metodos cuantitativos para la toma de decisiones.docx
TRANSCRIPT

CAPÍTULO I: FUNDAMENTOS DE METODOS CUANTITATIVOS PARA LA TOMA DE DECISIONES
1.1 Origen y definición
Inicialmente a esta disciplina que ahora indistintamente se le conoce como “Métodos Cuantitativos para la Toma de Decisiones” o “Ciencia de la Administración”, se la denominaba “Investigación de Operaciones”; presumiblemente en razón a la actividad desarrollada por un grupo de científicos de Gran Bretaña, consistente en investigar operaciones militares relativas al análisis de problemas estratégicos y tácticos asociados a la defensa aérea y terrestre del país a fin de optimizar sus recursos militares.
Fueron los norteamericanos, quienes alentados por los logros alcanzados por los ingleses, optaron por desarrollar actividades similares, alcanzando notables progresos metodológicos, extendiendo el campo de acción al ámbito industrial, y con esto, adjudicarse el liderazgo en esta fértil disciplina.
Uno de los aportes más significativos lo dio el matemático norteamericano George Dantzig (1947), al descubrir y desarrollar la técnica ampliamente aceptada como lo es el método simplex para la solución de problemas de programación lineal.
En la actualidad, la aplicación de esta disciplina se extiende no solo al campo empresarial y militar, sino que está cobrando vigencia en las instituciones financieras, hospitales, sistemas de transporte e incluso en estudios de investigación criminológica.
Ensayando una definición podemos decir que, los Métodos Cuantitativos para la Toma de Decisiones constituyen un procedimiento científico que busca proveer las bases más objetivas y cuantitativas que sean posibles, a fin de apreciar mejor los diversos factores o variables que intervienen en un problema, analizar su relación a través de un modelo y encontrar una solución óptima entre varias posibles.
Concepto de Sistema:”Es un conjunto de elementos dinámicamente relacionados en una red de comunicaciones, resultante de la interacción de los elementos, formando una actividad (procesamiento), para alcanzar un objetivo o propósito, operando sobre datos/energía/materia (insumos), en una referencia dada de tiempo (ciclo de actividad del sistema, para suministrar información/energía/materia(resultados o productos del sistema).
1.2 Definición y Construcción del modelo
En general, un estudio de métodos cuantitativos es un proceso de abstracción cuyo resultado es la construcción de un modelo, el cual representa un objeto o aspecto de la vida real (sistema) y cuyo comportamiento queda definido por la estructura y relaciones entre variables que concentran y cuya identificación y simplificación permiten su análisis para el mejoramiento de su funcionamiento (sistema existente), o en su caso, para diversificar su estructura (sistema futuro).
La reducción de variables que controlan el sistema a un número relativamente pequeño de variables dominantes y la abstracción de un modelo del mundo real supuesto, constituye más que una ciencia, un arte, puesto que la validación de un modelo al representar un sistema real se asienta básicamente en la creatividad e imaginación del analista y del equipo con el cual éste trabaja. Es por ello que, no existiendo reglas fijas al respecto, se presenta algunos tipos de modelos que podrían ser de utilidad, tales como:
a) Modelos Icónicos: Que son réplicas de objetos reales, ejemplo: modelo a escala de un avión, maqueta de un complejo habitacional que se proyecta construir, etc.
b) Modelos Analógicos: Tienen forma física pero no tienen el mismo aspecto físico del objeto o situación real al cual representan, ejemplo: velocímetro de un automóvil; la posición de la aguja sobre la carátula representa la velocidad del automóvil, el nivel de mercurio en la escala del termómetro representa la temperatura, la pirámide para representar la distribución de la sociedad en clases, el organigrama empleado para mostrar la estructura orgánica de una empresa, etc.
c) Modelo Probabilístico o estocástico: En el cual, cuando menos un insumo incontrolable es incierto y está sujeto a variación. Es decir, cuando no es posible determinar el valor del resultado, aun cuando se conoce los valores de los insumos controlables, porque se desconocen los valores específicos de los insumos incontrolables, ejemplo: modelo de planeación de la producción en función de la demanda del producto, la cual puede adoptar una serie de valores.
d) Modelo Determinístico: En el cual todos los insumos incontrolables que afectan tanto a la función objetivo como a las restricciones del modelo son conocidos previamente y
Sistema Real Supuesto
Sistema Real
MODELO

no pueden variar, ejemplo: cálculo del impuesto a la renta a partir de la tasa correspondiente aplicable, cálculo del rendimiento sobre la inversión conociendo la tasa de interés y modalidad de éste.
e) Modelo Heurístico o de Simulación: Los cuales imitan el comportamiento del sistema sobre un periodo, especificando ciertos eventos (puntos en el tiempo). La información que mide el funcionamiento del sistema se acumula en informaciones estadísticas, las cuales se actualizan en cuanto cada evento tiene lugar, ejemplo: la simulación de un choque automovilístico a través de la computadora para probar la eficacia de un sistema de seguridad para el conductor.
f) Modelo Simbólico o Matemático: Aquellos que utilizan símbolos matemáticos para representar variables, las cuales están relacionadas mediante las funciones matemáticas apropiadas para describir el comportamiento del sistema o situación real. Este modelo parte del supuesto de que todas las variables relevantes son cuantificables. Entonces la solución del modelo se logra mediante manipulación matemática.Un modelo matemático incluye básicamente los siguientes elementos:
Variables de Decisión (Xj ); son las incógnitas que deben determinarse con la solución del modelo.
Parámetros (aij ); representan las variables controlables del sistema pudiendo ser éstas, probabilísticas o determinísticas.
Restricciones (aij ≤, =, ≥ bi); son las limitantes físicas de las variables de decisión a sus valores factibles o permisibles.
Función Objetivo [F.O.: (MAX) ó (MIN) X0 = Cj Xj )]; Actúa como indicador para el logro de la solución óptima (cuando los valores de las variables de decisión brindan el mejor valor de la función objetivo, satisfaciendo a la vez todas las restricciones, ejm:
F.O.: (MAX) ó (MIN) X0 = C1 X1 + C2 X2 + … + Cn Xn Sujeto a:a11 X1 + a12 X2 + … + a1n Xn ≤, =, ≥ b1 a21 X1 + a22 X2 + … + a2n Xn ≤, =, ≥ b2 . . . . . . . . . .am1 X1 + am2 X2 + … + amn Xn ≤, =, ≥ bn
X1 , X2 , …., Xn ≥ 0
En la formulación anterior, los coeficientes Cj , aij y bi se interpretan físicamente de la siguiente manera:
bi : cantidad disponible del recurso “i”.
aij : Cantidad del recurso “i” que debe asignarse a cada unidad de la actividad “j”.
Cj : Valor (costo, beneficio) por unidad de la actividad “j”.

1.3 Fases de un estudio de métodos cuantitativos
Aún cuando el analista en métodos cuantitativos posea amplio dominio de técnicas de solución y en modelística, es recomendable que el trabajo sea realizado por un equipo de investigación, el cual deberá incluir a éste y a los miembros de la organización cuyas responsabilidades están directamente vinculadas al problema-objeto de estudio; esto, aparte de generar un efecto sinérgico en el grupo, garantiza una eficiente ejecución e implantación de la solución recomendada.
Dependiendo de la naturaleza del problema y del contexto de investigación en el cual éste se encuentra inmerso, puede adoptarse la siguiente secuencia:
a) Definición del problema; lo cual debe efectuarse considerando los siguientes aspectos: Una descripción de la meta u objetivo del estudio, lo cual debe reflejar
aproximadamente el interés total del sistema. Es decir, el problema debe abordarse en forma integral.
Una identificación de las alternativas de decisión del sistema, y; Un reconocimiento de las restricciones y requisitos del sistema.
a) Construcción del modelo; dependiendo de la naturaleza y complejidad del sistema en estudio, deberá decidirse por aquel que mejor se adecúe a éste. Tal modelo deberá especificar relaciones cuantitativas para el objetivo y para las restricciones del problema en función de sus variables de decisión. Si las relaciones matemáticas
DEFINICION DEL PROBLEMA
CONSTRUCCION DEL MODELO
SOLUCION DEL
MODELO
MODELO MODIFICADO
VALIDACION DEL
MODELO
IMPLANTACION DE LOS
RESULTADOS FINALES
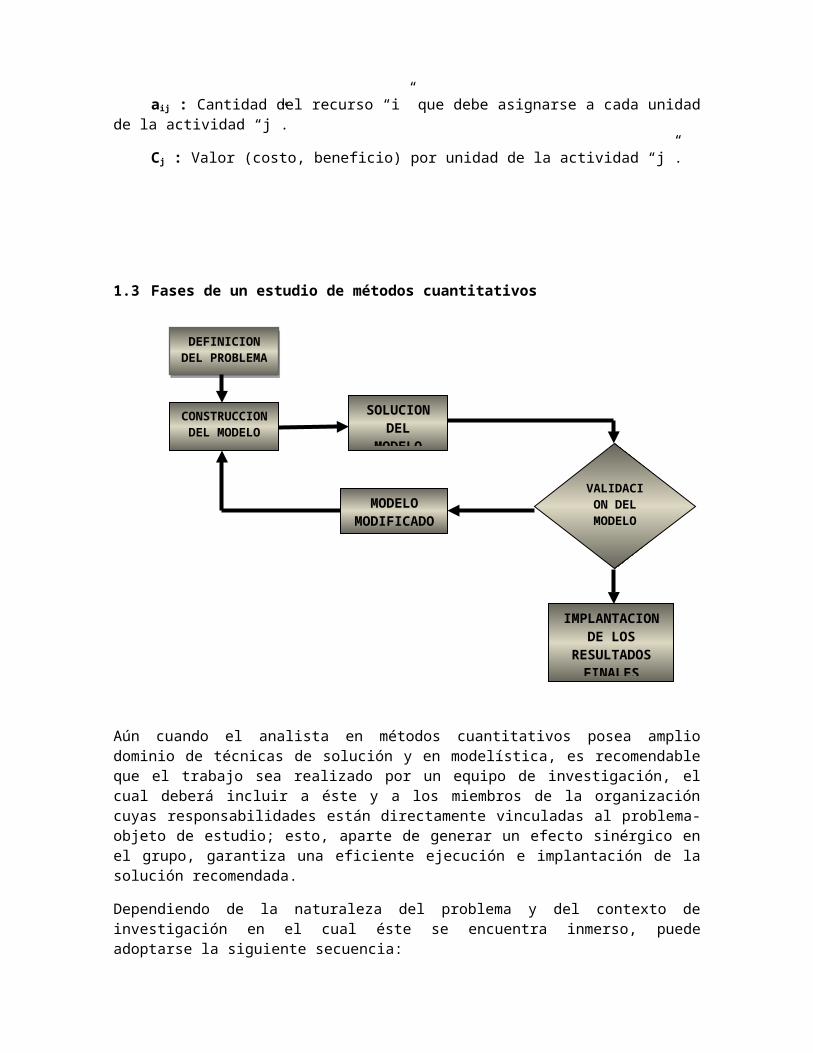
son excesivamente complejas que dificulten su análisis, se puede optar por los modelos heurísticos o de simulación, o la combinación de éstos últimos con los matemáticos.
b) Solución del modelo; En los modelos matemáticos, esto se logra a través de las técnicas de optimización. En casos que se haga uso de los modelos heurísticos el concepto de optimización no está claramente definido por lo que la solución se emplea para obtener evaluaciones aproximadas de las medidas del sistema.Es importante incluir además en esta fase, información referente a los cambios en el comportamiento del sistema debido a la variación de los parámetros (análisis de sensibilidad), lo cual permitirá hacer reajustes en el sistema para mejorar su funcionamiento.
c) Validación del modelo; Un modelo es válido en tanto proporciona elementos confiables de predicción del funcionamiento del sistema. Usualmente esto se resuelve utilizando datos pasados disponibles del sistema. Esto encierra cierta dificultad debido a que no existe certeza de que el funcionamiento futuro del sistema duplique su historia. Por ello, en algunos casos esto se resuelve utilizando datos de corridas de ensayo del sistema. Cabe acotar que el citado método no es apropiado para sistemas que no existen, dado que no se cuenta con datos para la comparación, por lo cual, si el modelo original fuera matemático podría ser factible construir un modelo heurístico para efectuar tal comparación.
d) Implantación de resultados finales; cuya tarea recae en el equipo de investigación. Ello implica la traducción de los resultados probados del modelo en instrucciones específicas y detalladas de operaciones a los individuos que en el futuro administrarán y operarán el sistema. En esta fase es imperativa la cooperación mutua entre el equipo de investigación y los responsables de la administración y operación del sistema.
CAPITULO II: PROGRAMACION LINEAL
2.1 Introducción
La programación lineal es una clase de modelos de programación matemática destinados a la asignación eficiente de los recursos limitados en actividades conocidas, con el objeto de satisfacer las metas deseadas (tal como maximizar beneficios o minimizar costos). La característica distintiva de los modelos de programación lineal es que las funciones que representan el objetivo y las restricciones son lineales.
2.2 Aplicaciones de la programación lineal
En la práctica, la programación lineal ha probado ser uno de los enfoques cuantitativos más exitosos para la toma de decisiones en la administración. Se han reportado numerosas aplicaciones en las industrias química, del aerotransporte, del acero, del papel, del petróleo y en otras. Los problemas específicos que han sido estudiados son diversos e incluyen programación de la producción, selección de medios publicitarios, planeación financiera, presupuestos de capital, transporte, ubicación de plantas, mezcla de productos, asignación de personal, mezclados y muchas otras.
2.3 Definición general de programación lineal
Un modelo de programación lineal, en general, se define como:
F.O.: (MAX) ó (MIN) X0 = C1 X1 + C2 X2 + …+ Cn Xn Sujeto a:a11 X1 + a12 X2 + …+ a1n Xn (≤, = ó ≥) b1 a21 X1 + a22 X2 + …+ a2n Xn (≤, = ó ≥) b2 . . . . . . . . . .am1 X1 + am2 X2 + …+ amn Xn (≤, = ó ≥) bn
X1 , X2 , … Xn ≥ 0
Donde Cj , bi , aij (i=1, 2, …, m); j=1, 2, …, n) son constantes determinadas por la tecnología del problema y Xj son las variables de decisión. Únicamente un signo (≤, = ó ≥) ocurre para cada restricción. No obstante que todas las variables son declaradas no negativas, cada variable irrestricta puede convertirse equivalentemente a variables no negativas. La restricción de no negatividad es esencial para el desarrollo del método de solución para programación lineal.
Los modelos de PL a menudo representan problemas de “asignación” en los cuales los recursos limitados se asignan a un número de actividades. Así, los coeficientes Cj , bi y aij se interpretan físicamente como sigue:Si bi es la cantidad disponible del recurso “i”, entonces aij es la cantidad del recurso “i” que debe asignarse a cada unidad de la actividad “j”. El “valor” por unidad de la actividad “j” es igual a Cj .
Después de formular el modelo, el siguiente paso del análisis es resolver el modelo. Debido a que estos modelos pueden presentarse en las formas (MAX) ó (MIN) para la Función Objetivo

y (≤, = ó ≥) para las restricciones, es necesario modificar estas formas a fin de que se ajusten al procedimiento de solución adecuado. La forma estándar se utiliza directamente para resolver el modelo; la forma canónica es particularmente útil al presentar la teoría de dualidad.
La forma canónica
n(MAX) X0 = Cj Xj
j = 1Sujeto a:
naij Xj ≤ bi , i = 1, 2,…, m j = 1
Xj ≥j = 1, 2,…, n
Las características de esta forma son: Todas las variables de decisión son no negativas. Todas las restricciones son del tipo (menor o igual). La función objetivo es del tipo maximización
Un problema de PL puede expresarse en la forma canónica por el uso de cinco transformaciones elementales:
1. La minimización de una función, f(X), es matemáticamente equivalente a la maximización de la expresión negativa de esta función, - f(X). Por ejemplo, la función lineal:
(MIN) X0 = C1 X1 + C2 X2 + …+ Cn Xn , es equivalente a:
(MAX) g0 = - X0 = - C1 X1 - C2 X2 - …- Cn Xn ; con X0 = g0
2. Una desigualdad puede cambiar su dirección multiplicando ambos lados de la desigualdad por -1. Por ejemplo, la restricción lineal:
a1 X1 + a1 X1 ≥ b es equivalente a: - a1 X1 - a1 X1 ≤ - b
3. Una ecuación puede ser reemplazada por dos desigualdades en direcciones opuestas. Por ejemplo:
a1 X1 + a1 X1 = b ; es equivalente a las dos restricciones simultaneas:
a1 X1 + a1 X1 ≤ b y a1 X1 + a1 X1 ≥ b
4. Una restricción de desigualdad con su lado izquierdo en la forma de valor absoluto puede cambiarse a dos desigualdades regulares. Por consiguiente, para b ≥ 0;

a│ 1 X1 + a1 X1 ≤ b; es equivalente a:│
a1 X1 + a1 X1 ≤ b y a1 X1 + a1 X1 ≥ - b
De igual manera, para b ≥ 0;
a│ 1 X1 + a1 X1 ≥ b; es equivalente a:│a1 X1 + a1 X1 ≥ b ó a1 X1 + a1 X1 ≤ - b
5. Una variable que es irrestricta en signo (esto es, positiva, negativa o cero) es equivalente a la diferencia entre dos variables no negativas. Por consiguiente si X es irrestricta en signo puede reemplazarse por ( X+ - X- ) donde X+ ≥ 0 y X- ≥ 0.
Ejemplo:Considere el problema de programación lineal:
(MIN) X0 = 3X1 - 3X2 + 7X3 Sujeto a:
X1 + X2 + 3X3 ≤ 40 X1 + 9X2 - 7X3 ≥ 505X1 + 3X2 = 20 5X│ 2 + 8X3 ≤ 100│
X1 , X2 ≥ 0; X3 es irrestricta en signo
Efectuando las transformaciones elementales el PL se expresa en su forma canónica como sigue:
(MAX) g0 = - ( X0 ) = -3X1 + 3X2 - 7 ( X3+ - X3
- )Sujeto a:
X1 + X2 + 3 ( X3+ - X3
- ) ≤ 40 - X1 - 9X2 + 7 ( X3
+ - X3- ) ≤ -50
5X1 + 3X2 ≤ 20 -5X1 - 3X2 ≤ -20
5X2 + 8 ( X3+ - X3
- ) ≤ 100 - 5X2 - 8 ( X3
+ - X3- ) ≤ 100
X1, X2, X3+ , X3
- ≥ 0

La forma estándar
n(MAX) X0 = Cj Xj
j = 1Sujeto a:
naij Xj + Si = bi , i = 1, 2,…, m j = 1
Xj ≥ 0, j = 1, 2,…, n
Si ≥ 0, i = 1, 2,…, mLas características de la forma estándar son:
Todas las restricciones son ecuaciones excepto la restricción de no negatividad que permanece como desigualdad (≥ 0).
Los elementos del lado derecho (bi) de cada ecuación son no negativos. Todas las variables son no negativas. La función objetivo es del tipo (MAX) ó (MIN).
Las restricciones de desigualdad pueden cambiarse a ecuaciones introduciendo (sumando o restando) en el lado izquierdo de cada una de tales restricciones una variable no negativa. Estas nuevas variables se conocen como variables de holgura. Estas últimas deberán incluirse tanto en la función objetivo como en las restricciones con coeficiente cero a fin de no alterar el modelo original.Tomando como referencia el modelo anterior, este quedaría expresado en su forma estándar como sigue:
(MAX) g0 = - ( X0 ) = -3X1 + 3X2 - 7 ( X3+ - X3
- ) + 0S1 + 0S2 +0S3 +0S4 +0S5 +0S6 Sujeto a:
X1 + X2 + 3 ( X3+ - X3
- ) + S1 = 40 X1 + 9X2 - 7 ( X3
+ - X3- ) - S2 = 50
5X1 + 3X2 + S3 = 20 5X1 + 3X2 - S4 = 20 5X2 + 8 ( X3
+ - X3- ) + S5 = 100
- 5X2 - 8 ( X3+ - X3
- ) + S6 = 100
X1 , X2 , X3+ , X3
- , S1 , S2 , S3 , S4 , S5 , S6 ≥ 0
2.4 FORMULACION DEL PROBLEMA (PLANTEAMIENTO)
La optimización basada en programación lineal corresponde a situaciones reales en las que se pretende identificar y resolver dificultades para aumentar la productividad respecto a los recursos (principalmente los limitados y costosos), aumentando así los beneficios.

Los resultados y el proceso de optimización se convierten en un respaldo cuantitativo de las decisiones frente a las situaciones planteadas. Decisiones en las que sería importante tener en cuenta diversos criterios administrativos como:
Los hechos La experiencia La intuición La autoridad
Ejemplo 1:
La Cia. Par Inc., es un pequeño fabricante de equipo y accesorios para golf cuyos administradores han decidido incursionar en el mercado de las bolsas para bastones de golf hechas de piel, a precios mediano y alto. El distribuidor de Par está muy entusiasmado con la nueva línea de productos y ha aceptado comprar todas las bolsas de golf que fabrique Par en los tres meses siguientes. Después de una investigación cuidadosa de las etapas necesarias para fabricar una bolsa, los administradores determinan que cada bolsa que se fabrique requerirá de las siguientes operaciones:
1. Cortar y teñir el material2. Coser3. Terminar (insertar el portasombrilla, los pasadores de los palos, etc.)4. Inspeccionar y embalar
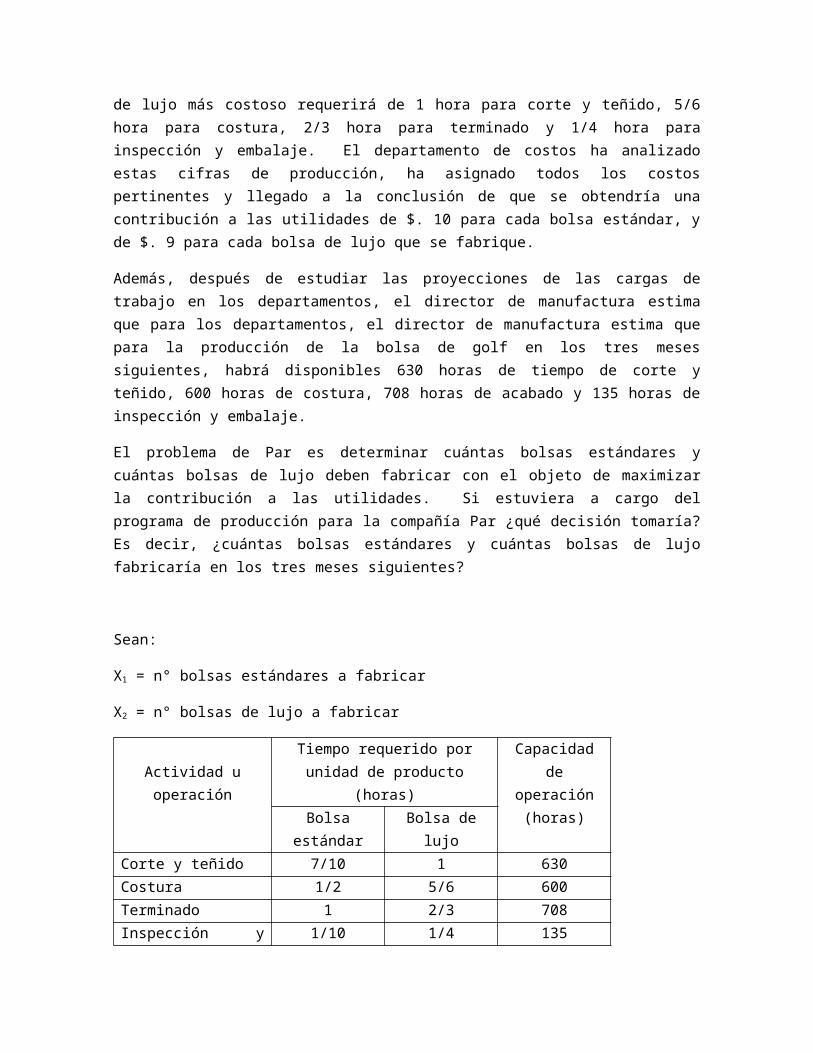
El director de manufactura ha analizado cada una de las operaciones y llegado a la conclusión de que si la compañía fabrica un modelo estándar de precio medio se requerirá 7/10 de hora en el departamento de corte y teñido, 1/2 hora en el departamento de costura, 1 hora en el departamento de terminado, y 1/10 hora en el departamento de inspección y embalaje. El modelo de lujo más costoso requerirá de 1 hora para corte y teñido, 5/6 hora para costura, 2/3 hora para terminado y 1/4 hora para inspección y embalaje. El departamento de costos ha analizado estas cifras de producción, ha asignado todos los costos pertinentes y llegado a la conclusión de que se obtendría una contribución a las utilidades de $. 10 para cada bolsa estándar, y de $. 9 para cada bolsa de lujo que se fabrique.
Además, después de estudiar las proyecciones de las cargas de trabajo en los departamentos, el director de manufactura estima que para los departamentos, el director de manufactura estima que para la producción de la bolsa de golf en los tres meses siguientes, habrá disponibles 630 horas de tiempo de corte y teñido, 600 horas de costura, 708 horas de acabado y 135 horas de inspección y embalaje.
El problema de Par es determinar cuántas bolsas estándares y cuántas bolsas de lujo deben fabricar con el objeto de maximizar la contribución a las utilidades. Si estuviera a cargo del programa de producción para la compañía Par ¿qué decisión tomaría? Es decir, ¿cuántas bolsas estándares y cuántas bolsas de lujo fabricaría en los tres meses siguientes?

Sean:
X1 = n° bolsas estándares a fabricar
X2 = n° bolsas de lujo a fabricar
Actividad u operaciónTiempo requerido por unidad de
producto (horas)Capacidad de
operación (horas)Bolsa estándar Bolsa de lujo
Corte y teñido 7/10 1 630Costura 1/2 5/6 600Terminado 1 2/3 708Inspección y embalaje 1/10 1/4 135Utilidad ($.) 10 9
Contribución total a las utilidades (Z)
Como el objetivo (maximizar la contribución total de utilidades) es función de sus variables de decisión (X1 , X2 ), a 10X1 + 9X2 se le denomina función objetivo (F.O.), quedando planteado el objetivo de la siguiente manera:
F.O.: (MAX)Z = 10X1 + 9X2
Cualquier combinación específica de fabricación de artículos de tipo estándar y de lujo se le designa por solución del problema. Sin embargo sólo aquellas soluciones que satisfacen todas las restricciones se les denomina soluciones factibles. La combinación factible específica que aporta la mayor utilidad se la denomina solución óptima. Para determinar las soluciones factibles es necesario identificar las restricciones del problema, así:
Tiempo total requerido de corte y teñido = 7/10 X1 + X2 ; lo cual denota que el número de horas que se utilicen para las operaciones de corte y teñido en la fabricación de X1 bolsas estándares y X2 bolsas de lujo deberá ser menor o igual que la cantidad máxima de tiempo disponible para corte y teñido.
Para las demás operaciones se procede del mismo modo. Dado que no es posible fabricar un número negativo de bolsas estándares o de lujo y a fin de que las variables de decisión no asuman valores negativos, debe añadirse dos restricciones:
X1 ≥ 0
X2 ≥ 0
ó en forma abreviada: X1 , X2 ≥ 0 (restricciones de no negatividad), con lo cual queda el problema completo queda planteado de la siguiente manera:

F.O.: (MAX)Z = 10X1 + 9X2
Sujeto a:
Corte y teñido: 7/10 X1 + X2 ≤ 630
Costura: 1/2 X1 + 5/6 X2 ≤ 600
Terminado: X1 + 2/3 X2 ≤ 708
Inspección y embalaje: 1/10 X1 + 1/4 X2 ≤ 135
X1 , X2 ≥ 0
Ejemplo 2:
Se procesan cuatro productos sucesivamente en dos máquinas. Los tiempos de manufactura en horas por unidad de cada producto se tabulan a continuación para dos máquinas:
MAQUINA TIEMPO POR UNIDAD (HORAS)
PROD. 1 PROD. 2 PROD. 3 PROD. 4
1
2
2
3
3
2
4
1
2
2
El costo total de producir una unidad de cada producto está basado directamente en el tiempo de máquina. Suponga que los costos por hora para las máquinas 1 y 2 son $. 10 y $. 15. Las horas totales presupuestadas para todos los productos en las máquinas 1 y 2 son 500 y 380. Si el precio de venta por unidad para los productos 1, 2, 3 y 4 es $. 65, $. 70, $. 55 y $. 45. Formule el problema como un modelo de programación lineal para maximizar el beneficio neto total.
Solución:
Sean:
X1, X2, X3, X4 = n° de unidades producidas de los productos 1, 2, 3 y 4.

Se tiene:
MAQUINA
12
TIEMPO POR UNIDAD (HORAS)CAPADIDAD DE
OPERACIÓN(HORA)
COSTO HORA MAQUINA
($)
PROD. 123
PROD. 232
PROD. 341
PROD. 422
500380
1015
INGRESO UNITARIO
POR VENTA ($)
65 70 55 45
CONDICION DE CAPACIDAD:
MAQUINA 1: 2X1 + 3X2 + 4X3 + 2X4 ≤ 500
MAQUINA 2: 3X1 + 2X2 + 1X3 + 2X4 ≤ 380
FUNCION OBJETIVO: F.O.: UTILIDAD = INGRESOS – COSTOS
UTILIDAD = 65X1 + 70X2 + 55X3 + 45X4 - [10 (2X1 + 3X2 + 4X3 + 2X4) + 15 (3X1 + 2X2 + 1X3 + 2X4)]
UTILIDAD = 10X2 - 5X4
Luego: F.O.: (MAX) U = 10X2 - 5X4
Sujeto a:MAQUINA 1: 2X1 + 3X2 + 4X3 + 2X4 ≤ 500MAQUINA 2: 3X1 + 2X2 + 1X3 + 2X4 ≤ 380R.N.N.: X1 , X2 , X3 , X4 ≥ 0
Ejemplo 3:
Un granjero desea determinar la mezcla óptima para un lote diario de alimentos de 100 kg de manera tal que satisfaga los requerimientos nutritivos para sus animales; siendo éstos:
Al menos 0.8% pero no más de 1.2% de Calcio Al menos 22% de Proteínas A lo más 5% de Fibras Crudas
Se sabe además de que los ingredientes de que éste dispone tienen el siguiente contenido nutritivo:
INGREDIENTES Kgs por Kg de INGREDIENTE COSTO por Kg ($)
CALCIO PROTEINAS FIBRA
PIEDRA CALIZAMAÍZ
ALIMENTO DE SOYA
0.38000.00100.0020
0.00000.09000.5000
0.00000.02000.0800
0.01640.04630.1250
Formule el problema como un modelo de programación lineal para minimizar el costo neto total.
Solución:
Sean: X1 = n° kg de Piedra Caliza a comprar
X1 = n° kg de Maíz a comprar
X1 = n° kg de Alimento de Soya a comprar
Luego: F.O.: (MIN) C = 0.0164X1 + 0.0463X2 + 0.1250X3
Sujeto a:
TAMAÑO DEL LOTE: X1 + X2 + X3 = 100 REQUERIMIENTOS NUTRITIVOS:CALCIO: 0.3800X1 + 0.0010X2 + 0.0020X3 ≤ 1.20/100X100
0.3800X1 + 0.0010X2 + 0.0020X3 ≥ 0.80/100X100PROTEÍNAS: 0.0900X2 + 0.5000X3 ≥ 22/100X100FIBRA: 0.0200X2 + 0.0800X3 ≤ 5/100X100R.N.N.: X1, X2, X3 ≥ 0
Ejemplo 4:
Una fábrica de automóviles y camiones consta de los departamentos que a continuación se enumeran:
Dpto. 1 : Estampado de planchas metálicas
Dpto. 2: Armado de motores
Dpto. 3: Montaje de automóviles
Dpto. 4: Montaje de camiones

El departamento 1 puede estampar por mes las planchas necesarias para 25,000 automóviles o 35,000 camiones, o las correspondientes combinaciones de automóviles y camiones. El departamento 2 puede armar por mes 33,333 motores de automóviles o 16,667 motores de camión, o las correspondientes combinaciones de automóviles y camiones. El departamento 3 puede montar y terminar 22,500 automóviles y 15,000 camiones el departamento 4. Si cada automóvil deja una utilidad de $. 300 y cada camión $. 250. ¿Qué cantidad de automóviles y camiones deben producirse de manera que las utilidades que se obtengan sean las máximas posibles?
Solución:
Sean: X1 = n° automóviles a producir
X2 = n° camiones a producir
F.O.: (MAX) U = 300X1 + 250X2
RESTRICCIONES DE CAPACIDAD:
Dpto. 1: Asumiendo que la capacidad total de este departamento es 100% = 100/100 = 1; se tiene:
25,000 automóviles ________________ 1 (Capacidad total)
X1 automóviles________________ ?
___________________________________________________________________
? = X1 / 25,000 (Capacidad del Dpto. 1 empleada en automóviles)
35,000 camiones ________________ 1 (Capacidad total)
X2 camiones ________________ ?
___________________________________________________________________
? = X2 / 35,000 (Capacidad del Dpto. 1 empleada en automóviles)
∴ Capacidad empleada en automóviles + Capacidad empleada en camiones = Capacidad total
Capacidad Dpto. 1: X1 / 25,000 + X2 / 35,000 ≤ 1
Siguiendo el mismo razonamiento para los demás departamentos y resumiendo, se tiene:
F.O.: (MAX) U = 300X1 + 250X2
Sujeto a:
RESTRICCIONES DE CAPACIDAD:
Capacidad Dpto. 1: X1 / 25,000 + X2 / 35,000 ≤ 1
Capacidad Dpto. 2: X1 / 33,333 + X2 / 16,667 ≤ 1

Capacidad Dpto. 3: X1 / 22,500 ≤ 1
Capacidad Dpto. 3: X2 / 15,000 ≤ 1
RN.N.: X1, X2 ≥ 0
Ejemplo 5:
Se procesan tres productos a través de tres operaciones diferentes. Los tiempos (en minutos) requeridos por unidad de cada producto, la capacidad diaria de las operaciones (en minutos por día) y el beneficio por unidad vendida de cada producto (en dólares) son como sigue:
OPERACION
TIEMPO POR UNIDAD (minutos)
CAPACIDAD DE
OPERACIÓN (minutos/día)
Prod. 1 Prod. 2 Prod. 3
123
131
204
120
430460420
GANANCIA ($.)
3 2 5
a. Determinar la producción diaria óptima para los tres productos que maximice el beneficio (Z).
b. Supongamos que un cuarto producto debe fabricarse en las mismas operaciones. Los tiempos por unidad en las tres operaciones son 3, 5 y 1. El beneficio por unidad es igual a $. 6. Vuelva a formular el modelo de programación lineal si además debe utilizarse la capacidad total de la operación 3. ¿Cómo cambiaría esto la formulación?
c. En el problema original, suponga que la suma de las capacidades no utilizadas de las tres operaciones no deben exceder de 10 minutos por día. Muestre como ésta restricción puede ser implantada en la formulación.
d. Suponga además que un estudio de mercado indica que la relación del número de unidades del producto 1 al número de unidades del producto 2 y 3 debe ser al menos igual a 0.4. Muestre como esta restricción puede ser tomada en cuenta en la formulación del problema original.
Solución:
a) Solución:Sean: X1 , X2 , X3 = n° unidades de los productos 1, 2, 3 a producir
F.O.: (MAX) Z = 3X1 + 2X2 + 5X3

Sujeto a:Operación 1: X1 + 2X2 + X3 ≤ 430Operación 2: 3X1 + 2X3 ≤ 460Operación 3: X1 + 4X2 ≤ 420X1 , X2 , X3 ≥ 0
b) Solución:
Operación Tiempo por unidad (minutos) Capacidad de operación
(minutos/día)Prod. 1 Prod. 2 Prod. 3 Prod. 4
123
131
204
120
351
430460420
Ganancia por unidad
($)
3 2 5 6
Sean: X1 , X2 , X3 , X4 = n° unidades de los productos 1, 2, 3, 4 a producir
F.O.: (MAX) Z = 3X1 + 2X2 + 5X3 + 6X4 Sujeto a:Operación 1: X1 + 2X2 + X3 + 3X4 ≤ 430Operación 2: 3X1 + 2X3 + 5X4 ≤ 460Operación 3: X1 + 4X2 + X4 = 420X1 , X2 , X3 , X4 ≥ 0
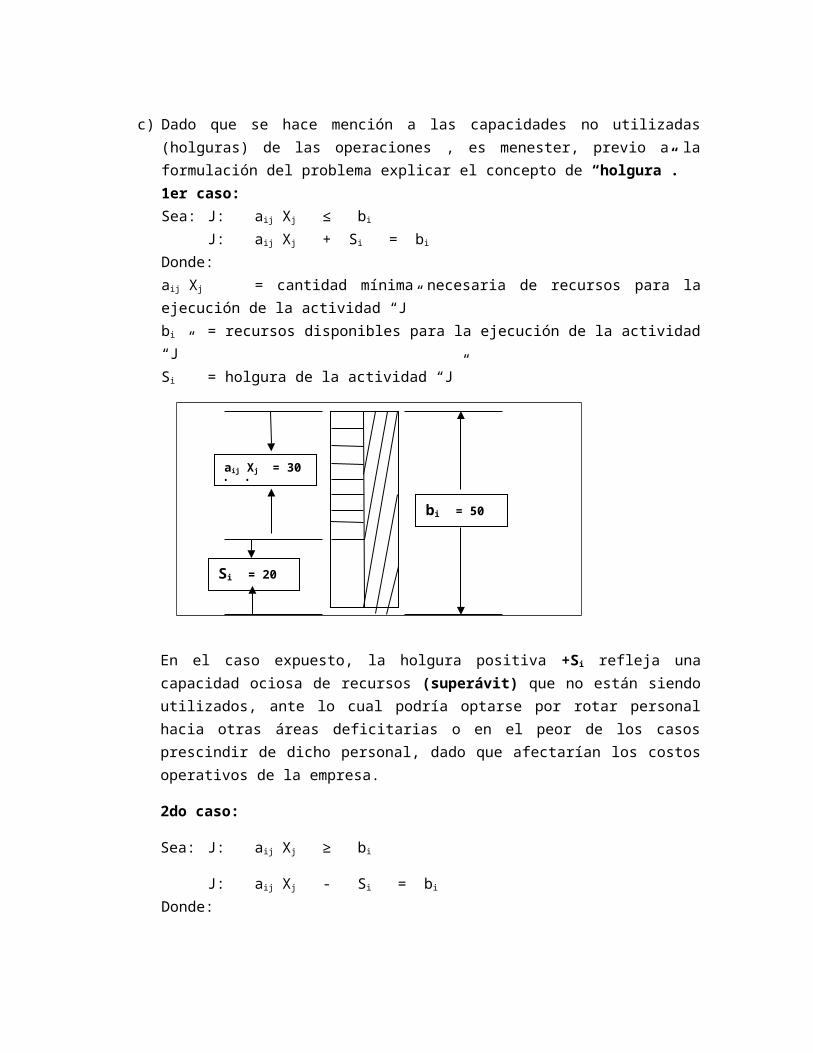
c) Dado que se hace mención a las capacidades no utilizadas (holguras) de las operaciones , es menester, previo a la formulación del problema explicar el concepto de “holgura”.1er caso:Sea: J: aij Xj ≤ bi
J: aij Xj + Si = bi Donde: aij Xj = cantidad mínima necesaria de recursos para la ejecución de la actividad “J”bi = recursos disponibles para la ejecución de la actividad “J”Si = holgura de la actividad “J”

En el caso expuesto, la holgura positiva +Si refleja una capacidad ociosa de recursos (superávit) que no están siendo utilizados, ante lo cual podría optarse por rotar personal hacia otras áreas deficitarias o en el peor de los casos prescindir de dicho personal, dado que afectarían los costos operativos de la empresa.
2do caso:
Sea: J: aij Xj ≥ bi
J: aij Xj - Si = bi Donde: aij Xj = cantidad mínima necesaria de recursos para la ejecución de la actividad “J”bi = recursos disponibles para la ejecución de la actividad “J”Si = holgura de la actividad “J”
En el presente caso, la holgura negativa -Si refleja una falta de recursos (déficit) que de no asignarse, dicha actividad no podría concretarse, paralizándose temporalmente el proceso productivo y pudiendo desencadenar colateralmente otros malestares de orden social y económico.
bi = 50 hr-h
aij Xj = 30 hr-h
Si = 20 hr-h
bi = 30 hr-h
aij Xj = 50 hr-h
Si = 20 hr-h

3er caso:
Sea: J: aij Xj = bi
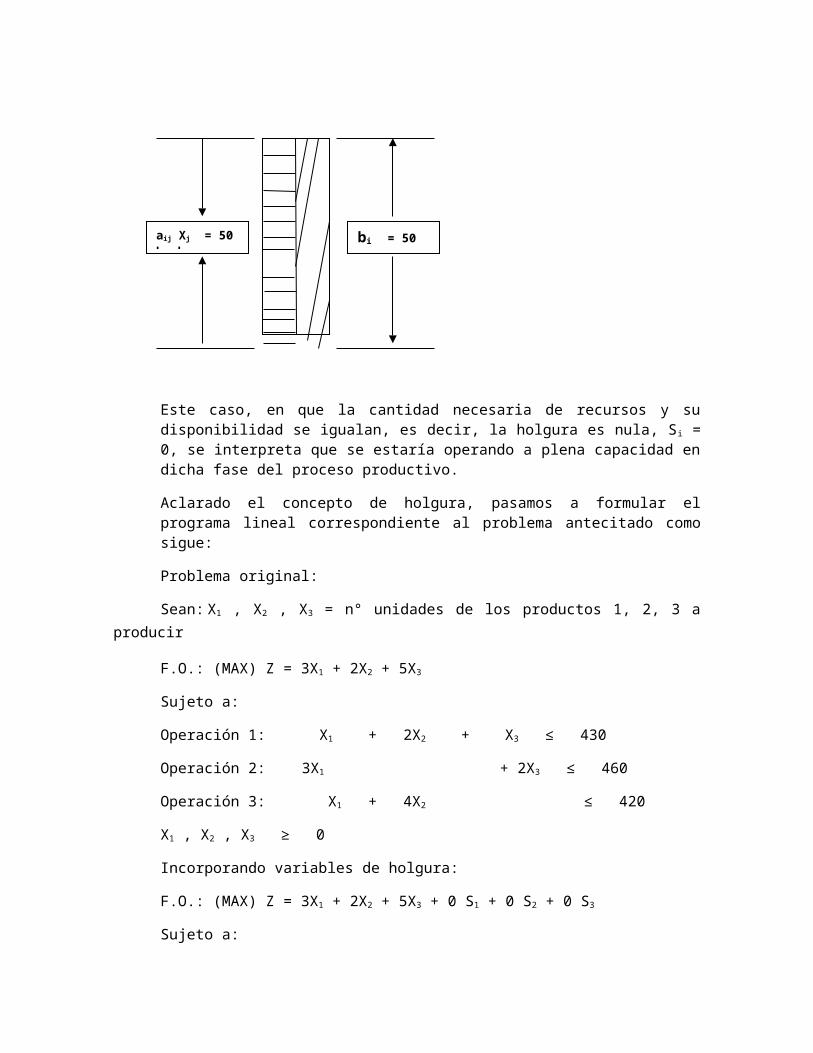
J: aij Xj ± Si = bi ; Si = 0Donde: aij Xj = cantidad mínima necesaria de recursos para la ejecución de la actividad “J”bi = recursos disponibles para la ejecución de la actividad “J”Si = holgura de la actividad “J”
Este caso, en que la cantidad necesaria de recursos y su disponibilidad se igualan, es decir, la holgura es nula, Si = 0, se interpreta que se estaría operando a plena capacidad en dicha fase del proceso productivo.
Aclarado el concepto de holgura, pasamos a formular el programa lineal correspondiente al problema antecitado como sigue:
Problema original:
Sean: X1 , X2 , X3 = n° unidades de los productos 1, 2, 3 a producir
F.O.: (MAX) Z = 3X1 + 2X2 + 5X3
Sujeto a:
Operación 1: X1 + 2X2 + X3 ≤ 430
Operación 2: 3X1 + 2X3 ≤ 460
Operación 3: X1 + 4X2 ≤ 420
bi = 50 hr-haij Xj = 50 hr-h

X1 , X2 , X3 ≥ 0
Incorporando variables de holgura:
F.O.: (MAX) Z = 3X1 + 2X2 + 5X3 + 0 S1 + 0 S2 + 0 S3
Sujeto a:
Operación 1: X1 + 2X2 + X3 + S1 = 430
Operación 2: 3X1 + 2X3 + S2 = 460
Operación 3: X1 + 4X2 + S3 = 420
X1 , X2 , X3 , S1 , S2 , S3 ≥ 0
Donde: S1 , S2 , S3 = capacidades no utilizadas
Despejando, se tiene:
S1 = 430 - X1 - 2X2 - X3 (I)
S2 = 460 - 3X1 - 2X3 (II)
S3 = 420 - X1 - 4X2 (III)
(I) + (II) + (III):
S1 + S2 + S3 = 1310 - 5X1 - 6X2 - 3X3 (IV)
Pero: S1 + S2 + S3 ≤ 10 (V)
Luego:
Reemplazando (V) en (IV) y multiplicando por (-1), se tiene:
1310 - 5X1 - 6X2 - 3X3 ≤ 10 (-1)
5X1 + 6X2 + 3X3 ≥ 1300
Finalmente, incorporando esta restricción al modelo original:
F.O.: (MAX) Z = 3X1 + 2X2 + 5X3
Sujeto a:
Operación 1: X1 + 2X2 + X3 ≤ 430
Operación 2: 3X1 + 2X3 ≤ 460
Operación 3: X1 + 4X2 ≤ 420
Condición de capacidad ociosa: 5X1 + 6X2 + 3X3 ≥ 1300
X1 , X2 , X3 ≥ 0
d) Solución:
Pauta de producción: X1 / X1 + X2 ≥ 0.4
X1 ≥ 0.4X2 + 0.4X3
X1 - 0.4X2 - 0.4X3 ≥ 0
Incluyendo ésta restricción en el problema original:
F.O.: (MAX) Z = 3X1 + 2X2 + 5X3
Sujeto a:
Operación 1: X1 + 2X2 + X3 ≤ 430
Operación 2: 3X1 + 2X3 ≤ 460
Operación 3: X1 + 4X2 ≤ 420
Pauta de producción: X1 - 0.4X2 - 0.4X3 ≥ 0
X1 , X2 , X3 ≥ 0

EJERCICIOS PROPUESTOS
1. Supóngase que el Banco de Crédito al Campesino, tiene dos planes de inversión: el primero en el programa de tierras de riego y el segundo en el programa de tierras de temporal. El primer programa regresa un 30% de la inversión anualmente, mientras que el segundo plan regresa un 65% de la inversión, pero al término de dos años. Los intereses recibidos en ambos planes son reinvertidos de nuevo en cualquiera de ambos planes. Formule el programa lineal que le permita al Banco maximizar la inversión total en un sexenio, si la inversión anual es de $. 100,000.
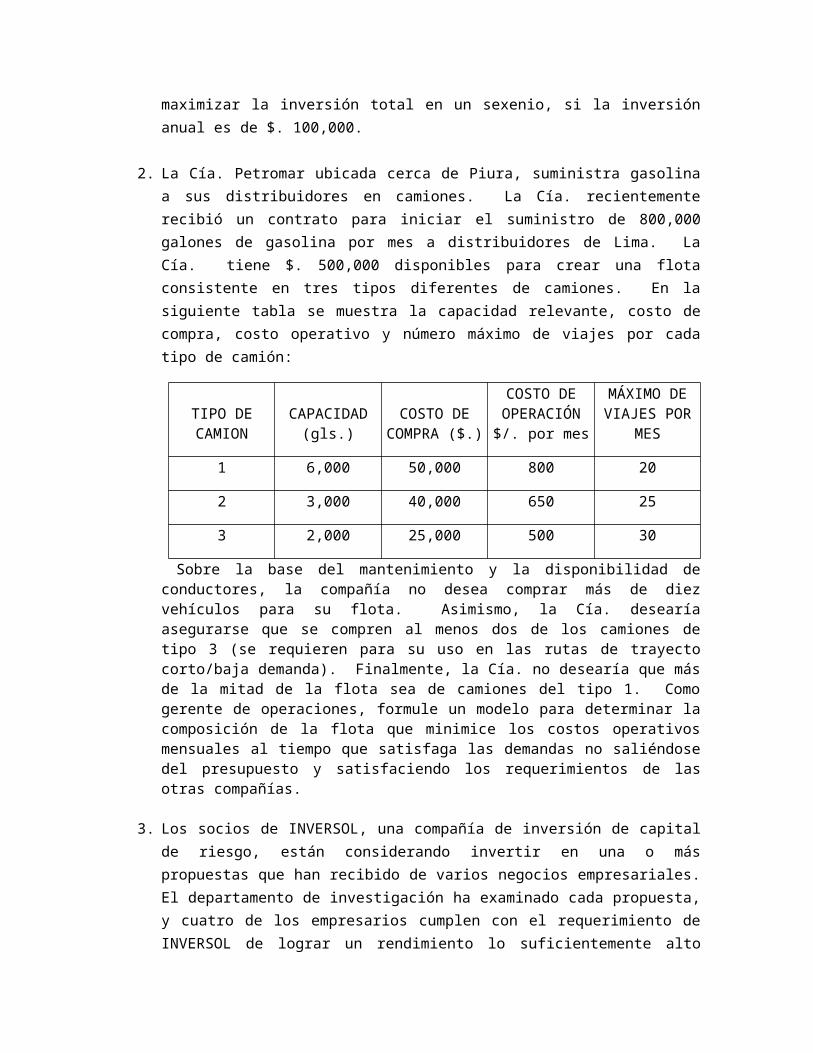
2. La Cía. Petromar ubicada cerca de Piura, suministra gasolina a sus distribuidores en camiones. La Cía. recientemente recibió un contrato para iniciar el suministro de 800,000 galones de gasolina por mes a distribuidores de Lima. La Cía. tiene $. 500,000 disponibles para crear una flota consistente en tres tipos diferentes de camiones. En la siguiente tabla se muestra la capacidad relevante, costo de compra, costo operativo y número máximo de viajes por cada tipo de camión:
TIPO DE CAMION
CAPACIDAD (gls.)
COSTO DE COMPRA ($.)
COSTO DE OPERACIÓN $/. por mes
MÁXIMO DE VIAJES POR
MES
1 6,000 50,000 800 20
2 3,000 40,000 650 25
3 2,000 25,000 500 30
Sobre la base del mantenimiento y la disponibilidad de conductores, la compañía no desea comprar más de diez vehículos para su flota. Asimismo, la Cía. desearía asegurarse que se compren al menos dos de los camiones de tipo 3 (se requieren para su uso en las rutas de trayecto corto/baja demanda). Finalmente, la Cía. no desearía que más de la mitad de la flota sea de camiones del tipo 1. Como gerente de
operaciones, formule un modelo para determinar la composición de la flota que minimice los costos operativos mensuales al tiempo que satisfaga las demandas no saliéndose del presupuesto y satisfaciendo los requerimientos de las otras compañías.
3. Los socios de INVERSOL, una compañía de inversión de capital de riesgo, están considerando invertir en una o más propuestas que han recibido de varios negocios empresariales. El departamento de investigación ha examinado cada propuesta, y cuatro de los empresarios cumplen con el requerimiento de INVERSOL de lograr un rendimiento lo suficientemente alto para el riesgo asociado. Estas compañías son: TELE-MM, CEMENTOS BETA, EPSILÓN Y MINSUR. El departamento de investigación de de INVERSOL ha estimado el rendimiento total así como las inversiones al principio de cada uno de los siguientes cuatro años (en dólares actuales). El departamento de contabilidad ha estimado los fondos totales que INVERSOL tiene para invertir a principio de cada uno de los cuatro años. Observe que los fondos no usados de cualquier año no están disponibles para su inversión en los años posteriores. Asimismo, por acuerdo de los socios se ha decidido no invertir conjuntamente en CEMENTOS BETA y EPSILÓN. Formule el modelo que maximice el rendimiento total de las inversiones.
4. Una fábrica de papel recibió tres pedidos de rollos de papel con los anchos y longitudes indicadas en la tabla siguiente:
PEDIDO n° ANCHURA(pies)
LONGITUD (pies)
1 5 10,000
2 7 30,000
3 9 20,000
Los rollos se producen en la fábrica con dos anchos estándar: 10’ y 20’ (pies), los cuales hay que recortar a los tamaños especificados por los pedidos. No existe límite sobre la longitud de los rollos estándar ya que para propósitos prácticos los rollos de longitud limitada pueden unirse para proporcionar las longitudes requeridas. El objetivo es determinar el esquema de producción (modelo de corte) que minimice la pérdida por ajuste y satisfaga la demanda dada.
5. El fundo “El Dorado” cuenta con 50 acres de tierra disponibles para la siembra de maíz, soya, lechuga, algodón y brócoli. La siguiente tabla muestra la información relevante perteneciente producción, el costo de plantación, el precio de venta y los requerimientos de agua para cada cultivo.
CULTIVO PRODUCCIÓN (kg/acre)
COSTO ($/ kg)
PRECIO DE VENTA ($/k7g)
AGUA REQUERIDA

(litros/kg)
Maíz 640 1.00 1.70 8.75
Frijol de soya
500 0.5 1.30 5.00
Lechuga 400 0.4 1.00 2.25
algodón 300 0.25 1.00 4.25
Brócoli 350 0.60 1.30 3.50
Para la próxima temporada, hay 100,000 litros de agua disponibles y “El Dorado” ha contratado vender al menos 5,120 kg de maíz. Formule un programa lineal para determinar una estrategia de plantación óptima para “El Dorado”.
6. Al gerente de AFP “PROFUTURO” se le pide invertir $. 1’000,000 del Fondo de Pensiones de sus afiliados. El departamento de investigación de inversiones ha identificado seis fondos mutuos con estrategias de inversiones variables, resultando en diferentes rendimientos potenciales y riesgos asociados como se resume en la tabla siguiente:
RIESGO Y TASA DE RENDIMIENTO DE SEIS FONDOS DE INVERSIÓN
FONDO 1 FONDO 2 FONDO 3 FONDO 4 FONDO 5 FONDO 6
PRECIO ($/Acción) 45 76 110 17 23 22
DEVOLUCIÓN ESPERADA (%)
30 20 15 12 10 7
CATEGORÍA DE RIESGO
Alto Alto Alto Mediano Mediano Bajo
Una forma de controlar el riesgo, es limitar la cantidad de dinero invertido en los diversos fondos. Para este fin, la administración de AFP “PROFUTURO” ha especificado las siguientes pautas:
La cantidad total invertida en fondos de alto riesgo debe estar entre 50 y 75% de la cartera.
La cantidad total invertida en fondos de mediano riesgo debe estar entre 20 y 30% de la cartera.
La cantidad total invertida en fondos de bajo riesgo debe ser al menos de 5% de la cartera.
Una segunda forma de controlar el riesgo es diversificar, esto es, esparcir el riesgo invirtiendo en muchas alternativas diferentes. La gerencia de AFP “PROFUTURO” ha especificado que la cantidad invertida en los fondos de alto riesgo 1, 2 y 3, debe estar en la tasa 1:2:3, respectivamente. La cantidad invertida en los fondos de mediano riesgo 4 y 5 debe ser 1:2.
7. Un industrial desea determinar el programa óptimo para tres mezclas distintas que hace con diferentes proporciones de pistaches, cacahuates y avellanas. Las especificaciones de cada una de ellas son: la mezcla 1 debe contener 50% de pistaches como mínimo y 25% de cacahuates cuando más, la libra de esta mezcla se vende a 50 centavos. El segundo tipo debe contener el 25% de pistaches, por lo menos y un 50% de cacahuates cuando más, y se vende a 35 centavos la libra. El tercer tipo no tiene especificaciones y se vende a 25 centavos la libra. Sin embargo, están restringidas las cantidades de materias primas que puede conseguir el industrial, las máximas por periodo son: 100 libras de pistaches, 100 libras de cacahuates y 60 libras de avellanas. Cada libra de pistaches le cuesta 65 centavos, la de cacahuates 25 centavos y 35 centavos la de avellanas. Se trata de determinar cuantas libras se deben preparar de cada mezcla, de manera que se obtengan las máximas utilidades.
8. Un molino agrícola produce alimento para ganado y alimento para pollos. Estos productos se componen de tres ingredientes principales, a saber, maíz, cal y harina de pescado. Los ingredientes contienen dos tipos principales de nutrientes que son proteínas y calcio. En la tabla siguiente se dan los contenidos de nutrientes por libra de cada ingrediente.
NUTRIENTES INGREDIENTES
Maíz Cal Harina de pescado
ProteínaCalcio
2515
1530
2520
El contenido de Proteína en el alimento para ganado debe estar en el intervalo [18, 22] por libra. El contenido de Calcio en el mismo alimento debe ser mayor o igual que 20 por libra. De igual manera, en el alimento para pollos el contenido de Proteínas y el contenido de Calcio debe estar en los intervalos [20, 23] y [20, 25], respectivamente. Supóngase que se dispone de 3000, 2500 y 100 libras de Maíz, Cal y Harina de pescado. Supóngase también que se requieren producir 4000 y 2000 libras de alimentos para ganado y para pollos, respectivamente. El precio por libra de Maíz, la Cal y la Harina de pescado es, respectivamente, de $. 0.10, $. 0.10, y $. 0.08. Formúlese el problema de mezclado con el objeto de minimizar el costo.
9. Bob Frapples empaca frutas exóticas envueltas para regalo. Sus paquetes son envueltos en dos tiendas diferentes que las envían a cinco diferentes vendedores. El costo de empacar los productos en las tiendas 1 y 2 es de $. 5.25 y $. 5.70 respectivamente. El pronóstico de Bob de la demanda indica que los envíos deben ser como se indica en la tabla 1. La capacidad de empaque de la tienda 1 es de 20,000 paquetes y la de la tienda 2 de 12,000. Los costos de distribución desde las dos tiendas se dan en la tabla 2. Formule un modelo de programación lineal para determinar cuántos paquetes debe enviar Bob desde cada tienda a cada vendedor.
Demanda de los mayoristas (Tabla 1)
MAYORISTA
1 2 3 4 5
ENVIOS 4000 6000 2000 10000 8000
Costos de distribución (Tabla 2)
LOCALIDAD VENDEDOR
1 2 3 4 5
12
0.060.15
0.040.09
0.120.05
0.090.08
0.050.08
10. Se desea enviar 6 unidades desde el punto 1 al punto 5. En la gráfica adjunta, se detallan las rutas, los costos unitarios y las capacidades; así por ejemplo para la ruta (1 ,2), cada unidad enviada cuesta 2 dólares y su capacidad es de 4 unidades. Se desea determinar el mejor esquema de envío usando para ello un modelo de PL.
11. La Cámara de Industriales de la región periódicamente promueve servicios públicos, seminarios y programas. Actualmente los planes de promoción para este año están en marcha. Los medios alternativos para realizar la publicidad así como los costos y la audiencia estimados por unidad de publicidad, además de la cantidad máxima de unidades de publicidad en que puede ser usado cada medio se muestran a continuación.
Restricciones Televisión
Radio Prensa
Audiencia por unidad de 100.000 18.000 40.000
2
5
4
3
1
2, 4
4, 4
3, 6
5, 46, 8
5, 6
5, 4
f = 6
f
publicidadCosto por unidad de publicidad $ 2.000 $ 300 $ 600
Uso máximo del medio 10 20 10
Para lograr un uso balanceado de los medios, la publicidad en radio no debe exceder el 50% del total de unidades de publicidad autorizados. Además la cantidad de unidades solicitadas en televisión debe ser al menos 10% del total autorizado. El presupuesto total para promociones se ha limitado a $18.500.
12. Chirality Company debe producir al menos 600,000 tornillos pequeños y 400,000 tornillos grandes para satisfacer la demanda de las siguientes 4 semanas. Estos tornillos pueden producirse en dos máquinas distintas, cada una de las cuales está disponible 40 horas a la semana. Los requerimientos de costos y tiempo para producir cada tamaño de tornillo en cada máquina y el precio de venta de cada tamaño de tornillo se muestran en la siguiente tabla:
TORNILLOS PEQUEÑOS
TORNILLOS GRANDES
Precio de venta ($/1000) 27.5 32.5
Costo en la máquina 1 ($/1000)
6.25 7.75
Costo en la máquina 2 ($/1000)
8.00 9.25
Tiempo en la máquina 1 (min/lb)
1.5 1.75
Tiempo en la máquina 2 (min/lb)
1.00 1.25

En cada libra hay aproximadamente 60 tornillos pequeños y 40 tornillos grandes. Como Gerente de Producción formule el modelo de PL para maximizar la ganancia, satisfaciendo la demanda y con la disponibilidad limitada de tiempo de máquina en las siguientes 4 semanas.
13. Una perfumería produce el perfume “OXES”. Este perfume requiere de Esencia y Fijador para su producción. Dos procesos están disponibles. El proceso “A” transforma 1 onza de fijador y 2 onzas de esencia en 3 onzas de perfume. El proceso “B” transforma 2 onzas de fijador y 3 onzas de esencia en 5 onzas de perfume. Cada onza de fijador le cuesta a la perfumería Bs. 10.000,00 y cada onza de esencia Bs. 15.000,00. Se tiene una disponibilidad máxima de 200 onzas de fijador y un máximo de 350 onzas de esencia para este período de planificación. Para estimular la demanda la perfumería ha contratado una publicidad por un costo total de Bs. 4.000.000,00. El perfume se vende en embases de una onza a Bs. 40.000,00 c/u. Determine la producción óptima que permita obtener la máxima utilidad tomando en cuenta que se debe producir únicamente lo que se va a embasar.
14. La firma “DOMENICA” S.A., vende cuatro marcas de shampoo para niños: Bebito, Barney, Caricia y Chicoco. Esta firma vende exclusivamente a través de tiendas de departamentos y utiliza un personal de ventas de dos personas para visitar a sus clientes. El tiempo de ventas necesario para que cada representante venda una caja de producto varía con la experiencia y la habilidad. En seguida se presentan los datos sobre el tiempo promedio para cada uno de los representantes de “DOMENICA” S.A.
Vendedor Tiempo promedio de ventas (minutos)
Bebito Barney Caricia Chicoco
Leonardo 10 15 20 25
María 25 20 15 10
Cada vendedor invierte aproximadamente 175 horas por mes en la venta real de esos productos. Las utilidades por caja de Bebito, Barney, Caricia y Chicoco, son de $. 8, $. 10, $. 20 y $. 30 (dólares) respectivamente. ¿Cuántas cajas de cada shampoo deben vender cada persona durante el próximo mes para maximizar las utilidades de la empresa? Formule el problema como un modelo de PL.
¿COMO RESOLVER UN PROBLEMA MEDIANTE PROGRAMACION LINEAL?
EL PROBLEMALa fábrica de hilados y tejidos “Salazar” requiere fabricar dos tejidos de calidad diferente T y T’; se dispone de 500 kg de hilo a, 300 kg de hilo b y 108 kg de hilo c. Para obtener un metro de T diariamente se necesitan 125 gr de a, 150 g de b y 72 gr de c; para producir un metro de T’ por día se necesitan 200 gr de a, 100 gr de b y 27 gr de c.
El T se vende a $. 4000 el metro y el T’ se vende a $. 5000 el metro. Si se debe obtener el máximo beneficio, ¿Cuántos metros de T y T’ se deben fabricar?
El problema se recomienda leer en más de una ocasión para facilitar el reconocimiento de las variables, además es muy recomendable la elaboración de tablas o matrices que faciliten una mayor comprensión del mismo.
PASO 1: "FORMULAR EL PROBLEMA"Para realizar este paso partimos de la pregunta central del problema. ¿Cuántos metros de T y T’ se deben fabricar? Y la formulación es: “Determinar la cantidad de metros diarios de tejido tipo T y T’ a fabricar teniendo en cuenta el óptimo beneficio respecto a la utilidad”.
PASO 2: DETERMINAR LAS VARIABLES DE DECISIÓNBasándonos en la formulación del problema nuestras variables de decisión son:XT: Cantidad de metros diarios de tejido tipo T a fabricar XT’: Cantidad de metros diarios de tejido tipo T’ a fabricar
PASO 3: DETERMINAR LAS RESTRICCIONES DEL PROBLEMAEn este paso determinamos las funciones que limitan el problema, estas están dadas por capacidad, disponibilidad, proporción, no negatividad entre otras. De disponibilidad de materia prima: 0,12XT + 0,2XT <= 500 Hilo “a” 0,15XT + 0,1XT’ <= 300 Hilo “b” 0,072XT + 0,027XT’ <= 108 Hilo “c” De no negatividad XT, XT’ >= 0
PASO 4: DETERMINAR LA FUNCIÓN OBJETIVOEn este paso es de vital importancia establecer el contexto operativo del problema para de esta forma determinar si es de Maximización o Minimización. En este caso abordamos el contexto de beneficio por ende lo ideal es Maximizar. Función Objetivo ZMAX = 4000XT + 5000XT’
PASO 5: RESOLVER EL MODELO UTILIZANDO SOFTWARE O MÉTODOS MANUALESA menudo los problemas de programación lineal están constituidos por innumerables variables, lo cual dificulta su resolución manual, es por esto que se recurre a software

especializado, como es el caso de WinQSB, STORM o para modelos menos complejos se hace útil la herramienta Solver de Excel.
El anterior ejercicio fue resuelto mediante Solver - Excel, y su resultado fue:
2.5 “PROGRAMACIÓN LINEAL: SOLUCIÓN DE PROBLEMAS CON EL“MÉTODO GRÁFICO”
Existen dos metodologías para solucionar un problema modelado en Programación Lineal: el Método Gráfico y el Método Simplex.
El Método Gráfico se utiliza para ilustrar tres conceptos básicos: la metodología para la resolución de un problema de dos variables de decisión, la interpretación de la solución del problema modelado y la observación gráfica de cómo afectan los cambios a la solución del problema. El Método Gráfico es poco poderoso ya que está limitado a resolver problemas de dos o máximo tres variables de decisión. Sin embargo, su importancia radica en que permite visualizar los conceptos matemáticos implicados en la Programación Lineal.
Por su parte, el Método Simplex es utilizado para resolver problemas más complejos de Programación Lineal. Es un método poderoso, utilizado para resolver problemas de "n" variables de decisión, aunque también se puede emplear para resolver problemas de dos variables como lo hace el Método Gráfico.
El enfoque propuesto aquí, es utilizar la computadora como una herramienta de apoyo para resolver problemas de Programación Lineal de cualquier tamaño. Sin embargo, se deben estudiar primero los fundamentos de estos métodos de solución para

posteriormente utilizar la computadora para este fin. El uso de la computadora en la solución de problemas en Programación Lineal, implica utilizar cualquiera de estas dos alternativas: primera, usar una hoja electrónica como puede ser Excel, donde el usuario hace directamente la programación para solucionar el problema modelado; segunda, el uso de un paquete de software comercial, que ya está diseñado para la resolución del Método Gráfico y del Simplex.
Algunos de los paquetes de software comercial más conocidos son: el Storm, el WinQSB, Lindo, Eureka, etc. Estos tipos de software han evolucionado de acuerdo a los avances tecnológicos de la época, con la tendencia de tener una herramienta más poderosa pero con cierta pérdida de hacer usuarios más pensantes y no solo manipuladores de la misma. Es obvio que el uso de la computadora permite un gran ahorro de tiempo en el procesamiento de los datos y que hace posible la solución de problemas más complejos a los que normalmente se hacen dentro del aula. Sin embargo, el uso de cualquier paquete de software requiere tener el problema ya modelado, para ser capturado en el formato requerido por dicho software. En esta forma, se puede obtener la solución óptima del problema como un reporte de salida de la computadora pero esta solución matemática requiere de una interpretación por parte del usuario para la toma de decisiones.
El ciclo completo a realizar en la solución de un problema es: modelar el problema, solucionar el problema modelado e interpretar la solución obtenida. De estas tres partes, las que más desarrollan las habilidades del pensamiento son la modelación del problema y la interpretación de la solución encontrada. En este caso, se considera de menor contribución a la etapa de la solución del problema, que se puede hacer a través de la computadora.
Sin embargo, el enfoque de este capítulo es fundamentar los conceptos básicos de la Programación Lineal a través del Método Gráfico. Para esta finalidad, se han desarrollado dos ejercicios, el primero está enfocado amostrar "la metodología y los conceptos básicos" del Método Gráfico y el segundo, presenta el "ciclo completo" que se sigue en la solución de un problema de Programación Lineal.
Ejercicio 1. Metodología y conceptos básicos del “Método Gráfico”.
Se presenta la metodología utilizada por el Método Gráfico para encontrar la solución óptima de un problema modelado y los conceptos básicos de la Programación Lineal que se pueden visualizar a través del él. Se presenta el siguiente problema:
Función Objetivo: Máx. Z = 3X1 + 6X2 Restricciones:
a. X1 ≤ 10b. X2 ≤ 10c. X1 + X2 ≤ 16d. 6X1 + 4X2 ≥ 48e. X1 + X2 ≤ 20f. 2X1 + 4X2 ≥ 16g. X1 - X2 ≤ 0

h. No negatividad: X1, X2 ≥ 0
2.6 Metodología.El Método Gráfico utiliza la siguiente metodología para encontrar la solución óptima de un problema:
a. Calcular los puntos para graficar cada restricción.b. G r a f i c a r l a s r e s t r i c c i o n e s .c. D e t e r m i n a r l a r e g i ó n f a c t i b l e .d. Calcular las coordenadas de los vértices de la región factible.e. Calcular el valor de la Función Objetivo en dichos vértices.f. E n c o n t r a r l a s o l u c i ó n ó p t i m a d e l p r o b l e m a .
Calcular los puntos para graficar cada restricción.
P a r a g r a f i c a r u n a r e s t r i c c i ó n , p r i m e r o s e l e c o n s i d e r a c o m o u n a r e c t a , e s d e c i r c o m o s i f u e r a u n a igualdad, y luego se encuentra el espacio solución que cumple con la condición de dicha restricción, poniendo una pequeña flecha para indicarlo.
En este problema se presentan tres variantes que se pueden encontrar al graficar una restricción: cuando es paralela a alguno de los ejes de coordenadas, cuando cruza los dos ejes de coordenadas y cuando pasa por el punto de origen (0,0). A continuación se presentan las variantes:
Las restricciones "a" y "b" del problema son paralelas a los ejes X 1 y X2. Se reconoce que una restricción es paralela cuando solo tiene una de las variables, por ejemplo la restricción "a" solo tiene la X1 por lo que es paralela al eje X2. Otro tipo de restricciones son las que cruzan por los dos ejes como las restricciones "c", "d", "e" y "f”.
Existen también restricciones que pasan por el punto (0,0) como la restricción "g".
Para graficar una recta existen diferentes métodos, uno de ellos es el "método de los dos puntos". Endicho método se establece que, para graficar una recta es necesario conocer al menos dos puntos pertenecientes a ella.
Para calcular las coordenadas de los dos puntos P1y P2, se elige arbitrariamente una de las variables de la restricción, por ejemplo X1 y se hace igual a cero, calculándose la otra variable X2; luego se proceda a la inversa, se hace X2= 0 y se calcula X1. Si la restricción es paralela a uno de los ejes, simplemente se f i j a l a c o o r d e n a d a y s e t r a z a l a r e c t a . A c o n t i n u a c i ó n s e m u e s t r a l o s p u n t o s c a l c u l a d o s p a r a c a d a restricción:
Restricciones Puntos para graficar la recta: P1 (X1, 0) P2 (0, X2)
a. X1 ≤ 10 10,0 –b. X2 ≤ 10 - 0,10c. X1 + X2 ≤ 16 16,0 0,16d. 6X1 + 4X2 ≥ 48 8,0 0,12

e. X1 + X2 ≤ 20 20,0 0,20f. 2X1 + 4X2 ≥ 16 8,0 0,4g. X1 - X2 ≤ 0 0,0 0,0
Graficar las restricciones.
A continuación se explica cómo graficar cada una de las variantes de las restricciones:Para graficar una restricción paralela a uno de los ejes, como lo es "a", se marca el punto (10,0) que está sobre el eje X1 y se traza paralelamente al eje X2. El espacio de solución es evidente para este tipo de restricciones, que en este caso, el sentido de la restricción es hacia la izquierda como se puede ver en el gráfico de la Figura 1.Para graficar una restricción que cruza los dos ejes, como sería "d", se marca el punto uno (8,0) en e l e j e X 1 y e l p u n t o d o s ( 0 , 1 2 ) e n e l e j e X 2 y se unen trazando una recta. Para determinar el espacio de solución, se puede hacer directamente observando el tipo de desigualdad que tiene la restricción, sin embargo, se recomienda probar el sentido de la restricción con el punto (0,0). Al sustituir estos valores en la restricción, se checa si cumple o no con la condición impuesta por dicha restricción.
Si cumple con la condición, entonces el espacio solución será de la recta hacia el origen (0,0), que fue el punto que se probó. Si no cumple la condición, el espacio solución será en sentido contrario. Por ejemplo, si sustituimos este punto en la restricción "d, se tendrá 0 ≥ 48 que no cumple con la restricción, por lo que su sentido será en dirección contraria al origen (0,0) como se puede ver en el gráfico de la Figura 1.
Para graficar una restricción que pasa por el punto de origen (0,0), como lo es "g", se requiere generar un "punto auxiliar". Este punto auxiliar, se calcula dando un valor arbitrario a una de las variables para sustituirla en la ecuación de la restricción y poder despejar la otra variable, por ejemplo, si consideramos X1 = 2 se tiene que:
2 - X2 = 0 X2 = 2
El punto auxiliar es (2,2). Ahora se tienen dos puntos, el (0,0) y el (2,2) por donde pasará la recta. Para determinar el espacio solución es necesario probar con cualquier punto separado de la recta, ya sea por arriba o por abajo de ella. Si el punto probado satisface la restricción, el espacio de solución será en esa dirección sino será en sentido contrario. Por ejemplo, si se prueba con el punto (10,2) que está por abajo de la recta, al sustituir en la restricción, se tendrá 8 ≤ 0 que no cumple con la restricción, por lo que el espacio solución será hacia arriba (ver Figura 1), es decir en sentido contrario al punto probado. Si se hubiera probado un punto por arriba de la recta como el (2,20) se llegaría a la misma conclusión.
Determinar la región factible.
Para determinar la región factible en la gráfica de la Figura 1, es importante atender el sentido de las r e s t r i c c i o n e s p a r a e n c o n t r a r e l á r e a c o m ú n a t o d a s . P a r a h a c e r e s t o , n o s p o d e m o s a u x i l i a r d e l a s pequeñas flechas que indican el sentido de cada restricción. Cuando se tienen muchas restricciones graficadas, una forma simple de encontrar la región factible, es considerar a cada restricción como el

corte que se hace en un pastel. Se regala la rebanada que no cumple con el sentido de la restricción y dejamos la que si cumple. Al seguir haciendo los demás cortes, la rebanada que queda se hará cada vez más pequeña. La parte que queda al final será la región factible. Esta concepción propuesta, se puede visualizar considerando que cada restricción divide el espacio en dos partes. La parte que cumple con el sentido de la restricción está señalada por una pequeña flecha.
A continuación se presenta la gráfica de las restricciones del problema y la región factible:
Figura 1. Gráfica de las restricciones y de la región factible.

Calcular las coordenadas de los vértices de la región factible. En el gráfico de la Figura 1, se marcaron los vértices que forman la región factible. La importancia de calcular las coordenadas de estos vértices, es que ayudan a calcular el valor de la Función Objetivo encada uno de ellos y en base a este listado, se encuentra la solución óptima del problema.
Una forma sencilla de calcular las coordenadas de un vértice, es leerlas directamente en la gráfica, perola precisión de la lectura dependerá de la calidad que se tenga en dicha gráfica. Otra forma que no depende de la precisión de la gráfica, es ver qué restricciones forman al vértice y solucionar este sistema d e d o s e c u a c i o n e s p o r a l g ú n m é t o d o a l g e b r a i c o . S i n e m b a r g o , s e p u e d e n r e d u c i r l o s c á l c u l o s s i clasificamos los vértices en dos tipos: los que están sobre uno de los ejes de coordenadas y los que están fuera de los ejes.
Cuando un vértice está sobre uno de los ejes, se pueden leer directamente sus coordenadas en el gráfico o en los puntos calculados para graficar la restricción.
Si el vértice está fuera de los ejes, se requiere c a l c u l a r s u s c o o r d e n a d a s a t r a v é s d e u n s i s t e m a d e e c u a c i o n e s s i m u l t á n e a s , d a d o p o r l a s d o s r e s t r i c c i o n e s q u e s e c r u z a n p a r a f o r m a r d i c h o v é r t i c e .
S i u n a d e l a s r e s t r i c c i o n e s e s p a r a l e l a , simplemente se sustituye el valor de esa variable en la otra restricción.
Analizando la gráfica, se verá que todos los vértices de la región factible están fuera de los ejes. El vértice "A" está formado por la intersección de las restricciones "d" y "g", el vértice "B" por "b" y "d", el "C" por "b" y "c" y el "D" por "c" y "g". A continuación se calculan las coordenadas de cada vértice:
Vértice "A": Restricción "d" 6X1 + 4X2 = 48Restricción "g" 4(X1 - X2 = 0)
____________10X1 = 48 X1 = 4.8 X2 = 4.8
Vértice "B": Restricción "b" X2 = 10 Sustituyendo en la Restricción "d" se tiene:
6X1 + 4(10) = 48 X1 = 1.3
Vértice "C": Restricción "b" X2 = 10Sustituyendo en la Restricción "c" se tiene:
X1 + X2 = 16 X1 = 6
Vértice "D": Restricción "c" X1 + X2 = 16
Restricción "g" X1 - X2 = 0

____________2X1 = 16 X1 = 8 X2 = 8
Calcular el valor de la Función Objetivo en dichos vértices.
Para calcular el valor de la Función Objetivo en un vértice, simplemente se sustituye en ella el valor de X1 y X2 dado por las coordenadas de dicho vértice. A continuación se da una tabla con las coordenadas de los vértices de la región factible y el valor de la Función Objetivo en cada uno de ellos:
Vértice Coordenadas(X1, X2) Z = 3X1 + 6X2
ABCD
4.8 4.8 1.3 10.06.0 10.08.0 8.0
43.263.978.072.0
Encontrar la solución óptima del problema.
En la tabla anterior, se presentaron los valores de la Función Objetivo en cada uno de los vértices de la región factible, de éstos se escoge aquel valor que cumple con lo establecido en la Función Objetivo, en este caso la Máx. Z. Al seleccionar en la tabla el renglón de la Máx. Z, se puede leer directamente los valores de la solución óptima del problema y el vértice donde está. La solución óptima del problema está en el vértice "C" de la región factible y sus valores son: X1= 6; X2= 10; Máx. Z = 78. En este problema, si la Función Objetivo hubiera sido de minimización, se habría escogido el 43.2 que es el valor mínimo de la tabla. Entonces, la solución óptima hubiera sido localizada en el vértice "A" con los siguientes valores: X1 = 4.8; X2 = 4.8; mín. Z = 43.2. Como se ha observado, la solución óptima del un problema, depende de la región factible que se forme con el conjunto de restricciones y de la inclinación que tenga la Función Objetivo que le permite alcanzar su valor óptimo, así sea de maximización o de minimización.
1.2. Conceptos básicos.
Algunos conceptos básicos de la Programación Lineal que se pueden visualizar a través del Método Gráfico son:
a . R e g i ó n f a c t i b l e .b. Restricción activa y Restricción redundante.c . D e m o s t r a r q u e : M á x . Z = m í n . ( - Z )d . D e m o s t r a r q u e : "La solución óptima de cualquier problema de
Programación Lineal, siempre estará en uno de los vértices o en todo un lado de su región factible".
e . V é r t i c e s f u e r a d e l a r e g i ó n f a c t i b l e .f . A n á l i s i s d e c a m b i o s q u e a f e c t a n a l m o d e l o d e l p r o b l e m a .
Región factible.
Máx. Z

La región factible es formada por las restricciones del problema y en alguno(s) de sus vértices se localiza la solución óptima.La forma de la región factible depende del tipo de restricciones que se tengan. Aún así, se pueden considerar dos tipos básicos: la región factible "cerrada" y la "abierta”.La región factible cerrada se tiene cuando las restricciones, incluyendo las de "no negatividad", delimitan la región factible del problema. En el tipo abierto, se tiene una región factible no acotada que solo permite la minimización. A continuación se presentan los gráficos de estos tipos de región factible:
Figura 2. Región factible cerrada: Región factible abierta: a. Apoyada en los 2 ejes. a. Hacia la derecha. b. Apoyada en un eje. b. Hacia arriba. c. Sin apoyo en los ejes.
Cuando un problema modelado no tiene región factible, es debido a que algunas de sus restricciones son contradictorias entre sí. Este tipo de problemas son "infactibles", es decir, que el problema modelado no t i e n e s o l u c i ó n . E n e s t o s c a s o s e s n e c e s a r i o r e v i s a r e l m o d e l o d e l p r o b l e m a , y a q u e e x i s t e a l g u n a inconsistencia en las restricciones que no permite tener una región factible.
Restricción activa y Restricción redundante.
Las restricciones que forman parte de la región factible son las "restricciones activas" mientras las que no la forman son las "redundantes”.Las restricciones activas son las realmente forman la región factible donde está la solución óptima. Estas restricciones son la esencia del problema modelado, de tal forma que, si se quita alguna de ellas se cambia la solución óptima. Las restricciones activas que se tienen en el problema son "b", "c", "d" y "g".Una restricción redundante no tiene ningún efecto en la solución óptima del problema, es una restricción ficticia que da lo mismo dejarla en el modelo o quitarla. Las restricciones redundantes que se tienen en el problema son "a", "e" y "f".

Demostrar que: Máx. Z = mín. (-Z)
Al demostrar que Máx. Z = mín. (-Z), también se está demostrando que lo contrario es verdadero, es decir que mín. Z = Máx. (-Z).
Este principio es muy poderoso en la solución de problemas de minimización mediante el Método Simplex, método que se estudiará posteriormente para solucionar problemas de cualquier tamaño. Esto permite que un problema de minimización sea transformado y s o l u c i o n a d o c o m o u n p r o b l e m a d e Maximización, cambiando solamente los signos de su Función Objetivo.
U n e j e m p l o d e c ó m o p u e d e s e r t r a n s f o r m a d o u n p r o b l e m a m o d e l a d o d e m i n i m i z a c i ó n p a r a s e r solucionado a través del Método Simplex, es el siguiente:
min. Z = 30X1 + 10X2 → Máx. Z = - 30X1 - 10X2
Restricciones 2X1 + 4X2 ≤ 80 X1 + X2 = 258X1 + 6X2 ≥ 120
Ahora se tiene un problema modelado de Maximización, donde solo se cambió de signo a la Función Objetivo y las restricciones siguieron iguales. Este problema se soluciona con el Método Simplex para encontrar la solución óptima y el valor del Máx. Z, valor que siempre será negativo. La solución al problema original de minimización, será la misma solución que se encontró para el problema resuelto de Máx. (-Z) y el valor de la min. Z será el mismo que el Máx. Z pero con signo positivo.
Regresando a la demostración pedida, la podemos hacer en una forma muy simple. Aprovechando las coordenadas de los vértices de la región factible que se tienen en la tabla, se pueden sustituir en la Función Objetivo que quedó transformada como mín. Z = -3X1 - 6X2. A continuación se presenta el análisis que permite hacer la demostración:
Vértice Coordenadas(X1, X2)
Z = 3X1 + 6X2 Z = -3X1 + 6X2
ABCD
4.8 4.8 1.3 10.06.0 10.08.0 8.0
43.263.978.072.0
-43.2-63.9-78.0-72.0
Comparando los valores de la solución óptima del problema, se puede concluir que:
Máx. Z = mín. (-Z) y consecuentemente que mín. Z = Máx. (-Z)
Demostrar que:
"la solución óptima de cualquier problema de Programación Lineal, siempre estará en uno de los vértices o en todo un lado de su región factible".
Máx. Z

La solución óptima de un problema de Programación Lineal puede ser de dos tipos: solución "puntual o única" y la solución en forma de "rango".
La solución del tipo puntual siempre estará en uno de los vértices de la región factible, como consecuencia de la pendiente que tiene la Función Objetivo al cruzar dicha región. Si se desplaza paralelamente la Función Objetivo a través de la región factible, se verá que la solución óptima estará en uno de los vértices.
Cuando la Función Objetivo es paralela a una de las restricciones que forman la región factible, se provoca un "rango óptimo" de soluciones. Este rango óptimo es consecuencia de que la Función Objetivo cruza la región factible por todo un lado, desde un vértice hasta el otro. Este rango de soluciones óptimas significa que se puede generar al menos una "solución óptima alterna" para el problema, o bien, una gama de "soluciones óptimas múltiples".
Para demostrar que la solución óptima está en uno de los vértices de la región factible, se puede ver en la tabla anterior, el listado de valores que adopta la Función Objetivo al cruzar por cada uno de los vértices y simplemente seleccionar el máximo valor que es la Máx. Z. Se observará que dicha solución óptima está en el vértice "C".
Otra forma que se tiene de hacer esta demostración, es que al graficar la Función Objetivo con el valor de la Máx. Z deberá pasar por el vértice "C". El graficar la recta de la Función Objetivo es exactamente igual que graficar la recta de una restricción. La ecuación de la Función Objetivo que se debe graficar es la siguiente:
78 = 3X1 + 6X2.
Con esta ecuación, se puede calcular los dos puntos sobre los ejes por donde pasa la Función Objetivo quedando P1 (26,0) y P2 (0,13). Al graficar la recta, se observa que efectivamente pasa por el vértice "C" como lo muestra la gráfica de las restricciones.Con la intención de mostrar un problema que tenga “soluciones óptimas múltiples, se modificó ligeramente el problema actual. Se dejaron las mismas restricciones y se cambió la Función Objetivo a:
Máx. Z = 6X1+ 6X2
Como las restricciones no cambiaron, se tiene la misma región factible con los mismos vértices y coordenadas que se pueden utilizar para sacar los valores de la Función Objetivo que se muestran en la siguiente tabla:
Vértice Coordenadas(X1, X2)
Z = 6X1 + 6X2
ABCD
4.8 4.8 1.3 10.06.0 10.08.0 8.0
57.667.896.096.0
Al buscar en la tabla anterior la solución óptima del problema, se encuentra dos soluciones óptimas, es decir una de ellas será la solución óptima y la otra será una solución óptima alterna, quedando en la siguiente forma:
} Rango
Óptimo

Solución Óptima Solución Óptima Alterna (Vértice "C") (Vértice "D") X1 = 6 X1 = 8
X2 = 10 X2 = 8 Máx. Z = 96 Máx. Z = 96
Al tener dos soluciones óptimas se puede calcular el "rango óptimo" para el problema, quedando en la siguiente forma:
6 ≤ X1 ≤88 ≤ X2 ≤10Máx. Z = 96
Conociendo el rango óptimo, se pueden generar múltiples soluciones óptimas para el problema. Por ejemplo, para calcular otra solución óptima, que sea diferente a las que ya conocemos, se puede dar un valor arbitrario a una de las variables siempre y cuando este dentro de su rango. Si consideramos X1 = 7 entonces, sustituyendo este valor en la Función Objetivo, queda:
96 = 6(7) + 6X2X2 = 9
Esta nueva solución óptima del problema fue sacada del rango óptimo, quedando como:X1 = 7X2 = 9Máx. Z = 96En esta forma, se pueden generar diferentes soluciones óptimas para el problema, pero todas ellas tendrán como característica el mismo valor de Máx. Z = 96. Algunas otras soluciones óptimas que se pueden sacar del rango óptimo son: X1= 6 X1= 8X2= 10 X2= 8Máx. Z = 96 Máx. Z = 96
Una advertencia, si se fijan las dos variables al mismo tiempo, aún con valores que estén dentro de sus rangos, no necesariamente esto será una solución óptima para el problema. Por ejemplo, considere X1 = 6 y X2 = 9. Esta solución no es óptima, ya que sustituyendo en la Función Objetivo se tiene una Máx. Z =90 pero no de 96. La razón se puede ver gráficamente, si se ubica este punto, se observará que está dentro de la región factible pero no sobre la recta que une los vértices "C" y "D", por lo que este punto es una solución factible pero no óptima. Solo los puntos que están exactamente sobre la recta que une los vértices "C" y "D" darán soluciones óptimas.
Vértices fuera de la región factible.
Anteriormente, se estableció que la solución óptima está en algún vértice de la región factible. También se pueden ver en la gráfica, vértices que están fuera de la región factible, por lo que podemos preguntar:
¿Qué significado tiene el vértice formado por el cruce de las restricciones "a" y "c"?

Este vértice está formado por la restricción "a" que es redundante y por la restricción "c" que es activa ya que forma parte de la región factible. Además, este vértice está fuera de la región factible como lo muestra la gráfica, lo que significa, que ese punto no cumple con todas las restricciones del problema modelado y que tiene algún recurso sobrante. El recurso sobrante estará en la restricción redundante por lo que se puede calcular su valor. La restricción activa indica que el recurso ha sido utilizado completamente por lo que no hay sobrantes.
Si quiere conocer todas las restricciones que el vértice puede cumplir y las que no, es necesario calcular sus coordenadas para tener un valor de X1 y de X2. Resolviendo las ecuaciones de las restricciones "a" y "c", se tiene que X1 = 10 y X2 = 6. Al sustituir estos valores en cada una de las restricciones del problema modelado, se podrá decir si cumple o no con la restricción particular. Haciendo esto, nos damos cuenta que este vértice no cumple con la restricción "g" pero si con todas las demás.
Además de identificar la restricción con la que no cumple el vértice, también se puede hacer un "análisis de los recursos". Para hacer este análisis, se debe sustituir los valores de la solución óptima (X1 = 6 y X2 = 10) en las restricciones que forman el vértice. A continuación se muestra el análisis:
Restricción "a": X1 ≤ 10 6 ≤ 10 Sobran 4.
Restricción "c": X1 + X2 ≤ 16 6 + 10 ≤ 16
6 ≤ 10 No sobra nada
Se concluye que sobran 4 del recurso utilizado en la restricción "a" ya que se gastaron 6 de los 10disponibles. Por otra parte, se gastó totalmente el recurso de la restricción "c" que forma parte de la región factible.
¿Qué significado tiene el vértice formado por las restricciones "a" y "e"?
Es un vértice fuera de la región factible donde sus dos restricciones son redundantes ya que no forman parte de la región factible. Al sustituir los valores de la solución óptima en las dos restricciones, se puede hacer el siguiente análisis de los recursos:
Restricción "a": X1 ≤ 10 6 ≤ 10 Sobran 4
Restricción "e": X1 + X2 ≤ 20 6 + 10 ≤ 20 Sobran 4
Se concluye que, un vértice fuera de la región factible siempre tendrá recursos sobrantes en cada restricción redundante que tenga.
Análisis de cambios que afectan al modelo del problema.Un problema modelado de Programación Lineal, que experimente algún tipo de cambio, puede o no cambiar su solución óptima dependiendo del cambio. Existen dos tipos básicos de cambio: el cambio de un coeficiente de contribución de la Función Objetivo o el cambio en la disponibilidad de los recursos de las restricciones.
Un cambio en alguno de los coeficientes de la Función Objetivo, equivale a rotar dicha Función Objetivo. Cuando se quiere provocar una solución óptima alterna, se rota la Función Objetivo hasta quedar paralela a una restricción activa. Dependiendo del sentido de la rotación que se haga en la Función Objetivo así será el cambio que tenga su ecuación.Anteriormente, se trabajó un problema de rotación de la Función Objetivo donde se modificó la ecuación de una Máx. Z = 3X1+ 6X2 a Máx. Z = 6X1+6X2. Más adelante se presentan los pasos que se siguieron para calcular esta "nueva Función Objetivo" que tiene una solución óptima alterna. S i e l c a m b i o r e a l i z a d o a f e c t a a l a " d i s p o n i b i l i d a d d e l r e c u r s o " d e l a r e s t r i c c i ó n , e s d e c i r a l t é r m i n o independiente, entonces la recta se moverá paralelamente. Si el término independiente aumenta de valor, hará que la recta se mueva paralelamente hacia arriba o hacia la derecha. Por el contrario, si disminuye de valor, la recta se moverá paralelamente hacia abajo o hacia la izquierda.Existen otros tipos de cambios que puede experimentar el modelo del problema, por ejemplo, quitar una restricción, agregar una nueva restricción, cambiar el sentido de una restricción.Dependiendo del tipo de c a m b i o s e r á e l e f e c t o q u e t e n g a e n l a s o l u c i ó n ó p t i m a d e l p r o b l e m a . E s t o s c a m b i o s s e a n a l i z a n a continuación con las siguientes preguntas:
¿Qué pasa con la solución óptima del problema si se "quita" la restricción "a"?
Como la restricción "a" es una restricción redundante, al quitarla del modelo no afecta en nada a la región factible por lo que la solución óptima sigue siendo la misma.
¿Se modifica la región factible del problema al quitar la restricción "b"?
Si en el modelo del problema se quita solo la restricción "b" que es una restricción activa, si se modifica la región factible y en consecuencia cambia la solución óptima del problema.
¿Cambia la solución óptima del problema si se agrega al problema una nueva restricción, por ejemplo X 2 <= 7?
Esta nueva restricción disminuye la región factible que se tenía anteriormente, consecuentemente cambia la solución óptima del problema.
¿Se afecta la solución óptima del problema si se cambia el "sentido" de la restricción "e"?
Al hacer este cambio, el problema modelado no tiene una solución óptima ya que se vuelve "infactible" a consecuencia de que no tiene una región factible que cumpla con todas las restricciones.
¿Cómo se puede modificar la ecuación de una Función Objetivo para que tenga una solución óptima alterna?
Es posible hacer intencionalmente que un problema tenga una solución óptima alterna como en el caso q u e s e p r e s e n t ó . P a r a c a l c u l a r u n a n u e v a F u n c i ó n O b j e t i v o q u e s e a p a r a l e l a a a l g u n a d e l a s restricciones del problema modelado, es necesario rotar la Función Objetivo que se tiene hasta lograr esto.
La Función Objetivo del problema original (Máx. Z = 3X1+ 6X2) se forzó a rotar hasta que fuera paralela a la restricción "c" para generar una solución óptima alterna. U n a c o n d i c i ó n

i n d i s p e n s a b l e p a r a h a c e r q u e d o s r e c t a s s e a n p a r a l e l a s e s q u e t e n g a n l a m i s m a pendiente. Uno de los métodos que existen para calcular la pendiente de una recta, es ponerla en el formato y = mx + b, donde la "m" es la pendiente de la recta. Utilizando este método, se calcula la pendiente de la r e s t r i c c i ó n " c " y l a p e n d i e n t e q u e d e b e d e t o m a r l a n u e v a F u n c i ó n O b j e t i v o . S e e x p r e s a n a m b a s e c u a c i o n e s c o n e l f o r m a t o r e q u e r i d o d e s p e j a n d o l a m i s m a v a r i a b l e , e n e s t e c a s o X 1 (variable dependiente). El coeficiente de la X 1 e n l a F u n c i ó n O b j e t i v o c a m b i a r á d e v a l o r , p o r l o q u e s e d e j a expresado como una variable "a" que es necesario calcular.
A continuación se presentan los cálculos:
Restricción "c" Nueva Función Objetivo
X1 + X2= 16 Z = aX1 + 6X2
X1 = -X2 + 16 X1 = (-6/a)X2 + Z/am = -1 m = -6/a
Para hacer estas dos rectas paralelas se igualan sus pendientes quedando:
-1 = -6/a a = 6
Conociendo que a = 6, se puede sustituir este valor para dar la ecuación de la nueva Función Objetivo que será:
Máx. Z = 6X1+ 6X2.
Se puede establecer que, si la rotación de la Función Objetivo es en el sentido de las manecillas del reloj, el coeficiente de la variable dependiente (en nuestro caso X1) incrementará su valor. Por el contrario, si la rotación es en contra de las manecillas del reloj, el coeficiente de la variable independiente (en nuestro caso X2) aumentará su valor. En ambos casos se tendrá una ecuación modificada por la rotación de la Función Objetivo.En el problema desarrollado, el coeficiente de la X1 (Variable dependiente) pasó de 3 a 6, es decir que se rotó la Función Objetivo en el sentido de las manecillas del reloj. Esta rotación se puede visualizar fácilmente en la gráfica.
Ejercicio 2. Modelación, solución e interpretación para un problema de Programación Lineal.Partiendo de un problema, se presenta el desarrollo de cada una de las partes que conforman el ciclo completo de la solución de un problema de Programación Lineal: la modelación del problema, la solución del mismo y la interpretación de la solución óptima obtenida:
Fabricación de Fertilizantes.Una empresa de productos químicos fabrica, entre otros artículos, dos tipos de fertilizantes que requieren de la combinación de ciertos ingredientes que son comprados a proveedores extranjeros. Como cada m e s s e t i e n e q u e p l a n e a r l a s t o n e l a d a s q u e s e d e b e n d e p r o d u c i r d e c a d a f e r t i l i z a n t e , s e d e b e d e considerar para
hacer el programa de producción, el precio de venta de los fertilizantes, el costo de los ingredientes, cualquier pedido que se deba surtir y las restricciones propias de la fabrica como son la d i s p o n i b i l i d a d d e m a n o d e o b r a , l a d i s p o n i b i l i d a d d e m a t e r i a s p r i m a s e n e l a l m a c é n y l o s t i e m p o s requeridos en el proceso de fabricación.
O t r o a s p e c t o a c o n s i d e r a r e s , q u e l a e m p r e s a e s t á i m p l e m e n t a n d o u n a n u e v a e s t r a t e g i a d e mercadotecnia que consiste en vender sus fertilizantes mediante un mayorista en vez de hacerlo ella misma. Esto ha cambiado la forma normal de programar la producción, ya que ahora solo se deben considerar las restricciones de producción pero no las de ventas.
Uno de los fertilizante fabricado es el 5-5-10, indicando con estos números, la mezcla de los ingredientes que utiliza el fertilizante, en este caso es 5% de Nitrato, 5% de Fosfato, 10% de Potasio y el resto es un estabilizador formado por un relleno de tierra. El otro fertilizante llamado 5-10-5, tiene 5% de Nitrato, 10%de Fosfato, 5% de Potasio y resto es el relleno de tierra. El mayorista pagará a $715 la tonelada del 5-5-10 y $690 por el 5-10-5. La disponibilidad y los costos de las materias primas para el próximo mes son: 1,100 toneladas de Nitrato a $2000 por tonelada, 1,800 toneladas de Fosfato a $800 cada una y 2,000toneladas de Potasio a $1600 cada una. La tierra está disponible en cantidades ilimitadas a un costo de$100 por tonelada. Considere que no hay restricciones por la capacidad de producción pero si existe un costo de mezclado de $150 por tonelada para cualquiera de los fertilizantes.La empresa quiere desarrollar un modelo, que le ayude a utilizar correctamente los ingredientes que importa, para elaborar su programa de producción mensual de tal forma que permita maximizar su utilidad. D e s p u é s d e c o n o c e r e l p r o b l e m a , e s c o n v e n i e n t e o r g a n i z a r l o s d a t o s q u e s e d a n e n e l m i s m o p a r a posteriormente modelarlo. En la siguiente tabla se presentan los datos del problema ya estructurados:
Tabla de Datos.
El costo de mezclado de cualquiera de los fertilizantes es de $150 por tonelada.
Modelación.
Variables de Decisión.Xi = Toneladas del Fertilizante "i" a fabricarse por mes (ton/mes)
Ingredientes F e r t i l i z a n t e ( % )
Disponibilidad(ton/mes)
Costo($/Ton)
5-5-10 5-10-5NitratoFosfatoPotasioRelleno
55
1080
5105
80
1,1001,8002 ,000
ilimitado
2,000800
1,600100
Precio Venta($/Ton)
715 690

Función Objetivo.Para hacer la Función Objetivo, primero se debe calcular el margen de utilidad por tonelada de cada uno de los fertilizantes en base a la siguiente ecuación:
Utilidad = Precio Venta - Costo Total($/ton) ($/ton) ($/ton)
Se calcula el costo total por tonelada de fertilizante en base a la siguiente ecuación:
Costo Total = Costo de Materia Prima + Costo de mezclado($/ton) ($/ton) ($/ton)
Fertilizante 5-5-10: Costo Materia Prima = 0.05 (2000)+0.05 (800)+0.10 (1600)+0.80 (100) = $380/ton Costo de Mezclado = $150/tonCosto Total = $530/tonMargen de Utilidad = 715 - 530 = $185/ton
Fertilizante 5-10-5:Costo Materia Prima = 0.05 (2000)+0.10 (800)+0.05 (1600)+0.80 (100) = $340/tonCosto de Mezclado = $150/tonCosto Total = $490/tonMargen de Utilidad = 690 - 490 = $200/ton
La Función Objetivo quedará:
Máx. Z = 185X1 + 200X2$/mes ($/ton) (ton/mes) = $/mes
Restricciones.1. Materia Prima.
Nitrato 0.05X1 + 0.05X2 ≤ 1,100Fosfato 0.05X1 + 0.10X2 ≤ 1,800Potasio 0.10X1 + 0.05X2 ≤ 2,000% (ton/mes) = ton/mes ton/mes
2. No negatividad. Xi ≥0
Análisis Dimensional: Probado.
Solución por Método Gráfico.
Aplicando la metodología del Método Gráfico tenemos:
Calcular los puntos para graficar cada restricción.

Puntos a graficar:
(X1 , 0) (0, X2 )22,000 22,00036,000 18,00020,000 40,000
Nitrato 0.05X1 + 0.05X2 ≤ 1,100Fosfato 0.05X1 + 0.10X2 ≤ 1,800Potasio 0.10X1 + 0.05X2 ≤ 2,000
Graficar las restricciones y la región factible.
Calcular las coordenadas de los vértices de la región factible y el valor de la Función Objetivo.Los vértices "A" y "D" están en los ejes por lo que se pueden leer directamente de la gráfica, de la tabla de los puntos para graficar o bien se puede calcular. A continuación se ejemplifica el cálculo del vértice "A": 0.05X1 + 0.10 X2 = 1,800
X1 = 0C o m o X 1 = 0 y a q u e e s t á s o b r e e l e j e X 2, entonces sustituyendo en la ecuación, se tiene que X2 = 18,000, luego las coordenadas del vértice "A" son (0,18000).
Se pueden leer directamente las coordenadas del vértice "D" que son (20000,0).
El vértice "E" tiene de coordenadas (0,0).
Los vértices "B" y "C" están fuera de los ejes por lo que es necesario resolver las dos ecuaciones que forman cada uno de los vértices y resolverlas por simultáneas.
Vértice “B”: Fostato 0.05X1 + 0.10X2 = 1,800Nitrato -(0.05X1 + 0.05X2 = 1,100)

____________________0.05X2 = 700 X2 = 14,000
Sustituyendo X2 en una de las ecuaciones originales se tiene:Fosfato0.05X1+ 0.10 (14,000) = 1,800
X1 = 8,000Las coordenadas del vértice "B" son (8000,14000)
Vértice "C": Potasio 0.10X1 + 0.05X2 = 2,000Nitrato -(0.05X1 + 0.05X2 = 1,100)
_____________________ 0.05X1 = 900
X1 = 18,000
Sustituyendo X1 se tiene: 0.10 (18,000) + 0.05X2 = 2,000 X2 = 4,000
Las coordenadas del vértice "C" son (18000,4000).
En la siguiente tabla, se tiene un resumen de las coordenadas de cada vértice de la región factible y el valor de la Función Objetivo:
Vértice Coordenadas(X1, X2)
Z = 185X1 + 200X2($/mes)
ABCDE
0 18,0008,000 14,00018,000 4,00020,000 00 0
3600,0004280,0004130,0003700,000
0
Encontrar la solución óptima del problema.Con base en la tabla anterior, se determina que la solución óptima está en el vértice "B" y es:X1= 8,000X2= 14,000Máx. Z = $4280,000
Interpretación de la Solución Óptima.En la interpretación, es importante fijarse en el tipo de variables que maneja el problema. Las variables pueden ser de dos tipos: discretas y continuas. Las "variables discretas" se pueden expresar solo en valores enteros, mientras que las "variables continuas" se pueden expresar en cualquier valor, entero o fraccionado. Este problema tiene variables continuas por lo que se puede hacer la siguiente interpretación:El programa de producción para el siguiente mes será 8,000 toneladas del fertilizante 5-5-10 (X1= 8,000) y 14,000 toneladas del fertilizante 5-10-5 (X2= 14,000) para tener la máxima utilidad de $4280,000 (Máx. = 4280,000).Después de hacer este programa de producción se tendrán 500 toneladas sobrantes de Potasio.
MAX. Z

METODO GRAFICO: PROBLEMAS PROPUESTOS
1. (MAX) X0 = 4X1 + 3X2 Sujeto a:
2X1 + 3X2 ≤ 6-3X1 + 2X2 ≤ 3 2X2 ≤ 5 2X1 + X2 ≤ 4
X1 , X2 ≥ 0
2. (MAX) X0 = 3X1 + 5X2 Sujeto a:
2X1 + X2 ≤ 230 X1 + 2X2 ≤ 250 X2 ≤ 120 X1 ≥ 150
X1 , X2 ≥ 0
3. (MAX) X0 = 2X1 + X2 Sujeto a:
X1 - X2 ≤ 10 2X1 - X2 ≤ 40
X1 , X2 ≥ 0
4. (MAX) X0 = 4X1 + 14X2 Sujeto a:
2X1 + 7X2 ≤ 217X1 + 2X2 ≤ 21
7. (MAX) X0 = 3X1 + 5X2 Sujeto a:
2X1 + 2X2 ≤ 230 X1 + 2X2 ≤ 250 X2 ≤ 120
X1 , X2 ≥ 0
8. (MAX) X0 = 3X1 + 9X2 Sujeto a:
X1 + 4X2 ≤ 8X1 + 2X2 ≤ 4
X1 , X2 ≥ 0
9. (MAX) X0 = 6X1 - 2X2 Sujeto a:
2X1 - X2 ≤ 2 X1 ≤ 4
X1 , X2 ≥ 0
10. (MAX) X0 = 1500X1 + 2000X2 Sujeto a:
X1 + X2 ≤ 750 X1 ≤ 2503 X1 + 5X2 ≤ 1350
X1 , X2 ≥ 0

X1 , X2 ≥ 0
5. (MAX) X0 = 3X1 + 2X2 Sujeto a:
2X1 + X2 ≤ 23X1 + 4X2 ≥ 12
X1 , X2 ≥ 0
6. (MAX) X0 = 3X1 + 2X2 Sujeto a:
X1 - 2X2 ≤ 8-4X1 + 5X2 ≤ 20 4X1 + X2 ≤ 12 X2 ≤ 9/2 X1 ≤ 6
X1 , X2 ≥ 0
11. (MIN) X0 = 6X1 Sujeto a:
3X1 + 2X2 ≥ 12 X1 - X2 ≤ 5 4X1 + X2 ≤ 12 X2 ≥ 9/2
X1 , X2 ≥ 0
12. (MIN) X0 = 4X1 + X2 Sujeto a:
3X1 + X2 = 34X1 + 3X2 ≥ 6 X1 + 2X2 ≤ 3
X1 , X2 ≥ 0
CAPÍTULO III: EL MÉTODO SIMPLEX
3.1 Definición: Podemos definir el método simplex como un algoritmo iterativo que converge al óptimo (cuando este existe) en un conjunto finito de iteraciones.
Aun cuando el método gráfico no resulta “práctico” para resolver programas lineales, dado que usualmente en la práctica éstos incluyen un gran número de variables. Sin embargo este método demuestra los conceptos básicos para desarrollar la técnica algebraica. Como vehículo de explicación tomemos el siguiente ejemplo numérico:
(MAX) X0 = 4X1 + 3X2
Sujeto a:
2X1 + 3X2 ≤ 6
-3X1 + 2X2 ≤ 3
2X2 ≤ 5
2X1 + X2 ≤ 4
X1 , X2 ≥ 0
Este ejemplo muestra geométricamente que a fin de determinar la solución óptima es necesario considerar únicamente los puntos extremos (o esquina) del espacio de soluciones.

El desarrollo del método simplex está basado en el uso de la forma estándar (en la cual todas las restricciones –excepto la restricción de no negatividad se convierten en ecuaciones) a fin de hacer la transición de las representaciones gráficas a las algebraicas. Esto se logra incorporando las variables de holgura en el orden Xn+1 , Xn+2 , Xn+1 ; en cada restricción y en la función objetivo con coeficiente cero, donde n = n° restricciones. Luego, el programa lineal se presenta como sigue:
(MAX) X0 = 4X1 + 3X2 + 0X3 + 0X4 + 0X5 + 0X6
Sujeto a:
2X1 + 3X2 + X3 = 6 …. (I)
-3X1 + 2X2 + X4 = 3 …. (II)
2X2 + X5 = 5…. (III)
2X1 + X2 + X6 = 4…. (IV)
X1 , X2 , X3 , X4 , X5 , X6 ≥ 0
3.2 Determinación algebraica de los puntos extremos
El citado ejemplo muestra que el espacio de soluciones del problema (ABCDE) puede ser representado por las ecuaciones I a IV junto con las restricciones de no negatividad. Las restricciones de no negatividad serán tomadas en cuenta implícitamente considerando las soluciones no negativas de las ecuaciones I a IV. Por consiguiente, poniendo a parte las restricciones de no negatividad, el sistema se reduce a cuatro ecuaciones con seis incógnitas. La diferencia entre el número de incógnitas y el número de ecuaciones (igual a 2 en este ejemplo) tiene una relación directa con la característica distintiva de un punto extremo (comparada con un punto no extremo en el espacio de soluciones). Específicamente todo punto extremo del espacio ABCDE tiene dos variables (de seis) iguales a cero. La tabla siguiente muestra las variables cero para los puntos extremos A, B, C, D y E.
Punto extremo
Variables cero
A X1 = X2 = 0
B X2 = X6 = 0
C X3 = X6 = 0
D X3 = X4 = 0
E X1 = X4 = 0

Las observaciones anteriores indican que los puntos extremos se determinan directamente de la forma estándar estableciendo dos variables iguales a cero al mismo tiempo. Por ejemplo, X2 = X6 = 0 reduce las ecuaciones I a IV de la forma estándar a cuatro ecuaciones con cuatro incógnitas como sigue:
2X1 + X3 = 6
-3X1 + X4 = 3
+ X5 = 5
2X1 = 4
La solución (única) es X1 = 2, X3 = 2, X4 = 9 y X5 = 5. Esto, junto con X2 = X6 = 0 da el punto B en la Figura N° 03.
Figura N° 03:
El procedimiento seguido en el ejemplo anterior determina realmente las soluciones básicas de las ecuaciones simultáneas definidas por la forma estándar. En general, una solución básica para un conjunto de m ecuaciones lineales con n incógnitas se determina estableciendo n – m variables iguales a cero y luego resolviendo las m ecuaciones con n incógnitas siempre que la solución sea única. En este caso las n – m variables iguales a cero se denominan no básicas, y las restantes m variables se llaman básicas. Si la solución proporciona todas las variables básicas no negativas se conoce como solución básica factible; de otra manera es infactible. Un punto extremo factible, por consiguiente, se define como una solución básica factible.
La discusión anterior lleva al resultado general siguiente.

Propiedad fundamental: Los puntos extremos factibles de un programa lineal son totalmente determinados por las soluciones básicas factibles de las ecuaciones que lo definen.
La propiedad fundamental muestra como la definición geométrica de un punto extremo del espacio de soluciones se traduce algebraicamente como las soluciones básicas de las ecuaciones que representan el programa lineal.
3.3 Condiciones de optimidad y factibilidad del método simplex
La solución óptima de un programa lineal general con m ecuaciones y n incógnitas puede obtenerse resolviendo nC m = n! / [m! (n – m)!] conjuntos de ecuaciones simultáneas. Este procedimiento es ineficiente. Primero, el número de soluciones básicas posibles puede ser demasiado grande. Segundo, muchas de estas soluciones pueden ser infactibles o no existentes. En el anterior únicamente 5 de los 15 puntos extremos posibles (6C 4) son factibles. Tercero, la función objetivo juega un papel pasivo en el cálculo, ya que es utilizada únicamente después que todas las soluciones básicas factibles han sido determinadas.
El método simplex está diseñado específicamente para evitar estas ineficiencias. El enfoque consiste en partir de una solución básica factible (esto es, un punto extremo factible) y luego pasar sucesivamente a través de una sucesión de soluciones básicas factibles (no redundantes), de tal manera que cada nueva solución tenga la facultad de mejorar el valor de la función objetivo.
La base del método simplex que garantiza generar tal sucesión de soluciones básicas está formada por dos condiciones fundamentales.
1. La condición de optimidad asegura que nunca se encontrará una solución inferior (relativa al punto de solución actual).
2. La condición de factibilidad garantiza que partiendo de una solución básica factible, únicamente se encontrarán durante el cálculo soluciones básicas factibles.
Para ayudar a desarrollar las dos condiciones, el programa lineal en forma estándar se presenta en una forma tabular tal como se muestra a continuación, donde:
Cj : Coeficientes de las variables en la función objetivo.
bi :Constantes del lado derecho.
Xk : Variables básicas.
Ci : Coeficientes de las variables básicas en la función objetivo.
Zj : Valor alcanzado por la función objetivo en cada etapa.
Zj – Cj : Renglón de evaluación neta, mide el nivel de optimidad alcanzado por la función objetivo en cada iteración.
El método simplex inicia con una solución básica factible (o punto extremo) la cual para este ejemplo debe tener dos variables iguales a cero (de las seis). Se obtiene así una solución básica factible inicial obvia X1 = X2 =0. Esto inmediatamente da (sin ningún cálculo adicional) la solución de inicio con todas las variables de holgura con valores X3 =6, X4 =3, X5 =5 y X6 =4. Las variables de holgura proporcionan una solución obvia de inicio en este caso porque (1)

sus coeficientes en las restricciones forman una matriz identidad, donde los elementos diagonales son unos y todos los elementos restantes son ceros y (2) las constantes del lado derecho de las ecuaciones siempre son no negativas (propiedad de la forma estándar). Una forma conveniente de registrar la información sobre la solución de inicio es la tabla siguiente.
CJ 0 0 0 0 4 3
Ci Xk
BASE
bi X3 X4 X5 X6 X1 X2
0 X3 6 1 0 0 0 2 3
0 X4 3 0 1 0 0 -3 2
0 X5 5 0 0 1 0 0 2
0 X6 4 0 0 0 1 2 1
Zj 0 0 0 0 0 0 0
Zj - Cj 0 0 0 0 -4 -3
0 X3 2 1 0 0 -1 0 2
0 X4 9 0 1 0 3/2 0 7/2
0 X5 5 0 0 1 0 0 2
4 X1 2 0 0 0 1/2 1 1/2
Zj 8 0 0 0 2 4 2
Zj - Cj 0 0 0 2 0 -1
3 X2 1 1/2 0 0 -1/2 0 1
0 X4 11/2 -7/4 1 0 13/4 0 0
0 X5 3 -1 0 1 1 0 0
6/2 = 3
4/2 = 2
Variable entrante
Variable saliente
2/2 = 1
9/7/2 = 18/7 = 2.57
5/2 = 2.50
2/1/2 = 4

4 X1 3/2 -1/4 0 0 3/4 1 0
Zj 9 1/2 0 0 3/2 4 3
Zj - Cj 1/2 0 0 3/2 0 0
La columna titulada básica contiene las variables básicas (actuales) X3, X4, X5, X6. La columna solución da los valores actuales de las variables básicas; de tal manera que X3 = 6, X4 = 3, X5 = 5, X6 = 4. Cada ecuación en la tabla estará identificada por la variable asociada en la columna marcada básica. Las variables no básicas actuales son aquellas que no aparecen en la columna básica y sus valores son cero, esto es X1 = X2 =0. Los valores asignados a las variables proporcionan X0 = 0, como se muestra en la columna solución.
El paso siguiente es determinar una nueva solución básica factible (punto extremo) con un valor mejorado de la función objetivo. El métod7o simplex hace esto eligiendo una variable actual no básica que se va a aumentar arriba de cero siempre que su coeficiente en la función objetivo tenga la virtud de mejorar el valor de X0. Ya que un punto extremo (en este ejemplo) debe tener dos variables no básicas, una de las variables básicas actuales debe hacerse no básica en el nivel cero siempre que la nueva solución sea factible. La variable no básica actual debe hacerse básica; usualmente se le conoce como la variable que entra y está determinada por la condición de optimidad. Esta variable se identifica inspeccionando el renglón de evaluación neta (Zj – Cj ) como aquel coeficiente con el menor valor negativo – si el caso es de maximización o el mayor valor positivo – si el caso es de minimización asociado a esta en la función objetivo. La variable básica actual que va a ser no básica se conoce como variable que sale y está determinada por la condición de factibilidad. Esta se determina como aquella asociada al renglón cuyo cociente resulte siendo el menor entre los elementos de la columna bi respecto a los elementos mayores que cero de la columna asociada a la variable entrante. Si se presentara el caso de empate en dichos cocientes, se optará por efectuar la evaluación respecto a la columna contigua a la columna bi hasta que se rompa dicho empate. El elemento que surge de la intersección de la columna que identifica a la variable entrante con el renglón que identifica a la variable saliente recibe el nombre de elemento o número pivote, los demás elementos contenidos en la columna del elemento pivote reciben el nombre de semipivotes. El renglón que contiene al elemento pivote recibe el nombre de renglón pivote. En cada fase iterativa se deberá calcular el nuevo renglón pivote aplicando la fórmula:
Nuevo renglón pivote = Renglón pivote anterior/n° pivote
Para el cálculo de los demás renglones se aplicará la formula:
Nuevo renglón = renglón anterior – (semipivote) (nuevo renglón pivote)
El valor óptimo se habrá alcanzado –en el caso de maximización, cuando no exista ningún elemento negativo en el renglón de evaluación neta (Zj – Cj). En el caso de minimización este se alcanzará cuando no exista ningún elemento positivo en dicho renglón. Así; en el presente caso, la solución se presentará como:
SX0 = {X1 = 3/2; X2 = 1; X4 = 11/2; X5 = 3; X3 = X6 = 0; (max) X0 = 9}
GeneralizaciónEl método simplex busca óptimos adyacentes a partir una solución basal factible. En todos los ejemplos de resolución que se han visto hasta ahora se han empleado en la solución inicial

factible las variables de holgura. Sin embargo, el empleo de variables de holguras no es posible cuando se tiene restricciones de tipo ≥ o =. En estos casos se recurre al empleo de variables artificiales para resolver el Pl mediante Simplex. Veamos un ejemplo:
(MIN) Z = 24X1 + 15X2
Sujeto a:
0.5X1 + X2 ≤ 121.5X1 + X2 ≤ 2424X1 + 20X2 ≥ 216X1 , X2 ≥ 0
La versión estandarizada del problema queda:(MIN) Z = 24X1 + 15X2 + 0X3 + 0X4 + 0X5
Sujeto a:
1/2X1 + X2 + X3 = 123/2X1 + X2 + X4 = 24 24X1 + 20X2 - X5 = 216X1 , X2 , X3 , X4 , X5 ≥ 0
Debido a que el método exige variables positivas, no es aceptable que en la tercera restricción la variable de exceso X5 tome un valor negativo. Para resolver el problema, inventaremos variables basales para cada restricción que lo necesite. Debido a que dichas variables no tienen ningún significado para el problema que se está resolviendo las denominaremos variables artificiales.
Recurriendo a esta opción, la nueva forma estándar queda:(MIN) Z = 24X1 + 15X2 + 0X3 + 0X4 + 0X5 + MX6
Sujeto a:
1/2X1 + X2 + X3 = 123/2X1 + X2 + X4 = 24 24X1 + 20X2 - X5 + X6 = 216X1 , X2 , X3 , X4 , X5 , X6 ≥ 0
Reordenando el PL se tiene:(MIN) Z = 0X3 + 0X4 + MX6 + 0X5 + 24X1 + 15X2
Sujeto a:
12 = X3 + 1/2X1 + X2 24 = X4 + 3/2X1 + X2 216 = X6 - X5 + 24 X1 + 20X2 X3 , X4 , X6 , X5 , X1 , X2 ≥ 0

CJ 0 0 M 0 24 15
Ci Xk
BASE
bi X3 X4 X6 X5 X1 X2
0 X3 12 1 0 0 0 1/2 1
0 X4 24 0 1 1 0 3/2 1
0 X6 216 0 0 1 -1 24 20
Zj 216M 0 0 M -M 24M 20M
Zj - Cj 0 0 0 -M 24M-24
20M-15
0 X3 15/2 1 0 -1/48 1/48 0 7/12
0 X4 21/2 0 1 -1/16 1/16 0 -1/4
24 X1 9 0 0 1/24 -1/24 1 5/6
Zj 216 0 0 1 -1 24 20
Zj - Cj 0 0 1-M -1 0 5
0 X3 6/5 1 0 -1/20 1/20 -7/10 0
0 X4 66/5 0 1 -1/20 1/20 3/10 0
15 X2 54/5 0 0 1/20 -1/20 6/5 1
Zj 162 0 0 3/4 -3/4 18 15
Zj - Cj 0 0 3/4-M -3/4 -6 0
Variable saliente
Variable entrante
216/2 4= 9
9/5/6 = 54/5 = 10.80
12/1/2 = 24
24/3/2 = 16
15/2/7/12 = 12.85

Para garantizar que el óptimo encontrado sea el correspondiente al problema original debemos forzar a que el algoritmo deje fuera de la base a las variables artificiales. La idea consiste en incorporar a la función objetivo las variables artificiales con un coeficiente +M, donde M es una constante positiva lo suficientemente grande para la escala del problema (en caso de minimización debemos emplear solo +M, si el caso fuera de maximización estas variables artificiales se incorporan con coeficiente -M). Luego, si las variables artificiales tomaran un valor positivo, la función objetivo se vería tremenda mente castigada en su valor. Por lo tanto, el método se encargaría de hacer que las variables artificiales sean nulas al maximizar (o minimizar) la función objetivo.
CAPÍTULO IV: MODELOS DE REDES
Los modelos de redes y técnicas basadas en el análisis de redes han permitido, como es el caso de transporte y asignación, resolver exitosamente muchos problemas administrativos. Adicionalmente a ello, presentamos tres casos : El problema de la ruta más corta, El problema del árbol de extensión mínima y El problema del flujo máximo, mostrándose en cada caso la forma de desarrollar y resolver el modelo para obtener la solución óptima.
4.1 EL PROBLEMA DE LA RUTA MÁS CORTA
Como su nombre lo indica, el objetivo es determinar la ruta más corta o el camino más reducido a través de la red. Esto se ilustra refiriéndonos a la situación que enfrenta la Gorman Construccion Company. La Gorman tiene diversos proyectos de construcción distribuidos en un área de tres condados. En ocasiones los sitios de las construcciones se ubican hasta a 50 millas de distancia de la oficina general de la empresa. Como se efectúan varios viajes al día para llevar personal equipo y suministros, hacia y desde los lugares de construcción, los costos relacionados con las actividades de transporte son importantes. Se pueden describir mediante una red de calles, carreteras y autopistas las alternativas de transporte entre los sitios y la oficina para cualquier lugar de construcción determinado. En la red que se muestra en la figura N° 01 adjunta se describen las alternativas de viaje entre 6 de los lugares de construcción más recientes de la Gorman. Los pequeños círculos o nodos de la red corresponden a los lugares. Las calles, carreteras y autopistas son los arcos de la misma. Sobre los arcos correspondientes se indican las distancias entre los lugares. Obsérvese que la longitud de los arcos no necesariamente corresponde a la distancia recorrida. La firma Gorman pretende determinar las rutas o trayectos que minimizan la distancia total que se viaja desde la oficina hasta cada sitio.
Figura N° 01: Red de caminos para el problema de ruta más corta de la Gorman Company.
2
4
7
3
615 6
5
17
Distancia sobre la carretera (en millas)

Un algoritmo de ruta más corta:
La resolución del problema requiere determinar la vía más corta desde sus oficinas (el nodo 1) hasta cada uno de los otros nodos de la red. El algoritmo que se presenta utiliza un procedimiento de rotulación para encontrar la distancia más reducida desde el nodo 1 hasta cada uno de los demás. Conforme se ejecutan los pasos del procedimiento de rotulación, se elabora un rótulo (ó etiqueta) para cada nodo, el cual consta de dos números encerrados entre corchetes. El primer número del rótulo de un nodo específico señala la distancia desde el nodo 1 hasta ese nodo, en tanto que el segundo indica el nodo precedente sobre la ruta, desde el nodo 1 hasta ese nodo. Se coloca la etiqueta para cada nodo directamente encima o abajo del nodo. Por ejemplo, un rótulo para un nodo específico podría ser como se muestra en la Figura N° 02.
Figura N° 02:
En cualquier etapa del procedimiento de rotulación, se dice que un nodo está rotulado o no. Un nodo con rótulo es aquel que ya se ha identificado un camino desde el nodo 1 hasta ese nodo, y un nodo no rotulado es obviamente el que no tiene todavía un camino desde el nodo 1 hasta ese nodo. Para los nodos rotulados, se dice también que el nodo ha sido (rotulado) etiquetado en forma permanente o en forma tentativa. Es decir, cuando el algoritmo ha permitido determinar la distancia más corta desde el nodo 1 hasta cada nodo específico, se dice que tal nodo ha sido rotulado en forma permanente, si no se ha determinado aún dicha distancia dicho nodo tendrá una marcación (rotulación) tentativa.
Nota: No necesariamente la longitud del arco guarda proporción con la distancia correspondiente.
[0, I]
2
[13, 3]
Este valor indica que 13 es la distancia desde el nodo 1 hasta l nodo 2.
Este valor indica que el nodo que precede a este nodo (el nodo 2) sobre la ruta que viene del nodo 1 es el nodo 3.
El proceso de rotulación se inicia asociado al nodo 1 la etiqueta permanente [0, I]. La I señala simplemente que el nodo 1 es el inicial; y el 0, que la distancia entre el nodo 1 y el mismo nodo es cero. Para diferenciar los nodos con los rótulos tentativos de los permanentes, se sigue la práctica de sombrear éstos últimos en la red. Además, se utiliza una flecha para señalar el nodo con etiqueta permanente que se investiga en cada uno de los pasos del algoritmo de rotulación. La identificación inicial para la red de la empresa Gorman se muestra en la Figura N° 03. El único nodo con marcado permanente es el 1.
Figura N° 03:
Para realizar el primer paso o iteración del procedimiento de rotulado, se debe considerar que cada nodo puede alcanzarse en forma directa desde el nodo 1; por ello, se observan los nodos 2 y 3. Considérese por el momento el nodo 2. Se observa que la distancia directa desde el nodo 1 al nodo 2 es de 15 millas. Por tanto, puede asignarse tentativamente la etiqueta [15, 1] al nodo 2. El primer número de la etiqueta señala que se puede llegar al nodo 2 recorriendo 15 millas, y el segundo número indica que el nodo que precede al nodo 2 sobre la ruta es el nodo 1. Considerando ahora el nodo 3, vemos que su etiqueta correspondiente es [10, 1]. En la figura N° 04 se muestran los resultados obtenidos hasta este punto. Las etiquetas de los nodos 2 y 3 son tentativas.
Figura N° 04:
1
2
4
3
6
5
7
3
4
10
615 6
5
17
4
2
Distancia sobre la carretera (en millas)
Oficina de la Gorman
[0, I]

En referencia a la figura anterior se consideran ahora todos los nodos que tienen rótulos tentativos y se identifica el que tiene el menor valor de distancia; así, se elige el nodo 3. Aquí ya se ha identificado la ruta más corta –o mejor- para llegar al nodo 3 y, por tanto, se etiqueta en forma permanente tal nodo con una distancia de 10 millas. Sombreando dicho nodo 3 para señalar que es un nodo con etiqueta permanente y, añadiendo una flecha para indicar que se utilizará el nodo 3 para iniciar el siguiente paso del proceso de rotulación, obteniéndose la red siguiente:
Figura N° 05:
Se continúan todos los nodos que no tienen etiqueta permanente y que pueden alcanzarse en forma directa desde el nodo 3. Por ello se evalúan los nodos 2 y 5. Obsérvese que la distancia directa del nodo3 a nodo 2 es de 3 millas, y la distancia directa del nodo 3 al nodo 5 es de 4 millas. Como la etiqueta permanente para el nodo3 indica que la distancia más corta para llegar al nodo 3 es de 10 millas, se observa que se puede llegar al nodo 2 en 10 + 3 = 13 millas,
1
2
4
3
6
5
7
3
4
10
615 6
5
17
4
2
[0, 1]
[15, 1]
[10, 1]
1
2
4
3
6
5
7
3
4
10
615 6
5
17
4
2
[0, 1]
[15, 1]
[10, 1]
y al nodo 5 en 10 + 4 = 14 millas. Por ello, se modifica la etiqueta tentativa del nodo 2, y se le asigna al nodo 2 [13, 3] para indicar que ya se ha encontrado ahora una ruta que va del nodo 1 al nodo 2, que tiene una distancia de 13 millas y que el nodo que precede al nodo 2 en la ruta es el 3. De manera similar, la etiqueta tentativa para el nodo 5 es [14, 3], en seguida se evalúan todos los nodos con etiquetas tentativas para identificar el que tenga el menor valor de distancia en su etiqueta. Se observa que éste es el nodo 2 declarándose permanentemente etiquetado, debido a que se puede llegar al nodo 2, desde el 1, con la menor distancia posible de 13 millas, pasando por el 3.
Continuando con este proceso se observa que la ruta más corta desde el nodo 1 al nodo 7 es : 1-3-5-6-7 mostrada en la red siguiente:
Figura N° 06:
En la tabla siguiente se muestran las rutas más cortas para la red de transporte de la Cía. Gorman.
Tabla N° 01:
Nodo Ruta más corta desde el nodo 1
Distancia (en millas)
234
1-3-21-31-3-5-4
131018
1
2
4
3
6
5
7
3
4
10
615 6
5
17
4
2
[15, 1]
[10, 1]
[0, 1]
[13, 1]
[14, 3]
[18, 5]
[16, 5]
[22, 6]
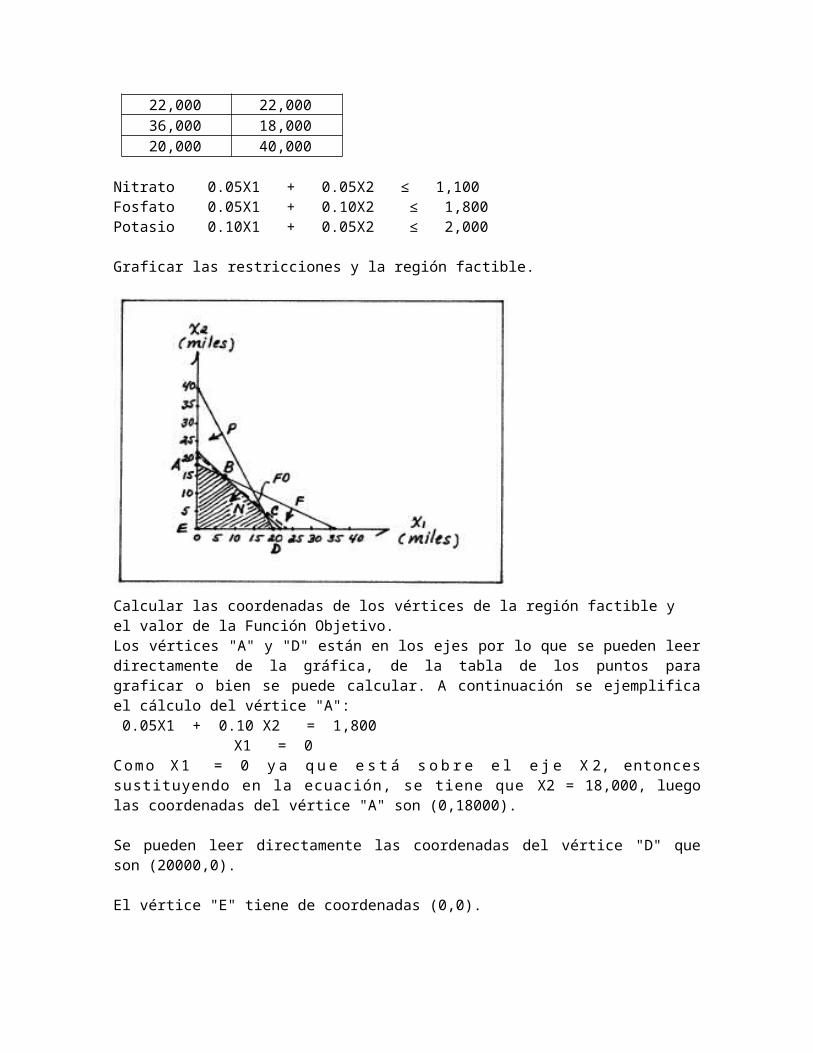
567
1-3-51-3-5-61-3-5-6-7
141622
4.2 EL PROBLEMA DEL ÁRBOL DE EXTENSIÓN MÍNIMA
El problema del árbol de extensión (expansión) mínima se refiere a utilizar las ramas (arcos) de la red para llegar a todos los nodos de la red, de manera que se minimice la longitud total de las ramas. Para ilustrar dicho problema se considera el diseño de un sistema de comunicaciones que afronta un centro regional de cómputo.
El Centro Regional de Cómputo del Suroeste debe instalar líneas especiales para comunicación computacional, a fin de conectar a cinco usuarios satélite con una computadora central. La Cía. Telefónica Local es la que instalará la nueva red de comunicaciones. Sin embargo, la instalación es una operación costosa. Con el propósito de reducir costos, el grupo de administración del centro desea que la longitud total de éstas nuevas líneas de comunicación sea lo más pequeña posible. Aunque se podría conectar la computadora central en forma directa a cada usuario, parece que sería más económico instalar una línea directa hacia algunos usuarios, y permitir que otros se enlacen con el sistema a través de los usuarios ya conectados. La determinación de este diseño de comunicaciones de longitud mínima constituye un ejemplo del problema del árbol de extensión mínima. En la figura adjunta se muestra la red para este problema, con las alternativas de conexión posibles y las correspondientes distancias. En seguida se explica el algoritmo que puede utilizarse para resolver este modelo de red.
Figura N° 07:
Algoritmo para el Árbol de Extensión Mínima:
1
3
2
4
6
5
20
30
10
30
40
50
40
4
302040Centro
Regional de Cómputo
Distancia (en millas) de líneas de comunicación que se requieren entre los distintos lugares.
Paso 1: Comenzar en forma arbitraria en cualquier nodo y conectarlo con el nodo más próximo. A éstos dos nodos se les denominan nodos conectados o conexos y a los nodos restantes se les denomina nodos no conectados o inconexos.
Paso 2: Identificar el nodo no conectado que esté más cerca de uno de los conectados. Deshacer los empates en forma arbitraria si son dos o más los nodos que califican como nodo más cercano. Agregar este nodo al conjunto de nodos conectados. Repetir este paso hasta que se hayan conectado todos los nodos.
Con referencia a la red mostrada en la Figura N° 07 y comenzando arbitrariamente en el nodo 1, se encuentra que el nodo más próximo es el nodo 2, con distancia 20. Utilizando línea gruesa para marcar los enlaces con los nodos 1 y 2, el paso 1 arroja el siguiente resultado:
Figura N° 08:
En el paso 2 se encuentra que el nodo inconexo más cercano de uno de los nodos es el 4, con distancia de 30 millas desde el nodo 1. Añadiendo el nodo 4 al conjunto de nodos conexos se obtiene el resultado siguiente:
Figura N° 09:
1
3
2
4
6
5
20
30
10
30
40
50
40
40
30
2040
2
540
Repitiendo el paso de agregar siempre el nodo no conexo que está más próximo al conjunto de nodos conexos de la red se obtiene finalmente el árbol de extensión mínima siguiente:
Figura N° 10:
Finalmente debemos señalar que para el problema del árbol de extensión mínima para el Centro Regional de Cómputo la solución se presenta como sigue:
Árbol de Extensión Mínima
Nodo Inicial Nodo FinalDistancia
(en millas)1 2 20
1
3
4
6
20
30
10
30
40
50
40
30
2040
1
3
2
4
6
5
20
30
10
30
40
50
40
40
30
2040
1443
4365
30102030
Longitud Total 110
4.3 EL PROBLEMA DEL FLUJO MÁXIMO
Considérese una red con un nodo de entrada, o nodo fuente (nodo que genera flujo, de manera que éste puede solamente salir del nodo, y no entrar al mismo), y uno de salida, o nodo antifuente (nodo que absorbe flujo, de manera que sólo puede recibirlo pero no emitirlo). El problema del flujo máximo pregunta ¿cuál es la cantidad máxima de flujo (es decir, vehículos, mensajes, líquidos, etc), que puede entrar y salir del sistema de red en un periodo determinado de tiempo? En dicho problema se intenta transmitir flujo sobre todas las ramas (arcos) de la red en la forma más eficiente posible. La cantidad de flujo está limitada debido a restricciones de capacidad en dichas ramas. Por ejemplo, los tipos de carretera limitan el flujo de vehículos en un sistema de transporte, en tanto que, los diámetros de las tuberías limitan el flujo de petróleo en un sistema de distribución. Al límite máximo sobre el flujo de una rama se le denomina capacidad de flujo de la rama. Aunque no se especifican cantidades para los nodos, se supone que el flujo que sale de un nodo es igual al flujo que ingresa.
Para ilustración, tomemos como referencia el sistema interestatal de carreteras norte-sur que pasa por Cincinnati, Ohio. El flujo de vehículos norte-sur llega a un nivel de 15000 vehículos por hora en las horas pico. Debido a un programa de mantenimiento de carreteras en verano, que exige el cierre temporal de carriles y una reducción en los límites de velocidad, un comité de planeación del transporte ha propuesto una red de rutas alternativas que pasa por Cincinnati. Las rutas alternativas incluyen otras carreteras, así como también calles de la ciudad. Debido a diferencias de velocidad y a los patrones de tráfico, las capacidades de flujo varían dependiendo de las calles o carreteras específicas que se utilizan. En la figura adjunta se muestra la red la red que se propone, incluyendo las capacidades de flujo sobre las ramas. Las capacidades de flujo se basan en la dirección del flujo. Por ejemplo, la sección de carretera, o rama 1-2 muestra una capacidad de 5000 vehículos por hora en el sentido 1-2; sin embargo, existe una capacidad de cero en el sentido 2-1. Ello significa que quienes planearon la red de carreteras no desean que fluyan vehículos del nodo 2 hacia el nodo 1. En términos lógicos, como el nodo 1 es la entrada; o fuente, y un sitio potencial de congestionamiento, sería indeseable permitir que fluya el tráfico hacia la intersección del nodo 1. En cualquier caso, este ejemplo muestra que las capacidades de flujo de las ramas pueden depender de la dirección del flujo. ¿Considera que la red del sistema de carreteras propuesto puede dar cabida a un flujo máximo, norte-sur, de 15000 vehículos por hora? ¿Cuál es el flujo máximo de vehículos que permite la red cada hora? ¿Qué tanto flujo se debe canalizar sobre cada rama?
Algoritmo de Flujo Máximo:
Paso 1: Encontrar cualquier camino que vaya del nodo origen al nodo de depósito y que tenga capacidades de flujo mayores que cero para todas las ramas del camino, en el sentido del flujo. Si no hay camino disponible, ya se ha llegado a la solución óptima.
Paso 2: Encontrar la menor capacidad de la rama, Pf , sobre el camino que se eligió en paso 1. Aumentar el flujo sobre la red enviando una cantidad de Pf sobre el camino elegido en el paso 1.
Paso 3: Para el camino que se eligió en el paso 1, reducir todas las capacidades de flujo de las ramas en el sentido del flujo, en Pf y aumentar las capacidades de flujo en las ramas en el sentido contrario, en la misma cantidad Pf . Volver al paso 1.
En seguida se muestran los cálculos para la red de flujo en carreteras.
Figura N° 11: Red del Sistema de Carreteras y Capacidades de Flujo (en miles por hora) para Cincinnati.
Iteración 1: El camino seleccionado es: 1-3-6-7; Pf que se determina mediante la rama 1-3, es 6. La red modificada queda como sigue:
1 6
4
3
2
5
7
5
0
0
803
10
32
2
0
7
1
0
07
5
0
6
0
3
0
5
Salida de Cincinnati (Sur)
Entrada de Cincinnati (Norte)
Iteración 2: El camino seleccionado es: 1-2-5-7; Pf que se determina mediante la rama 2-5, es 3. La red modificada queda como sigue:
1
4
6
3
25
7
0
5 0
7
3 0
0
8
13
0
1
0
5
3
2
2
6
5
0
0
0
7
00 6
1 61
6
6
Flujo total después de la iteración 1
1
4
6
3
25
7
0
5 0
7
3 0
0
8
13
0
1
0
5
3
2
2
6
5
0
0
0
7
00 6
1 61
6
6
Flujo total después de la iteración 2
2
3
0 3
3
5
9

Iteración 3: El camino seleccionado es: 1-2-3-5-7; Pf que se determina mediante la rama 1-2 (ó 2-3 , es 2. La red modificada queda como sigue:
Iteración 4: El camino seleccionado es: 1-4-6-7; Pf que se determina mediante la rama 6-7, es 1. La red modificada queda como sigue:
1
4
6
3
25
7
0
5 0
7
3
0
8
13
0
1
0
5
3
2
2
6
5
0
0
0
7
00 6
1 61
6
6
Flujo total después de la iteración 3
2
33
5
9
0
5
00
3
0
4
1
2
53
11
1
4
6
3
25
7
0
5 0
7
3
0
8
13
0
1
0
5
3
2
2
6
5
0
0
0
7
00 6
1 6
1
6
6
Flujo total después de la iteración 4
2
33
5
9
0
5
0
4
1
2
5
11
4
1
0
7
12
300
3

Iteración 5: El camino seleccionado es: 1-4-6-5-7; Pf que se determina mediante la rama 6-5, es 1. La red modificada queda como sigue:
Iteración 6: El camino seleccionado es: 1-4-6-3-5-7; Pf que se determina mediante la rama 3-5, es 1. La red modificada queda como sigue:
14
1
4
6
3
25
7
0
5 0
7
3
0
8
13
0
1
0
5
3
2
2
6
5
0
0
0
7
00 6
1 6
1
6
6
Flujo total después de la iteración 5
2
33
5
9
0
5
0
3
1
2
5
11
1
4
4
1
0
7
12
3
2
3
2
0
2
4
600 3 2
13
1
4
6
3
25
7
0
5 0
7
3
0
8
13
0
1
0
5
3
2
2
6
5
0
0
0
7
00 6
1 6
1
6
6
Flujo total después de la iteración 6
2
33
9
0
5
0
1
2
5
11
4
1
0
7
12
3
2
0
2
4
13
2
3
2 5
0
3
65
32
17
14

Los resultados del análisis del flujo máximo muestran que el sistema que se plantea de red de carreteras no puede manejar el flujo pico de 15000 vehículos por hora. Las personas que están planeando el transporte tendrán que ampliar la red de carreteras, aumentar las capacidades actuales del flujo en las ramas, o prepararse para enfrentar severos problemas de embotellamiento de vehículos. Si se amplía o modifica la red, otro análisis de flujo máximo permitirá determinar la magnitud de cualquier aumento en el flujo.
Comparando las capacidades final e inicial de flujo para todas las ramas de la red se puede determinar el patrón de flujo que se muestra en la figura adjunta.
1 42
3
32
1 6
4
3
2
5
7
5
73
3
2
7
1
5
3
6
3
Salida de Cincinnati (Sur)
Entrada de Cincinnati (Norte)
14
14
Rama inutilizada
Rama: 5-6
Capacidad Inicial ( Ci )
Capacidad Final ( Cf )
65
5 6
1 1
2 0
Ci - Cf = 1 – 2 = -1 = | -1 | = 1
Patrón de Flujo (Pf ) 5 6
1
Rama: 3-6
Capacidad Inicial ( Ci )
Capacidad Final ( Cf )
63
3 6
7 0
2 5
Ci - Cf = 7 – 2 = 5
Patrón de Flujo (Pf ) 3 6
5
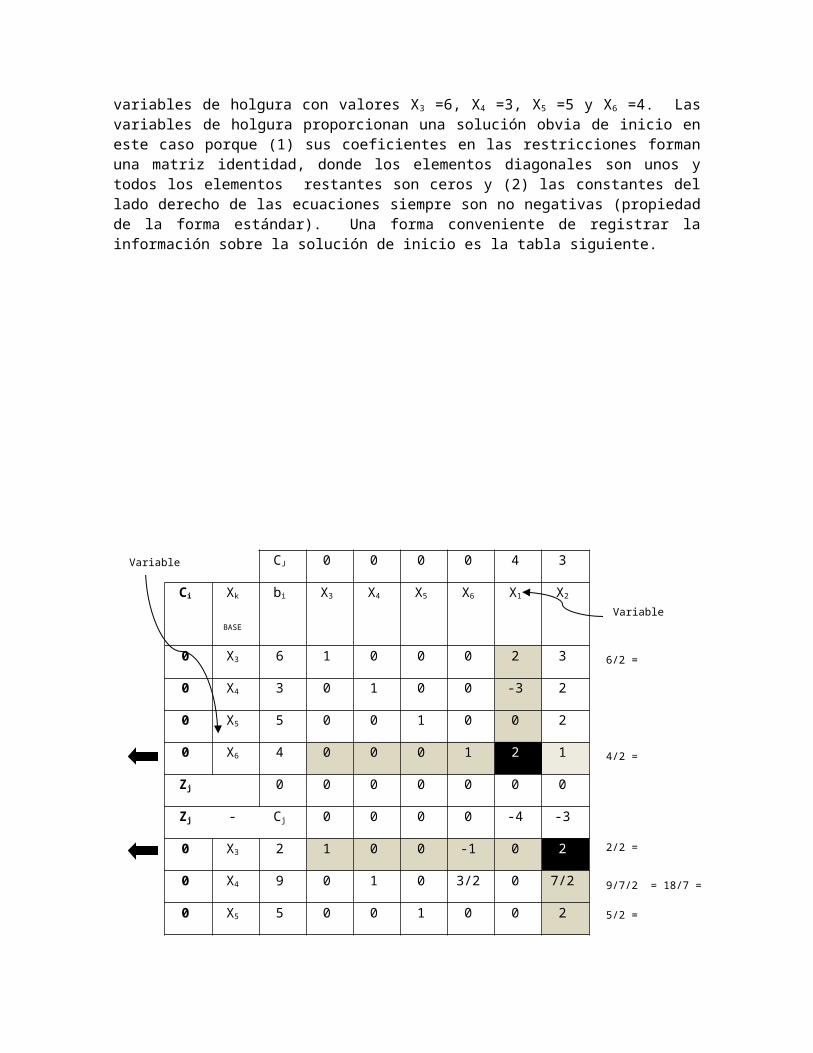
CAPITULO V: PROGRAMACION DE PROYECTOS CON PERT – CPM
5.1 Antecedentes históricos
Cuando la Marina de los Estados Unidos comenzó el proyecto del “submarino atómico Polaris”, se dieron cuenta de que no solo debían vencer las dificultades técnicas y científicas, sino también el problema de coordinación y control de estos enormes esfuerzos.
En este proyecto había 250 contratistas directos y más de 9000 subcontratistas, que suponían gran cantidad de recursos y factores humanos y , por tanto, era preciso encontrar una nueva técnica para desarrollar el proyecto con eficacia bajo un nivel razonable de coste y tiempo.
En colaboración con la Casa Booz Allen y Hamilton, se iniciaron los conceptos básicos del Sistema PERT (Proyect Evaluation and Review Technique), como instrumento de planificación, comunicación, control e información. El resultado de la aplicación de esta nueva técnica fue el ahorro de dos años en un proyecto de cinco de duración total.
Este éxito no solo impresionó en el campo militar, sino también en otros sectores, su utilización se extendió rápidamente en el campo industrial y comercial. Hoy prácticamente en los Estados Unidos todas las empresas utilizan PERT para controlar sus proyectos, especialmente las que están vinculadas con el Departamento de Defensa.
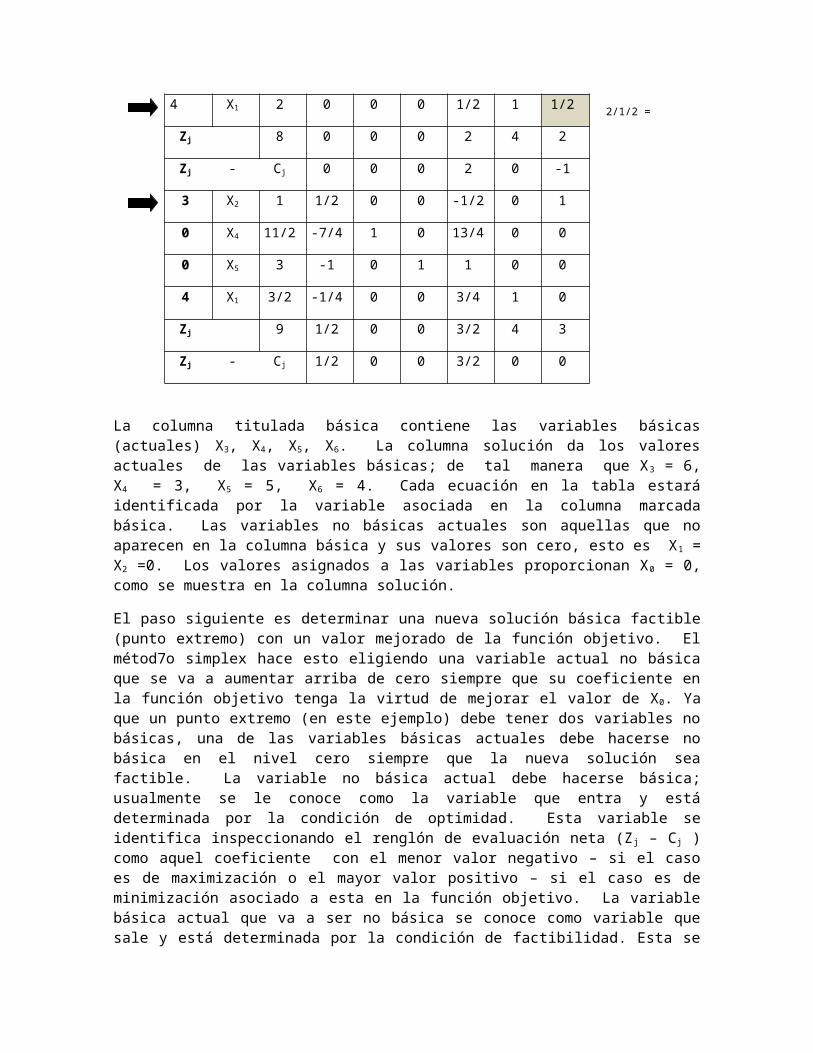
En 1957, la casa E. I. Du Pont desarrolló un sistema que pudiera mejorar el método de planificación y programación para los programas de construcción. Bajo la dirección de los señores J. E. Nelly y M. R. Walter, se creó la técnica CPM (Critical Path Method).
La técnica CPM es similar al PERT en muchos aspectos. La diferencia fundamental de estos dos sistemas consiste en que, en PERT, estima la duración de cada tarea u operación de los proyectos basándose simplemente en un nivel de coste, mientras que el CPM relaciona duración y coste, de lo cual se deriva una diversidad de duraciones para cada tarea u operación, y la elección de una duración adecuada se hará de modo que el coste total proyecto sea mínimo.
PERT y CPM son dos métodos usados por la dirección para, con los medios disponibles, planificar el proyecto a fin de lograr su objetivo con éxito. Estos métodos no pretenden sustituir las funciones de la dirección, sino ayudarla. PERT y CPM no resuelven los problemas por sí solos, sino que relacionan todos los factores del problema de manera que presentan una perspectiva más clara para su ejecución. Muchas veces las decisiones no son fácilmente tomadas por la dirección debido a su incertidumbre, pero PERT y CPM ofrecen un medio eficaz de reducir esta, y que las decisiones tomadas y acciones emprendidas sean las adecuadas al problema con gran probabilidad de éxito.
El mayor problema con quela dirección se enfrenta hoy en un proyecto complejo, es cómo coordinar las diversas actividades para lograr su objetivo. Los enfoques tradicionales sobre planificación y programación resultan inadecuados e insuficientes. Generalmente los diferentes grupos que trabajan para el proyecto tienen sus propios planes de realización independientes entre sí. Esta separación conduce a una falta de coordinación para el proyecto como conjunto. En cambio, las técnicas PERT y CPM preparan el plan mediante la representación gráfica de todas las operaciones que intervienen en el proyecto y las relacionan coordinándolas de acuerdo con las exigencias tecnológicas.
Además, estas técnicas proporcionan un método de actuación por excepción para la dirección; esto quiere decir que la dirección sólo actuará cuando surjan desviaciones respecto al plan previsto.
5.2 Aplicaciones de PERT Y CPM
El factor tiempo adquiere cada vez mayor importancia en las industrias. No sólo por la penalidad impuesta por el cliente respecto al plazo de entrega sino también por el concepto de costes. Una empresa mueve miles de dólares al mes; y si la dirección puede conseguir una reducción del tiempo de realización del proyecto con los mismos medios existentes y no causa por ello aumento en los costes, significará un beneficio. Esta economía indirecta puede ser conseguida mediante la mejora del método para la planificación, programación y control de proyectos.
En el pasado, la programación de un proyecto (en el tiempo) se hizo con poca planeación. La mejor herramienta conocida de “planeación” entonces era el diagrama de barras de Gantt, el cual especifica los tiempos de inicio y terminación de cada actividad en una escala de tiempo horizontal. Su desventaja es que la interdependencia entre las diferentes actividades (la cual controla principalmente el progreso del proyecto) no puede determinarse a partir del diagrama de barras. Las complejidades crecientes de los proyectos actuales han demandado técnicas de planeación más sistemáticas y más efectivas con el objeto de optimizar la eficiencia en la ejecución del proyecto. La eficiencia aquí implica efectuar la mayor reducción

en el tiempo requerido para terminar el proyecto mientras se toma en cuenta la factibilidad económica de la utilización de los recursos disponibles.
La aplicación de PERT se concentra en aquellas tareas en que hay incertidumbre en cuanto a los tiempos de terminación. Sin embargo, con CPM se supone que las experiencias pasadas nos libran de esta incertidumbre de tiempos, pero sí existe la de costes, ya que lo importante es el coste total mínimo y sobre éste se fijan los tiempos de los trabajos.
El caso de PERT, por ejemplo, es más indicado para los proyectos de investigación, en los cuales existe el problema de la estimación de los tiempos de trabajo y, por otro lado, tampoco hay antecedentes para calcular los costes por unidad de tiempo.
En cambio en CPM es aplicable a las construcciones en general en las cuales sea fácil estimar los tiempos y los costes, y lo que interesa es saber cuál es la combinación de coste-duración de cada tarea para que se pueda lograr el coste total mínimo del proyecto.
La programación de proyectos por PERT-CPM consiste en 3 fases básicas: planeación, programación y control.
La fase de planeación se inicia descomponiendo el proyecto en actividades distintas. Las estimaciones de tiempo para estas actividades se determinan luego y se construye un diagrama de red (o de flechas) donde cada uno de sus arcos (flechas) representa una actividad. El diagrama de flechas completo da una representación gráfica de las interdependencias entre las actividades del proyecto. La construcción del diagrama de flechas como una fase de planeación, tiene la ventaja de estudiar los diferentes trabajos en detalle, sugiriendo quizá mejoras antes de que el proyecto realmente se ejecute. Será más importante su uso en el desarrollo de un programa para el proyecto.
El objetivo último de la fase de programación es construir un diagrama de tiempo que muestre los tiempos de iniciación y terminación para cada actividad, así como su relación con otras actividades del proyecto. Además, el programa debe señalar las actividades críticas (en función del tiempo) que requieren atención especial si el proyecto se debe terminar oportunamente. Para las actividades no críticas el programa debe mostrar los tiempos de holgura que pueden utilizarse con ventaja cuando tales actividades se demoran o cuando se deben usar eficientemente recursos limitados.
La fase final en la administración de proyectos es la de control. Esto incluye el uso del diagrama de flechas y la gráfica de tiempo para hacer reportes periódicos del progreso. La red puede, por consiguiente, actualizarse y analizarse y si es necesario, determinar un nuevo programa para la porción del proyecto.
5.3 Representación por el Diagrama de Flechas (Red)
El diagrama de flechas muestra en forma gráfica el orden de precedencia entre las actividades del proyecto. Se utiliza comúnmente una flecha para representar una actividad, y la punta indica el sentido de avance del proyecto. La relación de precedencia entre las actividades se especifica utilizando eventos. Un evento representa un punto en el tiempo y significa la terminación de algunas actividades y el comienzo de nuevas. Los puntos inicial y final de una actividad, por consiguiente, están descritos por dos eventos usualmente conocidos como evento de comienzo y evento terminal. Las actividades que se originan de un cierto evento no pueden comenzar hasta que las actividades que concluyen en el mismo evento hayan terminado. En la terminología de la teoría de redes cada actividad está representada por un

arco dirigido y cada evento no necesita ser proporcional a la duración de la actividad ni tiene que dibujarse como una línea recta. La figura N° 01 muestra un ejemplo de una representación típica de una actividad (i, j) con su evento de comienzo “i” y su evento de terminación “j”. La figura N° 01 (b) muestra otro ejemplo donde las actividades (1, 3) y (2, 3) deben terminarse antes que pueda comenzar la actividad (3, 4). La dirección de avance de cada actividad se especifica asignando un número más pequeño al evento de comienzo comparado con el número de su evento terminal. Este procedimiento es especialmente conveniente para cálculos automáticos y es el que adoptará en adelante.
Figura N° 01:
En seguida se presentan algunas reglas útiles para la confección del diagrama de flechas:
Regla 1: Cada actividad está representada por una y solamente una flecha en la red. Ninguna actividad puede representarse dos veces en la red.
Regla 2: Dos actividades diferentes no pueden identificarse por los mismos eventos terminal y de comienzo. Una situación como ésta puede surgir cuando dos o más actividades pueden ejecutarse concurrentemente. Un ejemplo se muestra en la figura N° 02 (a) donde las actividades A y B tienen los mismos eventos finales. El procedimiento consiste en introducir una actividad figurada o ficticia ya sea entre A y uno de los eventos finales, o entre B y uno de los eventos finales. Las representaciones modificadas, después de introducir la actividad ficticia D se muestran en la figura N° 02 (b). Como resultado de usar D, las actividades A y B pueden ahora identificarse por eventos finales únicos. Debe notarse que una actividad ficticia no consume tiempo o recursos.
Figura N° 02:
i j 3
2
1
4
a b

Las actividades ficticias son también útiles al establecer relaciones lógicas en el diagrama de flechas, las cuales de otra manera no pueden representarse correctamente. Suponga que en cierto proyecto los trabajos A y B deben preceder a C. Por otra parte, el trabajo E está precedido por el trabajo B solamente. La figura N°03 (a) muestra la forma incorrecta ya que aunque la relación de A, B y C es correcta, el diagrama implica que E debe estar precedida tanto por A como B. La representación correcta usando f1 ficticia se muestra en la figura N° 03 (b). Ya que f1 no consume tiempo (o recursos) las relaciones de precedencia indicadas están satisfechas.
Figura N° 03:
Regla N° 03: A fin de asegurar la relación de precedencia correcta en el diagrama de flechas, las siguientes preguntas deben responderse cuando se agrega cada actividad a la red.
(i) ¿Qué actividad(es) debe(n) terminarse inmediatamente antes de que esta actividad pueda comenzar?
(ii) ¿Qué actividad(es) deben seguir a esta actividad?(iii) ¿Qué actividad(es) deben efectuarse concurrentemente con esta actividad?
1 2
3131
22
A
B
(a)
2
1 3
2
1 3
A
B
D
A
D B
B
BD
A
DB
(b)
1
1
2
AA
C
B E
f1
(a) (b)

Esta regla se explica por sí misma. Realmente permite verificar (y volver a verificar) las relaciones de precedencia cuando se progresa en el desarrollo de la red.
Ejemplo N° 01: Supongamos que tenemos seis actividades bien definidas A, B, C, D, E y F, siendo las relaciones de precedencia entre ellas las siguientes:
1. A y B pueden comenzar simultáneamente después de la actividad de T.P. (tiempo de preparación)*.
2. Actividades C, D y E pueden empezar solamente cuando termine la A.3. Al terminar la actividad B, se comienza sólo la E.4. Antes de empezar la F, deben estar terminadas las C, D y E.
Generalmente en los modelos de red para proyectos hay un tiempo de preparación antes de ejecutarlos. En este tiempo, se realiza una serie de actividades restrictivas, por ejemplo: petición de autorización, espera de la última decisión para el lanzamiento del proyecto, preparación de financiación, condiciones estacionales, etc.
Ahora podemos dibujar la red paso a paso.
Para el primer paso podemos trazar las siguientes flechas:
Figura N° 04:
Tanto la longitud como la dirección de la flecha no tienen ningún significado vectorial. Por eso, la forma de dibujar la red es completamente a gusto del planificador.
El segundo paso es el siguiente:
Figura N° 05:
0 1
3
2
T.P.
A
B
C

El tercer paso es añadir una actividad E después del suceso 3, pero uniéndolo con la actividad A con una flecha ficticia.
Figura N° 06:
El cuarto paso es dibujar la actividad F detrás de las C, D y E.
Figura N°07:
2
A
D
E
0 1
3
2
T.P.
A
B
C
D
E
f1
2 4
T.P.
A
C
D

Para facilitar la denominación de las actividades con los números naturales, es conveniente crear otra actividad ficticia f2 para la C o la D, aumentando un suceso entre (2) y (5) que es, en nuestra Figura N° 07, el suceso 4.
Ejercicios:
1. Prisney Productions hace películas de animación y, recientemente ha firmado un contrato para producir una nueva película que incluye una pequeña caricatura a manera de inicio. Como productor ejecutivo, se le ha solicitado a usted, elabore la red correspondiente al proyecto, considerando las tareas que necesitan llevarse a cabo así como el orden de precedencia entre aquellas. Estas aparecen en la tabla adjunta, donde también se incluye la estimación de sus tiempos de terminación.
TAREA DESCRIPCIÓN PREDECESOR INMEDIATO
TIEMPO DE TAREA
(SEMANAS)
A Hacer la animación Ninguna 12
B Preparar los créditos Ninguna 2
C Instrumentar la música Ninguna 8
D Grabar la música C 2
E Mezclar la música A, B, D 1
F Mezclar la música y la animación Ninguna 8
G Preparar el avance E 1
H Editar E, F 2
I Hacer las copias G, H 1
2. Construya el diagrama de flechas que comprenda las actividades A, B, C, …, L tal que se satisfagan las relaciones siguientes:
A, B, C, las primeras actividades del proyecto pueden comenzar simultáneamente.
A y B preceden a D. B precede a E, F y H. F y C preceden a G. E y H preceden a I y J. C, D, F y J preceden a K.
0 1
3 5
B
E
f1
6
f2
F
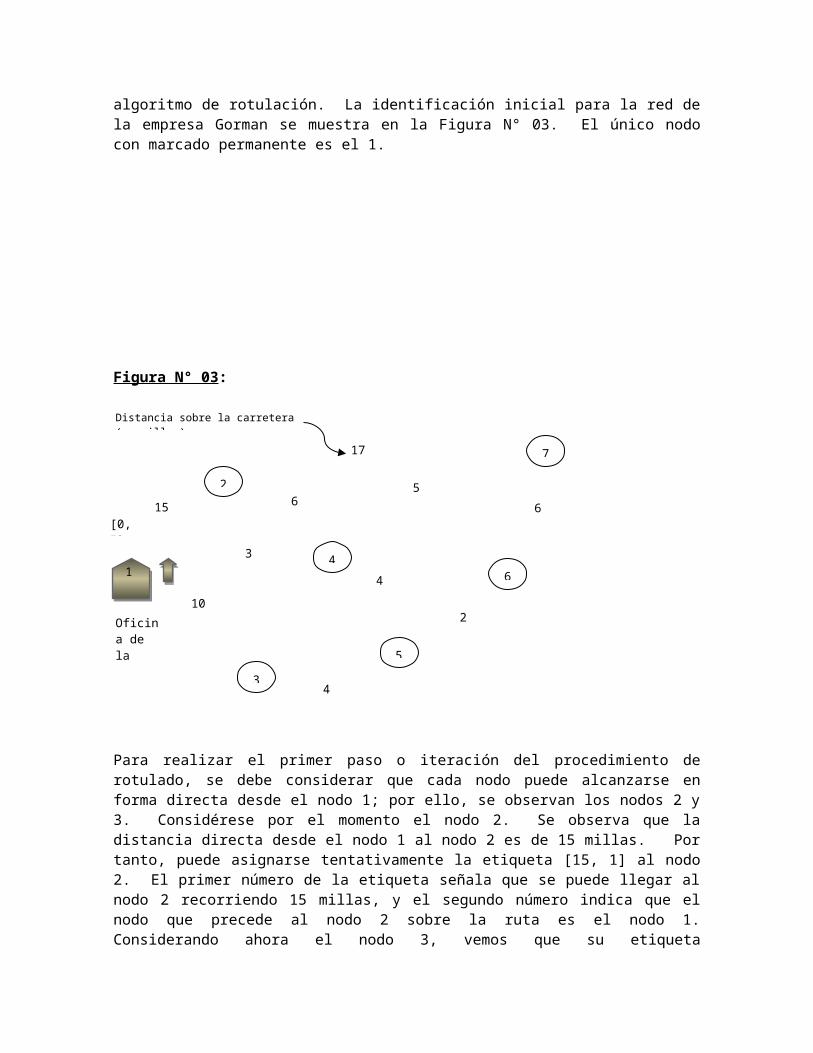
K precede a L. I, G, y L son las actividades terminales del proyecto.
3. Construya el diagrama de flechas correspondiente al proyecto que comprende las actividades que aparecen en el cuadro adjunto.
Tarea Predecesoras inmediatas
Duración (semanas)
A Ninguna 8B Ninguna 7C A 5D B 2E A,B 4F C, D, E 6
CAPÍTULO VI: ADMINISTRACION DE PROYECTOS USANDO TIEMPOS DETERMINÍSTICOS (CPM)
6.1 Cálculos de la Ruta Crítica
La aplicación de las técnicas PERT y CPM deben proporcionar un programa, especificando las flechas de inicio y terminación de cada actividad. La construcción del diagrama de flechas constituye el primer paso hacia el logro de esa meta. La determinación de los tiempos de inicio y de terminación de las diversas actividades de un proyecto requieren cálculos especiales, esto; esto en razón a las interacciones existentes entre aquellas. Estos cálculos se efectúan directamente en el diagrama de flechas empleando aritmética simple. El resultado final es clasificar las actividades en críticas y no críticas. Se dice que una actividad es crítica si una demora en su comienzo causará demora en la fecha de terminación del proyecto completo. Una actividad no crítica es tal que el tiempo entre su inicio más temprano y su terminación más tardío (como se permiten por el proyecto) es más grande que su duración actual. En este caso, se dice que la actividad no crítica tiene un tiempo de holgura.
6.2 Determinación de la Ruta Crítica
Una Ruta Crítica define una cadena de actividades críticas, las cuales conectan los eventos de inicio y final del diagrama de flechas. Dicho de otra manera, la ruta crítica identifica todas las actividades críticas del proyecto. El método para determinar la Ruta Crítica comprende dos fases: tal como se muestra del ejemplo numérico a continuación:
Figura N° 01: Red de Proyecto:

1ra Fase: Paso hacia adelante: Donde los cálculos comienzan desde el nodo de “inicio” y se mueven al nodo de “terminación”. En cada nodo se calcula el número que representa el tiempo de ocurrencia más temprano del evento correspondiente. Estos números se muestran en la figura anterior dentro de los cuadrados. . En el caso citado, sea ES⎕ i el tiempo de inicio más temprano de todas las actividades que se originan en el evento “i”. Por consiguiente, ESi
representa el tiempo de ocurrencia más temprano del evento “i”. Si i = 1 es el evento de “inicio”, entonces convencionalmente, para los cálculos de ruta crítica, ES1 = 0. Sea Dij la duración de la actividad (i, j). Los cálculos del paso hacia adelante, por consiguiente, se obtienen de la fórmula:
ESj = máx. { ESi + Dij }, para todas las actividades (i, j) definidas
i
donde ES1 = 0. Por consiguiente, a fin de calcular ES j para el evento “j”, ESi para los eventos de comienzo de todas las actividades (i, j) que entran, deben calcularse primero.
Los cálculos del paso hacia adelante aplicados a la figura anterior proporcionan ES1 = 0 como se muestra en el cuadrado sobre el evento 1. Ya que existe solamente una actividad que entra (1, 2) al evento 2 con D12 = 3.
ES2 = ES1 + D12 = 0 + 3
Esto se anota en el cuadro asociado al evento 2. El siguiente evento que se va a considerar es el 3. (Note que el evento 4 no puede considerarse en este punto, ya que ES3 (evento 3) todavía no se conoce). Por consiguiente,
1
1
1
1 11
0
0
193
13
6
6
6
1
13
6
3
A
2
B
f1 0
7
D
3
C
3
E
5
F
4
H
6
G
INICIO TERMINACION
ACTIVIDAD CRÍTICA

ES3 = ES2 + D23 = 3 + 3 = 6
El valor de ES4 se puede obtener ahora. Ya que existen dos actividades que entran (2, 4) y (3, 4).
ES4 = máx. { ES2 + D24 ; ES3 + D34 } = máx. {3 + 2; 6 + 0 } = 6
i = 2, 3
Esto se escribe en el cuadro asociado con el evento 4.
El procedimiento continúa de la misma forma hasta que ES1 se calcula para toda “j”. Por consiguiente:
ES5 = máx. { ES3 + D35 ; ES4 + D45 } = máx. {6 + 3; 6 + 7 } = 13
i = 3, 4
ES6 = máx. { ES3 + D36 ; ES4 + D46 ; ES5 + D56 } = máx. {6 + 2; 6 + 5; 13 + 6 } = 19
i = 3, 4, 5
Estos cálculos terminan el paso hacia adelante.
2da Fase: Paso hacia atrás: Comienzan los cálculos desde el nodo de “terminación” y se mueven hacia el nodo de “inicio”. El número calculado en cada nodo (mostrado dentro de un triángulo, ) representa el tiempo de ocurrencia más tardío del evento correspondiente. ElΔ paso hacia atrás comienza desde el evento de “terminación”. El objetivo de esta fase es calcular LCi , el tiempo de terminación más tardío para todas las actividades que están en el evento “i”. Por consiguiente, i = n es el evento de “terminación”, LCn = ESn inicia el paso hacia atrás. En general, para cualquier nodo “i”, :
LCi = mín. { LCj - Dij }, para todas las actividades (i, j) definidas
i
Los valores de LCi se determinan de la siguiente manera:
LC6 = ES6 = 19
LC5 = LC6 – D56 = 19 – 6 = 13
LC4 = mín. { LC5 – D45 ; LC6 - D46 } = mín. {13 - 7; 19 - 5 } = 6
j = 5, 6
LC3 = mín. { LC4 – D34 ; LC5 – D35 ; LC6 – D36 } = mín. {6 - 0; 13 – 3; 19 - 2 } = 6
j = 4, 5, 6
LC2 = mín. { LC3 – D23 ; LC4 – D24 } = mín. {6 - 3; 6 - 2 } = 3
j = 3, 4

LC1 = LC2 – D12 = 3 – 3 = 0
Esto completa los cálculos del paso hacia atrás.
Las actividades de ruta crítica pueden ahora identificarse usando los resultados de los pasos hacia adelante y hacia atrás. Una actividad (i, j) está en la ruta crítica si satisface las tres condiciones siguientes:
i) ESi = LCi
ii) ESj = LCj
iii) ESj - ESi = LCj - = LCi = Dij
En la gráfica, las actividades (1, 2), (2, 3), (3, 4), (4, 5) y (5, 6) definen la ruta crítica. Este es realmente el tiempo más corto posible para terminar el proyecto. Observe que la ruta crítica debe formar una cadena de actividades conectadas, la cual abarca la red desde el “inicio” hasta la “terminación”.
Determinación de las holguras
Siguiendo la determinación de la ruta critica, deben calcularse las holguras de las actividades no críticas. Naturalmente, una actividad crítica debe tener una holgura cero. De hecho, es la principal razón para que sea crítica.
Antes de mostrar cómo se determinan las holguras, es necesario definir dos nuevos tiempos, los cuales están asociados con cada actividad. Estos son el tiempo de inicio más tardío (LS) y el tiempo de terminación más temprano (EC), los cuales están definidos para la actividad (i, j) por:
LSij = LCi – Dij
Existen dos tipos importantes de holgura: Holgura Total (TF) y Holgura Libre (FF). La Holgura Total TFij para una actividad (i, j) es la diferencia entre el máximo tiempo disponible para realizar la actividad ( = LCj – ESi ) y su duración ( = Dij ); esto es:
TFij = LCj – ESi – Dij = LCj – ECij = LSij –ESj
La Holgura Libre se define suponiendo que todas las actividades comienzan tan temprano como sea posible. En este caso, FFij para la actividad (i, j) es el exceso de tiempo disponible (= ESj – ESi ) sobre su duración ( = Dij ); esto es:
FFij = ESj – ESi – Dij
Los cálculos de ruta crítica junto con las holguras para las actividades no críticas pueden resumirse en la forma conveniente mostrada en la tabla adjunta. Las columnas (1), (2), (3) y (6) se obtienen de los cálculos de la red en el ejemplo antecitado. La información restante puede determinarse de las fórmulas anteriores.
Tabla N° 01: PROGRAMA DE ACTIVIDADES -CPM
Actividad Duración Temprano Tardío Holgura Total Holgura Libre

(i, j)
(1)
(Dij)
(2)
TFij = LSij –ESj
(7)
FFij = ESj – ESi – Dij
(8)
InicioESi ⎕(3)
TerminaciónECij = ESi + LCj - LSij
(4)
InicioLSij = LCi – Dij
(5)
TerminaciónLCj Δ
(6)
(1, 2) 3 0 3 0 3 0* 0(2, 3) 3 3 6 3 6 0* 0(2, 4) 2 3 5 4 6 1 1(3, 4) 0 6 6 6 6 0* 0(3, 5) 3 6 9 10 13 4 4(3, 6) 2 6 8 17 19 11 11(4, 5) 7 6 13 6 13 0* 0(4, 6) 5 6 11 14 19 8 8(5, 6) 6 13 19 13 19 0* 0
Actividad crítica
VII. ADMINISTRACIÓN DE PROYECTOS USANDO TIEMPOS DE TAREA PROBABILÍSTICOS (PERT)
Al revisar proyectos, un gerente a menudo encuentra retrasos imprevistos al llevar a cabo las diferentes tareas, lo cual tiene como resultado un correspondiente retraso en el proyecto completo. Una manera de manejar tales problemas consiste en tomar en cuenta esta variabilidad cuando se estiman los tiempos de terminación individuales.
En lugar de suponer que los tiempos de tarea se conocen con certeza, puede ser más apropiado estimar los tiempos de tarea, tomando en cuenta la incertidumbre. Para revisar tales proyectos se requiere un análisis probabilístico, que se describe a continuación.
Considere el problema de Home Construction, Inc., una compañía que construye casas para una sola familia. Como en el caso determinístico, el gerente de construcción debe primero identificar las principales tareas (y sus predecesores inmediatos) que se necesitan para construir una casa, como se muestra en la Tabla N° 02, adjunta. Según lo aprendido en la sección anterior, estas tareas y sus relaciones de precedencia pueden trazarse en una red de proyecto, como se ilustra en la Figura N° 01.
Tabla N° 02: Predecesores inmediatos para el proyecto de Home Construction, Inc.
TAREA DESCRIPCIÓN PREDECESOR INMEDIATO
ABCDEFGHI
CimientosArmazónTechosPlomeríaCableado eléctricoPuertas y ventanasTerminado interiorTerminado exteriorInspección
NingunaABAC
D, EFF
G, H
Figura N° 01: Red de proyecto para el proyecto de Home Construction, Inc.

7.1 Estimación de los tiempos de terminación de tareas
Los tiempos de terminación de estas tareas son bastante variables debido a la incertidumbre de las condiciones climatológicas, la obtención de suministros, el mantenimiento de las relaciones laborales, etc. Así pues, una sola estimación del tiempo no es apropiada. Para tomar en cuenta esta variabilidad se requiere el conocimiento de la distribución de probabilidad de los tiempos de terminación de cada tarea. Esto, a su vez, requiere el conocimiento de los parámetros de distribución, entre los que se encuentran la media y la varianza. La obtención de la distribución y de sus parámetros, a menudo, es difícil y tardada. Sin embargo, un planteamiento que ha resultado ser confiable en la práctica consiste en aproximar las distribuciones desconocidas mediante una distribución beta. El análisis, en esta sección no requiere la forma exacta de la distribución, sino solamente del conocimiento de tres parámetros: el valor mínimo, el valor máximo y el valor probable, presentados en la Figura N° 02.
Figura N° 02: Distribución Beta de un tiempo de tarea
0 6
8
4 5
732
1
C
B E
D GF
f
H
A
I

En el contexto de las tareas de un proyecto, obtenga tres estimaciones de tiempo para cada tarea:
Tiempo más optimista (a), es decir, el tiempo más corto en el que la tarea puede hacerse.
Tiempo más pesimista (b), es decir, el tiempo más largo que se puede llevar una tarea dentro de lo razonable.
Tiempo más probable (m), es decir, el tiempo que la tarea requiere con más frecuencia en circunstancias normales.
Para una distribución beta, estas tres estimaciones de tiempo se combinan para obtener el valor esperado (medio) y la desviación estándar del tiempo de terminación de una tarea, de acuerdo con las siguientes fórmulas:
Tiempo medio esperado de tarea te = a + 4m + b/6
Desviación estándar de tarea σt = b – a/6
Suponga que la tarea C, colocación del techo, las tres estimaciones obtenidas del subcontratista que lo va a colocar son:
a = 3 semanas
b = 11 semanas
m = 5.5 semanas
Utilizando estas tres estimaciones, el tiempo medio esperado y la desviación estándar de tarea se calculan de la manera siguiente:
tec = a + 4m + b/6 = 3 + 4(5.5) + 11/6 = 6 semanas
σc = b – a/6 = 11 – 3/6 = 1.333 semanas
a m b
Tiempo más
optimista
Tiempo más
probable
Tiempo más
pesimista

El gerente de construcción ha obtenido estas estimaciones y ha hecho los cálculos apropiados para cada una de las tareas restantes, el resultado se muestra en la Tabla N° 03
Tabla N° 03: Estimación de los tiempos de terminación para las tareas de Home Construction, Inc.
TAREA DESCRIPCION ESTIMACIÓN DE TIEMPOS (SEMANAS)
TIEMPO MEDIO ESPERADO DE
TAREA (te)
DESVIACION ESTÁNDAR DE
TAREA (σT )a m bA Cimientos 2 3 4 3 0.333B Armazón 4 7.5 8 7 0.667C Techos 3 5.5 11 6 1.333D Plomería 2.5 4 5.5 4 0.500E Cableado eléctrico 2 3 4 3 0.333F Puertas y ventanas 3 5 7 5 0.667G Terminado interior 3 3.5 7 4 0.667f1 Ficticia 0 0 0 0 0.000H Terminado exterior 2 5 8 5 1.000I Inspección 1 1 1 1 0.000
7.4 Cálculo del tiempo medio esperado de terminación del proyecto
Utilizando los tiempos de terminación medios para las tareas de la tabla N° 03, junto con la red de proyecto de la Figura N° 01, se puede calcular el tiempo de terminación más temprano esperado para el proyecto completo en, exactamente, la misma forma en que se hace para proyectos con tiempos de tarea determinísticos como se describió en la sección precedente. De manera similar, los tiempos últimos de inicio y terminación se calculan como fueron descritos en la sección precedente. Los resultados se muestran en la Figura N° 03.
Figura N° 03: Red de proyecto y cálculos para obtener la ruta crítica para el proyecto de Home Construction, Inc.
0 6
8
4 5
732
1
C
B E
D GF
f
H
A
I
3
7
4
6
3
5
5
4
0
1
0
0
3
3
19
19
24
29
24 28
10 1629 30
10
16
29
30

7.5 Análisis probabilístico del tiempo de terminación del proyecto
Recuerde que el tiempo de terminación del proyecto calculado en la sección anterior es el tiempo de terminación esperado. El tiempo de terminación real puede variar debido a que los mismos tiempos de terminación de las tareas son variables. Puesto que el tiempo de terminación esperado de 30 semanas, hasta cierto grado, no es confiable, el gerente de construcción deberá hacerse preguntas como las siguientes:
a. ¿Cuál es la probabilidad de cumplir con una fecha específica de terminación del proyecto? Por ejemplo, ¿cuál es la probabilidad de construir la casa en 32 semanas?
b. ¿Qué fecha de terminación puede cumplirse con un nivel dado de confianza? Por ejemplo, ¿cuál es la fecha última de terminación en la cual usted tiene una confianza del 95% de cumplir?
Para responder a preguntas probabilísticas, usted necesita la distribución de probabilidad para el tiempo de terminación del proyecto. Obtener esa distribución, por lo general, es algo imposible, debido a las complejas relaciones de precedencia entre las tareas individuales. En la práctica, la distribución real del tiempo de terminación del proyecto se aproxima mediante una distribución normal. Para utilizar esta aproximación se requieren las siguientes suposiciones:
1. Las tareas que se determinaron como críticas utilizando los tiempos de tarea esperados siguen siendo críticas, incluso si varían los tiempos de terminación reales de las tareas.
Para el proyecto de Home Construction Inc., esta suposición puede ser o no verdadera. Por ejemplo, la suposición no es verdadera si los tiempos de terminación reales de todas las tareas son iguales a sus valores esperados, excepto para G, que necesita más de cinco semanas para llevarse a cabo. En este caso, cambian las tareas críticas. La tarea G ahora se vuelve crítica mientras que la tarea H ya no es crítica.
Sin embargo, si la suposición es verdadera, el tiempo de terminación del proyecto es la suma de los tiempos de terminación de las tareas críticas individuales a lo largo de una trayectoria crítica. En este ejemplo, solamente existe una trayectoria crítica, de modo que,Tiempo medio esperado de terminación del proyecto = (tiempo medio esperado de terminación de la tarea A) + (tiempo medio esperado de terminación de la tarea B) + (tiempo medio esperado de terminación de la tarea C) + (tiempo medio esperado de terminación de la tarea E) + (tiempo medio esperado de terminación de la tarea F) + (tiempo medio esperado de terminación de la tarea H) + (tiempo medio esperado de terminación de la tarea I).
2. El tiempo de terminación de cada tarea es independiente del tiempo de terminación de cualquier otra tarea, es decir, la cantidad de tiempo que se lleva completar una tarea no depende del tiempo que se lleva terminar cualquier otra tarea.
Para el proyecto de Home Construction, Inc., esta suposición también puede ser o no verdadera. Por ejemplo, suponga que se utiliza la misma máquina para terminar tanto el interior como el exterior (tareas G y H). Si una descomposición de la máquina ocasiona un retraso en el acabado del interior (tarea G), entonces es muy probable que se presente un retraso parecido en el acabado del exterior (tarea H). En este caso, las tareas G y H son dependientes. Sin embargo, si se utilizan dos máquinas diferentes para llevar a cabo las tareas, la suposición de independencia es probablemente válida.

Tal suposición de independencia, junto con la suposición 1, le permite llegar a la conclusión de que para cualquier trayectoria crítica:
Tiempo medio esperado de terminación del proyecto = suma de los tiempos esperados de terminación de todas las tareas a lo largo de esa trayectoria crítica.Para el proyecto de Home Construction, Inc., μ = teA + teB + teC + teE + teF + teH + teI μ = 3 + 7 + 6 + 3 + 5 + 5 + 1 μ = 30 semanas
3. Varianza del tiempo de terminación del proyecto = suma de las varianzas de los tiempos esperados de terminación de las tareas a lo largo de esa trayectoria crítica.
V = VA + VB + VC + VE + VF + VH + VI y; dado que: V = σ2, se tiene:
V = (0.333)2 + (0.667)2 + (1.333)2 + (0.333)2 + (0.667)2 + (1.000)2 + (0.000)2 V = 3.889 semanas.
En el caso de que una red de proyecto tenga más de una trayectoria crítica, calcule el valor esperado y la varianza del tiempo de terminación del proyecto a lo largo de cada trayectoria crítica. Entonces, para cálculos posteriores, escoja aquella cuya varianza se la más grande. (Todas las trayectorias críticas proporcionarán el mismo tiempo de terminación esperado).
4. El tiempo de terminación del proyecto sigue una distribución normal con la media y la varianza calculadas en la suposición 2.
Esta suposición es válida para proyectos que tienen un gran número de tareas individuales a lo largo de una trayectoria crítica, debido al teorema del límite central.
Con estas tres suposiciones, el tiempo de terminación del proyecto de Home Construction, Inc., tiene una distribución normal con una media de 30 semanas y una varianza de 3.889 semanas (es decir, una desviación estándar de σ = √3.889 = 1.972 semanas). Utilizando esta información, usted puede responder a las preguntas planteadas anteriormente:
a. ¿Cuál es la probabilidad de terminar una casa en 32 semanas?De su conocimiento de la distribución normal, la respuesta a esta pregunta es equivalente a encontrar el área que se encuentra a la izquierda del 32 bajo una distribución normal con una media de 30 y una desviación estándar de 1.972, como se ilustra en la Figura N° 04.
Se tiene:“X”: Terminación de la casaμ = 30 semanasσ = 1.972 semanas
p ( X ≤ 32 ) = p ( X – μ / σ ≤ 32 – 30 / 1.972 ) = p ( Z ≤ 1.014 )
Revisando la tabla de distribución normal, se tiene:

0.01
1.01 1.014 1.02
0.004
x
0.3438 ? 0.3461
0.0023
0.01 / 0.0023 = 0.004 / x
x = 0.00092
? = 0.3438 + 0.00092 = 0.34472
∴ p ( X ≤ 32 ) = 0.50000 + 0.34472 = 0.84472 = 84.472%
En otras palabras, la probabilidad de construir la casa en 32 semanas es de 84.47%
Figura N° 04: Cálculo de la probabilidad de cumplir con una fecha de logro de objetivo

b. ¿Qué fecha de terminación deberá darse de modo que se tenga 95% de confianza de que la casa estará terminada en ese tiempo?Para responder a esta pregunta, usted necesita determinar el punto “X” donde el área bajo la distribución normal que se encuentra a la izquierda del punto es 0.95, como se muestra en la Figura N° 05. En la tabla normal se obtiene el valor Z de 1.645, para lo cual el área que está a la izquierda es de 0.95. Puede, ahora, calcular el valor de X, a partir de la definición de Z, de la manera siguiente:
Se tiene:“X”: Terminación de la casa = ?μ = 30 semanasσ = 1.972 semanasNc = 95% = 0.9500 = 0.5000 + 0.4500
= 30μ
24.084
33.944
35.916
28.028
26.056
31.972
0 1 2 3-1-2 -1-3
1.014
32
0.50000 0.34472
X
+∞-∞
-∞ +∞
Z
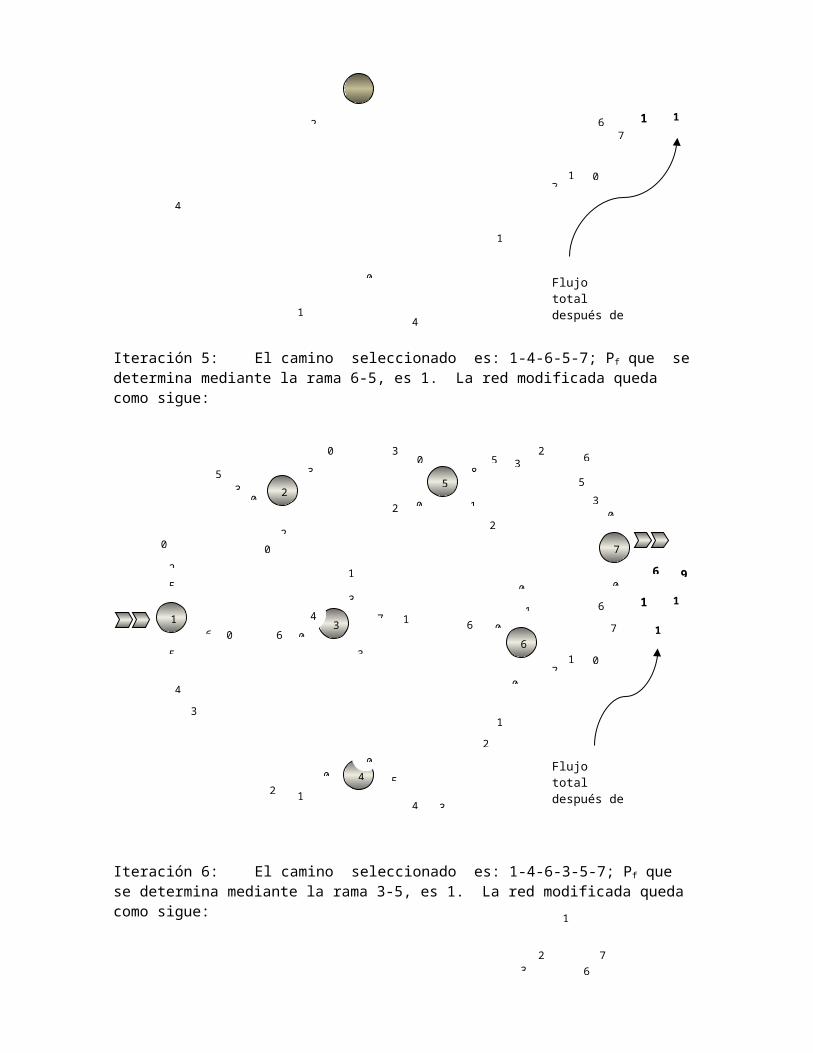
0.001
0.4495 0.4500 0.4505
0.0005
x
1.64 ? 1.65
0.01
0.001 / 0.01 = 0.0005 / x
x = 0.005
? = Z = 1.64 + 0.005
Z = 1.645
Se sabe que:
Z = X - μ / σ
1.645 = X – 30 / 1.972
X = 33.24394
En otras palabras, usted puede tener el 95% de confianza de cumplir en una fecha meta con un tiempo de terminación de 33.24 semanas.

Figura N° 05: Cálculo de la fecha de logro de objetivo con un nivel dado de confianza
= 30μ
24.084
33.944
35.916
28.028
26.056
31.972
0 1 2 3-1-2 -1-3
1.645
33.24394
0.50000 0.4500
X
+∞-∞
-∞ +∞
Z