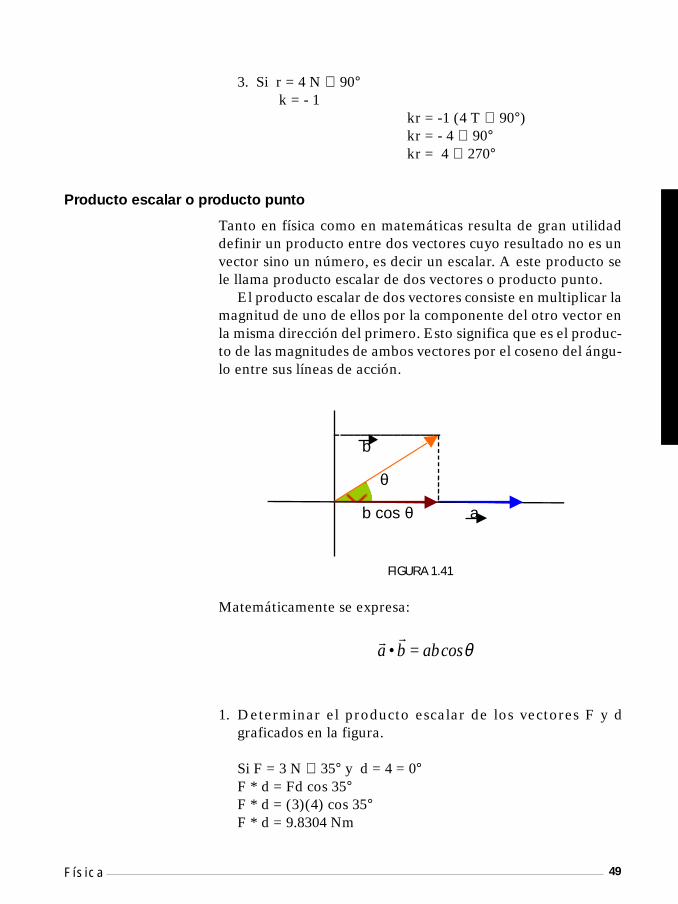
Producto escalar o producto punto
Tanto en física como en matemáticas resulta de gran utilidaddefinir un producto entre dos vectores cuyo resultado no es unvector sino un número, es decir un escalar. A este producto sele llama producto escalar de dos vectores o producto punto.
El producto escalar de dos vectores consiste en multiplicar lamagnitud de uno de ellos por la componente del otro vector enla misma dirección del primero. Esto significa que es el produc-to de las magnitudes de ambos vectores por el coseno del ángu-lo entre sus líneas de acción.
FIGURA 1.41
Matemáticamente se expresa:
1. Determinar el producto escalar de los vectores F y dgraficados en la figura.
Si F = 3 N ∠ 35° y d = 4 = 0°F * d = Fd cos 35°F * d = (3)(4) cos 35°F * d = 9.8304 Nm
b
θ
b cos θ a
rr
a • =b abcosθ
50 G U Í A PA R A E L E S T U D I A N T E
Algunas cantidades físicas que resultan del producto escalarde dos vectores son el trabajo mecánico, las potencia mecánica,o eléctrica, etc. Observe que el producto escalar de dos vectorestambién presenta la propiedad conmutativa de la multiplica-ción.
FIGURA 1.42
¿Qué es la técnica? Tomemos un ejemplo sencillo: la alfarería.En la alfarería se puso en práctica lo que los hombres habíantransmitido como experiencias de generación en generación, loque sabían sobre arcillas para hacer el barro y las formas de ela-borar vasijas. Cuando ese tipo de tareas se hace una y otra vez,se está haciendo uso de la técnica. Puede decirse que la técnicase inicia dentro de las sociedades del hombre primitivo, y es laaplicación sistemática de ciertos procedimientos bien definidospara obtener bienestar; para estos procedimientos se basan enalgunos conocimientos científicos.
Desde la época medieval se puso de manifiesto la divisiónentre ciencia y técnica. La ciencia era ocupación de sabios: seestudiaba en libros y trataba sobre fenómenos naturales, mien-tras que la tecnología abarcaba sólo las cosas prácticas y la eje-cutaba el artesano.
La palabra ciencia proviene del latín scientia, que significasabiduría. Así, la ciencia es conocimiento. Según Bunge, cien-cia es «ese creciente cuerpo de ideas que puede caracterizarsecomo conocimiento racional, sistemático, exacto, verificable ypor consiguiente falible. La ciencia es un sistema de ideas esta-blecidas provisionalmente (conocimiento científico) y como unaactividad productora de nuevas ideas (investigación científica).
F * d = 12 (0.8192)
DIFERENCIA ENTRE CIENCIA Y TÉCNICA

51F ís ica
Kedrop y Spérkrim expresan: «la ciencia es un sistema de con-ceptos acerca de los fenómenos y leyes del mundo externo o dela actividad espiritual de los individuos, que permite prever ytransformar la realidad en beneficio de la sociedad».
Lo cierto es que la ciencia y la técnica siempre van de lamano pues no hay ciencia sin técnicas ni técnica sin ciencias.
Hasta hace no muchos años se hablaba de una serie de pasosque tenían que seguirse en la investigación científica para obte-ner conclusiones y nuevas leyes. A esta serie de pasos se le co-nocía como método científico y consistía en observación, formu-lación de hipótesis, experimentación, comprobación de hipótesis(o modificaciones en su caso), etc. Hoy en día son tantas las ra-mas de la ciencia y los procedimientos seguidos para crear nue-vos conocimientos, que difícilmente puede hablarse de un mé-todo científico. De hecho hay muchos métodos científicos, y loque cuenta es la imaginación y la habilidad para crear ideas queexpliquen los fenómenos naturales y sociales, y que por supues-to estén de acuerdo con los resultados experimentales yobservacionales.
Describiremos de todas maneras algunos de los pasos “clási-cos” del método científico tradicional:
1. La formulación del problema.- En este punto se identificaun problema que requiera solución o una pregunta que ne-cesite contestación. Para formular un problema se requieredel conocimiento básico del tema en particular que se en-cuentra insertado en un cuerpo de teoría o teorías.
2. Formulación de la hipótesis.- Aquí se hace una propuestade solución al problema con carácter transitorio. Es una con-jetura o una posibilidad basada en datos confiables aproba-dos y publicados, de preferencia en revistas de prestigio o enlibros acreditados.
3.-Investigación.- Búsqueda de datos pertinentes que sirvanpara resolver el problema o aceptar o impugnar la hipótesis.
4.-Análisis e interpretación de datos .- Una vez recogidos losdatos de la investigación se procede a su análisis e interpre-
MÉTODO CIENTÍFICO
52 G U Í A PA R A E L E S T U D I A N T E
tación. Aquí se observará lo mas relevante del estudio. Eneste punto pueden hacerse asociaciones entre variables, o elefecto de un factor sobre un fenómeno. En muchas ocasio-nes, el cálculo estadístico será también de mucha ayuda paraconocer el resultado real de los datos obtenidos.
5.-Redacción de las conclusiones.- Una vez efectuada la faseanterior, el investigador procede a obtener sus conclusiones.
6.-Proceso de verificación.- Por último, con base a las conclu-siones y en conjugación con el establecimiento el problemay la hipótesis, esta última se acepta, se rechaza o se modifi-ca. Los datos obtenidos deberán ser suficientes para proce-der a aceptar o rebatir lo originalmente formulado.
MÉTODO EXPERIMENTAL
Al igual que ocurre con el método científico, no puede decirseque existan recetas para la realización de experimentos. Haymuchos métodos experimentales, tantos que casi podría afir-marse que para cada experimento hay uno, ya que los retos quenos plantean son siempre distintos. La habilidad del experimen-tador consiste en imaginar y llevar a cabo de la mejor maneraposible el control de sus variables para poder obtener resulta-dos lo más precisos posibles, y en este proceso se siguen muchoscaminos distintos.