serie: recursos didácticos - dirección general de ... didacticos/17... · 2 probador de...
TRANSCRIPT

Serie: Recursos didácticos
Tapa:Imagen combinada de la Supernova Remnamt captadapor el telescopio Hubble - NASA.


a u t o r i d a d e s
PRESIDENTE DE LA NACIÓN
Dr. Néstor Kirchner
MINISTRO DE EDUCACIÓN, CIENCIA Y TECNOLOGÍA
Lic. Daniel Filmus
SECRETARIO DE EDUCACIÓN, CIENCIA Y TECNOLOGÍA
Prof. Alberto E. Sileoni
DIRECTORA EJECUTIVA DEL INSTITUTO NACIONAL DE
EDUCACIÓN TECNOLÓGICA
Lic. María Rosa Almandoz
DIRECTOR NACIONAL DEL CENTRO NACIONAL DE
EDUCACIÓN TECNOLÓGICA
Lic. Juan Manuel Kirschenbaum

Cargador semiautomáticopara máquinas a CNCde accionamiento electroneumático
Mariano Fóppoli
Fóppoli, MarianoCargador semiautomático para máquinas a GNC de accionamiento elec-troneumático / Mariano Fóppoli; coordinado por Juan Manuel Kirschenbaum.- 1a ed. - Buenos Aires: Ministerio de Educación, Ciencia y Tecnología de laNación. Instituto Nacional de Educación Tecnológica, 2005.104 p.; 22x17 cm. (Recursos Didácticos; 17)
ISBN 950-00-0525-5
1. Electroneumática. 2. Semiautomatismo. 3. GNC.I. Kirschenbaum, Juan Manuel, coord. II. Título
CDD 621.51
Fecha de catalogación: 3/11/2005
Impreso en Gráfica Pinter S. A., México 1352 (C1097ABB), Buenos Aires,en noviembre 2005
Tirada de esta edición: 3.000 ejemplares
Colección Serie “Recursos didácticos”.Coordinadora general: Haydeé Noceti.
Distribución de carácter gratuito.
Queda hecho el depósito que previene la ley n° 11.723. © Todos los derechosreservados por el Ministerio de Educación, Ciencia y Técnologia - InstitutoNacional de Educación Tecnológica.
La reproducción total o parcial, en forma idéntica o modificada por cualquiermedio mecánico o electrónico incluyendo fotocopia, grabación o cualquier sis-tema de almacenamiento y recuperación de información no autorizada en formaexpresa por el editor, viola derechos reservados.
Industria Argentina.
ISBN 950-00-0525-5
Instituto Nacional de Educación TecnológicaCentro Nacional de Educación TecnológicaCeNET-Materiales
Serie: “Recursos didácticos”
1 Invernadero automatizado
2 Probador de inyectores y motores paso a paso
3 Quemador de biomasa
4 Intercomunicador por fibra óptica
5 Transmisor de datos bidireccional por fibre óptica, entre computadoras
6 Planta potabilizadora
7 Medidor de distancia y de velocidad por ultrasonido
8 Estufa de laboratorio
9 Equipamiento EMA -Características físicas de los materiales de construcción-
10 Dispositivo para evaluar parámetros de líneas
11 Biodigestor
12 Entrenador en lógica programada
13 Entorno de desarrollo para programación de microcontroladores PIC
14 Relevador de las características de componenetes semiconductores
15 Instalación sanitaria de una vivienda
16 Equipamiento para el análisis de estructuras de edificios
17 Cargador semiautomático para máquinas a CNC de accionamiento electroneumático
18 Biorreactor para la producción de alimentos
19 Ascensor
20 Pila de combustible
Ministerio de Educación, Ciencia y Tecnología.Instituto Nacional de Educación Tecnológica.Saavedra 789. C1229ACE.Ciudad Autónoma de Buenos Aires.República Argentina.
El Instituto Nacional de EducaciónTecnológica -INET- enmarca sus líneas deacción, programas y proyectos, en las metasde:
• Coordinar y promover programasnacionales y federales orientados a for-talecer la educación técnico-profesional,articulados con los distintos niveles y ci-clos del sistema educativo nacional.
• Implementar estrategias y acciones decooperación entre distintas entidades,instituciones y organismos –gubernamen-tales y no gubernamentales-, que permi-tan el consenso en torno a las políticas,los lineamientos y el desarrollo de lasofertas educativas, cuyos resultados seanconsiderados en el Consejo Nacional deEducación-Trabajo –CoNE-T– y en elConsejo Federal de Cultura y Educación.
• Desarrollar estrategias y acciones desti-nadas a vincular y a articular las áreas deeducación técnico-profesional con lossectores del trabajo y la producción, aescala local, regional e interregional.
• Diseñar y ejecutar un plan de asistenciatécnica a las jurisdicciones en los aspectosinstitucionales, pedagógicos, organizativosy de gestión, relativos a la educación téc-
nico-profesional, en el marco de los acuer-dos y resoluciones establecidos por elConsejo Federal de Cultura y Educación.
• Diseñar y desarrollar un plan anual decapacitación, con modalidades presen-ciales, semipresenciales y a distancia, consede en el Centro Nacional de EducaciónTecnológica, y con nodos en los CentrosRegionales de Educación Tecnológica ylas Unidades de Cultura Tecnológica.
• Coordinar y promover programas deasistencia económica e incentivos fis-cales destinados a la actualización y eldesarrollo de la educación técnico-profe-sional; en particular, ejecutar lasacciones relativas a la adjudicación y elcontrol de la asignación del CréditoFiscal –Ley Nº 22.317–.
• Desarrollar mecanismos de cooperacióninternacional y acciones relativas a dife-rentes procesos de integración educativa;en particular, los relacionados con lospaíses del MERCOSUR, en lo referente ala educación técnico-profesional.
Estas metas se despliegan en distintos pro-gramas y líneas de acción de responsabilidadde nuestra institución, para el período 2003-2007:
VIII
LAS METAS, LOS PROGRAMAS Y LAS LÍNEAS DE
ACCIÓN DEL INSTITUTO NACIONAL DE
EDUCACIÓN TECNOLÓGICA
Programa 1. Formación técnica, media ysuperior no universitaria:
1.1. Homologación y validez nacional detítulos.
1.2. Registro nacional de instituciones deformación técnica.
1.3. Espacios de concertación.
1.4. Perfiles profesionales y ofertas formati-vas.
1.5. Fortalecimiento de la gestión institu-cional; equipamiento de talleres y la-boratorios.
1.6. Prácticas productivas profesiona-lizantes: Aprender emprendiendo.
Programa 2. Crédito fiscal:
2.1. Difusión y asistencia técnica.
2.2. Aplicación del régimen.
2.3. Evaluación y auditoría.
Programa 3. Formación profesional para eldesarrollo local:
3.1. Articulación con las provincias.
3.2. Diseño curricular e institucional.
3.3. Información, evaluación y certifi-cación.
Programa 4.Educación para el trabajo y laintegración social.
Programa 5. Mejoramiento de la enseñanzay del aprendizaje de la Tecnología y de laCiencia:
5.1. Formación continua.
5.2. Desarrollo de recursos didácticos.
Programa 6. Desarrollo de sistemas de infor-mación y comunicaciones:
6.1. Desarrollo de sistemas y redes.
6.2. Interactividad de centros.
Programa 7. Secretaría ejecutiva del ConsejoNacional de Educación Trabajo –CoNE-T–.
Programa 8. Cooperación internacional.
Los materiales de capacitación que, en estaocasión, estamos acercando a la comunidadeducativa a través de la serie “Recursosdidácticos”, se enmarcan en el Programa 5del INET, focalizado en el mejoramiento dela enseñanza y del aprendizaje de la Tec-nología y de la Ciencia, uno de cuyos pro-pósitos es el de:
• Desarrollar materiales de capacitacióndestinados, por una parte, a la actua-lización de los docentes de la educacióntécnico-profesional, en lo que hace a co-nocimientos tecnológicos y científicos; y,por otra, a la integración de los recursosdidácticos generados a través de ellos, enlas aulas y talleres, como equipamientode apoyo para los procesos de enseñanzay de aprendizaje en el área técnica.
Estos materiales didácticos han sido elabora-dos por especialistas del Centro Nacional deEducación Tecnológica del INET y por espe-cialistas convocados a través del Programa delas Naciones Unidas para el Desarrollo–PNUD– desde su línea “Conocimientoscientífico-tecnológicos para el desarrollo deequipos e instrumentos”, a quienes estaDirección expresa su profundo reconoci-miento por la tarea encarada.
María Rosa AlmandozDirectora Ejecutiva del Instituto Nacional de
Educación Tecnológica.Ministerio de Educación, Ciencia y
Tecnología
IX
Desde el Centro Nacional de EducaciónTecnológica –CeNET– encaramos el diseño,el desarrollo y la implementación de proyec-tos innovadores para la enseñanza y el apren-dizaje en educación técnico-profesional.
El CeNET, así:
• Es un ámbito de desarrollo y evaluaciónde metodología didáctica, y de actuali-zación de contenidos de la tecnología yde sus sustentos científicos.
• Capacita en el uso de tecnología a do-centes, profesionales, técnicos, estudian-tes y otras personas de la comunidad.
• Brinda asistencia técnica a autoridades e-ducativas jurisdiccionales y a edu-cadores.
• Articula recursos asociativos, integrandoa los actores sociales involucrados con laEducación Tecnológica.
Desde el CeNET venimos trabajando en dis-tintas líneas de acción que convergen en elobjetivo de reunir a profesores, a especialistasen Educación Tecnológica y a representantesde la industria y de la empresa, en accionescompartidas que permitan que la educacióntécnico-profesional se desarrolle en la escuelade un modo sistemático, enriquecedor, pro-fundo... auténticamente formativo, tanto paralos alumnos como para los docentes.
Una de nuestras líneas de acción es la de di-señar y llevar adelante un sistema de capaci-
tación continua para profesores de educacióntécnico-profesional, implementando trayec-tos de actualización. En el CeNET contamoscon quince unidades de gestión de apren-dizaje en las que se desarrollan cursos,talleres, pasantías, conferencias, encuentros,destinados a cada educador que desee inte-grarse en ellos presencialmente o a distancia.
Otra de nuestras líneas de trabajo asume laresponsabilidad de generar y participar enredes que vinculan al Centro con organismose instituciones educativos ocupados en laeducación técnico-profesional, y con organis-mos, instituciones y empresas dedicados a latecnología en general. Entre estas redes, seencuentra la Red Huitral, que conecta aCeNET con los Centros Regionales deEducación Tecnológica -CeRET- y con lasUnidades de Cultura Tecnológica –UCT–instalados en todo el país.
También nos ocupa la tarea de producirmateriales de capacitación docente. DesdeCeNET hemos desarrollado distintas seriesde publicaciones –todas ellas disponibles enel espacio web www.inet.edu.ar–:
• Educación Tecnológica, que abarca mate-riales que posibilitan una definición cu-rricular del área de la Tecnología en elámbito escolar y que incluye marcosteóricos generales, de referencia, acercadel área en su conjunto y de sus con-tenidos, enfoques, procedimientos yestrategias didácticas más generales.
X
LAS ACCIONES DEL CENTRO NACIONAL DE
EDUCACIÓN TECNOLÓGICA
• Desarrollo de contenidos, nuestra segundaserie de publicaciones, que nuclea fascícu-los de capacitación en los que se profun-diza en los campos de problemas y decontenidos de las distintas áreas del cono-cimiento tecnológico, y que recopila, tam-bién, experiencias de capacitación docentedesarrolladas en cada una de estas áreas.
• Educación con tecnologías, que propicia eluso de tecnologías de la información y dela comunicación como recursos didácti-cos, en las clases de todas las áreas yespacios curriculares.
• Educadores en Tecnología, serie de publica-ciones que focaliza el análisis y las pro-puestas en uno de los constituyentes delproceso didáctico: el profesional queenseña Tecnología, ahondando en losrasgos de su formación, de sus prácticas,de sus procesos de capacitación, de suvinculación con los lineamientos curricu-lares y con las políticas educativas, deinteractividad con sus alumnos, y consus propios saberes y modos de hacer.
• Documentos de la escuela técnica, quedifunde los marcos normativos y curricu-lares que desde el CONET –ConsejoNacional de Educación Técnica- deli-nearon la educación técnica de nuestropaís, entre 1959 y 1995.
• Ciencias para la Educación Tecnológica,que presenta contenidos científicos aso-ciados con los distintos campos de la tec-nología, los que aportan marcos concep-tuales que permiten explicar y funda-mentar los problemas de nuestra área.
• Recursos didácticos, que presenta con-tenidos tecnológicos y científicos,
estrategias –curriculares, didácticas yreferidas a procedimientos de construc-ción– que permiten al profesor de la edu-cación técnico-profesional desarrollar,con sus alumnos, un equipamientoespecífico para integrar en sus clases.
Desde esta última serie de materiales decapacitación, nos proponemos brindar he-rramientas que permitan a los docentes nosólo integrar y transferir sus saberes y capaci-dades, sino también, y fundamentalmente,acompañarlos en su búsqueda de solucionescreativas e innovadoras a las problemáticascon las que puedan enfrentarse en el procesode enseñanza en el área técnica.
En todos los casos, se trata de propuestas deenseñanza basadas en la resolución de pro-blemas, que integran ciencias básicas ytecnología, y que incluyen recursos didácti-cos apropiados para la educacióntécnico–profesional.
Los espacios de problemas tecnológicos, lasconsignas de trabajo, las estrategias deenseñanza, los contenidos involucrados y,finalmente, los recursos didácticos estánplanteados en la serie de publicaciones queaquí presentamos, como un testimonio derealidad que da cuenta de la potencialidadeducativa del modelo de problematización enel campo de la enseñanza y del aprendizajede la tecnología, que esperamos que resultede utilidad para los profesores de la edu-cación técnico-profesional de nuestro país.
Juan Manuel KirschenbaumDirector Nacional del Centro Nacional de
Educación Tecnológica.Instituto Nacional de Educación Tecnológica
XI
Desde esta serie de publicaciones del CentroNacional de Educación Tecnológica, nos pro-ponemos:
• Poner a consideración de los educadoresun equipamiento didáctico a integrar enlos procesos de enseñanza y de apren-dizaje del área técnica que coordinan.
• Contribuir a la actualización de losdocentes de la educación técnico-profe-sional, en lo que hace a conocimientostecnológicos y científicos.
Inicialmente, hemos previsto el desarrollo deveinte publicaciones con las que intentamosabarcar diferentes contenidos de este campocurricular vastísimo que es el de la educacióntécnico-profesional.
En cada una de estas publicaciones es posiblereconocer una estructura didáctica común:
1 Problemas tecnológicos en el aula. Enesta primera parte del material sedescriben situaciones de enseñanza y deaprendizaje del campo de la educacióntécnico-profesional centradas en la re-solución de problemas tecnológicos, y sepresenta una propuesta de equipamientodidáctico, pertinente como recurso pararesolver esas situaciones tecnológicas ydidácticas planteadas.
2 Encuadre teórico para los problemas.En vinculación con los problemas didác-ticos y tecnológicos que constituyen elpunto de partida, se presentan conceptos
tecnológicos y conceptos científicos aso-ciados.
3 Hacia una resolución técnica. Manualde procedimientos para la construc-ción y el funcionamiento del equipo.Aquí se describe el equipo terminado y semuestra su esquema de funcionamiento;se presentan todas sus partes, y los mate-riales, herramientas e instrumentos nece-sarios para su desarrollo; asimismo, sepauta el “paso a paso” de su construc-ción, armado, ensayo y control.
4 El equipo en el aula. En esta parte delmaterial escrito, se retoman las situa-ciones problemáticas iniciales, aportandosugerencias para la inclusión del recursodidáctico construido en las tareas quedocente y alumnos concretan en el aula.
5 La puesta en práctica. Este tramo dela publicación plantea la evaluacióndel material didáctico y de la experien-cia de puesta en práctica de las estrate-gias didácticas sugeridas. Implica unaretroalimentación –de resolución vo-luntaria– de los profesores destinata-rios hacia el Centro Nacional deEducación Tecnológica, así como elpunto de partida para el diseño denuevos equipos.
Esta secuencia de cuestiones y de momentosdidácticos no es azarosa. Intenta replicar –enuna producción escrita– las mismas instanciasde trabajo que los profesores de Tecnologíaponemos en práctica en nuestras clases:
XII
LA SERIE “RECURSOS DIDÁCTICOS”
XIII
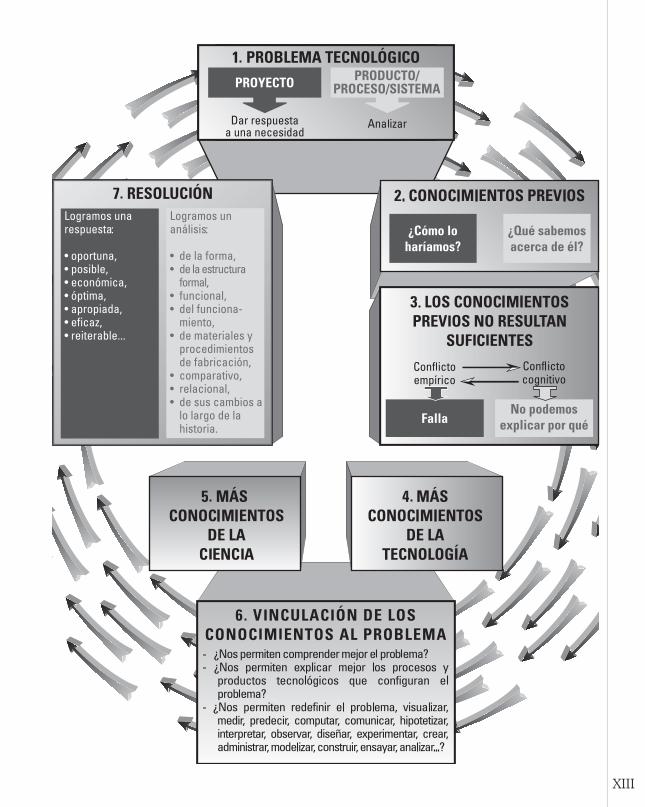
Es a través de este circuito de trabajo (pro-blema-respuestas iniciales-inclusión teórica-respuestas más eficaces) como enseñamos ycomo aprenden nuestros alumnos en el área:
• La tarea comienza cuando el profesorpresenta a sus alumnos una situacióncodificada en la que es posible recono-cer un problema tecnológico; para con-figurar y resolver este problema, es nece-sario que el grupo ponga en marcha unproyecto tecnológico, y que encare análi-sis de productos o de procesos desarro-llados por distintos grupos sociales pararesolver algún problema análogo.Indudablemente, no se trata de cualquierproblema sino de uno que ocasionaobstáculos cognitivos a los alumnosrespecto de un aspecto del mundo artifi-cial que el profesor –en su marco curri-cular de decisiones– ha definido comorelevante.
• El proceso de enseñanza y de aprendiza-je comienza con el planteamiento de esasituación tecnológica seleccionada por elprofesor y con la construcción del espa-cio-problema por parte de los alumnos, ycontinúa con la búsqueda de respuestas.
• Esta detección y construcción derespuestas no se sustenta sólo en losconocimientos que el grupo disponesino en la integración de nuevos con-tenidos.
• El enriquecimiento de los modos de “ver”y de encarar la resolución de un proble-ma tecnológico –por la adquisición denuevos conceptos y de nuevas formastécnicas de intervención en la situación
desencadenante– suele estar distribuidamaterialmente –en equipamiento, enmateriales, en herramientas–.
No es lo mismo contar con este equipamien-to que prescindir de él.
Por esto, lo queintentamos des-de nuestra seriede publicacio-nes es acercar alprofesor distin-tos recursos di-dácticos que a-yuden a sus a-lumnos en estatarea de proble-matización y dei n t e r v e n c i ó n– s u s t e n t a d ateórica y técni-camente– en elmundo tecno-lógico.
Al seleccionar los recursos didácticos queforman parte de nuestra serie de publica-ciones, hemos considerado, en primer térmi-no, su potencialidad para posibilitar, a losalumnos de la educación técnico-profesional,configurar y resolver distintos problemas tec-nológicos.
Y, en segundo término, nos preocupó quecumplieran con determinados rasgos que lespermitieran constituirse en medios eficacesdel conocimiento y en buenos estructurantescognitivos, al ser incluidos en un aula por unprofesor que los ha evaluado como perti-
XIV
Caracterizamos comorecurso didáctico a to-do material o compo-nente informático se-leccionado por un edu-cador, quien ha evalua-do en aquél posibili-dades ciertas para ac-tuar como mediadorentre un problema de larealidad, un contenidoa enseñar y un grupode alumnos, facilitandoprocesos de compren-sión, análisis, profundi-zación, integración,síntesis, transferencia,producción o evalua-ción.
nentes. Las cualidades que consideramosfundamentales en cada equipo que promove-mos desde nuestra serie de publicaciones”Recursos didácticos”, son:
• Modularidad (puede adaptarse a diversosusos).
• Resistencia (puede ser utilizado por losalumnos, sin peligro de romperse confacilidad).
• Seguridad y durabilidad (integrado pormateriales no tóxicos ni peligrosos, ydurables).
• Adaptabilidad (puede ser utilizado en eltaller, aula o laboratorio).
• Acoplabilidad (puede ser unido o combi-nado con otros recursos didácticos).
• Compatibilidad (todos los componentes,bloques y sistemas permiten ser integra-dos entre sí).
• Facilidad de armado y desarmado (posi-bilita pruebas, correcciones e incorpo-ración de nuevas funciones).
• Pertinencia (los componentes, bloquesfuncionales y sistemas son adecuadospara el trabajo con los contenidos cu-rriculares de la educación técnico-pro-fesional).
• Fiabilidad (se pueden realizar las tareaspreestablecidas, de la manera esperada).
• Coherencia (en todos los componentes,bloques funcionales o sistemas se siguenlas mismas normas y criterios para elarmado y utilización).
• Escalabilidad (es posible utilizarlo enproyectos de diferente nivel de com-
plejidad).
• Reutilización (los diversos componentes,bloques o sistemas pueden ser desmonta-dos para volver al estado original).
• Incrementabilidad (posibilidad de iragregando piezas o completando elequipo en forma progresiva).
Haydeé NocetiCoordinadora de la acción “Conocimientoscientífico-tecnológicos para el desarrollo de
equipos e instrumentos”.Centro Nacional de Educación Tecnológica
XV

17.Cargadorsemiautomáticopara máquinasa CNC deaccionamientoelectroneumático
2
Este material de capacitación fuedesarrollado por:
Mariano Fóppoli.Es Técnico Electromecánico (ConsejoNacional de Educación Técnica),Técnico Superior en AdministraciónEducativa y Técnico Superior enConducción Educativa.
Coordinación general:Haydeé Noceti
Diseño didáctico:Ana Rúa
Administración:Adriana Perrone
Monitoreo y evaluación:Laura Irurzun
Diseño gráfico:Tomás Ahumada
Karina LacavaAlejandro Carlos Mertel
Diseño de tapa:Laura Lopresti
Juan Manuel Kirschenbaum
Con la colaboracióndel equipo de profesionales
del Centro Nacionalde Educación Tecnológica
Las metas, los programas y las líneas de acción
del Instituto Nacional de Educación Tecnológica IV
Las acciones del Centro Nacional de Educación Tecnológica VI
La serie “Recursos didácticos” VII
1 Problemas tecnológicos en el aula 4
• El recurso didáctico que proponemos
2 Encuadre teórico para los problemas 8
• ¿Qué es un cargador semiautomático para máquinas a CNC deaccionamiento electroneumático?
• Decisiones acerca del accionamiento neumático
1. Abastecimiento de energía.
2. Elementos de entrada (sensores).
3. Elementos de procesamiento (procesadores)
4. Elementos de maniobra y de accionamiento (actuadores)
• Automatización
• Control numérico por computadora
3 Hacia una resolución técnica.Manual de procedimientos para la construcción yel funcionamiento del equipo 43
• El producto
• Los componentes
• Los materiales, herramientas e instrumentos
• La construcción
• El armado
• El ensayo y el control
• La superación de dificultades
4 El equipo en el aula 59
5 La puesta en práctica 64
Índice

4
A p r o x i m a d a -mente veinticincoaños después delnacimiento delcontrol numéri-co, en 1968, secrea una máqui-na-herramientapolivalente quetiene como fun-ción realizar unaserie de opera-ciones -distintostipos de mecani-zado- en piezasde diferente ta-maño.
En ese mismo añocomienza a fun-cionar en GranBretaña un taller flexible que dispone de uncentro de mecanizado con máquinas de con-trol CNC.
Básicamente, las máquinas de CNC son simi-lares a las máquinas-herramientas conven-cionales; no obstante, existen diferenciasconstructivas entre unas y otras. Una de las
particularidades es que, para mecanizar unapieza en máquina convencional, el trabajadordebe mover de forma manual los carros, conayuda de los volantes, de modo de conseguirel perfil deseado; es el operario quien contro-la la velocidad de corte, el giro de la herra-mienta, la refrigeración y el avance de los ca-rros. En cambio, en las máquinas a controlnumérico, todos los carros de los ejes vanprovistos de motores de avance propio queno requieren girar ningún volante a mano.
El CNC es, entonces, un sistema para con-trolar con precisión la operación de unamáquina, mediante una serie de instruc-ciones codificadas, símbolos que la unidad decontrol puede comprender. Estas instruc-ciones se convierten en pulsos eléctricos decorriente que los motores y controles de lamáquina siguen, para llevar a cabo las opera-ciones sobre una pieza de trabajo.
Los números, letras y símbolos son instruc-ciones codificadas que refieren a distancias,posiciones, funciones o movimientos especí-ficos que la máquina puede comprender almecanizar la pieza. Los dispositivos demedición y de registro incorporados en lasmáquinas-herramientas de control numéricopor computadora aseguran que la pieza queestá manufacturándose sea exacta, mini-mizándose el error humano.
El CNC ha crecido con una velocidad cada
1. UN PROBLEMA TECNOLÓGICO EN EL AULA
Las máquinas-herramientas
creadas con esta misión se
denominan centros de
mecanizado y constituyen
pasos determinantes hacia
un taller flexible. Los cen-
tros de mecanizado, me-
diante un cambio de he-
rramientas, pueden fresar,
agujerear, roscar y recti-
ficar; es decir, sobre una
misma pieza pueden efec-
tuar una serie de opera-
ciones que, tradicionalmen-
te, requería de una línea de
máquinas-herramientas.
El control numérico por computadora -CNC- omáquina de control CNC es aquella máquinacomandada por órdenes de letras y números(alfanuméricas).
5
vez más rápida y su uso seguirá creciendo,dadas las muchas ventajas que le ofrece a laindustria: mayor seguridad del operador,mayor eficiencia del operado, reducción dedesperdicio, tiempos de entrega más cortos,elevado grado de precisión, ejecución deoperaciones complejas de maquinado,menores costos de herramental, mayor pro-ductividad y menores requisitos de espacio.
Entre las desventajas de las máquinas a CNCes posible señalar su gran inversión inicial.
Lo invitamos a analizar distintas situacionesde enseñanza y de aprendizaje que transcu-rren en aulas y talleres de la educación técni-co-profesional y que remiten a este tipo decontrol:
En una escuela técnica de Electromecánica, profesores y alumnos están realizando el análisis tecnológi-co de distintos tipos de líneas de producción, desde las más sencillas -pequeños talleres metalmecáni-cos de producción de piezas mecanizadas en máquinas de CNC-, hasta las más complejas, represen-tadas por líneas de montaje de autopartes o líneas de envasado de fluidos -en estas últimas, el puntode partida es la construcción del envase, y se completan con su llenado y etiquetado, para ser puestosa la venta-.
Los alumnos experimentan con el estudio de las variables que, en cada caso, se consideran para quela línea de producción alcance el objetivo propuesto: tiempos de carga y descarga de material despuésdel maquinado, y repetitividad de esas acciones para poder generar la mayor productividad con elmenor esfuerzo; consideran distintos tipos de resolución con distintas tecnologías intervinientes y,también, estudian los márgenes de variación aceptables del sistema que tienen relación directa con eltipo de semiautomatización elegida.
Los alumnos de "Orientación en montaje electromecánico" han asumido la tarea de diseñar y desa-rrollar el modelo productivo para una empresa de inyección de piezas en plástico con mecanizadofinal en máquinas automáticas de CNC.
Esta empresa, a fin de optimizar su proceso productivo, ha decidido reemplazar el actual abaste-cimiento y carga manual de su línea de elaboración por un sistema semiautomático que ha de mejorarel tiempo, y la calidad y cantidad del producto terminado.
Los alumnos, entonces, se abocan a la tarea de analizar las variables intervinientes:• Tiempos de producción.
• Adaptación de la línea actual a una semiautomática, a través de la cual llega el material a sermecanizado en un torno CNC, por medio de un cargador semiautomático.
Encaran la búsqueda de información relativa a los dispositivos utilizables: distintos tipos deaccionamiento -manual, semiautomático y automático-, diferente construcción y funcionalidad, par-ticularidades en sus sistemas de accionamiento -conformación neumática, eléctrica o electroneumáti-ca-.
Su proyecto prevé el reemplazo de la carga manual de material por un sistema semiautomático, ya quees necesario que las máquinas de CNC estén abastecidas de material constantemente, para no oca-sionar demoras en el programa de mecanizado.
6
En un centro de formación técnico-profesional se plantea a los alumnos del ultimo año analizar dis-tintos tipos de automatismos que se encuentran en líneas de envasado y de mecanizado de produc-tos.
Para estudiar las líneas de envasado, consideran tres diseños tecnológicos: Envasado de yogures,envasado de galletitas y llenado de bebidas gaseosas. Para indagar en el mecanizado de piezas, con-sideran procesos de torneado en CNC con diferentes materiales, fresado en CNC también con distin-tos materiales y -él más completo- un centro de mecanizado.
El análisis determina variables de distinta índole: tiempos de fabricación, necesidad de optimizaciónde producción, características técnicas de las diferentes posibilidades para poder identificar cuál y porqué es la más aconsejable, distintas resoluciones técnicas con particulares tecnologías aplicadas:manualmecánica, semiautomática con la utilización de neumática o electroneumática, o bien total-mente automática con distintos manipuladores y /o PLC -controladores lógicos programables-.
Cumplida esta etapa inicial de estudio de líneas de producción existentes, los alumnos se abocan a:
Cuando los alumnos desarrollan el equipo, su profesor les acerca un nuevo desafío:
Cómo mejorar el abastecimiento de material para máquinas a CNC
Proyectar, diseñar y construir un equipo para alimentar la carga a una línea de mecanizado automa-tizado de alta capacidad operativa, en una industria metalmecánica que fabrica distintos accesoriospara instalaciones sanitarias.
Los requerimientos de este equipo:• Funcional a la línea de fabricación, con traslado de la carga desde un nivel superior y con
abastecimiento por un brazo mecánico que la coloca en el plato del CNC.• Operación electromecánica del sistema, controlada por sensores ópticos; éstos deben dejar caer
un solo material por vez.• Tablero de control independiente.• Integrar por lo menos dos tipos de materiales para la construcción.
Automatización de un sistema de carga manual
A efectos de mejorar el rendimiento en tiempo, cantidad y calidad del proceso productivo, la mismaempresa se propone reemplazar el sistema manual de carga de resolución vertical por uno semiau-tomático.
Dados los requerimientos planteados:• Identifiquen por lo menos dos alternativas de solución. • Justifiquen la elección de una de ellas.• Realicen el diseño del sistema.• Ejecuten el módulo a escala.• Realicen la prueba piloto.• Compatibilicen la adecuación a la línea de producción en función de tiempo-cantidad-calidad.• Realicen el informe técnico.

El cargador semiautomático para máquinas aCNC de accionamiento electroneumáticoque proponemos construir es un equipo quepuede alimentar un centro de mecanizadoautomatizado de alta capacidad operativa.
Es un recurso didáctico eficaz para que losalumnos se capaciten en dar respuestas a losproblemas tecnológicos que le hemosplanteado y a todo otro que requiera:
• compatibilizar losparámetros tiempo-calidad-cantidad endistintos métodos defabricación, ya seasemiautomáticos oautomáticos, identifi-cando tipos de líneasde envasado y fabri-cación;
• optimizar los tipos deabastecimiento y decarga de material exis-tentes en las líneas deproducción manuales,mecánicas o automá-ticas.
El cargador semiautomático para máquinas aCNC de accionamiento electroneumáticopermite abarcar y desarrollar contenidos re-ferentes a la automatización industrial básica,interrelacionando la mecánica clásica con laneumática, la electroneumática y la electrici-dad; a partir de su integración como recursodidáctico, los alumnos pueden desarrollardistintos modelos de automatización indus-trial electroneumática básica.
7
Luego del análisis de varias líneas de montaje, la primera descripción del producto a la que arriba ungrupo de alumnos es:
• Diseño y construcción de una cinta cargadora en forma horizontal por la cual llegará el material a lamáquina de CNC; un robot tendrá que colocar el material en el plato, para ser mecanizado.
Otro grupo propone:
• Desarrollo de un cargador vertical.
Entonces, se escucha la voz de uno de los integrantes del grupo:
- Pero... estas dos soluciones son básicamente mecánicas. No cumplen con el requerimiento de control eléc-trico por sensores de proximidad. Pensemos en otra cosa...
El recurso didáctico que proponemos
8
2. E N C U A D R E T E Ó R I C O PA R A L O SP R O B L E M A S
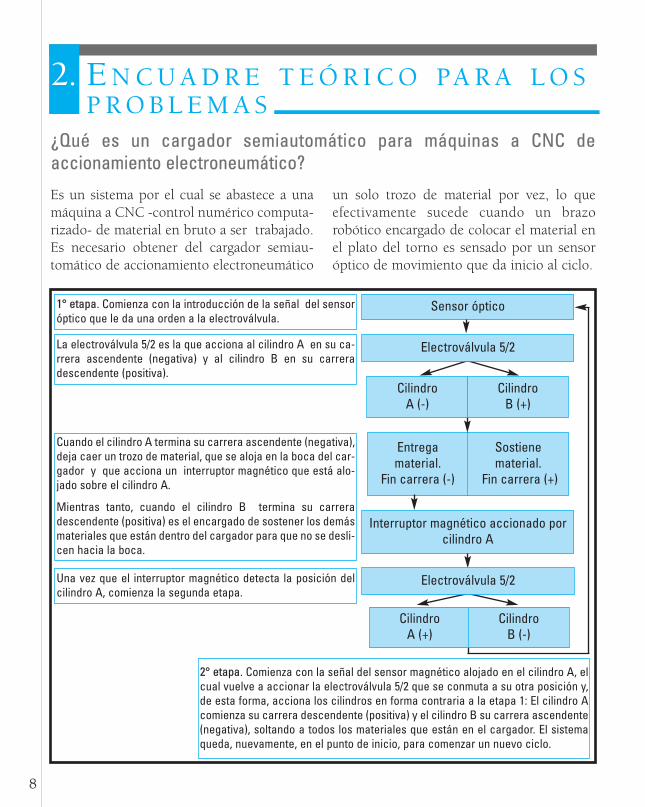
¿Qué es un cargador semiautomático para máquinas a CNC deaccionamiento electroneumático?
Cuando el cilindro A termina su carrera ascendente (negativa),deja caer un trozo de material, que se aloja en la boca del car-gador y que acciona un interruptor magnético que está alo-jado sobre el cilindro A.
Mientras tanto, cuando el cilindro B termina su carreradescendente (positiva) es el encargado de sostener los demásmateriales que están dentro del cargador para que no se desli-cen hacia la boca.
Una vez que el interruptor magnético detecta la posición delcilindro A, comienza la segunda etapa.
2° etapa. Comienza con la señal del sensor magnético alojado en el cilindro A, elcual vuelve a accionar la electroválvula 5/2 que se conmuta a su otra posición y,de esta forma, acciona los cilindros en forma contraria a la etapa 1: El cilindro Acomienza su carrera descendente (positiva) y el cilindro B su carrera ascendente(negativa), soltando a todos los materiales que están en el cargador. El sistemaqueda, nuevamente, en el punto de inicio, para comenzar un nuevo ciclo.
Es un sistema por el cual se abastece a unamáquina a CNC -control numérico computa-rizado- de material en bruto a ser trabajado.Es necesario obtener del cargador semiau-tomático de accionamiento electroneumático
un solo trozo de material por vez, lo queefectivamente sucede cuando un brazorobótico encargado de colocar el material enel plato del torno es sensado por un sensoróptico de movimiento que da inicio al ciclo.
Interruptor magnético accionado porcilindro A
Sensor óptico
Entregamaterial.
Fin carrera (-)
Sostienematerial.
Fin carrera (+)
Electroválvula 5/2
Electroválvula 5/2
CilindroA (+)
CilindroB (-)
CilindroA (-)
CilindroB (+)
1° etapa. Comienza con la introducción de la señal del sensoróptico que le da una orden a la electroválvula.
La electroválvula 5/2 es la que acciona al cilindro A en su ca-rrera ascendente (negativa) y al cilindro B en su carreradescendente (positiva).
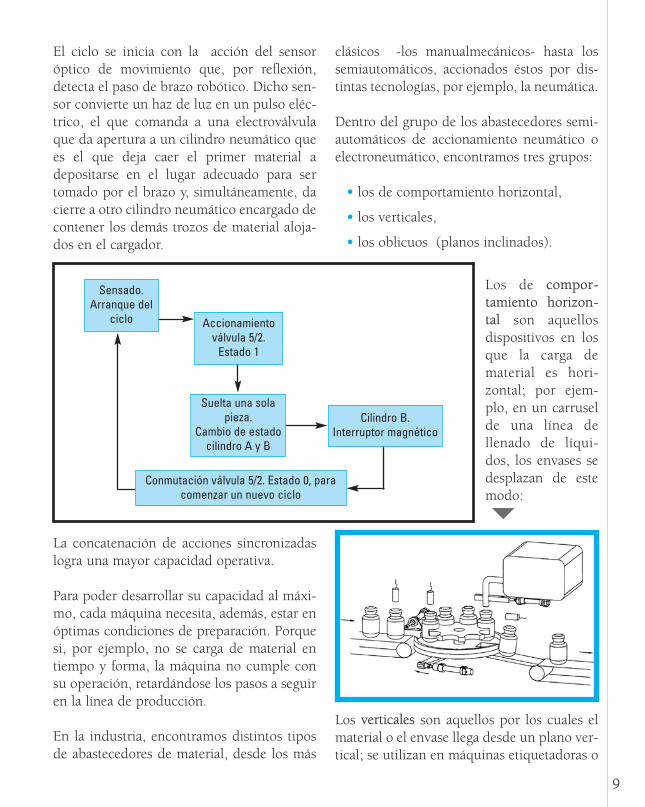
El ciclo se inicia con la acción del sensoróptico de movimiento que, por reflexión,detecta el paso de brazo robótico. Dicho sen-sor convierte un haz de luz en un pulso eléc-trico, el que comanda a una electroválvulaque da apertura a un cilindro neumático quees el que deja caer el primer material adepositarse en el lugar adecuado para sertomado por el brazo y, simultáneamente, dacierre a otro cilindro neumático encargado decontener los demás trozos de material aloja-dos en el cargador.
La concatenación de acciones sincronizadaslogra una mayor capacidad operativa.
Para poder desarrollar su capacidad al máxi-mo, cada máquina necesita, además, estar enóptimas condiciones de preparación. Porquesi, por ejemplo, no se carga de material entiempo y forma, la máquina no cumple consu operación, retardándose los pasos a seguiren la línea de producción.
En la industria, encontramos distintos tiposde abastecedores de material, desde los más
clásicos -los manualmecánicos- hasta lossemiautomáticos, accionados éstos por dis-tintas tecnologías, por ejemplo, la neumática.
Dentro del grupo de los abastecedores semi-automáticos de accionamiento neumático oelectroneumático, encontramos tres grupos:
• los de comportamiento horizontal,
• los verticales,
• los oblicuos (planos inclinados).
Los de compor-tamiento horizon-tal son aquellosdispositivos en losque la carga dematerial es hori-zontal; por ejem-plo, en un carruselde una línea dellenado de líqui-dos, los envases sedesplazan de estemodo:
Los verticales son aquellos por los cuales elmaterial o el envase llega desde un plano ver-tical; se utilizan en máquinas etiquetadoras o
9
Sensado.Arranque del
ciclo Accionamientoválvula 5/2.
Estado 1
Suelta una solapieza.
Cambio de estadocilindro A y B
Cilindro B. Interruptor magnético
Conmutación válvula 5/2. Estado 0, paracomenzar un nuevo ciclo
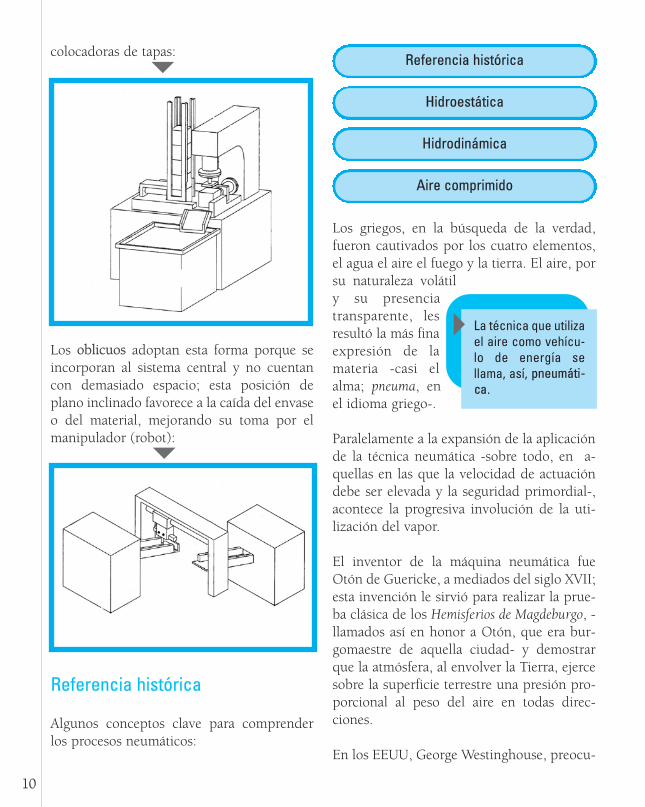
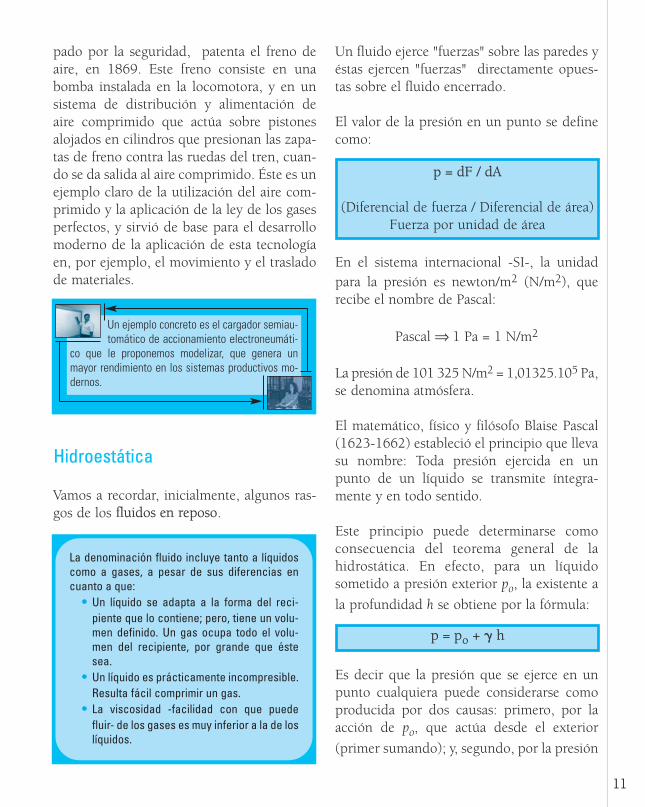
colocadoras de tapas:
Los oblicuos adoptan esta forma porque seincorporan al sistema central y no cuentancon demasiado espacio; esta posición deplano inclinado favorece a la caída del envaseo del material, mejorando su toma por elmanipulador (robot):
Referencia histórica
Algunos conceptos clave para comprenderlos procesos neumáticos:
Los griegos, en la búsqueda de la verdad,fueron cautivados por los cuatro elementos,el agua el aire el fuego y la tierra. El aire, porsu naturaleza volátily su presenciatransparente, lesresultó la más finaexpresión de lamateria -casi elalma; pneuma, enel idioma griego-.
Paralelamente a la expansión de la aplicaciónde la técnica neumática -sobre todo, en a-quellas en las que la velocidad de actuacióndebe ser elevada y la seguridad primordial-,acontece la progresiva involución de la uti-lización del vapor.
El inventor de la máquina neumática fueOtón de Guericke, a mediados del siglo XVII;esta invención le sirvió para realizar la prue-ba clásica de los Hemisferios de Magdeburgo, -llamados así en honor a Otón, que era bur-gomaestre de aquella ciudad- y demostrarque la atmósfera, al envolver la Tierra, ejercesobre la superficie terrestre una presión pro-porcional al peso del aire en todas direc-ciones.
En los EEUU, George Westinghouse, preocu-
10
Referencia histórica
Hidroestática
Hidrodinámica
Aire comprimido
La técnica que utilizael aire como vehícu-lo de energía sellama, así, pneumáti-ca.
pado por la seguridad, patenta el freno deaire, en 1869. Este freno consiste en unabomba instalada en la locomotora, y en unsistema de distribución y alimentación deaire comprimido que actúa sobre pistonesalojados en cilindros que presionan las zapa-tas de freno contra las ruedas del tren, cuan-do se da salida al aire comprimido. Éste es unejemplo claro de la utilización del aire com-primido y la aplicación de la ley de los gasesperfectos, y sirvió de base para el desarrollomoderno de la aplicación de esta tecnologíaen, por ejemplo, el movimiento y el trasladode materiales.
Hidroestática
Vamos a recordar, inicialmente, algunos ras-gos de los fluidos en reposo.
Un fluido ejerce "fuerzas" sobre las paredes yéstas ejercen "fuerzas" directamente opues-tas sobre el fluido encerrado.
El valor de la presión en un punto se definecomo:
En el sistema internacional -SI-, la unidadpara la presión es newton/m2 (N/m2), querecibe el nombre de Pascal:
Pascal 1 Pa = 1 N/m2
La presión de 101 325 N/m2 = 1,01325.105 Pa,se denomina atmósfera.
El matemático, físico y filósofo Blaise Pascal(1623-1662) estableció el principio que llevasu nombre: Toda presión ejercida en unpunto de un líquido se transmite íntegra-mente y en todo sentido.
Este principio puede determinarse comoconsecuencia del teorema general de lahidrostática. En efecto, para un líquidosometido a presión exterior po, la existente a
la profundidad h se obtiene por la fórmula:
Es decir que la presión que se ejerce en unpunto cualquiera puede considerarse comoproducida por dos causas: primero, por laacción de po, que actúa desde el exterior
(primer sumando); y, segundo, por la presión
11
Un ejemplo concreto es el cargador semiau-tomático de accionamiento electroneumáti-
co que le proponemos modelizar, que genera unmayor rendimiento en los sistemas productivos mo-dernos.
La denominación fluido incluye tanto a líquidoscomo a gases, a pesar de sus diferencias encuanto a que:
• Un líquido se adapta a la forma del reci-piente que lo contiene; pero, tiene un volu-men definido. Un gas ocupa todo el volu-men del recipiente, por grande que éstesea.
• Un líquido es prácticamente incompresible.Resulta fácil comprimir un gas.
• La viscosidad -facilidad con que puedefluir- de los gases es muy inferior a la de loslíquidos.
p = dF / dA
(Diferencial de fuerza / Diferencial de área)Fuerza por unidad de área
p = po + � h
proveniente del peso del líquido (segundosumando). Por lo tanto, se deduce que la pre-sión exterior po se ha transmitido íntegra-
mente y, además, en todo sentido, pues laaplicación de la expresión se refiere acualquier punto de la masa líquida.
El principio de Pascal, también se extiende alos gases. Se utiliza en varias aplicaciones téc-nicas, tales como la prensa, el ascensor, elacumulador hidráulico, etc.
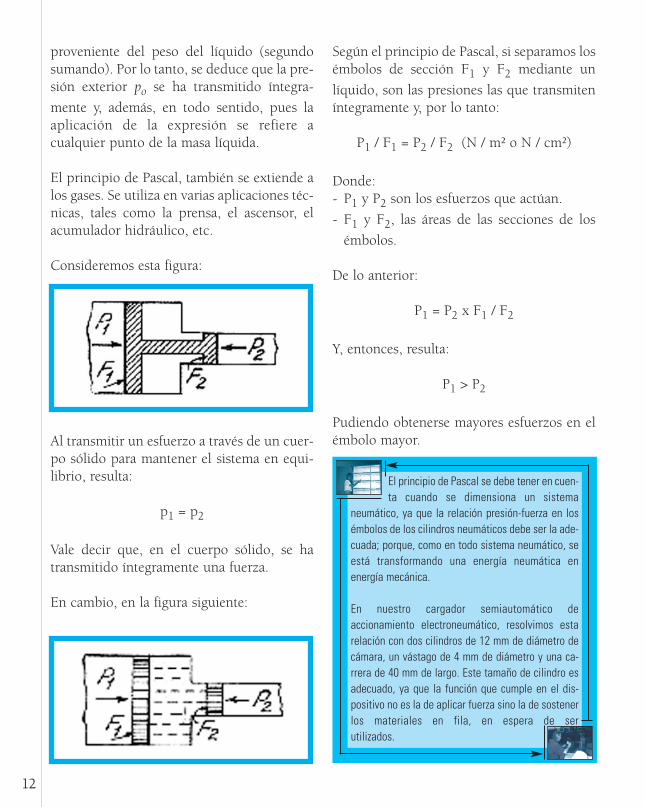
Consideremos esta figura:
Al transmitir un esfuerzo a través de un cuer-po sólido para mantener el sistema en equi-librio, resulta:
p1 = p2
Vale decir que, en el cuerpo sólido, se hatransmitido íntegramente una fuerza.
En cambio, en la figura siguiente:
Según el principio de Pascal, si separamos losémbolos de sección F1 y F2 mediante un
líquido, son las presiones las que transmiteníntegramente y, por lo tanto:
P1 / F1 = P2 / F2 (N / m² o N / cm²)
Donde:- P1 y P2 son los esfuerzos que actúan.
- F1 y F2, las áreas de las secciones de los
émbolos.
De lo anterior:
P1 = P2 x F1 / F2
Y, entonces, resulta:
P1 > P2
Pudiendo obtenerse mayores esfuerzos en elémbolo mayor.
12
El principio de Pascal se debe tener en cuen-ta cuando se dimensiona un sistema
neumático, ya que la relación presión-fuerza en losémbolos de los cilindros neumáticos debe ser la ade-cuada; porque, como en todo sistema neumático, seestá transformando una energía neumática enenergía mecánica.
En nuestro cargador semiautomático deaccionamiento electroneumático, resolvimos estarelación con dos cilindros de 12 mm de diámetro decámara, un vástago de 4 mm de diámetro y una ca-rrera de 40 mm de largo. Este tamaño de cilindro esadecuado, ya que la función que cumple en el dis-positivo no es la de aplicar fuerza sino la de sostenerlos materiales en fila, en espera de ser utilizados.

13
El matemático y físico Arquímedes (287-212 a J.C.) enunció el principio quelleva su nombre: Todo cuerpo sumergido enun líquido recibe un empuje de abajo haciaarriba igual en magnitud al peso del volumendel líquido desalojado.
Este principio puede establecerse aplicandolas leyes del equilibrio de los cuerpos.Suponiendo limitada una porción de líquidoque ocupa un volumen:
Su peso es G y, como el fluido se encuentraen equilibrio, la resultante E de las presionesque el resto del líquido ejerce sobre el volu-men V debe ser igual y contraria a G; valedecir, que equivale a una fuerza dirigida deabajo hacia arriba igual al peso del volumendel líquido desalojado.
Por lo tanto:
Donde:- � es el peso especifico del líquido.
Si en lugar del volumen V se encuentrasumergido un cuerpo sólido de una sustanciacualquiera y el sistema se encuentra en equi-librio, la acción del resto del líquido nopuede variar y, cualquiera fuere la sustanciadel sólido, en todos los casos, la resultante delas presiones verticales es una fuerza dirigida
de abajo hacia arriba e igual al peso del vo-lumen del líquido desalojado por el cuerpo,lo cual confirma el enunciado deArquímedes, que también se extiende a losgases:
Las aplicaciones de este principio sonnumerosas: constituye el fundamento de laflotación y de la ascensión en globos, y se uti-liza para determinar el peso específico de loscuerpos sólidos y líquidos. Muchas veces,hemos observado con qué rapidez asciendenlos globos de papel; otras, hemos vistoescapársele a un niño un globo "inflado congas" (hidrógeno, nitrógeno). En ambos casos,¿por qué se produce ese ascenso? Porquetambién en los gases se cumple el principiode Arquímedes.
Por ejemplo: Si el empuje que recibe uncuerpo es de 12 kg y el peso de ese cuerpo esde 0,500 kg, resulta que 12 kg - 0,500 kg =11,500 kg, los que representan la fuerza conla que asciende el cuerpo.
E = G = � V
Todo cuerpo en el seno de un gas recibe unempuje, de abajo hacia arriba, igual al pesodel gas que desaloja.
La fuerza ascensional es la diferencia entreel empuje recibido y el peso del cuerpo.
Para el desarrollo de nuestro equipo esnecesario tener en cuenta la base
teórica de la hidrostática, que permite dimen-sionar los operadores neumáticos.
Porque, una mala determinación va a generarun mal rendimiento y una inadecuadafuncionalidad del sistema proyectado.
Hidrodinámica
La hidrodinámica estudia el movimiento delos líquidos. Éste puede realizarse en los cur-sos de agua o en canales, en los cuales actúala presión atmosférica sobre la superficielibre; también, en las tuberías a presión oconductos forzados, en los cuales existe unapresión variable, que depende de las condi-ciones en que se realiza la circulación.
En el momento de iniciarse el movimiento deun líquido, entre sus distintas capas se gene-ra una resistencia debida al rozamiento inter-no producido por la viscosidad del fluido,que se opone al deslizamiento y que persistemientras éste continúa.
Al realizarse el movimiento, se vence estaresistencia, lo que se logra consumiendo unacantidad de trabajo -o sea, gastando energíaen la circulación-.
Se llama líquido real a aquel cuyo compor-tamiento es similar al que se presenta en lapráctica; así, es viscoso y gasta una cantidadde energía para vencer la resistencia que seopone al deslizamiento -o sea, la resistenciade rozamiento interno-.
Interesa a la hidrodinámica el estudio deestos líquidos; pero, este estudio no puederealizarse directamente, debido a la comple-jidad que presenta; por esto, se admitenhipótesis que, simplificando el problema,permiten llegar a resultados bastante concor-dantes con los exactos; cuando ello nosucede, con la ayuda de coeficientes de co-rrección -determinados, generalmente, enforma experimental- se aproximan las condi-
ciones del movimiento a las de los líquidosreales.
Una hipótesis introducida en la hidrodinámi-ca es la del líquido perfecto. Se denomina asíal líquido ideal, caracterizado por su incom-presibilidad y por-que sus partículaspueden deslizarseunas sobre otrassin consumir e-nergía. Ello equi-vale a establecerque no existe nin-guna clase de ro-zamiento internoy que, por lo tan-to, el fluido carecede viscosidad.
Al iniciarse el movimiento, en todos los líqui-dos aparece una resistencia de rozamientointerno que persiste mientras continua la cir-culación.
En el aire, la falta de cohesión es característi-ca; se registra la ausencia de una fuerza entrelas moléculas, en circunstancias usuales; suforma cambia a la más mínima fuerza y,además, ocupa el volumen máximodisponible. Así, para utilizar el aire comomedio de trabajo hay que comprimirlo ygenerar un trabajo mecánico con él. Estacaracterística es descripta por la Ley Boyle-Mariotte.
LEY DE BOYLE-MARIOTTE. Expresa que:Los cambios de estado de un gas perfecto quese realicen a temperatura constante manten-drán constante los productos de la presiónpor el volumen de cada estado:
14
La noción del líquidoperfecto es unahipótesis ideal simi-lar a la del puntomaterial o a la de lacontinuidad de laestructura de lamateria, ya que noes posible suponer,en realidad, un líqui-do no viscoso.
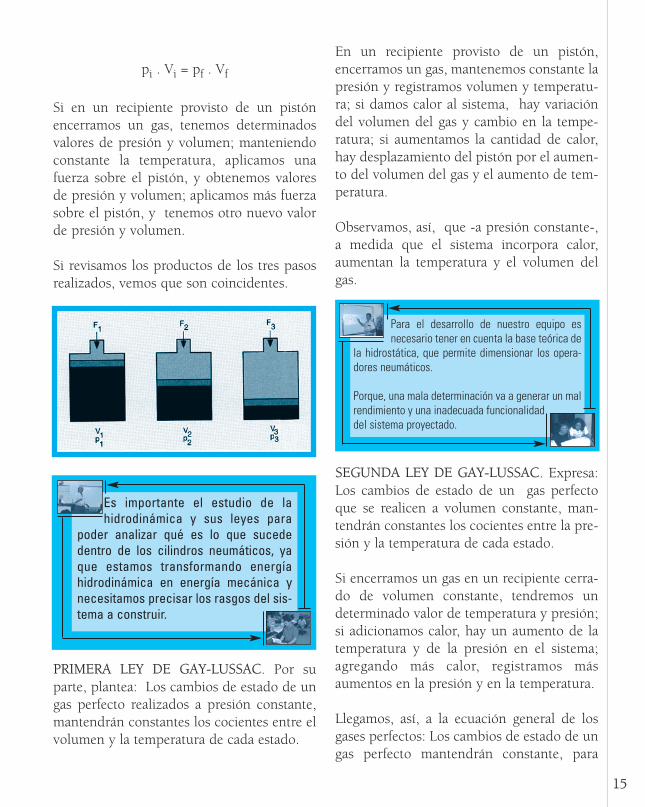
pi . Vi = pf . Vf
Si en un recipiente provisto de un pistónencerramos un gas, tenemos determinadosvalores de presión y volumen; manteniendoconstante la temperatura, aplicamos unafuerza sobre el pistón, y obtenemos valoresde presión y volumen; aplicamos más fuerzasobre el pistón, y tenemos otro nuevo valorde presión y volumen.
Si revisamos los productos de los tres pasosrealizados, vemos que son coincidentes.
PRIMERA LEY DE GAY-LUSSAC. Por suparte, plantea: Los cambios de estado de ungas perfecto realizados a presión constante,mantendrán constantes los cocientes entre elvolumen y la temperatura de cada estado.
En un recipiente provisto de un pistón,encerramos un gas, mantenemos constante lapresión y registramos volumen y temperatu-ra; si damos calor al sistema, hay variacióndel volumen del gas y cambio en la tempe-ratura; si aumentamos la cantidad de calor,hay desplazamiento del pistón por el aumen-to del volumen del gas y el aumento de tem-peratura.
Observamos, así, que -a presión constante-,a medida que el sistema incorpora calor,aumentan la temperatura y el volumen delgas.
SEGUNDA LEY DE GAY-LUSSAC. Expresa:Los cambios de estado de un gas perfectoque se realicen a volumen constante, man-tendrán constantes los cocientes entre la pre-sión y la temperatura de cada estado.
Si encerramos un gas en un recipiente cerra-do de volumen constante, tendremos undeterminado valor de temperatura y presión;si adicionamos calor, hay un aumento de latemperatura y de la presión en el sistema;agregando más calor, registramos másaumentos en la presión y en la temperatura.
Llegamos, así, a la ecuación general de losgases perfectos: Los cambios de estado de ungas perfecto mantendrán constante, para
15
Es importante el estudio de lahidrodinámica y sus leyes para
poder analizar qué es lo que sucededentro de los cilindros neumáticos, yaque estamos transformando energíahidrodinámica en energía mecánica ynecesitamos precisar los rasgos del sis-tema a construir.
Para el desarrollo de nuestro equipo esnecesario tener en cuenta la base teórica de
la hidrostática, que permite dimensionar los opera-dores neumáticos.
Porque, una mala determinación va a generar un malrendimiento y una inadecuada funcionalidaddel sistema proyectado.
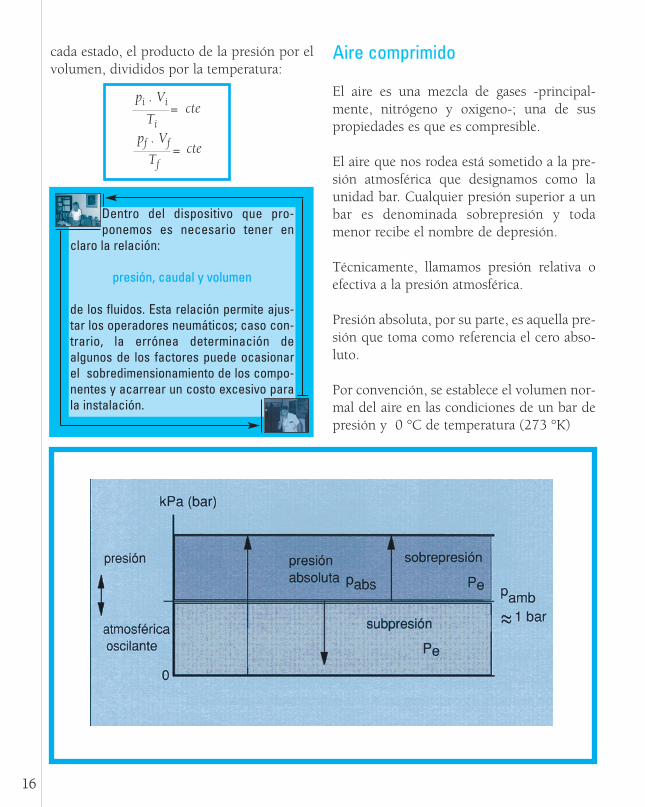
cada estado, el producto de la presión por elvolumen, divididos por la temperatura:
Aire comprimido
El aire es una mezcla de gases -principal-mente, nitrógeno y oxigeno-; una de suspropiedades es que es compresible.
El aire que nos rodea está sometido a la pre-sión atmosférica que designamos como launidad bar. Cualquier presión superior a unbar es denominada sobrepresión y todamenor recibe el nombre de depresión.
Técnicamente, llamamos presión relativa oefectiva a la presión atmosférica.
Presión absoluta, por su parte, es aquella pre-sión que toma como referencia el cero abso-luto.
Por convención, se establece el volumen nor-mal del aire en las condiciones de un bar depresión y 0 °C de temperatura (273 °K)
16
Dentro del dispositivo que pro-ponemos es necesario tener en
claro la relación:
presión, caudal y volumen
de los fluidos. Esta relación permite ajus-tar los operadores neumáticos; caso con-trario, la errónea determinación dealgunos de los factores puede ocasionarel sobredimensionamiento de los compo-nentes y acarrear un costo excesivo parala instalación.
pi . Vi
Ti=
=
cte
pf . Vf
Tfcte
Decisiones acerca delaccionamiento neumático
La tecnologíaneumática juegaun papel impor-tante en las reso-luciones mecáni-cas desde hacemucho tiempo; esincluida cada vezmás en el desa-rrollo de aplica-ciones automati-zadas para la de-tección de estadosmediante senso-res, para el proce-samiento de información a través de proce-sadores, para el accionamiento de actua-dores, para elementos de control, y para laejecución de trabajos y de actuadores.
Para controlar máquinas y equipos, suele sernecesario efectuar una concatenación lógicay compleja de estados y conexiones, me-diante la actuación conjunta de sensores,procesadores, elementos de accionamiento yactuadores incluidos en un sistema neumáti-co o parcialmente neumático.
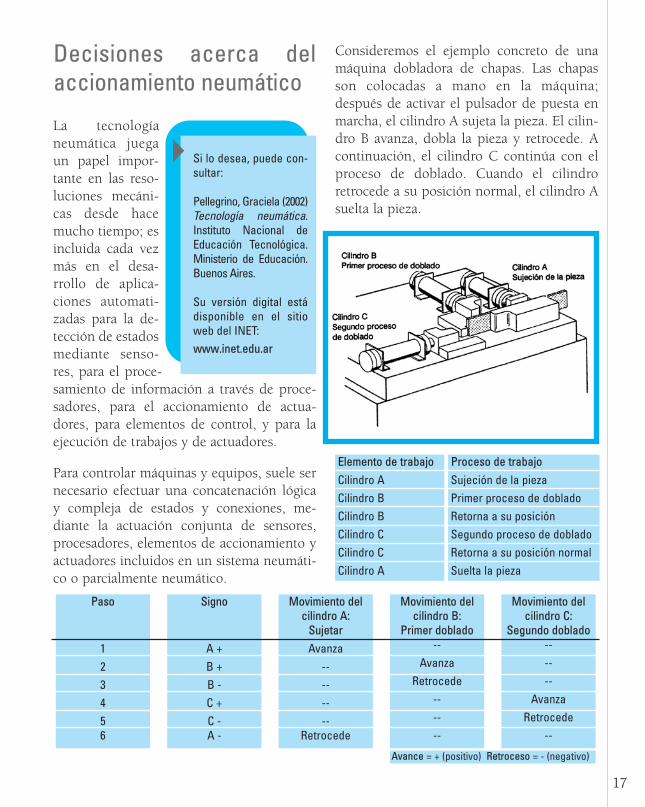
Consideremos el ejemplo concreto de unamáquina dobladora de chapas. Las chapasson colocadas a mano en la máquina;después de activar el pulsador de puesta enmarcha, el cilindro A sujeta la pieza. El cilin-dro B avanza, dobla la pieza y retrocede. Acontinuación, el cilindro C continúa con elproceso de doblado. Cuando el cilindroretrocede a su posición normal, el cilindro Asuelta la pieza.
17
Si lo desea, puede con-sultar:
Pellegrino, Graciela (2002)Tecnología neumática.Instituto Nacional deEducación Tecnológica.Ministerio de Educación.Buenos Aires.
Su versión digital estádisponible en el sitioweb del INET: www.inet.edu.ar
Elemento de trabajoCilindro ACilindro BCilindro BCilindro CCilindro C Cilindro A
Proceso de trabajoSujeción de la piezaPrimer proceso de dobladoRetorna a su posición Segundo proceso de dobladoRetorna a su posición normalSuelta la pieza
Paso
123456
Signo
A +B +B -C +C -A -
Movimiento delcilindro A:
SujetarAvanza
--------
Retrocede
Movimiento delcilindro B:
Primer doblado--
AvanzaRetrocede
------
Movimiento delcilindro C:
Segundo doblado------
AvanzaRetrocede
--
Avance = + (positivo) Retroceso = - (negativo)
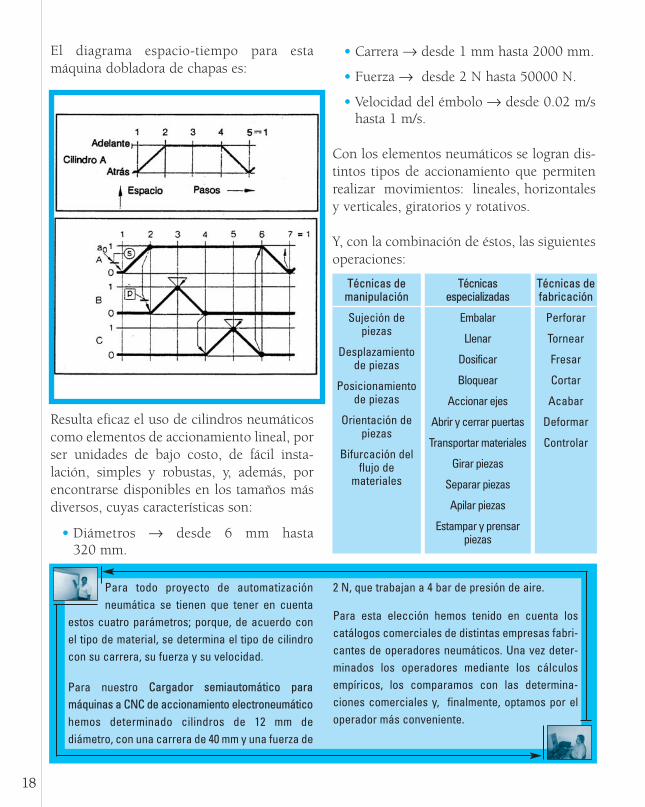
El diagrama espacio-tiempo para estamáquina dobladora de chapas es:
Resulta eficaz el uso de cilindros neumáticoscomo elementos de accionamiento lineal, porser unidades de bajo costo, de fácil insta-lación, simples y robustas, y, además, porencontrarse disponibles en los tamaños másdiversos, cuyas características son:
• Diámetros desde 6 mm hasta 320 mm.
• Carrera desde 1 mm hasta 2000 mm.
• Fuerza desde 2 N hasta 50000 N.
• Velocidad del émbolo desde 0.02 m/shasta 1 m/s.
Con los elementos neumáticos se logran dis-tintos tipos de accionamiento que permitenrealizar movimientos: lineales, horizontalesy verticales, giratorios y rotativos.
Y, con la combinación de éstos, las siguientesoperaciones:
18
Para todo proyecto de automatizaciónneumática se tienen que tener en cuenta
estos cuatro parámetros; porque, de acuerdo conel tipo de material, se determina el tipo de cilindrocon su carrera, su fuerza y su velocidad.
Para nuestro Cargador semiautomático paramáquinas a CNC de accionamiento electroneumáticohemos determinado cilindros de 12 mm dediámetro, con una carrera de 40 mm y una fuerza de
2 N, que trabajan a 4 bar de presión de aire.
Para esta elección hemos tenido en cuenta loscatálogos comerciales de distintas empresas fabri-cantes de operadores neumáticos. Una vez deter-minados los operadores mediante los cálculosempíricos, los comparamos con las determina-ciones comerciales y, finalmente, optamos por eloperador más conveniente.
Técnicas demanipulación
Sujeción depiezas
Desplazamientode piezas
Posicionamientode piezas
Orientación depiezas
Bifurcación delflujo de
materiales
Técnicas defabricación
Perforar
Tornear
Fresar
Cortar
Acabar
Deformar
Controlar
Técnicasespecializadas
Embalar
Llenar
Dosificar
Bloquear
Accionar ejes
Abrir y cerrar puertas
Transportar materiales
Girar piezas
Separar piezas
Apilar piezas
Estampar y prensarpiezas
19
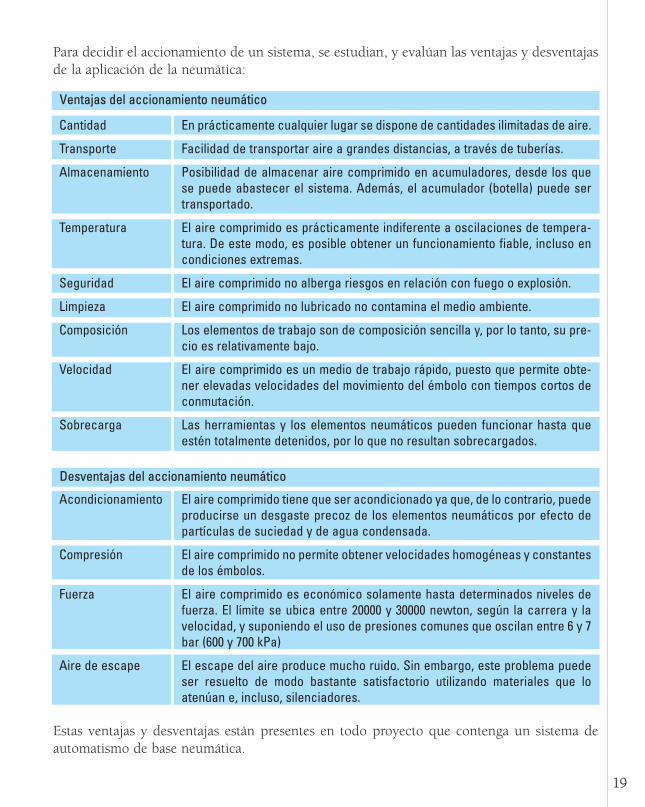
Para decidir el accionamiento de un sistema, se estudian, y evalúan las ventajas y desventajasde la aplicación de la neumática:
Cantidad
Transporte
Almacenamiento
Temperatura
Seguridad
Limpieza
Composición
Velocidad
Sobrecarga
En prácticamente cualquier lugar se dispone de cantidades ilimitadas de aire.
Facilidad de transportar aire a grandes distancias, a través de tuberías.
Posibilidad de almacenar aire comprimido en acumuladores, desde los quese puede abastecer el sistema. Además, el acumulador (botella) puede sertransportado.
El aire comprimido es prácticamente indiferente a oscilaciones de tempera-tura. De este modo, es posible obtener un funcionamiento fiable, incluso encondiciones extremas.
El aire comprimido no alberga riesgos en relación con fuego o explosión.
El aire comprimido no lubricado no contamina el medio ambiente.
Los elementos de trabajo son de composición sencilla y, por lo tanto, su pre-cio es relativamente bajo.
El aire comprimido es un medio de trabajo rápido, puesto que permite obte-ner elevadas velocidades del movimiento del émbolo con tiempos cortos deconmutación.
Las herramientas y los elementos neumáticos pueden funcionar hasta queestén totalmente detenidos, por lo que no resultan sobrecargados.
Ventajas del accionamiento neumático
Acondicionamiento
Compresión
Fuerza
Aire de escape
El aire comprimido tiene que ser acondicionado ya que, de lo contrario, puedeproducirse un desgaste precoz de los elementos neumáticos por efecto departículas de suciedad y de agua condensada.
El aire comprimido no permite obtener velocidades homogéneas y constantesde los émbolos.
El aire comprimido es económico solamente hasta determinados niveles defuerza. El límite se ubica entre 20000 y 30000 newton, según la carrera y lavelocidad, y suponiendo el uso de presiones comunes que oscilan entre 6 y 7bar (600 y 700 kPa)
El escape del aire produce mucho ruido. Sin embargo, este problema puedeser resuelto de modo bastante satisfactorio utilizando materiales que loatenúan e, incluso, silenciadores.
Desventajas del accionamiento neumático
Estas ventajas y desventajas están presentes en todo proyecto que contenga un sistema deautomatismo de base neumática.
Por esto, antes de optar por el uso de sis-temas neumáticos de mando y de trabajo, esoportuno efectuar una comparación de laneumática con tecnologías de otra índole.
La evaluación correspondiente debe referirseal sistema completo, empezando por lasseñales de entrada (sensores), pasando porlos componentes de mando (procesadores), yllegando hasta los órganos de maniobra y losactuadores.
Selección del sistema
En la práctica, no siempre es sencillo elegir elsistema más adecuado. Además de las exi-gencias que plantea la aplicación concreta, esnecesario tomar en cuenta las condicionesgenerales imperantes, tales como el lugar deaplicación, las influencias del medio ambien-te, los recursos humanos disponibles para elmantenimiento del sistema, etc.; con fre-cuencia, estas circunstancias están en francacontradicción con la solución teóricamenteideal del problema e inciden, por tanto, en lasolución por la que se opte.
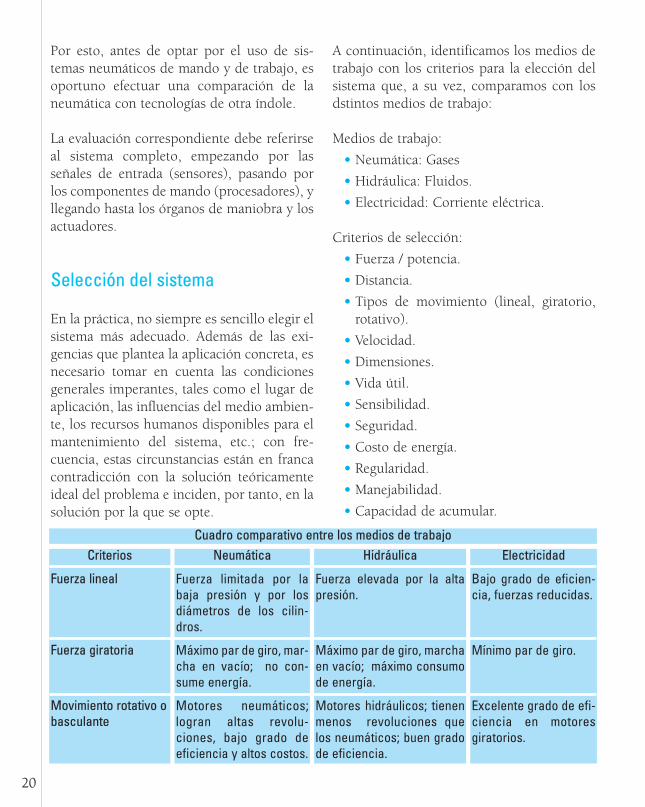
A continuación, identificamos los medios detrabajo con los criterios para la elección delsistema que, a su vez, comparamos con losdstintos medios de trabajo:
Medios de trabajo:
• Neumática: Gases
• Hidráulica: Fluidos.
• Electricidad: Corriente eléctrica.
Criterios de selección:
• Fuerza / potencia.
• Distancia.
• Tipos de movimiento (lineal, giratorio,rotativo).
• Velocidad.
• Dimensiones.
• Vida útil.
• Sensibilidad.
• Seguridad.
• Costo de energía.
• Regularidad.
• Manejabilidad.
• Capacidad de acumular.
20
Cuadro comparativo entre los medios de trabajoCriterios
Fuerza lineal
Fuerza giratoria
Movimiento rotativo obasculante
Neumática
Fuerza limitada por labaja presión y por losdiámetros de los cilin-dros.
Máximo par de giro, mar-cha en vacío; no con-sume energía.
Motores neumáticos;logran altas revolu-ciones, bajo grado deeficiencia y altos costos.
Hidráulica
Fuerza elevada por la altapresión.
Máximo par de giro, marchaen vacío; máximo consumode energía.
Motores hidráulicos; tienenmenos revoluciones quelos neumáticos; buen gradode eficiencia.
Electricidad
Bajo grado de eficien-cia, fuerzas reducidas.
Mínimo par de giro.
Excelente grado de efi-ciencia en motoresgiratorios.
La elección de uno u otro tipo de sistema estáfuertemente condicionada por el tipo deindustria.
La neumática es adoptada por casi la mayoríade las líneas de empacado y llenado de mer-cadería; integra sistemas utilizados en laindustria farmacéutica y en la industria de losalimentos. En la industria farmacéutica, esnormal encontrar dispositivos neumáticos deemblistado de pastillas y llenado de tubos decremas; en la industria de los alimentos, tam-bién es común implementar este tipo de sis-tema llenando envases de leche y de yogur,ya que una de las cualidades que tienen los
sistemas neumáticos es la limpieza y ladisponibilidad de un ambiente inocuo de tra-bajo.
Los sistemas neumáticos están compuestospor una concatenación de diversos grupos deelementos.
Estos grupos de elementos conforman unavía para la transmisión de las señales demando, desde las emisiones de señales(entradas) hasta la ejecución del trabajo (sa-lida).
Los órganos de maniobra se encargan de con-
21
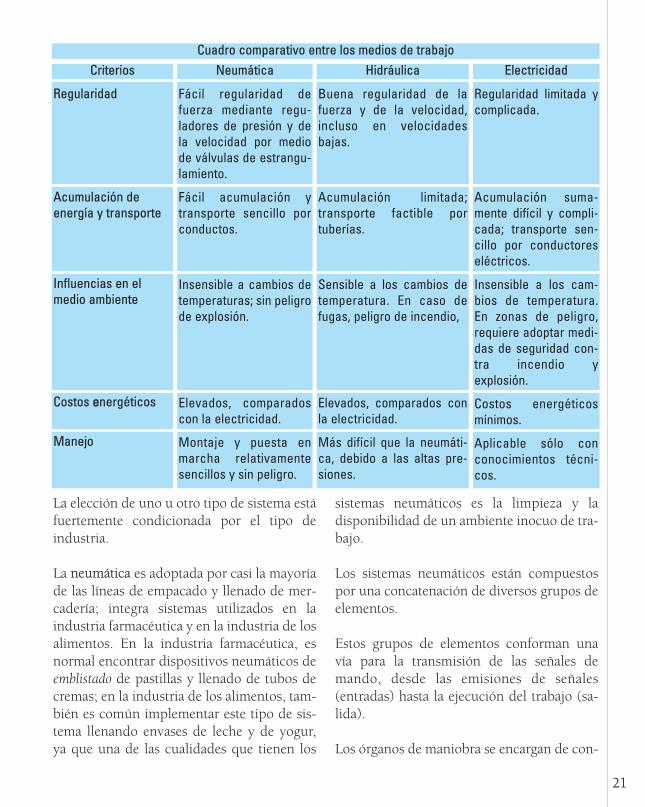
Cuadro comparativo entre los medios de trabajoCriterios
Regularidad
Acumulación deenergía y transporte
Influencias en elmedio ambiente
Costos eenergéticos
Manejo
Neumática
Fácil regularidad defuerza mediante regu-ladores de presión y dela velocidad por mediode válvulas de estrangu-lamiento.
Fácil acumulación ytransporte sencillo porconductos.
Insensible a cambios detemperaturas; sin peligrode explosión.
Elevados, comparadoscon la electricidad.
Montaje y puesta enmarcha relativamentesencillos y sin peligro.
Hidráulica
Buena regularidad de lafuerza y de la velocidad,incluso en velocidadesbajas.
Acumulación limitada;transporte factible portuberías.
Sensible a los cambios detemperatura. En caso defugas, peligro de incendio,
Elevados, comparados conla electricidad.
Más difícil que la neumáti-ca, debido a las altas pre-siones.
Electricidad
Regularidad limitada ycomplicada.
Acumulación suma-mente difícil y compli-cada; transporte sen-cillo por conductoreseléctricos.
Insensible a los cam-bios de temperatura.En zonas de peligro,requiere adoptar medi-das de seguridad con-tra incendio yexplosión.
Costos energéticosmínimos.
Aplicable sólo conconocimientos técni-cos.
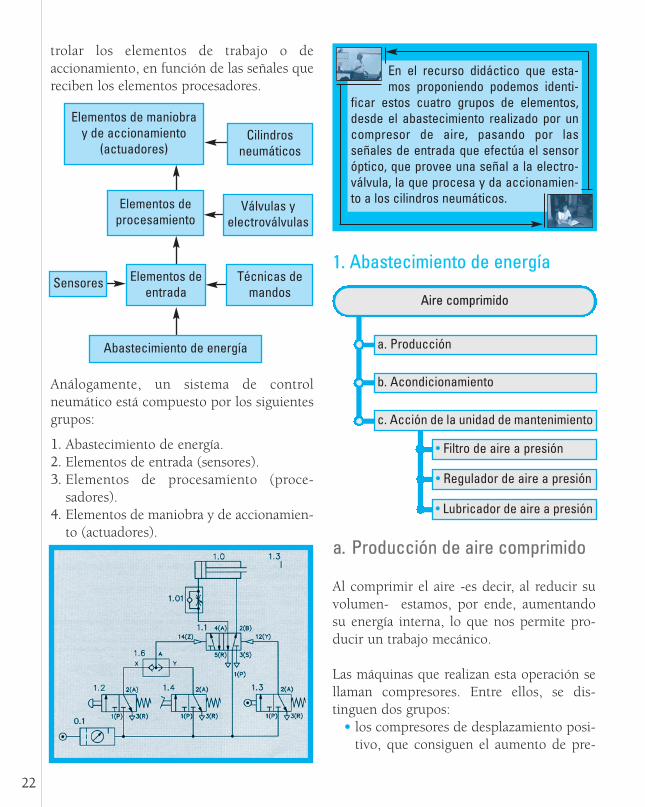
trolar los elementos de trabajo o deaccionamiento, en función de las señales quereciben los elementos procesadores.
Análogamente, un sistema de controlneumático está compuesto por los siguientesgrupos:
1. Abastecimiento de energía.2. Elementos de entrada (sensores).3. Elementos de procesamiento (proce-
sadores). 4. Elementos de maniobra y de accionamien-
to (actuadores).
1. Abastecimiento de energía
a. Producción de aire comprimido
Al comprimir el aire -es decir, al reducir suvolumen- estamos, por ende, aumentandosu energía interna, lo que nos permite pro-ducir un trabajo mecánico.
Las máquinas que realizan esta operación sellaman compresores. Entre ellos, se dis-tinguen dos grupos:
• los compresores de desplazamiento posi-tivo, que consiguen el aumento de pre-
22
Elementos de maniobray de accionamiento
(actuadores)Cilindros
neumáticos
Elementos deprocesamiento
Válvulas yelectroválvulas
Elementos deentrada
Técnicas demandos
Sensores
Abastecimiento de energía
En el recurso didáctico que esta-mos proponiendo podemos identi-
ficar estos cuatro grupos de elementos,desde el abastecimiento realizado por uncompresor de aire, pasando por lasseñales de entrada que efectúa el sensoróptico, que provee una señal a la electro-válvula, la que procesa y da accionamien-to a los cilindros neumáticos.
Aire comprimido
a. Producción
b. Acondicionamiento
c. Acción de la unidad de mantenimiento
• Filtro de aire a presión
• Regulador de aire a presión
• Lubricador de aire a presión
sión disminuyendo el volumen de unadeterminada masa del gas;
• los compresores dinámicos, que son losque logran el aumento de presión con elaumento de la energía cinética que trans-fieren al gas
Los compresores de desplazamiento positivoson de acción rectilínea a pistón; su fun-cionamiento simple consiste en encerrar enel cilindro una determinada cantidad de aireingresado por la válvula de admisión, com-primir su volumen por el desplazamiento delpistón y entregarlo mediante la válvula deescape. Los compresores pueden sermonocilíndricos o bicilíndricos con refrige-ración intermedia, horizontales o verticalesen v, w, opuestos, pendulares.
Los compresores a pistón secos actúan sinlubricación, para evitar la posible contami-nación por aceite o productos húmedos.Tienen una posibilidad operativa muyamplia, desde presiones moderadas y cau-dales insignificantes, hasta grandes presionesy grandes caudales.
En todo dispositivo o sistema neumático sedebe incluir un compresor de aire; no impor-ta cuál de los distintos tipos comerciales sea,pero sí teniendo en cuenta su autonomía y eltipo de proceso al que debe suministrar elaire comprimido.
b. Acondicionamiento del airecomprimido
En el aire hay pequeñas cantidades de aguaen forma de vapor, que varían en relacióncon la temperatura: A mayor temperatura,mayor cantidad de agua absorbida -que llegaa un limite que se llama saturación-.
Como el aire incorpora agua fácilmente, eva-luamos que, para ciertas condiciones de tem-peratura y presión, el contenido varía entrecero -para el aire seco- y toda la que puedacontener el aire saturado de humedad. Paraesto, tenemos en cuenta la humedad relativaque relaciona la cantidad de agua que tiene elaire con la que podría tener si estuviera satu-rado. Esta relación resulta del cociente entreel cien por cien de humedad absoluta y lahumedad de saturación.
Si tomamos una muestra cualquiera de aire yla sometemos a un enfriamiento sin variar sucontenido de agua, llega un momento en elque se satura. Esto es lo que llamamos puntode rocío. La temperatura en la que este fenó-meno se verifica se llama temperatura delpunto de rocío.
Si ejercemos presión, hay variación de lahumedad de saturación; por tanto, hayvariación del punto de rocío.
Si tenemos una cantidad de aire -en determi-nadas condiciones de temperatura y dehumedad relativa- y la comenzamos a com-primir, sucede que:
• si la muestra no está saturada, lahumedad absoluta permanece constante,la humedad de saturación disminuye, la
23
Para nuestro modelo, es suficiente con uncompresor individual de desplazamiento
positivo (a pistón seco).
Para evaluar cuál conviene en el equipo cargador queusted y sus alumnos están desarrollando, tenga encuenta el espacio, y la instalación dentro delaula o del taller en donde va a estar colocado.
humedad relativa aumenta y el punto derocío, también; pero,
• una vez que alcanzó la saturación, lahumedad absoluta disminuye, la hu-medad de saturación también disminu-ye, la humedad relativa es constante eigual al cien por cien, el punto de rocío esconstante y se elimina el exceso de aguaal estado liquido.
Así, llegamos a la conclusión de que es másconveniente realizar el tratamiento del aireuna vez que lo hayamos comprimido.
Ahora, el aire que se aspiró es el que se com-prime; por tanto, no varía la cantidad deagua contenida. Si provocamos un enfri-amiento, al pasar a otro estado en el que latemperatura es menor sin variar la presión,obtenemos una disminución del contenidode agua.
En todo sistema neumático, el airecomprimido -una vez generado y antes depasar a ser utilizado- se acondiciona. Esteacondicionamiento del aire a presión es reali-zado por las unidades de mantenimiento,antepuestas al mando neumático.
c. Acción de la unidad de manteni-miento
La unidad de mantenimiento está compuestapor:
• Filtro de aire a presión.
• Regulador de aire a presión.
• Lubricador de aire a presión.
FILTRADO DEL AIRE A PRESIÓN. El con-densado, las impurezas y demasiada cantidadde aceite pueden ser motivo de desgaste depiezas móviles y de juntas de elementosneumáticos. Estas sustancias pueden conta-minar el medio ambiente a través de fugas enel sistema; por eso, si no se utilizan filtros, esposible que los productos queden inutiliza-dos por efecto de la suciedad (por ejemplo,en el caso de la producción de alimentos, ode productos farmacéuticos o químicos).
El abastecimiento de aire a presión de buenacalidad en un sistema neumático depende,en gran medida, del filtro que se adopte.
REGULACIÓN DEL AIRE A PRESIÓN. Elnivel de la presión del aire comprimido gene-rado por el compresor no es constante. Lasoscilaciones de la presión en las tuberíaspueden incidir negativamente en las carac-terísticas de conmutación de las válvulas y enla velocidad de los cilindros. En consecuen-cia, es importante que la presión del aire seaconstante para que el equipo no ocasioneproblemas.
El nivel de la presión debe regirse siemprepor las exigencias que plantea la parte corres-pondiente del sistema.
Las presiones de trabajo que generan mayorrendimiento en los sistemas neumáticos son:
24
El tipo de emisor empleado ennuestro equipo didáctico es un
diodo emisor de luz LED de alta luminosi-dad que permite ingresar mayor canti-dad de luz a una fibra óptica.

• 6 bar en la sección de operación,
• 4 bar en la sección de mando.
LUBRICACIÓN DEL AIRE A PRESIÓN. Entérminos generales, el aire a presión no selubrica. No obstante, si las partes móviles deválvulas y cilindros requieren de lubricación,debemos enriquecer constantemente el aire apresión, con una cantidad suficiente deaceite. Un valor orientativo es de 1 hasta 10gotas, por metro cúbico de aire a presión.
2. Elementos de entrada (sensores)
Sin la técnica demandos, la tec-nología no hubie-ra podido alcan-zar los niveles ac-tuales; no hay es-pecialidad tecno-lógica que puedaprescindir de losmandos. Para quelos técnicos dediversas especiali-dades (neumática, hidráulica, electricidad yelectrónica) cooperen entre sí, es indispensa-ble que hablen un idioma común. Esto sig-nifica que dispongan de definiciones precisasde los conceptos, con criterios básicos acep-tados por todos.
Estos fundamentos de la técnica de mandostienen validez general, independientementede la energía de control o de trabajo que se
25
Si la presión de trabajo es más ele-vada, no se aprovecha debidamente laenergía; y, además, el desgaste es mayory puede ocasionar -específicamente, paranuestro cargador- que, al ser tan rápida laconmutación de los operadores neumáti-cos, no deje pasar el trozo de material a laboquilla del cargador.
Si la presión es menor o no constante, dis-minuye la eficiencia del sistema, lo cualtambién ocasiona dificultad para el car-gador.
Como síntesis: El aire a presión debe serregulado, para que todos los ciclos de tra-bajo empleen los mismos tiempos de con-mutación de los operadoresneumáticos.
Todo sistema neumático debe contar conuna unidad de mantenimiento queacondicione el aire a presión que da alsistema una mayor eficacia y vida útil.
Nuestro dispositivo, el cargador semi-automático para máquinas a CNC de
accionamiento electroneumático, se componede dos instancias:
• una de mando, que realiza los esfuerzos"cerebrales",
• otra de trabajo, que realiza los esfuerzos"musculares".
La de mando es una etapa eléctrica; en ella, elsensor da una señal eléctrica que acciona elelectroimán de la electroválvula, conmután-dola y accionando el circuito de traba-jo.
La técnica de mandosse refiere a aquel pro-ceso dentro de un sis-tema que tiene comoconsecuencia que unao varias magnitudes deentrada incidan sobreuna o varias magni-tudes de salida, a raízde una lógica intrínsecadel sistema.
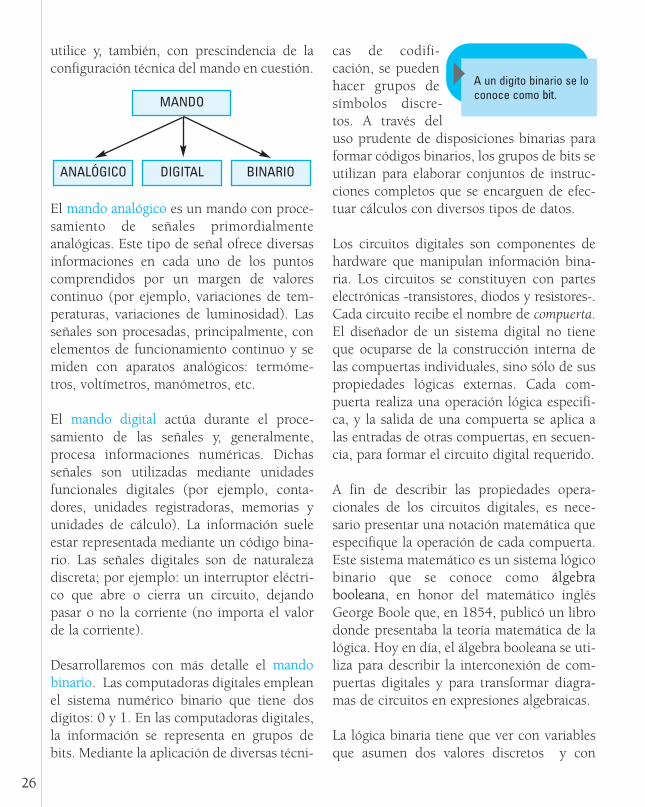
utilice y, también, con prescindencia de laconfiguración técnica del mando en cuestión.
El mando analógico es un mando con proce-samiento de señales primordialmenteanalógicas. Este tipo de señal ofrece diversasinformaciones en cada uno de los puntoscomprendidos por un margen de valorescontinuo (por ejemplo, variaciones de tem-peraturas, variaciones de luminosidad). Lasseñales son procesadas, principalmente, conelementos de funcionamiento continuo y semiden con aparatos analógicos: termóme-tros, voltímetros, manómetros, etc.
El mando digital actúa durante el proce-samiento de las señales y, generalmente,procesa informaciones numéricas. Dichasseñales son utilizadas mediante unidadesfuncionales digitales (por ejemplo, conta-dores, unidades registradoras, memorias yunidades de cálculo). La información sueleestar representada mediante un código bina-rio. Las señales digitales son de naturalezadiscreta; por ejemplo: un interruptor eléctri-co que abre o cierra un circuito, dejandopasar o no la corriente (no importa el valorde la corriente).
Desarrollaremos con más detalle el mandobinario. Las computadoras digitales empleanel sistema numérico binario que tiene dosdígitos: 0 y 1. En las computadoras digitales,la información se representa en grupos debits. Mediante la aplicación de diversas técni-
cas de codifi-cación, se puedenhacer grupos desímbolos discre-tos. A través deluso prudente de disposiciones binarias paraformar códigos binarios, los grupos de bits seutilizan para elaborar conjuntos de instruc-ciones completos que se encarguen de efec-tuar cálculos con diversos tipos de datos.
Los circuitos digitales son componentes dehardware que manipulan información bina-ria. Los circuitos se constituyen con parteselectrónicas -transistores, diodos y resistores-.Cada circuito recibe el nombre de compuerta.El diseñador de un sistema digital no tieneque ocuparse de la construcción interna delas compuertas individuales, sino sólo de suspropiedades lógicas externas. Cada com-puerta realiza una operación lógica especifi-ca, y la salida de una compuerta se aplica alas entradas de otras compuertas, en secuen-cia, para formar el circuito digital requerido.
A fin de describir las propiedades opera-cionales de los circuitos digitales, es nece-sario presentar una notación matemática queespecifique la operación de cada compuerta.Este sistema matemático es un sistema lógicobinario que se conoce como álgebrabooleana, en honor del matemático inglésGeorge Boole que, en 1854, publicó un librodonde presentaba la teoría matemática de lalógica. Hoy en día, el álgebra booleana se uti-liza para describir la interconexión de com-puertas digitales y para transformar diagra-mas de circuitos en expresiones algebraicas.
La lógica binaria tiene que ver con variablesque asumen dos valores discretos y con
26
ANALÓGICO DIGITAL BINARIO
MANDO
A un digito binario se loconoce como bit.

operaciones que asumen un significado lógi-co. A los dos valores que toman las variablesse les puede dar nombres diferentes; pero,para nuestros fines, conviene pensar en tér-minos de valores binarios, y asignar 1 y 0 acada variable.
La lógica binariase parece a la arit-mética binaria; lasoperaciones ANDy OR, por suparte, tienen si-militudes con lamultiplicación yla adición o suma,respectivamente.De hecho, lossímbolos que seutilizan para ANDy OR son los mismos que se emplean para lamultiplicación y la adición.
Consideremos las funciones lógicas de base:
• Célula "O".
• Célula "Y".
CÉLULA "O". Cuando una señal de presiónestá presente en uno de los orificios de ingre-so (a o b), el émbolo 1 se desplaza, permi-tiendo que el fluido salga libremente por elorificio de utilización S.
Cuando sobre el interior de la válvula actúan,simultáneamente, las señales a y b con dife-rente presión, la salida S tiene el nivel corres-pondiente a la mayor de las presiones.
Como vemos, la señal de utilización S se
produce cuando está presente una u otraseñal de entrada; por lo tanto, se realiza lafunción:
a + b = S
La suma lógica de dos o más variablesequivale a la realización eléctrica en paralelo.
Los posibles valores binarios de la operación"O" u "OR" lógica son los siguientes:
0 + 0 = 0
0 + 1 = 1
1 + 0 = 1
1 + 1 = 1
Estas operaciones se asemejan a la sumabinaria -excepto en la última operación-. Enla lógica binaria se tiene 1 + 1 = 1 (que se lee"uno o uno es igual a uno"); pero, en la arit-mética binaria se tiene 1 + 1 = 10 (que se lee"uno mas uno es igual a dos").
Para evitar ambigüedad, a veces se emplea elsímbolo V para denotar la operación OR enreemplazo del signo +; pero, en tanto no semezclen las operaciones aritméticas y lógicas,cada una puede utilizar el signo + con su sig-nificado independiente.
En la figura vemos cinco esquemas de repre-sentación de la célula lógica "O":
27
Sin embargo, la lógicabinaria no debe con-fundirse con la aritméti-ca binaria. Se debecomprender que unavariable aritmética de-signa un número quepuede constar de mu-chos dígitos; una varia-ble lógica, en cambio,es siempre un 1 ó un 0.
Esta tabla es una forma de esquematizarlas diferentes operaciones de una válvulao sistema, y representa la lógica de Boole;constituye un proceso directo para obte-ner las funciones de los operadores elec-trónicos, por ejemplo.
28
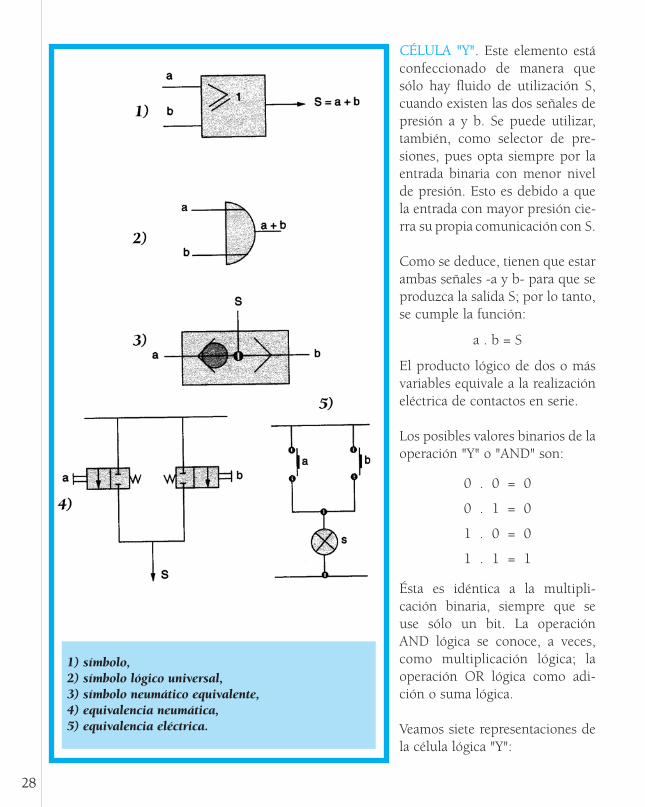
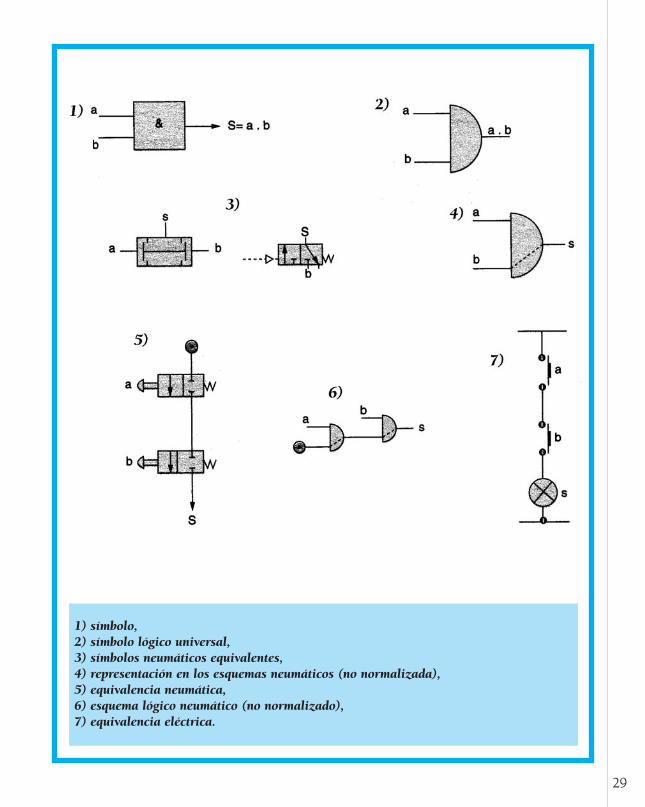
CÉLULA "Y". Este elemento estáconfeccionado de manera quesólo hay fluido de utilización S,cuando existen las dos señales depresión a y b. Se puede utilizar,también, como selector de pre-siones, pues opta siempre por laentrada binaria con menor nivelde presión. Esto es debido a quela entrada con mayor presión cie-rra su propia comunicación con S.
Como se deduce, tienen que estarambas señales -a y b- para que seproduzca la salida S; por lo tanto,se cumple la función:
a . b = S
El producto lógico de dos o másvariables equivale a la realizacióneléctrica de contactos en serie.
Los posibles valores binarios de laoperación "Y" o "AND" son:
0 . 0 = 0
0 . 1 = 0
1 . 0 = 0
1 . 1 = 1
Ésta es idéntica a la multipli-cación binaria, siempre que seuse sólo un bit. La operaciónAND lógica se conoce, a veces,como multiplicación lógica; laoperación OR lógica como adi-ción o suma lógica.
Veamos siete representaciones dela célula lógica "Y":
1) símbolo,2) símbolo lógico universal,3) símbolo neumático equivalente, 4) equivalencia neumática,5) equivalencia eléctrica.
29
1) símbolo,2) símbolo lógico universal,3) símbolos neumáticos equivalentes,4) representación en los esquemas neumáticos (no normalizada),5) equivalencia neumática,6) esquema lógico neumático (no normalizado),7) equivalencia eléctrica.
La señal binaria (señal de dos puntos) es unaseñal digital de un parámetro relacionado ados márgenes de valores. Este tipo de señalcontiene dos informaciones (por ejemplo: sí-activo, no-inactivo).
Para evitar yuxtaposiciones, es necesariotener un margen de seguridad entre los va-lores 0 y 1.
Por ejemplo:
Señal 0 (inactiva) = 0 a 5 volt.Señal 1 (activa) = 10 a 20 volt.Margen de seguridad = 5 volt.
Nos hemos estado refiriendo hasta aquí a losmandos. Centremos, ahora, nuestro análisisen los sensores que componen los elementosde entrada de este sistema de controlneumático que estamos analizando.
DETECTORES DE PROXIMIDAD SEGÚNEL PRINCIPIO REED. Este detector de proxi-midad está compuesto por un contacto reed
fundido en un bloque de resina sintética.Este contacto cierra cuando se acerca a uncampo magnético (por ejemplo, un campomagnético permanente en el émbolo de uncilindro) y emite una señal eléctrica. Lasconexiones eléctricas también están fundidasen el bloque de resina.
Un diodo luminoso indica el estado de con-mutación; en estado de excitación, se ilumi-na el diodo amarillo.
Los detectores de proximidad ofrecen múlti-ples ventajas; especialmente, en caso denumerosos procesos de conmutación, cuan-do el espacio es demasiado reducido para elmontaje de interruptores mecánicos o cuan-do las condiciones del medio ambiente así loexigen (polvo, arena, humedad).
Es recomendable no instalar cilindros condetectores de proximidad magnéticos en lascercanías de campos magnéticos fuertes(como los que son originados, por ejemplo,por máquinas de soldadura por resistencia).
30
Sensores
• Detectores de proximidadsegún el principio Reed.
• Detectores de proximidadinductivos.
• Detectores de proximidadcapacitivos.
• Detectores de proximidad ópti-cos.
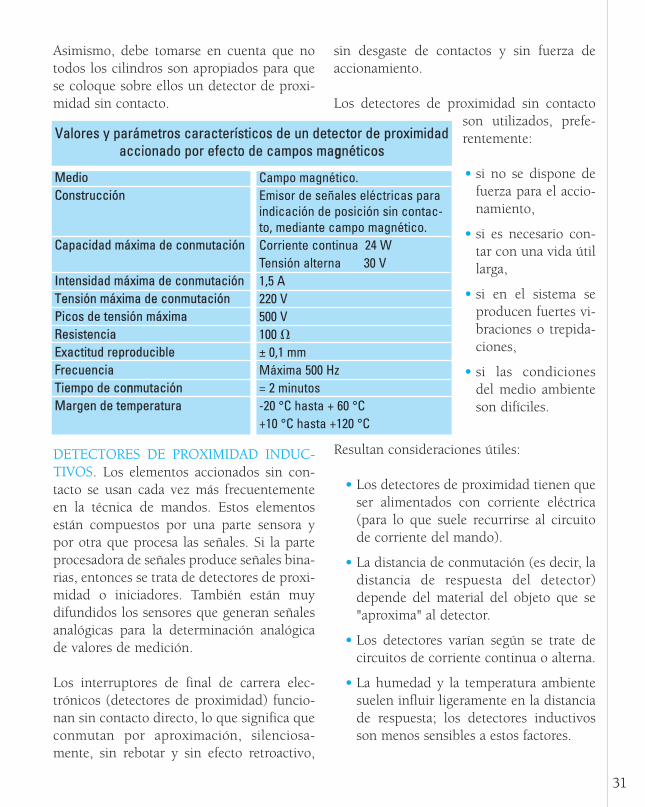
31
Asimismo, debe tomarse en cuenta que notodos los cilindros son apropiados para quese coloque sobre ellos un detector de proxi-midad sin contacto.
DETECTORES DE PROXIMIDAD INDUC-TIVOS. Los elementos accionados sin con-tacto se usan cada vez más frecuentementeen la técnica de mandos. Estos elementosestán compuestos por una parte sensora ypor otra que procesa las señales. Si la parteprocesadora de señales produce señales bina-rias, entonces se trata de detectores de proxi-midad o iniciadores. También están muydifundidos los sensores que generan señalesanalógicas para la determinación analógicade valores de medición.
Los interruptores de final de carrera elec-trónicos (detectores de proximidad) funcio-nan sin contacto directo, lo que significa queconmutan por aproximación, silenciosa-mente, sin rebotar y sin efecto retroactivo,
sin desgaste de contactos y sin fuerza deaccionamiento.
Los detectores de proximidad sin contactoson utilizados, prefe-rentemente:
• si no se dispone defuerza para el accio-namiento,
• si es necesario con-tar con una vida útillarga,
• si en el sistema seproducen fuertes vi-braciones o trepida-ciones,
• si las condicionesdel medio ambienteson difíciles.
Resultan consideraciones útiles:
• Los detectores de proximidad tienen queser alimentados con corriente eléctrica(para lo que suele recurrirse al circuitode corriente del mando).
• La distancia de conmutación (es decir, ladistancia de respuesta del detector)depende del material del objeto que se"aproxima" al detector.
• Los detectores varían según se trate decircuitos de corriente continua o alterna.
• La humedad y la temperatura ambientesuelen influir ligeramente en la distanciade respuesta; los detectores inductivosson menos sensibles a estos factores.
Valores y parámetros característicos de un detector de proximidadaccionado por efecto de campos maggnéticos
MedioConstrucción
Capacidad máxima de conmutación
Intensidad máxima de conmutaciónTensión máxima de conmutaciónPicos de tensión máximaResistenciaExactitud reproducibleFrecuenciaTiempo de connmutaciónMargen de temperatura
Campo magnético.Emisor de señales eléctricas paraindicación de posición sin contac-to, mediante campo magnético.Corriente continua 24 WTensión alterna 30 V1,5 A220 V500 V100 �
± 0,1 mmMáxima 500 Hz= 2 minutos-20 °C hasta + 60 °C+10 °C hasta +120 °C
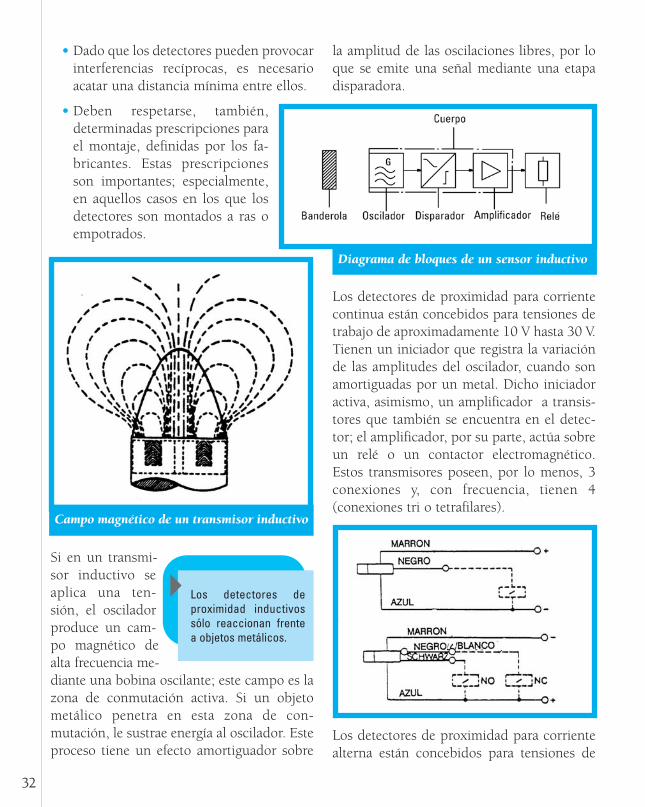
• Dado que los detectores pueden provocarinterferencias recíprocas, es necesarioacatar una distancia mínima entre ellos.
• Deben respetarse, también,determinadas prescripciones parael montaje, definidas por los fa-bricantes. Estas prescripcionesson importantes; especialmente,en aquellos casos en los que losdetectores son montados a ras oempotrados.
Si en un transmi-sor inductivo seaplica una ten-sión, el osciladorproduce un cam-po magnético dealta frecuencia me-diante una bobina oscilante; este campo es lazona de conmutación activa. Si un objetometálico penetra en esta zona de con-mutación, le sustrae energía al oscilador. Esteproceso tiene un efecto amortiguador sobre
la amplitud de las oscilaciones libres, por loque se emite una señal mediante una etapadisparadora.
Los detectores de proximidad para corrientecontinua están concebidos para tensiones detrabajo de aproximadamente 10 V hasta 30 V.Tienen un iniciador que registra la variaciónde las amplitudes del oscilador, cuando sonamortiguadas por un metal. Dicho iniciadoractiva, asimismo, un amplificador a transis-tores que también se encuentra en el detec-tor; el amplificador, por su parte, actúa sobreun relé o un contactor electromagnético.Estos transmisores poseen, por lo menos, 3conexiones y, con frecuencia, tienen 4(conexiones tri o tetrafilares).
Los detectores de proximidad para corrientealterna están concebidos para tensiones de
32
Campo magnético de un transmisor inductivo
Los detectores deproximidad inductivossólo reaccionan frentea objetos metálicos.
Diagrama de bloques de un sensor inductivo
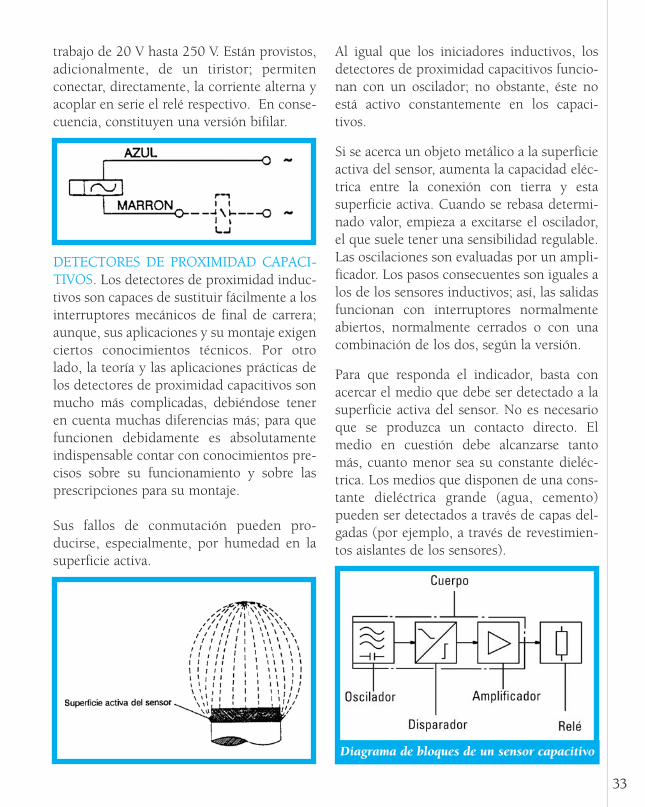
trabajo de 20 V hasta 250 V. Están provistos,adicionalmente, de un tiristor; permitenconectar, directamente, la corriente alterna yacoplar en serie el relé respectivo. En conse-cuencia, constituyen una versión bifilar.
DETECTORES DE PROXIMIDAD CAPACI-TIVOS. Los detectores de proximidad induc-tivos son capaces de sustituir fácilmente a losinterruptores mecánicos de final de carrera;aunque, sus aplicaciones y su montaje exigenciertos conocimientos técnicos. Por otrolado, la teoría y las aplicaciones prácticas delos detectores de proximidad capacitivos sonmucho más complicadas, debiéndose teneren cuenta muchas diferencias más; para quefuncionen debidamente es absolutamenteindispensable contar con conocimientos pre-cisos sobre su funcionamiento y sobre lasprescripciones para su montaje.
Sus fallos de conmutación pueden pro-ducirse, especialmente, por humedad en lasuperficie activa.
Al igual que los iniciadores inductivos, losdetectores de proximidad capacitivos funcio-nan con un oscilador; no obstante, éste noestá activo constantemente en los capaci-tivos.
Si se acerca un objeto metálico a la superficieactiva del sensor, aumenta la capacidad eléc-trica entre la conexión con tierra y estasuperficie activa. Cuando se rebasa determi-nado valor, empieza a excitarse el oscilador,el que suele tener una sensibilidad regulable.Las oscilaciones son evaluadas por un ampli-ficador. Los pasos consecuentes son iguales alos de los sensores inductivos; así, las salidasfuncionan con interruptores normalmenteabiertos, normalmente cerrados o con unacombinación de los dos, según la versión.
Para que responda el indicador, basta conacercar el medio que debe ser detectado a lasuperficie activa del sensor. No es necesarioque se produzca un contacto directo. Elmedio en cuestión debe alcanzarse tantomás, cuanto menor sea su constante dieléc-trica. Los medios que disponen de una cons-tante dieléctrica grande (agua, cemento)pueden ser detectados a través de capas del-gadas (por ejemplo, a través de revestimien-tos aislantes de los sensores).
33
Diagrama de bloques de un sensor capacitivo
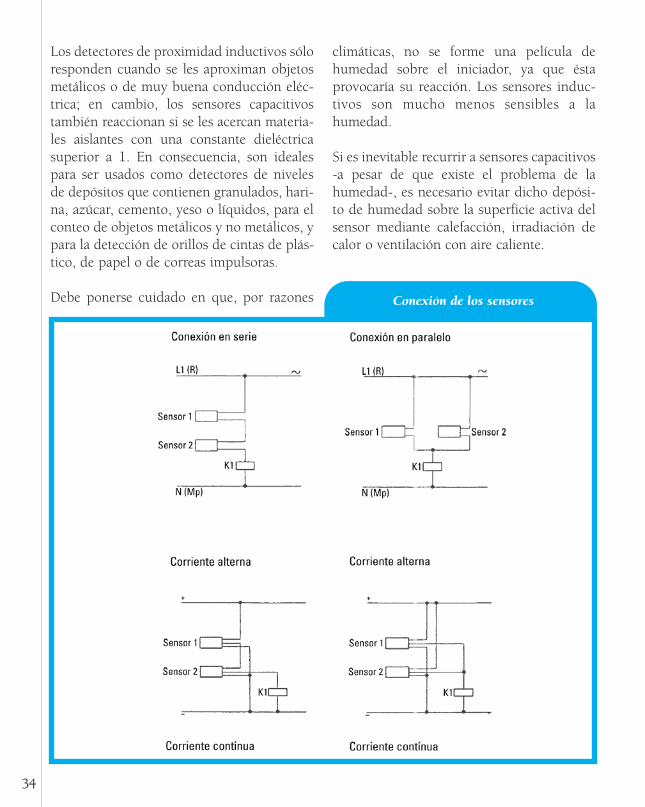
Los detectores de proximidad inductivos sóloresponden cuando se les aproximan objetosmetálicos o de muy buena conducción eléc-trica; en cambio, los sensores capacitivostambién reaccionan si se les acercan materia-les aislantes con una constante dieléctricasuperior a 1. En consecuencia, son idealespara ser usados como detectores de nivelesde depósitos que contienen granulados, hari-na, azúcar, cemento, yeso o líquidos, para elconteo de objetos metálicos y no metálicos, ypara la detección de orillos de cintas de plás-tico, de papel o de correas impulsoras.
Debe ponerse cuidado en que, por razones
climáticas, no se forme una película dehumedad sobre el iniciador, ya que éstaprovocaría su reacción. Los sensores induc-tivos son mucho menos sensibles a lahumedad.
Si es inevitable recurrir a sensores capacitivos-a pesar de que existe el problema de lahumedad-, es necesario evitar dicho depósi-to de humedad sobre la superficie activa delsensor mediante calefacción, irradiación decalor o ventilación con aire caliente.
34
Conexión de los sensores
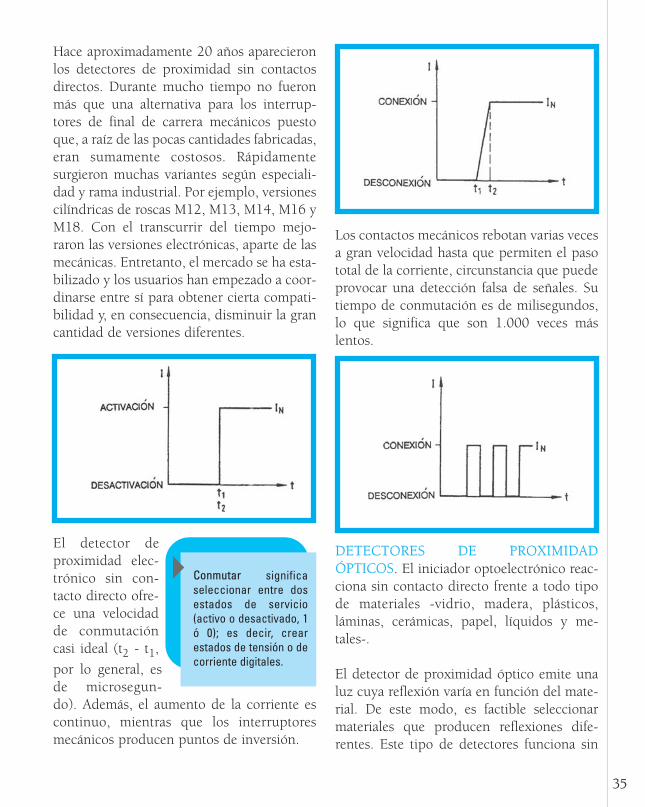
Hace aproximadamente 20 años aparecieronlos detectores de proximidad sin contactosdirectos. Durante mucho tiempo no fueronmás que una alternativa para los interrup-tores de final de carrera mecánicos puestoque, a raíz de las pocas cantidades fabricadas,eran sumamente costosos. Rápidamentesurgieron muchas variantes según especiali-dad y rama industrial. Por ejemplo, versionescilíndricas de roscas M12, M13, M14, M16 yM18. Con el transcurrir del tiempo mejo-raron las versiones electrónicas, aparte de lasmecánicas. Entretanto, el mercado se ha esta-bilizado y los usuarios han empezado a coor-dinarse entre sí para obtener cierta compati-bilidad y, en consecuencia, disminuir la grancantidad de versiones diferentes.
El detector deproximidad elec-trónico sin con-tacto directo ofre-ce una velocidadde conmutacióncasi ideal (t2 - t1,
por lo general, esde microsegun-do). Además, el aumento de la corriente escontinuo, mientras que los interruptoresmecánicos producen puntos de inversión.
Los contactos mecánicos rebotan varias vecesa gran velocidad hasta que permiten el pasototal de la corriente, circunstancia que puedeprovocar una detección falsa de señales. Sutiempo de conmutación es de milisegundos,lo que significa que son 1.000 veces máslentos.
DETECTORES DE PROXIMIDADÓPTICOS. El iniciador optoelectrónico reac-ciona sin contacto directo frente a todo tipode materiales -vidrio, madera, plásticos,láminas, cerámicas, papel, líquidos y me-tales-.
El detector de proximidad óptico emite unaluz cuya reflexión varía en función del mate-rial. De este modo, es factible seleccionarmateriales que producen reflexiones dife-rentes. Este tipo de detectores funciona sin
35
Conmutar significaseleccionar entre dosestados de servicio(activo o desactivado, 1ó 0); es decir, crearestados de tensión o decorriente digitales.
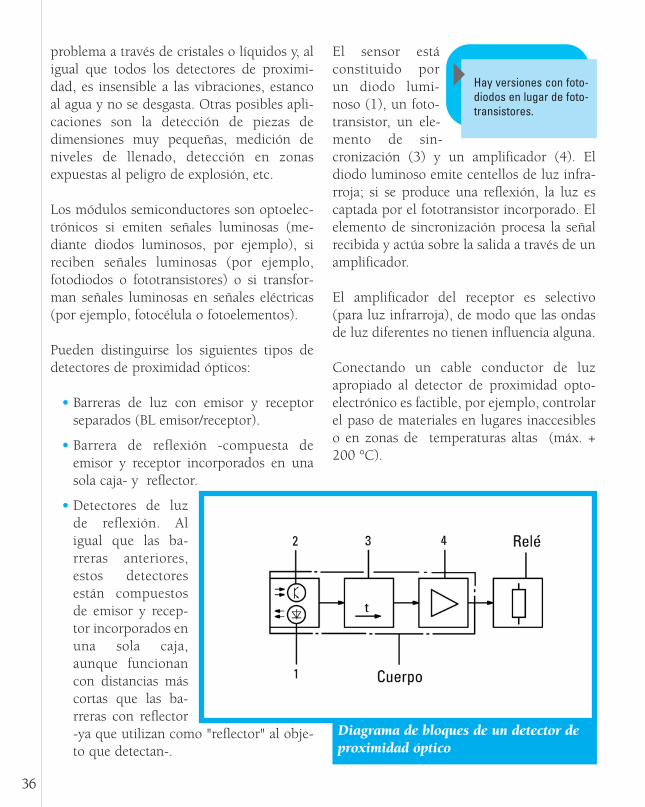
problema a través de cristales o líquidos y, aligual que todos los detectores de proximi-dad, es insensible a las vibraciones, estancoal agua y no se desgasta. Otras posibles apli-caciones son la detección de piezas dedimensiones muy pequeñas, medición deniveles de llenado, detección en zonasexpuestas al peligro de explosión, etc.
Los módulos semiconductores son optoelec-trónicos si emiten señales luminosas (me-diante diodos luminosos, por ejemplo), sireciben señales luminosas (por ejemplo,fotodiodos o fototransistores) o si transfor-man señales luminosas en señales eléctricas(por ejemplo, fotocélula o fotoelementos).
Pueden distinguirse los siguientes tipos dedetectores de proximidad ópticos:
• Barreras de luz con emisor y receptorseparados (BL emisor/receptor).
• Barrera de reflexión -compuesta deemisor y receptor incorporados en unasola caja- y reflector.
• Detectores de luzde reflexión. Aligual que las ba-rreras anteriores,estos detectoresestán compuestosde emisor y recep-tor incorporados enuna sola caja,aunque funcionancon distancias máscortas que las ba-rreras con reflector-ya que utilizan como "reflector" al obje-to que detectan-.
El sensor estáconstituido porun diodo lumi-noso (1), un foto-transistor, un ele-mento de sin-cronización (3) y un amplificador (4). Eldiodo luminoso emite centellos de luz infra-rroja; si se produce una reflexión, la luz escaptada por el fototransistor incorporado. Elelemento de sincronización procesa la señalrecibida y actúa sobre la salida a través de unamplificador.
El amplificador del receptor es selectivo(para luz infrarroja), de modo que las ondasde luz diferentes no tienen influencia alguna.
Conectando un cable conductor de luzapropiado al detector de proximidad opto-electrónico es factible, por ejemplo, controlarel paso de materiales en lugares inaccesibleso en zonas de temperaturas altas (máx. +200 °C).
36
Hay versiones con foto-diodos en lugar de foto-transistores.
Diagrama de bloques de un detector deproximidad óptico
3. Elementos de procesamiento(procesadores)
Las válvulas son unidades para controlar oregular el arranque, el paro, la dirección, lapresión y el paso del medio proveniente deuna bomba o de un acumulador.
El concepto de válvula es genérico y, en con-cordancia con su uso en el ámbito interna-cional, se aplica a todo tipo constructivo -válvulas de corredera, de bola, de plato, gri-fos, etc.-.
En las válvulas de vías, incide la dirección delflujo de aire; especialmente, en las funcionesde arranque, parada y paso.
Según la aplicación, es factible equipar a lasválvulas con los más diversos tipos deaccionamiento: palancas, rodillos, elec-troimán, aumento de presión, etc.
4. Elementos de maniobra y deaccionamiento (actuadores)
Los actuadores que permiten efectuar latransformación de la energía de presióntransmitida por el aire en energía mecánica -es decir, en trabajo- se denominan actua-dores neumáticos.
37
Después de considerar los distintostipos de sensores y sus particulari-
dades, optamos por incluir, en el cargador, unsensor óptico reflectivo de 150 mm de alcance,que nos permite utilizar distintos tipos de mate-riales en nuestro cargador, sin limitarnos amateriales ferrosos.
Vamos a detenernos en las válvulas devías, ya que éste es el tipo de válvula utilizadoen el cargador semiautomático.
Específicamente, en nuestro dispositivo uti-lizamos una válvula de 5/2 vías con doblepilotaje eléctrico -de ahí su denominación deválvula 5/2 vías electroneumática-.
La denominación de una válvula depende de lacantidad de las conexiones controladas y de lacantidad de posiciones. El primer digito de laespecificación indica la cantidad de vías -esdecir, la cantidad de conexiones controladas-,el segundo dígito indica la posición de la válvu-la. Para nuestro ejemplo, 5/2 vías equivale a 5conexiones controladas y 2 posiciones.
Para nuestro cargador, hemos adopta-do una válvula electroneumática; esto
implica que el tipo de accionamiento es pormedio de electroimán con un arrollamientoactivo, que produce la conmutación de posi-ciones cuando por el arrollamiento circulaenergía eléctrica.
Para este caso, es de doble accionamientoeléctrico; pero, puede haber diferentes com-binaciones de distintos accionamientos.
Los hidráulicos están presentes en la industriametalmecánica pesada; como, por ejemplo, enmáquinas inyectoras de plásticos, guillotinas,cizallas, dobladoras de caños, trenes de lami-nación, etc. Con este tipo de sistema se logramayor fuerza/potencia y no se requiere que elmedio de trabajo esté sometido a cuidadosespeciales de higiene.
Los eléctricos, por su parte, son utilizados en lasetapas de sensado y control de dispositivosneumáticos e hidráulicos, y están presentes encasi todos los dispositivos automáticos y semi-automáticos.
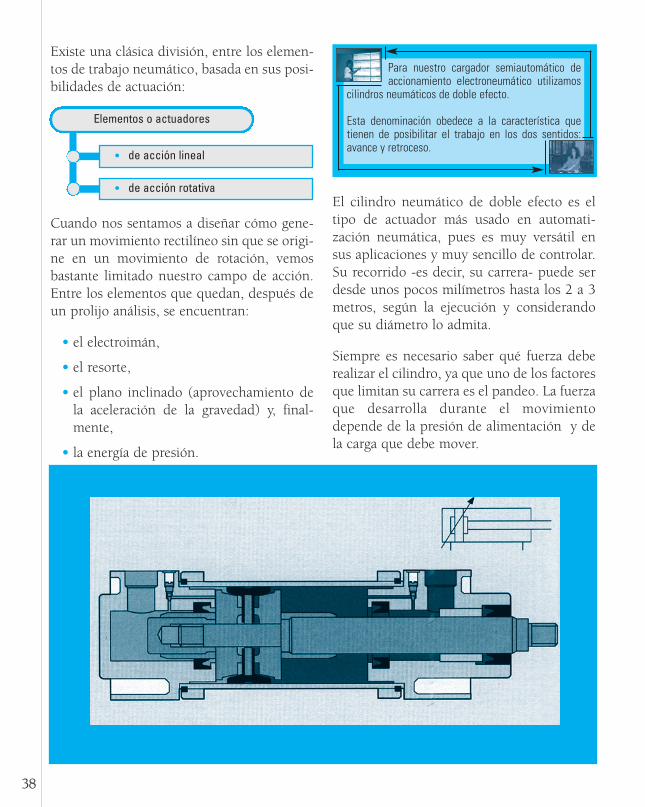
Existe una clásica división, entre los elemen-tos de trabajo neumático, basada en sus posi-bilidades de actuación:
Cuando nos sentamos a diseñar cómo gene-rar un movimiento rectilíneo sin que se origi-ne en un movimiento de rotación, vemosbastante limitado nuestro campo de acción.Entre los elementos que quedan, después deun prolijo análisis, se encuentran:
• el electroimán,
• el resorte,
• el plano inclinado (aprovechamiento dela aceleración de la gravedad) y, final-mente,
• la energía de presión.
El cilindro neumático de doble efecto es eltipo de actuador más usado en automati-zación neumática, pues es muy versátil ensus aplicaciones y muy sencillo de controlar.Su recorrido -es decir, su carrera- puede serdesde unos pocos milímetros hasta los 2 a 3metros, según la ejecución y considerandoque su diámetro lo admita.
Siempre es necesario saber qué fuerza deberealizar el cilindro, ya que uno de los factoresque limitan su carrera es el pandeo. La fuerzaque desarrolla durante el movimientodepende de la presión de alimentación y dela carga que debe mover.
38
Elementos o actuadores
• de acción lineal
• de acción rotativa
Para nuestro cargador semiautomático deaccionamiento electroneumático utilizamos
cilindros neumáticos de doble efecto.
Esta denominación obedece a la característica quetienen de posibilitar el trabajo en los dos sentidos:avance y retroceso.
39
AutomatizaciónEl concepto de automatización se viene estu-diando desde 1955. Desde entonces, se hanproducido varias definiciones -o demasiadoamplias o demasiado simples-; por esto,antes de entrar en la definición propiamentedicha de automatización, es convenienteconocer cómo se ha llegado a ella:
• El hombre ha trabajado -y aún hoy en díalo hace- de forma manual. En este proce-so manual, a través de un esfuerzo y conuna herramienta, hace un trabajo -porejemplo, el limado de un material con la
clásica lima plana-.
• A continuación, empieza a plantear cam-bios respecto del trabajo manual e intro-duce ciertas máquinas-herramientas (tra-bajo mecanizado); así, sustituye supotencia muscular para un trabajo dado,por una potencia proveniente de unafuerza exterior de energía, a la que go-bierna con un pequeño esfuerzo -estosucede, por ejemplo, en el torneado enun torno paralelo-.
• Posteriormente, desarrolla la automati-zación parcial, en la que el hombre pro-grama sobre una máquina el trabajo arealizar y ésta lo ejecuta -es lo que realiza,por ejemplo, un torno automático-.
• A continuación en el desarrollo tec-nológico, se procede a la automatizacióntotal; de allí los nombres de autómata,automatismo y, por fin, automatización.
Las variables fundamentales que inciden enla bondad de un automatismo son:
• productividad,
• dificultad,
Si analizamos los actuadores utilizados enel cargador, nos damos cuenta que cumplen
con su cometido:• su carrera es de 40 mm; de esta forma, es capaz
de atrapar y de contener el material en la rampa;
• su diámetro es de 12 mm; también podría haberfuncionado con un actuador de 10 mm dediámetro -pero, para nuestra decisión por éste,consideramos que es mejor pasar al modelocomercial siguiente y sobredimensionarlo unpoco-.
La palabra autómata proviene del griego y serefiere al aparato o instrumento que tiene dentrode él un mecanismo que realiza ciertosmovimientos.
La palabra automatismo significa la ejecuciónde diversos actos o movimientos sin la partici-pación de la voluntad.
Y automatización implica la sustitución del hom-bre -en trabajos que antes, parcial o totalmenterealizaba- por mecanismos que actúan sinpoder de decisión y según una planificaciónpreviamente programada.
1 La esbeltez � se obtiene mediante la expresión matemática:siendo lc luz de cálculo e i, el radio de giro de la sección.
lci
Una caracterización sencilla, pero eficaz, depandeo es: Deformación lateral que sufre unabarra solicitada a la compresión, cuya esbeltez� supera un valor determinado. Naturalmente,nuestra "barra" es un cilidro y como tal, no sólose extiende sino también presenta diferentesformas de sujeción o vinculación; si el pandeose acentúa, habrá que tener en cuenta que seirá deteriorando la camisa del cilindro.
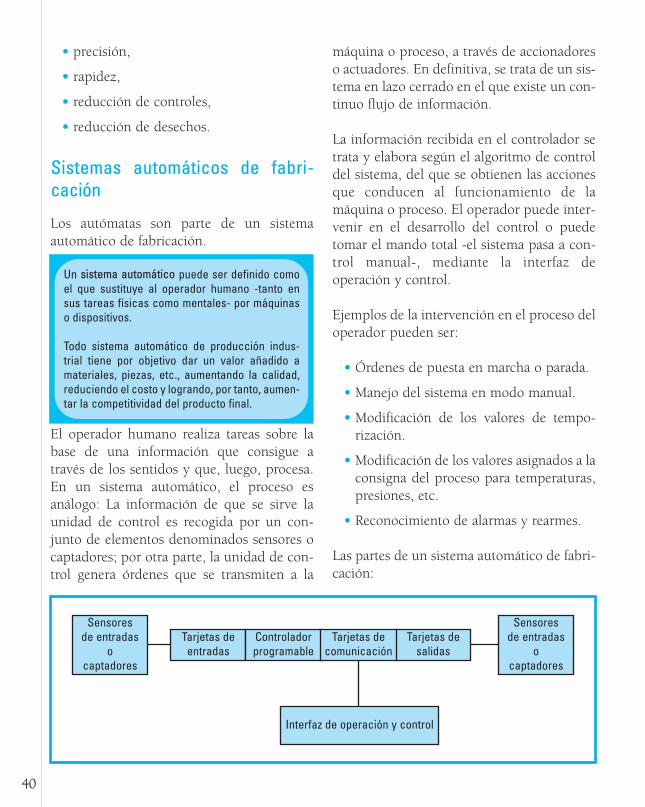
40
• precisión,
• rapidez,
• reducción de controles,
• reducción de desechos.
Sistemas automáticos de fabri-cación
Los autómatas son parte de un sistemaautomático de fabricación.
El operador humano realiza tareas sobre labase de una información que consigue através de los sentidos y que, luego, procesa.En un sistema automático, el proceso esanálogo: La información de que se sirve launidad de control es recogida por un con-junto de elementos denominados sensores ocaptadores; por otra parte, la unidad de con-trol genera órdenes que se transmiten a la
máquina o proceso, a través de accionadoreso actuadores. En definitiva, se trata de un sis-tema en lazo cerrado en el que existe un con-tinuo flujo de información.
La información recibida en el controlador setrata y elabora según el algoritmo de controldel sistema, del que se obtienen las accionesque conducen al funcionamiento de lamáquina o proceso. El operador puede inter-venir en el desarrollo del control o puedetomar el mando total -el sistema pasa a con-trol manual-, mediante la interfaz deoperación y control.
Ejemplos de la intervención en el proceso deloperador pueden ser:
• Órdenes de puesta en marcha o parada.
• Manejo del sistema en modo manual.
• Modificación de los valores de tempo-rización.
• Modificación de los valores asignados a laconsigna del proceso para temperaturas,presiones, etc.
• Reconocimiento de alarmas y rearmes.
Las partes de un sistema automático de fabri-cación:
Un sistema automático puede ser definido comoel que sustituye al operador humano -tanto ensus tareas físicas como mentales- por máquinaso dispositivos.
Todo sistema automático de producción indus-trial tiene por objetivo dar un valor añadido amateriales, piezas, etc., aumentando la calidad,reduciendo el costo y logrando, por tanto, aumen-tar la competitividad del producto final.
Sensoresde entradas
ocaptadores
Tarjetas deentradas
Controladorprogramable
Tarjetas desalidas
Sensoresde entradas
ocaptadores
Tarjetas decomunicación
Interfaz de operación y control
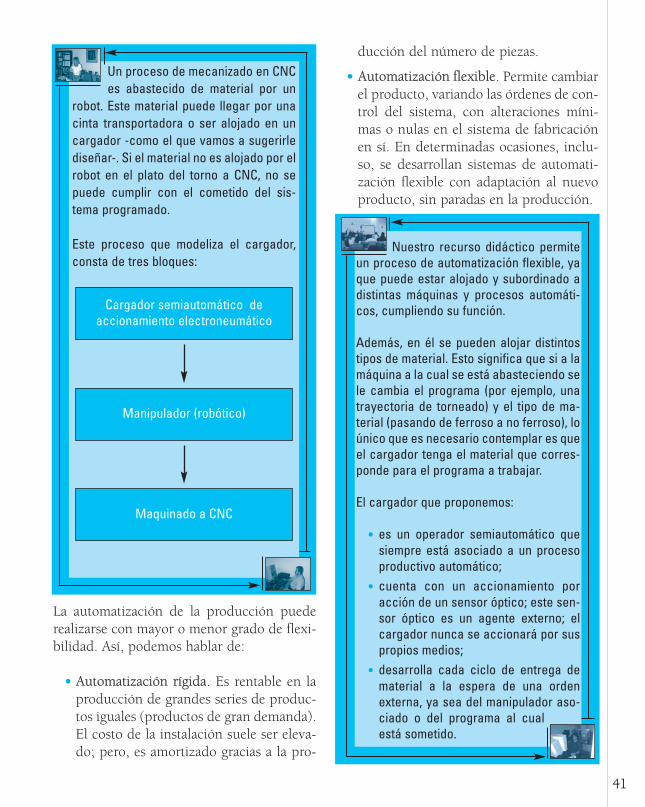
41
La automatización de la producción puederealizarse con mayor o menor grado de flexi-bilidad. Así, podemos hablar de:
• Automatización rígida. Es rentable en laproducción de grandes series de produc-tos iguales (productos de gran demanda).El costo de la instalación suele ser eleva-do; pero, es amortizado gracias a la pro-
ducción del número de piezas.
• Automatización flexible. Permite cambiarel producto, variando las órdenes de con-trol del sistema, con alteraciones míni-mas o nulas en el sistema de fabricaciónen sí. En determinadas ocasiones, inclu-so, se desarrollan sistemas de automati-zación flexible con adaptación al nuevoproducto, sin paradas en la producción.
Un proceso de mecanizado en CNCes abastecido de material por un
robot. Este material puede llegar por unacinta transportadora o ser alojado en uncargador -como el que vamos a sugerirlediseñar-. Si el material no es alojado por elrobot en el plato del torno a CNC, no sepuede cumplir con el cometido del sis-tema programado.
Este proceso que modeliza el cargador,consta de tres bloques:
Cargador semiautomático deaccionamiento electroneumático
Manipulador (robótico)
Maquinado a CNC
Nuestro recurso didáctico permiteun proceso de automatización flexible, yaque puede estar alojado y subordinado adistintas máquinas y procesos automáti-cos, cumpliendo su función.
Además, en él se pueden alojar distintostipos de material. Esto significa que si a lamáquina a la cual se está abasteciendo sele cambia el programa (por ejemplo, unatrayectoria de torneado) y el tipo de ma-terial (pasando de ferroso a no ferroso), loúnico que es necesario contemplar es queel cargador tenga el material que corres-ponde para el programa a trabajar.
El cargador que proponemos:
• es un operador semiautomático quesiempre está asociado a un procesoproductivo automático;
• cuenta con un accionamiento poracción de un sensor óptico; este sen-sor óptico es un agente externo; elcargador nunca se accionará por suspropios medios;
• desarrolla cada ciclo de entrega dematerial a la espera de una ordenexterna, ya sea del manipulador aso-ciado o del programa al cualestá sometido.
Control numérico por com-putadoraEn el marco de las políticas mundiales demercados abiertos y de globalización, surgela necesidad de adecuar las industrias a fin deque puedan satisfacer los retos de productivi-dad. Una alternativa frente a esta exigencia esla reconversión de las industrias, intro-duciendo automatizaciones, absorbiendogradualmente la nueva tecnología en untiempo adecuado, y considerando los fac-tores de rendimiento de la inversión y lacapacidad de producción.
Uno de los componentes importantes dentrode estos procesos de automatización son lasmáquinas-herramientas de control numéricocomputarizado.
¿Cuándo emplear el CNC?
Normalmente, el tipo de control implicado enun CNC se ejerce a través de una computa-dora; la máquina está diseñada a fin de obe-decer las instrucciones de un programa dado.
El CNC se ejerce a través del siguiente proceso:
• Dibujo del procesamiento.
• Programación.
• Interfaz.
• Máquinas-herramientas CNC.
La interfaz vincula el programador (porejemplo, software de programación de opera-ciones) y la máquina de CNC; tambiénpuede tratarse de una cinta perforada y codi-ficada con la información del programa quees decodificada por la máquina que poseeuna lectora de la cinta. Este segundo caso yaestá reemplazado por los programadorescomputarizados dentro de los mismos con-troladores o bien asociados a computadoraspersonales.
La alternativa de usar CNC se decide en tér-minos de producción:
• Cuando se tienen altos volúmenes deproducción.
• Cuando la frecuencia de producción deun mismo artículo no es muy alta.
• Cuando el grado de complejidad de losartículos producidos es alto.
• Cuando se realizan cambios en un artícu-lo, a fin de darle actualidad o de brindaruna variedad de modelos.
• Cuando es necesario un alto grado deprecisión.
Hoy en día, en la industria metalmecánicaencontramos una variedad de máquinas aCNC, desde tornos, fresadoras, cizallas, pan-tógrafos, hasta los grandes centros de meca-nizado.
42
El cargador semiautomático para unamáquina a CNC de accionamiento elec-
troneumático es un facilitador de la máquina a lacual abastece, ya que genera una mayor repetitivi-dad del proceso, con un mínimo de error.
El recurso didáctico que proponemos esun fiel colaborador de las máquinas a CNC,
muchas de las cuales deben ser abastecidas dematerial para desarrollar el programa diseñado ycargado en los diferentes controladores.
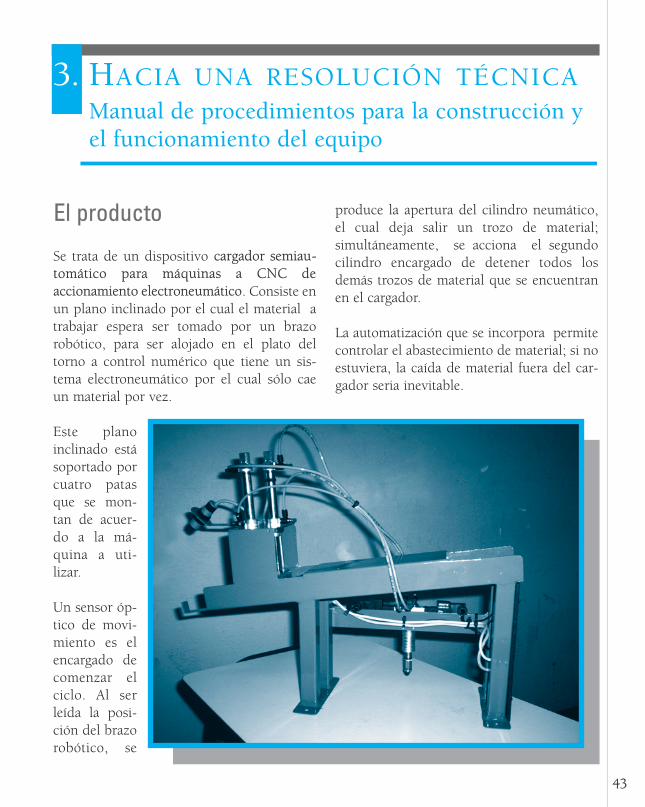
43
El producto
Se trata de un dispositivo cargador semiau-tomático para máquinas a CNC deaccionamiento electroneumático. Consiste enun plano inclinado por el cual el material atrabajar espera ser tomado por un brazorobótico, para ser alojado en el plato deltorno a control numérico que tiene un sis-tema electroneumático por el cual sólo caeun material por vez.
Este planoinclinado estásoportado porcuatro patasque se mon-tan de acuer-do a la má-quina a uti-lizar.
Un sensor óp-tico de movi-miento es elencargado decomenzar elciclo. Al serleída la posi-ción del brazorobótico, se
produce la apertura del cilindro neumático,el cual deja salir un trozo de material;simultáneamente, se acciona el segundocilindro encargado de detener todos losdemás trozos de material que se encuentranen el cargador.
La automatización que se incorpora permitecontrolar el abastecimiento de material; si noestuviera, la caída de material fuera del car-gador seria inevitable.
3. HACIA UNA RESOLUCIÓN TÉCNICAManual de procedimientos para la construcción yel funcionamiento del equipo
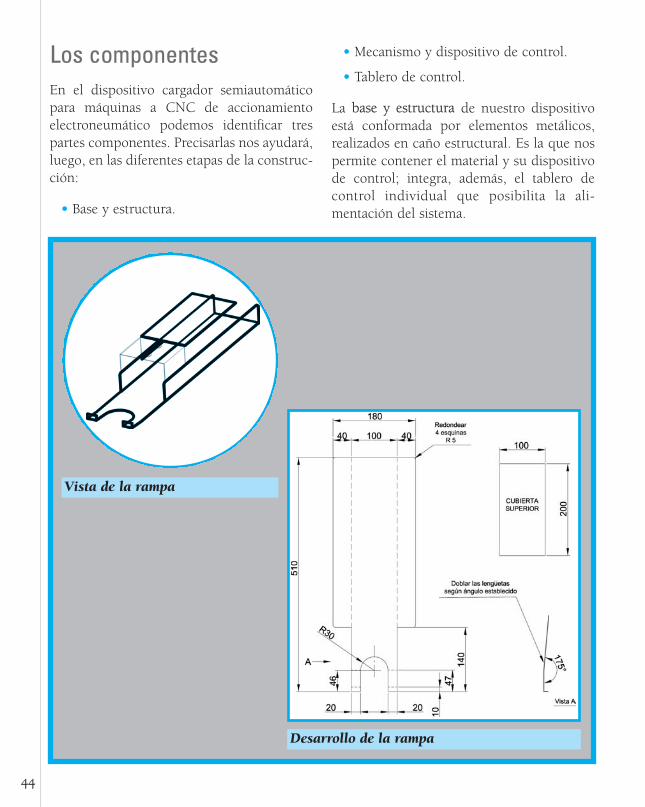
Los componentesEn el dispositivo cargador semiautomáticopara máquinas a CNC de accionamientoelectroneumático podemos identificar trespartes componentes. Precisarlas nos ayudará,luego, en las diferentes etapas de la construc-ción:
• Base y estructura.
• Mecanismo y dispositivo de control.
• Tablero de control.
La base y estructura de nuestro dispositivoestá conformada por elementos metálicos,realizados en caño estructural. Es la que nospermite contener el material y su dispositivode control; integra, además, el tablero decontrol individual que posibilita la ali-mentación del sistema.
44
Vista de la rampa
Desarrollo de la rampa
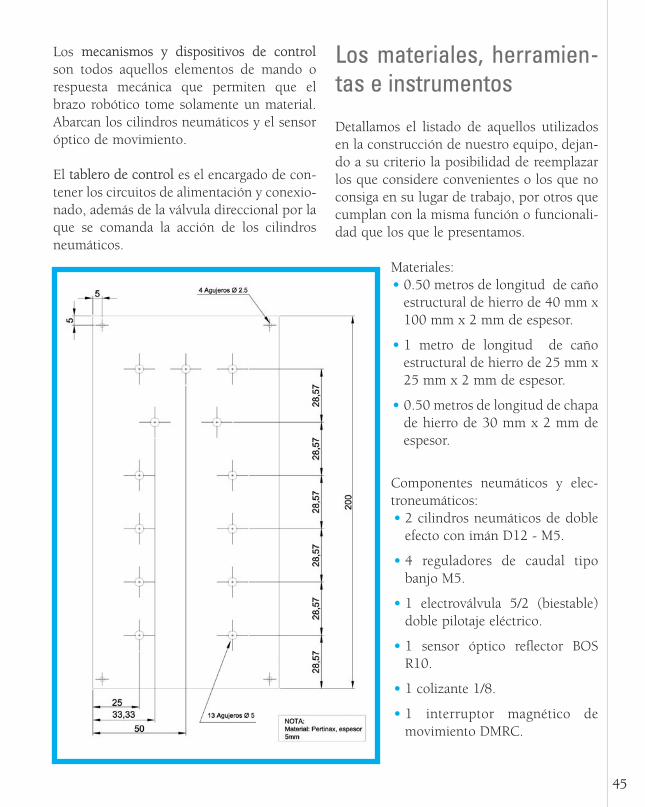
Los mecanismos y dispositivos de controlson todos aquellos elementos de mando orespuesta mecánica que permiten que elbrazo robótico tome solamente un material.Abarcan los cilindros neumáticos y el sensoróptico de movimiento.
El tablero de control es el encargado de con-tener los circuitos de alimentación y conexio-nado, además de la válvula direccional por laque se comanda la acción de los cilindrosneumáticos.
Los materiales, herramien-tas e instrumentos
Detallamos el listado de aquellos utilizadosen la construcción de nuestro equipo, dejan-do a su criterio la posibilidad de reemplazarlos que considere convenientes o los que noconsiga en su lugar de trabajo, por otros quecumplan con la misma función o funcionali-dad que los que le presentamos.
Materiales:• 0.50 metros de longitud de caño
estructural de hierro de 40 mm x100 mm x 2 mm de espesor.
• 1 metro de longitud de cañoestructural de hierro de 25 mm x25 mm x 2 mm de espesor.
• 0.50 metros de longitud de chapade hierro de 30 mm x 2 mm deespesor.
Componentes neumáticos y elec-troneumáticos:• 2 cilindros neumáticos de doble
efecto con imán D12 - M5.
• 4 reguladores de caudal tipobanjo M5.
• 1 electroválvula 5/2 (biestable)doble pilotaje eléctrico.
• 1 sensor óptico reflector BOSR10.
• 1 colizante 1/8.
• 1 interruptor magnético demovimiento DMRC.
45
46
• 2 racor orientable en T para tubo de 4mm - 1/8.
• 1 racor recto para tubo de 4 mm - 1/8.
• 1 racor orientable en L para tubo de 4mm - 1/8
Materiales eléctricos:• 3 metros de cable unipolar de 0.50 mm²
de sección.
• 10 fichas bananas.
• 10 conectores hembra banana.
Herramientas:• Punta de trazar.
• Punto de marcar.
• Martillo.
• Arco portasierra.
• Escuadra con sombrero.
• Soldadora eléctrica.
• Agujereadora de banco.
• Pinzas de fuerzas (universal).
• Alicate.
• Destornilladores planos.
• Destornilladores Philips.
• Llaves fijas.
• Llaves tubos.
• Morza.
• Limas planas de 6" grano medio.
• Compás de puntas secas.
• Mechas acero rápido (varias medidas).
• Amoladora de banco.
• Amoladora manual.
• Tijera corta chapa.
• Máquina fresadora universal.
Instrumentos:• Calibre pie de rey.
• Regla metálica.
• Cinta métrica.
La construcción
Vamos a dividir la construcción en tres etapasque, una vez cumplidas, van a permitir elarmado final de nuestro cargador semiau-tomático para máquinas a CNC deaccionamiento electroneumático. El orden enque usted y sus alumnos encaren estas etapasde construcción no tiene importancia; sinembargo, la secuencia que aquí disponemosha facilitado nuestra tarea de armado final.
• Etapa 1: Construcción de la base yestructura del cargador (plano inclina-do).
• Etapa 2: Montaje de los componentesneumáticos sobre el cargador.
• Etapa 3: Construcción, ensamblado ymontaje del tablero de mando.
Etapa 1: Construcción de la base yestructura del cargador (planoinclinado)
1.1. Trazado y corte de materiales
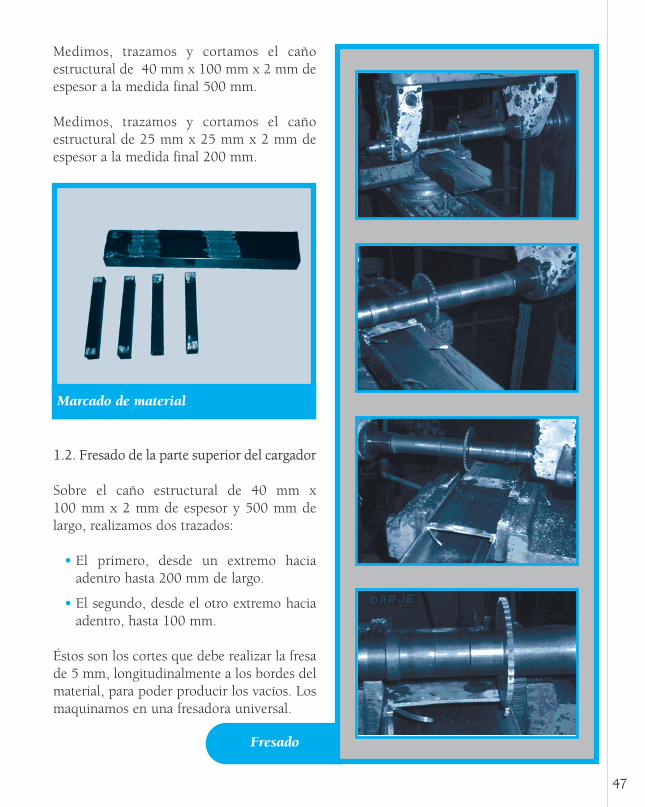
Medimos, trazamos y cortamos el cañoestructural de 40 mm x 100 mm x 2 mm deespesor a la medida final 500 mm.
Medimos, trazamos y cortamos el cañoestructural de 25 mm x 25 mm x 2 mm deespesor a la medida final 200 mm.
1.2. Fresado de la parte superior del cargador
Sobre el caño estructural de 40 mm x 100 mm x 2 mm de espesor y 500 mm delargo, realizamos dos trazados:
• El primero, desde un extremo haciaadentro hasta 200 mm de largo.
• El segundo, desde el otro extremo haciaadentro, hasta 100 mm.
Éstos son los cortes que debe realizar la fresade 5 mm, longitudinalmente a los bordes delmaterial, para poder producir los vacíos. Losmaquinamos en una fresadora universal.
47
Marcado de material
Fresado
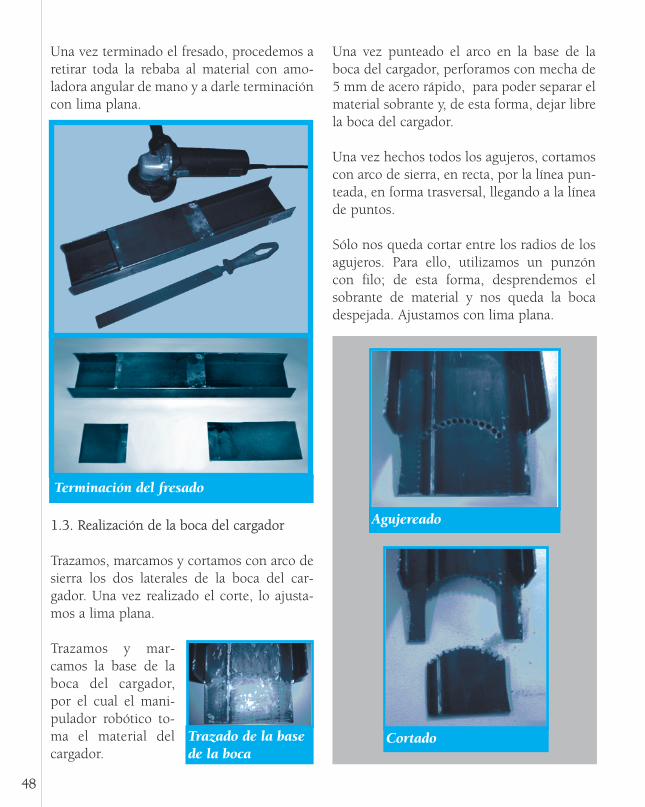
Una vez terminado el fresado, procedemos aretirar toda la rebaba al material con amo-ladora angular de mano y a darle terminacióncon lima plana.
1.3. Realización de la boca del cargador
Trazamos, marcamos y cortamos con arco desierra los dos laterales de la boca del car-gador. Una vez realizado el corte, lo ajusta-mos a lima plana.
Trazamos y mar-camos la base de laboca del cargador,por el cual el mani-pulador robótico to-ma el material delcargador.
Una vez punteado el arco en la base de laboca del cargador, perforamos con mecha de5 mm de acero rápido, para poder separar elmaterial sobrante y, de esta forma, dejar librela boca del cargador.
Una vez hechos todos los agujeros, cortamoscon arco de sierra, en recta, por la línea pun-teada, en forma trasversal, llegando a la líneade puntos.
Sólo nos queda cortar entre los radios de losagujeros. Para ello, utilizamos un punzóncon filo; de esta forma, desprendemos elsobrante de material y nos queda la bocadespejada. Ajustamos con lima plana.
48
Terminación del fresado
Trazado de la basede la boca
Agujereado
Cortado

1.4. Construcción del soporte del planoinclinado
Trazamos, marcamos y cortamos los cuatrosoportes del plano inclinado:
• Dos tienen la misma medida: 150 mm dealtura.
• Los otros dos: 170 mm de altura.
Una vez cortados los soportes, trazamos con
falsa escuadra el ángulo por el cual quedauno más alto que el otro y el plano inclinadoperfectamente apoyado sobre ellos.
De esta forma, procedemos a soldarlos en suposición: Los más altos, a 10 mm delextremo superior; y, los más bajos, a 190 mmdel extremo inferior.
Damos terminación a la soldadura con amo-ladora angular y lima plana.
49
Trazado y corte de los soportes Soldadura eléctrica
Soldadura eléctrica de los soportes Primera vista de la terminación

Etapa 2: Montaje de los compo-nentes neumáticos sobre el car-gador
2.1. Construcción del soporte de los cilin-dros neumáticos
Trazamos, marcamos y cortamos la chapasoporte de los cilindros neumáticos. Lachapa, de 2 mm de espesor, tiene 100 mmlargo x 70 mm de ancho.
Marcamos dos puntos para ser agujereadoscon distintas mechas de acero rápido, hastallegar a una medida definitiva de 16 mm dediámetro (ésta es la medida que el fabricanteda a la cabeza del cilindro). En estos orificiosse alojan los cilindros, que quedan sujetospor la tuerca M16 que traen de fábrica.
Trazamos, marcamos y cortamos las dos cha-pas de montaje de la chapa soporte sobre elcargador.
50
Trazado del alojamientode los cilindros
Agujereado con mecha de16 mm
Vista de los agujeros para los cilindros
Cilindros con tuercas de fijación
Otra vista de los cilindros

2.2. Construcción de los ángulos sopor-tes de material que serán accionados por loscilindros neumátticos y sus guías antigiro
Trazamos, marcamos y cortamos dos pedazosde hierro ángulo de 25 mm de ala x 70 mmde largo y 2 mm de espesor.
Trazamos y agujereamos los hierros ángulos.Buscamos sus centros en forma transversal yles realizamos un punto, para agujerear conmecha de 8 mm de acero rápido. Para uno delos ángulos, la distancia en forma longitudi-nal es de 10 mm de borde del ala perpendi-cular; para el otro, de 16 mm.
Sobre el eje de simetría longitudinal deambos, trazamos un punto de cada lado, a10 mm de distancia del borde perpendicular.Agujereamos con mecha de 5.5 mm paraacero rápido. Este trazado y este agujereadoson realizados para las guías antigiro, que sondos trozos de varilla redonda de 5 mm dediámetro por 110 mm de largo, por cadacilindro neumático.
Soldamos las dos varillas al hierro ángulo,con soldadura eléctrica.
Además, soldamos el soporte del sensor ópti-co.
51
Trazado, cortado yagujereado del hierroángulo
Trazado y cortado dela varilla antigiro
Soldado de la varilla antigiro
Vista del cilindro conlas varillas antigiroVista de los cilindros
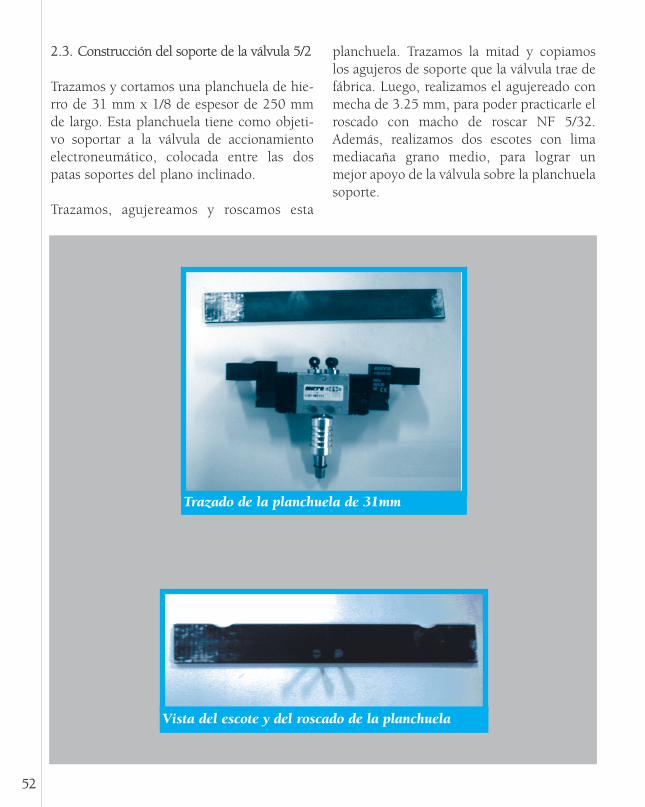
2.3. Construcción del soporte de la válvula 5/2
Trazamos y cortamos una planchuela de hie-rro de 31 mm x 1/8 de espesor de 250 mmde largo. Esta planchuela tiene como objeti-vo soportar a la válvula de accionamientoelectroneumático, colocada entre las dospatas soportes del plano inclinado.
Trazamos, agujereamos y roscamos esta
planchuela. Trazamos la mitad y copiamoslos agujeros de soporte que la válvula trae defábrica. Luego, realizamos el agujereado conmecha de 3.25 mm, para poder practicarle elroscado con macho de roscar NF 5/32.Además, realizamos dos escotes con limamediacaña grano medio, para lograr unmejor apoyo de la válvula sobre la planchuelasoporte.
52
Trazado de la planchuela de 31mm
Vista del escote y del roscado de la planchuela
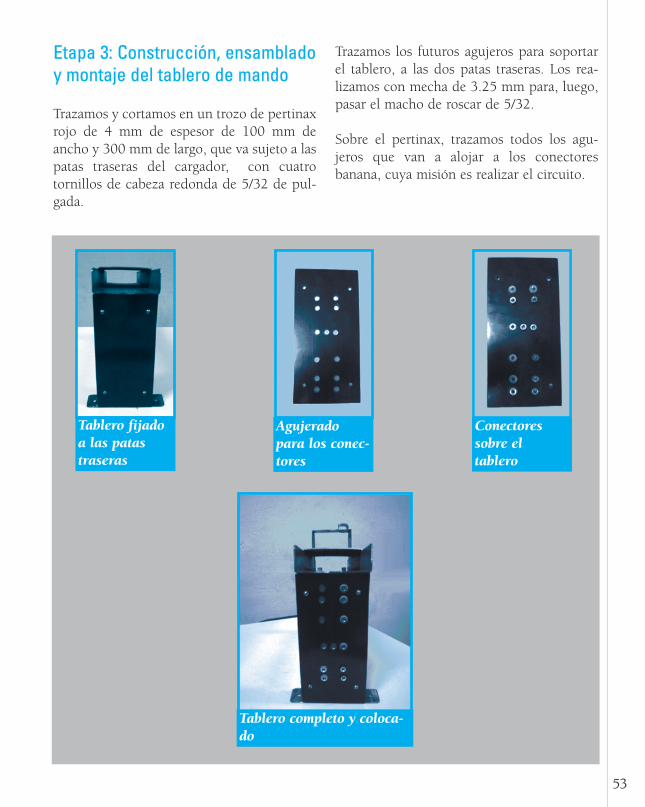
Etapa 3: Construcción, ensambladoy montaje del tablero de mando
Trazamos y cortamos en un trozo de pertinaxrojo de 4 mm de espesor de 100 mm deancho y 300 mm de largo, que va sujeto a laspatas traseras del cargador, con cuatrotornillos de cabeza redonda de 5/32 de pul-gada.
Trazamos los futuros agujeros para soportarel tablero, a las dos patas traseras. Los rea-lizamos con mecha de 3.25 mm para, luego,pasar el macho de roscar de 5/32.
Sobre el pertinax, trazamos todos los agu-jeros que van a alojar a los conectoresbanana, cuya misión es realizar el circuito.
53
Tablero fijadoa las patastraseras
Agujeradopara los conec-tores
Conectoressobre eltablero
Tablero completo y coloca-do
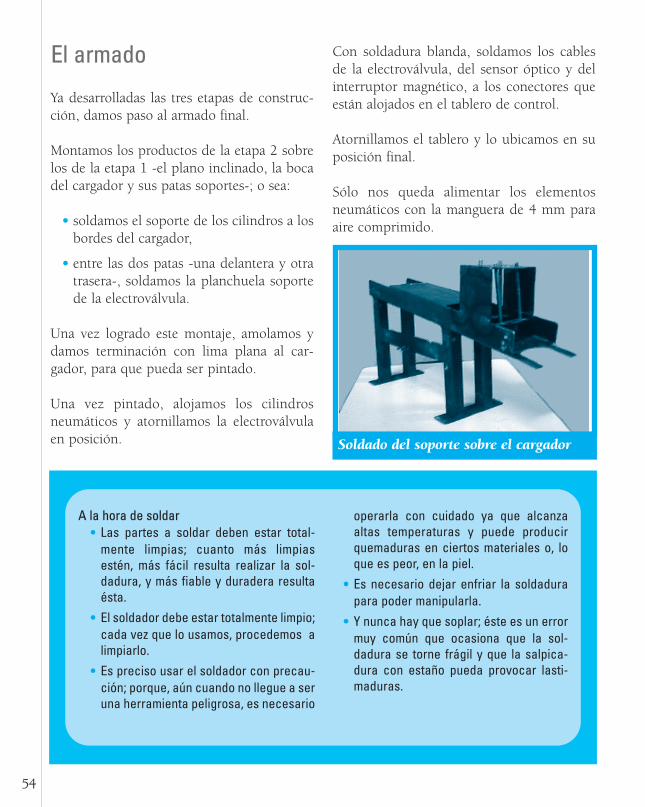
El armado
Ya desarrolladas las tres etapas de construc-ción, damos paso al armado final.
Montamos los productos de la etapa 2 sobrelos de la etapa 1 -el plano inclinado, la bocadel cargador y sus patas soportes-; o sea:
• soldamos el soporte de los cilindros a losbordes del cargador,
• entre las dos patas -una delantera y otratrasera-, soldamos la planchuela soportede la electroválvula.
Una vez logrado este montaje, amolamos ydamos terminación con lima plana al car-gador, para que pueda ser pintado.
Una vez pintado, alojamos los cilindrosneumáticos y atornillamos la electroválvulaen posición.
Con soldadura blanda, soldamos los cablesde la electroválvula, del sensor óptico y delinterruptor magnético, a los conectores queestán alojados en el tablero de control.
Atornillamos el tablero y lo ubicamos en suposición final.
Sólo nos queda alimentar los elementosneumáticos con la manguera de 4 mm paraaire comprimido.
54
A la hora de soldar• Las partes a soldar deben estar total-
mente limpias; cuanto más limpiasestén, más fácil resulta realizar la sol-dadura, y más fiable y duradera resultaésta.
• El soldador debe estar totalmente limpio;cada vez que lo usamos, procedemos alimpiarlo.
• Es preciso usar el soldador con precau-ción; porque, aún cuando no llegue a seruna herramienta peligrosa, es necesario
operarla con cuidado ya que alcanzaaltas temperaturas y puede producirquemaduras en ciertos materiales o, loque es peor, en la piel.
• Es necesario dejar enfriar la soldadurapara poder manipularla.
• Y nunca hay que soplar; éste es un errormuy común que ocasiona que la sol-dadura se torne frágil y que la salpica-dura con estaño pueda provocar lasti-maduras.
Soldado del soporte sobre el cargador
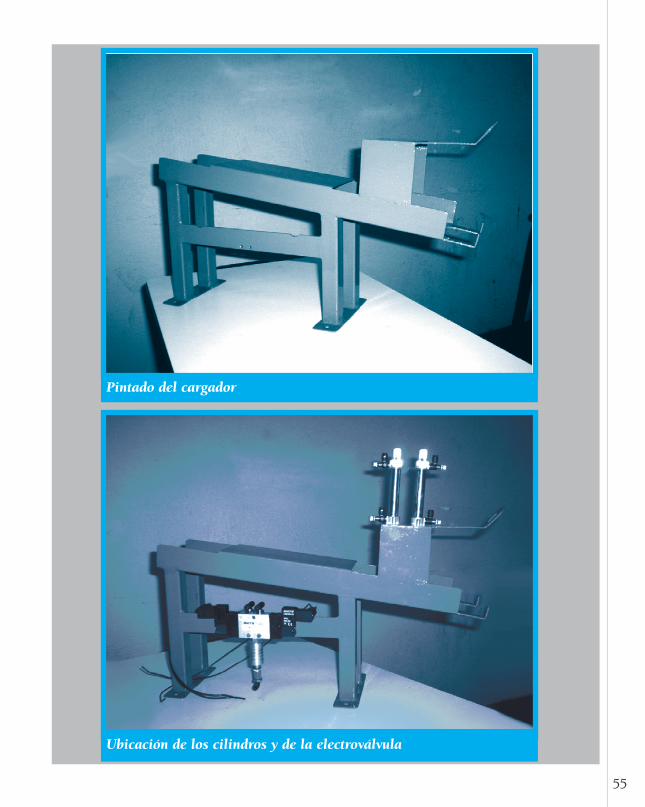
55
Pintado del cargador
Ubicación de los cilindros y de la electroválvula

56
Conexionado de los componentes
Atornillado del tablero
57
Alimentación de aire
El ensayo y el control
En el cargador semiautomático deaccionamiento electroneumático resultandecisivas tres variables:
• repetitividad de ciclo,
• optimización de tiempos de fabricación,
• disposición de distintos materiales sobreel cargador.
Resulta, entonces, necesario someterlo aensayos que permitan evaluar cada una deestas tres variables.
La superación de dificultadesConocemos algunos de los efectos fisiológi-cos del pasaje de la corriente eléctrica por elcuerpo humano y, alguna vez, hemos leídosobre algún accidente que produjo unamuerte por electrocución. Pero, nadie hasufrido daños por electrocución con una lin-terna o cambiando las pilas de la radio,aunque con ellos existe contacto directo; estoes porque funcionan con baja tensión. Por lotanto, para valores bajos de tensión no hayriesgo de daño fisiológico, aunque existacontacto directo con la fuente de tensión.
Por esto, nuestro cargador es accionadocon 24 volt de corriente continua, en laparte de mando. Ésta llega al tablero de con-trol transformada por un transformador220 V/24 V - 50 Hz.
Y la parte de trabajo es accionada por airecomprimido que llega de un compresor deaire.
58
Tensiones de entre 0 y 24 volt son las que,obligatoriamente, se usan en dispositivoseléctricos de uso público, como así tambiénen configuraciones de circuitos que se inte-gran a la actividad educativa, denominadosMBTS -muy baja tensión de seguridad-.
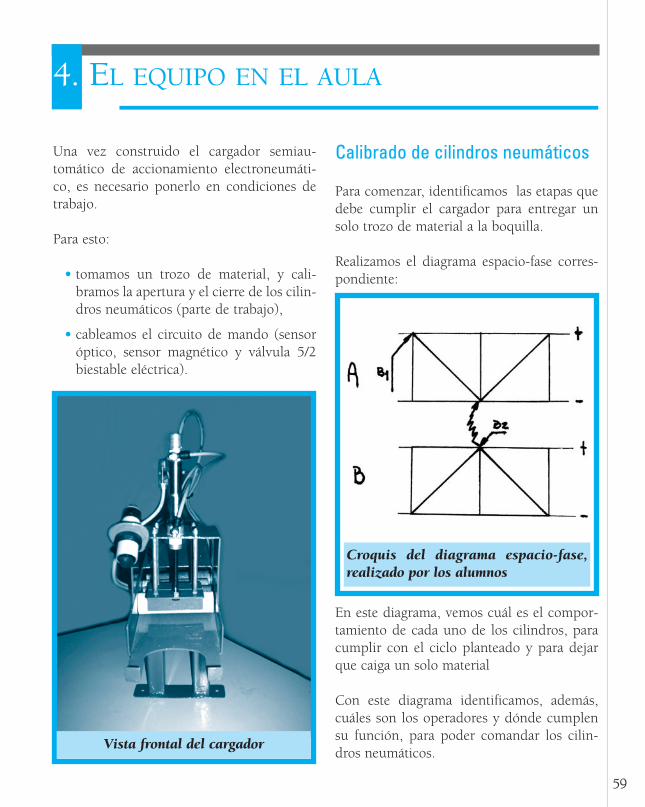
59
Una vez construido el cargador semiau-tomático de accionamiento electroneumáti-co, es necesario ponerlo en condiciones detrabajo.
Para esto:
• tomamos un trozo de material, y cali-bramos la apertura y el cierre de los cilin-dros neumáticos (parte de trabajo),
• cableamos el circuito de mando (sensoróptico, sensor magnético y válvula 5/2biestable eléctrica).
Calibrado de cilindros neumáticos
Para comenzar, identificamos las etapas quedebe cumplir el cargador para entregar unsolo trozo de material a la boquilla.
Realizamos el diagrama espacio-fase corres-pondiente:
En este diagrama, vemos cuál es el compor-tamiento de cada uno de los cilindros, paracumplir con el ciclo planteado y para dejarque caiga un solo material
Con este diagrama identificamos, además,cuáles son los operadores y dónde cumplensu función, para poder comandar los cilin-dros neumáticos.
4. EL EQUIPO EN EL AULA
Vista frontal del cargador
Croquis del diagrama espacio-fase,realizado por los alumnos
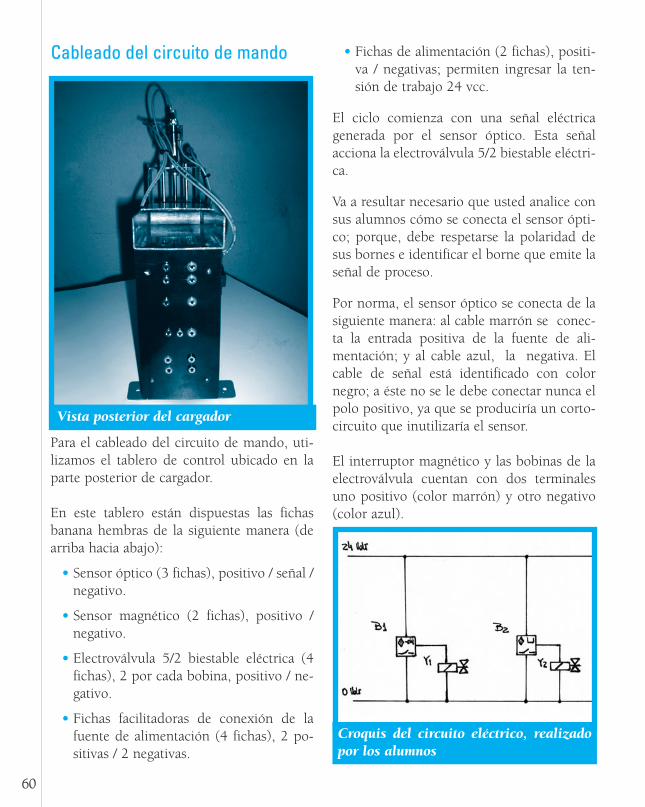
60
Cableado del circuito de mando
Para el cableado del circuito de mando, uti-lizamos el tablero de control ubicado en laparte posterior de cargador.
En este tablero están dispuestas las fichasbanana hembras de la siguiente manera (dearriba hacia abajo):
• Sensor óptico (3 fichas), positivo / señal /negativo.
• Sensor magnético (2 fichas), positivo /negativo.
• Electroválvula 5/2 biestable eléctrica (4fichas), 2 por cada bobina, positivo / ne-gativo.
• Fichas facilitadoras de conexión de lafuente de alimentación (4 fichas), 2 po-sitivas / 2 negativas.
• Fichas de alimentación (2 fichas), positi-va / negativas; permiten ingresar la ten-sión de trabajo 24 vcc.
El ciclo comienza con una señal eléctricagenerada por el sensor óptico. Esta señalacciona la electroválvula 5/2 biestable eléctri-ca.
Va a resultar necesario que usted analice consus alumnos cómo se conecta el sensor ópti-co; porque, debe respetarse la polaridad desus bornes e identificar el borne que emite laseñal de proceso.
Por norma, el sensor óptico se conecta de lasiguiente manera: al cable marrón se conec-ta la entrada positiva de la fuente de ali-mentación; y al cable azul, la negativa. Elcable de señal está identificado con colornegro; a éste no se le debe conectar nunca elpolo positivo, ya que se produciría un corto-circuito que inutilizaría el sensor.
El interruptor magnético y las bobinas de laelectroválvula cuentan con dos terminalesuno positivo (color marrón) y otro negativo(color azul).
Vista posterior del cargador
Croquis del circuito eléctrico, realizadopor los alumnos
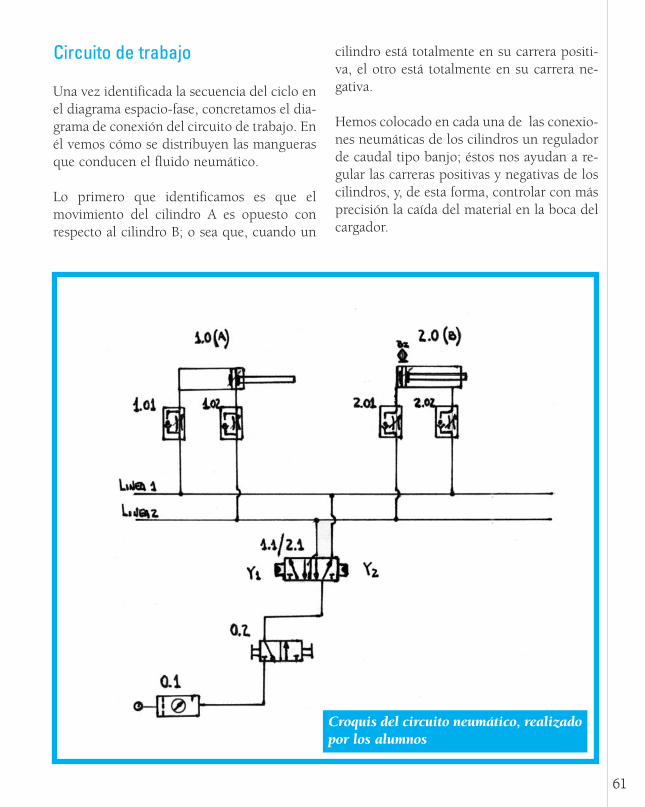
Circuito de trabajo
Una vez identificada la secuencia del ciclo enel diagrama espacio-fase, concretamos el dia-grama de conexión del circuito de trabajo. Enél vemos cómo se distribuyen las manguerasque conducen el fluido neumático.
Lo primero que identificamos es que elmovimiento del cilindro A es opuesto conrespecto al cilindro B; o sea que, cuando un
cilindro está totalmente en su carrera positi-va, el otro está totalmente en su carrera ne-gativa.
Hemos colocado en cada una de las conexio-nes neumáticas de los cilindros un reguladorde caudal tipo banjo; éstos nos ayudan a re-gular las carreras positivas y negativas de loscilindros, y, de esta forma, controlar con másprecisión la caída del material en la boca delcargador.
61
Croquis del circuito neumático, realizadopor los alumnos
62
Otras propuestas de actividades
Análisis de distintos tipos de cargadores uti-lizados en la industria metalmecánica:
• En la industria metalmecánica automáti-ca o semiautomática, ¿qué tipos de car-gadores de material podemos encontrar?
• ¿Cómo los clasificarían, basándose en eltipo de accionamiento, en los tiempos derespuestas, en la versatilidad, etc.?
• En los distintos tipos de cargadores,¿existen sensores? ¿Cuáles y de qué tipose utilizan? ¿Qué variables sensan? ¿Quétipo de magnitud física sensa cada uno?
• La información que reciben los sensores,¿qué tipo de señal constituye?
• ¿Qué obtenemos de la utilización de latecnología neumática y qué de la tec-nología hidráulica? Realicen una com-paración entre estas tecnologías y las dis-tintas utilidades en la industria.
PPropuesta de mejora del modelo propuesto:
• Una vez identificado el sistema de mandoadoptado, ¿consideran que se puedereemplazar por algún otro tipo deaccionamiento? ¿Cuál es? ¿A qué tipo detecnología responde?
• ¿Cambia de categoría; por ejemplo, desemiautomático a automático?
• ¿Se puede asociar a otro automatismo?
Cambios en los materiales de construccióndel cargaador:
En el equipo que presentamos, hemos pro-puesto un conjunto de materiales tantoestructurales como de fijación, anclajes,componentes eléctricos, neumáticos y elec-troneumáticos. Consideramos que sería degran utilidad abordar con los alumnos laposibilidad de emplear otros materiales quepuedan suplir a los que aquí sugerimos,encarando todos los aspectos que hacen aldiseño, desarrollo, construcción y fun-cionamiento, ya sea de un modelo didácticocomo de un cargador semiautomático detamaño real.
En nuestro prototipo de cargador semiau-tomático, hemos utilizado caños de hierroestructural estándar y componentes neumáti-cos de uso comercial; en la estructura que susalumnos diseñen, pueden integrar otros tiposde materiales que cumplan con la mismafinalidad y que estén dentro de las posibili-dades de cada escuela -por ejemplo, perfilesde aluminio, plásticos (grillon, nylon), plásti-cos termofundibles, etc.-.
Cambios en los materiales que el cargadorentrega:
Una vez que está puesto en marcha el car-gador semiautomático de accionamientoelectroneumático y vemos que cumple con elcometido de colocar en su boquilla un solotrozo de material para que un robot lo tomey lo coloque, por ejemplo, en un torno deCNC, podemos realizar otras experienciascon nuestros alumnos; por ejemplo, utilizardistintos trozos de materiales -además de
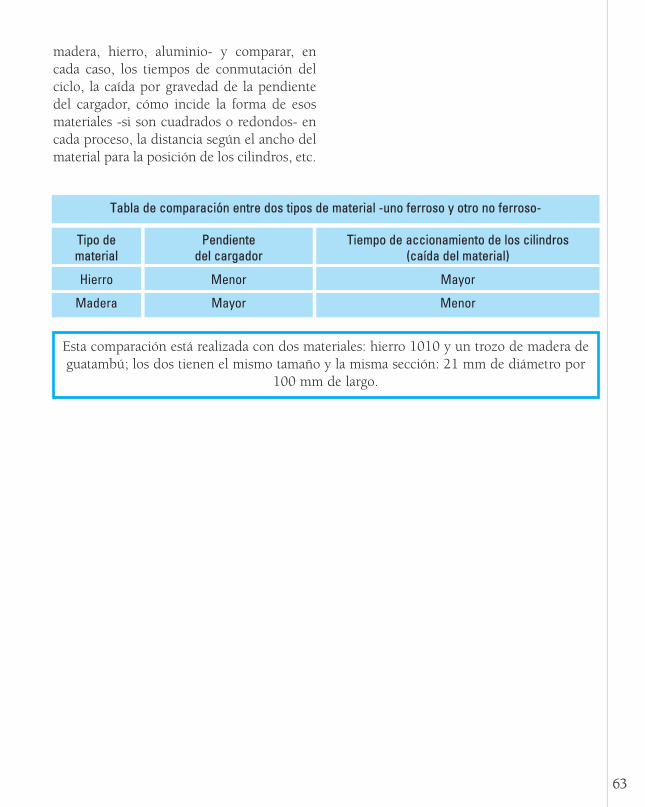
madera, hierro, aluminio- y comparar, encada caso, los tiempos de conmutación delciclo, la caída por gravedad de la pendientedel cargador, cómo incide la forma de esosmateriales -si son cuadrados o redondos- encada proceso, la distancia según el ancho delmaterial para la posición de los cilindros, etc.
63
Tabla de comparación entre dos tipos de material -uno ferroso y otro no ferroso-
Tipo dematerial
Hierro
Madera
Pendientedel cargador
Menor
Mayor
Tiempo de accionamiento de los cilindros(caída del material)
Mayor
Menor
Esta comparación está realizada con dos materiales: hierro 1010 y un trozo de madera deguatambú; los dos tienen el mismo tamaño y la misma sección: 21 mm de diámetro por
100 mm de largo.
64
Esta parte final de nuestro módulo de capa-citación contiene un cuadernillo para la eva-luación del recurso didáctico que le presen-tamos y, de las experiencias didácticas y con-tenidos propuestos a partir de él:
Esta evaluación tiene dos finalidades:
• Brindarle a usted, como docente que uti-liza este material, la oportunidad de do-cumentar el seguimiento de las activi-dades que realice con sus alumnos, a par-tir de nuestras propuestas y, en funciónde esta memoria de acciones, propiciaruna reflexión acerca de los cambios,mejoras o enriquecimiento de su propiatarea de enseñanza.
• Obtener de su parte, como usuario deeste material, información sobre todoslos aspectos en torno a los cuales gira lapropuesta.
Para este relevamiento de información, ustedencontrará, a continuación, una serie decuestionarios organizados básicamente entablas o matrices para completar. Con losdatos que usted exprese en ellos esperamostener una realimentación que nos permitamejorar todos los componentes de la serie depublicaciones “Recursos didácticos” yenriquecerla con propuestas o docu-mentación complementaria para aquellosdocentes que planteen iniciativas, interro-
gantes o dificultades específicas con relacióna la construcción del recurso didáctico, a lasactividades de aula, a los contenidos cientí-ficos y tecnológicos, a la metodología deenseñanza, a los procedimientos incluidos, ala información sobre materiales y a otrosaspectos.
Dada la importancia que esta información deretorno tiene para nuestro trabajo deseguimiento, mejora y actualización, leagradecemos que nos remita el cuadernillocon todas las observaciones, comentarios osugerencias adicionales que nos quiera hacerllegar. Para ello puede remitirnos una copia,a través de correo postal, a
Área de Monitoreo y Evaluación –CeNET–Oficina 112Saavedra 789. C1229ACE.Ciudad Autónoma de Buenos Aires.República Argentina.
O, si lo prefiere, solicitarnos el archivo elec-trónico de las páginas que siguen [email protected], enviándonos la versióndigitalizada de sus respuestas a través delmismo correo electrónico.
Desde ya, muchas gracias.
5. LA PUESTA EN PRÁCTICA
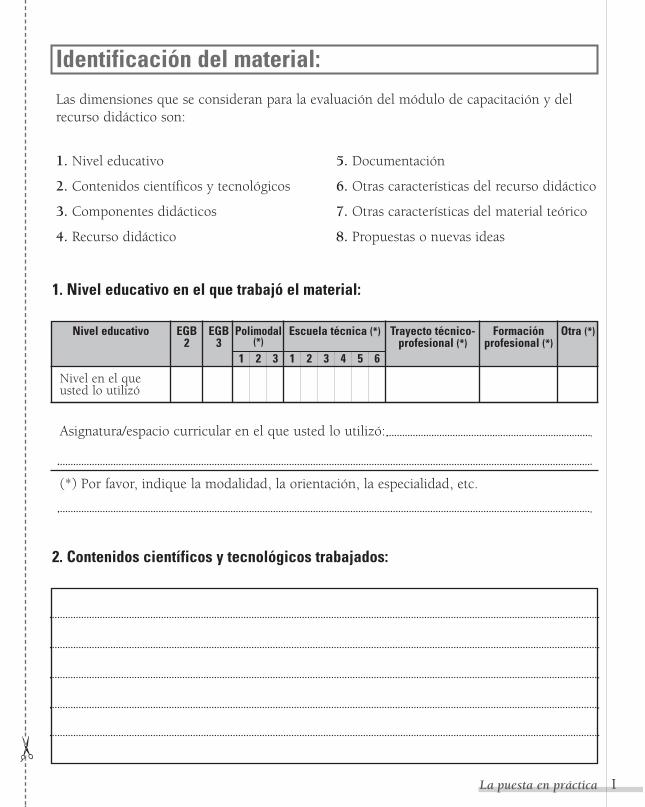
Identificación del material:
Las dimensiones que se consideran para la evaluación del módulo de capacitación y delrecurso didáctico son:
ILa puesta en práctica
1. Nivel educativo
2. Contenidos científicos y tecnológicos
3. Componentes didácticos
4. Recurso didáctico
5. Documentación
6. Otras características del recurso didáctico
7. Otras características del material teórico
8. Propuestas o nuevas ideas
(*) Por favor, indique la modalidad, la orientación, la especialidad, etc.
Escuela técnica (*)Nivel educativo EGB2
Polimodal(*)
Trayecto técnico-profesional (*)
Formaciónprofesional (*)
Otra (*)
1 2 3 1 62 3 4 5
EGB3
Nivel en el queusted lo utilizó
Asignatura/espacio curricular en el que usted lo utilizó:
2. Contenidos científicos y tecnológicos trabajados:
1. Nivel educativo en el que trabajó el material:
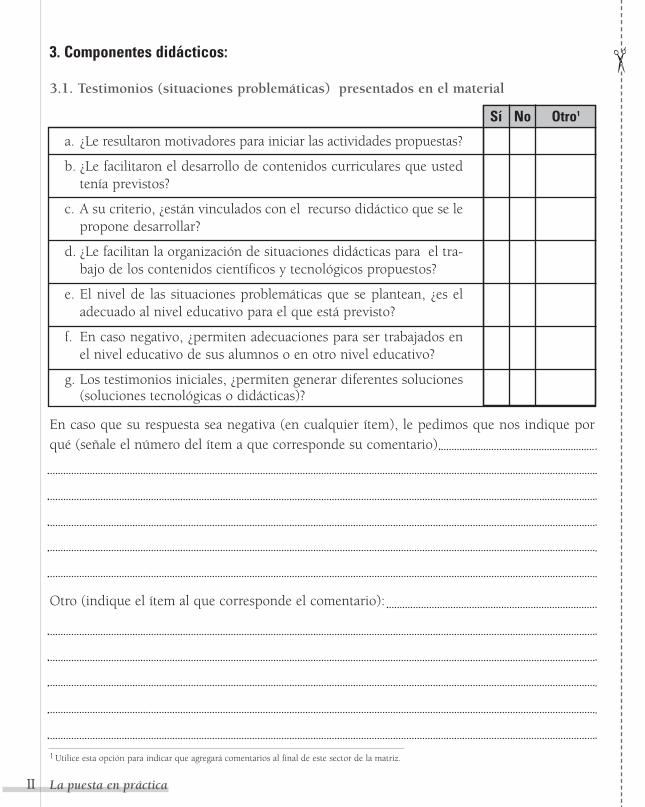
3. Componentes didácticos:
3.1. Testimonios (situaciones problemáticas) presentados en el material
a. ¿Le resultaron motivadores para iniciar las actividades propuestas?
b. ¿Le facilitaron el desarrollo de contenidos curriculares que ustedtenía previstos?
c. A su criterio, ¿están vinculados con el recurso didáctico que se lepropone desarrollar?
d. ¿Le facilitan la organización de situaciones didácticas para el tra-bajo de los contenidos científicos y tecnológicos propuestos?
e. El nivel de las situaciones problemáticas que se plantean, ¿es eladecuado al nivel educativo para el que está previsto?
f. En caso negativo, ¿permiten adecuaciones para ser trabajados enel nivel educativo de sus alumnos o en otro nivel educativo?
g. Los testimonios iniciales, ¿permiten generar diferentes soluciones(soluciones tecnológicas o didácticas)?
En caso que su respuesta sea negativa (en cualquier ítem), le pedimos que nos indique porqué (señale el número del ítem a que corresponde su comentario)
Otro (indique el ítem al que corresponde el comentario):
La puesta en prácticaII
Sí Otro1No
1 Utilice esta opción para indicar que agregará comentarios al final de este sector de la matriz.
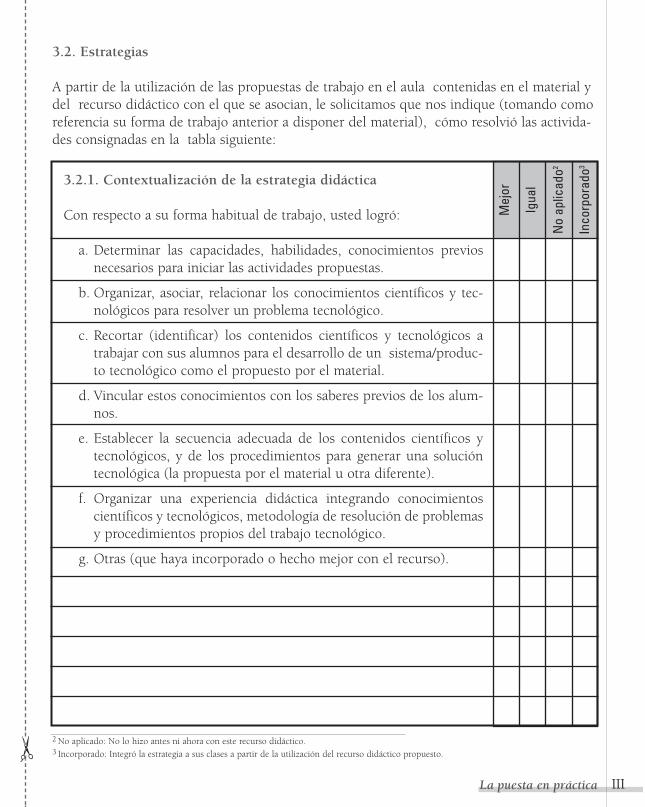
La puesta en práctica
3.2. Estrategias
A partir de la utilización de las propuestas de trabajo en el aula contenidas en el material ydel recurso didáctico con el que se asocian, le solicitamos que nos indique (tomando comoreferencia su forma de trabajo anterior a disponer del material), cómo resolvió las activida-des consignadas en la tabla siguiente:
III
Mej
or
Igua
l
No
aplic
ado2
Inco
rpor
ado3
3.2.1. Contextualización de la estrategia didáctica
Con respecto a su forma habitual de trabajo, usted logró:
a. Determinar las capacidades, habilidades, conocimientos previosnecesarios para iniciar las actividades propuestas.
b. Organizar, asociar, relacionar los conocimientos científicos y tec-nológicos para resolver un problema tecnológico.
c. Recortar (identificar) los contenidos científicos y tecnológicos atrabajar con sus alumnos para el desarrollo de un sistema/produc-to tecnológico como el propuesto por el material.
d. Vincular estos conocimientos con los saberes previos de los alum-nos.
e. Establecer la secuencia adecuada de los contenidos científicos ytecnológicos, y de los procedimientos para generar una solucióntecnológica (la propuesta por el material u otra diferente).
f. Organizar una experiencia didáctica integrando conocimientoscientíficos y tecnológicos, metodología de resolución de problemasy procedimientos propios del trabajo tecnológico.
g. Otras (que haya incorporado o hecho mejor con el recurso).
2 No aplicado: No lo hizo antes ni ahora con este recurso didáctico.3 Incorporado: Integró la estrategia a sus clases a partir de la utilización del recurso didáctico propuesto.
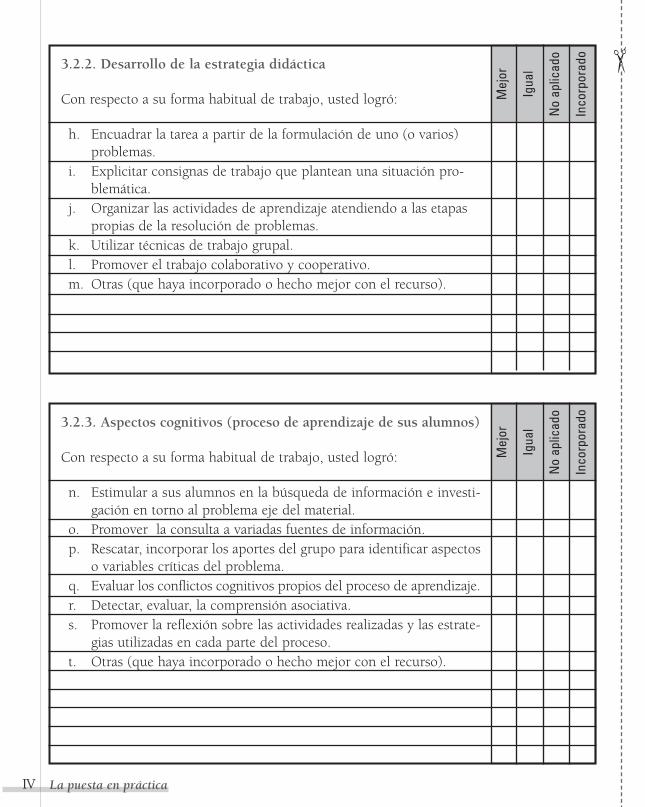
La puesta en prácticaIV
Mej
or
Igua
l
No
aplic
ado
Inco
rpor
ado
3.2.2. Desarrollo de la estrategia didáctica
Con respecto a su forma habitual de trabajo, usted logró:
h. Encuadrar la tarea a partir de la formulación de uno (o varios)problemas.
i. Explicitar consignas de trabajo que plantean una situación pro-blemática.
j. Organizar las actividades de aprendizaje atendiendo a las etapaspropias de la resolución de problemas.
k. Utilizar técnicas de trabajo grupal.l. Promover el trabajo colaborativo y cooperativo.m. Otras (que haya incorporado o hecho mejor con el recurso).
Mej
or
Igua
l
No
aplic
ado
Inco
rpor
ado
3.2.3. Aspectos cognitivos (proceso de aprendizaje de sus alumnos)
Con respecto a su forma habitual de trabajo, usted logró:
n. Estimular a sus alumnos en la búsqueda de información e investi-gación en torno al problema eje del material.
o. Promover la consulta a variadas fuentes de información.p. Rescatar, incorporar los aportes del grupo para identificar aspectos
o variables críticas del problema.q. Evaluar los conflictos cognitivos propios del proceso de aprendizaje.r. Detectar, evaluar, la comprensión asociativa.s. Promover la reflexión sobre las actividades realizadas y las estrate-
gias utilizadas en cada parte del proceso.t. Otras (que haya incorporado o hecho mejor con el recurso).
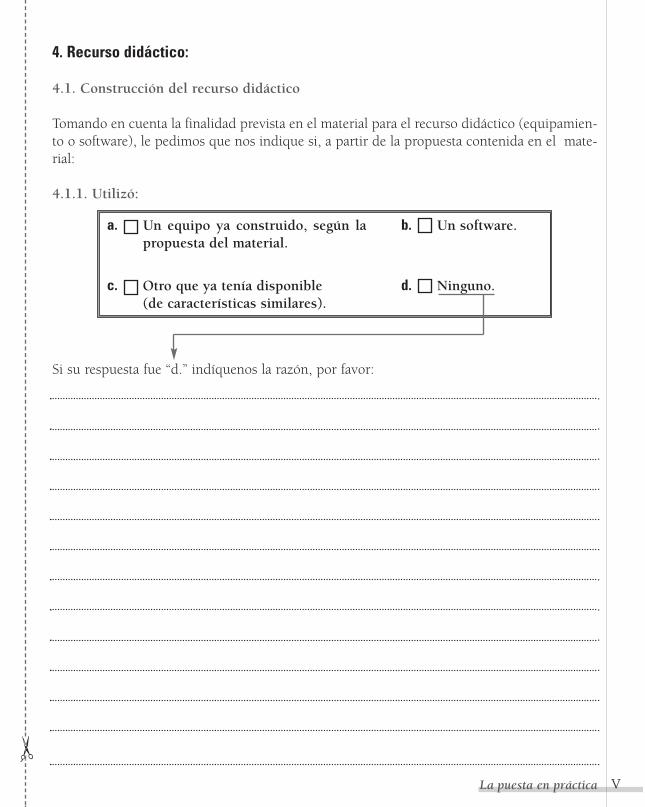
4. Recurso didáctico:
4.1. Construcción del recurso didáctico
Tomando en cuenta la finalidad prevista en el material para el recurso didáctico (equipamien-to o software), le pedimos que nos indique si, a partir de la propuesta contenida en el mate-rial:
4.1.1. Utilizó:
VLa puesta en práctica
a. Un equipo ya construido, según lapropuesta del material.
c. Otro que ya tenía disponible(de características similares).
b. Un software.
d. Ninguno.
Si su respuesta fue “d.” indíquenos la razón, por favor:
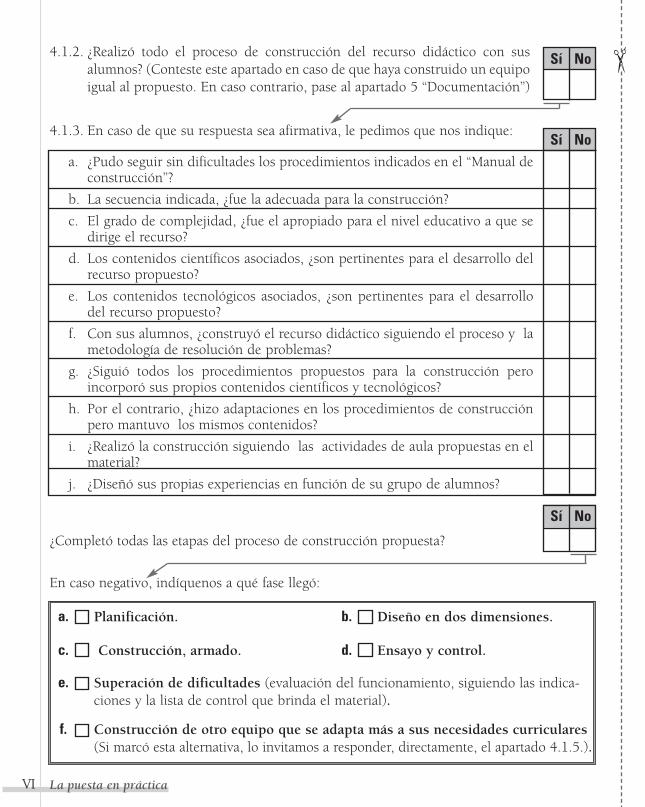
a. ¿Pudo seguir sin dificultades los procedimientos indicados en el “Manual deconstrucción”?
b. La secuencia indicada, ¿fue la adecuada para la construcción?
c. El grado de complejidad, ¿fue el apropiado para el nivel educativo a que sedirige el recurso?
d. Los contenidos científicos asociados, ¿son pertinentes para el desarrollo delrecurso propuesto?
e. Los contenidos tecnológicos asociados, ¿son pertinentes para el desarrollodel recurso propuesto?
f. Con sus alumnos, ¿construyó el recurso didáctico siguiendo el proceso y lametodología de resolución de problemas?
g. ¿Siguió todos los procedimientos propuestos para la construcción peroincorporó sus propios contenidos científicos y tecnológicos?
h. Por el contrario, ¿hizo adaptaciones en los procedimientos de construcciónpero mantuvo los mismos contenidos?
i. ¿Realizó la construcción siguiendo las actividades de aula propuestas en elmaterial?
j. ¿Diseñó sus propias experiencias en función de su grupo de alumnos?
¿Completó todas las etapas del proceso de construcción propuesta?
En caso negativo, indíquenos a qué fase llegó:
Sí No
La puesta en práctica
4.1.2. ¿Realizó todo el proceso de construcción del recurso didáctico con susalumnos? (Conteste este apartado en caso de que haya construido un equipoigual al propuesto. En caso contrario, pase al apartado 5 “Documentación”)
4.1.3. En caso de que su respuesta sea afirmativa, le pedimos que nos indique:
Sí No
Sí No
a. Planificación.
c. Construcción, armado.
b. Diseño en dos dimensiones.
d. Ensayo y control.
e. Superación de dificultades (evaluación del funcionamiento, siguiendo las indica-ciones y la lista de control que brinda el material).
f. Construcción de otro equipo que se adapta más a sus necesidades curriculares(Si marcó esta alternativa, lo invitamos a responder, directamente, el apartado 4.1.5.).
VI
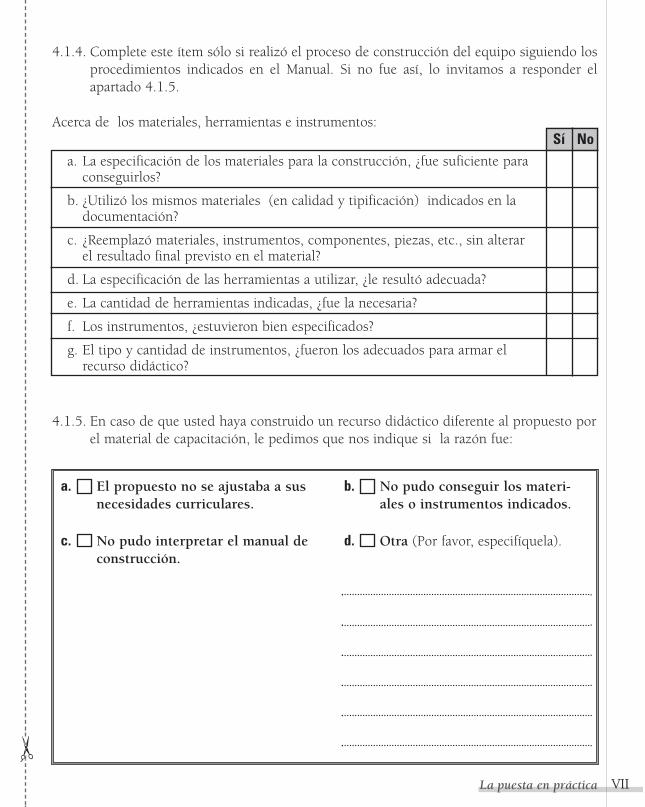
VIILa puesta en práctica
4.1.4. Complete este ítem sólo si realizó el proceso de construcción del equipo siguiendo losprocedimientos indicados en el Manual. Si no fue así, lo invitamos a responder elapartado 4.1.5.
Acerca de los materiales, herramientas e instrumentos:
a. La especificación de los materiales para la construcción, ¿fue suficiente paraconseguirlos?
b. ¿Utilizó los mismos materiales (en calidad y tipificación) indicados en ladocumentación?
c. ¿Reemplazó materiales, instrumentos, componentes, piezas, etc., sin alterarel resultado final previsto en el material?
d. La especificación de las herramientas a utilizar, ¿le resultó adecuada?
e. La cantidad de herramientas indicadas, ¿fue la necesaria?
f. Los instrumentos, ¿estuvieron bien especificados?
g. El tipo y cantidad de instrumentos, ¿fueron los adecuados para armar elrecurso didáctico?
Sí No
4.1.5. En caso de que usted haya construido un recurso didáctico diferente al propuesto porel material de capacitación, le pedimos que nos indique si la razón fue:
a. El propuesto no se ajustaba a susnecesidades curriculares.
c. No pudo interpretar el manual deconstrucción.
b. No pudo conseguir los materi-ales o instrumentos indicados.
d. Otra (Por favor, especifíquela).
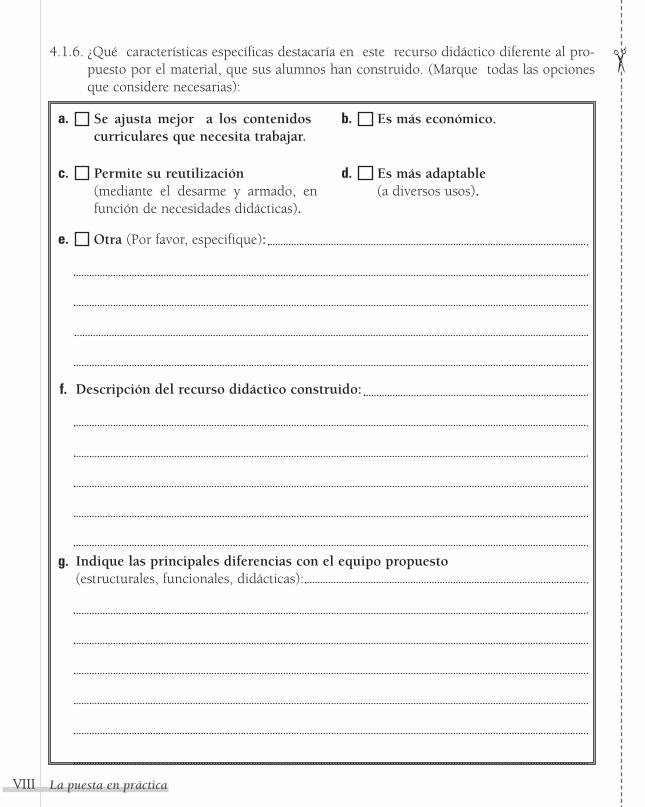
La puesta en práctica
4.1.6. ¿Qué características específicas destacaría en este recurso didáctico diferente al pro-puesto por el material, que sus alumnos han construido. (Marque todas las opcionesque considere necesarias):
a. Se ajusta mejor a los contenidoscurriculares que necesita trabajar.
c.
b. Es más económico.
d. Es más adaptable(a diversos usos).
e. Otra (Por favor, especifique):
Permite su reutilización(mediante el desarme y armado, enfunción de necesidades didácticas).
Descripción del recurso didáctico construido:f.
Indique las principales diferencias con el equipo propuesto(estructurales, funcionales, didácticas):
g.
VIII
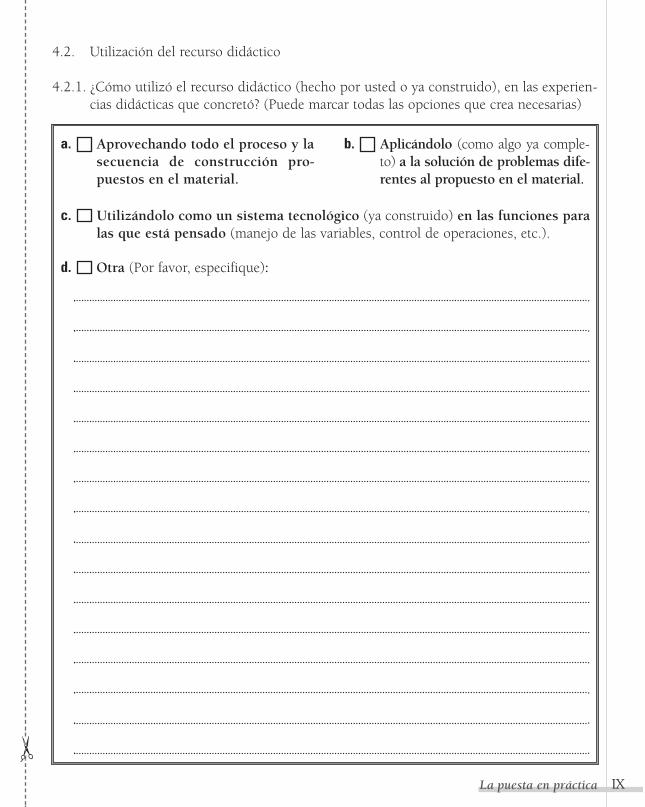
La puesta en práctica
a. Aprovechando todo el proceso y lasecuencia de construcción pro-puestos en el material.
c.
b. Aplicándolo (como algo ya comple-to) a la solución de problemas dife-rentes al propuesto en el material.
d. Otra (Por favor, especifique):
Utilizándolo como un sistema tecnológico (ya construido) en las funciones paralas que está pensado (manejo de las variables, control de operaciones, etc.).
4.2. Utilización del recurso didáctico
4.2.1. ¿Cómo utilizó el recurso didáctico (hecho por usted o ya construido), en las experien-cias didácticas que concretó? (Puede marcar todas las opciones que crea necesarias)
IX
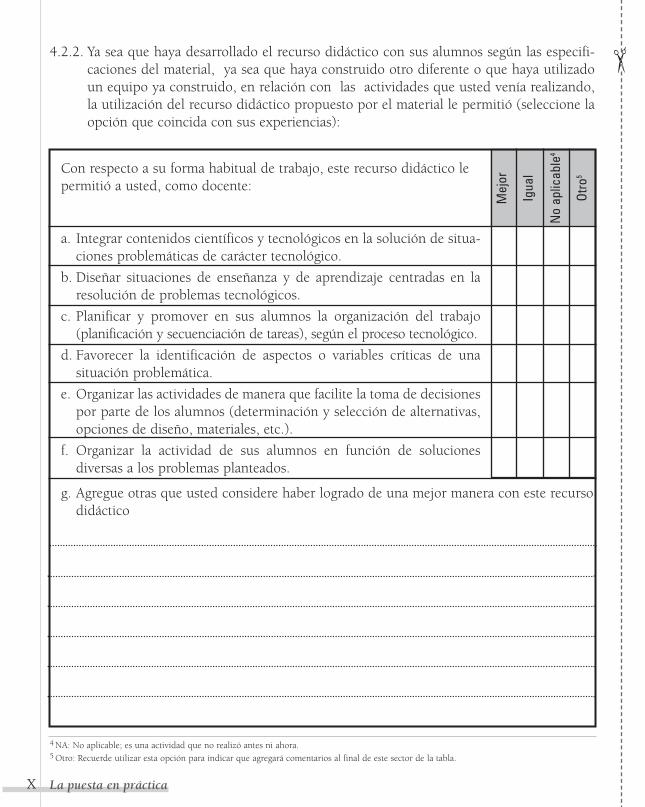
La puesta en práctica
Con respecto a su forma habitual de trabajo, este recurso didáctico lepermitió a usted, como docente:
a. Integrar contenidos científicos y tecnológicos en la solución de situa-ciones problemáticas de carácter tecnológico.
b. Diseñar situaciones de enseñanza y de aprendizaje centradas en laresolución de problemas tecnológicos.
c. Planificar y promover en sus alumnos la organización del trabajo(planificación y secuenciación de tareas), según el proceso tecnológico.
d. Favorecer la identificación de aspectos o variables críticas de unasituación problemática.
e. Organizar las actividades de manera que facilite la toma de decisionespor parte de los alumnos (determinación y selección de alternativas,opciones de diseño, materiales, etc.).
f. Organizar la actividad de sus alumnos en función de solucionesdiversas a los problemas planteados.
Mej
or
Igua
l
No
aplic
able
4
Otro
5
4.2.2. Ya sea que haya desarrollado el recurso didáctico con sus alumnos según las especifi-caciones del material, ya sea que haya construido otro diferente o que haya utilizadoun equipo ya construido, en relación con las actividades que usted venía realizando,la utilización del recurso didáctico propuesto por el material le permitió (seleccione laopción que coincida con sus experiencias):
g. Agregue otras que usted considere haber logrado de una mejor manera con este recursodidáctico
4 NA: No aplicable; es una actividad que no realizó antes ni ahora.5 Otro: Recuerde utilizar esta opción para indicar que agregará comentarios al final de este sector de la tabla.
X
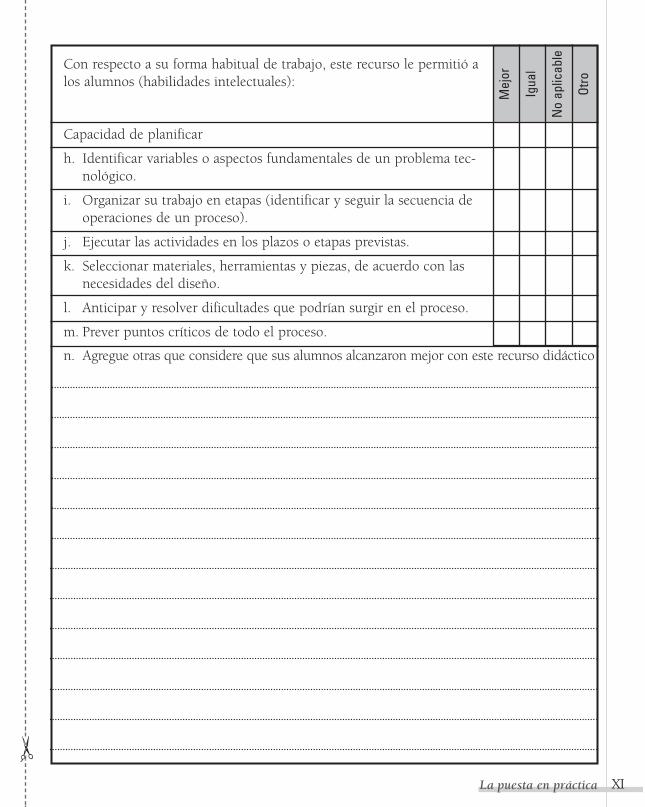
La puesta en práctica
Con respecto a su forma habitual de trabajo, este recurso le permitió alos alumnos (habilidades intelectuales):
Capacidad de planificar
h. Identificar variables o aspectos fundamentales de un problema tec-nológico.
i. Organizar su trabajo en etapas (identificar y seguir la secuencia deoperaciones de un proceso).
j. Ejecutar las actividades en los plazos o etapas previstas.
k. Seleccionar materiales, herramientas y piezas, de acuerdo con lasnecesidades del diseño.
l. Anticipar y resolver dificultades que podrían surgir en el proceso.
m. Prever puntos críticos de todo el proceso.
Mej
or
Igua
l
No
aplic
able
Otro
n. Agregue otras que considere que sus alumnos alcanzaron mejor con este recurso didáctico
XI
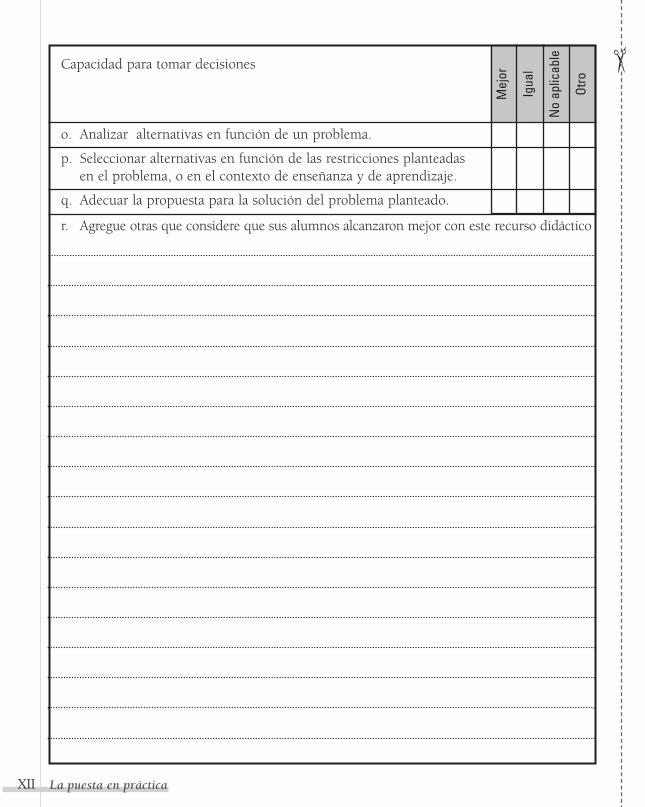
La puesta en práctica
Capacidad para tomar decisiones
o. Analizar alternativas en función de un problema.
p. Seleccionar alternativas en función de las restricciones planteadasen el problema, o en el contexto de enseñanza y de aprendizaje.
q. Adecuar la propuesta para la solución del problema planteado.
Mej
or
Igua
l
No
aplic
able
Otro
r. Agregue otras que considere que sus alumnos alcanzaron mejor con este recurso didáctico
XII
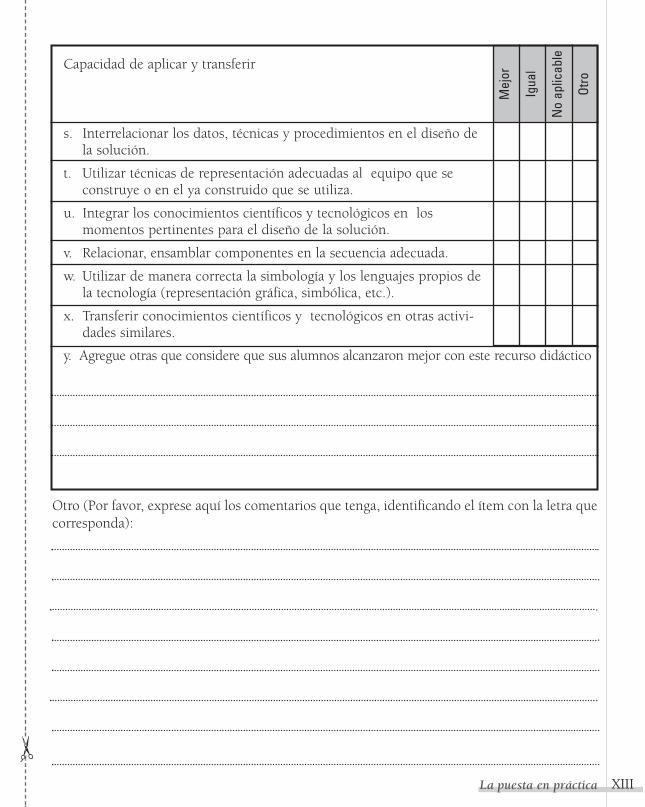
La puesta en práctica
Capacidad de aplicar y transferir
s. Interrelacionar los datos, técnicas y procedimientos en el diseño dela solución.
t. Utilizar técnicas de representación adecuadas al equipo que seconstruye o en el ya construido que se utiliza.
u. Integrar los conocimientos científicos y tecnológicos en losmomentos pertinentes para el diseño de la solución.
v. Relacionar, ensamblar componentes en la secuencia adecuada.
w. Utilizar de manera correcta la simbología y los lenguajes propios dela tecnología (representación gráfica, simbólica, etc.).
x. Transferir conocimientos científicos y tecnológicos en otras activi-dades similares.
Mej
or
Igua
l
No
aplic
able
Otro
y. Agregue otras que considere que sus alumnos alcanzaron mejor con este recurso didáctico
Otro (Por favor, exprese aquí los comentarios que tenga, identificando el ítem con la letra quecorresponda):
XIII
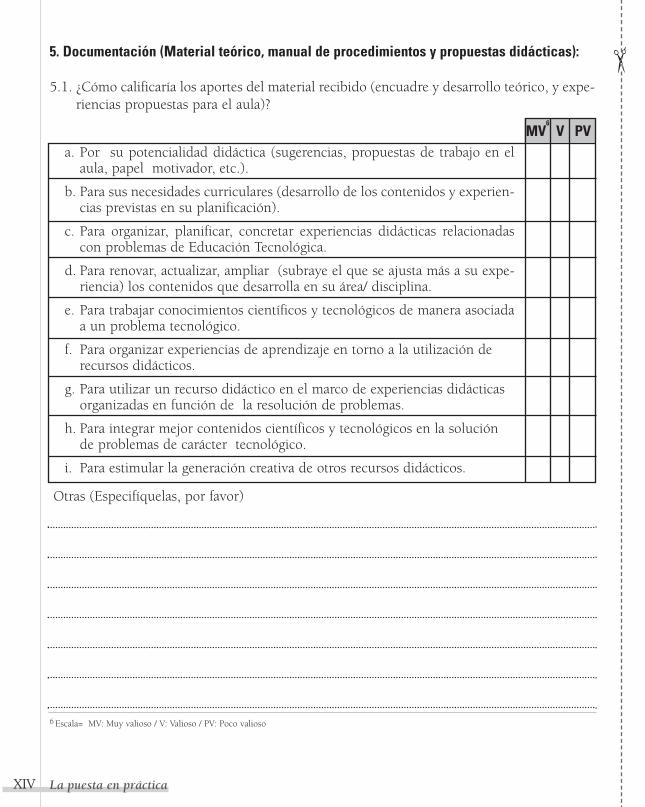
La puesta en práctica
5. Documentación (Material teórico, manual de procedimientos y propuestas didácticas):
5.1. ¿Cómo calificaría los aportes del material recibido (encuadre y desarrollo teórico, y expe-riencias propuestas para el aula)?
a. Por su potencialidad didáctica (sugerencias, propuestas de trabajo en elaula, papel motivador, etc.).
b. Para sus necesidades curriculares (desarrollo de los contenidos y experien-cias previstas en su planificación).
c. Para organizar, planificar, concretar experiencias didácticas relacionadascon problemas de Educación Tecnológica.
d. Para renovar, actualizar, ampliar (subraye el que se ajusta más a su expe-riencia) los contenidos que desarrolla en su área/ disciplina.
e. Para trabajar conocimientos científicos y tecnológicos de manera asociadaa un problema tecnológico.
f. Para organizar experiencias de aprendizaje en torno a la utilización derecursos didácticos.
g. Para utilizar un recurso didáctico en el marco de experiencias didácticasorganizadas en función de la resolución de problemas.
h. Para integrar mejor contenidos científicos y tecnológicos en la soluciónde problemas de carácter tecnológico.
i. Para estimular la generación creativa de otros recursos didácticos.
MV6
V PV
Otras (Especifíquelas, por favor)
6 Escala= MV: Muy valioso / V: Valioso / PV: Poco valioso
XIV
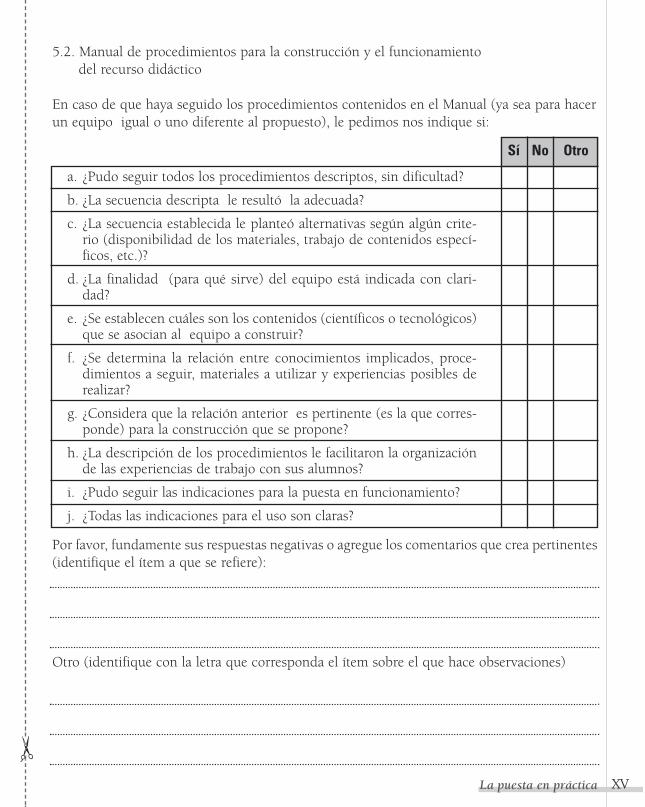
Sí OtroNo
La puesta en práctica
5.2. Manual de procedimientos para la construcción y el funcionamientodel recurso didáctico
En caso de que haya seguido los procedimientos contenidos en el Manual (ya sea para hacerun equipo igual o uno diferente al propuesto), le pedimos nos indique si:
a. ¿Pudo seguir todos los procedimientos descriptos, sin dificultad?
b. ¿La secuencia descripta le resultó la adecuada?
c. ¿La secuencia establecida le planteó alternativas según algún crite-rio (disponibilidad de los materiales, trabajo de contenidos especí-ficos, etc.)?
d. ¿La finalidad (para qué sirve) del equipo está indicada con clari-dad?
e. ¿Se establecen cuáles son los contenidos (científicos o tecnológicos)que se asocian al equipo a construir?
f. ¿Se determina la relación entre conocimientos implicados, proce-dimientos a seguir, materiales a utilizar y experiencias posibles derealizar?
g. ¿Considera que la relación anterior es pertinente (es la que corres-ponde) para la construcción que se propone?
h. ¿La descripción de los procedimientos le facilitaron la organizaciónde las experiencias de trabajo con sus alumnos?
i. ¿Pudo seguir las indicaciones para la puesta en funcionamiento?
j. ¿Todas las indicaciones para el uso son claras?
Otro (identifique con la letra que corresponda el ítem sobre el que hace observaciones)
Por favor, fundamente sus respuestas negativas o agregue los comentarios que crea pertinentes(identifique el ítem a que se refiere):
XV
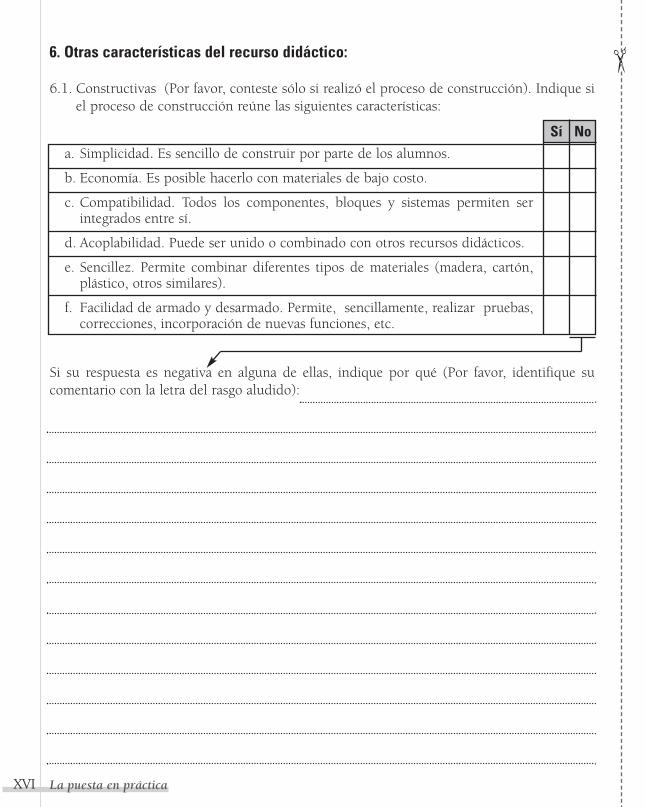
La puesta en práctica
6. Otras características del recurso didáctico:
6.1. Constructivas (Por favor, conteste sólo si realizó el proceso de construcción). Indique siel proceso de construcción reúne las siguientes características:
a. Simplicidad. Es sencillo de construir por parte de los alumnos.
b. Economía. Es posible hacerlo con materiales de bajo costo.
c. Compatibilidad. Todos los componentes, bloques y sistemas permiten serintegrados entre sí.
d. Acoplabilidad. Puede ser unido o combinado con otros recursos didácticos.
e. Sencillez. Permite combinar diferentes tipos de materiales (madera, cartón,plástico, otros similares).
f. Facilidad de armado y desarmado. Permite, sencillamente, realizar pruebas,correcciones, incorporación de nuevas funciones, etc.
Sí No
Si su respuesta es negativa en alguna de ellas, indique por qué (Por favor, identifique sucomentario con la letra del rasgo aludido):
XVI
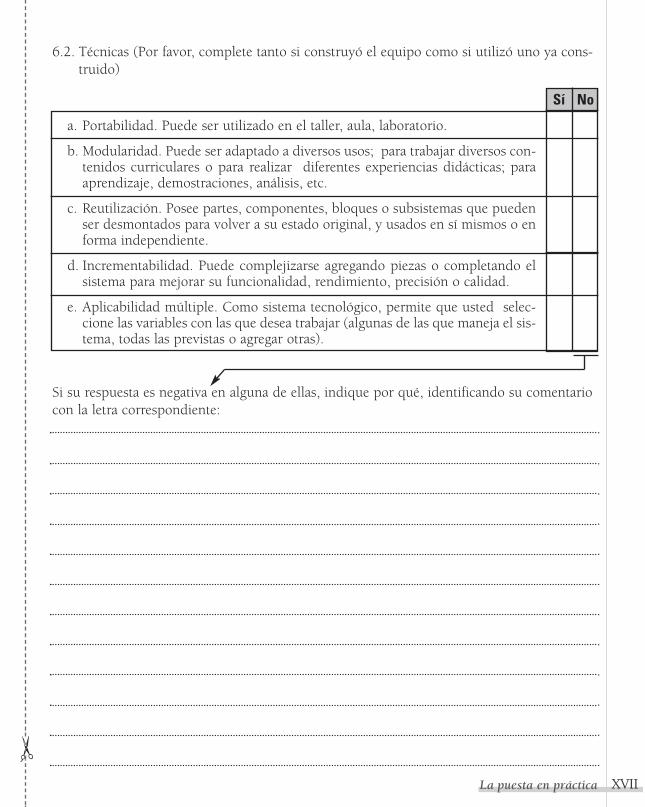
La puesta en práctica
6.2. Técnicas (Por favor, complete tanto si construyó el equipo como si utilizó uno ya cons-truido)
a. Portabilidad. Puede ser utilizado en el taller, aula, laboratorio.
b. Modularidad. Puede ser adaptado a diversos usos; para trabajar diversos con-tenidos curriculares o para realizar diferentes experiencias didácticas; paraaprendizaje, demostraciones, análisis, etc.
c. Reutilización. Posee partes, componentes, bloques o subsistemas que puedenser desmontados para volver a su estado original, y usados en sí mismos o enforma independiente.
d. Incrementabilidad. Puede complejizarse agregando piezas o completando elsistema para mejorar su funcionalidad, rendimiento, precisión o calidad.
e. Aplicabilidad múltiple. Como sistema tecnológico, permite que usted selec-cione las variables con las que desea trabajar (algunas de las que maneja el sis-tema, todas las previstas o agregar otras).
Sí No
Si su respuesta es negativa en alguna de ellas, indique por qué, identificando su comentariocon la letra correspondiente:
XVII
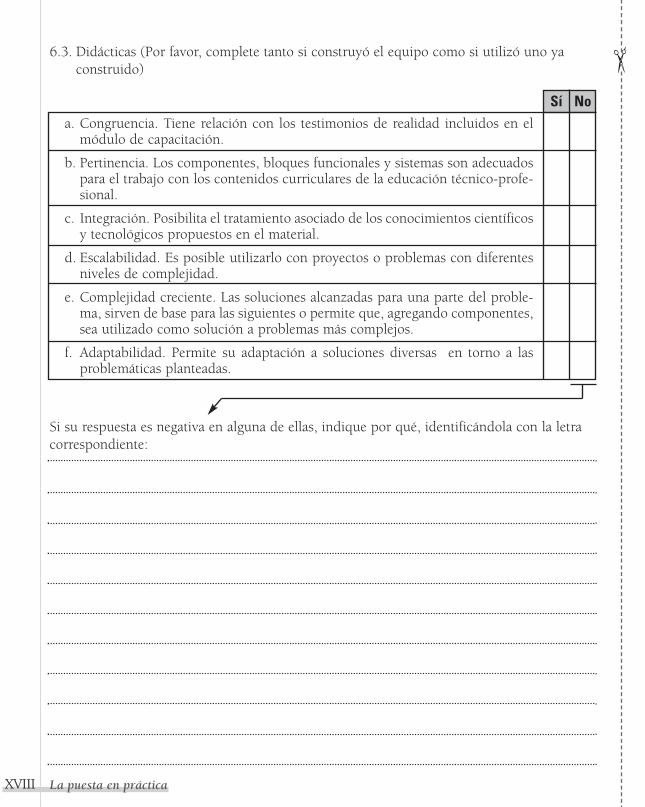
La puesta en práctica
6.3. Didácticas (Por favor, complete tanto si construyó el equipo como si utilizó uno yaconstruido)
a. Congruencia. Tiene relación con los testimonios de realidad incluidos en elmódulo de capacitación.
b. Pertinencia. Los componentes, bloques funcionales y sistemas son adecuadospara el trabajo con los contenidos curriculares de la educación técnico-profe-sional.
c. Integración. Posibilita el tratamiento asociado de los conocimientos científicosy tecnológicos propuestos en el material.
d. Escalabilidad. Es posible utilizarlo con proyectos o problemas con diferentesniveles de complejidad.
e. Complejidad creciente. Las soluciones alcanzadas para una parte del proble-ma, sirven de base para las siguientes o permite que, agregando componentes,sea utilizado como solución a problemas más complejos.
f. Adaptabilidad. Permite su adaptación a soluciones diversas en torno a lasproblemáticas planteadas.
Sí No
Si su respuesta es negativa en alguna de ellas, indique por qué, identificándola con la letracorrespondiente:
XVIII
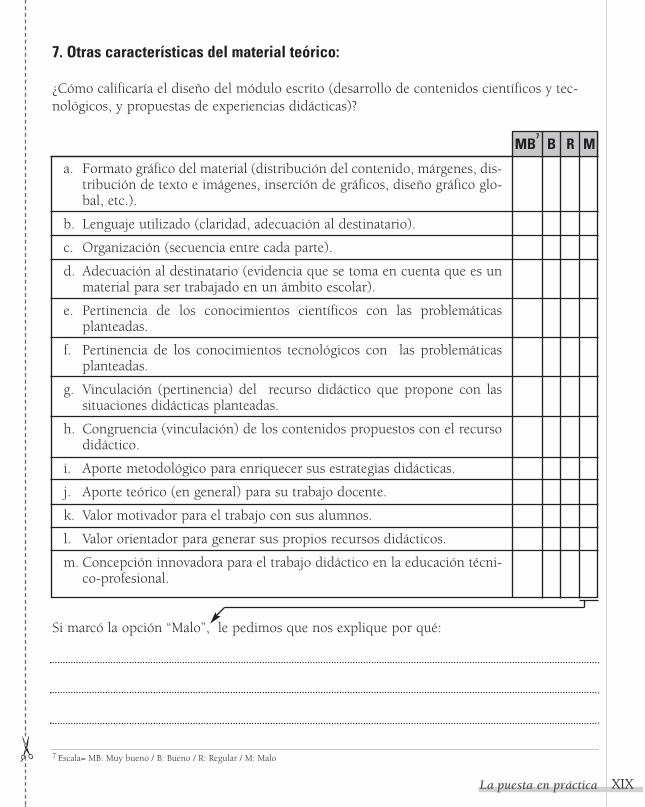
La puesta en práctica
7. Otras características del material teórico:
¿Cómo calificaría el diseño del módulo escrito (desarrollo de contenidos científicos y tec-nológicos, y propuestas de experiencias didácticas)?
a. Formato gráfico del material (distribución del contenido, márgenes, dis-tribución de texto e imágenes, inserción de gráficos, diseño gráfico glo-bal, etc.).
b. Lenguaje utilizado (claridad, adecuación al destinatario).
c. Organización (secuencia entre cada parte).
d. Adecuación al destinatario (evidencia que se toma en cuenta que es unmaterial para ser trabajado en un ámbito escolar).
e. Pertinencia de los conocimientos científicos con las problemáticasplanteadas.
f. Pertinencia de los conocimientos tecnológicos con las problemáticasplanteadas.
g. Vinculación (pertinencia) del recurso didáctico que propone con lassituaciones didácticas planteadas.
h. Congruencia (vinculación) de los contenidos propuestos con el recursodidáctico.
i. Aporte metodológico para enriquecer sus estrategias didácticas.
j. Aporte teórico (en general) para su trabajo docente.
k. Valor motivador para el trabajo con sus alumnos.
l. Valor orientador para generar sus propios recursos didácticos.
m. Concepción innovadora para el trabajo didáctico en la educación técni-co-profesional.
MB7
B MR
Si marcó la opción “Malo”, le pedimos que nos explique por qué:
7 Escala= MB: Muy bueno / B: Bueno / R: Regular / M: Malo
XIX
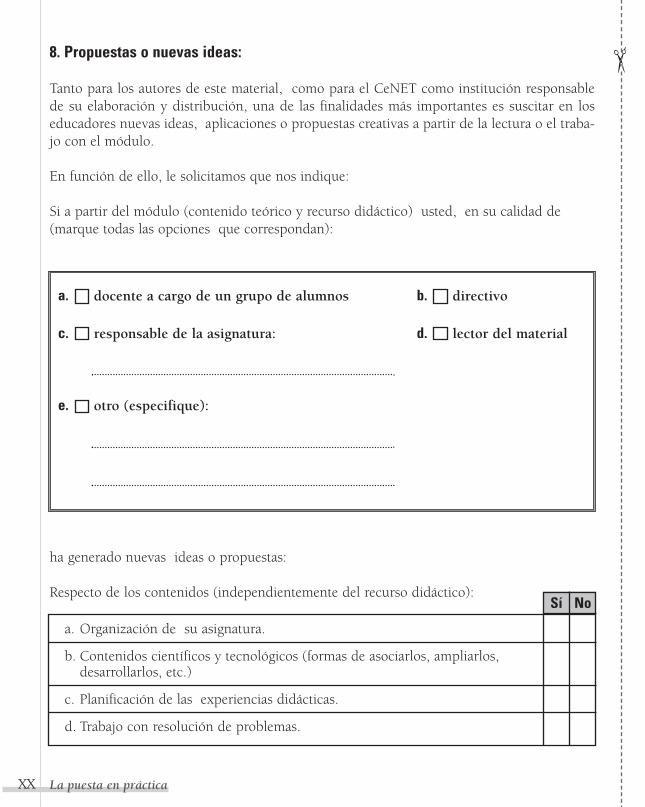
La puesta en práctica
8. Propuestas o nuevas ideas:
Tanto para los autores de este material, como para el CeNET como institución responsablede su elaboración y distribución, una de las finalidades más importantes es suscitar en loseducadores nuevas ideas, aplicaciones o propuestas creativas a partir de la lectura o el traba-jo con el módulo.
En función de ello, le solicitamos que nos indique:
Si a partir del módulo (contenido teórico y recurso didáctico) usted, en su calidad de(marque todas las opciones que correspondan):
a. docente a cargo de un grupo de alumnos
c. responsable de la asignatura:
b. directivo
d. lector del material
e. otro (especifique):
ha generado nuevas ideas o propuestas:
Respecto de los contenidos (independientemente del recurso didáctico):
a. Organización de su asignatura.
b. Contenidos científicos y tecnológicos (formas de asociarlos, ampliarlos,desarrollarlos, etc.)
c. Planificación de las experiencias didácticas.
d. Trabajo con resolución de problemas.
Sí No
XX
La puesta en práctica
Otras (Por favor, especifique en qué ámbitos ligados con los contenidos ha generado estasnuevas ideas o propuestas):
Si su respuesta fue afirmativa le pedimos que la amplíe:
XXI
La puesta en práctica
En relación con el recurso didáctico. Le pedimos que nos relate (libremente) las nuevas ideaso propuestas que el trabajo con este material le ha suscitado:
XXII
Sí
La puesta en práctica
No
En caso negativo, por favor, indíquenos por qué:
¿Puso en práctica alguna de estas ideas o propuestas?
¿Cuál/es?
XXIII
Títulos en preparación de la serie “Recursos didácticos”.
- Agenda electrónica para personas con disminución visual
- Arquitectura bioclimática
- Auto solar
- Banco de trabajo
- Generador eólico
- Manipulador neumático
- Máquina de vapor
- Matriceria. Moldes y modelos
- Planta de tratamiento de aguas residuales
- Simuladores interconectables basados en lógica digital
- Sismógrafo
- Sistemas SCADA para el control de procesos industriales
- Tren de aterrizaje