rectas e planos · 2016-10-11 · a se toma outro punto b e un vector paralelo a , resultan outras...
TRANSCRIPT

1
RECTAS E PLANOS
Índice
1. Coordenadas dun punto no espazo. Sistema de referencia ...................................... 1
2. Coordenadas dun vector de extremos coñecidos ..................................................... 2
3. Ecuacións dunha recta ............................................................................................. 3
3.1. Determinación lineal dunha recta. Ecuacións paramétricas e continua .............. 3
3.2. Recta que pasa por dous puntos. Comprobar se tres puntos están aliñados ..... 4
3.3. Segmento de recta ............................................................................................. 5
4. Posicións relativas de dúas rectas ............................................................................ 6
5. Ecuacións dun plano ................................................................................................. 8
5.1. Ecuación xeral do plano ..................................................................................... 8
5.2. Ecuacións paramétricas do plano ...................................................................... 8
5.3. Paso das ecuacións paramétricas á xeral e viceversa ....................................... 9
5.4. Outras determinacións do plano ....................................................................... 10
6. Posicións relativas de dous planos ......................................................................... 11
7. Posicións relativas de tres planos ........................................................................... 13
8. Posicións relativas de recta e plano ........................................................................ 15
9. Algúns problemas de rectas e planos ..................................................................... 16
1. Coordenadas dun punto no espazo. Sistema de referencia
Escóllese un punto arbitrario do espazo, que se simboliza por O e se lle chama orixe de coordenadas. Entre O e calquera outro punto do espazo, P, pódese trazar o vector
OP . A este vector chámaselle vector de posición do punto P porque dende O
localiza ao punto P.
O vector de posición OP pódese escribir como combinación lineal dos vectores dunha
base do espazo, { 1u
, 2u
, 3u
}, e así obtense a
expresión OP = a1 1u
+ b1 2u
+ c1 3u
.
Se, para simplificar as cousas, a base escollida
é a base ortonormal { i
, j
, k
}, entón tense
OP = x1 i
+ y1 j
+ z1 k
.
Aos números (x1, y1, z1), coeficientes da combinación lineal anterior, chámaselles coordenadas cartesianas do punto P relativas
ao punto O e á base { i
, j
, k
}. Ao conxunto
heteroxéneo formado por O e { i
, j
, k
}
2
denomínaselle sistema de referencia e simbolízase por R = {O; i
, j
, k
}. Neste caso
o sistema de referencia é ortonormal por selo os vectores da base.
É evidente que se se toma outro punto como orixe de coordenadas, por exemplo Q, e
tres vectores linealmente independentes {u
, v
, w
}, tense outro sistema de referencia
R1 = {Q; u
, v
, w
} respecto o cal as coordenadas do punto P serán distintas de
(x1, y1, z1).
No sucesivo farase uso unicamente do sistema de referencia ortonormal
R = {O; i
, j
, k
} e as coordenadas cartesianas dos puntos do espazo estarán
referidas a el.
Dende o momento en que a cada punto do espazo, fixado un sistema de referencia, se lle poden asociar de modo único tres números, chamados as súas coordenadas,
simbolízase ao conxunto de todos os puntos do espazo por ℝ3.
Exemplo:
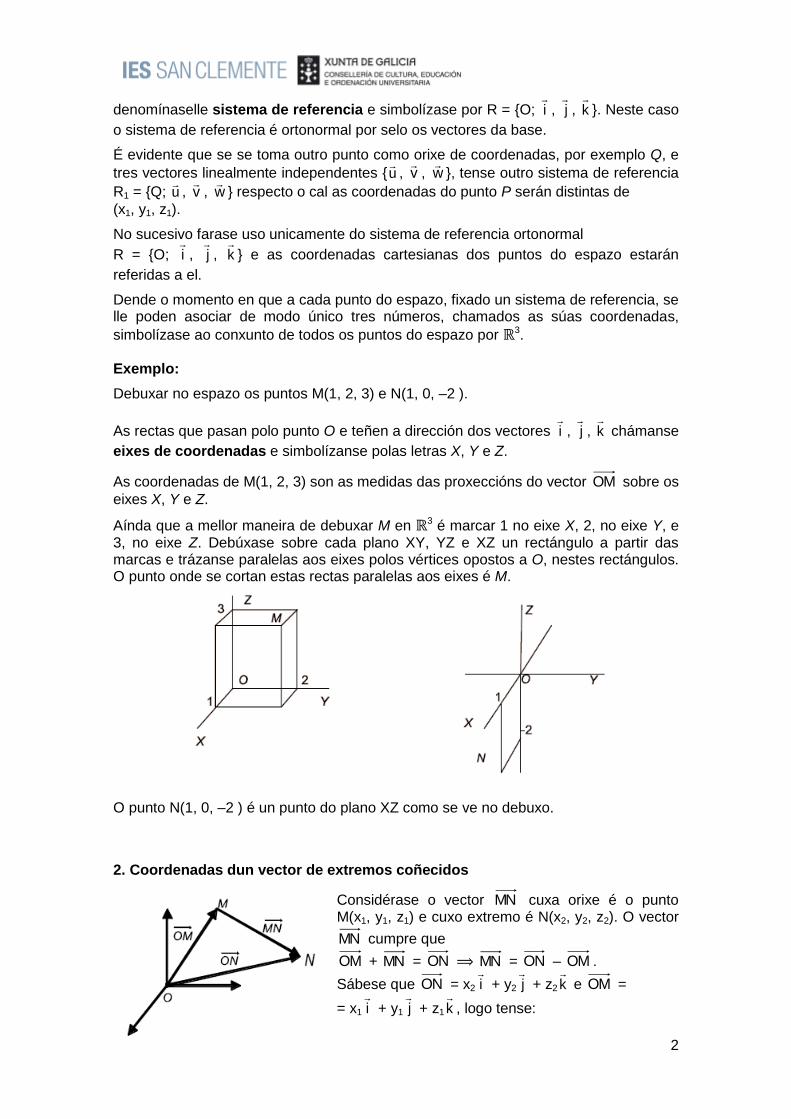
Debuxar no espazo os puntos M(1, 2, 3) e N(1, 0, –2 ).
As rectas que pasan polo punto O e teñen a dirección dos vectores i
, j
, k
chámanse
eixes de coordenadas e simbolízanse polas letras X, Y e Z.
As coordenadas de M(1, 2, 3) son as medidas das proxeccións do vector OM sobre os
eixes X, Y e Z.
Aínda que a mellor maneira de debuxar M en ℝ3 é marcar 1 no eixe X, 2, no eixe Y, e 3, no eixe Z. Debúxase sobre cada plano XY, YZ e XZ un rectángulo a partir das marcas e trázanse paralelas aos eixes polos vértices opostos a O, nestes rectángulos. O punto onde se cortan estas rectas paralelas aos eixes é M.
O punto N(1, 0, –2 ) é un punto do plano XZ como se ve no debuxo.
2. Coordenadas dun vector de extremos coñecidos
Considérase o vector MN cuxa orixe é o punto M(x1, y1, z1) e cuxo extremo é N(x2, y2, z2). O vector
MN cumpre que
OM + MN = ON ⟹ MN = ON – OM .
Sábese que ON = x2 i
+ y2 j
+ z2 k
e OM =
= x1 i
+ y1 j
+ z1 k
, logo tense:
3
MN = (x2 – x1) i
+ (y2 – y1) j
+ (z2 – z1)k
.
Co que se pode afirmar que as coordenadas do vector MN , de extremos M(x1, y1, z1) e N(x2, y2, z2), son igual á diferenza de coordenadas de N e M:
MN = (x2 – x1, y2 – y1, z2 – z1) Exemplo:
Dados os puntos A(2, 4, –3), B(1, –3, 0) e C(–5, 3, 1 ), acha as coordenadas dos
vectores AB , AC, BC , BA , CA e CB .
AB= (1 – 2, –3 – 4, 0 – (–3)) = (–1, –7, 3), AC = (–5 – 2, 3 – 4, 1 – (–3)) = (–7, –1, 4)
BC = (–5 – 1, 3 – (–3), 1 – 0) = (–6, 6, 1), BA = (2 – 1, 4 – (–3), –3 – 0) = (1, 7, –3)
CA = (2 – (–5), 4 – 3, –3 – 1) = (7, 1, –4), CB = (1 – (–5), –3 – 3, 0 – 1) = (6, –6, –1)
3. Ecuacións dunha recta
3.1. Determinación lineal dunha recta. Ecuacións paramétricas e continua
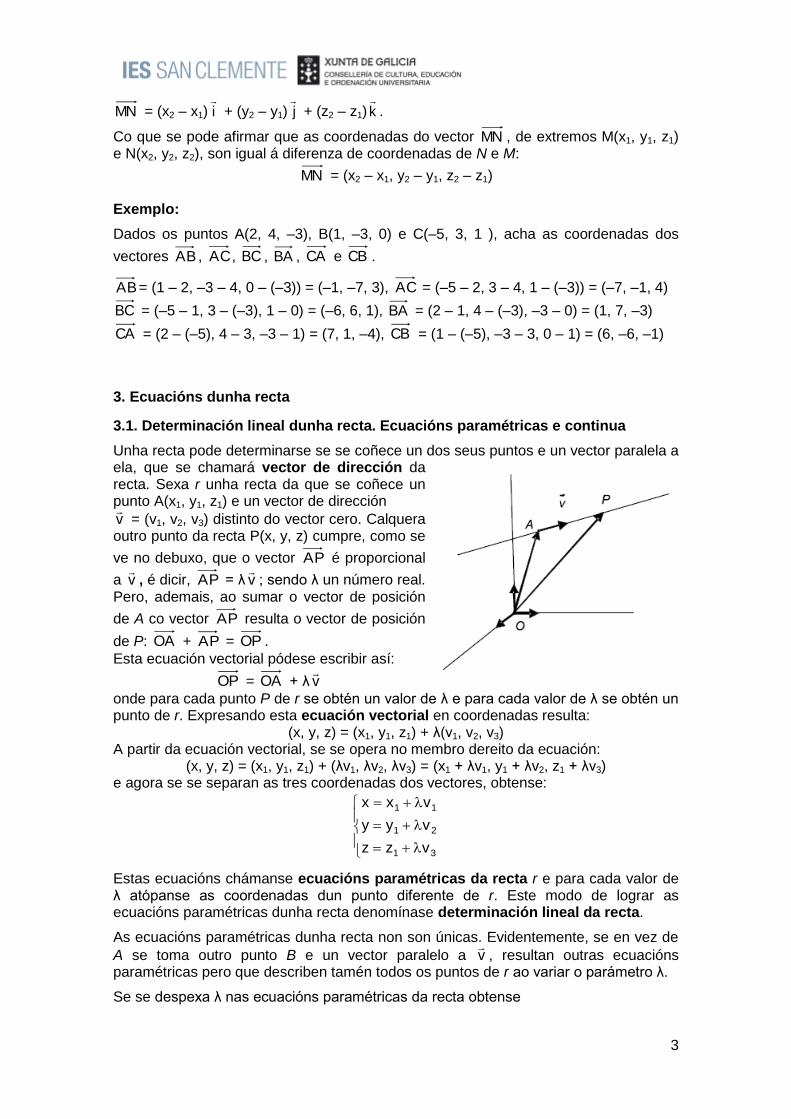
Unha recta pode determinarse se se coñece un dos seus puntos e un vector paralela a ela, que se chamará vector de dirección da recta. Sexa r unha recta da que se coñece un punto A(x1, y1, z1) e un vector de dirección
v
= (v1, v2, v3) distinto do vector cero. Calquera outro punto da recta P(x, y, z) cumpre, como se
ve no debuxo, que o vector AP é proporcional
a v
, é dicir, AP = λ v
; sendo λ un número real. Pero, ademais, ao sumar o vector de posición
de A co vector AP resulta o vector de posición
de P: OA + AP = OP .
Esta ecuación vectorial pódese escribir así:
OP = OA + λ v
onde para cada punto P de r se obtén un valor de λ e para cada valor de λ se obtén un punto de r. Expresando esta ecuación vectorial en coordenadas resulta:
(x, y, z) = (x1, y1, z1) + λ(v1, v2, v3) A partir da ecuación vectorial, se se opera no membro dereito da ecuación:
(x, y, z) = (x1, y1, z1) + (λv1, λv2, λv3) = (x1 + λv1, y1 + λv2, z1 + λv3) e agora se se separan as tres coordenadas dos vectores, obtense:
31
21
11
vzz
vyy
vxx
Estas ecuacións chámanse ecuacións paramétricas da recta r e para cada valor de λ atópanse as coordenadas dun punto diferente de r. Este modo de lograr as ecuacións paramétricas dunha recta denomínase determinación lineal da recta.
As ecuacións paramétricas dunha recta non son únicas. Evidentemente, se en vez de
A se toma outro punto B e un vector paralelo a v
, resultan outras ecuacións paramétricas pero que describen tamén todos os puntos de r ao variar o parámetro λ.
Se se despexa λ nas ecuacións paramétricas da recta obtense

4
λ = 1
1
v
xx =
2
1
v
yy =
3
1
v
zz
A expresión 1
1
v
xx =
2
1
v
yy =
3
1
v
zz coñecese como ecuacións en forma continua
da recta r.
Ás veces nas ecuacións continuas pode aparecer un cero nalgún denominador, non en todos, pero debe terse en conta que non se está dividindo entre 0, senón que os numeradores son proporcionais aos denominadores e se un destes é 0, tamén o será o numerador correspondente. Exemplo:
Achar as ecuacións paramétricas e continuas da recta que pasa por A(–1, 2, –3) e ten
como vector director v
= (3, 0, –2).
Ecuacións paramétricas da recta:
23z
2y
31x
.
Ecuacións en forma continua: 3
1x =
0
2y =
2
3z
3.2. Recta que pasa por dous puntos. Comprobar se tres puntos están aliñados
Sábese que por dous puntos pasa unha única recta. Se se queren achar as ecuacións paramétricas dunha recta que pasa polos puntos A(x1, y1, z1) e B(x2, y2, z2), tómase un dos puntos por onde pasa r, por exemplo A, e como vector de dirección ou vector
director, o vector AB . Trátase tamén dunha determinación lineal. Exemplo:
Achar a ecuación da recta que pasa polos puntos A(–1, 4, –5) e B(3, –6, –2). Estase ante a recta que pasa por A(–1, 4, –5) e ten como vector director
AB = (4, –10, 3), logo as ecuacións paramétricas son:
35z
104y
41x
e as continuas:
4
1x =
10
4y
=
3
5z .
Tres puntos, A(x1, y1, z1), B(x2, y2, z2) e C(x3, y3, z3), están aliñados (ou son colineais) se pertencen á mesma recta. Isto tradúcese en que os
vectores AB e AC teñen a mesma dirección e, polo tanto,
son proporcionais, é dicir,
rango( AB , AC) = 1 ou 13
12
xx
xx
=
13
12
yy
yy
=
13
12
zz
zz

5
Exemplo:
Comprobar se os puntos A(7, –16, 1), B(–5, 14, –8) e C(3, –6, –2) están aliñados.
Como AB = (–5 – 7, 14 – (–16), –8 – 1) = (–1, 30, –9) e
AC = (3 – 7, –6 – (–16), –2 – 1) = (–4, 10, –3), entonces tense:
rango( AB , AC) = rango
3104
93012 = 1, xa que as dúas filas son proporcionais
ou, de outro modo, 4
12
=
10
30 =
3
9
= 2.
Logo os tres puntos están aliñados.
3.3. Segmento de recta
A recta r, que pasa polos puntos A(x1, y1, z1) e B(x2, y2, z2), ten as seguintes ecuacións paramétricas:
)zz(zz
)yy(yy
)xx(xx
121
121
121
Cando λ = 0, (x, y, z) = (x1, y1, z1), alcánzase o punto A. Cando λ = 1, (x, y, z) = (x1, y1, z1) + (x2 – x1, y2 – y1, z2 – z1) = (x2, y2, z2), o punto alcanzado é B. Logo o segmento de extremos A e B é o conxunto de puntos:
{(x, y, z) = (x1, y1, z1) + λ(x2 – x1, y2 – y1, z2 – z1), 0 ≤ λ ≤ 1}
As coordenadas do punto que divide ao segmento AB en dúas partes iguais, o punto
medio, áchanse tomando λ = 2
1 e son:
(x, y, z) = (x1, y1, z1) + 2
1(x2 – x1, y2 – y1, z2 – z1) =
2
zz,
2
yy,
2
xx 212121
Se na fórmula anterior faise que λ tome os valores n
1,
n
2, ...,
n
1n , determínanse
n – 1 puntos que dividen ao segmento AB en n partes iguais. Exemplo:
Achar as coordenadas do punto medio do segmento de extremos A(1, 2, 4) e B(4, 3, 2).
O punto medio do segmento AB é MAB =
2
24,
2
32,
2
41 =
3,
2
5,
2
5.
Achar as coordenadas dos puntos que dividen ao segmento AB anterior en tres partes iguais.
As coordenadas dos puntos N1 e N2 que dividen ao segmento AB en tres partes iguais obtéñense dando a λ, en (x, y, z) = (x1, y1, z1) + λ(x2 – x1, y2 – y1, z2 – z1), os
valores 3
1 e
3
2. Entón tense:
N1 = (1, 2, 4) + 3
1(4 – 1, 3 – 2, 2 – 4) = (1, 2, 4) +
3
2,
3
1,1 =
3
10,
3
7,2
6
N2 = (1, 2, 4) + 3
2(4 – 1, 3 – 2, 2 – 4) = (1, 2, 4) +
3
4,
3
2,2 =
3
8,
3
8,3
4. Posicións relativas de dúas rectas
Supóñanse dúas rectas: r, que pasa por A ten como vector director v
, e s, que pasa
por B ten como vector director w
. As posicións que poden adoptar r e s son:
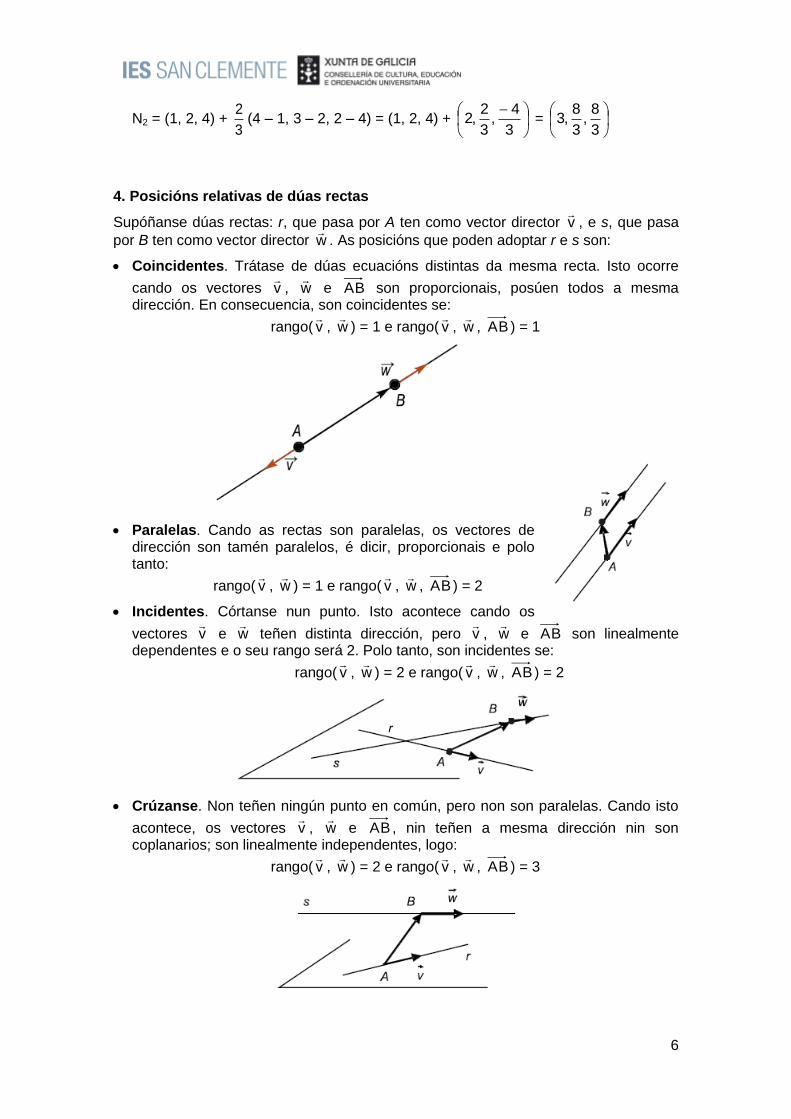
Coincidentes. Trátase de dúas ecuacións distintas da mesma recta. Isto ocorre
cando os vectores v
, w
e AB son proporcionais, posúen todos a mesma dirección. En consecuencia, son coincidentes se:
rango( v
, w
) = 1 e rango( v
, w
, AB ) = 1
Paralelas. Cando as rectas son paralelas, os vectores de dirección son tamén paralelos, é dicir, proporcionais e polo tanto:
rango( v
, w
) = 1 e rango( v
, w
, AB ) = 2
Incidentes. Córtanse nun punto. Isto acontece cando os
vectores v
e w
teñen distinta dirección, pero v
, w
e AB son linealmente dependentes e o seu rango será 2. Polo tanto, son incidentes se:
rango( v
, w
) = 2 e rango( v
, w
, AB ) = 2
Crúzanse. Non teñen ningún punto en común, pero non son paralelas. Cando isto
acontece, os vectores v
, w
e AB , nin teñen a mesma dirección nin son coplanarios; son linealmente independentes, logo:
rango( v
, w
) = 2 e rango( v
, w
, AB ) = 3

7
Exemplo:
Estudar as posicións relativas dos seguintes pares de rectas. Achar as coordenadas do punto de corte cando o par de rectas sexan coincidentes.
a) 2
4x =
3
2y =
4
1z
e
4
x
=
6
4y
=
8
7z
b) 2
2x =
3
1y =
4
3z
e
4
5x
=
6
2y
=
8
4z
c) 3
1x =
1
2y
=
2
3z e (x, y, z) = (3 + λ, –2, –5 – λ)
d) (x, y, z) = (1, 1 + λ, 3 – 2λ) e (x, y, z) = (3 + 2μ, 4, –μ)
a) rango
864
432 = 1, rango
864
864
432
= 1, as rectas son coincidentes.
b) rango
864
432 = 1, rango
113
864
432
= 2, as rectas son paralelas.
c) rango
101
213 = 2, rango
202
101
213
= 2, as rectas son incidentes.
Ponse a primeira recta en paramétricas utilizando a letra μ para o parámetro:
23z
2y
31x
Se as rectas se cortan, compartirán un punto; logo existirá un valor para μ e outro para λ, que postos nas ecuacións paramétricas respectivas darán as coordenadas dese punto. Isto equivale a que teña solución o sistema:
523
22
331
ou
22
0
23
Neste caso é fácil ver que μ = 0 e que, substituíndonas outras ecuacións, obtense λ = –2. O punto de corte conséguese ao poñer μ = 0 e λ = –2 nas ecuacións paramétricas e resulta ser (1, –2, –3).
d) rango
102
210 = 2, rango
332
102
210
= 3, as rectas crúzanse.

8
5. Ecuacións dun plano
5.1. Ecuación xeral do plano
Todos os puntos dun plano quedan inequivocamente determinados se se coñece un punto do plano e un vector perpendicular a el. Supóñase un plano π do que se coñece
o punto A(x1, y1, z1) e un vector n
= (a, b, c) perpendicular ao plano (ou normal ao plano). Para calquera outro punto de plano
P(x, y, z) ocorre que os vectores n
e AP , como se ve no debuxo, son ortogonais; en consecuencia, o seu produto é cero:
n
• AP = 0 Se se poñen os vectores en coordenadas, obtense: (a, b, c) • (x – x1, y – y1, z – z1) = 0 ⟹ a(x – x1) + b(y – y1) + c(z – z1) = 0 ⟹
⟹ ax + by + cz – ax1 – by1 – cz1 = 0 Se se simboliza o número –ax1 – by1 – cz1 por d, entón resulta:
ax + by + cz + d = 0 Esta ecuación denomínase ecuación xeral ou implícita do plano π, e ademais, salvo o produto por un número, é única.
É posible demostrar que toda ecuación do tipo ax + by + cz + d = 0 corresponde a un
plano de vector normal n
= (a, b, c) e que pasa por un punto A(x1, y1, z1) cuxas coordenadas son solución da ecuación, é dicir, ax + by1 + cz1 + d = 0. Exemplo:
Acha a ecuación do plano que pasa polo punto A(–1, 1, 3) e ten como vector normal
n
= (2, 3, –4). Os tres primeiros coeficientes da ecuación xeral do plano son 2, 3 e –4, logo a ecuación será: 2x + 3y – 4z + d = 0. Como ademais pasa polo punto A(–1, 1, 3) cumprirase que:
2·(–1) + 3·1 – 4·3 + d = 0 ⟹ –11 + d = 0 ⟹ d = 11
5.2. Ecuacións paramétricas do plano
Tamén para o plano existe unha determinación lineal. Para iso son necesarios un punto, A(x1, y1, z1), e dous vectores contidos ou
paralelos ao plano, v
= (v1, v2, v3) e w
= (w1, w2, w3),
non paralelos entre si ( w
≠ λ v
), pois teñen que ser linealmente independentes para formar unha base do plano π, de modo que todo vector de dito plano escríbase como combinación lineal de ambos os dous. Calquera outro punto do plano, P(x, y, z), pode determinarse, como se observa no debuxo, da
ecuación vectorial: OP = OA + AP .
Pero ao ser AP combinación lineal de v
e w
,
pódese escribir: OP =OA + λ v
+ μ w
.
Expresando esta ecuación vectorial en coordenadas resulta: (x, y, z) = (x1, y1, z1) + λ(v1, v2, v3) + μ(w1, w2, w3)
A partir da ecuación vectorial, se se opera no membro dereito da ecuación: (x, y, z) = (x1, y1, z1) + (λv1, λv2, λv3) + (μw1, μw2, μw3) = = (x1 + λv1 + μw1, y1 + λv2 + μw2, z1 + λv3 + μw3)

9
e agora se se separan as tres coordenadas dos vectores, obtense:
331
221
111
wvzz
wvyy
wvxx
Estas ecuacións chámanse ecuacións paramétricas do plano π, e para cada valor que se lle dea aos parámetros λ e μ determínase un punto do plano. Exemplo:
Achar as ecuacións paramétricas do plano determinado polo punto A(2, –4, 3) e os
vectores paralelos v
= (3, –1, 2) e w
= (3, –1, 3).
Ecuacións paramétricas do plano:
323z
4y
32x
.
5.3. Paso das ecuacións paramétricas á xeral e viceversa
Se
331
221
111
wvzz
wvyy
wvxx
son as ecuación paramétricas dun plano que pasa por
A(x1, y1, z1) e ten como vectores paralelos ao plano v
= (v1, v2, v3) e w
= (w1, w2, w3),
con w
≠ λ v
, entón un punto P(x, y, z) pertence ao plano se existen valores de λ e μ que satisfán as igualdades anteriores. Isto equivale a dicir que P(x, y, z) pertence ao
plano, se o sistema
331
221
111
wvzz
wvyy
wvxx
ten solución para as incógnitas λ e μ. Claro
que este sistema terá solución, segundo o teorema de Rouché-Frobenius, se o rango da matriz dos coeficientes e o da matriz ampliada valen 2:
rango
33
22
11
wv
wv
wv
= rango
133
122
111
zzwv
yywv
xxwv
= 2
Se o rango da matriz ampliada vale 2, o seu determinante será cero:
133
122
111
zzwv
yywv
xxwv
= 0
Desenvolvendo o determinante polos elementos da última columna, tense:
(x – x1)33
22
wv
wv – (y – y1)
33
11
wv
wv + (z – z1)
22
11
wv
wv = 0
x33
22
wv
wv – y
33
11
wv
wv + z
22
11
wv
wv – x1
33
22
wv
wv + y1
33
11
wv
wv – z1
22
11
wv
wv = 0
Na última igualdade, obsérvase que os coeficientes de x, y, z son as coordenadas do
produto vectorial v
x w
, logo trátase dun vector perpendicular ao plano, chamando

10
a= 33
22
wv
wv, b= –
33
11
wv
wv, c =
22
11
wv
wv e d = –x1
33
22
wv
wv + y1
33
11
wv
wv – z1
22
11
wv
wv,
obtense a ecuación xeral do plano que pasa por A(x1, y1, z1) e ten como vectores
paralelos ao plano v
= (v1, v2, v3) e w
= (w1, w2, w3): ax + by + cz + d = 0
Ecuación que, como se sabe, é única, salvo un factor de proporcionalidade. O paso da ecuación xeral ás paramétricas é máis sinxelo. Se na ecuación ax + by + cz + d = 0 despéxase x, resulta:
x = –a
d –
a
by –
a
cz
Igualando y = λ e z = μ obtéñense as ecuacións
z
y
a
c
a
b
a
dx
, que son as
ecuacións paramétricas do plano que pasa polo punto
0,0,
a
d e ten como vectores
paralelos a el v
=
0,1,
a
b e w
=
1,0,
a
c. Hai que ter presente que as
ecuacións paramétricas dun plano non son únicas. Exemplo:
Achar as ecuacións paramétricas e xeral do plano que contén ao punto A(–1, 2, –1) e
ten como vectores paralelos v
= (2, 0, –3) e w
= (1, –3, 3).
As ecuacións paramétricas son:
331z
32y
21x
.
A ecuación xeral sae do determinante nulo:
1z33
2y30
1x12
= 0.
Ao desenvolver resulta –9x – 9y – 6z + 3 = 0; dividindo por –3, queda: 3x + 3y + 2z – 1 = 0
5.4. Outras determinacións do plano
Hai varias situacións que conducen a unha determinación lineal do plano.
Plano que pasa por tres puntos. O que por tres puntos pase un plano ten unha comprobación experimental sinxela no feito de que unha cadeira ou unha banqueta con tres patas nunca baila; e a razón é porque as tres patas adáptanse perfectamente ao plano do chan. Polo tanto, un plano determinado por tres puntos A, B e C é o mesmo que o que determina un punto, por exemplo, A, e é paralelo
aos vectores AB e AC.
Plano que determina unha recta e un punto. Unha recta r, que pasa por A e ten
como vector director v
, e un punto B, exterior a ela, tamén determinan un plano;
para iso tómase o punto A da recta r e como vectores paralelos ao plano v
e AB .
11
Plano que contén a dúas rectas paralelas. Unha recta r, que pasa por A e con
vector director v
, e outra s, que contén a B e con vector director w
, son paralelas ambas as dúas, configuran un plano cuxas ecuacións paramétricas pódense achar
tomando, por exemplo, o punto A e como vectores paralelos ao plano v
e AB .
Plano determinado por dúas rectas que se cortan. Se unha recta r, que pasa por
A e con vector director v
, e outra s, que contén a B e con vector director w
, son incidentes, entón cun dos puntos, A ou B, e tomando como vectores paralelos ao
plano v
e w
, tense unha determinación lineal da que achar a ecuación do plano.
6. Posicións relativas de dous planos
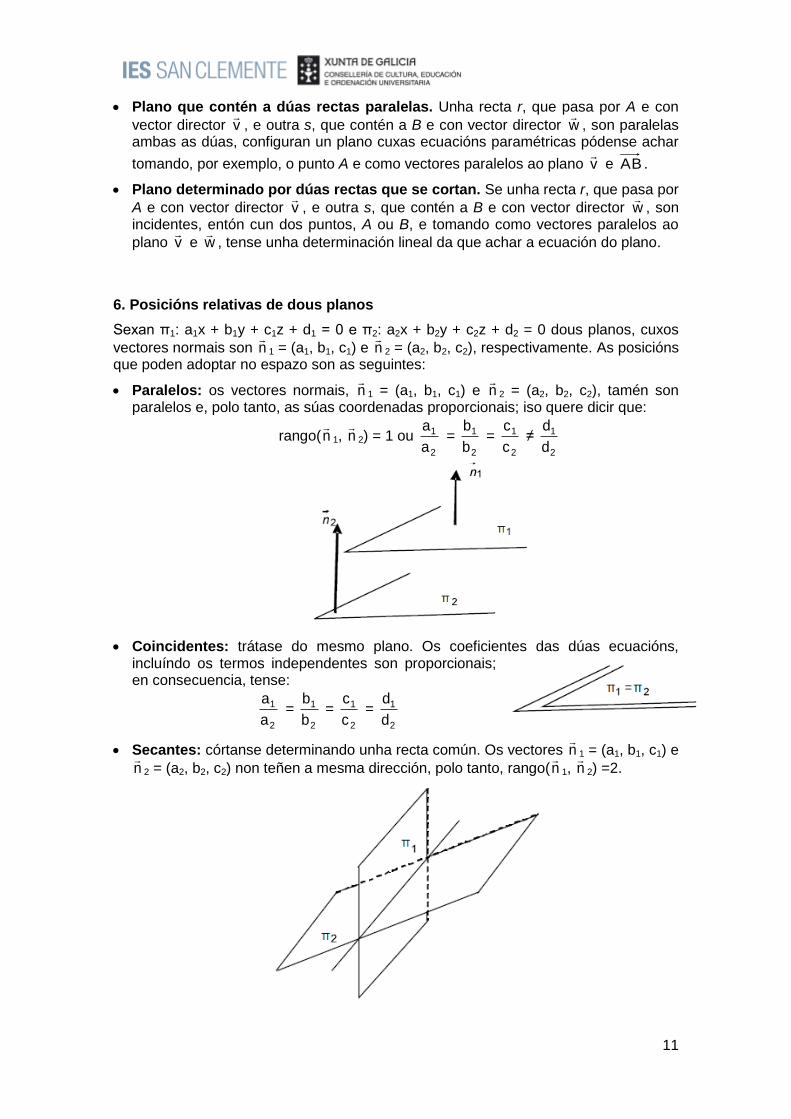
Sexan π1: a1x + b1y + c1z + d1 = 0 e π2: a2x + b2y + c2z + d2 = 0 dous planos, cuxos
vectores normais son n
1 = (a1, b1, c1) e n
2 = (a2, b2, c2), respectivamente. As posicións que poden adoptar no espazo son as seguintes:
Paralelos: os vectores normais, n
1 = (a1, b1, c1) e n
2 = (a2, b2, c2), tamén son paralelos e, polo tanto, as súas coordenadas proporcionais; iso quere dicir que:
rango(n
1, n
2) = 1 ou 2
1
a
a =
2
1
b
b =
2
1
c
c ≠
2
1
d
d
Coincidentes: trátase do mesmo plano. Os coeficientes das dúas ecuacións, incluíndo os termos independentes son proporcionais; en consecuencia, tense:
2
1
a
a =
2
1
b
b =
2
1
c
c =
2
1
d
d
Secantes: córtanse determinando unha recta común. Os vectores n
1 = (a1, b1, c1) e
n
2 = (a2, b2, c2) non teñen a mesma dirección, polo tanto, rango(n
1, n
2) =2.

12
Ademais a recta común aos dous planos ten como ecuacións paramétricas as
solucións do sistema formado polos dous planos:
0dczybxa
0dzcybxa
2222
1111.
Como neste sistema o rango da matriz dos coeficientes é 2, rango(n
1, n
2) =2, e hai tres incógnitas, entón as solucións dependerán dun parámetro. É dicir, relegando unha incógnita ao segundo membro das ecuacións, por exemplo z, as solucións
terán este aspecto:
z
vyy
vxx
20
10
, e que se pode identificar como a recta que pasa
polo punto (x0, y0, 0) e ten como vector director (v1, v2, 1). Cando unha recta vén dada polas ecuacións de dous planos dise que estas son as ecuacións implícitas da recta.
Das ecuacións continuas dunha recta é sinxelo atopar dúas ecuacións implícitas desa recta. As ecuacións continuas dunha recta r, da que se coñece un punto
A(x1, y1, z1) e un vector de dirección v
= (v1, v2, v3), son: 1
1
v
xx =
2
1
v
yy =
3
1
v
zz .
Das tres igualdades, se se collen dúas, por exemplo, a primeira fracción coa segunda e a primeira coa terceira, obtéñense as ecuacións de dous planos que
constitúen un par de ecuacións implícitas desa recta. É dicir, de 1
1
v
xx =
2
1
v
yy e
1
1
v
xx =
3
1
v
zz obtéñense as ecuacións dos planos
0zvxvzvxv
0yvxvyvxv
111313
111212.
Obviamente unha recta ten unha infinidade de ecuacións implícitas. Exemplo:
Estudar as posicións relativas dos pares de planos seguintes: a) 3x – y + 2z – 1 = 0 e –6x + 2y – 4z + 5 = 0 b) x – 2y + 3z + 2 = 0 e –3x + 6y – 9z – 6 = 0 c) 3x – y + 2z – 1 = 0 e x + y – 3z + 4 = 0
a) Como 6
3
=
2
1 =
4
2
≠
5
1, pódese afirmar que os planos son paralelos.
b) Como 3
1
=
6
2 =
9
3
=
6
2
, trátase de dúas ecuacións diferentes do mesmo
plano. Son coincidentes.
c) É evidente que 1
3 ≠
1
1 ≠
3
2
≠
4
1 ou rango
311
213 = 2. Logo trátase de
dous planos secantes. Feixe de planos Chámase feixe de planos de eixe r ao conxunto de todos os planos que contén á
recta r. Se de r coñécense as súas ecuacións implícitas, r:
0dzcybxa
0dzcybxa
2222
1111,
entón o feixe de eixe r vén dado por: α(a1x + b1y + c1z + d1) + β(a2x + b2y + c2z + d2)=0.

13
Para cada valor que se lle dea a α e β obtense a ecuación dun plano que, se pode demostrar, contén á recta r. Dividindo a ecuación anterior por α, obtense
a1x + b1y + c1z + d1 + δ(a2x + b2y + c2z + d2) = 0 onde δ =
. Esta ecuación, dando
valores a δ, describe todos os planos do feixe agás a2x + b2y + c2z + d2 = 0 e ten a vantaxe de empregar un único coeficiente.
O feixe de planos facilita a resolución dalgúns problemas, aínda que admitan outros métodos de resolución. Particularmente resulta interesante para achar a ecuación dun plano do que se sabe que contén a unha recta dada polas súas ecuacións implícitas. Exemplo:
Achar a ecuación do plano que contén á recta 2
x = y – 2 =
2
1z e pasa polo punto
(1, 2, –3).
Das ecuacións continuas obtéñense dous planos: 2
x =
2
1z e y – 2 =
2
1z . É dicir:
2x – 2z – 2 = 0 e 2y – z – 5 = 0. Considérase o feixe: 2x – 2z – 2 + δ(2y – z – 5) = 0. Substituíndo na ecuación do feixe as incógnitas polas coordenadas do punto (1, 2, –3), tense: 2·1 – 2·(–3) – 2 + δ(2·2 – (–3) – 5) = 0 ⟹ 6 + 2δ = 0 ⟹ δ = –3.
O plano pedido será: 2x – 2z – 2 – 3(2y – z – 5) = 0 ⟹ 2x – 6y + z + 13 = 0.
7. Posicións relativas de tres planos
Tres planos no espazo π1: a1x + b1y + c1z + d1 = 0, π2: a2x + b2y + c2z + d2 = 0 e π3: a3x + b3y + c3z + d3 = 0 poden adoptar varias posicións que se deducirán da análise do sistema formado polas súas ecuacións. Segundo o teorema de Rouché-Frobenius pódense presentar distintas situacións que se van interpretar xeometricamente.
No sistema
0dzcybxa
0dzcybxa
0dzcybxa
3333
2222
1111
chamaráselle A á matriz dos coeficientes e A á
matriz ampliada e poden aparecer os seguintes casos:
1. Se rango(A) = rango( A ) = 3, o sistema ten solución única. Isto interprétase como que os tres planos córtanse nun punto cuxas coordenadas son a solución do sistema.
2. Se rango(A) = 2 e rango( A ) = 3, o sistema é incompatible, non ten solución; e xeometricamente interprétase como que os tres planos non teñen tres puntos en común. Aínda que pódense dar dúas situacións:
a) Dous planos son paralelos e están cortados polo terceiro.
b) Os planos córtanse de dous en dous, como as caras dunha superficie prismática triangular, determinando tres rectas paralelas.
Estas dúas situacións distínguense unha da outra polos vectores normais aos
planos. No caso a) n
1 e n
2 son paralelos e polo tanto proporcionais, pero n
3 non é paralelo aos anteriores; é dicir, na matriz A hai dúas filas proporcionais. No caso b) cada dous planos definen unha recta, polo que os vectores normais non manteñen

14
entre eles ningunha relación de paralelismo, entón na matriz A non existen dúas filas proporcionais.
3. Se rango(A) = rango( A ) = 2, o sistema posúe infinitas solucións dependentes dun parámetro. Estas solucións constitúen as ecuacións paramétricas dunha recta. Esta recta é o eixe dun feixe de planos ao que pertencen os planos dados.
4. Se rango(A) = 1 e rango( A ) = 2, o sistema volve ser incompatible e interprétase este feito como que os tres planos son paralelos ou que dous son coincidentes e o
terceiro paralelo a eles. Hai dous planos coincidentes se na matriz A aparecen dúas filas proporcionais.
5. Se rango(A) = rango( A ) = 1, os tres planos son coincidentes.
Nos debuxos sinálanse os seis casos anteriores:
Exemplo:
Dados os planos π1: mx + y + z = 1, π2: x + my + z = 1 e π3: x + y + mz = 1, estudar a súa posición relativa para os diferentes valores de m.
Discútese o sistema para os diferentes valores de m:
1mzyx
1zmyx
1zymx
.
Calcúlase o determinante da matriz dos coeficientes:
det(A) =
m11
1m1
11m
= m3 – 3m + 2, m3 – 3m + 2 = 0 ⟹ m = 1 e m = –2
Se m ≠ 1 e m ≠ –2, rango(A) = rango( A ) = 3, o sistema é compatible e determinado. Os tres planos córtanse nun punto.
Se m = 1, rango(A) = rango( A ) = 1, sistema compatible e indeterminado. Os tres
planos son coincidentes. No caso de que m = –2, rango(A) = 2 e rango( A ) = 3,
15
sistema incompatible, examínase a matriz A e non se observa nela dúas filas proporcionais; polo tanto os tres planos córtanse dous a dous formando unha superficie prismática triangular.
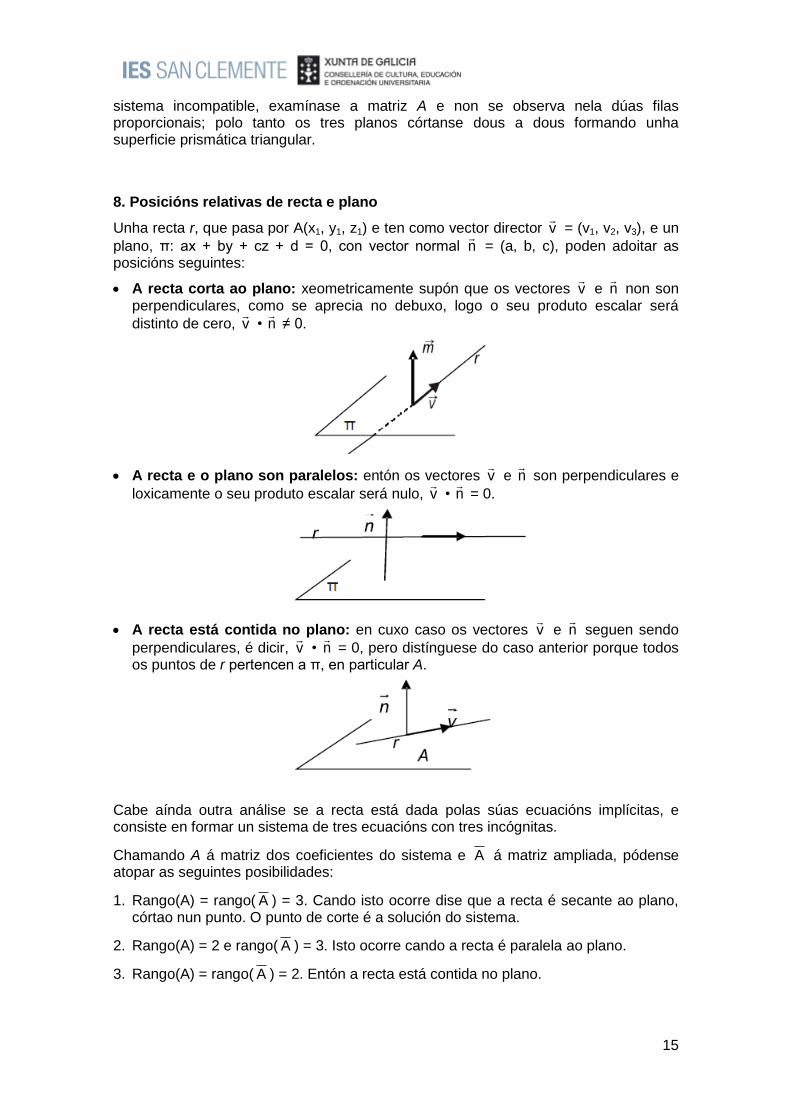
8. Posicións relativas de recta e plano
Unha recta r, que pasa por A(x1, y1, z1) e ten como vector director v
= (v1, v2, v3), e un
plano, π: ax + by + cz + d = 0, con vector normal n
= (a, b, c), poden adoitar as posicións seguintes:
A recta corta ao plano: xeometricamente supón que os vectores v
e n
non son perpendiculares, como se aprecia no debuxo, logo o seu produto escalar será
distinto de cero, v
• n
≠ 0.
A recta e o plano son paralelos: entón os vectores v
e n
son perpendiculares e
loxicamente o seu produto escalar será nulo, v
• n
= 0.
A recta está contida no plano: en cuxo caso os vectores v
e n
seguen sendo
perpendiculares, é dicir, v
• n
= 0, pero distínguese do caso anterior porque todos os puntos de r pertencen a π, en particular A.
Cabe aínda outra análise se a recta está dada polas súas ecuacións implícitas, e consiste en formar un sistema de tres ecuacións con tres incógnitas.
Chamando A á matriz dos coeficientes do sistema e A á matriz ampliada, pódense atopar as seguintes posibilidades:
1. Rango(A) = rango( A ) = 3. Cando isto ocorre dise que a recta é secante ao plano, córtao nun punto. O punto de corte é a solución do sistema.
2. Rango(A) = 2 e rango( A ) = 3. Isto ocorre cando a recta é paralela ao plano.
3. Rango(A) = rango( A ) = 2. Entón a recta está contida no plano.

16
Exemplo:
Estudar a posición relativa da recta (x, y, z) = (–1 + 3λ, 2 + λ, 2λ) e o plano determinado polos puntos A(1, 3, 2), B(2, 0, 1) e C(1, 4, 3). Se se cortan achar o punto de corte. Áchase a ecuación xeral do plano que pasa por A(1, 3, 2) e ten como vectores
paralelos AB = (1, –3, –1) e AC = (0, 1, 1). Esta ecuación obtense igualando a cero o
determinante:
2z11
3y13
1x01
= 0. E resulta o plano: –2x – y + z + 3 = 0.
Áchase o produto escalar do vector normal ao plano, n
= (–2, –1, 1), co vector director
da recta, v
= (3, 1, 2): n
• v
= (–2, –1, 1) • (3, 1, 2) = –5 ≠ 0. Logo a recta e o plano córtanse nun punto. Para achar o punto de corte, substitúense as ecuacións paramétricas da recta na do plano e calcúlase o valor de λ:
–2(–1 + 3λ) – (2 + λ) + 2λ + 3 = 0 ⟹ –5λ + 3 = 0 ⟹ λ = 5
3
Substituíndo nas ecuacións paramétricas da recta o valor de λ atopado, conséguense
as coordenadas do punto de corte: (x, y, z) = (–1 + 3·5
3, 2 +
5
3, 2·
5
3) =
5
6,
5
13,
5
4.
9. Algúns problemas de rectas e planos
Punto simétrico doutro respecto a un punto
Dise que P'(x, y, z) é simétrico de P(x1, y1, z1) con respecto a M(m1, m2, m3) se M é o punto medio do segmento PP'.
Logo m1 = 2
xx1 , m2 = 2
yy1 , m3 = 2
zz1 .
Exemplo:
Achar o punto simétrico de P(4, 3, –1) con respecto a M(2, 4, –3).
Chamando P'(x, y, z) ao simétrico de P con respecto a M, entón:
2 = 2
x4 ⟹ x = 0, 4 =
2
y3 ⟹ y = 5, –3 =
2
z1 ⟹ z = –5
Logo P'(0, 5, –5). Punto simétrico doutro con respecto a unha recta
Dise que P' é simétrico de P con respecto á recta r se hai un punto M de r que é o punto medio do segmento PP'. Exemplo:
Achar o punto simétrico de (2, 0, 3) respecto á recta x – 1 = y – 2 = 2
1z .
Sexa P(2, 0, 3) e P'(x, y, z) o simétrico con respecto á recta dada. Sexa M un punto da recta que é o punto medio do segmento PP'. Procederase cos seguintes pasos:

17
i) Se se pon a recta en paramétricas (x, y, z) = (1 + λ, 2 + λ, 1 + 2λ), o punto M ten de coordenadas (1 + λ, 2 + λ, 1 + 2λ).
Ademais, o vector PM = (1 + λ – 2, 2 + λ – 0, 1 + 2λ – 3) = (–1 + λ, 2 + λ, –2 + 2λ), é
perpendicular ao vector director da recta v
= (1, 1, 2), logo PM • v
= 0:
(–1 + λ, 2 + λ, –2 + 2λ) • (1, 1, 2) = 0 ⟹ –1 + λ + 2 + λ – 4 + 4λ ⟹ 6λ – 3 = 0 ⟹ λ = 2
1
ii) Áchanse as coordenadas de M
11,
2
12,
2
11 =
2,
2
5,
2
3.
iii) Da igualdade
2,
2
5,
2
3 =
2
z3,
2
y0,
2
x2 obtense x = 1, y = 5 e z = 1.
O punto buscado é P'(1, 5, 1). Punto simétrico doutro con respecto a un plano
Dise que P' é simétrico de P con respecto ao plano π se hai un punto M de π que é o punto medio do segmento PP'. Exemplo:
Achar o simétrico do punto P(0, 1, 4) respecto ao plano π: x – 2y + 3z + 4 = 0. Chámase P'(x, y, z) ao simétrico de P(0, 1, 4) respecto a π e procédese cos seguintes pasos. i) Áchase a ecuación da recta r que pasa por P e é perpendicular a π. As ecuacións paramétricas de r: (x, y, z) = (λ, 1 – 2λ, 4 + 3λ). ii) Áchase M, o punto de corte de r e π: λ – 2(1 – 2λ) + 3(4 + 3λ) + 4 = 0⟹λ – 2 + 4λ + 12 + 9λ + 4 = 0⟹14λ + 14 = 0⟹λ = –1 Entón M(–1, 3, 1).
ii) Da igualdade (–1, 3, 1) =
2
z4,
2
y1,
2
x obtense x = –2, y = 5 e z = –2.
O punto P' ten de coordenadas (–2, 5, –2). Recta que corta perpendicularmente a outras dúas que se cruzan
Se r é unha recta que corta perpendicularmente a outras dúas, s e t, que se cruzan, terá o vector director ortogonal aos vectores de dirección de s e t. Exemplo:
Achar a recta r, perpendicular común ás rectas s: x = y = z e t: x = 2
1y =
3
2z .
Se se escriben s e t en paramétricas obtense:
s: (x, y, z) = (λ, λ, λ) e t: (x, y, z) = (μ, 1 + 2μ, –2 + 3μ) Búscase un punto S(λ, λ, λ) de s e outro T(μ, 1 + 2μ, –2 + 3μ) de t tales que o vector
ST = (μ – λ, 1 + 2μ – λ, –2 + 3μ – λ) sexa ortogonal ao vector director de s,
v
= (1, 1, 1), e ao de t, w
= (1, 2, 3). Isto significa que:
ST • v
= 0 ⟹ (μ – λ, 1 + 2μ – λ, –2 + 3μ – λ) • (1, 1, 1) = 0 ⟹
⟹ μ – λ + 1 + 2μ – λ – 2 + 3μ – λ ⟹ 6μ – 3λ – 1 = 0
ST • w
= 0 ⟹ (μ – λ, 1 + 2μ – λ, –2 + 3μ – λ) • (1, 2, 3) = 0 ⟹
⟹ μ – λ + 2 + 4μ – 2λ – 6 + 9μ – 3λ ⟹ 14μ – 6λ – 4 = 0

18
Do sistema
4614
136 obtense μ = 1, λ =
3
5.
Logo S
3
5,
3
5,
3
5 e T(1, 3, 1). A recta que pasa por S e T é a recta buscada:
(x, y, z) =
3
5,
3
5,
3
5 + λ
3
2,
3
4,
3
2
Outra solución pode acharse como intersección de dous planos: un, pasa por S e ten
como vectores paralelos v
e v
x w
, e o outro, pasa por T e ten como vectores
paralelos w
e v
x w
. Recta que pasa por un punto e corta perpendicularmente a outra
Dada unha recta r e un punto P exterior a ela trátase de atopar outra recta que pase por P e corte perpendicularmente a r. Exemplo:
Achar as ecuacións paramétricas da recta que pasa polo punto P(2, –1, 3) e corta
perpendicularmente a r: 2
2x =
2
1y = z.
Escríbese r en paramétricas: (x, y, z) = (2, 1, 0) + λ(2, 2, 1) = (2 + 2λ, 1 + 2λ, λ). Interesa atopar un punto de r, chámaselle R(2 + 2λ, 1 + 2λ, λ), de modo que
PR = (2 + 2λ – 2, 1 + 2λ + 1, λ – 3) = (2λ, 2λ + 2, λ – 3) sexa perpendicular ao vector
director de r, v
= (2, 2, 1).
Se PR • v
= 0, entonces terase:
(2λ, 2λ + 2, λ – 3) • (2, 2, 1) = 4λ + 4λ + 4 + λ – 3 = 0 ⟹ λ = 9
1
Áchanse as coordenadas de R:
9
1,
9
121,
9
122 =
9
1,
9
7,
9
16
A recta que pasa por P e R é a recta pedida:
(x, y, z) = (2, –1, 3) + λ
9
28,
9
16,
9
2
Outro modo de resolvelo é atopar un plano que pasa por P e sexa perpendicular a r. A intersección deste plano coa recta r dá o punto R, e a recta pedida é a que une P e R. Recta que é paralela a outra e corta a outras dúas
Ás veces dise simplemente, achar a recta que é paralela a un vector e corta a outras dúas. Exemplo:
Achar a ecuación da recta que corta ás rectas r: x – 1 = y = z e s:
3z
01yx2 e é
paralela ao vector u
= (–2, 3, –1).

19
A recta r pasa por A(1, 0, 0) e ten vector director v
= (1, 1, 1), e s pode escribirse en paramétricas despexando y e igualando x a μ:
s:
3z
21y
x
, é dicir, pasa por B(0, –1, 3) e ten vector director w
= (1, 2, 0)
Un punto xenérico de r é R(1 + λ, λ, λ) e un punto xenérico de s é S(μ, –1 + 2μ, 3). O
vector RS = (μ – 1 – λ, –1 + 2μ – λ, 3 – λ) é paralelo a u
= (–2, 3, –1).
Logo (μ – 1 – λ, –1 + 2μ – λ, 3 – λ) = α(–2, 3, –1). A igualdade anterior conduce ao sistema:
3
321
21
⟹
3
132
12
cuxa solución é λ = 3
11, μ =
3
10, α =
3
2
Polo tanto, R
3
11,
3
11,
3
14 e S
3,
3
17,
3
10 e a recta que pasa por R e S satisfai o que
se pide: (x, y, z) =
3
11,
3
11,
3
14 + λ
3
2,2,
3
4.
É evidente que o vector
3
2,2,
3
4 é paralelo a u
= (–2, 3, –1).
Hai outro modo de resolvelo coa axuda do feixe de planos. Búscase entre os planos
do feixe de eixe r aquel que sexa paralelo a u
. A intersección deste plano con s dá un
punto dende o cal, e con vector director u
, atópase a recta pedida.
Recta que pasa por un punto e corta a outras dúas
En ocasións este enunciado exprésase dicindo: achar a recta que pasa por un punto e apóiase noutras dúas. Exemplo:
Achar as ecuacións paramétricas da recta que pasa polo punto P(1, 1, 1) e corta ás
rectas r:
21z
2y
1x
e s:
2z
3y
x
.
Pásase r a continuas x – 1 = 1
2y
=
2
1z , igualando a primeira fracción á segunda e
a segunda á terceira obtéñense as ecuacións de dous planos: x + y – 3 = 0 e 2y + z – 5 = 0 que conteñen a r. O feixe de planos de eixe r ten de ecuación: x + y – 3 + δ(2y + z – 5) = 0.
Búscase un no feixe que pase por P(1, 1, 1): 1 + 1 – 3 + δ(2·1 + 1 – 5) = 0 ⟹ δ = 2
1.
Substituíndo δ no feixe e operando, tense: x + y – 3 + 2
1(2y + z – 5) = 0.
Obtense o plano: 2x – z – 1 = 0. O punto de corte deste plano coa outra recta s resulta de substituír as súas ecuacións paramétricas neste plano: 2μ – (2 – μ) – 1 = 0 ⟹ 3μ = 3 ⟹ μ = 1. E agora poñendo μ = 1 descúbrense as coordenadas do punto de corte S(1, 3, 1). A recta pedida pasa por P e S e é: (x, y, z) = (1, 1 + 2λ, 1).
20
O plano que contén a P e a r pódese achar, sen recurrir ao feixe de planos, directamente; e é máis sinxelo.
Tamén é posible resolver o problema achando os planos. Un que contén a P e a r e outro, a P e a s. A intersección deses dous planos dá a ecuación da recta pedida.