tema5-engranajes
TRANSCRIPT

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
TEORÍA DE MECANISMOS
5.- TEORÍA GENERAL DE ENGRANAJES

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Objetivo:Comunicar el movimiento de un órgano a otro
Se emplean cuando es necesario un cambio en la velocidad o en el par de un dispositivo giratorio
Tipos de transmisiones mecánicas:
a) Transmisiones flexibles· correas· cadenas· cables· ejes flexibles
b) Transmisiones rígidas· ruedas de fricción· engranajes· sistemas articulados
compuestos por:
- cigüeñales- bielas- manivelas- embragues- frenos, etc.
Transmisiones Mecánicas

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Transmisiones mecánicas
cadenas correas engranajes

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Transmisión por correas
Transmisión por correas
Transmisión por correa con velocidad ajustable
Ventajas:Permiten gran distancia entre centros
Funcionamiento suave y silencioso
Bajo coste de mantenimiento
Inconvenientes:Potencias moderadas
Gran volumen
Peligro de DESLIZAMIENTO (asincronía)

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Transmisión por cadenas y cables
Transmisión por cadenas
TRANSMISIÓN POR CADENAS
Ventajase inconvenientes:Permiten gran distancia entre centros
Coste y mantenimiento intermedio entre cadenas y engranajes
NO existe peligro de DESLIZAMIENTO.
TRANSMISIÓN POR CABLESVentajase inconvenientes:
Permiten mayores distancias entre centrosCoste y mantenimiento bajosPequeña capacidad de transmisión de potenciaExiste peligro de DESLIZAMIENTO.

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Con conexión externa
Características:Es el modo más sencillo de transmisión de potencia de un eje rotatorio a otro
Movimiento transmitido por fricción
InconvenientesMáxima fuerza de fricción: F = µ·N
Ruedas de fricción (I)
Transmisión de par limitada
Con conexión interna
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Si el par demandado requiere una fuerza
tangencial superior a la máxima disponible:
DESLIZAMIENTO ENTRE AMBOS CILINDROS
Desgaste
Asincronía
SOLUCIÓN:
Incorporar medios de trabamiento trasmisión por fuerza y
forma ENGRANAJES
Ruedas de fricción (II)

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Rodadura pura + relación de transmisión constante los perfiles sólo pueden ser dos circunferencias
(a) Transmisión entre ejes paralelos:Cilindros de fricción:
Externos
Internos
Si no hay deslizamiento
Ruedas de fricción (III)
22 2
111
vri vr
ω= =ω
11 2
2
rv v ir
= ⇒ =

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
(b) Transmisión entre ejes que se cortan:
CONOS de fricción
(c) Transmisión entre ejes que se cruzan:
HIPERBOLOIDES de fricción
NO hay rodadura, pero las superficies son siempre tangentes entre sí
Ruedas de fricción (IV)
1
2
rir
=

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Ventajas:Es el método más sencillo de transmisión de potencia de un eje a otro
Inconvenientes:
Máxima fuerza de fricción: F = µ·N
Si el par demandado requiere una fuerza tangencial superior a lamáxima disponible: DESLIZAMIENTO ENTRE AMBOS CILINDROS
Desgaste
Asincronía
SOLUCIÓN:
Incorporar medios de trabamiento trasmisión por fuerza y forma
ENGRANAJES
Ruedas de fricción (V)
Transmisión de par limitada

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Tipos de engranajes
•Rectos – externo
– interno
•Cónicos rectos
•Cónicos helicoidales
•Zerol
•De corona y piñón cilíndrico
•Helicoidales cruzados
•De Sinfín Cavex
•De sinfín envolvente
•Hipoidales
•Espiroide
•Helicon Beveloid
– Simples
– Dobles
– De esqueleto de pescado (herringbone)
•Helicoidales
Ejes paralelos (engranajes cilíndricos)
Ejes que se cortan (engranajes cónicos)
Ejes que se cruzan en el espacio (engranajes hiperbólicos)

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Engranajes cilíndricos de dentado recto
Transmiten movimiento entre ejes paralelos
(a) externos: sentidos de giro opuestos
(b) internos: sentidos de giro iguales

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Dientes inclinados soportan carga axial engrane
progresivo:Menos VIBRACIONES
Menos RUIDO
En (b) y (c) están compensadas las componentes axiales
de los esfuerzos
Engranajes cilíndricos de dentado oblicuo
(a) simple(b) doble
(c) Herringbone

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Engranajes cónicos
Transmiten par y velocidad entre ejes que se cortan
(a) Cónico rectos
(c) zerol
(b) Cónico helicoidal
(d) De corona y piñón recto
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
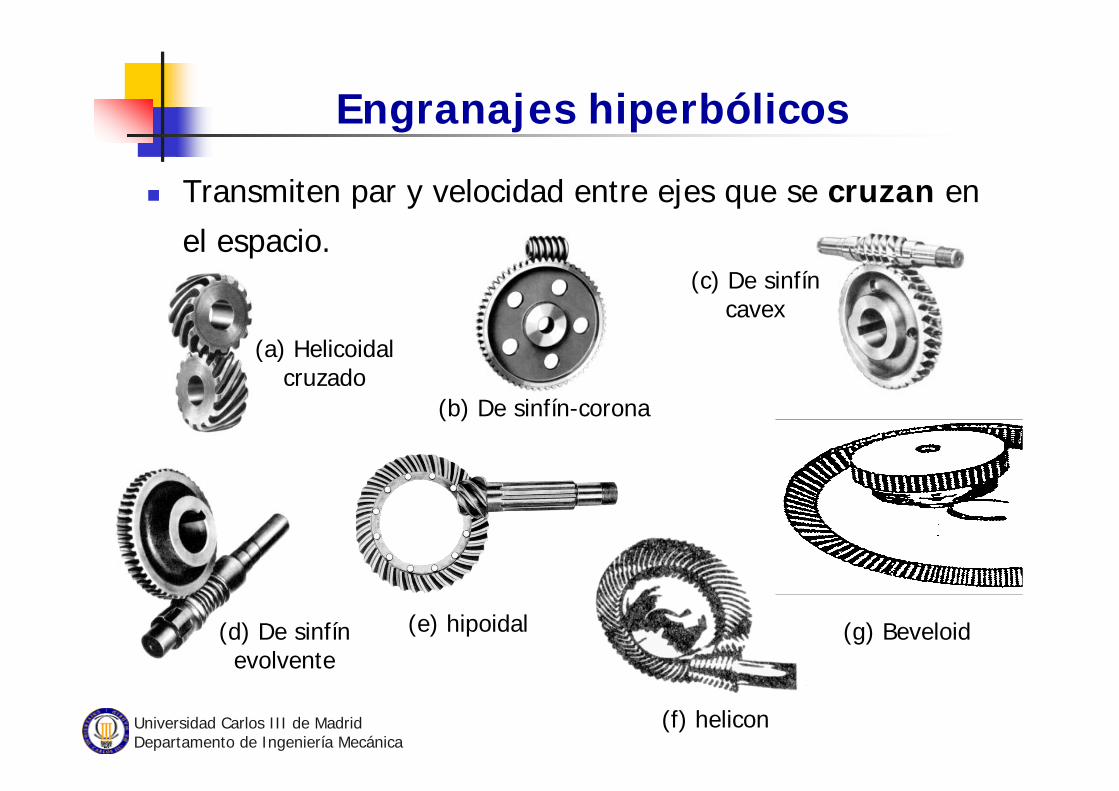
Engranajes hiperbólicos
Transmiten par y velocidad entre ejes que se cruzan en
el espacio.
(a) Helicoidal cruzado
(b) De sinfín-corona
(c) De sinfín cavex
(d) De sinfín evolvente
(e) hipoidal
(f) helicon
(g) Beveloid

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Generación efectiva de los flancos de de los dientes
Procesos de mecanizado:FresadoCepillado
Cortador en forma de cremalleraCortador en forma de piñón
Formado con sinfín
Procesos de acabado:Cepillado
Bruñido
Esmerilado
Pulido
Otros métodos:Fundición
Extrusión
Estampación
Sinterizado, etc
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
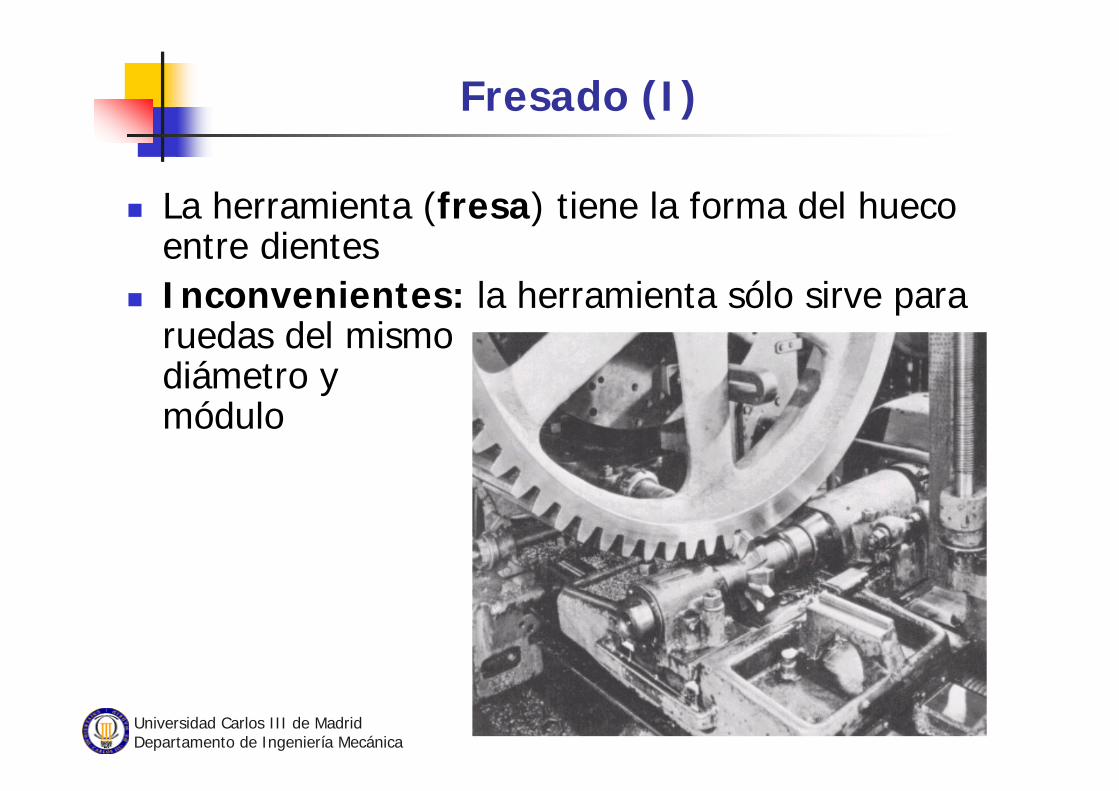
Fresado (I)
La herramienta (fresa) tiene la forma del hueco entre dientesInconvenientes: la herramienta sólo sirve para ruedas del mismo diámetro y módulo
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
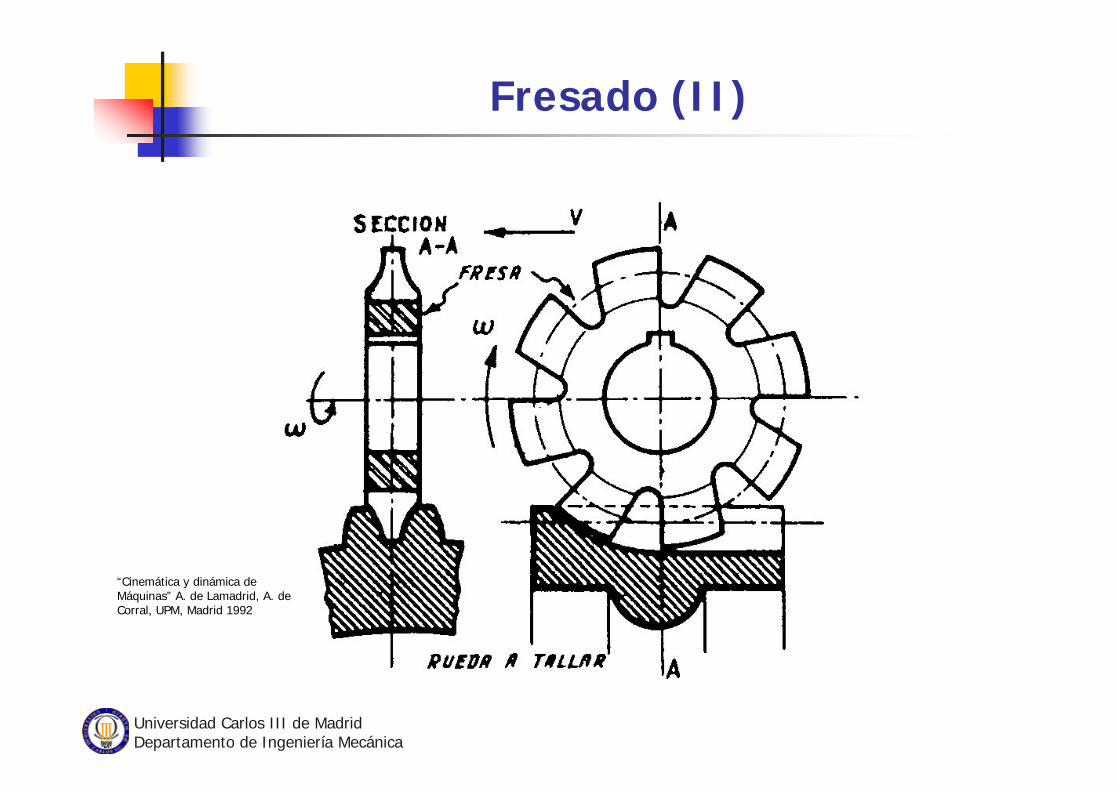
Fresado (II)
“Cinemática y dinámica de Máquinas” A. de Lamadrid, A. de Corral, UPM, Madrid 1992

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Cepillado (I)
Útil en forma de cremallera:La herramienta es una cremallera del mismo módulo que la rueda a tallar.El corte se debe al movimiento de vaivén de la herramienta en la dirección del eje de la ruedaSe enfrenta la herramienta a un disco de radio ra.
La herramienta penetra hasta que su línea media es tangente a la circunferencia primitiva de referencia
Se gira ligeramente el disco y se desplaza la cremallera como si estuvieran engranando
Cuando se ha cortado un diente se reposiciona la cremallera

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Cepillado (II)
“Cinemática y dinámica de Máquinas” A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
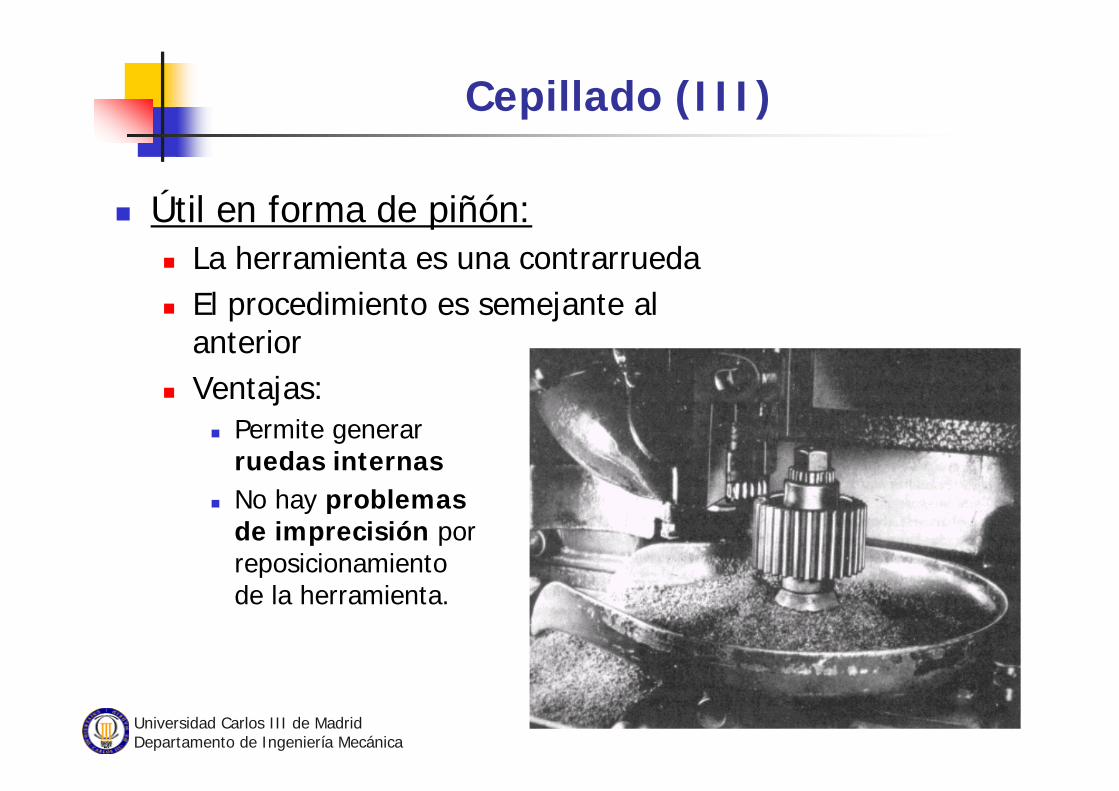
Cepillado (III)
Útil en forma de piñón:La herramienta es una contrarruedaEl procedimiento es semejante al anteriorVentajas:
Permite generar ruedas internasNo hay problemasde imprecisión por reposicionamientode la herramienta.
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
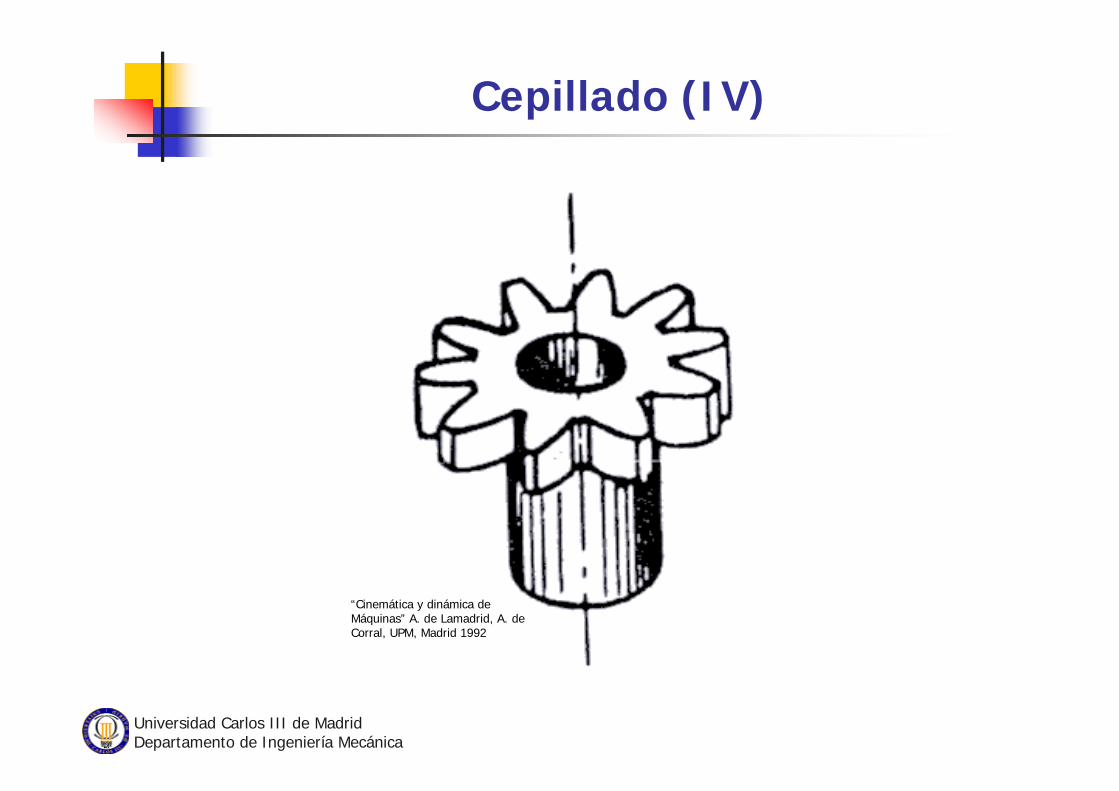
Cepillado (IV)
“Cinemática y dinámica de Máquinas” A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
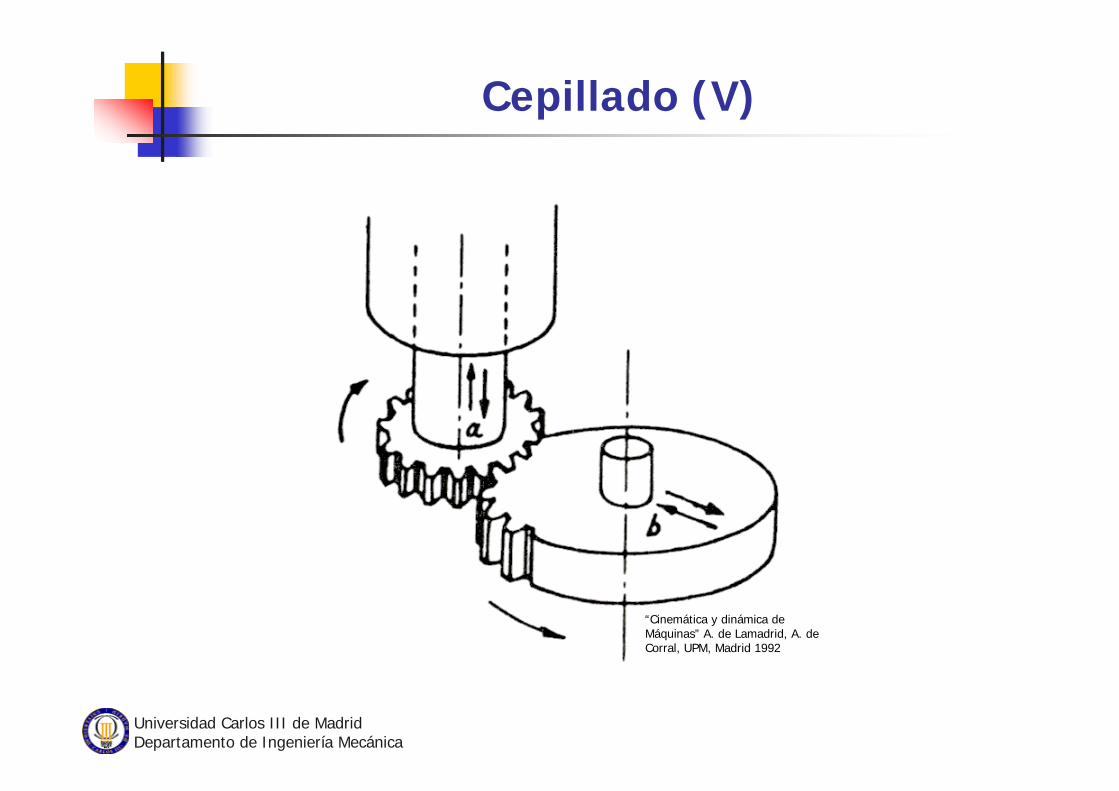
Cepillado (V)
“Cinemática y dinámica de Máquinas” A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
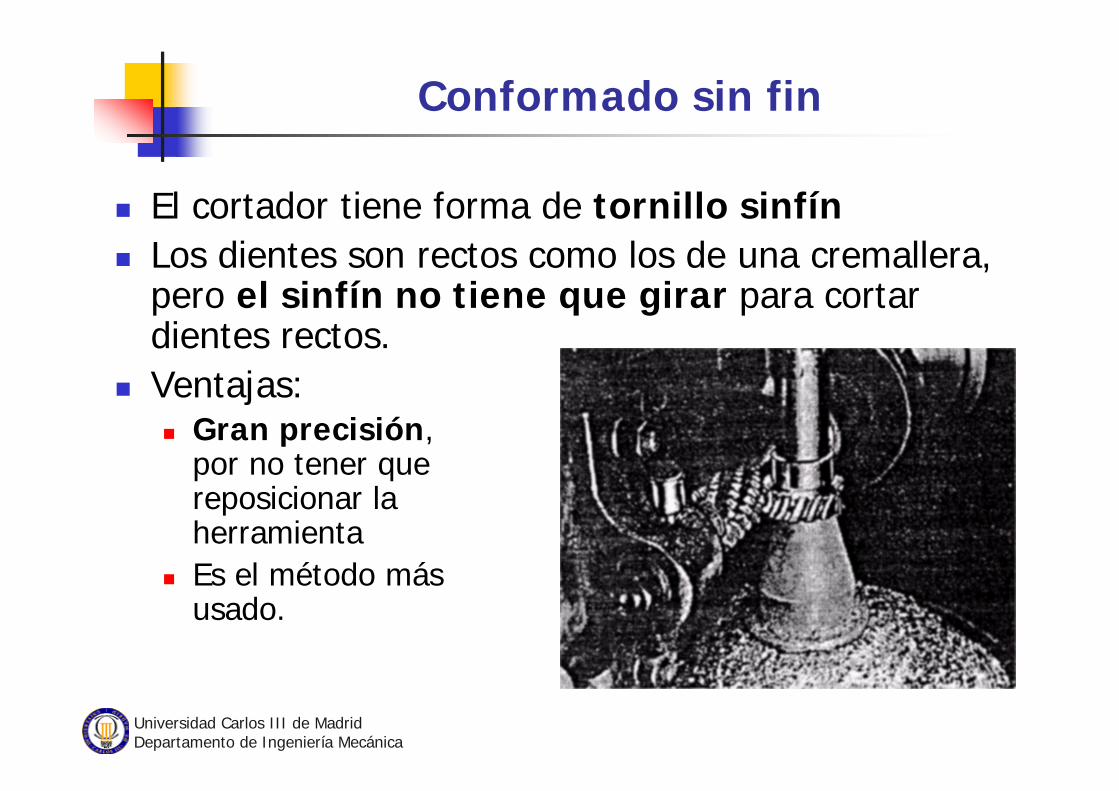
Conformado sin fin
El cortador tiene forma de tornillo sinfínLos dientes son rectos como los de una cremallera, pero el sinfín no tiene que girar para cortar dientes rectos.Ventajas:
Gran precisión, por no tener que reposicionar la herramientaEs el método más usado.
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
P
VA3
VA2
Tangente de contacto
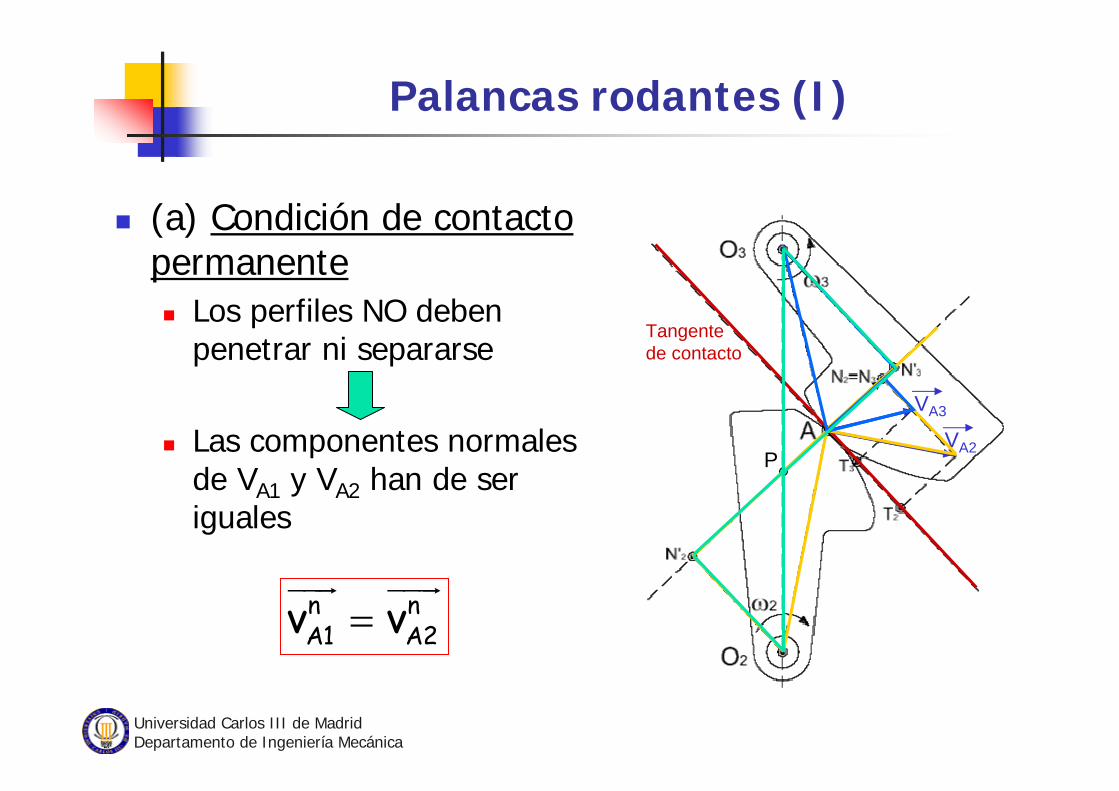
Palancas rodantes (I)
(a) Condición de contacto permanente
Los perfiles NO deben penetrar ni separarse
Las componentes normales de VA1 y VA2 han de ser iguales
n nA1 A2v v=
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
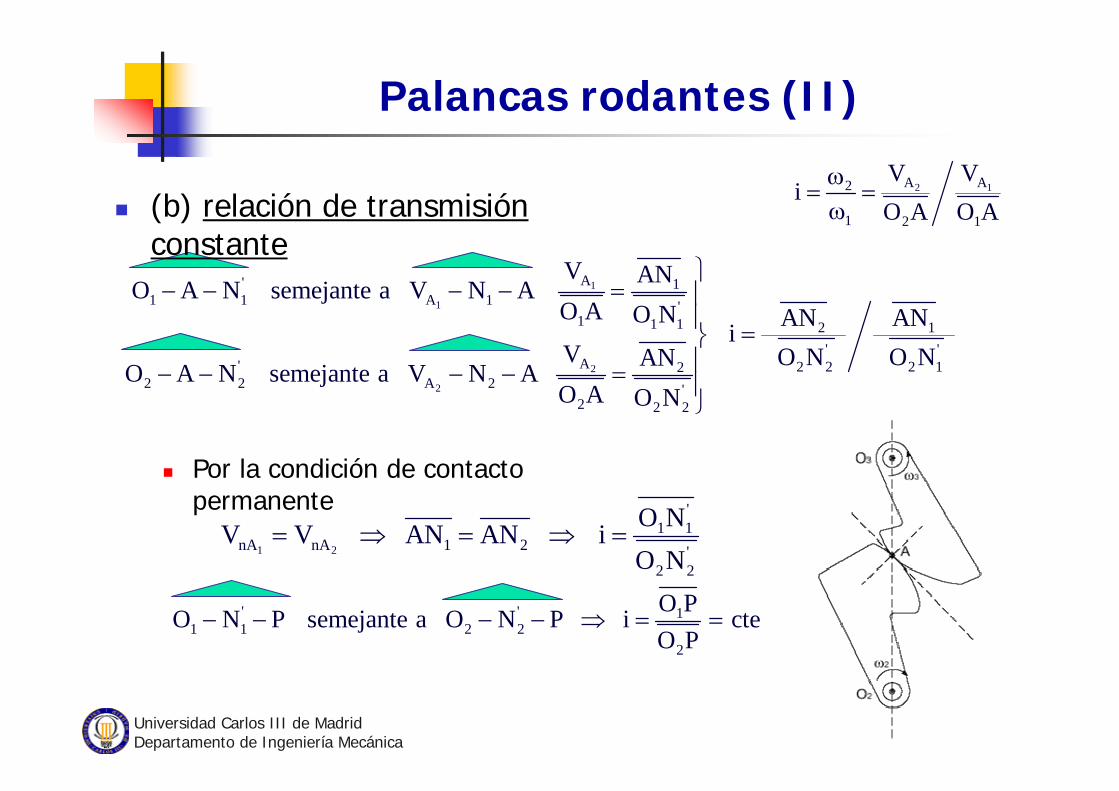
2 1A A2
1 2 1
V Vi
O A O Aω
= =ω
1 2
'1 1
nA nA 1 2 '2 2
O NV V AN AN iO N
= ⇒ = ⇒ =
1
1
2
2
A' 11 1 A 1 '
1 1 1 2 1' '
A' 2 2 2 122 2 A 2 '
2 2 2
V ANO A N semejante a V N AO A O N AN ANiV O N O NANO A N semejante a V N AO A O N
⎫− − − − = ⎪
⎪ =⎬⎪− − − − = ⎪⎭
Palancas rodantes (II)
(b) relación de transmisión constante
Por la condición de contacto permanente
' ' 11 1 2 2
2
O PO N P semejante a O N P i cteO P
− − − − ⇒ = =
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Palancas rodantes (III)
La normal común y la línea de centros se cortan en un punto fijo P.
Los perfiles que cumplen esta condición se llaman PERFILES CONJUGADOS
(c) Condición de rodadura pura:Deslizamiento: diferencia de velocidades tangencialesHabrá RODADURA PURA si las componentes tangenciales de VA1 y VA2 son iguales.
Como El contacto se produce sobre la línea de centros
( )t tA1 A2v v−
t tA1 A2
A1 A2n nA1 A2
v vcontacto permanente v v
v v⎫=⇒ ⇒ =⎬= ⎭
A1 1 A2 2 1 2v OA y v O A O ,O yAestan alineados⊥ ⊥ ⇒

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Perfiles conjugados (I)
Transmisión del movimiento con relación constante de velocidades angulares
OBJETIVO: Evitar deslizamientos entre elementos rodantesSOLUCIÓN: Incorporar dientes de cualquier forma.
Engranajes primitivos (200 a.c.): Ruedas giratorias de madera a las que se fijaban elementos de formas rudimentarias (molinos de viento, ruedas hidráulicas, relojería, etc.)
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Aparición del motor de vapor ( ≈ 1750 ):Se transmiten mayores pares y velocidadesLas transmisiones NO uniformes provocaban fuertes choques entre dientes y los destruíanSurge la necesidad de obtención de dientes que proporcionen transmisión con relación constante de las velocidades angulares de entrada y salidaPERFILES CONJUGADOS
Perfiles conjugados (II)
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Perfiles conjugados empleados en engranajes
En teoría pueden emplearse cualquier pareja de perfiles conjugados.Por consideraciones prácticas, sólo se emplean dos tipos de perfiles conjugados:
Perfil cicloide:Fue el más empleado en la Revolución industrial hasta principiosde siglo XX, pero hoy día sólo se utiliza en mecanismos de relojería.
Perfil de Evolvente de Círculo:En la actualidad es el perfil de uso universal, salvo en relojería y bombas de paletas. Presenta las siguientes ventajas:
Versatilidad a la hora de diseñarOtras características inherentes a su geometría que se verán más adelante

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Generación de perfiles conjugados
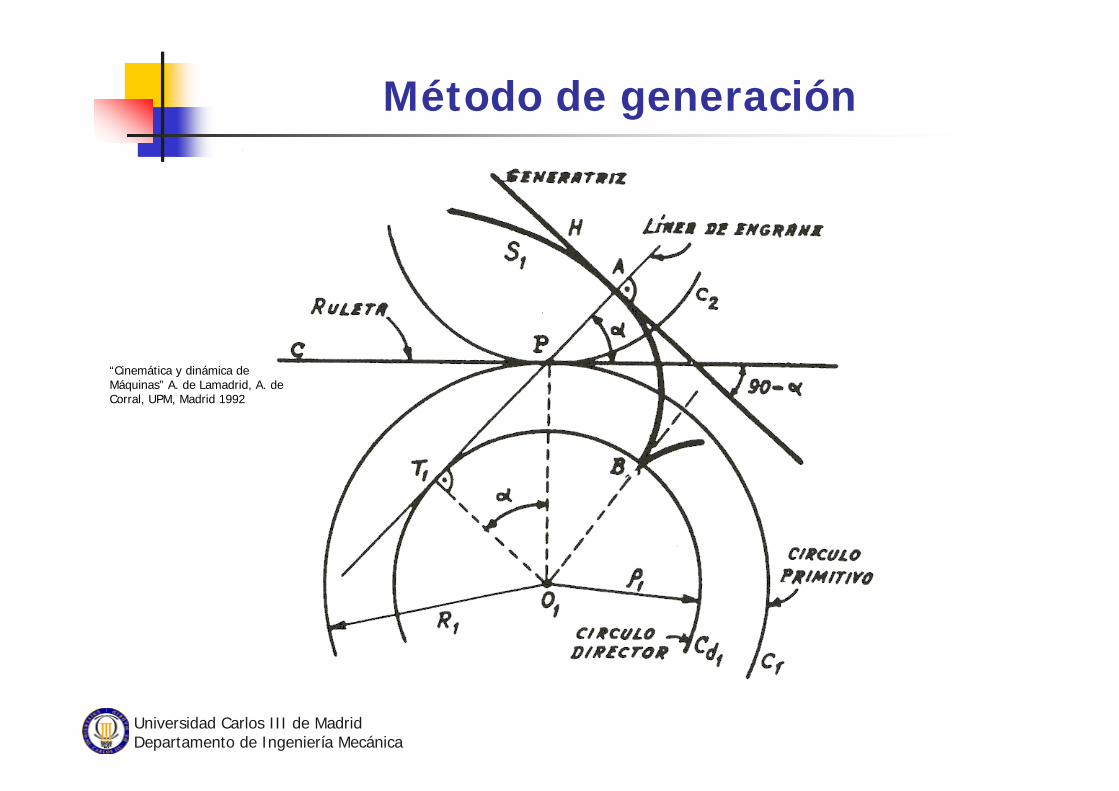
Para cualquier perfil que se de a los dientes de una rueda, siempre existe un perfil para los de la otra que es conjugado del primero.
Método de generación:Se hace rodar una circunferencia
sobre la otra
La evolvente de las posiciones de un diente es el perfil del diente conjugado.
Este método es la base de la talla de perfiles por generación
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Método de generación
“Cinemática y dinámica de Máquinas” A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
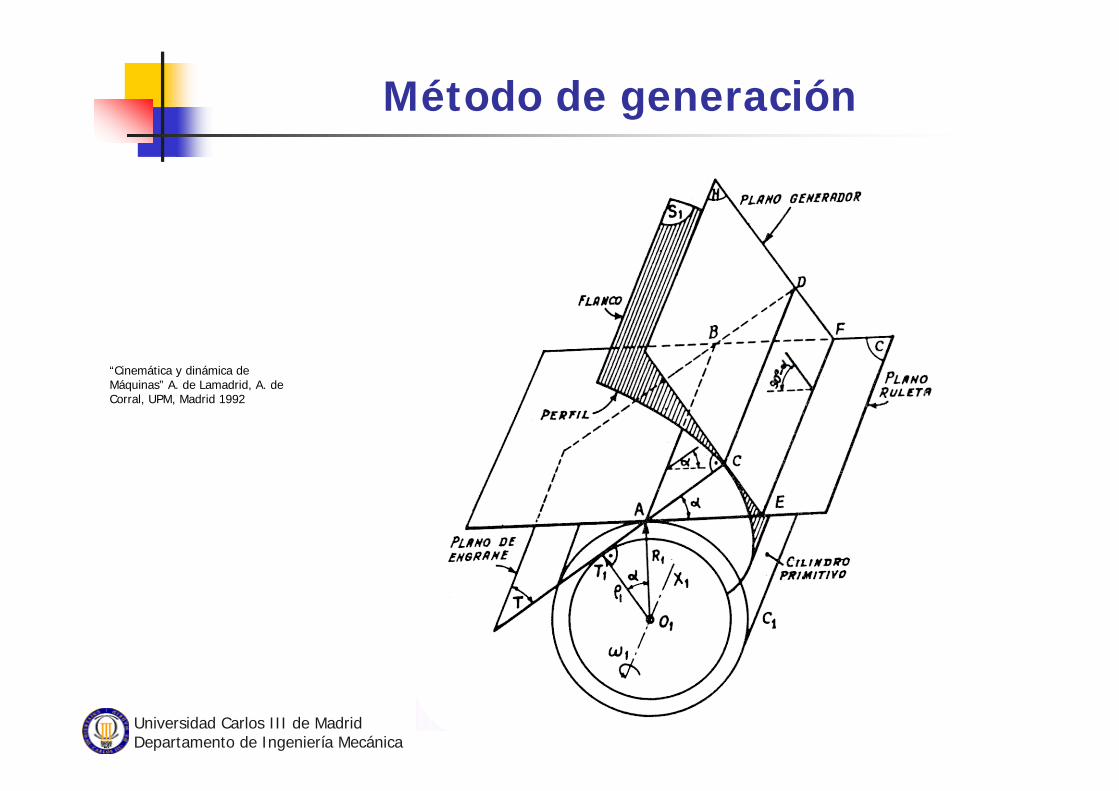
Método de generación
“Cinemática y dinámica de Máquinas” A. de Lamadrid, A. de Corral, UPM, Madrid 1992
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Perfil de evolvente (I)
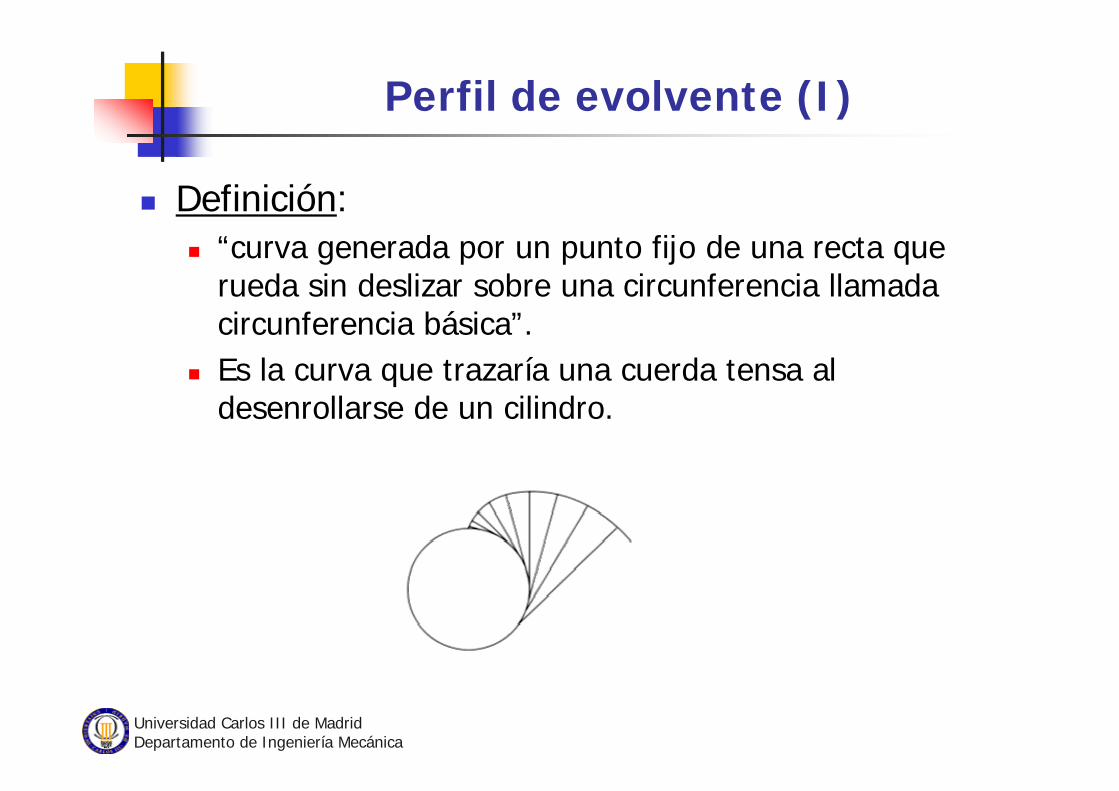
Definición:“curva generada por un punto fijo de una recta que rueda sin deslizar sobre una circunferencia llamada circunferencia básica”.Es la curva que trazaría una cuerda tensa al desenrollarse de un cilindro.

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Perfil de evolvente (II)
Propiedades:El cordel es tangente a la circunferenciaEl centro de curvatura es el punto de tangencia del cordel y la circunferencia baseLa evolvente es siempre normal al cordel.
Normal al perfil de evolvente y tangente a la
circunferencia base
Perfil de evolvente
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Transmisión uniforme con dientes de evolvente
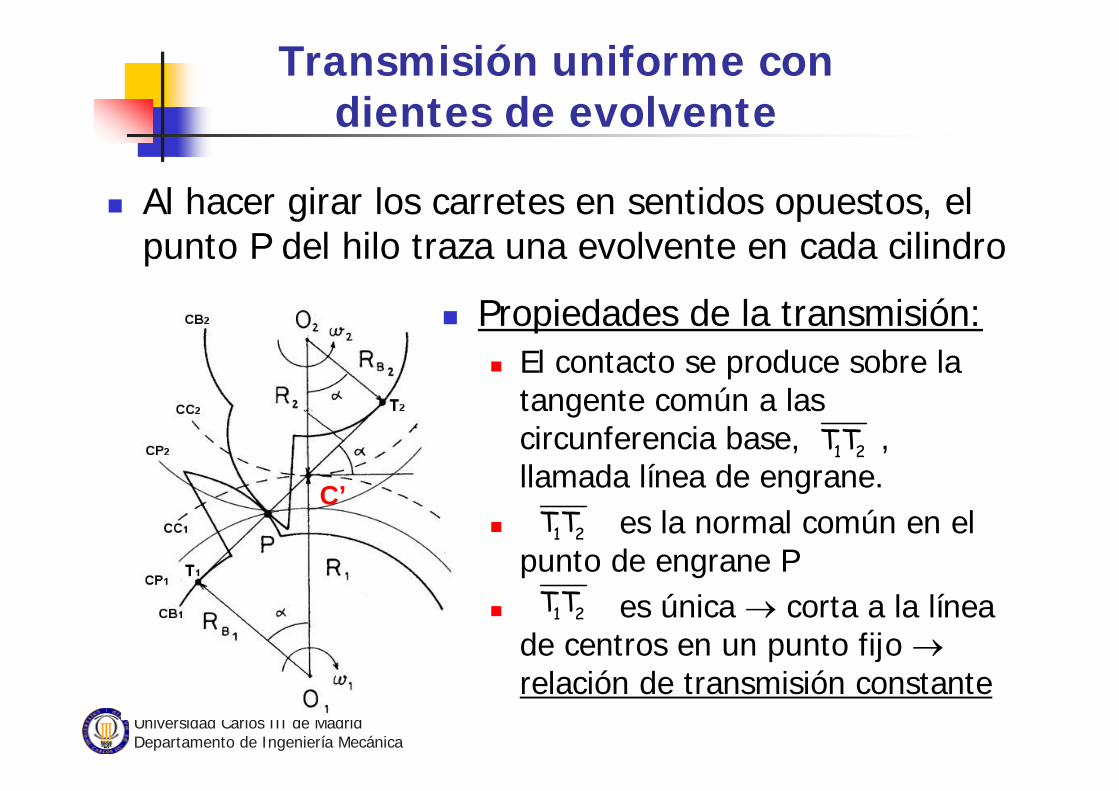
Al hacer girar los carretes en sentidos opuestos, el punto P del hilo traza una evolvente en cada cilindro
C’
Propiedades de la transmisión:El contacto se produce sobre la tangente común a las circunferencia base, , llamada línea de engrane.
es la normal común en el punto de engrane P
es única → corta a la línea de centros en un punto fijo →relación de transmisión constante
1 2TT
1 2TT
1 2TT
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
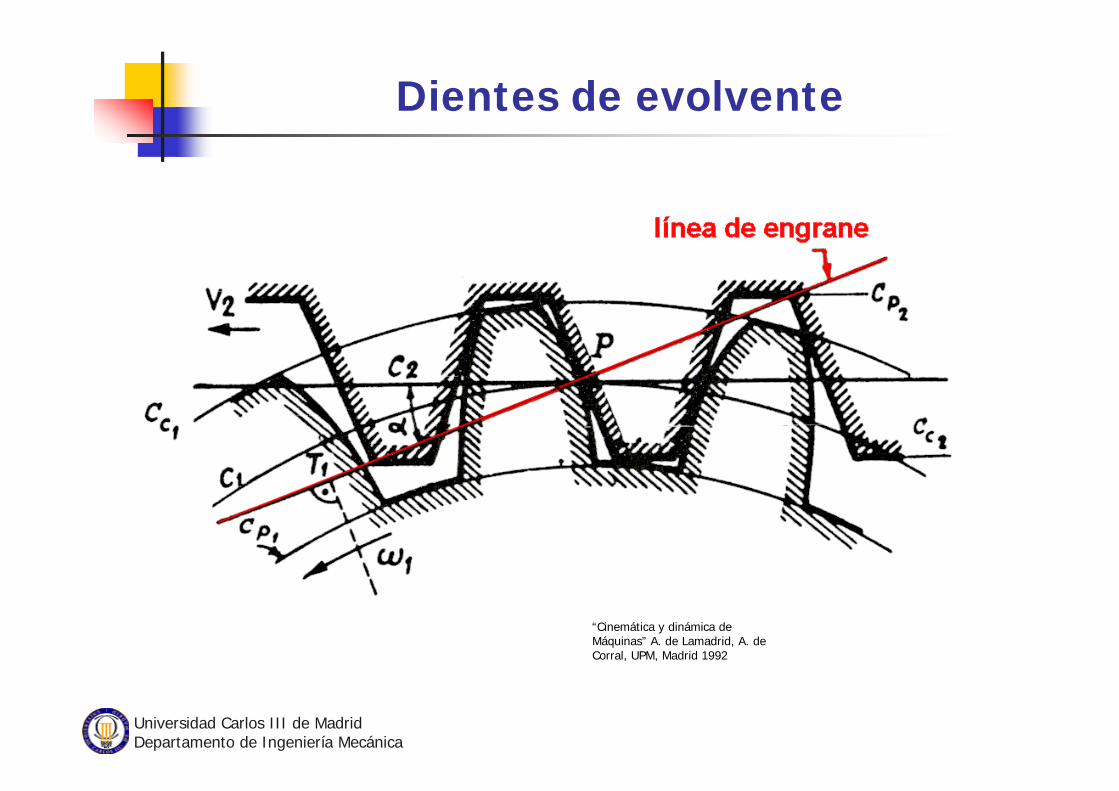
Dientes de evolvente
“Cinemática y dinámica de Máquinas” A. de Lamadrid, A. de Corral, UPM, Madrid 1992

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Ley fundamental del engrane
La relación de transmisión debe ser constante
La normal común a los perfiles de los dientes, en
todos los puntos de contacto dentro del segmento
de engrane, debe pasar por un punto fijo de la
línea de centros, llamado punto primitivo.

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Ley fundamental de engrane
Evolvente → Longitud recorrida por el punto de contacto sobre la línea de engrane es igual al arco girado por las circunferencias básicas.
Como
Así pues
1 1 2 2PP' QQ ' Q Q '= =
bQQ' r= α ⋅
1 2b1 b2
b111 2b1 b2
2 b2
r rrt r t rr
α ⋅ = α ⋅ω
ω ⋅ ∆ ⋅ = ω ⋅ ∆ ⋅ ⇒ =ω
b11
2 b2
ri cter
ω= = =ω

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Nomenclatura. Pareja de ruedas (I)
a) Pareja de ruedas
Piñón: rueda dentada de menor diámetroRueda: rueda dentada de mayor diámetroCircunferencia base (rb): circunferencias a partir de las cuales se generan los perfiles de evolventesLínea de centros: línea que une los centros, O1 y O2 de las dos circunferencias básicas

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Línea de engrane, : tangente común a las circunferencias básicas. Sobre ella se produce el contacto entre los dientes.
Punto primitivo C’ : punto de intersección de la línea de
engrane con la línea de centros
Circunferencias primitivas de funcionamiento (r’):
circunferencias de las teóricas ruedas de fricción a las que se
han incorporado dientes. Su radio es tal que el movimiento de
rodadura entre ambas tendría lugar en el punto primitivo C’.
Ángulo de presión de funcionamiento (α’): ángulo que forma
la línea de presión con la tangente común a las
circunferencias primitivas por el punto C’.
Nomenclatura. Pareja de ruedas (II)
1 2TT
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Nomenclatura. Rueda aislada (I)
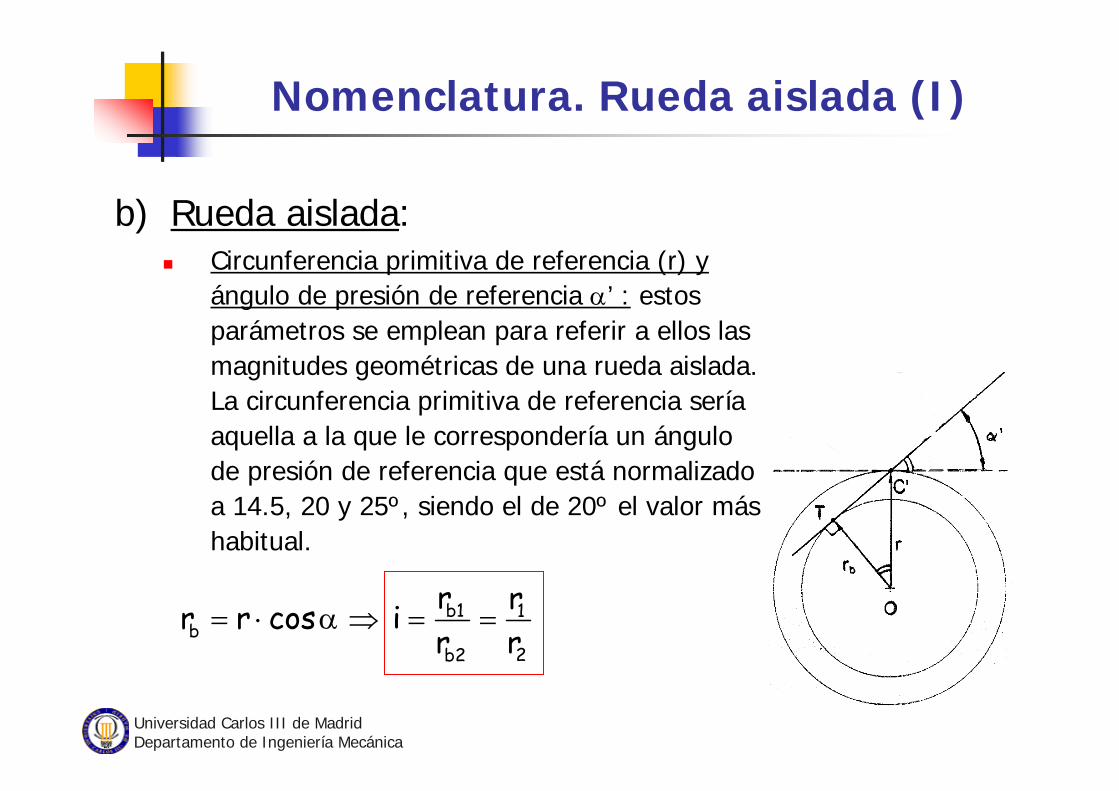
b) Rueda aislada:Circunferencia primitiva de referencia (r) y ángulo de presión de referencia α’ : estos parámetros se emplean para referir a ellos las magnitudes geométricas de una rueda aislada. La circunferencia primitiva de referencia sería aquella a la que le correspondería un ángulo de presión de referencia que está normalizado a 14.5, 20 y 25º, siendo el de 20º el valor más habitual.
b1 1b
2b2
r rr r cos ir r
= ⋅ α ⇒ = =

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Número de dientes de la rueda zPaso p: distancia entre puntos homólogos de dos perfiles consecutivos de una misma rueda, medida sobre la circunferencia primitiva de referencia.
Para que dos ruedas engranen deben tener el mismo paso.Módulo m: cociente entre el diámetro primitivo de referencia y el número de dientes.
Dos ruedas engranan si tienen el mismo módulo.
Paso diametral (diametral pitch), dp: cociente entre el número de dientes y el diámetro primitivo de referencia expresado en pulgadas.
2 rpzπ
=
p2rmz
= =π
11 1
2 2 2
mz 2r zir mz 2 z
= = =
zdp2 r(pulgadas)
=⋅
Nomenclatura. Rueda aislada (II)

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Nomenclatura. Dentadura (I)
c) Dentadura:
Circunferencia de cabeza (ra):circunferencia que limita los dientes por su parte superiorCircunferencia de pie (rf): circunferencia que limita el hueco entre dientes por su parte inferior. El hueco debe ser suficientementeprofundo para dejar pasar la cabeza de los dientes de la otra rueda.

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Altura de cabeza o adendo, ha : distancia radial entre la circunferencia primitiva y la cabeza del diente.Altura de pie o dedendo, hf: distancia radial entre la raíz del diente y la circunferencia primitivaAltura total, h: suma de la altura de cabeza y la de pie
Holgura o juego circunferencial: hueco que dejan al acoplar una pareja de dientes. Necesaria para permitir la deflexión de los dientes, el paso del lubricante y la expansión térmicaHuelgo o juego en cabeza, c: hueco que dejan una pareja de dientes al engranar, entre la cabeza del diente y el fondo del espacio interdental de la rueda conectada. Suele valer:
Altura de trabajo hw: diferencia entre la altura total del diente y el juego.
a fh h h= +
c 0.25 m= ⋅
Nomenclatura. Dentadura (II)
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Espesor s : Espesor del diente, medido sobre la circunferencia primitiva
Hueco e: hueco entre dientes, medido sobre la circunferencia primitiva.
Se cumple que
cara: parte de la superficie del diente que queda entre la circunferencia primitiva y la de cabezaFlanco: parte de la superficie de un diente que queda entre la circunferencia primitiva y la de pieAltura de flanco b: anchura del diente medida en dirección paralela al eje.
2 r mzs2 2
π π= =
me s2π
= =
p e s= +
Nomenclatura. Dentadura (III)
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
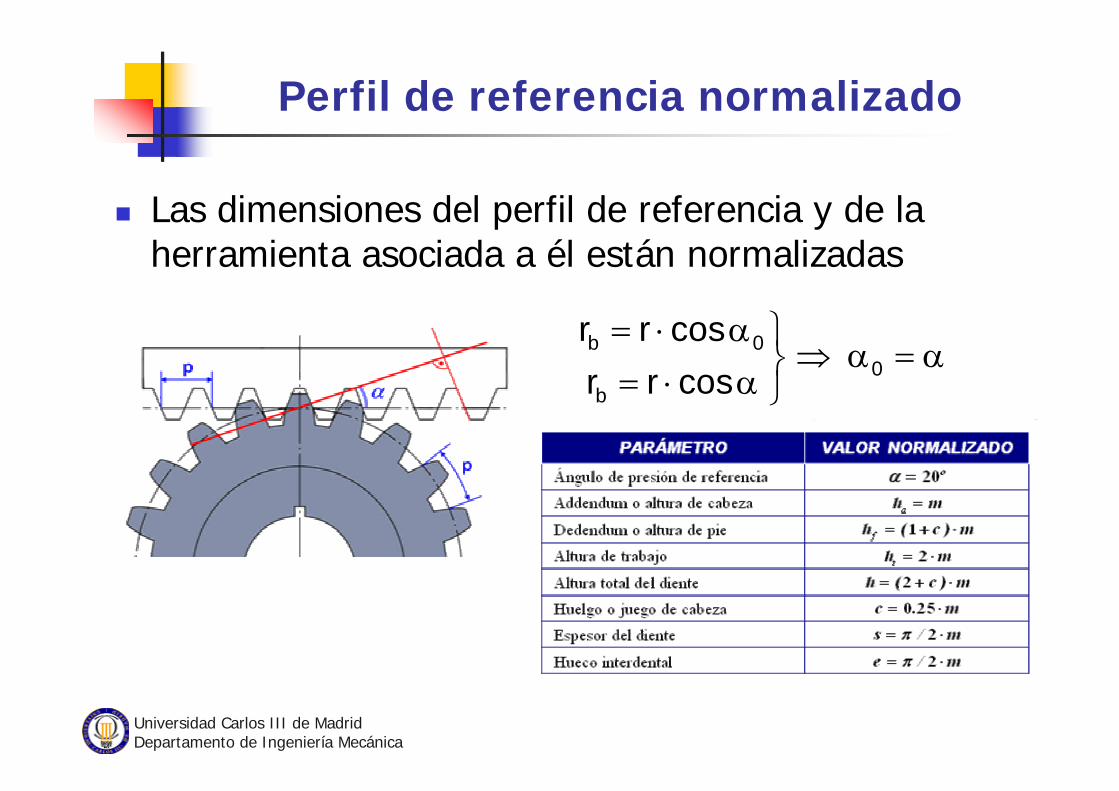
b 00
b
r r cosr r cos= ⋅ α ⎫
⇒ α = α⎬= ⋅ α ⎭
Perfil de referencia normalizado
Las dimensiones del perfil de referencia y de la herramienta asociada a él están normalizadas

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Perfil de referencia (I)
Cremallera de referencia:Útil de corte ficticio que se emplearía para generar los dientesde un engranaje con dimensiones normalizadas.
Perfil de referencia:Sección normal de la cremallera de referencia.Se emplea para definir las dimensiones normalizadas del dentado.
Perfil de referencia del dentadoPerfil de referencia de la herramienta

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
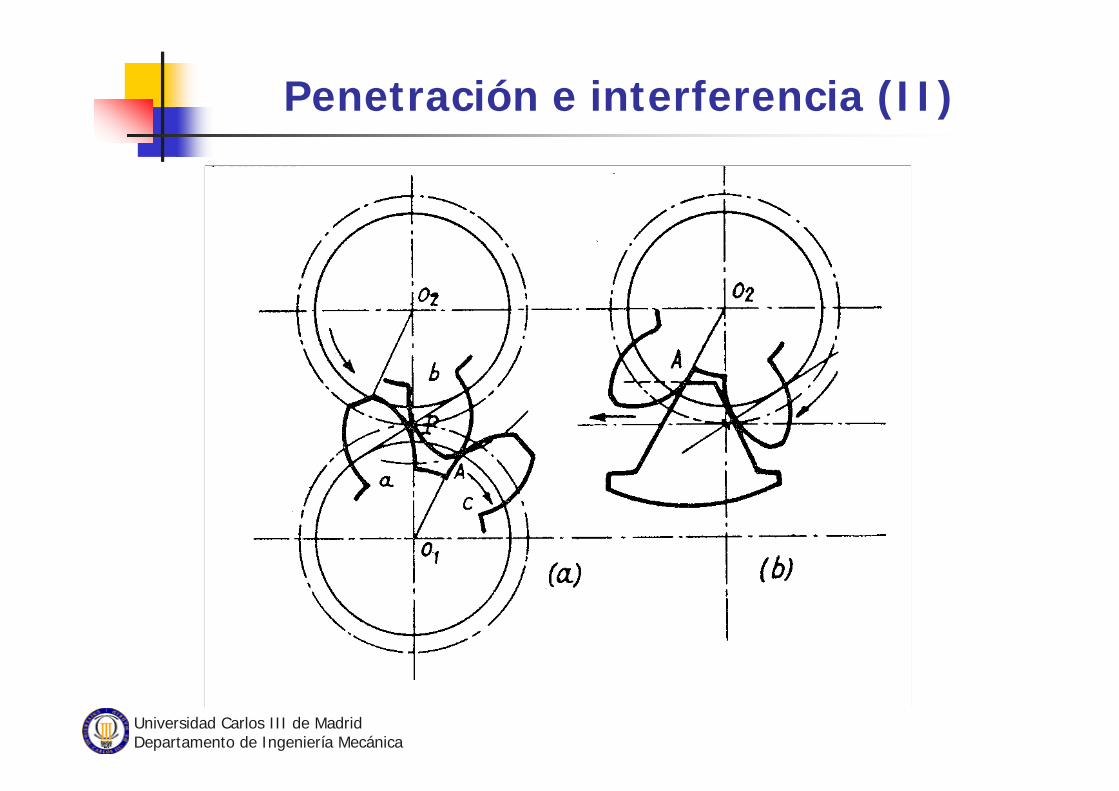
Penetración e interferencia (I)
La evolvente NO puede extenderse por debajo de su circunferenciabase.Si la herramienta penetra en el círculo básico ⇒ PENETRACIÓN del diente ⇒ menor resistencia mecánicaLa porción de diente que queda por debajo NO tiene perfil de evolvente e interfiere con la cabeza del otro diente ⇒ INTERFERENCIA entre dientes.
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Penetración e interferencia (II)

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
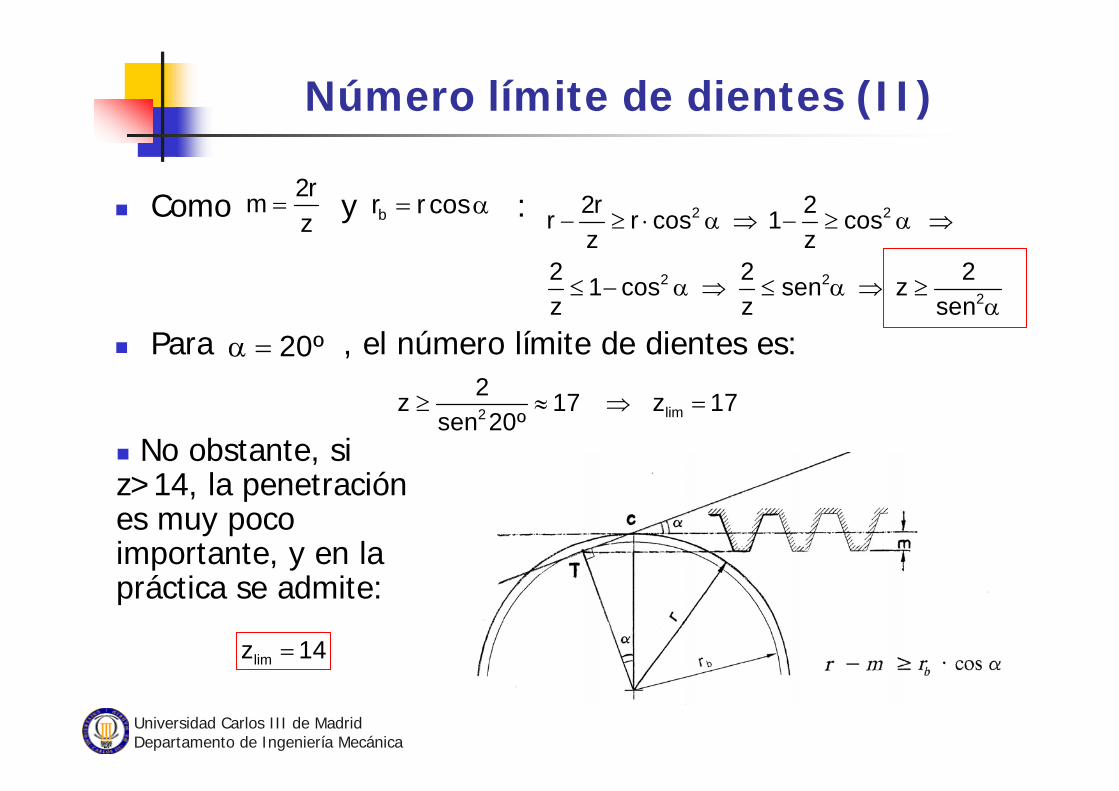
Número límite de dientes (I)
OBJETIVO: evitar la penetraciónSituación límite de penetración:
La cabeza de la herramienta sale tangencialmente al flanco que acaba de generar, y no lo daña.El extremo del flanco de la herramienta NO debe sobrepasar el punto T, pues allí la velocidad relativa de la herramienta y el diente es tangente a ambos.
Si el extremo de la cremallera se extiende más allá de T, su velocidad no es tangente al flanco del diente, y penetra en él.
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Número límite de dientes (II)
Como y :
Para , el número límite de dientes es:
2rmz
= br r cos= α
20ºα =
2 2
2 22
2r 2r r cos 1 cosz z
2 2 21 cos sen zz z sen
− ≥ ⋅ α ⇒ − ≥ α ⇒
≤ − α ⇒ ≤ α ⇒ ≥α
No obstante, si z>14, la penetración es muy poco importante, y en la práctica se admite:
lim2
2z 17 z 17sen 20º
≥ ≈ ⇒ =
limz 14=
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
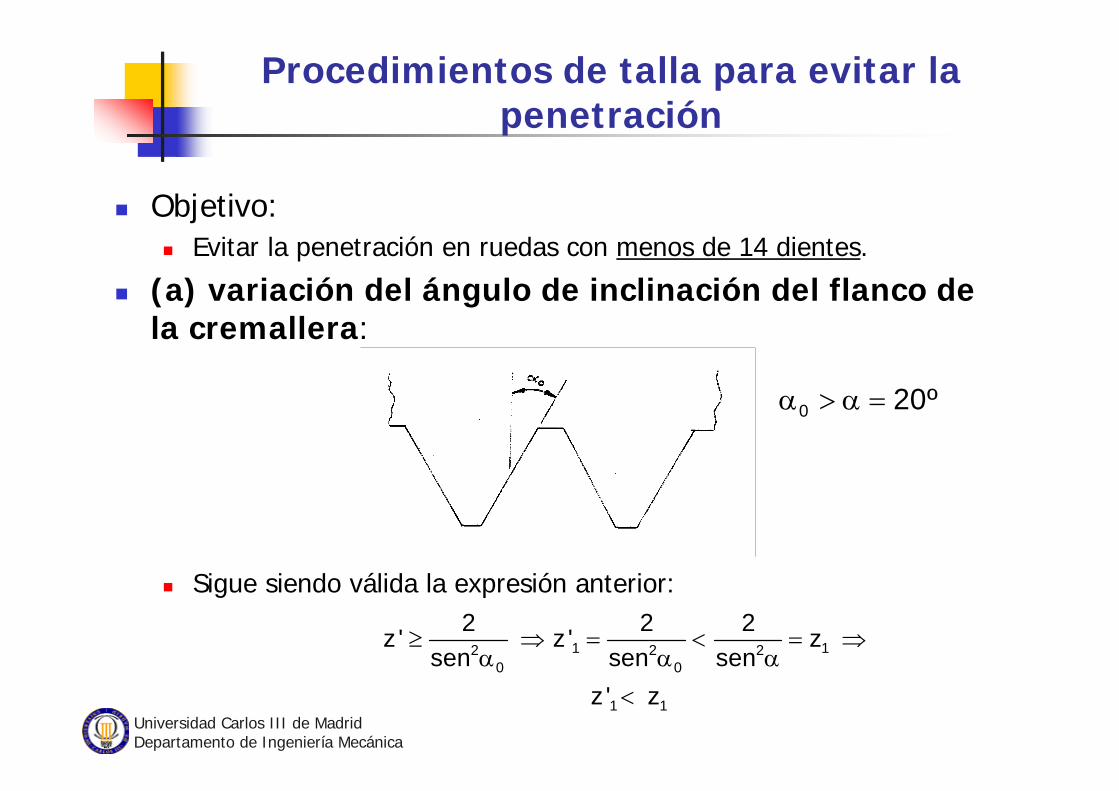
Procedimientos de talla para evitar la penetración
Objetivo:Evitar la penetración en ruedas con menos de 14 dientes.
(a) variación del ángulo de inclinación del flanco de la cremallera:
Sigue siendo válida la expresión anterior:
0 20ºα > α =
1 12 2 20 0
1 1
2 2 2z ' z ' zsen sen sen
z ' z
≥ ⇒ = < = ⇒α α α
<
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
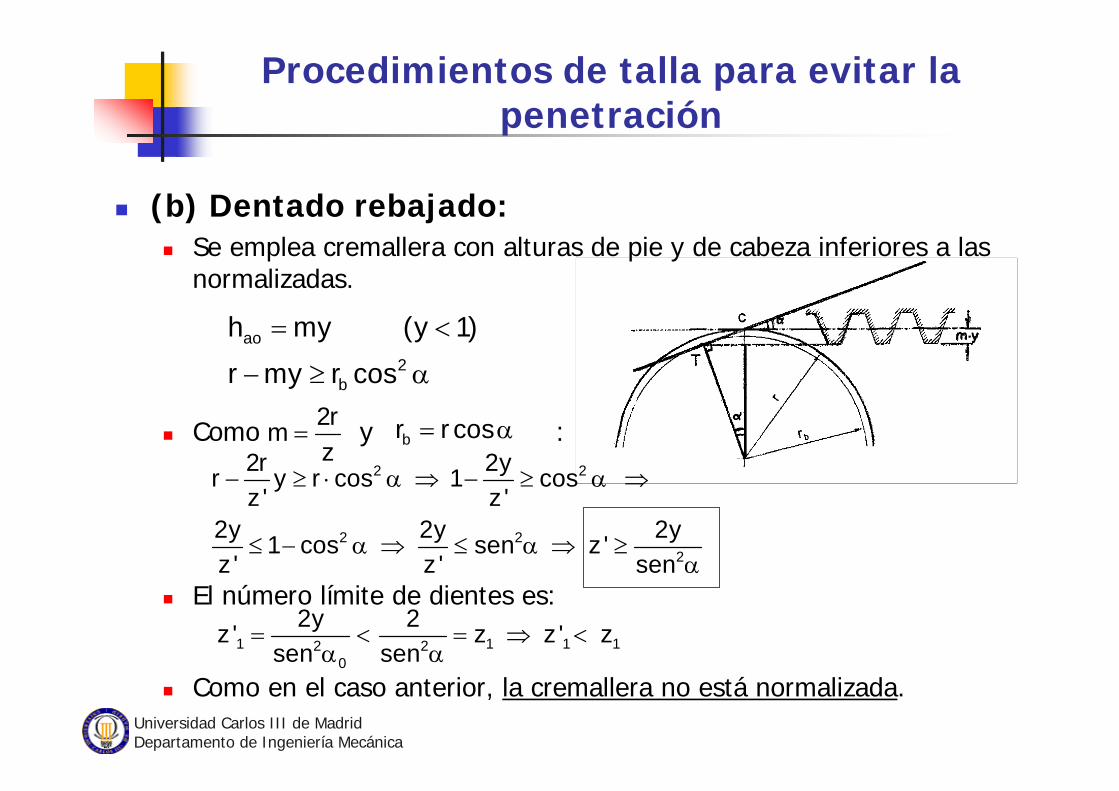
(b) Dentado rebajado:Se emplea cremallera con alturas de pie y de cabeza inferiores a las normalizadas.
Como y :
El número límite de dientes es:
Como en el caso anterior, la cremallera no está normalizada.
Procedimientos de talla para evitar la penetración
ao2
b
h my (y 1)r my r cos
= <
− ≥ α2rmz
= br r cos= α2 2
2 22
2r 2yr y r cos 1 cosz ' z '
2y 2y 2y1 cos sen z 'z ' z ' sen
− ≥ ⋅ α ⇒ − ≥ α ⇒
≤ − α ⇒ ≤ α ⇒ ≥α
1 1 1 12 20
2y 2z ' z z ' zsen sen
= < = ⇒ <α α

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
(c) desplazamiento en la talla:La línea media de la herramienta se desplaza una cantidad +xmhacia el exterior de la circunferencia primitiva.
Como y :
Como para poder cortar debe ser x<1:
Esta talla se llama talla a +V
Procedimientos de talla para evitar la penetración
b
b
r xm m r cosr (1 x) m r cos+ − ≥ α ⇒
⇒ − − ⋅ ≥ α
2rmz
=
br r cos= α
2 2
2 22
2r 2(1 x)r (1 x) r cos 1 cosz ' z '
2(1 x) 2(1 x) 2(1 x)1 cos sen z 'z ' z ' sen
−− − ≥ ⋅ α ⇒ − ≥ α ⇒
− − −≤ − α ⇒ ≤ α ⇒ ≥
α
La herramienta SI está normalizada
1 1 1 12 20
2(1 x) 2z ' z z ' zsen sen
−= < = ⇒ <
α α
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Cálculo del factor de desplazamiento en ruedas talladas a V
Según se ha visto
Se sabe, sin embargo, que en la práctica se puede trabajar con un número límite de dientes inferior al calculado, por lo que se toma:
2
1 12
1 1 1 1
1 12
2(1 x) senz ' (1 x) z 'sen 2
z ' z ' z z 'x 1 12 z zsen
− α= ⇒ − = ⇒
α−
= − = − =
α
14 z 'x17−
=

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Ruedas talladas a cero y ruedas talladas a V
Atendiendo a la forma en que se realiza la talla, las ruedas se clasifican en:
RUEDAS A CERO (rueda normal): la línea media de la herramienta de talla es tangente a la circunferencia primitiva de referencia
RUEDAS A V (con desplazamiento): la línea media del perfil de referencia se desplaza respecto a la circunferencia primitiva una cantidad V=mx, contada positivamente hacia el exterior (rueda V+) y negativamente hacia el interior (rueda V-)

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Montaje de engranajes
Según el tipo de montaje, los engranajes se clasifican en:
Engranajes montados a cero: las circunferencias primitivas y de funcionamiento coinciden con las de referencia.
Engranajes montados en V: las circunferencias primitivas de referencia NO coinciden con las de funcionamiento.

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
(a) engranajes montados a cero con ruedas talladas a cero:
Las dos ruedas tienen más de 14 dientes(b) engranajes montados a cero con ruedas talladas en V:
Una rueda tiene más de 14 dientes y la otra menos, y su suma es mayor de 28Se tallan las ruedas con x1=x2
(c) engranajes montados en V con ruedas talladas en V:
Los dientes de ambas ruedas suman menos de 28Las ruedas se tallan con desplazamientos diferentes
Montaje de engranajes

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
La función evolvente
Por las propiedades de la evolvente de círculo
La función recibe el nombre de función evolvente
*
b b b b
EB AB AE AP AE tgr r r r
−α = = = − = α − α
tgα − α*Ev( ) tg Ev( )α = α − α ⇒ α = α
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
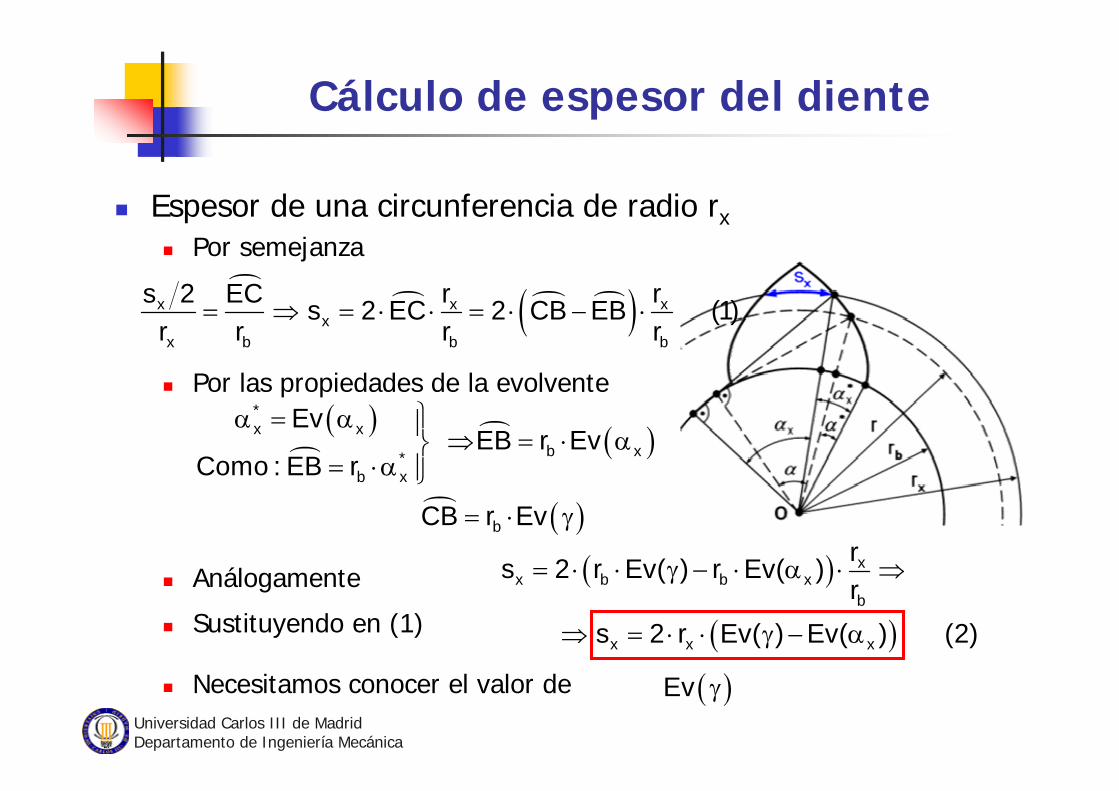
Cálculo de espesor del diente
Espesor de una circunferencia de radio rxPor semejanza
Por las propiedades de la evolvente
Análogamente
Sustituyendo en (1)
Necesitamos conocer el valor de
( )x x xx
x b b b
s 2 EC r rs 2 EC 2 CB EB (1)r r r r
= ⇒ = ⋅ ⋅ = ⋅ − ⋅
( ) ( )*x x
b x*b x
EvEB r Ev
Como : EB r
⎫α = α ⎪ ⇒ = ⋅ α⎬= ⋅α ⎪⎭
( )bCB r Ev= ⋅ γ
( )
( )
xx b b x
b
x x x
rs 2 r Ev( ) r Ev( )r
s 2 r Ev( ) Ev( ) (2)
= ⋅ ⋅ γ − ⋅ α ⋅ ⇒
⇒ = ⋅ ⋅ γ − α
( )Ev γ

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Cálculo del espesor del diente
El espesor en la circunferencia primitiva de referencia, s’, se mide en la cremallera y vale:
Aplicando la ec. (2) a la circunferencia primitiva de referencia:
Sustituyendo en la ec. (2) queda:
s' s 2 sm ms s' 2 x m tg
2 2s tg s x m tg
xm
⎫⎪= + ∆⎪π ⋅ π ⋅⎪= ⇒ = + ⋅ ⋅ ⋅ α⎬⎪
∆ ⎪= α ⇒ ∆ = ⋅ ⋅ α ⎪⎭
( ) ( )m m2 x m tg 2 r Ev Ev 2 x m tg m z Ev Ev2 2
2r mz 2xComo : m r Ev tg Evz 2 2z z
π π⎫+ ⋅ ⋅ ⋅ α = ⋅ ⋅ γ − α + ⋅ ⋅ ⋅ α = ⋅ ⋅ γ − α ⇒⎪⎪ ⇒⎬ π⎪= ⇒ = ⇒ γ= + ⋅ α + α⎪⎭
x x x2xs 2 r tg Ev Ev
2z zπ⎡ ⎤= ⋅ ⋅ + ⋅ α + α − α⎢ ⎥⎣ ⎦
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
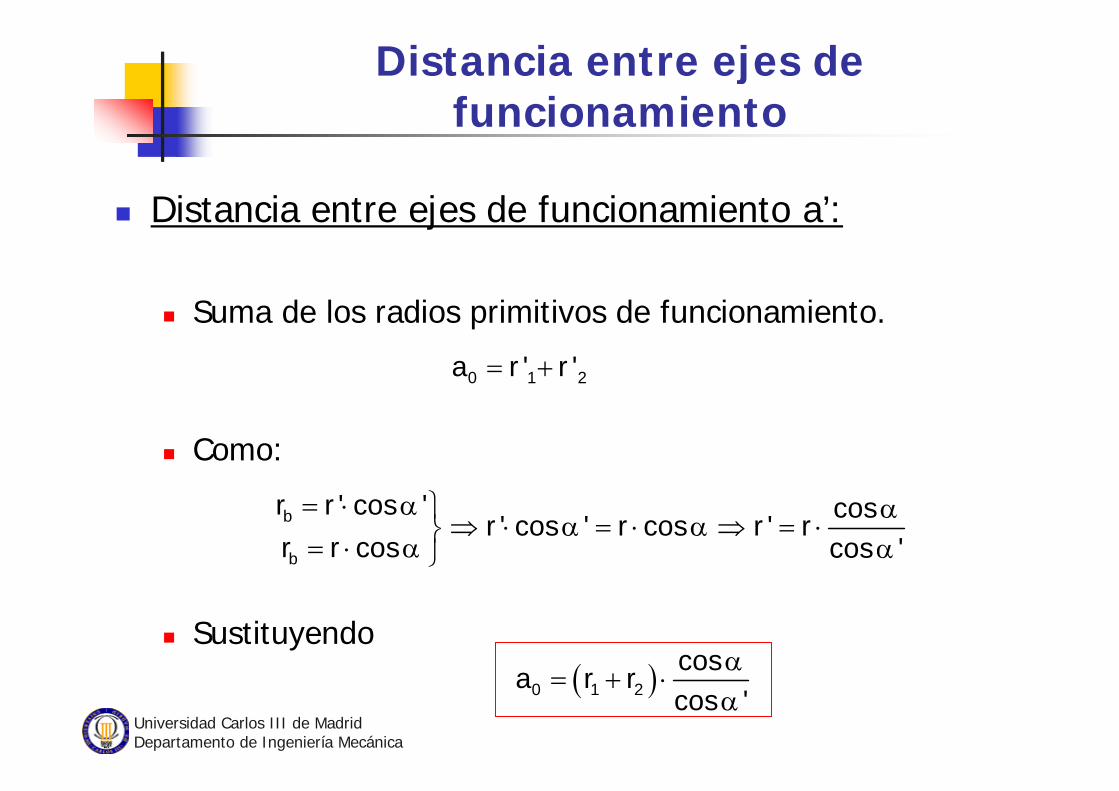
Distancia entre ejes de funcionamiento
Distancia entre ejes de funcionamiento a’:
Suma de los radios primitivos de funcionamiento.
Como:
Sustituyendo
0 1 2a r ' r '= +
b
b
r r ' cos ' cosr ' cos ' r cos r ' rr r cos cos '= ⋅ α ⎫ α
⇒ ⋅ α = ⋅ α ⇒ = ⋅⎬= ⋅ α α⎭
( )0 1 2cosa r rcos '
α= + ⋅
α
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
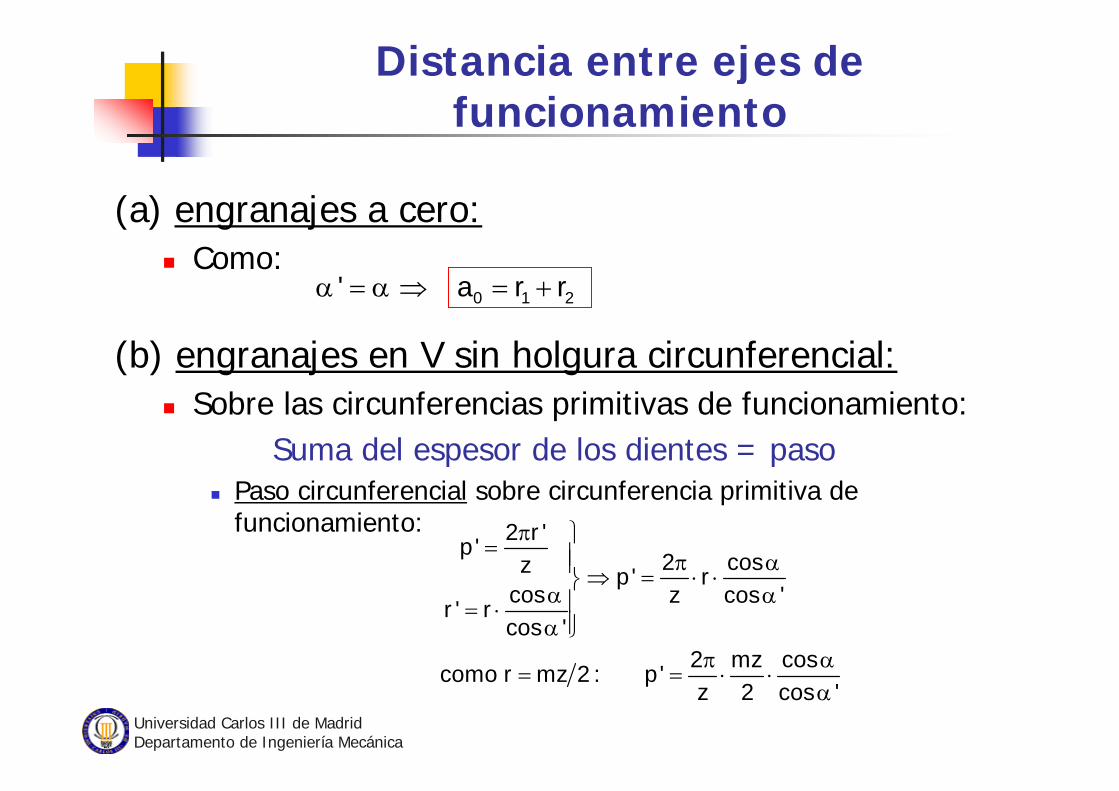
Distancia entre ejes de funcionamiento
(a) engranajes a cero:Como:
(b) engranajes en V sin holgura circunferencial:Sobre las circunferencias primitivas de funcionamiento:
Suma del espesor de los dientes = pasoPaso circunferencial sobre circunferencia primitiva de funcionamiento:
0 1 2' a r rα = α ⇒ = +
2 r 'p ' 2 cosz p' rcos z cos 'r ' rcos '
2 mz coscomo r mz 2 : p'z 2 cos '
π ⎫= ⎪ π α⎪ ⇒ = ⋅ ⋅⎬α α⎪= ⋅⎪α ⎭
π α= = ⋅ ⋅
α

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Espesor de los dientes sobre la circunferencia primitiva de funcionamiento.
Distancia entre ejes de funcionamiento
( )
1 2
2xs' 2 r ' tg Ev Ev '2z z
como :cos mz cos mz cos 2xr ' r s ' 2 tg Ev Ev 'cos ' 2 cos ' 2 cos ' 2z z
cosm 2x tg z Ev Ev 'cos ' 2
igualando p' con s' s ' queda :cos cosm mcos ' c
π⎡ ⎤= ⋅ ⋅ + ⋅ α + α − α⎢ ⎥⎣ ⎦
α α α π⎡ ⎤= ⋅ = ⋅ ⇒ = ⋅ ⋅ ⋅ + ⋅ α + α − α =⎢ ⎥α α α ⎣ ⎦α π⎡ ⎤= ⋅ ⋅ + ⋅ α + ⋅ α − α⎢ ⎥α ⎣ ⎦
+
α απ ⋅ = ⋅
α( ) ( ) ( )
( ) ( ) ( )
1 2 1 2
1 2 1 2
1 2
1 2
2 x x tg z z Ev Ev 'os ' 2
2 x x tg ' z z Ev Ev ' 0x xEv ' 2 tg Ev ' a 'z z
π⎡ ⎤+ + ⋅ α + + ⋅ α − α ⇒⎢ ⎥α ⎣ ⎦⇒ + ⋅ α + + ⋅ α − α = ⇒
+α = ⋅ ⋅ α + α →α →
+

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Distancia entre ejes de funcionamiento
(c) engranajes en V sin holgura radial:
La línea media de la cremallera de referencia de la rueda 1 coincide con la de la 2
Multiplicando y dividiendo por
como
( ) ( )( )
0 1 1 2 2
1 2 1 2
a r mx r mx
r r x x m
= + + + =
= + + + ⋅( )1 22 z z+
( )1 20 1 2 1 2
1 2
x x ma r r 2 z zz z 2+
= + + ⋅ ⋅ ⋅ ++
( ) ( ) ( )
( )
1 21 2 1 2 0 1 2 1 2
1 2
1 20 1 2
1 2
mz m x xr z z r r a r r 2 r r2 2 z z
x xa r r 1 2z z
+= ⇒ ⋅ + = + ⇒ = + + ⋅ + ⋅ ⇒
+
⎡ ⎤+⇒ = + + ⋅⎢ ⎥+⎣ ⎦
m 2r z=

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Longitud de engrane
El segmento de engrane se puede considerar como la suma de dos segmentos, unidos por el punto primitivo.
α = +acercamiento alejamientog g g
1E P 2PE

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Coeficiente de engrane ∈(grado de recubrimiento)
En un par de engranajes el ratio entre:El arco de conducción (evolvente) yEl paso (circunferencia base) p 2 r´/ z= π
b bp 2 r / z m cos( ´)= π = π α
2 1E E
2 1
b
E Ep

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Arco de conducción(circunf. Base y Circunf. Primitiva)
Es el arco girado desde el engrane y el desengrane de un diente.
Por las propiedades de la evolvente el arco de conducción es igual a la longitud de engrane.
Si el arco es medido en la circunferencia primitiva de funcionamiento r´, entonces
2 1E E
2 1E E gα=
2 1E´ E´ g / cos( ´)α= α

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Cálculo de la longitud de acercamiento
2 2 2f 2 2 2 c2 2 2g E T PT R R sen( )́= − = −ρ − α

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Cálculo de la longitud de alejamiento
2 2 2a 1 1 1 c1 1 1g E T PT R R sen( ´)= − = −ρ − α

Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Longitud de engrane. Arco de conducción
Longitud de engrane, gα: suma de las longitudes de acercamiento y alejamientoArco de conducción, : es el arco correspondiente al ángulo girado al pasar de E2 a E1
Por las propiedades de la evolvente, el arco de conducción medido sobre la circunferencia básica es igual a la longitud de engrane.Si se mide en circunferencia primitiva de funcionamiento vale:
Por semejanza de arcos:Como y queda:
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
Grado de recubrimiento o coeficiente de engrane
Por las propiedades de la evolvente, es el paso medido en circunferencia básica.Del mismo modo, también es el paso medido en circunferencia básica.
Grado de recubrimiento, ε: es el cociente entre el arco de conducción y el paso.
Tomando ambos sobre la circunferencia básica:La porción debida a la rueda 1 es:Y la debida a la rueda 2 es:
Universidad Carlos III de MadridDepartamento de Ingeniería Mecánica
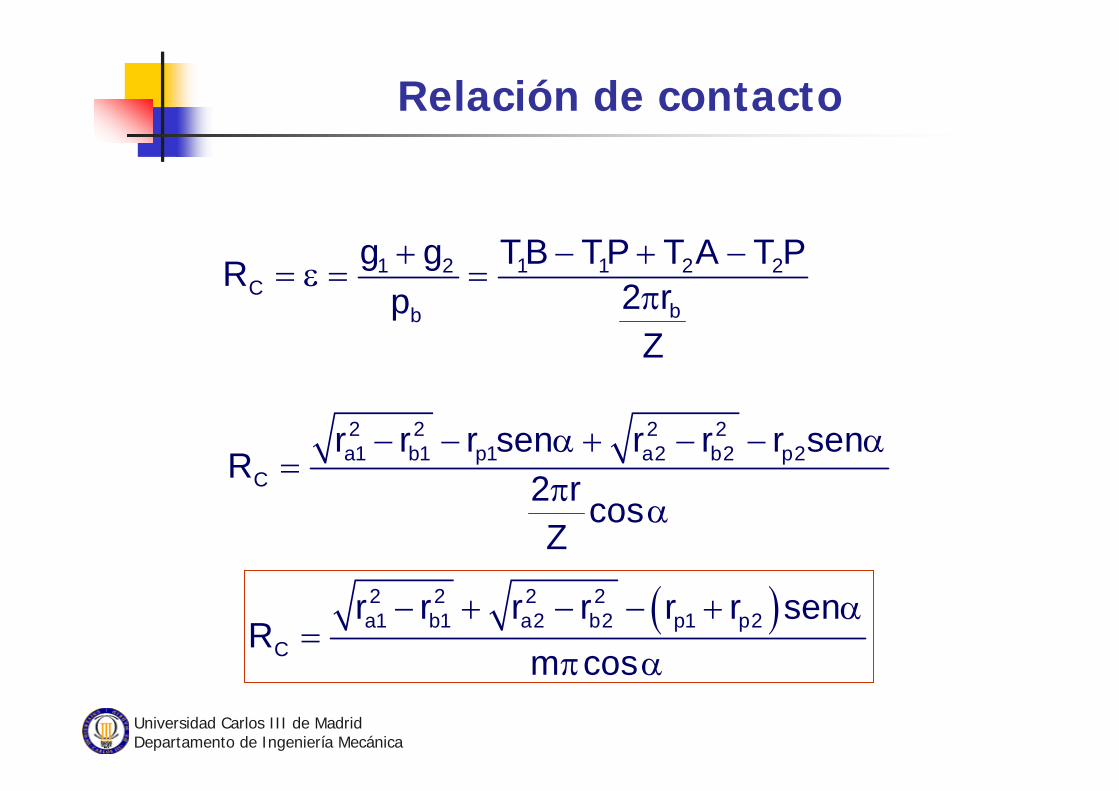
( )2 2 2 2a1 b1 a2 b2 p1 p2
C
r r r r r r senR
m cos− + − − + α
=π α
2 2 2 2a1 b1 p1 a2 b2 p2
C
r r r sen r r r senR 2 r cos
Z
− − α + − − α=
πα
1 2 1 1 2 2C
bb
g g TB TP T A T PR 2 rpZ
+ − + −= ε = =
π
Relación de contacto