soluciÓn al tratamiento de lesiones de …repositorio.itc.edu.co/bitstream/001/60/1/tesis...
TRANSCRIPT

SOLUCIÓN AL TRATAMIENTO DE LESIONES DE ESGUINCE LEVE EN TOBILLO PARA EL INSTITUTO DE RECREACIÓN Y DEPORTES DEL
MUNICIPIO DE SOACHA
JOHN JAIRO GOMEZ SUAREZ JUAN PABLO RODRÍGUEZ VELÁSQUEZ
ESCUELA TECNOLÓGICA INSTITUTO TÉCNICO CENTRAL INGENIERÍA MECATRONICA
BOGOTÁ D.C. 2017

2
DEDICATORIA
Aquellas personas que apoyaron durante toda la carrera y dedicaron tiempo para fortalecer estas metas.
PADRES
Las personas que dieron información sobre el proyecto, ampliando las bases para lograr mejores resultados.
TERAPEUTAS Y COMPAÑEROS
Finalmente a quienes llevaron el proceso de desarrollo del proyecto paso a paso para garantizar los resultados esperados y así cumplir con nuestros sueños.
ASESORES

AGRADECIMIENTOS
Primeramente a Dios por darnos la sabiduría para llevar cabo este proyecto y darnos las fuerzas para continuar afrontando cada etapa de desarrollo de nuestras capacidades, por hacernos sentir en compañía y confianza.
A nuestros padres que apoyaron desde el principio nuestros proyectos y que esperan ver reflejado su esfuerzo en la realización de este proyecto.
A los profesores que siempre nos brindaron las herramientas para enriquecer nuestros conocimientos y ver a futuro la aplicación de cada uno de ellos, en una vida profesional.
A nuestros compañeros de carrera que siempre apoyaron la realización de este proyecto y nos hicieron ver las fallas y fortalezas que existían, dando así, los caminos diferentes para buscar nuevas soluciones a los problemas para finalizar nuestro proyecto.
Finalmente a la Escuela Tecnológica Instituto Técnico Central por generar buenos profesionales, aportando las herramientas para crear conciencia y sabiduría en el campo profesional y así extender más allá nuestros sueños.

4
Nota de aceptación ___________________________________ ___________________________________ ___________________________________ ___________________________________ ___________________________________ ___________________________________ ___________________________________
_________________________________ Firma Jefe de Carrera
_________________________________ Firma jurado 1
_________________________________ Firma jurado 2
Fecha: ______________

5
RESUMEN
El objetivo de la presente investigación es describir, analizar y solucionar la problemática referente a las lesiones de esguince leve de tobillo en el instituto de recreación y deportes del municipio de Soacha, allí se evidencia la falta de métodos para rehabilitar esguinces leves de tobillo; a través de la investigación de campo se logra determinar algunos métodos de ayuda para la rehabilitación de tobillo implementadas en la actualidad, este proyecto quiere brindar una solución de tipo tecnológico que logre abarcar las condiciones más optimas de operación a este tipo de lesiones y así poder suplir las necesidades de este municipio.
Esta solución surge después de una investigación exhaustiva, del análisis de los elementos que más se necesitan para mejorar las condiciones del problema, teniendo en cuenta que el uso de las plataformas asistidas no están hechas para reemplazar al terapeuta, sino como una herramienta de apoyo; la plataforma asistida propone diversas ventajas para el uso de tratamientos terapéuticos que ayudan a optimizar tiempos, el control de los ciclos de trabajo y reducción del tiempo de rehabilitación para el paciente.
Como vistazo final el uso de la plataforma asistida en el municipio de Soacha, permite solucionar los inconvenientes que el centro deportivo refleja y a su vez, da una nueva visión a la implementación de nuevas tecnologías, como herramientas útiles que pueden ser exploradas por grupos de investigación, para adecuar la solución en diversos centros deportivos, ya que se logra evidenciar, que siempre surgen nuevas problemáticas que requieren de una investigación cada vez más profunda, pero que día a día está más orientada a la invención, innovación, desarrollo y transferencia de tecnología como línea de investigación.
Palabras clave: herramienta de apoyo, investigación de campo, plataforma asistida, esguince leve de tobillo, rehabilitación tobillo, variables.

6
ABSTRACT
The objective of the present investigation is to describe, analyze and solve the problem related to minor ankle sprain injuries in the recreation and sports institute of the municipality of Soacha, there is evidence of the lack of methods to rehabilitate minor ankle sprains; Through the field research, it is possible to determine some methods of ankle rehabilitation aid implemented today, this project wants to provide a technological solution that manages to cover the most optimal conditions of operation to this type of injuries and thus Meet the needs of this municipality.
This solution arises after a thorough investigation, analysis of the elements that are most needed to improve the conditions of the problem, taking into account that the use of the assisted platforms are not made to replace the therapist, but as a support tool; The assisted platform offers several advantages for the use of therapeutic treatments that help to optimize times, control the work cycles and reduce the rehabilitation time for the patient.
As a final glance the use of the assisted platform in the municipality of Soacha, it solves the inconveniences that the sports center reflects and in turn, gives a new vision to the implementation of new technologies, as useful tools that can be explored by research groups , To adapt the solution in various sports centers, since it is possible to show that new problems always arise that require an ever deeper investigation, but that day by day is more oriented to the invention, innovation, development and transfer of technology As a line of research.
Keywords: support tool, field investigation, assisted platform, mild ankle sprain, ankle rehabilitation, variables.

7
TABLA DE CONTENIDO
Pág.
INTRODUCCIÓN……………………………………………………………………...…11 1. Definición del problema………………………………………………………....13
1.1 Descripción del problema…………………………………………………..13 1.2 Antecedentes………………………………………………………………..15
1.2.1 Esguince de tobillo…………………………………………………..15 1.2.2 Tratamiento de esguinces ……...………………..……..………....16
1.3 Métodos para la recuperación de esguinces leve de tobillo ………..…16 1.3.1 Infrarrojos…………………………………………………………….16 1.3.2 Microondas…………………………………………………………..16 1.3.3 Tens…………………………………………………………………..17 1.3.4 Ultrasonidos …………………………………………………………17 1.3.5 Corrientes interferenciales…………………………………………18 1.3.6 Plataformas asistidas ………………….….…………………….....18 1.3.7 Ejercicios de rehabilitación para esguinces leves de tobillo...…20
1.4 Formulación del problema …………………………………………………23 2. Alcances y limitaciones …………….……..…………………………………….23
2.1 Alcances …………………………………………………………………..…24 2.2 Limitaciones ………….…...……...……...……………………………….....24
3. Objetivos…………………….…………………………………………………….25 3.1 Objetivo general……………………………………………………………..25 3.2 Objetivos específicos…………………………………………………….…25
4. Justificación ……………………………………………………………………...26 5. Marco referencial………………………………………………………………...27
5.1 Rehabilitación………………….……………………………………………..27 5.2 Kinesioterapia y kinesiología …....………………………………………....27 5.3 El tobillo humano ..…………………..…….…………..……………………27 5.4 Tipos de movimiento .…………...………………………………………... 28 5.5 Sistema biela manivela …..…..……...…………………………………....29 5.6 Mecanismo de 4 barras……….………….…………………...…...………..30 5.7 Antecedentes rehabilitadores de tobillo comerciales……….........……...30 5.8 Robot paralelo………………...….……….…….…………………………....32 5.9 Clasificación de los Robots …....….………...………..…………………….33
5.10 Plataformas asistida …...………..…….….....……...…………………...34 5.11 Aportes de los rehabilitadores en la historia……....…………………….35 5.12 Variables que intervienen en el proceso…………….…...…………...…36

8
5.13 Enfoque de implementación de los robots en el proceso de rehabilitación…………………………………………………………………..36
6. Diseño metodológico…………………..………………………………………….38 6.1 Descripción del periodo y lugar…………………………………………….39
7. Metodologías para desarrollar las tareas de cada etapa……….…..………....50 7.1 Análisis mecánico y modelación mecánica….………………………….…50 7.2 Lugar geométrico ....……..…………………..……………………………….51
7.2.1 Determinación de grados de libertad ………..……………………….52 7.3 Modelo cinemático……………….…….……………………………………..52 7.4 Análisis geométrico ………….……………….………………………………55 7.5 Análisis de cargas …………..…………………..…....……………………..58 7.6 Diseño electrónico ………...…………………….…………..………………59 7.7 Programación del sistema…………………………………………………...61 7.8 Etapa de control……………………………………...……...………………..68 7.9 Interfaz sistema de programación…….…..………………………………...74 7.10 Organización etapas…………………….…..……………………..…75
8. Parámetros para funcionamiento de la plataforma rehabilitadora …...……....76 9. Estudio de caso………………………………..………………………………..….77
9.1 Antecedentes………………………………………………………………...77 9.2 Propósito del estudio de caso……………………………………………....79
9.3 Preguntas de reflexión ………………………………………………………79 9.4 Unidad de análisis…………….................................................................79 9.5 Métodos e instrumentos de recolección de la información …….…..…...80 9.6 Métodos de análisis de la información ……..…….……...……………. 80 9.7 Documentación del estudio de caso…………………………………….....81
9.8 Mecanismos que simulan los procesos de kinesiología …..…………….84 9.9 Encuesta de indagación………………………………………………….….85 9.10 Recolección de datos y análisis de resultados ………...……...………..89 9.11 Encuesta de satisfacción del uso de la plataforma asistida………...….94
10. Resultado de Estudio de caso ……..…….…..……………………………….…95 11. Resultados y discusión………….……..….…..……..…..……………………….96 12. Conclusiones..….....……………...………………...…………………………..... 97 13. Bibliografía…….…………………..………………………………………………..98 14. Anexos …..…...…………………..…………………………………………….…101

9
LISTA FIGURAS
Pág.
Figura 1, Ejercicios de resistencia…………….………………………….……….…..20 Figura 2, Ejercicios de flexión plantar ...…….………………………………………...21 Figura 3, Ejercicios de dorsiflexión……………….……………………….…………...21 Figura 4, Ejercicios de inversión………………….…...……….…………….………...21 Figura 5, Ejercicios de eversión……………..…………………...…………….………21 Figura 6, Movimiento dorsiflexion y plantarflexion……....…...………….…...………29 Figura 7, Movimientos eversión e inversión….…………..........………….……….…29 Figura 8, Mecanismo biela manivela ..….……...………...………………..….……. 29 Figura 9, Sistema de 4 barras ...…………………….……………...…………………30 Figura 10, Robot paralelo con articulaciones esféricas ....…....……...…………….31 Figura 11, Rehabilitadores de tobillo mecanismo paralelo ...…........…..………. .32 Figura 12, Esquema de una plataforma Stewart-Gough....…....….………….……..33 Figura 13, Estadística lugares con porcentajes de lesiones de tobillo ................ 39 Figura 14, Coliseo General Santander ………..……………………….....………… 40 Figura 15, Sala de rehabilitación Coliseo General Santander ....……...………….40 Figura 16, Estadística de lesiones de tobillo 2014 ...…………………….………..….42 Figura 17, Sistema de barras mecánico ...………..……………………….………... 53 Figura18, Esquema análisis geométrico ..….…...……………….……...……..….….55 Figura 19, Plano esquemático del circuito.............……...……….………………......60 Figura 20, Placa sistema electrónico…...………..….…...………………………...….60 Figura 21, Interfaz google app inventor……………………………………….………61 Figura 22, Visualizador de proceso para plataforma asistida ….......…….…..….. 61 Figura 23, Diagrama de bloques para programación app …...………….........….. 62 Figura 24, Diagrama de flujo operación del sistema …..…..….....……...……..….. 62 Figura 25, Interfaz modo manual ……….…………,,,………………..………......….. 63 Figura 26, Interfaz modo automático y selección de modo …....………….......….. 64 Figura 27, Esquema diagrama de potencia ……...……….….……………......….. 69 Figura 28. Diagrama de flujo de interfaz ….…………..……..…………………..…. 74 Figura 29. Mapa mental de parámetros para la rehabilitación de esguince …… 76
Figura 30 Mapa mental sobre funciones de la plataforma asistida .…….........….. 85 Figura31Grafica de reducción perímetro del tobillo vs tiempo de rehabilitación.....89 Figura 32 Tonalidad de la piel para esguince leve de tobillo…………………….... 90 Figura 33 Grafica reducción hinchazón vs días de rehabilitación……..………….…91 Figura 34 Grafica grados de libertad vs días de rehabilitación ………..…...……... 91

10
LISTA TABLAS
Pág.
Tabla1, Variables del problema……...…….………………….…...…….…………....14 Tabla 2, Tabulación soluciones y variables del problema ….….……..….……..….19 Tabla 3, Rangos de movimientos del tobillo …………….…....………..………… .28
Tabla 4, Horarios de atención para lesiones en el centro deportivo General Santander ………………………………………………………………………...….. 41
Tabla 5, Sesiones para trabajar rehabilitación de esguince leve en tobillo…........44 Tabla 6, Deducción etapas de desarrollo del proyecto…………………...….....…..46 Tabla 7, Tabulación de condiciones de uso opciones de implementación...…….47 Tabla 8, Funciones de la plataforma asociado a etapas de desarrollo……………49 Tabla 9, Lista de tareas para cada etapa de desarrollo del proyecto…...……...…50 Tabla 10, Análisis de cargas .……...................................................................…. 58 Tabla 11, Opciones para rehabilitación de esguince leve de tobillo …..……….... 84 Tabla 12, Comparativo perímetro del pie y días transcurridos………….……….....89 Tabla 13, Comparativo reducción de hinchazón con tiempo de rehabilitación …..90 Tabla 14, Comparativo grados de libertad con tiempo de rehabilitación .........… 92 Tabla15, Comparativo tratamientos …………….…...…......…………………...... 93

11
INTRODUCCIÓN
En el mundo actual, la tecnología cada vez abarca más campos de acción, como el deporte, la salud, los medios de comunicación y otros más, que generan el interés de diversas personas; en el campo de la salud, existen aplicaciones tecnologías que han llegado lejos, desde equipos avanzados para observar el funcionamiento interno del cuerpo humano, hasta dispositivos diminutos que son utilizados para realizar cirugías en lugares donde el ojo común no tiene acceso. Otras aplicaciones en el campo de la salud, son los equipos para la rehabilitación de lesiones del cuerpo humano, desde fracturas, fisuras en brazos y piernas, contracciones musculares, problemas de espalda, cintura e incluso, esguinces de tobillo. Para un esguince de tobillo, los equipos son utilizados como medios terapéuticos, ya que funcionan a través de movimientos especiales que trabajan diferentes partes de la zona afectada, ayudando a una recuperación rápida y sin dolor. En algunos lugares del planeta, no se tiene el conocimiento de la existencia de este tipo de herramientas terapéuticas, un ejemplo claro se observa en Colombia, en el departamento de Cundinamarca, en el municipio de Soacha, en el instituto de recreación y deportes, en un coliseo llamado General Santander, donde se puede evidenciar una problemática referente al tema de lesiones de esguince leves de tobillo; en este lugar, se brinda un servicio para la rehabilitación de esguinces de tobillo leve, pero se evidencia que las terapias que se llevan a cabo, no se llevan de la forma adecuada, ya que no se logran generar los movimientos indicados para la recuperación de esguince, el control de la cantidad de ejercicios a realizar, la frecuencia de cada ejercicio y finalmente el tiempo de rehabilitación es muy prolongado; analizando las variables del problema es necesario plantearse la pregunta ¿Cuál es el dispositivo tecnológico para lograr la rehabilitación de esguinces leve de tobillo para un municipio como Soacha?, para ello se hace necesario indagar sobre algunos métodos que permitan llegar a una respuesta, la cual deberá estar orientada hacia una línea específica de investigación. Dentro de las líneas de investigación se puede tomar como referencia la transferencia de tecnología, ya que la hipótesis del problema, plantea el uso de algún dispositivo como posible solución, para ello, es necesario implementar la investigación de campo, la cual permite determinar algunos elementos característicos, que orientaran la investigación a la solución del problema.

12
Para llevar a cabo este proyecto, se hace necesario buscar información sobre esta problemática para indagar sobre las soluciones que se han originado y así tener una base inicial de investigación y llegar a una solución viable. Se deben tener en cuenta las variables que intervienen en el problema como lo son: tipos de movimientos para rehabilitar esguinces leves de tobillo, cantidad de tiempo para trabajar cada movimiento, la cantidad de repeticiones de cada sesión de ejercicios y finalmente la velocidad que debe tener el dispositivo durante la rehabilitación. Cada una de las variables mencionadas anteriormente entran en investigación para buscar la solución más fiable; con esta investigación se determina el uso de una plataforma asistida, la cual brindara solución a cada criterio mencionado en la problemática inicial. Se iniciara con el desarrollo de investigación y la creación del diseño de la plataforma, adaptando durante cada etapa del proceso, las posibles funciones que ayudaran a brindar la solución al problema de rehabilitación de esguince leve de tobillo. La orientación de cada función deberá estar dirigida desde una plataforma de funcionamiento, la cual, para este caso, será direccionada desde una aplicación apps que brindara la facilidad, para el uso adecuado de la plataforma asistida. Finalmente se pondrá en funcionamiento de la plataforma asistida en un paciente, el cual estará evidenciado en un estudio de caso que reflejara los resultados durante cada etapa del proceso de rehabilitación.

13
1. DEFINICIÓN DEL PROBLEMA
1.1 DESCRIPCION DEL PROBLEMA
En el diario vivir los seres humanos están propensos a sufrir lesiones ocasionadas por un mal movimiento, un golpe, la práctica de un deporte o el deterioro de los ligamentos; para ello, se hace necesario la implementación de terapias que ayuden a la rehabilitación de la parte afectada en el cuerpo. Dentro de los diversos tipos de lesiones, una de mayor influencia es el esguince de tobillo, muy usual en los deportistas, trabajadores activos o gente del común. Existen dos tipos de esguinces, el leve y el grave; el primero, refleja en el tobillo hinchazón y un dolor intenso, el cual es ocasionado por un estiramiento de los ligamentos, el segundo, se presenta cuando los ligamentos están desgarrados y el dolor es extremo. En el municipio de Soacha, en el instituto de recreación y deportes, existe como sede de entrenamiento, el coliseo General Santander; en este lugar muchas personas van a entrenar diferentes tipos de deportes. En las instalaciones se encuentra un espacio que tiene como función el tratamiento de lesiones de los deportistas, dentro de los tipos de lesiones que más frecuencia se presentan, son los esguinces de tobillo, algunos leves otros graves. Para las lesiones de esguince grave se les pide a los deportistas acudir a un centro especializado para curar este tipo de lesiones, ya que esto, solo se puede llevar a cabo con terapias intensivas y de manera personalizada, con equipos especializados y gente profesional que tenga en cuenta las etapas de evolución de la lesión; para las lesiones de esguince leves, se cuenta con una persona que realiza terapias, esta persona no cuenta con herramientas de apoyo para el tratamiento, un control de los tiempos y una rutina especifica de ejercicios que garanticen en el paciente una mejoría optima; todo esto ha originado una problemática para los deportistas de este municipio, los cuales están cansados de recibir un mal servicio, recuperaciones prolongadas y el gasto elevado en terapias fuera del municipio. Este problema lleva varios años sin tener una solución inmediata, los usuarios no presentan mejorías en periodos cortos y no se evidencia que las terapias se puedan llevar a cabo implementando los ejercicios correspondientes que ayuden a un mejor proceso de rehabilitación. Ya teniendo las diferentes variables que interfieren en esta problemática, se debe analizar las condiciones que se deben tener en cuenta para la rehabilitación de

14
tobillo y cuál puede ser una posible solución a esta problemática, para ello se le pregunta a la persona que lleva las terapias, cuáles serían las variables que considera a tener en cuenta para mejorar esta problemática y que posibles soluciones conoce, para lo cual se establece la siguiente información:
Tabla 1. Variables del problema
VARIABLES DEL PROBLEMA
POSIBLE SOLUCION 1 POSIBLE SOLUCION 2
Tipo de movimientos para rehabilitar un
esguince leve de tobillo
Buscar una máquina para ayudar al paciente a ejecutar movimientos de flexibilidad.
Buscar un dispositivo tecnológico que ayude a
orientar los ejercicios para rehabilitar un esguince de
tobillo. Frecuencia de
aplicación de los ejercicios
Llevar un conteo de la cantidad de movimientos a trabajar en forma escrita.
Tener un dispositivo que lleve la cantidad de ciclos de trabajo en forma digital.
Tiempo de implementación de
cada ciclo de terapia
Llevar conteo de los ejercicios con un cronometro durante
cada ejercicio.
Programar un dispositivo que regule el tiempo de
cada movimiento a realizar. La velocidad de cada
movimiento Iniciar con movimientos leves e ir aumentado la intensidad.
Regular la velocidad por medio de algún dispositivo
tecnológico. Posición adecuada para
cada terapia. Buscar información y realizar los ejercicios de rehabilitación según fuentes de información.
Buscar un dispositivo que oriente la ubicación del pie para rehabilitar un esguince de tobillo y pueda llevar la
terapia. SOLUCIÓN 1 Establece una solución por medio de alguna maquina la cual deberá ser manipulada por el terapeuta, el cual debe llevar el registro de cada sesión en forma autónoma, para determinar si hay mejorías. El control de los movimientos, los ciclos de trabajo y tiempos de las terapias, deben ser llevadas por el terapeuta o una persona que esté pendiente de estas variables. La información del proceso terapéutico debe registrarse para llevar un mejor control de cada terapia.

15
SOLUCIÓN 2 Un dispositivo tecnológico puede incluir alguna programación de los movimientos para rehabilitar esguinces de tobillo según criterios terapéuticos. Con un visualizador digital se puede llevar el conteo de los ciclos de cada terapia en tiempo real, mientras se están ejecutando. Un regulador de velocidad en un dispositivo tecnológico diseñado para realizar terapias de rehabilitación de esguinces, puede trabajar según parámetros establecidos por un terapeuta que manipule el dispositivo. La forma del dispositivo debe tener una ergonomía que permita ubicar al paciente en la forma adecuada para poder llevar a cabo las terapias de rehabilitación. Según las soluciones planteadas, una máquina de ejercicios como lo muestra la solución 1, puede ser una posible solución para llevar el proceso de rehabilitación de esguinces de tobillo, el seguimiento a cada terapia debe ser más detallado a la hora de implementar esta solución. La solución numero 2 muestra una solución más viable al ser un dispositivo tecnológico programable, el cual permite llevar un control de las variables necesarias para rehabilitar un esguince de tobillo, evitando que el terapeuta sea quien dirija la terapia de rehabilitación y dejando todo el proceso de rehabilitación en forma automática a través de la dirección de los ejercicios de rehabilitación en tiempos determinados por medio de una interfaz manipulada por el terapeuta. Esta solución puede funcionar como apoyo a los terapeutas, ellos necesitan la toma de datos mientras se lleva a cabo el proceso de terapias con los pacientes y un seguimiento de los movimientos de rehabilitación sesión a sesión. 1.2 ANTECEDENTES
1.2.1 Esguince de tobillo
Las lesiones del tobillo son muy frecuentes en la práctica deportiva y durante las actividades de la vida diaria. Las lesiones por inversión de los ligamentos externos del tobillo son las más frecuentes en deportes como el baloncesto y el fútbol, y suponen el 40 % del total de las lesiones de los deportistas [11].
16
1.2.2 Tratamiento de esguinces
El objetivo primario del tratamiento, es evitar el edema que se produce tras la lesión. La aplicación de hielo es básica en los dos o tres primeros días, junto con la colocación de un vendaje compresivo. Si hay dolor al caminar, debe evitarse el apoyo usando unas muletas para evitar aumentar la lesión. Dependiendo de la severidad de la lesión, una férula o un yeso pueden ser efectivos para prevenir mayores daños y acelerar la cicatrización del ligamento.
La movilización del tobillo (flexión y extensión) y trazar círculos con el pie (hacia fuera y hacia dentro), pueden ayudar a reducir la inflamación y previenen la rigidez.
1.3 Métodos para la recuperación de esguinces leves de tobillo
1.3.1 INFRARROJOS
Características: Es la más sencilla, no pudiéndose considerar como una corriente al uso. Su estructura consiste en un equipo eléctrico compuesto de un reflector y un casquillo en el cual se sitúa la bombilla infrarroja. Su escasa complejidad, suele provocar en los pacientes desconfianza acerca de su eficacia, equipos bastante grandes y costosos.
Efectos: Su efecto es el de proyectar radiación calorífica en una zona determinada, con los beneficios que ello comporta. Se suele emplear para calentar la zona afectada antes de la realización del masaje. Al igual que otras fuentes de calor, provoca analgesia y tiene acción descontracturante, es decir funciona como un masaje manual en la zona contraída.
Modo de empleo: El procedimiento tipo es tan simple como su mecanismo, la lámpara debe colocarse a una distancia estimada de 1 metro respecto de la zona a tratar, aunque dependerá siempre de la intensidad del foco. La sensación que debe producir ha de ser confortable, evitando en cualquier caso aplicaciones excesivas que provoquen quemaduras, lo cual no suele ser habitual. Sus propiedades curativas son muy limitadas, es un equivalente a la manta eléctrica, alivia el dolor, pero no lo cura. Sólo actúa de forma superficial.[6]
1.3.2 MICROONDAS
Características: Este aparato que genera calor en zonas más profundas, presenta mayor complejidad. Su intensidad es regulable en función del tejido a tratar. Está contraindicado en pacientes con prótesis, marcapasos, embarazadas, por motivo de su funcionamiento intrínseco, al ser un sistema que transmite un tipo de ondas que recalientan los metales y pueden provocar alteraciones en la formación del feto.

17
Efectos: Principalmente calor. A diferencia de la radiación infrarroja, la sensación superficial suele ser de un calor suave, y sus efectos se perciben en zonas más internas de los tejidos siendo directamente proporcionales a su intensidad. Es una ayuda muy eficaz en la recuperación de lesiones, especialmente en las contracturas.
Modo de empleo: Se suele aplicar durante intervalos de tiempo de entre 7 y 15 minutos, colocándose a una distancia prudencial del paciente, provocando en él una sensación agradable.[8]
1.3.3 TENS
Características: Es uno de los aparatos más empleados presentándose, al igual que los demás, en diferentes modelos. Su comercialización y amplia distribución, lo convierte en un elemento muy común, pero suele producir utilizaciones incorrectas por parte de los usuarios no profesionales.
Efectos: Provoca una sensación de hormigueo, un ligero calambre. Actúa sobre las fibras nerviosas que tiene nuestro cuerpo para transmitir la sensación de dolor, inhibiendo esa sensación molesta. Un aparato de gama alta puede resultar muy útil para tratar el dolor de una zona determinada, siendo sin embargo sus efectos muy reducidos en caso de elegir un modelo de gama baja Su función principal es la de analgesia de dolor.
Modo de empleo: Por sus características el tiempo de empleo puede ser casi ilimitado, aunque si se extiende demasiado, se va perdiendo la sensación de hormigueo. El tiempo de empleo varía según las características de la lesión, pudiendo llegar desde 3-4 horas, hasta tenerlo puesto toda una noche.[7]
1.3.4 ULTRASONIDOS
Características: Es un aparato que produce vibraciones mecánicas, las cuales se propagan únicamente por un medio sólido o líquido. Se trata de un tipo de corriente que tiene la capacidad de actuar en profundidad.
Efectos: Sus dos acciones principales son: antiinflamatoria y antiálgica, es decir no permite la aparición de gases.
Modo de empleo: Para su aplicación se precisa de un medio que transmita la onda entre el cabezal del aparato y la piel. Se suele emplear un gel específico para este tipo de aplicaciones y, también existe la posibilidad de la aplicación en medio acuático, gracias a la capacidad del agua de transmitir con facilidad este tipo de vibraciones.

18
El tiempo de aplicación es variable lo normal es entre 4 y 10 minutos. [7]
1.3.5 CORRIENTES INTERFERENCIALES
Características: Es un aparato cuyo principio es más complejo que los anteriores basándose en el principio de despolarización de la fibra nerviosa.
Efectos: Reestructuración en los desequilibrios de tipo circulatorio. Procesos de recuperación postraumática: contusiones; esguinces;
luxaciones, analgesia, lucha contra la atrofia muscular Modo de empleo: Se necesita un aparato específico capaz de producir este tipo
de ondas, siendo su coste muy elevado en relación a los anteriormente presentados. Los tiempos de tratamiento oscilan según la patología a tratar, siendo la media de 10 a 20 minutos.[6]
1.3.6 PLATAFORMAS ASISTIDAS
Características: implementan el uso de mecanismos que permiten recrear los movimientos terapéuticos necesarios para tratar los esguinces de tobillo, utilizan programación de ciclos de trabajo en tiempos determinados y generan una mayor profundidad en el tema de recuperación del esguince de tobillo por terapias de contacto; existen mecanismos de asistencia remota que no son de elevados costos.
Efectos: puede generar ampliación de la lesión del esguince siempre y cuando no cumpla los requisitos básicos como la generación de los movimientos correspondientes y los tiempos de uso para cada ejercicio según las condiciones que exija la terapia.
Modo de empleo: consiste en una plataforma donde se apoya el pie, esta plataforma genera los movimientos necesarios para la terapia en intervalos de tiempo para lograr un calentamiento de la zona afectada y una adecuación del cuerpo al dolor y reducción de la hinchazón.[5]
Con la información de los antecedentes se iniciara una investigación de las opciones, para determinar si alguna de estas opciones puede brindar una solución a la problemática que posee el instituto de recreación y deportes en el Coliseo General Santander, respecto al tratamiento de esguinces leves de tobillo, teniendo en cuenta las variables mencionadas en la Tabla 1.

19
Tabla 2. Tabulación soluciones y variables del problema
Solución Ventajas de implementación para el instituto de recreación y
deportes
Desventajas de implementación para el instituto de recreación y
deportes
Infrarrojos El tiempo de rehabilitación es reducido, ataca la zona afectada directamente sin necesidad de tener que ejecutar movimientos bruscos.
No requiere de algún mecanismo de apoyo para funcionar eficientemente.
La implementación de esta solución es muy costosa para el instituto, se requiere de personal calificado para su manipulación.
Consume una gran cantidad de energía lo que genera elevación en los gastos al ser usado.
Microondas El método de rehabilitación ayuda al proceso de rehabilitación tiempos cortos, logrando resultados óptimos. Genera un calor leve lo que no genera dolor durante el proceso de rehabilitación.
Son equipos de dimensiones grandes, lo que genera una ampliación del espacio actual en el instituto de recreación y deporte. Equipos con costos elevados y la desventaja de consumir energía en cantidades, lo cual no podría sustentar el instituto.
Tens Utiliza impulsos magnéticos como terapia logrando atenuar el dolor del paciente, es de uso casi ilimitado, logrando tener una eficiencia de uso.
No requiere de grandes espacios y su manipulación es de fácil acceso.
Este método requiere de mantenimiento constante, un mal uso en el tiempo de utilización puede generar daños severos en los nervios de la sección afectada.
Ultrasonido Este método de rehabilitación no genera dolor en la zona afectada, requiere de equipos especializados que ayudan a no dañar el sentido del oído tanto para el paciente, como el terapeuta.
No generan hinchazón en la zona afectada.
Esta solución es de costos elevados para el instituto de recreación y deportes, requiere de un espacio acoplado para evitar filtraciones por ruido, lo cual requiere de un espacio diferente para ser implementando.
Requiere de un gel para poder llevar a cabo el tratamiento lo que aumenta el costo del proceso de rehabilitación.
Corrientes interferenciales No requiere de grandes espacios, es un método que no genera dolor a la hora de su implementación y no genera hinchazón en la zona afectada.
Requiere de un espacio adecuado para ser utilizado, puede generar problemas de tipo circulatorio. El costo de este método es elevado y los tiempos de utilización son grandes lo que prolonga la rehabilitación del tobillo.
Plataformas asistidas Estos dispositivos son económicos y muy utilizados en el mercado, ayudan a los procesos de rehabilitación en periodos cortos, pueden ser programados para facilitar el trabajo de los terapeutas, no ocupan grandes espacios y se pueden transportar de un lugar a otro de forma fácil.
Durante su implementación pueden generar un dolor leve e hinchazón en la zona afectada.
No se utilizan para lesiones de un grado mayor ya que pueden aumentar la lesión del paciente.

20
La plataforma asistida muestra mayores beneficios, esta solución no reemplaza los beneficios de las otras opciones, pero genera facilidad en tamaño, costo y uso de implementación para las condiciones que se evidencian en el instituto de recreación y deportes.
Analizando las variables y las posibles opciones de solución para el tratamiento de esguinces leve de tobillo, la opción más clara y eficiente que abarca la mayor cantidad de variables de los problemas observados en el instituto General Santander es una plataforma asistida.
Una plataforma asistida es la solución, ya que no exige costos elevados (ver anexo 5), se puede implementar en espacios reducidos, no exige la sustitución de los terapeutas, se utiliza como un dispositivo auxiliar, puede ser programado según las exigencias de la terapia, los tiempos pueden ser coordinados para trabajar casos simultáneos con el terapeuta, no posee efectos secundarios por la generación de factores externos.
Es necesario tener en cuenta que una de las ventajas de implementar la plataforma asistida, se verá reflejada en la conexión bluetooth a través de una aplicación app, manipulada desde un dispositivo android, lo que da un manejo más eficiente y de fácil dominio para el terapeuta; su implementación genera resultados positivos que pueden ser comparados con los métodos tradicionales terapéuticos.
1.3.7 Ejercicios de rehabilitación para esguinces leves de tobillo
Resistencia: Debe iniciar los ejercicios de resistencia una vez recuperada la movilidad completa. Utilizar una banda elástica de un metro o una cámara de rueda de bicicleta. Hacer 30 repeticiones de cada uno de los ejercicios orientados por un terapeuta tres veces al día. Ver figura 1
Figura 1. Ejercicios de resistencia
Flexión plantar: Sujetar ambos extremos de la banda elástica con las manos y pasarla por debajo del pie. Al mismo tiempo que se tracción a la banda, empujar con el pie lejos del cuerpo. Contar hasta tres y repetir el ejercicio. Ver figura 2

21
Figura 2. Ejercicios de flexión plantar
Dorsiflexión: Atar la banda alrededor de la pata de una mesa y pasar el otro extremo alrededor del dorso del pie. Tirar del pie en dirección al tronco. Contar hasta tres y repetir el ejercicio.
Figura 3. Ejercicios de dorsiflexión
Inversión: Con la goma fija a un objeto estático, siéntese en una silla. Apoyando el talón en el suelo llevar el pie hacia dentro contando hasta tres en cada ejercicio.
Figura 4. Ejercicios de inversión
Eversión: Comenzando en la misma posición que en el ejercicio de inversión, pero con la banda elástica en dirección inversa, realizar movimientos del pie hacia fuera contando hasta tres.
Figura 5. Ejercicios de eversión
Se observa que ya existen 4 ejercicios específicos para la rehabilitación de esguinces leves de tobillo [12], lo que genera finalmente, la búsqueda de características que debe cumplir la plataforma asistida, para tratar el problema de lesiones de esguince en tobillo.

22
Para llevar esto a cabo se enumeran las características fundamentales que se quieren suplir con la implementación del de una plataforma asistida: Generar los movimientos de dorsiflexión/plantarflexión e inversión/eversión. Implementar una plataforma asistida como herramienta de apoyo al terapeuta
y no como la opción de reemplazo de una persona. Realizar los movimientos nombrados anteriormente en intervalos de tiempo
adecuados según necesidades del usuario. Generar cada movimiento con una velocidad establecida para evitar un
aumento de la lesión. Originar el desplazamiento adecuado del dispositivo para no lesionar el
paciente. Programación de las repeticiones de los movimientos en ciclos de trabajo,
según especificaciones dadas por el terapeuta. Soportar el peso del pie para un rango específico de trabajo. Generar una interfaz de uso factible, entre el terapeuta y la plataforma asistida,
de tal forma, que el manejo y operación de la plataforma no requiera de gente experta para poder ser utilizada.
Con esta lista de características se debe especificar concretamente que valores y rangos son necesarios para lograr la rehabilitación del esguince leve de tobillo, para ello se recopila información de cada aspecto. Los movimientos que se deben generar son claros, según parámetros terapéuticos, el número de repeticiones dependen del paciente y el criterio del terapeuta, el tiempo requerido para hacer estos movimientos se dan también de acuerdo a criterios del terapeuta, el inconveniente se basa en saber cuánto debe ser la velocidad de trabajo, como se determina el movimiento del dispositivo y cuánto debe ser el peso que debe soportar la plataforma asistida. Para determinar el movimiento de la plataforma, se tendrá en cuenta los grados de libertad que el mecanismo puede tener. Para los diferentes tipos de movimientos la velocidad promedio para cada uno es de 20 mm/sg, ya que a velocidades mayores aumenta la fricción y esto puede ocasionar un aumento considerable en la lesión. [18] Para los grados de libertad se toma un rango entre 10º y 20º grados necesarios para la rehabilitación, ya que los rangos permitidos, no deben extenderse a los movimientos máximos cuando no existe lesión, ver tabla 3, se debe tener en cuenta que para el movimiento de eversión no debe exceder a 17 º, porque se pueden desgarrar los ligamentos. [14]

23
Finalmente, según estadísticas documentadas, [19] el peso del pie para una persona que esté sentada y no genere una presión total de su cuerpo, sino de su pierna, está en el rango de los 49 Newton para niños y de 177 Newton para adultos, lo que hace referencia a una masa entre los 5 kg y los 18 kg. La longitud promedio de un pie está entre los 28 cm y 35 cm en Colombia, el cual, puede estar apoyado en áreas de 1018 aproximadamente con una tolerancia de +2% del tamaño normal. [4] Con toda esta información, se tiene una visión más global del objetivo del proyecto y cuáles son los elementos que lo componen. 1.4 FORMULACION DEL PROBLEMA
¿Cómo implementar una plataforma asistida para ayudar a los terapeutas del instituto de recreación y deportes del municipio de Soacha, en el proceso de rehabilitación de esguinces leves de tobillo?
2. ALCANCE Y LIMITACIONES Es importante tener en cuenta el alcance del proyecto, así se podrá determinar si cumple con los requisitos establecidos para solucionar el problema que se evidencia en el instituto de recreación y deportes del municipio de Soacha, ya que, se pueden generar más inconvenientes con la implementación del proyecto, lo que genera limitaciones del mismo; esta información es fundamental para realizar futuras mejoras y adecuaciones del proyecto, los cuales reflejaran un avance significativo en el campo de la rehabilitación de esguinces leves en tobillos.
2.1 ALCANCES
El proyecto podrá ser implementado como una herramienta de apoyo para terapeutas que requieran trabajar lesiones de esguinces leves de tobillo, no es una herramienta para reemplazar al terapeuta.

24
El dispositivo a implementar tiene la capacidad de generar los movimientos
de dorsiflexión/plantarflexión e inversión/eversión, durante ciclos repetitivos e intervalos de tiempo específicos, según sea la necesidad del usuario, los cuales serán verificados y supervisados por el terapeuta.
Se podrá llevar el seguimiento de cada terapia en una aplicación apps, que
llevará el registro de los tiempos para cada sesión. El proyecto podrá ser implementado para personas desde los 8 años en
adelante, sin restricciones por tamaño de los pies. El dispositivo podrá ser implementado en otros centros deportivos que
cuenten con las condiciones básicas, como lugar, tiempo y personas de apoyo que requieran del uso de esta herramienta.
El proyecto deja abiertas las opciones para futuras mejoras que beneficien el campo de la investigación.
La plataforma asistida, no requiere de grandes conocimientos o gente experta para ser manipulada, estará diseñada para que su manejo sea de fácil acceso.
2.2 LIMITACIONES
Es indispensable tener una capacitación inicial para aprender el manejo del sistema. Inicialmente, su uso puede verse afectado por falta de experiencia del terapeuta, mientras se adquiere la habilidad para trabajarlo.
El dispositivo asistido no cuenta con la capacidad para trabajar otras partes del cuerpo humano, su uso es exclusivo para tobillos.
La plataforma asistida, no cuenta con la opción de conexión a puertos del computador, lo que impide hacer cambios de programación interna; puede tomarse como una futura mejora del proyecto.

25
La plataforma no trabaja con lesiones de esguince que no sean leves, ya que, un esguince de mayor complejidad requiere de un tratamiento diferente y otro tipo de adecuaciones para su rehabilitación.
3. OBJETIVOS 3.1 OBJETIVO GENERAL Implementar el prototipo de un mecanismo asistido, que permita ser utilizado como herramienta de apoyo, para la rehabilitación de esguinces leves en tobillo, en el municipio de Soacha, para deportistas del instituto de recreación y deportes.
3.2 OBJETIVOS ESPECIFICOS Diseñar y construir una plataforma asistida para la rehabilitación de
esguinces leves de tobillo.
Desarrollar una aplicación app para celular que permita manipular la plataforma asistida por vía bluetooth.
Implementar el prototipo de plataforma asistida en el instituto de recreación y deportes del municipio de Soacha.

26
4. JUSTIFICACION
Es importante reconocer que los centros de terapias para lesiones de esguince de tobillo presentan diversos elementos como son: personal especializado, instrumentos de apoyo, espacios amplios de trabajo y otras herramientas que facilitan la rehabilitación de esguinces de tobillo. En un lugar como Soacha, para la comunidad que participa en el entrenamiento de deportes, se requiere atención en este tipo de lesiones, evidenciando la importancia de dar una solución, que garantice las condiciones óptimas de acuerdo a las herramientas que aporta el lugar, esto genera un cambio de mentalidad con el uso de tecnologías, en un lugar donde no existe un apoyo concreto para esta problemática; por esta razón, implementar una plataforma asistida mejoraría diversas condiciones, entre estas: Reducción del tiempo de rehabilitación para lesiones de esguince de tobillo
leve. (Ver anexo 10) Apoyo para el personal terapéutico, direccionando el proceso de
rehabilitación con ciclos de terapias programadas. Un aporte al centro de recreación y deporte aplicando tecnologías que más
adelante puedes ser mejoradas para trabajar otro tipo de lesiones. Control en los tiempos de cada sesión de ejercicios. Elección del tipo de movimiento a realizar en ciclos de tiempo determinado. Selección de la velocidad en la plataforma durante cada terapia, según
especificaciones del terapeuta. Comodidad de uso, por medio de una interfaz vía bluetooth, manipulada a
través de una app de celular. Elección de operación manual y automática, que permite trabajar algunos
movimientos que requiera el terapeuta.
Este tipo de soluciones tecnológicas no son evidenciadas en el instituto de recreación y deportes, por lo que implementar estas soluciones, abre nuevas opciones a las problemáticas, no solo nivel municipal, sino también a nivel nacional. Es un proyecto que brinda opciones de mejoramiento en el campo terapéutico, dejando información, que puede ser utilizada para formar nuevos cimientos de investigación.

27
5. MARCO REFERENCIAL
5.1 REHABILITACIÓN
La rehabilitación, es el proceso por el cual se recuperan las aptitudes físicas perdidas, a causa de un incidente traumático, mediante terapia física. El objetivo de la rehabilitación, es recuperar una función completa y sin limitaciones, sobre todo en el caso de los deportistas que necesitan volver al mismo nivel de exigencia física.
5.2 KINESIOTERAPIA Y KINESIOLOGIA
La kinesioterapia, es una técnica correspondiente a un tratamiento terapéutico que estudia el movimiento, la fisiología y la anatomía de la biomecánica correspondiente al cuerpo humano. Al mismo tiempo, se ocupa de tratar aquellos problemas emergentes de malformaciones, accidentes, lesiones, enfermedades, y mediante la kinesioterapia, se logra mejorar de manera terapéutica, todos estos problemas mencionados, destacándose como parte fundamental de cualquier tipo de proceso de rehabilitación. La kinesioterapia comprende todos los conocimientos de la kinesiología y surgió a partir de la necesidad de rehabilitar a las víctimas de guerra como también a las personas que sufrieron accidentes laborales o bien, que poseían algún tipo de enfermedad infecto-contagiosa.
Es importante tener en cuenta que la kinesioterapia participa de la rehabilitación provocando una mejora en las condiciones de movimiento del paciente, mediante la aplicación de una rutina leve de ejercicios físicos que estimulen el área necesitada, siempre considerando la condición, características y limitaciones de cada paciente. A través del estudio de la kinesiología, la kinesioterapia intenta reducir a la mínima expresión posible la discapacidad que presenta el paciente, potenciando todas sus capacidades. Quien lleva a cabo cualquier método de kinesioterapia es lógicamente un profesional en la kinesiología, y el mismo, suele diseñar una rutina de ejercicios específica para cada uno de los pacientes atendidos y tratados, considerando, como bien se dijo anteriormente, sus limitaciones y capacidad. [2]
5.3 EL TOBILLO HUMANO
El tobillo es una de las partes más complejas del sistema esquelético y juega un papel importante en la locomoción humana, transmitiendo fuerzas y torques a la tierra durante el andar. El movimiento del tobillo puede ser descrito por las rotaciones a través de 3 ejes, los cuales son perpendiculares a los planos anatómicos. Los términos usados para definir la dirección del movimiento pie-tobillo y los rangos estimados de movimientos en cada dirección, están dados en la Tabla 3.

28
Cabe señalar que el rango de movimiento puede variar extremadamente entre los individuos, destacando la necesidad de un sistema adaptable, el cual, puede limitar la fuerza aplicada, cuando se acerca a los límites de la unión previniendo lesiones en el paciente. (Ver anexo 10)
Tabla3. Rangos de movimientos del tobillo
5.4 TIPOS DE MOVIMIENTOS
El movimiento de dorsiflexión o flexión dorsal del tobillo, es funcionalmente uno de los más importantes para el movimiento equilibrado y fluido de todo el cuerpo en la flexo-extensión en bipedestación.
Dorsiflexión: es el movimiento que reduce el ángulo entre el pie y la pierna, en el cual los dedos del pie se acercan a la canilla. Ver figura 6. Movimientos propios del ser humano como la flexo-extensión del miembro inferior (squatting), la marcha, el salto o la carrera precisan de una óptima dorsiflexión del tobillo para conseguir un movimiento equilibrado y funcional, que garantice la eficiencia del mismo, además de la prevención de lesiones en el miembro inferior
Flexión plantar o plantarflexión: es el movimiento que incrementa el ángulo aproximado de 90º entre la parte frontal del pie y la tibia, como cuando se sube una escalera.
Eversión: Rotación externa del pie con elevación del borde externo del pie. Los músculos que participan en la eversión son: Tercer peroneo (principal), Peroneo corto, peroneo largo, extensor largo de los dedos, extensor corto de los dedos.
Inversión: Rotación interna del pie con elevación del borde interno del pie Los músculos que participan en la inversión son: Tibia anterior y tibia

29
posterior son los principales, pero también participan: flexor largo de los dedos, flexor del dedo gordo, extensor largo del dedo gordo. Ver figura 7.
Figura 6. Movimiento dorsiflexion y plantarflexion
Figura 7. Movimientos eversión e inversión
5.5 SISTEMA BIELA MANIVELA Los sistemas de biela manivela, permiten la transformación de un movimiento rotacional en uno lineal o semi lineal y viceversa. Al realizar el análisis cinemático se debe parametrizar cada componente del mecanismo.
Figura 8. Mecanismo biela manivela 5.6 MECANISMO DE 4 BARRAS

30
Es un dispositivo donde se puede analizar la cinemática mediante un mecanismo de cuatro barras, también nombrado mecanismo de Grashof. Es una cadena cinemática cuyos eslabones se encuentran cerrados por articulaciones La ley de Grashof tiene una serie de leyes que garantizan la posibilidad de giro del mecanismo.
Figura 9. Sistema de 4 barras
El soporte del mecanismo es una de las barras contiguas a la menor, la barra menor actúa de manivela y su opuesta de balancín (mecanismos de manivela-balancín). 5.7 ANTECEDENTES REHABILITADORES DE TOBILLO COMERCIALES En México, en el instituto nacional de México se desarrolló una plataforma tipo 3RSS, con articulaciones rotacionales cuyo propósito es mejorar el desempeño en el menor espacio de trabajo, ver figura 9.
31
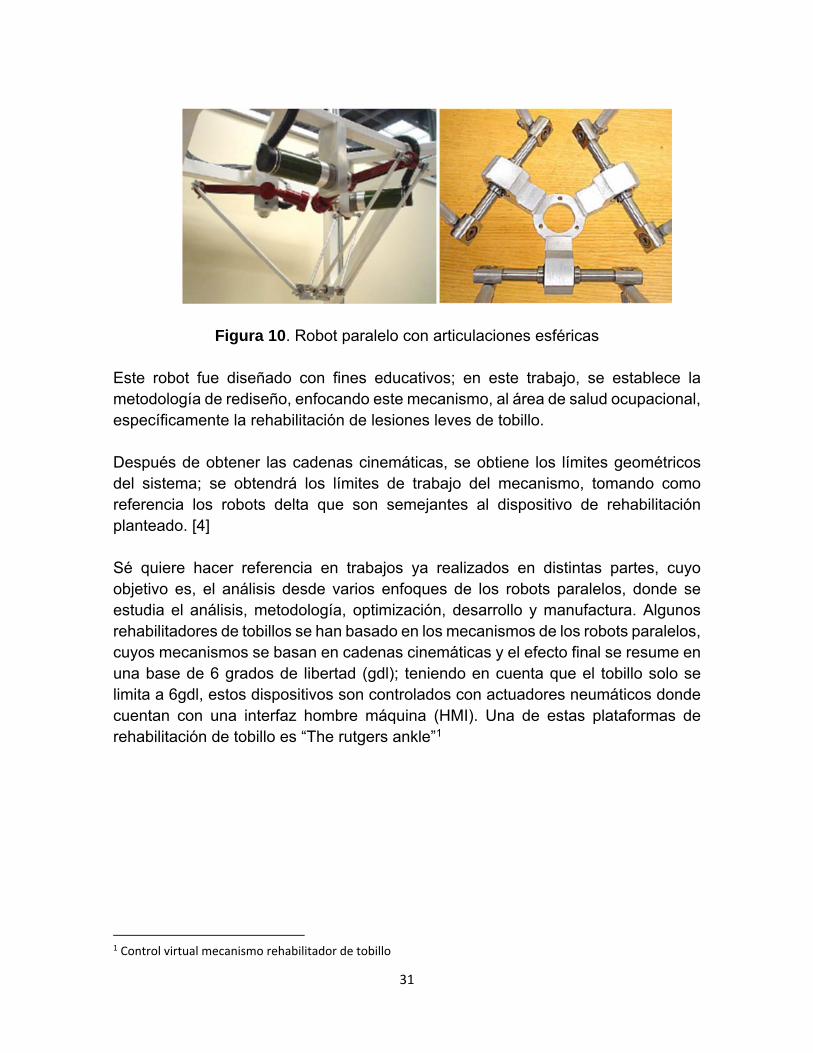
Figura 10. Robot paralelo con articulaciones esféricas
Este robot fue diseñado con fines educativos; en este trabajo, se establece la metodología de rediseño, enfocando este mecanismo, al área de salud ocupacional, específicamente la rehabilitación de lesiones leves de tobillo. Después de obtener las cadenas cinemáticas, se obtiene los límites geométricos del sistema; se obtendrá los límites de trabajo del mecanismo, tomando como referencia los robots delta que son semejantes al dispositivo de rehabilitación planteado. [4] Sé quiere hacer referencia en trabajos ya realizados en distintas partes, cuyo objetivo es, el análisis desde varios enfoques de los robots paralelos, donde se estudia el análisis, metodología, optimización, desarrollo y manufactura. Algunos rehabilitadores de tobillos se han basado en los mecanismos de los robots paralelos, cuyos mecanismos se basan en cadenas cinemáticas y el efecto final se resume en una base de 6 grados de libertad (gdl); teniendo en cuenta que el tobillo solo se limita a 6gdl, estos dispositivos son controlados con actuadores neumáticos donde cuentan con una interfaz hombre máquina (HMI). Una de estas plataformas de rehabilitación de tobillo es “The rutgers ankle”1
1 Control virtual mecanismo rehabilitador de tobillo

32
Figura 11. Rehabilitadores de tobillo mecanismo paralelo
Yoon y Ryu proponen un mecanismo paralelo rehabilitador de tobillo conformado por dos placas para soportar el pie, y así proporcionar el movimiento de flexión-extensión de los dedos. El mecanismo paralelo de 4 gdl es controlado con 4 actuadores neumáticos. Permite los movimientos de dorsi/plantarflexión y de inversión/eversión. Otro autor llamado Saglia, propone un robot paralelo para la rehabilitación de tobillo de 2 gdl, como se muestra en la figura 5. El robot es implementado para evitar singularidades, proporciona los movimientos de dorsi/plantarflexión e inversión/eversión utilizando un control PD. [5] 5.8 ROBOT PARALELO Un robot paralelo se identifica porque cada estructura que lo compone, está ubicada en una base común, lo que le da una forma particular. En general, los robots paralelos se pueden definir como un mecanismo de cadena cinemática cerrada, cuyo efecto final está unido a la base por varias cadenas cinemáticas independientes. Existe gran cantidad de robots paralelos, pero entre las más difundidas y estudiadas, está la plataforma Stewart-Gough, constituida por dos placas o plataformas (una fija y otra móvil), unidas generalmente por 6 actuadores lineales, con articulaciones prismáticas, que a su vez se ensamblan por medio de juntas esféricas y/o universales, ver figura 3, por lo que generalmente se denomina mecanismo 6 DOF-UPS (6 grados de libertad con junta universal, prismática y esférica). [3]

33
Figura 12. Esquema de una plataforma Stewart-Gough (6 DOF-UPS).
5.9 CLASIFICACIÓN DE LOS ROBOTS
En la actualidad existen una variedad de robots que poseen diferentes atributos y son implementados para diferentes funciones según sean las necesidades de los usuarios.
Dentro de la clasificación de algunos tipos de robots están:
Robots serie
Características: Este tipo de robots son implementados en la industria para trabajar en funciones que están relacionadas con la manipulación o fabricación de elementos automáticos, pueden trabajar diferentes funciones simultáneamente a través de coordenadas de posicionamiento.
Efectos de uso: poseen una restricción en los grados de libertad, requieren de un proceso de trabajo por coordenadas, son más implementados para manipular objetos de poco peso según sea el lugar de aplicación, no son móviles, lo que genera que tengan un área de trabajo delimitada, se les dificulta trabajar a grandes velocidades, poco utilizados para el contacto con los humanos.
Robot bípedo
Características: es un robot que posee una estructura de soporte por medio de patas mecanizadas, simulan el movimiento de algunos insectos y animales mamíferos, pueden alcanzar desplazamientos en campos abiertos, muy utilizados para pruebas de explosivos y transporte de objetos

34
Efectos de uso: poseen resistencia a impactos, poseen una estructura fija que posee añadido unos mecanismos que se pueden desplazar en diferentes direcciones, trabajan a grandes velocidades, muy implementados en procesos de equilibrio.
Androides
Características: robots que simulan la forma humana, pueden repetir gestos humanos, parecido a una marioneta robótica.
Efectos de uso: pueden imitar movimientos humanos, implementados para simular algunas funciones humanas, la idea de estos robots es reemplazar, con el tiempo, personas en algunas profesiones
Móviles
Características: estos robots cuentan con orugas, ruedas o patas que les permiten desplazarse de acuerdo a la programación a la que fueron sometidos. Estos robots cuentan con sistemas de sensores, que son los que captan la información que dichos robots procesan. Los móviles son utilizados en instalaciones industriales, en la mayoría de los casos para transportar la mercadería en cadenas de producción, así como también en almacenes. Además, son herramientas muy útiles para investigar zonas muy distantes o difíciles de acceder, es por eso, que son utilizados para realizar exploraciones espaciales o submarinas [10]
Efectos de uso: implementados como exploradores, pueden soportar grandes impactos, trabajan a velocidades moderadas, no tienen un sistema de manipulación de objetos.
5.10 PLATAFORMAS ASISTIDAS
Este tipo de mecanismos funcionan con algunos principios de los robots, pero no hacen parte de los mismos, cuentan con una estructura de funcionamiento específica que pueden ser utilizados para la problemática a tratar.
Características: Este tipo de mecanismos son controlados por una programación visualizada a través de una pantalla, consiste en una plataforma móvil que genera los movimientos especificados por el usuario.
Efectos de uso: pueden trabajar a altas velocidades, poseen la estructura de plataforma para transportar elementos de mayor peso, poseen un rango de movimiento mucho mayor que el tipo serial, son aplicados en temas de aviación,

35
industrial y salud, generan una mayor precisión del movimiento y pueden brindar un mayor apoyo a estructuras.
5.11 APORTES DE LOS REHABILITADORES EN LA HISTORIA
En la historia de la tecnología, sobre la rehabilitación, se evidencian antecedentes desde los años ochenta. En principio, no se consideraba que los robots industriales fueran adecuados para temas relacionados con la rehabilitación, debido a la pesadez de sus movimientos y a su historial de accidentes. A partir de 1999, investigadores de la Universidad de Tecnología y Economía de Budapest (Hungría), retomaron la idea de usar medios tecnológicos industriales estándar, para la terapia en humanos
En la actualidad existen muchos tipos de automatismos implementados, algunas empresas se dedican a la invención y adaptación de dichos mecanismos en el área de medicina.
Una de estas empresas ha desarrollado un robot cuyo propósito es la rehabilitación de pacientes con parálisis de uno de lados del cuerpo (hemiparesia espástica), esta conocida compañía plantea un sistema terapéutico llamado REHAROB, según sus fabricantes este sistema debe estar constituido por partes disponibles en el mercado, desarrollada en la plataforma de ABB; siguiendo su línea de automatismos seriales imitando un brazo humano.
En España existe un grupo de neuroingeniería biomédica, de la Universidad Miguel Hernández [13], quienes desarrollaron un robot llamado AUPA, con el propósito de brindar asistencia a la rehabilitación de miembros superiores de pacientes, cuyos problemas de movilidad, tienen origen en los inconvenientes neurológicos, este sistema cuenta con un módulo de realidad virtual, que hace interactiva la parte de ejecución de la rehabilitación, con simples juegos, que hacen divertida la sesión terapéutica. Este automatismo consta de dos brazos articulados, dotados de memorias, para poder reproducir posteriormente terapias similares.
La investigadora Alicia Casals [15] quien pertenece a la comisión científica asesora de BKC, quien es jefe de un grupo de robótica de la universidad de Catalunya, ha creado un dispositivo cuyo propósito es asistir el proceso de caminar, para personas que presenten problemas neurológicos. Este sistema está diseñado con el propósito de reducir los costos de producción; por esta razón consta de una banda caminadora donde existe un dispositivo que apoya la caminata sobre la banda, midiendo la fatiga del usuario y capaz de restringir los movimientos del mismo.

36
5.12 VARIABLES QUE INTERVIENEN EN EL PROCESO
En las diversas aplicaciones de rehabilitación, es de vital importancia garantizar el correcto funcionamiento de los mecanismos.
En el asistente para rehabilitación de tobillo, existen variables que deben ser controladas para lograr el correcto funcionamiento del dispositivo, estas variables son controladas por dispositivos, que al interactuar con el sistema, hace posible el éxito del ejercicio; algunas de estas variables son:
La velocidad de giro, el cual, se aplica al pie, en la mayoría de dispositivos es controlada mediante software, manipulando los pulsos que van dirigidos a los actuadores.
La Cantidad de movimientos que puede realizar el dispositivo debe ser acorde con los requeridos en la terapia y con los movimientos permitidos por la fisiología del pie, estos parámetros se determinan en la etapa de diseño mecánico del dispositivo, ya que estas relaciones, se solucionan realizando una programación de inclinación de la plataforma, garantizando el cumplimiento de la secuencia de rehabilitación programada por el operador.
En la totalidad de las terapias de rehabilitaciones se cuenta con el factor tiempo, este factor controla los ciclos de la terapia.
Los automatismos que brindan ayuda al terapeuta, cuentan con relojes dentro de las tarjetas de control que mantienen regulados los diversos contadores de rutinas utilizados en la terapia.
Debido a que los mecanismos son un apoyo al terapeuta, deben contar con una interfaz hombre máquina, haciendo la relación entre los parámetros introducidos por el especialista que, mediante software y las tarjetas electrónicas, es traducido a lenguaje máquina, obteniendo la combinación de movimientos deseados para el paciente.
5.13 ENFOQUE DE IMPLEMENTACIÓN DE LOS AUTOMATISMOS EN EL PROCESO DE REHABILITACIÓN
En la actualidad los desarrollos tecnológicos enfocados a la medicina, son un apoyo al profesional de la salud, cuyo enfoque es eliminar el error humano para beneficio del paciente.
Los automatismos, en el día de hoy, se encuentran diseñados para ser adaptados, al nivel que requiera el paciente. En estos sistemas se han implementado técnicas

37
como: ejercicios activos asistidos, ejercicio limitado activo, ejercicios de resistencia activa, gimnasia pasiva y el ejercicio de adaptación. Para realizar los ejercicios asistidos activos, el paciente mueve su extremidad en ruta predeterminada sin ninguna fuerza de empuje en contra. El ejercicio limitado activo, es el movimiento de la extremidad de los pacientes con una fuerza de oposición. Los ejercicios de resistencia activa, son los movimientos con las fuerzas de oposición. Estas máquinas MIT-Manus, Bi-Manu-Track y MIME, son elementos orientados a la rehabilitación, cuyo control se basa en controladores ARM estrictamente, estos sistemas hacen que el ejercicio de resistencia activa sea posible.
Varios centros médicos, alrededor del mundo, conocen de la existencia de estas tecnologías, pero el mayor uso de este tipo de sistemas se encuentra aún en los laboratorios de las universidades y centros de investigación, haciendo relevantes los grandes avances en el control de la rehabilitación. Un gran aporte, de estos dispositivos, es el control y seguimiento a la rehabilitación de cada paciente, el logrando realizar secuencias, cuantas veces fuera necesario; un gran aporte, es evitar el desgaste físico del terapeuta, agilizando la cantidad de pacientes, según la implementación de los automatismos.
El desarrollo de la tecnología debe estar ligado a la medicina con el objetivo de eliminar el error humano y garantizar una correcta rehabilitación. El enfoque tecnológico en el desarrollo de la medicina, especialmente en la rehabilitación, es de vital importancia debido a que se debe asistir a los pacientes, haciendo más personalizada la terapia.

38
6. DISEÑO METODOLÓGICO
Para iniciar el desarrollo del diseño metodológico es fundamental establecer el tipo de investigación a realizar; con el tipo de investigación que se elija se podrán dar las herramientas, técnicas y métodos e incluso las formas de cómo se analizan los datos obtenidos para llegar a las conclusiones pertinentes.
El instituto de recreación y deportes de Colombia IDRD, es el encargado de administrar las diferentes actividades deportivas en todas las modalidades, las cuales, están estructuradas en programas de enseñanza, en diferentes centros de formación por todo el país, logrando involucrar un gran porcentaje de la población de Colombia.
En el municipio de Soacha, en un centro deportivo del instituto de recreación y deportes llamado General Santander, se puede evidenciar una problemática en torno al proceso de rehabilitación de esguinces leves en tobillo, en este lugar, no se brinda el adecuado proceso de rehabilitación de esguinces leves de tobillo: se pueden evidenciar las siguientes dificultades:
Falta de elementos especializados para la rehabilitación de esguinces leves de tobillo.
Manejo de los tipos de ejercicios a tener en cuenta para rehabilitar un esguince leve de tobillo.
El control del tiempo necesario para cada sesión, en el proceso de la rehabilitación.
La cantidad de ciclos para cada sesión de rehabilitación.
Con la información recolectada se puede hacer uso de estudios exploratorios para iniciar una búsqueda de la respuesta a la problemática que allí se presenta.
En este municipio, este tipo de problemas no son muy investigados y se pueden tomar como temas de investigación piloto, que dan un enfoque nuevo al uso de las herramientas de tecnología que existen en la actualidad.
Se iniciará explicando porque se seleccionó el centro deportivo General Santander del municipio de Soacha.

39
6.1 Descripción del periodo y lugar
Se inició buscando información sobre los lugares donde las personas pueden ser más propensas a lesiones en el tobillo, aplicando el estudio cuantitativo, se elaboró una estadística de los lugares donde se evidencia las lesiones de tobillo con mayor frecuencia. [10]
Figura 13. Estadística lugares con porcentajes de lesiones de tobillo
Aplicando un estudio explicativo el cual consolida la información anterior, se puede establecer que las lesiones de esguinces de tobillo son más frecuentes en centros deportivos, lo que da una pauta a la búsqueda de centros deportivos donde se realicen tratamientos a este tipo de lesiones.
Con la información obtenida de la estadística y el acceso a la información del centro deportivo General Santander, aplicando estudios correlaciónales, se puede determinar que este lugar es el indicado para iniciar la investigación que propone el proyecto.
Las condiciones establecen que los centros deportivos reflejan mayores porcentajes en este tipo de lesiones, logrando encasillar este lugar, como el lugar indicado para llevar a cabo, la rehabilitación de esguinces leves de tobillo.
45%
20%6%
10%
14%
5%
LUGARES DE INCIDENCIA LESION DE TOBILLO
CENTROSDEPORTIVOSINDUSTRIA
HOGAR
EMPRESAS EINDUSTRIAS

40
El centro deportivo ubicado en el municipio de Soacha en la localidad 3, figura 12, cuenta con un espacio donde se realizan tratamiento para diversas lesiones, ver figura 13.
Figura 14. Coliseo general Santander
Figura 15. Sala de rehabilitación Coliseo General Santander
Ubicado el lugar, se procede a buscar información en el centro deportivo General Santander, sobre el proceso que allí se lleva, sobre el tratamiento de esguinces de tobillo y poder determinar, concretamente, cuales son las herramientas que se pueden aplicar allí para buscar una óptima solución. Buscando información sobre los tiempos destinados en las terapias, se logró consolidar la información referente a los horarios que se trabajan en el centro deportivo General Santander, consignados en la tabla 4.

41
Tabla 4.
Horarios de atención para lesiones en el centro deportivo General Santander
TIPO DE LESIÓN HORARIO DE ATENCIÓN ENCARGADO Contracturas cervicales Martes (7:00am-8:00am) Jhon Jairo Méndez
Distensión muscular cuello Martes-miércoles (1:00pm-2:00pm)
Mario Montoya
Tendones flexores y extensores de la mano
Lunes-viernes (9:00am-10:00am) Liliana Pobeda Castro
Esguince leve de tobillo Martes-jueves (2:00pm-3:00pm) Marta Lucia SuarezDistensión muscular
brazos Jueves-sábado (11:00am-12:00m) José Luis
Maldonado Contracturas muscular Jueves-sábado (10:30am-
11:30am) Juan José Contreras
Se puede evidenciar los horarios de atención para distintos tipos de lesiones, junto con la persona encargada para cada tipo de rehabilitación. El día 21 de abril de 2015, se inicio la recolección de información con la persona encargada en la rehabilitación de esguince leve de tobillo, la señorita Marta Lucia Suarez, quien no se encontraba en el lugar en el horario correspondiente. La siguiente semana, el día 28 de abril, se procedió nuevamente a la búsqueda de esta persona, logrando ubicarla y obteniendo una pequeña charla con ella; se contó con un espacio de 20 minutos para realizar una pequeña entrevista, (ver anexo 3), como parte de una investigación participativa, para obtener una descripción más detallada, de cómo se ejecuta el proceso de rehabilitación para esguinces de tobillo, ya que el objetivo clave es rectificar si existe algún problema con el proceso de estas terapias. Con la información de la entrevista, se puede evidenciar una problemática en el centro deportivo donde se realizan terapias para lesiones de esguince leve de tobillo, no se cuenta con las herramientas adecuadas para llevar a cabo los ejercicios de rehabilitación de esguinces, no hay un control del tiempo para cada sesión de trabajo, los ejercicios que aplican los terapeutas no llevan una estructura de orden , los ejercicios no son trabajados en ciclos específicos de tiempo; finalmente, las terapias no cuentan con un lugar apropiado para ser trabajadas.

42
Es necesario conocer si vale la pena implementar una solución, teniendo en cuenta la toma de datos de la cantidad de personas que sufren lesiones de tobillo por mes. Para tener una información más clara de los casos de lesiones de tobillo, se tomarán los valores de lesiones del año 2014 y se realizará una gráfica de tendencia.
Figura 16. Estadísticas de lesiones de tobillo año 2014 Se puede evidenciar un crecimiento de población con esguince en los meses de febrero y diciembre; esto proveniente al inicio y finalización de juegos deportivos anuales que dan apertura y cierre para estas fechas, lo que genera una mayor cantidad de población con lesiones de esguince; son en estas fechas donde se evidencia saturación en las terapias, sin dejar atrás que los otros meses a pesar de ser pocos los casos, no han podido ser atendidos en forma frecuente por falta de organización y recursos que permitan tratar de forma más rápida esta problemática. Como el objetivo es implementar una solución a través de un dispositivo, analizando las variables del problema y la orientación de la línea de investigación de invención, innovación, desarrollo y transferencia de tecnología, se establecerán las condiciones que este dispositivo debe cumplir para seleccionar la mejor opción posible. Entre las condiciones que el dispositivo debe cumplir son:
02468
101214161820
Cantidad de lesiones de tobillo
Cantidad de lesionesde tobillo

43
1. Lograr que el dispositivo realice los ejercicios correspondientes para la rehabilitación de esguince leve de tobillo.
2. Tener la forma ergonómica para poder posicionar el tobillo lesionado, de tal forma que se pueda llevar a cabo el proceso de rehabilitación.
3. Implementar un dispositivo que permita iniciar la rehabilitación de un paciente a través de una programación de funciones, mientras el terapeuta trabaja simultáneamente con otra persona, para aprovechar el tiempo de trabajo.
4. Llevar el tiempo de cada ejercicio durante cada terapia, con un dispositivo que lleve el control entre los ejercicios a realizar y los ciclos de trabajo.
Con estas condiciones se podría pensar en buscar un mecanismo que cumpla con algunos de los requisitos establecidos, para ello es necesario desglosar cada condición y determinar en qué consiste cada una. CONDICIÓN 1 Para identificar los movimientos que debe realizar el dispositivo y con la información consignada en el marco referencia, se realizó una visita a un centro terapéutico, para verificar cuales son los ejercicios correctos que se deben llevar a cabo, para una rehabilitación de esguince leve en tobillo. El lugar que se logró ubicar fue el CENTRO TERAPEUTICO NUEVA VIDA, ubicado en la dirección calle 85 # 10-55; en este lugar se contactó con la señorita María Paula Aragón, quien accedió a dar información sobre las terapias de esguinces leve para tobillo, detallando los siguientes datos: Existen 3 tipos de esguince Esguince primer grado: Son el resultado de la distensión de los ligamentos
que unen los huesos del tobillo. La hinchazón es mínima y el paciente puede comenzar la actividad deportiva en dos o tres semanas.
Esguince segundo grado: Los ligamentos se rompen parcialmente, con
hinchazón inmediata. Generalmente precisan de un periodo de rehabilitación de tres a seis semanas antes de volver a la actividad normal.
Esguince tercer grado: Son los más graves y suponen la rotura completa
de uno o más ligamentos, precisan cirugía. Se requieren ocho semanas o más de rehabilitación para que los ligamentos cicatricen.

44
Los del primer tipo hacen referencia los esguinces leves de tobillo, en donde estará concentrada la investigación.
Los objetivos de la rehabilitación son: Disminuir la inflamación y dolor. Impedir adherencias del ligamento lesionado. Fortalecer los músculos/ligamentos que intervienen en el movimiento del
tobillo.
Los tipos de movimientos que se deben realizar para la rehabilitación de tobillo son: Flexión plantar Dorsiflexion Inversión Eversión
Cada uno se debe realizar en ciclos constantes por sesiones establecidas, como se muestra en la tabla 5:
SESIÓN FLEXION PLANTAR DORSIFLEXION
INVERSIÓN EVERSIÓN
1 3 ciclos de 20 repeticiones 2 minutos 3 ciclos de 20 repeticiones 2 minutos 2 3 ciclos de 20 repeticiones 2 minutos 3 ciclos de 20 repeticiones 2 minutos 3 3 ciclos de 15 repeticiones 1 minuto 3 ciclos de 15 repeticiones 1 minutos 4 3 ciclos de 15 repeticiones 1 minuto 3 ciclos de 15 repeticiones 1minuto 5 2 ciclos de 10 repeticiones 30 segundos 2 ciclos de 10 repeticiones 30 segundos
Tabla 5. Sesiones para trabajar rehabilitación de esguince leve en tobillo Se debe iniciar con flexionplantar/dorsiflexion y luego con inversión/eversión para alternar los ejercicios con un intervalo de recuperación de 1 minutos. Al finalizar, el tiempo total de trabajo debe ser entre 20 minutos a 25 minutos, desde la adecuación del tobillo y calentamientos previos que se realizan, antes de ejecutar los movimientos descritos en la tabla 5. (Ver anexo 10) Con esta información se pudo establecer intervalos de tiempo correspondientes, la cantidad de ciclos y el número de sesiones a trabajar, junto con los tipos de movimiento necesarios como primera base para iniciar el proyecto.

45
CONDICIÓN 2 Para determinar la forma de que debe tener el mecanismo es necesario analizar los elementos que intervienen en el dispositivo: Es un dispositivo que debe ocupar un área mínima de trabajo, porque el centro de rehabilitación del centro deportivo General Santander es reducido. Debe contar con un soporte o plataforma que permita aguantar el peso de la pierna cuando una persona está sentada. Este debe tener las dimensiones referentes a un estudio de las dimensiones del pie humano. Deberá contar con la capacidad para manejar grados de libertad que son la clave fundamental de los tipos de movimientos para la rehabilitación, estos deberán estar en rangos establecidos para evitar empeorar la lesión. CONDICIÓN 3 Para llevar a cabo la ejecución de los movimientos a través del mecanismo en intervalos de tiempo específicos, es necesario implementar algún dispositivo electrónico programable que permita activar algún motor, para que funcione en un tiempo determinado, según sean las condiciones que requiera el terapeuta con el paciente. Este motor debe tener la capacidad de generar los movimientos del mecanismo, logrando una posición adecuada, que permita llevar a cabo los tipos de movimiento de dorsi/plantarflexión e inversión/eversión. Los datos que se deben ingresar son el tiempo y el tipo de movimiento, los cuales deberán ser visualizados por el terapeuta a través de una pantalla que ayude a rectificar que se están ingresando los datos correctos. Para ingresar los datos específicos se deberán hacer a través de un teclado que indique las opciones que necesita el terapeuta. CONDICIÓN 4 La condición 4 hace referencia a la adaptación de los movimientos realizados por el mecanismo y la programación de los tiempos de cada uno a través del dispositivo

46
programable. Se denomina control, a la etapa que une los dos procesos y permite entregar una función específica de un dispositivo. Es necesario tener en cuenta los elementos que se requieren para unir un proceso con el otro; si no se tiene en cuenta parámetros de diseño, es posible que se generen fallas en el dispositivo final. Con las características de cada condición, se puede establecer el nombre para cada etapa de desarrollo y determinar más adelante como se ejecutarán cada una.
Tabla 6. Deducción etapas de desarrollo del proyecto
CONDICIÓN ATRIBUTOS ETAPA DE
REFERENCIA 1 Establece los tipos de movimientos
a trabajar Análisis mecánico
2 Hace referencia a la morfología del dispositivo
Modelamiento mecánico
3 Relaciona un sistema electrónico y la programación de funciones
Diseño electrónico y programación del
sistema 4 Referencia al control entre la etapa
mecánica y electrónica Ensamble modelo
mecánico y sistema electrónico
programable. Determinando las etapas de diseño para el dispositivo, es necesario seleccionar el tipo de dispositivo en el cual se implementarán las etapas de desarrollo. Con la información recopilada en el capítulo de la formulación del problema, se pudo determinar que la mejor alternativa de solución para la problemática que se evidencia en el centro deportivo General Santander, es la implementación de una plataforma asistida, como dispositivo clave de solución. Se determinó en el marco referencial los tipos de automatismo que se pueden implementar como posible solución; se deben tener en cuenta las condiciones que se requieren cumplir, lo que hace necesario, recopilar la información y tabular algunas posibles soluciones, con las condiciones que se requieren para determinar la elección del tipo de mecanismo adecuado. Ver tabla 7.

47
Tabla 7. Tabulación de condiciones de uso opciones de implementación.
CONDICIÓN ROBOT SERIE PLATAFORMA ASISTIDA
ROBOT BÍPEDO
ROBOT MÓVIL ANDROIDES
1 Necesita de un sistema de apoyo para generar los
movimientos.
Puede generar los movimientos para la rehabilitación.
No tiene un sistema para apoyar el pie.
Generan movimientos de
desplazamiento y no de agarre
Puede llegar a generar mucha
fuerza para realizar los
movimientos. 2 Pueden ocupar
un espacio fijo y espacios
reducidos.
Se puede manipular con
facilidad y ocupan espacios reducidos, según la necesidad
Ocupan un área muy
grande para su
manipulación.
Necesita de un espacio amplio
para poder desplazarse
Ocupan un gran volumen, son muy
costosos de implementar.
3 Se le puede adaptar un
dispositivo que lleve el número de movimientos
realizados
Se puede programar para
generar movimientos
específicos en intervalos de
tiempo
Solo puede realizar
trayectorias y temáticas de visión artificial
Puede ser programado para
realizar desplazamientos
de lugar
Se pueden programar para
diversas funciones lógicas.
4 Se puede adaptar a un dispositivo
de tiempo.
Se puede adaptar a un dispositivo de tiempo por medio
de ciclos de trabajo.
Se puede programar
para un avance o pare
del mismo.
Se puede programar para
un avance o pare del mismo.
Puede llevar un temporizador del
tiempo de algunas funciones
que puede realizar
Con esta información se puede determinar qué tipos de robots o mecanismos no pueden ser implementados debido a que no suplen la necesidad del problema, entre ellos: Androides: ocupan gran cantidad de espacio y son costosos para su implementación.
Robot bípedo e móvil: pueden requerir gran cantidad de espacio, generan trayectorias de movimientos y se utilizan para desplazar objetos.
Robot serie: poseen limitaciones con los tipos de movimientos que puede ejercer, trabajan con poco peso y los grados de libertad son limitados por su forma y estructura.
La plataforma asistida brinda las opciones de: programación de los tiempos y ciclos de trabajo, pueden soportar grandes pesos, pueden recrear los movimientos

48
necesarios para la rehabilitación de tobillo, no son costosos para implementar a comparación de otras opciones.
La plataforma asistida suple las necesidades que se requieren abarcar en el instituto de recreación y deportes, incluye, la mayor cantidad de variables que benefician, las condiciones que posee el instituto de recreación y deportes.
Lo que genera como conclusión, que la plataforma asistida es la opción más favorable para la problemática que se evidencia en el instituto de recreación y deportes del municipio de Soacha.
Agrupando la información se puede establecer las funciones que debe realizar la plataforma asistida y la asociación de cada función a una etapa de desarrollo, para esto, se darán algunas herramientas de apoyo que permitirán llevar a cabo cada función, es decir, sin la realización de esta tarea dentro de la función la plataforma, no se puede continuar con la exploración de los métodos necesarios para implementar la totalidad del mecanismo.
Es indispensable realizar una lista de tareas que debe realizar la plataforma para cada etapa de desarrollo, estas tareas formaran la estructura de trabajo fundamental que permitirá la ejecución del proyecto en su totalidad.
Como se quiere llegar al final con la construcción de un prototipo de plataforma, es indispensable tomar cada tarea y organizarla en un diagrama de Gantt, junto con el tiempo requerido para realizar cada función, esto con el fin de llevar una estructura más organizada del trabajo y una planeación del proyecto en su totalidad.
Antes de establecer el diagrama de Gantt, se realizará una interpretación de los datos arrojados en la tabla 8.
Tabla 8. Funciones de la plataforma asociado a etapas de desarrollo
FUNCIÓN HERRAMIENTAS DE AYUDA ETAPA RELACIONADA
Generar los movimientos de
dorsi/plantarflexión e inversión/eversión.
Calculo de cinemática del robot.
Selección tipo de material a implementar
Análisis mecánico

49
Controlar la variable de velocidad para rangos específicos de trabajo.
Selección tipos de motor. Programación rango de
trabajo del motor
Ensamble modelo mecánico y sistema
electrónico programable.
Implementar los grados de libertad adecuados
para cada tipo de movimiento.
Calculo de cinemática de la plataforma
Programación motora con circuito electrónico.
Análisis mecánico
Soportar las condiciones de peso
para una pierna de una persona sentada.
Calculo dimensiones de la plataforma
Calculo rangos de velocidad.
Implementación software de diseño para mecanismos
Modelamiento
mecánico
Programación de los tipos de movimiento para intervalos de
tiempo con ciclos de repeticiones.
Creación circuito electrónico programable.
Programación de funciones para seleccionar tarea.
Implementación teclado y visualizador de funciones a programar.
Diseño electrónico y
programación del sistema
Control del mecanismo y sistema electrónico
programable
Adaptación etapa mecánica y circuito electrónico.
Implementación dispositivo de recepción de señales.
Ensamble modelo mecánico y sistema
electrónico programable.
Con la información de la tabla 8, se tiene claro que para cada etapa de desarrollo del proyecto es indispensable ejecutar una serie de tareas, que darán como resultado final, el funcionamiento completo de la plataforma asistida. A continuación se realizara un estudio descriptivo de las tareas a realizar para cada etapa de trabajo, así con esta información, se podrán establecer los parámetros necesario para que el automatismo funcione según las necesidades requeridas. (Ver anexo 10)
Se procederá a ubicar las actividades a realizar para cumplir con cada etapa de desarrollo del proyecto.

50
Tabla 9. Lista de tareas para cada etapa de desarrollo del proyecto
Etapas de desarrollo
Análisis mecánico Modelamiento mecánico
Diseño electrónico y programación del
sistema
Ensamble modelo mecánico y sistema
electrónico programable Actividades para cada
etapa
Diseño del modelo cinemático.
Diseño planos mecánicos
Cálculos diseño mecánico
Diseño modelo mecánico.
Simulación modelo mecánico.
Diseño modelo electrónico.
Realizar cálculos sistema electrónico.
Elaboración planos electrónicos.
Programación para etapa de control.
Implementación sistema de control.
Simulación de los sistemas mecánicos con el sistema electrónico.
Con la información de la tabla 9, se podrá determinar la metodología a implementar, para realizar cada tarea, en cada etapa de desarrollo del proyecto; es necesario determinar los tipos de materiales a trabajar y su implementación, para tener una visión más clara del proceso de fabricación final de la plataforma asistida.
7. METODOLOGÍAS PARA DESARROLLAR LAS TAREAS DE CADA ETAPA
7.1 ANÁLISIS MECÁNICO Y MODELAMIENTO MECÁNICO
La plataforma se encuentra diseñada de forma modular, de tal manera, que su mantenimiento sea de fácil implementación y las piezas en caso de falla, puedan ser reemplazadas sin ninguna dificultad.
Las condiciones iniciales del mecanismo están apoyadas en un diseño estructural [29]
La selección de materiales, para la construcción de la estructura, se realiza analizando el soporte de cargas directas, sobre las plataformas.
Las dimensiones del sistema están acordes a las medidas del pie humano en Colombia, que oscilan entre 25 y 29 cm de longitud y 7 a 11 cm de ancho. También se diseña basado en el peso proporcional a la pierna de cada individuo que oscila en el 10% del peso total [8]
El sistema ocupará un área de 40 x 50 cm debido a que se debe garantizar la estabilidad del mecanismo en caso extremo en donde la reacción del paciente sea un movimiento fuerte que pueda colocar en riesgo el equilibrio del mismo. El pie se apoyará en una plataforma de forma de cuadrilátero cuyo propósito de esta forma es facilitar la unión de las articulaciones sin perder el factor seguridad del paciente.

51
El sistema cuenta con tres cadenas cinemáticas que conectan la base fija con la base móvil donde se encuentra el pie soportado; Estas cadenas están compuestas por tres elementos básicos que son dos piezas de unión y un brazo de transmisión, estas tres piezas se encuentran unidas por rotulas esféricas y un pasador haciendo esta cadena flexible para poder obtener las diversas secuencias motrices.
Posteriormente, se implementan 2 servomotores caracterizados por su gran precisión, cuyo esfuerzo es relativo al peso del pie del paciente sumado al peso generado por la plataforma móvil y sus uniones; concluyendo el peso de operación aproximado que debe mover cada uno de los motores es de 19 Kg.
La velocidad de los motores será configurada por software en donde se realiza una operación de cálculo de ciclo útil, que es la recibida por la etapa de control.
Para llevar a cabo esta etapa de desarrollo, se tienen dos tareas fundamentales, ver tabla 9, entre estas tareas:
Diseño del modelo cinemático del mecanismo. Diseño planos mecánicos
Para la primera tarea se aplican los métodos correspondientes para determinar los elementos necesarios del modelo cinemático.
7.2 LUGAR GEOMETRICO
Se realiza el análisis geométrico de la plataforma, este es un punto de partida hacia la determinación del modelo cinemático de la plataforma, para iniciar, es necesario identificar las partes que lo componen y sus características básicas.
1. Base fija 2. Brazo del mecanismo biela 3. Brazo de complemento biela 4. Servomotor 5. Rotulas esféricas 6. Plataforma móvil (base para el pie)
Las bases se encuentran conectadas entre ellas por tres cadenas cinemáticas de dos eslabones unidos entre sí por medio de una conexión esférica. Las conexiones a la base fija se realizan ensamblando directamente los eslabones (mecanismo biela manivela) a los servomotores, mientras que las uniones empleadas para unirlos a la base móvil, son de tipo esférico.

52
7.2.1 Determinación de grados de libertad (GDL) La configuración de las entradas del mecanismo es determinada por los grados de libertad presentes, se pueden determinar con la aplicación de la fórmula de Chebysher Grübler Kutzbach.
1 ∗
Siendo: λ = constante: b = Cantidad de cuerpos rígidos del mecanismo. g = número de articulaciones del mecanismo. fk = grados de libertad de las articulaciones. b = 6 eslabones + 1 base + 1base móvil = 8 g = 3 rotacionales + 6 esféricas = 9 fk = 1 para rotacional; 2 para esférica = (3*1) + (6*2) = 15 Entonces: GDL = 6(8 - 9-1) + 15 = 3 Se concluye que el sistema tiene 3 grados de libertad. 7.3 MODELO CINEMÁTICO La cinemática de la plataforma estudia el movimiento con respecto a una referencia del mismo. El modelo cinemático se interesa por la descripción analítica del movimiento espacial como una función del tiempo, especialmente por las relaciones entre orientación del extremo final de referencia y las coordenadas articulares del sistema. La cinemática da solución a dos problemas fundamentales, uno es el que se conoce como el problema cinemático inverso, este resuelve la configuración que debe adoptar el robot para una posición y orientación de los extremos; el segundo problema, denominado problema cinemático directo, que determina cuál es la posición y orientación del extremo final con respecto a un sistema de coordenadas que se toma como referencia, conocidos los valores de las articulaciones y los parámetros geométricos de los elementos de la plataforma2. Para este mecanismo rehabilitador se da solución al cálculo cinemático mediante las el análisis de velocidades relativas como se muestra a continuación
2. modelos cinemáticas robots paralelos
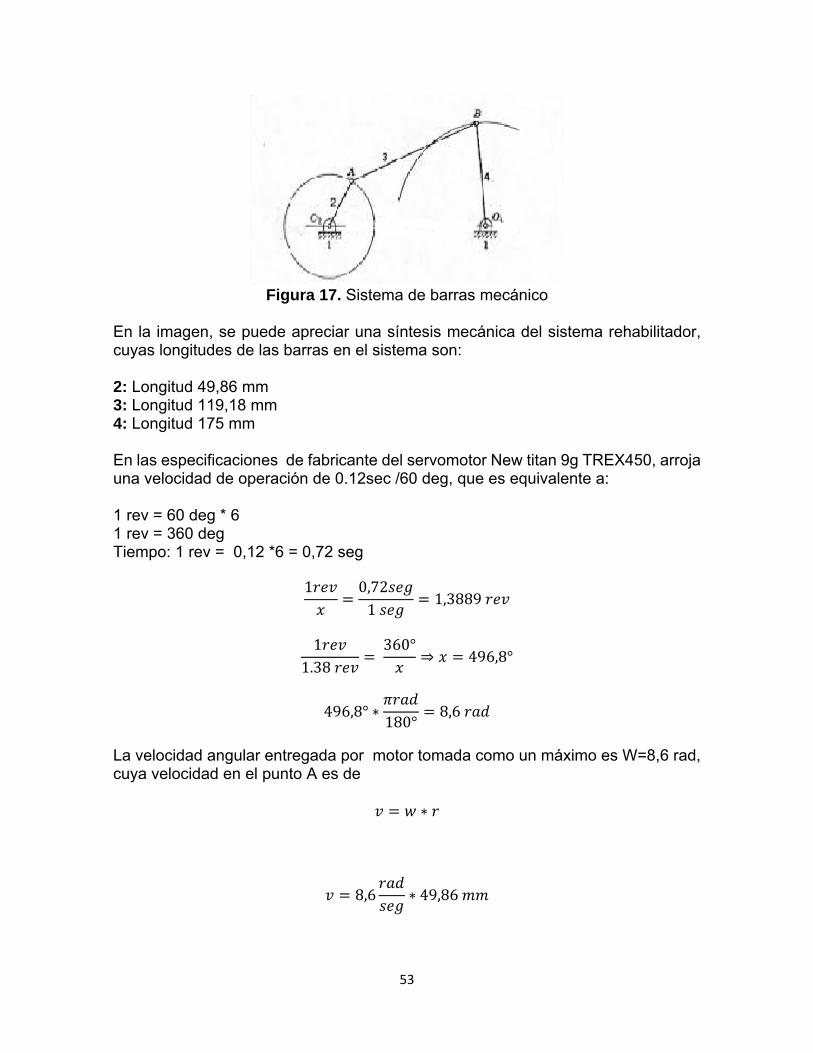
53
Figura 17. Sistema de barras mecánico
En la imagen, se puede apreciar una síntesis mecánica del sistema rehabilitador, cuyas longitudes de las barras en el sistema son: 2: Longitud 49,86 mm 3: Longitud 119,18 mm 4: Longitud 175 mm En las especificaciones de fabricante del servomotor New titan 9g TREX450, arroja una velocidad de operación de 0.12sec /60 deg, que es equivalente a: 1 rev = 60 deg * 6 1 rev = 360 deg Tiempo: 1 rev = 0,12 *6 = 0,72 seg
1 0,721
1,3889
1
1.38360°
⇒ 496,8°
496,8° ∗180°
8,6
La velocidad angular entregada por motor tomada como un máximo es W=8,6 rad, cuya velocidad en el punto A es de
∗
8,6 ∗ 49,86

54
428,80
Nombrando las ecuaciones se obtiene:
/
/ ∗ 175 175
175 119,18
428,80 175 119,16
Despejando obtenemos:
3,59 / 3,59 ∗ 175 629 /
La plataforma se encuentra diseñada de forma modular para hacer fácil su mantenimiento y posible reemplazo de las piezas, adicionalmente se encuentra diseñada en tres columnas una central y dos columnas móviles, cuando se somete el sistema a carga de 10 Kg promedio, se distribuye de manera arbitraria según el movimiento de rehabilitación, el diseño de cada columna soporta independientemente cada columna los 10 Kg logrando una sobredimensión y dando un factor de seguridad del 30% al sistema, afectando exclusivamente las cargas de compresión los cálculos se muestran a continuación tomados en el punto crítico como es la pieza acople de motor:
140
2 10
700
7.4 ANÁLISIS GEOMÉTRICO

55
En el análisis geométrico se crea una relación entre los grados de libertad del sistema y cada uno de los puntos que componen el sistema, cuya respuesta final es poder hallar un vector por punto y de esta manera poder hallar un solo sistema que contenga todos los puntos inscritos en el sistema. El sistema está compuesto por 2 cadenas cinemáticas semejantes el cual facilita el cálculo de dichas cadenas, debido que con los cálculos de una se hallan inmediatamente las otras 2 cadenas. Para facilidad de orientación, se coloca el origen en el centro de la base y el eje coordenado X se colocará en orientación a la cadena cinemática en trabajo, cabe aclarar que el sistema tiene una orientación en los ejes XYZ.
Figura 18. Esquema análisis geométrico Datos del sistema: L1 L2= Eslabones de la cadena cinemática (CC). A, B, C = Articulaciones. Ө= Angulo formado entre el X' y L1 G2= Angulo formado entre la proyección de AB y BC M3= Angulo formado entre él Y' y BC. β= Angulo formado entre L1 y L2. P = Posición del centro de la plataforma móvil P= [Px Py Pz] T
R = Distancia entra 0 y A. r = Distancia entre P y C. α = Angulo formado entre X y X'. Si la cadena cinemática (CC) = i; tenemos 3 CC (i=1, 2, 3) y Ө1, Ө2, j3) para cada i, del sistema se obtiene 9 ángulos de articulación.

56
El sistema AX'Y'Z' con respecto al sistema de origen (0XYZ), se encuentra a una distancia R a lo largo de 0Xse adiciona una rotación a entorno al eje 0Z. Se encuentra los vectores 0A, 0B, 0C, BA, BC y AC para resolver este sistema se utiliza el sistema de matrices de transformación homogénea. La matriz transformación homogénea T tiene una dimensión de dimensión 4x4 que representa la transformación de un vector de coordenadas homogéneas de un sistema de coordenadas a otro, como resultado se obtiene cuatro submatrices de distinto tamaño que ilustran la rotación, traslación, perspectiva y escalado global.
T=
Debido a que en esta aplicación solo interesa la rotación y la translación se anulará las demás variables
0 1 0 1
Para hallar las coordenadas del vector r= (rx, ry, rz) en el sistema del origen 0XYZ, conociendo las coordenadas (r’x’, r’y’, r’z’) en el sistema 0’X’Y’Z’
1
=T
′
1
(3)
Para sintetizar la ecuación se define que: Sen=c y Cos =c Si se realiza la translación seguida de una rotación con ángulo alfa sobre el eje 0Z del origen 0XYZ la matriz homogénea que resulta es:
T(P,(Z,α))=
00
0 0 10 0 0 1
Al reemplazar (4) en (3), se obtiene los vectores 0A, 0B, 0C, BA, BC y AC, se debe usar el subíndice i para notar la referencia de las 3 cadenas cinemática

57

58
7.5 ANALISIS DE CARGAS
El análisis de cargas se realiza para saber la capacidad de resistencia de la plataforma respecto al peso al cual será sometido.
Tabla 10. Análisis de cargas
Cuando no se somete peso a la plataforma se evidencia una mayor presión en la base donde se apoya la plataforma que representa la zona en color naranja.
La zona en color azul es una carga leve ya que no se está sometiendo un peso mayor, y la base de apoyo no genera la aplicación de un mayor esfuerzo.
En esta imagen se observa la variación del color ya que se dispone de una carga generada por el pie que presiona la plataforma, la cual distribuye la carga por este soporte en forma uniforme
La uniformidad de la carga en el soporte se debe al centro de inercia con la que está diseñado el mecanismo ya que el desplazamiento de la plataforma debe ser exacto para no generar problemas en los movimientos de rehabilitación.

59
7.6. DISEÑO ELECTRÓNICO
Para realizar el circuito de control y de potencia se contemplan alternativas como Arduino, micro controladores, FPGA, raspberry. Se toman parámetros como costo, funciones, optimización de espacio, arrojando una comparación en la siguiente información:
Arduino Micro controladores
FPGA Raspberry
Costo $65.000 $40.000 $250.000 $110.000 Funciones -Código libre
-Modular -Código privado -interconexión -versatilidad
-full comunicación -Versatilidad -Modular
-Full comunicación -código libre
Se requiere un código de programación privado, para que no se puedan modificar los parámetros de los movimientos de las terapias, puesto que estos movimiento, ya están estipulados (ver TABLA N°3), lo que se requiere, es una programación de ciclos de repetición.
Un sistema como el FPGA presenta algunas dificultades en el sistema de potencia, lo que puede incidir en la transferencia de datos en los actuadores.
El dispositivo de menor costo que suple las necesidades del sistema es el microcontrolador, además de su facilidad en la programación para que el código sea reservado por el programador.
La elección será orientada a un sistema por microcontrolador.
La etapa electrónica constara de un sistema de control basado en un microcontrolador PIC16F877 [25], de la familia microchip enlazado a un módulo bluetooth HC05 [24], quien transmite la información a un dispositivo Android. Adicionalmente el microcontrolador está conectado a una pantalla LCD 2X16 [23], visualizando la tarea en ejecución y/o el estado de la máquina.
La alimentación está encargada una fuente de energía genérica ATX, suministra 12 voltios y regulándolo mediante un lm2596 [22], alimenta los dos servomotores [26], suministrando una corriente de 2 amperios.

60
Figura 19. Plano esquemático del circuito
En el esquema de la figura 19, se muestra la interconexión de los diversos elementos, haciendo una interfaz sencilla y eficaz, para la normal operación del sistema, interconectando el microcontrolador, con el dispositivo android, permitiendo la recepción de órdenes para ser transmitidas a los drivers de los servomotores [26].
La selección de materiales se realiza pensando en hacer modular el sistema, optimizando los tiempos de mantenimiento correctivo y/o preventivo en un futuro, permitiendo la fácil detección de fallos del sistema y reduciendo la labor correctiva al el cambio del sistema electrónico averiado.
La etapa de potencia es alimentada por fuente anteriormente mencionada, haciendo que los dos servomotores giren de acuerdo a las órdenes provenientes del microcontrolador.
Figura 20. Placa sistema electrónico

61
En el laboratorio se realizaron pruebas, determinando, el consumo de corriente, de la etapa de control, se encuentra en 0.450 mA aproximadamente, y sumando la etapa de potencia sin carga, oscila alrededor de 0.8 mA, sumándole la carga, con una alimentación de 6 voltios, se incrementa hasta el consumo, llegando a 1.5 Amp.
7.7 PROGRAMACIÓN DEL SISTEMA
La programación está basada en un aplicativo para dispositivos Android, utilizando dos modos de uso, el primero, basado en un modo manual, en donde se puede mover de manera analógica el dispositivo; recomendando este modo para realizar un test del automatismo. El segundo modo, es de manera automática, en donde el usuario introduce en la interfaz, los datos necesarios para la operación autónoma del dispositivo, así como son los tipos de movimiento, velocidades de actuación, repeticiones de cada ejercicio y tiempo estipulado para cada uno.
El software del dispositivo móvil es un entorno que traduce las instrucciones del operador en lenguaje máquina, enviando vía bluetooth al sistema de control.
Esta aplicación está configurada exclusivamente para establecer comunicación con la plataforma de rehabilitación. Basándose en un entorno JAVA.
Figura 21. Interfaz google app inventor
La programación está construida en google app inventor; google app Inventor es una plataforma de Google Labs para crear aplicaciones de software para el sistema operativo Android.
En esta plataforma, se da el diseño a cada botón del sistema, junto con su función correspondiente; el modo de operación de cada sección de la interfaz, debe estar

62
guiado de instrucciones de manipulación en tiempo real; estas señales son enviadas a través del módulo bluetooth, el cual, genera el movimiento correspondiente y visualizara, si esta en operación, o no, mostrando esta información a través de una pantalla de LCD, la cual, está conectada a la plataforma asistida.
Figura 22. Visualizador de proceso para plataforma asistida
El editor de bloques de la plataforma App Inventor (ver anexo 9), utiliza la librería Open Blocks de Java para crear un lenguaje visual a partir de bloques, en esta librería se realizara la instancia de cada botón de la aplicación app, dando función a cada parámetro y generando la estructura de operación del sistema.
Figura 23. Diagrama de bloques para programación app

63
El software necesita una conexión vía bluetooth para la verificación de la compatibilidad, posteriormente aparece la opción de poder mover la plataforma de manera automática o manual, cuya selección depende de quien la esté manipulando; a continuación, se encuentra el diagrama de flujo del programa y la explicación del entorno.
Figura 24. Diagrama de flujo operación del sistema
Modo manual: El modo manual, permite mover la plataforma analógicamente, sin ningún tipo de control, mediante el dispositivo Android; dentro de la interfaz, se encuentra una circunferencia de color rojo, donde se podrá desplazar la plataforma a conveniencia.
Figura 25. Interfaz modo manual

64
Modo automático: El modo automático permite seleccionar el tipo de movimiento a realizar. Dentro de los movimientos, se encuentran las opciones de: dorsiflexion, plantar flexión, eversión; tanto para movimientos diestros como zurdos, permitiendo posteriormente, graduar la velocidad en escala de 1 a 10, siendo 10 la velocidad más alta en un tiempo ajustable en segundos, como se muestra la imagen.
Figura 26. Interfaz modo automático y selección de modo
GUIA DE USUARIO
Siga las instrucciones que se muestran a continuación, para la configuración de la plataforma móvil.
1. Conecte la fuente a una toma corriente que supla 110 voltios a una frecuencia de 60Hz.

65
2. Inicie la plataforma desde el interruptor ubicado en la parte frontal del tablero de control.
Allí se encenderá un led que indicara que el sistema de mando está activado, el cual, mostrara el modo de operación a través de un visualizador.
3. Desde su dispositivo android ubique la aplicación Plataforma Ortopédica, e inicie dicha aplicación.

66
4. Al inicio de la aplicación, se genera una pantalla en donde se presenta las opciones de modo automático y modo manual. Esta decisión la toma el especialista que se encuentra manipulando la plataforma. Tambien se presenta la opcion de cerrar, que cancelaria cualquier tarea en ejecucion.
5. Despues de la selección del modo, se debe verificar, la activación del dispositivo, vía bluetooth, seleccionando la interconexión con el periférico 18 HC -05; una vez se realice la conexión del sistema, la plataforma se encontrara lista para ser programada con los ejercicios correspondientes.

67
6. Si se escoge el modo manual, encontrará una pantalla, donde el usuario puede disponer de los movimientos de la plataforma, según sea el desplazamiento del punto rojo, sobre el círculo de color gris.
7. Si se escoge el modo el automático, el especialista procede a elegir entre las opciones que se despliegan como son: Dorsiflexión, plantarflexión, eversión derecha, eversión izquierda, eversión derecha, inversión derecha, inversión izquierda.

68
8. El especialista debe seleccionar la velocidad requerida en una escala de 1 a 10, adicionalmente, se debe escoger el tiempo destinado para cada tipo de movimiento especificado en segundos.
9. Al dar la opción de inicio, iniciara la terapia correspondiente según los parámetros establecidos por el terapeuta; finalizando la cantidad de repeticiones programadas, se activará una alarma, la cual, indicara que la operación ha finalizado, para así llevar a cabo otro tipo de movimiento si se requiere.
7.8 ETAPA DE CONTROL
La etapa de control se realiza basándose en la implementación de un control PID [27], dicho control se obtienen la descripción de movimiento y posición del automatismo y se resume en una serie de matrices que se procesan mediante el software llamado MATLAB. [28].
Se iniciará con la programación de la placa de control, esta se efectúa declarando las variables de entrada como son: tiempo, movimiento, repetición y ángulos de cada movimiento. Luego de introducir estos parámetros, se evalúan los datos de entrada haciendo la planeación de trayectorias inscritas en el área de trabajo, arrojando como resultado las señales de cada uno de los motores.
Como es un sistema de lazo cerrado constantemente se encuentra retroalimentando la información del posicionamiento de la plataforma haciendo un sistema estable y sostenible.

69
Una vez se termina de ejecutar una tarea, se entra a evaluar si los datos ingresados tienen pendientes, del no ser así, se finaliza la secuencia.
La parte de potencia, consta de servomotores [26] cuyas características técnicas transmiten un torque hasta de 15 Kg/cm, requieren una fuente de 6 voltios a 2 amperios. En la etapa de control de potencia, se implementan transistores, con el fin de aislar la etapa de control, con todas las perturbaciones que se generan en la etapa de potencia, así, poder suplir la corriente requerida por el servomotor sin generar puntos calientes y afectaciones por temperatura de operación en el circuito.
Figura 27. Esquema diagrama de potencia
Dicho sistema de control está basado en un PWM, donde se modula el ancho de pulso obteniendo el control de velocidad de los motores.
Para la programación de un PWM es de vital importancia tener un completo conocimiento de la frecuencia con la que opera el microcontrolador. Donde se debe controlar variables como:
La frecuencia del oscilador principal Fosc El pre-scaler (PRE) o divisor previo del timer TMR2 que puede tomar los
valores 1:1, 1:4 o 1:16 El registro PR2 (0-255) asociado al timer TMR2
Para lograr la señal PWM, se debe usar el timer2, el cual establece la frecuencia de la señal PWM cargando un valor en el registro PR2. El ciclo da inicio con un reset, donde timer2 pasa a su estado cero, luego va incrementando hasta que su valor iguale a PR2, momento en que ocurre un nuevo reset y así en un ciclo. La anchura del pulso (duty cycle), está dado por el valor cargado en el registro CCPR1L:CCP1CON (8bits ó 10bits). Así cuando ocurre un reset del timer2, el pin

70
de salida PWM pasa a 1, luego cuando timer2 iguale el valor cargado en el registro CCPR1L:CCP1CON, el pin de salida PWM pasa a 0. El timer2 continúa su ciclo de conteo hasta que iguale a PR2 y un nuevo reset.
PWM_Periodo=(1/clock)*4*t2div*(PR2+1)
Está formula nos permite hallar el valor del periodo para el ciclo PWM, en donde se toma el timer como con variable dentro del ciclo programado y tomando un cristal de 4Mhz. (Ver anexo 10)
La instrucción setup_ccp1(CCP_PWM) configura el módulo CCP1 como PWM, entonces el pin en el microcontrolador referente a RC2/CCP1, funciona como salida PWM. El periodo de duración de un ciclo de PWM se encuentra determinado por el valor que se tiene guardado en PR2 según la fórmula:
PR2=((PWM_periodo*clock)/(4*t2div))-1
El ancho de pulso (duty cycle) o tiempo que la señal PWM está alta durante cada ciclo, viene dada por la formula:
Duty_cycle= value*t2div*(1/clock)
si value es LONG INT
y Duty_cycle= value*t2div*4*(1/clock) si value es INT.
Donde value es el valor cargado en CCPR1L:CCP1CON (8bits ó 10bits).
El Duty Cycle puede se establecido usando la instrucción:
set_pwm1_duty(value);
La instrucción:
Setup_timer_2(mode, P, postscale)
El periodo del PWM dado un valor de PR2 entre 0 y 255. Este valor determina en que momento el timer2 se resetea iniciando así un ciclo de PWM. Postscale y toma un número entre 1 y 16 que determina cuantas veces el timer2 se resetea antes de que ocurra la interrupción.
Ejemplo: Si se tiene un cristal de 4Mhz clock = 4MHZ y PR2 = 127, entonces, un ciclo de PWM dura: Periodo = 1/4000000)*4*1*128 = 12.8us Luego usando la instrucción: setup_timer_2 (T2_DIV_BY_1, 127, 5); Tenemos que Timer2 se incrementa cada 200nseg, reset cada 12.8 useg y genera una interrupción cada

71
12.8 * 5 = 64 useg. Además si hacemos PR2 igual a 100, un valor de 45 en CCPR1L crea un duty cycle de 45%, un valor de 65 en CCPR1L crea un duty cycle de 75%.
Una vez se calcula el PWM, se procede a realizar los cálculos para un control PID, que en este caso controlará la posición del motor y cuya variable que actuara es el ciclo útil del PWM.
La finalidad del sistema de control es poder calcular una discrepancia (error) entre el objetivo (posición deseada, introducida por el usuario) y la realidad (posición del motor obtenida a través la retroalimentación del servomotor). Dicho error se usará como feedback para modificar la variable de control.
En este caso, siendo Pref la posición que se desea (target u objetivo) y siendo pos (determinada por la retroalimentación del servomotor) la posición actual del motor, se definirá el error, en un momento dado como:
Hasta el momento solo se podrá determinar el sentido de giro en el motor debido al PID, siendo positivo el resultado, el motor gira en sentido de las manecillas, si es negativo, girará inversamente a las manecillas.
Para calcular el control, el error instantáneo el error se mide en un instante n, pero para la parte integral y derivativa se tendrá que hacer aproximaciones numéricas:
La integral se substituye por una suma de valores anteriores del error. Además se limita en el tiempo, sumando los últimos N errores, en vez del historial completo de errores. Formalmente se tendrá que añadir un término h (el intervalo de tiempo entre muestras) pero dicho término (constante) puede ser absorbido por la constante de integración Ki.
La función numérica de la derivada, lo más fácil es substituirla por la diferencia entre errores sucesivos, aunque pueden usarse estimaciones más exactas. De nuevo, el factor h que aparece puede entrar dentro de la constante Kd, por lo que no es necesario introducirlo explícitamente:

72
Posteriormente se implementan dicha función del código de programación en el microcontrolador.
La implementación de la función de transferencia está dada por la formula anterior, muestra fragmento del código implementado en el pic:
if (TMR2_flag) { incre_motor++; if ((incre_motor&0x0F)==0) { temp=quad; velocidad=temp-last_quad; last_quad=temp; if (velocidad>128) velocidad-=256; else if (velocidad<-128) velocidad+=256; posicion=posicion+velocidad; error=Pref-posicion; if (err_idx==0) last=past[NPAST-1]; else last=past[err_idx-1]; error_der = (error - last); error_int-=past[err_idx]; error_int+=error; past[err_idx]=error; err_idx++; err_idx&=(NPAST-1); print_pid(); create_msg(); send_msg(msg,12); } TMR2_flag=0; return; }
Con el código anterior se logra obtener varios factores como son las magnitudes del error derivativo, error integral acumulado y el error instantáneo. Guardando estas variables para en el caso del error integral se suma con los errores de buffer, pero para hacerlo optimo se borran de la memoria RAM del microcontrolador el resultado anterior al calculo que se está ejecutando, con el fin de hacer optimo el cálculo de un proceso a la vez.
// Error inte
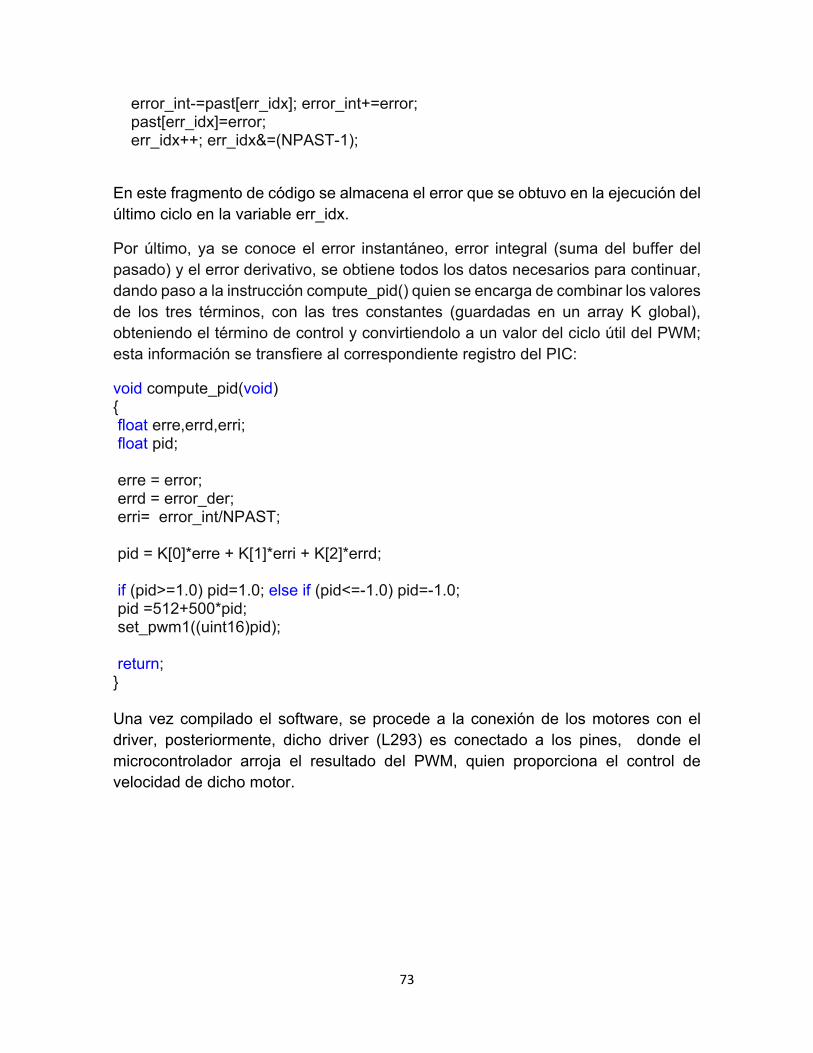
73
error_int-=past[err_idx]; error_int+=error; past[err_idx]=error; err_idx++; err_idx&=(NPAST-1);
En este fragmento de código se almacena el error que se obtuvo en la ejecución del último ciclo en la variable err_idx.
Por último, ya se conoce el error instantáneo, error integral (suma del buffer del pasado) y el error derivativo, se obtiene todos los datos necesarios para continuar, dando paso a la instrucción compute_pid() quien se encarga de combinar los valores de los tres términos, con las tres constantes (guardadas en un array K global), obteniendo el término de control y convirtiendolo a un valor del ciclo útil del PWM; esta información se transfiere al correspondiente registro del PIC:
void compute_pid(void) { float erre,errd,erri; float pid; erre = error; errd = error_der; erri= error_int/NPAST; pid = K[0]*erre + K[1]*erri + K[2]*errd; if (pid>=1.0) pid=1.0; else if (pid<=-1.0) pid=-1.0; pid =512+500*pid; set_pwm1((uint16)pid); return; } Una vez compilado el software, se procede a la conexión de los motores con el driver, posteriormente, dicho driver (L293) es conectado a los pines, donde el microcontrolador arroja el resultado del PWM, quien proporciona el control de velocidad de dicho motor.

74
7.9 INTERFAZ SISTEMA DE PROGRAMACIÓN
Básicamente se utiliza para introducir el programa; los datos a introducir constan del tiempo de la terapia, movimiento a realizar (dorsiflexion, plantarflexion etc) y grados máximo de esfuerzo.
La estructura de funcionamiento de la plataforma, posee un ordenamiento para poder efectuar cada instrucción y evitar errores en la ejecución de cada movimiento, para esto, se hace necesario aplicar una estructura de operación del sistema como conjunto final.
A continuación, se muestra el diagrama de flujo en la interfaz de usuario con el mecanismo:
Figura 28. Diagrama de flujo de interfaz
En donde:

75
T0= Temporizador interno Tiempo= Tiempo requerido por el usuario Mov1: Hace referencia si el movimiento es de dorsiflexión/plantarflexión Mov2: Hace referencia si el movimiento es de eversión/inversión Mov3: Hace referencia si el movimiento es de abducción/aducción 7.9 ORGANIZACION DE LAS ETAPAS
Para llevar a cabo cada etapa de desarrollo del proyecto, es fundamental realizar un cronograma de actividades (ver anexo 3), que permita visualizar los periodos de tiempo a implementar, junto con los costos necesarios para ejecutar cada acción. Para esto se implementara el software de PROJECT 2015 (ver anexo 8), que permite organizar las actividades a realizar para cada etapa del proceso, estableciendo el costo necesario para cada una.
Este diagrama de fases del proyecto se denomina diagrama de Gantt, el cual permite identificar en forma rápida el proceso general de todo el proyecto. Ver anexo 7.
A partir de este diagrama se podrán elaborar estadísticas para determinar los informes correspondientes a:
Informe del costo previsto. Ver anexo 8 Informe general de costos. Ver anexo 9 Informe del trabajo presupuestado Ver anexo 10 Informe del resumen de trabajo los recursos. Ver anexo 11
Cada información en los informes, permite realizar la comparación entre los costos de cada tarea y el tiempo de implementación para cada etapa del proyecto, reflejando la viabilidad del proyecto.
También se puede evidenciar el avance del trabajo para tiempos estipulados y alcances que se deben tener en cuenta para suplir en forma positiva la investigación.
Toda la consolidación de la información permite generar una estructura sólida de trabajo, llevando a cabo las tareas en el diagrama de Gantt; al final, se podrán evidenciar como fase final, la implementación del robot paralelo en el instituto de recreación y deportes, para determinar cómo actúa esta solución frente a la problemática que abarcaba el lugar. Es una solución que puede trascender, ya que, el objetivo es ampliar todos los conocimientos en rehabilitación de esguinces leves de tobillo.

76
La investigación permite dar un nuevo aporte para mejorar el sistema de salud del municipio de Soacha, logrando mejorar la calidad de vida de los deportistas.
8. PARÁMETROS PARA FUNCIONAMIENTO DE LA PLATAFORMA REHABILITADORA
Para finalizar el proceso de investigación, es importante determinar los parámetros que se requieren para el funcionamiento de la plataforma de rehabilitación; estos parámetros pueden ser utilizados como el manual de indicaciones, para llevar a cabo la rehabilitación de esguinces leves de tobillo, a través de una plataforma de rehabilitación.
Estos parámetros estarán descritos en la figura 19, a través de un mapa mental que involucra las acciones a realizar para lograr la rehabilitación del esguince leve del tobillo.
Figura 29. Mapa mental de parámetros para la rehabilitación de esguince

77
9. ESTUDIO DE CASO
Para poder determinar la viabilidad del proyecto, se hace necesario plantear un estudio de caso, el cual, permita indagar sobre la necesidad de implementar este tipo de proyectos, la rectificación del uso de tecnologías y la implementación del mismo, para certificar una solución factible, a una problemática evidenciada en el municipio de Soacha.
Para iniciar el estudio de caso, es necesario determinar, los componentes necesarios para estructurar y formar las evidencias, que llevaran a cabo la importancia de aplicar este tipo de soluciones.
9.1 Antecedentes
En el municipio de Soacha se ha evidenciado la potencialidad en el campo de los deportes, destacando nuevos grupos de personas que incursionan en la práctica de diversas modalidades deportivas, las cuales están siendo direccionadas desde centros de especialización, que día a día promueven el buen desarrollo de la competencia y el liderazgo.
Uno de los centros donde participan conjuntos de deportistas está ubicado en la Calle 15 N° 8-53 Soacha – Cundinamarca apoyado por el instituto municipal para la recreación y deporte de Soacha, donde participan numerosas personas en las distintas modalidades deportivas como lo son el futbol, baloncesto, voleibol, patinaje, ciclismo, natación y otra serie de deportes que han tomado un nuevo enfoque y han logrado coordinar diferentes proyectos a lo largo de los últimos años.
Cada dependencia deportiva organiza y establece una serie de horarios para practicar en el centro de formación, así se logra contar con la adecuación necesaria del espacio y disciplina que requieren cada participante que incursiona en cada deporte que allí se enseña. Durante el año 2013 la población que se ha vinculado a este centro deportivo, ha estado aumentado considerablemente, ya que el crecimiento habitacional del municipio se ha ampliado en un 10% hasta el año actual 2016, dato tomado del DANE [22]; este aumento de participantes ha focalizado la atención en la administración del centro deportivo en la estructuración y apoyo financiero, sobre los insumos de cada dependencia deportiva y el aporte monetario para aquellos profesionales que brindan los módulos de enseñanza, que han sido planeados durante cada año a través de la dirección municipal.

78
La focalización de estos recursos destinados a la promoción de cada deporte, ha originado un descuido en el proceso de atención medico y terapéutico que requieren los deportistas que sufren estas problemáticas y requieren de atención prioritaria para poder continuar con su proceso de formación; el instituto durante el año 2013 promovió un centro de atención medico y terapéutico donde se pudiera asignar la atención a todas las personas que requieran de este servicio.
En el centro de atención, se origina un espacio para un terapeuta, que llevara los métodos de rehabilitación correspondientes; pero se evidencia la falta de herramientas que permitan apoyar estos métodos terapéuticos y algún método de control, para llevar el conteo de la cantidad de sesiones a trabajar para cada lesión.
Dentro de los diferentes casos sobre lesiones que se evidencian en el centro de rehabilitación que allí llegan, se destaca con mayor frecuencia las lesiones de tobillo; estas lesiones están clasificadas dependiendo el grado de complejidad, donde las de especial gravedad son llevadas obligatoriamente a centros especializados en este tipo de lesiones, dejando de un 10% de los casos de lesiones de tobillo encargadas al centro de rehabilitación, que corresponden a lesiones leves de grado 1. Este tipo de lesiones son tratadas a través de un proceso de Kinesiología establecido por los terapeutas que allí participan.
La implementación de este tipo de procesos de rehabilitación, ha originado algunos agravantes, debido a la falta de herramientas que ayuden a trabajar los ejercicios de rehabilitación y un método de control para la cantidad de ciclos de trabajo, durante cada terapia, causando una serie de quejas y reclamos por parte de los deportistas, los cuales exigen una mejor atención y organización de las terapias.
Es necesario implementar alguna solución que permita dar una respuesta, respecto a las necesidades del instituto, apoyados bajo algunos parámetros necesarios para llevar a cabo las terapias de rehabilitación, como los son: tiempos de cada sesión, tipos de movimientos a realizar, la frecuencia de cada movimiento y finalmente la cantidad de ciclos de trabajo para cada movimiento.
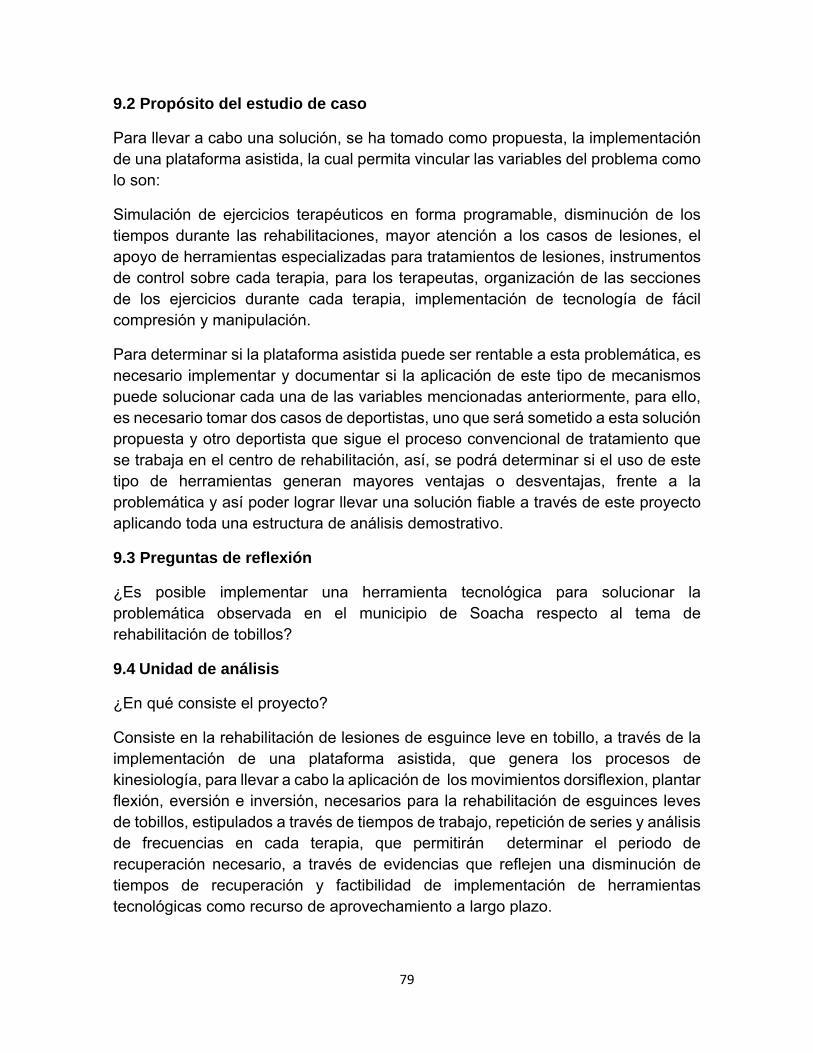
79
9.2 Propósito del estudio de caso
Para llevar a cabo una solución, se ha tomado como propuesta, la implementación de una plataforma asistida, la cual permita vincular las variables del problema como lo son:
Simulación de ejercicios terapéuticos en forma programable, disminución de los tiempos durante las rehabilitaciones, mayor atención a los casos de lesiones, el apoyo de herramientas especializadas para tratamientos de lesiones, instrumentos de control sobre cada terapia, para los terapeutas, organización de las secciones de los ejercicios durante cada terapia, implementación de tecnología de fácil compresión y manipulación.
Para determinar si la plataforma asistida puede ser rentable a esta problemática, es necesario implementar y documentar si la aplicación de este tipo de mecanismos puede solucionar cada una de las variables mencionadas anteriormente, para ello, es necesario tomar dos casos de deportistas, uno que será sometido a esta solución propuesta y otro deportista que sigue el proceso convencional de tratamiento que se trabaja en el centro de rehabilitación, así, se podrá determinar si el uso de este tipo de herramientas generan mayores ventajas o desventajas, frente a la problemática y así poder lograr llevar una solución fiable a través de este proyecto aplicando toda una estructura de análisis demostrativo.
9.3 Preguntas de reflexión
¿Es posible implementar una herramienta tecnológica para solucionar la problemática observada en el municipio de Soacha respecto al tema de rehabilitación de tobillos?
9.4 Unidad de análisis
¿En qué consiste el proyecto?
Consiste en la rehabilitación de lesiones de esguince leve en tobillo, a través de la implementación de una plataforma asistida, que genera los procesos de kinesiología, para llevar a cabo la aplicación de los movimientos dorsiflexion, plantar flexión, eversión e inversión, necesarios para la rehabilitación de esguinces leves de tobillos, estipulados a través de tiempos de trabajo, repetición de series y análisis de frecuencias en cada terapia, que permitirán determinar el periodo de recuperación necesario, a través de evidencias que reflejen una disminución de tiempos de recuperación y factibilidad de implementación de herramientas tecnológicas como recurso de aprovechamiento a largo plazo.

80
9.5 Métodos e instrumentos de recolección de la información.
Dentro de los métodos de recolección de información se utilizaran las siguientes herramientas:
Entrevistas sobre los tipos de tratamientos a implementar a terapeutas especializados.
Investigación de la aplicación de la kinesiología para la rehabilitación de esguinces leves de tobillo.
Investigación de mecanismos que simulen los movimientos de kinesiología para la rehabilitación de esguinces de tobillo.
Aplicación de encuestas para determinar mejoras en el proceso de rehabilitación dentro del instituto de recreación y deportes
Implementación de pruebas sobre la plataforma asistida a un deportista que presente una lesión leve de esguince de tobillo.
Toma de apuntes sobre las observaciones en el transcurso de la rehabilitación del paciente seleccionado.
Registro de evidencias sobre mejorías en la rehabilitación a través de toma de muestras fotográficas.
Elaboración de ficha de rehabilitación donde se consigne la cantidad de sesiones aplicadas.
Creación de graficas estadísticas sobre mejoras en el proceso de rehabilitación.
Aplicación de cuestionario al paciente finalizando el proceso de rehabilitación.
9.6 Métodos de análisis de la información
Implementación de estrategias cualitativas a través de técnicas directas interactivas, la recolección de información documentada con descripción en tiempos de muestreo que evidencien un progreso positivo en la rehabilitación de esguinces leves de tobillo.
Información recopilada en tablas de evidencias con muestras fotográficas (ficha técnica de operación, pág. 87) y graficas de tendencia (ver figura 31 y 33) sobre progreso en la recuperación.
Tabulación de variables que se cuantifican con la implementación de la plataforma asistida.

81
9.7 Documentación del estudio de caso
Entrevista
Nombre del entrevistado: María Lucia Benavides terapeuta profesional Nombre del entrevistador: Juan Pablo Rodríguez creador del proyecto Tema: información sobre rehabilitación de esguinces leves de tobillo. Duración: 30 min Cantidad de preguntas: 7 preguntas
Preguntas a formular:
Pregunta 1
Para tratar un esguince leve de tobillo ¿qué tipo de proceso se debe llevar a cabo?
Respuesta:
Para el tratamiento de esguinces leves de tobillo, es necesario realizar un precalentamiento ligero, el cual, permita adecuar el tobillo para la terapia, así, poder iniciar con la rutina correspondiente.
Dentro de los ejercicios que se deben realizar están:
Dorsiflexion Plantarflexion Eversión Inversión
(Ver figuras 6 y 7, pág. 29)
Cada uno de estos ejercicios, se debe trabajar en intervalos de tiempos descritos en la Tabla 5, con tiempos de recuperación de 1 minuto, estas secciones se deben trabajar 3 días a la semana durante un mes.
Estas terapias deben ir apoyadas de tiempos de descanso, sin esfuerzo en el tobillo y en algunas ocasiones, se suele implementar algunos elementos externos como cremas y baños con hierbas medicinales.
Pregunta 2
¿Qué tipo de herramientas se necesitan para llevar a cabo la rehabilitación de un esguince leve de tobillo?

82
Respuesta:
Como herramienta fundamental no se requiere de algún instrumento específico, pero es necesario contar con un espacio adecuado para poder apoyar el tobillo y poder ejecutar la terapia en forma cómoda. En algunas ocasiones se pueden implementar algunos elementos como vendajes.
Pregunta 3
¿De dónde se sacan los tiempos de las terapias para cada ejercicio?, ya que coinciden con los datos entregados por otro terapeuta que dio la misma información. (Ver TABLA N° 5, pág. 44)
Respuesta:
Todos los datos de tiempo de rehabilitación para este tipo de lesiones, son estándares, según estudios realizados de kinesiología, en diversos centros de rehabilitación, esta información es actualizada año tras año.
Pregunta 4
¿Qué otros tipos de procedimientos existen para la rehabilitación de esguinces de tobillo?
Existen otros métodos para la rehabilitación de esguinces de tobillo entre los métodos encontramos:
Aplicación de rayos infrarrojos
Implementación de dispositivos de ultrasonido
Algunos mecanismos de recuperación para comprensión en zonas de dolor.
Pero todos estos métodos son utilizados para esguinces de tobillo de mayor gravedad, ya que este tipo de lesiones requieren de un trato especial, en centros especializados.
Pregunta 5
¿Estaría de acuerdo, en implementar, alguna tecnología, que permita apoyar al proceso de rehabilitación a través de una plataforma, que pueda ser controlada desde su celular?
Si existiera alguna tecnología que ayudara a llevar el proceso de terapia para la rehabilitación de tobillos a través del celular, podría generar un impacto llamativo al campo de la kinesiología, seria de fácil comprensión, ya que en la actualidad,
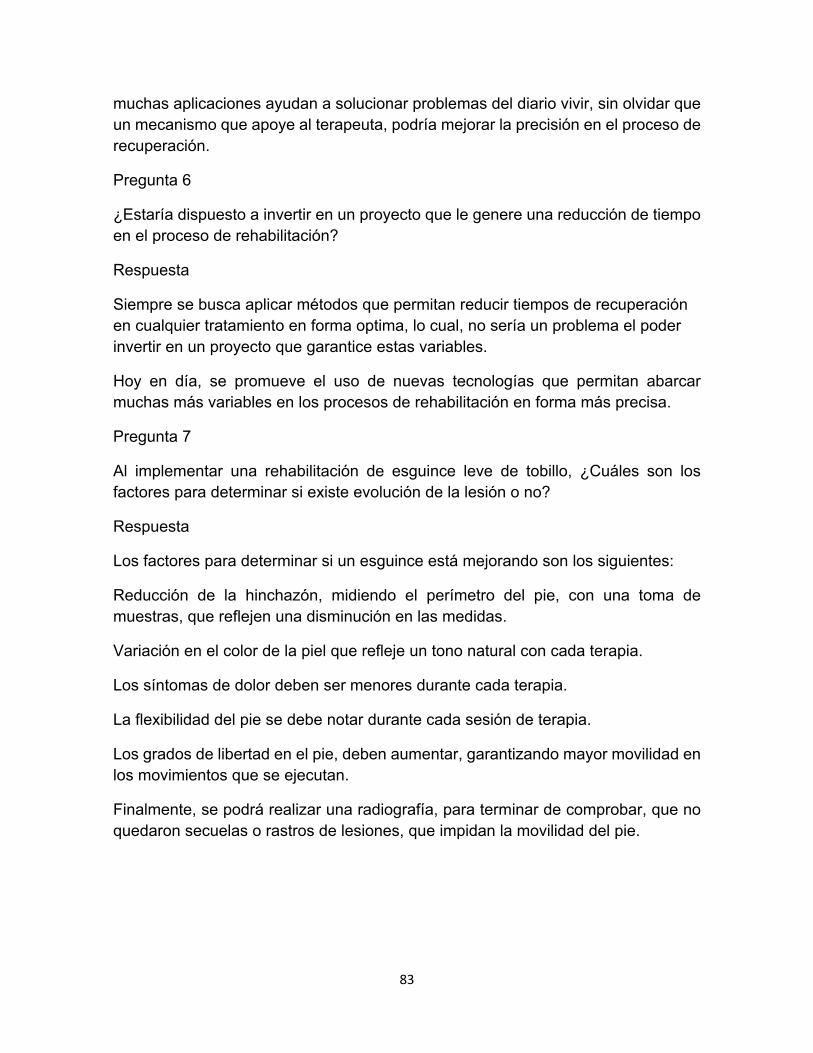
83
muchas aplicaciones ayudan a solucionar problemas del diario vivir, sin olvidar que un mecanismo que apoye al terapeuta, podría mejorar la precisión en el proceso de recuperación.
Pregunta 6
¿Estaría dispuesto a invertir en un proyecto que le genere una reducción de tiempo en el proceso de rehabilitación?
Respuesta
Siempre se busca aplicar métodos que permitan reducir tiempos de recuperación en cualquier tratamiento en forma optima, lo cual, no sería un problema el poder invertir en un proyecto que garantice estas variables.
Hoy en día, se promueve el uso de nuevas tecnologías que permitan abarcar muchas más variables en los procesos de rehabilitación en forma más precisa.
Pregunta 7
Al implementar una rehabilitación de esguince leve de tobillo, ¿Cuáles son los factores para determinar si existe evolución de la lesión o no?
Respuesta
Los factores para determinar si un esguince está mejorando son los siguientes:
Reducción de la hinchazón, midiendo el perímetro del pie, con una toma de muestras, que reflejen una disminución en las medidas.
Variación en el color de la piel que refleje un tono natural con cada terapia.
Los síntomas de dolor deben ser menores durante cada terapia.
La flexibilidad del pie se debe notar durante cada sesión de terapia.
Los grados de libertad en el pie, deben aumentar, garantizando mayor movilidad en los movimientos que se ejecutan.
Finalmente, se podrá realizar una radiografía, para terminar de comprobar, que no quedaron secuelas o rastros de lesiones, que impidan la movilidad del pie.

84
9.8 Mecanismos que simulan los procesos de kinesiología
Tabla 11. Opciones para rehabilitación de esguince leve e tobillo
Con esta información recolectada se puede determinar que la mejor solución para poder implementar una tecnología es a través de una plataforma asistida, sus ventajas se ven reflejadas en la construcción y diseño, los costos de fabricación, el fácil manejo que no requiere de extensas capacitaciones, es de fácil acceso, incluso para los deportistas en casos que no requieran al terapeuta, sino por el contrario, los deportistas puedan direccionar sus rehabilitaciones de tobillo por cuenta propia a través de un dispositivo móvil, teniendo en cuenta los tipos de ejercicios a trabajar por día y los intervalos de tiempo que el terapeuta plantea inicialmente. (Ver anexo 10)
Son mayores las ventajas evidenciadas, al implementar una plataforma asistida, dando pautas, para poder diseñar y construir un prototipo, que permita observar su uso en algún caso puntual.
Seleccionando el tipo de mecanismo a realizar es necesario determinar que funciones debe poseer este mecanismo para llevar a cabo el proceso de rehabilitación.
Robots paralelos Plataformas asistidas
Plataformas Stewart Brazos robóticos
Pueden generar los movimientos necesarios para la rehabilitación de tobillo, pero requieren de un análisis cinemático más complejo que otros dispositivos, los grados de libertad pueden variar en un margen de tolerancia mayor lo que podría generar empeoramiento en la rehabilitación de un esguince de tobillo.
Su diseño no requiere un análisis estructural de profundidad, su fundamento esta dado en la programación de las variables y su forma puede ser más ergonómica que otros dispositivos como los robots. El costo de fabricación puede ser más económico que el de un robot.
Su principio se basa en un robot paralelo pero requiere del análisis de una cinemática inversa para su funcionamiento, la capacidad de grados de libertad es de 6°, su rango puede ser utilizado para las rehabilitaciones de tobillo sin dificultad, pero pueden generar muchas más fuerza en el movimiento, lo que puede empeorar la lesión.
Los brazos robóticos son más costosos que cualquier mecanismo, pueden recrear cualquier movimiento, pero cuentan con la desventaja de generar mayor fuerza en la zona del impacto, trabajan con más grados de libertad lo que puede afectar el tratamiento.

85
Figura 30. Mapa mental sobre funciones de la plataforma asistida
9.9 Encuesta de indagación
Es necesario, realizar una encuesta sobre la satisfacción del cliente en el instituto de recreación y deporte, junto con la opinión, sobre la implementación de nuevas tecnologías, que permitan mejorar la calidad del servicio prestado; para esta encuesta se tendrá en cuenta la siguiente información:
Horarios para los tratamientos Uso de herramientas para la rehabilitación Tiempo necesario para la rehabilitación Atención prestada a los deportistas Cantidad de terapeutas para la rehabilitación

86
Opción de implementar nuevas tecnologías para la rehabilitación de tobillos
¿Considera que los horarios de
atención para la rehabilitación de
tobillos, son suficientes?
¿Cree que es importante utilizar
algunas herramientas terapéuticas,
para rehabilitar los tobillos?
¿Los tiempos de rehabilitación
para tobillos, son suficientes?
¿Es buena la atención
prestada, en el centro de
rehabilitación del instituto de
recreación y deportes?
¿Considera que la cantidad de
terapeutas dedicados a la
rehabilitación de tobillos, es suficiente?
¿Le gustaría poder contar con
alguna tecnología, que
mejore el proceso de
rehabilitación de tobillos?
N° Personas N° Personas N° Personas N° Personas N° Personas N° Personas Si No Si No Si No Si No Si No Si No
10 60 55 15 30 40 5 65 17 53 67 3
CANTIDAD DE PERSONAS ENCUESTADAS: 70

87
Opiniones de la encuesta: 1. El cumplimiento de los horarios para las rehabilitaciones de tobillo, no se siguen al pie de la letra, esto genera que los deportistas busquen este tipo de terapias en otros centros de rehabilitación, mientras otros, realizan sus terapias por cuenta propia en sus hogares. 2. Es necesario contar con algunas herramientas de apoyo para los terapeutas, de tal forma que, ellos puedan atender casos simultáneos, mientras los deportistas, ayudan a la ejecución de ejercicios por cuenta propia. 3. Los tiempos para rehabilitar los tobillos, se determinan con el correcto seguimiento de cada terapia y realización de cada sesión terapéutica, lo que indica, que al no cumplir las citas de rehabilitación, la recuperación de la lesión, puede exceder el tiempo estipulado y generar saturación de pacientes. 4. La atención prestada no es la más eficiente, ya que, existen cruces de horarios con las terapias de diferentes deportistas, en algunas ocasiones no llega el terapeuta y otras veces, el centro de rehabilitación no tiene una base de datos para llevar el seguimiento de las terapias en forma personal. 5. La cantidad de terapeutas no es la indicada, pero la solución podría darse si los mismos pacientes tuvieran una serie de ejercicios guiados en forma grupal, y alguien que llevara el registro de las sesiones trabajadas. 6. Si fuera posible utilizar alguna tecnología, esta deberá ser un apoyo para el terapeuta, permitiendo guiar a otros pacientes, y llevar un mejor control de cada terapia.

88
FICHA TÉCNICA DE OPERACIÓN Nombre paciente: Luis Andrés Torres Rodríguez Edad: 28 años Tipo de lesión: Esguince leve de tobillo Fecha de inicio: 4 febrero de 2016 Nombre de terapeuta a cargo: José Antonio Palomino Antecedentes: No presenta antecedentes por esguinces o fracturas en el tobillo, lo que no implica un tratamiento de mayor complejidad
Observaciones: lesión provocada por una caída, jugando baloncesto durante entrenamiento.
Fecha: 6 febrero de 2016 Descripción: se observa una tonalidad en la piel azulada en un área grande del tobillo, se ha realizado 1 sesión terapéutica de 40 minutos con calentamiento previo. Se observa inicio de una inflamación en el perímetro del tobillo.
Fecha: 10 febrero de 2016 Descripción: se observa una reducción de la tonalidad de la piel, respecto a la inflamación de la evidencia anterior, se han implementado 2 sesiones de 40 minutos, y una ampliación de 10 minutos extras, después de realizar ejercicios programados, a una velocidad mayor en la plataforma asistida.
Fecha: 15 febrero de 2016 Descripción: se evidencia una reducción de la inflamación y tonalidad en la piel más natural, reducción de color azulado en un 50%, se han trabajado 4 sesiones de 40 minutos y un ciclo de 10 minutos en velocidad baja, para relajar músculos y lograr una mayor movilidad en el tobillo. Se observa una mejora en los grados de libertad para mover el pie.

89
Fecha: 20 febrero de 2016 Descripción: se evidencia una tonalidad reducida del color azulado, inflamación reducida en un gran porcentaje, mayor movilidad en los movimientos del tobillo, se han trabajado 6 sesiones de 40 minutos y 1 sesión de 5 minutos en velocidad media, para lograr mayor movilidad del tobillo.
Fecha: 25 febrero de 2016 Descripción: tonalidad de la piel oscura, pero color azulado desaparece, movilidad del tobillo a un 70%, inflamación menor y reducción en el perímetro del tobillo. Se han trabajado 8 sesiones de 30 minutos.
Fecha: 30 febrero de 2016 Descripción: tonalidad de la piel natural a un 80%, inflamación reducida considerablemente, una mayor movilidad en los movimientos de eversión e inversión. Se han trabajado 10 sesiones de 20 minutos, a una velocidad alta, para calentar el tobillo.
Fecha: 4 marzo de 2016 Descripción: tonalidad de la piel natural, movimientos y grados de libertad normales, presencia de dolor desaparecida; inflamación desaparece en un 98 %, se han trabajado 12 sesiones de 15 minutos, en una velocidad media, para distención de los músculos.

90
9.10 Recolección de datos y análisis de resultados
Para llevar a cabo el resultado final, es necesario recolectar algunos datos necesarios, mostrando la funcionalidad del proyecto, en comparación al tiempo de implementación, para ellos se tiene en cuenta la siguiente información:
La reducción de la inflamación del tobillo, se dará por la medida tomada del perímetro del tobillo lesionado, y su evolución al aplicar el proceso de rehabilitación:
Tabla 12. Comparativo perímetro del pie y días transcurridos
Figura 31. Gráfica de reducción perímetro del tobillo vs tiempo de rehabilitación
Días Perímetro del tobillo/ Cm
1 36
3 35,54
5 34,25
7 33,78
9 30,25
11 29,21
13 28,45
15 27,13
17 25,43
19 24,23
21 23,89
23 24,75
25 25,21
27 25,83
29 26,1

91
Se evidencia en el transcurso del tiempo, en el día 13, una estabilidad de la reducción de la inflamación del tobillo, junto con una reducción de la inflamación.
Una de las evidencias para demostrar la funcionalidad del proyecto, está dada en la evolución de la lesión, teniendo en cuenta la coloración de la zona afectada, para ello, es necesario tener en cuenta:
Figura 32. Tonalidad de piel, para esguinces leve de tobillo
Este factor se tomará como recolección de datos, en un porcentaje de recuperación, en la zona afectada:
Tabla 13. Comparativo reducción de hinchazón con tiempo de rehabilitación
DIAS Porcentaje reducción
hinchazón
1 0%
3 5%
5 8%
7 18%
9 27%
11 33%
13 42%
15 55%
17 60%
19 65%
21 75%
23 77%
25 84%
27 90%
29 98%

92
0
10
20
30
40
50
1 2 3 4 5 6
Dorsiflexion
Plantarflexion
Figura 33. Grafica reducción hinchazón vs días de rehabilitación
Se puede evidenciar que el porcentaje de hinchazón aumenta en recuperación, es decir, con el tiempo mejora la coloración de la lesión hasta poder alcanzar la tonalidad casi total de la piel, logrando evidenciar visualmente la recuperación del paciente. (Ver anexo 10)
Finalmente, se podrá tomar los datos sobre los grados de libertad que adquiere el tobillo, después de aplicar el tratamiento, para ello, es necesario tener en cuenta la información evidenciada en la tabla 3; se tomara en cuenta, solo dos movimientos para la toma de evidencias, dorsiflexion y plantarflexion.
El eje x, representa el avance en días y el eje y, los grados de libertad que alcanza, después del tratamiento.
Figura 34. Gráfica grados de libertad vs días de rehabilitación

93
Tabla 14. Comparativo, grados de libertad, con tiempo de rehabilitación
Se puede evidenciar con el transcurso del tiempo, el aumento en los los grados de libertad, es decir, la movilidad del tobillo mejora, hasta poder alcanzar los estándares de flexión, donde el paciente deja de sentir dolor.
Para la etapa final, se hace necesario realizar un comparativo de la evolución en la lesión de esguince leve en tobillo, con dos casos diferentes, uno, evidenciado en la ficha técnica estudiada y otro caso, para un paciente que llevo su proceso de rehabilitación con las opciones disponibles, actualmente, en el instituto de recreación y deporte.
Con esta comparación, se tomara un resultado final, junto con una pequeña encuesta de satisfacción para el paciente, logrando evidenciar un comparativo del proceso. (Ver anexo 10).
Días del 1‐5
Dorsiflexion Plantarflexion
5,26° 6,38°
Días del 6‐10
Dorsiflexion Plantarflexion
8° 10,35°
Días del 11‐15
Dorsiflexion Plantarflexion
15,35° 19,54°
Días del 16‐20
Dorsiflexion Plantarflexion
20° 35,14°
Días del 21‐25
Dorsiflexion Plantarflexion
26,18° 40,2°
Días del 26‐30
Dorsiflexion Plantarflexion
29° 45,7°

94
TRATAMIENTO CON PLATAFORMA ASISTIDA
TRATAMIENTO CON PARÁMETROS DEL INSTITUTO DE RECREACIÓN Y
DEPORTES El tiempo de duración de la rehabilitación, fue de 29 días, para alcanzar la totalidad de recuperación en el paciente. El control de las sesiones y movimientos a trabajar, son regulados por la plataforma asistida. La plataforma posee un indicador de sonido, por medio del celular, para cada sesión de ejercicios, según parámetros programados. Los terapeutas pueden ejecutar su trabajo, teniendo una ficha de ejercicios a trabajar, el tiempo estipulado y la capacitación correspondiente para hacer funcionar la plataforma. La plataforma es una herramienta de apoyo para el terapeuta; se puede manipular desde un celular en forma práctica, ya sea en modo manual o automático.
El tiempo de rehabilitación con las condiciones del instituto, es aproximadamente de 45 a 50 días, ya que la continuidad del tratamiento es interrumpida. Con los horarios de rehabilitación y personal a trabajar, solo se podrán ejecutar para 6 a 10 casos en el mes. La cantidad de sesiones y ejercicios son determinados por el terapeuta, en forma empírica. Para trabajar dos casos simultáneamente, se hace necesario el apoyo al terapeuta, por medio de herramientas, que ayuden a llevar un tratamiento aplicado por el paciente, pero dirigido por el terapeuta. Sin terapeuta, se hace difícil llevar a cabo la rehabilitación del tobillo, ya que, es necesaria la orientación de un profesional que conozca el proceso de rehabilitación adecuado. El centro de rehabilitación en la actualidad, no cuenta con herramientas necesarias para la rehabilitación de tobillos.
Tabla 15. Comparativo de tratamientos
Con las características descritas, se puede observar algunas ventajas al implementar la plataforma asistida. (Ver anexo 10)

95
9.11 Encuesta de satisfacción del uso de la plataforma
¿Cómo evidencia la importancia de la plataforma asistida, para la
rehabilitación de esguinces de tobillo?
¿Le gustaría poder llevar a cabo, futuras
rehabilitaciones de esguinces de tobillo con este
tipo de herramientas?
¿Considera que esta solución,
puede afectar el trabajo del
terapeuta en el futuro?
¿Pudo evidenciar una mejor
respuesta, para el proceso de
rehabilitación de esguinces leve de tobillo con
esta plataforma asistida?
¿Cree que esta solución, puede dar las opciones a futuro para otro tipo de lesiones?
N° Personas N° Personas N° Personas N° Personas N° Personas Buena Mala Si No Si No Si No Si No
20 0 18 2 5 15 20 0 18 2 CANTIDAD DE PERSONAS ENCUESTADAS: 20
Opiniones de la encuesta: 1. Se puede evidenciar, que el tiempo de rehabilitación para esguinces de tobillo mejoro, observando la ficha de rehabilitación del paciente a prueba, pero es necesario implementarlo con grupos grandes, para evidenciar una mejor respuesta de verificación en una muestra mayor. 2. Es bueno poder contar con este tipo de tecnologías para trabajar lesiones del cuerpo humano, pero en ocasiones, se siente mayor seguridad trabajar en las manos del terapeuta, aunque no todo el proceso de rehabilitación lo hace la plataforma, si el paciente así lo exige. 3. El proceso de rehabilitación de esguinces de tobillo, por medio de tecnologías, puede sugerir el tema de desempleo para los terapeutas al implementar este tipo de soluciones, pero se aclara que el objetivo, no es cambiar el terapeuta por un mecanismo, sino el apoyo que requiere el terapeuta, para poder atender muchos más casos. 4. El progreso de rehabilitación es satisfactorio y la capacitación para el uso de la plataforma a través del celular es muy fácil de aprender, lo que da un mayor interés por parte de los deportistas a cumplir sus horarios de rehabilitación, y una ganancia, al aprender a utilizar estas herramientas actuales. 5. Es importante poner en marcha este tipo de soluciones, no solo para esguinces leves de tobillo, sino la opción de ampliar el uso de este tipo de plataformas, a otras zonas del cuerpo humano, de tal forma, que se pueda contar más herramientas en el campo de la kinesiología. (Ver anexo 10)

96
10. RESULTADO ESTUDIO DE CASO
Con el estudio de caso se puede determinar que la plataforma asistida es una buena solución para la rehabilitación de esguinces leves de tobillo, ya que, se reflejan resultados óptimos y se evidencian ventajas en la reducción de tiempos, comodidad a la hora de implementar las terapias de rehabilitación, un mayor control con los movimientos, tiempos y velocidades de los ejercicios a trabajar.
Funciona como respuesta a la problemática del instituto de recreación y deportes del municipio de Soacha, porque trabaja como una herramienta de apoyo al terapeuta y permite trabajar casos simultáneos que, en tiempos pasados, generaba mayor dificultad.
Es un proyecto sirve como una solución independiente para los terapeutas, es decir, puede ser manipulada en forma fácil desde un dispositivo móvil sin mayor dificultad, lo que facilita el aprovechamiento de tiempo y recursos con lo que no contaba antes, el centro de rehabilitación.
Se demuestra la factibilidad del proyecto con hechos claros, que reflejan el objetivo inicial, como solución tangible a una problemática que se evidencia en el municipio de Soacha.
No es una opción que impida la contratación de terapeutas, pero si funciona como herramienta auxiliar para trabajar continuamente un proceso y, poder llevar a cabo otras rutinas de rehabilitación, como calentamientos previos, adecuación de la lesión y acoples de resistencia, frente a los movimientos con los que se debe afrontar cada paciente.
Las encuestas recibieron buena aceptación por parte de los deportistas para implementar este tipo de soluciones, lo que genera una mayor probabilidad de implementación a grupos más grandes, y una solución factible a las problemáticas evidenciadas en el municipio de Soacha, en el instituto de recreación y deportes.

97
11. RESULTADOS Y DISCUSIÓN
En la elaboración del trabajo se puede observar la aplicación de la investigación de campo, aplicando diferentes estudios, desde el estudio exploratorio para describir un fenómeno, del cual no se ha investigado y se quiere documentar, pasando por el estudio descriptivo para desglosar las características que se observan, uniendo estos dos, por el estudio correlacional, y llegando a la implementación del estudio explicativo para buscar las causas y efectos que se producen, al intentar buscar una solución a cada variable del problema.
Al detallar el objetivo general, el cual describe la implementación de un sistema tipo plataforma, como dispositivo de ayuda de los terapeutas en el tema de tratamiento de esguinces leves de tobillo; se tienen en cuenta factores que determinan la funcionalidad del proyecto.
Este tipo de investigación, permite indagar la importancia de aplicar tecnologías en el proceso de rehabilitación de lesiones, brindado una mayor seguridad, un mejor uso de las aplicaciones android y un acoplamiento a las herramientas, que funcionan por redes inalámbricas.
Dentro de los objetivos específicos, se inicia con la búsqueda en la selección de los tipos de plataformas móviles asistidas, después de haber descartado otras posibles soluciones, que se utilizan para la rehabilitación de tobillo; al seleccionar el tipo de plataforma, se concluye el uso de una plataforma asistida programable, la cual, permite abarcar diversas características del problema, como el espacio, funcionalidad, costo, implementación y comodidad.
Teniendo seleccionado la plataforma asistida, se identifican las funciones que esta debe realizar, para establecer parámetros de trabajo, logrando así, un correcto desarrollo del proyecto y el cumpliendo con los objetivos establecidos originalmente.
Es importante tomar una mayor muestra de casos que utilicen la plataforma, para determinar algunas posibles mejoras, que permitan un mayor desarrollo de este tipo de soluciones.
Es importante destacar que dentro de las etapas de desarrollo, se generan problemas de diseño, llevando a la búsqueda de diversas herramientas, que apoyen la finalización del proyecto, extendiendo la investigación y dando una mayor consistencia.

98
12. CONCLUSIONES
En la realización del proyecto se puede determinar las siguientes características:
Es importante tener en cuenta el esfuerzo mecánico de los motores, para tener un margen de tolerancia, que permita cumplir con las especificaciones dadas.
En la programación de las secuencias, se debe tener en cuenta, las opciones de selección de movimiento, tiempo establecido y los ciclos de repetición de cada sesión.
Se deben tener en cuenta los parámetros de funcionamiento para las plataformas móviles, debido a la estructura de funcionamiento, en el proceso de rehabilitación de esguinces, estos parámetros, no puede generar patrones de error, ya que ocasionarían daños mayores en el paciente.
Es importante evidenciar que al inicio de la implementación de la plataforma, se hace necesaria la capacitación del uso de la misma, debido a la falta de experiencia en la manipulación del sistema.
Es indispensable tener en cuenta que la alimentación eléctrica de la plataforma esté disponible, para poder trabajar en un área que brinde comodidad y estética al lugar.
Se debe tener una guía de trabajo para cada terapia, de tal forma que se pueda comparar el tiempo de rehabilitación con el tiempo establecido de trabajo para las terapias en el instituto, esto con el objetivo de determinar qué cantidad de tiempo se redujo implementando la plataforma asistida.
En la programación es fundamental establecer las variables que deben ser programadas, como: tipo de movimiento, la velocidad de la plataforma y la cantidad de ciclos de trabajo, ya que, estas variables, son las pautas básicas para la rehabilitación de esguinces leves de tobillo.
El aporte de la plataforma asistida, generó los resultados esperados, evidenciando una reducción del tiempo, en la rehabilitación del esguince.
La implementación de aplicaciones apps, desde dispositivos móviles, dio una mayor seguridad en los terapeutas, debido al fácil acceso en la actualidad, a este tipo de tecnologías móviles.

99
13. BIBLIOGRAFIA
[1] Y. H. T. a. S. Q. Xie, "DESIGN AND CONTROL OF A PARALLEL ROBOT
FOR ANKLE REHABILITATION” Institute of Electrical and Electronics Engineers, 2008.
[2] I. Z. y. J. Ríos, "APLICACIONES ACTUALES DE LOS ROBOTS PARALELOS,"
presented at the 8° Congreso Iberoamericano de Ingeniería Mecánica, 2007.
[3] Gabriel Gómez “APLICACIONES MEDICAS DE LA ROBOTICA” grupo de robótica y sistemas integrados.
[4] Jonathan Didier Peña, “METODOLOGIA PARA EL DISEÑO DEUN ROBOT
PARALELO INDUSTRIAL TIPO DELTA”, Universidad pontificia bolivariana.
[5] GARCÍA J. A; RAMÍREZ D. A; GARCÍA U; CORTÉS J. E; CIFUENTES A. F; RODRÍGUEZ, S. Diseño hacia ensamble y manufactura de un prototipo robótico experimental tipo Delta. En: Intekhnia. Junio 2011, 6 Vol. ISSN: 1900 7612.
[6] MARTINEZ, E; PEÑA C. Diseño óptimo de un robot paralelo con configuración delta para aplicaciones educativas. En: Educación en Ingeniería. Diciembre, 2010, 10 ed. ISSN 1900-8260
[7] C. d. C. a. Desenvolupament, "Rehabilitación y Fisioterapia”.
[8] C. E. S. a. I. Z. Emiris, "A PARALLEL ROBOT FOR ANKLE
REHABILITATION-EVALUATION AN ITS DESIGN ESPECIFICATIONS," Institute of Electrical and Electronics Engineers, 2008.
[9] M. B. Estrada, "DISEÑO Y CONTROL DE ROBOT PARALELO (Plataforma de
Stewart)," ed, 2001.
[10] BALLOU, R.; LACROIX, C. 2009. Líquidos y hielos de espín. Investigación y ciencia, 391, 53-61. ISSN 0210-136X.
[11] Guirao Ll, Martínez C, Iborra J, Pages E, Jou N, Cuxart A. Lesiones
ligamentosas del tobillo. Orientación diagnóstica y terapéutica. Rehabilitación (Madr) 1997; 31: 304-10.

100
[12] Sandor R, Brone S. Rehabilitating ankle sprains. The Physician and Sports Medicine 2002; 30:1002-10.
[13] Barrois B, Ribinik P, Davenne B. Entorses de cheville. En: Encycl Méd Chir,
Kinésithérapie physique-réadaptation, 26-250-D-10, 2002; p. 14.
[14] N. G. T. J.A. Saglia, J.S. Dai y D.G. Caldwell, "INVERSE-KINEMATICS-BASED CONTROL OF A REDUNDANTLY ACTUATED PLATFORM FOR REHABILITATION," Institute of Electrical and Electronics Engineers, 2008.
[15] N. G. T. Jody A. Saglia, Jian S. Dai and Darwin G. Caldwell, "A HIGH
PERFORMANCE 2-dof OVER-ACTUATED PARALLEL MECHANISM FOR ANKLE REHABILITATION," Institute of Electrical and Electronics Engineers, 2009.
[16] J. L. Judith E. Deutsch, Grigore C. Burdea, Rares Bojan, "Post-Stroke
Rehabilitation with the Rutgers Ankle System," Institute of Electrical and Electronics Engineers, 2001.
[17] J. A. B. Leon, "DISEÑO, ANALISIS Y CONSTRUCCION DE UN ROBOT
PARALELO TRASLACIONAL," Maestro en Ciencias, Tecnologia Avanzada, Instituto Politecnico Nacional, Mexico D.F., 2009.
[18] M. M. C. Mario Garcia-Sanz. (2005) HERRAMIENTAS PARA EL ESTUDIO
DE ROBOTS DE CINEMATICA PARALELA: SIMULADOR Y PROTOTIPO EXPERIMENTAL. Revista Iberoamericana de Automatica e Informatica Industrial.
[19] V. M. Miguel Diaz-Rodriguez, Nidal Farhat y Sebastian Provenzano. (2009)
DYNAMIC PARAMETER IDENTIFICATION OF PARALLEL ROBOTS STARTING FROM THE MEASUREMENT OF JOINTS POSITION AND FORCES. Revista Tecnica de Ingeniería Universitaria de Zulta.
[20] K.-M. L. a. D. K. Shah, "KINEMATICS ANALYSIS OF A THREE DEGREES
OF FREEDOM IN-PARALLEL ACTUATED MANIPULATOR," 1990.
[21] http://www.dane.gov.co/files/censo2005/PERFIL_PDF_CG2005/25754T7T000.PDF
[22] http://pdf1.alldatasheet.com/datasheet-pdf/view/8744/NSC/LM2596.html

101
[23] http://pdf1.alldatasheet.com/datasheet-pdf/view/431748/LUMEX/LCM-S01602DSR-A.html
[24] http://cdn.makezine.com/uploads/2014/03/hc_hc-05-user-instructions-
bluetooth.pdf
[25] http://pdf1.alldatasheet.com/datasheetpdf/view/75016/MICROCHIP/PIC16F877.html
[26] http://www.coldfire-electronica.com/esp/item/26/6/servomotor-towerpro-
mg995-15kg-cm
[27] http://www.eng.newcastle.edu.au/~jhb519/teaching/caut1/Apuntes/PID.pdf
[28] http://www.herrera.unt.edu.ar/controldeprocesos/tema_4/Tp4a.pdf
[29] http://www.portalaprende.co/LPRecursos/MaterialDidactico/MecanismosDeMaquinas/Pdf/SintesisDeMecanismos.pdf

102
14. ANEXOS
Anexo 1
Entrevista 1. ¿Por qué se dedica a lesiones de esguince leve en tobillo y no lesiones de tobillo
general? Respuesta: Las lesiones de esguince de tobillo se clasifican en graves y leves, las primeras no se pueden tratar solo con ejercicios de rehabilitación común, llevan un seguimiento más riguroso y deben ser orientadas con un especialista, de tal manera, que este tipo de lesión no se tratan en este lugar y, las lesiones de esguince leve, si se pueden trabajar con ejercicios específicos en forma fácil y segura. 2. ¿Cuál es la dificultad al tratar este tipo de lesiones en general?
Respuesta:
Que se deben tener en cuenta factores fundamentales para tener un buen control de la rehabilitación del tobillo, entre estos factores: los tipos de movimiento, la cantidad de repeticiones a seguir, la fuerza aplicada, los grados de libertad al cual se puede someter el tobillo, la disposición de tiempo y el interés de los pacientes por asistir en forma cumplida a sus terapias. 3. ¿Cuáles son las problemáticas que usted detecta en el centro deportivo General
Santander, respecto a la rehabilitación de esguinces leves de tobillo?
Respuesta: Existen diversas problemáticas, primero no se cuenta con herramientas especializadas para trabajar estas lesiones, los pacientes incumplen los horarios de atención, el espacio es reducido para trabajar varios pacientes al mismo tiempo, no se puede trabajar con más de 1 paciente ya que cada uno necesita una terapia diferente con tiempos determinados, algunos veces, terapeutas auxiliares que realizan reemplazos no conocen el proceso a seguir para la rehabilitación y,

103
finalmente, la mezcla de todos estos factores y la falta de más horarios para los pacientes, genera una saturación de personas a la hora de llevar a cabo este trabajo. 4. ¿Por qué se habla del cumplimiento de los pacientes y el factor tiempo, como
fundamento para una buena rehabilitación de tobillo? Respuesta: Es importante que las terapias no sean interrumpidas, muchas veces, los deportistas no asisten a sus terapias en los horarios establecidos, debido a la falta de tiempo en las terapias y la saturación de pacientes en el lugar, agregando la falta de herramientas para los procesos de rehabilitación. 5. ¿Por qué no extender más horarios de trabajo para las terapias? Respuesta: Porque estos casos de rehabilitación de esguince de tobillo leve, deben ser un poco más personalizados, lo que requiere, o extender el tiempo de trabajo o tratar varios casos simultáneamente, y el problema es que, no se cuenta con ayudantes ni personas de apoyo que puedan estar disponibles en otros horarios; el instituto no ha llevado el proceso para contratar más personal por algunas horas, (problema que se ve evidenciado hace varios años) ya que, eso genera mayores costos, de los cuales, nadie se hace responsable y el espacio no es suficiente para trabajar varias personas. 6. ¿Cuáles pueden ser algunas soluciones a esta problemática? Respuesta: Hasta la fecha no existe alguien que se responsabilice por arreglar este problema, no existen recursos, en ocasiones los terapeutas no llegan porque no les gusta el exceso de trabajo, los pacientes se aburren de llegar al lugar y no encontrar nada, lo que hace que ellos también incumpla con las terapias. Se ha pasado la propuesta para cambiar el lugar para las terapias, por otro de mayor área, pero a la fecha no se cuenta con ninguna respuesta.

104
7. ¿Cuánto es el tiempo prudente para lograr la rehabilitación de un esguince de tobillo leve? Respuesta: El tiempo necesario es aproximadamente entre 20 a 30 días dependiendo la cantidad de sesiones que se trabajen y los ejercicios que se lleven a cabo, teniendo en cuenta que se debe asistir cumplidamente a cada sesión, ya que, si no hay seguimiento constante, no se garantiza el tiempo de recuperación prudente. 8. ¿Conoce usted alguna tecnología implementada para este tipo de lesiones? Respuesta: La verdad no conozco que tipo de tecnología o máquina que pudiera ayudar para esta problemática, pero si en lo posible existiera una solución, sería muy valioso intentar aplicar esta solución para este lugar.
Anexo 2.
Código fuente
#include <16f873a.h> //librería para control del pic16f873a #fuses XT,NOWDT,PROTECT,NOLVP //bits de configuration #use delay(clock=4000000) //frecuencia de reloj 4 MHz #use rs232(uart1, baud=9600, parity=N, xmit=PIN_C6, rcv=PIN_C7, STOP = 1, bits=8) #include <flex_lcd.c> //archivo para control del lcd #bit Bit_PWM1=PORTC.1 //Bit 1 puerto C Salida modulación 1 #bit Bit_PWM2=PORTC.2 //Bit 2 puerto C Salida modulación 2 #bit Bit_PWM3=PORTC.3 //Bit 3 puerto C Salida modulación 3 #bit Bit_PWM4=PORTC.4 //Bit 4 puerto C Salida modulación 4 int pwm; //valor de la modulación por teclado int Rx, flag=2, cX=22, cY=22,modo=0; int config=0; int PWM1=0,PWM2=0; int control_PWM=0; int valor, flag; int controlsignal; float a= 2.0; //KP

105
float b =0.0031;//Ki=(Ki*T)/2=0.0031 float c=6.215; //Kd=Kd/T=6.215 float SETPOINT=90.0; float eT=0.0; float iT=0.0; float dT; float yT; float uT; float iT0; float eT0; float max=1000.0; float min=0.0; //rutina que visualiza coordenadas recibidas para posicion de motores modo manual void mostrar(void) { disable_interrupts(global); lcd_send_byte(0,0x01); //LIMPIA EL LCD delay_ms(2); lcd_gotoxy(4,1); printf(lcd_putc,"MODO MANUAL"); lcd_gotoxy(4,2); printf(lcd_putc," "); lcd_gotoxy(11,2); printf(lcd_putc," "); lcd_gotoxy(1,2); printf(lcd_putc,"cX:%i",cX-22); lcd_gotoxy(8,2); printf(lcd_putc,"cY:%i",-cY+22); enable_interrupts(global); } //rutina que genera el pwm de control de los motores void pwm_gen(void) { angulo=cX*0.65; control_pwm=angulo; set_pwm1_duty(PWM1*angulo);//realiza una compensacion para ubicar correctamente el motor X Bit_PWM3=~Bit_PWM1;//genera el complemento para mover el motor X angulo=cY*0.65; control_pwm=angulo; set_pwm2_duty(PWM1*angulo);//realiza una compensacion para ubicar correctamente el motor Y Bit_PWM4=~Bit_PWM2;//genera el complemento para mover el motor Y

106
} //rutina de interrupcion de USART para recepcion de datos #INT_RDA void RDA_isr(void) { Rx=getc(); //captura el dato if(Rx=='s') { disable_interrupts(global); lcd_send_byte(0,0x01); delay_ms(2); lcd_gotoxy(1,1); printf(lcd_putc,"SELECCIONE MODO"); porta=1; modo=0; flag=0; enable_interrupts(global); } if(Rx=='a') { disable_interrupts(global); lcd_send_byte(0,0x01); delay_ms(2); lcd_gotoxy(1,1); printf(lcd_putc,"MODO AUTOMATICO"); porta=4; modo=2; flag=0; enable_interrupts(global); } if(Rx=='M' || Rx=='V') { switch(Rx) { case 'M': flag=1; break; case 'V': flag=2; break; } Rx=getc(); switch(flag) { case 0: break;
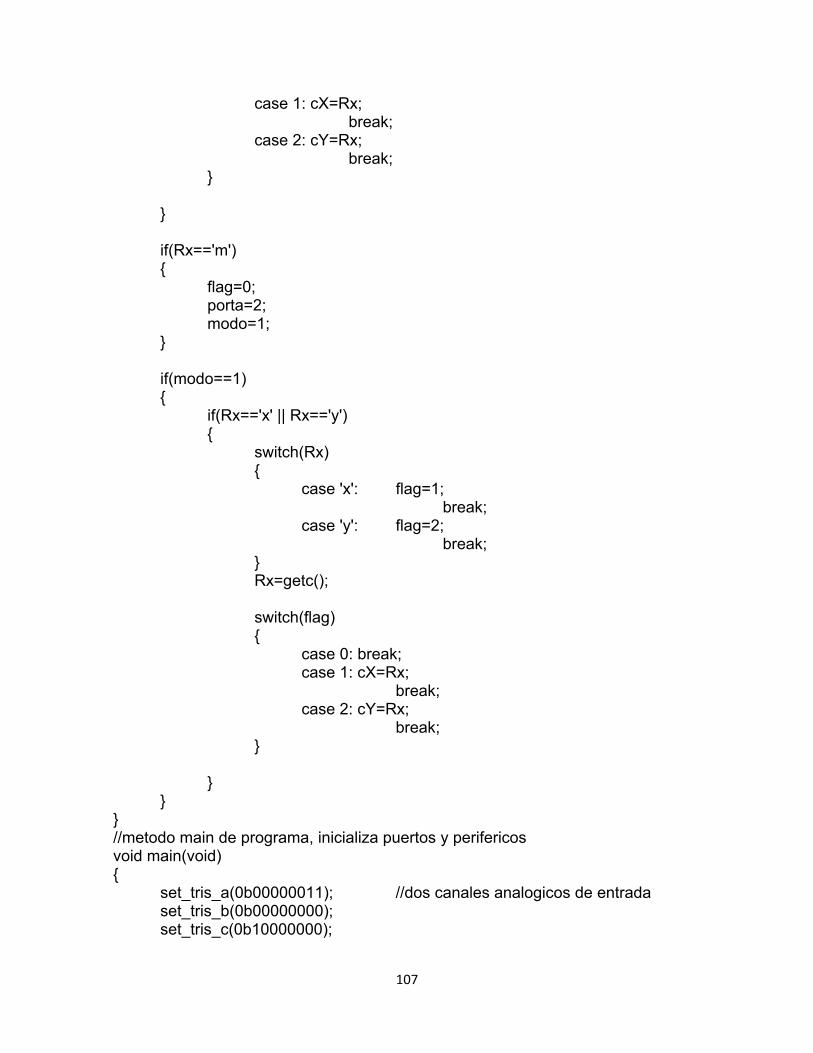
107
case 1: cX=Rx; break; case 2: cY=Rx; break; } } if(Rx=='m') { flag=0; porta=2; modo=1; } if(modo==1) { if(Rx=='x' || Rx=='y') { switch(Rx) { case 'x': flag=1; break; case 'y': flag=2; break; } Rx=getc(); switch(flag) { case 0: break; case 1: cX=Rx; break; case 2: cY=Rx; break; } } } } //metodo main de programa, inicializa puertos y perifericos void main(void) { set_tris_a(0b00000011); //dos canales analogicos de entrada set_tris_b(0b00000000); set_tris_c(0b10000000);

108
output_high(pin_c0); //habilita el enable del driver de los motores lcd_init(); //Inicialización del lcd SETUP_ADC_PORTS(AN0_AN1_AN3);//configura los canales analogicos setup_adc(adc_clock_internal);//Selecciona el reloj de conversion setup_ccp1(CCP_PWM); // Configure CCP1 como PWM setup_timer_2(T2_DIV_BY_16, 199, 1); // seleccion de 500Hz enable_interrupts(INT_RDA); //habilita la int de Rx enable_interrupts(GLOBAL); //Habilitación de las interrupciones set_timer0(255); //Carga del contador config++; //rutina de control PID de posicion de motores while(config !=0)// asegura mantener un loop solo en esta rutina y no volver a cambiar la configuracion inicial { //conversion para determinar posicio motor X set_adc_channel(0);//Selecciona el canal de conversion delay_us(25); r=read_adc();//Conversion A/D la almacena en r en un binario de 0-1024 delay_ms(2); valor=(r/1024.0)*5;//Convierte de binario a voltaje yT = 1000.0*valor;//Escala para obtener la entrada de 0 a 1000 eT = SETPOINT-yT; //cálculo del error iT = b*eT+iT0; //cálculo de la componente integral dT = c*(eT-eT0); //cálculo de la componente derivativa uT = iT+a*eT+dT; //cálculo de la señal de respuesta del controlador if(uT>=max) { uT = max; //Estableciendo límite superior de la respuesta } else { if(uT<=min) { uT = min; //Si está la respuesta por debajo de cero se ubica al mínimo }

109
} PWM1=uT; //asigna el valor de ciclo util para el pwm motor X //conversion para determinar posicio motor Y set_adc_channel(1);//Selecciona el canal de conversion delay_us(25); r=read_adc();//Conversion A/D la almacena en r en un binario de 0-1024 delay_ms(2); valor=(r/1024.0)*5;//Convierte de binario a voltaje yT = 1000.0*valor;//Escala para obtener la entrada de 0 a 1000 eT = SETPOINT-yT; //cálculo del error iT = b*eT+iT0; //cálculo de la componente integral dT = c*(eT-eT0); //cálculo de la componente derivativa uT = iT+a*eT+dT; //cálculo de la señal de respuesta del controlador if(uT>=max) { uT = max; //Estableciendo límite superior de la respuesta } else { if(uT<=min) { uT = min; //Si está la respuesta por debajo de cero se ubica al mínimo } } PWM2=uT; //asigna el valor de ciclo util para el pwm motor Y pwm_gen(); //llama a la rutina que genera el nuevo pwm a los motores } }

Anexo 3


112
Diagrama de Gantt
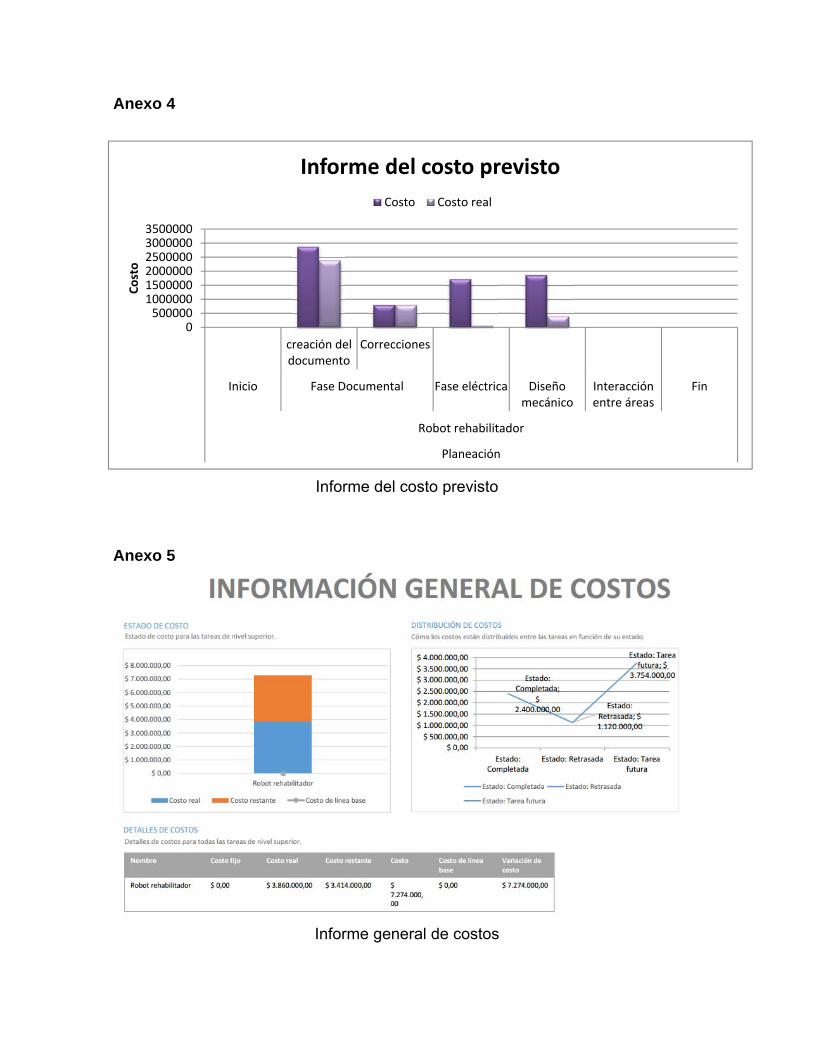
Anexo 4
Informe del costo previsto
Anexo 5
Informe general de costos
0500000100000015000002000000250000030000003500000
creación deldocumento
Correcciones
Inicio Fase Documental Fase eléctrica Diseñomecánico
Interacciónentre áreas
Fin
Robot rehabilitador
Planeación
Costo
Informe del costo previsto
Costo Costo real

114
020040060080010001200140016001800
Sin asignar Documentación1
Diseño eléctrico Diseño mecánico Documentacion2
Trabajo
Trab
ajo
Informe del resumen de trabajo de los recursos
Disponibilidad trabajo Trabajo Disponibilidad restante Trabajo real
Anexo 6
Informe del trabajo presupuestado
Anexo 7
Informe del resumen de trabajo de los recursos
0
100
200
300
400
500
600
T1 T2 T3 T4
2015
Trab
ajo
Informe del trabajo presupuestado
Trabajo presupuestado Trabajo previsto Trabajo Trabajo real
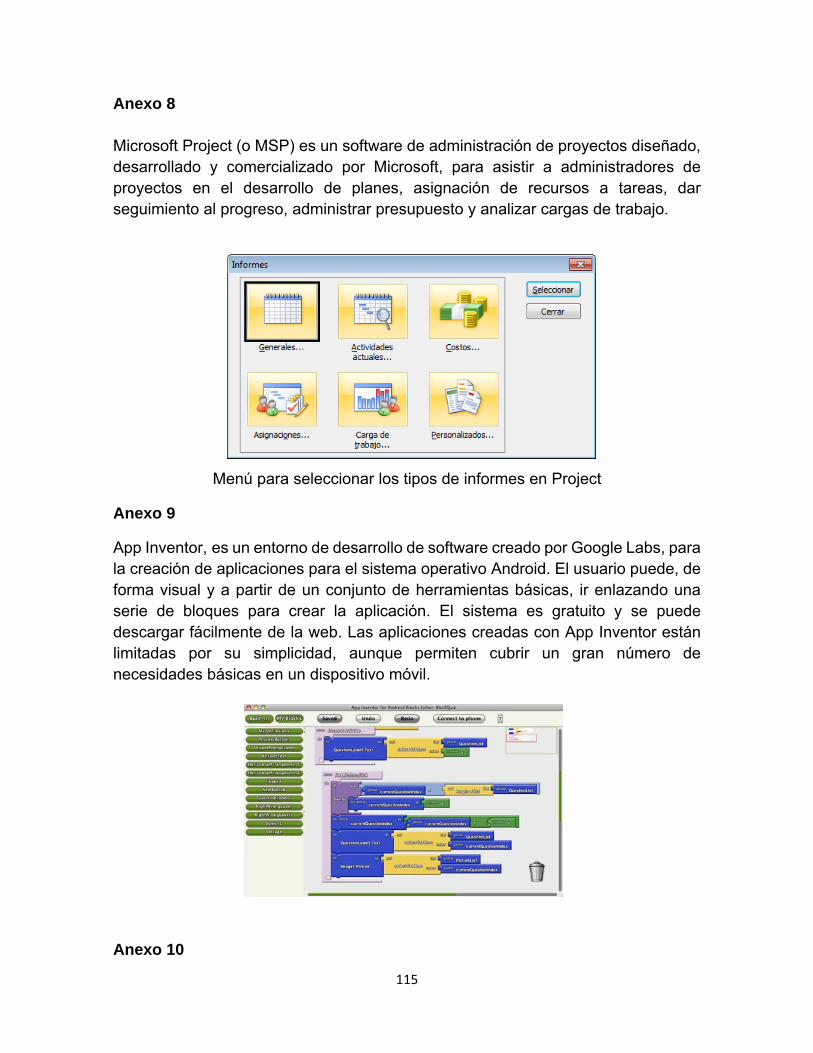
115
Anexo 8 Microsoft Project (o MSP) es un software de administración de proyectos diseñado, desarrollado y comercializado por Microsoft, para asistir a administradores de proyectos en el desarrollo de planes, asignación de recursos a tareas, dar seguimiento al progreso, administrar presupuesto y analizar cargas de trabajo.
Menú para seleccionar los tipos de informes en Project
Anexo 9
App Inventor, es un entorno de desarrollo de software creado por Google Labs, para la creación de aplicaciones para el sistema operativo Android. El usuario puede, de forma visual y a partir de un conjunto de herramientas básicas, ir enlazando una serie de bloques para crear la aplicación. El sistema es gratuito y se puede descargar fácilmente de la web. Las aplicaciones creadas con App Inventor están limitadas por su simplicidad, aunque permiten cubrir un gran número de necesidades básicas en un dispositivo móvil.
Anexo 10

116
Ciclo PMW
Anexo 11
Plataforma asistida con banda transportadora
Anexo 12

117
Carta de aprobación, aplicación proyecto de grado
Anexo 13

118
Certificación de resultados proceso de rehabilitación es esguince de tobillo.