sistema de control de velocidad de una centrífuga148.206.53.84/tesiuami/uami17166.pdf · corriente...
TRANSCRIPT

Universidad Autónoma Metropolitana
Unidad: Iztapalapa
División de Ciencias Básicas e Ingeniería
Proyecto terminal:
SISTEMA DE CONTROL DE VELOCIDAD DE UNA
MAQUINA CENTRÍFUGA
Para obtener el grado de:
Licenciatura en Ingeniería Biomédica
Presenta: Efrén Huitrón Peralta

Índice
Dedicatoria ........................................................................................... i
Agradecimientos .................................................................................. ii
Justificación .......................................................................................... iii
Hipótesis ................................................................................................ v
Objetivos ................................................................................................ vi
Objetivo general ................................................................. vi
Objetivo especifico ............................................................ vi
Alcances del proyecto ...................................................................... vii
Vialidad del proyecto ......................................................................... vii
CAPÍTULO 1: Marco Teórico .............................................................. 1
1.1 Centrifugación ....................................................................... 1
1.1.1 Tipos de centrifugación ............................................ 2
1.1.2 Fundamentos de centrifugación ............................ 3
1.1.2.1 Procesos de Centrifugación ........................ 5
1.1.2.2 Fuerza Centrífuga .......................................... 7
1.1.3 Funcionamiento de una centrífuga ............. 8
1.2 Sistemas de control (SC) ...................................................... 9
1.2.2 Tipos de SC ................................................................. 10
1.2.3 Antecedentes de los SC........................................... 10
1.2.4 Diagrama representativo de un SC ....................... 11
1.2.5 Clasificación de los SC ............................................. 12
1.2.6 Alcances de los SC ................................................... 16
1.3 Tarjeta digital: Arduino ......................................................... 16

1.3.1 Ventajas ...................................................................... 17
1.4 Centrífuga y Sistema de control ......................................... 19
CAPITULO 2: Parte Experimental ........................................................ 22
2.1 Material utilizado ................................................................... 22
2.2 Parte Analógica .................................................................... 23
2.3 Parte de Potencia ................................................................. 25
2.4 Parte Digital ....................................................................... 30
2.4.1 Código Fuente ........................................................... 31
2.4.2 Comando PWM ......................................................... 40
CAPITULO 3: Resultados y conclusiones .......................................... 42
3.1 Análisis de Resultados .......................................................... 42
3.2 Conclusiones ......................................................................... 54
Índice de Tablas ................................................................................... 56
Índice de Figuras .................................................................................. 57
Referencias ........................................................................................... 59

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
i
Dedicatoria
A MIS PADRES:
Por su apoyo e impulso para seguir adelante, les agradezco todo lo que
han hecho por mí, sin ustedes no sería la persona que soy y no estaría aquí
en este momento
A mi hermano:
A ti te dedico mi logro y solo quiero decir gracias por creer en mí.
A mi novia:
Que siempre fue un apoyo incondicional a lo largo de toda mi carrera

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
ii
Agradecimientos
Quiero agradecer principalmente a mi asesor al Ing. Donaciano Jiménez
Vázquez por el apoyo, y por resolver todas las dudas que surgieron en el
transcurso de la elaboración de este proyecto terminal, gracias por
mostrarme siempre optimista ante cualquier situación ,sin su ayuda no se
hubiese podido lograr la meta propuesta.
A la Universidad Autónoma Metropolitana por todas las enseñanzas.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
iii
Justificación
En el ámbito de la medicina los equipos de laboratorio clínico tienen
un aspecto muy importante, ya que son donde se empiezan a realizar
mediciones para que el médico tenga un valor certero para poder dar un
diagnóstico.
Para esto tenemos equipos como son las centrífugas de laboratorio
clínico, que nos proporciona la técnica de separación basada en el
movimiento de partículas por rotación y aceleración centrífuga, de modo
que, sometidas a altas velocidades durante cortos periodos de tiempo,
permiten la sedimentación de los componentes de una solución
homogénea según sus diferentes densidades.
De esta manera, dicha solución queda finalmente separada en dos
fracciones, la fracción sobrenadante y la fracción sedimentada que
queda depositada en el fondo del tubo de centrifugación.
Extensamente empleada en los campos de la Biología, la Bioquímica
o la Medicina, la centrífuga es un equipamiento básico en los laboratorios

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
iv
de análisis para la separación y purificación de numerosas
macromoléculas (proteínas, DNA, RNA, células o fracciones celulares).
Aún con la gran importancia que tienen estos dispositivos, no existe
mucha investigación dirigida a mejorarlos. Una de las formas es, como se
propone en este proyecto, implementar un sistema de control de
velocidad por medio de una tarjeta electrónica y un circuito de potencial.
Además de ser una propuesta muy bien analizada, ayudará a diagnósticos
más confiables y tiempos de respuesta más rápidos.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
v
Hipótesis
Los sistemas de control de velocidad en la mayoría de las centrifugas
se realizan de forma manual, esto es utilizando un potenciómetro y
calculando la velocidad de manera aproximada. Lo que se traduce en la
imprecisión de la máquina, y como consecuencia existirán errores de
apreciación clínica, debido a que diversas sustancias requieren de una
velocidad RPM especifica. Las modificaciones de este proyecto obtendrán
un mejor diagnostico de determinada patología.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
vi
Objetivos
Objetivo general
Emplear los sistemas electrónicos para el diseño de control de
velocidad de motores universales.
Objetivo especifico
Diseñar un sistema de control electrónico de velocidad para un motor de
corriente alterna de una centrifuga convencional, para mejorar la lectura
de la sustancia y por lo tanto dar un mejor diagnostico en exámenes
clínicos.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
vii
Alcances del proyecto
Este proyecto se llevará a cabo a partir de la construcción del
prototipo de un circuito de potencia que realiza la función analógica, una
tarjeta llamada Arduino que realiza la parte digital y un motor universal.
La programación se realizó en Visual Basic en comunicación con
Arduino, para darle una aplicación real al motor como una centrifuga.
Vialidad del proyecto
La elaboración de este proyecto es factible ya que contamos con
dispositivos electrónicos, una tarjeta digital (Arduino), un software y un
motor universal para montar el prototipo, se tiene también la asesoría del
profesor ya que es experto en el tema.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
1
CAPÍTULO 1:
Marco Teórico
En este proyecto se desarrolla un control digital para una centrífuga
de uso clínico. Las centrífugas son instrumentos que utilizan el principio físico
de centrifugación, que es la separación de partículas en una solución.
Generalmente lo utilizan para separar plasma sanguíneo, y usar el suero
para diversos análisis clínicos, en la mayoría de casos se controlan de
forma manual, utilizando un potenciómetro, por lo tanto se tiene siempre
un rango de incertidumbre en el control.
El prototipo experimental que se va a montar deberá poseer un
control de seguridad y precisión en la velocidad de rotación. Para ello se
utiliza un sistema de control electrónico que permita tener las lecturas de
las revoluciones. Esta señal de realimentación será procesada en un
circuito con micro controlador, el cual tomará acción sobre el motor,
controlando así la velocidad.
Algunas características importantes en este diseño son: el sistema de
seguridad, el indicador de velocidad, tiempo numérico y en barra, entre

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
2
otras. Estas características permiten que el diseño presentado en este
proyecto terminal tenga un mejor control de velocidad, y como
consecuencia un mejor diagnostico en la sustancia para el tratamiento de
enfermedades.
1.1 Centrifugación
La centrifugación es una de las técnicas de investigación más
importantes y de mayor aplicación en bioquímica, biología celular y
molecular y en medicina. Es un método por el cual se pueden separar
sólidos de líquidos de diferente densidad mediante una centrifugadora, la
cual imprime a la mezcla un movimiento rotatorio con una fuerza mayor
que la de la gravedad, provocando la sedimentación de los sólidos o de
las partículas de mayor densidad.
El objetivo de la centrifugación es separar partículas de diferentes
características. Para ello, se aplica un fuerte campo centrífugo, con lo cual
las partículas tenderán a desplazarse a través del medio en el que se
encuentren con la aceleración G.
El tipo de centrifugación depende de las características del solvente y
soluto, estas pueden ser las siguientes.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
3
1.1.1 Tipos de centrifugación
Centrifugación diferencial: diferencia en la densidad de las
moléculas. Esta diferencia debe ser grande al centrifugar: Las
partículas que posean densidades similares, como centrifugación
preparativa para separar componentes en la mezcla (por ejemplo,
para separar mitocondrias de núcleos y membrana) útil para separar
moléculas.
Centrifugación ISO pícnica: También llamada centrifugación Zonal.
Las partículas se separan al usar medios de diferente densidad.
Ultra centrifugación: Permite estudiar las características de
sedimentación de estructuras subcelulares (lisosomas, ribosomas y
microsomas) y biomoléculas. Utiliza rotores (fijos o de columpio) y
sistemas de monitoreo. Existen diferentes maneras de monitorear la
sede las partículas en la ultra centrifugación.
Para el cual se construyó un sistema de control de velocidad por medio
de un circuito de potencia y una tarjeta digital.
1.1.2 Fundamentos de centrifugación
Las centrífugas son una aplicación práctica de las leyes del
movimiento de Newton. Cuando un cuerpo de masa [m] gira alrededor de

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
4
un punto central [O], experimenta una fuerza [N] denominada centrípeta
en la dirección del eje de rotación, de magnitud igual N = -mω2R, donde:
[m] es la masa del cuerpo, [R] el radio de giro y w la velocidad angular. La
centrífuga dispone de un eje –giratorio– sobre el cual se encuentra
montado un elemento denominado rotor, el cual dispone de un sistema de
alojamiento, donde se colocan las muestras. La velocidad tangencial
viene dada por la ecuación
Vt = wR. (2.1)
Figura 1: concepto de fuerza centrifuga
Cuando el sistema gira a una velocidad de ω radianes por segundo,
las muestras "parecen sentir" una fuerza Fp, de la misma magnitud de N,
pero de sentido contrario. A esta fuerza comúnmente se la conoce como
fuerza centrífuga. Dicha fuerza actúa sobre las partículas de la sustancia
que está siendo centrifugada, produciendo que la misma se separe como
resultado de las diferencias de densidad, de forma que en el fondo del
tubo estarán las partículas más densas, las cuales se sedimentan en

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
5
períodos de tiempo más cortos, mientras que las más ligeras requieren de
mayores tiempos de centrifugación para poder sedimentarse, y se
encuentran depositadas sobre las de mayor densidad. La relación entre la
aceleración centrífuga [w] a un radio dado [r] y la fuerza de la gravedad
[g] se conoce como campo o fuerza centrífuga relativa.
Cuando se centrífuga una solución, se rompe la homogeneidad y se
produce la separación del soluto y del disolvente. Las primeras partículas
en sedimentar son las de mayor masa. En la Fig. 2 se muestra las fuerzas
que actúan sobre la partícula, entre ellas tenemos la fuerza centrifuga (Fc),
fuerza de resistencia (Fd), peso de partícula (P), y empuje (E).
Figura: 2. Tipos de fuerza
Para tener lectura de la sedimentación se usa el svedber como unidad de
sedimentación, 1 svedber (S) es igual a10- 13 segundos. El svedber se
relaciona con la velocidad de sedimentación (Vs), radio de giro (r) y la
velocidad angular (ω) a través de:
S=Vs/r 2 (1) (2.2)

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
6
1.1.2.1 Procesos de Centrifugación
La centrifugación preparativa. Cuyo objeto es aislar partículas
específicas. Dentro de la centrifugación preparativa hay dos métodos
esenciales de separación: la centrifugación diferencial y la centrifugación
en gradiente de densidad (zonal e isopícnica).
La centrifugación analítica. Con la que se pretenden estimar
propiedades físicas de alguna partícula en concreto: sus propiedades
hidrodinámicas.
Una centrífuga es una máquina que pone en rotación una muestra
para separar por fuerza centrífuga sus componentes o fases (generalmente
una sólida y una líquida), en función de su densidad.
Existen diversos tipos de centrífugas, comúnmente para objetivos
específicos.
Una aplicación típica consiste en acelerar el proceso de
sedimentación, dividiendo el plasma y el suero en un proceso de análisis
de laboratorio. También se utiliza para determinar el grupo sanguíneo
mediante una toma de muestra capilar. En este caso la máquina utilizada
se denomina micro centrífuga.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
7
Otra aplicación de las centrífugas es la elaboración de aceite de
oliva. En ella las aceitunas una vez molidas y batidas se introducen en una
centrífuga horizontal en la que se separa el aceite que es la fracción
menos pesada del resto de componentes de la aceituna; agua, hueso,
pulpa etc.
Los principales parámetros son:
La velocidad
La aceleración
La desaceleración, y el frenaje.
La temperatura para el sistema de refrigeración.
Figura 3: Representación de la fuerza centrifuga en el rotor

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
8
1.1.2.2 Fuerza Centrífuga
Fuerza centrífuga es la que tiende a alejar los objetos del centro de
rotación del eje mediante la velocidad tangencial, perpendicular al radio,
en un movimiento circular.
La fuerza centrífuga es una de las fuerzas ficticias que parecen
actuar sobre un objeto cuando su movimiento se describe según un
sistema de referencia en rotación.
La fuerza centrífuga es producto de la reacción ejercida por
un objeto que describe un recorrido circular sobre el objeto que
causa ese movimiento curvo, según la tercera Ley de Newton. En
realidad es sólo el efecto de la inercia en un movimiento circular, no
es causada por la interacción de otro cuerpo físico.
La fuerza centrífuga surge cuando analizamos el movimiento de un
objeto desde un sistema de referencia no inercial, o acelerado, que
describe un movimiento circular uniforme.
La fuerza centrífuga será el producto de la masa por la aceleración
centrífuga, en un sistema de referencia no inercial.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
9
1.1.3 Funcionamiento de una centrífuga
Básicamente las centrífugas consisten en un motor de corriente
alterna en posición vertical, que impulsa a una cámara de centrifugación
la cual se encuentra cerrada y provista de una tapa de seguridad, y un
sistema electrónico que controla las diversas características del equipo.
(Tiempo, velocidad, frenado, temperatura, etc.).
Las partículas y su medio de suspensión son colocados en tubos que
van a un rotor, y debido a una velocidad específica, se genera una fuerza
centrípeta que origina que las partículas migren más rápidamente hacia
una dirección lejos del eje de rotación.
Algunas centrífugas tienen un sistema electrónico digital, que
mediante sensores ubicados en el motor pueden registrar y controlar la
velocidad de trabajo, usando para este fin dispositivos para controlar la
potencia aplicada al motor de accionamiento.
También controlan el tiempo de centrifugado e inclusive el frenado.
Estos equipos tienen un sensor dentro de la cámara que registra la
temperatura dentro de la misma.
Las centrífugas de gran envergadura y sofisticación, tienen un sensor
de vibración, que interrumpe el suministro de energía hacia el motor si es
detectado cierto nivel de vibración del eje del rotor, que de ser muy
pronunciado, podría generar daños al equipo y a la muestra en análisis.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
10
Figura 4: Equipo y sus principales partes.
1.2 Sistemas de control (SC)
El concepto de control está presente en diversas disciplinas (ingeniera,
biología, economía, sociología, etc.), y si bien la palabra “control indica
fundamentalmente, mando, verificación regulación, puede tener
connotaciones particulares sea el campo de aplicación.
Para introducirnos en el tema comenzaremos analizando el cuerpo
humano, normalmente su cuerpo permanece constante, cualquiera sea la
temperatura del medio que lo rodea o la actividad que realiza; esto se
debe que tiene a que tiene un complejo sistema de control de
temperatura (control de regulación), que entre sus mecanismos de
termorregulación tiene uno que lo hace transpirar cuando la temperatura
sube o lo hace temblar cuando la temperatura baja. Adema posee otro
sistema (cuyo centro está en el cerebro) que controla sus movimientos

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
11
musculares (control de posición que le posibilita desarrollar sus
actividades).
1.2.2 Tipos de SC
Resumiendo podemos reconocer básicamente dos tipos de sistemas de
control.
Sistema de control natural o biológico. Por ejemplo: el mencionado
sistema de control de temperatura del cuerpo humano.
Sistema de control artificiales (creados por el hombre). Por ejemplo el
sistema de control de temperatura de una plancha eléctrica
automática, el piloto automático de un avión o una maquina
centrifuga.
1.2.3 Antecedentes de los SC
En el campo de la industria, los primero sistemas de control estuvieron
basados casi exclusivamente en componentes mecánicos y
electromecánicos (planchas, engranajes, relés, pequeños motores, etc.), y
se desarrollaron a finales de siglo XIX y principios de siglo XX, debido a los
progresos revolucionarios de la electrónica (los circuitos integrados, los
microprocesadores y las computadoras), los sistemas de control tuvieron un
desarrollo exponencial.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
12
Las primera etapas del moderno desarrollo de la teoría de control en
el campo ingeniera, son debidos a Minorsky, Nyquist y Hazen, entre muchos
otros. En 1922Minorsky trabajo en controles automáticos de dirección de
arcos. En 1932 Nyquist desarrollo un procedimiento para determinar la
estabilidad de los sistemas realimentados. Pero el gran interés por el tema
empezó a plantarse en 1934, coincidentemente con la publicación del
artículo “Theory of seervomecanism” (mecanismos siervos o esclavos).
1.2.4 Diagrama representativo de un SC
Cuando hablamos de sistemas de control nos referimos a un amplio
espectro que abarca, tanto los manuales como los automáticos, sencillos o
complicados.
Los sistemas de control son subsistemas de SISTEMAS más grandes y su
objetivo es regular (controlar) el funcionamiento de estos últimos.
En la figura 5 siguiente se esquematiza el diagrama de bloques de un
SISTEMA que cuenta con sistema de control. Podemos observar dos
bloques, uno representa el sistema de control, y el otro el sistema
controlado (Planta o Proceso). En el sistema de control se opera con
señales.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
13
Figura 5: Sistema de control
Hemos dicho que el control implica: mando, verificación, regulación. La
regulación, muchas veces presente en el control, aunque no siempre,
exige una señal de retorno (información) de la planta al sistema de control,
que informe sobre cómo se está desarrollando el proceso. Decimos que no
siempre hay regulación, porque no podemos hablar de regulación cuando
accionamos la llave para prender una lámpara de luz eléctrica, pero sí
cuando accionamos la llave de una cocina de gas.
1.2.5 Clasificación de los SC
Existe una Clasificación de los sistemas de control. Considerando las
características se pueden clasificaren dos tipos:
Sistemas de control de lazo (o bucle) abierto;
Sistemas de control de lazo (o bucle) cerrado (sistemas
realimentados).
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
14
En ambos casos el control puede ser manual o automático.
Sistemas de control de lazo abierto
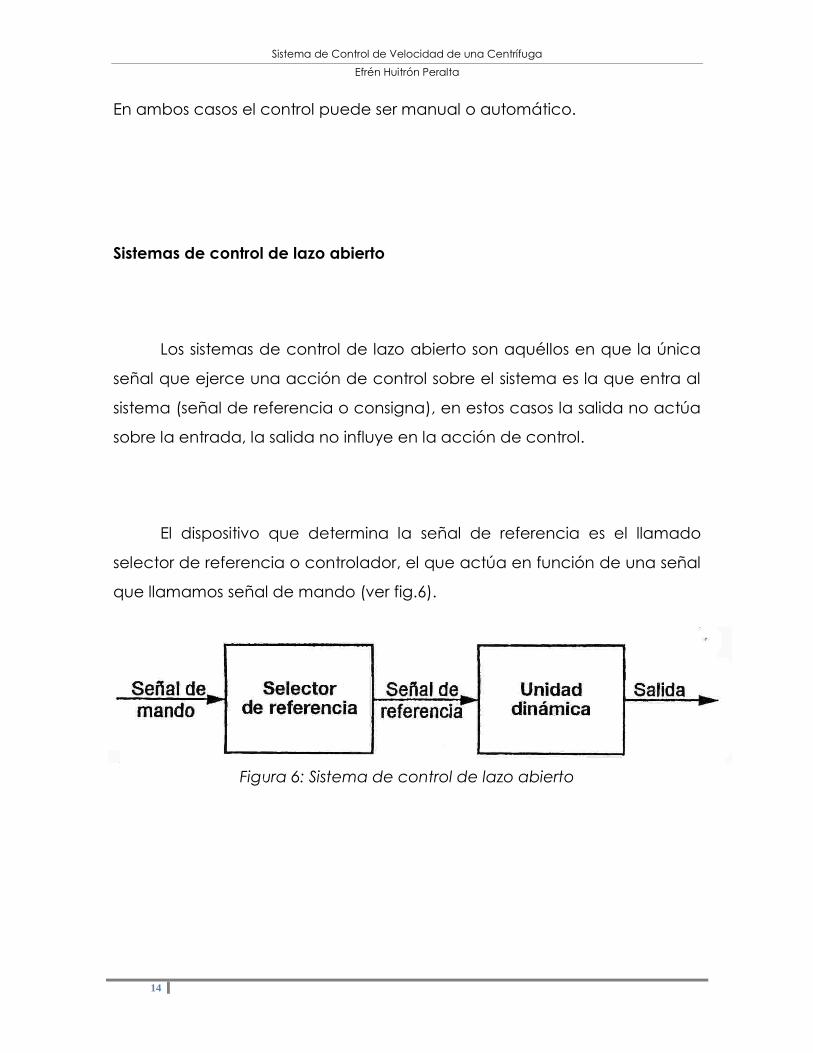
Los sistemas de control de lazo abierto son aquéllos en que la única
señal que ejerce una acción de control sobre el sistema es la que entra al
sistema (señal de referencia o consigna), en estos casos la salida no actúa
sobre la entrada, la salida no influye en la acción de control.
El dispositivo que determina la señal de referencia es el llamado
selector de referencia o controlador, el que actúa en función de una señal
que llamamos señal de mando (ver fig.6).
Figura 6: Sistema de control de lazo abierto

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
15
Sistemas de control de lazo cerrado
Los sistemas de control de lazo cerrado son aquéllos en los que la
acción de control depende tanto de la entrada de referencia como del
valor de la salida. En estos casos la salida del sistema actúa sobre la
entrada para mantener su valor dentro de los límites fijados. Cuando la
salida ejerce influencia sobre la entrada decimos que hay realimentación,
Los sistemas de control de lazo cerrado son sistemas realimentados.
Mediante la realimentación se corrigen las variaciones existentes entre el
valor real (detectado) de la salida y el valor deseado.
Realimentación
Se entiende por realimentación el hecho de re inyectar a la entrada
de un sistema una parte (o una función) de la salida, por medio de la señal
de realimentación. En un sistema se dice que hay realimentación (o
retroalimentación) cuando, a través de un circuito llamado lazo (o bucle)
de realimentación, la salida actúa sobre la entrada.
Existen dos tipos de realimentación: realimentación positiva y
realimentación negativa.
Hay realimentación positiva cuando un aumento de la señal de
realimentación provoca un aumento de la salida del sistema. La

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
16
realimentación positiva aumenta la divergencia y generalmente conduce
a la inestabilidad del sistema (bloqueo o destrucción).
Hay realimentación negativa cuando un aumento de la señal de
realimentación provoca una disminución de la salida del sistema. La
realimentación negativa favorece la convergencia hacia un fin, y
conduce a la estabilidad, en otras palabras tiende a mantener el equilibrio
de los sistemas, sean éstos artificiales (eléctricos, mecánicos, térmicos,
etc.), o naturales (homeostáticos, etc.)
El siguiente diagrama del libro de Joël de Rosnay, Macroscopio, ilustra con
bastante claridad el tema.
Figura 7: Realimentación Positiva (izquierda) Realimentación Negativa
(derecha)

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
17
1.2.6 Alcances de los SC
Las técnicas de control son en la actualidad parte importante en el
desarrollo de la automatización.
El interés de un sistema automatizado a llevado en estos a desarrollar
diversas maneras de control, en nuestro caso la idea es lograr una
adecuada forma de control de una maquina centrífuga de uso clínico,
este sistema se basa en el principio de la centrifugación, principio físico
que permite separar partículas en una solución, esta actividad tiene
diversas aplicaciones en los campos de la medicina, biología y en la
industria química.
1.3 Tarjeta digital: Arduino
Arduino es una herramienta para la fabricación de computadoras
que pueden detectar y controlar más el mundo físico de la computadora
de escritorio. Es una plataforma de código abierto de computación física
basada en un micro controlador simple, y un entorno de desarrollo para
escribir software para la tarjeta.
Arduino se puede utilizar para desarrollar objetos interactivos,
teniendo las entradas de una variedad de interruptores o sensores, y
controlar una variedad de luces, motores y otras salidas físicas. Los
proyectos Arduino pueden ser independientes, o se comunican con el
software que se ejecuta en el ordenador (por ejemplo, Flash,
Processing, MaxMSP.) Las juntas se pueden montar a mano o comprado

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
18
pre montado, el IDE de código abierto puede ser descargado de forma
gratuita.
El lenguaje de programación Arduino es una implementación de
cableado, una plataforma similar informático físico, que se basa en el
entorno de procesamiento de programación multimedia.
Hay muchos otras plataformas de micro controladores disponibles
para la computación física. Parallax Basic Stamp, Netmedia del BX-24,
Phidgets, Handyboard del MIT, y muchos otros ofrecen una funcionalidad
similar. Todos estos instrumentos tienen los detalles sucios de programación
de micro controladores y lo envolvemos en un formato fácil de usar.
Arduino también simplifica el proceso de trabajar con los micro
controladores, pero ofrece algunas ventajas para los profesores,
estudiantes y aficionados interesados sobre otros sistemas.
1.3.1 Ventajas
Barato - placas Arduino son relativamente baratas en comparación
con otras plataformas de micro controladores. La versión menos
costosa del módulo Arduino puede ser ensamblado a mano, e incluso
los módulos pre-ensamblados Arduino costar menos de $ 50.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
19
Multiplataforma - El software de Arduino se ejecuta en Windows,
Macintosh OSX y Linux. La mayoría de sistemas micro controladores
están limitados a Windows.
Simple, entorno de programación claro - El entorno de programación
Arduino es fácil de usar para los principiantes, pero lo bastante flexible
para los usuarios avanzados para aprovechar así. Para los maestros, es
conveniente basarse en el entorno de programación Processing, por
lo que los estudiantes que aprenden a programar en ese entorno
estarán familiarizados con la apariencia de Arduino.
El código abierto y extensible de software - El software de Arduino está
publicado como herramientas de código abierto, disponible para su
extensión por programadores experimentados. El idioma puede ser
ampliada a través de librerías C + +, y las personas que desean
comprender los detalles técnicos pueden dar el salto de Arduino para
el lenguaje de programación C de AVR en la que se basa. Del mismo
modo, puede agregar AVR-C código directamente en sus programas
de Arduino si se desea.
El código abierto y hardware extensible - El Arduino se basa en
AtmelATmega8 y ATMEGA168 micro controladores. Los planes de los
módulos se publica bajo una licencia Creative Commons, así que los
diseñadores de circuitos con experiencia pueden hacer su propia
versión del módulo, ampliándolo y mejorándolo. Incluso usuarios

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
20
relativamente inexpertos pueden construir la versión breadboard del
módulo con el fin de entender cómo funciona y ahorrar dinero.
1.4 Antecedentes
Como ejemplo se tiene la centrífuga con control digital con la que se
trabaja actualmente, es del tipo clínica o de mesa, para una sencilla
explicación de sus características y control se desarrollaran los siguientes
puntos.
El panel de control está ubicado en la parte frontal de la centrifuga,
esta máquina tiene un sistema de doble encendido (uno de ellos ubicado
en la parte posterior), posee pulsadores para el ingreso de la velocidad en
RPM y el tiempo en minutos y horas todos estos datos ingresados mediante
el pulsador de carga, asimismo se tienen visualizadores para la velocidad y
el tiempo que se actualizan después de su carga, la Fig. 8 muestra la
tarjeta y la máscara final.
Figura 8: Panel frontal.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
21
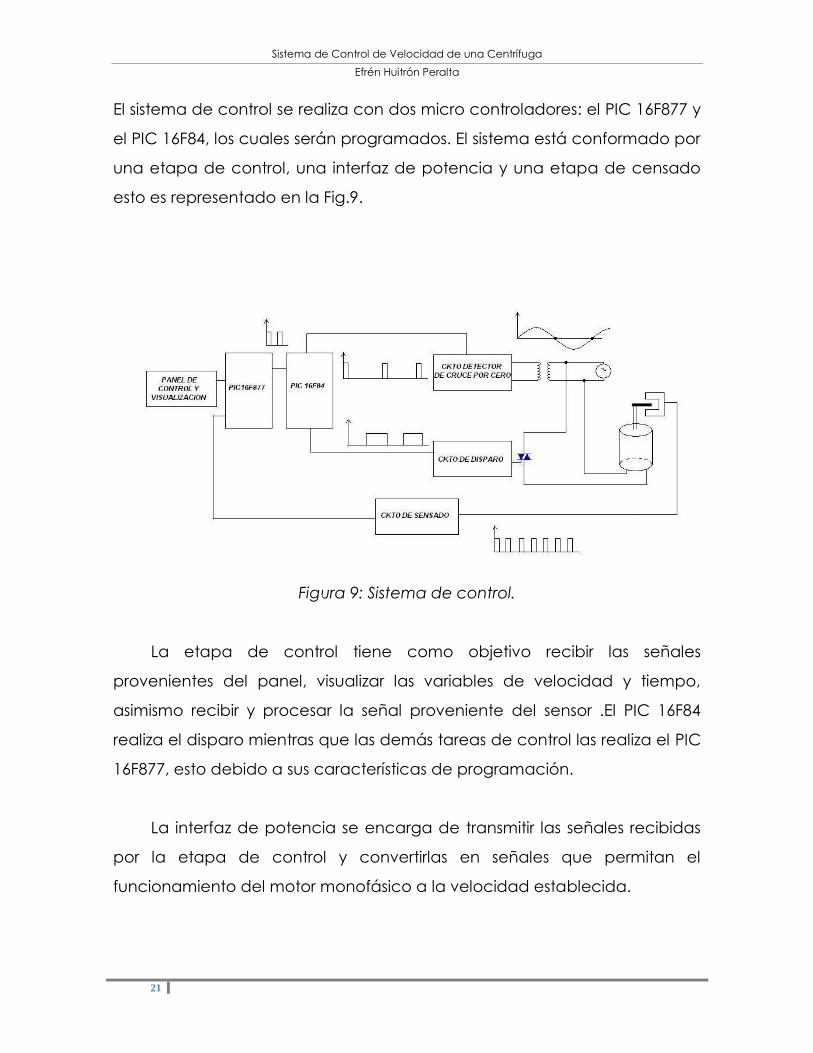
El sistema de control se realiza con dos micro controladores: el PIC 16F877 y
el PIC 16F84, los cuales serán programados. El sistema está conformado por
una etapa de control, una interfaz de potencia y una etapa de censado
esto es representado en la Fig.9.
Figura 9: Sistema de control.
La etapa de control tiene como objetivo recibir las señales
provenientes del panel, visualizar las variables de velocidad y tiempo,
asimismo recibir y procesar la señal proveniente del sensor .El PIC 16F84
realiza el disparo mientras que las demás tareas de control las realiza el PIC
16F877, esto debido a sus características de programación.
La interfaz de potencia se encarga de transmitir las señales recibidas
por la etapa de control y convertirlas en señales que permitan el
funcionamiento del motor monofásico a la velocidad establecida.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
22
La etapa de censado lo realiza un sensor óptico el cual permite tener
lectura por revolución, esta señal es amplificada y enviada a la etapa de
control para la supervisión de la velocidad.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
23
CAPITULO 2:
Parte Experimental
Se construyo un prototipo de un sistema de control de velocidad par un
motor de corriente alterna el cual se ejecuto en dos partes la parte
analógica y la parte digitas el cual efectúa la función igual que una
maquina centrifuga de laboratorio clínico de baja velocidad.
2.1 Material utilizado
Para la construcción del sistema de control de velocidad se necesito el
siguiente material.
Resistencias
Capacitores
LM358N
MAC1206
MOC3011
TARJETA ARDUINO
MOTOR CA

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
24
COMPUTADORA
MULTIMETRO
TACOMETRO
OSCILOSCOPIO
CAMARA FOTOGRAFICA
2.2 Parte Analógica
Primero diseñamos unos detectores de cruce por cero que se utilizan
para detectar los tipos de señales, o diferentes significados de señales.
Algo muy simple sería considerar una señal que 'en su parte positiva'
indicará un 'uno lógico' y en su parte negativa un 'cero lógico'. El detector
de cruce por cero es parte del circuito de detección 'por nivel' para
determinar si se ha recibido un 'uno' o un 'cero'.
Con señales analógicas los detectores de cruce por cero operan con
formas de ondas mucho mas variantes que las del caso digital, se pueden
utilizar para determinar el tipo de la forma de onda, el nivel promedio de la
señal, ayudar a integrar o diferenciar señales, etc.
Toda aquella 'función matemática' a aplicar a la señal que requiera
determinar el 'nivel de cero' de tal señal.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
25
Figura 10: Cruze por ceros
2.3 Parte de Potencia
Despues tuvimos que poner un optacoplador para proteger de el sistema
analogico a el sistema digital, en cual abarcamos la parte de potencia
con un arreglo de resistencias y capacitores y un TRIAC, que fue el
MAC12DG y en la salida se tiene el motor universal.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
26
Figura 11: Etapa de potencia
Figura 12: Etapa de potencia ya ensamblada
Los modos básicos de operación de los opto acopladores son: por
pulsos y lineal, en pulsos el LED sé switchea on-off ). En el modo lineal, la
entrada es polarizada por una fuente de directa, y la entrada se monta a
esta señal.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
27
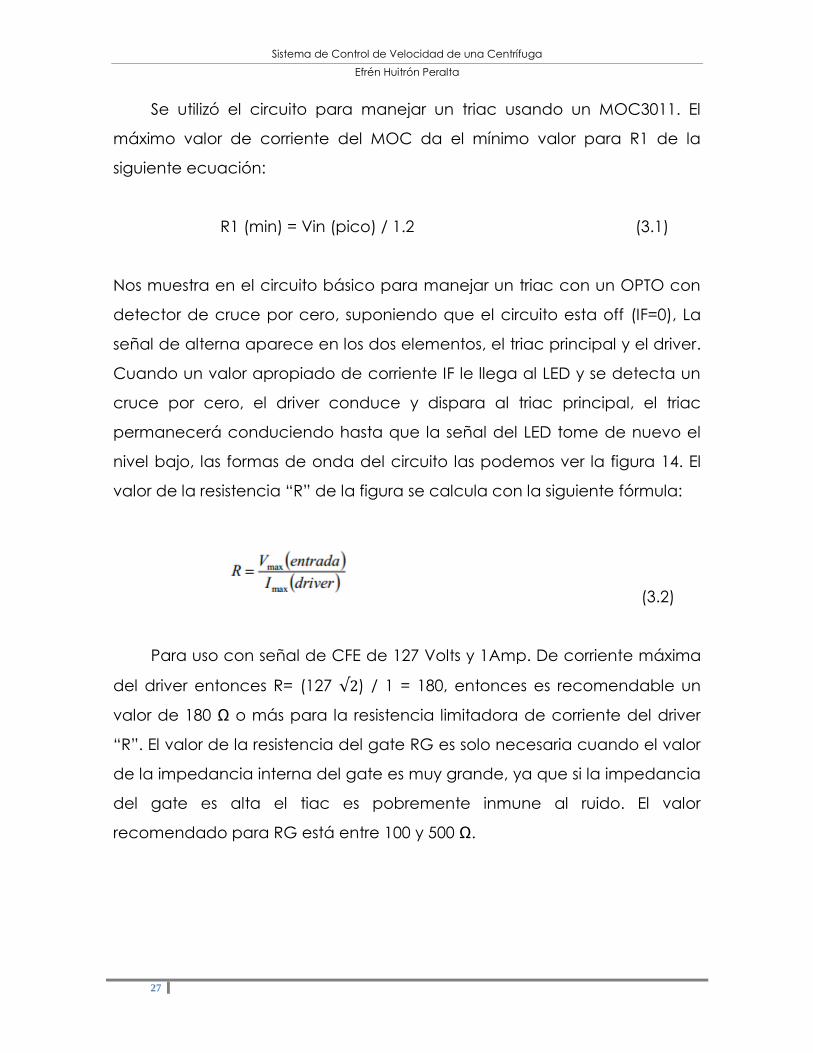
Se utilizó el circuito para manejar un triac usando un MOC3011. El
máximo valor de corriente del MOC da el mínimo valor para R1 de la
siguiente ecuación:
R1 (min) = Vin (pico) / 1.2 (3.1)
Nos muestra en el circuito básico para manejar un triac con un OPTO con
detector de cruce por cero, suponiendo que el circuito esta off (IF=0), La
señal de alterna aparece en los dos elementos, el triac principal y el driver.
Cuando un valor apropiado de corriente IF le llega al LED y se detecta un
cruce por cero, el driver conduce y dispara al triac principal, el triac
permanecerá conduciendo hasta que la señal del LED tome de nuevo el
nivel bajo, las formas de onda del circuito las podemos ver la figura 14. El
valor de la resistencia “R” de la figura se calcula con la siguiente fórmula:
(3.2)
Para uso con señal de CFE de 127 Volts y 1Amp. De corriente máxima
del driver entonces R= (127 √2) / 1 = 180, entonces es recomendable un
valor de 180 Ω o más para la resistencia limitadora de corriente del driver
“R”. El valor de la resistencia del gate RG es solo necesaria cuando el valor
de la impedancia interna del gate es muy grande, ya que si la impedancia
del gate es alta el tiac es pobremente inmune al ruido. El valor
recomendado para RG está entre 100 y 500 Ω.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
28
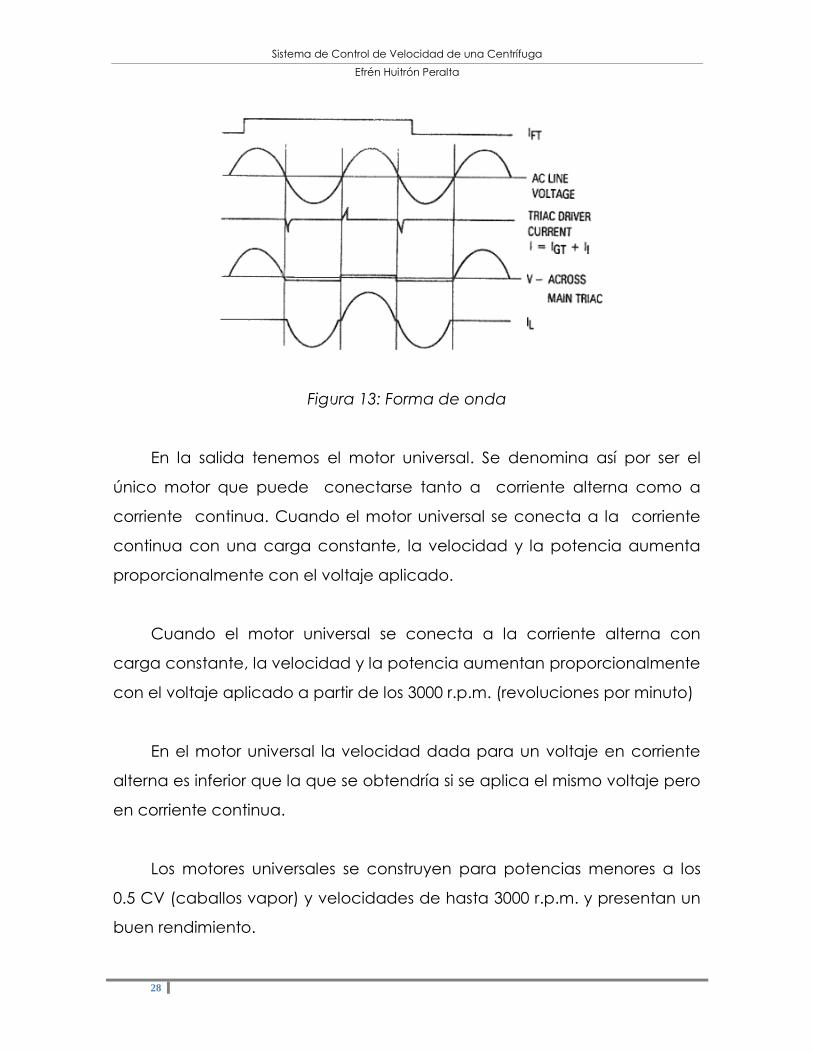
Figura 13: Forma de onda
En la salida tenemos el motor universal. Se denomina así por ser el
único motor que puede conectarse tanto a corriente alterna como a
corriente continua. Cuando el motor universal se conecta a la corriente
continua con una carga constante, la velocidad y la potencia aumenta
proporcionalmente con el voltaje aplicado.
Cuando el motor universal se conecta a la corriente alterna con
carga constante, la velocidad y la potencia aumentan proporcionalmente
con el voltaje aplicado a partir de los 3000 r.p.m. (revoluciones por minuto)
En el motor universal la velocidad dada para un voltaje en corriente
alterna es inferior que la que se obtendría si se aplica el mismo voltaje pero
en corriente continua.
Los motores universales se construyen para potencias menores a los
0.5 CV (caballos vapor) y velocidades de hasta 3000 r.p.m. y presentan un
buen rendimiento.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
29
El principio de funcionamiento del motor universal está determinado
por el efecto motor que produce un conductor recorrido por una corriente
eléctrica y que está sometido a un campo magnético. Por acción
magneto motriz existirá un desplazamiento y por ende una rotación.
Características de un Motor Universal
Funciona con corriente alterna y con corriente directa.
Posee un par de arranque muy elevado.
La velocidad es directamente proporcional a la corriente.
Se utiliza en herramientas manuales, electrodomésticos y en
medicina.
Para invertir el sentido de rotación, se invierte el sentido de la
corriente en cualquiera de los bobinados.
Constitución de un Motor Universal
Bobina conductoras: se les conoce con el nombre de inductor o
campos inductores.
Bobina inducido: Es el rotor bobinado y se le conoce con el nombre
de inducido o armadura.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
30
Escobillas: Son fabricadas de carbón por ser un material suave y un
coeficiente de temperatura .
Resortes: Sirve para mantener las escobillas en su lugar por medio de
presión mecánica.
Tapas o escudos: Sirve para sostener el eje del motor y dar estructura
mecánica al motor.
Figura 14: Motor
Figura 15: Ensamble del motor

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
31
2.4 Parte Digital
Se utilizo una tarjeta digital (Arduino) en el cual se programo el control
y por medio de una interfaz de Visual Basic pudimos crear comunicación y
un software el cual es muy fácil de utilizar ya que viene empaquetado y
solo es cuestión de apretar los tipos de revoluciones por minuto que
queremos.
Figura 16. Software utilizado.
2.4.1 Código Fuente
Dim puerto As Integer
Private Sub ENVIAR_Click()
MSComm1.Output = Trim(text1.Text)
End Sub

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
32
Private Sub Combo1_Click()
puerto = Combo1.ListIndex + 1
conectar
End Sub
Private Sub Command1_MouseDown(Index As Integer, Button As Integer,
Shift As Integer, X As Single, Y As Single)
Select Case (Index)
Case 0:
ProgressBar1.Value = 0
escribir_matriz
MSComm1.Output = "0"
Case 1:
ProgressBar1.Value = 1
escribir_matriz
MSComm1.Output = "1"
Case 2:
ProgressBar1.Value = 2
escribir_matriz
MSComm1.Output = "2"
Case 3:
ProgressBar1.Value = 3
escribir_matriz
MSComm1.Output = "3"

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
33
Case 4:
ProgressBar1.Value = 4
escribir_matriz
MSComm1.Output = "4"
Case 5:
ProgressBar1.Value = 5
escribir_matriz
MSComm1.Output = "5"
Case 6:
ProgressBar1.Value = 6
escribir_matriz
MSComm1.Output = "6"
Case 7:
ProgressBar1.Value = 7
escribir_matriz
MSComm1.Output = "7"
Case 8:
ProgressBar1.Value = 8
escribir_matriz
MSComm1.Output = "8"
Case 9:
ProgressBar1.Value = 9
escribir_matriz
MSComm1.Output = "9"
Case 10:
ProgressBar1.Value = 10
escribir_matriz
MSComm1.Output = "M"
End Select

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
34
End Sub
Dim puerto As Integer
Private Sub ENVIAR_Click()
MSComm1.Output = Trim(text1.Text)
End Sub
Option Explicit
Option Base 1
Dim velocidad As String
Dim data_input As String
Dim puerto As Integer
Dim dato As String
Private Sub Combo1_Click()
'puerto = Combo1.ListIndex + 1
Switch1.Status = [On ]
conectar
End Sub
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
35
Private Sub Command1_MouseDown(Index As Integer, Button As Integer,
Shift As Integer, X As Single, Y As Single)
Select Case (Index)
Case 0:
ProgressBar1.Value = 0
escribir_matriz
MSComm1.Output = "0000"
Case 1:
ProgressBar1.Value = 1
escribir_matriz
Case 2:
ProgressBar1.Value = 2
escribir_matriz
Case 3:
ProgressBar1.Value = 3
escribir_matriz
Case 4:
ProgressBar1.Value = 4
escribir_matriz
Case 5:
ProgressBar1.Value = 5
escribir_matriz
MSComm1.Output = "0511"
Case 6:
ProgressBar1.Value = 6
escribir_matriz
Case 7:
ProgressBar1.Value = 7
escribir_matriz
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
36
Case 8:
ProgressBar1.Value = 8
escribir_matriz
Case 9:
ProgressBar1.Value = 9
escribir_matriz
Case 10:
ProgressBar1.Value = 10
escribir_matriz
MSComm1.Output = "1023"
End Select
End Sub
Private Sub Form_Load()
Skin1.LoadSkin (App.Path & "\skins\1.Droid.skn")
Skin1.ApplySkin Me.hWnd
End Sub
Private Sub Form_Unload(Cancel As Integer)
If (MSComm1.PortOpen = True) Then
desconectar
End If
End Sub

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
37
Private Sub Switch1_Click()
If (Switch1.Status = Off) Then
desconectar
Else
conectar
End If
End Sub
Private Sub conectar()
On Error GoTo verificar
MSComm1.CommPort = puerto
MSComm1.PortOpen = True
MsgBox "La conexión se ha establecido", vbOKOnly, "Conexión Exitosa"
'Frame2.Visible = False
'Frame3.Visible = True
Switch1.Visible = True
MSComm1.Output = "0000"
DisplayMatrix1.Visible = True
DisplayMatrix1.LEDColorOn = vbGreen
DisplayMatrix1.PutText 0, 1, "VELOCIDAD"
DisplayMatrix1.PutText 1, 2, "AJUSTAR"

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
38
verificar:
If (Err.Number > 0) Then
MsgBox "Verifique el puerto seleccionado o que se encuentre conectado",
vbExclamation + vbOKOnly, "Error de Comunicación"
End If
End Sub
Private Sub desconectar()
MSComm1.Output = "0000"
DisplayMatrix1.Visible = False
DisplayMatrix1.Clear
MSComm1.PortOpen = False
Switch1.Visible = False
'Frame2.Visible = True
'Frame3.Visible = False
End Sub
Private Sub escribir_matriz()
DisplayMatrix1.Clear
Select Case (ProgressBar1.Value)
Case 0 To 3:
DisplayMatrix1.LEDColorOn = vbGreen
DisplayMatrix1.PutText 0, 1, "VELOCIDAD"
DisplayMatrix1.PutText 1, 3, Str(ProgressBar1.Value * 10) + " " + "%"
Case 4 To 7:
DisplayMatrix1.LEDColorOn = vbYellow
DisplayMatrix1.PutText 0, 1, "VELOCIDAD"

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
39
DisplayMatrix1.PutText 1, 3, Str(ProgressBar1.Value * 10) + " " + "%"
Case 8 To 10:
DisplayMatrix1.LEDColorOn = vbRed
DisplayMatrix1.PutText 0, 1, "VELOCIDAD"
DisplayMatrix1.PutText 1, 3, Str(ProgressBar1.Value * 10) + " " + "%"
Case Else
End Select
End Sub
Private Sub Combo1_Click()
puerto = Combo1.ListIndex + 1
conectar
End Sub
Private Sub Command1_MouseDown(Index As Integer, Button As Integer,
Shift As Integer, X As Single, Y As Single)
Select Case (Index)
Case 0:
ProgressBar1.Value = 0
escribir_matriz
MSComm1.Output = "0"
Case 1:
ProgressBar1.Value = 1
escribir_matriz
MSComm1.Output = "1"

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
40
Case 2:
ProgressBar1.Value = 2
escribir_matriz
MSComm1.Output = "2"
Case 3:
ProgressBar1.Value = 3
escribir_matriz
MSComm1.Output = "3"
Case 4:
ProgressBar1.Value = 4
escribir_matriz
MSComm1.Output = "4"
Case 5:
ProgressBar1.Value = 5
escribir_matriz
MSComm1.Output = "5"
Case 6:
ProgressBar1.Value = 6
escribir_matriz
MSComm1.Output = "6"
Case 7:
ProgressBar1.Value = 7
escribir_matriz
MSComm1.Output = "7"
Case 8:
ProgressBar1.Value = 8
escribir_matriz
MSComm1.Output = "8"
Case 9:

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
41
ProgressBar1.Value = 9
escribir_matriz
MSComm1.Output = "9"
Case 10:
ProgressBar1.Value = 10
escribir_matriz
MSComm1.Output = "M"
End Select
End Sub
2.4.2 Comando PWM
Dentro del proyecto utilizamos una herramienta que nos ofrece arduino
que es el PWM
La Modulación por Ancho de Pulso (PWM = Pulse Width Modulation) es una
técnica para simular una salida analógica con una salida digital. El control
digital se usa para crear una onda cuadrada, una señal que conmuta
constantemente entre encendido y apagado. Este patrón de encendido-
apagado puede simular voltajes entre 0 (siempre apagado) y 5 voltios
(siempre encendido) simplemente variando la proporción de tiempo entre
encendido y apagado. A la duración del tiempo de encendido (ON) se le
llama Ancho de Pulso (pulse width). Para variar el valor analógico
cambiamos, o modulamos, ese ancho de pulso.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
42
Con la Arduino la frecuencia PWM es bastante próxima a 500Hz lo que
equivale a periodos de 2 milisegundos cada uno Por el cual programe el
pulso de 0 a 8.3 ms.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
43
CAPITULO 3:
Resultados y conclusiones
3.1 Análisis de Resultados
Del montaje del prototipo, se tomaron lecturas a diferentes revoluciones
por minuto, desde 0 hasta el máximo nivel de 4000 RPM. Los resultados se
muestran, primero los principales parámetros en las tablas, y las figuras
muestran el comportamiento gráfico visto a través del osciloscopio,
además de la simulación.
Tabla 3.1 Principales parámetros al 100%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
100% 4000 1.4 32.1
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
44
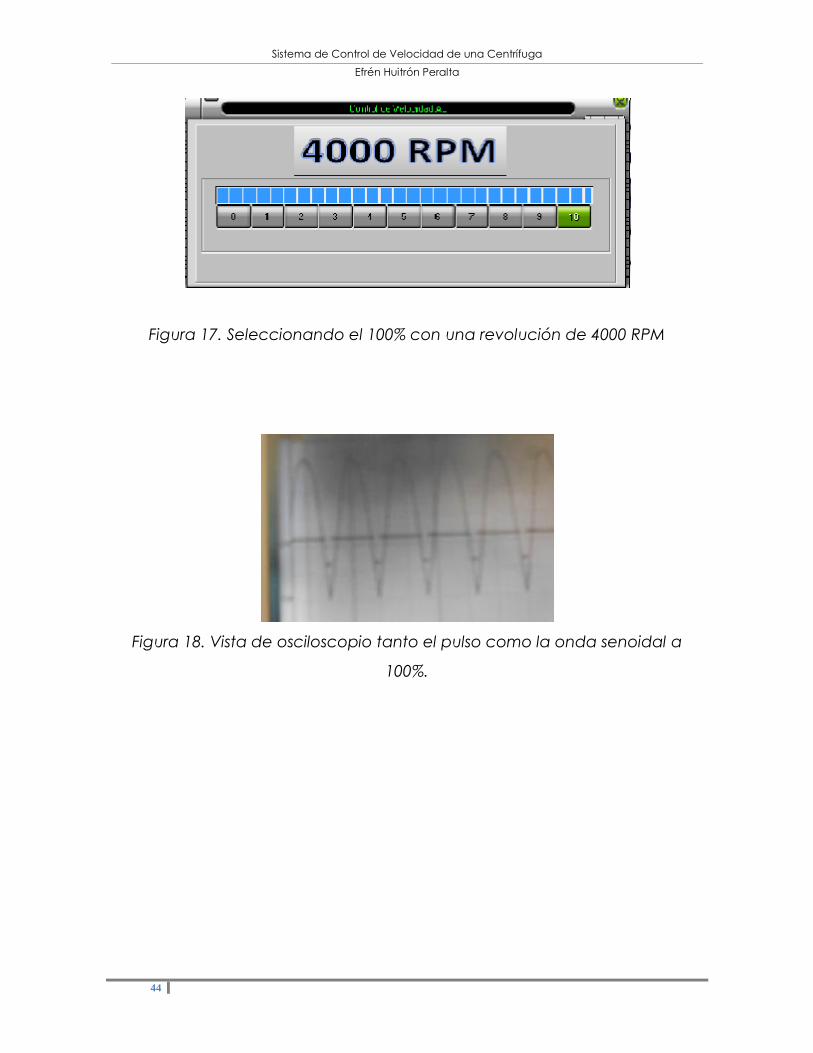
Figura 17. Seleccionando el 100% con una revolución de 4000 RPM
Figura 18. Vista de osciloscopio tanto el pulso como la onda senoidal a
100%.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
45
Tabla 3.2 Principales parámetros al 90%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
90% 3600 1.5 30
Figura 19. Seleccionando el 90% con una revolución de 3600 RPM
Figura 20. Vista de osciloscopio tanto el pulso como la onda senoidal a
90%.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
46
Tabla 3.3 Principales parámetros al 80%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
80% 3200 1.5 30
Figura 21. Seleccionando el 80% con una revolución de 3200 RPM
Figura 22. Vista de osciloscopio tanto el pulso como la onda senoidal a
80%.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
47
Tabla 3.4 Principales parámetros al 70%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
70% 2800 1.7 26.44
Figura 23. Seleccionando el 70% con una revolución de 2800 RPM
Figura 24. Vista de osciloscopio tanto el pulso como la onda senoidal a
70%.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
48
Tabla 3.5 Principales parámetros al 60%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
60% 2400 2.7 16.0
Figura 25. Seleccionando el 60% con una revolución de 2400 RPM
Figura 26. Vista de osciloscopio tanto el pulso como la onda senoidal a
60%.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
49
Tabla 3.6 Principales parámetros al 50%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
50% 2000 22.2 2.02
Figura 27. Seleccionando el 50% con una revolución de 2000 RPM
Figura 28. Vista de osciloscopio tanto el pulso como la onda senoidal a
50%.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
50
Tabla 3.7 Principales parámetros al 40%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
40% 1600 44 1.02
Figura 29. Seleccionando el 40% con una revolución de 1600 RPM
Figura 30. Vista de osciloscopio tanto el pulso como la onda senoidal a
40%.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
51
Tabla 3.8 Principales parámetros al 30%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
30% 1200 68.4 0.658
Figura 31. Seleccionando el 30% con una revolución de 1200 RPM
Figura 32. Vista de osciloscopio tanto el pulso como la onda senoidal a
30%.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
52
Tabla 3.9 Principales parámetros al 20%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
20% 800 91 0.495
Figura 33. Seleccionando el 20% con una revolución de 800 RPM
Figura 34. Vista de osciloscopio tanto el pulso como la onda senoidal a
20%.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
53
Tabla 3.10 Principales parámetros al 10%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
10% 400 109.4 0.411
Figura 35. Seleccionando el 10% con una revolución de 400 RPM
Figura 36. Vista de osciloscopio tanto el pulso como la onda senoidal a
10%.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
54
Tabla 3.11 Principales parámetros al 0%
Porcentaje RPM VOLTAJE (V) CORRIENTE (A)
0% 0 124 0.365
Figura 37. Seleccionando el 0% con una revolución de 0 RPM
Figura 38. Vista de osciloscopio tanto el pulso como la onda senoidal a 0%.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
55
3.2 Conclusiones
En la primera etapa del proyecto, que fue la de investigación teórica,
se enfrentó el problema de la existencia de mucha fuentes de información
pero no tan especificas, ya que ninguna presentaba un sistema de control
de velocidad. Por lo cual se tuvo que integrar la parte Física, Bioquímica,
Electrónica y Programación, para saber cómo proceder durante la
elaboración de este proyecto.
La segunda etapa fue la construcción del prototipo. Inicialmente se
dificulto el planteamiento del diseño, se necesito aprender muchos
conceptos de programación, electrónica de potencia y motores para
distintos fines de construcción. Se construyo un modelo inicial, pero ya que
no funcionaba correctamente para este proyecto, se necesitaron corregir
muchas imperfecciones en cuanto la rigidez y estabilidad. Esto sirvió para
tener más creatividad, ingenio y conocimiento de elementos para la
corrección del prototipo. Al finalizar esta etapa se tenían suficientes
argumentos sobre Mecánica, Electrónica de potencia, Programación,
Bioquímica y Motores.
En la tercera etapa que fue la elaboración de los circuitos, se
profundizó en la electrónica, perfeccionando conocimientos. Se cuido y
mejoró la técnica para soldar. Y finalmente se aprendió sobre la
protección que se debe dar a los circuitos de potencia y sobre todo a
programar en un lenguaje.

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
56
En la cuarta parte, donde se realizo la programación, se estudio la
comunicación de arduino con el sistema. El control fue algo difícil ya que el
problema fue dar entender al usuario una manera fácil para controlar el
motor mediante un software, y no tenga que entrar directamente al
software de arduino. Para esto se tuvo que aprender otro lenguaje de
programación, Visual Basic. Esto permitió una mejor comunicación, entre
arduino y la PC, así el programa fue más fácil de empaquetar y para el
usuario representa una manera más fácil de controlar el motor.
Durante la elaboración de este proyecto terminal, fue importante
documentar todo lo que se hacía, lo que resulto ser de gran ayuda, ya que
día con día se presentaban los resultados sin olvidar los detalles
importantes.
Como conclusión podemos decir que el hecho de controlar algo
automáticamente es muy útil, más preciso y más confiable. Sobre todo
cuando esto tiene un impacto en el Sector Salud. Para poder medir
parámetros que sirven como herramienta para que los especialistas y
médicos puedan tomar las mejores decisiones, dando un diagnostico
seguro y confiable

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
57
Índice de Tablas
Tabla 3.1 Principales parámetros al 100%
Tabla 3.2 Principales parámetros al 90%
Tabla 3.3 Principales parámetros al 80%
Tabla 3.4 Principales parámetros al 70%
Tabla 3.5 Principales parámetros al 60%
Tabla 3.6 Principales parámetros al 50%
Tabla 3.7 Principales parámetros al 40%
Tabla 3.8 Principales parámetros al 30%
Tabla 3.9 Principales parámetros al 20%
Tabla 3.10 Principales parámetros al 10%
Tabla 3.11 Principales parámetros al 0%

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
58
Índice de Figuras
Figura 1: concepto de fuerza centrifuga
Figura: 2. Tipos de fuerza
Figura 3: Representación de la fuerza centrifuga en el rotor
Figura 4: Equipo y sus principales partes.
Figura 5: Sistema de control
Figura 6: Sistema de control de lazo abierto
Figura 7: Realimentación Positiva (izquierda) Realimentación negativa
(derecha)
Figura 8: Panel frontal.
Figura 9: Sistema de control.
Figura 10: Cruze por ceros
Figura 11: Etapa de potencia
Figura 12: Etapa de potencia ya ensamblada
Figura 13: Forma de onda
Figura 14: Motor
Figura 15: Ensamble del motor
Figura 16. Software utilizado.
Figura 17 Seleccionando el 100% con una revolución de 4000 RPM
Figura 18. Vista de osciloscopio tanto el pulso como la onda senoidal
a100%.
Figura 19. Seleccionando el 90% con una revolución de 3600 RPM
Figura 20. Vista de osciloscopio tanto el pulso como la onda senoidal a
90%.
Figura 21. Seleccionando el 80% con una revolución de 3200 RPM

Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
59
Figura 22. Vista de osciloscopio tanto el pulso como la onda senoidal a
80%.
Figura 23. Seleccionando el 70% con una revolución de 2800 RPM
Figura 24. Vista de osciloscopio tanto el pulso como la onda senoidal a
70%.
Figura 25. Seleccionando el 60% con una revolución de 2400 RPM
Figura 26. Vista de osciloscopio tanto el pulso como la onda senoidal a
60%.
Figura 27. Seleccionando el 50% con una revolución de 2000 RPM
Figura 28. Vista de osciloscopio tanto el pulso como la onda senoidal a
50%.
Figura 29. Seleccionando el 40% con una revolución de 1600 RPM
Figura 30. Vista de osciloscopio tanto el pulso como la onda senoidal a
40%.
Figura 31. Seleccionando el 30% con una revolución de 1200 RPM
Figura 32. Vista de osciloscopio tanto el pulso como la onda senoidal a
30%.
Figura 33. Seleccionando el 20% con una revolución de 800 RPM
Figura 34. Vista de osciloscopio tanto el pulso como la onda senoidal a
20%.
Figura 35. Seleccionando el 10% con una revolución de 400 RPM
Figura 36. Vista de osciloscopio tanto el pulso como la onda senoidal
10%.
Figura 37, Seleccionando el 0% con una revolución de 0 RPM
Figura 38. Vista de osciloscopio tanto el pulso como la onda senoidal
0%.
Sistema de Control de Velocidad de una Centrífuga
Efrén Huitrón Peralta
60
Referencias
[1] J.Iovine, Pic microcontroller proyect book , EEUU: Editorial Mc Graw
Hill, 1999.
[2] Hellebuyck,Chuck Programming Pic with microcontrollers with
Picbasic , Editorial Newness, 2003.
[3] P.David,M. Norris, Design and Development of Medical Electronic
Instrumentation , Editorial Wiley, 2005.
[4] T.Maloney, Electronica Industrial Moderna ,3ª edicion, Prentice Hall.
[5] A. Granados Lee, Proyectos Electrónicos con Micro controladores
PIC, Inictel, 2004.
[6] Data Sheet 16F877 and 16F84 the Microchip, Práctico de
aplicaciones PIC16F87X. McGraw-Hill.
[7] Interamericana de España. Segunda parte. Pág. 87-110.
[8] Microchip Datasheet PIC16F87X. Microchip Technology inc., 2001,
pág 1-30.
[9] Quintanilla, M.A. Tecnología un enfoque filosófico. EUDEBA, Buenos
Aires, 1991.
[10] Van Gigch, J.P. Teoría general de sistemas. Ed.Trillas, México,
1995.
[11] B Alcells, J.; Romeral, J.R. Autómatas programabas. Ed.
Marcombo, Barcelona, 1997.
[12] Bolton, W. Instrumentación y control industrial. Ed. Marcombo,
Barcelona, 1996.
[13] D'azzo, J.; Houpis, C. Sistemas lineales de control. Ed. Paraninfo,
Madrid, 1977.
[14] De Rosnay, i. El macroscopio. Ed. AC, Madrid, 1984.