tema 1 capitulo 3 analisis dinamico
DESCRIPTION
Analisis DinamicoTRANSCRIPT
Unidad 3 Análisis Dinámico de Fuerzas Objetivo: Calcular las fuerzas y torques del mecanismo conocido el movimiento ( posición, velocidad y aceleración).
3.1. Introducción
Cuando la síntesis cinemática ( hallar las dimensiones del mecanismo ) y el análisis cinemático ( hallar las posiciones, velocidades y aceleraciones del mecanismo ) han sido realizados para definir la geometría y el movimiento de un diseño particular, el siguiente paso es un análisis cinetostático o un análisis dinámico de fuerzas para determinar las fuerzas y torques en el sistema.
Estas fuerzas y torques resultan y se requieren para impulsar el mecanismo de manera que proporcionen las velocidades y aceleraciones dadas por el ingeniero. Ejemplos que requieren un análisis dinámico se ven a continuación.
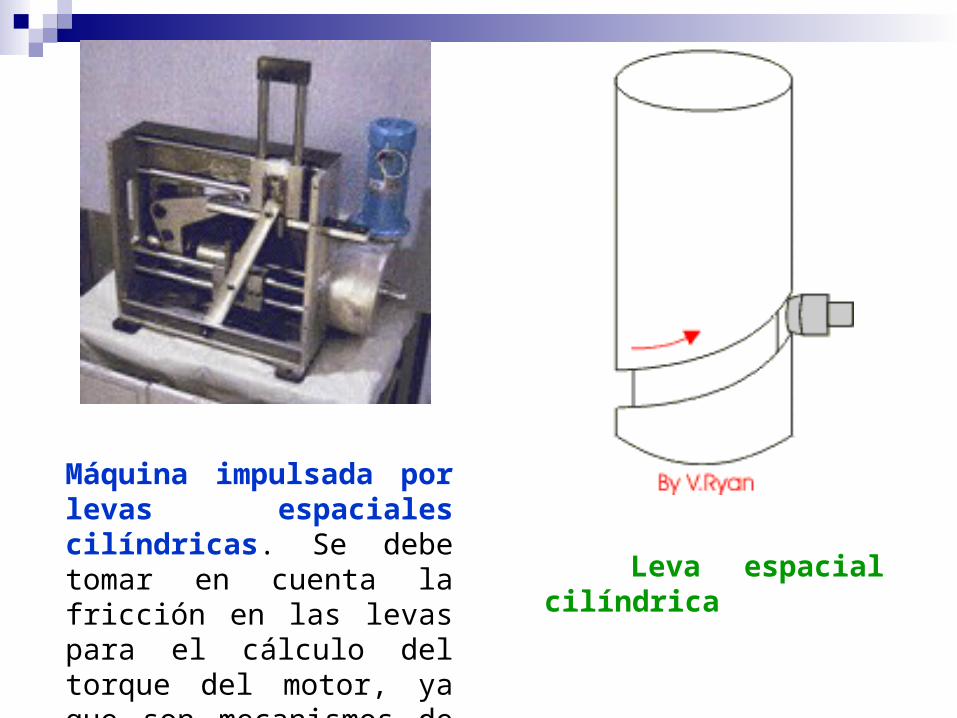
Máquina impulsada por levas espaciales cilíndricas. Se debe tomar en cuenta la fricción en las levas para el cálculo del torque del motor, ya que son mecanismos de contacto.
Leva espacial cilíndrica
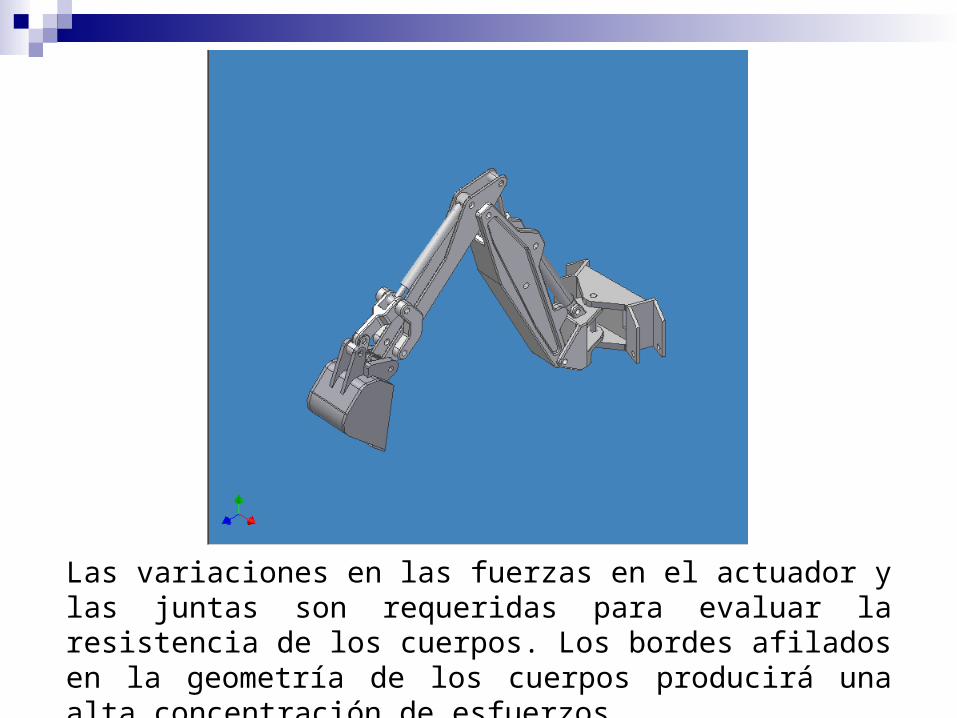
Las variaciones en las fuerzas en el actuador y las juntas son requeridas para evaluar la resistencia de los cuerpos. Los bordes afilados en la geometría de los cuerpos producirá una alta concentración de esfuerzos.
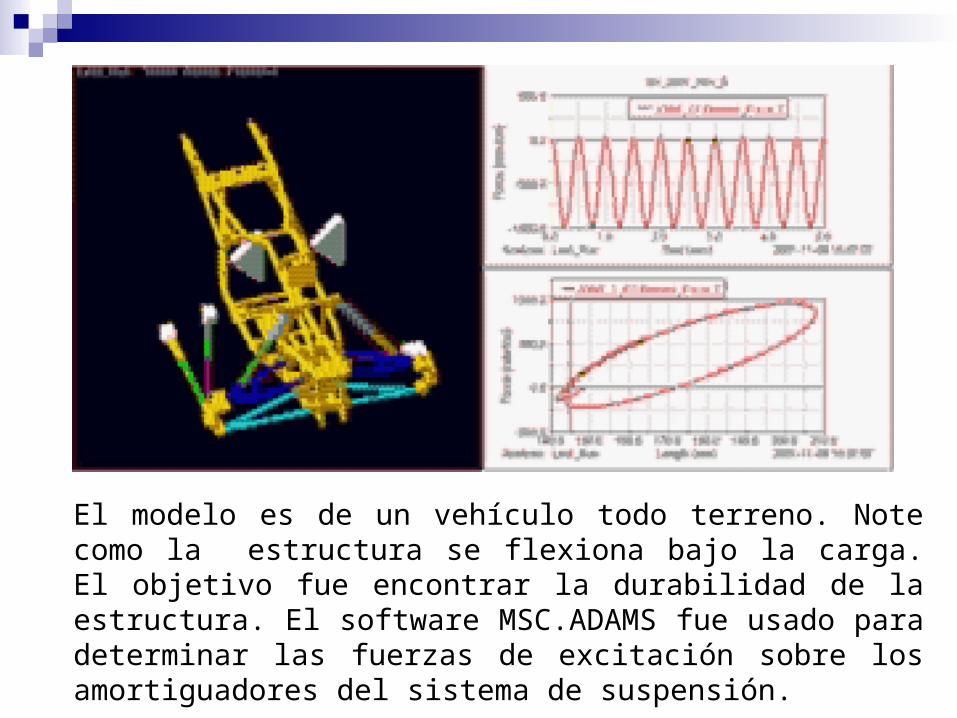
El modelo es de un vehículo todo terreno. Note como la estructura se flexiona bajo la carga. El objetivo fue encontrar la durabilidad de la estructura. El software MSC.ADAMS fue usado para determinar las fuerzas de excitación sobre los amortiguadores del sistema de suspensión.
Predicción de cargas en el chasís de un vehículo
La selección de la geometría, el material, procesos de soldadura o de unión entre partes, entre otras cosas, determinan la vida útil de un vehículo.
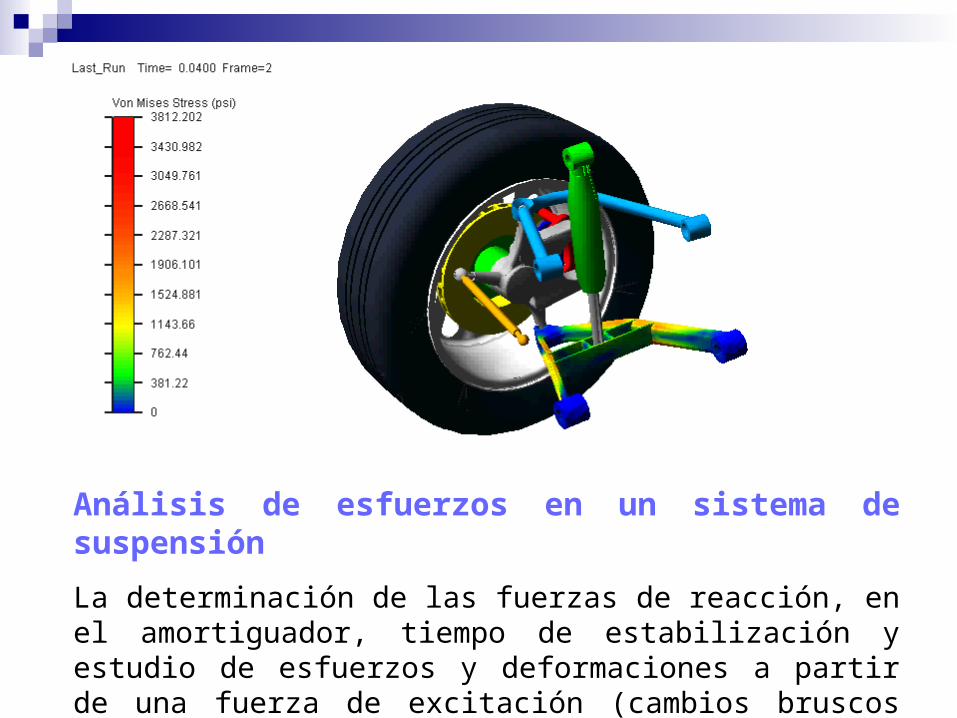
Análisis de esfuerzos en un sistema de suspensión
La determinación de las fuerzas de reacción, en el amortiguador, tiempo de estabilización y estudio de esfuerzos y deformaciones a partir de una fuerza de excitación (cambios bruscos del camino) son datos requeridos en el análisis de las suspensiones.
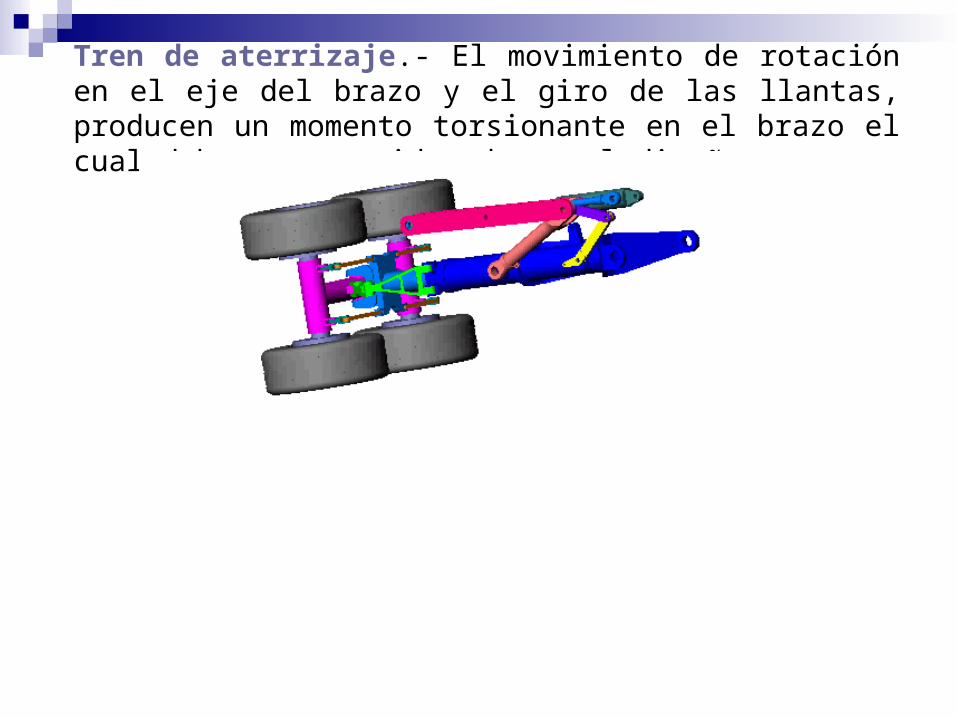
Tren de aterrizaje.- El movimiento de rotación en el eje del brazo y el giro de las llantas, producen un momento torsionante en el brazo el cual debe ser considerado en el diseño.

Ojo Ágil
Prof. Clément GosselinLaval UniversityDepartment of Mechanical Engineering


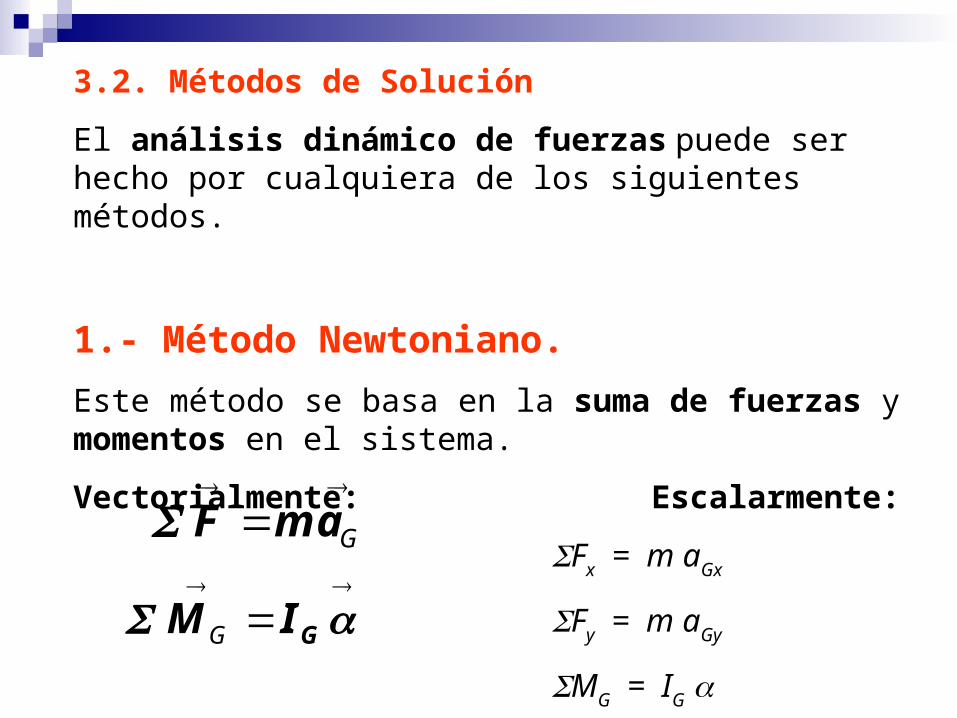
3.2. Métodos de Solución
El análisis dinámico de fuerzas puede ser hecho por cualquiera de los siguientes métodos.
1.- Método Newtoniano.
Este método se basa en la suma de fuerzas y momentos en el sistema.
Vectorialmente: Escalarmente:
Fx = m aGx
Fy = m aGy
MG = IG
GamF
GIM G
Estas tres ecuaciones deben escribirse para cada cuerpo en movimiento en el sistema, el cual conducirá a un conjunto de ecuaciones lineales simultáneas.
La solución Newtoniana es más completa, ya que proporciona información de las fuerzas en juntas, de modo que se puedan analizar juntas y eslabones para las fallas debidas a esfuerzo.
Ventaja
Suministrar todas las fuerzas internas (fuerzas de reacción) en las juntas como también las fuerza y torques externos (pistones o motores) que el sistema necesita para su movimiento. Siempre que el sistema sea estáticamente determinado.
Desventaja
Relativa complejidad en su aplicación, el cual requiere la solución simultánea de un sistema grande de ecuaciones.
2.- Métodos Energéticos Método de la Potencia (Trabajo Virtual )
Los métodos energéticos son más fáciles de implementar, pero dan menos información. Este método se basa en el concepto de trabajo.
Trabajo.- Es definido como el producto punto de la fuerza por el desplazamiento. Este puede ser positivo, negativo o cero y es una cantidad escalar.
R.FW
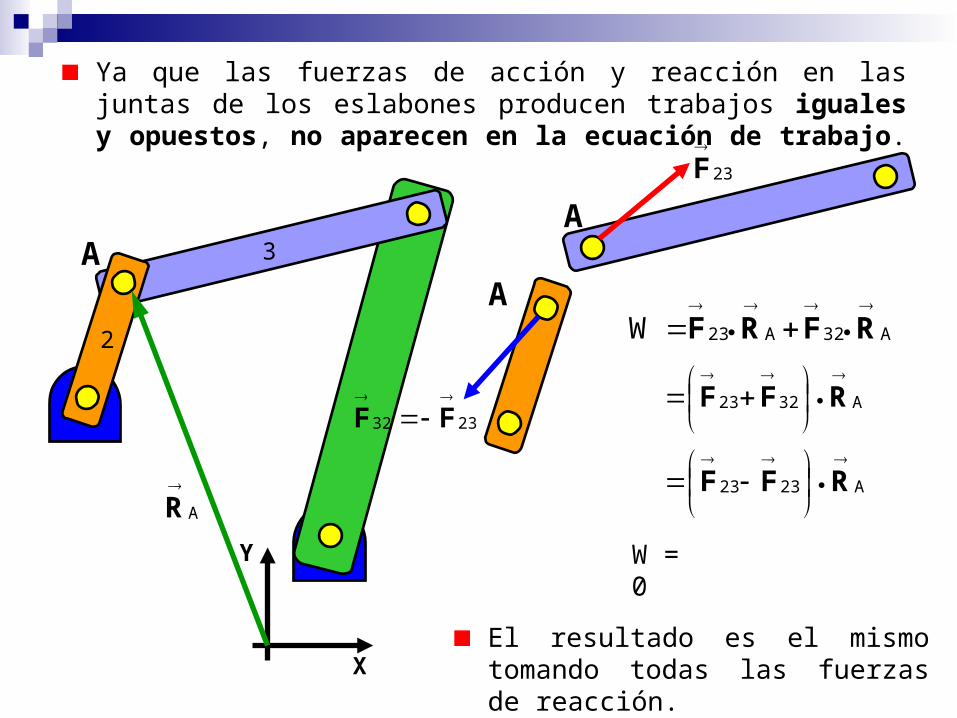
Ya que las fuerzas de acción y reacción en las juntas de los eslabones producen trabajos iguales y opuestos, no aparecen en la ecuación de trabajo.
A
AA
X
Y
2
3
A
R
23
F
2332
FF
A32A23W
RFRF
A3223
RFF
A2323
RFF
W = 0
El resultado es el mismo tomando todas las fuerzas de reacción.
El trabajo hecho por el sistema mas las pérdidas es igual a la energía suministrada.
E = W + Pérdidas
Primera Suposición
Eslabones unidos por pernos usando rodamientos de baja fricción, pueden tener una alta eficiencia, alrededor de 95% de energía transmitida. De esta manera, en una primera aproximación en el diseño de mecanismos, se puede asumir las pérdidas iguales a cero.
Por otra parte la variación respecto al tiempo de la energía y el trabajo es igual a la potencia:
dt
dW
dt
dEP
Se tiene entonces:
E = W
E = E. Potencial + E. Cinética
Analizando . La energía generada por el movimiento de los cuerpos rígidos es:
dt
dEP
E = E. Potencial + E. Cinética
Segunda Suposición
Las fuerza gravitacionales ( W= m g ) de los cuerpos, producidas por la aceleración g, frecuentemente llegan a ser muy pequeñas comparadas con las fuerzas inerciales o dinámicas ( F= ma ) producidas por la aceleración de los centros de masas a.
Por esta razón se ignoran los pesos y la energía potencial asociada a ellos y se considera solamente la energía cinética del sistema para este análisis. Es decir:
E = E. Cinética =
. 2
1 .
2
1 GGG Ivvm
CinéticaEdt
dP .
. 2
1 .
2
1 GGG Ivvm
dt
d
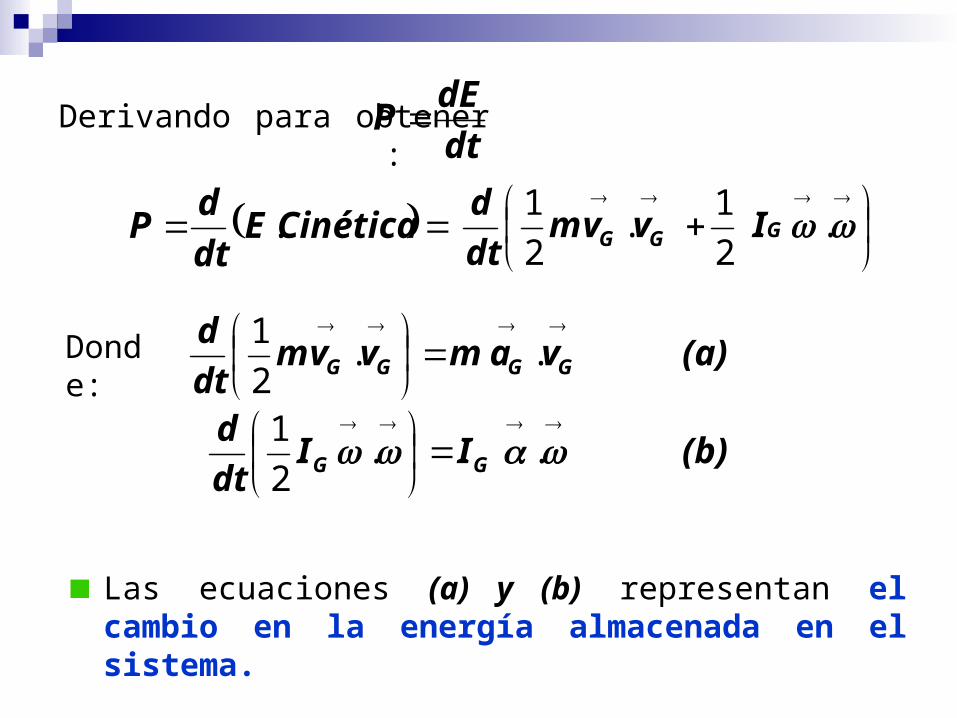
Derivando para obtener :dt
dEP
Donde: (a)vamvvmdt
dGGGG ..
2
1
(b)IIdt
dGG ..
2
1
Las ecuaciones (a) y (b) representan el cambio en la energía almacenada en el sistema.
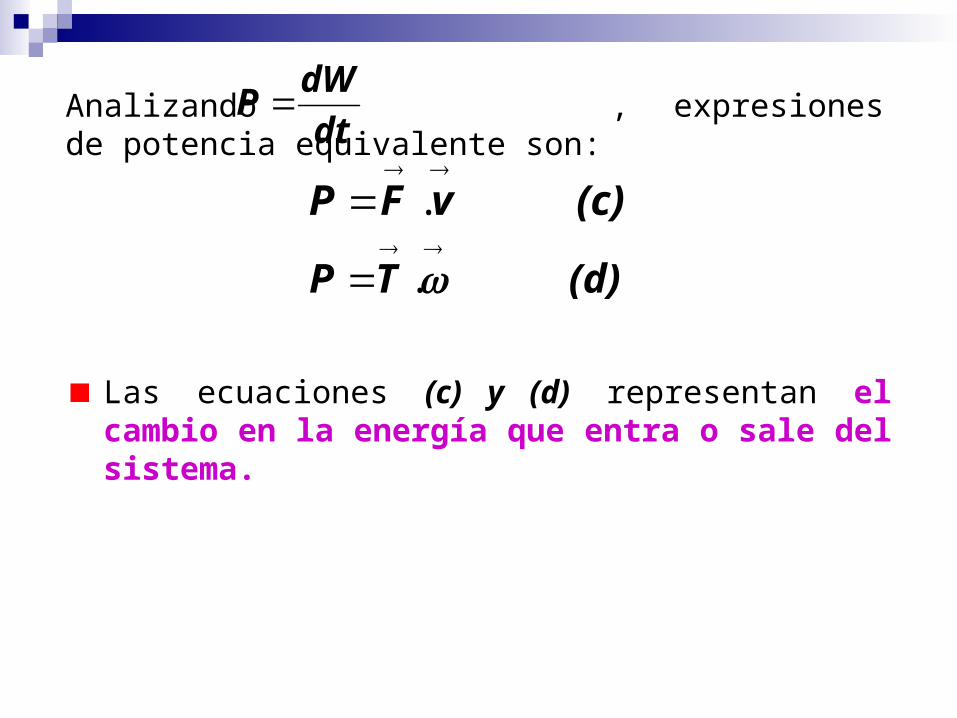
(c)vFP .
(d)TP .
Analizando , expresiones de potencia equivalente son: dt
dWP
Las ecuaciones (c) y (d) representan el cambio en la energía que entra o sale del sistema.
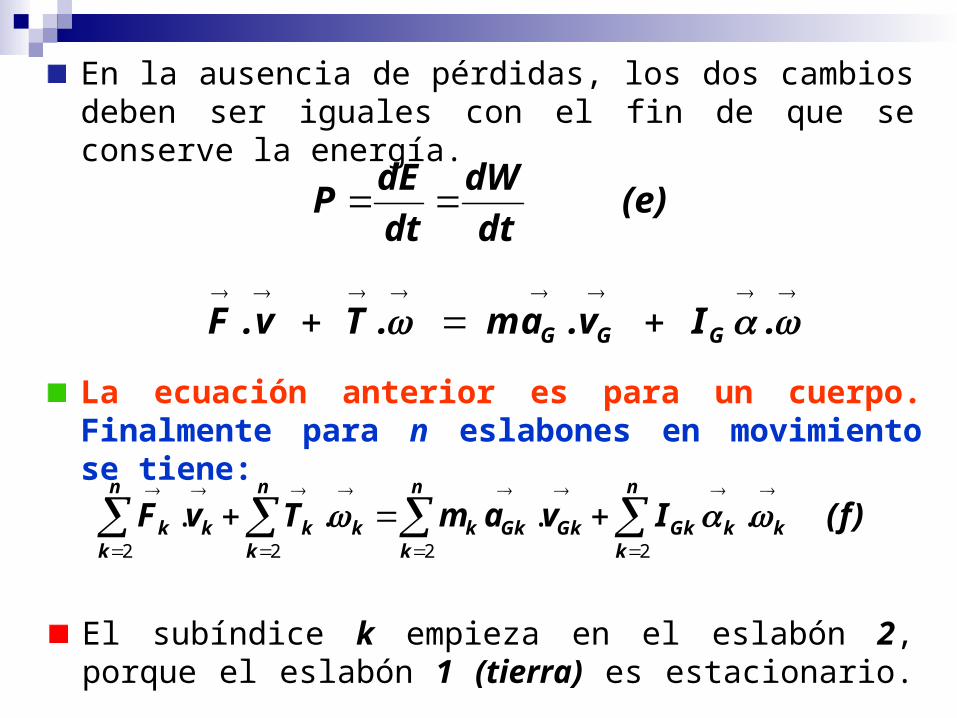
En la ausencia de pérdidas, los dos cambios deben ser iguales con el fin de que se conserve la energía.
.Iv.am.Tv.F GGG
(e)dt
dW
dt
dEP
La ecuación anterior es para un cuerpo. Finalmente para n eslabones en movimiento se tiene:
(f)IvamTvFn
kkkGk
n
kGkGkk
n
kkk
n
kkk ....
2222
El subíndice k empieza en el eslabón 2, porque el eslabón 1 (tierra) es estacionario.
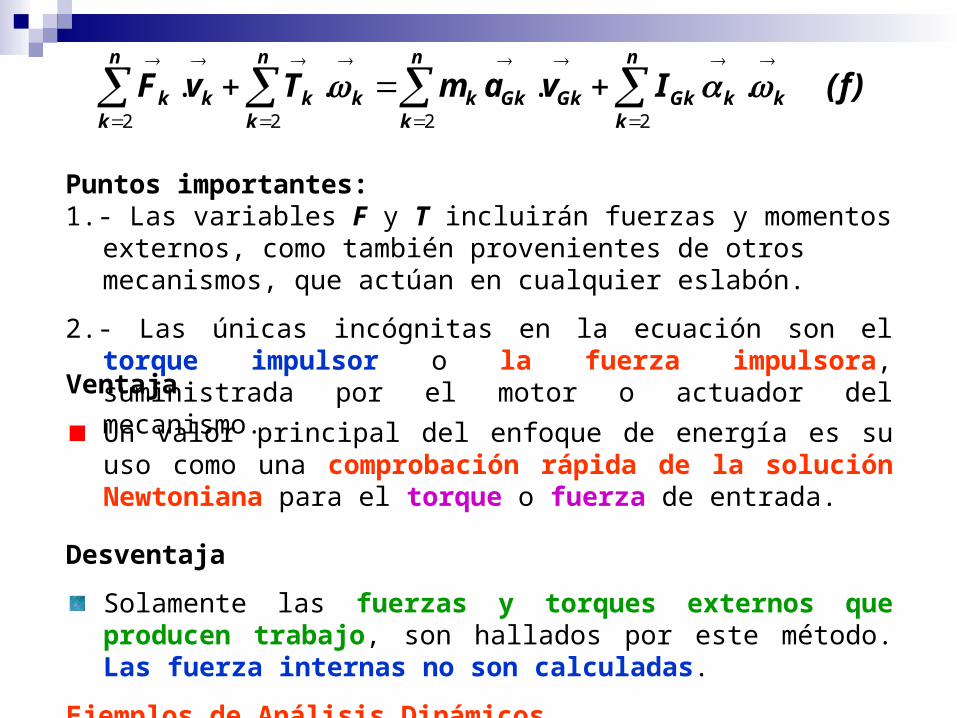
Puntos importantes:1.- Las variables F y T incluirán fuerzas y momentos externos, como
también provenientes de otros mecanismos, que actúan en cualquier eslabón.
2.- Las únicas incógnitas en la ecuación son el torque impulsor o la fuerza impulsora, suministrada por el motor o actuador del mecanismo.
(f)IvamTvFn
kkkGk
n
kGkGkk
n
kkk
n
kkk ....
2222
Desventaja
Solamente las fuerzas y torques externos que producen trabajo, son hallados por este método. Las fuerza internas no son calculadas.
Ejemplos de Análisis Dinámicos
Ventaja
Un valor principal del enfoque de energía es su uso como una comprobación rápida de la solución Newtoniana para el torque o fuerza de entrada.